BSc szakdogozat. Természettudományi Kar Matematika BSc szak június 3.
|
|
|
- Ottó Kelemen
- 5 évvel ezelőtt
- Látták:
Átírás
1 EÖTVÖS LORÁND TUDOMÁNYEGYETEM Biszak Előd Tamás Digitalizált térképek 3-dimenziós ábrázolása Témavezető: Dr. Csikós Balázs BSc szakdogozat Természettudományi Kar Matematika BSc szak június 3.
2 Kivonat A szakdolgozatban digitalizált térképek 3-dimenziós ábrázolásának elméleti kérdéseivel foglalkoztam. Ha egy adott térképet 3-dimenzióban, domborzattal együtt szeretnénk megjeleníteni, az első fontos feladat, hogy ismerjük a térkép milyen módon, milyen eljárással lett levetítve a földgömbről. Ezen információk alapján meg kell tudnunk állapítani a térkép tetszőleges pontjának földrajzi koordinátái, az adott ponton a tengerszint feletti magasságot. Ezért az első fejezet a térképészeti vetületekkel, tulajdonságaikkal, vetületi átszámításokkal foglalkozik. A második fejezetben a program egy rövid leírása történik, amelyben működése matematikai hátterét ismerhetjük meg, valamint néhány monitorkép is bemutatásra kerül az eredmények szemléltetése végett.
3 Tartalomjegyzék Kivonat i Ábrák jegyzéke iii 1. Térképészeti vetületek Hiperfelületekről általánosan dimenziós felületekről Ívhossz Szög Terület A gömb vetületei Kúpvetületek Azimutális vetületek Hengervetületek A forgási ellipszoidról Az alkalmazásról Működés Egy pixel útja Mozgás Monitorképek Irodalomjegyzék 37 ii
4 Ábrák jegyzéke 1.1. Kúpvetületek Körcikk poláris és Descartes-féle koordinátái közötti összefüggés Perspektív vetítés gömbről síkra Azimutális vetületek vetületi egyenletei A gnomikus vetület Az ortografikus vetület A sztereografikus projekció Területtartó azimutális vetület Meridiánokon hossztartó azimutális vetület A területtartó hengervetület Cassini-vetület vetületi egyenletei Rodrigues-formula adott v R 3 vektor egyenes körüli elforgatottjára Kárpátok a Második katonai felmérésen Dunakanyar a Második katonai felmérésen I Dunakanyar a Második katonai felmérésen II Dunakanyar a Harmadik katonai felmérésen Dunakanyar a Második katonai felmérésen III Dunakanyar a Második katonai felmérésen IV Budapest és környéke a Második katonai felmérésen Balaton a Harmadik katonai felmérésen Balaton a Második katonai felmérésen iii
5 1. fejezet Térképészeti vetületek Mivel a Föld szabálytalan idom, először olyan idommal kell helyettesítenünk, amely alakját és méreteit tekintve jól közelíti a Föld felszínét, de matematikaiag jól kezelhető. Ez az úgynevezett alapfelület. Alapfelületnek forgási ellipszoidot vagy gömböt szoktunk választani. Ha adott egy térkép ( jelölés: Ω ), legyen f : Ω M leképezés, amelyben M jelöli az alapfelületet, egy p Ω pont képe, azon p M, amit ábrázol. Ekkor ezen f függvény az alapfelület, vagy egy részének egy paraméterezését adja. Ha két térképünk van ( jelölés: Ω 1, Ω 2 ), amelyek adott alapfelület ugyanazon részét ábrázolják, és adott p Ω 1 pont Ω 2 beli koordinátáját szeretnénk megtudni, akkor ehhez egy adott felület két paraméterezése közötti átmeneti leképezést kell ismernünk. Tehát térképészeti vetület alatt az adott alapfelület paraméterezéseit ( térképeit ) fogjuk érteni, azon megkötéssel, hogy ez folytonosan differenciálható legyen Hiperfelületekről általánosan 1. Definíció. Egy R n -beli C m -osztályú paraméterezett hiperfelület egy Ω R n 1 nyílt tartományból R n -be menő r : Ω R n C m -osztályú leképezés. Ω lefedhető a koordinátatengelyekkel párhuzamos egyenesekkel, melyek természetes módon paraméterezhetők egy t u 0 +te i leképezéssel, ahol u 0 Ω, e i = (0,..., 0, 1, 0,... 0). A t r(u 0 + te i ) görbék az r paraméterezés paramétervonalai. A paramétervonalak 1
6 1. fejezet Térképészeti vetületek 2 sebességvektora t = 0-ban: d dt r(u 0 + te i ) t=0 = i r(u 0 ) =: r i (u 0 ). Tehát r 1 (u 0 ),..., r n 1 (u 0 ) az r(u 0 )-ot átmenő paramétervonalak sebességvektorai. 2. Definíció. r reguláris paraméterezés, ha legalább C 1 -osztályú és a parciális deriváltak lineárisan függetlenek u 0 Ω esetén. Ezentúl feltesszük, hogy a paraméterezés injektív és reguláris. Legyen M az r leképezés értékkészlete. Ha feltesszük, hogy a paraméterezés injektív akkor tetszőleges p = r(u 0 ) ponton t = 0 időpillanatban áthaladó M-beli γ görbe paraméterezhető r u alakban, ahol u : [a, b] Ω, sima paraméterezett görbe, 0 [a, b], u(0) = u 0. Ekkor ezen görbe sebbeségvektora a t = 0 időpillanatban n 1 γ (0) = r i (u 0 ) u i (0), (1.1) i=1 ahol u i az u i-edik koordinátafüggvényét jelöli. Tehát a parciális deriváltak egy lineáris kombinációja, valamint tetszőleges lineáris kombinációjuk megadja egy p-n átmenő görbe p-beli sebességvektorát. beli érintőtere. T p M jel = {r 1 (u 0 ),..., r n 1 (u 0 ) lineáris kombinációi } = M p- 3. Definíció. Az r paraméterezett hiperfelület N egységnormális mezője az az N : Ω R n leképezés, melyre: N(u 0 ) merőleges r i (u 0 )-ra i = 1... n 1 N(u 0 ) = 1 r 1 (u 0 ),..., r n 1 (u 0 ), N(u 0 ) pozitív irányításúak. Az N vektormezőt n = 3 esetén a következő képpen számolhatjuk ki: N = r 1 r 2 r 1 r 2 4. Definíció. A hiperfelület első alapformája a p = r(u 0 ) pontban az a I p : T p M T p M R
7 1. fejezet Térképészeti vetületek 3 leképezés, melyre I p (v, w) = v, w, ahol.,. a szokásos skaláris szorzatot jelöli. 5. Definíció. A hiperfelület második alapformája a p = r(u 0 ) pontban az a II p : T p M T p M R leképezés, melyre II p (v, w) = n 1 i,j=1 r ij (u 0 ), N(u 0 ) v i w j, ahol a v i és w i számok a v és w vektorok koordinátái az r 1 (u 0 ),..., r n 1 bázisban. Ezen bilineáris függvényekhez tartozó mátrixokat a r 1 (u 0 ),..., r n (u 0 ) bázisban jelöljük G(u 0 )-val, illetve B(u 0 )-val. Ekkor: G(u 0 ) = r 1 (u 0 ), r 1 (u 0 )... r 1 (u 0 ), r n 1 (u 0 )..... r n 1 (u 0 ), r 1 (u 0 )... r n 1 (u 0 ), r n 1 (u 0 ) B(u 0 ) = r 1,1 (u 0 ), N(u 0 )... r 1,n 1 (u 0 ), N(u 0 )..... r n 1,1 (u 0 ), N(u 0 )... r n 1,n 1 (u 0 ), N(u 0 ) dimenziós felületekről Az előző részben szereplő G = {g ij } n 1 i,j=1 távolságokról, területekről, szögekről. mátrix mindent elárul az adott felületen A fenti jelölésekkel legyen γ = r u egy felületen futó görbe. Ekkor I p (γ (t), γ (t)) = γ (t), γ (t) =
8 1. fejezet Térképészeti vetületek 4 r 1 (u(t))u 1 (t) + r2 (u(t))u 2 (t), r1 (u(t))u 1 (t) + r2 (u(t))u 2 (t) = g 11 (t)(u 1 (t)) 2 + 2g 12 (t)u 1 (t)u 2 (t) + g22 (t)(u 2 )(t) 2, ahol g ij (t) az r(u(t)) ponthoz tartozó fent definiált G(u(t)) mátrix megfelelő eleme Ívhossz Legyen γ felületen futó görbe. Jelölje l(γ) az ívhosszt. Ekkor a fenti jelölésekkel: l(γ) = = a b b a γ (t) dt = b a γ (t), γ (t) dt g 11 (t)(u 1 (t)) 2 + 2g 12 (t)u 1 (t)u 2 (t) + g 22 (t)(u 2 (t)) 2 A képletből azonnal látszik, hogy ha G(t) = I, t [a, b], akkor az adott görbe hossztartó módon parametrizálódik, illetve, ha G(t) = λi, λ R, akkor λ arányú nyújtás történik. Ha feltesszük, hogy u C 1, akkor könnyen látható, hogy a γ = r u paraméterezés akkor és csak akkor hossztartó, ha f 1 (t) jel = g 11 (t)(u 1 (t)) 2 + 2g 12 (t)u 1 (t)u 2 (t) + g 22 (t)(u 2 (t)) 2 (u 1 (t)) 2 + (u 2 (t)) 2 = f 2 (t) jel = t [a, b]. Ha ugyanis lenne egy olyan t 1 [a, b], melyre ez nem teljesülne, például f 1 (t 1 ) > f 2 (t 1 ) lenne, akkor annak egy elég kis U környezetére létezne olyan ɛ > 0, melyre igaz, hogy f 1 (t) > f 2 (t) + ɛ t U-ra. Ekkor viszont ezen az U [a, b]-n nem lehetne egyenlő a két integrál. Tehát a hossztartóság szükséges és elégséges feltétele, hogy (g 11 (t) 1)(u 1 (t)) 2 + 2g 12 (t)u 1 (t)u 2 (t) + (g22 (t) 1)(u 2 (t)) 2 = 0 t [a, b] (1.2) teljesüljön. Legyen most r : Ω R 3, s : Ω R 3 két paraméterezett felület G r = {g ij } 3 i,j=1, illetve G s = {h ij } 3 i,j=1 első alapforma mátrixokkal, M r, illetve M s értékkészletekkel. Legyen γ = r u, u : [a, b] Ω az M r, illetve ˆγ = s u az M s felületen futó görbe. Világos,
9 1. fejezet Térképészeti vetületek 5 hogy annak a szükséges és elégséges feltétele, hogy tetszőleges [a, b ] [a, b]-re a γ [a,b ] és ˆγ [a,b ] hosszaik megegyezzenek: f 1 (t) jel = g 11 (t)(u 1 (t)) 2 + 2g 12 (t)u 1 (t)u 2 (t) + g 22 (t)(u 2 (t)) 2 (h 11 (t)(u 1 (t)) 2 + 2h 12 (t)u 1 (t)u 2 (t) + h 22 (t)(u 2 (t)) 2 = f 2 (t) jel = t [a, b]-re azaz, hogy (g 11 (t) h 11 (t))(u 1 (t)) 2 + 2(g 12 (t) h 12 (t))u 1 (t)u 2 (t) + (g22 (t) h 22 (t))(u 2 (t)) 2 = 0 (1.3) t [a, b]-re. Ha ugyanis lenne egy olyan t 1 [a, b], melyre ez nem teljesülne, például f 1 (t 1 ) > f 2 (t 1 ) lenne, akkor annak egy elég kis U környezetére létezne olyan ɛ > 0, melyre igaz, hogy f 1 (t) > f 2 (t) + ɛ t U-ra. Ekkor viszont ezen az U [a, b]-n nem lehetne egyenlő a két integrál Szög 6. Definíció. Ha γ, φ két felületen futó, t 0 időpillanatban metsző, a t 0 pontban regulárian paraméterezett görbe, akkor az általuk bezárt α szögön a γ (t 0 ) és φ (t 0 ) vektorok által bezárt α szöget értjük. Ekkor cos α = γ (t 0 ), φ (t 0 ) γ (t 0 ) φ (t 0 ). Azonnal látszik, hogy pontosan akkor szögtartó egy pontban a paraméterezés, ha G = λi, mivel γ = r u, φ = r v-ből γ (t 0 ), φ (t 0 ) γ (t 0 ) φ (t 0 ) = g 11 u 1 v 1 + 2g12 u 1 v 2 + g22 u 2 v 2, g 11 (u 1 ) 2 + 2g 12 u 1 u 2 + g 22 (u 2 ) g 2 11 (v 1 ) 2 + 2g 12 v 1 v 2 + g 22 (v 2 ) 2 ahonnan G = λi-ből. λu 1 v 1 + λu 2 v 2 λ(u = u1 v1 + u2 v2. 1 ) 2 + λ(u 2 ) 2 λv λv 2 2 (u 1 ) 2 + (u 2 ) (v 2 1 ) 2 + (v 2 ) 2
10 1. fejezet Térképészeti vetületek 6 Illetve ellenkező esetben, ha g 12 nem nulla akkor r 1, r 2, ha g 11 g 22, akkor r 1, r 1 + r 2 triviális ellenpélda. 1. Állítás. Legyen r : Ω R3, s : Ω R 3 két paraméterezett felület G r = {g ij } 3 i,j=1, illetve G s = {h ij } 3 i,j=1 első alapforma mátrixokkal. Legyenek γ = r u, φ = r v az első felületen futó, r(u 0 ) pontban metsző regulárisan paraméterezett görbék. Legyen továbbá ˆγ = s u, ˆφ = s v a γ és φ által az s felületen meghatározott görbék. Ekkor a ˆγ és ˆφ által bezárt szög akkor, és csak akkor egyezik meg a γ és φ által bezárttal tetszőleges γ és φ esetén, ha G r = λg s, valamilyen λ : Ω R-re. Bizonyítás. Tegyük fel, hogy G r = λg s, valamilyen λ : Ω R-re. Ekkor λ 0 = λ(u 0 ) jelöléssel γ (t 0 ), φ (t 0 ) γ (t 0 ) φ (t 0 ) = g 11 u 1 v 1 + 2g12 u 1 v 2 + g22 u 2 v 2 g 11 (u 1 ) 2 + 2g 12 u 1 u 2 + g 22 (u 2 ) 2 g 11 (v 1 ) 2 + 2g 12 v 1 v 2 + g 22 (v 2 ) 2 ( ) λ 0 h 11 u 1 v 1 + 2h12 u 1 v 2 + h22 u 2 v 2 = ( ) λ 0 h 11 (u 1 ) 2 + 2h 12 u 1 u 2 + h 22 (u 2 ) 2 h 11 (v 1 ) 2 + 2h 12 v 1 v 2 + h 22 (v 2 ) 2 = ˆγ (t 0 ), ˆφ (t 0 ) ˆγ (t 0 ) ˆφ (t 0 ) Ellenkező esetben tekintsük az r 1, r 2, illetve a nekik megfelelő s 1, s 2 bezárt szögei közötti összefüggést: r 1, r 2 r1, r 1 r 2, r 2 = g 12 g11 g22 = λ 1 h 12 λ2 h 11 λ3 g 22, ami a λ 1 = λ 2 λ 3 esettől eltekintve ellenpélda. Ha λ 1 = λ 2 λ 3 r 1, illetve r 1 + r 2 és s 1, s 1 + s 2 bezárt szögei különböznek Terület Legyen R M kompakt lezárású nyílt, jelölje A(R) R felszínét. Ekkor D = r 1 (R) jelöléssel: A(R) = D r 1 (u, v) r 2 (u, v) d(u, v)
11 1. fejezet Térképészeti vetületek 7 Az integrandus négyzete, szemelőtt tartva a sin 2 φ + cos 2 φ = 1 összefüggést, melyből ( ) r1 r r 1 r 2 ( ) r1, r 2 2 = 1 r 1 r 2 a következővel egyenlő: r 1 r 2 2 = r 1 2 r 2 2 r 1, r 2 2 = g 11 g 22 g 12 g 21 = det G. Ebből azonnal látszik, hogy a területtartás elégséges feltétele, hogy det G(u, v) = 1 (u, v) Ω legyen. A szükségesség az (u, v) det G(u, v) függvény folytonosságából következik. Ha van egy olyan p = (u 0, v 0 ) pont, melyre például det G(u 0, v 0 ) > 1, akkor annak van egy kis U p környezete, ahol det G > 1 + ɛ valamely elég kicsi ɛ > 0-ra. Tehát det G(u, v)d(u, v) > (1 + ɛ) A(Up ) > A(U p ). U p 2. Állítás. Legyen r : Ω R3, s : Ω R 3 két paraméterezett felület G r = {g ij } 3 i,j=1, illetve G s = {h ij } 3 i,j=1 első alapforma mátrixokkal, valamint M r, illetve M s értékkészletekkel. Ekkor A(R) = A ( s ( r 1 (R) )) R M r kompakt lezárású nyílt det G r (p) = det G s (p) p Ω Bizonyítás. Tegyük fel, hogy det G r (p) = det G r (p) u Ω. Legyen R M r tetszőleges kompakt lezárású nyílt halmaz. D jel = r 1 (R). Ekkor A(R) = D det Gr (u, v)d(u, v) = D det Gs (u, v)d(u, v) = A(s(D)). Ha létezik p 1 Ω, amelyre például det G r (p 1 ) > det G s (p 1 ), akkor a det függvény folytonossága miatt létezik ɛ > 0 és p 1 -nak kis U környezete, melyre
12 1. fejezet Térképészeti vetületek 8 det G r (p) > det G s (p) + ɛ p U, melyből A(U) = r 1 (U) det Gr (u, v)d(u, v) > det Gs (u, v)d(u, v) = A(s(r 1 (U))) r 1 (U) 1.3. A gömb vetületei Ebben a részben az M alapfelületnek az R sugarú gömböt választjuk. Vetületen tehát egy legalább C 1 osztályú paraméterezést értünk valamely Ω R 2 paramétertartománnyal. A gömb standard paraméterezése azon r : [ π, π] ( π 2, π 2 ) R3 leképezést értjük, mely a (λ, ϕ) ponthoz az (R sin λ cos ϕ, R sin ϕ, R cos λ cos ϕ) pontot rendeli. Egy adott vetület vetületi egyenletén azon f : [ π, π] ( π 2, π 2 ) R2 függvényt értjük, mely egy adott p M pont (ϕ, λ) standard koordinátáihoz az adott vetületbeli koordinátáit rendeli. Északi póluson a r(0, π 2 ), déli póluson az r(0, π 2 ) pontot értjük. Paralelkörök, illetve meridiánok alatt a standard paraméterezés első, illetve második változó szerinti paramétervonalait értjük. Kezdőmeridiánon, illetve egyenlítőn a [0, 2π] t r(0, π 2 + t 2 ), illetve a [0, 2π] t r( π + t) görbéket értjük Kúpvetületek Egy vetületet akkor nevezünk kúpvetületnek, ha a paramétertartomány egy körcikk és létezik egy P pont a gömbön, melyre a P -n átmenő főkörök képei egy O középpontú sugársorhoz tartoznak;
13 1. fejezet Térképészeti vetületek ábra. Kúpvetületek. az OP egyenesre merőleges síkok által kimetszett körök képei O középpontú koncentrikus körök ívei. Minden kör úgy képződik a neki megfelelő körívre, hogy azonos hosszú körívek képei is azonos hosszúak. Az egyszerűség kedvéért most normális elhelyezésű kúpvetületekkel fogunk foglalkozni, amikor is ez a P pont az északi pólus. Ekkor persze a sugársort a meridiánképek alkotják, a koncentrikus köröket pedig a paralelkörök képei. A p 0 sugarú Ω körcikket természetes módon paraméterezhetjük poláris koordinátákkal, úgy hogy egy A Ω pont (p, γ) koordinátái az egyik r 0 kezdősugárral bezárt szög, valamint a középponttól való távolság. Ekkor az 1.2. ábrán látható módon elhelyezett körcikk egy A (p, γ) koordinátájú pontjának koordinátái az ábrán berajzolt derékszögű koordináta-rendszerben: x = p sin γ, y = p 0 p cos γ.
14 1. fejezet Térképészeti vetületek ábra. Körcikk poláris és Descartes-féle koordinátái közötti összefüggés. Kúpvetületekhez tartozó paraméterezés, a szög-, illetve területtartóság feltétele Legyen A Ω az (α, r) polár-koordinátájú pont. Jelölje f : r [ π 2, π 2 ] azt a leképezést, amely az r-hez azt a szöget rendeli, amelyhez tartozó paralelkör képe az O körüli r sugarú körív. Tegyük fel, hogy α a kezdőmeridián képével bezárt szög. Ekkor az α szögű pontokhoz tartozó meridián, ha a körcikk szöge α 0, 2π α 0 α =: cα, és R-et 1-nek választjuk, p(r, α) def = r(cα, f(r)) = (sin cα cos f(r), sin f(r), cos cα cos f(r)). Ebből tetszőleges normális elhelyezésű kúpvetülethez tartozó paraméterezés:
15 1. fejezet Térképészeti vetületek 11 s(x, y) = ( ) y sin c arcsin cos f( y 2 + (x p 0 ) 2 ) y 2 +(x p 0 ) 2 sin f( y 2 + (x p 0 ) 2 ) ( ) y cos c arcsin cos f( y 2 + (x p 0 ) 2 ) y 2 +(x p 0 ) 2 T Ebből P (r, α) def = p 1(r, α) p 2 (r, α) sin cα sin f(r)f (r) cos f(r)f (r) cos cα sin f(r)f (r) c cos cα cos f(r) 0 c sin cα cos f(r)) Ekkor a p paraméterezés Ĝ első alapforma mátrixa az (r, α) pontban: Ĝ(r, α) = (f (r)) c 2 cos 2 f(r) Legyen q : R + [ π, π] R 3 a sík poláris koordinátázása, azaz q(r, α) = (r sin α, r cos α, 0). Ekkor q 1 (r, α) = (sin α, cos α, 0), q 2 (r, α) = (r cos α, r sin α, 0), q 1, q 1 = 1, q 2, q 2 = r 2, q 1, q 2 = 0, ahonnan G p (r, α) = r 2. (1.4) Innen a 1. állítás alapján a vetület pontosan akkor szögtartó, ha Ĝ(r, α) = (f (r)) c 2 cos 2 f(r) = λ(r) r 2,
16 1. fejezet Térképészeti vetületek 12 valamilyen λ : R R függvényre, azaz c 2 cos 2 f(r) = (f (r)) 2 r 2, vagyis ha kielégíti a következő differenciálegyenletet: f cos f(r) (r) = ±c r (1.5) Mivel det G p (r, α) = r, a területtartóság feltétele a 2. állítás alapján, hogy f kielégítse a következő differenciál egyenlletet: cf (r) cos f(r) = r. (1.6) Példa szögtartó kúpvetületre Szögtartó kúpvetület azon x = p sin[n(λ λ 0 )], y = p 0 p cos[n(λ λ 0 )] vetületi egyenletekkel megadott vetület, melyben n = lg(cos ϕ 1 sec ϕ 2 ) lg [ tan( 1 4 π ϕ 2) cot( 1 4 π ϕ 1) ], p = F tan n ( 1 4 π ϕ), p 0 = F tan n ( 1 4 π ϕ 0), F = cos ϕ 1 tan n ( 1 4 π ϕ 1), n ahol ϕ, λ a standard koordináták, ϕ 1, ϕ 2 adott paralelkör, λ 0, ϕ 0 adott meridiánhoz, illetve paralelkörhöz tartozó szögértékek. 3. Állítás. Ez a vetület tényleg szögtartó.
17 1. fejezet Térképészeti vetületek 13 Bizonyítás. A fenti jelölésekkel c = 1 n, ( n r f(r) = 2 arctan F ) π 2, f (r) = ( r F ) 2 n 1 ( r ) 1 n 1 1 n F F = 2 ( rn ( r F ) 1 n 1 + ( r F ) 2 ). n Ahonnan a cos(t) = 1 tan2 ( 1 2 t) 1 + tan 2 ( 1 2 t) képletből: továbbá cos f(r) c r tovább alakítva = 1 1 tan 2 ( 1 2 f(r)) ( ( n r ( 1 + tan ( 1 tan2 arctan n r ) ) F + π = 2f(r))) nr ( 1 + tan ( 2 arctan ( ) )) n r F + π, 4 ( tan (arctan 2 n r F ) + π ) ( ( ( tan arctan n r )) F + tan π 4 = 4 1 tan ( arctan ( )) n r F tan π 4 ( n r F = + 1 ) 2 ( r ) 2 n F + 2 ( r F = 1 n r F ( r F ) 2 n 2 ( r F ) 1 ) 2, n + 1 ) 1 n ( r F ) 2n +2( r F ) 1n +1 ( r F ) 2n 2( r F ) 1n +1 ( ) = nr 1 + ( r F ) 2n +2( r F ) 1n +1 ( r F ) 2n 2( r F ) 1n +1 ) 1 n 4 ( r F ( nr 2 ( ) 2 ) = r n F + 2 ) 1 n F ) 2 2 ( r ( ( ) = f (r). nr r n F Azimutális vetületek Egy vetületet akkor nevezünk azimutálisnak, ha létezik egy p M pont, amelyre: a p-n átmenő főkörök vetített képei sugársort alkotnak, melynek tartópontja a pont p képe.
18 1. fejezet Térképészeti vetületek 14 ezen főkörök bezárt szögei megegyeznek a képeik által bezárt szögekkel a p-hez tartozó átmérőre merőleges síkok által a gömbből kimetszett körök képei koncentrikus körök p középponttal. Ezen p pontot nevezzük a vetületi kezdőpontnak. Perspektív síkvetületek Perspektív síkvetületnek azon azimutális vetületeket nevezzük, amikor egy adott p ponton áthaladó átmérőn adott Q pontból egy adott, az átmérőre merőleges s síkra vetítjük a gömb pontjait. Ezt a p pontot nevezzük vetületi kezdőpontnak, a Q pontot vetítési középpontnak, az s síkot képfelületnek nevezzük. Ha a vetületi kezdőpont az egyik pólus, akkor normális, ha az egyenlítő síkjában fekszik, akkor transzverzális vetületről beszélünk. Ha pedig egyéb helyzetben van akkor ferdetengelyű vetületnek hívjuk. Vezessük le a perspektív síkvetületekhez tartozó vetületi egyenleteket. Az egyszerűség kedvéért feltesszük, hogy a K középpont a kezdőmeridiánon fekszik. Legyen a K (ϕ 0, λ 0 ) standard koordinátájú pont a vetületi kezdőpont, Q a vetítési középpont D távolságra a gömb közzéppontjától. Az s sík f előjeles távolságra helyezkedjen K-tól, ahol a pozitív irány a Q irányával ellentétes. Rajta vegyük fel a pozitív irányítású derékszögű koordinátarendszert úgy, hogy K képe legyen az origó, az x tengely legyen a KP főkör képe, ahol P az északi pólust jelöli. Legyen A egy tetszőleges (λ, ϕ) koordinátájú vetíteni kívánt pont. Ekkor a P KA gömbháromszög oldalai: P K = π 2 ϕ 0 =: β 0, P A = π 2 ϕ =: β, KA =: β. Legyen F az a pont, amit úgy kapunk, hogy A-ból merőlegest bocsátunk a QK egyenesre. Ekkor: tehát KA F A = QK QF, KA = F A QK, QF
19 1. fejezet Térképészeti vetületek ábra. Perspektív vetítés gömbről síkra. F A = R sin β, QF = D + R cos β, QK = D + R + f, amiből p := AK R sin β = (D + R + f) D + R cos β. A P KA gömbháromszögre a gömbi koszinusz-, illetve szinusztételből sin α sin β = sin λ sin β, cos β = cos β 0 cos β + sin β 0 sin β cos λ, valamint érvényes rá a következő összefüggés: cos α sin β = sin β 0 cos β cos β 0 sin β cos λ, Bizonyítás. A koszinusztétel alapján cos λ = cos β cos β cos β 0 sin ββ 0, cos α = cos β cos β cos β 0 sin β β 0
20 1. fejezet Térképészeti vetületek 16. Ezeket a képletbe helyettesítve: cos β cos β cos β 0 β 0 = sin β 0 sin β cos β 0(cos β cos β cos β 0 ) sin β 0 cos β cos β cos β 0 = sin 2 β 0 cos β cos β 0 cos β + cos 2 β 0 cos β cos β cos β cos β 0 = cos β cos β cos β 0. Ezeket helyettesítjük a képletbe, valamint vegyük figyelembe, hogy azimutális vetület lévén KA x-tengellyel bezárt szöge α. Ekkor tehát a perspektív vetületek általános képlete: x = p R(sinβ 0 cos β cos β 0 sin β cos λ) cos α = (D + R + f) D + R(cos β 0 cos β + sin β 0 sin β cos λ) y = p Rsinβ sin λ sin α = (D + R + f) D + R(cos β 0 cos β + sin β 0 sin β cos λ) Tehát a vetületi egyenletek: R(cos ϕ 0 sin ϕ sin ϕ 0 cos ϕ cos λ) x = (D + R + f) D + R(sin ϕ 0 sin ϕ + cos ϕ 0 cos ϕ cos λ) R cos ϕ sin λ) y = (D + R + f) D + R(sin ϕ 0 sin ϕ + cos ϕ 0 cos ϕ cos λ) (1.7) Ezen képletekből tehát ϕ 0 = π 2 helyettesítéssel a normális, ϕ 0 = 0 helyettesítéssel a transzverzális, f = 0 helyettesítéssel pedig az érintően elhelyezett síkra vonatkozó perspektív síkvetület egyenleteit kapjuk.
21 1. fejezet Térképészeti vetületek ábra. Azimutális vetületek vetületi egyenletei. Azimutális vetületek általános vetületi egyenletei Legyen K (λ 0, ϕ 0 ) standard koordinátájú pont a vetítési kezdőpont. A tetszőleges (λ, ϕ) koordinátájú pont. Jelölje P az északi pólust. Ekkor az AKP gömbháromszögre a gömbi koszinusz-, illetve szinusztételt alkalmazva: cos AK = sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ, sin α = cos ϕ 1 (sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ) 2. sin λ ahhonnan a síkbeli vetület polárkoordinátáit megkaphatjuk: r = f 1 (arccos(sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ)) ( cos ϕ ) 1 (sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ) α = arcsin 2 sin λ (1.8)
22 1. fejezet Térképészeti vetületek 18 Néhány nevezetes perspektív síkvetület A gnomikus vetület szerkesztését Thalesnek tulajdonítjuk. A vetület síkja érint a p pontban, a vetítési középpontja a gömb középpontja, azaz D = 0, tehát az benne van minden főkör síkjában, tehát minden főkör képe egyenes, ami azt jelenti, hogy a vetületen két pontot összekötve a két pontot összekötő főkört kapjuk, ezért jelentősége van a tengerészetben és a hosszútávú repülésben. A gnomikus vetület vetületi egyenletei 1.5. ábra. A gnomikus vetület. a (1.7) egyenletbe D = 0, f = 0 helyettesítéssel: x = R cos ϕ 0 sin ϕ sin ϕ 0 cos ϕ cos λ sin ϕ 0 sin ϕ + cos ϕ 0 cos ϕ cos λ, cos ϕ sin λ y = R sin ϕ 0 sin ϕ + cos ϕ 0 cos ϕ cos λ. Az ortografikus vetület esetén a Q vetítési középpont a végtelenben van, vagyis tulajdonképpen merőleges vetítés történik. Az ortografikus vetület egyenletetei a (1.8)
23 1. fejezet Térképészeti vetületek ábra. Az ortografikus vetület. egyenletbe f 1 = cos függvényt helyettesítve: r = sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ, ( cos ϕ ) 1 (sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ) α = arcsin 2. sin λ Azimuitális vetületekhez tartozó paraméterezés, a szögtartóság, területtartóság feltétele Legyen K a (λ 0, ϕ 0 ) standard koordinátájú pont a vetületi kezdőpont. Azimutális vetületnél tetszőleges p (r, α) poláris koordinátájú pont ősképét úgy kapjuk meg, hogy azon főkörön, mely merőleges K meridiánjára és átmegy K-n felmérünk egy bizonyos távolságot, mely csak r-től függ. Tehát a paraméterezést előállíthatjuk a következő
24 1. fejezet Térképészeti vetületek 20 alakban (f(r) jelzi ezen távolsághoz tartozó szög nagyságát): cos λ 0 0 sin λ cos α sin α cos ϕ 0 sin ϕ 0 sin α cos α 0 0 cos f(r) sin f(r) sin λ 0 0 cos λ 0 0 sin ϕ 0 cos ϕ sin f(r) cos f(r) cos λ 0 0 sin λ 0 sin λ 0 cos λ 0 0 cos f(r) sin f(r) 0 cos ϕ 0 sin ϕ sin ϕ 0 0 sin f(r) cos f(r) 0 sin ϕ 0 cos ϕ 0 sin λ 0 0 cos λ 0 cos λ 0 cos ϕ 0 ami tovább egyenlő: cos λ 0 0 sin λ sin λ 0 0 cos λ cos ϕ 0 sin ϕ 0 0 sin ϕ 0 cos ϕ 0 cos α sin α 0 sin α cos α Végeredményben tetszőleges azimutális vetülethez tartozó p paraméterezés, ha a síkon poláris koordináta-rendszert veszünk fel: p(r, α) = cos λ 0 sin f(r) sin α + cos f(r) cos ϕ 0 sin λ 0 sin ϕ 0 sin f(r) cos α sin λ 0 sin f(r) cos α cos ϕ 0 + sin ϕ 0 cos f(r) sin λ 0 sin f(r) sin α + cos λ 0 cos f(r) cos ϕ 0 sin ϕ 0 sin f(r) cos α cos λ 0 T Ahonnan a sík Descartes-féle koordinátáival, r = x 2 + y 2, α = arccos y x 2 +y 2. s(x, y) = cos λ 0 sin f( x 2 + y 2 ) sin α + cos f( x 2 + y 2 ) cos ϕ 0 sin λ 0 sin ϕ 0 sin f( x 2 + y 2 ) cos α sin λ 0 sin f( x 2 + y 2 ) cos α cos ϕ 0 + sin ϕ 0 cos f( x 2 + y 2 ) sin λ 0 sin f( x 2 + y 2 ) sin α + cos λ 0 cos f( x 2 + y 2 ) cos ϕ 0 sin ϕ 0 sin f( x 2 + y 2 ) cos α cos λ 0 T A szögtartóság, illetve területtartóság feltételének bizonyításához tegyük fel, hogy K a (0, 0, 1)koordinátájú pont. Tehát λ 0 = 0 és ϕ 0 = 0. Ekkor:
25 1. fejezet Térképészeti vetületek 21 p(r, α) = ( sin f(r) cos α, cos f(r), sin f(r) sin α), a deriváltak: P (r, α) def = p 1(r, α) p 2 (r, α) = cos f(r)f (r) cos α sin f(r)f (r) cos f(r)f (r) sin α sin f(r) sin α 0 sin f(r) cos α. Ekkor a p paraméterezés Ĝ első alapforma mátrixa az (r, α) pontban: Ĝ(r, α) = (f (r)) sin 2 f(r). (1.4) alapján a szögtartóság pontosan akkor teljesül, ha Ĝ(r, α) = (f (r)) sin 2 f(r) = λ(r) r 2, valamiyen λ : R R függvényre, ahonnan sin 2 f(r) = (f (r)) 2 r 2, tehát a szögtartóság szükséges és elégséges feltétele, hogy f kielégítse a következő differenciálegyenletet: f (r) = ± sin f(r). (1.9) r A területtartóság feltétele, hogy f kielégítse a következő differenciálegyenletet: f (r) sin f(r) = r. (1.10)
26 1. fejezet Térképészeti vetületek 22 A sztereografikus vetület Sztereografikus vetületről abban az esetben beszélünk, ha a perspektív vetület képtere a p pontban érinti a síkot, a vetítési középpont pedig az ellentétes oldalon a gömbön helyezkedik el ábra. A sztereografikus projekció. Ekkor a vetületi egyenletek, mivel D = R, f = 0: x = 2R cos ϕ 0 sin ϕ sin ϕ 0 cos ϕ cos λ 1 + sin ϕ 0 sin ϕ + cos ϕ 0 cos ϕ cos λ, cos ϕ sin λ y = 2R 1 + sin ϕ 0 sin ϕ + cos ϕ 0 cos ϕ cos λ, a fenti jelölésekkel. 4. Állítás. A sztereografikus projekció szögtartó. Bizonyítás. A korábbi jelöléseket használva ( r f(r) = 2 arctan, 2)
27 1. fejezet Térképészeti vetületek 23 f (r) = 1, 1 + r2 4 ahonnan a sin(t) = 2 tan( 1 2 t) 1 + tan 2 ( 1 2 t) képletetből sin f(r) r = 2 tan( 1 2 f(r)) r ( 1 + tan 2 ( 1 2 f(r))) = r ( r 1 + r2 4 ) = r2 4 = f (r). Néhány nem perspektív azimutális vetület Területtartó azimutális vetületet a következő módon szerkezhetünk. A vetítendő pontot a kezdőponttal összekötő húr hosszát felmérjük a megfelelő főkör képére K képéből. Ekkor a vetületi egyenletek a (1.8) egyenlet alapján f 1 (x) = 2 sin x 2 -ből: 1.8. ábra. Területtartó azimutális vetület.
28 1. fejezet Térképészeti vetületek 24 r = 2 sin (arccos(sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ)), 2 ( cos ϕ ) 1 (sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ) α = arcsin 2. sin λ 5. Állítás. Ez a vetület valóban területtartó. Bizonyítás. Esetünkben ( r f(r) = 2 arcsin, 2) f (r) = 1 1 ( ), r 2 2 ahonnan f (r) sin f(r) = = 1 1 ( r 2 1 ( r 1 ( ) 2 r ( ( r ) sin 2 arcsin 2 2)) ) ( r ) 2 1 = r. 2 Meridiánokon hossztartó azimutális vetületet úgy szerkezthetünk, hogy a vetítendő A pont képét úgy kapjuk, hogy ha a kezdőponttal összekötő főkör képére K képétől Rβ távolságot mérünk fel, ahol R a gömb sugara, O a gömb középpontja β az OA, OK egyenesek által bezárt szög. Ekkor a vetületi egyenletek a (1.8) egyenlet alapján f 1 (x) = Rx-ből: r = R arccos(sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ) ( cos ϕ ) 1 (sin ϕ sin ϕ 0 + cos ϕ cos ϕ 0 cos λ) α = arcsin 2 sin λ Hengervetületek Egy vetületet akkor nevezünk hengervetületnek, ha az Ω paramétertartomány téglalap és létezik egy P M pont, melyre
29 1. fejezet Térképészeti vetületek ábra. Meridiánokon hossztartó azimutális vetület. P -n átmenő főkörök képei párhuzamos egyenesek; OP egyenesre merőleges síkok által kimetszett körök képei párhuzamos egyenesek és merőlegesek az előzőkre. Ezen P pontot nevezzük a vetületi kezdőpontnak. Lambert-féle területtartó hengervetület Területtartó hengervetületet oly módon gyárthatunk, hogy a hengert úgy helyezzük a gömbhöz, hogy az alkotói a föld tengelyével párhuzamosak legyenek, majd a gömb pontjainak képét a pontból a föld tengelyére állított merőleges és a henger metszéspontja adja a ábra szerint. Ekkor ha a sík koordináta-rendszerét úgy vesszük fel, hogy az x tengely az egyenítő, az y tengely a kezdő meridián képei legyenek, a hengert a r( π, t) t ( π 2, π 2 ) görbe képénél vágjuk fel, a skálázás egysége a gömb R sugara, akkor a vetületi egyenletek: x = λ cos ϕ 0,
30 1. fejezet Térképészeti vetületek ábra. A területtartó hengervetület. ahol ϕ 0 ( π 2, π 2 ) adott. y = sin ϕ cos ϕ 0, 6. Állítás. A Lambert-féle hengervetület területtartó és a ϕ 0 koordinátájú paralelkörön hosszaránytartó. Bizonyítás. Először a területtartóságot bizonyítjuk. A vetületi egyenetekből: λ = x cos ϕ 0, ϕ = arcsin(y cos ϕ 0 ). Tehát a vetülethez tartozó paraméterezés: s(x, y) = (sin x x cos arcsin(y cos ϕ 0 ), y cos ϕ 0, cos cos arcsin(y cos ϕ 0 )) cos ϕ 0 cos ϕ 0 Ekkor: ( cos x cos ϕ s 1 (x, y) = 0 cos arcsin(y cos ϕ 0 ), 0, sin x ) cos ϕ 0 cos arcsin(y cos ϕ 0 ), cos ϕ 0 cos ϕ 0
31 1. fejezet Térképészeti vetületek 27 ( s 2 (x, y) = sin x cos ϕ 0 y cos 2 ϕ 0 1 (y cos ϕ0 ), cos ϕ 0, cos ) x cos ϕ 0 y cos 2 ϕ 0, 2 1 (y cos ϕ0 )r s 1, s 1 = cos2 arcsin(y cos ϕ 0 ) cos 2 ϕ 0, s 2, s 2 = cos 2 ϕ 0 1 (y cos ϕ 0 ) 2, s 1, s 2 = 0. Tehát: G(x, y) = cos 2 arcsin(y cos ϕ 0 ) cos 2 ϕ cos 2 ϕ 0 1 (y cos ϕ 0 ) 2, det G(x, y) = cos2 arcsin(y cos ϕ 0 ) 1 (y cos ϕ 0 ) 2 = 1 (y cos ϕ 0) 2 1 (y cos ϕ 0 ) 2 = 1. A hossztartóság bizonyításához γ := r u, ahol u(t) = (0, ϕ 0 ) + te 1 t [ π, π]. Ekkor u (t) = (0, 1)-ből a hossztartóság feltétele az 1.2 képlet szerint, hogy g 11 (u(t)) = λ λ R t [ π, π]-re. g 11 (t, ϕ 0 ) = 1 ϕ2 0 cos2 ϕ 0 cos 2 ϕ 0 = Hengervetület hossztartó meridiánokkal Ha azt akarjuk, hogy a meridiánok hossztartóak legyenek azonnal adódnak is a vetületi egyenletek. Ha úgy állítjuk fel a koordináta-rendszert a hengeren, mint az előző részben akkor a fenti jelölésekkel: x = λ cos ϕ 0, y = ϕ. 7. Állítás. Ez a vetület hossztartó a meridiánokon és a ϕ 0 paralelkörön. Bizonyítás. A vetülethez tartozó paraméterezés: r(x, y) = (sin x x cos y, sin y, cos cos y), cos ϕ 0 cos ϕ 0
32 1. fejezet Térképészeti vetületek 28 ( cos x cos ϕ r 1 (x, y) = 0 cos y, 0, sin x ) cos ϕ 0 cos y, cos ϕ 0 cos ϕ 0 r 2 (x, y) = ( sin x cos ϕ 0 sin y, cos y, cos r 1, r 1 = cos2 y cos 2 ϕ 0, r 2, r 2 = 1, ) x sin y, cos ϕ 0 r 1, r 2 = 0. Tehát: G(x, y) = cos 2 y cos 2 ϕ , ahonnan y = ϕ 0 helyettesítéssel láthatjuk, hogy ϕ 0 paralelkörön hossztartó a paraméterezés. A meridiánokat természetesen paraméterezhetjük az u : t r(u 0 +te 2 ) leképezéssel. Ekkor u 1 (t) = 0, u 2 (t) = 1, ahonnan a (1.2) egyenletbe behelyettesítve: ( cos 2 ) y cos (1 1) 1 = 0, ϕ 0 tehát a meridiánokon is beláttuk a hossztartóságot. A Cassini-féle vetület A Cassini-féle vetület ugyanolyan módon keletkezik, mint a feljebb taglalt, meridiánokon hossztartó hengervetület azzal a különbséggel, hogy először a földet elforgatjuk úgy, hogy a kezdő meridián menjen az egyenlítőbe. 8. Állítás. A Cassini-féle vetülethez tartozó vetületi egyenletek: a fenti jelölésekkel. x = arcsin (cos ϕ sin λ), y = arctan ( ) tan ϕ, cos λ
33 1. fejezet Térképészeti vetületek ábra. Cassini-vetület vetületi egyenletei. Bizonyítás. Jelölje P az északi pólust, standard koordinátájú pontot. Legyen A tetszőleges (λ, ϕ) standard koordinátájú pont, R a (λ, 0), Q (0, ϕ) standard koordinátájú pontok. Ekkor az ábrán látható jelölésekkel a P AQ illetve RAS derékszögű gömbháromszögekből: tan λ = tan ϕ tan ϕ sin( π = 2 λ) cos(λ), ( π ) sin ϕ = sin sin λ = cos ϕ sin λ, 2 ahonnan az állítás már következik A forgási ellipszoidról a-val, illetve b-vel jelöljük a fél nagy-, illetve kistengelyét. Az a b b hányadost lapultságnak nevezzük( jelölés: f). Az első excetricitást jelölje e = a 2 b 2 a 2.
34 1. fejezet Térképészeti vetületek 30 A második excentricitást jelölje e = a 2 b 2 b 2. Az ellipszoid standard paraméterezése alatt azon r : [ π, π] [ π 2, π 2 ] R3 leképezést értjük, ami a (λ, ϕ) ponthoz a (a cos λ cos φ, b sin φ, a sin λ cos φ) pontot rendeli, ahol ϕ = a sin φ b 2 cos 2 φ+a 2 sin 2 φ. Egy adott vetület vetületi egyenlete alatt azon f : [ π, π] [ π 2, π 2 ] R2 függvényt értjük, ami egy adott p M pont (ϕ, λ) standard koordinátáihoz az adott vetületbeli koordinátáit rendeli. Északi póluson a r( π 2, 0), déli póluson a r( π 2, 0) pontot értjük. Paralelkörök, illetve meridiánok alatt az első, illetve második változó szerinti paramétervonalakat értjük. Az ellipszoidra jellemző mennyiségek között triviáisan fennállnak a következő összefüggések: e 2 = e2, e 2 = e 2, (1 e 2 )(1+e 2 ) = 1, f = 1 1 e 1 e 2 1+e 2, e 2 = 2f f Állítás. Adott (ϕ, λ) standard koordinátájú pont második koordinátája az egyenlítő síkjával bezárt szöget adja meg. Bizonyítás. Mivel ez az ellipszoid az (a cos φ, b sin φ) ellipszoid y tengely körül megforgatott képe, elegendő az állítást adott meridián síkjában igazolni. koordinátájú pontban a normális Ekkor a (λ, ϕ) standard (b cos φ,a sin φ), ennek az x tengellyel bezárt szöge b 2 cos 2 φ,a 2 sin 2 φ a sin φ b 2 cos 2 φ, a 2 sin 2 φ = ϕ.
35 2. fejezet Az alkalmazásról A program C++-ban íródott, a megjelenítéshez az OpenGL könyvtárat használtam. Az input egy ECW vagy JP2 formátumú fájl, ezt jeleníti meg 3-dimenzióban, domborzattal, továbbá lehetőségünk van a billentyűzet és az egér segítségével közelíteni a Föld felszíne felé, forgatnunk a kamerát a Föld, illetve saját tengelye körül Működés Egy pixel útja Nevezzük a Föld standard koordinátázásának azon koordinátázást, ahol az y tengely a Föld forgástengelye ( az északi és a déli póus összekötő egyenes ), az z tengely az egyenlítő síkjának és a kezdőmeridián síkjának metszete, valamint az x tengely ezekre merőleges és x, y, z pozitív irányítású. Tegyük fel, hogy adott egy téglalap alakú térkép, azaz egy n m-es színértékű mátrix ( jelölés: BMP = {a i,j } i=n 1,j=m 1 i,j=0 ), az M alapfelület ( gömb, vagy forgási ellipszoid ), egy r : Ω M reguláris, injektív, legalább C 1 -osztályú paraméterezés, u 0 = (x 0, y 0 ) Ω, a 0,0 vetületbeli koordinátái, 31
36 2. fejezet Az alkalmazásról 32 d 1 állandó, a i,j és a i+1,j vetületbeli koordinátáik különbsége tetszőleges 0 i, j, i n 1, j m-re. d 2 állandó, a i,j és a i,j+1 vetületbeli koordinátáik különbsége tetszőleges 0 i, j, i n, j m 1-re. Legyen adott továbbá a, b > 0, valamint egy N forgási ellipszoid a és b nagy, illetve kis féltengelyekkel. Legyen [ π, π] [ π 2, π 2 ] H jel = { π h ij = ( π + i , π 2 j π } ) : i = , j = az ellipszoid standard koordinátázásának három szögmásodpercenkénti rácspontjai, SRT M = {s ij } n,m i,j=0 valósértékű mátrix. Ennek s ij eleme a H h ij standard koordinátájú pontban érintő síkra merőleges egyenes N-nel, illetve Földdel való metszetének különbségét adja meg ( elnevezés: magasság ). Jelölje továbbá t : Ω R 2 a vetületi egyenleteket. Ezen információk alapján szeretnénk adott (i, j)-re, 0 i, j, i n, j m, kiszámítani a ij standard koordinátáit. Először is ki kell számolnunk a vetületbeli koordinátáit, ezt a következő egyenletek alapján tehetjük meg: x = x 0 d 1 i, y = y 0 d 2 j. A vetületi egyenletekből megkaphatjuk az adott alapfelület standard koordinátázásában a pont koordinátáit. Ebből átszámoljuk az N felületbeli (λ, ϕ) standard koordinátáiba. Ekkor (λ, ϕ) előáll a hozzá legközelebb álló három H-beli pont konvex kombinációjaként, azaz (λ, ϕ) = α 1 h i1 j 1 + α 2 h i2 j 2 + α 3 h i3 j 3, ahol i α i = 1, α i > 0 i = Ekkor legyen s = α 1 s i1 j 1 + α 2 s i2 j 2 + α 3 s i3 j 3 a (λ, ϕ) standard koordinátájú pontban a közelítő magasság. Ekkor (a cos λ cos φ, b sin φ, a sin λ cos φ) + sn(λ, ϕ),
37 2. fejezet Az alkalmazásról 33 képletbe helyettesítve, ahol N(λ, ϕ) az (b cos φ cos λ, a sin φ, b cos φ sin λ) vektor normáltja, az adott pontbeli egységnormális, valamint ϕ = tényleges, standard koordinátáit. a sin φ, kaphatjuk meg a pont b 2 cos 2 φ+a 2 sin 2 φ Mozgás A kamerával közelíthetünk a földgömb közepéhez, valamint forgathatjuk a kamerát a földgömb, valamint saját tengelye körül is. Ezen forgatások gyors és hatékony kivitelezése érdekében kvaterniókat használunk. 7. Definíció. Kvaterniók ( jelölés: H ) alaphalmaza H = { (a, b, c, d) R 4}. Ezen értelmezünk három műveletet a skalárral való szorzást, az összeadást és a kvaterniószorzás. A skalárral való szorzás, valamint az összeadás R 4 szokásos skalárral való szorzása, illetve összeadása, azaz (a 1, b 1, c 1, d 1 ) + (a 2, b 2, c 2, d 2 ) = (a 1 + a 2, b 1 + b 2, c 1 + c 2, d 1 + d 2 ), λ(a, b, c, d) = (λa, λb, λc, λd). A kvaterniószorzás definiálásához jelöljük az R 4 standard bázisát 1 jel = e 1, i jel = e 2, j jel = e 3, k jel = e 4 -val. Ekkor tetszőleges (a, b, c, d, e) R 4 elem a1 + bi + cj + dk a, b, c, d R alakban áll elő. 1 lesz az egységelem a kvaterniószorzásra nézve, ezért az elemeket a + bi + cj + dk alakban fogjuk írni. Ezután a műveletet először a bázis elemeken definiáljuk a következőképpen: i 2 = j 2 = k 2 = ijk = 1, majd ezen összefüggéseket, valamint az asszociativitást és disztributivitást használva definiálhatjuk tetszőleges két elem szorzatát.
38 2. fejezet Az alkalmazásról 34 Ezek alapján p, q H, p = a 1 + b 1 i + c 1 j + d 1 k, q = a 2 + b 2 i + c 2 j + d 2 k, a i, b i, c i, d i R i = 1, 2, két tetszőleges elemre pq = a 1 a 2 b 1 b 2 c 1 c 2 d 1 d 2 + (a 1 b 2 + b 1 a 2 + c 1 d 2 d 1 c 2 )i+ + (a 1 c 2 b 1 d 2 + c 1 a 2 + d 1 b 2 )j + (a 1 d 2 + b 1 c 2 c 1 b 2 + d 1 a 2 )k. 10. Állítás. A kvaterniók algebrát alkotnak R felett. Bizonyítás. A vektortér tulajdonságok R 4 R feletti vektortér mivoltából következnek. A kvaterniószorzat disztributivitása az összeadás műveletre nézve definíciójából következik. Legyen a, b R 4, p, q H, p = a 1 +b 1 i+c 1 j+d 1 k, q = a 2 +b 2 i+c 2 j+d 2 k, a i, b i, c i, d i R i = 1, 2, ekkor (ap)(bq) = (aa 1 + ab 1 i + ac 1 j + ad 1 k)(ba 2 + bb 2 i + bc 2 j + bd 2 k) = aa 1 ba 2 ab 1 bb 2 ac 1 bc 2 ad 1 bd 2 + (aa 1 bb 2 + ab 1 ba 2 + ac 1 bd 2 ad 1 bc 2 )i+ + (aa 1 bc 2 ab 1 bd 2 + ac 1 ba 2 + ad 1 bb 2 )j + (aa 1 bd 2 + ab 1 bc 2 ac 1 bb 2 + ad 1 ba 2 )k = (ab)(a 1 a 2 b 1 b 2 c 1 c 2 d 1 d 2 + (a 1 b 2 + b 1 a 2 + c 1 d 2 d 1 c 2 )i+ + (a 1 c 2 b 1 d 2 + c 1 a 2 + d 1 b 2 )j + (a 1 d 2 + b 1 c 2 c 1 b 2 + d 1 a 2 )k) = (ab)(pq) Ezzel az összes algebratulajdonságot beláttuk. 8. Definíció. Egy q = a + bi + cj + dk H imaginárius része: Iq = bi + cj + dk H. 9. Definíció. Egy q = a + bi + cj + dk H valós része: Rq = a R. 10. Definíció. Egy q = a + bi + cj + dk H hossza q = a 2 + b 2 + c 2 + d 2 R. Jelölés: Legyen a R, v = (v 1, v 2, v 3 ) R 3, ekkor a + v alatt a + v 1 i + v 2 j + v 3 k H-t értjük. 11. Definíció. Egy q = a + v kvaternió konjugáltja q = a v. 11. Állítás. p, q H, melyekre Rp = 0, Rq = 0. Ekkor p = 0 + u, q = 0 + v u, v R3, valamint pq = u, v + u v, ahol a vektoriális,.,. a skaláris szorzást jelöli.
39 2. fejezet Az alkalmazásról 35 Bizonyítás. pq = u 1 v 1 u 2 v 2 u 3 v 3 + (u 2 v 3 u 3 v 2 )i + (u 3 v 1 u 1 v 3 )j + (u 1 v 2 u 2 v 1 )k = u, v + u v Tulajdonságok: (q) = q, p + q = p + q, λq = λq, λ R-ra, pq = q p q 1 = q q. 12. Definíció. q kvaternióval való konjugálás, azon C q : H H leképezés, melyre C q (p) = qpq 1. Tulajdonságok: C 1 az identitás, mivel C 1 (v) = 1 v 1 = v. pq-val való konjugálás a C p C q leképezés, mivel C pq (v) = (pq)v(pq) 1 = (pq)v(q 1 p 1 ) = p(qvq 1 )p 1 = C p C q (v). C q inverzleképezése C q 1, mivel C q C q 1 = C qq 1 = C Állítás. Legyen q = cos ( α 2 ) + u sin ( α 2 ), ahol a R, u R 3 egységvektor, p = 0 + v, valamilyen v R 3 -re. Ekkor C q (p) = 0 + v, ahol v v u irányvektorú egyenes körül pozitív irányba α szöggel elforgatott képe.
40 2. fejezet Az alkalmazásról 36 Bizonyítás. C q (p) = C q (v) = ( ( α ) ( α )) ( ( α ) ( α )) cos + u sin v cos u sin = v cos 2 α 2 + (uv vu) sin α 2 cos α 2 uvu sin2 α 2 = v cos 2 α 2 + 2(u v) sin α 2 cos α 2 (v u, u 2u u, v ) sin2 α 2 = v(cos 2 α 2 α sin2 2 ) + (u v)2(sin α 2 cos α 2 ) (u u, v ) α sin2 2 = v cos α + (u v) sin α (u u, v )(1 cos α) = (v u u, v ) cos α + (u v) sin α u u, v = v o cos α + (u v) sin α v p, ahol v o és v p a v vektor merőleges, illetve párhuzamos komponense az u vektorra nézve. Ez pedig pont az v vektor u irányvektorú egyenes körüli pozitív irányba α szöggel elforgatottja, ahogy az a 2.1. ábráról leolvasható ábra. Rodrigues-formula adott v R 3 vektor egyenes körüli elforgatottjára
 megjelenítése. 2.2. ábra.")
41 1. fejezet Térképészeti vetületek Monitorképek Ebben a részben bemutatunk néhánhy képet a program működéséről. Igyekeztünk olyan pillanatképeket készíteni, melyben jól megfigyelhető a domborzati viszonyok helyes ( a térképpel összhangban lévő ) megjelenítése ábra. Kárpátok a Második katonai felmérésen ( ).

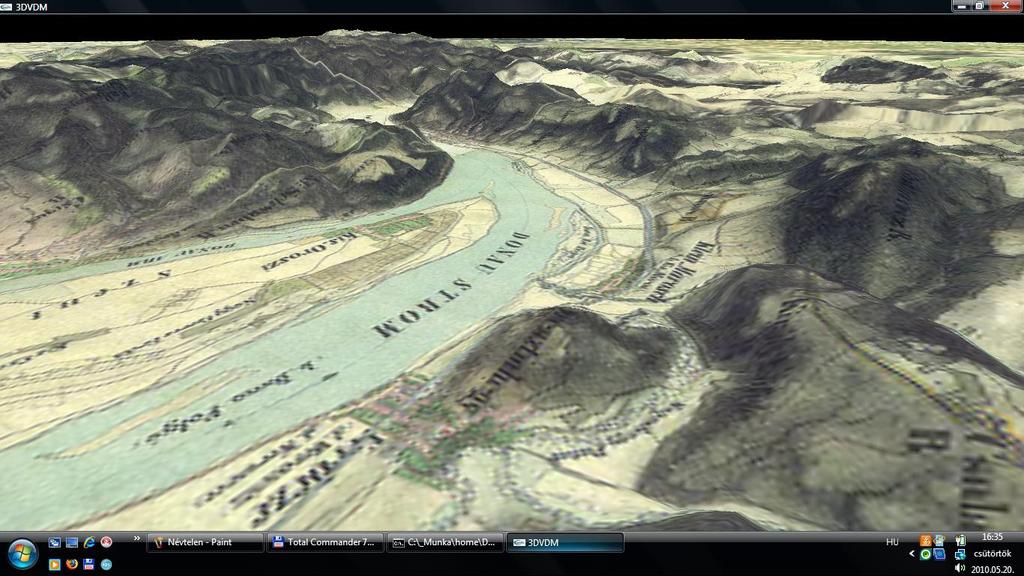
42 1. fejezet Térképészeti vetületek ábra. Dunakanyar a Második katonai felmérésen ( ) ábra. Dunakanyar a Második katonai felmérésen ( ).


43 1. fejezet Térképészeti vetületek ábra. Dunakanyar a Harmadik katonai felmérésen ( ) ábra. Dunakanyar a Második katonai felmérésen ( ).


44 1. fejezet Térképészeti vetületek ábra. Dunakanyar a Második katonai felmérésen ( ) ábra. Budapest és környéke a Második katonai felmérésen( ).

. 2.10. ábra.")
45 1. fejezet Térképészeti vetületek ábra. Balaton a Harmadik katonai felmérésen( ) ábra. Balaton a Második katonai felmérésen( ).
46 Irodalomjegyzék [1] Varga József, Vetülettan. Műegyetemi kiadó, [2] and spatial rotation [3] [4] projection [5] cylindrical equal-area projection [6] projection [7] conformal conic projection [8] projection [9] 1/Documentation/ [10] [11] 42
3. Vetülettan (3/3-5.) Unger szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi Tanszék
 Unger szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi Tanszék") Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/3-5.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/3-5.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
17. előadás: Vektorok a térben
 17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága
 Földrajzi koordináták Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága Topo-Karto-2 1 Földrajzi koordináták pólus egyenlítő
Földrajzi koordináták Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága Topo-Karto-2 1 Földrajzi koordináták pólus egyenlítő
7. előadás: Lineármodulus a vetületi főirányokban és a területi modulus az azimutális vetületeken
 7 előadás: Lineármodulus a vetületi főirányokban és a területi modulus az azimutális vetületeken Mivel az azimutális vetületeken normális elhelyezésben a meridiánok és a paralelkörök, más elhelyezésben
7 előadás: Lineármodulus a vetületi főirányokban és a területi modulus az azimutális vetületeken Mivel az azimutális vetületeken normális elhelyezésben a meridiánok és a paralelkörök, más elhelyezésben
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
3. Vetülettan (3/6., 8., 10.) Unger János. @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan
 Unger János. @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan") Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/6., 8., 10.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
Kartográfia (GBN309E) Térképészet (GBN317E) előadás 3. Vetülettan (3/6., 8., 10.) Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan SZTE Éghajlattani és Tájföldrajzi
5. előadás. Skaláris szorzás
 5. előadás Skaláris szorzás Bevezetés Két vektor hajlásszöge: a vektorokkal párhuzamos és egyirányú, egy pontból induló félegyenesek konvex szöge. φ Bevezetés Definíció: Két vektor skaláris szorzata abszolút
5. előadás Skaláris szorzás Bevezetés Két vektor hajlásszöge: a vektorokkal párhuzamos és egyirányú, egy pontból induló félegyenesek konvex szöge. φ Bevezetés Definíció: Két vektor skaláris szorzata abszolút
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások
 Megoldások") Megoldások 1. Határozd meg a szakasz hosszát, ha a végpontok koordinátái: A ( 1; ) és B (5; )! A szakasz hosszához számítsuk ki a két pont távolságát: d AB = AB = (5 ( 1)) + ( ) = 6 + 1 = 7 6,08.. Határozd
Megoldások 1. Határozd meg a szakasz hosszát, ha a végpontok koordinátái: A ( 1; ) és B (5; )! A szakasz hosszához számítsuk ki a két pont távolságát: d AB = AB = (5 ( 1)) + ( ) = 6 + 1 = 7 6,08.. Határozd
Komplex számok. (a, b) + (c, d) := (a + c, b + d)
 + (c, d) := (a + c, b + d)") Komplex számok Definíció. Komplex számoknak nevezzük a valós számokból képzett rendezett (a, b) számpárok halmazát, ha közöttük az összeadást és a szorzást következőképpen értelmezzük: (a, b) + (c, d)
Komplex számok Definíció. Komplex számoknak nevezzük a valós számokból képzett rendezett (a, b) számpárok halmazát, ha közöttük az összeadást és a szorzást következőképpen értelmezzük: (a, b) + (c, d)
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások
 Megoldások") Megoldások 1. Tekintsük az alábbi szabályos hatszögben a következő vektorokat: a = AB és b = AF. Add meg az FO, DC, AO, AC, BE, FB, CE, DF vektorok koordinátáit az (a ; b ) koordinátarendszerben! Alkalmazzuk
Megoldások 1. Tekintsük az alábbi szabályos hatszögben a következő vektorokat: a = AB és b = AF. Add meg az FO, DC, AO, AC, BE, FB, CE, DF vektorok koordinátáit az (a ; b ) koordinátarendszerben! Alkalmazzuk
10. Koordinátageometria
 I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Diszkrét matematika II., 8. előadás. Vektorterek
 1 Diszkrét matematika II., 8. előadás Vektorterek Dr. Takách Géza NyME FMK Informatikai Intézet takach@inf.nyme.hu http://inf.nyme.hu/ takach/ 2007.??? Vektorterek Legyen T egy test (pl. R, Q, F p ). Definíció.
1 Diszkrét matematika II., 8. előadás Vektorterek Dr. Takách Géza NyME FMK Informatikai Intézet takach@inf.nyme.hu http://inf.nyme.hu/ takach/ 2007.??? Vektorterek Legyen T egy test (pl. R, Q, F p ). Definíció.
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások
 Megoldások") Megoldások 1. Írd fel a K (0; 2) középpontú 7 sugarú kör egyenletét! A keresett kör egyenletét felírhatjuk a képletbe való behelyettesítéssel: x 2 + (y + 2) 2 = 49. 2. Írd fel annak a körnek az egyenletét,
Megoldások 1. Írd fel a K (0; 2) középpontú 7 sugarú kör egyenletét! A keresett kör egyenletét felírhatjuk a képletbe való behelyettesítéssel: x 2 + (y + 2) 2 = 49. 2. Írd fel annak a körnek az egyenletét,
sin x = cos x =? sin x = dx =? dx = cos x =? g) Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!
 Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!") Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához
 Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához Dr. Nagy Gábor, Geometria Tanszék 2010. szeptember 16. Görbék paraméterezése 1. feladat. (A) Bizonyítsuk be a vektoriális szorzatra vonatkozó
Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához Dr. Nagy Gábor, Geometria Tanszék 2010. szeptember 16. Görbék paraméterezése 1. feladat. (A) Bizonyítsuk be a vektoriális szorzatra vonatkozó
Felügyelt önálló tanulás - Analízis III.
 Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
Koordináta-geometria feladatok (emelt szint)
") Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Koordináta-rendszerek
 Koordináta-rendszerek Térkép: a Föld felszín (részletének) ábrázolása síkban Hogyan határozható meg egy pont helyzete egy síkon? Derékszögű koordináta-rendszer: a síkban két, egymást merőlegesen metsző
Koordináta-rendszerek Térkép: a Föld felszín (részletének) ábrázolása síkban Hogyan határozható meg egy pont helyzete egy síkon? Derékszögű koordináta-rendszer: a síkban két, egymást merőlegesen metsző
Matematika I. Vektorok, egyenesek, síkok
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika I Vektorok, egyenesek, síkok a) Hogyan számítjuk ki az a = (a 1, a 2, a 3 ) és b = (b 1, b 2, b 3 ) vektorok szögét? a) Hogyan számítjuk
Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika I Vektorok, egyenesek, síkok a) Hogyan számítjuk ki az a = (a 1, a 2, a 3 ) és b = (b 1, b 2, b 3 ) vektorok szögét? a) Hogyan számítjuk
Exponenciális és logaritmusos kifejezések, egyenletek
 Eponenciális és logaritmusos kifejezések, egyenletek. Hatványozási azonosságok. Számítsd ki a következő hatványok pontos értékét! a) 8 b) 4 c) d) 7 e) f) 9 0, g) 0, 9 h) 6 0, 7,, i) 8 j) 6 k) 4 l) 49,.
Eponenciális és logaritmusos kifejezések, egyenletek. Hatványozási azonosságok. Számítsd ki a következő hatványok pontos értékét! a) 8 b) 4 c) d) 7 e) f) 9 0, g) 0, 9 h) 6 0, 7,, i) 8 j) 6 k) 4 l) 49,.
KOVÁCS BÉLA, MATEMATIKA II.
