ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 6. BLDC (PMS) MOTOROK
|
|
|
- Ábel Gál
- 5 évvel ezelőtt
- Látták:
Átírás

1 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 6. BLDC (PMS) MOTOROK Dr. Soumelidis Alexandros BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR /2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG
2 Brushless DC (BLDC) Motor Kefe nélküli egyenáramú (BLDC Brushless DC) motor 3-phase inverter VDC 120 A 120 N SW AU SW BU SW CU C S B SW AL SW BL SW CL 120 2
3 BLDC motor Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase A Phase B Phase C
4 Phase 1 - start Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 1 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 4
5 Phase 1 - end Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 1 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 5
6 Phase 2 - start Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 2 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 6
7 Phase 2 - end Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 2 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 7
8 Phase 3 - start Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 3 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 8
9 Phase 3 - end Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 3 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 9
10 Phase 4 - start Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 4 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 10
11 Phase 4 - end Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 4 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 11
12 Phase 5 - start Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 5 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 12
13 Phase 5 - end Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 5 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 13
14 Phase 6 - start Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 6 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 14
15 Phase 6 - end Phase A Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase B Phase C Phase 6 A VDC SW AU SW BU SW CU C B SW AL SW BL SW CL 15
16 A BLDC motor vezérlése Problémák: Kommutáció: a kapcsolási állapotok közti váltás. Mikor (hol) váltsunk a kapcsolási állapotok között? Nincs mechanikus kommutátor Általában: kommutálás a forgórész meghatározott szöghelyzetében szöghelyzet érzékelés (mérés, detektálás). Követelmények: Folyamatos, egyenletes forgás. Maximális nyomaték biztosítása. Meghatározott fordulatszám biztosítása. Meghatározott nyomaték biztosítása. 16
17 BLDC motor típusok Szöghelyzet detektálás szemszögéből: Szenzoros BLDC vezérlés Mágneses (Hall) érzékelők kapcsolók elhelyezése az állórész meghatározott pozícióiban: a forgórész mágneses tere kapcsolja be-ki őket. Abszolút szöghelyzet mérés mágneses vagy optikai elven rugalmasabb megoldás: programozható kommutáció. Szenzor nélküli BLDC vezérlés Indukált feszültség (EMF) mérése, nullátmenet detektálás Szinuszos karakterisztika Négyszög karakterisztika Trapéz karakterisztika Kialakítás függvénye: Vasanyag alakja, légrések. Vasanyag mágneses tulajdonságai Tekercselés alakja, eloszlása 17



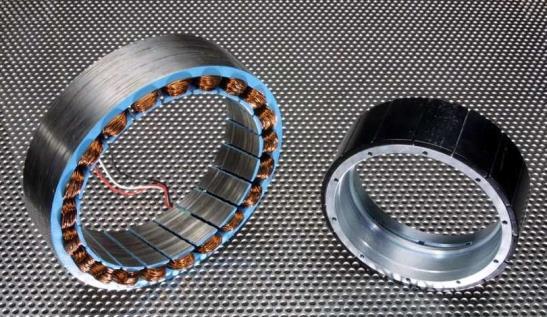

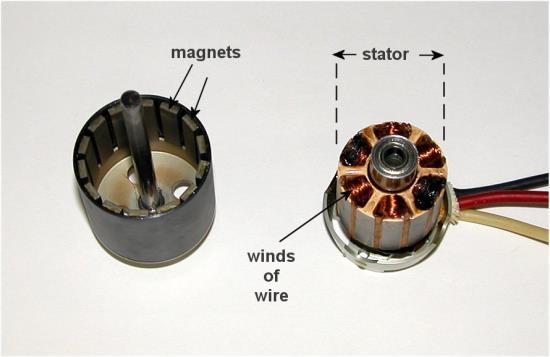
18 BLDC motor típusok Elektromechanikai kialakítás szempontjából: Belső forgórészes Külső forgórészes Tárcsamotorok 18
19 BLDC motor típusok Pólus-szám (póluspárok száma) szerint: pólusú motorok A 360º os teljes fordulatot a póluspárok száma szerint osztják több szegmensre Egy szegmensen belül a motor úgy viselkedik, mintha egy teljes fordulatot tenne meg. Villamos fordulat = Mechanikai fordulat / Póluspárok száma φ el = φ mech p 19
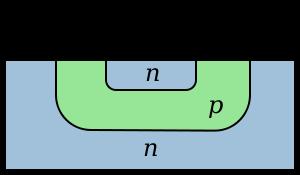
20 BLDC motor meghajtás A kapcsolóhálózat 3-fázisú H-híd - megvalósítása: NPN PNP Tranzisztor B C B C MOS-FET (Metal-Oxid-Semiconductor Field Effect Transistor) G E N-ch D G E P-ch D S S IGBT (Insulated-Gate Bipolar Transistor) 20





21 BLDC motor meghajtás Tranzisztor MOS-FET IGBT 21
22 BLDC motor meghajtás Transzfer karakterisztika: kétállapotú kapcsoló Vezető állapot: kis R Nem-vezető állapot: nagyon nagy R Tranzisztor MOS-FET IGBT 22
23 BLDC motor meghajtás 3-fázisú inverterek: 23
24 BLDC motor meghajtás MOSFET alapú 3-fázisú H-híd: N-P csatornás MOS FET-ek 24
25 BLDC motor meghajtás MOSFET alapú 3-fázisú H-híd: N csatornás MOS FET-ek 25
26 BLDC motor meghajtás MOSFET alapú 3-fázisú H-híd: Földoldalon N, tápoldalon P csatornás MOS-FET: Kisfeszültségű alkalmazásokban Egyszerű földoldali MOS meghajtók Hátrány: a P-csatornás MOS-FET-ek általában rosszabb paraméterekkel rendelkeznek (bemeneti kapacitás, sebesség, nyitóirányú ellenállás) Föld- és tápoldalon N csatornás MOS-FET: Akár nagy feszültségek (pl. 600 V) alkalmazása Speciális tápoldali MOS meghajtókat igényel Alsó/felső kapcsolók azonos paraméterekkel rendelkeznek: szimmetria jobban biztosítható 26
27 BLDC motor meghajtás Földoldali MOS meghajtó: példa Microchip TC A földpotenciálhoz képest állítja elő a MOS-FET Gate vezérléshez szükséges feszültségszinteket. 27
28 BLDC motor meghajtás Föld- és tápoldali MOS meghajtó: példa IRF IR Háromfázisú MOSFET / IGBT H-hídmeghajtó A tápoldali MOSFET/IGBT vezérlése a középső pont (motor csatlakozási pont) potenciáljához képest történik boost áramkör. 28
29 BLDC motor meghajtás IRF2130/32 29
30 BLDC motor meghajtás A boost-áramkör működése: 1 dióda, 1 kondenzátor Ha V S feszültség alacsony, V B is elég alacsony lehet ahhoz, hogy a dióda kinyisson: a kondenzátor a diódán keresztül feltöltődik a V CC -V S feszültségre. V S magas szintre kerülése viszi magával V B szintet, a dióda lezár, a kondenzátor tartja a V B -hez képest pozitív feszültséget. V B t csak MOSFET G-je terheli, lassan változik. A működés feltétele: periodikus változás. 30
31 BLDC motor vezérlés A vezérlés összetevői: A kommutáció megvalósítása Teljesítmény-vezérlés: a kapocsfeszültség változtatása helyett PWM vezérlés A vezérlés feletti szinten megvalósítandó feladatok: Fordulatszám-szabályozás Nyomaték-szabályozás Pozíció- szabályozás Megvalósítási módjuk: visszacsatolt szabályozás. 31
32 BLDC motor vezérlés PWM vezérlés: Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 Phase A Phase B Phase C impulzusszélesség (kitöltési tényező) állítása révén 32
33 Szenzoros BLDC vezérlés Hall-szenzorok Kapcsoló állapotok Hall-szenzor jelek: állapotátmenetek a kommutálás helyén 33

34 Szenzor nélküli BLDC vezérlés Kapcsoló állapotok 34
35 Szenzor nélküli BLDC vezérlés Indukált feszültségek fázisonként 35
36 Szenzor nélküli BLDC vezérlés Mért indukált feszültségek (EMF) fázisonként 36

