ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
|
|
|
- Boglárka Dobos
- 5 évvel ezelőtt
- Látták:
Átírás
1 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR /2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG
2 DC motor szabályozás Kiindulási alap: a DC motor dinamikus modellje a motor kapocsfeszültsége és forgási körfrekvenciája közti átviteli függvény Ω s = k m 2 R r μ m + k 1 m 1 + J V rr r + L r μ m 2 R r μ m + k s + J r L r r 2 m R r μ m + k s2 m s W ω s = k m 2 R r μ m + k 1 m 1 + J rr r + L r μ m 2 R r μ m + k s + J r L r 2 m R r μ m + k s2 m W ω = G bs + as 2 2
 ω")
3 DC motor szabályozás Fordulatszám szabályozás ω s + C v r W ω (s) ω 3


 α s + v C r ω W ω (s)")
4 DC motor szabályozás Szervo szabályozás cél: a kimeneti tengely valamilyen szögbe állítása, szög tartása / követése Áttétel és szögmérés (példa) α s + v C r ω W ω (s) K g 1 s α 4
5 Rendszerek összekapcsolása X(s) W 1 (s) W 2 (s) W(s) Y(s) Soros kapcsolás W s = W 1 s W 2 s W 1 s W 2 s = W 2 s W 1 s X(s) W 1 (s) W 2 (s) W(s) + + kommutatív művelet Párhuzamos kapcsolás Y(s) W s = W 1 s +W 2 s kommutatív művelet a szorzással disztributivitás 5
6 Rendszerek összekapcsolása W(s) X(s) W 1 (s) Y(s) + - Visszacsatolás Y s = W 1 s X s W 2 s Y s Y s 1 + W 1 s W 2 s = W 1 s X s W 2 (s) W s = X s Y s = W 1 s 1 + W 1 s W 2 s X(s) W 2 (s) W 1 (s) Y(s) + W(s) Y s = W 1 s W 1 s X s Y s - Y s 1 + W 1 s W 2 s = W 1 s X s W s = W 1 s W 2 s 1 + W 1 s W 2 s 6

7 DC motor fordulatszám-szabályozás Arányos szabályozás: konstans C erősítés ω s + C v r W ω (s) ω W ω s 1 = G 1 + bs + as 2 W c s = CW 1 ω s CG 1 + CW ω s = 1 + bs + as 2 = bs + as 2 CG W c s = CG 1 + CG b a s CG 1 + CG s2 CG 1 + CG + bs + as 2 G 1 statikus erősítési hiba lép fel Megváltozott vágási körfrekvencia és csillapítás pólusok eltolódnak. 7
8 Arányos fordulatszám-szabályozás W c s = W c s = k C m 2 R r μ m + k m k 1 + C m 2 R r μ m + k m Ck m R r μ m + k m 2 +Ck m J r R r + L r μ m 2 R 1 + r μ m + k m k 1 + C m 2 R r μ m + k m 1 + J rr r + L r μ m R r μ m + k m 2 +Ck m s + 1 J r L r 2 R s + r μ m + k m k 1 + C m 2 R r μ m + k m 1 s 2 J r R r R r μ m + k m 2 +Ck m s 2 G = k m R r μ m + k m 2 G = Ck m R r μ m + k 2 m +Ck m a = J r R r R r μ m + k m 2 a = J r R r R r μ m + k 2 m +Ck m b = J rr r + L r μ m R r μ m + k m 2 b = J rr r + L r μ m R r μ m + k m 2 +Ck m 8
9 Arányos fordulatszám-szabályozás Szabályozó tervezés: C erősítés meghatározása Kritériumok: Stabilitás Statikus hiba legyen minél kisebb A beállás legyen minél gyorsabb Túllövés, periodikus/aperiodikus beállás (ténye, mértéke) Az alkalmazás dönti el, hogy túllövés, periodicitás megengedhető-e, illetve milyen mértékű lehet. A fenti kritériumok maximális mértékben egyszerre általában nem teljesíthetők, kompromisszumos megoldást kell választanunk. 9
10 Arányos fordulatszám-szabályozás Stabilitás, beállási tulajdonságok: fázistartalék Stabilitás fennáll, ha a rendszer fázistolása kisebb, mint 180 mindenütt, ahol a körerősítés nagyobb, mint 1 (0 bb). Fázistartalék: A fázis eltérése 180 -tól azon a ponton, ahol a körerősítés egyenlő 1-gyel (0 bb). Minél kisebb a fázistartalék, annál jobban közelít a rendszer a stabilitás határához, a rendszernek annál nagyobb túllövése van, illetve a periodikus beállás amplitúdója annál nagyobb (annál nagyobb lengéseket végez). 10
11 Arányos fordulatszám-szabályozás A fázistartalék túllövés összefüggés másodrendű aluláteresztő stabil rendszerre (táblázatos forma): Fázistartalék Túllövés % Másodrendű rendszerre analitikus összefüggésekkel pontosan számítható. Fázistartalék (FT) Phase Margin (PM, PHM) Felfutási idő: ugrásjel gerjesztésre a végérték 10 és 90 %-ának elérése közt eltelt idő, a következőkben T UP. 11
12 Arányos fordulatszám-szabályozás Statikus hiba: G = 1 CG 1 + CG G < 1 1-től való eltérés: a statikus hiba G 1 = 1 + CG CG statikus körerősítés CG CG körerősítés minél nagyobb, a statikus hiba annál kisebb, és G = 0 ha CG C növelése rontja a stabilitást csökkenti a fázistartalékot. 12


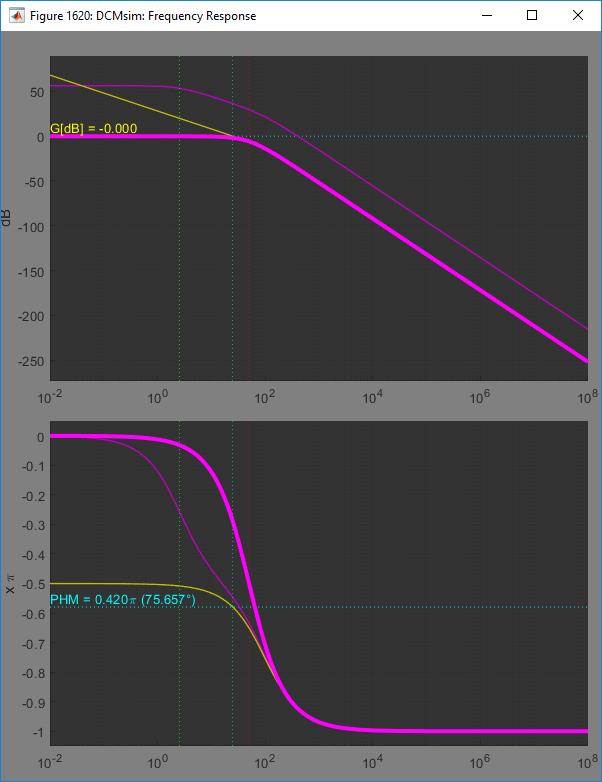
13 A motor nyílthurkú átvitele Pólus-zérus térkép Bode-diagramm 13
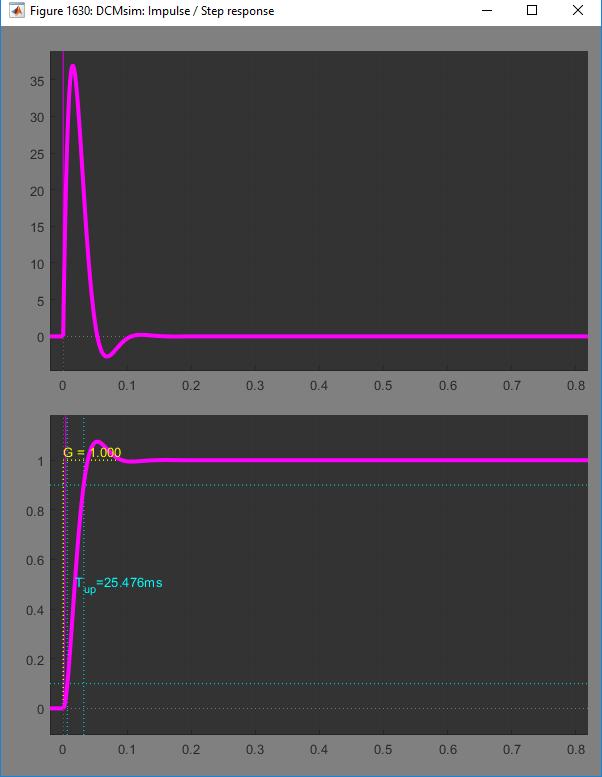
 Egységugrás válasz (átmeneti")
14 A motor nyílthurkú átvitele Impulzusválasz (súlyfüggvény) Egységugrás válasz (átmeneti függvény) 14
15 Arányos fordulatszám-szabályozás C = 0.01 G = Eredeti rendszer pólusai Zárt rendszer pólusai 15
16 Arányos fordulatszám-szabályozás C = 0.01 G =

17 Arányos fordulatszám-szabályozás C = 0.02 G = Eredeti rendszer pólusai Zárt rendszer pólusai 17
18 Arányos fordulatszám-szabályozás C = 0.02 G =

19 Arányos fordulatszám-szabályozás C = 0.04 G = Eredeti rendszer pólusai Zárt rendszer pólusai 19

20 Arányos fordulatszám-szabályozás C = 0.04 G =

21 Arányos fordulatszám-szabályozás C = 0.40 G = Eredeti rendszer pólusai Zárt rendszer pólusai 21

22 Arányos fordulatszám-szabályozás C = 0.40 G =
23 Egy gyakori szabályozó típus: PID PID szabályozó Arányos (Proporcionális), Integráló, Differenciáló y t d = A x t + T D dt x t + 1 t x τ d T I τ P arányos erősítés T D differenciálási időállandó T I integrálási időállandó Átviteli függvény W PID s = A 1 + T D s + 1 T I s PI szabályozó W PI s = A T I s = A T I 1 + T I s s (folytonos idejű szabályozók) 23
24 DC motor PI fordulatszám-szabályozás PI szabályozás W C s = W PI s W ω s 1 + W PI s W ω s = A 1 + T I s T I s 1 + A 1 + T Is T I s G 1 + bs + as 2 G 1 + bs + as 2 W C s = AG 1 + T I s 1 + bs + as 2 T I s + AG 1 + T I s W C s = AG AG 1 + T I s T Is + b AG T Is 2 + a AG T Is 3 Gain = 1 statikus erősítési hiba nincs Harmadrendű rendszer Van zérusa is 24
25 DC motor PI fordulatszám-szabályozás PI szabályozás W ω s = G p 1 p 2 s p 1 s p 2 W C s = W PI s W ω s 1 + W PI s W ω s = W C s = W ω s alternatív felírási módja: p 1, p 1 a rendszer pólusai s p 1 A 1 + T I s T I s 1 + A 1 + T Is T I s p 1 p 2 AG 1 + T I s s p 2 T I s + p 1 p 2 AG 1 + T I s p 1 p 2 G s p 1 s p 2 p 1 p 2 G s p 1 s p 2 W C s = W C s = s p 1 s p 2 p 1 p 2 AG 1 + T I s T I s + AG 1 + T I s AG 1 + T I s 1 s p 1 1 s p 2 T I s + AG 1 + T I s 25
26 DC motor PI fordulatszám-szabályozás PI szabályozás W C s = AG 1 + T I s 1 s p 1 1 s p 2 T I s + AG 1 + T I s Válasszuk meg T I -t olyan módon, hogy egyszerűsíteni lehessen a 1 + T I s tényezővel. Ez teljesül, ha a pólusok valósak és azaz 1 + T I s = 1 s p 1 vagy 1 + T I s = 1 s p 2 T I = 1 p 1 vagy T I = 1 p 2 26
27 DC motor PI fordulatszám-szabályozás W C s = AG 1 + T I s 1 s p 1 1 s p 2 T I s + AG 1 + T I s és legyen T I = 1 p 1 W C s = AG 1 s p 1 1 s p 1 1 s p 2 T I s + AG 1 s p 1 = AG 1 s p 2 T I s + AG W C s = T I AG s T I p 2 AG s2 W C s = T I AG s T I p 1 AG s2 A zárthurkú rendszer másodrendű, pólusai könnyen kiszámíthatók. 27
28 DC motor PI fordulatszám-szabályozás Az eljárás neve: pólus-zérus törlés (pole-zero cancellation). A másik pólusra elvégezve hasonló eredményt kapunk, azaz p 1, p 2 pólusokra sorra W C s = T I AG s T W C s = I p 2 AG s T I AG s T I p 1 AG s2 Melyik pólusra célszerű alkalmazni az eljárást? A szabályozás egyik követelménye a gyors beállás. Ennek érdekében jó stratégia a leglassúbb pólus törlése. 28
29 DC motor PI fordulatszám-szabályozás A beállási idő és a pólus helyének összefüggése: Elsőrendű stabil rendszer (valós pólus) W s = Ts p = 1 T T időállandó v t = 1 e t T egységugrásra adott válasz Minél nagyobb T időállandó, a beállás annál lassúbb. p pólus abszolút értéke minél kisebb, a beállás annál lassúbb. p pólus minél közelebb van az origóhoz (az imaginárius tengelyhez), a beállás annál lassúbb. 29
30 DC motor PI fordulatszám-szabályozás W ω s = G p 1 p 2 s p 1 s p 2 W ω s = G bs + as 2 G = a = k m R r μ m + k m 2 J r R r R r μ m + k m 2 b = J rr r + L r μ m R r μ m + k m 2 > 0 as 2 + bs + 1 = 0 p 1,2 = b ± b2 4a 2a p 1 = b b2 4a < 0 2a p 2 = b b2 4a < 0 2a b 2 > 4a valós pólusok b b 2 4a > 0 b 2 > b 2 4a 0 > 4a p 1 < p 2 p 1 > p 2 p 2 pólus közelebb van az origóhoz (az imaginárius tengelyhez), p 2 a lassú pólus. 30
31 DC motor PI fordulatszám-szabályozás A pólus-zérus törléssel egyszerűsített visszacsatolt rendszerben egy szabad paraméter marad: az A arányos erősítési tényező. A meghatározása azonos elvek alapján, mint az arányos szabályozás esetén: A kívánt beállási jelleg (túllövés, periodicitás) alapján megfelelő fázistartalék beállítása. Nem kell foglalkoznunk a statikus hibával: A szabályozó integráló jellege miatt (1-es típusú rendszer) a statikus hiba 0. 31
 A = 0.")
32 DC motor PI fordulatszám-szabályozás Példa: abs p 1 = lassú pólus abs p 2 = T I = 1 abs p s T I = ms (beállítás) A = (ad-hoc beállítás) Eredeti rendszer pólusai Zárt rendszer zérusai Zárt rendszer pólusai Szabályozó pólusai Szabályozó zérusai 32
33 DC motor PI fordulatszám-szabályozás 33
34 DC motor PI fordulatszám-szabályozás T I = ms A = Eredeti rendszer pólusai Zárt rendszer zérusai Zárt rendszer pólusai Szabályozó pólusai Szabályozó zérusai 34

35 DC motor PI fordulatszám-szabályozás 35
36 DC motor PI fordulatszám-szabályozás T I = ms A = 0.15 Eredeti rendszer pólusai Zárt rendszer zérusai Zárt rendszer pólusai Szabályozó pólusai Szabályozó zérusai 36
37 DC motor PI fordulatszám-szabályozás 37
38 PID szabályozás digitális megvalósítása y t = A x t + T D dx t dt + 1 t x τ dτ T I Diszkretizálás y k = A x k + T D x k x k 1 T k + T T I x j j= T D T = τ D T T I = 1 τ I y k = A x k + τ D x k x k τ I x j k j= Diszkrét PID szabályozó 38
39 PID szabályozás digitális megvalósítása y k = A x k + τ D x k x k τ I x j k j= k 1 Rekurzív forma y k 1 = A x k 1 + τ D x k 1 x k τ I x j j= y k y k 1 = A x k + x k 1 + τ D x k 2x k 1 + x k 2 + x k τ I y k = y k 1 + A 1 + τ D + 1 τ I x k + x k τ D x k 1 + τ D x k 2 Rekurzív PI szabályozó y k = y k 1 + A τ I x k x k 1 39
40 PID szabályozás digitális megvalósítása PI szabályozó realizálása y k = y k 1 + A τ I x k x k 1 A jelen időponthoz tartozó számított irányító jel Az irányító jel előző mintavételi időponthoz tartozó értéke Az ellenőrző jel jelen időponthoz tartozó értéke alapjel és mért kimeneti jel különbsége Az előző mintavételi időponthoz tartozó ellenőrző jel érték Numerikus értékek a mérés elvégzésével rendelkezésre állnak, a számítás minden ciklusban elvégezhető. 40
41 PID szabályozás digitális megvalósítása Realizálási problémák Windup jelenség az integrátor kimenete extrém nagy értékeket vehet fel, amelyek nem adhatók ki kimeneti jelként. Megoldás: Ha a kimeneti jel telítődik, a változások nem jutnak érvényre a visszacsatolt szabályozási kör felszakad. Felismerni a windup jelenséget. Korlátozni az integrátor kimenetének nagy értékre kerülését. A szabályozási kör felszakadását megakadályozni, pl. egy akár gyengébb minőségű proporcionális szabályozás alkalmazásából, amely kivezeti a kört a telítődésből. Speciális anti-windup megoldások alkalmazása (l. a szakirodalomban). 41
42 DC motor fordulatszám-szabályozás További fordulatszám-szabályozási módszerek: Optimális szabályozások: lineáris kvadratikus szabályozás (LQ). Robusztus szabályozások: figyelembe veszik a paraméter-bizonytalanságokat. Nemlineáris szabályozások: figyelembe veszik a motor nemlineáris tulajdonságait (súrlódás, egyenetlenségek, játék, a vas nemlineáris mágnesezési tulajdonságai). A motor nemlineáris viselkedéséből eredő problémák: a gyakorlati példákon keresztül láthatjuk. 42


43 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Dr. Soumelidis Alexandros BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR /2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG
Az egységugrás függvény a 0 időpillanatot követően 10 nagyságú jelet ad, valamint K=2. Vizsgáljuk meg a kimenetet:
 II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Szabályozás Irányítástechnika PE MIK MI BSc 1
 Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból
 Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Számítógépes gyakorlat Irányítási rendszerek szintézise
 Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
L-transzformáltja: G(s) = L{g(t)}.
 = L{g(t)}.") Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
SZABÁLYOZÁSI KÖRÖK 2.
 Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Irányítástechnika 2. előadás
 Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
IRÁNYÍTÁSTECHNIKAI ALAPOK. Erdei István Grundfos South East Europe Kft.
 IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Márkus Zsolt Tulajdonságok, jelleggörbék, stb BMF -
 Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra
 SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra") Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Mechatronika alapjai órai jegyzet
 - 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
- 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 6. A MINTAVÉTELI TÖRVÉNY
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 6. A MINTAVÉTELI TÖRVÉNY Dr. Soumelidis Alexandros 2018.10.25. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mintavételezés
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 6. A MINTAVÉTELI TÖRVÉNY Dr. Soumelidis Alexandros 2018.10.25. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mintavételezés
Érzékelők és beavatkozók
 Érzékelők é beavatkozók DC motorok 2. réz egyetemi docen - 1 - A DC motor dinamiku leíráa Villamo egyenlet: R r L r i r v r v e v r a forgóréz kapocfezültége i r a forgóréz árama R r a forgóréz villamo
Érzékelők é beavatkozók DC motorok 2. réz egyetemi docen - 1 - A DC motor dinamiku leíráa Villamo egyenlet: R r L r i r v r v e v r a forgóréz kapocfezültége i r a forgóréz árama R r a forgóréz villamo
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 4.rész egyetemi docens - 1 - Az alkalmazott DC motor Cytron Technologies SPG30-30K hajtóműves motor Névleges feszültség: 12 VDC Üresjárási fordulatszám: 7000 RPM Induló
Érzékelők és beavatkozók DC motorok 4.rész egyetemi docens - 1 - Az alkalmazott DC motor Cytron Technologies SPG30-30K hajtóműves motor Névleges feszültség: 12 VDC Üresjárási fordulatszám: 7000 RPM Induló
Irányítástechnika II. előadásvázlat
 Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium
 Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium 4.. Két- és háromállású szabályozók. A két- és háromállású szabályozók nem-olytonos kimenettel
Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium 4.. Két- és háromállású szabályozók. A két- és háromállású szabályozók nem-olytonos kimenettel
Dr. Gyurcsek István. Példafeladatok. Helygörbék Bode-diagramok HELYGÖRBÉK, BODE-DIAGRAMOK DR. GYURCSEK ISTVÁN
 Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Villamosságtan szigorlati tételek
 Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
Hurokegyenlet alakja, ha az áram irányával megegyező feszültségeséseket tekintjük pozitívnak:
 Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Tartalom. Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra
 Tartalom Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra 2015 1 Robusztus stabilitás Szabályozási rendszer tervezésének gyakorlati problémája az, hogy az aktuális rendszer G(s) átviteli
Tartalom Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra 2015 1 Robusztus stabilitás Szabályozási rendszer tervezésének gyakorlati problémája az, hogy az aktuális rendszer G(s) átviteli
Ipari mintavételes PID szabályozóstruktúra megvalósítása
 Ipari mintavételes PID szabályozóstruktúra megvalósítása 1. A gyakorlat célja Készítsen diszkrét PID szabályozót megvalósító programot C++, obiektumorientált környezetben. Teszteléssel igazolja a szabályozó
Ipari mintavételes PID szabályozóstruktúra megvalósítása 1. A gyakorlat célja Készítsen diszkrét PID szabályozót megvalósító programot C++, obiektumorientált környezetben. Teszteléssel igazolja a szabályozó
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 9. SZŰRŐK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 9. SZŰRŐK Dr. Soumelidis Alexandros 2018.11.29. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A szűrésről általában Szűrés:
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 9. SZŰRŐK Dr. Soumelidis Alexandros 2018.11.29. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A szűrésről általában Szűrés:
Irányítástechnika labor Elméleti összefoglaló
 Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
10.1. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
ACS-1000 Ipari analóg szabályozó rendszer
 ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 4. VILLAMOS ELVŰ MÉRÉSEK ALAPELVEK, ALAPÁRAMKÖRŐK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 4. VILLAMOS ELVŰ MÉRÉSEK ALAPELVEK, ALAPÁRAMKÖRŐK Dr. Soumelidis Alexandros 2018.10.11. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 4. VILLAMOS ELVŰ MÉRÉSEK ALAPELVEK, ALAPÁRAMKÖRŐK Dr. Soumelidis Alexandros 2018.10.11. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
pont) Írja fel M struktúrában a parametrikus bizonytalansággal jellemzett
 Írja fel M struktúrában a parametrikus bizonytalansággal jellemzett") Irányításelmélet MSc (Tipikus példák) Gáspár Péter 1. Egyértelmű-e az irányíthatósági állapottér reprezentáció? Egyértelműe a diagonális állapottér reprezentáció? 2. Adja meg az állapotmegfigyelhetőség
Irányításelmélet MSc (Tipikus példák) Gáspár Péter 1. Egyértelmű-e az irányíthatósági állapottér reprezentáció? Egyértelműe a diagonális állapottér reprezentáció? 2. Adja meg az állapotmegfigyelhetőség
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
Tartalom. 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció)
") Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Irányítástechnika. II. rész. Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu
 Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 5. A JELFELDOLGOZÁS ALAPJAI: JELEK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 5. A JELFELDOLGOZÁS ALAPJAI: JELEK Dr. Soumelidis Alexandros 2018.10.18. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérések
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 5. A JELFELDOLGOZÁS ALAPJAI: JELEK Dr. Soumelidis Alexandros 2018.10.18. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérések
Mintavételezés és FI rendszerek DI szimulációja
 Mintavételezés és FI rendszerek DI szimulációja Dr. Horváth Péter, BME HVT 5. december.. feladat Adott az alábbi FI jel: x f (t) = cos(3t) + cos(4t), ([ω] =krad/s). Legalább mekkorára kell választani a
