Eddig csak a polinom x-ben felvett értékét kerestük
|
|
|
- Zoltán Székely
- 6 évvel ezelőtt
- Látták:
Átírás
1 Interpolációs polinom együtthatói Eddig csak a polinom x-ben felvett értékét kerestük Ez jó, ha kevés x-re kell kiértékelni Ha sok ismeretlen f (x)-et keresünk, akkor jobb kiszámolni az együtthatókat, majd behelyettesíteni a polinomba. Adottak az x 1, x 2,..., x N pontok és y 1 = f (x 1 ), y 2 = f (x 2 ),..., y N = f (x N ) pontokban felvett értékek, ezeket szeretnénk polinommal interpolálni. Nem illesztés, tehát a polinomnak az összes (x i, y i ) ponton át kell mennie Írjuk fel az egyenletet Polinom fokszáma: N 1, ahol N a pontok száma.
2 Egyenletrendszer a polinom c i együtthatóira y 1 = c 1 + c 2 x 1 + c 3 x c Nx N 1 1 y 2 = c 1 + c 2 x 2 + c 3 x c Nx N 1 2. y N = c 1 + c 2 x N + c 3 x 2 N c Nx N 1 N Ezt kell megoldani a c i polinom-együtthatókra. x i -k ismertek. Vegyük észre, hogy az x i -k hatványaiból alkotott mátrix speciális (Vandermonde-mátrix)! Erre létezik majd speciális megoldó módszer.
3 Az együtthatókra feĺırt egyenletrendszer megoldása A Vandermonde-mátrixokra létező speciális eljárás gyors: O(N) A Vandermonde-mátrixok többnyire numerikusan problémásak Ha z gyors módszer instabil lenne, akkor használható lassabb megoldó is. A polinom x pontban felvett értéke a korábbi iteratív módszer szerint meghatározható a polinom együtthatóinak kiszámítása nélkül is, és az a módszer stabil.
4 Polinom együtthatóinak iteratív meghatározása Az együtthatókat meghatározhatjuk a korábbi iteratív módszer segítségével is: Az iteratív módszer ugyan csak egy adott x pontban adja meg az interpolált eredményt, de válaszuk x-et x = 0-nak. Ekkor a polinom értéke pontosan c 0. Vonjuk le az összes y i -ből c 0 -t, osszuk le az egyenletrendszer sorait a megfelelő x i -kkel, majd dobjunk el egy (x i, y i ) pontot. Tetszőleges pont eldobható, de a legkisebb x i mindig jó választás. Ekkor hasonló problémára jutunk, csak eggyel csökkent az ismeretlenek száma. A módszer addig folytatandó, míg az összes c i -t ki nem számoltuk. Ez a módszer stabil, de végigcsinálva kiderül, hogy O(N 3 )-ös.
5 Példa numerikus problémákra polinomok kapcsán. Együtthatók: c 0 = c 1 = c 2 = c 3 = c 4 = c 5 = c 6 = c 7 = c 8 = c 9 = c 10 = A nagyobb hatványokhoz egyre nagyobb, egymást sokszor pont kiejtő együtthatók tartoznak. Ez teszi a magas rendű polinomokon alapuló interpolációt nagyon instabillá.
6 Interpoláció és extrapoláció racionális függvényekkel Racionális függvény: két polinom hányadosa. R (i)(i+1)...(i+m) = P µ(x) Q ν (x) = p 0 + p 1 x + p 2 x p µ x µ q 0 + q 1 x + q 2 x q ν x ν Összesen µ + ν + 1 ismeretlen van A +1 onnan jön, hogy két konstans tag van ugyan, de a számlálót és a nevezőt is ugyanazzal a számmal osztva az egyik 1-gyé tehető. Összesen m + 1 pontunk van Ha meg akarjuk tudni oldani az egyenletrendszert, akkor az m + 1 = µ + ν + 1 feltételt teljesíteni kell
7 Miért jobbak a racionális függvények a polinomoknál? Ha az interpolálandó függvénynek pólusai vannak Adott x i értékeknél a függvény divergál Ekkor Q ν (x) ott zérus lesz A polinomok ilyet nem tudnak Előfordulhat, hogy magának a függvénynek nincsen pólusa a valós számok mentén, de a komplex síkon igen. A polinomok ilyenkor is rosszul viselkednek Ok: ugyanaz, amiért a hatványsorok is nagyon rosszul konvergálnak ilyen esetekben. Ezek nem feltétlen különleges függvények!
8 Példa komplex pólussal rendelkező függvényre f (x) = 1 x
9 Lineáris interpoláció még egyszer Két pont közötti legegyszerűbb interpolációs függvény az egyenes: ahol y = Ay j + By j+1, A = x j+1 x x j+1 x j B = 1 A = x x j x j+1 x j Ezek amúgy a korábbi bonyolult Lagrange-formulák a legegyszerűbb polinom esetére, de kijön az egyenes egyenletéből is: y = y j + (x x j ) y j+1 y j x j+1 x j Probléma: A második deriváltja ugyan két pont között nulla, de az x j pontokban nem meghatározott (vagy végtelen)
10 Köbös spline Előírjuk, hogy az ismert x j pontokban az interpoláló f függvény sima legyen, azaz létezzen a második deriváltja, és az legyen folytonos ebből következik, hogy az első deriváltja is folytonos f A f B f C
11 Köbös spline: feltételek a deriváltakra Az x i pontban a következő feltételek írhatók fel: y A (x j ) = y B (x j ) = y i f A (x j) = f B (x j) ( f A (x j) = f B (x j) ) További feltételeket kapunk y A -ra és y B -re az x j 1, x j illetve az x j+1 pontokban Összesen szakaszonként 4-4 egyenlet: harmadfokú spline-t szeretnénk Ezekből közvetlenül nem szemléletes kihozni egyenleteket a spline-ra.
12 Spline egyenleteinek származtatása Tegyük fel, hogy nem csak y j -t, hanem y j -t, azaz a második deriváltakat is ismerjük minden pontban. Így minden szakaszra négy lineáris egyenletet kapunk Bízunk benne, hogy lesz megoldásuk Keressük az interpolációs függvényt x j és x j+1 között a következő alakban: y = Ay j + By j+1 + Cy j + Dy j+1, ahol A, B, C és D az x j és x j+1 legfeljebb harmad rendű polinomja.
13 Megoldás harmadfokú spline-okra A harmadfokú spline formulája: ahol a korábbiak, továbbá y = Ay j + By j+1 + Cy j + Dy j+1, A = x j+1 x x j+1 x j B = 1 A = x x j x j+1 x j C = 1 6 (A3 A)(x j+1 x j ) 2 D = 1 6 (B3 B)(x j+1 x j ) 2 Erről belátható, hogy kielégíti a korábbi feltételeket, viszont y j -k most még tetszőlegesek.
14 Spline együtthatók meghatározása Ha N az illesztendő pontok száma, akkor az y j -kra adódó egyenletrendszer is N ismeretlenes. Megköveteljük, hogy minden pontban megegyezzenek a mindkét oldali második deriváltak. Így kapunk N 2 egyenletet a N ismeretlenre. A két szélső pontban a deriváltak értéke szabadon megadható, legyen mondjuk 0. x j x j 1 y 6 j 1+ x j+1 x j 1 3 y j + x j+1 x j 6 y 1 = y N = 0 y j+1 = y j+1 y j x j+1 x j y j y j 1 x j x j 1
15 Az egyenletrendszer megoldása Az egyenlet megoldása O(N) műveletet igényel Nem csak lineáris, de a feĺırt mátrix tridiagonális csak a főátlóban és a közvetlenül mellette levő átlóban vannak elemek, hiszen minden egyenletben csak y j 1, y j és y j+1 szerepel.
16 Tridiagonális egyenletrendszer Az alábbi egyenletben x i -k ismeretlenek. b 1 c a 2 b 2 c a 3 b 3 c a N 1 b N 1 c N a N b N x 1 x 2 x 3... x N 1 x N = y 1 y 2 y 3... y N 1 y N Megoldási javaslat: LU dekompozíció Maga a dekompozíció és a visszahelyettesítés is összesen O(N) műveletet igényel. Nem kell az egész N N mátrixot tárolni, elég a három átlót három tömbben. Emiatt sok-sok pontra is megoldható. a 1 és c N nem szerepel az egyenletben.
17 A spline-ok jobbak, mint a polinomok polinom köbös spline A pontok között a köbös spline jól viselkedik Extrapolációra ez sem sokkal jobb
18 Interpoláció több dimenzióban, rácson, rács nélkül Csak két dimenziót tárgyalunk, magasabb dimenziókra általánosítható. Szabályos rácson: Az ismert (x, y) i pontok lehetnek egy szabályos rácson. Ekkor a pontok indexelhetők x i, y j módon is. 1 i M, 1 j N Szabályos rács: két vektor definiálja, de nem muszáj, hogy négyzetrács legyen. Ha az ismert pontok elszórtan helyezkednek el: Bonyolultabb az interpoláció Ponthármasok által alkotott háromszögeken kell dolgozni Delaunay-háromszögelés, ld. később
19 Interpoláció több dimenzióban rácson Egy dimenzióban: A legegyszerűbb interpoláció: lineáris Két pont között mindig húzható egyenes Két dimenzióban: A rács egy celláját négy pont definiálja Ezeken át általában nem fektethető sík Essünk neki rögtön magasabb rendű görbékkel? Dolgozzunk mindig háromszögekkel?
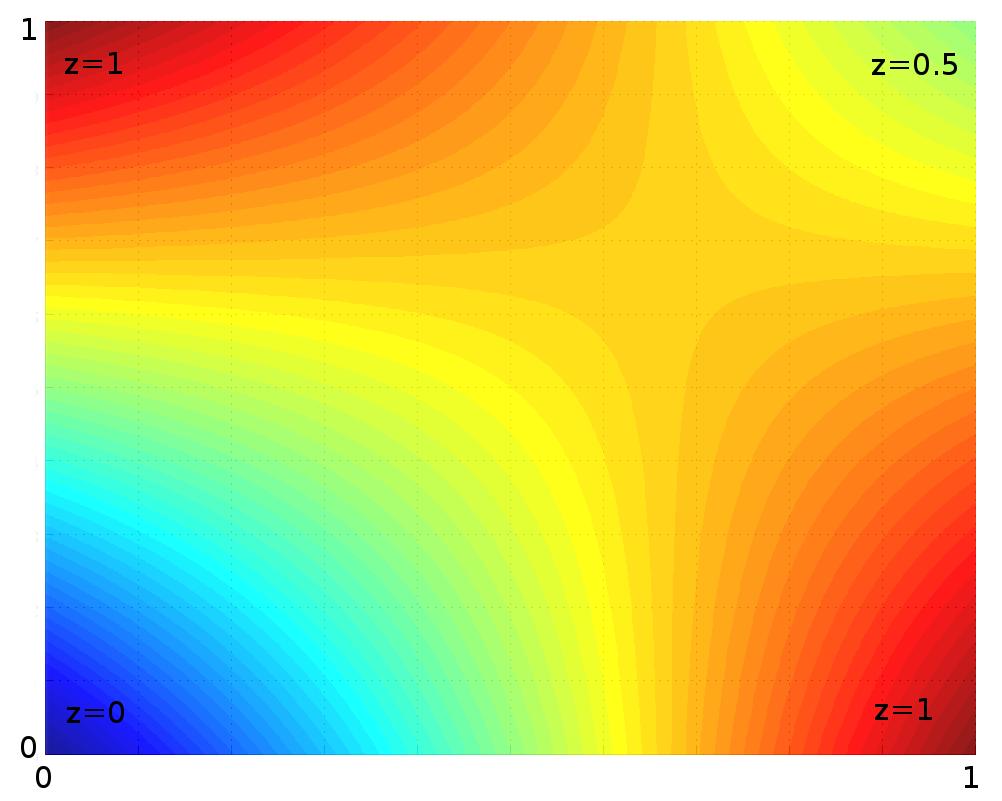
20 Interpolálás rácson, koordináták mentén Ismertek az (x i, y j ) pontpárok egy rácson és a z(x i, y j ) értékek. Az (x, y) pontban a függvény értéke ismeretlen, viszont tudjuk, hogy x i < x < x i+1 és y i < y < y i+1 Visszavezetjük a problémát a lineáris esetre: Interpoláljunk először az egyik index szerint: z(x, y i )-t becsüljük z(x i, y i ) és z(x i+1, y i )-ből, és z(x, y i+1 )-t becsüljük z(x i, y i+1 ) és z(x i+1, y i+1 )-ből. Majd a másik irányban: z(x, y)-t becsüljük z(x, y i ) és z(x, y i+1 )-ből Jól újrahasznosíthatók az egy dimenziós módszerek Módszertől függően az eredmény függhet az irányok sorrendjétől
21 Interpoláció rácson, koordináták mentén
22 Interpoláció rácson, koordináták mentén
23 Interpoláció rácson, koordináták mentén
24 Interpoláció rácson, koordináták mentén
25 Interpoláció rácson, koordináták mentén
26 Interpoláció rácson, koordináták mentén
27 Bilineáris interpoláció Nézzük, hogy (x, y) hogyan viszonyul az öt bekeretező négy pont koordinátáihoz: t = x x i x i+1 x i u = y y j y j+1 y j Ebből a függvény interpolált z(x, y) értéke: z(x, y) = (1 t)(1 u)z ij + t(1 u)z (i+1)j + + (1 t)uz i(j+1) + tuz (i+1)(j+1) Ez lineáris kifejezés, de a síknál általánosabb Nyeregfelület is lehet
28 Bilineáris interpoláció
29 Bilineáris interpoláció
30 Ke p interpola la sa bilinea ris interpola cio val
31 Interpoláció két dimenzióban spline-okkal A bilineáris interpoláció folytonos felületet ad, de nem sima. Használhatunk köbös spline-okat, de Nem elegendő megkövetelni a második deriváltak azonosságát az ismert pontokban Itt most parciális deriváltak vannak Ki kell róni feltételeket az első deriváltakra és a vegyes deriváltakra is Minden pontban szükséges a deriváltak explicit megadása: z x, z y, 2 z x y, 2 z x 2, 2 z y 2 A deriváltak értékétől függetlenül a felület sima lesz, de nem garantált, hogy jól közeĺıti a függvényt

32 Ke p interpola la sa bicubic spline interpola cio val
33 Interpoláció szétszórt pontok esetén Most a pontok már nem rácson helyezkednek el korábban egy x pont körül éppen négy környező pont bolt a környező pontok itt nem jól definiáltak a bilineáris és spline módszerek nem működnek Ötlet egy lehetséges megoldásra: Minden pontból húzzunk szakaszokat a környező pontokba úgy, hogy háromszögeket kapjunk Van olyan háromszögelés (trianguláció), ami egyértelmű Interpoláljuk a függvény értékét a háromszögön felvett értékével
34 Delaunay-trianguláció
35 Delaunay-trianguláció definíciója Úgy rajzoljuk be a háromszögeket, hogy egyik x i se essen háromszög köré írt körön belülre. Ekkor a háromszögelés egyértelmű.
36 Voronoi-csempézés Ha tekintjük a körül írt körök középpontját, akkor azok megadják az ún. Voronoi-csempézés (vagy cellázás) csomópontjait
Diszkréten mintavételezett függvények
 Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Lineáris algebra numerikus módszerei
 Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Polinomok, Lagrange interpoláció
 Közelítő és szimbolikus számítások 8. gyakorlat Polinomok, Lagrange interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Polinomok
Közelítő és szimbolikus számítások 8. gyakorlat Polinomok, Lagrange interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Polinomok
Bevezetés az algebrába 2
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Mátrixfüggvények H607 2018-05-02 Wettl Ferenc
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Mátrixfüggvények H607 2018-05-02 Wettl Ferenc
MÉSZÁROS JÓZSEFNÉ, NUMERIKUS MÓDSZEREK
 MÉSZÁROS JÓZSEFNÉ, NUmERIKUS módszerek 9 FÜGGVÉNYKÖZELÍTÉSEK IX. SPLINE INTERPOLÁCIÓ 1. SPLINE FÜGGVÉNYEK A Lagrange interpolációnál említettük, hogy az ún. globális interpoláció helyett gyakran célszerű
MÉSZÁROS JÓZSEFNÉ, NUmERIKUS módszerek 9 FÜGGVÉNYKÖZELÍTÉSEK IX. SPLINE INTERPOLÁCIÓ 1. SPLINE FÜGGVÉNYEK A Lagrange interpolációnál említettük, hogy az ún. globális interpoláció helyett gyakran célszerű
GPK M1 (BME) Interpoláció / 16
 Interpoláció / 16") Interpoláció Matematika M1 gépészmérnököknek 2017. március 13. GPK M1 (BME) Interpoláció 2017 1 / 16 Az interpoláció alapfeladata - Példa Tegyük fel, hogy egy ipari termék - pl. autó - előzetes konstrukciójának
Interpoláció Matematika M1 gépészmérnököknek 2017. március 13. GPK M1 (BME) Interpoláció 2017 1 / 16 Az interpoláció alapfeladata - Példa Tegyük fel, hogy egy ipari termék - pl. autó - előzetes konstrukciójának
Gauss-Jordan módszer Legkisebb négyzetek módszere, egyenes LNM, polinom LNM, függvény. Lineáris algebra numerikus módszerei
 A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
Numerikus módszerek II. zárthelyi dolgozat, megoldások, 2014/15. I. félév, A. csoport. x 2. c = 3 5, s = 4
 Numerikus módszerek II. zárthelyi dolgozat, megoldások, 204/5. I. félév, A. csoport. Feladat. (6p) Alkalmas módon választva egy Givens-forgatást, határozzuk meg az A mátrix QR-felbontását! Oldjuk meg ennek
Numerikus módszerek II. zárthelyi dolgozat, megoldások, 204/5. I. félév, A. csoport. Feladat. (6p) Alkalmas módon választva egy Givens-forgatást, határozzuk meg az A mátrix QR-felbontását! Oldjuk meg ennek
Numerikus integrálás április 20.
 Numerikus integrálás 2017. április 20. Integrálás A deriválás papíron is automatikusan elvégezhető feladat. Az analitikus integrálás ezzel szemben problémás vannak szabályok, de nem minden integrálható
Numerikus integrálás 2017. április 20. Integrálás A deriválás papíron is automatikusan elvégezhető feladat. Az analitikus integrálás ezzel szemben problémás vannak szabályok, de nem minden integrálható
1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1
![1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1](/thumbs/88/116339870.jpg "1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1") numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
Nemlineáris egyenletrendszerek megoldása április 15.
 Nemlineáris egyenletrendszerek megoldása 2014. április 15. Nemlineáris egyenletrendszerek Az egyenletrendszer a következő formában adott: f i (x 1, x 2,..., x M ) = 0 i = 1...N az f i függvények az x j
Nemlineáris egyenletrendszerek megoldása 2014. április 15. Nemlineáris egyenletrendszerek Az egyenletrendszer a következő formában adott: f i (x 1, x 2,..., x M ) = 0 i = 1...N az f i függvények az x j
Egyenletek, egyenlőtlenségek VII.
 Egyenletek, egyenlőtlenségek VII. Magasabbfokú egyenletek: A 3, vagy annál nagyobb fokú egyenleteket magasabb fokú egyenleteknek nevezzük. Megjegyzés: Egy n - ed fokú egyenletnek legfeljebb n darab valós
Egyenletek, egyenlőtlenségek VII. Magasabbfokú egyenletek: A 3, vagy annál nagyobb fokú egyenleteket magasabb fokú egyenleteknek nevezzük. Megjegyzés: Egy n - ed fokú egyenletnek legfeljebb n darab valós
Hajder Levente 2018/2019. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 Törtvonal Felületi folytonosságok B-spline Spline variánsok Felosztott (subdivision) görbék
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 Törtvonal Felületi folytonosságok B-spline Spline variánsok Felosztott (subdivision) görbék
LNM folytonos Az interpoláció Lagrange interpoláció. Lineáris algebra numerikus módszerei
 Legkisebb négyzetek módszere, folytonos eset Folytonos eset Legyen f C[a, b]és h(x) = a 1 φ 1 (x) + a 2 φ 2 (x) +... + a n φ n (x). Ekkor tehát az n 2 F (a 1,..., a n ) = f a i φ i = = b a i=1 f (x) 2
Legkisebb négyzetek módszere, folytonos eset Folytonos eset Legyen f C[a, b]és h(x) = a 1 φ 1 (x) + a 2 φ 2 (x) +... + a n φ n (x). Ekkor tehát az n 2 F (a 1,..., a n ) = f a i φ i = = b a i=1 f (x) 2
1 Lebegőpontos számábrázolás
 Tartalom 1 Lebegőpontos számábrázolás... 2 2 Vektornormák... 4 3 Indukált mátrixnormák és tulajdonságaik... 5 4 A lineáris rendszer jobboldala hibás... 6 5 A kondíciószám és tulajdonságai... 7 6 Perturbációs
Tartalom 1 Lebegőpontos számábrázolás... 2 2 Vektornormák... 4 3 Indukált mátrixnormák és tulajdonságaik... 5 4 A lineáris rendszer jobboldala hibás... 6 5 A kondíciószám és tulajdonságai... 7 6 Perturbációs
Numerikus integrálás április 18.
 Numerikus integrálás 2016. április 18. Integrálás A deriválás papíron is automatikusan elvégezhető feladat. Az analitikus integrálás ezzel szemben problémás vannak szabályok, de nem minden integrálható
Numerikus integrálás 2016. április 18. Integrálás A deriválás papíron is automatikusan elvégezhető feladat. Az analitikus integrálás ezzel szemben problémás vannak szabályok, de nem minden integrálható
Legkisebb négyzetek módszere, Spline interpoláció
 Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
Gyakorló feladatok. Agbeko Kwami Nutefe és Nagy Noémi
 Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Differenciálegyenletek megoldása próbafüggvény-módszerrel
 Differenciálegyenletek megoldása próbafüggvény-módszerrel Ez még nem a végleges változat, utoljára módosítva: 2012. április 9.19:38. Elsőrendű egyenletek Legyen adott egy elsőrendű lineáris állandó együtthatós
Differenciálegyenletek megoldása próbafüggvény-módszerrel Ez még nem a végleges változat, utoljára módosítva: 2012. április 9.19:38. Elsőrendű egyenletek Legyen adott egy elsőrendű lineáris állandó együtthatós
Szendrői Balázs: Algebrai síkgörbék, szerkesztette: Ádám Liliána, Ódor Gergő, Lajos Mátyás
 Algebrai síkgörbék Algebrai síkgörbéknek az olyan görbéket nevezzük, amelyek pontjai egy kétváltozós polinommal jellemezhetők. Ilyenek az egyenesek (ezek az elsőfokú síkgörbék). Másodfokú síkgörbék: pl.
Algebrai síkgörbék Algebrai síkgörbéknek az olyan görbéket nevezzük, amelyek pontjai egy kétváltozós polinommal jellemezhetők. Ilyenek az egyenesek (ezek az elsőfokú síkgörbék). Másodfokú síkgörbék: pl.
15. LINEÁRIS EGYENLETRENDSZEREK
 15 LINEÁRIS EGYENLETRENDSZEREK 151 Lineáris egyenletrendszer, Gauss elimináció 1 Definíció Lineáris egyenletrendszernek nevezzük az (1) a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
15 LINEÁRIS EGYENLETRENDSZEREK 151 Lineáris egyenletrendszer, Gauss elimináció 1 Definíció Lineáris egyenletrendszernek nevezzük az (1) a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
1. Generátorrendszer. Házi feladat (fizikából tudjuk) Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak
 Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak") 1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
Intergrált Intenzív Matematika Érettségi
 . Adott a mátri, determináns determináns, ahol,, d Számítsd ki:. b) Igazold, hogy a b c. Adott a az 6 0 egyenlet megoldásai. a). c) Számítsd ki a d determináns értékét. d c a b determináns, ahol abc,,.
. Adott a mátri, determináns determináns, ahol,, d Számítsd ki:. b) Igazold, hogy a b c. Adott a az 6 0 egyenlet megoldásai. a). c) Számítsd ki a d determináns értékét. d c a b determináns, ahol abc,,.
Végeselem modellezés alapjai 1. óra
 Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Határozatlan integrál (2) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Határozatlan integrál () First Prev Next Last Go Back Full Screen Close Quit 1. Az összetett függvények integrálására szolgáló egyik módszer a helyettesítéssel való integrálás. Az idevonatkozó tétel pontos
Határozatlan integrál () First Prev Next Last Go Back Full Screen Close Quit 1. Az összetett függvények integrálására szolgáló egyik módszer a helyettesítéssel való integrálás. Az idevonatkozó tétel pontos
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Egy általános iskolai feladat egyetemi megvilágításban
 Egy általános iskolai feladat egyetemi megvilágításban avagy mit kell(ene) tudnia egy 8.-osnak a matematika versenyeken Kunos Ádám Középiskolás pályázat díjkiosztó SZTE Bolyai Intézet 2011. november 12.
Egy általános iskolai feladat egyetemi megvilágításban avagy mit kell(ene) tudnia egy 8.-osnak a matematika versenyeken Kunos Ádám Középiskolás pályázat díjkiosztó SZTE Bolyai Intézet 2011. november 12.
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Lineáris egyenletrendszerek
 Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
VEKTORTEREK I. VEKTORTÉR, ALTÉR, GENERÁTORRENDSZER október 15. Irodalom. További ajánlott feladatok
 VEKTORTEREK I. VEKTORTÉR, ALTÉR, GENERÁTORRENDSZER 2004. október 15. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak az előadáson, másrészt megtalálják
VEKTORTEREK I. VEKTORTÉR, ALTÉR, GENERÁTORRENDSZER 2004. október 15. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak az előadáson, másrészt megtalálják
Mátrixfüggvények. Wettl Ferenc április 28. Wettl Ferenc Mátrixfüggvények április / 22
 Mátrixfüggvények Wettl Ferenc 2016. április 28. Wettl Ferenc Mátrixfüggvények 2016. április 28. 1 / 22 Tartalom 1 Diagonalizálható mátrixok függvényei 2 Mátrixfüggvény a Jordan-alakból 3 Mátrixfüggvény
Mátrixfüggvények Wettl Ferenc 2016. április 28. Wettl Ferenc Mátrixfüggvények 2016. április 28. 1 / 22 Tartalom 1 Diagonalizálható mátrixok függvényei 2 Mátrixfüggvény a Jordan-alakból 3 Mátrixfüggvény
1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás)
") Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Megoldott feladatok november 30. n+3 szigorúan monoton csökken, 5. n+3. lim a n = lim. n+3 = 2n+3 n+4 2n+1
 Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
valós számot tartalmaz, mert az ilyen részhalmazon nem azonosság.
 2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
Normák, kondíciószám
 Normák, kondíciószám A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris egyenletrendszerek Nagyon sok probléma közvetlenül lineáris egyenletrendszer megoldásával kezelhetı Sok numerikus
Normák, kondíciószám A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris egyenletrendszerek Nagyon sok probléma közvetlenül lineáris egyenletrendszer megoldásával kezelhetı Sok numerikus
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
Numerikus integrálás
 Közelítő és szimbolikus számítások 11. gyakorlat Numerikus integrálás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Határozatlan integrál
Közelítő és szimbolikus számítások 11. gyakorlat Numerikus integrálás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Határozatlan integrál
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
9. Előadás. Megyesi László: Lineáris algebra, oldal. 9. előadás Mátrix inverze, mátrixegyenlet
 9. Előadás Megyesi László: Lineáris algebra, 75. 84. oldal. Gondolkodnivalók Mátrix rangja 1. Gondolkodnivaló Határozzuk meg a p valós paraméter értékétől függően a következő mátrix rangját: p 3 1 2 2
9. Előadás Megyesi László: Lineáris algebra, 75. 84. oldal. Gondolkodnivalók Mátrix rangja 1. Gondolkodnivaló Határozzuk meg a p valós paraméter értékétől függően a következő mátrix rangját: p 3 1 2 2
Digitális Domborzat Modellek (DTM)
") Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) DTM fogalma A földfelszín számítógéppel kezelhető topográfiai modellje Cél: tetszőleges pontban
Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) DTM fogalma A földfelszín számítógéppel kezelhető topográfiai modellje Cél: tetszőleges pontban
Lineáris algebra 2. Filip Ferdinánd december 7. siva.banki.hu/jegyzetek
 Lineáris algebra 2 Filip Ferdinánd filipferdinand@bgkuni-obudahu sivabankihu/jegyzetek 2015 december 7 Filip Ferdinánd 2016 februar 9 Lineáris algebra 2 1 / 37 Az el adás vázlata Determináns Determináns
Lineáris algebra 2 Filip Ferdinánd filipferdinand@bgkuni-obudahu sivabankihu/jegyzetek 2015 december 7 Filip Ferdinánd 2016 februar 9 Lineáris algebra 2 1 / 37 Az el adás vázlata Determináns Determináns
Saj at ert ek-probl em ak febru ar 26.
 Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Numerikus matematika vizsga
 1. Az a = 2, t = 4, k = 3, k + = 2 számábrázolási jellemzők mellett hány pozitív, normalizált lebegőpontos szám ábrázolható? Adja meg a legnagyobb ábrázolható számot! Mi lesz a 0.8-hoz rendelt lebegőpontos
1. Az a = 2, t = 4, k = 3, k + = 2 számábrázolási jellemzők mellett hány pozitív, normalizált lebegőpontos szám ábrázolható? Adja meg a legnagyobb ábrázolható számot! Mi lesz a 0.8-hoz rendelt lebegőpontos
Feladat: megoldani az alábbi egyenletrendszert: A x = b,
 Gauss Jordan-elimináció Feladat: megoldani az alábbi egyenletrendszert: ahol A négyzetes mátrix. A x = b, A Gauss Jordan-elimináció tulajdonképpen az általános iskolában tanult módszer lineáris egyenletrendszerek
Gauss Jordan-elimináció Feladat: megoldani az alábbi egyenletrendszert: ahol A négyzetes mátrix. A x = b, A Gauss Jordan-elimináció tulajdonképpen az általános iskolában tanult módszer lineáris egyenletrendszerek
Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek
 Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E
Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E
3. Lineáris differenciálegyenletek
 3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Emelt szintű érettségi feladatsorok és megoldásaik Összeállította: Pataki János; dátum: november. I. rész
 Pataki János, november Emelt szintű érettségi feladatsorok és megoldásaik Összeállította: Pataki János; dátum: november I rész feladat Oldja meg az alábbi egyenleteket: a) log 7 log log log 7 ; b) ( )
Pataki János, november Emelt szintű érettségi feladatsorok és megoldásaik Összeállította: Pataki János; dátum: november I rész feladat Oldja meg az alábbi egyenleteket: a) log 7 log log log 7 ; b) ( )
9. Előadás. (9. előadás) Lineáris egyr.(3.), Sajátérték április / 35
 Lineáris egyr.(3.), Sajátérték április / 35") 9. Előadás (9. előadás) Lineáris egyr.(3.), Sajátérték 2019. április 24. 1 / 35 Portfólió-analízis Tegyük fel, hogy egy bank 4 különböző eszközbe fektet be (réz, búza, arany és kakaó). Az ügyfeleinek ezen
9. Előadás (9. előadás) Lineáris egyr.(3.), Sajátérték 2019. április 24. 1 / 35 Portfólió-analízis Tegyük fel, hogy egy bank 4 különböző eszközbe fektet be (réz, búza, arany és kakaó). Az ügyfeleinek ezen
Lineáris Algebra GEMAN 203-B. A három dimenziós tér vektorai, egyenesei, síkjai
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Lineáris Algebra GEMAN 203-B A három dimenziós tér vektorai, egyenesei, síkjai a) Hogyan számítjuk ki az a = (a 1, a 2, a 3 ) és b = (b 1, b
Matematika előadás elméleti kérdéseinél kérdezhető képletek Lineáris Algebra GEMAN 203-B A három dimenziós tér vektorai, egyenesei, síkjai a) Hogyan számítjuk ki az a = (a 1, a 2, a 3 ) és b = (b 1, b
Numerikus módszerek. Labor gyakorlatok. Muszaki és Társadalotudományi Kar Marosvásárhely
 Numerikus módszerek Labor gyakorlatok Kupán Pál Muszaki és Társadalotudományi Kar Marosvásárhely Tartalomjegyzék. Sorok összegének a kiszámítása 5 2. A felez o módszer. A Newton-féle módszer. 7 3. A húr,
Numerikus módszerek Labor gyakorlatok Kupán Pál Muszaki és Társadalotudományi Kar Marosvásárhely Tartalomjegyzék. Sorok összegének a kiszámítása 5 2. A felez o módszer. A Newton-féle módszer. 7 3. A húr,
Hatványozás. A hatványozás azonosságai
 Hatványozás Definíció: a 0 = 1, ahol a R, azaz bármely szám nulladik hatványa mindig 1. a 1 = a, ahol a R, azaz bármely szám első hatványa önmaga a n = a a a, ahol a R, n N + n darab 3 4 = 3 3 3 3 = 84
Hatványozás Definíció: a 0 = 1, ahol a R, azaz bármely szám nulladik hatványa mindig 1. a 1 = a, ahol a R, azaz bármely szám első hatványa önmaga a n = a a a, ahol a R, n N + n darab 3 4 = 3 3 3 3 = 84
Ipari matematika 2. gyakorlófeladatok
 Ipari matematika. gyakorlófeladatok. december 5. A feladatok megoldása általában többféle úton is kiszámítató. Interpoláció a. Polinom-interpoláció segítségével adjunk közelítést sin π értékére a sin =,
Ipari matematika. gyakorlófeladatok. december 5. A feladatok megoldása általában többféle úton is kiszámítató. Interpoláció a. Polinom-interpoláció segítségével adjunk közelítést sin π értékére a sin =,
Matematika szigorlat június 17. Neptun kód:
 Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
Gauss-eliminációval, Cholesky felbontás, QR felbontás
 Közelítő és szimbolikus számítások 4. gyakorlat Mátrix invertálás Gauss-eliminációval, Cholesky felbontás, QR felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei
Közelítő és szimbolikus számítások 4. gyakorlat Mátrix invertálás Gauss-eliminációval, Cholesky felbontás, QR felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei
1.1. Alapfogalmak. Vektor: R 2 beli elemek vektorok. Pl.: (2, 3) egy olyan vektor aminek a kezdo pontja a (0, 0) pont és a végpontja a
 egy olyan vektor aminek a kezdo pontja a (0, 0) pont és a végpontja a") 1. 1. hét 1.1. Alapfogalmak Vektor: R 2 beli elemek vektorok. Pl.: (2, 3) egy olyan vektor aminek a kezdo pontja a (0, 0) pont és a végpontja a (2, 3) Egyenes normál vektora egy pontban: egy olyan vektor
1. 1. hét 1.1. Alapfogalmak Vektor: R 2 beli elemek vektorok. Pl.: (2, 3) egy olyan vektor aminek a kezdo pontja a (0, 0) pont és a végpontja a (2, 3) Egyenes normál vektora egy pontban: egy olyan vektor
Numerikus Matematika
 Numerikus Matematika Baran Ágnes Gyakorlat Interpoláció Baran Ágnes Numerikus Matematika 6.-7. Gyakorlat 1 / 40 Lagrange-interpoláció Példa Határozzuk meg a ( 2, 5), ( 1, 3), (0, 1), (2, 15) pontokra illeszkedő
Numerikus Matematika Baran Ágnes Gyakorlat Interpoláció Baran Ágnes Numerikus Matematika 6.-7. Gyakorlat 1 / 40 Lagrange-interpoláció Példa Határozzuk meg a ( 2, 5), ( 1, 3), (0, 1), (2, 15) pontokra illeszkedő
1. zárthelyi,
 1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
Folytonos rendszeregyenletek megoldása. 1. Folytonos idejű (FI) rendszeregyenlet általános alakja
 rendszeregyenlet általános alakja") Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
Lineáris algebra. (közgazdászoknak)
") Lineáris algebra (közgazdászoknak) 10A103 FELADATOK A GYAKORLATRA (3.) 2018/2019. tavaszi félév Lineáris egyenletrendszerek 3.1. Feladat. Oldjuk meg az alábbi lineáris egyenletrendszereket Gauss-eliminációval
Lineáris algebra (közgazdászoknak) 10A103 FELADATOK A GYAKORLATRA (3.) 2018/2019. tavaszi félév Lineáris egyenletrendszerek 3.1. Feladat. Oldjuk meg az alábbi lineáris egyenletrendszereket Gauss-eliminációval
Numerikus módszerek I. zárthelyi dolgozat (2017/18. I., A. csoport) Megoldások
 Megoldások") Numerikus módszerek I. zárthelyi dolgozat (2017/18. I., A. csoport) Megoldások 1. Feladat. (6p) Jelöljön. egy tetszőleges vektornormát, ill. a hozzá tartozó indukált mátrixnormát! Igazoljuk, hogy ha A
Numerikus módszerek I. zárthelyi dolgozat (2017/18. I., A. csoport) Megoldások 1. Feladat. (6p) Jelöljön. egy tetszőleges vektornormát, ill. a hozzá tartozó indukált mátrixnormát! Igazoljuk, hogy ha A
Feladatok a Diffrenciálegyenletek IV témakörhöz. 1. Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel.
 Feladatok a Diffrenciálegyenletek IV témakörhöz 1 Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel (a) y 3y 4y = 3e t (b) y 3y 4y = sin t (c) y 3y 4y = 8t
Feladatok a Diffrenciálegyenletek IV témakörhöz 1 Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel (a) y 3y 4y = 3e t (b) y 3y 4y = sin t (c) y 3y 4y = 8t
Gauss-Seidel iteráció
 Közelítő és szimbolikus számítások 5. gyakorlat Iterációs módszerek: Jacobi és Gauss-Seidel iteráció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 ITERÁCIÓS
Közelítő és szimbolikus számítások 5. gyakorlat Iterációs módszerek: Jacobi és Gauss-Seidel iteráció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 ITERÁCIÓS
Numerikus módszerek 1.
 Numerikus módszerek 1. 3. előadás: Mátrixok LU-felbontása Lócsi Levente ELTE IK 2013. szeptember 23. Tartalomjegyzék 1 Alsó háromszögmátrixok és Gauss-elimináció 2 Háromszögmátrixokról 3 LU-felbontás Gauss-eliminációval
Numerikus módszerek 1. 3. előadás: Mátrixok LU-felbontása Lócsi Levente ELTE IK 2013. szeptember 23. Tartalomjegyzék 1 Alsó háromszögmátrixok és Gauss-elimináció 2 Háromszögmátrixokról 3 LU-felbontás Gauss-eliminációval
DIFFERENCIAEGYENLETEK
 DIFFERENCIAEGYENLETEK Példa: elsőrendű állandó e.h. lineáris differenciaegyenlet Ennek megoldása: Kezdeti feltétellel: Kezdeti feltétel nélkül ha 1 és a végtelen összeg (abszolút) konvergens: / 1 Minden
DIFFERENCIAEGYENLETEK Példa: elsőrendű állandó e.h. lineáris differenciaegyenlet Ennek megoldása: Kezdeti feltétellel: Kezdeti feltétel nélkül ha 1 és a végtelen összeg (abszolút) konvergens: / 1 Minden
Diszkrét matematika I., 12. előadás Dr. Takách Géza NyME FMK Informatikai Intézet takach november 30.
 1 Diszkrét matematika I, 12 előadás Dr Takách Géza NyME FMK Informatikai Intézet takach@infnymehu http://infnymehu/ takach 2005 november 30 Vektorok Definíció Egy tetszőleges n pozitív egész számra n-komponensű
1 Diszkrét matematika I, 12 előadás Dr Takách Géza NyME FMK Informatikai Intézet takach@infnymehu http://infnymehu/ takach 2005 november 30 Vektorok Definíció Egy tetszőleges n pozitív egész számra n-komponensű
y + a y + b y = r(x),
,") Definíció 1 A másodrendű, állandó együtthatós, lineáris differenciálegyenletek általános alakja y + a y + b y = r(x), ( ) ahol a és b valós számok, r(x) pedig adott függvény. Ha az r(x) függvény az azonosan
Definíció 1 A másodrendű, állandó együtthatós, lineáris differenciálegyenletek általános alakja y + a y + b y = r(x), ( ) ahol a és b valós számok, r(x) pedig adott függvény. Ha az r(x) függvény az azonosan
First Prev Next Last Go Back Full Screen Close Quit
 Valós függvények (2) (Határérték) 1. A a R szám δ > 0 sugarú környezete az (a δ, a + δ) nyílt intervallum. Ezután a valós számokat, a számegyenesen való ábrázolhatóságuk miatt, pontoknak is fogjuk hívni.
Valós függvények (2) (Határérték) 1. A a R szám δ > 0 sugarú környezete az (a δ, a + δ) nyílt intervallum. Ezután a valós számokat, a számegyenesen való ábrázolhatóságuk miatt, pontoknak is fogjuk hívni.
3. Előadás. Megyesi László: Lineáris algebra, oldal. 3. előadás Lineáris egyenletrendszerek
 3. Előadás Megyesi László: Lineáris algebra, 47. 50. oldal. Gondolkodnivalók Determinánsok 1. Gondolkodnivaló Determinánselméleti tételek segítségével határozzuk meg a következő n n-es determinánst: 1
3. Előadás Megyesi László: Lineáris algebra, 47. 50. oldal. Gondolkodnivalók Determinánsok 1. Gondolkodnivaló Determinánselméleti tételek segítségével határozzuk meg a következő n n-es determinánst: 1
Egyenletek, egyenlőtlenségek X.
 Egyenletek, egyenlőtlenségek X. DEFINÍCIÓ: (Logaritmus) Ha egy pozitív valós számot adott, 1 - től különböző pozitív alapú hatvány alakban írunk fel, akkor ennek a hatványnak a kitevőjét logaritmusnak
Egyenletek, egyenlőtlenségek X. DEFINÍCIÓ: (Logaritmus) Ha egy pozitív valós számot adott, 1 - től különböző pozitív alapú hatvány alakban írunk fel, akkor ennek a hatványnak a kitevőjét logaritmusnak
Line aris f uggv enyilleszt es m arcius 19.
 Lineáris függvényillesztés 2018. március 19. Illesztett paraméterek hibája Eddig azt néztük, hogy a mérési hiba hogyan propagál az illesztett paraméterekbe, ha van egy konkrét függvényünk. a hibaterjedés
Lineáris függvényillesztés 2018. március 19. Illesztett paraméterek hibája Eddig azt néztük, hogy a mérési hiba hogyan propagál az illesztett paraméterekbe, ha van egy konkrét függvényünk. a hibaterjedés
Komplex számok. Wettl Ferenc előadása alapján Wettl Ferenc előadása alapján Komplex számok / 18
 Komplex számok Wettl Ferenc előadása alapján 2015.09.23. Wettl Ferenc előadása alapján Komplex számok 2015.09.23. 1 / 18 Tartalom 1 Számok A számfogalom bővülése 2 Algebrai alak Trigonometrikus alak Egységgyökök
Komplex számok Wettl Ferenc előadása alapján 2015.09.23. Wettl Ferenc előadása alapján Komplex számok 2015.09.23. 1 / 18 Tartalom 1 Számok A számfogalom bővülése 2 Algebrai alak Trigonometrikus alak Egységgyökök
Nemlineáris programozás 2.
 Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
9. Előadás. Megyesi László: Lineáris algebra, oldal. 9. előadás Mátrix inverze, Leontyev-modell
 9. Előadás Megyesi László: Lineáris algebra, 75. 84. oldal. Gondolkodnivalók Mátrix rangja 1. Gondolkodnivaló Tegyük fel, hogy egy elemi bázistranszformáció kezdetekor a sor- és oszlopindexek sorban helyezkednek
9. Előadás Megyesi László: Lineáris algebra, 75. 84. oldal. Gondolkodnivalók Mátrix rangja 1. Gondolkodnivaló Tegyük fel, hogy egy elemi bázistranszformáció kezdetekor a sor- és oszlopindexek sorban helyezkednek
A KroneckerCapelli-tételb l következik, hogy egy Bx = 0 homogén lineáris egyenletrendszernek
 10. gyakorlat Mátrixok sajátértékei és sajátvektorai Azt mondjuk, hogy az A M n mátrixnak a λ IR szám a sajátértéke, ha létezik olyan x IR n, x 0 vektor, amelyre Ax = λx. Ekkor az x vektort az A mátrix
10. gyakorlat Mátrixok sajátértékei és sajátvektorai Azt mondjuk, hogy az A M n mátrixnak a λ IR szám a sajátértéke, ha létezik olyan x IR n, x 0 vektor, amelyre Ax = λx. Ekkor az x vektort az A mátrix
Vektorok és koordinátageometria
 Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
Tartalom. Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás
 Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Arany Dániel Matematikai Tanulóverseny 2014/2015-ös tanév első (iskolai) forduló Haladók II. kategória
 forduló Haladók II. kategória") Bolyai János Matematikai Társulat Arany Dániel Matematikai Tanulóverseny 01/01-ös tanév első iskolai) forduló Haladók II. kategória Megoldások és javítási útmutató 1. Adott az alábbi két egyenletrendszer:
Bolyai János Matematikai Társulat Arany Dániel Matematikai Tanulóverseny 01/01-ös tanév első iskolai) forduló Haladók II. kategória Megoldások és javítási útmutató 1. Adott az alábbi két egyenletrendszer:
10. Koordinátageometria
 I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
6. gyakorlat. Gelle Kitti. Csendes Tibor Somogyi Viktor. London András. jegyzetei alapján
 Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Koordináta geometria III.
 Koordináta geometria III. TÉTEL: A P (x; y) pont akkor és csak akkor illeszkedik a K (u; v) középpontú r sugarú körre (körvonalra), ha (x u) 2 + (y v) 2 = r 2. Ez az összefüggés a K (u; v) középpontú r
Koordináta geometria III. TÉTEL: A P (x; y) pont akkor és csak akkor illeszkedik a K (u; v) középpontú r sugarú körre (körvonalra), ha (x u) 2 + (y v) 2 = r 2. Ez az összefüggés a K (u; v) középpontú r
2 (j) f(x) dx = 1 arcsin(3x 2) + C. (d) A x + Bx + C 5x (2x 2 + 7) + Hx + I. 2 2x F x + G. x
 f(x) dx = 1 arcsin(3x 2) + C. (d) A x + Bx + C 5x (2x 2 + 7) + Hx + I. 2 2x F x + G. x") I feladatsor Határozza meg az alábbi függvények határozatlan integrálját: a fx dx = x arctg + C b fx dx = arctgx + C c fx dx = 5/x 4 arctg 5 x + C d fx dx = arctg + C 5/ e fx dx = x + arctg + C f fx dx
I feladatsor Határozza meg az alábbi függvények határozatlan integrálját: a fx dx = x arctg + C b fx dx = arctgx + C c fx dx = 5/x 4 arctg 5 x + C d fx dx = arctg + C 5/ e fx dx = x + arctg + C f fx dx
Lineáris leképezések (előadásvázlat, szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
differenciálegyenletek
 Állandó együtthatójú lineáris homogén differenciálegyenletek L[y] = y (n) + a 1y (n 1) + + a ny = 0 a i R (1) a valós, állandó együtthatójú lineáris homogén n-ed rendű differenciálegyenlet Megoldását y
Állandó együtthatójú lineáris homogén differenciálegyenletek L[y] = y (n) + a 1y (n 1) + + a ny = 0 a i R (1) a valós, állandó együtthatójú lineáris homogén n-ed rendű differenciálegyenlet Megoldását y
Differenciálegyenletek numerikus integrálása április 9.
 Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Gauss elimináció, LU felbontás
 Közelítő és szimbolikus számítások 3. gyakorlat Gauss elimináció, LU felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 EGYENLETRENDSZEREK 1. Egyenletrendszerek
Közelítő és szimbolikus számítások 3. gyakorlat Gauss elimináció, LU felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 EGYENLETRENDSZEREK 1. Egyenletrendszerek
Numerikus matematika. Irodalom: Stoyan Gisbert, Numerikus matematika mérnököknek és programozóknak, Typotex, Lebegőpontos számok
 Numerikus matematika Irodalom: Stoyan Gisbert, Numerikus matematika mérnököknek és programozóknak, Typotex, 2007 Lebegőpontos számok Normák, kondíciószámok Lineáris egyenletrendszerek Legkisebb négyzetes
Numerikus matematika Irodalom: Stoyan Gisbert, Numerikus matematika mérnököknek és programozóknak, Typotex, 2007 Lebegőpontos számok Normák, kondíciószámok Lineáris egyenletrendszerek Legkisebb négyzetes
A parciális törtekre bontás?
 Miért működik A parciális törtekre bontás? Borbély Gábor 212 június 7 Tartalomjegyzék 1 Lineáris algebra formalizmus 2 2 A feladat kitűzése 3 3 A LER felépítése 5 4 A bizonyítás 6 1 Lineáris algebra formalizmus
Miért működik A parciális törtekre bontás? Borbély Gábor 212 június 7 Tartalomjegyzék 1 Lineáris algebra formalizmus 2 2 A feladat kitűzése 3 3 A LER felépítése 5 4 A bizonyítás 6 1 Lineáris algebra formalizmus
Lineáris algebra Gyakorló feladatok
 Lineáris algebra Gyakorló feladatok. október.. Feladat: Határozzuk meg a, 4b, c és a b c vektorokat, ha a = (; ; ; ; b = (; ; ; ; c = ( ; ; ; ;.. Feladat: Határozzuk meg a, 4b, a, c és a b; c + b kifejezések
Lineáris algebra Gyakorló feladatok. október.. Feladat: Határozzuk meg a, 4b, c és a b c vektorokat, ha a = (; ; ; ; b = (; ; ; ; c = ( ; ; ; ;.. Feladat: Határozzuk meg a, 4b, a, c és a b; c + b kifejezések
1. Determinánsok. Oldjuk meg az alábbi kétismeretlenes, két egyenletet tartalmaz lineáris egyenletrendszert:
 1 Determinánsok 1 Bevezet definíció Oldjuk meg az alábbi kétismeretlenes, két egyenletet tartalmaz lineáris egyenletrendszert: a 11 x 1 +a 12 x 2 = b 1 a 21 x 1 +a 22 x 2 = b 2 Szorozzuk meg az első egyenletet
1 Determinánsok 1 Bevezet definíció Oldjuk meg az alábbi kétismeretlenes, két egyenletet tartalmaz lineáris egyenletrendszert: a 11 x 1 +a 12 x 2 = b 1 a 21 x 1 +a 22 x 2 = b 2 Szorozzuk meg az első egyenletet
1.7. Elsőrendű lineáris differenciálegyenlet-rendszerek
 7 Elsőrendű lineáris differenciálegyenlet-rendszerek Legyen n N, I R intervallum és A: I M n n (R), B: I R n folytonos függvények, és tekintsük az { y (x) = A(x)y(x) + B(x) y(ξ) = η kezdeti érték problémát,
7 Elsőrendű lineáris differenciálegyenlet-rendszerek Legyen n N, I R intervallum és A: I M n n (R), B: I R n folytonos függvények, és tekintsük az { y (x) = A(x)y(x) + B(x) y(ξ) = η kezdeti érték problémát,
LINEÁRIS EGYENLETRENDSZEREK október 12. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak
 LINEÁRIS EGYENLETRENDSZEREK 004. október. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak az előadáson, másrészt megtalálják a jegyzetben: Szabó László:
LINEÁRIS EGYENLETRENDSZEREK 004. október. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak az előadáson, másrészt megtalálják a jegyzetben: Szabó László:
Konjugált gradiens módszer
 Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közönséges differenciálegyenletek megoldása Mapleben
 Közönséges differenciálegyenletek megoldása Mapleben Differenciálegyenlet alatt egy olyan egyenletet értünk, amelyben a meghatározandó ismeretlen egy függvény, és az egyenlet tartalmazza az ismeretlen
Közönséges differenciálegyenletek megoldása Mapleben Differenciálegyenlet alatt egy olyan egyenletet értünk, amelyben a meghatározandó ismeretlen egy függvény, és az egyenlet tartalmazza az ismeretlen
Oktatási Hivatal. 1 pont. A feltételek alapján felírhatók az. összevonás után az. 1 pont
 Oktatási Hivatal Öt pozitív egész szám egy számtani sorozat első öt eleme A sorozatnak a különbsége prímszám Tudjuk hogy az első négy szám köbének összege megegyezik az ezen öt tag közül vett páros sorszámú
Oktatási Hivatal Öt pozitív egész szám egy számtani sorozat első öt eleme A sorozatnak a különbsége prímszám Tudjuk hogy az első négy szám köbének összege megegyezik az ezen öt tag közül vett páros sorszámú
karakterisztikus egyenlet Ortogonális mátrixok. Kvadratikus alakok főtengelytranszformációja
 Mátrixok hasonlósága, karakterisztikus mátrix, karakterisztikus egyenlet Ortogonális mátrixok. Kvadratikus alakok főtengelytranszformációja 1.Mátrixok hasonlósága, karakterisztikus mátrix, karakterisztikus
Mátrixok hasonlósága, karakterisztikus mátrix, karakterisztikus egyenlet Ortogonális mátrixok. Kvadratikus alakok főtengelytranszformációja 1.Mátrixok hasonlósága, karakterisztikus mátrix, karakterisztikus
Explicit hibabecslés Maxwell-egyenletek numerikus megoldásához
 Explicit hibabecslés Maxwell-egyenletek numerikus megoldásához Izsák Ferenc 2007. szeptember 17. Explicit hibabecslés Maxwell-egyenletek numerikus megoldásához 1 Vázlat Bevezetés: a vizsgált egyenlet,
Explicit hibabecslés Maxwell-egyenletek numerikus megoldásához Izsák Ferenc 2007. szeptember 17. Explicit hibabecslés Maxwell-egyenletek numerikus megoldásához 1 Vázlat Bevezetés: a vizsgált egyenlet,
n n (n n ), lim ln(2 + 3e x ) x 3 + 2x 2e x e x + 1, sin x 1 cos x, lim e x2 1 + x 2 lim sin x 1 )
, lim ln(2 + 3e x ) x 3 + 2x 2e x e x + 1, sin x 1 cos x, lim e x2 1 + x 2 lim sin x 1 )") Matek szigorlat Komplex számok Sorozat határérték., a legnagyobb taggal egyszerűsítünk n n 3 3n 2 + 2 3n 2 n n + 2 25 n 3 9 n 2 + + 3) 2n 8 n 3 2n 3,, n n5 + n 2 n 2 5 2n + 2 3n 2) n+ 2. e-ados: + a )
Matek szigorlat Komplex számok Sorozat határérték., a legnagyobb taggal egyszerűsítünk n n 3 3n 2 + 2 3n 2 n n + 2 25 n 3 9 n 2 + + 3) 2n 8 n 3 2n 3,, n n5 + n 2 n 2 5 2n + 2 3n 2) n+ 2. e-ados: + a )