Szabályozás Irányítástechnika PE MIK MI BSc 1
|
|
|
- Márta Magyar
- 8 évvel ezelőtt
- Látták:
Átírás

1 Szabályozás Irányítástechnika PE MIK MI BSc 1

")

2 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték y(s) kimenő változó / irányított kimenet G(s) irányított rendszer átviteli fv.-e Szabályozás/2
3 Nyílt hatásláncú rendszerek vezérlés hatáslánca anyag energia információ vezérlő berendezés beavatkozó szerv technológiai folyamat + zavarás érzékelő Szabályozás/3
4 Nyílt hatásláncú rendszerek Vezérlő rendszer leírása ( s) G( s) w( s) y = azaz az irányított kimenetet a bemenet értéke és az irányító rendszer tulajdonságai határozzák meg be nem tervezett zavarásokra, illetve a saját paramétereinek változásaira az irányító rendszer nem tud reagálni, azaz a rendszer csak a tervezési körülmények mellett működik megfelelően Szabályozás/4
5 Nyílt hatásláncú rendszerek vezérlés zavaró jellemző irányított jellemző néhány, előreismert zavarás kompenzálása ha nincs ismeretlen zavarás, akkor mindig az előírt értéken irányítási szervek pontosan ismerni kell minden elemet működési sajátosságok mindig stabil Szabályozás/5
6 Visszacsatolt rendszerek az irányító rendszer folyamatosan ellenőrzi a szabályzott kimenetet szabályzó rendszerek: ahol w(t) bemenő változó / előírt érték e(t) a hiba jel / szabályzási eltérés G c (s) szabályzó átviteli függvénye u(t) a beavatkozó jel G p (s) szabályzott szakasz átviteli fv.-e y(t) kimenő változó / szabályzott kimenet Szabályozás/6
7 Visszacsatolt rendszerek szabályozás hatáslánca G c (s) szabályzó berendezés beavatkozó jel beavatkozó szerv G p (s) módosított jellemző technológiai folyamat anyag energia információ + zavarás hiba jel előírt érték alapjel + - ellenőrző jel érzékelő szabályzott jellemző H(s) = 1 Szabályozás/7
8 Visszacsatolt rendszerek A visszacsatolt rendszer eredő átviteli függvénye y( s) G ( ) c s Gp s Ge s = = w( s) 1+ Gc s Gp a kimenet meghatározása: azaz a kimenet itt is a bemenet értékétől és az irányított rendszer tulajdonságaitól függ, de a G(s)-beli zavarások hatása a nyitott rendszerhez képest kisebb, illetve G(s) alkalmas megválasztásával eltüntethető y ( s) G = 1+ G ( s) ( s) ( ) ( ) ( ) ( s) G = 1+ ( ) = G ( s) w( s) w s e ( s) G( s) Szabályozás/8
9 Visszacsatolt rendszerek visszacsatolt ágban megjelenhet az érzékelőt leíró tag: ekkor az eredő átviteli függvény: G e ( s) = y ( s) ( ) w s G = 1± G ( s) ( s) H ( s) Szabályozás/9
10 Visszacsatolt rendszerek a visszacsatolás hatására a rendszer elvileg kompenzálja a zavarásokból, paraméterváltozásokból fellépő eltérést, de a rendszer eredő erősítése csökken, 1-nél kisebb lesz állandósult állapotbeli hiba az egyes tagok késleltető hatása miatt, az információ késleltetve jut a rendszer tudomására, és így nem megfelelő a beavatkozás, ami instabilitáshoz vezethet Szabályozás/10
11 Visszacsatolt rendszerek szabályozás zavaró jellemző minden zavarás kompenzálása irányított jellemző van eltérés, ez működteti a rendszert irányítási szervek nem kell a pontos ismeret működési sajátosságok lehet instabil (labilis) is Szabályozás/11
12 Állandósult állapotbeli hiba a visszacsatolás alapvető célja a tényleges kimenet és az előírt kimenet közötti eltérés minimalizálása legyen a szabályzó kör a következő: a szabályzási eltérés: e ( t) = w( t) y( t) Szabályozás/12
13 Állandósult állapotbeli hiba az állandósult állapotbeli hiba: a szabályzó kör felépítése alapján e azaz e ss = lim e ( t) = lim s e( s) t s 0 ( s) = w( s) y( s) = w( s) G( s) e( s) e ss ( ) ( ) s s w s = lim s 0 1+ G tehát a hibát mind a bemenő jel, mind a rendszer típusa befolyásolja e ( s) w s = 1+ G ( ) ( s) Szabályozás/13
14 Állandósult állapotbeli hiba legyen a bemenet k amplitúdójú ugrásfüggvény: ekkor a hiba e ss ( t) = k ( t) w 1 k = lim s 0 1+ G ( s) ( s) w = k = 1+ lim G s 0 ahol K p az arányos hiba koefficiens vagy arányos hibaállandó: K p = k e e ss k s ( s) ss k = 1+ K p Szabályozás/14
15 Állandósult állapotbeli hiba ahhoz, hogy a hiba nulla legyen: K = ehhez az kell, hogy a G(s) nevezőjében legyen egy s tag szorzóként, azaz kell egy integrátor tag ha nincs, akkor adott megengedett eltéréshez meghatározható a K p érték ez, mint erősítés jelentkezik a visszacsatolt körben hiba: offszet p lim G s 0 ( s) = Szabályozás/15
16 Állandósult állapotbeli hiba legyen a bemenet sebességugrás függvény: w ekkor a hiba e ss ( t) = k' t k' = lim s 0 s + sg ( s) = ( s) 2 w = ahol K v a sebességi hiba koefficiens vagy sebességi hiba: v lim sg s 0 K = k k' e ss ( s) k' s = k K v Szabályozás/16
17 Állandósult állapotbeli hiba ténylegesen ez nem a sebességhez kapcsolódó hiba, hanem beállítási hiba, ami a sebességugrás bemenetből következik K v mértékegysége: (másodperc) -1 ahhoz, hogy az e ss hiba nulla legyen K v -nak végtelennek kell lennie, ehhez egy s 2 tag kell G(s) nevezőjébe egyébként adott megengedett hibához meghatározható a K v értéke Szabályozás/17
18 Állandósult állapotbeli hiba ha a bemenet gyorsulás függvény: w ekkor a hiba e = lim ( t) = k" t 2 / 2 k" ( s) 3 w = ahol K a a gyorsulási hiba koefficiens vagy gyorsulási hiba mértékegysége: (másodperc) -2 k" 0 2 s + s G( s) 2 lim s G ( s ) ss s 2 = s 0 k" s = k" K a Szabályozás/18
19 Állandósult állapotbeli hiba a három eset alapján megállapítható, hogy az állandósult állapotbeli hiba léte attól függ, hogy milyen α hatványú s tag szerepel a felnyitott kör átviteli függvényének nevezőjében: G ( s) = K s α ( s z ) ( ) 1 K s zm ( s p ) K ( s p ) 1 n a rendszereket α értéke alapján szokás 0-, 1-, 2- típusúnak nevezni, ami megfelel egyben az origóba eső pólusok számának is Szabályozás/19
20 Állandósult állapotbeli hiba állandósult állapotbeli hiba, ha a bemenet Rendszer típusa ugrás sebességugrás gyorsulás 0 típus véges végtelen végtelen 1 típus 0 véges végtelen 2 típus 0 0 véges Szabályozás/20
21 Szabályzók Összefoglalva: arányos tag segítségével gyorsíthatjuk a rendszer működését, de az állandósult állapotbeli hiba nem tüntethető el integráló tag segítségével maradéktalanul eltüntethető az állandósult állapotbeli hiba, de a lengésre való hajlam erősödik általában elegendő, ha az ugrás jel esetén nincs állandósult állapotbeli hiba cél: egy gyors, de lengésre nem hajlamos rendszer kialakítása megfelelő szabályzó Szabályozás/21
22 Arányos tag bemenet a hibajel, kimenete pedig ennek az erősítéssel szorzott értéke: hatására gyorsabb lesz a rendszer működése visszacsatolásban csökken az állandósult állapotbeli hiba növekszik a lengésre való hajlam Szabályozás/22
 Ke( t)")
 =")
 K G")
23 Arányos tag I/O modell: ( t) Ke( t) u = átviteli függvény: G ( s) = K frekvencia függvény: ( jω) K G = Szabályozás/23
24 Integráló tag bemenet a hibajel, kimenete pedig ennek az integrálja hatására a visszacsatolt körben eltűnik a maradó hiba, de még jobban növekszik a lengésre való hajlam: a felnyitott körnek pólusa lesz az origóban a visszacsatolt körben növekszik a nevező fokszáma Szabályozás/24
 = s G I ( jω) = I 1 jω")
25 Integráló tag I/O modell: átviteli függvény: ( t) ( ) frekvencia függvény: u 1 = e τ dτ I 1 G( s) = s G I ( jω) = I 1 jω Szabályozás/25
26 Deriváló tag lengési hajlam csökkentése: deriváló tag beépítése bemenete a hibajel, kimenet a hibajel deriváltja D-tag hatása ha a hibajel állandó értékű, akkor a deriváló tag nem csinál semmit ha a hibajel nem nulla, akkor megelőző hatást fejt ki: megakadályozza a nagy túl- és alálendüléseket Szabályozás/26
 = s D frekvencia függvény: G ( jω) = jω D")
27 Deriváló tag I/O modell: u ( t) = D de( t) dt átviteli függvény: G ( s) = s D frekvencia függvény: G ( jω) = jω D Szabályozás/27
28 Deriváló tag ha a hibajel növekszik, akkor a derivált és a jel előjele megegyezik, és a deriváló tag növeli a szabályzó jelét, sietteti a túllendülés bekövetkeztét Szabályozás/28
29 Deriváló tag ha a hibajel csökken, akkor a derivált és a jel előjele különbözik csökkenti a szabályzó kimenetét, lassítja a működést, kisebb lesz a túllendülés Szabályozás/29
30 PI-tag Arányos és integráló tagok párhuzamosan kapcsolva G P (s) e(s) + u(s) G I (s) + gyakorlati megvalósítás: 1 e(s) + 1 I s + K u(s) Szabályozás/30
31 Szabályozás/31 PI-tag I/O modell: átviteli függvény: frekvencia függvény: ( ) ( ) ( ) + = t I d e t e K t u 0 1 τ τ ( ) s s K s K G s I I I = + = ( ) ω ω ω ω j j K j K j G I I I = + =
32 PI-tag átmeneti függvény Szabályozás/32

33 PI-tag súlyfüggvény: sebesség-válaszfüggvény: Szabályozás/33
 = K jω + I 1 I jω 1/ I")
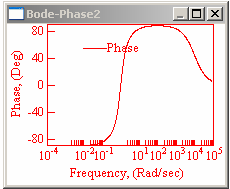
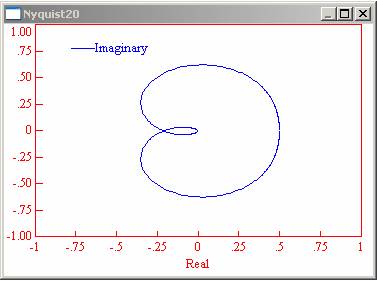
34 PI-tag Nyquist-diagram G ( jω) = K + I K jω K Bode diagram G( jω) = K jω + I 1 I jω 1/ I Szabályozás/34
35 PD-tag Arányos és deriváló tagok párhuzamosan kapcsolva I/O modell: átviteli függvény: u G ( t) = K e( t) + d ( s) = K( 1+ s) D de ( t) dt frekvencia függvény: G ( jω) = K( 1+ jω) D Szabályozás/35
36 PD-tag átmeneti függvény Szabályozás/36


37 PD-tag súlyfüggvény sebességugrás válaszfüggvény Szabályozás/37


 = arctg ω D 2")
38 PD-tag Nyquist-diagram Bode-diagram 2 D 20lg 1+ jω = 20lg 1+ ω ϕ D ( ω) = arctg ω D 2 Szabályozás/38
39 PID-tag ideális Arányos, integráló és deriváló tagok párhuzamos kapcsolása I/O modell: t 1 de u( t) = K e( t) + e( τ ) dτ + D I dt 0 ( t) Szabályozás/39
40 Szabályozás/40 PID-tag ideális átviteli függvény frekvenciafüggvény ahol ( ) + + = s s K s G D I 1 1 ( ) + + = ω ω ω j j K j G D I 1 1 ( ) = + + = ω ω ω j j j K I D I I 2 1 ( ) ( ) = ω ξ ω ω j j j K I D I D I 2 1 = = ξ

41 PID-tag ideális átmeneti függvény súlyfüggvény Szabályozás/41


42 PID-tag ideális sebességugrás válaszfüggvény Szabályozás/42


43 PID-tag ideális Nyquist-diagram Bode-diagram Szabályozás/43
44 PID-tag megvalósítható fizikailag megvalósítható PID-tagnál az ideális D- tag helyett egytárlós deriváló tagot alkalmazunk: Szabályozás/44
45 Szabályozás/45 PID-tag megvalósítható átviteli függvénye: ahol A az alsó F a felső törési körfrekvenciához tartozó időállandó: ( ) = s s s K G s K ' D I ( ) ( ) ( ) = = s s s s K K I K I K ' D I ( )( ) ( )s s s s K K I F A = K I F A + = + ( ) K ' D I F A + =
46 PID-tag megvalósítható átmeneti függvénye: Szabályozás/46

47 PID-tag megvalósítható súlyfüggvénye: Szabályozás/47
 + + + = 1 1 1 s s s K s G K ' D I példában: I = 10.5, K = 0.5, A = 9.885, F = 1.115")
48 Szabályozás/48 PID-tag megvalósítható Bode-diagramja 1/ A 1/ F 1/ K 1/ K 1/ I ( )( ) ( )s s s s K K I F A = ( ) = s s s K s G K ' D I példában: I = 10.5, K = 0.5, A = 9.885, F = 1.115
49 Reális PI-tag Fáziskésleltető tag PI-tag gyakorlati megvalósítása elektronikai elemekkel feltesszük, hogy a tag üresjáratban dolgozik, azaz a kimenete terheletlen Szabályozás/49
50 Reális PI-tag Fáziskésleltető tag átviteli függvény G FK ( s) = U U K B ( s) 1+ SK s = ( s) 1+ s KK ahol késleltető tag = R C = SK KK = Q Q Q 1 ( R ) H + RQ CQ = Q ρ siettetési időállandója késleltetési időállandója KK > SK ρ = R Q R + Q R H ellenállásviszony Szabályozás/50
51 Reális PI-tag Fáziskésleltető tag átmeneti függvény PI-tag PI-tag FK-tag FK-tag Szabályozás/51
52 Reális PI-tag Fáziskésleltető tag súlyfüggvény FK-tag PI-tag sebességugrás válasz PI-tag FK-tag Szabályozás/52
")

53 Reális PI-tag Fáziskésleltető tag Nyquist-diagram G FK ( jω) 1+ = 1 + SK KK Bode-diagram jω jω SK / KK 1/ KK 1/ SK Szabályozás/53
54 Reális PD-tag Fázissiettető tag PD-tag gyakorlati megvalósítása elektronikai elemekkel C H R H U B R Q U K a tag csak elektronikus erősítő elé iktatható be, mert árammal nem terhelhető Szabályozás/54
55 Reális PD-tag Fázissiettető tag átviteli függvény G FK ( s) = U U K B ( s) 1+ SS s = AFS ( s) 1+ s KS ahol siettető tag = R C = KS SS H H H Q H RH RQ = CH = ρ R + R A FS RQ = = ρ < 1 R + R Q H Q siettetési időállandója késleltetési időállandója SS > KS átviteli tényező, erősítés Szabályozás/55
56 Reális PD-tag Fázissiettető tag átmeneti függvény FS-tag FS-tag P-tag P-tag Szabályozás/56

57 Reális PD-tag Fázissiettető tag súlyfüggvény sebességugrás válasz FS-tag P-tag Szabályozás/57

 = A FS 1+ 1+ SS")

58 Reális PD-tag Fázissiettető tag Nyquist-diagram G FK ( jω) = A FS SS KS jω jω SS / KS Bode-diagram 1/ SS 1/ KS Szabályozás/58
59 Reális PID-tag Fáziskésleltető-siettető tag Fáziskésleltető-siettető (FKS) kapcsolás megvalósítása elektronikai elemekkel: C H R H C Q U B U K R Q Szabályozás/59
60 Reális PID-tag Fáziskésleltető-siettető tag átviteli függvény G FKS ( s) = U U K B ( s) ( s) = Q H s ( 1+ s)( 1+ s) 2 + Q ( + + ) s + 1 Q QH H H ahol = R C Q = RQCQ HQ = RH CQ H H H bevezetve a következő időállandókat: SA = SA SF SF Q Q H + = + H KA = KA KF KF Q Q + = + + H HQ H Szabályozás/60
61 Reális PID-tag Fáziskésleltető-siettető tag így az FKS-tag átviteli függvénye ahol G FKS ( s) = SA és KA az alsó törési körfrekvenciához tartozó siettetési és késleltetési időállandó SF és KF a felső törési körfrekvenciához tartozó siettetési és késleltetési időállandó KF < SF < SA < KA SA SF = KA KF ( SAs + 1)( SF s + 1) ( s + 1)( s + 1) KA KF Szabályozás/61
62 Reális PID-tag Fáziskésleltető-siettető tag átmeneti függvény rpid-tag FKS-tag Szabályozás/62
63 Reális PID-tag Fáziskésleltető-siettető tag súlyfüggvény végállapotok rpid-tag FKS-tag indulási időtartomány rpid-tag FKS-tag Szabályozás/63


64 Reális PID-tag Fáziskésleltető-siettető tag frekvenciatartomány Nyquist-diagram ω ω = 0 Bode-diagram 1/ KA 1/ SA 1/ SF 1/ KF Szabályozás/64
65 Példa Legyen a szabályozandó objektum átviteli függvénye a következő: G O ( s) = s s + 1 megállapítható, hogy az objektum erősítése 1 további paramétereinek megállapításához bontsuk fel s G O ( s) = s s s + 1 = 1 ( )( 2 s + 1 s s + 1) Szabályozás/65
66 Példa azaz a szabályozandó objektum felfogható egy elsőrendű (τ = 1) és egy másodrendű (ω = 1, ξ = 0.8) tag sorba kapcsolt eredőjeként pólusai: p 1 =-1 p 2,3 =-0.8± j0.6 G o ( s) = 1 ( )( 2 s + 1 s s + 1) Szabályozás/66

67 Példa átmeneti függvénye Szabályozás/67

68 Példa Az objektum frekvenciafüggvényei: Nyquist-diagram Szabályozás/68
69 Példa Bode-diagram 1/τ 1/ Szabályozás/69

70 Példa gyökhelygörbe Szabályozás/70
71 Példa csatoljuk vissza negatívan az objektumot ekkor az átviteli függvénye G e ( s) = G felbontva ( s) 1 = ( ) 3 s s s s + 2 O 2 1+ GO 1 1 G e ( s) = 3 2 s s s ( )( 2 s s s ) azaz K = 0.5, τ = 0.56, = 0.92, ξ = 0.46 Szabályozás/71
72 Példa átmeneti függvény nyílt zárt Szabályozás/72

73 Példa (frekvenciafüggvény!!!) Nyquist-diagram Bode-diagram Szabályozás/73
74 Példa szabályzás P-szabályzóval Szabályzás P-szabályzóval maradó szabályzási hiba mindig van maximális erősítés 5.5 a szakasz gyökhelygörbéje alapján növekvő erősítés gyorsabb felfutás növekvő lengés Szabályozás/74
75 Példa szabályzás P-szabályzóval átmeneti függvény K=5 K=1.5 Szabályozás/75



76 Példa szabályzás P-szabályzóval Bode diagram K=1 K=5 Szabályozás/76
77 Példa szabályzás PI-szabályzóval Szabályzás PI-szabályzóval P-tag csökkenti a maradó szabályzási hibát, de növeli a lengési hajlamot I-tag megszünteti a maradó szabályozási hibát, de kis integrálási időállandó esetén erősen növelheti a lengési hajlamot nagy integrálási időállandó viszont csökkenti a lengést, de (jelentősen) növelheti a beállási időt Szabályozás/77
78 Példa szabályzás PI-szabályzóval átmeneti függvény PI szabályzóval PI-szabályzóval I-tag kimenete P-szabályzóval Szabályozás/78
79 Példa szabályzás PI-szabályzóval átmeneti függvény PI szabályzóval ( I =10, K=2) PI-szabályzóval csak P-szabályzóval I-tag kimenete Szabályozás/79
80 Példa szabályzás PI-szabályzóval átmeneti függvény PI szabályzóval ( I =2, K=2) PI-szabályzóval csak P-szabályzóval I-tag kimenete Szabályozás/80

 = 4 3 2 10s + 26s +")
81 Példa szabályzás PI-szabályzóval Nyquist-diagram 20s + 2 G e ( s) = s + 26s + 26s + 10s Szabályozás/81


82 Példa szabályzás PI-szabályzóval Bode-diagram G e 1 ( s) = ( 20s + 2) 10s s s s + 1 Szabályozás/82
83 Példa szabályzás PI-szabályzóval gyökhelygörbe Szabályozás/83
84 Példa szabályzás PD-szabályzóval Szabályzás PD-szabályzóval P-tag csökkenti a maradó szabályzási hibát, gyorsítja a működést, de ugyanakkor növeli a lengési hajlamot D-tag csökkenti a lengési hajlamot és gyorsítja a rendszer működését Szabályozás/84
85 Példa szabályzás PD-szabályzóval átmeneti függvény PD szabályzóval P-szab. PD-szab. D-tag Szabályozás/85
86 Példa szabályzás PD-szabályzóval átmeneti függvény PD-szabályzóval csak P-szabályzóval PD-szabályzóval D-tag kimenete Szabályozás/86


87 Példa szabályzás PD-szabályzóval frekvenciafüggvények Nyquist-diagram G e ( s) = 0. 01s s 5. 01s s s + 1 Szabályozás/87


88 Példa szabályzás PD-szabályzóval Bode-diagram G e 1 ( s) = ( 5. 01s + 1) 0. 01s + 1 s s s + 1 Szabályozás/88

89 Példa szabályzás PD-szabályzóval gyökhelygörbe Szabályozás/89
90 Példa szabályzás PID-szabályzóval Szabályzás PID-szabályzóval P-tag csökkenti a maradó szabályzási hibát, gyorsítja a működést, de növeli a lengési hajlamot I-tag megszünteti a maradó szabályozási hibát, nagy integrálási időállandó esetén csökkenti a lengést, de (jelentősen) növelheti a beállási időt D-tag csökkenti a lengési hajlamot és gyorsítja a rendszer működését Szabályozás/90
91 Példa szabályzás PID-szabályzóval átmeneti függvény szabályzott kimenet I-tag kimenete D-tag kimenete Szabályozás/91
92 Példa szabályzás PID-szabályzóval frekvencia és gyökhelygörbe vizsgálatok Szabályozás/92


93 Példa szabályzás PID-szabályzóval Nyquist-diagram s s G e ( s) = s s s s + 2s Szabályozás/93
 ( 2 s = 3. 5 1.")

94 Példa szabályzás PID-szabályzóval Bode-diagram G e ( ) ( 2 s = s s + 1) 1 1 s 0. 02s + 2 s s s + 1 Szabályozás/94
95 Példa szabályzás PID-szabályzóval gyökhelygörbe Szabályozás/95
96 PID-szabályzó beállítása Ziegler-Nichols szabály K I D P K 0.5K kr 0 PI K 0.45K kr I 0.8 kr 0 PID K 0.6K kr I 0.5 kr D kr Szabályozás/96
97 Zavarkompenzáció cél: a zavaró jellemzőnek a szabályzott jellemzőre gyakorolt hatásának csökkentése megoldás: szabályzó rendszer kiegészítése vezérlő körrel a legnagyobb mértékű zavarást jelentő jellemzőt bevonjuk a szabályozásba ehhez mérjük ezt a jellemzőt is, és a jelet szuperponáljuk például a végrehajtó jelre Szabályozás/97
98 Zavarkompenzáció G c (s) w(s) q v1 q v2 y(s) c 1 c 2 A c Szabályozás/98
99 Arányszabályzás cél: két mennyiség arányának állandó értéken tartása megoldás: mindkét mennyiséget mérjük az arányt a szorzó tényezővel állítjuk be ez a jel lesz a szabályzó alapjele a pontos beállításhoz I-tag is kell Szabályozás/99
100 Arányszabályzás q v2 qv1 Szabályozás/100
101 Kaszkádszabályzás cél: a szabályzott jellemző előírt értéken történő tartása különböző időbeli lefutású zavarások mellett megoldás: két, egymásra épülő szabályzó kör kialakítása alsó szintű kör: a gyors lefolyású zavarás gyors kompenzálása, nem kell tökéletes beállítás felső szintű kör: a lassabb zavarások pontos kompenzálása (I-tag is kell) Szabályozás/101
102 Kaszkádszabályzás q v2 c 2 y 1 (s) Q G c1 (s) u 1 (s) q v1 c 1 c Szabályozás/102
103 Kaszkád-arányszabályzás cél: két mennyiség arányának állandó értéken tartása mellett a lassabb lefolyású zavarások kompenzálása megoldás: arányszabályzás kialakítása a legfontosabb és leggyorsabb zavarás hatásának kiküszöbölésére kaszkádkör kialakítása a lassabb zavarások kompenzálására Szabályozás/103
104 Kaszkád-arányszabályzás K w 1 (s) Q z(s) y 1 (s) Q G c1 (s) u 1 (s) u 2 (s) q v2 c 2 q v1 c 1 c A y 2 (s) G c2 (s) w 2 (s) Szabályozás/104
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Az egységugrás függvény a 0 időpillanatot követően 10 nagyságú jelet ad, valamint K=2. Vizsgáljuk meg a kimenetet:
 II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
Számítógépes gyakorlat Irányítási rendszerek szintézise
 Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra
 SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra") Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Az irányítástechnika alapfogalmai. 2008.02.15. Irányítástechnika MI BSc 1
 Az irányítástechnika alapfogalmai 2008.02.15. 1 Irányítás fogalma irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány irányítás: olyan művelet,
Az irányítástechnika alapfogalmai 2008.02.15. 1 Irányítás fogalma irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány irányítás: olyan művelet,
SZABÁLYOZÁSI KÖRÖK 2.
 Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
Történeti Áttekintés
 Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból
 Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
IRÁNYÍTÁSTECHNIKAI ALAPOK. Erdei István Grundfos South East Europe Kft.
 IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
L-transzformáltja: G(s) = L{g(t)}.
 = L{g(t)}.") Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Márkus Zsolt Tulajdonságok, jelleggörbék, stb BMF -
 Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Az irányítástechnika alapfogalmai
 Az irányítástechnika alapfogalmai 2014. 02. 08. Folyamatirányítás - bevezetés Legyen adott egy tetszőleges technológiai rendszer Mi a cél? üzemeltetés az előírt tevékenység elvégzése (termék előállítása,
Az irányítástechnika alapfogalmai 2014. 02. 08. Folyamatirányítás - bevezetés Legyen adott egy tetszőleges technológiai rendszer Mi a cél? üzemeltetés az előírt tevékenység elvégzése (termék előállítása,
Irányítástechnika II. előadásvázlat
 Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Frekvenciatartomány Irányítástechnika PE MI BSc 1
 Frekvenciatartomány ny 008.03.4. Irányítátechnika PE MI BSc Frekvenciatartomány bevezetéének indoka: általában időtartománybeli válaz kell alkalmazott teztelek i ezt indokolák információ rendzerek eetében
Frekvenciatartomány ny 008.03.4. Irányítátechnika PE MI BSc Frekvenciatartomány bevezetéének indoka: általában időtartománybeli válaz kell alkalmazott teztelek i ezt indokolák információ rendzerek eetében
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata.
 1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
Irányítástechnika 2. előadás
 Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
1. Fejezet. Visszacsatolt erősítők. Elektronika 2 (BMEVIMIA027)
") Elektronika (MEVIMI07) Fejezet Visszacsatolt erősítők visszacsatolás célja: az erősítő paramétereinek igények szerinti megváltoztatása visszacsatolás elve (a J jel : vagy feszültség, vagy áram): J ki =
Elektronika (MEVIMI07) Fejezet Visszacsatolt erősítők visszacsatolás célja: az erősítő paramétereinek igények szerinti megváltoztatása visszacsatolás elve (a J jel : vagy feszültség, vagy áram): J ki =
Hurokegyenlet alakja, ha az áram irányával megegyező feszültségeséseket tekintjük pozitívnak:
 Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Irányítástechnika labor Elméleti összefoglaló
 Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához
 Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához Gerzson Miklós 2015. december 8. 2 Tartalomjegyzék Bevezetés 5 1. Kötelező kérdések 7 1.1. Kötelező kérdések a Kalman-féle
Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához Gerzson Miklós 2015. december 8. 2 Tartalomjegyzék Bevezetés 5 1. Kötelező kérdések 7 1.1. Kötelező kérdések a Kalman-féle
Műveleti erősítők. 1. Felépítése. a. Rajzjele. b. Belső felépítés (tömbvázlat) c. Differenciálerősítő
 c. Differenciálerősítő") Műveleti erősítők A műveleti erősítők egyenáramú erősítőfokozatokból felépített, sokoldalúan felhasználható áramkörök, amelyek jellemzőit A u ', R be ', stb. külső elemek csatlakoztatásával széles határok
Műveleti erősítők A műveleti erősítők egyenáramú erősítőfokozatokból felépített, sokoldalúan felhasználható áramkörök, amelyek jellemzőit A u ', R be ', stb. külső elemek csatlakoztatásával széles határok
Tartalom. 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció)
") Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Irányítástechnika. II. rész. Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu
 Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Ideális műveleti erősítő
 Ideális műveleti erősítő Az műveleti erősítő célja, hogy alap építőeleméül szolgáljon analóg matematikai műveleteket végrehajtó áramköröknek. Az ideális műveleti erősítő egy gyakorlatban nem létező áramköri
Ideális műveleti erősítő Az műveleti erősítő célja, hogy alap építőeleméül szolgáljon analóg matematikai műveleteket végrehajtó áramköröknek. Az ideális műveleti erősítő egy gyakorlatban nem létező áramköri
Jelek és rendszerek - 4.előadás
 Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 01 Automatikai technikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 01 Automatikai technikus
Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium
 Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium 4.. Két- és háromállású szabályozók. A két- és háromállású szabályozók nem-olytonos kimenettel
Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium 4.. Két- és háromállású szabályozók. A két- és háromállású szabályozók nem-olytonos kimenettel
Mechatronika alapjai órai jegyzet
 - 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
- 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Gáznyomás-szabályozás, nyomásszabályozó állomások
 Gáznyomás-szabályozás, nyomásszabályozó állomások Horánszky Beáta 2018. október Gáznyomás-szabályozás 1 Földgázszállító és -elosztó rendszer F O R R Á S O L D A L Hazai földgáztermelő mező kiadási pontja
Gáznyomás-szabályozás, nyomásszabályozó állomások Horánszky Beáta 2018. október Gáznyomás-szabályozás 1 Földgázszállító és -elosztó rendszer F O R R Á S O L D A L Hazai földgáztermelő mező kiadási pontja
Alaptagok Nyquist- és Bode-diagramjai
 C Alaptagok Nyquist- és Bode-diagramjai C.1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik módja az átviteli függvények segítségével történik. Az átviteli függvényeket
C Alaptagok Nyquist- és Bode-diagramjai C.1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik módja az átviteli függvények segítségével történik. Az átviteli függvényeket
Irányítástechnika 12. évfolyam
 Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Digitális jelfeldolgozás
 Digitális jelfeldolgozás Átviteli függvények Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. október 13. Digitális
Digitális jelfeldolgozás Átviteli függvények Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. október 13. Digitális
MECHATRONIKA Mechatronika alapképzési szak (BSc) záróvizsga kérdései. (Javítás dátuma: )
 záróvizsga kérdései. (Javítás dátuma: )") MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Tartalom. Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra
 Tartalom Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra 2015 1 Robusztus stabilitás Szabályozási rendszer tervezésének gyakorlati problémája az, hogy az aktuális rendszer G(s) átviteli
Tartalom Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra 2015 1 Robusztus stabilitás Szabályozási rendszer tervezésének gyakorlati problémája az, hogy az aktuális rendszer G(s) átviteli
2. Folytonos lineáris rendszerek leírása az id!-, az operátor- és a frekvenciatartományban
 Önellen!rz! kérdések 1. Bevezetés 1. Ismertessen néhány tipikus irányítási feladatot! 2. Definiálja az irányítás m!veletét, ismertesse a kézi és automatikus irányítás közötti különbséget! 3. Ismertesse
Önellen!rz! kérdések 1. Bevezetés 1. Ismertessen néhány tipikus irányítási feladatot! 2. Definiálja az irányítás m!veletét, ismertesse a kézi és automatikus irányítás közötti különbséget! 3. Ismertesse
Irányítástechnika 4. előadás
 Iránítátechnika 4. előadá Dr. Kovác Levente 3. 4. 3. 3.5.. artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi
Iránítátechnika 4. előadá Dr. Kovác Levente 3. 4. 3. 3.5.. artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi
Szabályozástechnika II.
 TÁMOP-4.1.1.F-14/1/KONV-215-9 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika II. Pécs 215 A tananyag
TÁMOP-4.1.1.F-14/1/KONV-215-9 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika II. Pécs 215 A tananyag
OMRON MŰSZAKI INFORMÁCIÓK OMRON
 A hőmérséklet A stabil hőmérséklethoz szükséges idő függ a szabályozott rendszertől. A válaszidő megrövidítése rendszerint, túllövést vagy lengő rendszert fog eredményezni. Ha csökkentjük a hőmérséklet
A hőmérséklet A stabil hőmérséklethoz szükséges idő függ a szabályozott rendszertől. A válaszidő megrövidítése rendszerint, túllövést vagy lengő rendszert fog eredményezni. Ha csökkentjük a hőmérséklet
Jelgenerátorok ELEKTRONIKA_2
 Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Irányítástechnikai alapok. Zalotay Péter főiskolai docens KKMF
 Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Lineáris rendszerek stabilitása
 Lineáris rendszerek stabilitása A gyakrlat célja A dlgzatban a lineáris rendszerek stabilitásának fgalmát vezetjük be majd megvizsgáljuk a stabilitás vizsgálati módszereket. Elméleti bevezető Egy LTI rendszer
Lineáris rendszerek stabilitása A gyakrlat célja A dlgzatban a lineáris rendszerek stabilitásának fgalmát vezetjük be majd megvizsgáljuk a stabilitás vizsgálati módszereket. Elméleti bevezető Egy LTI rendszer
5. Hét Sorrendi hálózatok
 5. Hét Sorrendi hálózatok Digitális technika 2015/2016 Bevezető példák Példa 1: Italautomata Legyen az általunk vizsgált rendszer egy italautomata, amelyről az alábbi dolgokat tudjuk: 150 Ft egy üdítő
5. Hét Sorrendi hálózatok Digitális technika 2015/2016 Bevezető példák Példa 1: Italautomata Legyen az általunk vizsgált rendszer egy italautomata, amelyről az alábbi dolgokat tudjuk: 150 Ft egy üdítő
Jelkondicionálás. Elvezetés. a bioelektromos jelek kis amplitúdójúak. extracelluláris spike: néhányszor 10 uv. EEG hajas fejbőrről: max 50 uv
 Jelkondicionálás Elvezetés 2/12 a bioelektromos jelek kis amplitúdójúak extracelluláris spike: néhányszor 10 uv EEG hajas fejbőrről: max 50 uv EKG: 1 mv membránpotenciál: max. 100 mv az amplitúdó növelésére,
Jelkondicionálás Elvezetés 2/12 a bioelektromos jelek kis amplitúdójúak extracelluláris spike: néhányszor 10 uv EEG hajas fejbőrről: max 50 uv EKG: 1 mv membránpotenciál: max. 100 mv az amplitúdó növelésére,
Irányítástechnika Elıadás. Zárt szabályozási körök stabilitása
 Irányítástechnika 2 7. Elıadás Zárt szabályozási körök stabilitása Irodalom - Csáki Frigyes, Bars Ruth: Automatika.1974 - Mórocz István: Irányítástechnika I. Analóg szabályozástechnika. 1996 - Benjamin
Irányítástechnika 2 7. Elıadás Zárt szabályozási körök stabilitása Irodalom - Csáki Frigyes, Bars Ruth: Automatika.1974 - Mórocz István: Irányítástechnika I. Analóg szabályozástechnika. 1996 - Benjamin
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
Irányítástechnika 2. Levelező tagozat. 1. Előadás
 Irányítástechnika 2 Levelező tagozat 1. Előadás Az irányítástechnika felosztása Szabályozás, vezérlés összehasonlítása Laplace transzformáció, rendszerjellemző függvények Nyquist- és Bode diagram Ajánlott
Irányítástechnika 2 Levelező tagozat 1. Előadás Az irányítástechnika felosztása Szabályozás, vezérlés összehasonlítása Laplace transzformáció, rendszerjellemző függvények Nyquist- és Bode diagram Ajánlott
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Stabilitás Irányítástechnika PE MI_BSc 1
 Stabilitás 2008.03.4. Stabilitás egyszerűsített szemlélet példa zavarás utá a magára hagyott redszer visszatér a yugalmi állapotába kvázistacioárius állapotba kerül végtelebe tart alapjelváltás Stabilitás/2
Stabilitás 2008.03.4. Stabilitás egyszerűsített szemlélet példa zavarás utá a magára hagyott redszer visszatér a yugalmi állapotába kvázistacioárius állapotba kerül végtelebe tart alapjelváltás Stabilitás/2
Alaptagok Nyquist és Bode diagramjai
 Alaptagok Nyquist és Bode diagramjai Luspay Tamás, Bauer Péter BME Közlekedésautomatikai Tanszék 212. január 1. 1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik
Alaptagok Nyquist és Bode diagramjai Luspay Tamás, Bauer Péter BME Közlekedésautomatikai Tanszék 212. január 1. 1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik
ÍRÁSBELI FELADAT MEGOLDÁSA
 54 523 01 0000 00 00-2013 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT MEGOLDÁSA Szakképesítés: 54 523 01 0000 00 00 SZVK rendelet száma: Modulok: 0919-06/2
54 523 01 0000 00 00-2013 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT MEGOLDÁSA Szakképesítés: 54 523 01 0000 00 00 SZVK rendelet száma: Modulok: 0919-06/2
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Szakképesítés: 54 523 01 Automatikai technikus Szóbeli vizsgatevékenység A vizsgafeladat megnevezése: Irányítástechnikai alapok, gyártórendszerek
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
RENDSZERTECHNIKA 8. GYAKORLAT
 RENDSZERTECHNIKA 8. GYAKORLAT ÜTEMTERV VÁLTOZÁS Gyakorlat Hét Dátum Témakör Házi feladat Egyéb 1 1. hét 02.09 Ismétlés, bevezetés Differenciálegyenletek mérnöki 2 2. hét 02.16 szemmel 1. Hf kiadás 3 3.
RENDSZERTECHNIKA 8. GYAKORLAT ÜTEMTERV VÁLTOZÁS Gyakorlat Hét Dátum Témakör Házi feladat Egyéb 1 1. hét 02.09 Ismétlés, bevezetés Differenciálegyenletek mérnöki 2 2. hét 02.16 szemmel 1. Hf kiadás 3 3.
Irányításelmélet és technika I.
 Irányításelmélet és technika I Folytonos idejű rendszerek leírása az állapottérben Állapotvisszacsatolást alkalmazó szabályozási körök Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki
Irányításelmélet és technika I Folytonos idejű rendszerek leírása az állapottérben Állapotvisszacsatolást alkalmazó szabályozási körök Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás Jelen gyűjtő munkát készítette Fölföldi Konrád,
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás Jelen gyűjtő munkát készítette Fölföldi Konrád,
Négypólusok tárgyalása Laplace transzformációval
 Négypólusok tárgyalása Laplace transzformációval Segédlet az Elektrotechnika II. c. tantárgyhoz Összeállította: Dr. Kurutz Károly egyetemi tanár Szászi István egyetemi tanársegéd . Laplace transzformáció
Négypólusok tárgyalása Laplace transzformációval Segédlet az Elektrotechnika II. c. tantárgyhoz Összeállította: Dr. Kurutz Károly egyetemi tanár Szászi István egyetemi tanársegéd . Laplace transzformáció
Irányítástechnika 2. 1. Elıadás
 Irányítástechnika 2 1. Elıadás Az irányítástechnika felosztása. Szabályozás, vezérlés összehasonlítása. Jel, szerv, tag, hatásvázlat, mőködési vázlat Irodalom - Petz Ernı: Bevezetı irányítástechnikai alapismeretek,
Irányítástechnika 2 1. Elıadás Az irányítástechnika felosztása. Szabályozás, vezérlés összehasonlítása. Jel, szerv, tag, hatásvázlat, mőködési vázlat Irodalom - Petz Ernı: Bevezetı irányítástechnikai alapismeretek,
Folyamatirányítás. Számítási gyakorlatok. Gyakorlaton megoldandó feladatok. Készítette: Dr. Farkas Tivadar
 Folyamatirányítás Számítási gyakorlatok Gyakorlaton megoldandó feladatok Készítette: Dr. Farkas Tivadar 2010 I.-II. RENDŰ TAGOK 1. feladat Egy tökéletesen kevert, nyitott tartályban folyamatosan meleg
Folyamatirányítás Számítási gyakorlatok Gyakorlaton megoldandó feladatok Készítette: Dr. Farkas Tivadar 2010 I.-II. RENDŰ TAGOK 1. feladat Egy tökéletesen kevert, nyitott tartályban folyamatosan meleg
Tájékoztató. Használható segédeszköz: számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított), a 27/2012 (VIII. 27.) NGM rendelet a 29/2016 (III.26.) NMG rendelet által módosított, a 27/2012 (VIII. 27.) NGM rendelet
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított), a 27/2012 (VIII. 27.) NGM rendelet a 29/2016 (III.26.) NMG rendelet által módosított, a 27/2012 (VIII. 27.) NGM rendelet
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9.
 9.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
ÁGAZATI SZAKMAI ÉRETTSÉGI VIZSGA VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK
 VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
Optidrive alkalmazás-támogatás gyûjtemény Jegyzékszám Cím Termékcsoport Szint
 Optidrive alkalmazás-támogatás gyûjtemény Jegyzékszám Cím Termékcsoport Szint 2 Áttekintés AN-ODE-2-032 PI zárt hurkú visszacsatolt vezérléses alkalmazások Optidrive E2 1 Alapvető nem szükséges alaptudás
Optidrive alkalmazás-támogatás gyûjtemény Jegyzékszám Cím Termékcsoport Szint 2 Áttekintés AN-ODE-2-032 PI zárt hurkú visszacsatolt vezérléses alkalmazások Optidrive E2 1 Alapvető nem szükséges alaptudás
milyen mennyiségeket jelölnek a Bode diagram tengelyei? csoportosítsa a determinisztikus jeleket!
 A 2011-es ZH kérdései emlékezetből, majd közösen kidolgozva. Lehet benne rossz, de elég sokan szerkesztettük egyszerre, szóval feltehetően a nagyja helyes. milyen mennyiségeket jelölnek a Bode diagram
A 2011-es ZH kérdései emlékezetből, majd közösen kidolgozva. Lehet benne rossz, de elég sokan szerkesztettük egyszerre, szóval feltehetően a nagyja helyes. milyen mennyiségeket jelölnek a Bode diagram
FOLYAMATIRÁNYÍTÁSI RENDSZEREK
 Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
1. ábra A visszacsatolt erősítők elvi rajza. Az 1. ábrán látható elvi rajz alapján a kövezkező összefüggések adódnak:
 Az erősítő alapkapcsolások, de a láncbakapcsolt erősítők nem minden esetben teljesítik azokat az elvárásokat, melyeket velük szemben támasztanánk. Ilyen elvárások lehetnek a következők: nagy bemeneti ellenállás;
Az erősítő alapkapcsolások, de a láncbakapcsolt erősítők nem minden esetben teljesítik azokat az elvárásokat, melyeket velük szemben támasztanánk. Ilyen elvárások lehetnek a következők: nagy bemeneti ellenállás;
Számítógép-vezérelt szabályozás- és irányításelmélet
 Számítógép-vezérelt szabályozás- és irányításelmélet 2. gyakorlat Feladattípusok két függvény konvolúciója ÿ + aẏ + by = e at, y(), ẏ() típusú kezdetiérték feladatok megoldása (Laplace transzformációval)
Számítógép-vezérelt szabályozás- és irányításelmélet 2. gyakorlat Feladattípusok két függvény konvolúciója ÿ + aẏ + by = e at, y(), ẏ() típusú kezdetiérték feladatok megoldása (Laplace transzformációval)
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 01 Automatikai technikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 01 Automatikai technikus
10.1. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
Analóg áramkörök Műveleti erősítővel épített alapkapcsolások
 nalóg áramkörök Műveleti erősítővel épített alapkapcsolások Informatika/Elektronika előadás encz Márta/ess Sándor Elektronikus Eszközök Tanszék 07-nov.-22 Témák Műveleti erősítőkkel kapcsolatos alapfogalmak
nalóg áramkörök Műveleti erősítővel épített alapkapcsolások Informatika/Elektronika előadás encz Márta/ess Sándor Elektronikus Eszközök Tanszék 07-nov.-22 Témák Műveleti erősítőkkel kapcsolatos alapfogalmak
Elektronika Oszcillátorok
 8. Az oszcillátorok periodikus jelet előállító jelforrások, generátorok. Olyan áramkörök, amelyeknek csak kimenete van, bemenete nincs. Leggyakoribb jelalakok: - négyszög - szinusz A jelgenerálás alapja
8. Az oszcillátorok periodikus jelet előállító jelforrások, generátorok. Olyan áramkörök, amelyeknek csak kimenete van, bemenete nincs. Leggyakoribb jelalakok: - négyszög - szinusz A jelgenerálás alapja
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Digitális jelfeldolgozás
 Digitális jelfeldolgozás Mintavételezés és jel-rekonstrukció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2010.
Digitális jelfeldolgozás Mintavételezés és jel-rekonstrukció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2010.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
Elektronika zöldfülűeknek
 Ha hibát találsz, jelezd itt: Elektronika zöldfülűeknek R I = 0 Szakadás, olyan mintha kiradíroznánk az ellenállást vezetékekkel együtt. A feszültség nem feltétlen ugyanakkora a két oldalon. Üresjárat,
Ha hibát találsz, jelezd itt: Elektronika zöldfülűeknek R I = 0 Szakadás, olyan mintha kiradíroznánk az ellenállást vezetékekkel együtt. A feszültség nem feltétlen ugyanakkora a két oldalon. Üresjárat,
Logaritmikus erősítő tanulmányozása
 13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
Kaszkád T szabályozás Használati útmutató
 Kaszkád szabályozás Használati útmutató nagy késlekedésű rendszereket csak nagyon lassan lehet szabályozni. Egy retortás kemencében a munkadarab, vagy a hőkezelt anyag egy tokban van. Ezt a tokot körülveszi
Kaszkád szabályozás Használati útmutató nagy késlekedésű rendszereket csak nagyon lassan lehet szabályozni. Egy retortás kemencében a munkadarab, vagy a hőkezelt anyag egy tokban van. Ezt a tokot körülveszi
Ipari mintavételes PID szabályozóstruktúra megvalósítása
 Ipari mintavételes PID szabályozóstruktúra megvalósítása 1. A gyakorlat célja Készítsen diszkrét PID szabályozót megvalósító programot C++, obiektumorientált környezetben. Teszteléssel igazolja a szabályozó
Ipari mintavételes PID szabályozóstruktúra megvalósítása 1. A gyakorlat célja Készítsen diszkrét PID szabályozót megvalósító programot C++, obiektumorientált környezetben. Teszteléssel igazolja a szabályozó
Építőelemek összessége (eszköz, berendezés, módszer, művelet), mellyel az irányító berendezések megtervezhetők.
, mellyel az irányító berendezések megtervezhetők.") Márkus Zsolt markus.zsolt@qos.hu Az irányítástechnika (automatika) az önműködő irányítás törvényszerűségeivel, és a gyakorlati megvalósításlehetőségeivel foglalkozik. Építőelemek összessége (eszköz, berendezés,
Márkus Zsolt markus.zsolt@qos.hu Az irányítástechnika (automatika) az önműködő irányítás törvényszerűségeivel, és a gyakorlati megvalósításlehetőségeivel foglalkozik. Építőelemek összessége (eszköz, berendezés,
Folytonos rendszeregyenletek megoldása. 1. Folytonos idejű (FI) rendszeregyenlet általános alakja
 rendszeregyenlet általános alakja") Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel
 1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel eltolt Dirac impulzusokból áll. Adja meg a hordozó jel I (s) T Laplace-transzformáltját és annak
1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel eltolt Dirac impulzusokból áll. Adja meg a hordozó jel I (s) T Laplace-transzformáltját és annak
Megoldott feladatok november 30. n+3 szigorúan monoton csökken, 5. n+3. lim a n = lim. n+3 = 2n+3 n+4 2n+1
 Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Mérésadatgyűjtés, jelfeldolgozás.
 Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Dr. Gyurcsek István. Példafeladatok. Helygörbék Bode-diagramok HELYGÖRBÉK, BODE-DIAGRAMOK DR. GYURCSEK ISTVÁN
 Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Elektronika Előadás. Műveleti erősítők táplálása, alkalmazása, alapkapcsolások
 Elektronika 2 2. Előadás Műveleti erősítők táplálása, alkalmazása, alapkapcsolások Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
Elektronika 2 2. Előadás Műveleti erősítők táplálása, alkalmazása, alapkapcsolások Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
( ) abszolút érték függvényét!
 abszolút érték függvényét!") Modulzáró példák. Folytono lineári rendzerek leíráa az idő-, az operátor- é a frekvenciatartományban. Egy lineári rendzer frekvenciafüggvényének fázimenete: (")= # 90 # 5". Írja fel a rendzer átviteli
Modulzáró példák. Folytono lineári rendzerek leíráa az idő-, az operátor- é a frekvenciatartományban. Egy lineári rendzer frekvenciafüggvényének fázimenete: (")= # 90 # 5". Írja fel a rendzer átviteli
DDC rendszerelemek, DIALOG-II család
 DDC rendszerelemek, DIALOG-II család KIVITEL ALKALMAZÁS BEKÖTÉS A SYS-100 L típusú készülék egyszerű légkezelő szabályzására kifejlesztet integráló szabályzó. Egy kalorifert tartalmazó légtechnikákhoz
DDC rendszerelemek, DIALOG-II család KIVITEL ALKALMAZÁS BEKÖTÉS A SYS-100 L típusú készülék egyszerű légkezelő szabályzására kifejlesztet integráló szabályzó. Egy kalorifert tartalmazó légtechnikákhoz
A 2009-es vizsgákon szereplő elméleti kérdések
 Kivezérelhetőség és teljesítményfokozatok: A 2009-es vizsgákon szereplő elméleti kérdések 1. Ismertesse a B osztályú teljesítményfokozat tulajdonságait (P fmax, P Tmax, P Dmax(1 tr), η Tmax )! (szinuszos
Kivezérelhetőség és teljesítményfokozatok: A 2009-es vizsgákon szereplő elméleti kérdések 1. Ismertesse a B osztályú teljesítményfokozat tulajdonságait (P fmax, P Tmax, P Dmax(1 tr), η Tmax )! (szinuszos
Haszongépj. Németh. Huba. és s Fejlesztési Budapest. Kutatási. Knorr-Bremse. 2004. November 17. Knorr-Bremse 19.11.
 Haszongépj pjármű fékrendszer intelligens vezérl rlése Németh Huba Knorr-Bremse Kutatási és s Fejlesztési si Központ, Budapest 2004. November 17. Knorr-Bremse 19.11.2004 Huba Németh 1 Tartalom Motiváció
Haszongépj pjármű fékrendszer intelligens vezérl rlése Németh Huba Knorr-Bremse Kutatási és s Fejlesztési si Központ, Budapest 2004. November 17. Knorr-Bremse 19.11.2004 Huba Németh 1 Tartalom Motiváció
ELEKTRONIKAI ALAPISMERETEK
 ÉRETTSÉGI VIZSGA 2015. május 19. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2015. május 19. 8:00 Az írásbeli vizsga időtartama: 240 perc Pótlapok száma Tisztázati Piszkozati EMBERI ERŐFORRÁSOK
ÉRETTSÉGI VIZSGA 2015. május 19. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2015. május 19. 8:00 Az írásbeli vizsga időtartama: 240 perc Pótlapok száma Tisztázati Piszkozati EMBERI ERŐFORRÁSOK
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008