Mintavételezés és FI rendszerek DI szimulációja Dr. Horváth Péter, BME HVT 5. december.. feladat Adott az alábbi FI jel: x f (t) = cos(3t) + cos(4t), ([ω] =krad/s). Legalább mekkorára kell választani a
Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás Jelen gyűjtő munkát készítette Fölföldi Konrád,
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás Jelen gyűjtő munkát készítette Fölföldi Konrád,
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Lineáris rendszerek stabilitása
 Lineáris rendszerek stabilitása A gyakrlat célja A dlgzatban a lineáris rendszerek stabilitásának fgalmát vezetjük be majd megvizsgáljuk a stabilitás vizsgálati módszereket. Elméleti bevezető Egy LTI rendszer
Lineáris rendszerek stabilitása A gyakrlat célja A dlgzatban a lineáris rendszerek stabilitásának fgalmát vezetjük be majd megvizsgáljuk a stabilitás vizsgálati módszereket. Elméleti bevezető Egy LTI rendszer
MECHATRONIKA Mechatronika alapképzési szak (BSc) záróvizsga kérdései. (Javítás dátuma: )
 záróvizsga kérdései. (Javítás dátuma: )") MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
Jelek és rendszerek - 4.előadás
 Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Ipari kemencék PID irányítása
 Ipari kemencék PID irányítása 1. A gyakorlat célja: Az ellenállással melegített ipari kemencék modelljének meghatározása. A Opelt PID tervezési módszer alkalmazása ipari kemencék irányítására. Az ipari
Ipari kemencék PID irányítása 1. A gyakorlat célja: Az ellenállással melegített ipari kemencék modelljének meghatározása. A Opelt PID tervezési módszer alkalmazása ipari kemencék irányítására. Az ipari
Elektronika 11. évfolyam
 Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata.
 1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
Digitális jelfeldolgozás
 Digitális jelfeldolgozás Átviteli függvények Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. október 13. Digitális
Digitális jelfeldolgozás Átviteli függvények Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. október 13. Digitális
1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel
 1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel eltolt Dirac impulzusokból áll. Adja meg a hordozó jel I (s) T Laplace-transzformáltját és annak
1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel eltolt Dirac impulzusokból áll. Adja meg a hordozó jel I (s) T Laplace-transzformáltját és annak
OMRON MŰSZAKI INFORMÁCIÓK OMRON
 A hőmérséklet A stabil hőmérséklethoz szükséges idő függ a szabályozott rendszertől. A válaszidő megrövidítése rendszerint, túllövést vagy lengő rendszert fog eredményezni. Ha csökkentjük a hőmérséklet
A hőmérséklet A stabil hőmérséklethoz szükséges idő függ a szabályozott rendszertől. A válaszidő megrövidítése rendszerint, túllövést vagy lengő rendszert fog eredményezni. Ha csökkentjük a hőmérséklet
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN. 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1
 DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
1. Fejezet. Visszacsatolt erősítők. Elektronika 2 (BMEVIMIA027)
") Elektronika (MEVIMI07) Fejezet Visszacsatolt erősítők visszacsatolás célja: az erősítő paramétereinek igények szerinti megváltoztatása visszacsatolás elve (a J jel : vagy feszültség, vagy áram): J ki =
Elektronika (MEVIMI07) Fejezet Visszacsatolt erősítők visszacsatolás célja: az erősítő paramétereinek igények szerinti megváltoztatása visszacsatolás elve (a J jel : vagy feszültség, vagy áram): J ki =
A 2009-es vizsgákon szereplő elméleti kérdések
 Kivezérelhetőség és teljesítményfokozatok: A 2009-es vizsgákon szereplő elméleti kérdések 1. Ismertesse a B osztályú teljesítményfokozat tulajdonságait (P fmax, P Tmax, P Dmax(1 tr), η Tmax )! (szinuszos
Kivezérelhetőség és teljesítményfokozatok: A 2009-es vizsgákon szereplő elméleti kérdések 1. Ismertesse a B osztályú teljesítményfokozat tulajdonságait (P fmax, P Tmax, P Dmax(1 tr), η Tmax )! (szinuszos
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz
 Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz 1. Hogyan lehet osztályozni a jeleket időfüggvényük időtartama szerint? 2. Mi a periodikus jelek definiciója? (szöveg, képlet, 3. Milyen
Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz 1. Hogyan lehet osztályozni a jeleket időfüggvényük időtartama szerint? 2. Mi a periodikus jelek definiciója? (szöveg, képlet, 3. Milyen
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
Irányításelmélet és technika II.
 Irányításelmélet és technika II. Modell-prediktív szabályozás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 2010 november
Irányításelmélet és technika II. Modell-prediktív szabályozás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 2010 november
Mechanika I-II. Példatár
 Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanika Tanszék Mechanika I-II. Példatár 2012. május 24. Előszó A példatár célja, hogy támogassa a mechanika I. és mechanika II. tárgy oktatását
Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanika Tanszék Mechanika I-II. Példatár 2012. május 24. Előszó A példatár célja, hogy támogassa a mechanika I. és mechanika II. tárgy oktatását
Automatizált frekvenciaátviteli mérőrendszer
 Rendszertechnikai átviteli karakterisztika számítógépes mérése Automatizált frekvenciaátviteli mérőrendszer Samu Krisztián, BME-FOT megvalósítása Labview fejlesztőkörnyezetben Gyakori műszaki feladat,
Rendszertechnikai átviteli karakterisztika számítógépes mérése Automatizált frekvenciaátviteli mérőrendszer Samu Krisztián, BME-FOT megvalósítása Labview fejlesztőkörnyezetben Gyakori műszaki feladat,
Elektronika Oszcillátorok
 8. Az oszcillátorok periodikus jelet előállító jelforrások, generátorok. Olyan áramkörök, amelyeknek csak kimenete van, bemenete nincs. Leggyakoribb jelalakok: - négyszög - szinusz A jelgenerálás alapja
8. Az oszcillátorok periodikus jelet előállító jelforrások, generátorok. Olyan áramkörök, amelyeknek csak kimenete van, bemenete nincs. Leggyakoribb jelalakok: - négyszög - szinusz A jelgenerálás alapja
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL 1. EGYENÁRAM
 ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL INFORMATIKUS HALLGATÓK RÉSZÉRE 1. EGYENÁRAM 1. Vezesse le a feszültségosztó képletet két ellenállás (R 1 és R 2 ) esetén! Az összefüggésben szerepl mennyiségek jelölését
ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL INFORMATIKUS HALLGATÓK RÉSZÉRE 1. EGYENÁRAM 1. Vezesse le a feszültségosztó képletet két ellenállás (R 1 és R 2 ) esetén! Az összefüggésben szerepl mennyiségek jelölését
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
2. Folytonos lineáris rendszerek leírása az id!-, az operátor- és a frekvenciatartományban
 Önellen!rz! kérdések 1. Bevezetés 1. Ismertessen néhány tipikus irányítási feladatot! 2. Definiálja az irányítás m!veletét, ismertesse a kézi és automatikus irányítás közötti különbséget! 3. Ismertesse
Önellen!rz! kérdések 1. Bevezetés 1. Ismertessen néhány tipikus irányítási feladatot! 2. Definiálja az irányítás m!veletét, ismertesse a kézi és automatikus irányítás közötti különbséget! 3. Ismertesse
Jelgenerátorok ELEKTRONIKA_2
 Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel.
 25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel. A gerjesztı jelek hálózatba történı be- vagy kikapcsolása után átmeneti (tranziens) jelenség játszódik le. Az állandósult (stacionárius)
25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel. A gerjesztı jelek hálózatba történı be- vagy kikapcsolása után átmeneti (tranziens) jelenség játszódik le. Az állandósult (stacionárius)
Mérésadatgyűjtés, jelfeldolgozás.
 Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
Mérésadatgyűjtés, jelfeldolgozás. Nem villamos jelek mérésének folyamatai. Érzékelők, jelátalakítók felosztása. Passzív jelátalakítók. 1.Ellenállás változáson alapuló jelátalakítók -nyúlásmérő ellenállások
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Irányítástechnika 12. évfolyam
 Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
FOLYAMATIRÁNYÍTÁSI RENDSZEREK
 Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
ÁRAMKÖRÖK SZIMULÁCIÓJA
 ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
AZ INSTACIONER HŐVEZETÉS ÉPÜLETSZERKEZETEKBEN. várfalvi.