37 Szenzor nélküli BLDC vezérlés Nullátmenet detektálás - kommutáció 60 fáziseltolással 37
38 Szenzor nélküli BLDC vezérlés Kommutációs sorrend: a kapcsoló állapotokat feszültségszintekkel ábrázolva a vezérlés követi az EMF jelalakot 38
39 Szenzor nélküli BLDC vezérlés Phase 1 Phase 2 Phase 3 Phase 4 Phase 5 Phase 6 SW AU SW AL SW BU SW BL SW CU SW CL Pole A Pole B Pole C
40 Szenzor nélküli BLDC vezérlés EMF mérés: mindig a szabad (nem vezérelt) kimeneten A V EMFA V + V A = V M I A = i V N = V + (V + V V EMFA V EMFB ) / 2 Példa: A és B pólusok vezérelve, mérés a C póluson. C V EMFC I C = 0 N I B = i V EMFB B V C V B = V V C = V N V EMFC = V + (V + V V EMFA V EMFB ) / 2 V EMFC V 40
41 Szenzor nélküli BLDC vezérlés Problémák: A vezérlés megvalósításához szükség van az indukált feszültség (EMF) megfelelő szintjére, azaz a motornak el kell érnie valamilyen minimális fordulatszámot. A motor indításáról külön eljárás keretében kell gondoskodni, amikor a motor eléri a minimális fordulatszámot, lehet átállni a normál vezérlésre ill. szabályozásra. A motorindításnak fel kell készülnie különböző terhelési viszonyokra. Ha a motor üzem közben (pl. túlterhelés következtében) leáll, újra az indítási eljárást kell alkalmazni. 41
42 Szenzor nélküli BLDC vezérlés Példa egy indítási szekvenciára: A terhelésnek megfelelő PWM kitöltési tényezővel forgó mágneses teret állítunk elő növekedő fordulatszámmal. A mágneses tér forgás közben eléri azt a pozíciót, amelyben nyomatékot produkál a forgórészre, ekkor az elindul, és a mágneses térrel együtt forog. Ha a motor nem indul el, növeljük a kitöltési tényezőt, és újraindítjuk az eljárást. Ha a motor eléri a minimális fordulatszámot, azaz az EMF megfelelő szintű, normál működési módba kapcsolunk. 42

43 Szenzor nélküli BLDC vezérlés Problémák: Zajos EMF mérések a nullátmenetek meghatározása bizonytalan. Zajszűrés az EMF jeleken növeli a komplexitást, késleltetés visz be, korlátozott hatékonyságú. 43
44 Szenzor nélküli BLDC vezérlés Előnyei: A legkisebb költségű megoldás. Korlátok mellett rugalmas megoldás, a kommutációs stratégia könnyen változtatható (szoftverben valósul meg). Alkalmazási területek: Kisebb igényű hajtások, pl. ventillátorok, szivattyúk. Háztartási készülékek. Hobby, modell, játék. 44
45 Szenzor nélküli BLDC vezérlés Helyesen kommutált BLDC motor: Példa: gyakorlatilag úgy működik, mint az állandó mágneses DC motor 45


46 BLDC motor vezérlés Specifikáció: k m nyomatéktényezővel jól jellemezhető 46
47 BLDC motor vezérlés Speciális vezérlési feltételek alkalmazásával a standard tulajdonságok befolyásolhatók: A kommutálási szöghelyzetek módosításával a mezőgyengítés egyik formája a nominálisnál nagyobb fordulatszám érhető el, illetve befolyásolható a motor nyomatéka, leadott teljesítménye. A motoráram (az egyes fázisokon folyó áram) szabályozásával befolyásolható a motor fordulatszámnyomatéki jelleggörbéje. Precízebb vezérlés/szabályozás: szinuszos PMS (állandó mágneses szinkron) motorok. 47
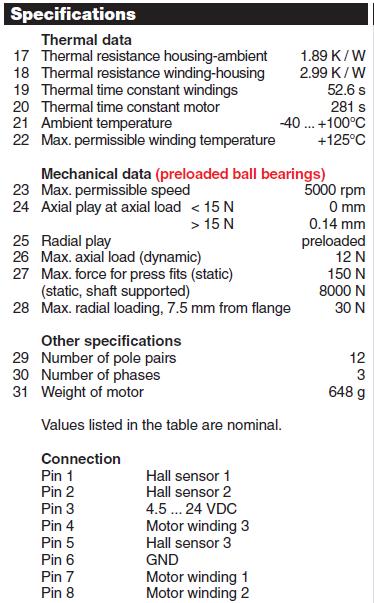
48 BLDC motor mérések A kommutáció megvalósítása ill. a motor szabályozása céljából érzékelni kell a motor állapotára jellemző paramétereket. Jellemző mérés-típusok: Szöghelyzet mérés ill. detektálás. Indukált feszültség (EMF) mérése. Motoráram, fázisáramok mérése. Fordulatszámmérés. Nyomatékmérés. 48
49 Hall-szenzorok Mágneses tér-érzékelő szenzorok Hall-effektus: A mágneses térben az áramló elektronokra Lorentz erő hat, ez potenciálkülönbséget kelt, amely mérhető. Magnetorezisztív hatás: A mágneses tér megváltoztatja a permalloy anyag (egy vasötvözet) ellenállását. 49
50 Hall-szenzorok Analóg Hall-szenzorok és Hall-kapcsolók (latch-ek) A mágneses térrel arányos feszültséget szolgáltatnak. Allegro A Allegro A Egy mágneses térerő küszöbérték alatt ill. felett kapcsolnak be-ki. open-drain MOS kapcsoló a kimeneten Reteszelődés (latch tulajdonság): valamely állapotból csak egy ellentétes irányú nagyobb változás viszi ki. 50
51 Hall-szenzorok Hall-kapcsoló (latch) A reteszelődés (latch tulajdonság) miatt nem impulzusszerű kimenetet ad, hanem állapotot jelez Motorvezérlésnél ez előnyös: a teljes kommutálási fázis alatt fenntartható a jele. Hiszterézis 51

52 Hall-szenzorok A Hall-kapcsoló alkalmazása: az open-drain kimenet miatt 52




53 Hall-szenzorok A Hall-kapcsolók alkalmazása szenzoros BLDC motorokban: Hall szenzorok 53
54 EMF mérés Egyszerű ellenállás osztó hálózat: 54
55 EMF mérés Ellenállás osztó hálózat: U U/V/W R 2 Miért kell osztani? Az indukált feszültség elég magas lehet nagy fordulatszámok esetén, magasabb akár a tápfeszültségnél is. R 1 C U EMF U/V/W Osztási arány: A EMF = R 1 R 1 + R 2 Törésponti frekvencia: RC szűrő: zajszűrés céljából f c = R 1 + R 2 2πR 1 R 2 C 55
56 EMF mérés Az EMF mérés megvalósítása: 1. AD konverterrel fázisonként 1-1 ADC csatorna. Nullátmenet meghatározása numerikusan. Zajszűrés digitális szűréssel. 2. Nullátmenetek direkt meghatározása komparátorokkal 1-1 komparátor fázisonként. Zajszűrés analóg és digitális módszerekkel: hiszterézis, élszűrés alkalmazása. Az EMF mérés viszonyítási pontja: Földpont, vagy valamely tápfeszültség pont Virtuális csillagpont (mivel a csillagpont nem áll rendelkezésre). 56
57 EMF mérés Virtuális csillagpont 57
58 Motoráram mérés Földponthoz viszonyított árammérés: motoráram U PS UH VH WH UL VL WL BLDC A fázisok áramai összeadódnak. R I R V IR 58
59 Motoráram mérés Földfüggetlen árammérés: fázisáramok U PS UH VH WH I U I V R W V IRW R V BLDC A fázisonkénti független árammérés. UL VL WL I W V IRV R U V IRU Lehetőséget ad fázisáramok független szabályozására. 59
60 Motoráram mérés Példa földponthoz viszonyított árammérésre 60
61 Motoráram mérés Árammérés megvalósítása: Kis értékű soros ellenálláson eső feszültség mérése Földhöz viszonyított mérés: neminvertáló erősítő kapcsolással kis offsetű, kis driftű műveleti erősítővel Földfüggetlen mérés: áramérzékelő (Current Sense) erősítővel Földfüggetlen mérés: galvanikusan leválasztott erősítő és AD konverter alkalmazásával. Mágneses elvű (Hall-elemes) áramérzékelő Földhöz viszonyított vagy földfüggetlen mérés 61
62 Motoráram mérés Földponthoz viszonyított árammérés kis értékű ellenállással Nagyon kis értékű ellenállás alkalmazása: kis disszipáció (hőveszteség), kismértékű melegedés, nem tolódnak el a potenciálviszonyok mω tipikus értékek. Pontos, kis toleranciájú ellenállás alkalmazása 1% - 0.1% - ez utóbbiak igen drágák. Nagyon kis (mv nagyságrendű) feszültségek mérését kell megoldani: az erősítő offset-je és hőmérsékleti drift-je kritikus 0-driftű műveleti erősítők; eléggé költségesek. Kis zajú mérőelemek alkalmazása, illetve zajszűrés megvalósítása elengedhetetlen. 62


63 Motoráram mérés Áramfigyelő ellenállások Vishay Dale WSK sorozat 0.001Ω 0.1 Ω 1-3W max disszipációval Kelvin csatlakozások: kis áramú mérőcsatlakozások, hogy a mérés ne befolyásolja mért áramot nagy impedanciájú merőeszköz csatlakozik rájuk. Vitriohm RWN sorozat 3 W disszipáció Isabellenhütte PBW sorozat 10 W disszipáció Kelvin csatlakozással 63
64 Motoráram mérés 0-driftű műveleti erősítők Kapcsolóüzemű (chopper-es) műveleti erősítők Működési elv (leegyszerűsítve): a + és bemeneteket kapcsolók segítségével felváltva cserélgetik az erősítő bemeneti körében az offset kiátlagolódik. Előnyeik: Gyakorlatilag 0 offset (0.5μV) és drift (0.03 μv/ºc). Hátrányaik: A kapcsolásból eredő zaj megjelenik a kimeneten. Korlátozott határfrekvencia 3-5 MHz Gain Bandwidth Product 64

65 Motoráram mérés 0-driftű műveleti erősítők Linear Technology LTC
66 Motoráram mérés Áramérzékelő (Current Sense) műveleti erősítők Földfüggetlen használatra (is) készülnek Működési elv (leegyszerűsítve): a + és bemenetekkel sorosan kapcsolt nagy ellenállások nagy közös modusú elnyomást (CMR) biztosítanak. 66
67 Motoráram mérés Áramérzékelő (Current Sense) műveleti erősítők Analog Devices AMP03 precíziós Current Sense differencia-erősítő Klasszikus típus Erősítés: 1 Tápfeszültség: ±6 - ±18V Bemeneti feszültségtartomány: min ±20V CMR: tipikusan 95 db 67
68 Motoráram mérés Áramérzékelő (Current Sense) erősítők Analog Devices AD8202 automotiv alkalmazásokra optimalizált Current Sense differencia-erősítő 80 db CMR -6V-18V tartományban miközben a tápfeszültség 5V. 68

69 Motoráram mérés Áramérzékelő (Current Sense) erősítők Linear Technology LTC1787 High Side Current Sense Amplifier 135 db CMR 0V-35V ill. 0-60V (HV változat) tápfeszültség tartományban 69
70 Motoráram mérés Áramérzékelő (Current Sense) erősítők alkalmazási korlátai: Korlátozott feszültségtartományban használhatók néhányszor 10 V átfogás, nagyobb feszültségű motorvezérlőkben nem használhatók. Kis offset és drift nem biztosítható optimális mértékben általában ellentmondanak a közösjel-elnyomás követelményeinek. A motorvezérlőkben előálló tranziensek miatt gondos tervezést igényelek a pontosság és megbízhatóság érdekében. 70
71 Motoráram mérés Mágneses elvű áramérzékelők: Hall effektus alapján működő érzékelők Galvanikusan független a mérendő- és a mérő-kör. Hall effektus A mérendő árammal arányos feszültséget adnak ki a kimenetükön. 71

72 Motoráram mérés Allegro ACS712: Fully Integrated, Hall Effect-Based Linear Current Sensor IC with 2.1 kvrms Isolation and a Low-Resistance Current Conductor 72

73 Motoráram mérés Allegro ACS712: Mérési tartomány: ±5 - ±30A 73

74 Motoráram mérés Allegro ACS756: Fully Integrated, Hall Effect-Based Linear Current Sensor IC with 3 kvrms Isolation and a Low-Resistance Current Conductor Mérési tartomány: ±50 - ±100A 74
75 Motoráram mérés Mágneses elvű áramérzékelők előnyei: Földpotenciáltól vagy egyéb más potenciáltól függetlenek. Galvanikusan leválasztottak, eleget tesznek nagyfeszültségű szigetelési követelményeknek. Nem függnek bármilyen közös jeltől. Egyen- vagy váltakozó illetve változó áram mérésére egyaránt használhatók*. * Nem így az áramváltók, amelyek lényegében váltakozó áramú transzformátorok. Mágneses elvű áramérzékelők hátrányai: Korlátozott pontosság (0.5 1 %). 75


76 Nagy áramok mérése Áramváltók: Földpotenciáltól vagy egyéb más potenciáltól függetlenek. Galvanikusan leválasztottak, eleget tesznek nagyfeszültségű szigetelési követelményeknek. Nem függnek bármilyen közös jeltől. Lényegében váltakozó áramú transzformátorok. Alapváltozatukban váltakozó áramok mérésére alkalmasak. Időben változó (nem feltétlenül szinuszos) áramok mérése: a szekunder körben jelfeldolgozás révén. 76




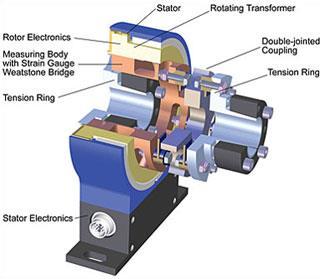
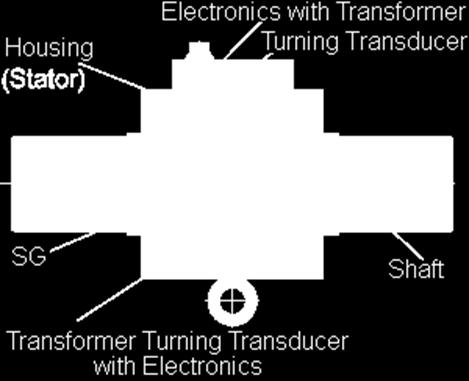
77 Nagy áramok mérése LEM áramváltók Hall-elvű áramérzékelők A DC 500 khz 77
78 Fordulatszám mérés Fordulatszám meghatározása BLDC motorokban: A fordulatszám kiadódik a kommutáció megvalósítása során, ill. időmérésre vagy impulzusszámlálásra vezethető vissza. A fordulatszámmérés eszközei: a mikroszámítógép időzítő (Timer) perifériái. Egyes esetekben vezérléstől független fordulatszámmérés szükséges: Inkrementális optikai vagy mágneses jeladó alkalmazása. 78
79 Szöghelyzet mérés Ugyanaz elmondható, mint a DC motorokkal kapcsolatban: Optikai elvű érzékelők Mágneses elvű érzékelők 79


80 Szöghelyzet mérés Optikai szögjeladó (encoder): Inkrementális Abszolút 80


81 Szöghelyzet mérés Rezolver: Forgó transzformátor 81

82 Szöghelyzet mérés Mágneses abszolút szögjeladó: AMS (Austria) 82
 Master track Nonius track A nonius track-en 1-el kevesebb")

83 Szöghelyzet mérés Mágneses abszolút szögjeladó: off axis ic-haus (DE) Master track Nonius track A nonius track-en 1-el kevesebb domén Pozíciómérés egy-egy doménen belül 14 bit felbontással A domének sorszáma egyértelműen meghatározható az mért értékekből 83


84 Nyomatékmérés Nyomatékmérő szenzor: forgó tengelyen való mérés 84



85 Nyomatékmérés Nyomatékmérő szenzor megvalósítási elvei: 85
 elven működő Gate meghajtó 100% kitöltési tényező mellett is működőképes 200 khz maximális PWM frekvencia")
86 BLDC motorvezérlő példa Texas Instruments DRV fázisú Gate meghajtó V működési feszültség 1 A Gate meghajtó áramok Töltés-szivattyú (charge-pump) elven működő Gate meghajtó 100% kitöltési tényező mellett is működőképes 200 khz maximális PWM frekvencia Programozható fel- és lefutási idők a Gate kimeneteken 3 árammérő erősítő Védelmi funkciók 48-kivezetésű HTQFP tok 86


87 BLDC motorvezérlő példa Texas Instruments DRV8305 alapú motorvezérlő panel TI Piccolo Launchpad alappanellel 87

88 BLDC motorvezérlő példa Texas Instruments DRV8305 alapú motorvezérlő panel 88


89 BLDC motorvezérlő példa Texas Instruments DRV8305 CSD18540Q5B 60V N-Channel NexFET Power MOSFET 89
90 BLDC motorvezérlő példa DMOS driver for three-phase brushless DC motor 8 52 V működési feszültség 2.8 A kimeneti áram R DS(on) 0.73 Ω 100 khz maximális PWM frekvencia Integrált szabadonfutás biztosító diódák Disszipációmentes árammérés és túláramvédelem Védelmi funkciók Diagnosztikai kimenet 90
91 BLDC motorvezérlő példa 6-lépéses BLDC vezérlés megvalósítása 91
92 BLDC motorvezérlő példa Logikai vezérlés: ENn INn Upper DMOS switch Lower DMOS switch 0 0 Off Off 0 1 Off Off 1 0 Off On 1 1 On Off 92

93 BLDC motorvezérlő példa ST Nucleo BLDC Evaluation Kit: 93
94 BLDC motorvezérlő példa 3-phase inverter VDC SW AU SW BU SW CU AC SW AL SW BL SW CL A 3-fázisú H-híd táp- és földoldali kapcsolóinak ellenütemű vezérlése mellett: Vector A + B + C + A B C V AB V BC V CA V 0 = {000} OFF OFF OFF ON ON ON V 1 = {100} ON OFF OFF OFF ON ON +V dc 0 V dc V 2 = {110} ON ON OFF OFF OFF ON 0 +V dc V dc V 3 = {010} OFF ON OFF ON OFF ON V dc +V dc 0 V 4 = {011} OFF ON ON ON OFF OFF V dc 0 +V dc V 5 = {001} OFF OFF ON ON ON OFF 0 V dc +V dc V 6 = {101} ON OFF ON OFF ON OFF +V dc V dc 0 V 7 = {111} ON ON ON OFF OFF OFF PWM nélkül: 6-pontos szinusz approximáció. PWM-mel: korlátlanul finomítható a 3-fázisú sin függvény nagy pontosságú előállítása. 94
95 Mezőorientált (FOC) szabályozás Tipikusan a (szinuszmezős) PMS motorok irányítására: FOC: Field Oriented Control PMSM A lényege: A 120 -os 3-tengelyű (nem ortogonális) koordináta rendszerről áttérünk 90 -os ortogonális rendszerre (q,d) irányú vektorok (Clark és Park transzformáció). A szabályozást az egymástól független (q,d) irányú komponensekre valósítjuk meg. Az eredményt visszatranszformáljuk 3 fázisú rendszerre (inverz Park transzformáció). Nem szinuszmezős motorokra (trapéz): korrekciókkal alkalmazható, egyébként nagyobb nyomatéklüktetéssel működnek. 95
96 Mezőorientált (FOC) szabályozás Clark transzformáció: I α = 2 3 I a 1 3 I b I c I β = 2 3 I b I c Feltételezve, hogy I a + I b + I c = 0, azaz nincs zérus sorrendi áram, [Ez automatikusan teljesül csillagkapcsolású motorokra (elszigetelt csillagpont esetén), más esetben delta kapcsolásnál többnyire elhanyagolható.] I α = I a I β = 1 3 I a + 2I b Álló ortogonális koordinátarendszer. 96
97 Mezőorientált (FOC) szabályozás Park transzformáció: elforgatás a forgás irányában az állórész mágneses terével vagy a forgórésszel együtt forgó ortogonális rendszer. I d = I α cos θ + I β sin θ I q = I β cos θ I α sin θ I d a térrel együtt forgó komponens I q a forgásra merőleges (kvadratikus) komponens Mind a Park-, mind pedig a Clark transzformációnak van egyértelmű inverze. 97
 szabályozás, de lehet optimális LQ, vagy robusztus (L ) szabályozás is.")
98 Mezőorientált (FOC) szabályozás Alkalmazás: Az egymásra merőleges I d és I q áramok egymástól függetlenül szabályozhatók (szétcsatolt rendszer). Szabályozók: Ma a leggyakoribb módszer a PID (PI) szabályozás, de lehet optimális LQ, vagy robusztus (L ) szabályozás is. FOC: Field Oriented Control PMSM 98
99 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Dr. Soumelidis Alexandros BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR /2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG
Érzékelők és beavatkozók
 Érzékelők és beavatkozók Kefe nélküli egyenáramú motorok egyetemi docens - 1 - BLDC motor Kefe nélküli egyenáramú (BLDC Brushless DC) motor 3-phase inverter VDC 120 A 120 N SW AU SW BU SW CU C S B SW AL
Érzékelők és beavatkozók Kefe nélküli egyenáramú motorok egyetemi docens - 1 - BLDC motor Kefe nélküli egyenáramú (BLDC Brushless DC) motor 3-phase inverter VDC 120 A 120 N SW AU SW BU SW CU C S B SW AL
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 4. DC MOTOROK VEZÉRLÉS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 4. DC MOTOROK VEZÉRLÉS Dr. Soumelidis Alexandros 2019.03.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG DC motorvezérlés
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 4. DC MOTOROK VEZÉRLÉS Dr. Soumelidis Alexandros 2019.03.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG DC motorvezérlés
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK Dr. Soumelidis Alexandros 2019.04.16. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG AC motorok Félrevezető
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK Dr. Soumelidis Alexandros 2019.04.16. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG AC motorok Félrevezető
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 2. DC MOTOROK BEVEZETÉS ÉS STATIKUS MODELLEZÉS
 ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros 2019.02.13. ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG Elektromos
Érzékelők és beavatkozók
 Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
Elektronika Előadás. Analóg és kapcsoló-üzemű tápegységek
 Elektronika 2 7. Előadás Analóg és kapcsoló-üzemű tápegységek Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - B. Carter, T.R. Brown: Handbook of Operational Amplifier Applications,
Elektronika 2 7. Előadás Analóg és kapcsoló-üzemű tápegységek Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - B. Carter, T.R. Brown: Handbook of Operational Amplifier Applications,
Logaritmikus erősítő tanulmányozása
 13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 4. VILLAMOS ELVŰ MÉRÉSEK ALAPELVEK, ALAPÁRAMKÖRŐK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 4. VILLAMOS ELVŰ MÉRÉSEK ALAPELVEK, ALAPÁRAMKÖRŐK Dr. Soumelidis Alexandros 2018.10.11. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 4. VILLAMOS ELVŰ MÉRÉSEK ALAPELVEK, ALAPÁRAMKÖRŐK Dr. Soumelidis Alexandros 2018.10.11. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
Elektronika Előadás. Műveleti erősítők táplálása, alkalmazása, alapkapcsolások
 Elektronika 2 2. Előadás Műveleti erősítők táplálása, alkalmazása, alapkapcsolások Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
Elektronika 2 2. Előadás Műveleti erősítők táplálása, alkalmazása, alapkapcsolások Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
Analóg áramkörök Műveleti erősítővel épített alapkapcsolások
 nalóg áramkörök Műveleti erősítővel épített alapkapcsolások Informatika/Elektronika előadás encz Márta/ess Sándor Elektronikus Eszközök Tanszék 07-nov.-22 Témák Műveleti erősítőkkel kapcsolatos alapfogalmak
nalóg áramkörök Műveleti erősítővel épített alapkapcsolások Informatika/Elektronika előadás encz Márta/ess Sándor Elektronikus Eszközök Tanszék 07-nov.-22 Témák Műveleti erősítőkkel kapcsolatos alapfogalmak
Elektronika I. Gyakorló feladatok
 Elektronika I. Gyakorló feladatok U I Feszültséggenerátor jelképe: Áramgenerátor jelképe: 1. Vezesse le a terheletlen feszültségosztóra vonatkozó összefüggést: 2. Vezesse le a terheletlen áramosztóra vonatkozó
Elektronika I. Gyakorló feladatok U I Feszültséggenerátor jelképe: Áramgenerátor jelképe: 1. Vezesse le a terheletlen feszültségosztóra vonatkozó összefüggést: 2. Vezesse le a terheletlen áramosztóra vonatkozó
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ELEKTRONIKAI ALAPISMERETEK
 Azonosító jel NSZI 0 6 0 6 OKTATÁSI MINISZTÉRIUM Szakmai előkészítő érettségi tantárgyi verseny 2006. április 19. ELEKTRONIKAI ALAPISMERETEK DÖNTŐ ÍRÁSBELI FELADATOK Az írásbeli időtartama: 240 perc 2006
Azonosító jel NSZI 0 6 0 6 OKTATÁSI MINISZTÉRIUM Szakmai előkészítő érettségi tantárgyi verseny 2006. április 19. ELEKTRONIKAI ALAPISMERETEK DÖNTŐ ÍRÁSBELI FELADATOK Az írásbeli időtartama: 240 perc 2006
Elektronika Előadás. Műveleti erősítők felépítése, ideális és valós jellemzői
 Elektronika 2 1. Előadás Műveleti erősítők felépítése, ideális és valós jellemzői Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
Elektronika 2 1. Előadás Műveleti erősítők felépítése, ideális és valós jellemzői Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
ELEKTRONIKAI ALAPISMERETEK
 ÉRETTSÉGI ÉRETTSÉGI VIZSGA VIZSGA 2009. 2006. május 22. ELEKTRONIKAI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI VIZSGA 2009. május 22. 8:00 Az írásbeli vizsga időtartama: 180 perc Pótlapok száma Tisztázati Piszkozati
ÉRETTSÉGI ÉRETTSÉGI VIZSGA VIZSGA 2009. 2006. május 22. ELEKTRONIKAI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI VIZSGA 2009. május 22. 8:00 Az írásbeli vizsga időtartama: 180 perc Pótlapok száma Tisztázati Piszkozati
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Elektronika Előadás. Modulátorok, demodulátorok, lock-in erősítők
 Elektronika 2 10. Előadás Modulátorok, demodulátorok, lock-in erősítők Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Elektronika 2 10. Előadás Modulátorok, demodulátorok, lock-in erősítők Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Elektronika Előadás. Műveleti erősítők. Alapkapcsolások műveleti erősítővel.
 Elektronika 1 8. Előadás Műveleti erősítők. Alapkapcsolások műveleti erősítővel. Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
Elektronika 1 8. Előadás Műveleti erősítők. Alapkapcsolások műveleti erősítővel. Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök,
Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások
 Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások Egyenirányítás: egyenáramú komponenst nem tartalmazó jelből egyenáramú összetevő előállítása. Nemlineáris áramköri elemet tartalmazó
Hálózati egyenirányítók, feszültségsokszorozók Egyenirányító kapcsolások Egyenirányítás: egyenáramú komponenst nem tartalmazó jelből egyenáramú összetevő előállítása. Nemlineáris áramköri elemet tartalmazó
Teljesítményerősítők ELEKTRONIKA_2
 Teljesítményerősítők ELEKTRONIKA_2 TEMATIKA Az emitterkövető kapcsolás. Az A osztályú üzemmód. A komplementer emitterkövető. A B osztályú üzemmód. AB osztályú erősítő. D osztályú erősítő. 2012.04.18. Dr.
Teljesítményerősítők ELEKTRONIKA_2 TEMATIKA Az emitterkövető kapcsolás. Az A osztályú üzemmód. A komplementer emitterkövető. A B osztályú üzemmód. AB osztályú erősítő. D osztályú erősítő. 2012.04.18. Dr.
Forgójeladók (kép - Heidenhain)
") Forgójeladók A forgójeladók választékában számos gyártó különböző szempontoknak megfelelő terméke megtalálható, ezért a felhasználónak a megfelelő típus kiválasztása néha nem kis nehézséget okoz. Ezen
Forgójeladók A forgójeladók választékában számos gyártó különböző szempontoknak megfelelő terméke megtalálható, ezért a felhasználónak a megfelelő típus kiválasztása néha nem kis nehézséget okoz. Ezen
Analóg-digitális átalakítás. Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék
 Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
Analóg-digitális átalakítás Rencz Márta/ Ress S. Elektronikus Eszközök Tanszék Mai témák Mintavételezés A/D átalakítók típusok D/A átalakítás 12/10/2007 2/17 A/D ill. D/A átalakítók A világ analóg, a jelfeldolgozás
Minden mérésre vonatkozó minimumkérdések
 Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Minden mérésre vonatkozó minimumkérdések 1) Definiálja a rendszeres hibát 2) Definiálja a véletlen hibát 3) Definiálja az abszolút hibát 4) Definiálja a relatív hibát 5) Hogyan lehet az abszolút-, és a
Teljesítmény-erősítők. Elektronika 2.
 Teljesítmény-erősítők Elektronika 2. Az erősítés elve Erősítés: vezérelt energia-átalakítás Vezérlő teljesítmény: Fogyasztó teljesítmény-igénye: Tápforrásból felvett teljesítmény: Disszipálódott teljesítmény:
Teljesítmény-erősítők Elektronika 2. Az erősítés elve Erősítés: vezérelt energia-átalakítás Vezérlő teljesítmény: Fogyasztó teljesítmény-igénye: Tápforrásból felvett teljesítmény: Disszipálódott teljesítmény:
DR. KOVÁCS ERNŐ MŰVELETI ERŐSÍTŐK MÉRÉSE
 M I S K O L C I E G Y E T E M GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR ELEKTROTECHNIKAI-ÉS ELEKTRONIKAI INTÉZET DR. KOVÁCS ERNŐ MŰVELETI ERŐSÍTŐK MÉRÉSE MECHATRONIKAI MÉRNÖKI BSc alapszak hallgatóinak MÉRÉSI
M I S K O L C I E G Y E T E M GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR ELEKTROTECHNIKAI-ÉS ELEKTRONIKAI INTÉZET DR. KOVÁCS ERNŐ MŰVELETI ERŐSÍTŐK MÉRÉSE MECHATRONIKAI MÉRNÖKI BSc alapszak hallgatóinak MÉRÉSI
Versenyző kódja: 7 27/2012. (VIII. 27.) NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.
 NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.") 54 523 02-2017 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 02 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Számolási,
54 523 02-2017 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 02 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Számolási,
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Rogowski-tekercses árammérő rendszer tervezése és fejlesztése
 Rogowski-tekercses árammérő rendszer tervezése és fejlesztése Fekete Ádám, Schmidt László, Szabó László, Dr. Varga László Fekete Ádám és Varga Balázs Budapest, 2013.04.24 Transzformátorok és mérőváltók
Rogowski-tekercses árammérő rendszer tervezése és fejlesztése Fekete Ádám, Schmidt László, Szabó László, Dr. Varga László Fekete Ádám és Varga Balázs Budapest, 2013.04.24 Transzformátorok és mérőváltók
MIKROELEKTRONIKA, VIEEA306
 Budapesti Műszaki és Gazdaságtudományi Egyetem MIKROELEKTRONIKA, VIEEA306 A MOS inverterek http://www.eet.bme.hu/~poppe/miel/hu/13-mosfet2.ppt http://www.eet.bme.hu Vizsgált absztrakciós szint RENDSZER
Budapesti Műszaki és Gazdaságtudományi Egyetem MIKROELEKTRONIKA, VIEEA306 A MOS inverterek http://www.eet.bme.hu/~poppe/miel/hu/13-mosfet2.ppt http://www.eet.bme.hu Vizsgált absztrakciós szint RENDSZER
Magas minőségi követelményeket kielégítő szinkronmotoros szervó hajtások. Bakos Ádám
 Magas minőségi követelményeket kielégítő szinkronmotoros szervó hajtások Bakos Ádám 1/41 Tartalom Bevezetés Szinkrongépek vektoros leírása Szinkrongépek mezőorientált szabályozása Mezőorientált szabályozás
Magas minőségi követelményeket kielégítő szinkronmotoros szervó hajtások Bakos Ádám 1/41 Tartalom Bevezetés Szinkrongépek vektoros leírása Szinkrongépek mezőorientált szabályozása Mezőorientált szabályozás
FÉLVEZETŐ ESZKÖZÖK II. Elektrotechnika 5. előadás
 FÉLVEZETŐ ESZKÖZÖK II. Elektrotechnika 5. előadás A tranzisztor felfedezése A tranzisztor kifejlesztését a Lucent Technologies kutatóintézetében, a Bell Laboratóriumban végezték el. A laboratóriumban három
FÉLVEZETŐ ESZKÖZÖK II. Elektrotechnika 5. előadás A tranzisztor felfedezése A tranzisztor kifejlesztését a Lucent Technologies kutatóintézetében, a Bell Laboratóriumban végezték el. A laboratóriumban három
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Az erősítés frekvenciafüggése: határfrekvenciák meghatározása ELEKTRONIKA_2
 Az erősítés frekvenciafüggése: határfrekvenciák meghatározása ELEKTRONIKA_2 TEMATIKA A kapacitív ellenállás. Váltakozó áramú helyettesítő kép. Alsó határfrekvencia meghatározása. Felső határfrekvencia
Az erősítés frekvenciafüggése: határfrekvenciák meghatározása ELEKTRONIKA_2 TEMATIKA A kapacitív ellenállás. Váltakozó áramú helyettesítő kép. Alsó határfrekvencia meghatározása. Felső határfrekvencia
Műveleti erősítők. Előzetes kérdések: Milyen tápfeszültség szükséges a műveleti erősítő működtetéséhez?
 Műveleti erősítők Előzetes kérdések: Milyen tápfeszültség szükséges a műveleti erősítő működtetéséhez? Milyen kimenő jel jelenik meg a műveleti erősítő bemeneteire adott jel hatására? Nem invertáló bemenetre
Műveleti erősítők Előzetes kérdések: Milyen tápfeszültség szükséges a műveleti erősítő működtetéséhez? Milyen kimenő jel jelenik meg a műveleti erősítő bemeneteire adott jel hatására? Nem invertáló bemenetre
Teljesítményelektronika szabályozása. Összeállította dr. Blága Csaba egyetemi docens
 Teljesítményelektronika szabályozása Összeállította dr. Blága Csaba egyetemi docens Szakirodalom 1. Ferenczi Ödön, Teljesítményszabályozó áramkörök, Műszaki Könyvkiadó, Budapest, 1981. 2. Ipsits Imre,
Teljesítményelektronika szabályozása Összeállította dr. Blága Csaba egyetemi docens Szakirodalom 1. Ferenczi Ödön, Teljesítményszabályozó áramkörök, Műszaki Könyvkiadó, Budapest, 1981. 2. Ipsits Imre,
Érzékelők és beavatkozók
 Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
Szimmetrikus bemenetű erősítők működésének tanulmányozása, áramköri paramétereinek vizsgálata.
 El. II. 5. mérés. SZIMMETRIKUS ERŐSÍTŐK MÉRÉSE. A mérés célja : Szimmetrikus bemenetű erősítők működésének tanulmányozása, áramköri paramétereinek vizsgálata. A mérésre való felkészülés során tanulmányozza
El. II. 5. mérés. SZIMMETRIKUS ERŐSÍTŐK MÉRÉSE. A mérés célja : Szimmetrikus bemenetű erősítők működésének tanulmányozása, áramköri paramétereinek vizsgálata. A mérésre való felkészülés során tanulmányozza
Elektronika laboratóriumi mérőpanel elab panel NEM VÉGLEGES VÁLTOZAT! Óbudai Egyetem
 Elektronika laboratóriumi mérőpanel elab panel NEM VÉGLEGES VÁLTOZAT! 1 Óbudai Egyetem 2 TARTALOMJEGYZÉK I. Bevezetés 3 I-A. Beüzemelés.................................. 4 I-B. Változtatható ellenállások...........................
Elektronika laboratóriumi mérőpanel elab panel NEM VÉGLEGES VÁLTOZAT! 1 Óbudai Egyetem 2 TARTALOMJEGYZÉK I. Bevezetés 3 I-A. Beüzemelés.................................. 4 I-B. Változtatható ellenállások...........................
A LED, mint villamos alkatrész
 LED tápegységek - LED, mint villamos alkatrész - LED, a törpefeszültségű áramkörben - közel feszültséggenerátoros táplálás és problémái - analóg disszipatív áramgenerátoros táplálás - kapcsolóüzemű áramgenerátoros
LED tápegységek - LED, mint villamos alkatrész - LED, a törpefeszültségű áramkörben - közel feszültséggenerátoros táplálás és problémái - analóg disszipatív áramgenerátoros táplálás - kapcsolóüzemű áramgenerátoros
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
Programozható Vezérlő Rendszerek. Hardver
 Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
feszültség konstans áram konstans
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrtechnológia laboratórium Szabó József Egyszerű feszültség és áramszabályozó Űrtechnológia a gyakorlatban Budapest, 2014. április 10. Űrtetechnológia a gyakorlatban
Szélessávú Hírközlés és Villamosságtan Tanszék Űrtechnológia laboratórium Szabó József Egyszerű feszültség és áramszabályozó Űrtechnológia a gyakorlatban Budapest, 2014. április 10. Űrtetechnológia a gyakorlatban
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
ELEKTRONIKAI ALAPISMERETEK
 ÉRETTSÉGI VIZSGA 2014. október 13. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2014. október 13. 14:00 Az írásbeli vizsga időtartama: 240 perc Pótlapok száma Tisztázati Piszkozati EMBERI ERŐFORRÁSOK
ÉRETTSÉGI VIZSGA 2014. október 13. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2014. október 13. 14:00 Az írásbeli vizsga időtartama: 240 perc Pótlapok száma Tisztázati Piszkozati EMBERI ERŐFORRÁSOK
SYS700-PLM Power Line Monitor modul DDC rendszerelemek, DIALOG-III család
 DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
DDC rendszerelemek, DIALOG-III család KIVITEL ALKALMAZÁS A az energiaellátás minőségi jellemzőinek mérésére szolgáló szabadon programozható készülék. Épületfelügyeleti rendszerben (BMS), valamint önállóan
ELEKTRONIKAI ALAPISMERETEK
 Elektronikai alapismeretek középszint 06 ÉRETTSÉGI VIZSG 007. május 5. ELEKTRONIKI LPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSG JVÍTÁSI-ÉRTÉKELÉSI ÚTMTTÓ OKTTÁSI ÉS KLTRÁLIS MINISZTÉRIM Teszt jellegű
Elektronikai alapismeretek középszint 06 ÉRETTSÉGI VIZSG 007. május 5. ELEKTRONIKI LPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSG JVÍTÁSI-ÉRTÉKELÉSI ÚTMTTÓ OKTTÁSI ÉS KLTRÁLIS MINISZTÉRIM Teszt jellegű
Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök
 Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök Buck, boost konverter Készítette: Támcsu Péter, 2016.10.09, Debrecen Felhasznált dokumentum : Losonczi Lajos - Analog Áramkörök 7 Feszültség
Lineáris és kapcsoló üzemű feszültség növelő és csökkentő áramkörök Buck, boost konverter Készítette: Támcsu Péter, 2016.10.09, Debrecen Felhasznált dokumentum : Losonczi Lajos - Analog Áramkörök 7 Feszültség
Elektrotechnika. 11. előadás. Összeállította: Dr. Hodossy László
 11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
HÁROMFÁZISÚ VÁLTAKOZÓ ÁRAM
 VILLANYSZERELŐ KÉPZÉS 2 0 1 5 HÁROMFÁZISÚ VÁLTAKOZÓ ÁRAM ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Nem szimmetrikus többfázisú rendszerek...3 Háronfázisú hálózatok...3 Csillag kapcsolású
VILLANYSZERELŐ KÉPZÉS 2 0 1 5 HÁROMFÁZISÚ VÁLTAKOZÓ ÁRAM ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Nem szimmetrikus többfázisú rendszerek...3 Háronfázisú hálózatok...3 Csillag kapcsolású
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ
 8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
8. Laboratóriumi gyakorlat INKREMENTÁLIS ADÓ 1. A gyakorlat célja: Az inkrementális adók működésének megismerése. Számítások és szoftverfejlesztés az inkrementális adók katalógusadatainak feldolgozására
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
Mérés és adatgyűjtés 4. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 4. óra Verzió: 1.3 Utolsó frissítés: 2011. május 15. 1/51 Tartalom I 1 A/D konverterek alkalmazása
ELEKTRONIKAI ALAPISMERETEK
 ÉRETTSÉGI VIZSGA 2011. október 17. ELEKTRONIKAI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI VIZSGA 2011. október 17. 14:00 Az írásbeli vizsga időtartama: 180 perc Pótlapok száma Tisztázati Piszkozati NEMZETI ERŐFORRÁS
ÉRETTSÉGI VIZSGA 2011. október 17. ELEKTRONIKAI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI VIZSGA 2011. október 17. 14:00 Az írásbeli vizsga időtartama: 180 perc Pótlapok száma Tisztázati Piszkozati NEMZETI ERŐFORRÁS
Hobbi Elektronika. Bevezetés az elektronikába: Térvezérlésű tranzisztorok (FET)
") Hobbi Elektronika Bevezetés az elektronikába: Térvezérlésű tranzisztorok (FET) 1 Felhasznált irodalom Sulinet Tudásbázis: Unipoláris tranzisztorok Electronics Tutorials: The MOSFET CONRAD Elektronik: Elektronikai
Hobbi Elektronika Bevezetés az elektronikába: Térvezérlésű tranzisztorok (FET) 1 Felhasznált irodalom Sulinet Tudásbázis: Unipoláris tranzisztorok Electronics Tutorials: The MOSFET CONRAD Elektronik: Elektronikai
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
VÁLTAKOZÓ ÁRAMÚ KÖRÖK
 Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
10.1. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
ÁLTALÁNOS SZENZORINTERFACE KÉSZÍTÉSE HANGKÁRTYÁHOZ
 ÁLTALÁNOS SZENZORINTERFACE KÉSZÍTÉSE HANGKÁRTYÁHOZ SIMONEK PÉTER KONZULENS: DR. OROSZ GYÖRGY MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK 2017. MÁJUS 10. CÉLKITŰZÉS Tesztpanel készítése műveleti erősítős
ÁLTALÁNOS SZENZORINTERFACE KÉSZÍTÉSE HANGKÁRTYÁHOZ SIMONEK PÉTER KONZULENS: DR. OROSZ GYÖRGY MÉRÉSTECHNIKA ÉS INFORMÁCIÓS RENDSZEREK TANSZÉK 2017. MÁJUS 10. CÉLKITŰZÉS Tesztpanel készítése műveleti erősítős
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
Energiaminőség- és energiamérés LINETRAXX PEM330/333
 Energiaminőség- és energiamérés LINETRAXX PEM330/333 1/6 Műszer jellemzői Pontossági osztály IEC 62053-22szerint: 0.5 S Mért jellemzők Fázisfeszültségek (V) U L1, U L2, U L3 Vonali feszültségek (V) U L1L2,
Energiaminőség- és energiamérés LINETRAXX PEM330/333 1/6 Műszer jellemzői Pontossági osztály IEC 62053-22szerint: 0.5 S Mért jellemzők Fázisfeszültségek (V) U L1, U L2, U L3 Vonali feszültségek (V) U L1L2,
Műveleti erősítők. 1. Felépítése. a. Rajzjele. b. Belső felépítés (tömbvázlat) c. Differenciálerősítő
 c. Differenciálerősítő") Műveleti erősítők A műveleti erősítők egyenáramú erősítőfokozatokból felépített, sokoldalúan felhasználható áramkörök, amelyek jellemzőit A u ', R be ', stb. külső elemek csatlakoztatásával széles határok
Műveleti erősítők A műveleti erősítők egyenáramú erősítőfokozatokból felépített, sokoldalúan felhasználható áramkörök, amelyek jellemzőit A u ', R be ', stb. külső elemek csatlakoztatásával széles határok
ELEKTRONIKA I. TRANZISZTOROK. BSc Mérnök Informatikus Szak Levelező tagozat
 ELEKTRONIKA I. TRANZISZTOROK BSc Mérnök Informatikus Szak Levelező tagozat Tranzisztorok Elemi félvezető eszközök Alkalmazásuk Analóg áramkörökben: erősítők Digitális áramkörökben: kapcsolók Típusai BJT
ELEKTRONIKA I. TRANZISZTOROK BSc Mérnök Informatikus Szak Levelező tagozat Tranzisztorok Elemi félvezető eszközök Alkalmazásuk Analóg áramkörökben: erősítők Digitális áramkörökben: kapcsolók Típusai BJT
Jelgenerátorok ELEKTRONIKA_2
 Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk váltakozó-áramú alkalmazásai. Elmélet Az integrált mûveleti erõsítõk váltakozó áramú viselkedését a. fejezetben (jegyzet és prezentáció)
Multi-20 modul. Felhasználói dokumentáció 1.1. Készítette: Parrag László. Jóváhagyta: Rubin Informatikai Zrt.
 Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
Multi-20 modul Felhasználói dokumentáció. Készítette: Parrag László Jóváhagyta: Rubin Informatikai Zrt. 49 Budapest, Egressy út 7-2. telefon: +36 469 4020; fax: +36 469 4029 e-mail: info@rubin.hu; web:
HSS60 ( ) típusú léptetőmotor meghajtó
 típusú léptetőmotor meghajtó") HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
ELEKTRONIKAI ALAPISMERETEK
 ÉRETTSÉGI VIZSGA 2008. október 20. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2008. október 20. 1:00 Az írásbeli vizsga időtartama: 20 perc Pótlapok száma Tisztázati Piszkozati OKTATÁSI ÉS
ÉRETTSÉGI VIZSGA 2008. október 20. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2008. október 20. 1:00 Az írásbeli vizsga időtartama: 20 perc Pótlapok száma Tisztázati Piszkozati OKTATÁSI ÉS
ELEKTRONIKAI ALAPISMERETEK
 ÉRETTSÉGI VIZSGA 2012. május 25. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2012. május 25. 8:00 Az írásbeli vizsga időtartama: 20 perc Pótlapok száma Tisztázati Piszkozati NEMZETI ERŐORRÁS
ÉRETTSÉGI VIZSGA 2012. május 25. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2012. május 25. 8:00 Az írásbeli vizsga időtartama: 20 perc Pótlapok száma Tisztázati Piszkozati NEMZETI ERŐORRÁS
ELEKTRONIKAI ALAPISMERETEK
 ÉRETTSÉGI VIZSGA 2010. október 18. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2010. október 18. 1:00 Az írásbeli vizsga időtartama: 20 perc Pótlapok száma Tisztázati Piszkozati NEMZETI ERŐFORRÁS
ÉRETTSÉGI VIZSGA 2010. október 18. ELEKTRONIKAI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI VIZSGA 2010. október 18. 1:00 Az írásbeli vizsga időtartama: 20 perc Pótlapok száma Tisztázati Piszkozati NEMZETI ERŐFORRÁS
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
4. Mérés. Tápegységek, lineáris szabályozók
 4. Mérés Tápegységek, lineáris szabályozók 07.05.0. A régi időkben az elektronika szó hallatán mindenki a világításra és a villanymotorokra asszociált egyből, hiszen ebből állt valaha az elektronika. Később
4. Mérés Tápegységek, lineáris szabályozók 07.05.0. A régi időkben az elektronika szó hallatán mindenki a világításra és a villanymotorokra asszociált egyből, hiszen ebből állt valaha az elektronika. Később
Mûveleti erõsítõk I.
 Mûveleti erõsítõk I. 0. Bevezetés - a mûveleti erõsítõk mûködése A következõ mérésben az univerzális analóg erõsítõelem, az un. "mûveleti erõsítõ" mûködésének alapvetõ ismereteit sajátíthatjuk el. A nyílthurkú
Mûveleti erõsítõk I. 0. Bevezetés - a mûveleti erõsítõk mûködése A következõ mérésben az univerzális analóg erõsítõelem, az un. "mûveleti erõsítõ" mûködésének alapvetõ ismereteit sajátíthatjuk el. A nyílthurkú
OMRON FOTOELEKTROMOS KAPCSOLÓK E3NT
 E3NT Tárgyreflexiós érzékelõ háttér- és elõtér elnyomással 3 m-es érzékelési távolság (tárgyreflexiós) 16 m-es érzékelési távolság (prizmás) Analóg kimenetes típusok Homloklapfûtéssel ellátott kivitelek
E3NT Tárgyreflexiós érzékelõ háttér- és elõtér elnyomással 3 m-es érzékelési távolság (tárgyreflexiós) 16 m-es érzékelési távolság (prizmás) Analóg kimenetes típusok Homloklapfûtéssel ellátott kivitelek
Mérési útmutató Periodikus, nem szinusz alakú jelek értékelése, félvezetős egyenirányítók
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁYI EGYETEM VILLAMOSMÉRÖKI ÉS IFORMATIKAI KAR VILLAMOS EERGETIKA TASZÉK Mérési útmutató Periodikus, nem szinusz alakú jelek értékelése, félvezetős egyenirányítók vizsgálata
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁYI EGYETEM VILLAMOSMÉRÖKI ÉS IFORMATIKAI KAR VILLAMOS EERGETIKA TASZÉK Mérési útmutató Periodikus, nem szinusz alakú jelek értékelése, félvezetős egyenirányítók vizsgálata
Hiszterézis: Egy rendszer kimenete nem csak az aktuális állapottól függ, hanem az állapotváltozás aktuális irányától is.
 1. Mi az érzékelő? Definiálja a típusait (belső/külső). Mit jelent a hiszterézis? Miért nem tudunk közvetlenül mérni, miért származtatunk? Hogyan kapcsolódik össze az érzékelés és a becslés a mérések során?
1. Mi az érzékelő? Definiálja a típusait (belső/külső). Mit jelent a hiszterézis? Miért nem tudunk közvetlenül mérni, miért származtatunk? Hogyan kapcsolódik össze az érzékelés és a becslés a mérések során?
ELEKTRONIKAI ALAPISMERETEK
 ÉRETTSÉGI VIZSGA 2008. május 26. ELEKTRONIKAI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI VIZSGA 2008. május 26. 8:00 Az írásbeli vizsga időtartama: 180 perc Pótlapok száma Tisztázati Piszkozati OKTATÁSI ÉS KULTURÁLIS
ÉRETTSÉGI VIZSGA 2008. május 26. ELEKTRONIKAI ALAPISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI VIZSGA 2008. május 26. 8:00 Az írásbeli vizsga időtartama: 180 perc Pótlapok száma Tisztázati Piszkozati OKTATÁSI ÉS KULTURÁLIS
A 2009-es vizsgákon szereplő elméleti kérdések
 Kivezérelhetőség és teljesítményfokozatok: A 2009-es vizsgákon szereplő elméleti kérdések 1. Ismertesse a B osztályú teljesítményfokozat tulajdonságait (P fmax, P Tmax, P Dmax(1 tr), η Tmax )! (szinuszos
Kivezérelhetőség és teljesítményfokozatok: A 2009-es vizsgákon szereplő elméleti kérdések 1. Ismertesse a B osztályú teljesítményfokozat tulajdonságait (P fmax, P Tmax, P Dmax(1 tr), η Tmax )! (szinuszos
Orvosi jelfeldolgozás. Információ. Információtartalom. Jelek osztályozása De, mi az a jel?
 Orvosi jelfeldolgozás Információ De, mi az a jel? Jel: Információt szolgáltat (információ: új ismeretanyag, amely csökkenti a bizonytalanságot).. Megjelent.. Panasza? információ:. Egy beteg.. Fáj a fogam.
Orvosi jelfeldolgozás Információ De, mi az a jel? Jel: Információt szolgáltat (információ: új ismeretanyag, amely csökkenti a bizonytalanságot).. Megjelent.. Panasza? információ:. Egy beteg.. Fáj a fogam.
4. Mérés. Tápegységek, lineáris szabályozók
 4. Mérés Tápegységek, lineáris szabályozók 0.04.07. A régi időkben az elektronika szó hallatán mindenki a világításra és a villanymotorokra asszociált egyből, hiszen ebből állt valaha az elektronika. Később
4. Mérés Tápegységek, lineáris szabályozók 0.04.07. A régi időkben az elektronika szó hallatán mindenki a világításra és a villanymotorokra asszociált egyből, hiszen ebből állt valaha az elektronika. Később
Energiaminőség- és energiamérés LINETRAXX PEM330/333
 Energiaminőség- és energiamérés LINETRAXX PEM330/333 1/6 Jellemzők Az univerzális mérőkészülék alkalmas villamos hálózat elektromos mennyiségeinek mérésére, megjelenítésére és tárolására. A megjelenített
Energiaminőség- és energiamérés LINETRAXX PEM330/333 1/6 Jellemzők Az univerzális mérőkészülék alkalmas villamos hálózat elektromos mennyiségeinek mérésére, megjelenítésére és tárolására. A megjelenített
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 5. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 5. óra Verzió: 1.1 Utolsó frissítés: 2011. április 12. 1/20 Tartalom I 1 Demók 2 Digitális multiméterek
Mérés és adatgyűjtés 5. óra - levelező Mingesz Róbert Szegedi Tudományegyetem 2011. március 18. MA lev - 5. óra Verzió: 1.1 Utolsó frissítés: 2011. április 12. 1/20 Tartalom I 1 Demók 2 Digitális multiméterek
Gingl Zoltán, Szeged, :44 Elektronika - Diódák, tranzisztorok
 Gingl Zoltán, Szeged, 2016. 2016. 12. 13. 7:44 Elektronika - Diódák, tranzisztorok 1 2016. 12. 13. 7:44 Elektronika - Diódák, tranzisztorok 2 Egyenirányító (rectifier) Mint egy szelep deális dióda Nyitó
Gingl Zoltán, Szeged, 2016. 2016. 12. 13. 7:44 Elektronika - Diódák, tranzisztorok 1 2016. 12. 13. 7:44 Elektronika - Diódák, tranzisztorok 2 Egyenirányító (rectifier) Mint egy szelep deális dióda Nyitó
Elektronika 11. évfolyam
 Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Tájékoztató. Használható segédeszköz: számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított), a 27/2012 (VIII. 27.) NGM rendelet a 29/2016 (III.26.) NMG rendelet által módosított, a 27/2012 (VIII. 27.) NGM rendelet
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított), a 27/2012 (VIII. 27.) NGM rendelet a 29/2016 (III.26.) NMG rendelet által módosított, a 27/2012 (VIII. 27.) NGM rendelet
TxRail-USB Hőmérséklet távadó
 TxRail-USB Hőmérséklet távadó Bevezetés TxRail-USB egy USB-n keresztül konfigurálható DIN sínre szerelhető hőmérséklet jeladó. Lehetővé teszi a bemenetek típusának kiválasztását és konfigurálását, méréstartomány
TxRail-USB Hőmérséklet távadó Bevezetés TxRail-USB egy USB-n keresztül konfigurálható DIN sínre szerelhető hőmérséklet jeladó. Lehetővé teszi a bemenetek típusának kiválasztását és konfigurálását, méréstartomány
Unidrive - a vektorszabályozás alappillére
 Unidrive - a vektorszabályozás alappillére A vektorszabályozás jelenleg a váltakozó áramú ipari hajtások széles körben elfogadott és alkalmazott megoldása, amely kiváló szabályozást nyújt a mai szabványokhoz
Unidrive - a vektorszabályozás alappillére A vektorszabályozás jelenleg a váltakozó áramú ipari hajtások széles körben elfogadott és alkalmazott megoldása, amely kiváló szabályozást nyújt a mai szabványokhoz
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Diszkrét aktív alkatrészek és egyszerû alkalmazásaik. Elmélet A diszkrét aktív elektronikai alkatrészek (dióda, különbözõ tranzisztorok, tirisztor) elméleti
Analóg elektronika - laboratóriumi gyakorlatok. Diszkrét aktív alkatrészek és egyszerû alkalmazásaik. Elmélet A diszkrét aktív elektronikai alkatrészek (dióda, különbözõ tranzisztorok, tirisztor) elméleti
Gingl Zoltán, Szeged, :47 Elektronika - Műveleti erősítők
 Gingl Zoltán, Szeged, 06. 06.. 3. 7:47 Elektronika - Műveleti erősítők 06.. 3. 7:47 Elektronika - Műveleti erősítők Passzív elemek nem lehet erősíteni, csi jeleket kezelni erősen korlátozott műveletek
Gingl Zoltán, Szeged, 06. 06.. 3. 7:47 Elektronika - Műveleti erősítők 06.. 3. 7:47 Elektronika - Műveleti erősítők Passzív elemek nem lehet erősíteni, csi jeleket kezelni erősen korlátozott műveletek
1.zh Kösse össze a két oszlop egy-egy összetartozó fogalmát! pozitív visszacsatolás
 1.zh Kösse össze a két oszlop egy-egy összetartozó fogalmát! gerjedés Bode hurokerősítés nem-invertáló db pozitív visszacsatolás követő egységnyi Kösse össze a két oszlop egy-egy összetartozó fogalmát!
1.zh Kösse össze a két oszlop egy-egy összetartozó fogalmát! gerjedés Bode hurokerősítés nem-invertáló db pozitív visszacsatolás követő egységnyi Kösse össze a két oszlop egy-egy összetartozó fogalmát!
M ű veleti erő sítő k I.
 dátum:... a mérést végezte:... M ű veleti erő sítő k I. mérési jegyző könyv 1. Visszacsatolás nélküli kapcsolások 1.1. Kösse az erősítő invertáló bemenetét a tápfeszültség 0 potenciálú kimenetére! Ezt
dátum:... a mérést végezte:... M ű veleti erő sítő k I. mérési jegyző könyv 1. Visszacsatolás nélküli kapcsolások 1.1. Kösse az erősítő invertáló bemenetét a tápfeszültség 0 potenciálú kimenetére! Ezt
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 9. óra Mingesz Róbert Szegedi Tudományegyetem 2012. április 2. MA - 9. óra Verzió: 2.1 Utolsó frissítés: 2012. április 2. 1/42 Tartalom I 1 További műszerek 2 Multifinkciós műszerek
Mérés és adatgyűjtés 9. óra Mingesz Róbert Szegedi Tudományegyetem 2012. április 2. MA - 9. óra Verzió: 2.1 Utolsó frissítés: 2012. április 2. 1/42 Tartalom I 1 További műszerek 2 Multifinkciós műszerek
Gingl Zoltán, Szeged, dec. 1
 Gingl Zoltán, Szeged, 2017. 17 dec. 1 17 dec. 2 Egyenirányító (rectifier) Mint egy szelep deális dióda Nyitó irányban tökéletes vezető (rövidzár) Záró irányban tökéletes szigetelő (szakadás) Valódi dióda:
Gingl Zoltán, Szeged, 2017. 17 dec. 1 17 dec. 2 Egyenirányító (rectifier) Mint egy szelep deális dióda Nyitó irányban tökéletes vezető (rövidzár) Záró irányban tökéletes szigetelő (szakadás) Valódi dióda:
HSS86 ( ) típusú léptetőmotor meghajtó
 típusú léptetőmotor meghajtó") HSS86 (93.034.028) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
HSS86 (93.034.028) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
Négyszög - Háromszög Oszcillátor Mérése Mérési Útmutató
 ÓBUDAI EGYETEM Kandó Kálmán Villamosmérnöki Kar Híradástechnika Intézet Négyszög - Háromszög Oszcillátor Mérése Mérési Útmutató A mérést végezte: Neptun kód: A mérés időpontja: A méréshez szükséges eszközök:
ÓBUDAI EGYETEM Kandó Kálmán Villamosmérnöki Kar Híradástechnika Intézet Négyszög - Háromszög Oszcillátor Mérése Mérési Útmutató A mérést végezte: Neptun kód: A mérés időpontja: A méréshez szükséges eszközök:
Felhasználói kézikönyv. 3DM860A típusú léptetőmotor meghajtó
 Felhasználói kézikönyv 3DM860A típusú léptetőmotor meghajtó Bevezetés A 3DM860A egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
Felhasználói kézikönyv 3DM860A típusú léptetőmotor meghajtó Bevezetés A 3DM860A egy új generációs léptetőmotor meghajtó, a 32 bites digitális jelfeldolgozásnak (DSP) köszönhetően, lépésvesztés lehetősége
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer