Érzékelők és beavatkozók
|
|
|
- Hanna Gulyás
- 9 évvel ezelőtt
- Látták:
Átírás
1 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 -

2 Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron motor. Szinkron motor Állandó mágneses szinkron motor PMS motor Léptető motorok Reluktancia motor Kapcsolt reluktancia motor

3 A DC-motor DC-motor: egyenfeszültségről működtetett állandó mágneses, kommutátoros motor Állórész (stator) Forgórész (rotor) Állandó mágnes pólusai (állórész) Forgórész vasmag és tekercs Kommutátor (forgórész) Kefék (állórész) Forgórész tengely Egyenfeszültségű táplálás - 3 -
 Kefék (állórész) Forgórész tengely")
4 Megjegyzések: A DC-motor Egyenfeszültségről más motorokat is táplálnak ma szinte minden motortípust pl. az AC motort is. Nem csak állandó mágnesű DC motorok léteznek: az állórész is tartalmazhat elektromágnest soros és parallel(sönt) táplálású motorok. Vannak ugyanilyen szerkezetű váltakozó feszültségről táplált motorok (univerzális motorok) pl. hálózati táplálású kézi fúrógép motorja - 4 -
 táplálású motorok.")
5 A DC-motor Legfőbb megkülönböztető jegy a kommutáció módja: Mechanikusan kommutált motorok Kommutátor + kefék Alternatív elnevezés: Kefés DC-motor (brushed DC) - 5 -
 -")
6 A DC-motor 2-pólusú forgórész (a gyakorlatban nem használható) - 6 -

7 A DC motor Történelem: Jedlik Ányos motorja - 7 -

8 A DC motor A gyakorlatban használható elrendezés: 3-5- (páratlan) pólusú forgórész Vasmag nélküli (coreless) forgórész - 8 -
")
9 A DC motor Faulhaber Vasmag nélküli (coreless) motor - 9 -
")
10 A DC motor Faulhaber Lapos (flat) coreless motor integrált hajtóművel

11 A DC motor Maxon Vasmag nélküli forgórészes DC motor integrált bolygóműves hajtóművel és inkrementális optikai jeladóval (encoder)

12 A DC motor irányítás Irányítási alapfeladatok: Vezérlések: ablakmozgató, ablaktörlő motor, zármotor központi zárhoz (járműves példák). Fordulatszám-szabályozás fordulatszámmérésen alapuló visszacsatolt irányítás. Hajtás-szabályozás - nyomaték-fordulatszám szabályozás. Szervo-szabályozás szög- vagy pozíció szabályozás. Megjelenési formák: Rotációs és lineáris hajtások és szervók

13 Mérőeszközök Szögmérés: Abszolút és inkrementális jeladók. Optikai jeladók Mágneses forgó jeladók. Rezolverek. Elektromos eszközök: potenciométerek. Fordulatszám (szögsebesség) jeladók: Mágneses elvű jeladók: tachogenerátor. Időmérésen alapuló eszközök: optikai és mágneses impulzusszámlálók. Inerciális elvű jeladók: giro szenzorok (MEMS). Nyomaték jeladók

14 Mérőeszközök Optikai szögjeladó (encoder): Inkrementális Abszolút
:")
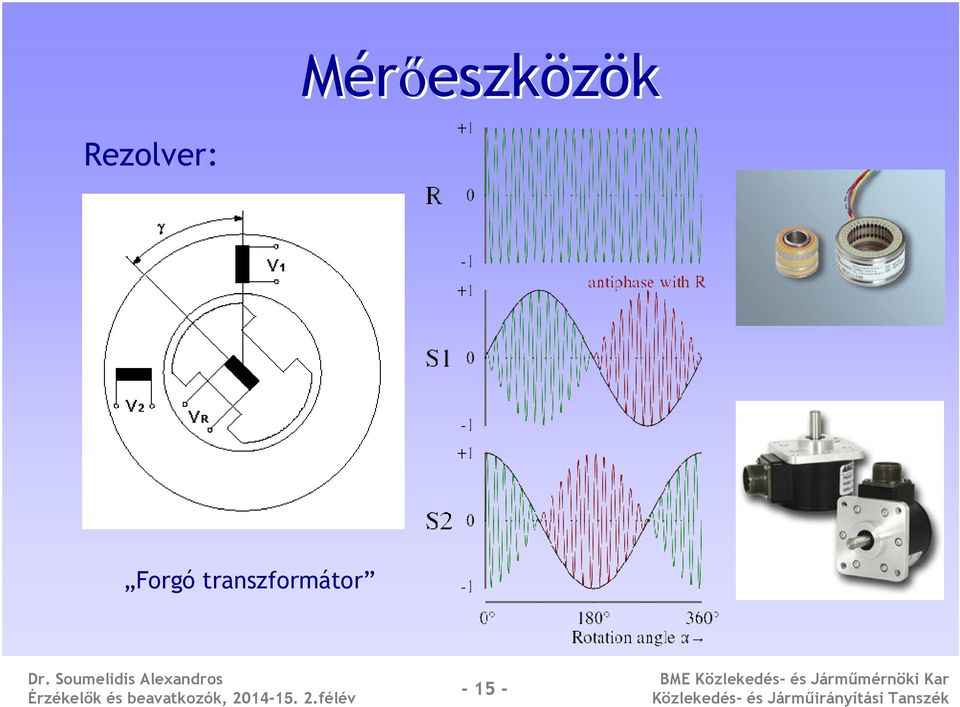
15 Mérőeszközök Rezolver: Forgó transzformátor
 - 16")
16 Mérőeszközök Mágneses abszolút szögjeladó: AMS (Austria)


17 Mérőeszközök Mágneses abszolút szögjeladó: off axis ic-haus (DE) Master track Nonius track A nonius track-en 1-el kevesebb domén Pozíciómérés egy-egy doménen belül 14 bit felbontással A domének sorszáma egyértelműen meghatározható az mért értékekből


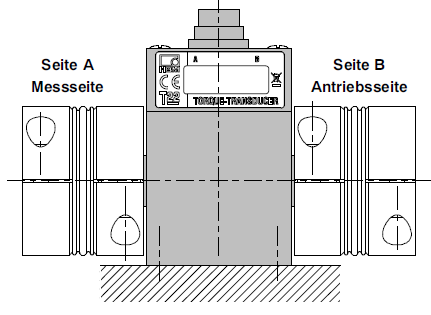
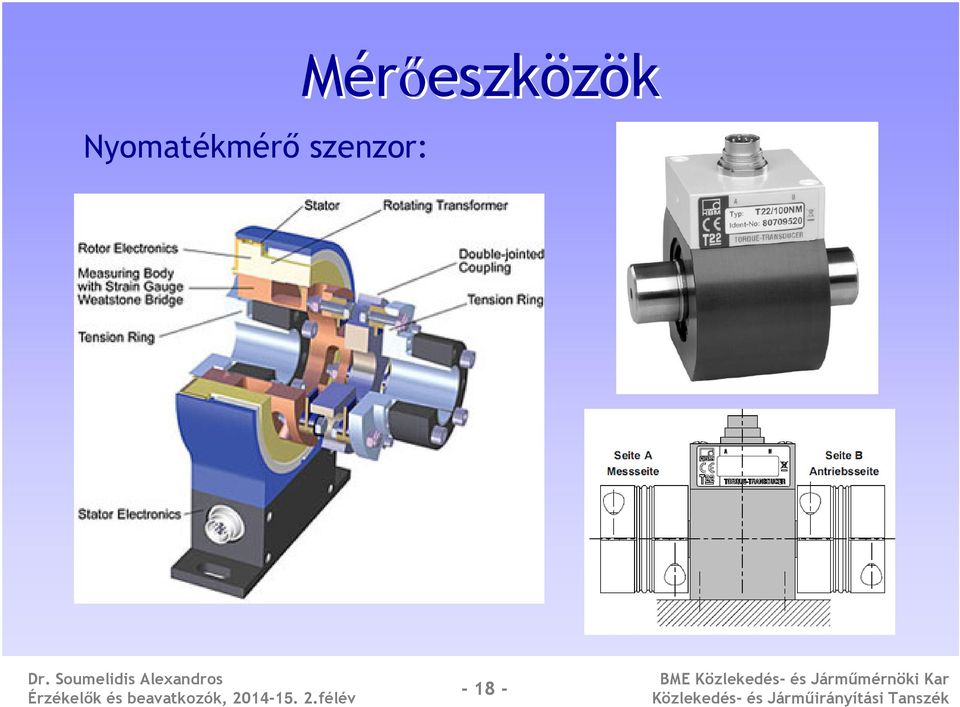
18 Nyomatékmérő szenzor: Mérőeszközök
19 A DC motor leírása A motor elektromos egyenlete: k e [V/rad/s] EMF-állandó és k m [Nm/A] nyomatéktényező SI mértékrendszerben azonos v r a forgórész kapocsfeszültsége i r a forgórész árama R r a forgórész villamos ellenállása L r a forgórész induktivitása v e elektromotoros erő indukált feszültség T m a motor által kifejtett nyomaték ω - a motor fordulatszáma (szögsebesség) k m - nyomatéktényező Állandósult állapotban bármiféle súrlódás elhanyagolásával
 k m - nyomatéktényező Állandósult állapotban bármiféle súrlódás")
20 A DC motor leírása Az állandó mágneses DC motorok konstrukciója: Biztosítja, hogy az álló- és forgórész közti légrésben a kialakuló mágneses fluxus szöghelyzettől függetlenül állandó Következmény: léteznek k e, k m konstansok és jó közelítéssel érvényes k e [V/rad/s] EMF-állandó k m [Nm/A] nyomatéktényező SI mértékrendszerben azonosak

21 A DC motor statikus leírása Állandósult állapotban bármiféle súrlódás elhanyagolásával Állandósult állapot: induktív hatás elhanyagolva, a kapocsfeszültség állandó, a motort terhelő nyomaték állandó
22 A DC motor statikus leírása T m K R m m U A kapocsfeszültséggel paraméterezett egyenes-sereg U nyugalmi nyomaték üresjárási fordulatszám U ω m K m
23 A DC motor statikus leírása Teljesítményviszonyok: P i felvett (villamos) teljesítmény P d ohmos ellenálláson disszipált teljesítmény P o leadott (mechanikai) teljesítmény fordított másodfokú parabola lokális maximuma van Zérushelyei: normál működési tartományának határai (1 síknegyed 1q)
24 A DC motor statikus leírása A maximális teljesítményű pont: Hatásfok: Lineáris összefüggés: maximum a tartomány határán ahol a hatásfok
25 A DC motor statikus leírása Nyomaték Teljesítmény Hatásfok
26 A DC motor statikus leírása A súrlódás figyelembe vétele: statikus és fordulatszámfüggő (viszkózus) súrlódás I 0 nyugalmi áram T0 alapnyomaték
27 A DC motor statikus leírása Teljesítményviszonyok statikus súrlódás esetén: Működési tartomány: Másodfokú parabola maximuma van
28 A DC motor statikus leírása Hatásfok: Értelmezési tartomány: a,b,c jelölésekkel: 0-tól az üresjárási körfrekvenciáig Van benne az értelmezési tartományban: 1 lokális maximum
29 A DC motor statikus leírása Nyomaték Teljesítmény Hatásfok
30 A DC motor statikus leírása Nyomaték Teljesítmény V r kapocsfeszültségtől való függése Hatásfok
31 A DC motor statikus leírása
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 2. DC MOTOROK BEVEZETÉS ÉS STATIKUS MODELLEZÉS
 ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Elektrotechnika. 11. előadás. Összeállította: Dr. Hodossy László
 11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Érzékelők és beavatkozók
 Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
(Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.)
 könyvéből vannak.)") Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
= f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni.
 44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
4. FEJEZET MOTORHAJTÁSOK
 Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Elektrotechnika. Dr. Hodossy László előadás
 Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK Dr. Soumelidis Alexandros 2019.04.16. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG AC motorok Félrevezető
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK Dr. Soumelidis Alexandros 2019.04.16. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG AC motorok Félrevezető
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Egyenáramú gépek. Felépítés
 Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
Az elektromos töltések eloszlása atomokban, molekulákban, ionokon belül és a vegyületekben. Vezetők, félvezetők és szigetelők molekuláris szerkezete.
 Szakképesítés: Log Autószerelő - 54 525 02 iszti Tantárgy: Elektrotechnikaelektronika Modul: 10416-12 Közlekedéstechnikai alapok Osztály: 11.a Évfolyam: 11. 36 hét, heti 2 óra, évi 72 óra Ok Dátum: 2013.09.21
Szakképesítés: Log Autószerelő - 54 525 02 iszti Tantárgy: Elektrotechnikaelektronika Modul: 10416-12 Közlekedéstechnikai alapok Osztály: 11.a Évfolyam: 11. 36 hét, heti 2 óra, évi 72 óra Ok Dátum: 2013.09.21
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet. Elektrotechnika
 Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
 BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
Unidrive - a vektorszabályozás alappillére
 Unidrive - a vektorszabályozás alappillére A vektorszabályozás jelenleg a váltakozó áramú ipari hajtások széles körben elfogadott és alkalmazott megoldása, amely kiváló szabályozást nyújt a mai szabványokhoz
Unidrive - a vektorszabályozás alappillére A vektorszabályozás jelenleg a váltakozó áramú ipari hajtások széles körben elfogadott és alkalmazott megoldása, amely kiváló szabályozást nyújt a mai szabványokhoz
EC-Motorok a légszállításban. villamosmérn. Budapest, 2008.04.01
 EC-Motorok a légszállításban Kovács Zoltán villamosmérn rnök Budapest, 2008.04.01 Bevezetés Az üzemeltetési költségek csökkentése. A működtetés szabályozhatóságának biztosítása. Elvárás: Összhangban van
EC-Motorok a légszállításban Kovács Zoltán villamosmérn rnök Budapest, 2008.04.01 Bevezetés Az üzemeltetési költségek csökkentése. A működtetés szabályozhatóságának biztosítása. Elvárás: Összhangban van
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Hajtástechnika. Villanymotorok. Egyenáramú motorok. Váltóáramú motorok
 Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
2.4 Fizika - Elektromosságtan 2.4.7 Elektromotor-generátor tanulói rendszer
 Kísérletek az elektromotor-generátor készlettel Az elektromotor-generátor készlet egy moduláris eszközrendszer a fizikai és műszaki összefüggéseket kidolgozó tanulói kísérletekhez, az elektromotorokat,
Kísérletek az elektromotor-generátor készlettel Az elektromotor-generátor készlet egy moduláris eszközrendszer a fizikai és műszaki összefüggéseket kidolgozó tanulói kísérletekhez, az elektromotorokat,
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
S Z I N K R O N G É P E K
 VILLANYSZERELŐ KÉPZÉS 2 0 1 5 S Z I N K R O N G É P E K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Szinkrongépek működési elve...3 Szinkrongépek felépítése...3 Szinkrongenerátor üresjárási
VILLANYSZERELŐ KÉPZÉS 2 0 1 5 S Z I N K R O N G É P E K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Szinkrongépek működési elve...3 Szinkrongépek felépítése...3 Szinkrongenerátor üresjárási
Elektronikus indítású, energiatakarékos szinkron kismotor
 Elektronikus indítású, energiatakarékos szinkron kismotor Dr. Lelkes András 1, Dr. Szabó Loránd 2 1) ebm Werke GmbH & Co. KG, Mulfingen / Németország lelkes@ieee.org 2) Kolozsvári Műszaki Egyetem / Románia
Elektronikus indítású, energiatakarékos szinkron kismotor Dr. Lelkes András 1, Dr. Szabó Loránd 2 1) ebm Werke GmbH & Co. KG, Mulfingen / Németország lelkes@ieee.org 2) Kolozsvári Műszaki Egyetem / Románia
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók
 Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
Egyenáramú gép mérése
 Egyenáramú gép mérése Villamos laboratórium 1. BMEVIVEA042 Németh Károly Kádár István Hajdu Endre 2016. szeptember.1. Tartalomjegyzék 1. A laboratóriumi mérés célja... 1 2. Elméleti alapismeretek, a méréssel
Egyenáramú gép mérése Villamos laboratórium 1. BMEVIVEA042 Németh Károly Kádár István Hajdu Endre 2016. szeptember.1. Tartalomjegyzék 1. A laboratóriumi mérés célja... 1 2. Elméleti alapismeretek, a méréssel
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás
 E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
A kommutáció elve. Gyűrűs tekercselésű forgórész. Gyűrűs tekercselésű kommutátoros forgórész
 Egyeáramú gépek 008 É É É + Φp + Φp + Φp - - - D D D A kommutáció elve Gyűrűs tekercselésű forgórész Gyűrűs tekercselésű kommutátoros forgórész 1 Egyeáramú gép forgórésze a) b) A feszültség időbeli változása
Egyeáramú gépek 008 É É É + Φp + Φp + Φp - - - D D D A kommutáció elve Gyűrűs tekercselésű forgórész Gyűrűs tekercselésű kommutátoros forgórész 1 Egyeáramú gép forgórésze a) b) A feszültség időbeli változása
TARTALOMJEGYZÉK. Előszó 9
 TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
Az aszinkron és a szinkron gépek külső mágnesének vasmagja, -amelyik általában az
 8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Váltakozóáramú gépek. Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet Váltakozóáramú gépek Összeállította: Langer Ingrid adjunktus Aszinkron (indukciós) gép Az ipari berendezések
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet Váltakozóáramú gépek Összeállította: Langer Ingrid adjunktus Aszinkron (indukciós) gép Az ipari berendezések
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
VI. fejezet. Az alapvető elektromechanikai átalakítók működési elvei
 VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Származtatása frekvencia-feltételből (általános áttekintés) A forgó mező tulajdonságai (már láttuk) III. A nyomatékképzés feltétele (alapesetben)
VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Származtatása frekvencia-feltételből (általános áttekintés) A forgó mező tulajdonságai (már láttuk) III. A nyomatékképzés feltétele (alapesetben)
1. Irányítástechnika. Készítette: Fecser Nikolett. 2. Ipari elektronika. Készítette: Horváth Lászó
 A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
INTELLIGENS TERMÉKEK ELEMEI AKTUÁTOROK
 INTELLIGENS TERMÉKEK ELEMEI AKTUÁTOROK Dr. Fekete Róbert Tamás adjunktus Mechatronika, Optika és Gépészeti Informatika Tanszék BME, D é., 5. e., 412. sz. 06 1 463 4060, frt@mogi.bme.hu SZABÁLYOZÁS KONTROLL
INTELLIGENS TERMÉKEK ELEMEI AKTUÁTOROK Dr. Fekete Róbert Tamás adjunktus Mechatronika, Optika és Gépészeti Informatika Tanszék BME, D é., 5. e., 412. sz. 06 1 463 4060, frt@mogi.bme.hu SZABÁLYOZÁS KONTROLL
VÁLTAKOZÓ ÁRAM JELLEMZŐI
 VÁLTAKOZÓ ÁA JELLEZŐI Ohmos fogyasztók esetén - a feszültség és az áramerősség fázisban van egymással Körfrekvencia: ω = π f I eff = 0,7 max I eff = 0,7 I max Induktív fogyasztók esetén - az áramerősség
VÁLTAKOZÓ ÁA JELLEZŐI Ohmos fogyasztók esetén - a feszültség és az áramerősség fázisban van egymással Körfrekvencia: ω = π f I eff = 0,7 max I eff = 0,7 I max Induktív fogyasztók esetén - az áramerősség
Elmozdulás mérés BELEON KRISZTIÁN BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1
 Elmozdulás mérés BELEON KRISZTIÁN 2016.11.17. 2016.11.17. BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1 Mérési eljárás szerint Rezisztív Induktív Kapacitív Optikai Mágneses 2016.11.17. BELEON KRISTIÁN
Elmozdulás mérés BELEON KRISZTIÁN 2016.11.17. 2016.11.17. BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1 Mérési eljárás szerint Rezisztív Induktív Kapacitív Optikai Mágneses 2016.11.17. BELEON KRISTIÁN
Négypólusok helyettesítő kapcsolásai
 Transzformátorok Magyar találmány: Bláthy Ottó Titusz (1860-1939), Déry Miksa (1854-1938), Zipernovszky Károly (1853-1942), Ganz Villamossági Gyár, 1885. Felépítés, működés Transzformátor: négypólus. Működési
Transzformátorok Magyar találmány: Bláthy Ottó Titusz (1860-1939), Déry Miksa (1854-1938), Zipernovszky Károly (1853-1942), Ganz Villamossági Gyár, 1885. Felépítés, működés Transzformátor: négypólus. Működési
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU AUTOMATIZÁLÁSI TANSZÉK HTTP://AUTOMATIZALAS.SZE.HU SZINKRON GÉPEK
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU SZINKRON GÉPEK 2013/2014 - őszi szemeszter Szinkron gép Szinkron gép Szinkron gép motor Szinkron gép állandó mágneses motor Szinkron generátor - energiatermelés
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU SZINKRON GÉPEK 2013/2014 - őszi szemeszter Szinkron gép Szinkron gép Szinkron gép motor Szinkron gép állandó mágneses motor Szinkron generátor - energiatermelés
VI. fejezet. Az alapvető elektromechanikai átalakítók működési elvei
 VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Aszinkron gépek Gépfajták származtatása #: ω r =var Az ún. indukciós gépek forgórészében indukált feszültségek által létrehozott rotoráramok
VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Aszinkron gépek Gépfajták származtatása #: ω r =var Az ún. indukciós gépek forgórészében indukált feszültségek által létrehozott rotoráramok
elektronika AC-Szinkronmotor MY 051/052/053/054
 AC-Szinkronmotor MY 01/02/03/04 MY 04 MY 03 MY 02 MY 01 Jellemzõk Kefe nélküli, magas dinamikájú Pozicionáló-motor kompakt kialakítás a ritka-földfém mágnes kis tehetetlenségi nyomaték az optimális rotorkonstrukció
AC-Szinkronmotor MY 01/02/03/04 MY 04 MY 03 MY 02 MY 01 Jellemzõk Kefe nélküli, magas dinamikájú Pozicionáló-motor kompakt kialakítás a ritka-földfém mágnes kis tehetetlenségi nyomaték az optimális rotorkonstrukció
Legutolsó frissítés ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL
 Legutolsó frissítés 2013.05.24. Tárgykód: BMEVIAUM012 ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL Fontos megjegyzés: a felkészüléshez ajánljuk a www.get.bme.hu hálózati
Legutolsó frissítés 2013.05.24. Tárgykód: BMEVIAUM012 ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL Fontos megjegyzés: a felkészüléshez ajánljuk a www.get.bme.hu hálózati
MÁGNESES INDUKCIÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK
 MÁGNESES NDUKCÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK Mágneses indukció Mozgási indukció v B Vezetőt elmozdítunk mágneses térben B-re merőlegesen, akkor a vezetőben áram keletkezik, melynek iránya az őt létrehozó
MÁGNESES NDUKCÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK Mágneses indukció Mozgási indukció v B Vezetőt elmozdítunk mágneses térben B-re merőlegesen, akkor a vezetőben áram keletkezik, melynek iránya az őt létrehozó
Az elektromágneses indukció jelensége
 Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
TANULÁSI ÚTMUTATÓ. Villanymotorok a gyakorlatban. Készítette: Mozsolics András
 TANULÁSI ÚTMUTATÓ Villanymotorok a gyakorlatban Készítette: Mozsolics András A fejlesztő intézmény megnevezése: Bánki Donát Térségi Integrált Szakképző Központ Kht. Székhelye: 2800 Tatabánya, Réti út 1-5.
TANULÁSI ÚTMUTATÓ Villanymotorok a gyakorlatban Készítette: Mozsolics András A fejlesztő intézmény megnevezése: Bánki Donát Térségi Integrált Szakképző Központ Kht. Székhelye: 2800 Tatabánya, Réti út 1-5.
Villamos gépek. Villamos forgógépek. Forgógépek elvi felépítése
 Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Érzékelők és beavatkozók
 Érzékelők és beavatkozók Kefe nélküli egyenáramú motorok egyetemi docens - 1 - BLDC motor Kefe nélküli egyenáramú (BLDC Brushless DC) motor 3-phase inverter VDC 120 A 120 N SW AU SW BU SW CU C S B SW AL
Érzékelők és beavatkozók Kefe nélküli egyenáramú motorok egyetemi docens - 1 - BLDC motor Kefe nélküli egyenáramú (BLDC Brushless DC) motor 3-phase inverter VDC 120 A 120 N SW AU SW BU SW CU C S B SW AL
II. Szakmai Alap- és szakismeretek 12. Villamos rendszerek, motorok, hajtások Hunyadi Sándor
 A 2015. LVII-es energiahatékonysági törvényben meghatározott auditori és energetikai szakreferens vizsga felkészítő anyaga II. Szakmai Alap- és szakismeretek 12. Villamos rendszerek, Hunyadi Sándor 2017.
A 2015. LVII-es energiahatékonysági törvényben meghatározott auditori és energetikai szakreferens vizsga felkészítő anyaga II. Szakmai Alap- és szakismeretek 12. Villamos rendszerek, Hunyadi Sándor 2017.
Érzékelők és beavatkozók
 Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 6. BLDC (PMS) MOTOROK
 MOTOROK") ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 6. BLDC (PMS) MOTOROK Dr. Soumelidis Alexandros 2019.04.03. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Brushless DC
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 6. BLDC (PMS) MOTOROK Dr. Soumelidis Alexandros 2019.04.03. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Brushless DC
Aszinkron motoros hajtás Matlab szimulációja
 Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Forgójeladók. Inkrementális forgójeladók. Optikai inkrementális forgójeladók
 Forgójeladók A forgójeladó (enkóder, kódadó, impulzusadó, forgóadó, pozíció jeladó, szöghelyzet adó, szöghelyzet érzékelő, szögkódoló) alkalmas a forgástengely helyzetének, fordulatszámának és forgásirányának
Forgójeladók A forgójeladó (enkóder, kódadó, impulzusadó, forgóadó, pozíció jeladó, szöghelyzet adó, szöghelyzet érzékelő, szögkódoló) alkalmas a forgástengely helyzetének, fordulatszámának és forgásirányának
A villamos forgógépekkel szemben támasztott speciális követelmények szélturbina alkalmazások esetén A legelterjedtebb szélturbina rendszerek
 Szélgener lgenerátor fejlesztések sek a Hyundai Technology Center Hungary Kft-nél A villamos forgógépekkel szemben támasztott speciális követelmények szélturbina alkalmazások esetén A legelterjedtebb szélturbina
Szélgener lgenerátor fejlesztések sek a Hyundai Technology Center Hungary Kft-nél A villamos forgógépekkel szemben támasztott speciális követelmények szélturbina alkalmazások esetén A legelterjedtebb szélturbina
Szakmai tétel A. 3. a. Az egyenáramú armatúra hurkos és hullámos tekercselése. b. Statikus és dinamikus stabilitás, szinkrongépek lengései.
 Szakmai tétel A 1. a. Egyenáramú gép felépítése, működési elve. b. Szinkron generátorokkal kapcsolatos üzemviteli feladatok. A generátorok tipikus hibái, karbantartási munkái. 2. a. Egyenáramú gépek állórész
Szakmai tétel A 1. a. Egyenáramú gép felépítése, működési elve. b. Szinkron generátorokkal kapcsolatos üzemviteli feladatok. A generátorok tipikus hibái, karbantartási munkái. 2. a. Egyenáramú gépek állórész
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
Az elektromágneses indukció jelensége
 Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Szervomotorok, és azok jeladói. Erdélyi Viktor Ferenc 2011
 Szervomotorok, és azok jeladói Erdélyi Viktor Ferenc 2011 A szervó régebben és napjainkban: A szervók először természetesen a haditechnikában jelentek meg. Először tűzvezérlésre, és a gyalogságot navigáló
Szervomotorok, és azok jeladói Erdélyi Viktor Ferenc 2011 A szervó régebben és napjainkban: A szervók először természetesen a haditechnikában jelentek meg. Először tűzvezérlésre, és a gyalogságot navigáló
1 kérdés. Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt május 13. szombat Teszt feladatok 2017 Előzetes megtekintés
 Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
VILLAMOS HAJTÁSOK Készítette: Dr. Mádai Ferenc Miskolci Egyetem Elektrotechnikai-Elektronikai Tanszék 2014
 VILLAMOS HAJTÁSOK Készítette: Dr. Mádai Ferenc Miskolci Egyetem Elektrotechnikai-Elektronikai Tanszék 2014 2 1. ÁLTALÁNOS KÉRDÉSEK A villamos hajtások felépítése, stabilitása A villamos motorokat valamilyen
VILLAMOS HAJTÁSOK Készítette: Dr. Mádai Ferenc Miskolci Egyetem Elektrotechnikai-Elektronikai Tanszék 2014 2 1. ÁLTALÁNOS KÉRDÉSEK A villamos hajtások felépítése, stabilitása A villamos motorokat valamilyen
Elektrotechnika. Ballagi Áron
 Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
Tevékenység: 1.A szinkronmotorok állórészének kialakításáról
 Tevékenység: Olvassa el az állórész kialakításának lehetőségeit. Jegyezze meg a az eredő vektor vagy Parkvektor fogalmát, a Clark-transzformáció rendeltetését, az M nyomaték, az M r reluktancianyomaték,
Tevékenység: Olvassa el az állórész kialakításának lehetőségeit. Jegyezze meg a az eredő vektor vagy Parkvektor fogalmát, a Clark-transzformáció rendeltetését, az M nyomaték, az M r reluktancianyomaték,
Villamos gépek tantárgy tételei
 10. tétel Milyen mérési feladatokat kell elvégeznie a kördiagram megszerkesztéséhez? Rajzolja meg a kördiagram felhasználásával a teljes nyomatéki függvényt! Az aszinkron gép egyszerűsített kördiagramja
10. tétel Milyen mérési feladatokat kell elvégeznie a kördiagram megszerkesztéséhez? Rajzolja meg a kördiagram felhasználásával a teljes nyomatéki függvényt! Az aszinkron gép egyszerűsített kördiagramja
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Irányítástechnika labor Elméleti összefoglaló
 Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
É r z é k e l ő k. M,ω M t. A korszerű, szabályozott villamos hajtás elvi felépítése 1.1.a ábra
 1 1. ÁLTALÁNOS KÉRDÉSEK. A villamos hajtás felépítése, kiválasztása, stabilitása. A villamos motorokat valamilyen technológiai (anyag-, energia-, biológiai-átalakítási, szállítási) folyamatot végző munkagép
1 1. ÁLTALÁNOS KÉRDÉSEK. A villamos hajtás felépítése, kiválasztása, stabilitása. A villamos motorokat valamilyen technológiai (anyag-, energia-, biológiai-átalakítási, szállítási) folyamatot végző munkagép
Új lehetőségek a hajtásszabályozásban a lég- és klímatechnika területén
 Új lehetőségek a hajtásszabályozásban a lég- és klímatechnika területén (Dr Szekeres József Rosenberg Hungária Kft Ügyvezető igazgató, Költő Sebestyén Rosenberg Hungária Kft illamos üzemvezető) Az üzemeltetési
Új lehetőségek a hajtásszabályozásban a lég- és klímatechnika területén (Dr Szekeres József Rosenberg Hungária Kft Ügyvezető igazgató, Költő Sebestyén Rosenberg Hungária Kft illamos üzemvezető) Az üzemeltetési
Magas minőségi követelményeket kielégítő szinkronmotoros szervó hajtások. Bakos Ádám
 Magas minőségi követelményeket kielégítő szinkronmotoros szervó hajtások Bakos Ádám 1/41 Tartalom Bevezetés Szinkrongépek vektoros leírása Szinkrongépek mezőorientált szabályozása Mezőorientált szabályozás
Magas minőségi követelményeket kielégítő szinkronmotoros szervó hajtások Bakos Ádám 1/41 Tartalom Bevezetés Szinkrongépek vektoros leírása Szinkrongépek mezőorientált szabályozása Mezőorientált szabályozás
VÁLTAKOZÓ ÁRAMÚ KÖRÖK
 Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Elektrotechnika. Dr. Hodossy László előadás
 . előadás Dr. Hodossy László 006. Hálózatok analízise. Alapfogalmak. Ellenállás 3. Generátorok 4. Hálózatszámí -tási törvények 5. Ellenállások soros és párhuzamos eredője 6. Példák 7. Példák 8. Példák
. előadás Dr. Hodossy László 006. Hálózatok analízise. Alapfogalmak. Ellenállás 3. Generátorok 4. Hálózatszámí -tási törvények 5. Ellenállások soros és párhuzamos eredője 6. Példák 7. Példák 8. Példák
Elektrotechnika 11/C Villamos áramkör Passzív és aktív hálózatok
 Elektrotechnika 11/C Villamos áramkör A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 11/C Villamos áramkör A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Soros kompenzátor tervezés Matlab segédlet
 Soros kompenzátor tervezés Matlab segédlet FIGYELEM: Az elektronikus labor 20 kérdésből álló (feleletválasztós) beugró teszttel indul (min. 60% kell a sikeres teljesítéshez), melynek anyaga a 2., 3.a.,
Soros kompenzátor tervezés Matlab segédlet FIGYELEM: Az elektronikus labor 20 kérdésből álló (feleletválasztós) beugró teszttel indul (min. 60% kell a sikeres teljesítéshez), melynek anyaga a 2., 3.a.,
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet
 Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
 Hibrid és villamos járművek, autók villamos hajtásai Vincze Gyuláné BME, Villamos Energetika Tanszék Villamos Gépek és Hajtások Csoport 1 Járművek segédüzemi hajtásai Biztonságtechnikai és kényelmi hajtások:
Hibrid és villamos járművek, autók villamos hajtásai Vincze Gyuláné BME, Villamos Energetika Tanszék Villamos Gépek és Hajtások Csoport 1 Járművek segédüzemi hajtásai Biztonságtechnikai és kényelmi hajtások:
ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL 1. EGYENÁRAM
 ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL INFORMATIKUS HALLGATÓK RÉSZÉRE 1. EGYENÁRAM 1. Vezesse le a feszültségosztó képletet két ellenállás (R 1 és R 2 ) esetén! Az összefüggésben szerepl mennyiségek jelölését
ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL INFORMATIKUS HALLGATÓK RÉSZÉRE 1. EGYENÁRAM 1. Vezesse le a feszültségosztó képletet két ellenállás (R 1 és R 2 ) esetén! Az összefüggésben szerepl mennyiségek jelölését
9. Szinkron gépek. Ebbõl következik, hogy a forgórésznek az állórész mezõvel együtt, azzal szinkron kell forognia
 9. Szinkron gépek 9.1. Mûködési elv, alapgondolat Láttuk, hogy v.á. gépeink mûködésének alapja két szinkron forgó forgómezõ, képletesen két összetapadt, együttfutó pólusrendszer. Tengelyeik között - a
9. Szinkron gépek 9.1. Mûködési elv, alapgondolat Láttuk, hogy v.á. gépeink mûködésének alapja két szinkron forgó forgómezõ, képletesen két összetapadt, együttfutó pólusrendszer. Tengelyeik között - a
Teljesítm. ltség. U max
 1 tmény a váltakozó áramú körben A váltakozv ltakozó feszülts ltség Áttekinthetően szemlélteti a feszültség pillanatnyi értékét a forgóvektoros ábrázolás, mely szerint a forgó vektor y-irányú vetülete
1 tmény a váltakozó áramú körben A váltakozv ltakozó feszülts ltség Áttekinthetően szemlélteti a feszültség pillanatnyi értékét a forgóvektoros ábrázolás, mely szerint a forgó vektor y-irányú vetülete
Váltakozóáramú gépek. Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet Váltakozóáramú gépek Összeállította: Langer Ingrid adjunktus Aszinkron (indukciós) gép Az ipari berendezések
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autótechnikai Intézet Váltakozóáramú gépek Összeállította: Langer Ingrid adjunktus Aszinkron (indukciós) gép Az ipari berendezések
Elektrotechnika. Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet
 Budapest űszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar echatronikai és Autotechnikai Intézet Elektrotechnika Egyenáram ramú gépek Összeállította: Langer Ingrid főisk. adjunktus Elektromechanikai
Budapest űszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar echatronikai és Autotechnikai Intézet Elektrotechnika Egyenáram ramú gépek Összeállította: Langer Ingrid főisk. adjunktus Elektromechanikai
írásbeli vizsgatevékenység
 Vizsgarészhez rendelt követelménymodul azonosítója, megnevezése: 0896-06 Villanyszerelési munka előkészítése, dokumentálása Vizsgarészhez rendelt vizsgafeladat száma, megnevezése: 0896-06/3 Mérési feladat
Vizsgarészhez rendelt követelménymodul azonosítója, megnevezése: 0896-06 Villanyszerelési munka előkészítése, dokumentálása Vizsgarészhez rendelt vizsgafeladat száma, megnevezése: 0896-06/3 Mérési feladat
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
Villamos gépek I. Egyfázisú transzformátor 3 1. A vasmag funkciói 3 2. Növekedési törvények 4 3. Felépítés: vasmag kialakítása (lemezelés,
 Villamos gépek I. Egyfázisú transzformátor 3 1. A vasmag funkciói 3 2. Növekedési törvények 4 3. Felépítés: vasmag kialakítása (lemezelés, lépcsőzés), tekercselések (hengeres, tárcsás) 9 4. Fő- és szórt
Villamos gépek I. Egyfázisú transzformátor 3 1. A vasmag funkciói 3 2. Növekedési törvények 4 3. Felépítés: vasmag kialakítása (lemezelés, lépcsőzés), tekercselések (hengeres, tárcsás) 9 4. Fő- és szórt
ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI
 ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI ÉS MOTORVÉDŐ KAPCSOLÓK KONTAKTOROK Kontaktor definíció: Olyan gyakori működésre alkalmas elektromágneses elven működtetett mechanikus kapcsolókészülék,
ÜZLETKÖTŐI ÉRTEKEZLET 2012-01-13 DUNAKESZI ÉS MOTORVÉDŐ KAPCSOLÓK KONTAKTOROK Kontaktor definíció: Olyan gyakori működésre alkalmas elektromágneses elven működtetett mechanikus kapcsolókészülék,
FÜGGVÉNYEK. A derékszögű koordináta-rendszer
 FÜGGVÉNYEK A derékszögű koordináta-rendszer Az. jelzőszámot az x tengelyről, a 2. jelzőszámot az y tengelyről olvassuk le. Pl.: A(-3;-) B(3;2) O(0;0) II. síknegyed I. síknegyed A (0; 0) koordinátájú pontot
FÜGGVÉNYEK A derékszögű koordináta-rendszer Az. jelzőszámot az x tengelyről, a 2. jelzőszámot az y tengelyről olvassuk le. Pl.: A(-3;-) B(3;2) O(0;0) II. síknegyed I. síknegyed A (0; 0) koordinátájú pontot
Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata
 2011.03.24. Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata BMEVIVEM264 Dr. Számel László Budapesti Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék Készült a Társadalmi Megújulás
2011.03.24. Fordulatszám szabályozott egyenáramú szervohajtás vizsgálata BMEVIVEM264 Dr. Számel László Budapesti Műszaki és Gazdaságtudományi Egyetem Villamos Energetika Tanszék Készült a Társadalmi Megújulás
33 522 04 1000 00 00 Villanyszerelő 4 Villanyszerelő 4
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
Nagyon sokféle berendezés van, ami villamos energiát alakít mechanikai energiává és
 1. fejezet Az elektromechanikai energiaátalakítás Nagyon sokféle berendezés van, ami villamos energiát alakít mechanikai energiává és fordítva. Ezeknek a berendezéseknek a felépítése különböző lehet, a
1. fejezet Az elektromechanikai energiaátalakítás Nagyon sokféle berendezés van, ami villamos energiát alakít mechanikai energiává és fordítva. Ezeknek a berendezéseknek a felépítése különböző lehet, a
Budapesti Műszaki és Gazdaságtudományi Egyetem Automatizálási és Alkalmazott Informatikai Tanszék. Elektromechanika. Alapkérdések
 Budapesti Műszaki és Gazdaságtudományi Egyetem Automatizálási és Alkalmazott Informatikai Tanszék Elektromechanika Alapkérdések Dr. Nagy István Egyetemi tanár vezetésével írta: Dranga Octavianus, doktorandusz
Budapesti Műszaki és Gazdaságtudományi Egyetem Automatizálási és Alkalmazott Informatikai Tanszék Elektromechanika Alapkérdések Dr. Nagy István Egyetemi tanár vezetésével írta: Dranga Octavianus, doktorandusz
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált
 Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Jelenlét, pozíció, elmozdulás érzékelők
 Jelenlét, pozíció, elmozdulás érzékelők 1 A szenzorok néhány főbb típusa: Ellenállásos szenzorok, Kapacitív szenzorok, Elektromágneses szenzorok, Piezoelektromos szenzorok, Optoelektronikus szenzorok és
Jelenlét, pozíció, elmozdulás érzékelők 1 A szenzorok néhány főbb típusa: Ellenállásos szenzorok, Kapacitív szenzorok, Elektromágneses szenzorok, Piezoelektromos szenzorok, Optoelektronikus szenzorok és
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.
 Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS