Tudományos Diákköri Konferencia Marási folyamatok stabilizálása abszorberrel. Szerző: Bakonyvári Dávid Konzulens: Lehotzky Dávid
|
|
|
- Rebeka Tóthné
- 6 évvel ezelőtt
- Látták:
Átírás
1 Tudományos Diákköri Konferencia 2015 Marási folyamatok stabilizálása abszorberrel Szerző: Bakonyvári Dávid Konzulens: Lehotzky Dávid
2 Tartalomjegyzék Kivonat....3 Abstract Bevezetés Abszorberrel kiegészített egy szabadságfokú modellek Egy szabadságfokú marás abszorberrel kiegészített modellje Stabilitás vizsgálat szemi diszkretizációval Egy szabadságfokú esztergálás abszorberrel kiegészített modellje Stabilitás vizsgálat D szeparációs módszerrel Stabilitás vizsgálat szemi diszkretizációval Egy szabadságfokú abszorberes marás és esztergálás összehasonlítása stabilitás szempontjából Nagysebességű marás abszorber alkalmazása esetén Abszorberes marás és nagy sebességű megmunkálás összehasonlítása stabilitás szempontjából egy szabadságfokú esetre Abszorberrel kiegészített két szabadságfokú marás modellek Két szabadságfokú marás abszorberrel kiegészített modellje Stabilitás vizsgálat szemi diszkretizációval Két szabadságfokú abszorberes marás és esztergálás összehasonlítása stabilitás szempontjából Nagy sebességű két szabadságfokú marás abszorberrel kiegészített modellje Abszorberes marás és nagy sebességű megmunkálás összehasonlítása stabilitás szempontjából két szabadságfokú esetre Összefoglalás, távlati tervek.61 A Melléklet Egy szabadságfokú modellek és stabilitás vizsgálatuk.62 A.1 Esztergálás egy szabadságfokú modellje és stabilitás vizsgálata..62 A.1.1 D szeparációs módszer.. 65 A.1.2 Esztergálás stabilitás vizsgálata D szeparációs módszerrel A.1.3 Szemi diszkretizáció A.1.4 Esztergálás stabilitás vizsgálata szemi diszkretizációval 70 A.2 Marás stabilitásvizsgálata egy szabadságfokú modell esetén. 73 A.2.1 Marás stabilitás vizsgálata szemi diszkretizációval.. 77 A.3 Nagy sebességű marás analitikus közelítése egy szabadságfokú esetre.. 79 B Melléklet Két szabadságfokú modellek és stabilitás vizsgálatuk B.1 Két szabadságfokú marás modellje és stabilitás vizsgálata B.1.1 Stabilitás vizsgálat szemi diszkretizációval B.2 Esztergálás két szabadságfokú modellje B.3 Nagy sebességű marás két szabadságfokú modellje.. 91 Irodalomjegyzék
3 Kivonat A gyártási folyamatok gazdaságossága szempontjából fontos célkitűzés a megmunkálás sebességének növelése változatlan termékminőség mellett. Az alkatrészek jelentős része esztergálással és marással készül, melyeknél a fenti elvárás az egységnyi idő alatt eltávolított forgácstérfogat növelésével valósul meg. Ezt számos paraméter befolyásolja, köztük a forgácsvastagság és az orsó fordulatszáma, melyek növelése gyorsabb megmunkálást von maga után. Ugyanakkor a folyamatot jellemző paraméterek nem választhatók meg tetszőlegesen. Bizonyos értékeikre a szerszám nagy amplitúdójú rezgéseket végez, melyek nyoma az anyagleválasztás révén megjelenik a munkadarabon is, rosszabb felületi minőséget eredményezve, valamint csökkentve a szerszám élettartamát is. A szerszámgéprezgések fő okozója a regeneratív hatás. Ennek lényege, hogy a korábban megmunkált felület egyenetlenségei gerjesztik a szerszámot a forgácsoló erőn keresztül, így a rendszer stabilitása a kés jelenlegi pozíciója mellett egy korábbi állapottól is függ. Ebből adódóan a szerszámgéprezgések matematikai modelljei késleltetett differenciálegyenlet rendszerek. A forgácsolási folyamatok stabilizálására megoldást nyújt az abszorberek használata. Ugyanakkor a kívánt csillapító hatás eléréséhez szükséges az abszorber paramétereinek megfelelő hangolása. Esztergálás esetén a stabil tartományok, ezzel együtt az abszorber optimális jellemzői analitikus úton meghatározhatóak. Marás esetén azonban csak numerikus úton kapott stabilitási térképekre hagyatkozhatunk, mely megnehezíti az abszorber hangolását. Munkám során egy bonyolultabb és egy egyszerűsített, abszorberrel rendelkező marási modellt vizsgáltam. Az egyszerűsített modellel analitikus becslést adtam a stabilitás határára nagy radiális fogásmélységek esetén. Az analitikus formulák jelentősen leegyszerűsítik a hangolás folyamatát. Az egyszerűsített modell eredményeit összevetettem a bonyolultabb modellel, így ellenőriztem az analitikus megoldás alkalmazhatósági határait. 3
4 Abstract In order to remain economically competitive, the reduction of the time demand of machining while maintaining the required level of quality is an important objective in production. The majority of parts are made by metal cutting, where the effectiveness of the cutting process can be measured by the so called material removal rate, which refers to the volume of substance removed in a unit time. The material removal rate depends on several parameters, including the chip thickness and spindle speed. An increase in the latter two leads to a faster machining process. However, these parameters cannot be chosen freely. At certain values, the tool performs large amplitude vibrations, known as chatter, which increases the tool wear and results in poor surface finish and inefficient machining. The main cause of chatter is the regenerative effect. The tool is excited by the previously cut wavy surface via the cutting force, thus the stability of the system depends not only on the present, but also on the previous displacement of the tool. The stability of machining processes can be enhanced by adding a vibration absorber to the structure, however it must be tuned precisely in order to reach the desired improvement in stability. In case of turning, the stable domains and the optimal parameters of the absorber can be derived analytically, yet for milling we must rely on numerical calculations which makes the tuning of the absorber more complicated. In this study I dealt with milling models which are subject to vibration absorber. Using these models, analytical formulas were derived for full immersion milling, which is for high radial immersions. Owing to the analytical formulas, the tuning of vibration absorbers becomes much simpler for the simplified model than performing numerical calculations for general models. The validity of analytical formulas was checked by the comparison of results for the simplified model and for a general model. 4
5 1. Bevezetés A gyártási folyamatok során fontos követelmény a megmunkálás sebességének növelése változatlan termékminőség mellett. Esztergálás és marás esetén a fenti elvárás az egységnyi idő alatt eltávolított forgácstérfogat növelésével valósul meg. Ezt számos paraméter befolyásolja, köztük a forgácsvastagság és az orsó fordulatszáma, melyek növelése gyorsabb megmunkálást von maga után. Ugyanakkor a folyamatot jellemző paraméterek nem választhatók meg tetszőlegesen. Bizonyos értékeikre a szerszám nagy amplitúdójú rezgéseket végez, melyek nyoma az anyagleválasztás révén megjelenik a munkadarabon is, rosszabb felületi minőséget eredményezve, valamint csökkentve a szerszám élettartamát is. A szerszámgéprezgések fő okozója a regeneratív hatás. Ennek lényege, hogy a korábban megmunkált felület egyenetlenségei gerjesztik a szerszámot a forgácsoló erőn keresztül, így a rendszer stabilitása a kés jelenlegi pozíciója mellett egy korábbi állapottól is függ. Az esztergálást és marás modellje, ezek stabilitását leíró összefüggések az szakirodalomból jól ismertek [1], melyek segítségével meghatározva a stabilitás határát, kiválaszthatjuk az optimális, még rezgésmentes megmunkáláshoz szükséges beállításokat. Több megoldás is létezik a stabil tartományok növelésére, erre egy lehetőség az abszorberek használata. Ezek léteznek aktív és passzív kivitelben is, bár az utóbbival elérhető csillapító hatás a gyakorlatban korlátolt mértékű, előnyére válik az egyszerű és olcsó kivitelezhetőség. Az abszorberrel rendelkező esztergálásra több eredmény is létezik [2, 3], ugyanakkor az alkalmazás egyik fő problémáját az abszorbert jellemző paraméterek optimális beállítása, a hangolás jelenti. Erre a [3] cikk ad egy analitikus közelítést, eredetileg csillapítatlan rendszer feltételezése mellett. Munkám során az abszorberes marást, és az erre adható közelítéseket, egyszerűsítéseket vizsgáltam, figyelembe véve ezek érvényességi tartományát. A marás folyamata nagy radiális fogásmélység és fogszám esetén esztergálással közelíthető. Míg marás esetén csak numerikus úton kapott stabilitási térképekre hagyatkozhatunk, addig esztergálás során a stabil tartományok analitikus úton meghatározhatóak. A megmunkálási paraméterek másik szélső esetét tekintve, kis fogszám és radiális fogásmélység esetén is lehetőségünk van egy egyszerűbb, könnyebben kezelhető marás modell használatára. Ennek abszorber nélküli esetét [4, 5, 6] írják le, analitikus megoldást adva a stabilitás határára, ugyanakkor abszorber alkalmazása mellett ez nem adható meg előzőekhez hasonló egyszerű formában, itt további közelítésekre van szükség. 5
6 2. Abszorberrel kiegészített egy szabadságfokú modellek A következő fejezetben egy szabadságfokú marás és esztergálás modelleket vizsgálok abszorber alkalmazása mellett. Az ennek alapjául szolgáló egy szabadságfokú modellek és ezek stabilitás vizsgálatára alkalmazott módszerek az A mellékletben találhatóak. Elsőként az abszorberes marásról, ennek stabilitás vizsgálatáról lesz szó, majd az esztergálás és nagysebességű marás adta egyszerűsítési lehetőségekre térek ki, figyelembe véve, hogy az egyes modellek milyen tartományon feleltethetőek meg egymásnak. 2.1 Egy szabadságfokú marás abszorberrel kiegészített modellje A marás egy szabadságfokú modelljét kiegészítve egy abszorberrel a ábrán látható elrendezéshez jutunk. Az abszorber tömeggel rendelkezik,, csillapításon és, merevségen keresztül kapcsolódik a szerszámhoz, melyet továbbra is tömege, csillapítása és merevsége jellemez. Feltételezzük, hogy az abszorber is csak irányban mozdulhat el. Jelen modell szerint az abszorber közvetlenül a szerszámvéghez kapcsolódik, mely a számítást tekintve jelentős egyszerűsítés, ugyanakkor ez a valóságban nem kivitelezhető ábra 6
7 Két szabadságfokú rendszer révén a mozgásegyenlet a következő alakú lesz:, ahol az általános koordináta. A ábra segítségével felírható a mozgási energia, disszipatív potenciál és potenciális energia kifejezése, melyek segítségével a tömeg, csillapítási és merevségi mátrixok meghatározhatók , t, , t, , t, A tömeg, csillapítási és merevségi mátrixok: 0 0,,,,,,,,,,, melyeket visszaírva a mozgásegyenletbe: t,,,, t,,,, t 0. A forgácsoló erő nem zérus komponense megegyezik az abszorber nélküli, egy szabadságfokú marás modellnél szereplő A kifejezéssel. A differenciálegyenlet megoldása alakban kereshető, ahol felel meg a periodikus mozgásnak, az e körüli zavarásnak.,, A fenti alakját behelyettesítve a mozgásegyenlet kifejezésébe: Amennyiben nincs zavarás, tehát 0 és, a mozgásegyenlet az alábbi: A forgácsoló erőt re nézve linearizálva: mely rövidebben: ,
8 Behelyettesítve a egyenletbe, figyelembe vételével a periodikus mozgáshoz tartozó tagok kiesnek, így a következő mozgásegyenlethez jutunk: 0 0,,,,,,,, Az első egyenletet osztva el, másodikat val, az alábbi egyenletrendszert kapjuk: , t,,,,,,, 0, melyet dimenziótlanítva, felhasználva az egy szabadságfokú abszorber nélküli modellnél (A.2 melléklet) használt jelöléseket, továbbá az abszorberre bevezetve csillapítási tényezőt és sajátkörfrekvenciát, valamint az abszorber és szerszám tömegének arányára, a sajátfrekvenciáik arányára értéket:,,, 2,,, a mozgásegyenlet a következő lesz: T A fenti egyenletrendszer rövidebben kifejezve:
9 2.1.1 Stabilitás vizsgálat szemi diszkretizációval A stabilitás vizsgálathoz a egyenletet átírva elsőrendű rendszerré: T mely a jelölést alkalmazva: , A fenti egyenletrendszert ajánlott a következő alakra hozni, a számítási igény csökkentéséhez:, , ahol:,, ,, A szemi diszkretizációhoz és mátrixokat átlagértékükkel helyettesítjük minden egyes ; intervallumon: 1 dt, 1 dt Az intervallumonként állandó és mátrixok esetén alkalmazható a szemi diszkretizáció:, ; Amennyiben invertálható, úgy kifejezhető:,, ahol:,
10 Mátrixos alakban felírva: A fenti összefüggés és időpontok között alakban adható meg. Hasonlóan megadható a többi 1,2 mátrix is, így a jelenlegi, és az diszkretizációs lépéssel későbbi közötti kapcsolat: A stabilitás feltétel továbbra is az, hogy mátrix összes sajátértéke abszolút értékben kisebb legyen, mint egy. 10
11 2.2 Egy szabadságfokú esztergálás abszorberrel kiegészített modellje A mechanikai modell a ábrán látható. Az eredeti esztergálás modellt (A.1 melléklet), melyet a szerszám tömege, csillapítása és merevsége jellemzett, kiegészítettük egy tömegű abszorberrel, mely, csillapításán és, merevségén keresztül kapcsolódik magához a szerszámhoz. Továbbra is csak irányú elmozdulást feltételezünk, így az abszorber felszerelése egy két szabadságfokú rendszert eredményez ábra A mozgásegyenlet t általános koordináta mellett a következő alakú: A ábra alapján felírható a mozgási energia, disszipatív potenciál és potenciális energia kifejezése, melyek segítségével a tömeg, csillapítási és merevségi mátrixok meghatározhatóak: , ,, , A tömeg, csillapítási és merevségi mátrixok: 0 0,,,,,,,,,,,
12 melyeket behelyettesítve a mozgásegyenletbe a következőt kapjuk: ,,,,,,,, 0, ahol a forgácsoló erő nem zérus komponense megegyezik az abszorber nélküli egy szabadságfokú esztergálás modellnél meghatározott kifejezéssel: Az erő fenti alakját szerint linearizálva: 0 0, A megoldást továbbra is alakban keresve, ahol írja le a periodikus mozgást, az e körüli zavarást, ezzel együtt a mozgásegyenlet: t,,, Amennyiben nincs zavarás, a következőre egyszerűsödik:, ahol: A fentiek alapján a mozgásegyenlet az alábbi alakra hozható: Az egyenletrendszer első egyenletét osztva el, másodikat val:,,,,,,,, A fenti egyenletrendszert dimenziótlanítva, felhasználva az egy szabadságfokú esztergálás modellnél A A szereplő jelöléseket, továbbá az abszorberre bevezetve sajátkörfrekvenciát és csillapítási tényezőt, valamint az abszorber és szerszám viszonyára tömegarányt, és frekvenciaarányt: 12
13 ,,, 2,, A mozgásegyenlet dimenziótlanított alakja: mely rövidebben formában a következő: , Stabilitás vizsgálat D szeparációs módszerrel Az egy szabadságfokú abszorber nélküli esztergáláshoz hasonlóan, jelen esetben is alkalmazható a szeparáció módszere a stabilitási határok analitikus meghatározására. A egyenletrendszer megoldását A A alakban keresve: A A A A 1 A A A fenti egyenletrendszer, 0 egyszerűsítés mellett, szétbontva: A A. A A2 2 2A A1 A 0, A 2A 2A A A A második egyenletből kifejezve A t: A 2 2 A, majd behelyettesítve az első egyenletbe, a karakterisztikus egyenlet az alábbi: A karakterisztikus egyenlet helyettesítés mellett: cos sin
14 Felbontva valós és képzetes részre, a valós rész egyenletéből kifejezve 1cos t, a képzetes rész egyenletéből sin t, bevezetve az alábbi jelölést: 1cos, sin, ahol és az alábbiak: , Ezek segítségével a görbék megadhatók az abszorber nélküli esztergálásnál ismert módon: 2 30, arctg, Stabilitás vizsgálat szemi diszkretizációval A szemi diszkretizációs módszer alkalmazásához egyenletet átírva elsőrendű rendszerré: A fenti egyenletrendszert átalakítva a következő alakra: , ,
15 ahol:,, ,, A szemi diszkretizáció az egy szabadságfokú esztergálás modellnél alkalmazott lépésekkel végezhető el, a megoldás, intervallumon a következő:, melyet időpontban kiértékelve kapcsolatot teremtünk és között: Ez esetben is és jelölést használva:, mely mátrixos alakban a következő: Akárcsak az eredeti esztergálás modell esetén, a fenti egyenletrendszernek megfelelő összefüggés 1,2, együttható mátrixai nem változnak az időlépések során, szorzat sajátértékei helyett elegendő így sajátértékeit vizsgálni. A rendszer akkor stabil, ha összes sajátértéke kisebb, mint egy. 15
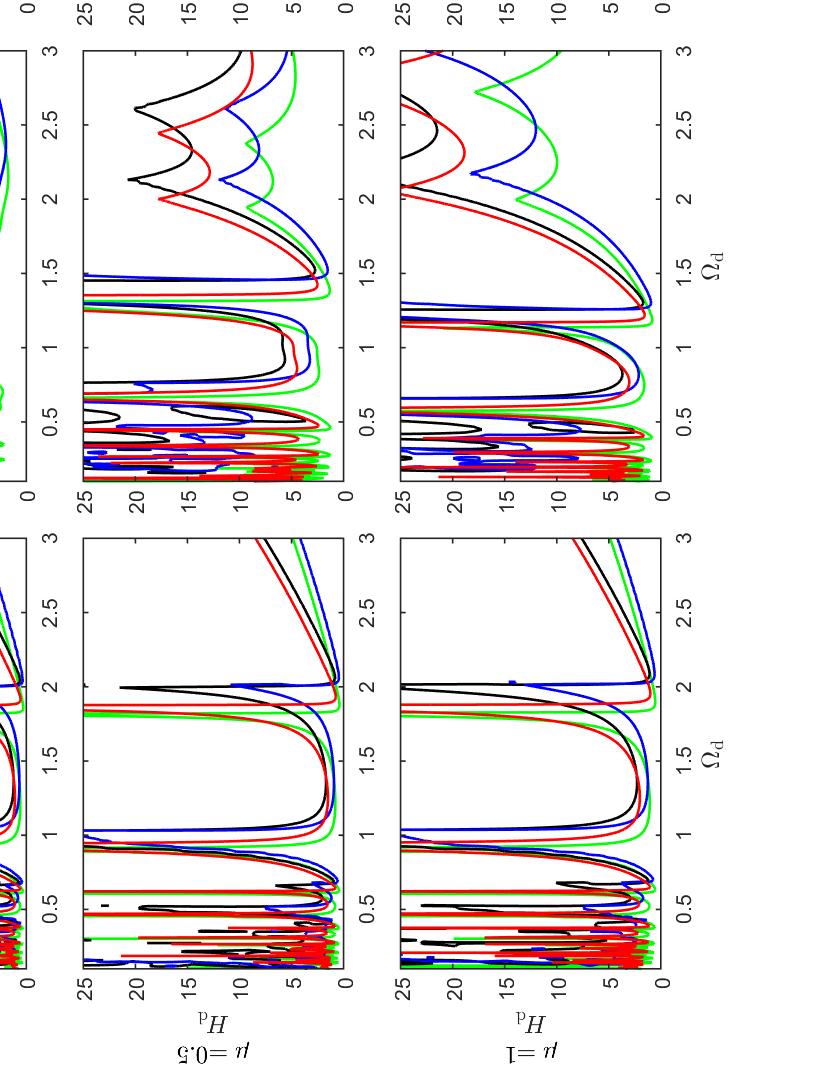
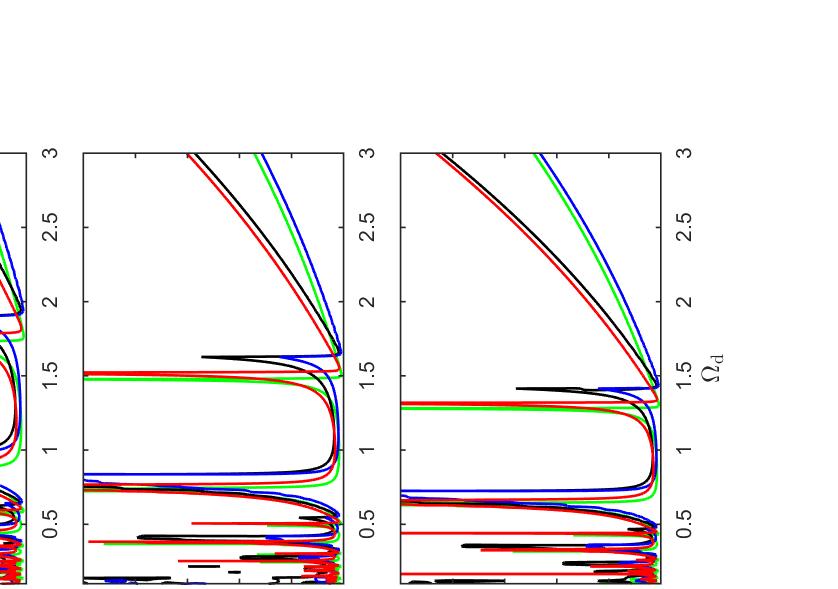
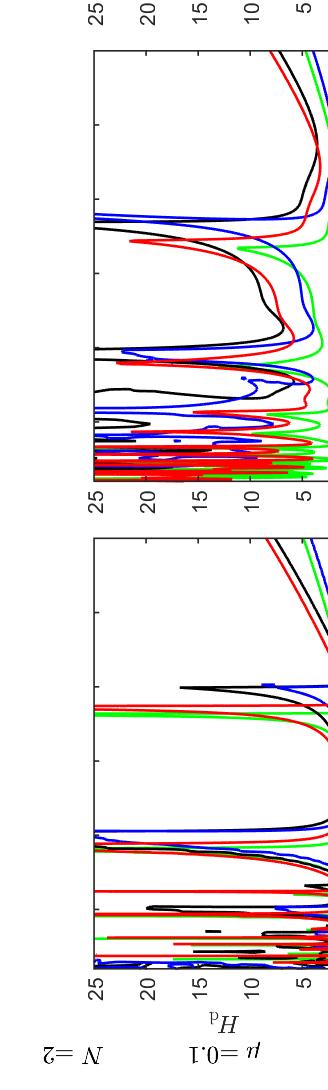
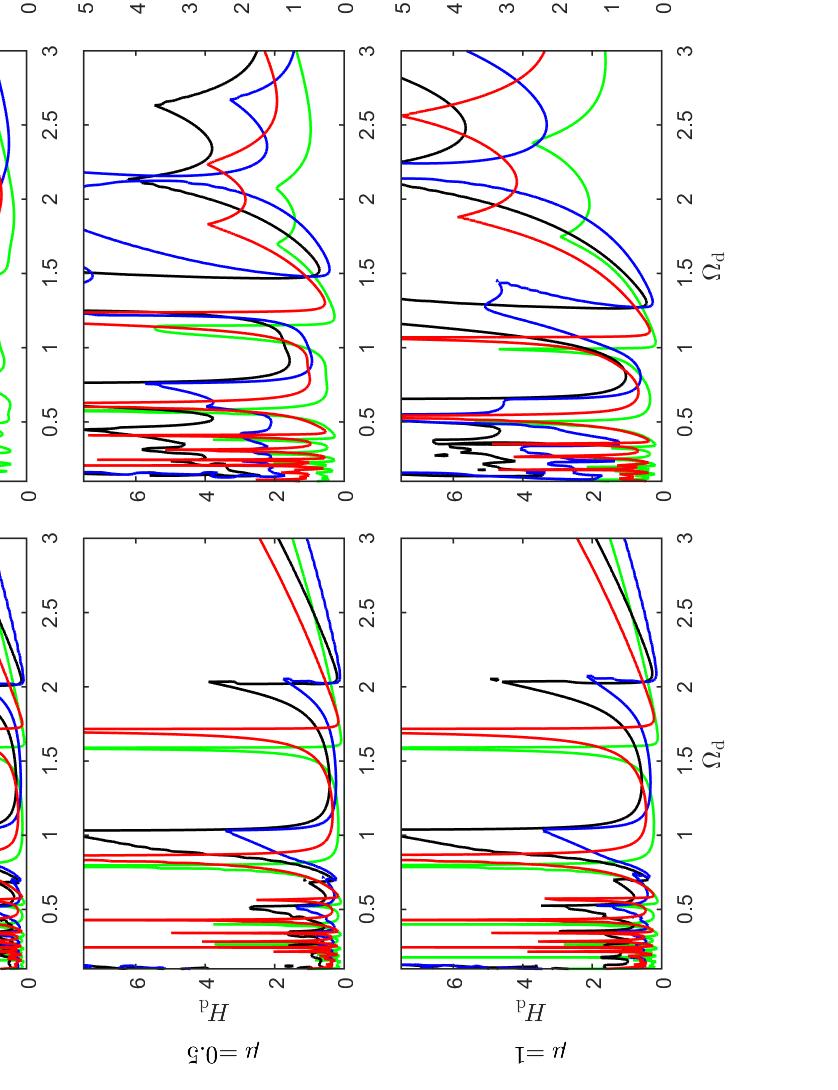
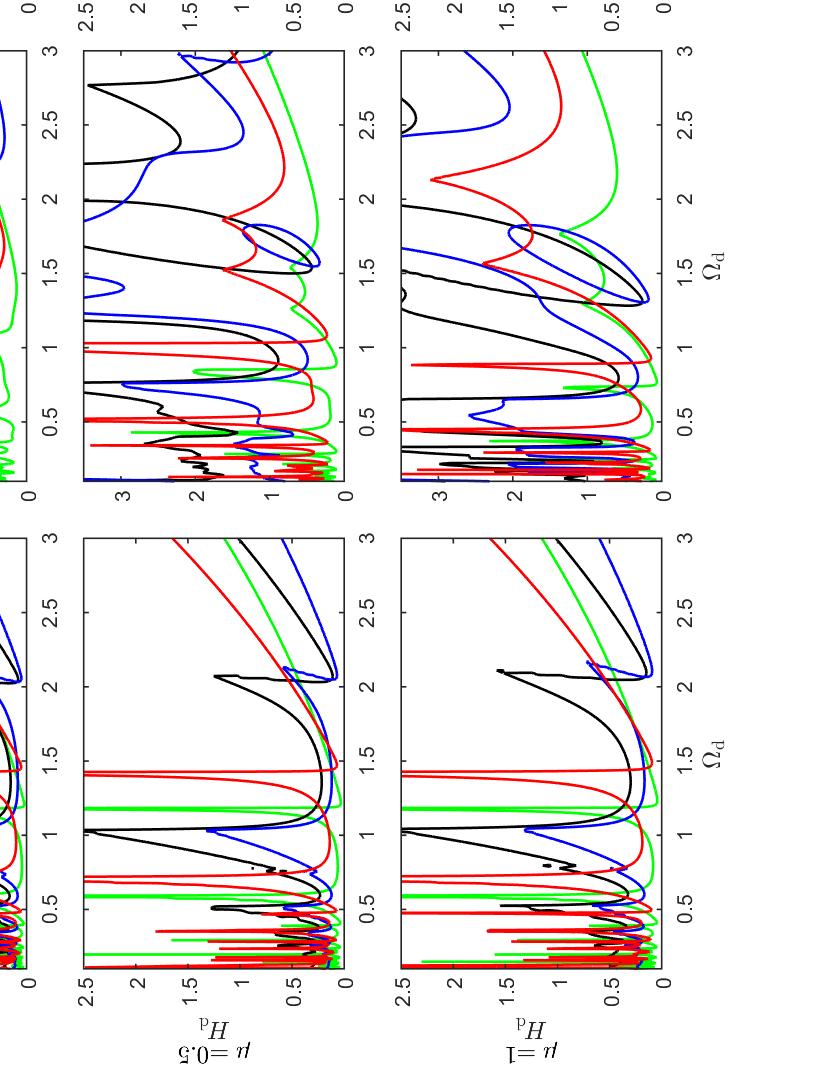
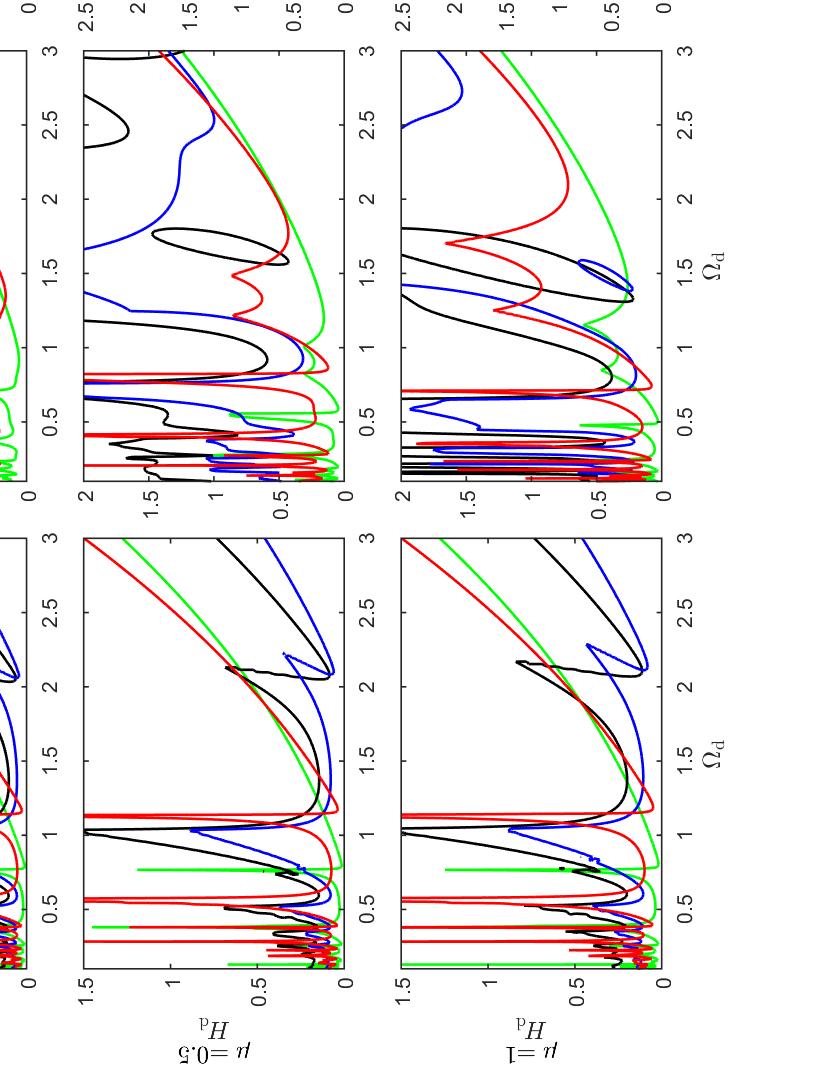
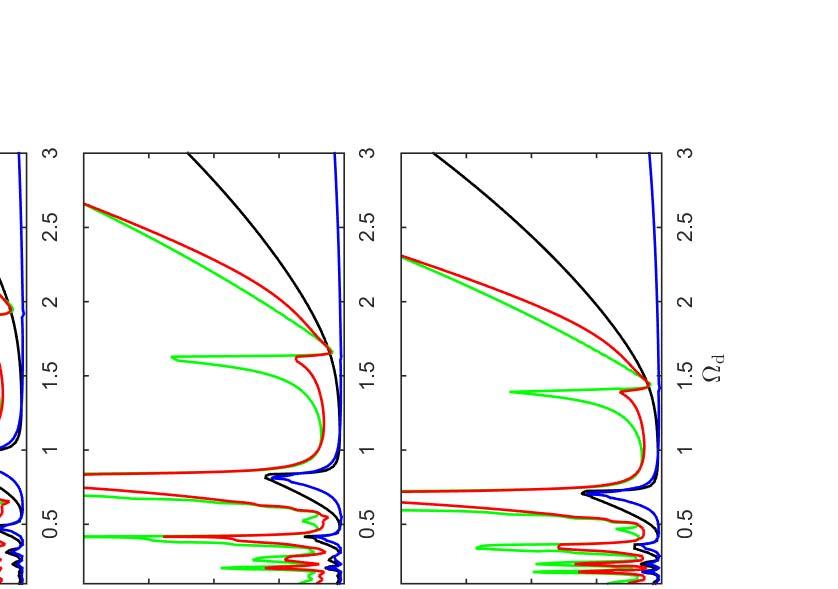
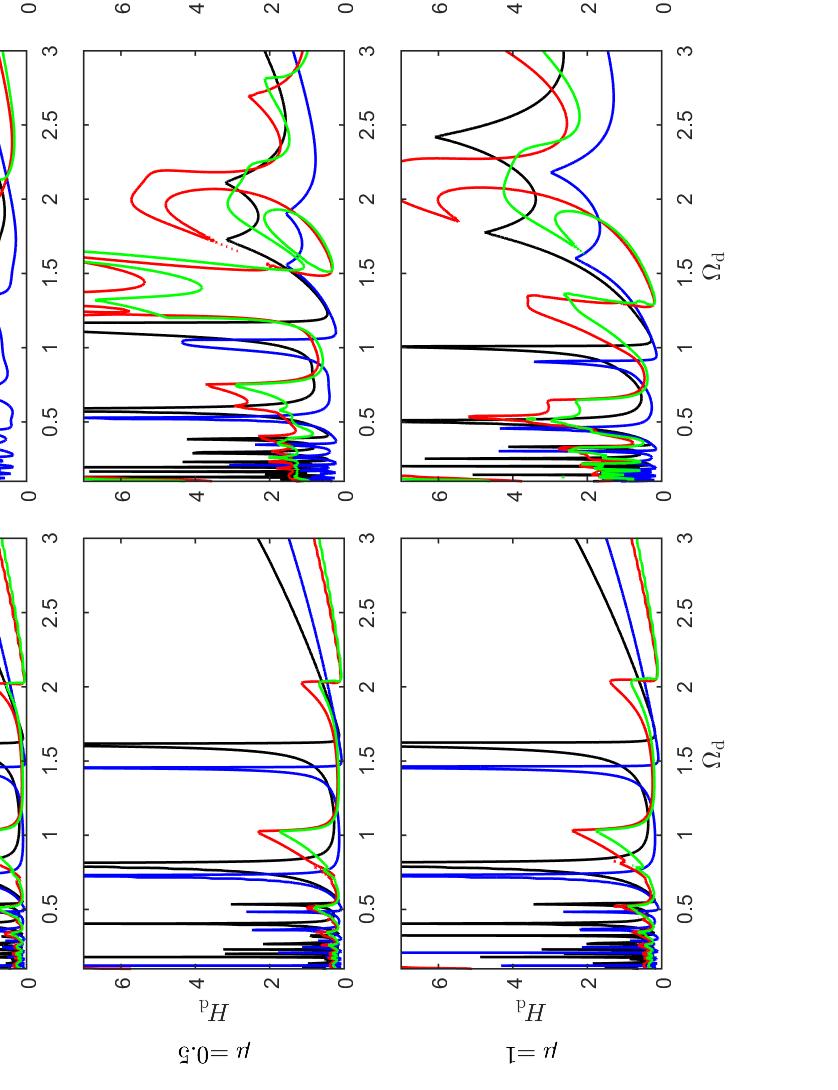
16 2.3 Egy szabadságfokú abszorberes marás és esztergálás összehasonlítása stabilitás szempontjából Az előzőekben bemutatásra került az egy szabadságfokú marás és esztergálás abszorberrel kiegészített modellje és ezek stabilitás vizsgálata. Mivel abszorber nélküli esetben nagy fogszám és radiális fogásmélység esetén a marás folyamata esztergálással közelíthető, így feltételeztem, hogy abszorber alkalmazása mellett is lehetőség van hasonló közelítésre. Ennek igazolására összehasonlítottam a két folyamatot jellemző stabilitási térképeket. Az abszorber nélküli modellekben az összehasonlítás alapját fogszám, valamint / radiális fogásmélység és átmérő hányadosa adja. Az abszorber alkalmazásával érdemes megvizsgálni továbbá a pontban definiált tömegarány és sajátfrekvenciák arányának hatását is. A stabilitási térképek összevetése során az egyes fogszámokra több tömegarány és frekvenciaarány értékpár mellett meghatároztam az esztergálás stabilitásának határát jellemző görbét, majd ezzel egy diagramon ábrázoltam ellenirányú marásra, néhány jellegzetes / értékpár esetén. Tekintettel arra, hogy a szerszám és az abszorber csillapítási tényezői nehezen befolyásolhatók, a közelítés jóságára gyakorol hatásukat nem vizsgáltam, állandó értékeik 0,02 és 0,2. A marást jellemző további paraméter 3/4 és / 10/3. A szemi diszkretizációnál alkalmazott lépésköz 40. Az eredményeket a következő nyolc oldal tartalmazza. Amint látható, két fog esetén a marás / 0,1 és / 0,5 ös paraméterekhez tartozó stabilitás határát jellemző görbéi már jellegre hasonlítanak az esztergáláséra, lényeges eltérés 2 érték körül adódik, valamint 1 esetén a közelítés hibája nagyobb, mint a másik két beállításra. Két fogra a vizsgált paraméterek közül / 1 esetén különböznek leginkább a marásra és esztergálásra kapott eredmények. Tovább növelve a fogszámot, azt tapasztaljuk, hogy a marás stabilitás szempontjából valóban közelíthető esztergálással, függetlenül az abszorber jellemzőitől vagy a radiális fogásmélység és átmérő hányadosától. 16
17 17
18 18
19 19
20 20
21 21
22 22
23 23
24 24
25 2.4 Nagysebességű marás abszorber alkalmazása esetén A nagysebességű marás abszorberrel kiegészített modellje a ábrán látható. Az abszorber miatt a szabad rezgést leíró összefüggésekre más adódik az abszorber nélküli esethez képest (A.3 melléklet), ugyanakkor a vágás során a forgácsolási erő zérustól eltérő komponense, és ennek közelítése változatlan ábrán Mindkét esetben, szabad rezgés és vágás során is a mozgásegyenlet két szabadságfokú rendszer révén: alakú, ahol az általános koordináta, szabad rezgés esetén értelem szerűen zérus, anyagleválasztás során 0 A tömeg, csillapítási és merevségi mátrixok megegyeznek az abszorberes marás esetén meghatározott kifejezésekkel. Elsőként a szabad rezgést vizsgálva ; intervallumon a mozgásegyenlet a következő: 0 0,,,,,,,, 0 0, Ahogy a egyenleten látható, mivel a csillapítási és merevségi mátrixok nem diagonálisak, így nem alkalmazható az abszorber nélküli esetre bemutatott analitikus megoldás. 25
26 A egyenletet átírva elsőrendű rendszerré: Ez tömörebben kifejezhető: alakban is, melynek megoldását az állandók variálásának módszerével kereshetjük: Idő szerint deriválva, majd egyenlővé téve egyenlettel:, A kifejezésben, mivel, így, tehát konstans vektor. Visszahelyettesítve egyenletbe: Kezdeti feltételként, melyből értéke meghatározható: A ; intervallumon a megoldás:, melyet kiértékelve pontban: A fenti egyenletben szereplő e megadja a leképezést a szabad rezgés kezdetét jellemző, valamint végét leíró között. Az e mátrix exponens számításához, mivel ϵ, lényegében egy negyedfokú egyenlet megoldása szükséges. Bár erre létezik analitikus megoldás, ez rendkívül hosszadalmas és nem ad gyakorlati szempontból kezelhető végeredményt. Megpróbáltam a mátrix exponens definíciója alapján a sor első 3 4 tagjával közelíteni az összeget, ekkor még elég rövid lenne az analitikus formula ahhoz, hogy a stabilitás vizsgálat során érdemi következtetést tudjunk levonni az eredményből.! Az mátrixot dimenziótlanítva vizsgáltam, hogy az abszorber milyen csillapítása, tömegaránya, és frekvenciaaránya mellett lehetséges a fenti közelítés. A hiba ugyan jelentősen függött az abszorber jellemzőitől, de a legjobb esetekre is túl nagynak bizonyult. Ezzel szemben csökkentésével sokat javult a konvergencia, nagyobb fogszámokra, radiális fogásmélységekre és orsó fordulatszámra sikerült visszakapni numerikusan számolt értékével meghatározott stabilitás térképeket. Ugyanakkor ez esetben a nagy sebességű 26
27 marás feltételezései sérülnek, ezen beállítások mellett már nem mondható el, hogy 1, így a Taylor polinomos közelítéses megoldást elvetettem. Bár analitikus megoldást így nem sikerült adnom abszorberrel kiegészített nagy sebességű marás esetére, de vizsgálható, hogy stabilitás térképei mennyire felelnek meg az abszorberes marás esetén kapott eredményekkel. Amennyiben helyesnek bizonyul a nagy sebességű marás közelítése abszorberes esetre, úgy a későbbiekben érdemes lehet további mátrix exponens számítási módszert is figyelembe venni egy analitikus közelítéshez [7]. A stabilitás térképek meghatározásához nézzük a szabad rezgés után következő ; intervallumonkénti vágás esetét, mely megadja az és közti leképezést: ,,,,,,,, 0. Felhasználva az abszorber nélküli esetre levezetett erő kifejezését Δ a mozgásegyenlet a következő lesz: 0 0,,,,,,,, Az egyenleteket integrálva ; határok közt: dt Δ. 0, dt, dt, dt, dt Δ, dt, dt, dt, dt, dt Eredményül a következőt kapjuk:, ,,
28 Felhasználva az abszorber nélküli esetnél bevezetett és jelölést, továbbá legyen az mátrix exponens edik sorának edik eleme, a következőt írhatjuk fel: , , 0 0 0, ,,, 0 0, ,, 0. 1,, A fenti egyenletrendszer megadható alakban, ahol a stabilitás feltétele továbbra is az, hogy mátrix összes sajátértéke abszolút értékben kisebb legyen egynél. Ahhoz, hogy majd összevessük az itt kapott eredményeket, az abszorberes marás modellnél meghatározott stabilitás térképekkel, ismét dimenziótlanítjuk az egyenletrendszert az A pontban bevezetett jelöléseket használva. A szabad rezgést leíró mozgásegyenlet dimenziótlanítás után:, ahol: , 1, melyet átírva elsőrendű rendszerré:, A dimenziótlan és közti kapcsolat, segítségével, alakban fejezhető ki, melyet a vágással kiegészítve, a mátrix dimenziótlanított alakjára a következő adható:,,,,,,,, ,, 1,,,,,,,,,, 28
29 2.5 Abszorberes marás és nagy sebességű megmunkálás összehasonlítása stabilitás szempontjából egy szabadságfokú esetre A 2.4 fejezetben bemutatásra került az egy szabadságfokú abszorberrel kiegészített nagy sebességű marás modellje és stabilitás vizsgálata. Ugyanakkor kérdéses, hogy a levezetés során használt közelítések, melyek segítségével eljutottunk a fenti modellhez, a rendszert jellemző paraméterek milyen tartományán engedhetők meg. Ennek eldöntésére összehasonlítottam a marást és nagy sebességű megmunkálást jellemző stabilitási térképeket. Az egyes fogszámokra több tömegarány és frekvenciaarány értékpár mellett, néhány jellegzetes / beállításra meghatároztam a két folyamat stabilitásának határait jellemző görbéket. A szerszám és az abszorber csillapítási tényezőinek az abszorberes nagy sebességű marás és az eredeti abszorberes marás modell közti kapcsolatára kifejtett hatását nem vizsgáltam, továbbiakban ezeket állandónak tekintettem, 0,02 és 0,2. Emellett 3/4, / 10/3, és a szemi diszkretizációnál alkalmazott lépésköz 30. Az eredményeket a következő hat oldal tartalmazza. A nagy sebességű marás feltételezéseinek megfelelően, csak kis fogszám és radiális fogásmélység esetén szoros a kapcsolat két modell stabilitási térképei közt. Ezen paraméterek növelésével, bár a görbék egy határig még jellegre hasonlóak maradtak, eltolódnak egymáshoz képest mentén. Az abszorber paraméterei esetén nem tapasztaltam a közelítésre gyakorolt lényeges hatást. 29
30 30
31 31
32 32
33 33
34 34
35 35
36 3. Abszorberrel kiegészített két szabadságfokú marás modellek A következő fejezetben abszorber hatását vizsgálom a két szabadságfokú marás, és nagy sebességű marás modellje esetén. Emellett kitérek a két szabadságfokú abszorberes marás modell és az esztergálás, illetve nagy sebességű megmunkálás közti kapcsolatra, egyes modellek alkalmazhatóságának határára. 3.1 Két szabadságfokú marás abszorberrel kiegészített modellje A marás két szabadságfokú, abszorberes modelljét az ábra szemlélteti. Az alap két szabadságfokú maráshoz (B.1 melléklet) képest kiegészítést jelent az abszorber, melyet tömege,, és, csillapításai, valamint, és, merevsége jellemez ábra 36
37 A mozgásegyenlet a következő alakban írható fel:, ahol az általános koordináta. A tömeg, csillapítási és merevségi mátrixok számításához felírva a mozgási energia, disszipatív potenciál és potenciális energia összefüggését: , , 1 2,, , 1 2, A fenti egyenletek segítségével a tömeg, csillapítási és merevségi mátrixok meghatározhatóak: , , 0, 0 0, 0,,, 0, 0 0, 0, melyeket behelyettesítve a mozgásegyenletbe:, 0, 0 0, 0,, 3.1.5, 0, 0 0, 0, 0 0 0, 0, , 0, 0 0 0, 0, , 0, 3.1.6, 0, 0 0, 0,., 0, 0 0, 0, 0 0 A forgácsoló erő vektorának nem zérus komponensei megegyeznek a két szabadságfokú marás modellnél meghatározott kifejezésekkel, így az erő 0 0 alakú. AZ egyenlet megoldására a korábbi modellekhez hasonlóan alakot lehet feltételezni, ahol felel meg a periodikus mozgásnak, az e körüli zavarásnak.,,,
38 Behelyettesítve fenti kifejezését az mozgásegyenletbe: Amennyiben nincs zavarás, tehát 0, a megoldás a periodikus mozgást adja alakban, a mozgásegyenlet az alábbi: Az forgácsoló erőt linearizálva re nézve: kifejezést kapjuk, ahol az első tag megegyezik az egyenletben szereplő periodikus mozgáshoz tartozó erővel. Felhasználva a forgácsoló erőre a fenti közelítést, figyelembe véve az egyenlet adta egyszerűsítési lehetőségeket, az egyenlet átírható a következőre:, ahol a következő: , melynek egyes komponenseit a két szabadságfokú marás modellnél B tól B ig szereplő kifejezések írják le. A egyenletrendszer dimenziótlanított alakja: , ahol az abszorber és irányú csillapításainak az aránya, míg az abszorbert jellemző merevségek arány és irányokra:,,,,,
39 A fenti egyenletrendszer rövidebb formában kifejezve: Stabilitás vizsgálat szemi diszkretizációval A egyenletet átírva a következő elsőrendű rendszerré: A fenti egyenletrendszert átalakítva a következő alakra:,, ahol:,,, , A szemi diszkretizáció alkalmazásához és mátrixokat átlagértékükkel kell helyettesítve ; intervallumonként: 1 dt, 1 dt Állandó és mátrixok mellett már közvetlenül alkalmazható a szemi diszkretizáció:, A, intervallumon kapott megoldást kiértékelve a következő pillanatban:, Ez esetben is és jelölést használva:,
40 valamint mátrixos lakban: ami rövidebben összefüggéssel fejezhető ki. A jelenlegi és diszkretizációs lépéssel későbbi közötti kapcsolat alakban adható meg. A stabilitáshoz a korábbi marás modellekhez hasonlóan a mátrix összes sajátértékének abszolút értékben egynél kisebbnek kell lennie. 40
41 3.2 Két szabadságfokú abszorberes marás és esztergálás összehasonlítása stabilitás szempontjából Az egy szabadságfokú abszorberes marás esetére lehetőségünk volt a folyamatot esztergálással közelíteni. A két szabadságfokú esztergálás stabilitás szempontjából visszavezethető egy szabadságfokú esetre, ennek részletes levezetése a B.2 mellékletben található. Ebből adódóan stabilitás tekintetében az esztergálás abszorberrel kiegészített két szabadságfokú modellje sem különbözik az egy szabadságfokú abszorberes esettől. A következőben így a két szabadságfokú abszorberes marás, és egy szabadságfokú abszorberes esztergálás stabilitás térképeit hasonlítom össze. A szerszám és abszorber csillapítási tényezőinek a közelítés jóságára gyakorolt hatását ebben az esetben sem vizsgáltam, értéküket állandónak tekintettem, 0,02 és 0,2. A marást jellemző további paraméter 0,75 és / 107/40, 1, 1, 1, 1. A szemi diszkretizációnál alkalmazott lépésköz 30. Az eredményeket a következő nyolc oldal tartalmazza. A 2.3 fejezetben szereplő egy szabadságfokú esethez hasonlóan jelenleg is azt tapasztaljuk, hogy a fogszám növelésével az esztergálás stabilitásának határát leíró görbék egyre jobban követik a marásét, valamint 1 értékre nagyobb az eltérés, miközben a többi paraméter közelítésre gyakorolt hatása nem számottevő. 41
42 42
43 43
44 44
45 45
46 46
47 47
48 48
49 49
50 3.3 Nagy sebességű két szabadságfokú marás abszorberrel kiegészített modellje A nagysebességű marás abszorberrel kiegészített két szabadságfokú modellje a ábrán látható. A mozgásegyenlet homogén része mind a szabad rezgés, mind a vágás esetére megegyezik a két szabadságfokú abszorberes marás modellnél bemutatott egyenlet homogén részével. Az anyagleválasztás során fellépő erő kifejezése pedig a két szabadságfokú, abszorber nélküli nagysebességű marás (B.3 melléklet) esetén meghatározott értékkel egyezik meg ábra Szabad rezgés esetén, mivel a mozgásegyenletben szereplő tömeg, csillapítás és merevségi mátrixok nem diagonálisak, nem használható az abszorber nélküli esetekben bemutatott megoldás. Az egyenletrendszer alapján a következő: 50
51 0 0 0, 0, , 0, 0 0 0, 0, , 0, 3.3.1, 0, 0 0, 0 0, 0,, 0, 0 0, 0, 0 0. A fenti egyenlet átírható elsőrendű rendszerré, 3.3.2, mely alakban is megadható, kezdeti feltétel mellet. Szabad rezgés esetén, és közti kapcsolatot leíró mátrix meghatározása megegyezik az egy szabadságfokú abszorberrel kiegészített nagy sebességű marásnál látottal, mely levezetés a 2.3 fejezetben található. A megoldás így az alábbi: Vágás esetén a mozgásegyenlet a következő: 0 0 0, 0, , 0, 0 0 0, 0, , 0, mely tömörebben: 3.3.5, 0, 0 0, 0,,, 0, 0 0, 0, alakú, ahol 0 0 nemzérus tagjainak értéke megegyezik a két szabadságfokú nagy sebességű marás esetén meghatározott kifejezéssel. Felhasználva az ott alkalmazott közelítéseket, a mozgásegyenlet,
52 0 0 0, 0, , 0, 0 0 0, 0, , 0,, 0, 0 0, 0,, 0, 0 0, 0, Az első két egyenletet osztva el, második kettőt val, majd ; intervallumon integrálva: dt, dt, dt, dt 3.3.9, dt Δ, dt, dt, dt, dt dt dt, dt Δ, , dt, dt, dt, dt 0, , dt, dt, dt, dt 0. Felhasználva, hogy a vágás során a forgácsoló erő mellett a rugóból és merevségből származó erőhatások és a szerszám elmozdulása elhanyagolható:,,,, ,, 0, ,,
53 A fenti egyenletek felírhatók a következő alakban: , ,, , , ,, , , , , ,, , 0 A szabad rezgés összefüggése segítségével, megadható a kapcsolat két vágás között alakban. A stabilitás feltétele továbbra is az, hogy sajátértékei abszolút értékben kisebbek legyenek egynél. A két szabadságfokú, abszorberes marással való összehasonlításhoz dimenziótlan alakjára van szükség. Ehhez a szabad rezgést leíró egyenletben szereplő dimenziótlan alakja: ahol egyes elemei:, , , Így a szabad rezgés kezdete és vége közti kapcsolatot megadó dimenziótlanítva:, Az dimenziótlan alakja a B B összefüggések segítségével megadható, mely segítségével az előző egyenletet felhasználva együttható mátrix meghatározható. 53
54 3.4 Abszorberes marás és nagy sebességű megmunkálás összehasonlítása stabilitás szempontjából két szabadságfokú esetre Az előző fejezet ismertette az abszorberrel kiegészített nagy sebességű marás modelljét és stabilitás vizsgálatát két szabadságfokra. A 2.5 fejezethez hasonlóan megvizsgáltam milyen tartományon felelnek meg a nagy sebességű marás közelítéseit felhasználva előállított stabilitás térképek a maráséval, jelen esetben két szabadságfokra abszorber használata mellett. Az egyes fogszámokra több tömegarány és frekvenciaarány értékpár mellett, néhány jellegzetes / beállításra meghatároztam a két folyamat stabilitásának határát jellemző görbéket. A szerszám és az abszorber csillapítási tényezőinek az abszorberes nagy sebességű marás és az eredeti abszorberes marás modell közti kapcsolatra kifejtett hatását nem vizsgáltam, továbbiakban ezeket állandónak tekintettem, 0,02 és 0,2. Emellett 3/4, / 107/40, 1, 1, 1, 1 és a szemi diszkretizációnál alkalmazott lépésköz 40. Az eredményeket a következő hat oldal tartalmazza. Az egy szabadságfokú esetre, a 2.5 fejezetben bemutatott eredményekhez igen hasonlóra jutunk két szabadságfokú abszorberes marás és nagy sebességű marás összehasonlítása során. A nagy sebességű marás közelítése kis fogszám és kis /, radiális fogásmélység és átmérő hányadosra lehetséges, ezt 4, és / 0,02 beállítások mellett találtam még elfogadhatónak, függetlenül a többi paraméter hatásától. 54
55 55
56 56
57 57
58 58
59 59
60 60
61 4. Összefoglalás, távlati tervek Munkám során bemutattam az abszorberrel kiegészített marás egy és két szabadságfokú modelljét, ezek stabilitását leíró összefüggéseket. Feltételeztem, hogy nagy fogszám esetén a folyamat esztergálás segítségével közelíthető, míg kis fogszám és radiális fogásmélység mellett a nagy sebességű megmunkálás adta egyszerűsítések használhatók. A két egyszerűbb modellt levezettem abszorber használata mellett egy és két szabadságfokú esetekre, továbbá az abszorberes esztergálás esetén analitikus formulát adtam a stabilitás határára. Összevetve az abszorberes esztergálás stabilitás térképeit a maráséval, egy és két szabadságfokú esetre hasonló eredményeket kaptam, már négy foggal rendelkező szerszámok esetén igazolódott a közelítés helyessége. A fogszámon kívül az abszorber paramétere volt hatással még a közelítés jóságára, egy körüli értékére nagyobb eltérés adódott a két modellel meghatározott stabilitás térképek között. A nagy sebességű megmunkálás esetén is sikerült kapcsolatot találni az egyszerűsített és az eredeti marás modell stabilitás térképei között, a vizsgált paraméterek tekintetében 4 fogszám és / 0,02 értéke jelenti az alkalmazás felső korlátját. Távlati terveim közt szerepel, hogy a modellek közötti kapcsolatot kihasználva hangolási módszert találjak az abszorber jellemzőinek optimális meghatározására. 61
62 A Melléklet Egy szabadságfokú modellek és stabilitás vizsgálatuk A következő melléklet részletesen ismerteti az esztergálásra és marásra alkalmazott egy szabadságfokú modelleket, kitérve a nagy sebességű marás esetére is. Az egyes modellek tárgyalása során szó esik stabilitás vizsgálatukról, így bemutatásra kerül a szeparáció és szemi diszkretizáció módszere is. Az abszorberrel kiegészített egy szabadságfokú modellekhez az itt bemutatott példák szolgálnak alapul. Elsőként A.1. mellékletben az egy szabadságfokú esztergálás modell, ennek leíró egyenletei kerülnek bemutatásra, majd az A.1.1 rövid elméleti összefoglalót ad a szeparációs módszerre, melynek alkalmazása az esztergálás stabilitás vizsgálatára A.1.2 részben található. A szemi diszkretizáció módszerét ugyancsak az esztergálás segítségével ismertetem, melynek megvalósítását A.1.3 elméleti áttekintőjét követően A.1.4 tartalmazza. A marás egy szabadságfokú modelljét A.2 melléklet ismerteti, ezen belül A.2.1 foglalkozik részletesebben stabilitás vizsgálatával. Előző modell kis radiális fogásmélységekre érvényes közelítését A.3 melléklet tartalmazza. A.1 Esztergálás egy szabadságfokú modellje és stabilitás vizsgálata Az esztergálás folyamatát az A.1.1 ábra szemlélteti. A munkadarabról melyek forgástengelye, mozgását állandó 1/min fordulatszám jellemzi a szerszám előtolása mellett történik az anyagleválasztás. Ideális esetben, tökéletesen merev szerszám esetén állandó forgácsvastagság adódik, mely egyben az elméleti forgácsvastagság, és megegyezik a fordulatonkénti előtolás mértékével, ahol az egy fordulat alatt eltelt idő és az előtolás sebessége. A.1.1 ábra 62
63 Azonban a tapasztalat azt mutatja, hogy a megmunkálás során változik a forgácsvastagság, a szerszám rezgései révén egy hullámos felületet alakít ki, következő fordulatnál erről a felületről választ le anyagot, így a forgácsvastagság az előtolás mellett a szerszám egy fordulattal korábbi és jelenlegi pozíciója közti eltéréstől is függ (A.1.2 ábra). Ennek megfelelően a forgácsvastagságra a következő összefüggést írhatjuk fel:, A. 1.2 ahol regeneratív időkésésként jelenik meg. Az egy szabadságfokú modell esetén feltételezzük, hogy a szerszám csak irányban mozdulhat el. Mivel és irányú elmozdulásai elhanyagolhatóak, 60/Ω alakban adható meg. A.1.2 ábra Az A.1.2 ábra segítségével az alábbi mozgásegyenlet írható fel:, A. 1.3 ahol a szerszám modális tömege, a modális csillapítás, pedig a modális merevség irányú jellemzői. A forgácsoló erőnek felel meg, mely tapasztalati összefüggés alapján:. A. 1.4 Az egyenletekben szereplő és konstans együtthatók mérés útján határozhatóak meg. Továbbá jelöli a forgácsszélességet, és forgácsvastagság esetén feltételezzük, hogy a szerszám nem hagyja el a munkadarab felületét, így a megmunkálás során mindig pozitív. A forgácsvastagság A. 1.2 kifejezését felhasználva a forgácsoló erő:, A
64 melyet visszahelyettesítve az A. 1.3 egyenletbe, időkésleltetett differenciál egyenletet eredményez, konstans időkéséssel:. A. 1.6 A differenciálegyenlet megoldását alakban keressük, ahol az egyensúlyi helyzet, pedig az e körüli zavarásnak felel meg. Tekintve az egyensúlyi helyzetet,, a deriváltak eltűnnek, és a mozgásegyenlet az alábbira egyszerűsödik:. A. 1.7 A forgácsoló erő kifejezését az egyensúlyi helyzet körül linearizálva:, A. 1.8 melyet behelyettesítve a mozgásegyenletbe mellett, felhasználva az egyensúlyi helyzetre adott összefüggést a következő adódik:. A. 1.9 A későbbi, bonyolultabb modellekkel való összehasonlításhoz érdemes dimenzótlanítani az esztergálást leíró differenciálegyenletet, ez egyben egyszerűbb alakot is eredményez a stabilitás vizsgálathoz. Elsőként az A. 1.9 egyenletet osztva a szerszám modális tömegével,, valamint új konstansok bevezetésével: 2, A A ahol jelöli sajátkörfrekvenciát, a csillapítási tényezőt és a forgácsolási erő konstans együtthatója:, 2,. A Továbbá bevezetve a dimenziótlan időt, a regeneratív időkésés és a forgácsolási paraméterek dimenziótlan értékei:,, 30, A így A. 1.9 dimenziótlanított alakja: 2. A A minél hatékonyabb megmunkáláshoz ismerni kell a fenti differenciálegyenlet stabilitásának határát, melyet a későbbiek során D szeparációs módszerrel, majd szemi diszkretizáció segítségével vizsgálok. 64
65 A.1.1 D szeparációs módszer Általános esetben egy ed rendű lineáris közönséges differenciálegyenlet a következő alakú:, A ahol ϵ, ϵ, ennek karakterisztikus egyenlete: det 0. A A stabilitás feltétele, hogy a karakterisztikus egyenlet valamennyi gyöke a negatív valós félsíkban helyezkedjen el. Ez esetben elegendő a karakterisztikus gyökök valós részének előjelét ismerni, mely a Routh Hourwitz kritériummal könnyen vizsgálható. A pontszerű késleltetéssel rendelkező késleltetett differenciálegyenletek általánosan az alábbi módon írhatók fel:, A ahol ϵ, ϵ és ϵ. Ez esetben a karakterisztikus egyenletnek végtelen sok gyöke van, melyeket mind figyelembe kell venni a stabilitás vizsgálat során, így nem használható a fent említett módszer. Késleltetett differenciál egyenletek esetén gyakran alkalmazott módszer, hogy a stabil tartományokat a leíró egyenletben szereplő paramétereinek síkján ábrázolják. Erre nyújt egy megoldást a szeparációs módszer, mely segítségével a paramétersík felosztható résztartományokra, melyeken belül az instabil (pozitív valós résszel rendelkező) pólusok száma azonos. A módszer a görbéket adja meg, azokat a görbéket, melyeken áthaladva változik az instabil pólusok száma. Ezek meghatározhatóak, ha a karakterisztikus egyenletbe t helyettesítünk, mely a gyökökre nézve zérus valós részt, az imaginárius tengelyen való áthaladást, így a stabilitás egy lehetséges határát jelenti. Szétbontva valós és képzetes részre két egyenlet adódik: Re, Im, A A melyekből a vizsgált paraméterek stabilitásra gyakorolt hatása a görbék formájában kifejezhető. Kérdéses, hogy a görbéken áthaladva milyen irányban nő, illetve csökken az instabil pólusok száma. Lényegében ez megfelel annak, hogy adott görbék mentén a komplex konjugált gyökpárok, vagy az egyetlen valós gyök, milyen irányban haladnak át a képzetes tengelyen. A gyökök képzetes tengelyen való áthaladásának iránya megadható a valós rész egyik paraméter szerinti parciális deriváltjának előjelével. Amennyiben ez pozitív, úgy a gyökök instabillá válnak, míg a negatív előjel stabil gyököket von maga után. Ezt követően a stabilitási térkép megadható, ha valamelyik görbék által határolt tartományban ismert az instabil gyökök száma. Utóbbi meghatározására szolgáló formula dimenziós rendszerre, ahol 2: 65
66 1 1 sgn, A ahol 0 pedig valós gyökei. Az előző kifejezés 21 dimenziós rendszer esetén a következőre módusul: sgn01 sgn, A ahol 0 pedig nemnegatív gyökeit jelölik. A.1.2 Esztergálás stabilitás vizsgálata D szeparációs módszerrel Az egy szabadságfokú esztergálás modell karakterisztikus egyenletét felírva A alapján: A A karakterisztikus egyenlet helyettesítéssel: 21 cos sin 0, A melyet valós és képzetes részeire bontva a következő két egyenlet adódik: Re: 1 cos 0, Im: 2 sin 0. A A Ezek segítségével meghatározhatók a görbék az paramétersíkon. Elsőként az 0 és 0 egyenleteket az alábbi módon átrendezve: 1 1cos, 2 sin. A A A fenti két egyenletet elosztva egymással, majd a jobb oldali tagot trigonometrikus azonosság segítségével átalakítva: 1 2 1cos sin tg, A arctg,. 2 A
67 A A egyenlet bal oldalán szereplő t kifejezve segítségével, kisebb átrendezés után az re meghatározott görbék:,. A arctg ω 1 2 A paraméterre kifejezett görbék megadásához 0 és 0 egyenletek A és A átrendezett alakját négyzetre emelve: 2 cosω cos ω 1, sin 4. A A Ez követően összeadva az egyenleteket és kifejezést behelyettesítve megadható : 2 2 cosω 2 cosω 1 4, A A A fentiekben meghatározott görbék olyan tartományokra osztják az paramétersíkot, melyeken belül az instabil pólusok száma állandó. Ezt követően annak vizsgálata következik, hogy a görbéken áthaladva milyen irányban nő, illetve csökken az instabil pólusok száma. A gyökök képzetes tengelyen való áthaladási irányának meghatározásához a 0 karakterisztikus egyenlet helyettesítés melletti alakjára lesz szükség: cos sinω 0 A Az egyenletet valós és képzetes részre bontva: ReDλ 21 cos 0, ImDλ 2 2 sin 0. A A A fenti két egyenletet ezt követően szerint kell parciálisan deriválni, figyelembe véve, hogy mind valós és képzetes rész is paraméter függő, tehát,,,. A valós részre: ReDλ 2 2 A fenti egyenlet zérus valós rész, 0 mellett: 2 1 cos A cos sin 0. 2 cos sin 21cos 0. A
68 A képzetes részre: ImDλ sin A A A egyenlet 0 ra: sin cos 0. 2 sin 2 cosω sinω 0. A Utóbbiból kifejezve t: sin 2sin. A cos Behelyettesítve az A egyenletbe megadható : sin sin 2 cos 12 cos sin 2 2 cos.a Mivel a nevező a két négyzetes tag miatt pozitív, előjelét a számláló határozza meg, így a továbbiakban csak ennek az előjelét szükséges vizsgálni. Felhasználva az 0, 0 egyenleteket sin és cos kifejezhető, és az A egyenletben re megadott görbét behelyettesítve számlálójába: , A sin 2, A cosω 1 1. A Egyszerűsítést követően a számláló az alábbi módon adható meg: sin sin 2 cos 12 cos A Mivel és is pozitív, így a fenti kifejezés előjelét az 1 tényező határozza meg: 0, ha 1, 0, ha 1. A A Ha valamelyik görbék által határolt tartományban ismert az instabil pólusok száma, akkor a stabilitás térkép az egész paramétersíkra megadható. Ahhoz, hogy egy részterületen belül az instabil pólusok számát megadjuk, használható a A formula. 68
69 A.1.3 Szemi diszkretizáció Közönséges differenciálegyenletek esetében az egyértelmű megoldáshoz annyi skalár egyenletet kell megadni kezdeti feltételként, ahányad rendű a differenciálegyenlet. Ezzel szemben, mivel késleltetett differenciál egyenletek végtelen dimenziósak, megoldásukhoz végtelen sok kezdeti feltétel, egy kezdeti függvény megadása szükséges. A szemi diszkretizáció alapgondolata, hogy a kezdeti függvényt diszkretizálva, az eredeti késleltetett differenciálegyenletet véges számú elemi közönséges differenciálegyenlettel közelíti, mivel a késleltetett tag így intervallumonként konstans (A.1.3 ábra). A.1.3 ábra A numerikus módszernél alkalmazott lépésköz, az. mintavételezési időpont. Az időkésés felbontása, ezzel együtt az időkésés pontos értéke 1/2, ugyanakkor kellően nagy esetén közelítés elfogadható. A szemi diszkretizáció alkalmazása során a következőben az lesz a cél, hogy A alakú differenciálegyenletre ; intervallumon kapcsolatot teremtsen és között, formában. Hasonló kapcsolat található a többi egymást követő időpontra is. Így és között a következő áll fenn:,. A A
70 A.1.4 Esztergálás stabilitás vizsgálata szemi diszkretizációval A szemi diszkretizáció során az A egyenlet időkésleltetett tagjait szakaszonként állandónak tekintve, T ϵ T ;T intervallumra a következő írható fel: 2 1, A ahol a későbbiek során az jelölést alkalmazom. Az egyenletet átírva elsőrendű rendszerré: A Ez rövidebben megadható az alábbi formában:, A ahol: A Ugyanakkor a késleltetett tagot célszerű átalakítani:,, 0 1, 0, A A A így jelentősen lehet csökkenteni a számítás során használt mátrixok méretén, mely gyorsabb futást eredményez. Az A megoldásához még szükséges egy kezdeti feltétel, melyet alakban adhatunk meg. A megoldást az állandók variálásának módszerével keresve: A alakban írható fel, ahol egyenlőre ismeretlen függvény. A fenti kifejezés idő szerinti deriváltja:. A Az A egyenletben bevezetve a jelölést, behelyettesítve A t és egyenlővé téve a fenti egyenlettel:,. A A
71 Egyszerűsítés után kifejezhető:,, A A melyből kifejezésére a következőt kapjuk: ds. A Az kezdeti feltételt felhasználva konstans vektor meghatározható: ds ds, A. 1.67,. A A ismeretében az alábbi alakban adható meg: ds. A Ha invertálható, akkor az integrálás elvégzése után a megoldás ϵ ; intervallumra:,. A A A következő, időpontban kiértékelve megadható :. A Továbbá bevezetve és jelölést:,, A A a megoldás az alábbi egyszerű formában adható meg:. A
72 Az A megoldás mátrixos alakban a következő: A A fenti összefüggés tömörebben és időpontok között:, A valamint megadható a rákövetkező időlépésekre is:,,, A A A ezzel kapcsolatot teremtve az diszkretizációs lépéssel későbbi érték és a jelenlegi között:,, A A ahol a stabilitáshoz mátrix összes sajátértékének abszolút értékben kisebbnek kell lennie, mint egy:,, 1. A Tekintettel arra, hogy és mátrixok konstansok, értékük nem változik az időlépések során, így minden mátrix azonos lesz: 1,2,,. A A stabilitáshoz ez esetben elegendő csak sajátértékeit vizsgálni, hogy abszolút értékben kisebbek legyenek, mint egy. 72
73 A.2 Marás stabilitásvizsgálata egy szabadságfokú modell esetén A marás folyamatára az egyik legegyszerűbb modell az A.2.1 ábrán látható egy szabadságfokú rendszer. A.2.1 ábra A szerszám az irányban rugalmas, tömege, csillapítását valamint merevségét jelöli, a forgácsoló erőnek is csak irányba eső komponense zérustól különböző. A rendszer az alábbi egyenlettel írható le:. A. 2.1 A szerszámnak darab egyenlően kiosztott foga van, ezekre a későbbiekben 1,2, index utal. Ahogy az A.2.2 ábrán látható, az egyes fogakra ható erő felbontható tangenciális és radiális összetevőkre, melyek a következő módon írhatók le:,,,, A. 2.2 A. 2.3 ahol és a tangenciális és radiális forgácsolási együtthatók, az axiális fogásmélység a forgácsvastagság a edik fognál, pedig az erőszámításhoz használt tapasztalati konstans kitevő. Az esztergálással szemben, marás esetén adott pillanatban nem vesz részt minden fog az anyagleválasztásban, ezt ablakfüggvény segítségével vehetjük figyelembe. Ennek függvényértéke egy, ha a vizsgált fog éppen vág, ellenkező esetben nulla. 73
74 Az ablakfüggvény mellett a forgácsvastagság, így a forgácsolási erő meghatározásához is szükséges az egyes fogak helyzetének ismerete, mely egyértelműen leírható a hozzájuk tartozó szöggel az alábbi módon: 2Ω A. 2.4 A fenti szög értelmezése függ a megmunkálás módjától, eltérő ponttól mérjük egyenés ellenirányú marás esetén, ahogy ez az A.2.3 és A.2.4 ábrán is látható. A.2.2 ábra A.2.3 ábra: ellenirányú marás A.2.4 ábra: egyirányú marás 74
Folytonos rendszeregyenletek megoldása. 1. Folytonos idejű (FI) rendszeregyenlet általános alakja
 rendszeregyenlet általános alakja") Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Egyenletek, egyenlőtlenségek VII.
 Egyenletek, egyenlőtlenségek VII. Magasabbfokú egyenletek: A 3, vagy annál nagyobb fokú egyenleteket magasabb fokú egyenleteknek nevezzük. Megjegyzés: Egy n - ed fokú egyenletnek legfeljebb n darab valós
Egyenletek, egyenlőtlenségek VII. Magasabbfokú egyenletek: A 3, vagy annál nagyobb fokú egyenleteket magasabb fokú egyenleteknek nevezzük. Megjegyzés: Egy n - ed fokú egyenletnek legfeljebb n darab valós
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉPSZINT Abszolútértékes és gyökös kifejezések
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉPSZINT Abszolútértékes és gyökös kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉPSZINT Abszolútértékes és gyökös kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
KOVÁCS BÉLA, MATEMATIKA II.
 KOVÁCS BÉLA MATEmATIkA II 9 IX Magasabbrendű DIFFERENCIÁLEGYENLETEk 1 Alapvető ÖSSZEFÜGGÉSEk n-ed rendű differenciálegyenletek Az alakú ahol n-edrendű differenciálegyenlet általános megoldása tetszőleges
KOVÁCS BÉLA MATEmATIkA II 9 IX Magasabbrendű DIFFERENCIÁLEGYENLETEk 1 Alapvető ÖSSZEFÜGGÉSEk n-ed rendű differenciálegyenletek Az alakú ahol n-edrendű differenciálegyenlet általános megoldása tetszőleges
x 2 e x dx c) (3x 2 2x)e 2x dx x sin x dx f) x cosxdx (1 x 2 )(sin 2x 2 cos 3x) dx e 2x cos x dx k) e x sin x cosxdx x ln x dx n) (2x + 1) ln 2 x dx
 (3x 2 2x)e 2x dx x sin x dx f) x cosxdx (1 x 2 )(sin 2x 2 cos 3x) dx e 2x cos x dx k) e x sin x cosxdx x ln x dx n) (2x + 1) ln 2 x dx") Integrálszámítás II. Parciális integrálás. g) i) l) o) e ( + )(e e ) cos h) e sin j) (sin 3 cos) m) arctg p) arcsin e (3 )e sin f) cos ( )(sin cos 3) e cos k) e sin cos ln n) ( + ) ln. e 3 e cos 3 3 cos
Integrálszámítás II. Parciális integrálás. g) i) l) o) e ( + )(e e ) cos h) e sin j) (sin 3 cos) m) arctg p) arcsin e (3 )e sin f) cos ( )(sin cos 3) e cos k) e sin cos ln n) ( + ) ln. e 3 e cos 3 3 cos
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
KOVÁCS BÉLA, MATEMATIKA II.
 KOVÁCS BÉLA MATEmATIkA II 8 VIII Elsőrendű DIFFERENCIÁLEGYENLETEk 1 Alapvető ÖSSZEFÜGGÉSEk Elsőrendű differenciálegyenlet általános és partikuláris megoldása Az vagy (1) elsőrendű differenciálegyenlet
KOVÁCS BÉLA MATEmATIkA II 8 VIII Elsőrendű DIFFERENCIÁLEGYENLETEk 1 Alapvető ÖSSZEFÜGGÉSEk Elsőrendű differenciálegyenlet általános és partikuláris megoldása Az vagy (1) elsőrendű differenciálegyenlet
Függvény határérték összefoglalás
 Függvény határérték összefoglalás Függvény határértéke: Def: Függvény: egyértékű reláció. (Vagyis minden értelmezési tartománybeli elemhez, egyértelműen rendelünk hozzá egy elemet az értékkészletből. Vagyis
Függvény határérték összefoglalás Függvény határértéke: Def: Függvény: egyértékű reláció. (Vagyis minden értelmezési tartománybeli elemhez, egyértelműen rendelünk hozzá egy elemet az értékkészletből. Vagyis
8. Egyenletek, egyenlőtlenségek, egyenletrendszerek II.
 8 Egyenletek, egyenlőtlenségek, egyenletrendszerek II Elméleti összefoglaló Az a + b+ c, a egyenletet másodfokú egyenletnek nevezzük A D b ac kifejezést az egyenlet diszkriminánsának nevezzük Ha D >, az
8 Egyenletek, egyenlőtlenségek, egyenletrendszerek II Elméleti összefoglaló Az a + b+ c, a egyenletet másodfokú egyenletnek nevezzük A D b ac kifejezést az egyenlet diszkriminánsának nevezzük Ha D >, az
Példa: Tartó lehajlásfüggvényének meghatározása a Rayleigh Ritz-féle módszer segítségével
 Példa: Tartó lehajlásfüggvényének meghatározása a Rayleigh Ritz-féle módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 2013. szeptember 23. Javítva: 2013.10.09.
Példa: Tartó lehajlásfüggvényének meghatározása a Rayleigh Ritz-féle módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 2013. szeptember 23. Javítva: 2013.10.09.
Németh László Matematikaverseny április 16. A osztályosok feladatainak javítókulcsa
 Németh László Matematikaverseny 007. április 16. A 9-10. osztályosok feladatainak javítókulcsa Feladatok csak 9. osztályosoknak 1. feladat a) Vegyük észre, hogy 7 + 5 felírható 1 + 3 + 6 + alakban, így
Németh László Matematikaverseny 007. április 16. A 9-10. osztályosok feladatainak javítókulcsa Feladatok csak 9. osztályosoknak 1. feladat a) Vegyük észre, hogy 7 + 5 felírható 1 + 3 + 6 + alakban, így
Differenciálegyenletek. Vajda István március 4.
 Analízis előadások Vajda István 2009. március 4. Függvényegyenletek Definíció: Az olyan egyenleteket, amelyekben a meghatározandó ismeretlen függvény, függvényegyenletnek nevezzük. Függvényegyenletek Definíció:
Analízis előadások Vajda István 2009. március 4. Függvényegyenletek Definíció: Az olyan egyenleteket, amelyekben a meghatározandó ismeretlen függvény, függvényegyenletnek nevezzük. Függvényegyenletek Definíció:
Késleltetett dinamikai rendszerek stabilitásának és stabilizálhatóságának vizsgálata numerikus módszerekkel
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM MŰSZAKI MECHANIKAI TANSZÉK Késleltetett dinamikai rendszerek stabilitásának és stabilizálhatóságának vizsgálata numerikus módszerekkel Szerző: LEHOTZKY Dávid
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM MŰSZAKI MECHANIKAI TANSZÉK Késleltetett dinamikai rendszerek stabilitásának és stabilizálhatóságának vizsgálata numerikus módszerekkel Szerző: LEHOTZKY Dávid
Tartalomjegyzék. Tartalomjegyzék Valós változós valós értékű függvények... 2
 Tartalomjegyzék Tartalomjegyzék... Valós változós valós értékű függvények... Hatványfüggvények:... Páratlan gyökfüggvények:... Páros gyökfüggvények... Törtkitevős függvények (gyökfüggvények hatványai)...
Tartalomjegyzék Tartalomjegyzék... Valós változós valós értékű függvények... Hatványfüggvények:... Páratlan gyökfüggvények:... Páros gyökfüggvények... Törtkitevős függvények (gyökfüggvények hatványai)...
2. REZGÉSEK Harmonikus rezgések: 2.2. Csillapított rezgések
 . REZGÉSEK.1. Harmonikus rezgések: Harmonikus erő: F = D x D m ẍ= D x (ezt a mechanikai rendszert lineáris harmonikus oszcillátornak nevezik) (Oszcillátor körfrekvenciája) ẍ x= Másodrendű konstansegyütthatós
. REZGÉSEK.1. Harmonikus rezgések: Harmonikus erő: F = D x D m ẍ= D x (ezt a mechanikai rendszert lineáris harmonikus oszcillátornak nevezik) (Oszcillátor körfrekvenciája) ẍ x= Másodrendű konstansegyütthatós
3. Előadás. Megyesi László: Lineáris algebra, oldal. 3. előadás Lineáris egyenletrendszerek
 3. Előadás Megyesi László: Lineáris algebra, 47. 50. oldal. Gondolkodnivalók Determinánsok 1. Gondolkodnivaló Determinánselméleti tételek segítségével határozzuk meg a következő n n-es determinánst: 1
3. Előadás Megyesi László: Lineáris algebra, 47. 50. oldal. Gondolkodnivalók Determinánsok 1. Gondolkodnivaló Determinánselméleti tételek segítségével határozzuk meg a következő n n-es determinánst: 1
Feladatok az 5. hétre. Eredményekkel és teljesen kidolgozott megoldásokkal az 1,2,3.(a),(b),(c), 6.(a) feladatokra
,(b),(c), 6.(a) feladatokra") Feladatok az 5. hétre. Eredményekkel és teljesen kidolgozott megoldásokkal az 1,,3.(a),(b),(), 6.(a) feladatokra 1. Oldjuk meg a következő kezdeti érték feladatot: y 1 =, y(0) = 3, 1 x y (0) = 1. Ha egy
Feladatok az 5. hétre. Eredményekkel és teljesen kidolgozott megoldásokkal az 1,,3.(a),(b),(), 6.(a) feladatokra 1. Oldjuk meg a következő kezdeti érték feladatot: y 1 =, y(0) = 3, 1 x y (0) = 1. Ha egy
Feladatok a Diffrenciálegyenletek IV témakörhöz. 1. Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel.
 Feladatok a Diffrenciálegyenletek IV témakörhöz 1 Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel (a) y 3y 4y = 3e t (b) y 3y 4y = sin t (c) y 3y 4y = 8t
Feladatok a Diffrenciálegyenletek IV témakörhöz 1 Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel (a) y 3y 4y = 3e t (b) y 3y 4y = sin t (c) y 3y 4y = 8t
Matematikai geodéziai számítások 10.
 Matematikai geodéziai számítások 10. Hibaellipszis, talpponti görbe és közepes ponthiba Dr. Bácsatyai, László Matematikai geodéziai számítások 10.: Hibaellipszis, talpponti görbe és Dr. Bácsatyai, László
Matematikai geodéziai számítások 10. Hibaellipszis, talpponti görbe és közepes ponthiba Dr. Bácsatyai, László Matematikai geodéziai számítások 10.: Hibaellipszis, talpponti görbe és Dr. Bácsatyai, László
Mechanika I-II. Példatár
 Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanika Tanszék Mechanika I-II. Példatár 2012. május 24. Előszó A példatár célja, hogy támogassa a mechanika I. és mechanika II. tárgy oktatását
Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanika Tanszék Mechanika I-II. Példatár 2012. május 24. Előszó A példatár célja, hogy támogassa a mechanika I. és mechanika II. tárgy oktatását
Határozatlan integrál (2) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Határozatlan integrál () First Prev Next Last Go Back Full Screen Close Quit 1. Az összetett függvények integrálására szolgáló egyik módszer a helyettesítéssel való integrálás. Az idevonatkozó tétel pontos
Határozatlan integrál () First Prev Next Last Go Back Full Screen Close Quit 1. Az összetett függvények integrálására szolgáló egyik módszer a helyettesítéssel való integrálás. Az idevonatkozó tétel pontos
3. Fékezett ingamozgás
 3. Fékezett ingamozgás A valóságban mindig jelen van valamilyen csillapítás. A gázban vagy folyadékban való mozgásnál, kis sebesség esetén a csillapítás arányos a sebességgel. Ha az vagy az ''+k sin =0,
3. Fékezett ingamozgás A valóságban mindig jelen van valamilyen csillapítás. A gázban vagy folyadékban való mozgásnál, kis sebesség esetén a csillapítás arányos a sebességgel. Ha az vagy az ''+k sin =0,
Szélsőérték feladatok megoldása
 Szélsőérték feladatok megoldása A z = f (x,y) függvény lokális szélsőértékének meghatározása: A. Szükséges feltétel: f x (x,y) = 0 f y (x,y) = 0 egyenletrendszer megoldása, amire a továbbiakban az x =
Szélsőérték feladatok megoldása A z = f (x,y) függvény lokális szélsőértékének meghatározása: A. Szükséges feltétel: f x (x,y) = 0 f y (x,y) = 0 egyenletrendszer megoldása, amire a továbbiakban az x =
egyenlőtlenségnek kell teljesülnie.
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT Abszolútértékes és gyökös kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT Abszolútértékes és gyökös kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval
Exponenciális és logaritmikus kifejezések Megoldások
 Eponenciális és logaritmikus kifejezések - megoldások Eponenciális és logaritmikus kifejezések Megoldások ) Igazolja, hogy az alábbi négy egyenlet közül az a) és jelű egyenletnek pontosan egy megoldása
Eponenciális és logaritmikus kifejezések - megoldások Eponenciális és logaritmikus kifejezések Megoldások ) Igazolja, hogy az alábbi négy egyenlet közül az a) és jelű egyenletnek pontosan egy megoldása
Példa: Háromszög síkidom másodrendű nyomatékainak számítása
 Példa: Háromszög síkidom másodrendű nyomatékainak számítása Készítette: Dr. Kossa Attila kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék. február 6. Határozzuk meg az alábbi ábrán látható derékszögű háromszög
Példa: Háromszög síkidom másodrendű nyomatékainak számítása Készítette: Dr. Kossa Attila kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék. február 6. Határozzuk meg az alábbi ábrán látható derékszögű háromszög
valós számot tartalmaz, mert az ilyen részhalmazon nem azonosság.
 2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
3. Lineáris differenciálegyenletek
 3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
Egyenletek, egyenletrendszerek, egyenlőtlenségek Megoldások
 ) Egyenletek, egyenletrendszerek, egyenlőtlenségek - megoldások Egyenletek, egyenletrendszerek, egyenlőtlenségek Megoldások a) Oldja meg a valós számok halmazán az alábbi egyenletet! = 6 (5 pont) b) Oldja
) Egyenletek, egyenletrendszerek, egyenlőtlenségek - megoldások Egyenletek, egyenletrendszerek, egyenlőtlenségek Megoldások a) Oldja meg a valós számok halmazán az alábbi egyenletet! = 6 (5 pont) b) Oldja
Hódmezővásárhelyi Városi Matematikaverseny április 14. A osztályosok feladatainak javítókulcsa
 Hódmezővásárhelyi Városi Matematikaverseny 2003. április 14. A 11-12. osztályosok feladatainak javítókulcsa 1. feladat Egy számtani sorozatot az első eleme és különbsége egyértelműen meghatározza, azt
Hódmezővásárhelyi Városi Matematikaverseny 2003. április 14. A 11-12. osztályosok feladatainak javítókulcsa 1. feladat Egy számtani sorozatot az első eleme és különbsége egyértelműen meghatározza, azt
Megoldott feladatok november 30. n+3 szigorúan monoton csökken, 5. n+3. lim a n = lim. n+3 = 2n+3 n+4 2n+1
 Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Trigonometria Megoldások. 1) Igazolja, hogy ha egy háromszög szögeire érvényes az alábbi összefüggés: sin : sin = cos + : cos +, ( ) ( )
 Igazolja, hogy ha egy háromszög szögeire érvényes az alábbi összefüggés: sin : sin = cos + : cos +, ( ) ( )") Trigonometria Megoldások Trigonometria - megoldások ) Igazolja, hogy ha egy háromszög szögeire érvényes az alábbi összefüggés: sin : sin = cos + : cos +, ( ) ( ) akkor a háromszög egyenlő szárú vagy derékszögű!
Trigonometria Megoldások Trigonometria - megoldások ) Igazolja, hogy ha egy háromszög szögeire érvényes az alábbi összefüggés: sin : sin = cos + : cos +, ( ) ( ) akkor a háromszög egyenlő szárú vagy derékszögű!
Feladatok megoldásokkal a 9. gyakorlathoz (Newton-Leibniz formula, közelítő integrálás, az integrálszámítás alkalmazásai 1.
 Feladatok megoldásokkal a 9. gyakorlathoz (Newton-Leibniz formula, közelítő integrálás, az integrálszámítás alkalmazásai.). Feladat. Határozzuk meg az alábbi integrálokat: a) x x + dx d) xe x dx b) c)
Feladatok megoldásokkal a 9. gyakorlathoz (Newton-Leibniz formula, közelítő integrálás, az integrálszámítás alkalmazásai.). Feladat. Határozzuk meg az alábbi integrálokat: a) x x + dx d) xe x dx b) c)
Rezgőmozgás. A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele
 Rezgőmozgás A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele A rezgés fogalma Minden olyan változás, amely az időben valamilyen ismétlődést mutat rezgésnek nevezünk. A rezgések fajtái:
Rezgőmozgás A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele A rezgés fogalma Minden olyan változás, amely az időben valamilyen ismétlődést mutat rezgésnek nevezünk. A rezgések fajtái:
Matematika III. harmadik előadás
 Matematika III. harmadik előadás Kézi Csaba Debreceni Egyetem, Műszaki Kar Debrecen, 2013/14 tanév, I. félév Kézi Csaba (DE) Matematika III. harmadik előadás 2013/14 tanév, I. félév 1 / 13 tétel Az y (x)
Matematika III. harmadik előadás Kézi Csaba Debreceni Egyetem, Műszaki Kar Debrecen, 2013/14 tanév, I. félév Kézi Csaba (DE) Matematika III. harmadik előadás 2013/14 tanév, I. félév 1 / 13 tétel Az y (x)
Matematikai geodéziai számítások 5.
 Matematikai geodéziai számítások 5 Hibaterjedési feladatok Dr Bácsatyai László Matematikai geodéziai számítások 5: Hibaterjedési feladatok Dr Bácsatyai László Lektor: Dr Benedek Judit Ez a modul a TÁMOP
Matematikai geodéziai számítások 5 Hibaterjedési feladatok Dr Bácsatyai László Matematikai geodéziai számítások 5: Hibaterjedési feladatok Dr Bácsatyai László Lektor: Dr Benedek Judit Ez a modul a TÁMOP
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 8 VIII. REGREssZIÓ 1. A REGREssZIÓs EGYENEs Két valószínűségi változó kapcsolatának leírására az eddigiek alapján vagy egy numerikus
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 8 VIII. REGREssZIÓ 1. A REGREssZIÓs EGYENEs Két valószínűségi változó kapcsolatának leírására az eddigiek alapján vagy egy numerikus
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Abszolútértékes és gyökös kifejezések Megoldások
 Abszolútértékes és gyökös kifejezések Megoldások ) Igazolja, hogy az alábbi négy egyenlet közül az a) és b) jelű egyenletnek pontosan egy megoldása van, a c) és d) jelű egyenletnek viszont nincs megoldása
Abszolútértékes és gyökös kifejezések Megoldások ) Igazolja, hogy az alábbi négy egyenlet közül az a) és b) jelű egyenletnek pontosan egy megoldása van, a c) és d) jelű egyenletnek viszont nincs megoldása
y + a y + b y = r(x),
,") Definíció 1 A másodrendű, állandó együtthatós, lineáris differenciálegyenletek általános alakja y + a y + b y = r(x), ( ) ahol a és b valós számok, r(x) pedig adott függvény. Ha az r(x) függvény az azonosan
Definíció 1 A másodrendű, állandó együtthatós, lineáris differenciálegyenletek általános alakja y + a y + b y = r(x), ( ) ahol a és b valós számok, r(x) pedig adott függvény. Ha az r(x) függvény az azonosan
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Exponenciális és Logaritmikus kifejezések
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Eponenciális és Logaritmikus kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szoálhatnak fontos információval
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Eponenciális és Logaritmikus kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szoálhatnak fontos információval
2.4. Coulomb-súrlódással (száraz súrlódással) csillapított szabad rezgések
 csillapított szabad rezgések") 58. FEJEZET. EGY SZABADSÁGI FOKÚ LENGŐRENDSZEREK.4. Coulomb-súrlódással (száraz súrlódással) csillapított szabad rezgések.4.1. Súrlódási modell A Coulomb-féle súrlódási modellben a súrlódási erő a felületeket
58. FEJEZET. EGY SZABADSÁGI FOKÚ LENGŐRENDSZEREK.4. Coulomb-súrlódással (száraz súrlódással) csillapított szabad rezgések.4.1. Súrlódási modell A Coulomb-féle súrlódási modellben a súrlódási erő a felületeket
λx f 1 (x) e λx f 2 (x) λe λx f 2 (x) + e λx f 2(x) e λx f 2 (x) Hasonlóan általában is elérhető sorműveletekkel, hogy csak f (j)
 e λx f 2 (x) λe λx f 2 (x) + e λx f 2(x) e λx f 2 (x) Hasonlóan általában is elérhető sorműveletekkel, hogy csak f (j)") Matematika A3 gyakorlat Energetika és Mechatronika BSc szakok, 016/17 ősz 10 feladatsor: Magasabbrendű lineáris differenciálegyenletek (megoldás) 1 Határozzuk meg az e λx, xe λx, x e λx,, x k 1 e λx függvények
Matematika A3 gyakorlat Energetika és Mechatronika BSc szakok, 016/17 ősz 10 feladatsor: Magasabbrendű lineáris differenciálegyenletek (megoldás) 1 Határozzuk meg az e λx, xe λx, x e λx,, x k 1 e λx függvények
PÉLDÁK ERŐTÖRVÉNYEKRE
 PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
Magasabbfokú egyenletek
 86 Magasabbfokú egyenletek Magasabbfokú egyenletek 5 90 a) =! ; b) =! ; c) = 5, 9 a) Legyen = y Új egyenletünk: y - 5y+ = 0 Ennek gyökei: y=, y= Tehát egyenletünk gyökei:, =!,, =! b) Új egyenletünk: y
86 Magasabbfokú egyenletek Magasabbfokú egyenletek 5 90 a) =! ; b) =! ; c) = 5, 9 a) Legyen = y Új egyenletünk: y - 5y+ = 0 Ennek gyökei: y=, y= Tehát egyenletünk gyökei:, =!,, =! b) Új egyenletünk: y
L-transzformáltja: G(s) = L{g(t)}.
 = L{g(t)}.") Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Másodfokú egyenletek, egyenlőtlenségek
 Másodfokú egyenletek, egyenlőtlenségek A másodfokú egyenlet grafikus megoldása Példa1. Ábrázold az f(x) = x 1x 16 függvényt, majd olvasd le az ábráról az alábbi egyenlet megoldását: x 1x 16 =. 1. lépés:
Másodfokú egyenletek, egyenlőtlenségek A másodfokú egyenlet grafikus megoldása Példa1. Ábrázold az f(x) = x 1x 16 függvényt, majd olvasd le az ábráról az alábbi egyenlet megoldását: x 1x 16 =. 1. lépés:
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Exponenciális és Logaritmikus kifejezések
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Eponenciális és Logaritmikus kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Eponenciális és Logaritmikus kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos
Differenciálegyenletek megoldása próbafüggvény-módszerrel
 Differenciálegyenletek megoldása próbafüggvény-módszerrel Ez még nem a végleges változat, utoljára módosítva: 2012. április 9.19:38. Elsőrendű egyenletek Legyen adott egy elsőrendű lineáris állandó együtthatós
Differenciálegyenletek megoldása próbafüggvény-módszerrel Ez még nem a végleges változat, utoljára módosítva: 2012. április 9.19:38. Elsőrendű egyenletek Legyen adott egy elsőrendű lineáris állandó együtthatós
a) A logaritmus értelmezése alapján: x 8 0 ( x 2 2 vagy x 2 2) (1 pont) Egy szorzat értéke pontosan akkor 0, ha valamelyik szorzótényező 0.
 A logaritmus értelmezése alapján: x 8 0 ( x 2 2 vagy x 2 2) (1 pont) Egy szorzat értéke pontosan akkor 0, ha valamelyik szorzótényező 0.") MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Abszolútértékes és Gyökös kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Abszolútértékes és Gyökös kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval
9. Trigonometria. I. Nulladik ZH-ban láttuk: 1. Tegye nagyság szerint növekvő sorrendbe az alábbi értékeket! Megoldás:
 9. Trigonometria I. Nulladik ZH-ban láttuk: 1. Tegye nagyság szerint növekvő sorrendbe az alábbi értékeket! x = cos 150 ; y = sin 5 ; z = tg ( 60 ) (A) z < x < y (B) x < y < z (C) y < x < z (D) z < y
9. Trigonometria I. Nulladik ZH-ban láttuk: 1. Tegye nagyság szerint növekvő sorrendbe az alábbi értékeket! x = cos 150 ; y = sin 5 ; z = tg ( 60 ) (A) z < x < y (B) x < y < z (C) y < x < z (D) z < y
Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel
 Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel Segédlet az A végeselem módszer alapjai tárgy 4. laborgyakorlatához http://www.mm.bme.hu/~kossa/vemalap4.pdf Kossa Attila (kossa@mm.bme.hu)
Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel Segédlet az A végeselem módszer alapjai tárgy 4. laborgyakorlatához http://www.mm.bme.hu/~kossa/vemalap4.pdf Kossa Attila (kossa@mm.bme.hu)
cos 2 (2x) 1 dx c) sin(2x)dx c) cos(3x)dx π 4 cos(2x) dx c) 5sin 2 (x)cos(x)dx x3 5 x 4 +11dx arctg 11 (2x) 4x 2 +1 π 4
 1 dx c) sin(2x)dx c) cos(3x)dx π 4 cos(2x) dx c) 5sin 2 (x)cos(x)dx x3 5 x 4 +11dx arctg 11 (2x) 4x 2 +1 π 4") Integrálszámítás I. Végezze el a következő integrálásokat:. α, haα sin() cos() e f) a sin h) () cos ().. 5 4 ( ) e + 4 sin h) (+) sin() sin() cos() + f) 5 i) cos ( +) 7 4. 4 (+) 6 4 cos() 5 +7 5. ( ) sin()cos
Integrálszámítás I. Végezze el a következő integrálásokat:. α, haα sin() cos() e f) a sin h) () cos ().. 5 4 ( ) e + 4 sin h) (+) sin() sin() cos() + f) 5 i) cos ( +) 7 4. 4 (+) 6 4 cos() 5 +7 5. ( ) sin()cos
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Abszolútértékes és Gyökös kifejezések
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Abszolútértékes és Gyökös kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Abszolútértékes és Gyökös kifejezések A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval
Másodfokú egyenletek, egyenlőtlenségek
 Másodfokú egyenletek, egyenlőtlenségek A másodfokú egyenlet grafikus megoldása Példa1. Ábrázold az f(x) = x + 1x + 16 függvényt, majd olvasd le az ábráról az alábbi egyenlet megoldását: x + 1x + 16 = 0.
Másodfokú egyenletek, egyenlőtlenségek A másodfokú egyenlet grafikus megoldása Példa1. Ábrázold az f(x) = x + 1x + 16 függvényt, majd olvasd le az ábráról az alábbi egyenlet megoldását: x + 1x + 16 = 0.
Fourier transzformáció
 a Matematika mérnököknek II. című tárgyhoz Fourier transzformáció Fourier transzformáció, heurisztika Tekintsük egy 2L szerint periodikus függvény Fourier sorát: f (x) = a 0 2 + ( ( nπ ) ( nπ )) a n cos
a Matematika mérnököknek II. című tárgyhoz Fourier transzformáció Fourier transzformáció, heurisztika Tekintsük egy 2L szerint periodikus függvény Fourier sorát: f (x) = a 0 2 + ( ( nπ ) ( nπ )) a n cos
BIOMATEMATIKA ELŐADÁS
 BIOMATEMATIKA ELŐADÁS 6. Differenciálegyenletekről röviden Debreceni Egyetem, 2015 Dr. Bérczes Attila, Bertók Csanád A diasor tartalma 1 Bevezetés 2 Elsőrendű differenciálegyenletek Definíciók Kezdetiérték-probléma
BIOMATEMATIKA ELŐADÁS 6. Differenciálegyenletekről röviden Debreceni Egyetem, 2015 Dr. Bérczes Attila, Bertók Csanád A diasor tartalma 1 Bevezetés 2 Elsőrendű differenciálegyenletek Definíciók Kezdetiérték-probléma
sin x = cos x =? sin x = dx =? dx = cos x =? g) Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!
 Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!") Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Reakciókinetika és katalízis
 Reakciókinetika és katalízis 5. előadás: /22 : Elemi reakciók kapcsolódása. : Egy reaktánsból két külön folyamatban más végtermékek keletkeznek. Legyenek A k b A kc B C Írjuk fel az A fogyására vonatkozó
Reakciókinetika és katalízis 5. előadás: /22 : Elemi reakciók kapcsolódása. : Egy reaktánsból két külön folyamatban más végtermékek keletkeznek. Legyenek A k b A kc B C Írjuk fel az A fogyására vonatkozó
HÁZI FELADATOK. 2. félév. 1. konferencia Komplex számok
 Figyelem! A feladatok megoldása legyen áttekinthet és részletes, de férjen el az arra szánt helyen! Ha valamelyik HÁZI FELADATOK. félév. konferencia Komple számok Értékelés:. egység: önálló feladatmegoldás
Figyelem! A feladatok megoldása legyen áttekinthet és részletes, de férjen el az arra szánt helyen! Ha valamelyik HÁZI FELADATOK. félév. konferencia Komple számok Értékelés:. egység: önálló feladatmegoldás
A mérési eredmény megadása
 A mérési eredmény megadása A mérés során kapott értékek eltérnek a mérendő fizikai mennyiség valódi értékétől. Alapvetően kétféle mérési hibát különböztetünk meg: a determinisztikus és a véletlenszerű
A mérési eredmény megadása A mérés során kapott értékek eltérnek a mérendő fizikai mennyiség valódi értékétől. Alapvetően kétféle mérési hibát különböztetünk meg: a determinisztikus és a véletlenszerű
Eddig csak a polinom x-ben felvett értékét kerestük
 Interpolációs polinom együtthatói Eddig csak a polinom x-ben felvett értékét kerestük Ez jó, ha kevés x-re kell kiértékelni Ha sok ismeretlen f (x)-et keresünk, akkor jobb kiszámolni az együtthatókat,
Interpolációs polinom együtthatói Eddig csak a polinom x-ben felvett értékét kerestük Ez jó, ha kevés x-re kell kiértékelni Ha sok ismeretlen f (x)-et keresünk, akkor jobb kiszámolni az együtthatókat,
Elektromágneses hullámok
 Bevezetés a modern fizika fejezeteibe 2. (a) Elektromágneses hullámok Utolsó módosítás: 2015. október 3. 1 A Maxwell-egyenletek (1) (2) (3) (4) E: elektromos térerősség D: elektromos eltolás H: mágneses
Bevezetés a modern fizika fejezeteibe 2. (a) Elektromágneses hullámok Utolsó módosítás: 2015. október 3. 1 A Maxwell-egyenletek (1) (2) (3) (4) E: elektromos térerősség D: elektromos eltolás H: mágneses
Differenciálegyenletek numerikus integrálása április 9.
 Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Tartalom. Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás
 Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
KOVÁCS BÉLA, MATEMATIKA II.
 KOVÁCS BÉLA MATEmATIkA II 10 X PARCIÁLIS DIFFERENCIÁLEGYENLETEk 1 Elsőrendű kvázilineáris parciális DIFFERENCIÁLEGYENLETEk Elméleti alapok Elsőrendű kvázilineáris parciális differenciálegyenlet általános
KOVÁCS BÉLA MATEmATIkA II 10 X PARCIÁLIS DIFFERENCIÁLEGYENLETEk 1 Elsőrendű kvázilineáris parciális DIFFERENCIÁLEGYENLETEk Elméleti alapok Elsőrendű kvázilineáris parciális differenciálegyenlet általános
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Matematika II képletek. 1 sin xdx =, cos 2 x dx = sh 2 x dx = 1 + x 2 dx = 1 x. cos xdx =,
 Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Matematika II. 1 sin xdx =, 1 cos xdx =, 1 + x 2 dx =
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Hangfrekvenciás mechanikai rezgések vizsgálata
 Hangfrekvenciás mechanikai rezgések vizsgálata (Mérési jegyzőkönyv) Hagymási Imre 2007. május 7. (hétfő délelőtti csoport) 1. Bevezetés Ebben a mérésben a szilárdtestek rugalmas tulajdonságait vizsgáljuk
Hangfrekvenciás mechanikai rezgések vizsgálata (Mérési jegyzőkönyv) Hagymási Imre 2007. május 7. (hétfő délelőtti csoport) 1. Bevezetés Ebben a mérésben a szilárdtestek rugalmas tulajdonságait vizsgáljuk
A Hamilton-Jacobi-egyenlet
 A Hamilton-Jacobi-egyenlet Ha sikerül olyan kanonikus transzformációt találnunk, amely a Hamilton-függvényt zérusra transzformálja akkor valamennyi új koordináta és impulzus állandó lesz: H 0 Q k = H P
A Hamilton-Jacobi-egyenlet Ha sikerül olyan kanonikus transzformációt találnunk, amely a Hamilton-függvényt zérusra transzformálja akkor valamennyi új koordináta és impulzus állandó lesz: H 0 Q k = H P
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Trigonometria
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Trigonometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI EMELT SZINT Trigonometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett
Miskolci Egyetem, Gyártástudományi Intézet, Prof. Dr. Dudás Illés
 3. SÍK FELÜLETEK MEGMUNKÁLÁSA Sík felületek (SF) legtöbbször körrel vagy egyenes alakzatokkal határolt felületként fordulnak elő. A SF-ek legáltalánosabb megmunkálási lehetőségeit a 3.. ábra szemlélteti.
3. SÍK FELÜLETEK MEGMUNKÁLÁSA Sík felületek (SF) legtöbbször körrel vagy egyenes alakzatokkal határolt felületként fordulnak elő. A SF-ek legáltalánosabb megmunkálási lehetőségeit a 3.. ábra szemlélteti.
Feladatok megoldásokkal a harmadik gyakorlathoz (érintési paraméterek, L Hospital szabály, elaszticitás) y = 1 + 2(x 1). y = 2x 1.
 y = 1 + 2(x 1). y = 2x 1.") Feladatok megoldásokkal a harmadik gyakorlathoz (érintési paraméterek, L Hospital szabály, elaszticitás). Feladat. Írjuk fel az f() = függvény 0 = pontbeli érintőjének egyenletét! Az érintő egyenlete y
Feladatok megoldásokkal a harmadik gyakorlathoz (érintési paraméterek, L Hospital szabály, elaszticitás). Feladat. Írjuk fel az f() = függvény 0 = pontbeli érintőjének egyenletét! Az érintő egyenlete y
6. Differenciálegyenletek
 312 6. Differenciálegyenletek 6.1. A differenciálegyenlet fogalma Meghatározni az f függvény F primitív függvényét annyit jelent, mint találni egy olyan F függvényt, amely differenciálható az adott intervallumon
312 6. Differenciálegyenletek 6.1. A differenciálegyenlet fogalma Meghatározni az f függvény F primitív függvényét annyit jelent, mint találni egy olyan F függvényt, amely differenciálható az adott intervallumon
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
2 (j) f(x) dx = 1 arcsin(3x 2) + C. (d) A x + Bx + C 5x (2x 2 + 7) + Hx + I. 2 2x F x + G. x
 f(x) dx = 1 arcsin(3x 2) + C. (d) A x + Bx + C 5x (2x 2 + 7) + Hx + I. 2 2x F x + G. x") I feladatsor Határozza meg az alábbi függvények határozatlan integrálját: a fx dx = x arctg + C b fx dx = arctgx + C c fx dx = 5/x 4 arctg 5 x + C d fx dx = arctg + C 5/ e fx dx = x + arctg + C f fx dx
I feladatsor Határozza meg az alábbi függvények határozatlan integrálját: a fx dx = x arctg + C b fx dx = arctgx + C c fx dx = 5/x 4 arctg 5 x + C d fx dx = arctg + C 5/ e fx dx = x + arctg + C f fx dx
Differenciálegyenletek
 DE 1 Ebben a részben I legyen mindig pozitív hosszúságú intervallum DE Definíció: differenciálegyenlet Ha D n+1 nyílt halmaz, f:d folytonos függvény, akkor az y (n) (x) f ( x, y(x), y'(x),..., y (n-1)
DE 1 Ebben a részben I legyen mindig pozitív hosszúságú intervallum DE Definíció: differenciálegyenlet Ha D n+1 nyílt halmaz, f:d folytonos függvény, akkor az y (n) (x) f ( x, y(x), y'(x),..., y (n-1)
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
Lendület. Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya.
: A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya.") Lendület Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya. Lendülettétel: Az lendület erő hatására változik meg. Az eredő erő határozza meg
Lendület Lendület (impulzus): A test tömegének és sebességének szorzata. vektormennyiség: iránya a sebesség vektor iránya. Lendülettétel: Az lendület erő hatására változik meg. Az eredő erő határozza meg
A képzetes számok az isteni szellem e gyönyörű és csodálatos hordozói már majdnem a lét és nemlét megtestesítői. (Carl Friedrich Gauss)
") Gyakorló feladatok (Ép. matek). Komple számok: A képzetes számok az isteni szellem e gyönyörű és csodálatos hordozói már majdnem a lét és nemlét megtestesítői. (Carl Friedrich Gauss) ) Számítsa ki a következő
Gyakorló feladatok (Ép. matek). Komple számok: A képzetes számok az isteni szellem e gyönyörű és csodálatos hordozói már majdnem a lét és nemlét megtestesítői. (Carl Friedrich Gauss) ) Számítsa ki a következő
Közönséges differenciálegyenletek megoldása Mapleben
 Közönséges differenciálegyenletek megoldása Mapleben Differenciálegyenlet alatt egy olyan egyenletet értünk, amelyben a meghatározandó ismeretlen egy függvény, és az egyenlet tartalmazza az ismeretlen
Közönséges differenciálegyenletek megoldása Mapleben Differenciálegyenlet alatt egy olyan egyenletet értünk, amelyben a meghatározandó ismeretlen egy függvény, és az egyenlet tartalmazza az ismeretlen
Matematikai háttér. 3. Fejezet. A matematika hozzászoktatja a szemünket ahhoz, hogy tisztán és világosan lássa az igazságot.
 3. Fejezet Matematikai háttér A matematika hozzászoktatja a szemünket ahhoz, hogy tisztán és világosan lássa az igazságot René Descartes Számtalan kiváló szakirodalom foglalkozik a különféle differenciálegyenletek
3. Fejezet Matematikai háttér A matematika hozzászoktatja a szemünket ahhoz, hogy tisztán és világosan lássa az igazságot René Descartes Számtalan kiváló szakirodalom foglalkozik a különféle differenciálegyenletek
Bevezetés a modern fizika fejezeteibe. 1.(a) Rugalmas hullámok. Utolsó módosítás: szeptember 28. Dr. Márkus Ferenc BME Fizika Tanszék
 Rugalmas hullámok. Utolsó módosítás: szeptember 28. Dr. Márkus Ferenc BME Fizika Tanszék") Bevezetés a modern fizika fejezeteibe 1.(a) Rugalmas hullámok Utolsó módosítás: 2012. szeptember 28. 1 A deformálható testek mozgása (1) A Helmholtz-féle kinematikai alaptétel: A deformálható test elegendően
Bevezetés a modern fizika fejezeteibe 1.(a) Rugalmas hullámok Utolsó módosítás: 2012. szeptember 28. 1 A deformálható testek mozgása (1) A Helmholtz-féle kinematikai alaptétel: A deformálható test elegendően
M. 33. Határozza meg az összes olyan kétjegyű szám összegét, amelyek 4-gyel osztva maradékul 3-at adnak!
 Magyar Ifjúság 6 V SOROZATOK a) Három szám összege 76 E három számot tekinthetjük egy mértani sorozat három egymás után következő elemének vagy pedig egy számtani sorozat első, negyedik és hatodik elemének
Magyar Ifjúság 6 V SOROZATOK a) Három szám összege 76 E három számot tekinthetjük egy mértani sorozat három egymás után következő elemének vagy pedig egy számtani sorozat első, negyedik és hatodik elemének
Tartalom. 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció)
") Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Lineáris egyenletrendszerek
 Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
Oktatási Hivatal. 1 pont. A feltételek alapján felírhatók az. összevonás után az. 1 pont
 Oktatási Hivatal Öt pozitív egész szám egy számtani sorozat első öt eleme A sorozatnak a különbsége prímszám Tudjuk hogy az első négy szám köbének összege megegyezik az ezen öt tag közül vett páros sorszámú
Oktatási Hivatal Öt pozitív egész szám egy számtani sorozat első öt eleme A sorozatnak a különbsége prímszám Tudjuk hogy az első négy szám köbének összege megegyezik az ezen öt tag közül vett páros sorszámú
First Prev Next Last Go Back Full Screen Close Quit. Matematika I
 Matematika I (Analízis) Készítette: Horváth Gábor Kötelező irodalom: Ács László, Gáspár Csaba: Analízis 1 Oktatási segédanyagok és a tantárgyi követelményrendszer megtalálható a http://rs1.szif.hu/ horvathg/horvathg.html
Matematika I (Analízis) Készítette: Horváth Gábor Kötelező irodalom: Ács László, Gáspár Csaba: Analízis 1 Oktatási segédanyagok és a tantárgyi követelményrendszer megtalálható a http://rs1.szif.hu/ horvathg/horvathg.html
A brachistochron probléma megoldása
 A brachistochron probléma megoldása Adott a függőleges síkban két nem egy függőleges egyenesen fekvő P 0 és P 1 pont, amelyek közül a P 1 fekszik alacsonyabban. Azt a kérdést fogjuk vizsgálni. hogy van-e
A brachistochron probléma megoldása Adott a függőleges síkban két nem egy függőleges egyenesen fekvő P 0 és P 1 pont, amelyek közül a P 1 fekszik alacsonyabban. Azt a kérdést fogjuk vizsgálni. hogy van-e
ALGEBRAI KIFEJEZÉSEK, EGYENLETEK
 ALGEBRAI KIFEJEZÉSEK, EGYENLETEK AZ ALGEBRAI KIFEJEZÉS FOGALMÁNAK KIALAKÍTÁSA (7-9. OSZTÁLY) Racionális algebrai kifejezés (betűs kifejezés): betűket és számokat a négy alapművelet véges sokszori alkalmazásával
ALGEBRAI KIFEJEZÉSEK, EGYENLETEK AZ ALGEBRAI KIFEJEZÉS FOGALMÁNAK KIALAKÍTÁSA (7-9. OSZTÁLY) Racionális algebrai kifejezés (betűs kifejezés): betűket és számokat a négy alapművelet véges sokszori alkalmazásával
Abszolútértékes egyenlôtlenségek
 Abszolútértékes egyenlôtlenségek 575. a) $, $ ; b) < - vagy $, # - vagy > 4. 5 576. a) =, =- 6, 5 =, =-, 7 =, 4 = 5; b) nincs megoldás;! c), = - ; d) =-. Abszolútértékes egyenlôtlenségek 577. a) - # #,
Abszolútértékes egyenlôtlenségek 575. a) $, $ ; b) < - vagy $, # - vagy > 4. 5 576. a) =, =- 6, 5 =, =-, 7 =, 4 = 5; b) nincs megoldás;! c), = - ; d) =-. Abszolútértékes egyenlôtlenségek 577. a) - # #,
Bevezetés a modern fizika fejezeteibe. 4. (b) Kvantummechanika. Utolsó módosítás: 2013. november 9. Dr. Márkus Ferenc BME Fizika Tanszék
 Kvantummechanika. Utolsó módosítás: 2013. november 9. Dr. Márkus Ferenc BME Fizika Tanszék") Bevezetés a modern fizika fejezeteibe 4. (b) Kvantummechanika Utolsó módosítás: 2013. november 9. 1 A legkisebb hatás elve (1) A legkisebb hatás elve (Hamilton-elv): S: a hatás L: Lagrange-függvény 2 A
Bevezetés a modern fizika fejezeteibe 4. (b) Kvantummechanika Utolsó módosítás: 2013. november 9. 1 A legkisebb hatás elve (1) A legkisebb hatás elve (Hamilton-elv): S: a hatás L: Lagrange-függvény 2 A
Hatványsorok, Fourier sorok
 a Matematika mérnököknek II. című tárgyhoz Hatványsorok, Fourier sorok Hatványsorok, Taylor sorok Közismert, hogy ha 1 < x < 1 akkor 1 + x + x 2 + x 3 + = n=0 x n = 1 1 x. Az egyenlet baloldalán álló kifejezés
a Matematika mérnököknek II. című tárgyhoz Hatványsorok, Fourier sorok Hatványsorok, Taylor sorok Közismert, hogy ha 1 < x < 1 akkor 1 + x + x 2 + x 3 + = n=0 x n = 1 1 x. Az egyenlet baloldalán álló kifejezés
1. zárthelyi,
 1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
Egyenletek, egyenlőtlenségek X.
 Egyenletek, egyenlőtlenségek X. DEFINÍCIÓ: (Logaritmus) Ha egy pozitív valós számot adott, 1 - től különböző pozitív alapú hatvány alakban írunk fel, akkor ennek a hatványnak a kitevőjét logaritmusnak
Egyenletek, egyenlőtlenségek X. DEFINÍCIÓ: (Logaritmus) Ha egy pozitív valós számot adott, 1 - től különböző pozitív alapú hatvány alakban írunk fel, akkor ennek a hatványnak a kitevőjét logaritmusnak