ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 2. DC MOTOROK BEVEZETÉS ÉS STATIKUS MODELLEZÉS
|
|
|
- Éva Orosz
- 5 évvel ezelőtt
- Látták:
Átírás
1 ÉRZÉKELŐK ÉS EVTKOZÓK II. 2. DC MOTOROK EVEZETÉS ÉS STTIKUS MODELLEZÉS Dr. Soumelidis lexandros ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR /2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG






2 Elektromos motorok Főbb típusok: Egyenáramú motor DC motor. Kefenélküli egyenáramú motor LDC motor. Indukciós motor C motor aszinkron motor. Szinkron motor Állandó mágneses szinkron motor PMS motor Léptető motorok Reluktancia motor Kapcsolt reluktancia motor. 2
 Forgórész vasmag és tekercs Kommutátor (forgórész) Kefék (állórész) Forgórész tengely Egyenfeszültségű")
3 DC-motor DC-motor: egyenfeszültségről működtetett állandó mágneses, kommutátoros motor Állórész (stator) Forgórész (rotor) Állandó mágnes pólusai (állórész) Forgórész vasmag és tekercs Kommutátor (forgórész) Kefék (állórész) Forgórész tengely Egyenfeszültségű táplálás 3
4 DC-motor Lorentz erő F = q E + v E elektromos térben indukciójú mágneses térben v sebességgel mozgó töltésre ható erő E a DC motor szempontjából 0. l d α i dx θ df = dq dx dt = dq dt dx = idx + - Kiintegrálva a teljes l hosszra egy l hosszúságú, a mágneses térhez képest α szögben álló egyenes vezetékdarabra ható Lorentz erő nagysága F = il sin α következőkben meghatározzuk meg egy téglalap alakú l d felületű tekercs-elemre (menetre) ható nyomatékot. 4
5 DC-motor Tekintsük a forgórész tekercs egy téglalap alakú, l hosszúságú, d szélességű menetét, amely a indukciójú mágneses térre merőlegesen helyezkedik el: l d α i θ mágneses térre merőleges l hosszúságú szakaszokra ható erő: F = il + - tekercs-elem hosszában két egymással ellentétes áramú vezeték fut egymástól d távolságban, ez nyomatékot képez: Ha a tekercs-elem síkja θ szögben áll a képződő erő irányához képest: Tehát a tekercs-elemre ható nyomaték: T = 2 F d sin θ = F d sin θ 2 T = ild sin θ 5
6 DC-motor 2-pólusú forgórész (a gyakorlatban nem használható) 6

7 DC-motor Történelem: Jedlik Ányos motorja 7





8 DC-motor Legfőbb megkülönböztető jegy a kommutáció módja: Mechanikusan kommutált motorok Kommutátor + kefék lternatív elnevezés: Kefés DC-motor (brushed DC) bronz szén 8



9 DC-motor gyakorlatban használható elrendezés: 3-5- (páratlan) pólusú forgórész Vasmag nélküli (coreless) forgórész 9
10 DC-motor 3-pólusú forgórésszel rendelkező elrendezés vizsgálata: forgórész (rotor) szöghelyzete φ, C +φ 0º -φ legyen az -val jelölt tekercs szögeltérése a kefék által meghatározott a motor testéhez rögzített szöghelyzethez képest. Feltételezés: az egyik kommutációs pont 0 rotor-állásnál található, ezt tekintjük az 1. fázis kezdőpontjának. forgórész egy teljes 360º-os körbefordulása 6 fázis alatt zajlik le. 10
11 DC-motor 1. fázis 0º φ < 60º C közvetlenül kommutáció után C C következő kommutáció előtt 60º φ < 120º 2. fázis C C C 11
12 DC-motor 3. fázis C C C 120º φ < 180º közvetlenül kommutáció után következő kommutáció előtt 180º φ < 240º 4. fázis C C C 12
13 DC-motor 5. fázis C C C 240º φ < 300º közvetlenül kommutáció után következő kommutáció előtt 300º φ < 360º 6. fázis C C C 13
 motor")
14 DC-motor Faulhaber Vasmag nélküli (coreless) motor 14

15 DC-motor Faulhaber Lapos (flat) coreless motor integrált hajtóművel 15

16 DC-motor Maxon Vasmag nélküli forgórészes DC motor integrált bolygóműves hajtóművel és inkrementális optikai jeladóval (encoder) 16
 táplálású motorok.")
17 DC-motor Megjegyzések: Egyenfeszültségről más motorokat is táplálnak ma szinte minden motortípust pl. az C motort is. Nem csak állandó mágnesű DC motorok léteznek: az állórész is tartalmazhat elektromágnest soros és parallel(sönt) táplálású motorok. Vannak ugyanilyen szerkezetű váltakozó feszültségről táplált motorok (univerzális motorok) pl. hálózati táplálású kézi fúrógép motorja 17
18 DC motor irányítása Irányítási alapfeladatok: Vezérlések: ablakmozgató, ablaktörlő motor, zármotor központi zárhoz (járműves példák). Fordulatszám-szabályozás fordulatszámmérésen alapuló visszacsatolt irányítás. Hajtás-szabályozás - nyomaték-fordulatszám szabályozás. Szervo-szabályozás szög- vagy pozíció szabályozás. Megjelenési formák: Rotációs és lineáris hajtások és szervók. 18
19 Mérőeszközök Szögmérés: bszolút és inkrementális jeladók. Optikai jeladók Mágneses forgó jeladók. Rezolverek. Elektromos eszközök: potenciométerek. Fordulatszám (szögsebesség) jeladók: Mágneses elvű jeladók: tachogenerátor. Időmérésen alapuló eszközök: optikai és mágneses impulzusszámlálók. Inerciális elvű jeladók: giro szenzorok (MEMS). Nyomaték jeladók 19

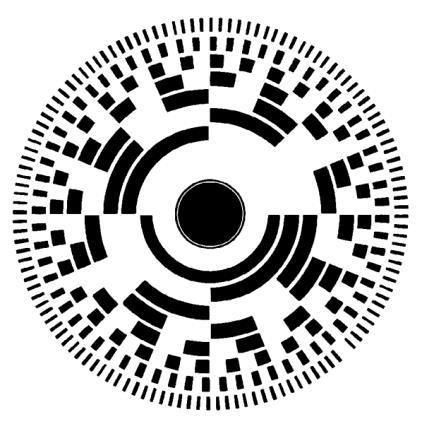
20 Mérőeszközök Optikai szögjeladó (encoder): Inkrementális bszolút 20
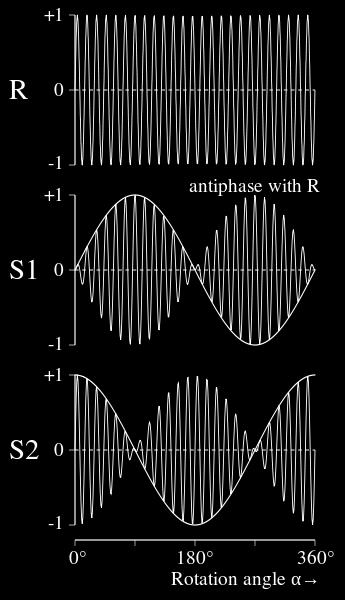


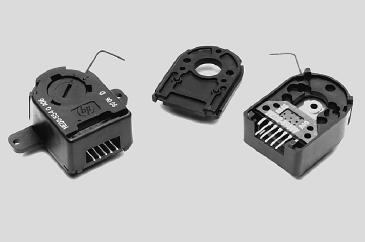
21 Mérőeszközök Rezolver: Forgó transzformátor 21
 Motor hátsó")

22 Mérőeszközök Mágneses abszolút szögjeladó: MS (ustria) Motor hátsó tengely Mágnes foglalat Neodímium mágnes Áramköri panel Csatlakozó Érzékelő IC 22
 Master")


23 Mérőeszközök Mágneses abszolút szögjeladó: off axis ic-haus (DE) Master track Nonius track nonius track-en 1-el kevesebb domén Pozíciómérés egy-egy doménen belül 14 bit felbontással domének sorszáma egyértelműen meghatározható az mért értékekből 23
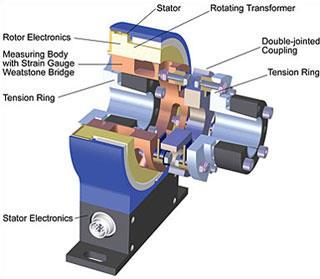

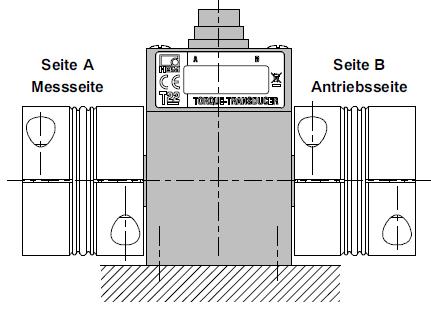
24 Mérőeszközök Nyomatékmérő szenzor: 24
 e = ω sin θ t")
25 DC-motor modellezése Faraday törvénye indukció: e = dφ dt mágneses térben mozgó áramhurok Φ az áramhurok felületén átfolyó fluxus e = d dt cos θ t = θ sin θ t = ω sin θ t ω a forgórész forgási körfrekvenciája Mágneses térben mozgó áramhurkon előálló feszültség: indukált feszültség (elektromotoros erő) e = ω sin θ t 25
26 DC-motor modellezése z indukált feszültség: Összehasonlítva a nyomaték kifejezésével: e = ω sin θ t T = ild sin θ DC-motornál: állandó indukció (fluxus) minden szöghelyzetben jó közelítés. = const. = ld. kommutáció miatt az indukált feszültség és nyomaték fél-periódusonként előjelet vált ( kétutasan egyenirányítódnak), így átlaguk: e = 2 ω π e = k e ω k e EMF tényező effektív átlagértékük k e = k m T = 2 i π T = k m i k m nyomatéktényező 26
27 DC-motor leírása motor elektromos egyenlete: v r t v r = L r di r dt + R ri r + v e R r i r L r v e v r a forgórész kapocsfeszültsége i r a forgórész árama R r a forgórész villamos ellenállása L r a forgórész induktivitása v e elektromotoros erő indukált feszültség T m a motor által kifejtett nyomaték ω - a motor fordulatszáma (szögsebesség) k m - nyomatéktényező Állandósult állapotban bármiféle súrlódás elhanyagolásával T m = k m u R r k 2 m ω r R r 27
28 DC motor leírása z állandó mágneses DC motorok konstrukciója: iztosítja, hogy az álló- és forgórész közti légrésben a kialakuló mágneses fluxus szöghelyzettől függetlenül állandó Következmény: a k e, k m konstansok és jó közelítéssel érvényes k e [V/rad/s] EMF-állandó k m [Nm/] nyomatéktényező SI mértékrendszerben azonosak v e = k m ω T m = k m i r 28
29 DC motor statikus leírása Állandósult állapotban bármiféle súrlódás elhanyagolásával v r = L r di r dt + R ri r + v e v e = k m ω T m = k m i r T m = k m v R r k 2 m ω r R r Állandósult állapot: induktív hatás elhanyagolva, a kapocsfeszültség állandó, a motort terhelő nyomaték állandó. 29
30 DC motor statikus leírása Tm T m0 = k m R r v r nyugalmi nyomaték kapocsfeszültséggel paraméterezett egyenes-sereg vr ω max = v r k m m üresjárási fordulatszám 30
31 DC motor statikus leírása Teljesítményviszonyok: P i felvett (villamos) teljesítmény P d ohmos ellenálláson disszipált teljesítmény P o leadott (mechanikai) teljesítmény P i = v r i r i r = v r k m ω R r P i = v r v r k m ω R r P o = T m ω = k m v R r ω k 2 m ω 2 r R r fordított másodfokú parabola lokális maximuma van Zérushelyei: ω = 0 ω = v r k m normál működési tartományának határai (1 síknegyed 1q) 31
32 DC motor statikus leírása maximális teljesítményű pont: dp o dω = 0 ω = v r 2k m v r 2k m ω = 0 P o max = v r 2 4R r Hatásfok: η = P o P i = k mω v r k m ω v r v r k m ω = k mω v r Lineáris összefüggés: maximum a tartomány határán ω = v r k m ahol a hatásfok 1. Ez nem túl életszerű eredmény: túlegyszerűsített modell. 32
33 DC motor statikus leírása Nyomaték Teljesítmény Hatásfok 33
34 DC motor statikus leírása Megoldás: a súrlódás figyelembe vétele: statikus és fordulatszámfüggő (viszkózus) súrlódás Tm Tm max T e hatásos nyomaték motor forgórész által kifejtett nyomaték és a veszteségi (súrlódási) nyomaték különbsége Te(ω) max Tµ =µmωmax I 0 nyugalmi áram T 0 alapnyomaték max T0=I0km 34
35 DC motor statikus leírása Teljesítményviszonyok statikus súrlódás esetén: i r = I 0 + v r k m ω R r P i = v r I 0 + v r k m ω R r = v r R r v r + R r I 0 k m ω T m = k m v R r k 2 m ω + T r R 0 r P e = k m v R r ω T 0 ω k 2 m ω 2 r R r P e = k m R r ω v r R r I 0 k m ω Működési tartomány: Másodfokú parabola maximuma van. ω = 0 ω = v r R r I 0 ω = v r R r I 0 P k m 2k max o = v r R r I 0 m 4R r 2 35
36 DC motor statikus leírása Hatásfok: a = v r R r I 0 b = v r + R r I 0 c = k m v r η = P e = k mω v r R r I 0 k m ω P i v r v r +R r I 0 k m ω jelölésekkel: η ω = c aω k mω 2 b k m ω η ω = c a 2k mω b k m ω + k m aω k m ω 2 b k m ω 2 Értelmezési tartomány: ω = 0 ω = v r R r I 0 k m 0-tól az üresjárási körfrekvenciáig = c k m 2 ω 2 2bk m ω + ab b k m ω 2 szélsőértékek helye: ω 1,2 = 2bk m ± k m 2 ω 2 2bk m ω + ab = 0 4b 2 k m 2 4k m 2 ab 2k m 2 = b ± b b a k m z értelmezési tartományban: 1 lokális maximum ω m = b b b a = v r +R r I 0 2R r I 0 v r +R r I 0 k m k m 36
37 DC motor statikus leírása Nyomaték Teljesítmény Hatásfok 37

38 DC motor statikus leírása Nyomaték Teljesítmény V r kapocsfeszültségtől való függése Hatásfok 38

39 DC motor statikus leírása 39

40 UDPESTI MŰSZKI ÉS GZDSÁGTUDOMÁNYI EGYETEM Dr. Soumelidis lexandros ME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KR /2017/INTFIN SZÁMÚ EMMI ÁLTL TÁMOGTOTT TNNYG
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Elektrotechnika. 11. előadás. Összeállította: Dr. Hodossy László
 11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
11. előadás Összeállította: Dr. Hodossy László 1. Szerkezeti felépítés 2. Működés 3. Működés 4. Armatúra reakció 5. Armatúra reakció 6. Egyenáramú gépek osztályozása 7. Külső 8. Külső. 9. Soros. 10. Soros
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Gyakorlat 30B-14. a F L = e E + ( e)v B képlet, a gravitációs erőt a (2.1) G = m e g (2.2)
v B képlet, a gravitációs erőt a (2.1) G = m e g (2.2)") 2. Gyakorlat 30B-14 Az Egyenlítőnél, a földfelszín közelében a mágneses fluxussűrűség iránya északi, nagysága kb. 50µ T,az elektromos térerősség iránya lefelé mutat, nagysága; kb. 100 N/C. Számítsuk ki,
2. Gyakorlat 30B-14 Az Egyenlítőnél, a földfelszín közelében a mágneses fluxussűrűség iránya északi, nagysága kb. 50µ T,az elektromos térerősség iránya lefelé mutat, nagysága; kb. 100 N/C. Számítsuk ki,
1 kérdés. Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt május 13. szombat Teszt feladatok 2017 Előzetes megtekintés
 Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK Dr. Soumelidis Alexandros 2019.04.16. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG AC motorok Félrevezető
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 8. AC MOTOROK Dr. Soumelidis Alexandros 2019.04.16. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG AC motorok Félrevezető
Egyenáramú gépek. Felépítés
 Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
Egyenármú gépek Felépítés 1. Állórész koszorú 2. Főpólus 3. Segédpólus 4. Forgórész koszorú 5. Armtúr tekercselés 6. Pólus fluxus 7. Kompenzáló tekercselés 1 Állórész - Tömör vstest - Tömör vs pólus -
azonos sikban fekszik. A vezetőhurok ellenállása 2 Ω. Számítsuk ki a hurok teljes 4.1. ábra ábra
 4. Gyakorlat 31B-9 A 31-15 ábrán látható, téglalap alakú vezetőhurok és a hosszúságú, egyenes vezető azonos sikban fekszik. A vezetőhurok ellenállása 2 Ω. Számítsuk ki a hurok teljes 4.1. ábra. 31-15 ábra
4. Gyakorlat 31B-9 A 31-15 ábrán látható, téglalap alakú vezetőhurok és a hosszúságú, egyenes vezető azonos sikban fekszik. A vezetőhurok ellenállása 2 Ω. Számítsuk ki a hurok teljes 4.1. ábra. 31-15 ábra
MÁGNESES INDUKCIÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK
 MÁGNESES NDUKCÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK Mágneses indukció Mozgási indukció v B Vezetőt elmozdítunk mágneses térben B-re merőlegesen, akkor a vezetőben áram keletkezik, melynek iránya az őt létrehozó
MÁGNESES NDUKCÓ VÁLTÓÁRAM VÁLTÓÁRAMÚ HÁLÓZATOK Mágneses indukció Mozgási indukció v B Vezetőt elmozdítunk mágneses térben B-re merőlegesen, akkor a vezetőben áram keletkezik, melynek iránya az őt létrehozó
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Teljesítm. ltség. U max
 1 tmény a váltakozó áramú körben A váltakozv ltakozó feszülts ltség Áttekinthetően szemlélteti a feszültség pillanatnyi értékét a forgóvektoros ábrázolás, mely szerint a forgó vektor y-irányú vetülete
1 tmény a váltakozó áramú körben A váltakozv ltakozó feszülts ltség Áttekinthetően szemlélteti a feszültség pillanatnyi értékét a forgóvektoros ábrázolás, mely szerint a forgó vektor y-irányú vetülete
Elektrotechnika. Ballagi Áron
 Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
Az elektromágneses indukció jelensége
 Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Elektrotechnika. Dr. Hodossy László előadás
 Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
(Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.)
 könyvéből vannak.)") Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Az aszinkron és a szinkron gépek külső mágnesének vasmagja, -amelyik általában az
 8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
8 FORGÓMEZŐS GÉPEK. Az aszinkron és a szinkron géek külső mágnesének vasmagja, -amelyik általában az állórész,- hengergyűrű alakú. A D átmérőjű belső felületén tengelyirányban hornyokat mélyítenek, és
FIZIKA II. Az áram és a mágneses tér kapcsolata
 Az áram és a mágneses tér kapcsolata Mágneses tér jellemzése: Mágneses térerősség: H (A/m) Mágneses indukció: B (T = Vs/m 2 ) B = μ 0 μ r H 2Seres.Istvan@gek.szie.hu Sztatikus terek Elektrosztatikus tér:
Az áram és a mágneses tér kapcsolata Mágneses tér jellemzése: Mágneses térerősség: H (A/m) Mágneses indukció: B (T = Vs/m 2 ) B = μ 0 μ r H 2Seres.Istvan@gek.szie.hu Sztatikus terek Elektrosztatikus tér:
Kirchhoff 2. törvénye (huroktörvény) szerint az áramkörben levő elektromotoros erők. E i = U j (3.1)
 szerint az áramkörben levő elektromotoros erők. E i = U j (3.1)") 3. Gyakorlat 29A-34 Egy C kapacitású kondenzátort R ellenálláson keresztül sütünk ki. Mennyi idő alatt csökken a kondenzátor töltése a kezdeti érték 1/e 2 ed részére? Kirchhoff 2. törvénye (huroktörvény)
3. Gyakorlat 29A-34 Egy C kapacitású kondenzátort R ellenálláson keresztül sütünk ki. Mennyi idő alatt csökken a kondenzátor töltése a kezdeti érték 1/e 2 ed részére? Kirchhoff 2. törvénye (huroktörvény)
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált
 Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Az elektromos töltések eloszlása atomokban, molekulákban, ionokon belül és a vegyületekben. Vezetők, félvezetők és szigetelők molekuláris szerkezete.
 Szakképesítés: Log Autószerelő - 54 525 02 iszti Tantárgy: Elektrotechnikaelektronika Modul: 10416-12 Közlekedéstechnikai alapok Osztály: 11.a Évfolyam: 11. 36 hét, heti 2 óra, évi 72 óra Ok Dátum: 2013.09.21
Szakképesítés: Log Autószerelő - 54 525 02 iszti Tantárgy: Elektrotechnikaelektronika Modul: 10416-12 Közlekedéstechnikai alapok Osztály: 11.a Évfolyam: 11. 36 hét, heti 2 óra, évi 72 óra Ok Dátum: 2013.09.21
= Φ B(t = t) Φ B (t = 0) t
 Φ B (t = 0) t") 4. Gyakorlat 32B-3 Egy ellenállású, r sugarú köralakú huzalhurok a B homogén mágneses erőtér irányára merőleges felületen fekszik. A hurkot gyorsan, t idő alatt 180 o -kal átforditjuk. Számitsuk ki, hogy
4. Gyakorlat 32B-3 Egy ellenállású, r sugarú köralakú huzalhurok a B homogén mágneses erőtér irányára merőleges felületen fekszik. A hurkot gyorsan, t idő alatt 180 o -kal átforditjuk. Számitsuk ki, hogy
Elektromechanika. 6. mérés. Teljesítményelektronika
 Elektromechanika 6. mérés Teljesítményelektronika 1. Rajzolja fel az ideális és a valódi dióda feszültségáram jelleggörbéjét! Valódi dióda karakterisztikája: Ideális dióda karakterisztikája (3-as jelű
Elektromechanika 6. mérés Teljesítményelektronika 1. Rajzolja fel az ideális és a valódi dióda feszültségáram jelleggörbéjét! Valódi dióda karakterisztikája: Ideális dióda karakterisztikája (3-as jelű
4. FEJEZET MOTORHAJTÁSOK
 Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
Tantárgy: TELJESÍTMÉNYELEKTRONIKA Tanár: Dr. Burány Nándor Tanársegéd: Mr. Divéki Szabolcs 5. félév Óraszám: 2+2 1 4. FEJEZET MOTORHAJTÁSOK Széles skála: o W...MW, o precíz pozícionálás...goromba sebességvezérlés.
MIB02 Elektronika 1. Passzív áramköri elemek
 MIB02 Elektronika 1. Passzív áramköri elemek ELLENÁLLÁSOK -állandóértékű ellenállások - változtatható ellenállások - speciális ellenállások (PTK, NTK, VDR) Állandó értékű ellenállás Felépítés: szigetelő
MIB02 Elektronika 1. Passzív áramköri elemek ELLENÁLLÁSOK -állandóértékű ellenállások - változtatható ellenállások - speciális ellenállások (PTK, NTK, VDR) Állandó értékű ellenállás Felépítés: szigetelő
Fizika 1 Elektrodinamika beugró/kis kérdések
 Fizika 1 Elektrodinamika beugró/kis kérdések 1.) Írja fel a 4 Maxwell-egyenletet lokális (differenciális) alakban! rot = j+ D rot = B div B=0 div D=ρ : elektromos térerősség : mágneses térerősség D : elektromos
Fizika 1 Elektrodinamika beugró/kis kérdések 1.) Írja fel a 4 Maxwell-egyenletet lokális (differenciális) alakban! rot = j+ D rot = B div B=0 div D=ρ : elektromos térerősség : mágneses térerősség D : elektromos
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet
 Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
Az önindukciós és kölcsönös indukciós tényező meghatározása Az Elektrotechnika tárgy 7. sz. laboratóriumi gyakorlatához Mérésvezetői segédlet A hallgatói útmutatóban vázolt program a csoport felkészültsége
= f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni.
 44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
44 SZINKRON GÉPEK. Szögsebességük az állórész f 1 frekvenciájához mereven kötődik az ω 2 π = f p képlet szerint. A gép csak ezen a szögsebességen tud állandósult nyomatékot kifejteni. Az állórész felépítése
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
Mágneses erőtér. Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat. A villamos forgógépek mutatós műszerek működésének alapja
 erő hat. A villamos forgógépek mutatós műszerek működésének alapja") Mágneses erőtér Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat A villamos forgógépek mutatós műszerek működésének alapja Magnetosztatikai mező: nyugvó állandó mágnesek és egyenáramok időben
Mágneses erőtér Ahol az áramtól átjárt vezetőre (vagy mágnestűre) erő hat A villamos forgógépek mutatós műszerek működésének alapja Magnetosztatikai mező: nyugvó állandó mágnesek és egyenáramok időben
Az elektromágneses indukció jelensége
 Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Az elektromágneses indukció jelensége Korábban láttuk, hogy az elektromos áram hatására mágneses tér keletkezik (Ampère-féle gerjesztési törvény) Kérdés, hogy vajon ez megfordítható-e, és a mágneses tér
Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, december 05. Feladatok (maximum 3x6 pont=18 pont)
") 1. 2. 3. Mondat E1 E2 NÉV: Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, 2017. december 05. Neptun kód: Aláírás: g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus /
1. 2. 3. Mondat E1 E2 NÉV: Gépészmérnöki alapszak, Mérnöki fizika 2. ZH, 2017. december 05. Neptun kód: Aláírás: g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus /
TARTALOMJEGYZÉK. Előszó 9
 TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
3.1. ábra ábra
 3. Gyakorlat 28C-41 A 28-15 ábrán két, azonos anyagból gyártott ellenállás látható. A véglapokat vezető 3.1. ábra. 28-15 ábra réteggel vonták be. Tételezzük fel, hogy az ellenállások belsejében az áramsűrűség
3. Gyakorlat 28C-41 A 28-15 ábrán két, azonos anyagból gyártott ellenállás látható. A véglapokat vezető 3.1. ábra. 28-15 ábra réteggel vonták be. Tételezzük fel, hogy az ellenállások belsejében az áramsűrűség
EGYFÁZISÚ VÁLTAKOZÓ ÁRAM
 VANYSEEŐ KÉPÉS 0 5 EGYFÁSÚ VÁTAKOÓ ÁAM ÖSSEÁÍTOTTA NAGY ÁSÓ MÉNÖKTANÁ - - Tartalomjegyzék Váltakozó áram fogalma és jellemzői...3 Szinuszos lefolyású váltakozó feszültség előállítása...3 A szinuszos lefolyású
VANYSEEŐ KÉPÉS 0 5 EGYFÁSÚ VÁTAKOÓ ÁAM ÖSSEÁÍTOTTA NAGY ÁSÓ MÉNÖKTANÁ - - Tartalomjegyzék Váltakozó áram fogalma és jellemzői...3 Szinuszos lefolyású váltakozó feszültség előállítása...3 A szinuszos lefolyású
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Időben állandó mágneses mező jellemzése
 Időben állandó mágneses mező jellemzése Mágneses erőhatás Mágneses alapjelenségek A mágnesek egymásra és a vastárgyakra erőhatást fejtenek ki. vonzó és taszító erő Mágneses pólusok északi pólus: a mágnestű
Időben állandó mágneses mező jellemzése Mágneses erőhatás Mágneses alapjelenségek A mágnesek egymásra és a vastárgyakra erőhatást fejtenek ki. vonzó és taszító erő Mágneses pólusok északi pólus: a mágnestű
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 9. LÉPTETŐMOTOROK Dr. Soumelidis Alexandros 2019.04.24. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Léptetőmotorok A
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet. Elektrotechnika
 Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Budapest Műszaki Főiskola Bánki Donát Gépész és Biztonságtechnikai Kar Mechatronikai és Autotechnikai Intézet Elektrotechnika Különleges motorok Összeállította: Lukács Attila PhD hallgató (BME MOGI) és
Érzékelők és beavatkozók
 Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
Érzékelők és beavatkozók AC motorok egyetemi docens - 1 - AC motorok Félrevezető elnevezés, mert: Arra utal, hogy váltakozó árammal működő motorokról van szó, pedig ma vannak egyenfeszültségről táplált
1. Milyen módszerrel ábrázolhatók a váltakozó mennyiségek, és melyiknek mi az előnye?
 .. Ellenőrző kérdések megoldásai Elméleti kérdések. Milyen módszerrel ábrázolhatók a váltakozó mennyiségek, és melyiknek mi az előnye? Az ábrázolás történhet vonaldiagramban. Előnye, hogy szemléletes.
.. Ellenőrző kérdések megoldásai Elméleti kérdések. Milyen módszerrel ábrázolhatók a váltakozó mennyiségek, és melyiknek mi az előnye? Az ábrázolás történhet vonaldiagramban. Előnye, hogy szemléletes.
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
1. fejezet. Gyakorlat C-41
 1. fejezet Gyakorlat 3 1.1. 28C-41 A 1.1 ábrán két, azonos anyagból gyártott ellenállás látható. A véglapokat vezető réteggel vonták be. Tételezzük fel, hogy az ellenállások belsejében az áramsűrűség bármely,
1. fejezet Gyakorlat 3 1.1. 28C-41 A 1.1 ábrán két, azonos anyagból gyártott ellenállás látható. A véglapokat vezető réteggel vonták be. Tételezzük fel, hogy az ellenállások belsejében az áramsűrűség bármely,
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
-2σ. 1. A végtelen kiterjedésű +σ és 2σ felületi töltéssűrűségű síklapok terében az ábrának megfelelően egy dipól helyezkedik el.
 1. 2. 3. Mondat E1 E2 Össz Energetikai mérnöki alapszak Mérnöki fizika 2. ZH NÉV:.. 2018. május 15. Neptun kód:... g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus
1. 2. 3. Mondat E1 E2 Össz Energetikai mérnöki alapszak Mérnöki fizika 2. ZH NÉV:.. 2018. május 15. Neptun kód:... g=10 m/s 2 ; ε 0 = 8.85 10 12 F/m; μ 0 = 4π 10 7 Vs/Am; c = 3 10 8 m/s Előadó: Márkus
KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS
 KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS 1 EGYENLETES KÖRMOZGÁS Pálya kör Út ív Definíció: Test körpályán azonos irányban haladva azonos időközönként egyenlő íveket tesz meg. Periodikus mozgás 2 PERIODICITÁS
KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS 1 EGYENLETES KÖRMOZGÁS Pálya kör Út ív Definíció: Test körpályán azonos irányban haladva azonos időközönként egyenlő íveket tesz meg. Periodikus mozgás 2 PERIODICITÁS
1. feladat R 1 = 2 W R 2 = 3 W R 3 = 5 W R t1 = 10 W R t2 = 20 W U 1 =200 V U 2 =150 V. Megoldás. R t1 R 3 R 1. R t2 R 2
 1. feladat = 2 W R 2 = 3 W R 3 = 5 W R t1 = 10 W R t2 = 20 W U 1 =200 V U 2 =150 V U 1 R 2 R 3 R t1 R t2 U 2 R 2 a. Számítsd ki az R t1 és R t2 ellenállásokon a feszültségeket! b. Mekkora legyen az U 2
1. feladat = 2 W R 2 = 3 W R 3 = 5 W R t1 = 10 W R t2 = 20 W U 1 =200 V U 2 =150 V U 1 R 2 R 3 R t1 R t2 U 2 R 2 a. Számítsd ki az R t1 és R t2 ellenállásokon a feszültségeket! b. Mekkora legyen az U 2
EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
 BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók
 Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 6. BLDC (PMS) MOTOROK
 MOTOROK") ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 6. BLDC (PMS) MOTOROK Dr. Soumelidis Alexandros 2019.04.03. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Brushless DC
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 6. BLDC (PMS) MOTOROK Dr. Soumelidis Alexandros 2019.04.03. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Brushless DC
Unidrive - a vektorszabályozás alappillére
 Unidrive - a vektorszabályozás alappillére A vektorszabályozás jelenleg a váltakozó áramú ipari hajtások széles körben elfogadott és alkalmazott megoldása, amely kiváló szabályozást nyújt a mai szabványokhoz
Unidrive - a vektorszabályozás alappillére A vektorszabályozás jelenleg a váltakozó áramú ipari hajtások széles körben elfogadott és alkalmazott megoldása, amely kiváló szabályozást nyújt a mai szabványokhoz
Elektronikus indítású, energiatakarékos szinkron kismotor
 Elektronikus indítású, energiatakarékos szinkron kismotor Dr. Lelkes András 1, Dr. Szabó Loránd 2 1) ebm Werke GmbH & Co. KG, Mulfingen / Németország lelkes@ieee.org 2) Kolozsvári Műszaki Egyetem / Románia
Elektronikus indítású, energiatakarékos szinkron kismotor Dr. Lelkes András 1, Dr. Szabó Loránd 2 1) ebm Werke GmbH & Co. KG, Mulfingen / Németország lelkes@ieee.org 2) Kolozsvári Műszaki Egyetem / Románia
LI 2 W = Induktív tekercsek és transzformátorok
 Induktív tekercsek és transzformátorok A tekercsek olyan elektronikai alkatrészek, amelyek mágneses terükben jelentős elektromos energiát képesek felhalmozni. A mágneses tér a tekercset alkotó vezetéken
Induktív tekercsek és transzformátorok A tekercsek olyan elektronikai alkatrészek, amelyek mágneses terükben jelentős elektromos energiát képesek felhalmozni. A mágneses tér a tekercset alkotó vezetéken
2.4 Fizika - Elektromosságtan 2.4.7 Elektromotor-generátor tanulói rendszer
 Kísérletek az elektromotor-generátor készlettel Az elektromotor-generátor készlet egy moduláris eszközrendszer a fizikai és műszaki összefüggéseket kidolgozó tanulói kísérletekhez, az elektromotorokat,
Kísérletek az elektromotor-generátor készlettel Az elektromotor-generátor készlet egy moduláris eszközrendszer a fizikai és műszaki összefüggéseket kidolgozó tanulói kísérletekhez, az elektromotorokat,
7. L = 100 mh és r s = 50 Ω tekercset 12 V-os egyenfeszültségű áramkörre kapcsolunk. Mennyi idő alatt éri el az áram az állandósult értékének 63 %-át?
 1. Jelöld H -val, ha hamis, I -vel ha igaz szerinted az állítás!...két elektromos töltés között fellépő erőhatás nagysága arányos a két töltés nagyságával....két elektromos töltés között fellépő erőhatás
1. Jelöld H -val, ha hamis, I -vel ha igaz szerinted az állítás!...két elektromos töltés között fellépő erőhatás nagysága arányos a két töltés nagyságával....két elektromos töltés között fellépő erőhatás
Hajtástechnika. Villanymotorok. Egyenáramú motorok. Váltóáramú motorok
 Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
Hajtástechnika Villanymotorok Egyenáramú motorok Váltóáramú motorok Soros gerjesztésű Párhuzamos gerjesztésű Külső gerjesztésű Vegyes gerjesztésű Állandó mágneses gerjesztésű Aszinkron motorok Szinkron
MÁGNESESSÉG. Türmer Kata
 MÁGESESSÉG Türmer Kata HOA? év: görög falu Magnesia, sok természetes mágnes Ezeket iodestones (iode= vonz), magnetitet tartalmaznak, Fe3O4. Kínaiak: iránytű, két olyan hely ahol maximum a vonzás Kínaiak
MÁGESESSÉG Türmer Kata HOA? év: görög falu Magnesia, sok természetes mágnes Ezeket iodestones (iode= vonz), magnetitet tartalmaznak, Fe3O4. Kínaiak: iránytű, két olyan hely ahol maximum a vonzás Kínaiak
2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel!
 Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel!") 1.) Hány Coulomb töltést tartalmaz a 72 Ah ás akkumulátor? 2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel! a.) alumínium b.) ezüst c.)
1.) Hány Coulomb töltést tartalmaz a 72 Ah ás akkumulátor? 2.) Fajlagos ellenállásuk nagysága alapján állítsd sorrendbe a következő fémeket! Kezd a legjobban vezető fémmel! a.) alumínium b.) ezüst c.)
A kommutáció elve. Gyűrűs tekercselésű forgórész. Gyűrűs tekercselésű kommutátoros forgórész
 Egyeáramú gépek 008 É É É + Φp + Φp + Φp - - - D D D A kommutáció elve Gyűrűs tekercselésű forgórész Gyűrűs tekercselésű kommutátoros forgórész 1 Egyeáramú gép forgórésze a) b) A feszültség időbeli változása
Egyeáramú gépek 008 É É É + Φp + Φp + Φp - - - D D D A kommutáció elve Gyűrűs tekercselésű forgórész Gyűrűs tekercselésű kommutátoros forgórész 1 Egyeáramú gép forgórésze a) b) A feszültség időbeli változása
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás
 E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
E-Laboratórium 2 A léptetőmotorok alkalmazásai Elméleti leírás 1. Bevezető A szinkronmotorok csoportjában egy külön helyet a léptetőmotor foglal el, aminek a diszkrét működését, vagyis a léptetést, egy
Számítási feladatok megoldással a 6. fejezethez
 Számítási feladatok megoldással a 6. fejezethez. Egy szinuszosan változó áram a polaritás váltás után μs múlva éri el első maximumát. Mekkora az áram frekvenciája? T = 4 t = 4 = 4ms 6 f = = =,5 Hz = 5
Számítási feladatok megoldással a 6. fejezethez. Egy szinuszosan változó áram a polaritás váltás után μs múlva éri el első maximumát. Mekkora az áram frekvenciája? T = 4 t = 4 = 4ms 6 f = = =,5 Hz = 5
VI. fejezet. Az alapvető elektromechanikai átalakítók működési elvei
 VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Származtatása frekvencia-feltételből (általános áttekintés) A forgó mező tulajdonságai (már láttuk) III. A nyomatékképzés feltétele (alapesetben)
VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Származtatása frekvencia-feltételből (általános áttekintés) A forgó mező tulajdonságai (már láttuk) III. A nyomatékképzés feltétele (alapesetben)
Legutolsó frissítés ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL
 Legutolsó frissítés 2013.05.24. Tárgykód: BMEVIAUM012 ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL Fontos megjegyzés: a felkészüléshez ajánljuk a www.get.bme.hu hálózati
Legutolsó frissítés 2013.05.24. Tárgykód: BMEVIAUM012 ZÁRÓVIZSGA KÉRDÉSEK a VÁLOGATOTT FEJEZETEK AZ ELEKTROTECHNIKÁBAN CÍMŰ MSc TÁRGYBÓL Fontos megjegyzés: a felkészüléshez ajánljuk a www.get.bme.hu hálózati
21. laboratóriumi gyakorlat. Rövid távvezeték állandósult üzemi viszonyainak vizsgálata váltakozóáramú
 1. laboratóriumi gyakorlat Rövid távvezeték állandósult üzemi viszonyainak vizsgálata váltakozóáramú kismintán 1 Elvi alapok Távvezetékek villamos számításához, üzemi viszonyainak vizsgálatához a következő
1. laboratóriumi gyakorlat Rövid távvezeték állandósult üzemi viszonyainak vizsgálata váltakozóáramú kismintán 1 Elvi alapok Távvezetékek villamos számításához, üzemi viszonyainak vizsgálatához a következő
1. Feladat. Megoldás. Számítsd ki az ellenállás-hálózat eredő ellenállását az A B az A C és a B C pontok között! Mindegyik ellenállás értéke 100 Ω.
 1. Feladat Számítsd ki az ellenállás-hálózat eredő ellenállását az A B az A C és a B C pontok között! Mindegyik ellenállás értéke 100 Ω. A 1 2 B 3 4 5 6 7 A B pontok között C 13 = 1 + 3 = 2 = 200 Ω 76
1. Feladat Számítsd ki az ellenállás-hálózat eredő ellenállását az A B az A C és a B C pontok között! Mindegyik ellenállás értéke 100 Ω. A 1 2 B 3 4 5 6 7 A B pontok között C 13 = 1 + 3 = 2 = 200 Ω 76
71. A lineáris és térfogati hőtágulási tényező közötti összefüggés:
 Összefüggések: 69. Lineáris hőtágulás: Hosszváltozás l = α l 0 T Lineáris hőtágulási Kezdeti hossz Hőmérsékletváltozás 70. Térfogati hőtágulás: Térfogatváltozás V = β V 0 T Hőmérsékletváltozás Térfogati
Összefüggések: 69. Lineáris hőtágulás: Hosszváltozás l = α l 0 T Lineáris hőtágulási Kezdeti hossz Hőmérsékletváltozás 70. Térfogati hőtágulás: Térfogatváltozás V = β V 0 T Hőmérsékletváltozás Térfogati
S Z I N K R O N G É P E K
 VILLANYSZERELŐ KÉPZÉS 2 0 1 5 S Z I N K R O N G É P E K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Szinkrongépek működési elve...3 Szinkrongépek felépítése...3 Szinkrongenerátor üresjárási
VILLANYSZERELŐ KÉPZÉS 2 0 1 5 S Z I N K R O N G É P E K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Szinkrongépek működési elve...3 Szinkrongépek felépítése...3 Szinkrongenerátor üresjárási
VI. fejezet. Az alapvető elektromechanikai átalakítók működési elvei
 VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Aszinkron gépek Gépfajták származtatása #: ω r =var Az ún. indukciós gépek forgórészében indukált feszültségek által létrehozott rotoráramok
VI. fejezet Az alapvető elektromechanikai átalakítók működési elvei Aszinkron gépek Gépfajták származtatása #: ω r =var Az ún. indukciós gépek forgórészében indukált feszültségek által létrehozott rotoráramok
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Fizika II. feladatsor főiskolai szintű villamosmérnök szak hallgatóinak. Levelező tagozat
 Fizika. feladatsor főiskolai szintű villamosmérnök szak hallgatóinak Levelező tagozat 1. z ábra szerinti félgömb alakú, ideális vezetőnek tekinthető földelőbe = 10 k erősségű áram folyik be. föld fajlagos
Fizika. feladatsor főiskolai szintű villamosmérnök szak hallgatóinak Levelező tagozat 1. z ábra szerinti félgömb alakú, ideális vezetőnek tekinthető földelőbe = 10 k erősségű áram folyik be. föld fajlagos
Egyenáramú gép mérése
 Egyenáramú gép mérése Villamos laboratórium 1. BMEVIVEA042 Németh Károly Kádár István Hajdu Endre 2016. szeptember.1. Tartalomjegyzék 1. A laboratóriumi mérés célja... 1 2. Elméleti alapismeretek, a méréssel
Egyenáramú gép mérése Villamos laboratórium 1. BMEVIVEA042 Németh Károly Kádár István Hajdu Endre 2016. szeptember.1. Tartalomjegyzék 1. A laboratóriumi mérés célja... 1 2. Elméleti alapismeretek, a méréssel
ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL 1. EGYENÁRAM
 ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL INFORMATIKUS HALLGATÓK RÉSZÉRE 1. EGYENÁRAM 1. Vezesse le a feszültségosztó képletet két ellenállás (R 1 és R 2 ) esetén! Az összefüggésben szerepl mennyiségek jelölését
ALAPFOGALMIKÉRDÉSEK VILLAMOSSÁGTANBÓL INFORMATIKUS HALLGATÓK RÉSZÉRE 1. EGYENÁRAM 1. Vezesse le a feszültségosztó képletet két ellenállás (R 1 és R 2 ) esetén! Az összefüggésben szerepl mennyiségek jelölését
Fizika 1 Elektrodinamika belépő kérdések
 Fizika 1 Elektrodinamika belépő kérdések 1) Maxwell-egyenletek lokális (differenciális) alakja rot H = j+ D rot = B div B=0 div D=ρ H D : mágneses térerősség : elektromos megosztás B : mágneses indukció
Fizika 1 Elektrodinamika belépő kérdések 1) Maxwell-egyenletek lokális (differenciális) alakja rot H = j+ D rot = B div B=0 div D=ρ H D : mágneses térerősség : elektromos megosztás B : mágneses indukció
Ha valahol a mágneses tér változik, akkor ott a tér bizonyos pontjai között elektromos potenciálkülönbség jön létre, ami például egy zárt vezető
 Ha valahol a mágneses tér változik, akkor ott a tér bizonyos pontjai között elektromos potenciálkülönbség jön létre, ami például egy zárt vezető hurokban elektromos áramot hoz létre. Mozgási indukció A
Ha valahol a mágneses tér változik, akkor ott a tér bizonyos pontjai között elektromos potenciálkülönbség jön létre, ami például egy zárt vezető hurokban elektromos áramot hoz létre. Mozgási indukció A
Érzékelők és beavatkozók
 Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
Érzékelők és beavatkozók Léptetőmotorok egyetemi docens - 1 - Léptetőmotorok A léptetőmotorok alapvető tulajdonságai: A forgórész diszkrét szöghelyzetekbe állítható be. Az adott szögpozícióban tartó nyomatékot
Elektrotechnika. Dr. Hodossy László előadás
 . előadás Dr. Hodossy László 006. Hálózatok analízise. Alapfogalmak. Ellenállás 3. Generátorok 4. Hálózatszámí -tási törvények 5. Ellenállások soros és párhuzamos eredője 6. Példák 7. Példák 8. Példák
. előadás Dr. Hodossy László 006. Hálózatok analízise. Alapfogalmak. Ellenállás 3. Generátorok 4. Hálózatszámí -tási törvények 5. Ellenállások soros és párhuzamos eredője 6. Példák 7. Példák 8. Példák
Négypólusok helyettesítő kapcsolásai
 Transzformátorok Magyar találmány: Bláthy Ottó Titusz (1860-1939), Déry Miksa (1854-1938), Zipernovszky Károly (1853-1942), Ganz Villamossági Gyár, 1885. Felépítés, működés Transzformátor: négypólus. Működési
Transzformátorok Magyar találmány: Bláthy Ottó Titusz (1860-1939), Déry Miksa (1854-1938), Zipernovszky Károly (1853-1942), Ganz Villamossági Gyár, 1885. Felépítés, működés Transzformátor: négypólus. Működési
Villamos gépek. Villamos forgógépek. Forgógépek elvi felépítése
 Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
Villamos forgógépek Forgógépek elvi felépítése A villamos forgógépek két fő része: az álló- és a forgórész. Az állórészen elhelyezett tekercsek árama mágneses teret létesít. Ez a mágneses tér a mozgási
Q 1 D Q 2 (D x) 2 (1.1)
 2 (1.1)") . Gyakorlat 4B-9 Két pontszerű töltés az x tengelyen a következőképpen helyezkedik el: egy 3 µc töltés az origóban, és egy + µc töltés az x =, 5 m koordinátájú pontban van. Keressük meg azt a helyet, ahol
. Gyakorlat 4B-9 Két pontszerű töltés az x tengelyen a következőképpen helyezkedik el: egy 3 µc töltés az origóban, és egy + µc töltés az x =, 5 m koordinátájú pontban van. Keressük meg azt a helyet, ahol
FIZIKA. Váltóáramú hálózatok, elektromágneses hullámok
 Váltóáramú hálózatok, elektromágneses Váltóáramú hálózatok Maxwell egyenletek Elektromágneses Váltófeszültség (t) = B A w sinwt = sinwt maximális feszültség w= pf körfrekvencia 4 3 - - -3-4,5,,5,,5,3,35
Váltóáramú hálózatok, elektromágneses Váltóáramú hálózatok Maxwell egyenletek Elektromágneses Váltófeszültség (t) = B A w sinwt = sinwt maximális feszültség w= pf körfrekvencia 4 3 - - -3-4,5,,5,,5,3,35
1. ábra. 24B-19 feladat
 . gyakorlat.. Feladat: (HN 4B-9) A +Q töltés egy hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld.. ábra.). Számítsuk ki az E elektromos térerősséget a vonal. ábra. 4B-9 feladat irányában lévő,
. gyakorlat.. Feladat: (HN 4B-9) A +Q töltés egy hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld.. ábra.). Számítsuk ki az E elektromos térerősséget a vonal. ábra. 4B-9 feladat irányában lévő,
VÁLTAKOZÓ ÁRAMÚ KÖRÖK
 Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
Elektromágnesség tesztek
 Elektromágnesség tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
Elektromágnesség tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
VÁLTAKOZÓ ÁRAM JELLEMZŐI
 VÁLTAKOZÓ ÁA JELLEZŐI Ohmos fogyasztók esetén - a feszültség és az áramerősség fázisban van egymással Körfrekvencia: ω = π f I eff = 0,7 max I eff = 0,7 I max Induktív fogyasztók esetén - az áramerősség
VÁLTAKOZÓ ÁA JELLEZŐI Ohmos fogyasztók esetén - a feszültség és az áramerősség fázisban van egymással Körfrekvencia: ω = π f I eff = 0,7 max I eff = 0,7 I max Induktív fogyasztók esetén - az áramerősség
Mágneses mező tesztek. d) Egy mágnesrúd északi pólusához egy másik mágnesrúd déli pólusát közelítjük.
 Egy mágnesrúd északi pólusához egy másik mágnesrúd déli pólusát közelítjük.") Mágneses mező tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
Mágneses mező tesztek 1. Melyik esetben nem tapasztalunk vonzóerőt? a) A mágnesrúd északi pólusához vasdarabot közelítünk. b) A mágnesrúd közepéhez vasdarabot közelítünk. c) A mágnesrúd déli pólusához
Aszinkron motoros hajtás Matlab szimulációja
 Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Tekercsek. Induktivitás Tekercs: induktivitást megvalósító áramköri elem. Az induktivitás definíciója: Innen:
 Tekercsek Induktivitás Tekercs: induktivitást megvalósító áramköri elem. Az induktivitás definíciója: u i =-N dφ/dt=-n dφ/di di/dt=-l di/dt Innen: L=N dφ/di Ezt integrálva: L=N Φ/I A tekercs induktivitása
Tekercsek Induktivitás Tekercs: induktivitást megvalósító áramköri elem. Az induktivitás definíciója: u i =-N dφ/dt=-n dφ/di di/dt=-l di/dt Innen: L=N dφ/di Ezt integrálva: L=N Φ/I A tekercs induktivitása
A +Q töltés egy L hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld ábra ábra
 . Gyakorlat 4B-9 A +Q töltés egy L hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld. 4-6 ábra.). Számítsuk ki az E elektromos térerősséget a vonal irányában lévő, annak.. ábra. 4-6 ábra végpontjától
. Gyakorlat 4B-9 A +Q töltés egy L hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld. 4-6 ábra.). Számítsuk ki az E elektromos térerősséget a vonal irányában lévő, annak.. ábra. 4-6 ábra végpontjától
Elmozdulás mérés BELEON KRISZTIÁN BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1
 Elmozdulás mérés BELEON KRISZTIÁN 2016.11.17. 2016.11.17. BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1 Mérési eljárás szerint Rezisztív Induktív Kapacitív Optikai Mágneses 2016.11.17. BELEON KRISTIÁN
Elmozdulás mérés BELEON KRISZTIÁN 2016.11.17. 2016.11.17. BELEON KRISTIÁN - MÉRÉSELMÉLET - ELMOZDULÁSMÉRÉS 1 Mérési eljárás szerint Rezisztív Induktív Kapacitív Optikai Mágneses 2016.11.17. BELEON KRISTIÁN
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.
 Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU AUTOMATIZÁLÁSI TANSZÉK HTTP://AUTOMATIZALAS.SZE.HU SZINKRON GÉPEK
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU SZINKRON GÉPEK 2013/2014 - őszi szemeszter Szinkron gép Szinkron gép Szinkron gép motor Szinkron gép állandó mágneses motor Szinkron generátor - energiatermelés
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU SZINKRON GÉPEK 2013/2014 - őszi szemeszter Szinkron gép Szinkron gép Szinkron gép motor Szinkron gép állandó mágneses motor Szinkron generátor - energiatermelés
Pótlap nem használható!
 1. 2. 3. Mondat E1 E2 Össz Gépészmérnöki alapszak Mérnöki fizika 2. ZH NÉV:.. 2018. november 29. Neptun kód:... Pótlap nem használható! g=10 m/s 2 ; εε 0 = 8.85 10 12 F/m; μμ 0 = 4ππ 10 7 Vs/Am; cc = 3
1. 2. 3. Mondat E1 E2 Össz Gépészmérnöki alapszak Mérnöki fizika 2. ZH NÉV:.. 2018. november 29. Neptun kód:... Pótlap nem használható! g=10 m/s 2 ; εε 0 = 8.85 10 12 F/m; μμ 0 = 4ππ 10 7 Vs/Am; cc = 3