Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek
|
|
|
- Viktória Siposné
- 5 évvel ezelőtt
- Látták:
Átírás
1 Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M május május / 36
2 Tartalom 1 Mátrixhatványok konvergenciája 2 Differenciaegyenletrendszerek 3 Differenciaegyenletek alkalmazásai 4 Differenciálegyenlet-rendszerek május / 36
3 Mátrixhatványok konvergenciája 1 Mátrixhatványok konvergenciája 2 Differenciaegyenletrendszerek 3 Differenciaegyenletek alkalmazásai 4 Differenciálegyenlet-rendszerek május / 36
4 Mátrixhatványok konvergenciája O-hoz konvergálás T Egy A C n n mátrixra lim k A k = O pontosan akkor teljesül, ha ρ(a) < 1. B ( ) A = CJC 1 A k = CJ k C 1 Egy m m-es Jordan-blokkra λ k ( k ( 1) λ k 1... k ) m 1 λ k m+1 J k 0 λ λ = k (... k ) m 2 λ k m λ k így lim k J k = O esetén λ k 0 λ < 1. ( ) λ < 1 esetén ( ) k λ k i ki λ k i 0 i i! május / 36
5 Mátrixhatványok konvergenciája Neumann-sor T Egy A C n n mátrixra k=0 A k pontosan akkor konvergens, ha ρ(a) < 1, és ez esetben k=0 A k = (I A) 1 B ( ) k=0 A k konvergens k=0 J k λ konvergens minden Jordan-blokkra k=0 λ k konvergens λ < 1. ( ) ρ(a) < 1 lim k A k = O (I A)(I + A + A A k 1 ) = I A k I I + A + A A k konvergens és k=0 A k = (I A) május / 36
6 Mátrixhatványok konvergenciája Konvergens mátrixhatványok T Az A C n n mátrixra lim k Ak pontosan akkor konvergens, ha ρ(a) < 1 vagy, ha ρ(a) = 1 ahol λ = 1 az egyetlen sajátérték a spektrálkörön, és a λ = 1 geometriai és algebrai multiplicitása azonos. Konvergencia esetén lim k Ak = P 1, az N (A I)-re az O(A I) mentén való vetítés mátrixa (az 1-hez tartozó spektrálvetítő). B Ha ρ(a) > 1 a hatványok divergálnak, ha ρ(a) < 1, O-hoz konvergálnak. Marad az ρ(a) = 1 eset. Ha a spektrálkörön van 1-től különböző sajátérték, akkor a hozzá tartozó Jordan-blokk hatványainak főátlóiban az ce kiφ hatványok végtelen osszcilláló sorozatot adnak, ami miatt A k is divergens marad május / 36
7 Mátrixhatványok konvergenciája Ha λ = 1-hez tartozik egy m > 1 rendű Jordan-blokk, akkor annak hatványai divergensek: 1 ( k) ( 1... k ) ( m k ) m Marad az az eset, hogy az 1-hez tartozó minden Jordan-blokk 1 1-es (I k I, tehát konvergens). Ekkor, ha az 1 multiplicitása s, akkor [ ] [ A k = CJ k C 1 Is O = C O B k C 1 Is = [X 1 X 2 ] O [ ] [ ] k Is O Y T [X 1 X 2 ] 1 = X O O 1 Y1 T = P 1 Y T 2 ] [ ] O Y T 1 B k Y T május / 36
8 Differenciaegyenletrendszerek 1 Mátrixhatványok konvergenciája 2 Differenciaegyenletrendszerek 3 Differenciaegyenletek alkalmazásai 4 Differenciálegyenlet-rendszerek május / 36
9 Differenciaegyenletrendszerek Fibonacci-sorozat explicit alakja P A Fibonacci-sorozat F 0 = 0, F 1 = 1, F n+1 = F n + F n 1 (0, 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233, 377, 610, 987,... ) explicit alakja: F n = 1 ( ( ) n ( ) n ) M Keressünk a rekurzív képletre F n = λ n alakú megoldást! λ n+1 = λ n + λ n 1 λ 2 λ 1 = 0 λ 1,2 = 1± 5 2 Az (1, λ i, λ 2 i,... ) sorozatok lin. ftlenek, ui ) n ( c2 ( Lineáris kombinációik mind megoldások: c A kezdeti feltételek (F 0 = 0, F 1 = 1) kielégítéséhez megoldandó c c 1 + c 2 = 0 + c = 1 c 1 = c 2 = május / 36 ) n
10 Differenciaegyenletrendszerek Állandó együtthatós homogén lineáris differenciaegyenlet D d-edrendű állandó együtthatós homogén lineáris differenciaegyenlet: x n = a 1 x n 1 + a 2 x n a d x n d, ahol a 1, a 2,..., a d és a kezdeti feltételül szolgáló x 0, x 1,..., x d 1 adott konstansok, x d, x d+1,... ismeretlenek. A DE karakterisztikus polinomja χ(t) = t d a 1 t d 1 a 2 t d 2... a d, gyökei a sajátértékek. Á Ha (x 0, x 1, x 2,... ) és (y 0, y 1, y 2,... ) megoldásai egy (állandó együtthatós) homogén lineáris differenciaegyenletnek, akkor tetszőleges c, d R konstansokra (cx 0 + dy 0, cx 1 + dy 1,... ) is. T Ha λ i gyöke a karakterisztikus egyenletnek, akkor x n = i c iλ n i megoldása az egyenletnek. Ha a sajátértékek különbözők, akkor ilyen alakban az összes megoldás megkapható. B Ha λ i -k különbözők, akkor d független megoldásunk van (mert a Vandermonde-determinánsuk nem 0), így minden kezdeti feltétel egyértelműen megoldható lineáris egyenletrendszerre vezet. m Ha λ multiplicitása r, akkor a független megoldások a következők: λ n, nλ n, n 2 λ n,..., n r 1 λ n május / 36
11 Differenciaegyenletrendszerek P x n = 5x n 1 8x n 2 + 4x n 3, x 0 = 0, x 1 = 1, x 2 = 5. M χ(λ) = λ 3 5λ 2 + 8λ 4 = (λ 1)(λ 2) 2 Összes megoldás: x n = c 1 1 n + c 2 2 n + c 3 n2 n. Kezdeti feltételekből: c 1 = 1, c 2 = 1, c 3 = 1, x n = 1 2 n + n2 n, (0, 1, 5, 17, 49, 129,... ) május / 36
12 Differenciaegyenletrendszerek Differenciaegyenletrendszer D Elsőrendű lineáris differenciaegyenlet-rendszer: x k+1 = Ax k x k+1 = Ax k + b k homogén inhomogén ahol x 0, b 0, b 1, b 2... ismert vektorok, x k ismeretlen, ha k > 0. T Az elsőrendű lineáris differenciaegyenlet-rendszer megoldása x k = A k x 0, k 1 x k = A k x 0 + A k 1 i b i, i=0 (homogén) (inhomogén) ahol k > május / 36
13 Differenciaegyenletrendszerek m Minden állandó együtthatós d-edrendű lineáris differenciaegyenlet átírható elsőrendű lineáris differenciaegyenlet-rendszerré, ui. ha x n a 1 x n 1 a 2 x n 2... a d x n d = 0, azaz x d a 1 x d 1 a 2 x d 2... a d x 0 = 0, akkor x x 0 x x 1. = , vagy x d x d 2 x d a 1 a 2... a d 1 a d x d 1 x d a 1 a 2... a d 1 a d x d 1 x d x d 2. = x x 1 x x 0 Előbbi a kísérő mátrix transzponáltja május / 36
14 Differenciaegyenletek alkalmazásai 1 Mátrixhatványok konvergenciája 2 Differenciaegyenletrendszerek 3 Differenciaegyenletek alkalmazásai 4 Differenciálegyenlet-rendszerek május / 36
15 Differenciaegyenletek alkalmazásai P Számítsuk ki az alábbi n-edrendű determináns értékét: D n = M D n = 2D n 1 D n 2, ugyanis az első sor szerint kifejtve D n = ( 1) (n 1) = (n 1) (n 2) (n 1) május / 36
16 Differenciaegyenletek alkalmazásai 2 1 D 1 = 2, D 2 = 1 2 = 3 λ 2 2λ + 1 λ = 1 A két független megoldás (1, 1, 1, 1,... ), (0, 1, 2, 3,... ) c 1 + 0c 2 = 2, c 1 + c 2 = 3 c 1 = 2, c 2 = 1 D n = n május / 36
17 Differenciaegyenletek alkalmazásai P Számítsuk ki az alábbi integrál értékét, ha a R konstans, a kπ: I n = π 0 cos nx cos na cos x cos a M I 0 = 0, I 1 = π, I n+1 (2 cos a)i n + I n 1 = 0, ugyanis π cos nx cos x sin nx sin x cos na cos a + sin na sin a 0 cos x cos a cos nx cos na 2 cos a cos x cos a cos nx cos x + sin nx sin x cos na cos a sin na sin a + dx cos x cos a = π 0 2 cos nx dx = 0, mert n > 0. dx május / 36
18 Differenciaegyenletek alkalmazásai λ 2 (2 cos a)λ + 1 = 0 λ 1,2 = 2 cos a ± 4 cos 2 a 4 = e ±ai 2 az alapmegoldások: (1, e ai, e 2ai, e 3ai,... ), (1, e ai, e 2ai, e 3ai,... ). c 1 + c 2 = 0, c 1 e ai + c 2 e ai = π c 1 (2i sin a) = π c 1 = π 2i sin a I n = π (cos na + i sin na) π 2i sin a sin na (cos na i sin na) = π 2i sin a sin a május / 36
19 Differenciálegyenlet-rendszerek 1 Mátrixhatványok konvergenciája 2 Differenciaegyenletrendszerek 3 Differenciaegyenletek alkalmazásai 4 Differenciálegyenlet-rendszerek május / 36
20 Differenciálegyenlet-rendszerek D Elsőrendű explicit nemlineáris differenciálegyenlet-rendszer: x = f(t, x), ahol f : R R n R n Autonóm, ha időfüggetlen: x = f(x), ahol f : R n R n (1) Állandó együtthatós lineáris (autonóm lineáris), ha x = Ax, ahol A R n n. (2) Az autonóm DER egy konstans x(t) = u megoldását egyensúlyi helyzetnek nev. Á A konstans u pontosan akkor egyensúlyi helyzete az (1) egyenletnek, ha f(u) = 0. Á Invertálható A esetén a (2) lineáris DER egyetlen egyensúlyi helyzete a május / 36
21 Differenciálegyenlet-rendszerek Stabilitás D AMH az u egyensúlyi helyzetet stabil, ha bármely ε > 0-hoz létezik olyan δ > 0, hogy ha bármely olyan x(t) megoldásra, melyre x(0) = x 0 és x 0 u < δ, igaz hogy x(t) u < ε a t 0 intervallumon. AMH az u egyensúlyi helyzet instabil, ha nem stabil. AMH az u egyensúlyi helyzetet aszimptotikusan stabil, ha stabil, és van olyan α > 0, hogy ha x 0 u < α, akkor lim t x(t) = u. T Legyen σ(a) = {λ 1,..., λ s }. A x = Ax DER egy x(t) megoldása pontosan akkor aszimptotikusan stabil, ha Re(λ i ) < 0 minden i = 1,..., s esetén. pontosan akkor stabil, ha Re(λ i ) 0 minden sajátértékre, és ha valamelyik λ i sajátértékre Re(λ i ) = 0, akkor a geometriai és algebrai multiplicitások egyenlők május / 36
22 Differenciálegyenlet-rendszerek Lineáris DER megoldása Á A Jordan-blokkok függvénye alapján t λ t 2 t 2!... n 1 (n 1)! 0 λ t 0 1 t... n 2 J = 0 0 λ... 0 esetén e Jt = e λt (n 2)! t n 3 (n 3)! λ T (e At ) = Ae At B pl. hatványsorral T Az x (t) = Ax(t), x(0) = x 0 kezdeti érték probléma megoldása x(t) = e At x 0. B (e At x 0 ) = Ae At x 0, vagyis megoldás, másrészt kielégíti a kezdeti feltételt, ui. e A0 x 0 = Ix 0 = x május / 36
23 Differenciálegyenlet-rendszerek Á Az x = Ax DER bármely x 1 és x 2 megoldásának bármely cx 1 + dx 2 lin. kombinációja megoldás. B Egyszerű behelyettesítéssel: (cx 1 + dx 2 ) = cx 1 + dx 2 = cax 1 + dax 2 = A(cx 1 + dx 2 ) m Mivel minden megoldáshoz tartoznak kezdeti feltételek, és minden kezdetiérték-probléma megoldható az e At oszlopainak lineáris kombinációjaként, ezért minden megoldás e At oszlopainak lineáris kombinációja. m Az előzőek szerint az x = Ax DER megoldásai vektorteret alkotnak, és annak minden vektora előáll az e At oszlopainak lineáris kombinációjaként, tehát ezek az oszlopvektorok bázist alkotnak a megoldások terében, ha lineárisan függetlenek (ezt később belátjuk). D Az x = Ax DER megoldásai terének valamely bázisát alaprendszernek nevezzük május / 36
24 Differenciálegyenlet-rendszerek Példa P Három tartály mindegyikében szennyezett víz van, a szennyezőanyag mennyisége kezdetben c 1, c 2, c 3 a V liter mennyiségű vízben. A harmadik tartályba tiszta víz folyik C liter/sec sebességgel, minden tartályból ugyanekkora sebességgel folyik ki az összekeveredett víz. Mennyi a szennyezőanyag mennyisége a tartályokban t > 0 esetén, ha feltételezzük, hogy a víz nagyon gyorsan és egyenletesen összekeveredik. C liter/sec c 3 V V c 2 V c május / 36
25 Differenciálegyenlet-rendszerek M Jelölje x i (t) az i-edik tartálybeli szennyező mennyiségét. Δt idő alatt CΔt mennyiségű tiszta víz folyik be, ugyanennyi ki, de a befolyó szennyező mennyisége 0, a kifolyóé x 3(t) CΔt. Így V Δx 3 (t) Δt = 0 x 3(t) V CΔt Δt x 3(t) = C V x 3(t). A másik két tartályba van befolyó szennyezés is, így a kapott három differenciálegyenlet mátrixalakban a következő: x 1 (t) x 2 (t) = C x 1 (t) x 2 (t) x 3 (t) V x 3 (t) május / 36
26 Differenciálegyenlet-rendszerek Az e At az A Jordan-alakjából leolvasható, mivel az épp a Jordan-alak konstansszorosa. Így elég e At helyett e C V tj -t számolni: e At = e C V tj = e C V t 1 C V t 1 2 ( C V t)2 C 0 1 V t Innen a megoldás, figyelembe véve a kezdeti feltételeket is: x(t) = e At c C 1 c 1 + c 2 = e C V t V t + c ( C V t)2 C c 2 + c 3 c 2 c 3 c 3 V t május / 36
27 Differenciálegyenlet-rendszerek P Oldjuk meg az x = [ ] 2 1 x, x = 1M χ A (λ) = λ 2 6λ + 9 = (λ 3) 2 λ 1,2 = 3 [ ] 1 2 Sajátvektor: (1, 1)t, Jordan-lánc: ( 1, 1) (1, 0) [ ] [ ] [ ] C =, C =, J = [ ] [ ] e e Jt 3t te = 3t t + 1 t 0 e 3t, e At = Ce Jt C 1 = e 3t t t + 1 [ ] [ ] [ ] [ ] x(t) = e At 1 = e 3t t + 1 t 1 = e 3t t t t t május / 36
28 Differenciálegyenlet-rendszerek 2M χ A (λ) = (λ 3) 2, J = [ ] 3 1 ; λ = 3, m 1 = 2, j = 0, 1, i = 1 a p (j) (λ i ) = f (j) (λ i ), j = 0, 1,..., m i 1, i = 1,..., k képletben. f (x) = e xt, f (x) = te xt, p(x) = ax + b, p (x) = a, f (3) = p(3) f (3) = p (3) e 3t = 3a + b te 3t = a a = te3t b = (1 3t)e 3t p(x) = te 3t x + (1 [ 3t)e 3t ] [ ] e At = p(a) = te 3t + (1 3t)e 2 4 3t 0 1 [ ] [ ] [ ] [ ] x(t) = e At 1 = te 3t (1 3t)e 3t [ ] = e 3t t + 1 t május / 36
29 Differenciálegyenlet-rendszerek 3M Ha A R 2 2 és λ geometriai multiplicitása 1, algebrai 2, a Jordan-lánc 0 u v, akkor {e λt u, te λt u + e λt v} alaprendszer, ui. x = c 1 (e λt u) + c 2 (te λt u + e λt v) Esetünkben λ = 3, u = ( 1, 1), v = (1, 0), így az összes megoldás [ ] [ ] [ ] x(t) = c 1 e 3t 1 + c 1 2 te 3t 1 + c 1 2 e 3t 1 0 A kezdeti feltétel x(0) = (1, 2), ebből [ ] [ ] [ ] = c c c 1 = 2, c 2 = 1 A kezdetiérték-probléma megoldása [ ] [ ] x(t) = 2e 3t 1 te 3t e 3t [ 1 0 ] [ ] = e 3t t + 1. t május / 36
30 Differenciálegyenlet-rendszerek Megoldások függetlensége D Az (a, b) intervallumon értelmezett x 1 (t), x 2 (t),... x n (t) függvények függetlenek (a, b)-n, ha c 1 x 1 (t) + + c n x n (t) = 0 csak akkor állhat fenn minden t (a, b) helyen, ha c 1 = = c n = 0. T Ha a W (x 1,..., x n ) Wronski-determináns legalább egy pontban nem 0, akkor a függvények függetlenek, ahol x 11 (t) x 21 (t)... x n1 (t) x 12 (t) x 22 (t)... x n2 (t) W (x 1,..., x n ) = x 1n (t) x 2n (t)... x nn (t) ahol x i = (x i1, x i2,..., x in ). B trivi: ha W egy t helyen nem 0, akkor a c i -kre vonatkozó egyenletrendszer egyértelműen megoldható! (A tétel megfordítása nem igaz pl. (t 2, t), (t, 1).) május / 36
31 Differenciálegyenlet-rendszerek P Az x (t) = Ax(t) DER alaprendszerét alkotják e At oszlopai. Igazoljuk Wronski-determinánssal, hogy ezek lineárisan független függvények! M Az alaprendszer Wronski-detrminánsa det(e At ). det(e At ) = e t j λ j 0 egyetlen t helyen sem május / 36
32 Differenciálegyenlet-rendszerek Lineáris differenciálegyenlet és differenciálegyenlet-rendszer Á Az y (n) = a 1 y (n 1) + a 2 y (n 2) a n 1 y + a n y DE ekvivalens a következő DER-rel: y (n) a 1 a 2... a n 1 a n y (n 1) y (n 1) y (n 2). = y..... y y y május / 36
33 Differenciálegyenlet-rendszerek Wronski-determináns D Az I intervallumon értelmezett és ott legalább n 1-szer diffható y 1, y 2,..., y n függvények Wronski-determinánsán a függvényt értjük. W (y 1, y 2,..., y n ) = y 1 y 2... y n y 1 y 2... y n y n (n 1) y (n 1) 1 y (n 1) T Ha az I intervallumon értelmezett és ott legalább n 1-szer diffható y 1, y 2,..., y n függvények Wronski-determinánsa az I-n nem azonosan 0, akkor e függvények lineárisan függetlenek május / 36
34 Differenciálegyenlet-rendszerek B c 1 y 1 + c 2 y c n y n = 0 c 1 y (k) 1 + c 2 y (k) c n y n (k) = 0 (k = 0, 1,..., n 1) Az egyenletrendszer együtthatómátrixának determinánsa y 1 y 2... y n y 1 y 2... y n W (y 1, y 2,..., y n ) = y (n 1) 1 y (n 1) 2... y n (n 1) ami ha valamely t I helyen nem 0, az egyenletrendszer egyértelműen megoldható. m Az állítás megfordítása nem igaz: y 1 = { x 2, ha x > 0, 0, egyébként y 2 = { x 2, ha x < 0, 0, egyébként W (y 1, y 2 ) = 0, de a fv-ek függetlenek május / 36
35 Differenciálegyenlet-rendszerek A fázissíkról 2-dimenziós esetben a differenciálegyenlet-rendszerek megoldásai szépen szemléltethetőek. D Az autonóm x = f(x) (f : R n R n ) egyenletrendszerek megoldásai az R n térben görbeként ábrázolhatók. Bizonyos feltételek mellett (pl. ha f lineáris), minden ponton át pontosan egy pályagörbe (trajektória) halad. Az R n teret fázistérnek, a trajektóriákat, és/vagy egy rács x pontjaiba húzott x vektorokat is tartalmazó ábrát fázisportrének nevezik. Egy phase portrait mathlet A Wikipédia a fázis-síkról, és az onnan származó rajz a következő oldalon: május / 36
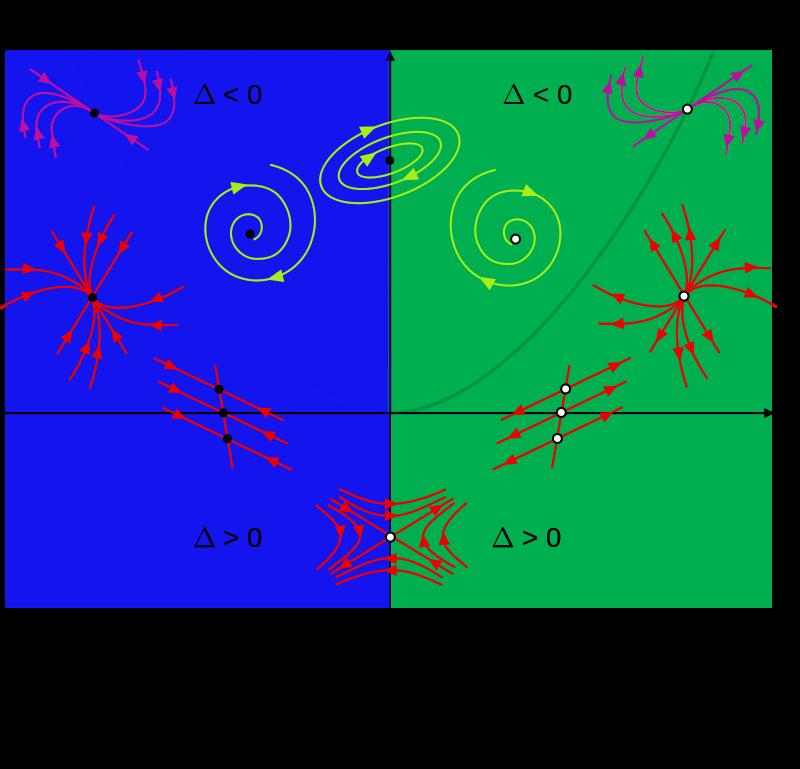
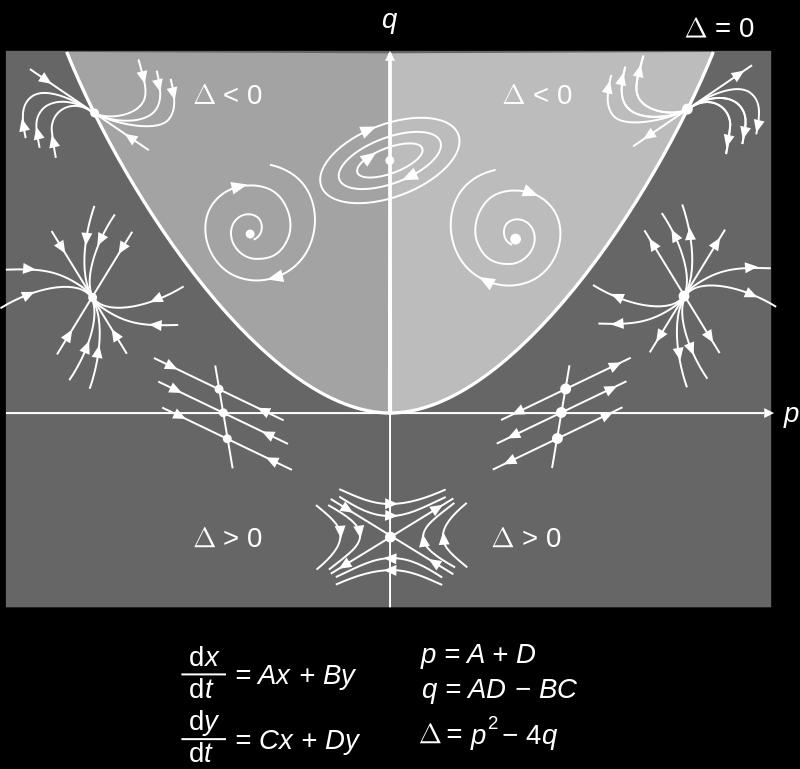
36 Differenciálegyenlet-rendszerek május / 36
Bevezetés az algebrába 2
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Differencia- és differenciálegy.-rsz. H607 2017-04-05
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Differencia- és differenciálegy.-rsz. H607 2017-04-05
Bevezetés az algebrába 2
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Mátrixfüggvények H607 2018-05-02 Wettl Ferenc
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Mátrixfüggvények H607 2018-05-02 Wettl Ferenc
Bevezetés az algebrába 2
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Alkalmazások H607 2018-05-14 Wettl Ferenc ALGEBRA
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Alkalmazások H607 2018-05-14 Wettl Ferenc ALGEBRA
3. Lineáris differenciálegyenletek
 3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
Lineáris algebra mérnököknek
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Lineáris algebra mérnököknek BMETE93BG20 Sajátérték, sajátvektor, sajátaltér Kf87 2017-11-21
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Lineáris algebra mérnököknek BMETE93BG20 Sajátérték, sajátvektor, sajátaltér Kf87 2017-11-21
3. előadás Stabilitás
 Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
Lineáris algebra mérnököknek
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Lineáris algebra mérnököknek BMETE93BG20 Sajátérték, sajátvektor, sajátaltér Kf81 2018-11-20
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Lineáris algebra mérnököknek BMETE93BG20 Sajátérték, sajátvektor, sajátaltér Kf81 2018-11-20
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
Mátrixok 2017 Mátrixok
 2017 számtáblázatok" : számok rendezett halmaza, melyben a számok helye két paraméterrel van meghatározva. Például lineáris egyenletrendszer együtthatómátrixa 2 x 1 + 4 x 2 = 8 1 x 1 + 3 x 2 = 1 ( 2 4
2017 számtáblázatok" : számok rendezett halmaza, melyben a számok helye két paraméterrel van meghatározva. Például lineáris egyenletrendszer együtthatómátrixa 2 x 1 + 4 x 2 = 8 1 x 1 + 3 x 2 = 1 ( 2 4
Mátrixfüggvények. Wettl Ferenc április 28. Wettl Ferenc Mátrixfüggvények április / 22
 Mátrixfüggvények Wettl Ferenc 2016. április 28. Wettl Ferenc Mátrixfüggvények 2016. április 28. 1 / 22 Tartalom 1 Diagonalizálható mátrixok függvényei 2 Mátrixfüggvény a Jordan-alakból 3 Mátrixfüggvény
Mátrixfüggvények Wettl Ferenc 2016. április 28. Wettl Ferenc Mátrixfüggvények 2016. április 28. 1 / 22 Tartalom 1 Diagonalizálható mátrixok függvényei 2 Mátrixfüggvény a Jordan-alakból 3 Mátrixfüggvény
Haladó lineáris algebra
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
Vektorterek. =a gyakorlatokon megoldásra ajánlott
 Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
λx f 1 (x) e λx f 2 (x) λe λx f 2 (x) + e λx f 2(x) e λx f 2 (x) Hasonlóan általában is elérhető sorműveletekkel, hogy csak f (j)
 e λx f 2 (x) λe λx f 2 (x) + e λx f 2(x) e λx f 2 (x) Hasonlóan általában is elérhető sorműveletekkel, hogy csak f (j)") Matematika A3 gyakorlat Energetika és Mechatronika BSc szakok, 016/17 ősz 10 feladatsor: Magasabbrendű lineáris differenciálegyenletek (megoldás) 1 Határozzuk meg az e λx, xe λx, x e λx,, x k 1 e λx függvények
Matematika A3 gyakorlat Energetika és Mechatronika BSc szakok, 016/17 ősz 10 feladatsor: Magasabbrendű lineáris differenciálegyenletek (megoldás) 1 Határozzuk meg az e λx, xe λx, x e λx,, x k 1 e λx függvények
Lineáris algebra Gyakorló feladatok
 Lineáris algebra Gyakorló feladatok. október.. Feladat: Határozzuk meg a, 4b, c és a b c vektorokat, ha a = (; ; ; ; b = (; ; ; ; c = ( ; ; ; ;.. Feladat: Határozzuk meg a, 4b, a, c és a b; c + b kifejezések
Lineáris algebra Gyakorló feladatok. október.. Feladat: Határozzuk meg a, 4b, c és a b c vektorokat, ha a = (; ; ; ; b = (; ; ; ; c = ( ; ; ; ;.. Feladat: Határozzuk meg a, 4b, a, c és a b; c + b kifejezések
Matematika III. harmadik előadás
 Matematika III. harmadik előadás Kézi Csaba Debreceni Egyetem, Műszaki Kar Debrecen, 2013/14 tanév, I. félév Kézi Csaba (DE) Matematika III. harmadik előadás 2013/14 tanév, I. félév 1 / 13 tétel Az y (x)
Matematika III. harmadik előadás Kézi Csaba Debreceni Egyetem, Műszaki Kar Debrecen, 2013/14 tanév, I. félév Kézi Csaba (DE) Matematika III. harmadik előadás 2013/14 tanév, I. félév 1 / 13 tétel Az y (x)
Differenciaegyenletek
 Differenciaegyenletek Losonczi László Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar Debrecen, 2009/10 tanév, I. félév Losonczi László (DE) Differenciaegyenletek 2009/10 tanév, I. félév 1 / 11
Differenciaegyenletek Losonczi László Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar Debrecen, 2009/10 tanév, I. félév Losonczi László (DE) Differenciaegyenletek 2009/10 tanév, I. félév 1 / 11
MODELLEK ÉS ALGORITMUSOK ELŐADÁS
 MODELLEK ÉS ALGORITMUSOK ELŐADÁS Szerkesztette: Balogh Tamás 214. december 7. Ha hibát találsz, kérlek jelezd a info@baloghtamas.hu e-mail címen! Ez a Mű a Creative Commons Nevezd meg! - Ne add el! - Így
MODELLEK ÉS ALGORITMUSOK ELŐADÁS Szerkesztette: Balogh Tamás 214. december 7. Ha hibát találsz, kérlek jelezd a info@baloghtamas.hu e-mail címen! Ez a Mű a Creative Commons Nevezd meg! - Ne add el! - Így
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve trigonometrikus alakban vannak megadva?
 = komolyabb bizonyítás (jeleshez) Ellenőrző kérdések 2006 ősz 1. Definiálja a komplex szám és műveleteinek fogalmát! 2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve
= komolyabb bizonyítás (jeleshez) Ellenőrző kérdések 2006 ősz 1. Definiálja a komplex szám és műveleteinek fogalmát! 2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve
9. Előadás. (9. előadás) Lineáris egyr.(3.), Sajátérték április / 35
 Lineáris egyr.(3.), Sajátérték április / 35") 9. Előadás (9. előadás) Lineáris egyr.(3.), Sajátérték 2019. április 24. 1 / 35 Portfólió-analízis Tegyük fel, hogy egy bank 4 különböző eszközbe fektet be (réz, búza, arany és kakaó). Az ügyfeleinek ezen
9. Előadás (9. előadás) Lineáris egyr.(3.), Sajátérték 2019. április 24. 1 / 35 Portfólió-analízis Tegyük fel, hogy egy bank 4 különböző eszközbe fektet be (réz, búza, arany és kakaó). Az ügyfeleinek ezen
1.7. Elsőrendű lineáris differenciálegyenlet-rendszerek
 7 Elsőrendű lineáris differenciálegyenlet-rendszerek Legyen n N, I R intervallum és A: I M n n (R), B: I R n folytonos függvények, és tekintsük az { y (x) = A(x)y(x) + B(x) y(ξ) = η kezdeti érték problémát,
7 Elsőrendű lineáris differenciálegyenlet-rendszerek Legyen n N, I R intervallum és A: I M n n (R), B: I R n folytonos függvények, és tekintsük az { y (x) = A(x)y(x) + B(x) y(ξ) = η kezdeti érték problémát,
6. feladatsor: Inhomogén lineáris differenciálegyenletek (megoldás)
") Matematika Ac gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 017/18 ősz 6. feladatsor: Inhomogén lineáris differenciálegyenletek (megoldás) 1. Írjunk fel egy olyan legalacsonyabbrendű valós,
Matematika Ac gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 017/18 ősz 6. feladatsor: Inhomogén lineáris differenciálegyenletek (megoldás) 1. Írjunk fel egy olyan legalacsonyabbrendű valós,
Feladatok a Gazdasági matematika II. tárgy gyakorlataihoz
 Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Megoldott feladatok november 30. n+3 szigorúan monoton csökken, 5. n+3. lim a n = lim. n+3 = 2n+3 n+4 2n+1
 Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Mátrix-exponens, Laplace transzformáció
 2016. április 4. 2016. április 11. LINEÁRIS DIFFERENCIÁLEGYENLET RENDSZEREK ÉS A MÁTRIX-EXPONENS KAPCSOLATA Feladat - ismétlés Tegyük fel, hogy A(t) = (a ik (t)), i, k = 1,..., n és b(t) folytonos mátrix-függvények
2016. április 4. 2016. április 11. LINEÁRIS DIFFERENCIÁLEGYENLET RENDSZEREK ÉS A MÁTRIX-EXPONENS KAPCSOLATA Feladat - ismétlés Tegyük fel, hogy A(t) = (a ik (t)), i, k = 1,..., n és b(t) folytonos mátrix-függvények
Matematika szigorlat június 17. Neptun kód:
 Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
15. LINEÁRIS EGYENLETRENDSZEREK
 15 LINEÁRIS EGYENLETRENDSZEREK 151 Lineáris egyenletrendszer, Gauss elimináció 1 Definíció Lineáris egyenletrendszernek nevezzük az (1) a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
15 LINEÁRIS EGYENLETRENDSZEREK 151 Lineáris egyenletrendszer, Gauss elimináció 1 Definíció Lineáris egyenletrendszernek nevezzük az (1) a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
1. Számsorok, hatványsorok, Taylor-sor, Fourier-sor
 . Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következő végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle belső konvergenciakritérium) A a n végtelen sor akkor és csakis
. Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következő végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle belső konvergenciakritérium) A a n végtelen sor akkor és csakis
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
differenciálegyenletek
 Állandó együtthatójú lineáris homogén differenciálegyenletek L[y] = y (n) + a 1y (n 1) + + a ny = 0 a i R (1) a valós, állandó együtthatójú lineáris homogén n-ed rendű differenciálegyenlet Megoldását y
Állandó együtthatójú lineáris homogén differenciálegyenletek L[y] = y (n) + a 1y (n 1) + + a ny = 0 a i R (1) a valós, állandó együtthatójú lineáris homogén n-ed rendű differenciálegyenlet Megoldását y
1. zárthelyi,
 1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
Numerikus matematika vizsga
 1. Az a = 2, t = 4, k = 3, k + = 2 számábrázolási jellemzők mellett hány pozitív, normalizált lebegőpontos szám ábrázolható? Adja meg a legnagyobb ábrázolható számot! Mi lesz a 0.8-hoz rendelt lebegőpontos
1. Az a = 2, t = 4, k = 3, k + = 2 számábrázolási jellemzők mellett hány pozitív, normalizált lebegőpontos szám ábrázolható? Adja meg a legnagyobb ábrázolható számot! Mi lesz a 0.8-hoz rendelt lebegőpontos
Vektorterek. Wettl Ferenc február 17. Wettl Ferenc Vektorterek február / 27
 Vektorterek Wettl Ferenc 2015. február 17. Wettl Ferenc Vektorterek 2015. február 17. 1 / 27 Tartalom 1 Egyenletrendszerek 2 Algebrai struktúrák 3 Vektortér 4 Bázis, dimenzió 5 Valós mátrixok és egyenletrendszerek
Vektorterek Wettl Ferenc 2015. február 17. Wettl Ferenc Vektorterek 2015. február 17. 1 / 27 Tartalom 1 Egyenletrendszerek 2 Algebrai struktúrák 3 Vektortér 4 Bázis, dimenzió 5 Valós mátrixok és egyenletrendszerek
Testek. 16. Legyen z = 3 + 4i, w = 3 + i. Végezzük el az alábbi. a) (2 4), Z 5, b) (1, 0, 0, 1, 1) (1, 1, 1, 1, 0), Z 5 2.
 (2 4), Z 5, b) (1, 0, 0, 1, 1) (1, 1, 1, 1, 0), Z 5 2.") Vektorok. Melyek egyenlőek az alábbi vektorok közül? (a) (, 2, 0), (b) az (, 0, ) pontból a (2, 2, ) pontba mutató vektor, (c) ( 2,, ) ( 2,, 2), (d) [ 2 0 ], (e) 2. 0 2. Írjuk fel az x + y + 2z = 0 és
Vektorok. Melyek egyenlőek az alábbi vektorok közül? (a) (, 2, 0), (b) az (, 0, ) pontból a (2, 2, ) pontba mutató vektor, (c) ( 2,, ) ( 2,, 2), (d) [ 2 0 ], (e) 2. 0 2. Írjuk fel az x + y + 2z = 0 és
Differenciálegyenlet rendszerek
 Differenciálegyenlet rendszerek (A kezdeti érték probléma. Lineáris differenciálegyenlet rendszerek, magasabb rendű lineáris egyenletek.) Szili László: Modellek és algoritmusok ea+gyak jegyzet alapján
Differenciálegyenlet rendszerek (A kezdeti érték probléma. Lineáris differenciálegyenlet rendszerek, magasabb rendű lineáris egyenletek.) Szili László: Modellek és algoritmusok ea+gyak jegyzet alapján
92 MAM143A előadásjegyzet, 2008/2009. x = f(t,x). x = f(x), (6.1)
. x = f(x), (6.1)") 9 MAM43A előadásjegyzet, 8/9 6. Stabilitáselmélet 6.. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x.
9 MAM43A előadásjegyzet, 8/9 6. Stabilitáselmélet 6.. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x.
Modellek és Algoritmusok - 2.ZH Elmélet
 Modellek és Algoritmusok - 2.ZH Elmélet Ha hibát elírást találsz kérlek jelezd: sellei_m@hotmail.com A fríss/javított változat elérhet : people.inf.elte.hu/semsaai/modalg/ 2.ZH Számonkérés: 3.EA-tól(DE-ek)
Modellek és Algoritmusok - 2.ZH Elmélet Ha hibát elírást találsz kérlek jelezd: sellei_m@hotmail.com A fríss/javított változat elérhet : people.inf.elte.hu/semsaai/modalg/ 2.ZH Számonkérés: 3.EA-tól(DE-ek)
Lineáris leképezések. 2. Lineáris-e az f : R 2 R 2 f(x, y) = (x + y, x 2 )
 = (x + y, x 2 )") Lineáris leképezések 1 Lineáris-e az f : R 2 R 2 f(x, y = (3x + 2y, x y leképezés? A linearitáshoz ellen riznünk kell, hogy a leképzés additív és homogén Legyen x = (x 1, R 2, y = (y 1, y 2 R 2, c R Ekkor
Lineáris leképezések 1 Lineáris-e az f : R 2 R 2 f(x, y = (3x + 2y, x y leképezés? A linearitáshoz ellen riznünk kell, hogy a leképzés additív és homogén Legyen x = (x 1, R 2, y = (y 1, y 2 R 2, c R Ekkor
4. Lineáris rendszerek
 60 Hartung Ferenc: Differenciálegyenletek, MA22i, MA623d, 2006/07 4 Lineáris rendszerek 4 Lineáris algebrai előismeretek Legyen A egy n n-es mátrix, I az n n-es egységmátrix A pλ := deta λi n-edfokú polinomot
60 Hartung Ferenc: Differenciálegyenletek, MA22i, MA623d, 2006/07 4 Lineáris rendszerek 4 Lineáris algebrai előismeretek Legyen A egy n n-es mátrix, I az n n-es egységmátrix A pλ := deta λi n-edfokú polinomot
Kvadratikus alakok és euklideszi terek (előadásvázlat, október 5.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Kvadratikus alakok és euklideszi terek (előadásvázlat, 0. október 5.) Maróti Miklós, Kátai-Urbán Kamilla Az előadáshoz ajánlott jegyzet: Szabó László: Bevezetés a lineáris algebrába, Polygon Kiadó, Szeged,
Kvadratikus alakok és euklideszi terek (előadásvázlat, 0. október 5.) Maróti Miklós, Kátai-Urbán Kamilla Az előadáshoz ajánlott jegyzet: Szabó László: Bevezetés a lineáris algebrába, Polygon Kiadó, Szeged,
Differenciálegyenletek
 Differenciálegyenletek Losonczi László Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar Debrecen, 2011/12 tanév, I. félév Losonczi László (DE) Differenciálegyenletek 2011/12 tanév, I. félév 1 /
Differenciálegyenletek Losonczi László Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar Debrecen, 2011/12 tanév, I. félév Losonczi László (DE) Differenciálegyenletek 2011/12 tanév, I. félév 1 /
Alkalmazott algebra. Lineáris leképezések EIC. Wettl Ferenc ALGEBRA TANSZÉK BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK )
") B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Alkalmazott algebra BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK ) Lineáris leképezések
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Alkalmazott algebra BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK ) Lineáris leképezések
Differenciálegyenletek gyakorlat december 5.
 Differenciálegyenletek gyakorlat Kocsis Albert Tihamér Németh Adrián 05 december 5 Ismétlés Integrálás Newton Leibniz-formula Integrálás és alapműveletek wwwwolframalphacom Alapintegrálok sin x dx = cos
Differenciálegyenletek gyakorlat Kocsis Albert Tihamér Németh Adrián 05 december 5 Ismétlés Integrálás Newton Leibniz-formula Integrálás és alapműveletek wwwwolframalphacom Alapintegrálok sin x dx = cos
Lineáris algebra 2. Filip Ferdinánd december 7. siva.banki.hu/jegyzetek
 Lineáris algebra 2 Filip Ferdinánd filipferdinand@bgkuni-obudahu sivabankihu/jegyzetek 2015 december 7 Filip Ferdinánd 2016 februar 9 Lineáris algebra 2 1 / 37 Az el adás vázlata Determináns Determináns
Lineáris algebra 2 Filip Ferdinánd filipferdinand@bgkuni-obudahu sivabankihu/jegyzetek 2015 december 7 Filip Ferdinánd 2016 februar 9 Lineáris algebra 2 1 / 37 Az el adás vázlata Determináns Determináns
VEKTORTEREK I. VEKTORTÉR, ALTÉR, GENERÁTORRENDSZER október 15. Irodalom. További ajánlott feladatok
 VEKTORTEREK I. VEKTORTÉR, ALTÉR, GENERÁTORRENDSZER 2004. október 15. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak az előadáson, másrészt megtalálják
VEKTORTEREK I. VEKTORTÉR, ALTÉR, GENERÁTORRENDSZER 2004. október 15. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak az előadáson, másrészt megtalálják
12. Mikor nevezünk egy részhalmazt nyíltnak, illetve zártnak a valós számok körében?
 Ellenörző Kérdések 1. Mit jelent az, hogy egy f : A B függvény injektív, szürjektív, illetve bijektív? 2. Mikor nevezünk egy függvényt invertálhatónak? 3. Definiálja a komplex szám és műveleteinek fogalmát!
Ellenörző Kérdések 1. Mit jelent az, hogy egy f : A B függvény injektív, szürjektív, illetve bijektív? 2. Mikor nevezünk egy függvényt invertálhatónak? 3. Definiálja a komplex szám és műveleteinek fogalmát!
y + a y + b y = r(x),
,") Definíció 1 A másodrendű, állandó együtthatós, lineáris differenciálegyenletek általános alakja y + a y + b y = r(x), ( ) ahol a és b valós számok, r(x) pedig adott függvény. Ha az r(x) függvény az azonosan
Definíció 1 A másodrendű, állandó együtthatós, lineáris differenciálegyenletek általános alakja y + a y + b y = r(x), ( ) ahol a és b valós számok, r(x) pedig adott függvény. Ha az r(x) függvény az azonosan
Lineáris algebra. =0 iє{1,,n}
 Matek A2 (Lineáris algebra) Felhasználtam a Szilágyi Brigittás órai jegyzeteket, néhol a Thomas féle Kalkulus III könyvet. A hibákért felelosséget nem vállalok. Hiányosságok vannak(1. órai lin algebrai
Matek A2 (Lineáris algebra) Felhasználtam a Szilágyi Brigittás órai jegyzeteket, néhol a Thomas féle Kalkulus III könyvet. A hibákért felelosséget nem vállalok. Hiányosságok vannak(1. órai lin algebrai
Baran Ágnes, Burai Pál, Noszály Csaba. Gyakorlat Differenciálegyenletek
 Matematika Mérnököknek 2. Baran Ágnes, Burai Pál, Noszály Csaba Gyakorlat Differenciálegyenletek Baran Ágnes, Burai Pál, Noszály Csaba Matematika Mérnököknek 2. 1.-2. Gyakorlat 1 / 42 Numerikus differenciálás
Matematika Mérnököknek 2. Baran Ágnes, Burai Pál, Noszály Csaba Gyakorlat Differenciálegyenletek Baran Ágnes, Burai Pál, Noszály Csaba Matematika Mérnököknek 2. 1.-2. Gyakorlat 1 / 42 Numerikus differenciálás
Lin.Alg.Zh.1 feladatok
 Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
9. Előadás. Megyesi László: Lineáris algebra, oldal. 9. előadás Mátrix inverze, Leontyev-modell
 9. Előadás Megyesi László: Lineáris algebra, 75. 84. oldal. Gondolkodnivalók Mátrix rangja 1. Gondolkodnivaló Tegyük fel, hogy egy elemi bázistranszformáció kezdetekor a sor- és oszlopindexek sorban helyezkednek
9. Előadás Megyesi László: Lineáris algebra, 75. 84. oldal. Gondolkodnivalók Mátrix rangja 1. Gondolkodnivaló Tegyük fel, hogy egy elemi bázistranszformáció kezdetekor a sor- és oszlopindexek sorban helyezkednek
Differenciálegyenletek. Vajda István március 4.
 Analízis előadások Vajda István 2009. március 4. Függvényegyenletek Definíció: Az olyan egyenleteket, amelyekben a meghatározandó ismeretlen függvény, függvényegyenletnek nevezzük. Függvényegyenletek Definíció:
Analízis előadások Vajda István 2009. március 4. Függvényegyenletek Definíció: Az olyan egyenleteket, amelyekben a meghatározandó ismeretlen függvény, függvényegyenletnek nevezzük. Függvényegyenletek Definíció:
Funkcionálanalízis. n=1. n=1. x n y n. n=1
 Funkcionálanalízis 2011/12 tavaszi félév - 2. előadás 1.4. Lényeges alap-terek, példák Sorozat terek (Folytatás.) C: konvergens sorozatok tere. A tér pontjai sorozatok: x = (x n ). Ezen belül C 0 a nullsorozatok
Funkcionálanalízis 2011/12 tavaszi félév - 2. előadás 1.4. Lényeges alap-terek, példák Sorozat terek (Folytatás.) C: konvergens sorozatok tere. A tér pontjai sorozatok: x = (x n ). Ezen belül C 0 a nullsorozatok
Utolsó el adás. Wettl Ferenc BME Algebra Tanszék, Wettl Ferenc (BME) Utolsó el adás / 20
 Utolsó el adás / 20") Utolsó el adás Wettl Ferenc BME Algebra Tanszék, http://www.math.bme.hu/~wettl 2013-12-09 Wettl Ferenc (BME) Utolsó el adás 2013-12-09 1 / 20 1 Dierenciálegyenletek megoldhatóságának elmélete 2 Parciális
Utolsó el adás Wettl Ferenc BME Algebra Tanszék, http://www.math.bme.hu/~wettl 2013-12-09 Wettl Ferenc (BME) Utolsó el adás 2013-12-09 1 / 20 1 Dierenciálegyenletek megoldhatóságának elmélete 2 Parciális
LINEÁRIS ALGEBRA. matematika alapszak. Euklideszi terek. SZTE Bolyai Intézet, őszi félév. Euklideszi terek LINEÁRIS ALGEBRA 1 / 40
 LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
5.1. Autonóm nemlineáris rendszerek
 5. Stabilitáselmélet 87 5. Stabilitáselmélet 5.1. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x).
5. Stabilitáselmélet 87 5. Stabilitáselmélet 5.1. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x).
Lineáris algebra. (közgazdászoknak)
") Lineáris algebra (közgazdászoknak) 10A103 FELADATOK A GYAKORLATRA (3.) 2018/2019. tavaszi félév Lineáris egyenletrendszerek 3.1. Feladat. Oldjuk meg az alábbi lineáris egyenletrendszereket Gauss-eliminációval
Lineáris algebra (közgazdászoknak) 10A103 FELADATOK A GYAKORLATRA (3.) 2018/2019. tavaszi félév Lineáris egyenletrendszerek 3.1. Feladat. Oldjuk meg az alábbi lineáris egyenletrendszereket Gauss-eliminációval
1. Házi feladat. Határidő: I. Legyen f : R R, f(x) = x 2, valamint. d : R + 0 R+ 0
 = x 2, valamint. d : R + 0 R+ 0") I. Legyen f : R R, f(x) = 1 1 + x 2, valamint 1. Házi feladat d : R + 0 R+ 0 R (x, y) f(x) f(y). 1. Igazoljuk, hogy (R + 0, d) metrikus tér. 2. Adjuk meg az x {0, 3} pontok és r {1, 2} esetén a B r (x)
I. Legyen f : R R, f(x) = 1 1 + x 2, valamint 1. Házi feladat d : R + 0 R+ 0 R (x, y) f(x) f(y). 1. Igazoljuk, hogy (R + 0, d) metrikus tér. 2. Adjuk meg az x {0, 3} pontok és r {1, 2} esetén a B r (x)
1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1
![1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1](/thumbs/88/116339870.jpg "1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1") numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
Lin.Alg.Zh.1 feladatok
 LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
Lineáris algebra gyakorlat
 Lineáris algebra gyakorlat 0. gyakorlat Gyakorlatvezet : Bogya Norbert 202. április 23. Sajátérték, sajátvektor, sajátaltér Tartalom Sajátérték, sajátvektor, sajátaltér 2 Gyakorló feladatok a zh-ra (rutinfeladatok)
Lineáris algebra gyakorlat 0. gyakorlat Gyakorlatvezet : Bogya Norbert 202. április 23. Sajátérték, sajátvektor, sajátaltér Tartalom Sajátérték, sajátvektor, sajátaltér 2 Gyakorló feladatok a zh-ra (rutinfeladatok)
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
Lineáris leképezések (előadásvázlat, szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
0-49 pont: elégtelen, pont: elégséges, pont: közepes, pont: jó, pont: jeles
 Matematika szigorlat, Mérnök informatikus szak I. 2013. jan. 10. Név: Neptun kód: Idő: 180 perc Elm.: 1. f. 2. f. 3. f. 4. f. 5. f. Fel. össz.: Össz.: Oszt.: Az elérhető pontszám 40 (elmélet) + 60 (feladatok)
Matematika szigorlat, Mérnök informatikus szak I. 2013. jan. 10. Név: Neptun kód: Idő: 180 perc Elm.: 1. f. 2. f. 3. f. 4. f. 5. f. Fel. össz.: Össz.: Oszt.: Az elérhető pontszám 40 (elmélet) + 60 (feladatok)
Saj at ert ek-probl em ak febru ar 26.
 Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
5. Lineáris rendszerek
 66 MAM43A előadásjegyzet, 2008/2009 5 Lineáris rendszerek 5 Lineáris algebrai előismeretek Tekintsük az a x + a 2 x 2 = b 5 a 2 x + a 22 x 2 = b 2 52 lineáris egyenletrendszert Az egyenletben szereplő
66 MAM43A előadásjegyzet, 2008/2009 5 Lineáris rendszerek 5 Lineáris algebrai előismeretek Tekintsük az a x + a 2 x 2 = b 5 a 2 x + a 22 x 2 = b 2 52 lineáris egyenletrendszert Az egyenletben szereplő
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Matematika II képletek. 1 sin xdx =, cos 2 x dx = sh 2 x dx = 1 + x 2 dx = 1 x. cos xdx =,
 Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Differenciálegyenletek december 13.
 Differenciálegyenletek 2018. december 13. Elsőrendű DE Definíció. Az elsőrendű differenciálegyenlet általános alakja y = f (x, y), ahol f (x, y) adott kétváltozós függvény. Minden y = y(x) függvény, amire
Differenciálegyenletek 2018. december 13. Elsőrendű DE Definíció. Az elsőrendű differenciálegyenlet általános alakja y = f (x, y), ahol f (x, y) adott kétváltozós függvény. Minden y = y(x) függvény, amire
Intergrált Intenzív Matematika Érettségi
 . Adott a mátri, determináns determináns, ahol,, d Számítsd ki:. b) Igazold, hogy a b c. Adott a az 6 0 egyenlet megoldásai. a). c) Számítsd ki a d determináns értékét. d c a b determináns, ahol abc,,.
. Adott a mátri, determináns determináns, ahol,, d Számítsd ki:. b) Igazold, hogy a b c. Adott a az 6 0 egyenlet megoldásai. a). c) Számítsd ki a d determináns értékét. d c a b determináns, ahol abc,,.
Bevezetés az algebrába 1
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 1 BMETE92AX23 Egyenletrendszerek H406 2016-10-03 Wettl Ferenc
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 1 BMETE92AX23 Egyenletrendszerek H406 2016-10-03 Wettl Ferenc
Differenciálegyenletek
 DE 1 Ebben a részben I legyen mindig pozitív hosszúságú intervallum DE Definíció: differenciálegyenlet Ha D n+1 nyílt halmaz, f:d folytonos függvény, akkor az y (n) (x) f ( x, y(x), y'(x),..., y (n-1)
DE 1 Ebben a részben I legyen mindig pozitív hosszúságú intervallum DE Definíció: differenciálegyenlet Ha D n+1 nyílt halmaz, f:d folytonos függvény, akkor az y (n) (x) f ( x, y(x), y'(x),..., y (n-1)
A KroneckerCapelli-tételb l következik, hogy egy Bx = 0 homogén lineáris egyenletrendszernek
 10. gyakorlat Mátrixok sajátértékei és sajátvektorai Azt mondjuk, hogy az A M n mátrixnak a λ IR szám a sajátértéke, ha létezik olyan x IR n, x 0 vektor, amelyre Ax = λx. Ekkor az x vektort az A mátrix
10. gyakorlat Mátrixok sajátértékei és sajátvektorai Azt mondjuk, hogy az A M n mátrixnak a λ IR szám a sajátértéke, ha létezik olyan x IR n, x 0 vektor, amelyre Ax = λx. Ekkor az x vektort az A mátrix
10. Előadás. Megyesi László: Lineáris algebra, oldal. 10. előadás Sajátérték, Kvadaratikus alak
 10. Előadás Megyesi László: Lineáris algebra, 98. 108. oldal. Gondolkodnivalók Mátrix inverze 1. Gondolkodnivaló Igazoljuk, hogy invertálható trianguláris mátrixok inverze is trianguláris. Bizonyítás:
10. Előadás Megyesi László: Lineáris algebra, 98. 108. oldal. Gondolkodnivalók Mátrix inverze 1. Gondolkodnivaló Igazoljuk, hogy invertálható trianguláris mátrixok inverze is trianguláris. Bizonyítás:
Matematika A3 1. ZH+megoldás
 Matematika A3 1. ZH+megoldás 2008. október 17. 1. Feladat Egy 10 literes kezdetben tiszta vizet tartalmazó tartályba 2 l/min sebesséeggel 0.3 kg/l sótartalmú víz Áramlik be, amely elkeveredik a benne lévő
Matematika A3 1. ZH+megoldás 2008. október 17. 1. Feladat Egy 10 literes kezdetben tiszta vizet tartalmazó tartályba 2 l/min sebesséeggel 0.3 kg/l sótartalmú víz Áramlik be, amely elkeveredik a benne lévő
Komplex számok. Wettl Ferenc előadása alapján Wettl Ferenc előadása alapján Komplex számok / 18
 Komplex számok Wettl Ferenc előadása alapján 2015.09.23. Wettl Ferenc előadása alapján Komplex számok 2015.09.23. 1 / 18 Tartalom 1 Számok A számfogalom bővülése 2 Algebrai alak Trigonometrikus alak Egységgyökök
Komplex számok Wettl Ferenc előadása alapján 2015.09.23. Wettl Ferenc előadása alapján Komplex számok 2015.09.23. 1 / 18 Tartalom 1 Számok A számfogalom bővülése 2 Algebrai alak Trigonometrikus alak Egységgyökök
1. Határozzuk meg, hogy mikor egyenlő egymással a következő két mátrix: ; B = 8 7 2, 5 1. Számítsuk ki az A + B, A B, 3A, B mátrixokat!
 . Mátrixok. Határozzuk meg, hogy mikor egyenlő egymással a következő két mátrix: [ ] [ ] π a A = ; B = 8 7, 5 x. 7, 5 ln y. Legyen 4 A = 4 ; B = 5 5 Számítsuk ki az A + B, A B, A, B mátrixokat!. Oldjuk
. Mátrixok. Határozzuk meg, hogy mikor egyenlő egymással a következő két mátrix: [ ] [ ] π a A = ; B = 8 7, 5 x. 7, 5 ln y. Legyen 4 A = 4 ; B = 5 5 Számítsuk ki az A + B, A B, A, B mátrixokat!. Oldjuk
6. gyakorlat. Gelle Kitti. Csendes Tibor Somogyi Viktor. London András. jegyzetei alapján
 Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
A lineáris algebra forrásai: egyenletrendszerek, vektorok
 A lineáris algebra forrásai: egyenletrendszerek, vektorok 2016. február 23. A lineáris algebra forrásai: egyenletrendszerek, vektorok 2016. február 23. 1 / 75 Tartalom 1 Vektor A 2- és 3-dimenziós tér
A lineáris algebra forrásai: egyenletrendszerek, vektorok 2016. február 23. A lineáris algebra forrásai: egyenletrendszerek, vektorok 2016. február 23. 1 / 75 Tartalom 1 Vektor A 2- és 3-dimenziós tér
9. Előadás. Megyesi László: Lineáris algebra, oldal. 9. előadás Mátrix inverze, mátrixegyenlet
 9. Előadás Megyesi László: Lineáris algebra, 75. 84. oldal. Gondolkodnivalók Mátrix rangja 1. Gondolkodnivaló Határozzuk meg a p valós paraméter értékétől függően a következő mátrix rangját: p 3 1 2 2
9. Előadás Megyesi László: Lineáris algebra, 75. 84. oldal. Gondolkodnivalók Mátrix rangja 1. Gondolkodnivaló Határozzuk meg a p valós paraméter értékétől függően a következő mátrix rangját: p 3 1 2 2
1. Homogén lineáris egyenletrendszer megoldástere
 X HOMOGÉN LINEÁRIS EGYENLET- RENDSZEREK 1 Homogén lineáris egyenletrendszer megoldástere Homogén lineáris egyenletrendszer definíciója már szerepelt Olyan lineáris egyenletrendszert nevezünk homogénnek,
X HOMOGÉN LINEÁRIS EGYENLET- RENDSZEREK 1 Homogén lineáris egyenletrendszer megoldástere Homogén lineáris egyenletrendszer definíciója már szerepelt Olyan lineáris egyenletrendszert nevezünk homogénnek,
Feladatok a Diffrenciálegyenletek IV témakörhöz. 1. Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel.
 Feladatok a Diffrenciálegyenletek IV témakörhöz 1 Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel (a) y 3y 4y = 3e t (b) y 3y 4y = sin t (c) y 3y 4y = 8t
Feladatok a Diffrenciálegyenletek IV témakörhöz 1 Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel (a) y 3y 4y = 3e t (b) y 3y 4y = sin t (c) y 3y 4y = 8t
Első zárthelyi dolgozat megoldásai biomatematikából * A verzió
 Első zárthelyi dolgozat megoldásai biomatematikából * A verzió Elméleti kérdések: E. Mikor nevezünk egy gráfot gyengén és mikor erősen összefüggőnek? Adjon példát gyengén összefüggő de erősen nem összefüggő
Első zárthelyi dolgozat megoldásai biomatematikából * A verzió Elméleti kérdések: E. Mikor nevezünk egy gráfot gyengén és mikor erősen összefüggőnek? Adjon példát gyengén összefüggő de erősen nem összefüggő
Folytonos rendszeregyenletek megoldása. 1. Folytonos idejű (FI) rendszeregyenlet általános alakja
 rendszeregyenlet általános alakja") Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
LINEÁRIS EGYENLETRENDSZEREK október 12. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak
 LINEÁRIS EGYENLETRENDSZEREK 004. október. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak az előadáson, másrészt megtalálják a jegyzetben: Szabó László:
LINEÁRIS EGYENLETRENDSZEREK 004. október. Irodalom A fogalmakat, definíciókat illetően két forrásra támaszkodhatnak: ezek egyrészt elhangzanak az előadáson, másrészt megtalálják a jegyzetben: Szabó László:
1. Bázistranszformáció
 1. Bázistranszformáció Transzformáció mátrixa új bázisban A bázistranszformáció képlete (Freud, 5.8.1. Tétel) Legyenek b és d bázisok V -ben, ] v V és A Hom(V). Jelölje S = [[d 1 ] b,...,[d n ] b T n n
1. Bázistranszformáció Transzformáció mátrixa új bázisban A bázistranszformáció képlete (Freud, 5.8.1. Tétel) Legyenek b és d bázisok V -ben, ] v V és A Hom(V). Jelölje S = [[d 1 ] b,...,[d n ] b T n n
Számsorok. 1. Definíció. Legyen adott valós számoknak egy (a n ) n=1 = (a 1, a 2,..., a n,...) végtelen sorozata. Az. a n
 n=1 = (a 1, a 2,..., a n,...) végtelen sorozata. Az. a n") Számsorok 1. Definíció. Legyen adott valós számoknak egy (a n ) = (a 1, a 2,..., a n,...) végtelen sorozata. Az végtelen összeget végtelen számsornak (sornak) nevezzük. Az a n számot a sor n-edik tagjának
Számsorok 1. Definíció. Legyen adott valós számoknak egy (a n ) = (a 1, a 2,..., a n,...) végtelen sorozata. Az végtelen összeget végtelen számsornak (sornak) nevezzük. Az a n számot a sor n-edik tagjának
1/1. Házi feladat. 1. Legyen p és q igaz vagy hamis matematikai kifejezés. Mutassuk meg, hogy
 /. Házi feladat. Legyen p és q igaz vagy hamis matematikai kifejezés. Mutassuk meg, hogy mindig igaz. (p (( p) q)) (( p) ( q)). Igazoljuk, hogy minden A, B és C halmazra A \ (B C) = (A \ B) (A \ C) teljesül.
/. Házi feladat. Legyen p és q igaz vagy hamis matematikai kifejezés. Mutassuk meg, hogy mindig igaz. (p (( p) q)) (( p) ( q)). Igazoljuk, hogy minden A, B és C halmazra A \ (B C) = (A \ B) (A \ C) teljesül.
Sorozatok, sorok, függvények határértéke és folytonossága Leindler Schipp - Analízis I. könyve + jegyzetek, kidolgozások alapján
 Sorozatok, sorok, függvények határértéke és folytonossága Leindler Schipp - Analízis I. könyve + jegyzetek, kidolgozások alapján Számsorozatok, vektorsorozatok konvergenciája Def.: Számsorozatok értelmezése:
Sorozatok, sorok, függvények határértéke és folytonossága Leindler Schipp - Analízis I. könyve + jegyzetek, kidolgozások alapján Számsorozatok, vektorsorozatok konvergenciája Def.: Számsorozatok értelmezése:
Diszkrét matematika I., 12. előadás Dr. Takách Géza NyME FMK Informatikai Intézet takach november 30.
 1 Diszkrét matematika I, 12 előadás Dr Takách Géza NyME FMK Informatikai Intézet takach@infnymehu http://infnymehu/ takach 2005 november 30 Vektorok Definíció Egy tetszőleges n pozitív egész számra n-komponensű
1 Diszkrét matematika I, 12 előadás Dr Takách Géza NyME FMK Informatikai Intézet takach@infnymehu http://infnymehu/ takach 2005 november 30 Vektorok Definíció Egy tetszőleges n pozitív egész számra n-komponensű
Gyakorló feladatok I.
 Gyakorló feladatok I. a Matematika Aa Vektorüggvények tárgyhoz (D D5 kurzusok) Összeállította: Szili László Ajánlott irodalmak:. G.B. Thomas, M.D. Weir, J. Hass, F.R. Giordano: Thomas-féle KALKULUS I.,
Gyakorló feladatok I. a Matematika Aa Vektorüggvények tárgyhoz (D D5 kurzusok) Összeállította: Szili László Ajánlott irodalmak:. G.B. Thomas, M.D. Weir, J. Hass, F.R. Giordano: Thomas-féle KALKULUS I.,
Differenciálegyenletek gyakorlat Matematika BSc II/2, elemző szakirány
 A sebesség fogalmának szemléltetése az Differenciálegyenletek gyakorlat Matematika BSc II/, elemző szakirány. gyakorlat ẋ(t) = lim h 0 x(t+h) x(t) h képlet alapján, ahol t jelöli az időt, x pedig az elmozdulást.
A sebesség fogalmának szemléltetése az Differenciálegyenletek gyakorlat Matematika BSc II/, elemző szakirány. gyakorlat ẋ(t) = lim h 0 x(t+h) x(t) h képlet alapján, ahol t jelöli az időt, x pedig az elmozdulást.
i=1 λ iv i = 0 előállítása, melynél valamelyik λ i
 Az informatikus lineáris algebra dolgozat C részének lehetséges kérdései Az alábbi listában azok az állítások, tételek szerepelnek, melyeket a vizsgadolgozat C részében kérdezhetünk. Azok érnek 6 pontot,
Az informatikus lineáris algebra dolgozat C részének lehetséges kérdései Az alábbi listában azok az állítások, tételek szerepelnek, melyeket a vizsgadolgozat C részében kérdezhetünk. Azok érnek 6 pontot,
Polinomok maradékos osztása
 14. előadás: Racionális törtfüggvények integrálása Szabó Szilárd Polinomok maradékos osztása Legyenek P, Q valós együtthatós polinomok valamely x határozatlanban. Feltesszük, hogy deg(q) > 0. Tétel Létezik
14. előadás: Racionális törtfüggvények integrálása Szabó Szilárd Polinomok maradékos osztása Legyenek P, Q valós együtthatós polinomok valamely x határozatlanban. Feltesszük, hogy deg(q) > 0. Tétel Létezik
Numerikus módszerek 1.
 Numerikus módszerek 1. 10. előadás: Nemlineáris egyenletek numerikus megoldása Lócsi Levente ELTE IK 2013. november 18. Tartalomjegyzék 1 Bolzano-tétel, intervallumfelezés 2 Fixponttételek, egyszerű iterációk
Numerikus módszerek 1. 10. előadás: Nemlineáris egyenletek numerikus megoldása Lócsi Levente ELTE IK 2013. november 18. Tartalomjegyzék 1 Bolzano-tétel, intervallumfelezés 2 Fixponttételek, egyszerű iterációk
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Differenciálhatóság H607, EIC 2019-03-14 Wettl
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Differenciálhatóság H607, EIC 2019-03-14 Wettl
7. gyakorlat megoldásai
 7. gyakorlat megoldásai Komple számok, sajátértékek, sajátvektorok F1. Legyen z 1 = + i és z = 1 i. Számoljuk ki az alábbiakat: z 1 z 1 + z, z 1 z, z 1 z,, z 1, z 1. z M1. A szorzásnál használjuk, hogy
7. gyakorlat megoldásai Komple számok, sajátértékek, sajátvektorok F1. Legyen z 1 = + i és z = 1 i. Számoljuk ki az alábbiakat: z 1 z 1 + z, z 1 z, z 1 z,, z 1, z 1. z M1. A szorzásnál használjuk, hogy
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport
 Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,