 AZ INSTACIONER HŐVEZETÉS ÉPÜLETSZERKEZETEKBEN várfalvi. IDÉZZÜK FEL A STACIONER HŐVEZETÉST q áll. t x áll. q λ t x t λ áll x. λ < λ t áll. t λ áll x. x HŐMÉRSÉKLETELOSZLÁS INSTACIONER ESETBEN Hőáram, hőmérsékleteloszlás
AZ INSTACIONER HŐVEZETÉS ÉPÜLETSZERKEZETEKBEN várfalvi. IDÉZZÜK FEL A STACIONER HŐVEZETÉST q áll. t x áll. q λ t x t λ áll x. λ < λ t áll. t λ áll x. x HŐMÉRSÉKLETELOSZLÁS INSTACIONER ESETBEN Hőáram, hőmérsékleteloszlás
Mechatronika II (BMEGEFOAMM2)
") Mechatronika II (BMEGEFOAMM2) Első gyakorlat Készítette: Raj Levente Tartalom Bevezetés... 3 Jelölések... 3 101 Egységugrás bemenetre adott válaszfüggvény (időfüggvény) meghatározása... 4 Feladatleírás...
Mechatronika II (BMEGEFOAMM2) Első gyakorlat Készítette: Raj Levente Tartalom Bevezetés... 3 Jelölések... 3 101 Egységugrás bemenetre adott válaszfüggvény (időfüggvény) meghatározása... 4 Feladatleírás...
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Proporcionális hmérsékletszabályozás
 Proporcionális hmérséletszabályozás 1. A gyaorlat célja Az implzsszélesség modlált jele szoftverrel történ generálása. Hmérsélet szabályozás implementálása P szabályozóval. 2. Elméleti bevezet 2.1 A proporcionális
Proporcionális hmérséletszabályozás 1. A gyaorlat célja Az implzsszélesség modlált jele szoftverrel történ generálása. Hmérsélet szabályozás implementálása P szabályozóval. 2. Elméleti bevezet 2.1 A proporcionális
Soros kompenzátor tervezés Matlab segédlet
 Soros kompenzátor tervezés Matlab segédlet FIGYELEM: Az elektronikus labor 20 kérdésből álló (feleletválasztós) beugró teszttel indul (min. 60% kell a sikeres teljesítéshez), melynek anyaga a 2., 3.a.,
Soros kompenzátor tervezés Matlab segédlet FIGYELEM: Az elektronikus labor 20 kérdésből álló (feleletválasztós) beugró teszttel indul (min. 60% kell a sikeres teljesítéshez), melynek anyaga a 2., 3.a.,
Irányításelmélet és technika I.
 Irányításelmélet és technika I Folytonos idejű rendszerek leírása az állapottérben Állapotvisszacsatolást alkalmazó szabályozási körök Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki
Irányításelmélet és technika I Folytonos idejű rendszerek leírása az állapottérben Állapotvisszacsatolást alkalmazó szabályozási körök Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 2. DC MOTOROK BEVEZETÉS ÉS STATIKUS MODELLEZÉS
 ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
Hálózatok számítása egyenáramú és szinuszos gerjesztések esetén. Egyenáramú hálózatok vizsgálata Szinuszos áramú hálózatok vizsgálata
 Hálózatok számítása egyenáramú és szinuszos gerjesztések esetén Egyenáramú hálózatok vizsgálata Szinuszos áramú hálózatok vizsgálata Egyenáramú hálózatok vizsgálata ellenállások, generátorok, belső ellenállások
Hálózatok számítása egyenáramú és szinuszos gerjesztések esetén Egyenáramú hálózatok vizsgálata Szinuszos áramú hálózatok vizsgálata Egyenáramú hálózatok vizsgálata ellenállások, generátorok, belső ellenállások
u ki ) = 2 x 100 k = 1,96 k (g 22 = 0 esetén: 2 k)
 = 2 x 100 k = 1,96 k (g 22 = 0 esetén: 2 k)") lektronika 2 (MVIMIA027 Számpélda a földelt emitteres erősítőre: Adott kapcsolás: =0 µ = k 4,7k U t+ = 0V 2 k 2 = 0µ u u =3 k =00µ U t- =-0V Számított tranzisztor-paraméterek: ezzel: és u ki t =0k Tranzisztoradatok:
lektronika 2 (MVIMIA027 Számpélda a földelt emitteres erősítőre: Adott kapcsolás: =0 µ = k 4,7k U t+ = 0V 2 k 2 = 0µ u u =3 k =00µ U t- =-0V Számított tranzisztor-paraméterek: ezzel: és u ki t =0k Tranzisztoradatok:
Mérések állítható hajlásszögű lejtőn
 A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
Milyen elvi mérési és számítási módszerrel lehet a Thevenin helyettesítő kép elemeit meghatározni?
 1. mérés Definiálja a korrekciót! Definiálja a mérés eredményét metrológiailag helyes formában! Definiálja a relatív formában megadott mérési hibát! Definiálja a rendszeres hibát! Definiálja a véletlen
1. mérés Definiálja a korrekciót! Definiálja a mérés eredményét metrológiailag helyes formában! Definiálja a relatív formában megadott mérési hibát! Definiálja a rendszeres hibát! Definiálja a véletlen
ELLENŐRZŐ KÉRDÉSEK. Váltakozóáramú hálózatok
 ELLENŐRZŐ KÉRDÉSEK Váltakozóáramú hálózatok Háromfázisú hálózatok Miért használunk többfázisú hálózatot? Mutassa meg a háromfázisú rendszer fontosabb jellemzőit és előnyeit az egyfázisú rendszerrel szemben!
ELLENŐRZŐ KÉRDÉSEK Váltakozóáramú hálózatok Háromfázisú hálózatok Miért használunk többfázisú hálózatot? Mutassa meg a háromfázisú rendszer fontosabb jellemzőit és előnyeit az egyfázisú rendszerrel szemben!
ANALÓG ÉS DIGITÁLIS TECHNIKA I
 ANALÓG ÉS DIGITÁLIS TECHNIKA I Dr. Lovassy Rita lovassy.rita@kvk.uni-obuda.hu Óbudai Egyetem KVK Mikroelektronikai és Technológia Intézet 2. ELŐADÁS 2010/2011 tanév 2. félév 1 Aktív szűrőkapcsolások A
ANALÓG ÉS DIGITÁLIS TECHNIKA I Dr. Lovassy Rita lovassy.rita@kvk.uni-obuda.hu Óbudai Egyetem KVK Mikroelektronikai és Technológia Intézet 2. ELŐADÁS 2010/2011 tanév 2. félév 1 Aktív szűrőkapcsolások A
Mérési hibák 2006.10.04. 1
 Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
ELEKTRONIKAI ALAPISMERETEK
 Elektronikai alapismeretek középszint 06 ÉRETTSÉGI VIZSG 007. május 5. ELEKTRONIKI LPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSG JVÍTÁSI-ÉRTÉKELÉSI ÚTMTTÓ OKTTÁSI ÉS KLTRÁLIS MINISZTÉRIM Teszt jellegű
Elektronikai alapismeretek középszint 06 ÉRETTSÉGI VIZSG 007. május 5. ELEKTRONIKI LPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSG JVÍTÁSI-ÉRTÉKELÉSI ÚTMTTÓ OKTTÁSI ÉS KLTRÁLIS MINISZTÉRIM Teszt jellegű
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Számítógép-vezérelt szabályozás- és irányításelmélet
 Számítógép-vezérelt szabályozás- és irányításelmélet 2. gyakorlat Feladattípusok két függvény konvolúciója ÿ + aẏ + by = e at, y(), ẏ() típusú kezdetiérték feladatok megoldása (Laplace transzformációval)
Számítógép-vezérelt szabályozás- és irányításelmélet 2. gyakorlat Feladattípusok két függvény konvolúciója ÿ + aẏ + by = e at, y(), ẏ() típusú kezdetiérték feladatok megoldása (Laplace transzformációval)
Mérési jegyzőkönyv a 5. mérés A/D és D/A átalakító vizsgálata című laboratóriumi gyakorlatról
 Mérési jegyzőkönyv a 5. mérés A/D és D/A átalakító vizsgálata című laboratóriumi gyakorlatról A mérés helyszíne: A mérés időpontja: A mérést végezték: A mérést vezető oktató neve: A jegyzőkönyvet tartalmazó
Mérési jegyzőkönyv a 5. mérés A/D és D/A átalakító vizsgálata című laboratóriumi gyakorlatról A mérés helyszíne: A mérés időpontja: A mérést végezték: A mérést vezető oktató neve: A jegyzőkönyvet tartalmazó
PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A ROBOTPILÓTÁK IRÁNYÍTÁSTECHNIKAI MINŐSÉGI KÖVETELMÉNYEI
 Dr. Szegedi Péter PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A cikkben a Szojka-III pilóta nélküli repülőgép repülésmechanikai matematikai modelljei vizsgálatainak eredményeit
Dr. Szegedi Péter PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A cikkben a Szojka-III pilóta nélküli repülőgép repülésmechanikai matematikai modelljei vizsgálatainak eredményeit
Haszongépj. Németh. Huba. és s Fejlesztési Budapest. Kutatási. Knorr-Bremse. 2004. November 17. Knorr-Bremse 19.11.
 Haszongépj pjármű fékrendszer intelligens vezérl rlése Németh Huba Knorr-Bremse Kutatási és s Fejlesztési si Központ, Budapest 2004. November 17. Knorr-Bremse 19.11.2004 Huba Németh 1 Tartalom Motiváció
Haszongépj pjármű fékrendszer intelligens vezérl rlése Németh Huba Knorr-Bremse Kutatási és s Fejlesztési si Központ, Budapest 2004. November 17. Knorr-Bremse 19.11.2004 Huba Németh 1 Tartalom Motiváció
Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához
 Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához Gerzson Miklós 2015. december 8. 2 Tartalomjegyzék Bevezetés 5 1. Kötelező kérdések 7 1.1. Kötelező kérdések a Kalman-féle
Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához Gerzson Miklós 2015. december 8. 2 Tartalomjegyzék Bevezetés 5 1. Kötelező kérdések 7 1.1. Kötelező kérdések a Kalman-féle
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Fourier-sorfejtés vizsgálata Négyszögjel sorfejtése, átviteli vizsgálata
 Fourier-sorfejtés vizsgálata Négyszögjel sorfejtése, átviteli vizsgálata Reichardt, András 27. szeptember 2. 2 / 5 NDSM Komplex alak U C k = T (T ) ahol ω = 2π T, k módusindex. Időfüggvény előállítása
Fourier-sorfejtés vizsgálata Négyszögjel sorfejtése, átviteli vizsgálata Reichardt, András 27. szeptember 2. 2 / 5 NDSM Komplex alak U C k = T (T ) ahol ω = 2π T, k módusindex. Időfüggvény előállítása
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 02 Elektronikai technikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 02 Elektronikai technikus
A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA. 2006. április 28. 2006.04.24. 1
 A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA 2006. április 28. 2006.04.24. 1 MIÉRT VAN SZÜKSÉG HIDRAULIKAI BESZABÁLYOZÁSRA? HIDRAULIKAI RENDSZEREK HELYES MŰKÖDÉSÉNEK ALAPFELTÉTELEI 1. A TERVEZETT
A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA 2006. április 28. 2006.04.24. 1 MIÉRT VAN SZÜKSÉG HIDRAULIKAI BESZABÁLYOZÁSRA? HIDRAULIKAI RENDSZEREK HELYES MŰKÖDÉSÉNEK ALAPFELTÉTELEI 1. A TERVEZETT