Ipari folyamatirányítás
|
|
|
- Nándor Balog
- 6 évvel ezelőtt
- Látták:
Átírás
1 Mechatronika továbbképzé Ipari folyamatirányítá 3. Előadá A zabályozáok minőégi jellemzői. Alapjelköveté é zavarelhárítá. Stabilitá.
2 Általáno követelmények Értéktartó zabályozá biztoíta a zabályozott jellemző állandó értéken tartáát a zavaró hatáok ellenére. Követő zabályozá biztoíta, hogy a zabályozott jellemző jól (pontoan, gyoran) kövee az alapjel változáát a zavaráok ellenére. Stabilitá: hogy egyáltalán beálljon a zabályozáon belül egy állandóult állapot. Ideáli zabályozában a zabályozott jellemző idõbeli lefolyáa megegyezne az alapjel időbeli lefolyáával. Ez a zabályozái körben levő energiatároló tagok okozta kéleltetéek miatt nem lehetége. További akadályok: a rendelkező jel telítődée, zajerőíté, holtidő tagok jelenléte.
3 A zabályozá minőégi jellemzői A zabályozott jellemző maximáli túllendülée: A zabályozá dinamiku pontoága: D % A zabályozái idő:
4 Zárt zabályozái kör általáno hatávázlata
5 Átviteli függvények zárt rendzer eredő átviteli függvénye zavarójel átviteli függvénye hibaátviteli függvény zavarójel-hibaátviteli függvénye hurokátviteli függvény
6 Szabályozá típuzáma h v - hurokátviteli függvény (a felnyitott kör átviteli függvénye) h K i 0 0 ; 0 K: hurokerőítéi tényező; i: a zárt zabályozá típuzáma (0); 0 (): állandóult állapotban nem érezteti hatáát (tranzien állapotban igen) v A 0 v 0v ; 0v - a vizacatoló tag átviteli függvénye, kizárólag arányo jellegű lehet e e A e 0 j 0e ; 0e - az előremutató ág átviteli függvénye
7 Statiku zavarelhárítái tulajdonág ez ez z W A - a zavarójel előremutató ága ez 0 z W z 0 k 0z ; 0z i k Aez 0 z ha X K i a X X z lim t x x z t t 0 - a zavarójelre vonatkozó átviteli függvény = 0 ha i > k = A ez / K ha i = k = A ez / (K+) ha i = k = 0 = ha i < k a zabályozá nem valóul meg Telje tatiku zavarkompenzáció akkor valóul meg, ha a zabályozó ( ) típuzáma nagyobb, mint a zavarjel-átvivő tag ( z ) típuzáma. Egyenlőég eetén a hurokerőíté növeléével cökkenthető a zavará mértéke.
8 Statiku alapjelkövetéi tulajdonág W i j Ae 0e ha X K i z a rendzer átviteli függvénye W r i i K 0 ha X z 0 - hibaátviteli függvény Statiku alapjelköveté akkor valóul meg, ha állandóult állapotban a hibafüggvény értéke nulla: w r () = 0. Vizgált alapjel-típuok: x x x a a a t t ; X t t ; X - lépcőfüggvény; típuzáma: t t ; X a 3 a a Határérték-tétel alapján: - ebeégugrá; típuzáma: - gyoruláugrá; típuzáma: 3 x x r lim W X a 0 lim W X 0 r a
9 0 típuú zabályozá tatiku alapjelkövetée X X X a a a 3 ; ; ; x x r x x r r Ae0 e lim 0 K lim 0 K 0 lim 0 K lim 0 K K Ae K 3 - állandóult állapotban a hiba az alapjel (K+)-ed réze - -nél magaabb típuzámú alapjelt a rendzer nem képe követni Termézeteen az -nél magaabb típuzámú alapjelnek cak rendzervizgálati jelentőége van, (gyakorlatban nem lehet végtelen jel a rendzerben). 0 típuú zabályozának állandó alapjelnél a követéi hibája a K hurokerőíté növeléével cökkenthető. K felő határát a tabilitái feltételek zabják meg.
10 típuú zabályozá tatiku alapjelkövetée X X X a a a ; x ; x 3 ; x r x r r 0 lim 0 lim lim 0 lim 0 A e 0e K K 0 0 K K A e K K - típuzámú (állandó) alapjelt a rendzer hiba nélkül követ - típuzámú jelre állandóult állapotban a hiba az alapjel ebeégének K-ad réze - 3-a típuzámú alapjelt a rendzer nem képe követni típuú zabályozá állandó alapjelt hiba nélkül követ, típuú alapjelnél a követéi hiba a K hurokerőíté növeléével cökkenthető. K felő határát itt i a tabilitái feltételek zabják meg.
11 típuú zabályozá tatiku alapjelkövetée X X X a a a 3 ; ; ; x x r x x r r lim 0 lim 0 lim 0 lim 0 A e K 0e K K K A e K 0 K - típuzámú (állandó) alapjelt a rendzer hiba nélkül követ - típuzámú (állandó ebeégű) alapjelt a rendzer hiba nélkül követ - állandóult állapotban a hiba az alapjel K-ad réze típuú zabályozá é típuú alapjelt hiba nélkül követ, 3 típuú alapjelnél a követéi hiba a K hurokerőíté növeléével cökkenthető. K felő határát itt i a tabilitái feltételek zabják meg. Általában megállapítható, hogy egy zabályozá a aját típuzámánál kiebb vagy azzal megegyező típuzámú alapjelt állandóult állapotban hiba nélkül követ, eggyel nagyobb típuzámú alapjel eetén a hiba a körerőítéel fordítottan arányo, kettővel vagy többel nagyobb típuzámú alapjelt pedig a rendzer nem képe követni.
12 Stabilitá fizikai képe Stabilitá: a zabályozái folyamat képe a rendzert érő bármilyen zavará hatáának kiküzöböléére, illetve kívánt mértékű cökkentéére. S: tabili rendzer zabályozott jellemzője legfeljebb cillapított lengéeket végez. H: tabilitá határeete: állandó amplitúdójú lengéek aperiodiku gerjezté (zavará) mellett. L: labili rendzer: a lengéek amplitúdója időben növekvő.
13 Stabilitá fizikai képe A lengéi hajlam forráa: a K hurokerőíté mértéke; az energiatároló, valamint (főként) a holtidő tagok jelenléte.
14 A tabilitá matematikai megfogalmazáa
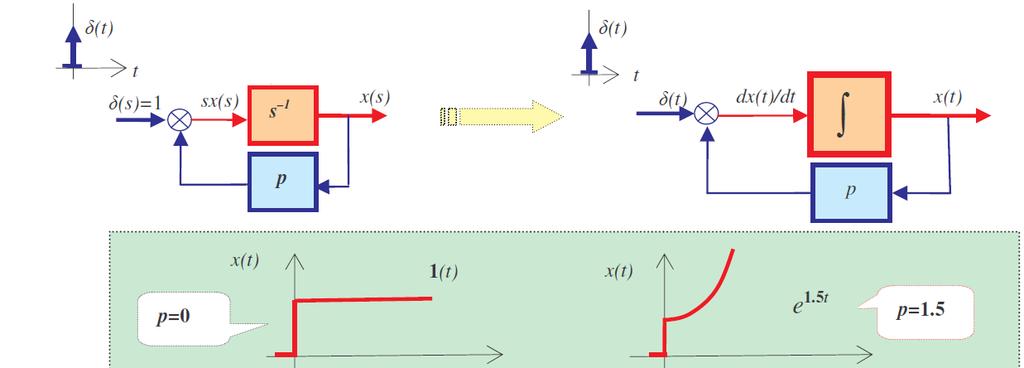
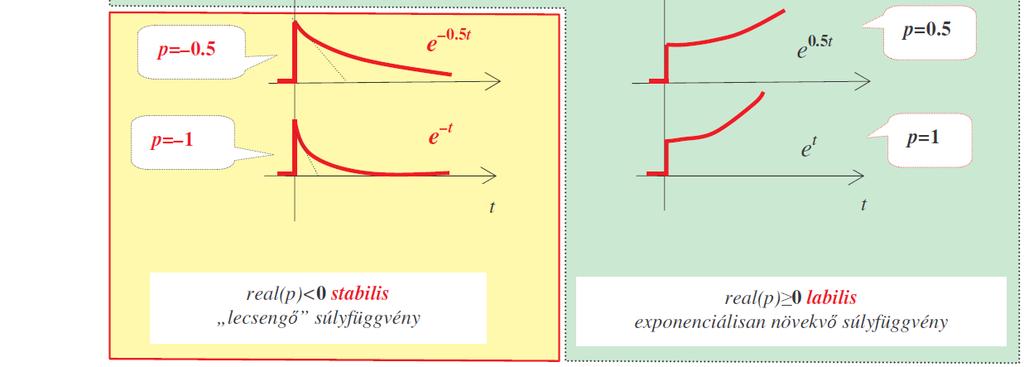
15
16 A tabilitá matematikai megfogalmazáa A tabilitá zükége é elégége feltétele: az eredő átviteli függvény minden pólua a negatív félíkon legyen, azaz a karakteriztiku egyenlet minden gyökének való réze zigorúan negatív legyen. zárt rendzer eredő átviteli függvénye zavarójel átviteli függvénye 0 v Karakteriztiku egyenlet
17 A tabilitá matematikai megfogalmazáa periodiku labilitá aperiodiku labilitá Az átviteli függvény lehetége pólu zéru elozláa
18 Routh-féle tabilitái kritérium Karakteriztiku egyenlet: Routh éma: A orok hoza egyre cökken (n -ed fokú polinomhoz n + or). A rendzer tabili, ha a karakteriztiku polinom minden együtthatója pozitív é a éma elő ozlopának minden eleme pozitív. Az előjelváltáok záma egyenlő a jobb félíkra eő póluok zámával. Nulla megjelenée eetén ki értékű tetzőlege zámmal helyetteítve folytatható (ilyenkor a rendzer a tabilitá határán áll, apró modellhibák eetén akár intabil i lehet).
19 Routh-féle tabilitái kritérium alkalmazáa Hatávázlat: A felnyitott kör átviteli függvénye: A karakteriztiku egyenlet: Például: K 0 0 K 0 K 4, j K 70,3 7 0 j K 44 8, j Routh éma: 0 7 K (70-K)/7 K Stabili, cillapított lengő jelleg Határeet, állandó amplitúdójú lengő jelleg Labili, növekvő amplitúdójú lengő jelleg A tabilitá feltétele: 0 < K < 70 K = 70 a kritiku körerőíté
20 Hurwitz-féle tabilitái kritérium Karakteriztiku egyenlet: Hurwitz determinán: A tabilitá zükége é elégége feltétele, hogy a karakteriztiku egyenlet valamennyi együtthatója, valamint a D n determinán é ennek minden főátlóra támazkodó aldeterminána pozitív legyen. Például: K K 0 0 K 70 K K 7 K 70 K 7 7 0
21 Mihajlov-Leonhard tabilitái kritérium Karakteriztiku egyenlet: = j behelyetteítéel: A rendzer akkor tabil, ha a karakteriztiku egyenlet helygörbéje : 0 -re pontoan annyi negyeden megy át, amennyi az egyenlet foka.
22 Egyzerűített Nyquit tabilitái kritérium A zárt rendzer átviteli függvénye: 0 0 j 0 j W 0 - hurokátviteli függvény (a felnyitott kör átviteli függvénye) e e e v Az egyzerűített Nyquit kritérium alkalmazáának feltétele: 0 -nak ninc pozitív való rézű (a képzete tengelytől jobbra eő) pólua. 0 Az egyzerűített Nyquit kritérium: a zárt rendzer akkor tabil, ha 0 (j) jelleggörbén 0 tól felé haladva a (-,0) pont mindig balkézre eik.
23 Fázitartalék Nyquit-diagramon Rende vielkedéű zabályozái rendzer: a felnyitott kör (j) frekvenciafüggvényének jelleggörbéje nem hagyja el az egyégugarú kört, miután abba belépett. A fázitartalék: t arg j c j c t > 0 a rendzer tabili; t 0 a rendzer a tabilitá határán van; t < 0 a rendzer labili. Megfelelő minőéghez: t > 30.
24 Erőítétartalék Nyquit-diagramon Az erőítétartalék: arg jt j t < a rendzer tabili; a rendzer a tabilitá határán van; > a rendzer labili.
25 Fázi- é erőítétartalék Bode diagramon A Nyquit diagram egyégugarú körének a Bode diagram 0 db tengelye felel meg. Ha az (w) amplitúdómenet -0 db/dekád meredekégű zakazon metzi a 0 db tengelyt, a rendzer biztoan tabili. Ha az (w) amplitúdómenet -60 db/dekád meredekégű zakazon metzi a 0 db tengelyt, a rendzer biztoan labili. Ha az (w) amplitúdómenet -40 db/dekád meredekégű zakazon metzi a 0 db tengelyt, a tabilitá eldöntééhez zükég van a fázimenet vizgálatára i.
26 Strukturáli tabilitá Egy zabályozái rendzer akkor trukturálian tabili, ha a K hurokerőítéi tényező bármely értékére tabil marad. Például minden olyan rendzer, ahol a felnyitott kör átviteli függvényének nevezője legfeljebb máodfokú, trukturálian tabili.
27 Feltétele tabilitá A K hurokerőítéi tényező adott értékére tabili, de mind növelée, mind cökkentée eetén labiliá váló rendzerek. Például: K növeléével az A pont balra tolódik el é átlépheti a (-,0) pontot; K cökkentée eetén a B pont jobbra tolódik el.
28 Stabilitávizgálat Nichol diagramon Nichol diagram: fázitartalék erőíté özerendelé. A komplex zámík (-,0) pontja a Nichol diagram kezdőpontja. t {db}=0 > 0 a rendzer tabili; t {db}=0 = 0 a rendzer a tabilitá határán található; t {db}=0 < 0 a rendzer labili.
29 Jelformálá (kompenzáció) élja: tabilitá biztoítáa; állandóult üzembeli hiba cökkentée; minőégi jellemzők javítáa. Lehet: oro; vizacatoláo.
30 Klaziku PID zabályozá Minorky (9) Directional tability of automatically teered bodie, J. Am. Soc. Naval Eng., 34, p.84 a kormányook tapaztalati eredményei alapján előzör fejleztett ki PID zabályozát. Az USS New Mexico hajón kipróbált módzer.6 iránytabilitát biztoított, jobbat, mint amire a legtöbb kormányo képe volt. P arányo; I integráló; D differenciáló; Való tag zámlálójának foka nem lehet nagyobb a nevezőnél. Soro alak: Általában τ é τ a zakaz két legnagyobb időállandójával egyenlőnek válaztjuk, T -t kiebbnek.
31 PID zabályozó hangoláa
32 PID zabályozó hangoláa
33 PID zabályozó hangoláa
34 PID zabályozó hangoláa holtidő zakazhoz Oppelt módzer
35 PID zabályozó hangoláa integráló zakazhoz Oppelt módzer
36 Pólukioztá PID zabályozó átviteli függvénye K K K D D I p K K K K K D I D I p D D p Együttható azonoítáal:
37 Pólukioztá Szabályozó átviteli függvénye Szakaz átviteli függvénye Vizacatolt zabályozái kör karakteriztiku polinomja (átviteli függvény nevezője): Kívánt karakteriztiku polinom: Együttható-azonoítáal:
38 Holtidő-kompenzáció Smith prediktor Önbeálló zakaz eetén alkalmazható. Feltétel: imerni kell a t holtidő értékét.
39 Általáno özetett tag Általáno özetett tagot (PIDTH) modellező hatávázlat: - arányo, integráló é differenciáló hatá; - energiatárolók; - holtidő tag. h h T D I I I P T D I P h e T T T T T T A e T T T T A
40 Általáno özetett tag tulajdonágai Holtidő nélküli eetben az általáno frekvencia-függvény: Bode diagram amplitúdómenetének kifrekvenciá meredekége: 0i db/dekád Nagyfrekvenciá meredekég: 0(ki) db/dekád Közbenő frekvenciákon a meredekég beclée: T ha < / T; T ha > / T
41 Általáno özetett tag tulajdonágai Például: K T T T 3 K = 00; T = 00 ; T = 0. ; T 3 = ; = 3 ; = ; Bode diagram:
42 Negatív vizacatolá hatáa Ideáli integráló tag arányo taggal vizacatolva elvezti integráló jellegét e T A I T I A A e T I T A TI A A TIT A Egytároló integráló tagot arányo taggal vizacatolva: kéttároló arányo tagot kapunk Egytároló differenciáló tagot arányo taggal vizacatolva: változatlan jelleg mellett megnövekedik a tároló időállandója (cökken a határfrekvencia, ameddig a differenciáló hatá érvényeül). e TD T A T AT D D T

43 Soro jelformálá arányo (P) taggal Az arányo jelformáló nem változtat a fázimeneten. A fázitartalék beállítáára alkalma, a működé gyorítáa céljából (a hurokerőíté növeléével). Az fázitartalék ideáli értéke: 60, mert - a túllendülé lépcőfüggvény alapjel eetén mindöze 4%; - kiebb fázitartalék eetén növekedik a lengéi hajlam; - a zabályozái idő itt minimáli; - nagyobb fázitartalék eetén növekedik a zabályozái idő.
44 Soro jelformálá arányo (P) taggal z j jt jt jt 3 Itt T =.59 m; = 68 rad/; f = 00 Hz; T = 0.59 m; f = khz; T 3 = m; f 3 = 0 khz; f k = 700 Hz; A k = A(700 Hz) = 7 db; A kompenzátor erőítée: A PdB = 7 db, azaz A P = exp(a PdB /0) = 7; Így a követéi hiba /(A P +) =.5%


45 Soro jelformálá arányo-integráló (PI) taggal Arányo é különböző beállítáú arányo-integráló jelformálóval kapott rendzerválaz egyégimpulzu alapjelre (átviteli függvény). A PI jelformáló típuzáma, ezért állandóult állapotban az alapjelkövetéi hibája nulla. Az integrátor időállandója határozza meg a lengéi hajlam mértékét, valamint a zabályozái idő nagyágát.
46 Soro jelformálá arányo-integráló (PI) taggal Soro PI jelformálá elve. Megvalóítá műveleti erőítővel. I P I P PI T j A j A j I I I P I T f A T ;
47 Soro jelformálá arányo-integráló (PI) taggal Itt f I << f k azért, hogy az integrátor ne befolyáolja a fázitartalékot. További cökkentée indokolatlanul növelné a zabályozái időt.
48 Soro jelformálá arányo-differenciáló (PD) taggal Ideáli PD taggal: Megvalóítható PD taggal: P D P D P k A T A T A K P D K P K D P k T A T T A T T A
49 Soro jelformálá arányo-differenciáló (PD) taggal Szakaz: K = 00; T = 0.3 ; T = 0.0 ; T 3 = ; 3 T j T j T j K j z Ideáli PD taggal: A P = 0; T D = T j T j T j A T KA j j P D P k z Egytároló PD taggal: A P = 0; T D = 0.03 ; T K = ; K P D K P k z T j T j T j T j A T T KA j j 3
.")
50 Soro jelformálá arányo-integráló-differenciáló (PID) taggal A PID jelformáló differenciáló özetevője növeli a fázitartalékot é ezáltal lehetővé tezi a zabályozá gyorítáát (nagyobb frekvencián lez az eredő fázitartalék 60 ). Ideáli PID jelformáló aját Bode diagramja Ki frekvencián az integráló, nagy frekvencián a differenciáló jelleg érvényeül.
51 Soro jelformálá arányo-integráló-differenciáló (PID) taggal Soro PID jelformálá elve. Megvalóítá műveleti erőítővel. D I P D I P PID T j T j A j j A j D D P D D I I I P I T f A T T f A T ; ; ;
52 PID kompenzátor A PdB = 34 db ott, ahol a fázitartalék 5, azaz f k =. khz. f D = f k azért, hogy a fázitartalék 60 -ra növekedjen. A PI jelformáló beállítáához haonlóan f I = f k /0. A nagyobb kritiku frekvencia gyorítja a zabályozát.
53 Állítható PID kompenzátor Lehetővé tezi a paraméterek egymától független változtatáát é a zabályozá kíérleti úton történő optimáli beállítáát.

54 Állítható PID kompenzátor A beállítá menete: Közelítő paraméter-zámítá: a lengéi frekvencia megállapítáa f L f k ; az erőíté az itt érvénye érték: A P = A L ; a differenciáló határ-frekvencia: f D = f L ; az integráló határ-frekvencia: f I = f L /0. Az S kapcolóval rövidre zárjuk az integrátor kondenzátorát, így kikapcolva az integráló funkciót; R D = 0-val kikapcoljuk a differenciáló funkciót; R P értékét addig növeljük, míg enyhén cillapított lengő válazt kapunk (felő görbe itt a fázitartalék 5 ); R D értékét a megfelelő cillapítá elérééig növeljük (aló görbe itt a fázitartalék 60 ); Kinyitjuk S-t é R I -t addig növeljük, míg a zabályozái idő minimálira cökken.
55 Jelformálá vizacatoláal Zavará hiányában a vizacatolá egyenértékű egy megfelelő paraméterekkel rendelkező oro jelformáláal. Zavarelhárítához elengedhetetlen a zabályozott jellemző vizacatoláa.
56 Jelformálá holtidő zabályozában Holtidő zabályozá é jelei A H = eetén. A H = - re a tabilitá határán; A H > - re labili; A H < - re tabili, de nagy hibával: Holtidő zabályozá Nyquit diagramja:
57 Holtidő tag kompenzáláa integráló taggal 45 fázitartalékhoz:
( ) abszolút érték függvényét!
 abszolút érték függvényét!") Modulzáró példák. Folytono lineári rendzerek leíráa az idő-, az operátor- é a frekvenciatartományban. Egy lineári rendzer frekvenciafüggvényének fázimenete: (")= # 90 # 5". Írja fel a rendzer átviteli
Modulzáró példák. Folytono lineári rendzerek leíráa az idő-, az operátor- é a frekvenciatartományban. Egy lineári rendzer frekvenciafüggvényének fázimenete: (")= # 90 # 5". Írja fel a rendzer átviteli
Márkus Zsolt Értelmezések, munkapont beállítások BMF -
 Márku Zolt marku.zolt@qo.hu Értelmezéek, munkapont beállítáok Negatív vizacatoláú rendzerek alapvető követelménye hogy: az x zabályozott jellemző a lehető legnagyobb mértékben közelíte meg az x a alapjellel
Márku Zolt marku.zolt@qo.hu Értelmezéek, munkapont beállítáok Negatív vizacatoláú rendzerek alapvető követelménye hogy: az x zabályozott jellemző a lehető legnagyobb mértékben közelíte meg az x a alapjellel
Irányítástechnika 3. előadás
 Irányítátechnika 3. előadá Dr. Kovác Levente 203. 04. 6. 203.04.6. Tartalom Laplace tranzformáció, fontoabb jelek Laplace tranzformáltja Stabilitá alaptétele Bode diagram, Bode-féle tabilitá kritérium
Irányítátechnika 3. előadá Dr. Kovác Levente 203. 04. 6. 203.04.6. Tartalom Laplace tranzformáció, fontoabb jelek Laplace tranzformáltja Stabilitá alaptétele Bode diagram, Bode-féle tabilitá kritérium
A maximálisan lapos esetben a hurokerősítés Bode diagramjának elhelyezkedése Q * p így is írható:
 A maximálian lapo eetben a hurokerőíté Bode diagramjának elhelyezkedée Q * p így i írható: Q * p H0 H0 Ha» é H 0», akkor Q * p H 0 Vagyi a maximálian lapo eetben (ahol Q * p = ): H 0 = Az ennek megfelelő
A maximálian lapo eetben a hurokerőíté Bode diagramjának elhelyezkedée Q * p így i írható: Q * p H0 H0 Ha» é H 0», akkor Q * p H 0 Vagyi a maximálian lapo eetben (ahol Q * p = ): H 0 = Az ennek megfelelő
Frekvenciatartomány Irányítástechnika PE MI BSc 1
 Frekvenciatartomány ny 008.03.4. Irányítátechnika PE MI BSc Frekvenciatartomány bevezetéének indoka: általában időtartománybeli válaz kell alkalmazott teztelek i ezt indokolák információ rendzerek eetében
Frekvenciatartomány ny 008.03.4. Irányítátechnika PE MI BSc Frekvenciatartomány bevezetéének indoka: általában időtartománybeli válaz kell alkalmazott teztelek i ezt indokolák információ rendzerek eetében
Érzékelők és beavatkozók
 Érzékelők é beavatkozók DC motorok 2. réz egyetemi docen - 1 - A DC motor dinamiku leíráa Villamo egyenlet: R r L r i r v r v e v r a forgóréz kapocfezültége i r a forgóréz árama R r a forgóréz villamo
Érzékelők é beavatkozók DC motorok 2. réz egyetemi docen - 1 - A DC motor dinamiku leíráa Villamo egyenlet: R r L r i r v r v e v r a forgóréz kapocfezültége i r a forgóréz árama R r a forgóréz villamo
FELADATMEGOLDÁSI GYAKORLATOK SZABÁLYOZÁSTECHNIKA
 FELADAMEGOLDÁSI GYAKORLAOK SZABÁLYOZÁSECHNIKA 007 Szabályozátechnika Feladatok - Megoldáok I. Automatizálái é Alkalmazott Informatikai anzék Hetthéy Jenô - Bar Ruth 3. Feladat: Egy folytono rendzer állapottere
FELADAMEGOLDÁSI GYAKORLAOK SZABÁLYOZÁSECHNIKA 007 Szabályozátechnika Feladatok - Megoldáok I. Automatizálái é Alkalmazott Informatikai anzék Hetthéy Jenô - Bar Ruth 3. Feladat: Egy folytono rendzer állapottere
Feladatgy jtemény az Irányítástechnika II. c. tárgyhoz
 BME Közlekedéautomatikai Tanzék Feladatgy jtemény az Irányítátechnika II. c. tárgyhoz Özeállította: Dr. Bokor Józef egyetemi tanár Dr. Gápár Péter egyetemi tanár Bauer Péter tudományo munkatár Lupay Tamá
BME Közlekedéautomatikai Tanzék Feladatgy jtemény az Irányítátechnika II. c. tárgyhoz Özeállította: Dr. Bokor Józef egyetemi tanár Dr. Gápár Péter egyetemi tanár Bauer Péter tudományo munkatár Lupay Tamá
Stabilitás. Input / output rendszerek
 Stabilitá Iput / output redzerek 006.09.4. Stabilitá - bevezeté egyzerűített zemlélet példa zavará utá a magára hagyott redzer vizatér a yugalmi állapotába kvázitacioáriu állapotba kerül végtelebe tart
Stabilitá Iput / output redzerek 006.09.4. Stabilitá - bevezeté egyzerűített zemlélet példa zavará utá a magára hagyott redzer vizatér a yugalmi állapotába kvázitacioáriu állapotba kerül végtelebe tart
Irányítástechnika 4. előadás
 Iránítátechnika 4. előadá Dr. Kovác Levente 3. 4. 3. 3.5.. artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi
Iránítátechnika 4. előadá Dr. Kovác Levente 3. 4. 3. 3.5.. artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi
Irányítástechnika Elıadás. Zárt szabályozási körök stabilitása
 Irányítástechnika 2 7. Elıadás Zárt szabályozási körök stabilitása Irodalom - Csáki Frigyes, Bars Ruth: Automatika.1974 - Mórocz István: Irányítástechnika I. Analóg szabályozástechnika. 1996 - Benjamin
Irányítástechnika 2 7. Elıadás Zárt szabályozási körök stabilitása Irodalom - Csáki Frigyes, Bars Ruth: Automatika.1974 - Mórocz István: Irányítástechnika I. Analóg szabályozástechnika. 1996 - Benjamin
Forgó mágneses tér létrehozása
 Forgó mágnee tér létrehozáa 3 f-ú tekercelé, pólupárok záma: p=1 A póluoztá: U X kivezetéekre i=io egyenáram Az indukció kerület menti elozláa: U X kivezetéekre Im=Io amplitúdójú váltakozó áram Az indukció
Forgó mágnee tér létrehozáa 3 f-ú tekercelé, pólupárok záma: p=1 A póluoztá: U X kivezetéekre i=io egyenáram Az indukció kerület menti elozláa: U X kivezetéekre Im=Io amplitúdójú váltakozó áram Az indukció
GÉPSZERKEZETTAN - TERVEZÉS IDŐBEN VÁLTOZÓ IGÉNYBEVÉTEL, KIFÁRADÁS
 GÉPSZERKEZETTAN - TERVEZÉS IDŐBEN VÁLTOZÓ IGÉNYBEVÉTEL, KIFÁRADÁS Változó igénybevétel Állandó amplitudó, periódiku változá Gépzerkezettan, tervezé Kifáradá 2 Alapfogalmak Középfezültég: m, fezültégamplitudó:
GÉPSZERKEZETTAN - TERVEZÉS IDŐBEN VÁLTOZÓ IGÉNYBEVÉTEL, KIFÁRADÁS Változó igénybevétel Állandó amplitudó, periódiku változá Gépzerkezettan, tervezé Kifáradá 2 Alapfogalmak Középfezültég: m, fezültégamplitudó:
A kör harmadik pontjának meghatározásához egy könnyen kiszámítható pontot keressünk
 7. Átviteli ellemzők fogalma é ábrázoláa! A kondenzátor kapacitív reaktanciáa: Z Tehát az áramkör ellemzői a rákapcolt zinuzo el frekvenciáától függenek, ha az áramkör energiatároló elemet, i tartalmaz.
7. Átviteli ellemzők fogalma é ábrázoláa! A kondenzátor kapacitív reaktanciáa: Z Tehát az áramkör ellemzői a rákapcolt zinuzo el frekvenciáától függenek, ha az áramkör energiatároló elemet, i tartalmaz.
SZABÁLYOZÁSI KÖRÖK 2.
 Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
GÉPSZERKEZETTAN - TERVEZÉS IDŐBEN VÁLTOZÓ IGÉNYBEVÉTEL, KIFÁRADÁS
 GÉPSZERKEZETTAN - TERVEZÉS IDŐBEN VÁLTOZÓ IGÉNYBEVÉTEL, KIFÁRADÁS Változó igénybevétel Állandó amplitudó, periódiku változá Kifáradá 2 Alapfogalmak Középfezültég: m, fezültégamplitudó: a, maximáli fezültég:
GÉPSZERKEZETTAN - TERVEZÉS IDŐBEN VÁLTOZÓ IGÉNYBEVÉTEL, KIFÁRADÁS Változó igénybevétel Állandó amplitudó, periódiku változá Kifáradá 2 Alapfogalmak Középfezültég: m, fezültégamplitudó: a, maximáli fezültég:
AUTOMATIKA DE-MFK, Villamosmérnöki Szak Alapfogalmak
 AUOMAIKA DE-MFK, Villamomérnöki Szak.. Alapfogalmak 3-9-8 Automatizálá: Az emberiég történetének gazdaági alapját megadó termeléi folyamat fejl déének azon zakaza, amely menteíti az embert nemcak a fizikai
AUOMAIKA DE-MFK, Villamomérnöki Szak.. Alapfogalmak 3-9-8 Automatizálá: Az emberiég történetének gazdaági alapját megadó termeléi folyamat fejl déének azon zakaza, amely menteíti az embert nemcak a fizikai
Irányítás előrecsatolással (Feed-forward control)
") Iányítá előeatoláal Feed-owad ontol Az iányítái endzeek élja azt biztoítani, hogy a zabályozott olyamat az elvát módon vielkedjen a kimenete eléje az előít étéket előít tanzienekkel valamint az, hogy a
Iányítá előeatoláal Feed-owad ontol Az iányítái endzeek élja azt biztoítani, hogy a zabályozott olyamat az elvát módon vielkedjen a kimenete eléje az előít étéket előít tanzienekkel valamint az, hogy a
Az aszinkron (indukciós) gép.
 gép.") 33 Az azinkron (indukció) gép. Az azinkron gép forgóréz tekercelée kalická, vagy cúzógyűrű. A kalická tekercelé általában a (hornyokban) zigeteletlen vezetőrudakból é a rudakat a forgóréz vatet két homlokfelületén
33 Az azinkron (indukció) gép. Az azinkron gép forgóréz tekercelée kalická, vagy cúzógyűrű. A kalická tekercelé általában a (hornyokban) zigeteletlen vezetőrudakból é a rudakat a forgóréz vatet két homlokfelületén
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra
 SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra") Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
ALKALMAZOTT MŰSZAKI HŐTAN
 TÁMOP-4...F-4//KONV-05-0006 Duáli é modulári képzéfejlezté ALKALMAZOTT MŰSZAKI HŐTAN Prof. Dr. Kezthelyi-Szabó Gábor TÁMOP-4...F-4//KONV-05-0006 Duáli é modulári képzéfejlezté Többfáziú rendzerek. Többfáziú
TÁMOP-4...F-4//KONV-05-0006 Duáli é modulári képzéfejlezté ALKALMAZOTT MŰSZAKI HŐTAN Prof. Dr. Kezthelyi-Szabó Gábor TÁMOP-4...F-4//KONV-05-0006 Duáli é modulári képzéfejlezté Többfáziú rendzerek. Többfáziú
GÉPÉSZETI ALAPISMERETEK
 Gépézeti alapimeretek középzint 2 ÉRETTSÉGI VIZSGA 204. máju 20. GÉPÉSZETI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ EMBERI ERŐFORRÁSOK MINISZTÉRIUMA Fonto tudnivalók
Gépézeti alapimeretek középzint 2 ÉRETTSÉGI VIZSGA 204. máju 20. GÉPÉSZETI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ EMBERI ERŐFORRÁSOK MINISZTÉRIUMA Fonto tudnivalók
Az egységugrás függvény a 0 időpillanatot követően 10 nagyságú jelet ad, valamint K=2. Vizsgáljuk meg a kimenetet:
 II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
Gyakorló feladatok a Kísérletek tervezése és értékelése c. tárgyból Kísérlettervezés témakör
 Gyakorló feladatok a Kíérletek tervezée é értékelée c. tárgyól Kíérlettervezé témakör. példa Nitrálái kíérleteken a kitermelét az alái faktorok függvényéen vizgálták:. a alétromav-adagolá idee [h]. a reagáltatá
Gyakorló feladatok a Kíérletek tervezée é értékelée c. tárgyól Kíérlettervezé témakör. példa Nitrálái kíérleteken a kitermelét az alái faktorok függvényéen vizgálták:. a alétromav-adagolá idee [h]. a reagáltatá
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
A Bode-diagram felvétele
 SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR TÁVKÖZLÉSI TANSZÉK Méréi jegyzőkönyv egédlet Dr. Kuczmann Mikló Válogatott méréek Villamoágtan témakörből II. A Bode-diagram felvétele Győr, 2007 A méréi
SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR TÁVKÖZLÉSI TANSZÉK Méréi jegyzőkönyv egédlet Dr. Kuczmann Mikló Válogatott méréek Villamoágtan témakörből II. A Bode-diagram felvétele Győr, 2007 A méréi
Az átviteli (transzfer) függvény, átviteli karakterisztika, Bode diagrammok
 függvény, átviteli karakterisztika, Bode diagrammok") Elektronka. Bode dagramok, éldák /9 Az átvtel (tranzfer) függvény, átvtel karakterztka, Bode dagrammok.) Tku feladat: Számítuk k adott lezáráok mellett egy lneár hálózat (oerátor tartomány) u j T tranzfer
Elektronka. Bode dagramok, éldák /9 Az átvtel (tranzfer) függvény, átvtel karakterztka, Bode dagrammok.) Tku feladat: Számítuk k adott lezáráok mellett egy lneár hálózat (oerátor tartomány) u j T tranzfer
8. Gyors folyamatok szabályozása
 8. Gyor folyamatok zabályozáa Gyor zabályozá rendzerekről akkor bezélünk, ha az rányított folyamat dőállandó máoder, agy az alatt nagyágrendűek. gyor folyamatok eetében a holtdő általában az rányítá algortmu
8. Gyor folyamatok zabályozáa Gyor zabályozá rendzerekről akkor bezélünk, ha az rányított folyamat dőállandó máoder, agy az alatt nagyágrendűek. gyor folyamatok eetében a holtdő általában az rányítá algortmu
A következő angol szavak rövidítése: Advanced Product Quality Planning. Magyarul minőségtervezésnek szokás nevezni.
 Mi az az APQP? Az APQP egy mozaik zó. A következő angol zavak rövidítée: Advanced Product Quality Planning. Magyarul minőégtervezének zoká nevezni. Ez egy projekt menedzment ezköz, é egyben egy trukturált
Mi az az APQP? Az APQP egy mozaik zó. A következő angol zavak rövidítée: Advanced Product Quality Planning. Magyarul minőégtervezének zoká nevezni. Ez egy projekt menedzment ezköz, é egyben egy trukturált
PID szabályozó tervezése frekvenciatartományban
 ID zabályozó tervezée frekvencatartományban... A zabályozó erítéének hatáa a tabltára A zabályozó erítée az a paraméter, amelyet a zabályozá mköée alatt zámo eetben móoítanak, hangolnak pélául a mnél kebb
ID zabályozó tervezée frekvencatartományban... A zabályozó erítéének hatáa a tabltára A zabályozó erítée az a paraméter, amelyet a zabályozá mköée alatt zámo eetben móoítanak, hangolnak pélául a mnél kebb
2015.06.25. Villámvédelem 3. #5. Elszigetelt villámvédelem tervezése, s biztonsági távolság számítása. Tervezési alapok (norma szerint villámv.
 Magyar Mérnöki Kamara ELEKTROTECHNIKAI TAGOZAT Kötelező zakmai továbbképzé 2015 Villámvédelem #5. Elzigetelt villámvédelem tervezée, biztonági távolág zámítáa Villámvédelem 1 Tervezéi alapok (norma zerint
Magyar Mérnöki Kamara ELEKTROTECHNIKAI TAGOZAT Kötelező zakmai továbbképzé 2015 Villámvédelem #5. Elzigetelt villámvédelem tervezée, biztonági távolág zámítáa Villámvédelem 1 Tervezéi alapok (norma zerint
L-transzformáltja: G(s) = L{g(t)}.
 = L{g(t)}.") Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Dinamika. F = 8 N m 1 = 2 kg m 2 = 3 kg
 Dinamika 1. Vízzinte irányú 8 N nagyágú erővel hatunk az m 1 2 kg tömegű tetre, amely egy fonállal az m 2 3 kg tömegű tethez van kötve, az ábrán látható elrendezében. Mekkora erő fezíti a fonalat, ha a
Dinamika 1. Vízzinte irányú 8 N nagyágú erővel hatunk az m 1 2 kg tömegű tetre, amely egy fonállal az m 2 3 kg tömegű tethez van kötve, az ábrán látható elrendezében. Mekkora erő fezíti a fonalat, ha a
Jeges Zoltán. The mystery of mathematical modelling
 Jege Z.: A MATEMATIKAI MODELLEZÉS... ETO: 51 CONFERENCE PAPER Jege Zoltán Újvidéki Egyetem, Magyar Tannyelvű Tanítóképző Kar, Szabadka Óbudai Egyetem, Budapet zjege@live.com A matematikai modellezé rejtélyei
Jege Z.: A MATEMATIKAI MODELLEZÉS... ETO: 51 CONFERENCE PAPER Jege Zoltán Újvidéki Egyetem, Magyar Tannyelvű Tanítóképző Kar, Szabadka Óbudai Egyetem, Budapet zjege@live.com A matematikai modellezé rejtélyei
Szabályozás Irányítástechnika PE MIK MI BSc 1
 Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
MAKING MODERN LIVING POSSIBLE. Hatékony megoldás minden szinten. Hűtő/Fűtő rendszerek hidraulikai szabályozása KÉZIKÖNYV. abqm.danfoss.
 MAKING MODERN LIVING POSSIBLE Hatékony megoldá minden zinten Hűtő/Fűtő rendzerek hidraulikai zabályozáa abqm.danfo.com KÉZIKÖNYV Tartalom 1.1 Javaolt rendzer kialakítá fűtéi rendzerekhez 4 1.2 Javaolt
MAKING MODERN LIVING POSSIBLE Hatékony megoldá minden zinten Hűtő/Fűtő rendzerek hidraulikai zabályozáa abqm.danfo.com KÉZIKÖNYV Tartalom 1.1 Javaolt rendzer kialakítá fűtéi rendzerekhez 4 1.2 Javaolt
Szinuszjel-illesztő módszer jeltorzulás mérésekhez 1. Bevezetés 2. A mérés elve
 Szinuzjel-illeztő módzer jeltorzulá méréekhez 1. Bevezeté A hangtechnika világában fonto a hangfeldolgozó hardverek, mint például erőítők, zabályozók, analóg-digitáli é digitáli-analóg átalakítók, illetve
Szinuzjel-illeztő módzer jeltorzulá méréekhez 1. Bevezeté A hangtechnika világában fonto a hangfeldolgozó hardverek, mint például erőítők, zabályozók, analóg-digitáli é digitáli-analóg átalakítók, illetve
1. Gyors folyamatok szabályozása
 . Gyor olyamatok zabályozáa Gyor zabályozá redzerekrl akkor bezélük, ha az ráyított olyamat dálladó máoder, agy az alatt agyágredek. gyor olyamatok eetébe a holtd általába az ráyítá algortmu megalóítááál
. Gyor olyamatok zabályozáa Gyor zabályozá redzerekrl akkor bezélük, ha az ráyított olyamat dálladó máoder, agy az alatt agyágredek. gyor olyamatok eetébe a holtd általába az ráyítá algortmu megalóítááál
1.40 VARIFORM (VF) Légcsatorna idomok. Légcsatorna rendszerek
 Légcsatorna idomok. Légcsatorna rendszerek") .40 VARIFORM (VF) égcatrna idmk égcatrna rendzerek Alkalmazá: A VARIFORM idmk lyan zellõztetõ é klímarendzerek kialakítááz, illetve zerelééez aználatók, al a légcatrna-álózatz WESTERFORM vagy SPIKO cöveket
.40 VARIFORM (VF) égcatrna idmk égcatrna rendzerek Alkalmazá: A VARIFORM idmk lyan zellõztetõ é klímarendzerek kialakítááz, illetve zerelééez aználatók, al a légcatrna-álózatz WESTERFORM vagy SPIKO cöveket
Idő-ütemterv hálók - II.
 Előadá:Folia1.doc Idő-ütemterv hálók - II. CPM - CPM létra : Továbbra i gond az átlaolá, a nyitott háló é a meg-nem-zakítható tevékenyég ( termeléközeli ütemtervek ) MPM time : ( METRA Potential' Method
Előadá:Folia1.doc Idő-ütemterv hálók - II. CPM - CPM létra : Továbbra i gond az átlaolá, a nyitott háló é a meg-nem-zakítható tevékenyég ( termeléközeli ütemtervek ) MPM time : ( METRA Potential' Method
A kémiai kötés magasabb szinten
 A kémiai köté magaabb zinten 5-1 Mit kell tudnia a kötéelméletnek? 5- Vegyérték köté elmélet 5-3 Atompályák hibridizációja 5-4 Többzörö kovalen kötéek 5-5 Molekulapálya elmélet 5-6 Delokalizált elektronok:
A kémiai köté magaabb zinten 5-1 Mit kell tudnia a kötéelméletnek? 5- Vegyérték köté elmélet 5-3 Atompályák hibridizációja 5-4 Többzörö kovalen kötéek 5-5 Molekulapálya elmélet 5-6 Delokalizált elektronok:
Kidolgozott minta feladatok kinematikából
 Kidolgozott minta feladatok kinematikából EGYENESVONALÚ EGYNLETES MOZGÁS 1. Egy gépkoci útjának az elő felét, a máik felét ebeéggel tette meg. Mekkora volt az átlagebeége? I. Saját zavainkkal megfogalmazva:
Kidolgozott minta feladatok kinematikából EGYENESVONALÚ EGYNLETES MOZGÁS 1. Egy gépkoci útjának az elő felét, a máik felét ebeéggel tette meg. Mekkora volt az átlagebeége? I. Saját zavainkkal megfogalmazva:
ELEKTRONIKAI TECHNIKUS KÉPZÉS
 ELEKTRONIKAI TECHNIKUS KÉPZÉS 2 0 1 3 M Ű V E L E T I E R Ő S Í T Ő K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Műveleti erőítők...3 Műveleti erőítők fogalma, működéi elve, felépítée...3
ELEKTRONIKAI TECHNIKUS KÉPZÉS 2 0 1 3 M Ű V E L E T I E R Ő S Í T Ő K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Műveleti erőítők...3 Műveleti erőítők fogalma, működéi elve, felépítée...3
Egyedi cölöp süllyedésszámítása
 14. zámú mérnöki kézikönyv Friítve: 2016. áprili Egyedi cölöp üllyedézámítáa Program: Cölöp Fájl: Demo_manual_14.gpi Ennek a mérnöki kézikönyvnek tárgya egy egyedi cölöp GEO5 cölöp programmal való üllyedézámítáának
14. zámú mérnöki kézikönyv Friítve: 2016. áprili Egyedi cölöp üllyedézámítáa Program: Cölöp Fájl: Demo_manual_14.gpi Ennek a mérnöki kézikönyvnek tárgya egy egyedi cölöp GEO5 cölöp programmal való üllyedézámítáának
Tartalomjegyzék. dr. Lublóy László főiskolai docens. Nyomott oszlop vasalásának tervezése
 dr. Lulóy Lázló főikolai docen yomott ozlop vaaláának tervezée oldalzám: 7. 1. Tartalomjegyzék 1. Központoan nyomott ozlop... 1.1. Vaalá tervezée egyzerűített zámítáal... 1..Vaalá tervezée két irányan....
dr. Lulóy Lázló főikolai docen yomott ozlop vaaláának tervezée oldalzám: 7. 1. Tartalomjegyzék 1. Központoan nyomott ozlop... 1.1. Vaalá tervezée egyzerűített zámítáal... 1..Vaalá tervezée két irányan....
A robusztos PID szabályozó tervezése
 A robuzto ID zabályozó tervezée. A gyakorlat célja Robuzto ID zabályozó tervezée harmafokú folyamatra. A zabályozá vzgálata zmulácókkal.. Elmélet bevezet özmert, hogy a zabályozá renzerek tabltáát a zárt
A robuzto ID zabályozó tervezée. A gyakorlat célja Robuzto ID zabályozó tervezée harmafokú folyamatra. A zabályozá vzgálata zmulácókkal.. Elmélet bevezet özmert, hogy a zabályozá renzerek tabltáát a zárt
Tetszőleges mozgások
 Tetzőlege mozgáok Egy turita 5 / ebeéggel megy órát, Miel nagyon zép elyre ér lelaít é 3 / ebeéggel alad egy fél óráig. Cino fiukat/lányokat (Nem kíánt törlendő!) lát meg a táolban, ezért beleúz é 8 /
Tetzőlege mozgáok Egy turita 5 / ebeéggel megy órát, Miel nagyon zép elyre ér lelaít é 3 / ebeéggel alad egy fél óráig. Cino fiukat/lányokat (Nem kíánt törlendő!) lát meg a táolban, ezért beleúz é 8 /
IRÁNYÍTÁSTECHNIKA II. Lineáris szabályozások
 IRÁNYÍTÁSTECHNIKA II. Lineári zabályozáo 8 Tartalomjegyzé. Alapfogalma... 4.. Az irányítá... 4.. Vezérlé, zabályozá... 6.3. Önműödő zabályozáo elvi felépítée... 7.4. Zavarompenzáció... 8.5. Szabályozái
IRÁNYÍTÁSTECHNIKA II. Lineári zabályozáo 8 Tartalomjegyzé. Alapfogalma... 4.. Az irányítá... 4.. Vezérlé, zabályozá... 6.3. Önműödő zabályozáo elvi felépítée... 7.4. Zavarompenzáció... 8.5. Szabályozái
Mindennapjaink. A költő is munkára
 A munka zót okzor haználjuk, okféle jelentée van. Mi i lehet ezeknek az egymától nagyon különböző dolgoknak a közö lényege? É mi köze ezeknek a fizikához? A költő i munkára nevel 1.1. A munka az emberi
A munka zót okzor haználjuk, okféle jelentée van. Mi i lehet ezeknek az egymától nagyon különböző dolgoknak a közö lényege? É mi köze ezeknek a fizikához? A költő i munkára nevel 1.1. A munka az emberi
Praktikus tippek: Lambdaszondák ellenőrzése és cseréje
 A mi zaktudáunk: Az Ön hazna Mint a lambdazonda feltalálója é legnagyobb gyártója, a Boch jól látható többletet kínál a kerekedelem, a műhelyek é gépjármű-tulajdonook zámára a minőég é termékválazték tekintetében.
A mi zaktudáunk: Az Ön hazna Mint a lambdazonda feltalálója é legnagyobb gyártója, a Boch jól látható többletet kínál a kerekedelem, a műhelyek é gépjármű-tulajdonook zámára a minőég é termékválazték tekintetében.
13. MECHANIKA-MOZGÁSTAN GYAKORLAT (kidolgozta: Németh Imre óraadó tanár, Bojtár Gergely egyetemi ts., Szüle Veronika, egy. ts.
 SZÉCHEYI ISTVÁ EGYETEM LKLMZOTT MECHIK TSZÉK. MECHIK-MOZGÁST GYKOLT (kidolgozta: éeth Ire óraadó tanár, Bojtár Gergely egyetei t., Szüle Veronika, egy. t.) /. feladat: Szerkezetek kinetikája, járű odell
SZÉCHEYI ISTVÁ EGYETEM LKLMZOTT MECHIK TSZÉK. MECHIK-MOZGÁST GYKOLT (kidolgozta: éeth Ire óraadó tanár, Bojtár Gergely egyetei t., Szüle Veronika, egy. t.) /. feladat: Szerkezetek kinetikája, járű odell
A m becslése. A s becslése. A (tapasztalati) szórás. n m. A minta és a populáció kapcsolata. x i átlag
 szórás. n m. A minta és a populáció kapcsolata. x i átlag") 016.09.09. A m beclée A beclée = Az adatok átlago eltérée a m-től. (tapaztalat zórá) = az elemek átlago eltérée az átlagtól. átlag: az elemekhez képet középen kell elhelyezkedne. x x 0 x n x Q x x x 0
016.09.09. A m beclée A beclée = Az adatok átlago eltérée a m-től. (tapaztalat zórá) = az elemek átlago eltérée az átlagtól. átlag: az elemekhez képet középen kell elhelyezkedne. x x 0 x n x Q x x x 0
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Csak felvételi vizsga: csak záróvizsga: közös vizsga: Villamosmérnöki szak BME Villamosmérnöki és Informatikai Kar. 2011. május 31.
 Név, felvételi azonoító, Neptun-kód: VI pont(90) : Cak felvételi vizga: cak záróvizga: közö vizga: Közö alapképzée záróvizga meterképzé felvételi vizga Villamomérnöki zak BME Villamomérnöki é Informatikai
Név, felvételi azonoító, Neptun-kód: VI pont(90) : Cak felvételi vizga: cak záróvizga: közö vizga: Közö alapképzée záróvizga meterképzé felvételi vizga Villamomérnöki zak BME Villamomérnöki é Informatikai
FIZIKA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ
 Fizika emelt zint 08 É RETTSÉGI VIZSGA 0. október 7. FIZIKA EMELT SZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ NEMZETI ERŐFORRÁS MINISZTÉRIUM A dolgozatokat az útmutató utaítáai zerint,
Fizika emelt zint 08 É RETTSÉGI VIZSGA 0. október 7. FIZIKA EMELT SZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ NEMZETI ERŐFORRÁS MINISZTÉRIUM A dolgozatokat az útmutató utaítáai zerint,
1. Gépelemek minimum rajzjegyzék
 1. Gépelemek minimum rajzjegyzék Rajzi beugró ábrák válaztéka (Kovác Gáborné Mezei Gizella, Rácz Péter, Szalai Péter, Törőcik Dávid elektroniku jegyzetének zámozáa alapján) Kifáradára történő méretezé
1. Gépelemek minimum rajzjegyzék Rajzi beugró ábrák válaztéka (Kovác Gáborné Mezei Gizella, Rácz Péter, Szalai Péter, Törőcik Dávid elektroniku jegyzetének zámozáa alapján) Kifáradára történő méretezé
AquaProdukt USZODAI LÉGKEZELŐK PÁRÁTLANÍTÁS TÍPUS HÁZSZERKEZET
 k ő el z e gk é l ai U d o z AquaProdukt USZODAI LÉGKEZELŐK PÁRÁTLANÍTÁS Ahhoz, hogy az uzoda épületzerkezetét megóvjuk é a bent tartózkodó emberek jó komfortérzetét megteremtük az épületet fűteni, párátlanítani
k ő el z e gk é l ai U d o z AquaProdukt USZODAI LÉGKEZELŐK PÁRÁTLANÍTÁS Ahhoz, hogy az uzoda épületzerkezetét megóvjuk é a bent tartózkodó emberek jó komfortérzetét megteremtük az épületet fűteni, párátlanítani
A rögzített tengely körül forgó testek kiegyensúlyozottságáról kezdőknek
 A rögzített tengely körül forgó tetek kiegyenúlyozottágáról kezdőknek Bevezeté A faiparban nagyon ok forgó mozgát végző gépelem, zerzám haználato, melyek rende működéének feltétele azok kiegyenúlyozottága.
A rögzített tengely körül forgó tetek kiegyenúlyozottágáról kezdőknek Bevezeté A faiparban nagyon ok forgó mozgát végző gépelem, zerzám haználato, melyek rende működéének feltétele azok kiegyenúlyozottága.
A 2006/2007. tanévi Országos középiskolai Tanulmányi Verseny második fordulójának feladatai és azok megoldásai f i z i k á b ó l. I.
 006/007. tanévi Orzágo középikolai Tanulmányi Vereny máodik fordulójának feladatai é azok megoldáai f i z i k á b ó l I. kategória. feladat. Egy m maga 30 hajlázögű lejtő lapjának elő é máodik fele különböző
006/007. tanévi Orzágo középikolai Tanulmányi Vereny máodik fordulójának feladatai é azok megoldáai f i z i k á b ó l I. kategória. feladat. Egy m maga 30 hajlázögű lejtő lapjának elő é máodik fele különböző
Forgó mágneses tér létrehozása
 Forgó mágnee tér létrehozáa 3 f-ú tekercelé, pólupárok záma: p=1 A póluoztá: U X kivezetéekre i=i o egyenáram Az indukció kerület menti elozláa: U X kivezetéekre Im=Io amplitúdójú váltakozó áram Az indukció
Forgó mágnee tér létrehozáa 3 f-ú tekercelé, pólupárok záma: p=1 A póluoztá: U X kivezetéekre i=i o egyenáram Az indukció kerület menti elozláa: U X kivezetéekre Im=Io amplitúdójú váltakozó áram Az indukció
Családi állapottól függõ halandósági táblák Magyarországon
 Caládi állapottól függõ halandóági táblák Magyarorzágon A házaágok várható tartama, túlélée MÓDSZERTANI TANULMÁNY Központi Statiztikai Hivatal Hungarian Central Statitial Offie Központi Statiztikai Hivatal
Caládi állapottól függõ halandóági táblák Magyarorzágon A házaágok várható tartama, túlélée MÓDSZERTANI TANULMÁNY Központi Statiztikai Hivatal Hungarian Central Statitial Offie Központi Statiztikai Hivatal
A WEB SZERVER MEGHIBÁSODÁSÁNAK HATÁSA A PROXY CASH SZERVEREK HATÉKONYSÁGÁRA. Bérczes Tamás, Sztrik János Debreceni Egyetem, Informatikai Kar
 A WEB SZERVER MEGHIBÁSODÁSÁNAK HATÁSA A PROXY CASH SZERVEREK HATÉKONYSÁGÁRA PERFORMANCE EVALUATION OF PROXY CASH SERVERS WITH UNRELIABLE WEB SERVER Bércze Tamá, Sztrik Jáno Debreceni Egyetem, Informatikai
A WEB SZERVER MEGHIBÁSODÁSÁNAK HATÁSA A PROXY CASH SZERVEREK HATÉKONYSÁGÁRA PERFORMANCE EVALUATION OF PROXY CASH SERVERS WITH UNRELIABLE WEB SERVER Bércze Tamá, Sztrik Jáno Debreceni Egyetem, Informatikai
Matematika M1 1. zárthelyi megoldások, 2017 tavasz
 Matematika M. zárthelyi megoldáok, 07 tavaz A coport Pontozá: 0 + + 6 + 50 pont. Számíta ki az alábbi adatokhoz legkiebb négyzete értelemben legjobban illezkedő legfeljebb máodfokú polinomot! x i 3 0 y
Matematika M. zárthelyi megoldáok, 07 tavaz A coport Pontozá: 0 + + 6 + 50 pont. Számíta ki az alábbi adatokhoz legkiebb négyzete értelemben legjobban illezkedő legfeljebb máodfokú polinomot! x i 3 0 y
Számítógépes gyakorlat Irányítási rendszerek szintézise
 Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Azért jársz gyógyfürdőbe minden héten, Nagyapó, mert fáj a térded?
 3. Mekkora annak a játékautónak a tömege, melyet a 10 N m rugóállandójú rugóra akaztva, a rugó hozváltozáa 10 cm? 4. Mekkora a rugóállandója annak a lengécillapítónak, amely 500 N erő hatáára 2,5 cm-rel
3. Mekkora annak a játékautónak a tömege, melyet a 10 N m rugóállandójú rugóra akaztva, a rugó hozváltozáa 10 cm? 4. Mekkora a rugóállandója annak a lengécillapítónak, amely 500 N erő hatáára 2,5 cm-rel
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból
 Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
- IV.1 - mozgó süllyesztékfél. álló süllyesztékfél. 4.1 ábra. A süllyesztékes kovácsolás alapelve
 - IV.1 - ALAKÍTÁSTECHNIKA Előadájegyzet Pro Ziaja György IV.réz. TÉRFOGATALAKÍTÁS 4.1 SÜLLYESZTÉKES KOVÁCSOLÁS Az alkatrézgyártában alkalmazott képlékenyalakítái eljáráokat két ő coportra zoká oztani:
- IV.1 - ALAKÍTÁSTECHNIKA Előadájegyzet Pro Ziaja György IV.réz. TÉRFOGATALAKÍTÁS 4.1 SÜLLYESZTÉKES KOVÁCSOLÁS Az alkatrézgyártában alkalmazott képlékenyalakítái eljáráokat két ő coportra zoká oztani:
Maradékos osztás nagy számokkal
 Maradéko oztá nagy zámokkal Uray M. Jáno, 01 1 Bevezeté Célunk a nagy termézete zámokkal való zámolá. A nagy itt azt jelenti, hogy nagyobb, mint amivel a zámítógép közvetlenül zámolni tud. A termézete
Maradéko oztá nagy zámokkal Uray M. Jáno, 01 1 Bevezeté Célunk a nagy termézete zámokkal való zámolá. A nagy itt azt jelenti, hogy nagyobb, mint amivel a zámítógép közvetlenül zámolni tud. A termézete
TARTÓSZERKEZETEK II.-III.
 TRTÓSZERKEZETEK II.-III. VSBETOSZERKEZETEK 29.3.7. VSBETO KERESZTMETSZET YOMÁSI TEHERBÍRÁSÁK SZÁMÍTÁS kereztmetzet teherbíráa megelelı ha nyomott km. eetén: Rd hol a normálerı tervezéi értéke (mértékadó
TRTÓSZERKEZETEK II.-III. VSBETOSZERKEZETEK 29.3.7. VSBETO KERESZTMETSZET YOMÁSI TEHERBÍRÁSÁK SZÁMÍTÁS kereztmetzet teherbíráa megelelı ha nyomott km. eetén: Rd hol a normálerı tervezéi értéke (mértékadó
Diagnosztikai módszerek II. PET,MRI 2011.05.08. Diagnosztikai módszerek II. Annihiláció. Pozitron emissziós tomográfia (PET)
") 0.05.08. Diagnoztikai ódzerek II. Pozitron eizió toográfia (PT) Diagnoztikai ódzerek II. PT,MRI Kardo Roland 0 05.0 Mágnee agrezonancia képalkotá (MRI) -Strukturáli MRI (MRI) -Funkcionáli MRI (fmri) Pozitron
0.05.08. Diagnoztikai ódzerek II. Pozitron eizió toográfia (PT) Diagnoztikai ódzerek II. PT,MRI Kardo Roland 0 05.0 Mágnee agrezonancia képalkotá (MRI) -Strukturáli MRI (MRI) -Funkcionáli MRI (fmri) Pozitron
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki Kar Repülőgépek és hajók Tanszék
 Budapet Műzak é Gazdaágtudomány Egyetem Közlekedémérnök Kar Repülőgépek é hajók Tanzék Hő- é áramlátan II. 2008/2009 I. félév 1 Méré Hőugárzá é a vízznte cő hőátadáának vzgálata Jegyzőkönyvet kézítette:
Budapet Műzak é Gazdaágtudomány Egyetem Közlekedémérnök Kar Repülőgépek é hajók Tanzék Hő- é áramlátan II. 2008/2009 I. félév 1 Méré Hőugárzá é a vízznte cő hőátadáának vzgálata Jegyzőkönyvet kézítette:
1 CO (váltóérintkező) 1 CO (váltóérintkező) Tartós határáram / max. bekapcs. áram. 10 / 0,3 / 0,12 6 / 0,2 / 0,12 Legkisebb kapcsolható terhelés
 1 CO (váltóérintkező) Tartós határáram / max. bekapcs. áram. 10 / 0,3 / 0,12 6 / 0,2 / 0,12 Legkisebb kapcsolható terhelés") 70- - Felu gyeleti relék 6-8 - 10 A 70- gy- é háromfáziú hálózatok felu gyelete Válaztható felu gyeleti funkciók: fez. cökkené, fez. növekedé, fez. növekedé é -cökkené, fázikieé, fáziorrend, azimmetria
70- - Felu gyeleti relék 6-8 - 10 A 70- gy- é háromfáziú hálózatok felu gyelete Válaztható felu gyeleti funkciók: fez. cökkené, fez. növekedé, fez. növekedé é -cökkené, fázikieé, fáziorrend, azimmetria
Dr. Gyurcsek István. Példafeladatok. Helygörbék Bode-diagramok HELYGÖRBÉK, BODE-DIAGRAMOK DR. GYURCSEK ISTVÁN
 Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Mintapélda. Szivattyúperem furatának mérése tapintós furatmérővel. Megnevezés: Szivattyúperem Anyag: alumíniumötvözet
 Szivattyúperem fratának mérée tapintó fratmérővel A mnkadarab: A mérőezköz: Megnevezé: Szivattyúperem Fratmérő Anyag: almínimötvözet EV 0,5 1,5 m Spec.: 85 kj Lin 3 m (T = 35 m) Tapintó (DIN 897-1) Mérétartomány:
Szivattyúperem fratának mérée tapintó fratmérővel A mnkadarab: A mérőezköz: Megnevezé: Szivattyúperem Fratmérő Anyag: almínimötvözet EV 0,5 1,5 m Spec.: 85 kj Lin 3 m (T = 35 m) Tapintó (DIN 897-1) Mérétartomány:
Mérnökirodai szolgáltatásunk keretében további felvilágosítással, szakmai tanácsadással is állunk tisztelt ügyfeleink rendelkezésére.
 Tiztelt Ügyfelünk! A DIRECT-LINE Nemeacél Kft. egy olyan kiadványorozatot indít útjára, amelyben megkíérli özefoglalni azokat a legfontoabb imereteket, amelyek a rozdamente anyagok kerekedelme, gyártáa
Tiztelt Ügyfelünk! A DIRECT-LINE Nemeacél Kft. egy olyan kiadványorozatot indít útjára, amelyben megkíérli özefoglalni azokat a legfontoabb imereteket, amelyek a rozdamente anyagok kerekedelme, gyártáa
Hálózati Algoritmusok
 Hálózati Algoritmuok 05 GLS: Egy kálázható helymeghatározó zerviz Jinyang Li, John Jannotti, Dougla S. J. De Couto, David R. Karger, Robert Morri: A Scalable Location Service for Geographic Ad Hoc Routing,
Hálózati Algoritmuok 05 GLS: Egy kálázható helymeghatározó zerviz Jinyang Li, John Jannotti, Dougla S. J. De Couto, David R. Karger, Robert Morri: A Scalable Location Service for Geographic Ad Hoc Routing,
Gyengesavak disszociációs állandójának meghatározása potenciometriás titrálással
 Gyengeavak izociáció állanójának meghatározáa potenciometriá titráláal 1. Bevezeté a) A titrálái görbe egyenlete Egy egybáziú A gyengeavat titrálva NaO mérőolattal a titrálá bármely pontjában teljeül az
Gyengeavak izociáció állanójának meghatározáa potenciometriá titráláal 1. Bevezeté a) A titrálái görbe egyenlete Egy egybáziú A gyengeavat titrálva NaO mérőolattal a titrálá bármely pontjában teljeül az
IRÁNYÍTÁSTECHNIKAI ALAPOK. Erdei István Grundfos South East Europe Kft.
 IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ
 Fizika középzint Javítái-értékeléi útutató 06 ÉRETTSÉGI VIZSGA 006. noveber 6. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI ÉS KULTURÁLIS MINISZTÉRIUM Fizika középzint
Fizika középzint Javítái-értékeléi útutató 06 ÉRETTSÉGI VIZSGA 006. noveber 6. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI ÉS KULTURÁLIS MINISZTÉRIUM Fizika középzint
Villamos gépek tantárgy tételei
 1. tétel Imertee a nagy aznkron motorok közvetlen ndítáának következményet! Elemezze a közvetett ndítá módokat! Kalcká motorok ndítáa Közvetlen ndítá. Az álló motor közvetlen hálózatra kapcoláa a legegyzerűbb
1. tétel Imertee a nagy aznkron motorok közvetlen ndítáának következményet! Elemezze a közvetett ndítá módokat! Kalcká motorok ndítáa Közvetlen ndítá. Az álló motor közvetlen hálózatra kapcoláa a legegyzerűbb
1. MINTAFELADATSOR KÖZÉPSZINT JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ
 Oktatákutató é Fejleztő Intézet TÁMOP-3.1.1-11/1-01-0001 XXI. zázadi közoktatá (fejlezté, koordináció) II. zakaz FIZIKA 1. MINTAFELADATSOR KÖZÉPSZINT 015 JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ Oktatákutató é Fejleztő
Oktatákutató é Fejleztő Intézet TÁMOP-3.1.1-11/1-01-0001 XXI. zázadi közoktatá (fejlezté, koordináció) II. zakaz FIZIKA 1. MINTAFELADATSOR KÖZÉPSZINT 015 JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ Oktatákutató é Fejleztő
Aktív lengéscsillapítás. Másodfokú lengrendszer tesztelése.
 Aktív lgécillapítá. Máodfokú lgrdzr tztlé.. A gyakorlat célja Jármvk aktív lgé cillapítááak modllzé máodfokú lgrdzrkét. Szoftvrfjlzté a rdzr való idj tztléér, a tztrdméyk kiértéklé.. Elmélti bvzt. A máodfokú
Aktív lgécillapítá. Máodfokú lgrdzr tztlé.. A gyakorlat célja Jármvk aktív lgé cillapítááak modllzé máodfokú lgrdzrkét. Szoftvrfjlzté a rdzr való idj tztléér, a tztrdméyk kiértéklé.. Elmélti bvzt. A máodfokú
Proxy Cache Szerverek hatékonyságának vizsgálata The Performance of the Proxy Cache Server
 Proxy Cahe Szerverek hatékonyágának vizgálata The Performane of the Proxy Cahe Server Bérze Tamá, berzet@inf.unideb.hu IFSZ KFT, Debreen Péterfia u. Sztrik Jáno, ztrik.jano@inf.unideb.hu Debreeni Egyetem,
Proxy Cahe Szerverek hatékonyágának vizgálata The Performane of the Proxy Cahe Server Bérze Tamá, berzet@inf.unideb.hu IFSZ KFT, Debreen Péterfia u. Sztrik Jáno, ztrik.jano@inf.unideb.hu Debreeni Egyetem,
MŰSZAKI FIZIKA I. Dr. Iványi Miklósné professor emeritus. 5. Előadás
 MŰSZAK FZKA Dr. vány Mklóné profeor emert 5. Előadá PTE PMMK Műzak nformatka Tanzék Műzak Fzka-/EA-V/ Hálózatzámítá Fzka valóág modell Az objektm modellje a rendzer A rendzer megvalóítáa realzácója a hálózat
MŰSZAK FZKA Dr. vány Mklóné profeor emert 5. Előadá PTE PMMK Műzak nformatka Tanzék Műzak Fzka-/EA-V/ Hálózatzámítá Fzka valóág modell Az objektm modellje a rendzer A rendzer megvalóítáa realzácója a hálózat
ELLENŐRZŐ KÉRDÉSEK LENGÉSTANBÓL: A rugóállandó a rugómerevség reciproka. (Egyik végén befogott tartóra: , a rugómerevség mértékegysége:
 ELLENŐRZŐ ÉRDÉSE LENGÉSNBÓL: Átaáno kérdéek: Mik a engőrendzer eemei?: engőrendzer eemei: a tömeg(ek), a rugó(k), ietve a ciapítá(ok). Mi a rugóáandó?: rugóáandó a rugó egyégnyi terheé aatti aakvátozáát
ELLENŐRZŐ ÉRDÉSE LENGÉSNBÓL: Átaáno kérdéek: Mik a engőrendzer eemei?: engőrendzer eemei: a tömeg(ek), a rugó(k), ietve a ciapítá(ok). Mi a rugóáandó?: rugóáandó a rugó egyégnyi terheé aatti aakvátozáát
Irányítástechnika 2. 1. Elıadás
 Irányítástechnika 2 1. Elıadás Az irányítástechnika felosztása. Szabályozás, vezérlés összehasonlítása. Jel, szerv, tag, hatásvázlat, mőködési vázlat Irodalom - Petz Ernı: Bevezetı irányítástechnikai alapismeretek,
Irányítástechnika 2 1. Elıadás Az irányítástechnika felosztása. Szabályozás, vezérlés összehasonlítása. Jel, szerv, tag, hatásvázlat, mőködési vázlat Irodalom - Petz Ernı: Bevezetı irányítástechnikai alapismeretek,
Széchenyi István Egyetem MTK Szerkezetépítési és Geotechnikai Tanszék Tartók statikája I. Dr. Papp Ferenc RÚDAK CSAVARÁSA
 Széchenyi Itván Egyetem MTK Szerkezetépítéi é Geotechnikai Tanzék Tartók tatikája I. 1. Prizmatiku rúdelem cavaráa r. Papp Ferenc RÚAK CSAVARÁSA Egyene tengelyű é állandó kereztmetzetű (prizmatiku) rúdelem
Széchenyi Itván Egyetem MTK Szerkezetépítéi é Geotechnikai Tanzék Tartók tatikája I. 1. Prizmatiku rúdelem cavaráa r. Papp Ferenc RÚAK CSAVARÁSA Egyene tengelyű é állandó kereztmetzetű (prizmatiku) rúdelem
Egyenáramú motor kaszkád szabályozása
 Egyeáramú motor kazkád zabályozáa. gyakorlat élja z egyeáramú motor modellje alajá kazkád zabályozó terezée. zabályozá kör feléítée Smulk köryezetbe. zmuláó eredméyek feldolgozáa.. Elmélet beezet a az
Egyeáramú motor kazkád zabályozáa. gyakorlat élja z egyeáramú motor modellje alajá kazkád zabályozó terezée. zabályozá kör feléítée Smulk köryezetbe. zmuláó eredméyek feldolgozáa.. Elmélet beezet a az
Proxy Cache szerverek hatékonyság vizsgálata
 Proxy Cahe zerverek hatékonyág vizgálata Performane Evaluation of Proxy Cahe Server Bérze Tamá, berze.tama@ifz.hu IFSZ KFT, Debreen Péterfia u. Sztrik Jáno, jztrik@inf.unideb.hu Debreeni Egyetem, Informatikai
Proxy Cahe zerverek hatékonyág vizgálata Performane Evaluation of Proxy Cahe Server Bérze Tamá, berze.tama@ifz.hu IFSZ KFT, Debreen Péterfia u. Sztrik Jáno, jztrik@inf.unideb.hu Debreeni Egyetem, Informatikai
A SZOJKA III PILÓTA NÉLKÜLI REPÜLŐGÉP REPÜ LÉSSZABÁLYOZÓ RENDSZER ZAVARELHÁRÍTÁSÁNAK VIZSGÁLATA II.
 HADTUDOMÁNY SZEGEDI PÉTER A SZOJKAIII PILÓTA NÉLKÜLI REPÜLŐGÉP REPÜ LÉSSZABÁLYOZÓ RENDSZER ZAVARELHÁRÍTÁSÁNAK VIZSGÁLATA II. A repüléabáloó renderekkel emben támatott alapvető követelmén, hog minimálja
HADTUDOMÁNY SZEGEDI PÉTER A SZOJKAIII PILÓTA NÉLKÜLI REPÜLŐGÉP REPÜ LÉSSZABÁLYOZÓ RENDSZER ZAVARELHÁRÍTÁSÁNAK VIZSGÁLATA II. A repüléabáloó renderekkel emben támatott alapvető követelmén, hog minimálja
FPC-500 hagyományos tűzjelző központ
 Tűzjelző rendzerek FPC-500 hagyományo tűzjelző központ FPC-500 hagyományo tűzjelző központ www.bochecrity.h Maga minőégű modern megjelené alkalma a közforgalmú területekre Szövege LCD kijelző Kapható 2,
Tűzjelző rendzerek FPC-500 hagyományo tűzjelző központ FPC-500 hagyományo tűzjelző központ www.bochecrity.h Maga minőégű modern megjelené alkalma a közforgalmú területekre Szövege LCD kijelző Kapható 2,
A 32. Mikola Sándor Fizikaverseny feladatainak megoldása Döntı - Gimnázium 10. osztály Pécs 2013. 1 pont
 A Mikola Sándor Fizikavereny feladatainak egoldáa Döntı - Gináziu oztály Péc feladat: a) Az elı eetben a koci é a ágne azono a lauláát a dinaika alaegyenlete felhaználáával záolhatjuk: Ma Dy Dy a 6 M ont
A Mikola Sándor Fizikavereny feladatainak egoldáa Döntı - Gináziu oztály Péc feladat: a) Az elı eetben a koci é a ágne azono a lauláát a dinaika alaegyenlete felhaználáával záolhatjuk: Ma Dy Dy a 6 M ont
HARDVEREK VILLAMOSSÁGTANI ALAPJAI
 HADVEEK VAMOSSÁGTAN AAPJA Dr. vány Mklóné Profeor Emert 5. Előadá PTE PMMK Műzak nformatka Tanzék Hardverek Vllamoágtan Alapja/EA-V/ Hálózatzámítá Fzka valóág modell Az objektm modellje a rendzer A rendzer
HADVEEK VAMOSSÁGTAN AAPJA Dr. vány Mklóné Profeor Emert 5. Előadá PTE PMMK Műzak nformatka Tanzék Hardverek Vllamoágtan Alapja/EA-V/ Hálózatzámítá Fzka valóág modell Az objektm modellje a rendzer A rendzer
1. forduló (2010. február 16. 14 17
 9. MIKOLA SÁNDOR ORSZÁGOS TEHETSÉGKUTATÓ FIZIKAVERSENY 9. frduló (. február 6. 4 7 a. A KITŰZÖTT FELADATOK: Figyele! A verenyen inden egédezköz (könyv, füzet, táblázatk, zálógép) haználható, é inden feladat
9. MIKOLA SÁNDOR ORSZÁGOS TEHETSÉGKUTATÓ FIZIKAVERSENY 9. frduló (. február 6. 4 7 a. A KITŰZÖTT FELADATOK: Figyele! A verenyen inden egédezköz (könyv, füzet, táblázatk, zálógép) haználható, é inden feladat
Jó teljesítmény... évekre szóló befektetés
 motoro é LPG meghajtáú ellenúlyo targonák 4 Pneumatiku gumiabronok 4.0 5.5 tonna Jó teljeítmény... évekre zóló befekteté A 4 é 5 t teherbíráú, belő égéű motoro targonák maga hatékonyága é legendá megbízhatóága
motoro é LPG meghajtáú ellenúlyo targonák 4 Pneumatiku gumiabronok 4.0 5.5 tonna Jó teljeítmény... évekre zóló befekteté A 4 é 5 t teherbíráú, belő égéű motoro targonák maga hatékonyága é legendá megbízhatóága
FELÜLETI HŐMÉRSÉKLETMÉRŐ ÉRZÉKELŐK KALIBRÁLÁSA A FELÜLET DŐLÉSSZÖGÉNEK FÜGGVÉNYÉBEN
 FELÜLETI HŐMÉRSÉKLETMÉRŐ ÉRZÉKELŐK KALIBRÁLÁSA A FELÜLET DŐLÉSSZÖGÉNEK FÜGGVÉNYÉBEN Andrá Emee* Kivonat Az OMH kifejleztett egy berendezét a kontakt, felületi hőméréklet érzékelők kalibráláára é a méréi
FELÜLETI HŐMÉRSÉKLETMÉRŐ ÉRZÉKELŐK KALIBRÁLÁSA A FELÜLET DŐLÉSSZÖGÉNEK FÜGGVÉNYÉBEN Andrá Emee* Kivonat Az OMH kifejleztett egy berendezét a kontakt, felületi hőméréklet érzékelők kalibráláára é a méréi
Tartalom. Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra
 Tartalom Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra 2015 1 Robusztus stabilitás Szabályozási rendszer tervezésének gyakorlati problémája az, hogy az aktuális rendszer G(s) átviteli
Tartalom Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra 2015 1 Robusztus stabilitás Szabályozási rendszer tervezésének gyakorlati problémája az, hogy az aktuális rendszer G(s) átviteli
6. gyakorlat Követelmények elemzése, felderítő adatelemzés Megoldások
 Rendzermodellezé (BMEVIMIAA00), 0. tavazi félév. gyakorlat Követelmények elemzée, felderítő adatelemzé ok. Szerverteljeítmény felderítő adatelemzée Egy zerveren az alábbi teljeítményjellemzőket mértük:
Rendzermodellezé (BMEVIMIAA00), 0. tavazi félév. gyakorlat Követelmények elemzée, felderítő adatelemzé ok. Szerverteljeítmény felderítő adatelemzée Egy zerveren az alábbi teljeítményjellemzőket mértük: