Hamilton rendszerek, Lyapunov függvények és Stabilitás. Hamilton rendszerek valós dinamikai rendszerek, konzerva3v mechanikai rendszerek
|
|
|
- Kornélia Rácz
- 10 évvel ezelőtt
- Látták:
Átírás
1 Hamilton rendszerek, Lyapunov függvények és Stabilitás Hamilton rendszerek valós dinamikai rendszerek, konzerva3v mechanikai rendszerek Sokszor nem lehetséges, hogy a tanult linearizációs módszerrel meghatározzuk a kri3kus pontok vagy határciklusok stabilitását. Ilyen esetekben a Lyapunov függvény Használata, és a Lyapunov stabiltás analizís segíthet bennünket. 1. Hamilton rendszerekkel fogunk foglalkozni. 2. A Lyapunov stabilitás analizist tanuljuk meg.

2 A Hamilton rendszerek síkban Egy kétdimenziós differenciálegyenlet rendszer egyszabadság fokú Hamilton Kpusú rendszer, ha a következő alakban írható: dx dt = x = H(x, y) y dy dt = y = H(x, y) x ahol H(x,y) mindkét változó szerint kétszer differenciálható függvény. Ezt nevezzük Hamilton függvénynek Egy ilyen rendszer egy H(x,p) egyszabadsági fokú mechanikai rendszerrel ekvivalens. x = H p p = H x A Hamilton függvény felírható mint: H(x, y) = T(x, y) +V(x, y) mozgási energia helyzek energia
 egyszabadsági fokú mechanikai rendszerrel ekvivalens.")
3 Egy Hamilton rendszer konzerva3v (az össz energia megmarad egy trajektórián a dinamika során ) dh[x(t), y(t)] dt = H(x,y) x dx dt + H(x, y) y dy dt = H x H y H y H x = 0 H[x(t), y(t)] konstans a trajektóriák mentén Példa: fizikai inga L(θ, θ ) = T(θ, θ ) V(θ, θ ) = m 2 Euler- Lagrange egyenletek θ + g l sin(θ) = 0 d dt d dt ( lθ) mgl( 1 cos(θ) ) L(θ, θ ) θ = L(θ, θ ) θ ml 2 θ + mglsin(θ) = 0 θ = φ φ = g l sin( θ) H(θ,φ) = φ 2 2 g l cos θ ( ) θ l g m
 ) L(θ, θ ) θ = L(θ, θ ) θ ml 2 θ + mglsin(θ) = 0 θ = φ φ = g l sin( θ) H(θ,φ) = φ 2 2 g l cos θ ( )")
4 A fizikai inga, mint dinamikus rendszernek a tárgyalása θ = φ φ = g l sin( θ) KriKkus pontok: Jacobi mátrix 0 1 g l cos(θ) 0 (nπ,0) Ha n páros Ha n páratlan 0 1 g 0 l 0 1 g 0 l 2π π λ 1,2 = ±i 0 φ g l π 2π 3π θ nemhperbolikus krikkus pont λ 1,2 = ± g l nyeregpontok Trajektóriák: H( θ,φ) = φ 2 görbék 2 g l cos θ ( ) = C
 = φ 2 görbék 2 g l cos θ")
5 nyeregpontok nemhiperbolikus krikkus pont
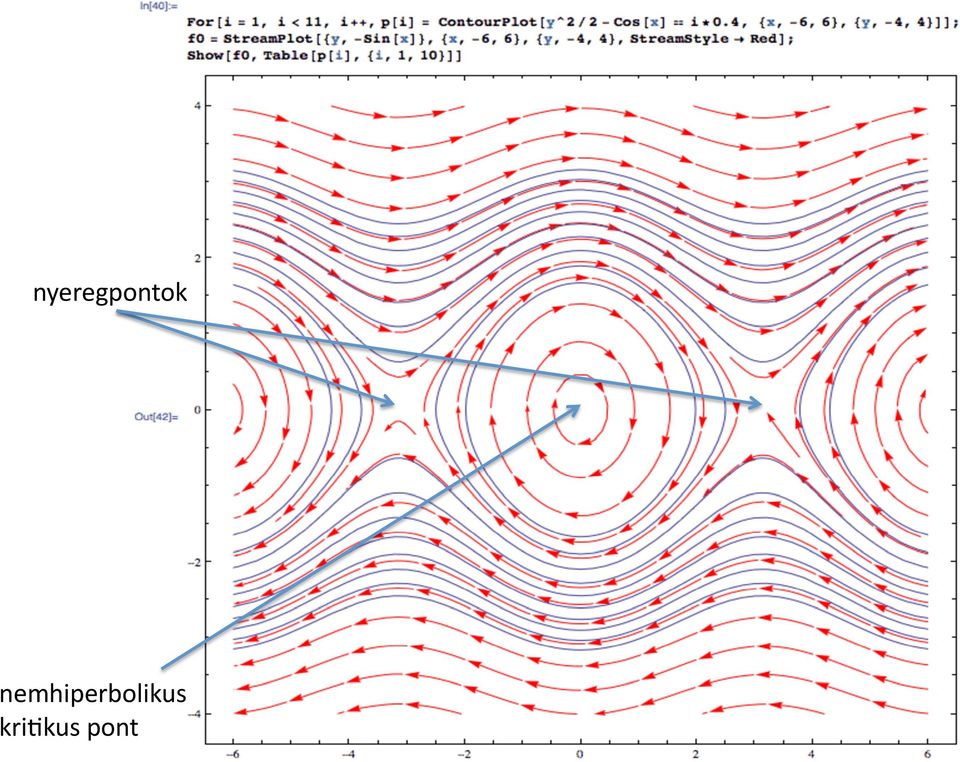
6 H(x, y) = y 2 ( ) 2 cos x nemhiperbolikus krikkus pontok nyeregpontok

7 Ha adoy az x = f ( x ) síkbeli dinamika, amelynek a Jacobi mátrixa J, akkor azt mondjuk, hogy a krikkus pontok nemelfajultak, ha a J- nek nincs 0 sajátértéke. Ha J- nek 0 a sajátértéke, akkor a krikkus pont elfajult. Tétel: Egy 2d Hamilton rendszer minden nemelfajult kridkus pontja vagy nyeregpont vagy center. Bizonyítás: 2 H x z 0,0 J(0,0) = J 0 = Tételezzük fel, hogy a krikkus pont az O(0,0) origó. A Jacobi mátrix: ( ) 2 H ( ) y 2 0,0 2 H ( 0,0) 2 H x 2 y x ( 0,0) Tr(J 0 ) = 0 det( J 0 ) = 2 H ( 0,0) 2 H 0,0 x 2 y 2 ( ) 2 H x y ( 0,0) 2 Ha det(j 0 ) < 0 det(j 0 ) > 0 nyeregpont center
 = J 0 = Tételezzük fel, hogy a krikkus pont az O(0,0) origó.")
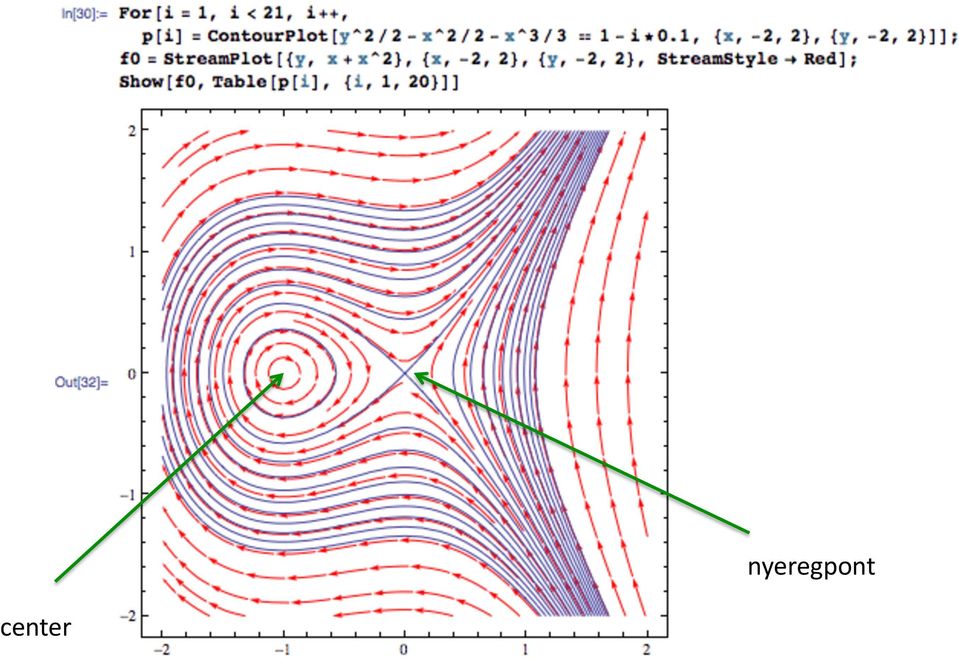
8 Példák: Határozzuk meg a Hamilton függvényét a követlező dinamikai rendszereknek, és rajzoljuk fel a fázis- portréjukat 1. x = y y = x + x 2 H(x, y) = y 2 2 x 2 2 x 3 3 trajektóriák H(x, y) = C KriKkus pontok: O(0,0) P( 1,0) J = x 0 J P = J 0 = λ 1,2 = ±i center nemhiperbolikus λ 1,2 = ±1 nyeregpont v +1 = 1 1 v 1 = 1 1
 P( 1,0) J = 0 1 1+ 2x 0 J P = 0 1 1 0 J 0 = 0 1 1 0 λ 1,2 = ±i center")
9 center nyeregpont
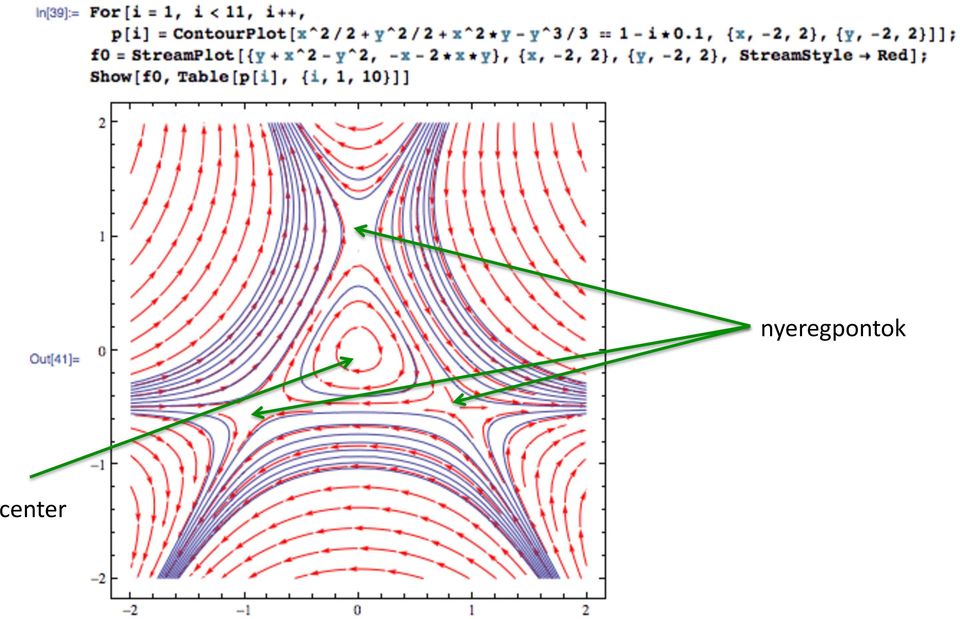
10 2. x = y + x 2 y 2 y = x 2xy H(x, y) = x y x 2 y y 3 3 KriKkus pontok: 2x J = 1 2y 1 2y 2x Trajektóriák: H(x, y) = x 2 O = (0,0) A = (0,1) 2 + y x 2 y y 3 3 B = ( 2, 1 2 ) C = ( 3 2, 1 2 ) 3 = C J 0 = J A = J B = 0 3 J C = λ 1,2 = ±i λ 1,2 = ± 3 v 3 = 1 1 λ 1,2 = ± 3 v 3 = 1 0 λ 1,2 = ± 3 v 3 = 1 3 center nyeregpont v 3 = 1 1 nyeregpont 1 v 3 = 3 nyeregpont v 3 = 1 0

11 center nyeregpontok
12 Tekintsünk egy 2d dinamikus rendszert. Legyen x 0 egy krikkus pont. Ha Λ + (γ) = Λ (γ) = x 0, akkor γ egy homoklinikus orbitál. - egy homoklinikus orbitál egy krikkus pontot önmagával kök össze - Végtelen idejű dinamika kell, hogy az összekötés megvalósuljon homoklinikus orbitál

13 Tekintsünk egy 2d dinamikus rendszert. x 0 y 0 Λ (γ) = y 0 Legyen és két krkkus pont. Ha Λ + (γ) = x 0 és, akkor egy heteroklinikus orbitál. γ Heteroklinikus orbitálok

14 szeparatrix Egy olyan orbitál ami fázissíkot két dinamikailag kalitakven különböző doméniumra ossza A homoklinikus és heteroklinikus orbitálok példák szeparatrix- re

15 Potenciálmódszer a kridkus pontok stabilitásának a viszgálatára x = U x y = U y U(x, y) du dt = U x dx dt + U y potenciálfüggvény dy dt = U x 2 + U 2 y 0 Egy trajektória mentén a potenciálfüggvény csökken. krikkus pontok: x = 0 y = 0 U x = 0 U y = 0 lokális maximumok vagy minimumai a potenciálfüggvénynek lokális maximum lokális minimum instabil krikkus pont stabil krikkus pont

16 Példa x = x x 3 y = y O(0,0) KriKkus pontok: A( 1,0) B(1,0) J = 1 3x J O = λ 1,2 = ±1 nyeregpont J A = λ 1 = 2 λ 2 = 1 stabil nodus V (x, y) = x x y 2 2 J B = λ 1 = 2 λ 2 = 1 stabil nodus dupla potenciálvölgy

17 KriDkus pontok stabilitása x = f ( x ) Ha x (t) egy trajektória a fenk dinamikában Egy x 0 krikkus pont stabil, ha minden ε > 0 - hoz létezik δ > 0 úgy, hogy ha, x (t) x 0 (t) < ε mikor x (t 0 ) x 0 (t 0 ) < δ. t t 0 Egy x 0 krikkus pont asszimptodkusan stabil, ha stabil és létezik η > 0 úgy, hogy lim t x (t) x 0 (t) = 0 ha x (t 0 ) x 0 (t 0 ) < η Egy stabil krikkus pont környezetében a trajektóriák a krikkus pont közelében maradnak Egy asszimptokkusan stabil krikkus pont környezetében a trajetóriák bekonvergálnak a KriKkus pontban

18 Lyapunov függvény és stabilitás vizsgálat Nemhiperbolikus krikkus pontok esetén a Lyapunov stabilitás vizsgálat használható, hogy a krikkus pontok stabilitását vizsgáljuk Lyapunov stabilitás tétele Legyen x = f ( x ) egy dinamika és f folytonosan deriválható. Legyen x 0 egy krikkus pont és E R 2 egy nyílt halmaz amely tartalmazza az x 0 pontot. Tételezzük fel, hogy létezik egy V ( x ) folytonosan deriválható függvény amelyre V ( x 0 ) = 0 V ( x ) > 0ha x x 0 V ( x ) Lyapunov függvény Ilyen esetben, ha d dt V ( x (t)) 0, x 1. E akkor x 0 stabil d dt V ( x (t)) < 0, x 2. E akkor x 0 asszimptokkusan stabil d ( x (t)) > 0, x 3. E akkor instabil x 0 dt V d 4. dt V ( x (t)) ( ) = 0 x E a trajektoriák a ( x ( t) ) = C görbék V
) < 0, x 2. E akkor x 0 asszimptokkusan stabil d ( x (t)) > 0, x 3. E akkor instabil x 0 dt V d 4.")
19 Példák: x = y 3 KriKkus pont: O(0,0) minden sajátérték 0 1. y = x 3 nemhiperbolikus krikkus pont a klasszikus stabilitásvizsgálat nem müködik V (x, y) = x 4 + y 4 dv dt = V x dx dt + V y megfelelő Lyapunov függvény dy dt = 4 x 3 y 3 ( ) + 4y 3 x 3 ( ) = 0 A trajektóriák: x 4 + y 4 = C Az O stabil, de nem asszimptokkusan stabil y > 0 x < 0 y < 0 x > 0
 + 4y 3 x 3 ( ) = 0 A trajektóriák: x 4 + y 4 = C Az O stabil, de nem asszimptokkusan")
20 2. x = y y = x y(1 x 2 ) KriKkus pont: O(0,0) J O = λ 1,2 = 1 2 ± i 3 2 stabil fókusz Lyapunov függvény: V (x, y) = x 2 + y 2 dv dt Ha x <1 = V x dx dt + V y dv dt 0 dy dt = 2y 2 (x 2 1) dv dt = 0 y = 0 x = 0 y = x az y=0 egyenesről a trajektóriák távolodnak Az O pont asszimptokkusan stabil

21 3. x = 8x xy 2 3y 3 y = 2x 2 y + 2xy 2 Bizonyítsuk be, hogy O(0,0) asszimptokkusan stabil krikkus pont J O = λ 1 = 8 λ 2 = 0 Az O krikkus pont nemhiperbolikus V (x, y) = 2x 2 + 3y 2 Legyen: V = 4x( 8x xy 2 3y 3 ) + 6y(2x 2 y + 2xy 2 ) = 8x 2 (y 2 4) V 0 ha y < 2 A trajektóriák mentén végig csökken V ha V(x,y)<12 és V = 0 V < 0 ha ha y < 2 x = 0 x = 3y 3 y = 0 y x a trajektoriák távolodnak az x=0 tengelytől A Lyapunov stabilitás doménium 2x 2 + 3y 2 <12 egy ellipszis belsejében van
22
valós számot tartalmaz, mert az ilyen részhalmazon nem azonosság.
 2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
2 (j) f(x) dx = 1 arcsin(3x 2) + C. (d) A x + Bx + C 5x (2x 2 + 7) + Hx + I. 2 2x F x + G. x
 f(x) dx = 1 arcsin(3x 2) + C. (d) A x + Bx + C 5x (2x 2 + 7) + Hx + I. 2 2x F x + G. x") I feladatsor Határozza meg az alábbi függvények határozatlan integrálját: a fx dx = x arctg + C b fx dx = arctgx + C c fx dx = 5/x 4 arctg 5 x + C d fx dx = arctg + C 5/ e fx dx = x + arctg + C f fx dx
I feladatsor Határozza meg az alábbi függvények határozatlan integrálját: a fx dx = x arctg + C b fx dx = arctgx + C c fx dx = 5/x 4 arctg 5 x + C d fx dx = arctg + C 5/ e fx dx = x + arctg + C f fx dx
MATE-INFO UBB verseny, március 25. MATEMATIKA írásbeli vizsga
 BABEŞ-BOLYAI TUDOMÁNYEGYETEM, KOLOZSVÁR MATEMATIKA ÉS INFORMATIKA KAR MATE-INFO UBB verseny, 218. március 25. MATEMATIKA írásbeli vizsga FONTOS TUDNIVALÓK: 1 A feleletválasztós feladatok,,a rész esetén
BABEŞ-BOLYAI TUDOMÁNYEGYETEM, KOLOZSVÁR MATEMATIKA ÉS INFORMATIKA KAR MATE-INFO UBB verseny, 218. március 25. MATEMATIKA írásbeli vizsga FONTOS TUDNIVALÓK: 1 A feleletválasztós feladatok,,a rész esetén
1.7. Elsőrendű lineáris differenciálegyenlet-rendszerek
 7 Elsőrendű lineáris differenciálegyenlet-rendszerek Legyen n N, I R intervallum és A: I M n n (R), B: I R n folytonos függvények, és tekintsük az { y (x) = A(x)y(x) + B(x) y(ξ) = η kezdeti érték problémát,
7 Elsőrendű lineáris differenciálegyenlet-rendszerek Legyen n N, I R intervallum és A: I M n n (R), B: I R n folytonos függvények, és tekintsük az { y (x) = A(x)y(x) + B(x) y(ξ) = η kezdeti érték problémát,
Analízis III. gyakorlat október
 Vektoranalízis Analízis III. gyakorlat 216. október Gyakorló feladatok és korábbi zh feladatok V1. Igazolja az alábbi "szorzat deriválási" szabályt: div(ff) = F, f + f div(f). V2. Legyen f : IR 3 IR kétszer
Vektoranalízis Analízis III. gyakorlat 216. október Gyakorló feladatok és korábbi zh feladatok V1. Igazolja az alábbi "szorzat deriválási" szabályt: div(ff) = F, f + f div(f). V2. Legyen f : IR 3 IR kétszer
Lássuk be, hogy nem lehet a három pontot úgy elhelyezni, hogy egy inerciarendszerben
 Feladat: A háromtest probléma speciális megoldásai Arra vagyunk kiváncsiak, hogy a bolygó mozgásnak milyen egyszerű egyensúlyi megoldásai vannak három bolygó esetén. Az így felmerülő három-test probléma
Feladat: A háromtest probléma speciális megoldásai Arra vagyunk kiváncsiak, hogy a bolygó mozgásnak milyen egyszerű egyensúlyi megoldásai vannak három bolygó esetén. Az így felmerülő három-test probléma
8. DINAMIKAI RENDSZEREK
 8. DINAMIKAI RENDSZEREK A gyakorlat célja az, hogy egy kétváltozós reakciókinetikai rendszer vizsgálatával a hallgatók megismerjék a dinamikai rendszerek alapfogalmait, elsajátítsák a lineáris stabilitásvizsgálat
8. DINAMIKAI RENDSZEREK A gyakorlat célja az, hogy egy kétváltozós reakciókinetikai rendszer vizsgálatával a hallgatók megismerjék a dinamikai rendszerek alapfogalmait, elsajátítsák a lineáris stabilitásvizsgálat
Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait.
 Közönséges differenciálegyenletek Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait. Célunk a függvény meghatározása Egyetlen független
Közönséges differenciálegyenletek Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait. Célunk a függvény meghatározása Egyetlen független
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 A derivált alkalmazásai H607, EIC 2019-04-03 Wettl
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 A derivált alkalmazásai H607, EIC 2019-04-03 Wettl
Matematika III előadás
 Matematika III. - 3. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 19 Skalármezők
Matematika III. - 3. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 19 Skalármezők
r a sugara, h a magassága a hengernek a maximalizálandó függvényünk a V (r, h) = πr 2 h. Az érintkezési pontokban x 2 + y 2 = r 2 és z = h/2.
 = πr 2 h. Az érintkezési pontokban x 2 + y 2 = r 2 és z = h/2.") Feltételes szélsőérték Keressük úgy egy kétváltozós f (x, y) függvény szélsőértékét, hogy közben eleget tegyünk egy másik, g(x, y) = 0 típusú megszorításnak. Példa Határozzuk meg egy forgásellipszoidba
Feltételes szélsőérték Keressük úgy egy kétváltozós f (x, y) függvény szélsőértékét, hogy közben eleget tegyünk egy másik, g(x, y) = 0 típusú megszorításnak. Példa Határozzuk meg egy forgásellipszoidba
Kalkulus 2., Matematika BSc 1. Házi feladat
 . Házi feladat Beadási határidő: 07.0.. Jelölések x = (x,..., x n, y = (y,..., y n, z = (z,..., z n R n esetén. x, y = n i= x iy i, skalárszorzat R n -ben. d(x, y = x y = n i= (x i y i, metrika R n -ben
. Házi feladat Beadási határidő: 07.0.. Jelölések x = (x,..., x n, y = (y,..., y n, z = (z,..., z n R n esetén. x, y = n i= x iy i, skalárszorzat R n -ben. d(x, y = x y = n i= (x i y i, metrika R n -ben
Matematika I. NÉV:... FELADATOK:
 24.2.9. Matematika I. NÉV:... FELADATOK:. A tanult módon vizsgáljuk az a = 3, a n = 3a n 2 (n > ) rekurzív sorozatot. pt 2n 2 + e 2. Definíció szerint és formálisan is igazoljuk, hogy lim =. pt n 3 + n
24.2.9. Matematika I. NÉV:... FELADATOK:. A tanult módon vizsgáljuk az a = 3, a n = 3a n 2 (n > ) rekurzív sorozatot. pt 2n 2 + e 2. Definíció szerint és formálisan is igazoljuk, hogy lim =. pt n 3 + n
92 MAM143A előadásjegyzet, 2008/2009. x = f(t,x). x = f(x), (6.1)
. x = f(x), (6.1)") 9 MAM43A előadásjegyzet, 8/9 6. Stabilitáselmélet 6.. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x.
9 MAM43A előadásjegyzet, 8/9 6. Stabilitáselmélet 6.. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x.
MATEMATIKA 2. dolgozat megoldása (A csoport)
") MATEMATIKA. dolgozat megoldása (A csoport). Definiálja az alábbi fogalmakat: (egyváltozós) függvény folytonossága, differenciálhatósága, (többváltozós függvény) iránymenti deriváltja. (3x8 pont). Az f
MATEMATIKA. dolgozat megoldása (A csoport). Definiálja az alábbi fogalmakat: (egyváltozós) függvény folytonossága, differenciálhatósága, (többváltozós függvény) iránymenti deriváltja. (3x8 pont). Az f
Matematika I. NÉV:... FELADATOK: 2. Határozzuk meg az f(x) = 2x 3 + 2x 2 2x + 1 függvény szélsőértékeit a [ 2, 2] halmazon.
![Matematika I. NÉV:... FELADATOK: 2. Határozzuk meg az f(x) = 2x 3 + 2x 2 2x + 1 függvény szélsőértékeit a [ 2, 2] halmazon.](/thumbs/102/154127337.jpg "Matematika I. NÉV:... FELADATOK: 2. Határozzuk meg az f(x) = 2x 3 + 2x 2 2x + 1 függvény szélsőértékeit a [ 2, 2] halmazon.") 215.12.8. Matematika I. NÉV:... 1. Lineáris transzformációk segítségével ábrázoljuk az f(x) = ln(2 3x) függvényt. 7pt 2. Határozzuk meg az f(x) = 2x 3 + 2x 2 2x + 1 függvény szélsőértékeit a [ 2, 2] halmazon.
215.12.8. Matematika I. NÉV:... 1. Lineáris transzformációk segítségével ábrázoljuk az f(x) = ln(2 3x) függvényt. 7pt 2. Határozzuk meg az f(x) = 2x 3 + 2x 2 2x + 1 függvény szélsőértékeit a [ 2, 2] halmazon.
8. DINAMIKAI RENDSZEREK
 8. DINAMIKAI RENDSZEREK Különböző folyamatok leírására különböző tudományterületeken állítanak fel olyan modelleket, amelyek nemlineáris közönséges autonóm differenciálegyenlet-rendszerre vezetnek. Ezek
8. DINAMIKAI RENDSZEREK Különböző folyamatok leírására különböző tudományterületeken állítanak fel olyan modelleket, amelyek nemlineáris közönséges autonóm differenciálegyenlet-rendszerre vezetnek. Ezek
2. SZÉLSŽÉRTÉKSZÁMÍTÁS. 2.1 A széls érték fogalma, létezése
 2 SZÉLSŽÉRTÉKSZÁMÍTÁS DEFINÍCIÓ 21 A széls érték fogalma, létezése Azt mondjuk, hogy az f : D R k R függvénynek lokális (helyi) maximuma (minimuma) van az x 0 D pontban, ha van olyan ε > 0 hogy f(x 0 )
2 SZÉLSŽÉRTÉKSZÁMÍTÁS DEFINÍCIÓ 21 A széls érték fogalma, létezése Azt mondjuk, hogy az f : D R k R függvénynek lokális (helyi) maximuma (minimuma) van az x 0 D pontban, ha van olyan ε > 0 hogy f(x 0 )
sin x = cos x =? sin x = dx =? dx = cos x =? g) Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!
 Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!") Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
5.1. Autonóm nemlineáris rendszerek
 5. Stabilitáselmélet 87 5. Stabilitáselmélet 5.1. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x).
5. Stabilitáselmélet 87 5. Stabilitáselmélet 5.1. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x).
VIK A1 Matematika BOSCH, Hatvan, 5. Gyakorlati anyag
 VIK A1 Matematika BOSCH, Hatvan, 5. Gyakorlati anyag 2018/19 1. félév Függvények határértéke 1. Bizonyítsuk be definíció alapján a következőket! (a) lim x 2 3x+1 5x+4 = 1 2 (b) lim x 4 x 16 x 2 4x = 2
VIK A1 Matematika BOSCH, Hatvan, 5. Gyakorlati anyag 2018/19 1. félév Függvények határértéke 1. Bizonyítsuk be definíció alapján a következőket! (a) lim x 2 3x+1 5x+4 = 1 2 (b) lim x 4 x 16 x 2 4x = 2
Kétváltozós függvények differenciálszámítása
 Kétváltozós függvények differenciálszámítása 13. előadás Farkas István DE ATC Gazdaságelemzési és Statisztikai Tanszék Kétváltozós függvények p. 1/1 Definíció, szemléltetés Definíció. Az f : R R R függvényt
Kétváltozós függvények differenciálszámítása 13. előadás Farkas István DE ATC Gazdaságelemzési és Statisztikai Tanszék Kétváltozós függvények p. 1/1 Definíció, szemléltetés Definíció. Az f : R R R függvényt
MODELLEK ÉS ALGORITMUSOK ELŐADÁS
 MODELLEK ÉS ALGORITMUSOK ELŐADÁS Szerkesztette: Balogh Tamás 214. december 7. Ha hibát találsz, kérlek jelezd a info@baloghtamas.hu e-mail címen! Ez a Mű a Creative Commons Nevezd meg! - Ne add el! - Így
MODELLEK ÉS ALGORITMUSOK ELŐADÁS Szerkesztette: Balogh Tamás 214. december 7. Ha hibát találsz, kérlek jelezd a info@baloghtamas.hu e-mail címen! Ez a Mű a Creative Commons Nevezd meg! - Ne add el! - Így
Óravázlatok: Matematika 2.
 Óravázlatok: Matematika 2. Bartha Ferenc készültség: March 4, 2003 1. VEKTOR-SKALÁR FÜGGVÉNYEK DIFFERENCIÁLÁSA Legyen a továbbiakban M R n nyílt halmaz és f : M R valós függvény, x (x 1,.., x n ) M Ha
Óravázlatok: Matematika 2. Bartha Ferenc készültség: March 4, 2003 1. VEKTOR-SKALÁR FÜGGVÉNYEK DIFFERENCIÁLÁSA Legyen a továbbiakban M R n nyílt halmaz és f : M R valós függvény, x (x 1,.., x n ) M Ha
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
3. előadás Stabilitás
 Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
FELVÉTELI VIZSGA, július 21. Írásbeli próba MATEMATIKÁBÓL A. RÉSZ
 BABE -BOLYAI TUDOMÁNYEGYETEM, KOLOZSVÁR MATEMATIKA ÉS INFORMATIKA KAR FELVÉTELI VIZSGA, 9. július. Írásbeli próba MATEMATIKÁBÓL FONTOS MEGJEGYZÉS: ) Az A. részben megjelen feleletválasztós feladatok esetén
BABE -BOLYAI TUDOMÁNYEGYETEM, KOLOZSVÁR MATEMATIKA ÉS INFORMATIKA KAR FELVÉTELI VIZSGA, 9. július. Írásbeli próba MATEMATIKÁBÓL FONTOS MEGJEGYZÉS: ) Az A. részben megjelen feleletválasztós feladatok esetén
Matematika II. 1 sin xdx =, 1 cos xdx =, 1 + x 2 dx =
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Losonczi László. Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar
 Szélsőértékszámítás Losonczi László Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar Losonczi László (DE) Szélsőértékszámítás 1 / 21 2. SZÉLSOÉRTÉKSZÁMÍTÁS 2.1 A szélsőérték fogalma, létezése Azt
Szélsőértékszámítás Losonczi László Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar Losonczi László (DE) Szélsőértékszámítás 1 / 21 2. SZÉLSOÉRTÉKSZÁMÍTÁS 2.1 A szélsőérték fogalma, létezése Azt
First Prev Next Last Go Back Full Screen Close Quit
 Többváltozós függvények (2) First Prev Next Last Go Back Full Screen Close Quit 1. Egyváltozós függvények esetén a differenciálhatóságból következett a folytonosság. Fontos tudni, hogy abból, hogy egy
Többváltozós függvények (2) First Prev Next Last Go Back Full Screen Close Quit 1. Egyváltozós függvények esetén a differenciálhatóságból következett a folytonosság. Fontos tudni, hogy abból, hogy egy
Többváltozós függvények Feladatok
 Többváltozós függvények Feladatok 2. szeptember 3. Határozzuk meg az alábbi sorozatok határértékét illetve torlódási pontjait!. ( n n2 + n n 3 2. ( n + n n5 n2 +2n+ 5 n n+ 3. ( sin(nπ/2 n n! Határozzuk
Többváltozós függvények Feladatok 2. szeptember 3. Határozzuk meg az alábbi sorozatok határértékét illetve torlódási pontjait!. ( n n2 + n n 3 2. ( n + n n5 n2 +2n+ 5 n n+ 3. ( sin(nπ/2 n n! Határozzuk
Utolsó el adás. Wettl Ferenc BME Algebra Tanszék, Wettl Ferenc (BME) Utolsó el adás / 20
 Utolsó el adás / 20") Utolsó el adás Wettl Ferenc BME Algebra Tanszék, http://www.math.bme.hu/~wettl 2013-12-09 Wettl Ferenc (BME) Utolsó el adás 2013-12-09 1 / 20 1 Dierenciálegyenletek megoldhatóságának elmélete 2 Parciális
Utolsó el adás Wettl Ferenc BME Algebra Tanszék, http://www.math.bme.hu/~wettl 2013-12-09 Wettl Ferenc (BME) Utolsó el adás 2013-12-09 1 / 20 1 Dierenciálegyenletek megoldhatóságának elmélete 2 Parciális
Elhangzott tananyag óránkénti bontásban
 TTK, Matematikus alapszak Differenciálegyenletek (Előadás BMETE93AM03; Gyakorlat BME TE93AM04) Elhangzott tananyag óránkénti bontásban 2016. február 15. 1. előadás. Közönséges differenciálegyenlet fogalma.
TTK, Matematikus alapszak Differenciálegyenletek (Előadás BMETE93AM03; Gyakorlat BME TE93AM04) Elhangzott tananyag óránkénti bontásban 2016. február 15. 1. előadás. Közönséges differenciálegyenlet fogalma.
Lagrange egyenletek. Úgy a virtuális munka mint a D Alembert-elv gyakorlati alkalmazását
 Lagrange egyenletek Úgy a virtuális munka mint a D Alembert-elv gyakorlati alkalmazását megnehezíti a δr i virtuális elmozdulások egymástól való függősége. (F i ṗ i )δx i = 0, i = 1, 3N. (1) i 3N infinitezimális
Lagrange egyenletek Úgy a virtuális munka mint a D Alembert-elv gyakorlati alkalmazását megnehezíti a δr i virtuális elmozdulások egymástól való függősége. (F i ṗ i )δx i = 0, i = 1, 3N. (1) i 3N infinitezimális
L-transzformáltja: G(s) = L{g(t)}.
 = L{g(t)}.") Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Differenciálegyenletek
 DE 1 Ebben a részben I legyen mindig pozitív hosszúságú intervallum DE Definíció: differenciálegyenlet Ha D n+1 nyílt halmaz, f:d folytonos függvény, akkor az y (n) (x) f ( x, y(x), y'(x),..., y (n-1)
DE 1 Ebben a részben I legyen mindig pozitív hosszúságú intervallum DE Definíció: differenciálegyenlet Ha D n+1 nyílt halmaz, f:d folytonos függvény, akkor az y (n) (x) f ( x, y(x), y'(x),..., y (n-1)
A brachistochron probléma megoldása
 A brachistochron probléma megoldása Adott a függőleges síkban két nem egy függőleges egyenesen fekvő P 0 és P 1 pont, amelyek közül a P 1 fekszik alacsonyabban. Azt a kérdést fogjuk vizsgálni. hogy van-e
A brachistochron probléma megoldása Adott a függőleges síkban két nem egy függőleges egyenesen fekvő P 0 és P 1 pont, amelyek közül a P 1 fekszik alacsonyabban. Azt a kérdést fogjuk vizsgálni. hogy van-e
7. DINAMIKAI RENDSZEREK
 7. DINAMIKAI RENDSZEREK Különböző folyamatok leírására különböző tudományterületeken állítanak fel olyan modelleket, amelyek nemlineáris közönséges autonóm differenciálegyenlet-rendszerre vezetnek. Ezek
7. DINAMIKAI RENDSZEREK Különböző folyamatok leírására különböző tudományterületeken állítanak fel olyan modelleket, amelyek nemlineáris közönséges autonóm differenciálegyenlet-rendszerre vezetnek. Ezek
Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához
 Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához Dr. Nagy Gábor, Geometria Tanszék 2010. szeptember 16. Görbék paraméterezése 1. feladat. (A) Bizonyítsuk be a vektoriális szorzatra vonatkozó
Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához Dr. Nagy Gábor, Geometria Tanszék 2010. szeptember 16. Görbék paraméterezése 1. feladat. (A) Bizonyítsuk be a vektoriális szorzatra vonatkozó
Nemlineáris programozás 2.
 Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
Feladatok Differenciálegyenletek II. témakörhöz. 1. Határozzuk meg a következő elsőrendű lineáris differenciálegyenletek általános megoldását!
 Feladatok Differenciálegyenletek II. témakörhöz 1. Határozzuk meg a következő elsőrendű lineáris differenciálegyenletek általános megoldását! (a) (b) 2. Tekintsük az differenciálegyenletet. y y = e x.
Feladatok Differenciálegyenletek II. témakörhöz 1. Határozzuk meg a következő elsőrendű lineáris differenciálegyenletek általános megoldását! (a) (b) 2. Tekintsük az differenciálegyenletet. y y = e x.
Lagrange és Hamilton mechanika
 Lagrange és 2010. október 17. Lagrange és Tartalom 1 Variáció Lagrange egyenlet Legendre transzformáció Hamilton egyenletek 2 3 Szimplektikus sokaság Hamilton mez Hamilton és Lagrange egyenletek ekvivalenciája
Lagrange és 2010. október 17. Lagrange és Tartalom 1 Variáció Lagrange egyenlet Legendre transzformáció Hamilton egyenletek 2 3 Szimplektikus sokaság Hamilton mez Hamilton és Lagrange egyenletek ekvivalenciája
Fázisportrék. A Dinamikai rendszerek órákon bemutatott példarendszerek fázisportréi. Lineáris oszcillátor. v = ax bv
 Fázisportrék A Dinamikai rendszerek órákon bemutatott példarendszerek fázisportréi Lineáris oszcillátor ẋ=v v = ax bv a=0, b=0: centrum, konzervatív rendszer a=0, b=0,5: stabil fókusz, disszipatív rendszer
Fázisportrék A Dinamikai rendszerek órákon bemutatott példarendszerek fázisportréi Lineáris oszcillátor ẋ=v v = ax bv a=0, b=0: centrum, konzervatív rendszer a=0, b=0,5: stabil fókusz, disszipatív rendszer
Alapfogalmak, valós számok Sorozatok, határérték Függvények határértéke, folytonosság A differenciálszámítás Függvénydiszkusszió Otthoni munka
 Pintér Miklós miklos.pinter@uni-corvinus.hu Ősz Alapfogalmak Halmazok Definíció Legyen A egy tetszőleges halmaz, ekkor x A (x / A) jelentése: x (nem) eleme A-nak. A B (A B) jelentése: A (valódi) részhalmaza
Pintér Miklós miklos.pinter@uni-corvinus.hu Ősz Alapfogalmak Halmazok Definíció Legyen A egy tetszőleges halmaz, ekkor x A (x / A) jelentése: x (nem) eleme A-nak. A B (A B) jelentése: A (valódi) részhalmaza
Dierenciálhányados, derivált
 9. fejezet Dierenciálhányados, derivált A dierenciálhányados deníciója D 9.1 Az egyváltozós valós f függvény x0 pontbeli dierenciálhányadosának nevezzük a lim f(x0 + h) f(x0) h 0 h határértéket, ha ez
9. fejezet Dierenciálhányados, derivált A dierenciálhányados deníciója D 9.1 Az egyváltozós valós f függvény x0 pontbeli dierenciálhányadosának nevezzük a lim f(x0 + h) f(x0) h 0 h határértéket, ha ez
Bevezetés az algebrába 2
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Differencia- és differenciálegy.-rsz. H607 2017-04-05
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Differencia- és differenciálegy.-rsz. H607 2017-04-05
Feladatok a Gazdasági matematika II. tárgy gyakorlataihoz
 Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
1. Számsorok, hatványsorok, Taylor-sor, Fourier-sor
 . Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következő végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle belső konvergenciakritérium) A a n végtelen sor akkor és csakis
. Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következő végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle belső konvergenciakritérium) A a n végtelen sor akkor és csakis
Valószínűségi változók. Várható érték és szórás
 Matematikai statisztika gyakorlat Valószínűségi változók. Várható érték és szórás Valószínűségi változók 2016. március 7-11. 1 / 13 Valószínűségi változók Legyen a (Ω, A, P) valószínűségi mező. Egy X :
Matematikai statisztika gyakorlat Valószínűségi változók. Várható érték és szórás Valószínűségi változók 2016. március 7-11. 1 / 13 Valószínűségi változók Legyen a (Ω, A, P) valószínűségi mező. Egy X :
Lotka Volterra-féle populációdinamikai modellek vizsgálata
 Eötvös Loránd Tudományegyetem Természettudományi Kar Alkalmazott Analízis és Számításmatematikai Tanszék Lotka Volterra-féle populációdinamikai modellek vizsgálata Szakdolgozat Készítette: Kiss Franciska
Eötvös Loránd Tudományegyetem Természettudományi Kar Alkalmazott Analízis és Számításmatematikai Tanszék Lotka Volterra-féle populációdinamikai modellek vizsgálata Szakdolgozat Készítette: Kiss Franciska
Kétváltozós függvény szélsőértéke
 Kétváltozós függvény szélsőértéke Sütő Andrea Kétváltozós függvény szélsőértéke Legyen adott f ( xy, ) kétváltozós függvény és ez legyen folytonosan totálisan differenciálható, azaz létezzenek az elsőrendű
Kétváltozós függvény szélsőértéke Sütő Andrea Kétváltozós függvény szélsőértéke Legyen adott f ( xy, ) kétváltozós függvény és ez legyen folytonosan totálisan differenciálható, azaz létezzenek az elsőrendű
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Differenciálhatóság H607, EIC 2019-03-14 Wettl
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Differenciálhatóság H607, EIC 2019-03-14 Wettl
1. Bevezetés. 2. Felületek megadása térben. A fenti kúp egy z tengellyel rendelkező. ismerhető fel, hogy. 1. definíció. Legyen D R n.
 1. Többváltozós függvények 1. Bevezetés Ennek a fejezetnek a célja a kétváltozós függvények vizsgálata, ami során a 3-dimenziós felületeket szeretnénénk megérteni. 1. definíció. Legyen D R n. Ekkor az
1. Többváltozós függvények 1. Bevezetés Ennek a fejezetnek a célja a kétváltozós függvények vizsgálata, ami során a 3-dimenziós felületeket szeretnénénk megérteni. 1. definíció. Legyen D R n. Ekkor az
3. Fékezett ingamozgás
 3. Fékezett ingamozgás A valóságban mindig jelen van valamilyen csillapítás. A gázban vagy folyadékban való mozgásnál, kis sebesség esetén a csillapítás arányos a sebességgel. Ha az vagy az ''+k sin =0,
3. Fékezett ingamozgás A valóságban mindig jelen van valamilyen csillapítás. A gázban vagy folyadékban való mozgásnál, kis sebesség esetén a csillapítás arányos a sebességgel. Ha az vagy az ''+k sin =0,
MATEMATIKAI PROBLÉMAMEGOLDÓ GYAKORLAT
 MATEMATIKAI PROBLÉMAMEGOLDÓ GYAKORLAT Ergodelmélet Dávid Szabolcs Papp Dániel Stippinger Marcell 2009.12.11 2 Definíció: A T endomorfizmust ergodikusnak nevezzük, ha bármely f L 2 függvényre f const. (Miután
MATEMATIKAI PROBLÉMAMEGOLDÓ GYAKORLAT Ergodelmélet Dávid Szabolcs Papp Dániel Stippinger Marcell 2009.12.11 2 Definíció: A T endomorfizmust ergodikusnak nevezzük, ha bármely f L 2 függvényre f const. (Miután
Matematika szigorlat, Mérnök informatikus szak I máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.
 Matematika szigorlat, Mérnök informatikus szak I. 2009. máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.: 180 perc 0-49 pont: elégtelen, 50-61 pont: elégséges, 62-73 pont:
Matematika szigorlat, Mérnök informatikus szak I. 2009. máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.: 180 perc 0-49 pont: elégtelen, 50-61 pont: elégséges, 62-73 pont:
Gépi tanulás a gyakorlatban. Lineáris regresszió
 Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Euleri és Lagrange szemlélet, avagy a meteorológia deriváltjai
 Euleri és Lagrange szemlélet, avagy a meteorológia deriváltjai Mona Tamás Időjárás előrejelzés speci 3. előadás 2014 Differenciál, differencia Mi a különbség f x és df dx között??? Differenciál, differencia
Euleri és Lagrange szemlélet, avagy a meteorológia deriváltjai Mona Tamás Időjárás előrejelzés speci 3. előadás 2014 Differenciál, differencia Mi a különbség f x és df dx között??? Differenciál, differencia
Felügyelt önálló tanulás - Analízis III.
 Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
2. sillabusz a Többváltozós függvények kurzushoz
 Az implicitfüggvény-tétel 2. sillabusz a Többváltozós függvények kurzushoz Mi az hogy sillabusz? Ez egy olyan iromány ami segédanyagnak készült. Vázlatos pontatlan (szándékoltan) hiányos. Segíti a tanulást
Az implicitfüggvény-tétel 2. sillabusz a Többváltozós függvények kurzushoz Mi az hogy sillabusz? Ez egy olyan iromány ami segédanyagnak készült. Vázlatos pontatlan (szándékoltan) hiányos. Segíti a tanulást
Megoldások MATEMATIKA II. VIZSGA (VK) NBT. NG. NMH. SZAKOS HALLGATÓK RÉSZÉRE (Kérjük, hogy a megfelelő szakot jelölje be!
 NBT. NG. NMH. SZAKOS HALLGATÓK RÉSZÉRE (Kérjük, hogy a megfelelő szakot jelölje be!") MATEMATIKA II. VIZSGA (VK) NBT. NG. NMH. SZAKOS HALLGATÓK RÉSZÉRE (Kérjük, hogy a megfelelő szakot jelölje be!) 2016. JANUÁR 21. Elérhető pontszám: 50 pont Megoldások 1. 6. 2. 7. 3. 8. 4. 9. 5. Össz.:
MATEMATIKA II. VIZSGA (VK) NBT. NG. NMH. SZAKOS HALLGATÓK RÉSZÉRE (Kérjük, hogy a megfelelő szakot jelölje be!) 2016. JANUÁR 21. Elérhető pontszám: 50 pont Megoldások 1. 6. 2. 7. 3. 8. 4. 9. 5. Össz.:
Differenciálegyenletek. Vajda István március 4.
 Analízis előadások Vajda István 2009. március 4. Függvényegyenletek Definíció: Az olyan egyenleteket, amelyekben a meghatározandó ismeretlen függvény, függvényegyenletnek nevezzük. Függvényegyenletek Definíció:
Analízis előadások Vajda István 2009. március 4. Függvényegyenletek Definíció: Az olyan egyenleteket, amelyekben a meghatározandó ismeretlen függvény, függvényegyenletnek nevezzük. Függvényegyenletek Definíció:
Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek
 Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E
Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E
1. Házi feladat. Határidő: I. Legyen f : R R, f(x) = x 2, valamint. d : R + 0 R+ 0
 = x 2, valamint. d : R + 0 R+ 0") I. Legyen f : R R, f(x) = 1 1 + x 2, valamint 1. Házi feladat d : R + 0 R+ 0 R (x, y) f(x) f(y). 1. Igazoljuk, hogy (R + 0, d) metrikus tér. 2. Adjuk meg az x {0, 3} pontok és r {1, 2} esetén a B r (x)
I. Legyen f : R R, f(x) = 1 1 + x 2, valamint 1. Házi feladat d : R + 0 R+ 0 R (x, y) f(x) f(y). 1. Igazoljuk, hogy (R + 0, d) metrikus tér. 2. Adjuk meg az x {0, 3} pontok és r {1, 2} esetén a B r (x)
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Az egyenlőtlenség mindkét oldalát szorozzuk meg 4 16-al:
 Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
3. Lineáris differenciálegyenletek
 3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
Matematika. 4. konzultáció: Kétváltozós függvények szélsőértéke. Parciális függvény, parciális derivált
 Matematika 1 NYME KTK, Egyetemi kiegészítő alapképzés 2004/2005. tanév, I. évf. I.félév Budapest Előadó: Dr. Takách Géza NyME FMK Informatikai Intézet 9400 Sopron, Bajcsy Zs. u. 9. GT fszt. 3. (99) 518
Matematika 1 NYME KTK, Egyetemi kiegészítő alapképzés 2004/2005. tanév, I. évf. I.félév Budapest Előadó: Dr. Takách Géza NyME FMK Informatikai Intézet 9400 Sopron, Bajcsy Zs. u. 9. GT fszt. 3. (99) 518
1. Parciális függvény, parciális derivált (ismétlés)
") Operációkutatás NYME Gazdaságinformatikus mesterképzés El adó: Kalmár János (kalmar[kukac]inf.nyme.hu) Többváltozós széls érték számítás Parciális függvény, parciális derivált Széls érték korlátos zárt
Operációkutatás NYME Gazdaságinformatikus mesterképzés El adó: Kalmár János (kalmar[kukac]inf.nyme.hu) Többváltozós széls érték számítás Parciális függvény, parciális derivált Széls érték korlátos zárt
Differenciálegyenletek numerikus megoldása
 a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
Optimalizálási eljárások GYAKORLAT, MSc hallgatók számára. Analízis R d -ben
 Optimalizálási eljárások GYAKORLAT, MSc hallgatók számára Analízis R d -ben Gyakorlatvezetõ: Hajnal Péter 2012. február 8 1. Konvex függvények Definíció. f : D R konvex, ha dom(f) := D R n konvex és tetszőleges
Optimalizálási eljárások GYAKORLAT, MSc hallgatók számára Analízis R d -ben Gyakorlatvezetõ: Hajnal Péter 2012. február 8 1. Konvex függvények Definíció. f : D R konvex, ha dom(f) := D R n konvex és tetszőleges
Matematika szigorlat, Mérnök informatikus szak I máj. 29.
 Matematika szigorlat, Mérnök informatikus szak I. 2007. máj. 29. Megoldókulcs 1. Adott az S : 3x 6y + 2z = 6 sík a három dimenziós térben. (a) Írja fel egy tetszőleges, az S-re merőleges S síknak az egyenletét!
Matematika szigorlat, Mérnök informatikus szak I. 2007. máj. 29. Megoldókulcs 1. Adott az S : 3x 6y + 2z = 6 sík a három dimenziós térben. (a) Írja fel egy tetszőleges, az S-re merőleges S síknak az egyenletét!
Analízis II. Analízis II. Beugrók. Készítette: Szánthó József. kiezafiu kukac gmail.com. 2009/ félév
 Analízis II. Analízis II. Beugrók Készítette: Szánthó József kiezafiu kukac gmail.com 2009/20 10 1.félév Analízis II. Beugrók Függvények folytonossága: 1. Mikor nevez egy függvényt egyenletesen folytonosnak?
Analízis II. Analízis II. Beugrók Készítette: Szánthó József kiezafiu kukac gmail.com 2009/20 10 1.félév Analízis II. Beugrók Függvények folytonossága: 1. Mikor nevez egy függvényt egyenletesen folytonosnak?
n 2 2n), (ii) lim Értelmezési tartomány, tengelymetszetek, paritás. (ii) Határérték. (iii) Első derivált, monotonitás, (ii) 3 t 2 2t dt,
, (ii) lim Értelmezési tartomány, tengelymetszetek, paritás. (ii) Határérték. (iii) Első derivált, monotonitás, (ii) 3 t 2 2t dt,") 205.05.9. Kalkulus I. NÉV:... A csoport EHA:... FELADATOK:. Definíció szerint és formálisan is határozzuk meg a h() = 3 2 függvény deriváltját az = 2 helyen. 8pt 2. Határozzuk meg a következő határértékeket:
205.05.9. Kalkulus I. NÉV:... A csoport EHA:... FELADATOK:. Definíció szerint és formálisan is határozzuk meg a h() = 3 2 függvény deriváltját az = 2 helyen. 8pt 2. Határozzuk meg a következő határértékeket:
Autonóm egyenletek, dinamikai rendszerek
 238 8. Autonóm egyenletek, dinamikai rendszerek 8.8. tétel. (Andronov Witt) 5 6 Ha a Γ periodikus pálya karakterisztikus multiplikátorainak abszolút értéke 1-nél kisebb, akkor a Γ pálya stabilis határciklus.
238 8. Autonóm egyenletek, dinamikai rendszerek 8.8. tétel. (Andronov Witt) 5 6 Ha a Γ periodikus pálya karakterisztikus multiplikátorainak abszolút értéke 1-nél kisebb, akkor a Γ pálya stabilis határciklus.
ANALÍZIS II. Példatár
 ANALÍZIS II. Példatár Többszörös integrálok 3. április 8. . fejezet Feladatok 3 4.. Kett s integrálok Számítsa ki az alábbi integrálokat:...3. π 4 sinx.. (x + y) dx dy (x + y) dy dx.4. 5 3 y (5x y y 3
ANALÍZIS II. Példatár Többszörös integrálok 3. április 8. . fejezet Feladatok 3 4.. Kett s integrálok Számítsa ki az alábbi integrálokat:...3. π 4 sinx.. (x + y) dx dy (x + y) dy dx.4. 5 3 y (5x y y 3
Gazdasági matematika II. vizsgadolgozat, megoldással,
 Gazdasági matematika II. vizsgadolgozat, megoldással, levelező képzés Definiálja az alábbi fogalmakat! 1. Kvadratikus mátrix invertálhatósága és inverze. (4 pont) Egy A kvadratikus mátrixot invertálhatónak
Gazdasági matematika II. vizsgadolgozat, megoldással, levelező képzés Definiálja az alábbi fogalmakat! 1. Kvadratikus mátrix invertálhatósága és inverze. (4 pont) Egy A kvadratikus mátrixot invertálhatónak
Tárgymutató. dinamika, 5 dinamikai rendszer, 4 végtelen sok állapotú, dinamikai törvény, 5 dinamikai törvények, 12 divergencia,
 Tárgymutató állapottér, 3 10, 107 általánosított impulzusok, 143 147 általánosított koordináták, 143 147 áramlás, 194 197 Arisztotelész mozgástörvényei, 71 77 bázisvektorok, 30 centrifugális erő, 142 ciklikus
Tárgymutató állapottér, 3 10, 107 általánosított impulzusok, 143 147 általánosított koordináták, 143 147 áramlás, 194 197 Arisztotelész mozgástörvényei, 71 77 bázisvektorok, 30 centrifugális erő, 142 ciklikus
Kettős integrál Hármas integrál. Többes integrálok. Sáfár Orsolya május 13.
 2015 május 13. Kétváltozós függvény kettősintegráljának definíciója Legyen f (x, y), R 2 R korlátos függvény egy T korlátos és mérhető területű tartományon. Vegyük a T tartomány egy felosztását T 1, T
2015 május 13. Kétváltozós függvény kettősintegráljának definíciója Legyen f (x, y), R 2 R korlátos függvény egy T korlátos és mérhető területű tartományon. Vegyük a T tartomány egy felosztását T 1, T
6. Függvények. Legyen függvény és nem üreshalmaz. A függvényt az f K-ra való kiterjesztésének
 6. Függvények I. Elméleti összefoglaló A függvény fogalma, értelmezési tartomány, képhalmaz, értékkészlet Legyen az A és B halmaz egyike sem üreshalmaz. Ha az A halmaz minden egyes eleméhez hozzárendeljük
6. Függvények I. Elméleti összefoglaló A függvény fogalma, értelmezési tartomány, képhalmaz, értékkészlet Legyen az A és B halmaz egyike sem üreshalmaz. Ha az A halmaz minden egyes eleméhez hozzárendeljük
Szélsőérték-számítás
 Szélsőérték-számítás Jelölések A következő jelölések mind az f függvény x szerinti parciális deriváltját jelentik: Ugyanígy az f függvény y szerinti parciális deriváltja: f x = xf = f x f y = yf = f y
Szélsőérték-számítás Jelölések A következő jelölések mind az f függvény x szerinti parciális deriváltját jelentik: Ugyanígy az f függvény y szerinti parciális deriváltja: f x = xf = f x f y = yf = f y
Gazdasági matematika II. vizsgadolgozat megoldása, június 10
 Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Nemlineáris jelenségek és Kao2kus rendszerek vizsgálata MATHEMATICA segítségével. Előadás: 10-12 Szerda, 215 Labor: 16-18, Szerda, 215
 Nemlineáris jelenségek és Kao2kus rendszerek vizsgálata MATHEMATICA segítségével Előadás: 10-12 Szerda, 215 Labor: 16-18, Szerda, 215 Célok: Ismerkedés a kao2kus dinamikával és ennek tanulmányozása. A
Nemlineáris jelenségek és Kao2kus rendszerek vizsgálata MATHEMATICA segítségével Előadás: 10-12 Szerda, 215 Labor: 16-18, Szerda, 215 Célok: Ismerkedés a kao2kus dinamikával és ennek tanulmányozása. A
(1 + (y ) 2 = f(x). Határozzuk meg a rúd alakját, ha a nyomaték eloszlás. (y ) 2 + 2yy = 0,
 2 = f(x). Határozzuk meg a rúd alakját, ha a nyomaték eloszlás. (y ) 2 + 2yy = 0,") Feladatok az 5. hétre. Eredményekkel és kidolgozott megoldásokkal. Oldjuk meg az alábbi másodrend lineáris homogén d.e. - et, tudva, hogy egy megoldása az y = x! x y xy + y = 0.. Oldjuk meg a következ
Feladatok az 5. hétre. Eredményekkel és kidolgozott megoldásokkal. Oldjuk meg az alábbi másodrend lineáris homogén d.e. - et, tudva, hogy egy megoldása az y = x! x y xy + y = 0.. Oldjuk meg a következ
(!), {z C z z 0 < R} K (K: konv. tart.) lim cn+1
, {z C z z 0 < R} K (K: konv. tart.) lim cn+1") Komlex analízis Komlex hatványsorok c n (z z 0 ) n ; R = lim n c n, R = (!), {z C z z 0 < R} K (K: konv. tart.) lim cn+ c n n=0. Van-e olyan komlex hatványsor, melynek a) üres a konvergenciatartománya,
Komlex analízis Komlex hatványsorok c n (z z 0 ) n ; R = lim n c n, R = (!), {z C z z 0 < R} K (K: konv. tart.) lim cn+ c n n=0. Van-e olyan komlex hatványsor, melynek a) üres a konvergenciatartománya,
T obbv altoz os f uggv enyek integr alja. 3. r esz aprilis 19.
 Többváltozós függvények integrálja. 3. rész. 2018. április 19. Kettős integrál Kettős integrál téglalap alakú tartományon. Ismétlés Ha = [a, b] [c, d] téglalap-tartomány, f : I integrálható függvény, akkor
Többváltozós függvények integrálja. 3. rész. 2018. április 19. Kettős integrál Kettős integrál téglalap alakú tartományon. Ismétlés Ha = [a, b] [c, d] téglalap-tartomány, f : I integrálható függvény, akkor
1. Oldja meg a z 3 (5 + 3j) (8 + 2j) 2. Adottak az A(1,4,3), B(3,1, 1), C( 5,2,4) pontok a térben.
 (8 + 2j) 2. Adottak az A(1,4,3), B(3,1, 1), C( 5,2,4) pontok a térben.") Szak: Műszaki menedzser I. Dátum: 006. június. MEGOLDÓKULCS Tárgy: Matematika szigorlat Idő: 0 perc Neptun kód: Előadó: Berta Gábor szig 06 06 0 Pontszám: /00p. Oldja meg a z (5 + j (8 + j + = (+5j (7
Szak: Műszaki menedzser I. Dátum: 006. június. MEGOLDÓKULCS Tárgy: Matematika szigorlat Idő: 0 perc Neptun kód: Előadó: Berta Gábor szig 06 06 0 Pontszám: /00p. Oldja meg a z (5 + j (8 + j + = (+5j (7
SZÉLSŐÉRTÉKKEL KAPCSOLATOS TÉTELEK, PÉLDÁK, SZAKDOLGOZAT ELLENPÉLDÁK. TÉMAVEZETŐ: Gémes Margit. Matematika Bsc, tanári szakirány
 SZÉLSŐÉRTÉKKEL KAPCSOLATOS TÉTELEK, PÉLDÁK, ELLENPÉLDÁK SZAKDOLGOZAT KÉSZÍTETTE: Kovács Dorottya Matematika Bsc, tanári szakirány TÉMAVEZETŐ: Gémes Margit Műszaki gazdasági tanár Analízis tanszék Eötvös
SZÉLSŐÉRTÉKKEL KAPCSOLATOS TÉTELEK, PÉLDÁK, ELLENPÉLDÁK SZAKDOLGOZAT KÉSZÍTETTE: Kovács Dorottya Matematika Bsc, tanári szakirány TÉMAVEZETŐ: Gémes Margit Műszaki gazdasági tanár Analízis tanszék Eötvös
Matematika III. harmadik előadás
 Matematika III. harmadik előadás Kézi Csaba Debreceni Egyetem, Műszaki Kar Debrecen, 2013/14 tanév, I. félév Kézi Csaba (DE) Matematika III. harmadik előadás 2013/14 tanév, I. félév 1 / 13 tétel Az y (x)
Matematika III. harmadik előadás Kézi Csaba Debreceni Egyetem, Műszaki Kar Debrecen, 2013/14 tanév, I. félév Kézi Csaba (DE) Matematika III. harmadik előadás 2013/14 tanév, I. félév 1 / 13 tétel Az y (x)
Dierenciálhatóság. Wettl Ferenc el adása alapján és
 205.0.9. és 205.0.26. 205.0.9. és 205.0.26. / Tartalom A dierenciálhatóság fogalma Pontbeli dierenciálhatóság Jobb és bal oldali dierenciálhatóság Folytonosság és dierenciálhatóság Deriváltfüggvény 2 Dierenciálási
205.0.9. és 205.0.26. 205.0.9. és 205.0.26. / Tartalom A dierenciálhatóság fogalma Pontbeli dierenciálhatóság Jobb és bal oldali dierenciálhatóság Folytonosság és dierenciálhatóság Deriváltfüggvény 2 Dierenciálási
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
BIOMATEMATIKA ELŐADÁS
 BIOMATEMATIKA ELŐADÁS 6. Differenciálegyenletekről röviden Debreceni Egyetem, 2015 Dr. Bérczes Attila, Bertók Csanád A diasor tartalma 1 Bevezetés 2 Elsőrendű differenciálegyenletek Definíciók Kezdetiérték-probléma
BIOMATEMATIKA ELŐADÁS 6. Differenciálegyenletekről röviden Debreceni Egyetem, 2015 Dr. Bérczes Attila, Bertók Csanád A diasor tartalma 1 Bevezetés 2 Elsőrendű differenciálegyenletek Definíciók Kezdetiérték-probléma
Kalkulus I. NÉV: Határozzuk meg a következő határértékeket: 8pt
 27.2.2. Kalkulus I. NÉV:... A csoport KÓD:.... Adjuk meg a b n = 3n 7 9 2n sorozat infimumát, szuprémumát. 8pt 2. Határozzuk meg a következő határértékeket: 8pt (a) ( lim n 2 3n n 2 n 3) n ( ) 3n 5 3 2n,
27.2.2. Kalkulus I. NÉV:... A csoport KÓD:.... Adjuk meg a b n = 3n 7 9 2n sorozat infimumát, szuprémumát. 8pt 2. Határozzuk meg a következő határértékeket: 8pt (a) ( lim n 2 3n n 2 n 3) n ( ) 3n 5 3 2n,
0-49 pont: elégtelen, pont: elégséges, pont: közepes, pont: jó, pont: jeles
 Matematika szigorlat, Mérnök informatikus szak I. 2013. jan. 10. Név: Neptun kód: Idő: 180 perc Elm.: 1. f. 2. f. 3. f. 4. f. 5. f. Fel. össz.: Össz.: Oszt.: Az elérhető pontszám 40 (elmélet) + 60 (feladatok)
Matematika szigorlat, Mérnök informatikus szak I. 2013. jan. 10. Név: Neptun kód: Idő: 180 perc Elm.: 1. f. 2. f. 3. f. 4. f. 5. f. Fel. össz.: Össz.: Oszt.: Az elérhető pontszám 40 (elmélet) + 60 (feladatok)
Matematika M1 Gyakorlat
 Matematika M Gyakorlat BME - Gépésmérnök MSc Gyakorló Feladatsor. Zh. Határoa meg a α paraméter értékét úgy hogy a vx y = αx y xy 4y 3 3 kétváltoós függvény egy reguláris komplex függvény képetes rése
Matematika M Gyakorlat BME - Gépésmérnök MSc Gyakorló Feladatsor. Zh. Határoa meg a α paraméter értékét úgy hogy a vx y = αx y xy 4y 3 3 kétváltoós függvény egy reguláris komplex függvény képetes rése
Differenciálegyenletek gyakorlat Matematika BSc II/2, elemző szakirány
 A sebesség fogalmának szemléltetése az Differenciálegyenletek gyakorlat Matematika BSc II/, elemző szakirány. gyakorlat ẋ(t) = lim h 0 x(t+h) x(t) h képlet alapján, ahol t jelöli az időt, x pedig az elmozdulást.
A sebesség fogalmának szemléltetése az Differenciálegyenletek gyakorlat Matematika BSc II/, elemző szakirány. gyakorlat ẋ(t) = lim h 0 x(t+h) x(t) h képlet alapján, ahol t jelöli az időt, x pedig az elmozdulást.
(x + 1) sh x) (x 2 4) = cos(x 2 ) 2x, e cos x = e
 sh x) (x 2 4) = cos(x 2 ) 2x, e cos x = e") Az. gyakorlat HF-inak megoldása. Deriváljuk az alábbi függvényeket. sin x cos x = cos x sin x, x ln x = x / ln x + x x x, x x = x / = x/ = = e x cos x+e x sin x e x cos x cos x, x sin x ln x = + x x, x
Az. gyakorlat HF-inak megoldása. Deriváljuk az alábbi függvényeket. sin x cos x = cos x sin x, x ln x = x / ln x + x x x, x x = x / = x/ = = e x cos x+e x sin x e x cos x cos x, x sin x ln x = + x x, x
6. Folytonosság. pontbeli folytonosság, intervallumon való folytonosság, folytonos függvények
 6. Folytonosság pontbeli folytonosság, intervallumon való folytonosság, folytonos függvények Egy függvény egy intervallumon folytonos, ha annak miden pontjában folytonos. folytonos függvények tulajdonságai
6. Folytonosság pontbeli folytonosság, intervallumon való folytonosság, folytonos függvények Egy függvény egy intervallumon folytonos, ha annak miden pontjában folytonos. folytonos függvények tulajdonságai