 KOVÁCS BÉLA MATEmATIkA II 6 VI TÉRGÖRbÉk 1 Alapvető ÖSSZEFÜGGÉSEk A térgörbe (1) alakú egyenletével írható le Ez a vektoregyenlet egyenértékű az (2) skaláris egyenletrendszerrel A térgörbe három nevezetes
KOVÁCS BÉLA MATEmATIkA II 6 VI TÉRGÖRbÉk 1 Alapvető ÖSSZEFÜGGÉSEk A térgörbe (1) alakú egyenletével írható le Ez a vektoregyenlet egyenértékű az (2) skaláris egyenletrendszerrel A térgörbe három nevezetes
Matematika II. 1 sin xdx =, 1 cos xdx =, 1 + x 2 dx =
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
LINEÁRIS ALGEBRA. matematika alapszak. Euklideszi terek. SZTE Bolyai Intézet, őszi félév. Euklideszi terek LINEÁRIS ALGEBRA 1 / 40
 LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
Vektorok és koordinátageometria
 Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Megoldások. Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma)
") Megoldások 1. Határozd meg az a és b vektor skaláris szorzatát, ha a = 5, b = 4 és a közbezárt szög φ = 55! Alkalmazzuk a megfelelő képletet: a b = a b cos φ = 5 4 cos 55 11,47. 2. Határozd meg a következő
Megoldások 1. Határozd meg az a és b vektor skaláris szorzatát, ha a = 5, b = 4 és a közbezárt szög φ = 55! Alkalmazzuk a megfelelő képletet: a b = a b cos φ = 5 4 cos 55 11,47. 2. Határozd meg a következő
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R n vektortér Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. R n vektortér/1 Vektorok Rendezett szám n-esek: a = (a 1, a 2,, a n ) sorvektor a1 a = a2 oszlopvektor... a n a 1, a 2,,
Az R n vektortér Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. R n vektortér/1 Vektorok Rendezett szám n-esek: a = (a 1, a 2,, a n ) sorvektor a1 a = a2 oszlopvektor... a n a 1, a 2,,
Budapesti Műszaki Főiskola, Neumann János Informatikai Kar. Vektorok. Fodor János
 Budapesti Műszaki Főiskola, Neumann János Informatikai Kar Lineáris algebra 1. témakör Vektorok Fodor János Copyright c Fodor@bmf.hu Last Revision Date: 2006. szeptember 11. Version 1.1 Table of Contents
Budapesti Műszaki Főiskola, Neumann János Informatikai Kar Lineáris algebra 1. témakör Vektorok Fodor János Copyright c Fodor@bmf.hu Last Revision Date: 2006. szeptember 11. Version 1.1 Table of Contents
Összeállította: dr. Leitold Adrien egyetemi docens
 Skaláris szorzat az R n vektortérben Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok skaláris szorzata Két R n -beli vektor skaláris szorzata: Legyen a = (a 1,a 2,,a n ) és b
Skaláris szorzat az R n vektortérben Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok skaláris szorzata Két R n -beli vektor skaláris szorzata: Legyen a = (a 1,a 2,,a n ) és b
ANALÍZIS II. Példatár
 ANALÍZIS II. Példatár Többszörös integrálok 3. április 8. . fejezet Feladatok 3 4.. Kett s integrálok Számítsa ki az alábbi integrálokat:...3. π 4 sinx.. (x + y) dx dy (x + y) dy dx.4. 5 3 y (5x y y 3
ANALÍZIS II. Példatár Többszörös integrálok 3. április 8. . fejezet Feladatok 3 4.. Kett s integrálok Számítsa ki az alábbi integrálokat:...3. π 4 sinx.. (x + y) dx dy (x + y) dy dx.4. 5 3 y (5x y y 3
1. Generátorrendszer. Házi feladat (fizikából tudjuk) Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak
 Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak") 1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
1. feladatsor: Vektorfüggvények deriválása (megoldás)
") Matematika A gyakorlat Energetika és Mechatronika BSc szakok 016/17 ősz 1. feladatsor: Vektorfüggvények deriválása megoldás) 1. Tekintsük azt az L : R R lineáris leképezést ami az 1 0) vektort az 1 0 )
Matematika A gyakorlat Energetika és Mechatronika BSc szakok 016/17 ősz 1. feladatsor: Vektorfüggvények deriválása megoldás) 1. Tekintsük azt az L : R R lineáris leképezést ami az 1 0) vektort az 1 0 )
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 30 Egy
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 30 Egy
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
9. előadás: A gömb valós hengervetületei
 A valós hengervetületek általános tulajdonságai A hengervetületek (cilindrikus vetületek) jellemzője hogy normális elhelyezésben az egyenlítő és a paralelkörök képei párhuzamos egyenesek. A valós hengervetületnek
A valós hengervetületek általános tulajdonságai A hengervetületek (cilindrikus vetületek) jellemzője hogy normális elhelyezésben az egyenlítő és a paralelkörök képei párhuzamos egyenesek. A valós hengervetületnek
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT Koordináta-geometria
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT Koordináta-geometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT Koordináta-geometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett
Az egyenlőtlenség mindkét oldalát szorozzuk meg 4 16-al:
 Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
Matematika szigorlat június 17. Neptun kód:
 Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT. Koordináta-geometria
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT 1) Adott két pont: A 4; 1 felezőpontjának koordinátáit! AB felezőpontja legyen F. Koordináta-geometria és B 3 1; Írja fel az AB szakasz 1 3 4
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT 1) Adott két pont: A 4; 1 felezőpontjának koordinátáit! AB felezőpontja legyen F. Koordináta-geometria és B 3 1; Írja fel az AB szakasz 1 3 4
9. Írjuk fel annak a síknak az egyenletét, amely átmegy az M 0(1, 2, 3) ponton és. egyenessel;
 ponton és. egyenessel;") Síkok és egyenesek FELADATLAP Írjuk fel annak az egyenesnek az egyenletét, amely átmegy az M 0(,, ) ponton és a) az M(,, 0) ponton; b) párhuzamos a d(,, 5) vektorral; c) merőleges a x y + z 0 = 0 síkra;
Síkok és egyenesek FELADATLAP Írjuk fel annak az egyenesnek az egyenletét, amely átmegy az M 0(,, ) ponton és a) az M(,, 0) ponton; b) párhuzamos a d(,, 5) vektorral; c) merőleges a x y + z 0 = 0 síkra;
Haladó lineáris algebra
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
Lengyelné Dr. Szilágyi Szilvia április 7.
 ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
A sztereografikus vetület és magyarországi alkalmazása
 A sztereografikus vetület és magyarországi alkalmazása Perspektív síkvetületek A perspektív síkvetületek a gömb alapfelületet síkra képezik le középpontos geometriai vetítéssel. A vetítés Q középpontja
A sztereografikus vetület és magyarországi alkalmazása Perspektív síkvetületek A perspektív síkvetületek a gömb alapfelületet síkra képezik le középpontos geometriai vetítéssel. A vetítés Q középpontja
II. A TÉRKÉPVETÜLETEK RENDSZERES LEÍRÁSA 83
 T A R T A L O M J E G Y Z É K I. A TÉRKÉPVETÜLETEKRŐL ÁLTALÁBAN 13 VETÜLETTANI ALAPFOGALMAK 15 A térkép mint matematikai leképezés eredménye 15 Az alapfelület paraméterezése földrajzi koordinátákkal 18
T A R T A L O M J E G Y Z É K I. A TÉRKÉPVETÜLETEKRŐL ÁLTALÁBAN 13 VETÜLETTANI ALAPFOGALMAK 15 A térkép mint matematikai leképezés eredménye 15 Az alapfelület paraméterezése földrajzi koordinátákkal 18
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Átszámítások különböző alapfelületek koordinátái között
 Átszámítások különböző alapfelületek koordinátái között A különböző időpontokban, különböző körülmények között rögzített pontok földi koordinátái különböző alapfelületekre (ellipszoidokra geodéziai dátumokra)
Átszámítások különböző alapfelületek koordinátái között A különböző időpontokban, különböző körülmények között rögzített pontok földi koordinátái különböző alapfelületekre (ellipszoidokra geodéziai dátumokra)
Az f ( xy, ) függvény y változó szerinti primitív függvénye G( x, f xydy= Gxy + C. Kétváltozós függvény integrálszámítása. Primitívfüggvény.
 függvény y változó szerinti primitív függvénye G( x, f xydy= Gxy + C. Kétváltozós függvény integrálszámítása. Primitívfüggvény.") Tartalomjegyzék Kétváltozós függvény integrálszámítása... Primitívfüggvény... Kettősintegrál... A kettősintegrál téglalap tartományon... A kettősintegrál létezésének szükséges feltétele... 3 Illusztráció...
Tartalomjegyzék Kétváltozós függvény integrálszámítása... Primitívfüggvény... Kettősintegrál... A kettősintegrál téglalap tartományon... A kettősintegrál létezésének szükséges feltétele... 3 Illusztráció...
Vektorok. Wettl Ferenc október 20. Wettl Ferenc Vektorok október / 36
 Vektorok Wettl Ferenc 2014. október 20. Wettl Ferenc Vektorok 2014. október 20. 1 / 36 Tartalom 1 Vektorok a 2- és 3-dimenziós térben 2 Távolság, szög, orientáció 3 Vektorok koordinátás alakban 4 Összefoglalás
Vektorok Wettl Ferenc 2014. október 20. Wettl Ferenc Vektorok 2014. október 20. 1 / 36 Tartalom 1 Vektorok a 2- és 3-dimenziós térben 2 Távolság, szög, orientáció 3 Vektorok koordinátás alakban 4 Összefoglalás
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Vektorgeometria (2) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Vektorgeometria (2) First Prev Next Last Go Back Full Screen Close Quit 1. Tekintsünk a térben egy P (p 1, p 2, p 3 ) pontot és egy v = (v 1, v 2, v 3 ) = 0 vektort. Ekkor pontosan egy egyenes létezik,
Vektorgeometria (2) First Prev Next Last Go Back Full Screen Close Quit 1. Tekintsünk a térben egy P (p 1, p 2, p 3 ) pontot és egy v = (v 1, v 2, v 3 ) = 0 vektort. Ekkor pontosan egy egyenes létezik,
Síkgeometria 12. évfolyam. Szögek, szögpárok és fajtáik
 Szögek, szögpárok és fajtáik Szögfajták: Jelölés: Mindkét esetben: α + β = 180 Pótszögek: Olyan szögek, amelyeknek összege 90. Oldalak szerint csoportosítva A háromszögek Általános háromszög: Minden oldala
Szögek, szögpárok és fajtáik Szögfajták: Jelölés: Mindkét esetben: α + β = 180 Pótszögek: Olyan szögek, amelyeknek összege 90. Oldalak szerint csoportosítva A háromszögek Általános háromszög: Minden oldala
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag. Mátrix rangja
 VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
A tér lineáris leképezései síkra
 A tér lineáris leképezései síkra Az ábrázoló geometria célja: A háromdimenziós térben elhelyezkedő alakzatok helyzeti és metrikus viszonyainak egyértelmű és egyértelműen rekonstruálható módon történő ábrázolása
A tér lineáris leképezései síkra Az ábrázoló geometria célja: A háromdimenziós térben elhelyezkedő alakzatok helyzeti és metrikus viszonyainak egyértelmű és egyértelműen rekonstruálható módon történő ábrázolása
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Jelölések. GBN304G Alkalmazott kartográfia II. gyakorlat Térképi vetületekkel kapcsolatos feladatok. Unger János. x;y) )?
 )?") GBN304G Alkalmazott kartográfia II. gyakorlat Térképi vetületekkel kapcsolatos feladatok Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan Jelölések R/m = alapfelületi
GBN304G Alkalmazott kartográfia II. gyakorlat Térképi vetületekkel kapcsolatos feladatok Unger János unger@geo.u @geo.u-szeged.hu www.sci.u-szeged.hu/eghajlattan szeged.hu/eghajlattan Jelölések R/m = alapfelületi
Vektorterek. =a gyakorlatokon megoldásra ajánlott
 Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Felületek differenciálgeometriai vizsgálata
 Felületek differenciálgeometriai vizsgálata Felületek differenciálgeometriai értelemben Felület: Olyan alakzat, amely előállítható az (u,v) sík egy összefüggő tartományán értelmezett r(u,v) kétparaméteres
Felületek differenciálgeometriai vizsgálata Felületek differenciálgeometriai értelemben Felület: Olyan alakzat, amely előállítható az (u,v) sík egy összefüggő tartományán értelmezett r(u,v) kétparaméteres
5. házi feladat. AB, CD kitér élpárra történ tükrözések: Az ered transzformáció: mivel az origó xpont, így nincs szükség homogénkoordinátás
 5. házi feladat 1.feladat A csúcsok: A = (0, 1, 1) T, B = (0, 1, 1) T, C = (1, 0, 0) T, D = ( 1, 0, 0) T AB, CD kitér élpárra történ tükrözések: 1 0 0 T AB = 0 1 0, elotlási rész:(i T AB )A = (0, 0, )
5. házi feladat 1.feladat A csúcsok: A = (0, 1, 1) T, B = (0, 1, 1) T, C = (1, 0, 0) T, D = ( 1, 0, 0) T AB, CD kitér élpárra történ tükrözések: 1 0 0 T AB = 0 1 0, elotlási rész:(i T AB )A = (0, 0, )
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉPSZINT Koordináta-geometria
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉPSZINT Koordináta-geometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉPSZINT Koordináta-geometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA, MATEmATIkA I 14 XIV NEVEZETES GÖRbÉk 1 AZ EGYEnES EGYEnLETE A és pontokon átmenő egyenes egyenlete: (1), Az hányados neve iránytényező (iránytangens, meredekség) A ponton átmenő, m iránytangensű
KOVÁCS BÉLA, MATEmATIkA I 14 XIV NEVEZETES GÖRbÉk 1 AZ EGYEnES EGYEnLETE A és pontokon átmenő egyenes egyenlete: (1), Az hányados neve iránytényező (iránytangens, meredekség) A ponton átmenő, m iránytangensű
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
1. Bázistranszformáció
 1. Bázistranszformáció Transzformáció mátrixa új bázisban A bázistranszformáció képlete (Freud, 5.8.1. Tétel) Legyenek b és d bázisok V -ben, ] v V és A Hom(V). Jelölje S = [[d 1 ] b,...,[d n ] b T n n
1. Bázistranszformáció Transzformáció mátrixa új bázisban A bázistranszformáció képlete (Freud, 5.8.1. Tétel) Legyenek b és d bázisok V -ben, ] v V és A Hom(V). Jelölje S = [[d 1 ] b,...,[d n ] b T n n
Többváltozós, valós értékű függvények
 TÖ Többváltozós, valós értékű függvények TÖ Definíció: többváltozós függvények Azokat a függvényeket, melyeknek az értelmezési tartománya R n egy részhalmaza, n változós függvényeknek nevezzük. TÖ Példák:.
TÖ Többváltozós, valós értékű függvények TÖ Definíció: többváltozós függvények Azokat a függvényeket, melyeknek az értelmezési tartománya R n egy részhalmaza, n változós függvényeknek nevezzük. TÖ Példák:.
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Paraméter
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Paraméter A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett feladatrészek
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Paraméter A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett feladatrészek
A loxodrómáról. Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra.
 1 A loxodrómáról Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra. 1. ábra forrása: [ 1 ] Ezen a térképen a szélességi
1 A loxodrómáról Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra. 1. ábra forrása: [ 1 ] Ezen a térképen a szélességi
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA MATEmATIkA I 8 VIII VEkTOROk 1 VEkTOR Vektoron irányított szakaszt értünk Jelölése: stb Vektorok hossza A vektor abszolút értéke az irányított szakasz hossza Ha a vektor hossza egységnyi akkor
KOVÁCS BÉLA MATEmATIkA I 8 VIII VEkTOROk 1 VEkTOR Vektoron irányított szakaszt értünk Jelölése: stb Vektorok hossza A vektor abszolút értéke az irányított szakasz hossza Ha a vektor hossza egységnyi akkor
2. gyakorlat. A polárkoordináta-rendszer
 . gyakorlat A polárkoordináta-rendszer Az 1. gyakorlaton megismerkedtünk a descartesi koordináta-rendszerrel. Síkvektorokat gyakran kényelmes ún. polárkoordinátákkal megadni: az r hosszúsággal és a φ irányszöggel
. gyakorlat A polárkoordináta-rendszer Az 1. gyakorlaton megismerkedtünk a descartesi koordináta-rendszerrel. Síkvektorokat gyakran kényelmes ún. polárkoordinátákkal megadni: az r hosszúsággal és a φ irányszöggel
A bifiláris felfüggesztésű rúd mozgásáról
 1 A bifiláris felfüggesztésű rúd mozgásáról A végein fonállal felfüggesztett egyenes rúd részleges erőtani vizsgálatát mutattuk be egy korábbi dolgozatunkban, melynek címe: Forgatónyomaték mérése - I.
1 A bifiláris felfüggesztésű rúd mozgásáról A végein fonállal felfüggesztett egyenes rúd részleges erőtani vizsgálatát mutattuk be egy korábbi dolgozatunkban, melynek címe: Forgatónyomaték mérése - I.
Kvadratikus alakok és euklideszi terek (előadásvázlat, október 5.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Kvadratikus alakok és euklideszi terek (előadásvázlat, 0. október 5.) Maróti Miklós, Kátai-Urbán Kamilla Az előadáshoz ajánlott jegyzet: Szabó László: Bevezetés a lineáris algebrába, Polygon Kiadó, Szeged,
Kvadratikus alakok és euklideszi terek (előadásvázlat, 0. október 5.) Maróti Miklós, Kátai-Urbán Kamilla Az előadáshoz ajánlott jegyzet: Szabó László: Bevezetés a lineáris algebrába, Polygon Kiadó, Szeged,
1. Komplex számok. x 2 = 1 és x 2 + x + 1 = 0. egyenletek megoldását számnak tekinthessük:
 . Komplex számok A valós számok és a számegyenes pontjai között kölcsönösen egyértelmű megfeleltetés létesíthető. A számfogalom a számegyenes pontjainak körében nem bővíthető tovább. A számfogalom bővítését
. Komplex számok A valós számok és a számegyenes pontjai között kölcsönösen egyértelmű megfeleltetés létesíthető. A számfogalom a számegyenes pontjainak körében nem bővíthető tovább. A számfogalom bővítését
Integrálszámítás. a Matematika A1a-Analízis nevű tárgyhoz november
 Integrálszámítás a Matematika Aa-Analízis nevű tárgyhoz 009. november Tartalomjegyzék I. Feladatok 5. A határozatlan integrál (primitív függvények........... 7.. A definíciók egyszerű következményei..................
Integrálszámítás a Matematika Aa-Analízis nevű tárgyhoz 009. november Tartalomjegyzék I. Feladatok 5. A határozatlan integrál (primitív függvények........... 7.. A definíciók egyszerű következményei..................
8. előadás. Kúpszeletek
 8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás)
") Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11
![5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11](/thumbs/93/113569557.jpg "5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11") Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
Transzformáció a főtengelyekre és a nem főtengelyekre vonatkoztatott. Az ellipszis a sík azon pontjainak mértani helye, amelyeknek két adott pontól
 Ellipsis.tex, February 9, 01 Az ellipszis Az ellipszis leírása Az ellipszis szerkesztése és tulajdonságai Az ellipszis kanonikus egyenlete A kör vetülete ellipszis Az ellipszis polárkoordinátás egyenlete
Ellipsis.tex, February 9, 01 Az ellipszis Az ellipszis leírása Az ellipszis szerkesztése és tulajdonságai Az ellipszis kanonikus egyenlete A kör vetülete ellipszis Az ellipszis polárkoordinátás egyenlete
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Koordinátageometria Megoldások
 005-0XX Középszint Koordinátageometria Megoldások 1) Adott két pont: A 4; 1 felezőpontjának koordinátáit! AB felezőpontja legyen F. és B 3 1; Írja fel az AB szakasz 1 3 + 4 + 1 3 F ; = F ;1 ) Egy kör sugarának
005-0XX Középszint Koordinátageometria Megoldások 1) Adott két pont: A 4; 1 felezőpontjának koordinátáit! AB felezőpontja legyen F. és B 3 1; Írja fel az AB szakasz 1 3 + 4 + 1 3 F ; = F ;1 ) Egy kör sugarának
Síkbeli egyenesek. 2. Egy egyenes az x = 1 4t, y = 2 + t parméteres egyenletekkel adott. Határozzuk meg
 Analitikus mértan 3. FELADATLAP Síkbeli egyenesek 1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az origón
Analitikus mértan 3. FELADATLAP Síkbeli egyenesek 1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az origón
Koordináta geometria III.
 Koordináta geometria III. TÉTEL: A P (x; y) pont akkor és csak akkor illeszkedik a K (u; v) középpontú r sugarú körre (körvonalra), ha (x u) 2 + (y v) 2 = r 2. Ez az összefüggés a K (u; v) középpontú r
Koordináta geometria III. TÉTEL: A P (x; y) pont akkor és csak akkor illeszkedik a K (u; v) középpontú r sugarú körre (körvonalra), ha (x u) 2 + (y v) 2 = r 2. Ez az összefüggés a K (u; v) középpontú r
Koordináta-geometria feladatok (középszint)
") Koordináta-geometria feladatok (középszint) 1. (KSZÉV Minta (1) 2004.05/I/4) Adott az A(2; 5) és B(1; 3) pont. Adja meg az AB szakasz felezőpontjának koordinátáit! 2. (KSZÉV Minta (2) 2004.05/I/7) Egy
Koordináta-geometria feladatok (középszint) 1. (KSZÉV Minta (1) 2004.05/I/4) Adott az A(2; 5) és B(1; 3) pont. Adja meg az AB szakasz felezőpontjának koordinátáit! 2. (KSZÉV Minta (2) 2004.05/I/7) Egy
I. VEKTOROK, MÁTRIXOK
 217/18 1 félév I VEKTOROK, MÁTRIXOK I1 I2 Vektorok 1 A síkon derékszögű koordinátarendszerben minden v vektornak van vízszintes és van függőleges koordinátája, ezeket sorrendben v 1 és v 2 jelöli A v síkbeli
217/18 1 félév I VEKTOROK, MÁTRIXOK I1 I2 Vektorok 1 A síkon derékszögű koordinátarendszerben minden v vektornak van vízszintes és van függőleges koordinátája, ezeket sorrendben v 1 és v 2 jelöli A v síkbeli
Geometria 1 normál szint
 Geometria 1 normál szint Naszódi Márton nmarci@math.elte.hu www.math.elte.hu/ nmarci ELTE TTK Geometriai Tsz. Budapest Geometria 1 p.1/4 Vizsga 1 Írásban, 90 perc. 2 Személyazonosságot igazoló okmány nélkül
Geometria 1 normál szint Naszódi Márton nmarci@math.elte.hu www.math.elte.hu/ nmarci ELTE TTK Geometriai Tsz. Budapest Geometria 1 p.1/4 Vizsga 1 Írásban, 90 perc. 2 Személyazonosságot igazoló okmány nélkül
Két körhenger általánosabban ( Alkalmazzuk a vektoralgebrát! ) 1. ábra
 1. ábra") Két körhenger általánosabban ( Alkalmazzuk a vektoralgebrát! ) Egy korábbi dolgozatunkban címe: Két egyenes körhenger a merőlegesen metsződő tengelyű körhengerek áthatási feladatával foglalkoztunk. Most
Két körhenger általánosabban ( Alkalmazzuk a vektoralgebrát! ) Egy korábbi dolgozatunkban címe: Két egyenes körhenger a merőlegesen metsződő tengelyű körhengerek áthatási feladatával foglalkoztunk. Most
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
Diszkrét matematika 1. estis képzés
 Diszkrét matematika 1. estis képzés 2019. tavasz 1. Diszkrét matematika 1. estis képzés 5. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Mérai László diái alapján
Diszkrét matematika 1. estis képzés 2019. tavasz 1. Diszkrét matematika 1. estis képzés 5. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Mérai László diái alapján
I. Vektorok. Adott A (2; 5) és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:
 és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:") I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
Lineáris egyenletrendszerek
 Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
x = 1 = ı (imaginárius egység), illetve x 12 = 1 ± 1 4 2
, illetve x 12 = 1 ± 1 4 2") Komplex számok A valós számok és a számegyenes pontjai között kölcsönösen egyértelmű megfeleltetés létesíthető. A számfogalom a számegyenes pontjainak körében nem bővíthető tovább. A számfogalom bővítését
Komplex számok A valós számok és a számegyenes pontjai között kölcsönösen egyértelmű megfeleltetés létesíthető. A számfogalom a számegyenes pontjainak körében nem bővíthető tovább. A számfogalom bővítését
Síkbeli egyenesek Egy egyenes az x = 1 4t, y = 2 + t parméteres egyenletekkel adott. Határozzuk meg
 Analitikus mértan 5. FELADATLAP Síkbeli egyenesek 5.1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az
Analitikus mértan 5. FELADATLAP Síkbeli egyenesek 5.1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az
1. tétel. 1. Egy derékszögű háromszög egyik szöge 50, a szög melletti befogója 7 cm. Mekkora a háromszög átfogója? (4 pont)
") 1. tétel 1. Egy derékszögű háromszög egyik szöge 50, a szög melletti befogója cm. Mekkora a háromszög átfogója? (4 pont). Adott az ábrán két vektor. Rajzolja meg a b, a b és az a b vektorokat! (6 pont)
1. tétel 1. Egy derékszögű háromszög egyik szöge 50, a szög melletti befogója cm. Mekkora a háromszög átfogója? (4 pont). Adott az ábrán két vektor. Rajzolja meg a b, a b és az a b vektorokat! (6 pont)
Lin.Alg.Zh.1 feladatok
 Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Matematika II képletek. 1 sin xdx =, cos 2 x dx = sh 2 x dx = 1 + x 2 dx = 1 x. cos xdx =,
 Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Tárgy. Forgóasztal. Lézer. Kamera 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL
 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
Klár Gergely 2010/2011. tavaszi félév
 Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Pont 1 Pont 2 3 4 5 Tartalom Pont Descartes-koordináták Homogén koordináták
Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Pont 1 Pont 2 3 4 5 Tartalom Pont Descartes-koordináták Homogén koordináták
1. Transzformációk mátrixa
 1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)