Irányítástechnika 2. Levelező tagozat. 1. Előadás
|
|
|
- Imre Hegedüs
- 6 évvel ezelőtt
- Látták:
Átírás
1 Irányítástechnika 2 Levelező tagozat 1. Előadás Az irányítástechnika felosztása Szabályozás, vezérlés összehasonlítása Laplace transzformáció, rendszerjellemző függvények Nyquist- és Bode diagram
2 Ajánlott szakirodalom 1. Jancskárné Anweiler I. (2015) Szabályozástechnika I. ISBN: Jancskárné Anweiler I. (2015) Szabályozástechnika II.ISBN: Csáki Frigyes, Bars Ruth: Automatika, Tankönyvkiadó, Petz Ernő: Bevezető irányítástechnikai alapismeretek, Főiskolai Irányítástechnikai Oktatás-módszertani Munkabizottság, Mórocz István: Irányítástechnika I. Analóg szabályozástechnika, U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki Könyvkiadó, Budapest, Aradi Petra, Niedermayer Péter: Szabályozáselmélet segédlet, BME, Keviczky L, Bars R, Hetthéssy J, Bartha A, Bányász Cs (2006) Szabályozástechnika. Universitas Kht Győr. 9. Szilágyi Béla, Juhász Ferencné: Szabályozástechnika. Alapfogalmak, cikksorozat, Elektronika, JJ Di Stefano, AR Stubberud, IJ Williams: Feedback and Control Systems, McGraw-Hill, Eduardo D. Sontag, Mathematical Control Theory: Deterministic Finite Dimensional Systems, Springer, New York, GC Goodwin, SF Graebe, ME Salgado: Control System Design, Prentice Hall, Benjamin C. Kuo, Farid Golnaraghi: Automatic Control Systems, John Wiley & Sons, Suzanne Lenhart: Control System Theory, University of Tennessee, Knoxville, B Wittenmark, KJ Åström, KE Årzén: Computer Control: An Overview, Lund Institute of Technology, Max Rabiee: Programmable Logic Controllers, Hardware and programming (2018) ISBN-13: K Craig: Multimechatronics Course Notes, Hofstra University, Long Island, New York,
3 Folyamatirányítási mechanizmusok Technológiai folyamatok irányításának mechanizmusai: információszerzés az irányított folyamatról: érzékelés, az információk feldolgozása: ítéletalkotás, az ítéletalkotás eredményétől függő rendelkezés a beavatkozásra: rendelkezésadás, a folyamat módosított jellemzőinek a megváltoztatása azért, hogy az előre megfogalmazott követelmények megvalósuljanak: beavatkozás.
4 Az folyamatirányítás eszközei Az információ szerzés eszközei: érzékelő szervek (szenzorok); A szabályozott folyamat paramétereit mérik és a mért mennyiséget a szabályozó által értelmezhető (elektromos) jellé alakítják. Az információ feldolgozás eszköze: szabályozó (controller); A szabályozási algoritmust realizálja: a beszerzett információk alapján kiszámítja, hogy milyen mértékű beavatkozás szükséges, és rendelkezik ennek végrehajtásáról. A beavatkozás feladatát ellátják: beavatkozó szervek (aktuátorok). A szabályozó rendelkezéseit átalakítják megfelelő természetű és nagyságú jelekké, amelyek a folyamatot a kívánt módon befolyásolják.
5 A folyamatirányítás alapműveletei A b folyamatba bevezetett anyag A k félkész vagy késztermék E b átalakításhoz szükséges energia E k átalakult vagy hulladék energia
6 Az irányítástechnika felosztása Vezérlés nyitott hatáslánc, nem valósítható meg a zavarkompenzáció Szabályozás zárt hatáslánc (szabályozott jellemző visszacsatolása), zavarkompenzáció megvalósítható
7 Vezérlés elemei Vezérlés működési vázlata
8 A vezérlések programozástól függő felosztása forrasztott és csavarkötések diódás mátrix, keresztsínes dugaszolható PLC-k memória chip cserével módosítható kötött program, de paraméterezhető
9 Szabályozás elemei Szabályozás működési vázlata Szabályozás hatásvázlata
10 Jelek az irányítástechnikában A jelek jellemzési szempontjai: - Értékkészlet - Időbeli lefolyás - Az információ megjelenési formája - Az érték meghatározottsága
11 Az irányítási rendszerek ábrázolása Szerkezeti vázlat Működési vázlat Tömbvázlat Hatásvázlat Jelfolyamábra

12 Egyik első műszaki szabályozó: a centrifugális regulátor James Watt és Matthew Boulton regulátora (1788) Gőzgép fordulatszámát közel állandóan tartja széles terhelés-tartományban. Hasonló szerkezetet már a 17. században használtak szélmalom-őrlőkő sebesség és nyomás szabályozására. Alapja egy kúpinga. Irányítástechnikai szempontból arányos szabályozó. A szabályozástechnika egyik alapműve: Maxwell, James Clerk (1868). On Governors. 16. Proceedings of the Royal Society of London. pp

13 Állásos szabályozás: Melegvíztároló hőmérsékletszabályozása Szerkezeti vázlat
14 Hatásvázlat alapjel: az előírt vízhőmérséklet; módosított jellemző: a tápfeszültség értéke; zavaró jelek: hidegvíz hőmérséklete, hozama, külső hőmérséklet; szabályozott jellemző: a tényleges vízhőmérséklet.

15 Arányos szabályozás: Egyenáramú villanymotor fordulatszám szabályozása Szerkezeti vázlat

16 Működési vázlat A fordulatszám szabályozási rendszer működési vázlata és a szabályozó berendezés szervei és jelei


17 Hatásvázlat Az egyhurkos szabályozás hatásvázlata Egyenáramú motor automatikus fordulatszámszabályozásának hatásvázlata alapjel: az előírt fordulatszám; módosított jellemző: a kapocsfeszültség; zavaró jel: a terhelőnyomaték; szabályozott jellemző: a tényleges fordulatszám. a rendelkező jel a hibával arányos; az arányos szabályozás esetén állandósult állapotban a hibajel nem lehet zérus.
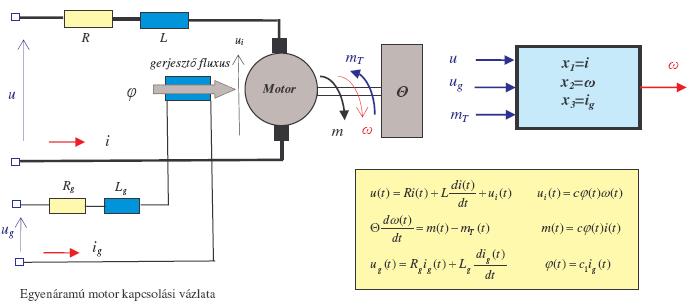
18 Szakasz állapotegyenletei
19 Hatásvázlat

20 Integrálszabályozás: Szintszabályozás Szerkezeti vázlat
21 Hatásvázlat Szabad kiáramlású tartály, változó beáramló hozammal. alapjel: az előírt szint; módosított jellemző: a pótolt hozam; zavaró jel: a beáramló hozam; szabályozott jellemző: a tényleges szint. integrálszabályozás esetén állandósult állapotban a hibajel mindig zérus.
22 Klasszikus PID szabályozás Minorsky (1922) Directional stability of automatically steered bodies, J. Am. Soc. Naval Eng., 34, p.284 a kormányosok tapasztalati eredményei alapján először fejlesztett ki PID szabályozást. Az USS New Mexico hajón kipróbált módszer 1.6 iránystabilitást biztosított, jobbat, mint amire a legtöbb kormányos képes volt. P arányos; I integráló; D differenciáló; Valós tag számlálójának foka nem lehet nagyobb a nevezőnél. Soros alak: Általában τ 1 és τ 2 a szakasz két legnagyobb időállandójával egyenlőnek választjuk, T C -t kisebbnek.
23 A Laplace transzformáció s = s + j w Eltolási tétel:
24 Inverz Laplace transzformáció Reziduum tétel
25 A Laplace transzformáció tulajdonságai Linearitás: Differenciálási szabály: Integrálási szabály:
26 A Laplace transzformáció tulajdonságai A konvolúció tételei: Kezdeti és végérték tételek:

27 A lineáris differenciálegyenlet megoldása Laplace transzformációval
28 Rendszerjellemző függvények Súlyfüggvény (impulse response): az u(t) = d(t) Dirac deltára adott y(t)=w(t) válasz, zérus kezdeti feltételek mellett. Segítségével kiszámítható a tag válasza tetszőleges gerjesztés esetén, a súlyfüggvény és a gerjesztőfüggvény konvolúciójaként:
29 Rendszerjellemző függvények Átmeneti függvény (step response): az u(t)=1(t) egységugrásra adott y(t)=v(t) válasz, zérus kezdeti feltételek mellett. Segítségével kiszámítható a tag válasza tetszőleges gerjesztés esetén, az átmeneti függvény és a gerjesztőfüggvény deriváltjának konvolúciójaként:
 kimenőjel és az u(t) bemenőjel Laplace transzformáltjainak W(s)=y(s)/u(s) hányadosa, zérus kezdeti feltételek")
30 Rendszerjellemző függvények Átviteli függvény (transfer function): a w(t) súlyfüggvény L{w(t)}=W(s) Laplace transzformáltja, vagy az y(t) kimenőjel és az u(t) bemenőjel Laplace transzformáltjainak W(s)=y(s)/u(s) hányadosa, zérus kezdeti feltételek esetén.
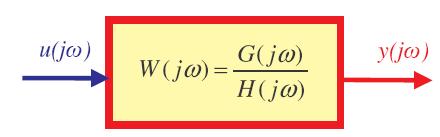
31 Rendszerjellemző függvények Frekvencia függvény (frequency response): a w(t) súlyfüggvény F{w(t)}=W(wj) Fourier transzformáltja, vagy az u(t) bemenőjel és az y(t) kimenőjel Fourier transzformáltjainak W(wj)=y(wj)/u(wj) hányadosa, zérus kezdeti feltételek esetén. A komplex formalizmus segítségével közvetlenül felírható, a kimenő- illetve bemenő-jelek (általában feszültség) komplex reprezentációinak hányadosaként.
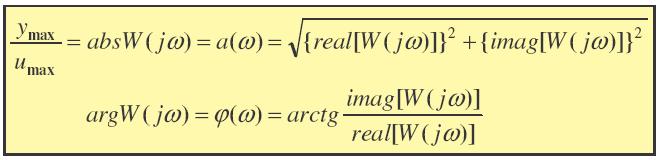
32 Rendszer-jellemzés frekvencia-tartományban
33 Frekvenciafüggvény ábrázolása Bode diagram
34 Bode diagram T h a holtidő:
35 Bode diagram

36 Bode diagram közelítő szerkesztése

37 Bode diagram közelítő szerkesztése
38 Példa Bode diagram közelítő szerkesztésére
39 Példa Bode diagram közelítő szerkesztésére A pontos diagram:
40 Nyquist diagram
41 Áramköri példa
42 Fáziskésleltető RC áramkör
43 Fáziskésleltető RC áramkör
44 Fázissiettető RC áramkör
45 Fázissiettető RC áramkör
Ipari folyamatirányítás
 Mechatronika továbbképzés Ipari folyamatirányítás 1. Előadás A folyamatirányítás felosztása Szabályozás, vezérlés összehasonlítása Ajánlott szakirodalom 1. Jancskárné Anweiler I. (2015) Szabályozástechnika
Mechatronika továbbképzés Ipari folyamatirányítás 1. Előadás A folyamatirányítás felosztása Szabályozás, vezérlés összehasonlítása Ajánlott szakirodalom 1. Jancskárné Anweiler I. (2015) Szabályozástechnika
Irányítástechnika 2. 1. Elıadás
 Irányítástechnika 2 1. Elıadás Az irányítástechnika felosztása. Szabályozás, vezérlés összehasonlítása. Jel, szerv, tag, hatásvázlat, mőködési vázlat Irodalom - Petz Ernı: Bevezetı irányítástechnikai alapismeretek,
Irányítástechnika 2 1. Elıadás Az irányítástechnika felosztása. Szabályozás, vezérlés összehasonlítása. Jel, szerv, tag, hatásvázlat, mőködési vázlat Irodalom - Petz Ernı: Bevezetı irányítástechnikai alapismeretek,
Az irányítástechnika alapfogalmai. 2008.02.15. Irányítástechnika MI BSc 1
 Az irányítástechnika alapfogalmai 2008.02.15. 1 Irányítás fogalma irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány irányítás: olyan művelet,
Az irányítástechnika alapfogalmai 2008.02.15. 1 Irányítás fogalma irányítástechnika: önműködő irányítás törvényeivel és gyakorlati megvalósításával foglakozó műszaki tudomány irányítás: olyan művelet,
Az irányítástechnika alapfogalmai
 Az irányítástechnika alapfogalmai 2014. 02. 08. Folyamatirányítás - bevezetés Legyen adott egy tetszőleges technológiai rendszer Mi a cél? üzemeltetés az előírt tevékenység elvégzése (termék előállítása,
Az irányítástechnika alapfogalmai 2014. 02. 08. Folyamatirányítás - bevezetés Legyen adott egy tetszőleges technológiai rendszer Mi a cél? üzemeltetés az előírt tevékenység elvégzése (termék előállítása,
Történeti Áttekintés
 Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Irányítástechnika 2. előadás
 Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Irányítástechnika 12. évfolyam
 Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Szabályozás Irányítástechnika PE MIK MI BSc 1
 Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN. 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1
 DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
IRÁNYÍTÁSTECHNIKAI ALAPOK. Erdei István Grundfos South East Europe Kft.
 IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
Irányítástechnika II. előadásvázlat
 Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Irányítástechnika Elıadás. Zárt szabályozási körök stabilitása
 Irányítástechnika 2 7. Elıadás Zárt szabályozási körök stabilitása Irodalom - Csáki Frigyes, Bars Ruth: Automatika.1974 - Mórocz István: Irányítástechnika I. Analóg szabályozástechnika. 1996 - Benjamin
Irányítástechnika 2 7. Elıadás Zárt szabályozási körök stabilitása Irodalom - Csáki Frigyes, Bars Ruth: Automatika.1974 - Mórocz István: Irányítástechnika I. Analóg szabályozástechnika. 1996 - Benjamin
Mechatronika alapjai órai jegyzet
 - 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
- 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból
 Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
ÍRÁSBELI FELADAT MEGOLDÁSA
 54 523 01 0000 00 00-2013 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT MEGOLDÁSA Szakképesítés: 54 523 01 0000 00 00 SZVK rendelet száma: Modulok: 0919-06/2
54 523 01 0000 00 00-2013 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT MEGOLDÁSA Szakképesítés: 54 523 01 0000 00 00 SZVK rendelet száma: Modulok: 0919-06/2
Építőelemek összessége (eszköz, berendezés, módszer, művelet), mellyel az irányító berendezések megtervezhetők.
, mellyel az irányító berendezések megtervezhetők.") Márkus Zsolt markus.zsolt@qos.hu Az irányítástechnika (automatika) az önműködő irányítás törvényszerűségeivel, és a gyakorlati megvalósításlehetőségeivel foglalkozik. Építőelemek összessége (eszköz, berendezés,
Márkus Zsolt markus.zsolt@qos.hu Az irányítástechnika (automatika) az önműködő irányítás törvényszerűségeivel, és a gyakorlati megvalósításlehetőségeivel foglalkozik. Építőelemek összessége (eszköz, berendezés,
MECHATRONIKA Mechatronika alapképzési szak (BSc) záróvizsga kérdései. (Javítás dátuma: )
 záróvizsga kérdései. (Javítás dátuma: )") MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
FOLYAMATIRÁNYÍTÁSI RENDSZEREK
 Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Szakképesítés: 54 523 01 Automatikai technikus Szóbeli vizsgatevékenység A vizsgafeladat megnevezése: Irányítástechnikai alapok, gyártórendszerek
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Hurokegyenlet alakja, ha az áram irányával megegyező feszültségeséseket tekintjük pozitívnak:
 Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Számítógépes gyakorlat Irányítási rendszerek szintézise
 Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Márkus Zsolt Tulajdonságok, jelleggörbék, stb BMF -
 Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Irányítástechnika alapvetı célja
 Irányítástechnika alapvetı célja Folyamat Tevékenység Forgalom Termelékenység Biztonság, Egyenletesség, Változások követése, Termék növelése minıségének javítása Az energia felhasználás csökkentése Az
Irányítástechnika alapvetı célja Folyamat Tevékenység Forgalom Termelékenység Biztonság, Egyenletesség, Változások követése, Termék növelése minıségének javítása Az energia felhasználás csökkentése Az
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata.
 1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra
 SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra") Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Irányítástechnika. II. rész. Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu
 Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Szabályozástechnika II.
 TÁMOP-4.1.1.F-14/1/KONV-215-9 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika II. Pécs 215 A tananyag
TÁMOP-4.1.1.F-14/1/KONV-215-9 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika II. Pécs 215 A tananyag
ÁGAZATI SZAKMAI ÉRETTSÉGI VIZSGA VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK
 VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
Irányítási alapok. Készítette: Maczik Mihály András. (tanulási útmutató. 2. kiadás) Békéscsaba 2016.
 Békéscsaba 2016.") Irányítási alapok (tanulási útmutató. 2. kiadás) Készítette: Maczik Mihály András Békéscsaba 2016. Tartalomjegyzék 1 Az irányítástechnika... 1 1.1 Az irányítás fogalma...1 1.2 Az irányítás csoportosítása
Irányítási alapok (tanulási útmutató. 2. kiadás) Készítette: Maczik Mihály András Békéscsaba 2016. Tartalomjegyzék 1 Az irányítástechnika... 1 1.1 Az irányítás fogalma...1 1.2 Az irányítás csoportosítása
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 4. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 4. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Folyamatirányítás. Számítási gyakorlatok. Gyakorlaton megoldandó feladatok. Készítette: Dr. Farkas Tivadar
 Folyamatirányítás Számítási gyakorlatok Gyakorlaton megoldandó feladatok Készítette: Dr. Farkas Tivadar 2010 I.-II. RENDŰ TAGOK 1. feladat Egy tökéletesen kevert, nyitott tartályban folyamatosan meleg
Folyamatirányítás Számítási gyakorlatok Gyakorlaton megoldandó feladatok Készítette: Dr. Farkas Tivadar 2010 I.-II. RENDŰ TAGOK 1. feladat Egy tökéletesen kevert, nyitott tartályban folyamatosan meleg
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 01 Automatikai technikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III. 28.) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 01 Automatikai technikus
Négypólusok tárgyalása Laplace transzformációval
 Négypólusok tárgyalása Laplace transzformációval Segédlet az Elektrotechnika II. c. tantárgyhoz Összeállította: Dr. Kurutz Károly egyetemi tanár Szászi István egyetemi tanársegéd . Laplace transzformáció
Négypólusok tárgyalása Laplace transzformációval Segédlet az Elektrotechnika II. c. tantárgyhoz Összeállította: Dr. Kurutz Károly egyetemi tanár Szászi István egyetemi tanársegéd . Laplace transzformáció
Mintavétel: szorzás az idő tartományban
 1 Mintavételi törvény AD átalakítók + sávlimitált jel τ időközönként mintavétel Mintavétel: szorzás az idő tartományban 1/τ körfrekvenciánként ismétlődik - konvolúció a frekvenciatérben. 2 Nem fednek át:
1 Mintavételi törvény AD átalakítók + sávlimitált jel τ időközönként mintavétel Mintavétel: szorzás az idő tartományban 1/τ körfrekvenciánként ismétlődik - konvolúció a frekvenciatérben. 2 Nem fednek át:
Irányítástechnika labor Elméleti összefoglaló
 Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Jelek és rendszerek - 4.előadás
 Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Irányítástechnikai alapok. Zalotay Péter főiskolai docens KKMF
 Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
Irányítástechnikai alapok Zalotay Péter főiskolai docens KKMF Az irányítás feladatai és fajtái: Alapfogalmak Irányítás: Műszaki berendezések ( gépek, gyártó sorok, szállító eszközök, vegyi-, hő-technikai
L-transzformáltja: G(s) = L{g(t)}.
 = L{g(t)}.") Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 3. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 3. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
LÉTRADIAGRAM FORDÍTÓK ELMÉLETE PLC VEZÉRLÉSEK SZÁMÁRA II.
 V. Évfolyam 1. szám - 2010. március Deák Ferenc deak@nct.hu LÉTRADIAGRAM FORDÍTÓK ELMÉLETE PLC VEZÉRLÉSEK SZÁMÁRA II. Absztrakt A létradiagram egyszerű, programozási képzettséggel nem rendelkező szakemberek
V. Évfolyam 1. szám - 2010. március Deák Ferenc deak@nct.hu LÉTRADIAGRAM FORDÍTÓK ELMÉLETE PLC VEZÉRLÉSEK SZÁMÁRA II. Absztrakt A létradiagram egyszerű, programozási képzettséggel nem rendelkező szakemberek
Dr. Gyurcsek István. Példafeladatok. Helygörbék Bode-diagramok HELYGÖRBÉK, BODE-DIAGRAMOK DR. GYURCSEK ISTVÁN
 Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Tartalom. 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció)
") Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
IRÁNYÍTÁSTECHNIKAI ALAPFOGALMAK, VEZÉRLŐBERENDEZÉSEK FEJLŐDÉSE, PLC-GENERÁCIÓK
 IRÁNYÍTÁSTECHNIKAI ALAPFOGALMAK, VEZÉRLŐBERENDEZÉSEK FEJLŐDÉSE, PLC-GENERÁCIÓK Irányítástechnika Az irányítás olyan művelet, mely beavatkozik valamely műszaki folyamatba annak: létrehozása (elindítása)
IRÁNYÍTÁSTECHNIKAI ALAPFOGALMAK, VEZÉRLŐBERENDEZÉSEK FEJLŐDÉSE, PLC-GENERÁCIÓK Irányítástechnika Az irányítás olyan művelet, mely beavatkozik valamely műszaki folyamatba annak: létrehozása (elindítása)
ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK
 6203-11 modul ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK I. rész ÉPÜLETGÉPÉSZETI ELEKTROMOS SZERELÉSEK II. RÉSZ VEZÉRLÉS ÉS SZABÁLYOZÁSTECHNIKA TARTALOMJEGYZÉKE Szerkesztette: I. Rész: Tolnai
6203-11 modul ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK I. rész ÉPÜLETGÉPÉSZETI ELEKTROMOS SZERELÉSEK II. RÉSZ VEZÉRLÉS ÉS SZABÁLYOZÁSTECHNIKA TARTALOMJEGYZÉKE Szerkesztette: I. Rész: Tolnai
KÍSÉRLET, MÉRÉS, MŰSZERES MÉRÉS
 KÍSÉRLET, MÉRÉS, MŰSZERES MÉRÉS Kísérlet, mérés, modellalkotás Modell: olyan fizikai vagy szellemi (tudati) alkotás, amely egy adott jelenség lefolyását vagy egy rendszer viselkedését részben vagy egészen
KÍSÉRLET, MÉRÉS, MŰSZERES MÉRÉS Kísérlet, mérés, modellalkotás Modell: olyan fizikai vagy szellemi (tudati) alkotás, amely egy adott jelenség lefolyását vagy egy rendszer viselkedését részben vagy egészen
ACS-1000 Ipari analóg szabályozó rendszer
 ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
PTE PMMFK Levelező-távoktatás, villamosmérnök szak
 PTE PMMFK Levelező-távoktatás, villamosmérnök szak MATEMATIKA (A tantárgy tartalma és a tananyag elsajátításának időterve.) Összeállította: Kis Miklós adjunktus Tankönyvek Megegyeznek az 1. és 2. félévben
PTE PMMFK Levelező-távoktatás, villamosmérnök szak MATEMATIKA (A tantárgy tartalma és a tananyag elsajátításának időterve.) Összeállította: Kis Miklós adjunktus Tankönyvek Megegyeznek az 1. és 2. félévben
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás Jelen gyűjtő munkát készítette Fölföldi Konrád,
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás Jelen gyűjtő munkát készítette Fölföldi Konrád,
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Mátrix-exponens, Laplace transzformáció
 2016. április 4. 2016. április 11. LINEÁRIS DIFFERENCIÁLEGYENLET RENDSZEREK ÉS A MÁTRIX-EXPONENS KAPCSOLATA Feladat - ismétlés Tegyük fel, hogy A(t) = (a ik (t)), i, k = 1,..., n és b(t) folytonos mátrix-függvények
2016. április 4. 2016. április 11. LINEÁRIS DIFFERENCIÁLEGYENLET RENDSZEREK ÉS A MÁTRIX-EXPONENS KAPCSOLATA Feladat - ismétlés Tegyük fel, hogy A(t) = (a ik (t)), i, k = 1,..., n és b(t) folytonos mátrix-függvények
Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz
 Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz 1. Hogyan lehet osztályozni a jeleket időfüggvényük időtartama szerint? 2. Mi a periodikus jelek definiciója? (szöveg, képlet, 3. Milyen
Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz 1. Hogyan lehet osztályozni a jeleket időfüggvényük időtartama szerint? 2. Mi a periodikus jelek definiciója? (szöveg, képlet, 3. Milyen
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
PILÓTANÉLKÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNEK ELŐZETES MÉRETEZÉSE. Bevezetés. 1. Időtartománybeli szabályozótervezési módszerek
 Szabolcsi Róbert Szegedi Péter PILÓTANÉLÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNE ELŐZETES MÉRETEZÉSE Bevezetés A cikkben a Szojka III pilótanélküli repülőgép [8] szakirodalomban rendelkezésre álló matematikai
Szabolcsi Róbert Szegedi Péter PILÓTANÉLÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNE ELŐZETES MÉRETEZÉSE Bevezetés A cikkben a Szojka III pilótanélküli repülőgép [8] szakirodalomban rendelkezésre álló matematikai
Alapfogalmak/szabályozás-beavatkozás (1)
") IRÁNYÍTÁSELMÉLET ÉS TECHNIKA Energetikai mérnökasszisztens FSz Szak 4. félév 1 Alapfogalmak/szabályozás-beavatkozás (1) Irányítás: olyan művelet, amely valamilyen műszaki folyamatba annak elindítása, fenntartása,
IRÁNYÍTÁSELMÉLET ÉS TECHNIKA Energetikai mérnökasszisztens FSz Szak 4. félév 1 Alapfogalmak/szabályozás-beavatkozás (1) Irányítás: olyan művelet, amely valamilyen műszaki folyamatba annak elindítása, fenntartása,
A nullád rendű tartóáramkör átviteli függvényének alakulása, ha a tartási időszakban a lezárás nem veszteségmentes
 A nullád rendű tartóáramkör átviteli függvényének alakulása, ha a tartási időszakban a lezárás nem veszteségmentes VÖRÖS ANDRÁS Műszeripari Kutatóintézet Az alábbiakban vizsgálat tárgyává tesszük azt az
A nullád rendű tartóáramkör átviteli függvényének alakulása, ha a tartási időszakban a lezárás nem veszteségmentes VÖRÖS ANDRÁS Műszeripari Kutatóintézet Az alábbiakban vizsgálat tárgyává tesszük azt az
DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN. 2003.11.06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1
 DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN 2003..06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet Egy bemenetű, egy kimenetű rendszer u(t) diff. egyenlet v(t) zárt alakban n-edrendű diff. egyenlet
DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN 2003..06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet Egy bemenetű, egy kimenetű rendszer u(t) diff. egyenlet v(t) zárt alakban n-edrendű diff. egyenlet
Villamosságtan szigorlati tételek
 Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
Az egységugrás függvény a 0 időpillanatot követően 10 nagyságú jelet ad, valamint K=2. Vizsgáljuk meg a kimenetet:
 II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
Irányítástechnika. Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu
 Irányítástechnika Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Bevezető A tárgy célja Irányítástechnikai alapfogalmak alapismeretek módszerek megismertetése Irányítási rendszerek működésének megértéséhez,
Irányítástechnika Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Bevezető A tárgy célja Irányítástechnikai alapfogalmak alapismeretek módszerek megismertetése Irányítási rendszerek működésének megértéséhez,
2. Folytonos lineáris rendszerek leírása az id!-, az operátor- és a frekvenciatartományban
 Önellen!rz! kérdések 1. Bevezetés 1. Ismertessen néhány tipikus irányítási feladatot! 2. Definiálja az irányítás m!veletét, ismertesse a kézi és automatikus irányítás közötti különbséget! 3. Ismertesse
Önellen!rz! kérdések 1. Bevezetés 1. Ismertessen néhány tipikus irányítási feladatot! 2. Definiálja az irányítás m!veletét, ismertesse a kézi és automatikus irányítás közötti különbséget! 3. Ismertesse
HCE80/HCC80/HCE80R/HCC80R
 HCE80/HCC80/HCE80R/HCC80R PADLÓFŰTÉSI ZÓNA SZABÁLYZÓK TERMÉK LEÍRÁS TULAJDONSÁGOK Könnyű és gyors telepítés az új vezetékezéssel Dugaszolható csatlakozók kábelszorítóval Integrált szivattyú relé a szivattyú
HCE80/HCC80/HCE80R/HCC80R PADLÓFŰTÉSI ZÓNA SZABÁLYZÓK TERMÉK LEÍRÁS TULAJDONSÁGOK Könnyű és gyors telepítés az új vezetékezéssel Dugaszolható csatlakozók kábelszorítóval Integrált szivattyú relé a szivattyú
Elektronika 11. évfolyam
 Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Jelek és rendszerek 1. 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék
 Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
IRÁNYÍTÁSTECHNIKA II.
 IRÁNYÍTÁSTECHNIKA II. A projekt címe: Egységesített Jármű- és mobilgépek képzés- és tananyagfejlesztés A megvalósítás érdekében létrehozott konzorcium résztvevői: KECSKEMÉTI FŐISKOLA BUDAPESTI MŰSZAKI
IRÁNYÍTÁSTECHNIKA II. A projekt címe: Egységesített Jármű- és mobilgépek képzés- és tananyagfejlesztés A megvalósítás érdekében létrehozott konzorcium résztvevői: KECSKEMÉTI FŐISKOLA BUDAPESTI MŰSZAKI
Mechatronika II (BMEGEFOAMM2)
") Mechatronika II (BMEGEFOAMM2) Első gyakorlat Készítette: Raj Levente Tartalom Bevezetés... 3 Jelölések... 3 101 Egységugrás bemenetre adott válaszfüggvény (időfüggvény) meghatározása... 4 Feladatleírás...
Mechatronika II (BMEGEFOAMM2) Első gyakorlat Készítette: Raj Levente Tartalom Bevezetés... 3 Jelölések... 3 101 Egységugrás bemenetre adott válaszfüggvény (időfüggvény) meghatározása... 4 Feladatleírás...
Oktatási feladat: Értse az összetett technikai rendszerek fogalmát, működését.
 ÓRATERVEZET 2 A tanítás helye: A tanítás ideje: A tanítás osztálya: 8. osztály + szakkör Tanít: Tanítási egység: Technika - Irányítástechnika A tanítási óra anyaga: Vezérlés, szabályozás Oktatási feladat:
ÓRATERVEZET 2 A tanítás helye: A tanítás ideje: A tanítás osztálya: 8. osztály + szakkör Tanít: Tanítási egység: Technika - Irányítástechnika A tanítási óra anyaga: Vezérlés, szabályozás Oktatási feladat:
Szabályozástechnika I.
 TÁMOP-4.1.1.F-14/1/KONV-2015-0009 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika I. Pécs 2015
TÁMOP-4.1.1.F-14/1/KONV-2015-0009 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika I. Pécs 2015
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
2.A Témakör: A villamos áram hatásai Téma: Elektromos áram hatásai vegyi hatás hőhatás élettani hatás
 1.A Témakör: A villamos áramkör részei Téma: Villamosságtani alapfogalmak elektromos áram Értelmezze az elektromos áram mértékegységét! elektromos feszültség elektromos teljesítmény elektromos munka elektromos
1.A Témakör: A villamos áramkör részei Téma: Villamosságtani alapfogalmak elektromos áram Értelmezze az elektromos áram mértékegységét! elektromos feszültség elektromos teljesítmény elektromos munka elektromos
Bevezetés. Rendszer- és irányításelmélet
 Bevezetés Könyvünk az irányításelmélet és az irányítástervezés, valamint a megvalósítás kérdéseivel foglalkozik. Az elméleti és módszertani kérdéseken túl kiemelt alkalmazási területként a földi és légi
Bevezetés Könyvünk az irányításelmélet és az irányítástervezés, valamint a megvalósítás kérdéseivel foglalkozik. Az elméleti és módszertani kérdéseken túl kiemelt alkalmazási területként a földi és légi
Elektronika Előadás. Műveleti erősítők táplálása, alkalmazása, alapkapcsolások
 Elektronika 2 2. Előadás Műveleti erősítők táplálása, alkalmazása, alapkapcsolások Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
Elektronika 2 2. Előadás Műveleti erősítők táplálása, alkalmazása, alapkapcsolások Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
Számítógép-vezérelt szabályozás- és irányításelmélet
 Számítógép-vezérelt szabályozás- és irányításelmélet 2. gyakorlat Feladattípusok két függvény konvolúciója ÿ + aẏ + by = e at, y(), ẏ() típusú kezdetiérték feladatok megoldása (Laplace transzformációval)
Számítógép-vezérelt szabályozás- és irányításelmélet 2. gyakorlat Feladattípusok két függvény konvolúciója ÿ + aẏ + by = e at, y(), ẏ() típusú kezdetiérték feladatok megoldása (Laplace transzformációval)
Bevezetés a méréstechnikába és jelfeldolgozásba 7. mérés RC tag Bartha András, Dobránszky Márk
 Bevezetés a méréstechnikába és jelfeldolgozásba 7. mérés 2015.05.13. RC tag Bartha András, Dobránszky Márk 1. Tanulmányozza át az ELVIS rendszer rövid leírását! Áttanulmányoztuk. 2. Húzzon a tartóból két
Bevezetés a méréstechnikába és jelfeldolgozásba 7. mérés 2015.05.13. RC tag Bartha András, Dobránszky Márk 1. Tanulmányozza át az ELVIS rendszer rövid leírását! Áttanulmányoztuk. 2. Húzzon a tartóból két
FOLYAMATIRÁNYÍTÁSI RENDSZEREK
 Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
Jelkondicionálás. Elvezetés. a bioelektromos jelek kis amplitúdójúak. extracelluláris spike: néhányszor 10 uv. EEG hajas fejbőrről: max 50 uv
 Jelkondicionálás Elvezetés 2/12 a bioelektromos jelek kis amplitúdójúak extracelluláris spike: néhányszor 10 uv EEG hajas fejbőrről: max 50 uv EKG: 1 mv membránpotenciál: max. 100 mv az amplitúdó növelésére,
Jelkondicionálás Elvezetés 2/12 a bioelektromos jelek kis amplitúdójúak extracelluláris spike: néhányszor 10 uv EEG hajas fejbőrről: max 50 uv EKG: 1 mv membránpotenciál: max. 100 mv az amplitúdó növelésére,
25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel.
 25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel. A gerjesztı jelek hálózatba történı be- vagy kikapcsolása után átmeneti (tranziens) jelenség játszódik le. Az állandósult (stacionárius)
25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel. A gerjesztı jelek hálózatba történı be- vagy kikapcsolása után átmeneti (tranziens) jelenség játszódik le. Az állandósult (stacionárius)
A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA. 2006. április 28. 2006.04.24. 1
 A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA 2006. április 28. 2006.04.24. 1 MIÉRT VAN SZÜKSÉG HIDRAULIKAI BESZABÁLYOZÁSRA? HIDRAULIKAI RENDSZEREK HELYES MŰKÖDÉSÉNEK ALAPFELTÉTELEI 1. A TERVEZETT
A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA 2006. április 28. 2006.04.24. 1 MIÉRT VAN SZÜKSÉG HIDRAULIKAI BESZABÁLYOZÁSRA? HIDRAULIKAI RENDSZEREK HELYES MŰKÖDÉSÉNEK ALAPFELTÉTELEI 1. A TERVEZETT
1. Irányítástechnika. Készítette: Fecser Nikolett. 2. Ipari elektronika. Készítette: Horváth Lászó
 A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny. Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR
 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR Szakképesítés: SZVK rendelet száma: Komplex írásbeli: Számolási, áramköri, tervezési feladatok
MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR Szakképesítés: SZVK rendelet száma: Komplex írásbeli: Számolási, áramköri, tervezési feladatok
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
Tartalom. Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás
 Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Bevezetés az állapottér elméletbe: Állapottér reprezentációk
 Tartalom Bevezetés az állapottér elméletbe: Állapottér reprezentációk vizsgálata 1. Példa az állapottér reprezentációk megválasztására 2. Átviteli függvény és állapottér reprezentációk közötti kapcsolatok
Tartalom Bevezetés az állapottér elméletbe: Állapottér reprezentációk vizsgálata 1. Példa az állapottér reprezentációk megválasztására 2. Átviteli függvény és állapottér reprezentációk közötti kapcsolatok
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8.
 8.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A ROBOTPILÓTÁK IRÁNYÍTÁSTECHNIKAI MINŐSÉGI KÖVETELMÉNYEI
 Dr. Szegedi Péter PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A cikkben a Szojka-III pilóta nélküli repülőgép repülésmechanikai matematikai modelljei vizsgálatainak eredményeit
Dr. Szegedi Péter PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A cikkben a Szojka-III pilóta nélküli repülőgép repülésmechanikai matematikai modelljei vizsgálatainak eredményeit
Analóg-digitális átalakítás. Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék
 Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny. Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR MEGOLDÁSA
 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR MEGOLDÁSA Szakképesítés: SZVK rendelet száma: Komplex írásbeli: Számolási, áramköri, tervezési
MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR MEGOLDÁSA Szakképesítés: SZVK rendelet száma: Komplex írásbeli: Számolási, áramköri, tervezési