Farkas Gyula Szakkollégium Bit- és számtologatók. Parametrikus görbék és felületek ábrázolása március 8., 22. Róth Ágoston
|
|
|
- Győző Pap
- 5 évvel ezelőtt
- Látták:
Átírás

1 Farkas Gyula Szakkollégium Bit- és számtologatók Parametrikus görbék és felületek ábrázolása március Róth Ágoston
2 vectors2d.h class CSquare2D; // később jelenik meg a leírása class CMesh2D; // később jelenik meg a leírása class CVector2D friend CSquare2D; friend CMesh2D; friend CVector2D operator * (const CVector2D &v float lambda); friend CVector2D operator * (float lambda const CVector2D &v); private: float x y; public: CVector2D(float x0.0ffloat y0.0f); // módosító metódusok setx(float x); sety(float y); updateall(float x float y); // néhány operátor túlterhelése CVector2D operator + (const CVector2D &v); CVector2D& operator + (const CVector2D &v); CVector2D operator - (const CVector2D &v); CVector2D& operator - (const CVector2D &v); float operator * (const CVector2D& v); CVector2D& operator * (float lambda); // vektort skáláz scale(float lambdax float lambday); // vektort egységnyi hosszúságúra alakít normalize(); ; // lekérdező metódusok float getx() const; float gety() const; float norm() const;
3 vectors3d.h class CSquare3D; // később jelenik meg a leírása class CMesh3D; // később jelenik meg a leírása class CVector3D friend CSquare3D; friend CMesh3D; friend CVector3D operator * (const CVector3D &v float lambda); friend CVector3D operator * (float lambda const CVector3D &v); private: float x y z; public: CVector3D(float x0.0f float y0.0f float z0.0f); setx(float x); sety(float y); setz(float z); updateall(float x float y float z); CVector3D operator + (const CVector3D &v); CVector3D& operator + (const CVector3D &v); CVector3D operator - (const CVector3D &v); float operator * (const CVector3D &v1 const CVector3D &v2); CVector3D& operator * (float lambda); CVector3D& operator - (const CVector3D &v); CVector3D operator % (const CVector3D &v); // vektoriális szorzat CVector3D& operator % (const CVector3D &v); // vektoriális szorzat float float float float scale(float lambdax float lambday float lambdaz); normalize(); getx() const; gety() const; getz() const; norm() const; ; CVector2D orthoprojection(const CVector3D &lightdir); // merőleges vetítés CVector2D perspprojection(float eyedistance); // perspektívikus vetítés rotateleft(float alfa); // forgatási transzformáció rotateright(float alfa); // forgatási transzformáció bool rotateup(float alfa); // forgatási transzformáció bool rotatedown(float alfa); // forgatási transzformáció


4 Nézőpont megváltoztatása + c c b a b b a a ϕ ϕ ϕ ϕ cos sin sin cos + α α α α α α sin cos sin cos sin cos r c c r c b b r c a a Balra Jobbra: ϕ ϕ Felfelé Lefelé: α α
 R M bx + ay u 2 2 a + b c v a 2 2 ( ax + by) + ( a + b ) 2 + b 2 képsíktól való távolság: m ax + by + cz z r")
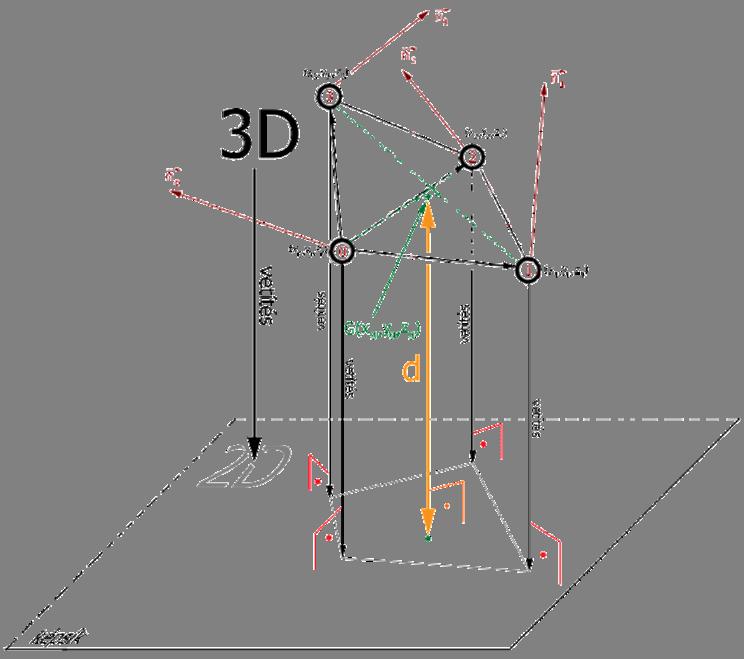
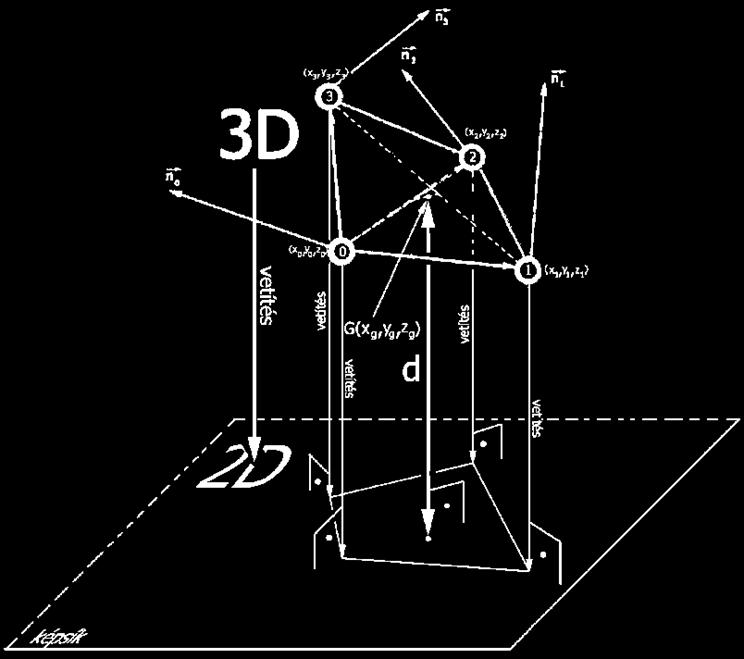
5 Merőleges vetítés Egységnyi vetítő vektor mely merőleges az Origón átmenő képsíkra r 3 p( a b c) R p r a + b + c 1 a 2 + b 2 0 az összes többi fénysugár párhuzamos p r -vel képsíkbeli koordináták: 3 ( x y z) R M bx + ay u 2 2 a + b c v a 2 2 ( ax + by) + ( a + b ) 2 + b 2 képsíktól való távolság: m ax + by + cz z r p OM


6 Perspektívikus vetítés képsík: xoy Oz megfigyelő: tengelyen szemtávolság: d képsíkbeli koordináták: 3 ( x y z) R M xz x d z yz y d z képsíktól való távolság: z
 ( ) ( ) ( ) ( ) ( ) [ ] [ ] d c b a uv v u fz v u fy v u fx v u F n c d dv m a b du")
![m k du k a u k... 01 + n l dv l c v l... 01 + ( ) ( ) ( ) ( ) [ ] 1 01.](/docs-images/103/158372083/images/7-1.jpg ".. 1 01.")
7 Parametrikus felületek. Négyszögű háló [ ] [ ] 3 : R d c b a F ( ) ( ) ( ) ( ) ( ) ( ) [ ] [ ] d c b a uv v u fz v u fy v u fx v u F n c d dv m a b du m k du k a u k n l dv l c v l ( ) ( ) ( ) ( ) [ ] n l m k v u v u v u v u l k l k l k l k ( ) ( ) ( ) ( ) [ ] n l m k v u F v u F v u F v u F l k l k l k l k felület paraméterezése: értelmezés tartomámybeli osztópontok: 2D-os rácshálót alkotó negyszögek: 3D-os rácshálót alkotó negyszögek:
8 2D/3D-os négyszögek
9 squares2d.h class CSquare3D; class CMesh2D; class CSquare2D friend CMesh2D; friend CSquare3D; private: CVector2D *corner; bool visible; bool transparent; TColor transparentcolor; public: // alapértelmezett konstruktor CSquare2D(); // másoló konstruktor CSquare2D(const CSquare2D &s); // hozzárendelő operátor CSquare2D& operator (const CSquare2D &s); //módosító metódusok updatecorner(int icorner float x float y); updatecorner(int icorner const CVector2D& v); ; //destruktor ~CSquare2D();
10 squares3d.h class CMesh3D; class CSquare3D friend CMesh3D; private: CVector3D *corner; CVector3D *normal; float d; bool transparent; TColor transparentcolor; public: CSquare3D(); CSquare3D(const CSquare3D &s); CSquare3D& operator (const CSquare3D &s); float CSquare2D getdistance() const; updatecorner(int icorner float x float y float z); updatecorner(int icorner const CVector3D& v); updatenormal(int icorner float x float y float z); updatenormal(int icorner const CVector3D& n); orthoprojection(const CVector3D &lightdir); ; ~CSquare3D(); //a qsort függvényhez szükséges egy összehasonlító függvény (a d alapján rendezzük a szemeket növekvő sorrendbe) int compare3dsquares(const * s1 const * s2);
11 mesh2d.h class CMesh3D; class CMesh2D friend CMesh3D; private: int nrmesh; CSquare2D *mesh; public: ; CMesh2D& virtual CMesh2D(int nrmesh0); CMesh2D(const CMesh2D &m2d); operator (const CMesh2D &m2d); updatecorner(int imesh int jcorner float x float y); updatecorner(int imesh int jcorner const CVector2D& v); setvisibility(int imesh bool visible); settransparency(int imesh bool transparent); Draw(TCanvas *canvas int x0 int y0 float zoom const TColor &backcolor1 const TColor &backcolor2 const TColor &frontcolor1 const TColor &frontcolor2); ~CMesh2D(); // fontos hogy virtuális legyen mert származtatni fogunk ebből az osztályból
12 mesh2d.cpp részlet CMesh2D::Draw(TCanvas *canvas int x0 int y0 float zoom const TColor &backcolor1 const TColor &backcolor2 const TColor &frontcolor1 const TColor &frontcolor2) int br1getrvalue(backcolor1)bg1getgvalue(backcolor1)bb1getbvalue(backcolor1) br2getrvalue(backcolor2)bg2getgvalue(backcolor2)bb2getbvalue(backcolor2) fr1getrvalue(frontcolor1)fg1getgvalue(frontcolor1)fb1getbvalue(frontcolor1) fr2getrvalue(frontcolor2)fg2getgvalue(frontcolor2)fb2getbvalue(frontcolor2); float dbr(float)(br2-br1)/(float)(nrmesh-1) dbg(float)(bg2-bg1)/(float)(nrmesh-1) dbb(float)(bb2-bb1)/(float)(nrmesh-1) dfr(float)(fr2-fr1)/(float)(nrmesh-1) dfg(float)(fg2-fg1)/(float)(nrmesh-1) dfb(float)(fb2-fb1)/(float)(nrmesh-1); TPoint *p; p new TPoint[4]; for (int i0;i<nrmesh;i++) for (int j0;j<4;j++) p[j].xfloor((float)x0+(float)zoom*mesh[i].corner[j].x); p[j].yfloor((float)y0-(float)zoom*mesh[i].corner[j].y); if (mesh[i].visible) if (mesh[i].transparent) canvas->pen->stylepsdashdot; canvas->pen->colormesh[i].transparentcolor; canvas->brush->stylebsclear; else canvas->pen->stylepssolid; canvas->pen->colorrgb(floor(fr1+i*dfr)-75floor(fg1+i*dfg)-75floor(fb1+i*dfb)-75); canvas->brush->colorrgb(floor(fr1+i*dfr)floor(fg1+i*dfg)floor(fb1+i*dfb)); canvas->polygon(p3);
13 mesh2d.cpp részlet (folytatás) //for else //if (!mesh[i].visible) if (mesh[i].transparent) canvas->pen->stylepsdashdot; canvas->pen->colormesh[i].transparentcolor; canvas->brush->stylebsclear; else canvas->pen->stylepssolid; canvas->pen->colorrgb(floor(i*100.0f/(nrmesh-1)) floor(i*100.0f/(nrmesh-1)) floor(i*100.0f/(nrmesh-1))); canvas->brush->colorrgb(floor(br1+i*dbr)floor(bg1+i*dbg)floor(bb1+i*dbb)); canvas->polygon(p3); delete[] p;
14 mesh3d.h class CMesh3D private: int nrmesh; CSquare3D *mesh; public: CMesh3D(int nrmesh0); CMesh3D(const CMesh3D &m3d); CMesh3D& operator (const CMesh3D &m3d); ; CMesh3D CMesh2D virtual operator + (const CMesh3D &m3d); updatecorner(int imesh int jcorner float x float y float z); updatecorner(int imesh int jcorner const CVector3D& v); updatenormal(int imesh int jcorner float x float y float z); updatenormal(int imesh int jcorner const CVector3D& n); maketransparent(tcolor transparentcolor); orthoprojection(const CVector3D &lightdir); ~CMesh3D(); // fontos hogy virtuális legyen mert származtatni fogunk ebből az osztályból
15 mesh3d.cpp részlet CMesh2D CMesh3D::orthoProjection(const CVector3D &lightdir) CMesh2D result(nrmesh); CVector3D GN; // súlypontok távolsága a képsíktól for(int i0;i<nrmesh;i++) G.updateAll(0.0f0.0f0.0f); for(int j0;j<4;j++) G+mesh[i].corner[j]; mesh[i].dg*lightdir; // szemek növekvő sorrendbe rendezése a kapott távolságértékek alapján qsort(meshnrmeshsizeof(csquare3d)compare3dsquares); // szemek vetítése for(int i0;i<nrmesh;i++) N.updateAll(0.0f0.0f0.0f); for(int j0;j<4;j++) N+mesh[i].normal[j]; result.mesh[i]mesh[i].orthoprojection(lightdir); // láthatóság eldöntése // a szemek rendezése nélkül a láthatóság eldöntése nem ad helyes eredményt if (N*lightDir>0.0f) result.setvisibility(itrue); else result.setvisibility(ifalse); // áttetszőség beállítása result.settransparency(imesh[i].transparent); return result;
16 parametricsurfaces.h typedef float (*fptr) (float float); class CParametricSurface3D: public CMesh3D private: float a b c d; // értelmezési tartomány fptr fx fy fz; // koordinátafüggvények int m n; // (m-1)x(n-1)-es racsháló public: ; CParametricSurface3D(float a float b float c float d fptr fx fptr fy fptr fz int m int n);
17 parametricsurfaces.cpp CVector3D diffu(fptr fxfptr fy fptr fz float u float v) float h1e-5; return CVector3D((fx(u+hv)-fx(uv))/h(fy(u+hv)-fy(uv))/h(fz(u+hv)-fz(uv))/h); CVector3D diffv(fptr fxfptr fy fptr fz float u float v) float h1e-5; return CVector3D((fx(uv+h)-fx(uv))/h(fy(uv+h)-fy(uv))/h(fz(uv+h)-fz(uv))/h); CParametricSurface3D::CParametricSurface3D(float a float b float c float d fptr fxfptr fyfptr fz int mint n): CMesh3D(m*n) a(a)b(b)c(c)d(d)fx(fx)fy(fy)fz(fz)m(m)n(n) float du(b-a)/m dv(d-c)/n; float u[4]v[4]; int act0; for(unsigned int i0;i<m;i++) u[0]u[3]a+i*du; u[1]u[2]u[0]+du; for(unsigned int j0;j<n;j++) v[0]v[1]c+j*dv; v[2]v[3]v[0]+dv; for(unsigned int k0;k<4;k++) updatecorner(actkfx(u[k]v[k])fy(u[k]v[k])fz(u[k]v[k])); updatenormal(actkdiffu(fxfyfzu[k]v[k])%diffv(fxfyfzu[k]v[k])); act++;
![Domborzatjellegű (Euler-Monge előállítású) felületek felület paraméterezése matematikailag: z : z [ a b] [ c d] z( u v) R exe programban: float EulerMongeX(float u float](/docs-images/103/158372083/images/18-0.jpg "v) return u; float EulerMongeY(float u float v) return v; float EulerMongeZ(float u float v) return z(uv); [-3.23.2] [- 2.42.4] ( u v) //... CVector3D lightdir(sqrt(1.0/3.")
); // egységnyi vetítősugár float abcd; // értelmezési tartomány unsigned int m30 n30; // osztópontok száma u- illetve v-irányban CParametricSurface3D EulerMonge(a b c")
18 Domborzatjellegű (Euler-Monge előállítású) felületek felület paraméterezése matematikailag: z : z [ a b] [ c d] z( u v) R exe programban: float EulerMongeX(float u float v) return u; float EulerMongeY(float u float v) return v; float EulerMongeZ(float u float v) return z(uv); [ ] [ ] ( u v) //... CVector3D lightdir(sqrt(1.0/3.0) sqrt(1.0/3.0) sqrt(1.03.0)); // egységnyi vetítősugár float abcd; // értelmezési tartomány unsigned int m30 n30; // osztópontok száma u- illetve v-irányban CParametricSurface3D EulerMonge(a b c d EulerMongeX EulerMongeY EulerMongeZ m n); CMesh2D m2deulermonge.orthoprojection(lightdir); //... m2d.draw(...); z : z u e u v + v R
![Forgásfelületek felület paraméterezése matematikailag: F F 3 :[ a b] [ 02π ] R ( u v) ( f ( u) cosv f ( u) sin v g( u) ) g : [ a b] R programban: float fx(float u float v) return f(u)*cos(v);](/docs-images/103/158372083/images/19-0.jpg "float fy(float u float v) return f(u)*sin(v); float fz(float u float v) ( f ( u fx fy rögzített ) cosv f ( urögzített ) sin v g( urögzített ) return g(u); fx u //... fy u CVector3D lightdir(sqrt(1.")
; CMesh2D m2dforgasfelulet.")
19 Forgásfelületek felület paraméterezése matematikailag: F F 3 :[ a b] [ 02π ] R ( u v) ( f ( u) cosv f ( u) sin v g( u) ) g : [ a b] R programban: float fx(float u float v) return f(u)*cos(v); float fy(float u float v) return f(u)*sin(v); float fz(float u float v) ( f ( u fx fy rögzített ) cosv f ( urögzített ) sin v g( urögzített ) return g(u); fx u //... fy u CVector3D lightdir(sqrt(1.0/3.0) sqrt(1.0/3.0) sqrt(1.0/3.0)); // egységnyi vetítősugár float abc0.0d2*pi; // értelmezési tartomány unsigned int m30 n30; // osztópontok száma u- illetve v-irányban CParametricSurface3D Forgasfelulet(a b c d fx fy fz m n); CMesh2D m2dforgasfelulet.orthoprojection(lightdir); //... m2d.draw(...); ( ): [ 02π ] R ( rögzített v) f ( urögzített ) ( v) f ( u ) rögzített 2 rögzített cosv sin v
![Sajátságos forgásfelületek Gömb F F f g 3 :[ 0 π ] [ 02π ] R ( u v)](/docs-images/103/158372083/images/20-0.jpg "( f ( u) cosv f ( u) sin v g( u) ) ( u) ( u) r sin u r cosu exe r 1")
20 Sajátságos forgásfelületek Gömb F F f g 3 :[ 0 π ] [ 02π ] R ( u v) ( f ( u) cosv f ( u) sin v g( u) ) ( u) ( u) r sin u r cosu exe r 1
")
 ( u) ( u) u λ R λ u * exe c 2 λ")
21 Sajátságos forgásfelületek Kúp F F f g 3 :[ c c] [ 02π ] R ( u v) ( f ( u) cosv f ( u) sin v g( u) ) ( u) ( u) u λ R λ u * exe c 2 λ 1
![Sajátságos forgásfelületek Tórusz F F f g 3 :[ 02π ] [ 02π ] R ( u v) (](/docs-images/103/158372083/images/22-0.jpg "f ( u) cosv f ( u) sin v g( u) ) ( u) ( u) R + r sin u r cosu exe R 2 r")
22 Sajátságos forgásfelületek Tórusz F F f g 3 :[ 02π ] [ 02π ] R ( u v) ( f ( u) cosv f ( u) sin v g( u) ) ( u) ( u) R + r sin u r cosu exe R 2 r 1
 [ 02π")
![] R ( u v) ( f ( u) cosv f ( u) sin v](/docs-images/103/158372083/images/23-1.jpg "g( u) ) ( u) r sin u ( u) u r ln tan +")
23 Sajátságos forgásfelületek Pszeudoszféra F F f g 3 : ( 0 π ) [ 02π ] R ( u v) ( f ( u) cosv f ( u) sin v g( u) ) ( u) r sin u ( u) u r ln tan + cosu 2 exe r 1


24 S hogy miért nem jó az egész elképzelés? Soha ne higyjetek egy hosszúhajú huligánnak! :)

![matematikailag: F F f g 3 :[ 01] [ 02π ] R ( u](/docs-images/103/158372083/images/25-1.jpg "v) ( f ( u) cosv f ( u) sin v g( u) ) ( u) R +")

25 Egyoldalú felületek Sajátságosan Moebius-féle szalagok felület paraméterezése matematikailag: F F f g 3 :[ 01] [ 02π ] R ( u v) ( f ( u) cosv f ( u) sin v g( u) ) ( u) R + r( 1 2u) ( u) r( 1 2u) 2k + 1 cos v 2 2k + 1 sin v 2 k - csavarások száma R 2 r 1 k 1 exe exe R 2 r 1 k 5

 R m n 10 m n 20 m n 40")
26 Nem mindig kapunk helyes takarási sorrendet próbáljuk meg ábrázolni a következő felületet különböző felbontású rácshálókat használva z : z [ 33] [ 33] sin( 10 u v) R m n 10 m n 20 m n 40 m n 200

27 Az előbbi felület OpenGL alatt
28 Mire jó az operator + a CMesh3D osztályban? float planexoyx(float u float v) return u; float Torus2x(float u float v) return 5.0f+(3.0f+1.0f*sin(u))*cos(v); float planexoyy(float u float v) return v; float planexoyz(float u float v) return 0.0f; float Torus2y(float u float v) return 1.0f*cos(u); float Torus2z(float u float v) return (3.0f+1.0f*sin(u))*sin(v); float Torus1x(float u float v) return (5+2*sin(u))*cos(v); float Torus1y(float u float v) return (5+2*sin(u))*sin(v); float Torus1z(float u float v) return -2*cos(u); float Torus3x(float u float v) return 1.0f*cos(u); float Torus3y(float u float v) return 5.0f+(3.0f+1.0f*sin(u))*cos(v); float Torus3z(float u float v) return (3.0f+1.0f*sin(u))*sin(v);
29 Mire jó az operator + a CMesh3D osztályban? (folytatás) CParametricSurface3D planexoy(-11.0f11.0f-11.0f11.0fplanexoyxplanexoyyplanexoyz1010); CParametricSurface3D Torus1(0.0f2.0f*pi0.0f2.0f*piTorus1xTorus1yTorus1z3030); CParametricSurface3D Torus2(0.0f2.0f*pi0.0f2.0f*piTorus2xTorus2yTorus2z2020); CParametricSurface3D Torus3(0.0f2.0f*pi0.0f2.0f*piTorus3xTorus3yTorus3z88); planexoy.maketransparent(clgray); //... CVector3D CMesh3D CMesh2D lightdir( sqrt(1.0/3.0) sqrt(1.0/3.0) sqrt(1.0/3.0)); m3dplanexoy+torus1+torus2+torus3; m2dm3d.orthoprojection(lightdir); //... m2d.draw(...);
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag. Mátrix rangja
 VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
9. Írjuk fel annak a síknak az egyenletét, amely átmegy az M 0(1, 2, 3) ponton és. egyenessel;
 ponton és. egyenessel;") Síkok és egyenesek FELADATLAP Írjuk fel annak az egyenesnek az egyenletét, amely átmegy az M 0(,, ) ponton és a) az M(,, 0) ponton; b) párhuzamos a d(,, 5) vektorral; c) merőleges a x y + z 0 = 0 síkra;
Síkok és egyenesek FELADATLAP Írjuk fel annak az egyenesnek az egyenletét, amely átmegy az M 0(,, ) ponton és a) az M(,, 0) ponton; b) párhuzamos a d(,, 5) vektorral; c) merőleges a x y + z 0 = 0 síkra;
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
BME MOGI Gépészeti informatika 18. Grafika, fájlkezelés gyakorló óra. 1. feladat Készítsen alkalmazást az = +
 BME MOGI Gépészeti informatika 18. Grafika, fájlkezelés gyakorló óra 1. feladat Készítsen alkalmazást az = + függvény ábrázolására! Az értelmezési tartomány a [-6;5] intervallum, a lépésköz 0,1 legyen!
BME MOGI Gépészeti informatika 18. Grafika, fájlkezelés gyakorló óra 1. feladat Készítsen alkalmazást az = + függvény ábrázolására! Az értelmezési tartomány a [-6;5] intervallum, a lépésköz 0,1 legyen!
Síkbeli egyenesek. 2. Egy egyenes az x = 1 4t, y = 2 + t parméteres egyenletekkel adott. Határozzuk meg
 Analitikus mértan 3. FELADATLAP Síkbeli egyenesek 1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az origón
Analitikus mértan 3. FELADATLAP Síkbeli egyenesek 1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az origón
Koordinátarendszerek
 Koordinátarendszerek KO 1 Koordinátarendszerek Ponthalmazok előállításai Koordinátarendszerek KO Két gyakran alkalmazott síkbeli koordinátarendszer Derékszögű (Descartes féle) koordinátarendszer Síkbeli
Koordinátarendszerek KO 1 Koordinátarendszerek Ponthalmazok előállításai Koordinátarendszerek KO Két gyakran alkalmazott síkbeli koordinátarendszer Derékszögű (Descartes féle) koordinátarendszer Síkbeli
Számítógépes geometria (mester kurzus) III
 III") 2010 sz, Debreceni Egyetem Felületek A felület megadása implicit: F : R 3 R, F (x, y, z) = 0 Euler-Monge: f : [a, b] [c, d] R, z = f (x, y) paraméteres: r : [a, b] [c, d] R 3 trianguláris háló direkt megadása
2010 sz, Debreceni Egyetem Felületek A felület megadása implicit: F : R 3 R, F (x, y, z) = 0 Euler-Monge: f : [a, b] [c, d] R, z = f (x, y) paraméteres: r : [a, b] [c, d] R 3 trianguláris háló direkt megadása
Feladatok a Gazdasági matematika II. tárgy gyakorlataihoz
 Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Koordináta-geometria II.
 Koordináta-geometria II. DEFINÍCIÓ: (Alakzat egyenlete) A síkon adott egy derékszögű koordináta rendszer. A síkban levő alakzat egyenlete olyan f (x, y) = 0 egyenlet, amelyet azoknak és csak azoknak a
Koordináta-geometria II. DEFINÍCIÓ: (Alakzat egyenlete) A síkon adott egy derékszögű koordináta rendszer. A síkban levő alakzat egyenlete olyan f (x, y) = 0 egyenlet, amelyet azoknak és csak azoknak a
Gyakorló feladatok I.
 Gyakorló feladatok I. a Matematika Aa Vektorüggvények tárgyhoz (D D5 kurzusok) Összeállította: Szili László Ajánlott irodalmak:. G.B. Thomas, M.D. Weir, J. Hass, F.R. Giordano: Thomas-féle KALKULUS I.,
Gyakorló feladatok I. a Matematika Aa Vektorüggvények tárgyhoz (D D5 kurzusok) Összeállította: Szili László Ajánlott irodalmak:. G.B. Thomas, M.D. Weir, J. Hass, F.R. Giordano: Thomas-féle KALKULUS I.,
BME MOGI Gépészeti informatika 15.
 BME MOGI Gépészeti informatika 15. 1. feladat Készítsen alkalmazást a y=2*sin(3*x-π/4)-1 függvény ábrázolására a [-2π; 2π] intervallumban 0,1-es lépésközzel! Ezen az intervallumon a függvény értékkészlete
BME MOGI Gépészeti informatika 15. 1. feladat Készítsen alkalmazást a y=2*sin(3*x-π/4)-1 függvény ábrázolására a [-2π; 2π] intervallumban 0,1-es lépésközzel! Ezen az intervallumon a függvény értékkészlete
Lin.Alg.Zh.1 feladatok
 LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
Programozás II gyakorlat. 8. Operátor túlterhelés
 Programozás II gyakorlat 8. Operátor túlterhelés Kezdő feladat Írjunk egy Vector osztályt, amely n db double értéket tárol. A konstruktor kapja meg az elemek számát. Írj egy set(int idx, double v) függvényt,
Programozás II gyakorlat 8. Operátor túlterhelés Kezdő feladat Írjunk egy Vector osztályt, amely n db double értéket tárol. A konstruktor kapja meg az elemek számát. Írj egy set(int idx, double v) függvényt,
9. előadás. Térbeli koordinátageometria
 9. előadás Térbeli koordinátageometria Koordinátageometria a térben Descartes-féle koordinátarendszerben dolgozunk. A legegyszerűbb alakzatokat fogjuk vizsgálni. Az ezeket leíró egyenletek első-, vagy
9. előadás Térbeli koordinátageometria Koordinátageometria a térben Descartes-féle koordinátarendszerben dolgozunk. A legegyszerűbb alakzatokat fogjuk vizsgálni. Az ezeket leíró egyenletek első-, vagy
VIK A3 Matematika, Gyakorlati anyag 2.
 VIK A3 Matematika, Gyakorlati anyag 2. 208. november Sorok. Konvergensek-e az alábbi sorok? Ha igen, adjuk meg a határértéküket! n(n+3) n(n+)(n+2) 9n 2 3n 2 ( n + 2 2 n + + n) 2n+ n 2 (n+) 2 (f) ( 3) k+2
VIK A3 Matematika, Gyakorlati anyag 2. 208. november Sorok. Konvergensek-e az alábbi sorok? Ha igen, adjuk meg a határértéküket! n(n+3) n(n+)(n+2) 9n 2 3n 2 ( n + 2 2 n + + n) 2n+ n 2 (n+) 2 (f) ( 3) k+2
= Y y 0. = Z z 0. u 1. = Z z 1 z 2 z 1. = Y y 1 y 2 y 1
 Egyenes és sík a térben Elméleti áttekintés Az egyenes paraméteres egyenlete: X = u 1 λ + x 0 Y = u λ + y 0, Z = u λ + z 0 ahol a λ egy valós paraméter Az u = (u 1, u, u ) az egyenes irányvektora és P
Egyenes és sík a térben Elméleti áttekintés Az egyenes paraméteres egyenlete: X = u 1 λ + x 0 Y = u λ + y 0, Z = u λ + z 0 ahol a λ egy valós paraméter Az u = (u 1, u, u ) az egyenes irányvektora és P
BME MOGI Gépészeti informatika 7.
 BME MOGI Gépészeti informatika 7. 1. feladat Írjon Windows Forms alkalmazást egy kör és egy pont kölcsönös helyzetének vizsgálatára! A feladat megoldásához hozza létre a következő osztályokat! Pont osztály:
BME MOGI Gépészeti informatika 7. 1. feladat Írjon Windows Forms alkalmazást egy kör és egy pont kölcsönös helyzetének vizsgálatára! A feladat megoldásához hozza létre a következő osztályokat! Pont osztály:
(a b)(c d)(e f) = (a b)[(c d) (e f)] = = (a b)[e(cdf) f(cde)] = (abe)(cdf) (abf)(cde)
![(a b)(c d)(e f) = (a b)[(c d) (e f)] = = (a b)[e(cdf) f(cde)] = (abe)(cdf) (abf)(cde)](/thumbs/101/150731482.jpg "(a b)(c d)(e f) = (a b)[(c d) (e f)] = = (a b)[e(cdf) f(cde)] = (abe)(cdf) (abf)(cde)") 2. házi feladat 1.feladat a b)c d)e f) = a b)[c d) e f)] = = a b)[ecdf) fcde)] = abe)cdf) abf)cde) 2.feladat a) Legyen a két adott pontunk helyzete A = 0, 0), B = 1, 0), továbbá legyen a távolságok aránya
2. házi feladat 1.feladat a b)c d)e f) = a b)[c d) e f)] = = a b)[ecdf) fcde)] = abe)cdf) abf)cde) 2.feladat a) Legyen a két adott pontunk helyzete A = 0, 0), B = 1, 0), továbbá legyen a távolságok aránya
Síkbeli egyenesek Egy egyenes az x = 1 4t, y = 2 + t parméteres egyenletekkel adott. Határozzuk meg
 Analitikus mértan 5. FELADATLAP Síkbeli egyenesek 5.1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az
Analitikus mértan 5. FELADATLAP Síkbeli egyenesek 5.1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az
Az egyenes és a sík analitikus geometriája
 Az egyenes és a sík analitikus geometriája Az egyenes a kétdimenziós koordinátarendszerben A kétdimenziós koordinátarendszerben az egyenest egy n(a, B) normálvektorával és egy r 0 helyvektorú P(x 0,y 0
Az egyenes és a sík analitikus geometriája Az egyenes a kétdimenziós koordinátarendszerben A kétdimenziós koordinátarendszerben az egyenest egy n(a, B) normálvektorával és egy r 0 helyvektorú P(x 0,y 0
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
8. előadás. Kúpszeletek
 8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
1. feladatsor: Vektorfüggvények deriválása (megoldás)
") Matematika A gyakorlat Energetika és Mechatronika BSc szakok 016/17 ősz 1. feladatsor: Vektorfüggvények deriválása megoldás) 1. Tekintsük azt az L : R R lineáris leképezést ami az 1 0) vektort az 1 0 )
Matematika A gyakorlat Energetika és Mechatronika BSc szakok 016/17 ősz 1. feladatsor: Vektorfüggvények deriválása megoldás) 1. Tekintsük azt az L : R R lineáris leképezést ami az 1 0) vektort az 1 0 )
Nagy András. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 2010.
 Nagy András Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 010. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 1) Döntsd el, hogy a P pont illeszkedik-e az e egyenesre
Nagy András Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 010. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 1) Döntsd el, hogy a P pont illeszkedik-e az e egyenesre
3D koordináta-rendszerek
 3D koordináta-rendszerek z z y x y x y balkezes bal-sodrású x jobbkezes jobb-sodrású z 3D transzformációk - homogén koordináták (x, y, z) megadása homogén koordinátákkal: (x, y, z, 1) (x, y, z, w) = (x,
3D koordináta-rendszerek z z y x y x y balkezes bal-sodrású x jobbkezes jobb-sodrású z 3D transzformációk - homogén koordináták (x, y, z) megadása homogén koordinátákkal: (x, y, z, 1) (x, y, z, w) = (x,
Számítógépes geometria
 2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Összeállította: dr. Leitold Adrien egyetemi docens
 Skaláris szorzat az R n vektortérben Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok skaláris szorzata Két R n -beli vektor skaláris szorzata: Legyen a = (a 1,a 2,,a n ) és b
Skaláris szorzat az R n vektortérben Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok skaláris szorzata Két R n -beli vektor skaláris szorzata: Legyen a = (a 1,a 2,,a n ) és b
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások
 Megoldások") Megoldások 1. Tekintsük az alábbi szabályos hatszögben a következő vektorokat: a = AB és b = AF. Add meg az FO, DC, AO, AC, BE, FB, CE, DF vektorok koordinátáit az (a ; b ) koordinátarendszerben! Alkalmazzuk
Megoldások 1. Tekintsük az alábbi szabályos hatszögben a következő vektorokat: a = AB és b = AF. Add meg az FO, DC, AO, AC, BE, FB, CE, DF vektorok koordinátáit az (a ; b ) koordinátarendszerben! Alkalmazzuk
ANALÍZIS II. Példatár
 ANALÍZIS II. Példatár Többszörös integrálok 3. április 8. . fejezet Feladatok 3 4.. Kett s integrálok Számítsa ki az alábbi integrálokat:...3. π 4 sinx.. (x + y) dx dy (x + y) dy dx.4. 5 3 y (5x y y 3
ANALÍZIS II. Példatár Többszörös integrálok 3. április 8. . fejezet Feladatok 3 4.. Kett s integrálok Számítsa ki az alábbi integrálokat:...3. π 4 sinx.. (x + y) dx dy (x + y) dy dx.4. 5 3 y (5x y y 3
SZE, Doktori Iskola. Számítógépes grafikai algoritmusok. Összeállította: Dr. Gáspár Csaba. Felületmegjelenítés
 Felületmegjelenítés Megjelenítés paramétervonalakkal Drótvázas megjelenítés Megjelenítés takarással Triviális hátsólap eldobás A z-puffer algoritmus Megvilágítás és árnyalás Megjelenítés paramétervonalakkal
Felületmegjelenítés Megjelenítés paramétervonalakkal Drótvázas megjelenítés Megjelenítés takarással Triviális hátsólap eldobás A z-puffer algoritmus Megvilágítás és árnyalás Megjelenítés paramétervonalakkal
Tartalom. Descartes-koordináták. Geometriai értelmezés. Pont. Egyenes. Klár Gergely tremere@elte.hu. 2010/2011. tavaszi félév
 Tartalom Pont Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar Egyenes Sík Háromszög Gömb 2010/2011. tavaszi félév Descartes-koordináták Geometriai értelmezés
Tartalom Pont Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar Egyenes Sík Háromszög Gömb 2010/2011. tavaszi félév Descartes-koordináták Geometriai értelmezés
Geometriai modellezés. Szécsi László
 Geometriai modellezés Szécsi László Adatáramlás vezérlés Animáció világleírás Modellezés kamera Virtuális világ kép Képszintézis A modellezés részfeladatai Geometria megadása [1. előadás] pont, görbe,
Geometriai modellezés Szécsi László Adatáramlás vezérlés Animáció világleírás Modellezés kamera Virtuális világ kép Képszintézis A modellezés részfeladatai Geometria megadása [1. előadás] pont, görbe,
I. feladatsor. 9x x x 2 6x x 9x. 12x 9x2 3. 9x 2 + x. x(x + 3) 50 (d) f(x) = 8x + 4 x(x 2 25)
 50 (d) f(x) = 8x + 4 x(x 2 25)") I. feladatsor () Határozza meg az alábbi függvények határozatlan integrálját: (a) f(x) = (b) f(x) = x + 4 9x + (c) f(x) = (d) f(x) = 6x + 5 5x + f(x) = (f) f(x) = x + x + 5 x 6x + (g) f(x) = (h) f(x) =
I. feladatsor () Határozza meg az alábbi függvények határozatlan integrálját: (a) f(x) = (b) f(x) = x + 4 9x + (c) f(x) = (d) f(x) = 6x + 5 5x + f(x) = (f) f(x) = x + x + 5 x 6x + (g) f(x) = (h) f(x) =
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Matematika II. 1 sin xdx =, 1 cos xdx =, 1 + x 2 dx =
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Az egyenlőtlenség mindkét oldalát szorozzuk meg 4 16-al:
 Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
Tehetetlenségi nyomatékok
 Tehetetlenségi nyomtékok 1 Htározzuk meg z m tömegű l hosszúságú homogén rúd tehetetlenségi nyomtékát rúd trtóegyenesét metsző tetszőleges egyenesre vontkozón, h rúd és z egyenes hjlásszöge α, rúd középpontjánk
Tehetetlenségi nyomtékok 1 Htározzuk meg z m tömegű l hosszúságú homogén rúd tehetetlenségi nyomtékát rúd trtóegyenesét metsző tetszőleges egyenesre vontkozón, h rúd és z egyenes hjlásszöge α, rúd középpontjánk
Integrálszámítás (Gyakorló feladatok)
") Integrálszámítás (Gyakorló feladatok). Határozatlan integrál. Alapintegrálok F. Számítsa ki az alábbi határozatlan integrálokat! a) (x x + ) b) (6x x + 5) c) (x + x + x ) d) ( x + x x e) ( ) + e x ) f)
Integrálszámítás (Gyakorló feladatok). Határozatlan integrál. Alapintegrálok F. Számítsa ki az alábbi határozatlan integrálokat! a) (x x + ) b) (6x x + 5) c) (x + x + x ) d) ( x + x x e) ( ) + e x ) f)
Bevezetés a programozásba II. 5. Előadás: Másoló konstruktor, túlterhelés, operátorok
 Bevezetés a programozásba II 5. Előadás: Másoló konstruktor, túlterhelés, operátorok Emlékeztető struct Vektor { int meret, *mut; Vektor(int meret); int szamlal(int mit); }; int Vektor::szamlal(int mit)
Bevezetés a programozásba II 5. Előadás: Másoló konstruktor, túlterhelés, operátorok Emlékeztető struct Vektor { int meret, *mut; Vektor(int meret); int szamlal(int mit); }; int Vektor::szamlal(int mit)
0, különben. 9. Függvények
 9. Függvények 9.. Ábrázolja a megadott függvényeket, és vizsgálja meg a függvények korlátosságát, monotonitását, konveitását, paritását, előjelét, zérushelyeit, periodicitását és határozza meg a valós
9. Függvények 9.. Ábrázolja a megadott függvényeket, és vizsgálja meg a függvények korlátosságát, monotonitását, konveitását, paritását, előjelét, zérushelyeit, periodicitását és határozza meg a valós
5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11
![5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11](/thumbs/93/113569557.jpg "5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11") Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
Írja át a következő komplex számokat trigonometrikus alakba: 1+i, 2i, -1-i, -2, 3 Végezze el a műveletet: = 2. gyakorlat Sajátérték - sajátvektor 13 6
 Építész Kar Gakorló feladatok gakorlat Számítsa ki az alábbi komple számok összegét, különbségét, szorzatát, hánadosát: a/ z = i z = i b/ z = i z = - 7i c/ z = i z = i d/ z = i z = i e/ z = i z = i Írja
Építész Kar Gakorló feladatok gakorlat Számítsa ki az alábbi komple számok összegét, különbségét, szorzatát, hánadosát: a/ z = i z = i b/ z = i z = - 7i c/ z = i z = i d/ z = i z = i e/ z = i z = i Írja
Analízis III. gyakorlat október
 Vektoranalízis Analízis III. gyakorlat 216. október Gyakorló feladatok és korábbi zh feladatok V1. Igazolja az alábbi "szorzat deriválási" szabályt: div(ff) = F, f + f div(f). V2. Legyen f : IR 3 IR kétszer
Vektoranalízis Analízis III. gyakorlat 216. október Gyakorló feladatok és korábbi zh feladatok V1. Igazolja az alábbi "szorzat deriválási" szabályt: div(ff) = F, f + f div(f). V2. Legyen f : IR 3 IR kétszer
Skaláris szorzat: a b cos, ahol α a két vektor által bezárt szög.
 1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
Koordináta-geometria feladatok (emelt szint)
") Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
sin x = cos x =? sin x = dx =? dx = cos x =? g) Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!
 Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!") Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Lin.Alg.Zh.1 feladatok
 Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
45 különbözô egyenest kapunk, ha q! R\{-35}. b) $ =- 1& = 0, nem felel meg a feladat feltételeinek.
 $ =- 1& = 0, nem felel meg a feladat feltételeinek.") Az egyenes egyenletei 8 67 a), n( -) x - y b) x - y c) n( ) x+ y- d) n( -), x- y 7 67 a) y x b) n(b a), nl(a - b) ax - by 0 c) n( -) nl( ) 7 x + y 7 d) x - y e) x - 9y f) x + y g) x - h) - O, 77 n( ) nl(
Az egyenes egyenletei 8 67 a), n( -) x - y b) x - y c) n( ) x+ y- d) n( -), x- y 7 67 a) y x b) n(b a), nl(a - b) ax - by 0 c) n( -) nl( ) 7 x + y 7 d) x - y e) x - 9y f) x + y g) x - h) - O, 77 n( ) nl(
Kiindulás 01. Ábrázoló geometria "testépítés" transzformáció segítségével. n 2 " x 1,2. n 1 '
 Kiindulás 01 A négyszög alapú szabályos hasáb x 1,2 AB szakas második képe 02 A négyszög alapú szabályos hasáb Transzformáció 1. 03 A négyszög alapú szabályos hasáb 2. Négyzet alaplap élbe transzformálása,
Kiindulás 01 A négyszög alapú szabályos hasáb x 1,2 AB szakas második képe 02 A négyszög alapú szabályos hasáb Transzformáció 1. 03 A négyszög alapú szabályos hasáb 2. Négyzet alaplap élbe transzformálása,
Virtuális függvények (late binding)
") Virtuális függvények (late binding) Miskolci Egyetem Általános Informatikai Tanszék Virtuális függvények CPP5 / 1 Azonos nevű függvények megkülönböztetése paraméterszignatúra (függvény overloading) - egy
Virtuális függvények (late binding) Miskolci Egyetem Általános Informatikai Tanszék Virtuális függvények CPP5 / 1 Azonos nevű függvények megkülönböztetése paraméterszignatúra (függvény overloading) - egy
Lengyelné Dr. Szilágyi Szilvia április 7.
 ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
HÁZI FELADATOK. 1. félév. 1. konferencia A lineáris algebra alapjai
 HÁZI FELADATOK. félév. konferencia A lineáris algebra alapjai Értékelés:. egység: önálló feladatmegoldás.8. Döntse el, párhuzamosak-e a következő vektorpárok: a) a( ; ; 7) b(; 5; ) b) c(; 9; 5) d(8; 6;
HÁZI FELADATOK. félév. konferencia A lineáris algebra alapjai Értékelés:. egység: önálló feladatmegoldás.8. Döntse el, párhuzamosak-e a következő vektorpárok: a) a( ; ; 7) b(; 5; ) b) c(; 9; 5) d(8; 6;
1. Oldja meg a z 3 (5 + 3j) (8 + 2j) 2. Adottak az A(1,4,3), B(3,1, 1), C( 5,2,4) pontok a térben.
 (8 + 2j) 2. Adottak az A(1,4,3), B(3,1, 1), C( 5,2,4) pontok a térben.") Szak: Műszaki menedzser I. Dátum: 006. június. MEGOLDÓKULCS Tárgy: Matematika szigorlat Idő: 0 perc Neptun kód: Előadó: Berta Gábor szig 06 06 0 Pontszám: /00p. Oldja meg a z (5 + j (8 + j + = (+5j (7
Szak: Műszaki menedzser I. Dátum: 006. június. MEGOLDÓKULCS Tárgy: Matematika szigorlat Idő: 0 perc Neptun kód: Előadó: Berta Gábor szig 06 06 0 Pontszám: /00p. Oldja meg a z (5 + j (8 + j + = (+5j (7
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások
 Megoldások") Megoldások 1. Határozd meg a szakasz hosszát, ha a végpontok koordinátái: A ( 1; ) és B (5; )! A szakasz hosszához számítsuk ki a két pont távolságát: d AB = AB = (5 ( 1)) + ( ) = 6 + 1 = 7 6,08.. Határozd
Megoldások 1. Határozd meg a szakasz hosszát, ha a végpontok koordinátái: A ( 1; ) és B (5; )! A szakasz hosszához számítsuk ki a két pont távolságát: d AB = AB = (5 ( 1)) + ( ) = 6 + 1 = 7 6,08.. Határozd
Matematika II képletek. 1 sin xdx =, cos 2 x dx = sh 2 x dx = 1 + x 2 dx = 1 x. cos xdx =,
 Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Vektorterek. =a gyakorlatokon megoldásra ajánlott
 Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Hajder Levente 2018/2019. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Egyenletek, egyenlőtlenségek V.
 Egyenletek, egyenlőtlenségek V. DEFINÍCIÓ: (Másodfokú egyenlet) Az ax + bx + c = 0 alakban felírható egyenletet (a, b, c R; a 0), ahol x a változó, másodfokú egyenletnek nevezzük. TÉTEL: Az ax + bx + c
Egyenletek, egyenlőtlenségek V. DEFINÍCIÓ: (Másodfokú egyenlet) Az ax + bx + c = 0 alakban felírható egyenletet (a, b, c R; a 0), ahol x a változó, másodfokú egyenletnek nevezzük. TÉTEL: Az ax + bx + c
Számítási feladatok a Számítógépi geometria órához
 Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
I. Vektorok. Adott A (2; 5) és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:
 és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:") I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
Hajder Levente 2014/2015. tavaszi félév
 Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
Az Országos Középiskolai Tanulmányi Verseny tanévi első fordulójának feladatmegoldásai
 Az Országos Középiskolai Tanulmányi Verseny 008-009. tanévi első fordulójának feladatmegoldásai matematikából, a II. kategória számára. Határozzuk meg az alábbi egyenletrendszer valós megoldásait. ( x
Az Országos Középiskolai Tanulmányi Verseny 008-009. tanévi első fordulójának feladatmegoldásai matematikából, a II. kategória számára. Határozzuk meg az alábbi egyenletrendszer valós megoldásait. ( x
Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály, középszint
 TÁMOP-.1.4-08/2-2009-0011 A kompetencia alapú oktatás feltételeinek megteremtése Vas megye közoktatási intézményeiben Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály, középszint Vasvár,
TÁMOP-.1.4-08/2-2009-0011 A kompetencia alapú oktatás feltételeinek megteremtése Vas megye közoktatási intézményeiben Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály, középszint Vasvár,
Megoldások. Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma)
") Megoldások 1. Határozd meg az a és b vektor skaláris szorzatát, ha a = 5, b = 4 és a közbezárt szög φ = 55! Alkalmazzuk a megfelelő képletet: a b = a b cos φ = 5 4 cos 55 11,47. 2. Határozd meg a következő
Megoldások 1. Határozd meg az a és b vektor skaláris szorzatát, ha a = 5, b = 4 és a közbezárt szög φ = 55! Alkalmazzuk a megfelelő képletet: a b = a b cos φ = 5 4 cos 55 11,47. 2. Határozd meg a következő
VIK A1 Matematika BOSCH, Hatvan, 5. Gyakorlati anyag
 VIK A1 Matematika BOSCH, Hatvan, 5. Gyakorlati anyag 2018/19 1. félév Függvények határértéke 1. Bizonyítsuk be definíció alapján a következőket! (a) lim x 2 3x+1 5x+4 = 1 2 (b) lim x 4 x 16 x 2 4x = 2
VIK A1 Matematika BOSCH, Hatvan, 5. Gyakorlati anyag 2018/19 1. félév Függvények határértéke 1. Bizonyítsuk be definíció alapján a következőket! (a) lim x 2 3x+1 5x+4 = 1 2 (b) lim x 4 x 16 x 2 4x = 2
117. AA Megoldó Alfréd AA 117.
 Programozás alapjai 2. (inf.) pót-pótzárthelyi 2011.05.26. gyak. hiányzás: kzhpont: MEG123 IB.028/117. NZH:0 PZH:n Minden beadandó megoldását a feladatlapra, a feladat után írja! A megoldások során feltételezheti,
Programozás alapjai 2. (inf.) pót-pótzárthelyi 2011.05.26. gyak. hiányzás: kzhpont: MEG123 IB.028/117. NZH:0 PZH:n Minden beadandó megoldását a feladatlapra, a feladat után írja! A megoldások során feltételezheti,
500. CC Megoldó Alfréd CC 500.
 Programozás alapjai 2. PótZH 2010.05.20. gyakorlat: G1/IB.146 Hiány:3 ZH:7,71 MEGOLD SCH/500. Hftest: 0 ZHp: Minden beadandó megoldását a feladatlapra, a feladat után írja! A megoldások során feltételezheti,
Programozás alapjai 2. PótZH 2010.05.20. gyakorlat: G1/IB.146 Hiány:3 ZH:7,71 MEGOLD SCH/500. Hftest: 0 ZHp: Minden beadandó megoldását a feladatlapra, a feladat után írja! A megoldások során feltételezheti,
C++ programozási nyelv Konstruktorok-destruktorok
 C++ programozási nyelv Konstruktorok-destruktorok Nyugat-Magyarországi Egyetem Faipari Mérnöki Kar Informatikai Intézet Soós Sándor 2004. szeptember A C++ programozási nyelv Soós Sándor 1/20 Tartalomjegyzék
C++ programozási nyelv Konstruktorok-destruktorok Nyugat-Magyarországi Egyetem Faipari Mérnöki Kar Informatikai Intézet Soós Sándor 2004. szeptember A C++ programozási nyelv Soós Sándor 1/20 Tartalomjegyzék
Vektorok és koordinátageometria
 Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások. alapfüggvény (ábrán: fekete)
 Megoldások. alapfüggvény (ábrán: fekete)") Megoldások 1. Ábrázold és jellemezd a következő függvényeket! a) f (x) = sin (x π ) + 1 b) f (x) = 3 cos (x) c) f (x) = ctg ( 1 x) 1 a) A kérdéses függvényhez a következő lépésekben juthatunk el: g (x)
Megoldások 1. Ábrázold és jellemezd a következő függvényeket! a) f (x) = sin (x π ) + 1 b) f (x) = 3 cos (x) c) f (x) = ctg ( 1 x) 1 a) A kérdéses függvényhez a következő lépésekben juthatunk el: g (x)
5. házi feladat. AB, CD kitér élpárra történ tükrözések: Az ered transzformáció: mivel az origó xpont, így nincs szükség homogénkoordinátás
 5. házi feladat 1.feladat A csúcsok: A = (0, 1, 1) T, B = (0, 1, 1) T, C = (1, 0, 0) T, D = ( 1, 0, 0) T AB, CD kitér élpárra történ tükrözések: 1 0 0 T AB = 0 1 0, elotlási rész:(i T AB )A = (0, 0, )
5. házi feladat 1.feladat A csúcsok: A = (0, 1, 1) T, B = (0, 1, 1) T, C = (1, 0, 0) T, D = ( 1, 0, 0) T AB, CD kitér élpárra történ tükrözések: 1 0 0 T AB = 0 1 0, elotlási rész:(i T AB )A = (0, 0, )
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások
 Megoldások") Megoldások 1. Írd fel a K (0; 2) középpontú 7 sugarú kör egyenletét! A keresett kör egyenletét felírhatjuk a képletbe való behelyettesítéssel: x 2 + (y + 2) 2 = 49. 2. Írd fel annak a körnek az egyenletét,
Megoldások 1. Írd fel a K (0; 2) középpontú 7 sugarú kör egyenletét! A keresett kör egyenletét felírhatjuk a képletbe való behelyettesítéssel: x 2 + (y + 2) 2 = 49. 2. Írd fel annak a körnek az egyenletét,
Elemi Alkalmazások Fejlesztése II.
 Elemi Alkalmazások Fejlesztése II. Osztályok közötti kapcsolatok öröklődés asszociáció aggregáció kompozíció 1. Feladat Készítsünk programot, amellyel testek térfogatát határozhatjuk meg, illetve megadhatjuk
Elemi Alkalmazások Fejlesztése II. Osztályok közötti kapcsolatok öröklődés asszociáció aggregáció kompozíció 1. Feladat Készítsünk programot, amellyel testek térfogatát határozhatjuk meg, illetve megadhatjuk
1. Transzformációk mátrixa
 1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
MINTAFELADATOK. 1. feladat: Két síkidom metszése I.33.,I.34.
 MINTAFELADATOK 1. feladat: Két síkidom metszése I.33.,I.34. 2. feladat: Testábrázolás képsíktranszformációval Gúla ábrázolása (a magasságvonalának transzformálásával) Adott az m egyenes, a ráilleszkedő
MINTAFELADATOK 1. feladat: Két síkidom metszése I.33.,I.34. 2. feladat: Testábrázolás képsíktranszformációval Gúla ábrázolása (a magasságvonalának transzformálásával) Adott az m egyenes, a ráilleszkedő
Az axonometrikus ábrázolás analitikus geometriai egyenleteinek másfajta levezetése. Bevezetés
 1 Az axonometrikus ábrázolás analitikus geometriai egyenleteinek másfajta levezetése Bevezetés Több korábbi dolgozatunkban is foglalkoztunk hasonló dolgokkal, vagyis az axonometri - kus ábrázolás alapfeladatának
1 Az axonometrikus ábrázolás analitikus geometriai egyenleteinek másfajta levezetése Bevezetés Több korábbi dolgozatunkban is foglalkoztunk hasonló dolgokkal, vagyis az axonometri - kus ábrázolás alapfeladatának
Fizika 1i, 2018 őszi félév, 1. gyakorlat
 Fizika i, 08 őszi félév,. gyakorlat Szükséges előismeretek: vektorok, műveletek vektorokkal (összeadás, kivonás, skalárral való szorzás, skaláris szorzat és vektoriális szorzat, abszolút érték), vektorok
Fizika i, 08 őszi félév,. gyakorlat Szükséges előismeretek: vektorok, műveletek vektorokkal (összeadás, kivonás, skalárral való szorzás, skaláris szorzat és vektoriális szorzat, abszolút érték), vektorok
NULLADIK MATEMATIKA ZÁRTHELYI
 A NULLADIK MATEMATIKA ZÁRTHELYI 20-09-2 Terem: Munkaidő: 0 perc. A dolgozat megírásához íróeszközön kívül semmilyen segédeszköz nem használható! Csak és kizárólag tollal tölthető ki a feladatlap, a ceruzával
A NULLADIK MATEMATIKA ZÁRTHELYI 20-09-2 Terem: Munkaidő: 0 perc. A dolgozat megírásához íróeszközön kívül semmilyen segédeszköz nem használható! Csak és kizárólag tollal tölthető ki a feladatlap, a ceruzával
Vektorok összeadása, kivonása, szorzás számmal, koordináták
 Vektorok összeadása, kivonása, szorzás számmal, koordináták 1. Mik lesznek a P (3, 4, 8) pont C (3, 7, 2) pontra vonatkozó tükörképének a koordinátái? 2. Egy szabályos hatszög középpontja K (4, 1, 4),
Vektorok összeadása, kivonása, szorzás számmal, koordináták 1. Mik lesznek a P (3, 4, 8) pont C (3, 7, 2) pontra vonatkozó tükörképének a koordinátái? 2. Egy szabályos hatszög középpontja K (4, 1, 4),
Dinamikus csatolású függvénykönyvtár készítése és használata Plugin-szerű betöltés Egyszeű C++ osztályok készítése
 FEJLETT PROGRAMOZÁSI NYELVEK, 2009 2. GYAKORLAT - Linux alatti C/C++ programozás Cél: Dinamikus csatolású függvénykönyvtár készítése és használata Plugin-szerű betöltés Egyszeű C++ osztályok készítése
FEJLETT PROGRAMOZÁSI NYELVEK, 2009 2. GYAKORLAT - Linux alatti C/C++ programozás Cél: Dinamikus csatolású függvénykönyvtár készítése és használata Plugin-szerű betöltés Egyszeű C++ osztályok készítése
5. gyakorlat. Lineáris leképezések. Tekintsük azt a valós függvényt, amely minden számhoz hozzárendeli az ötszörösét!
 5. gyakorlat Lineáris leképezések Tekintsük azt a valós függvényt, amely minden számhoz hozzárendeli az ötszörösét! f : IR IR, f(x) 5x Mit rendel hozzá ez a függvény két szám összegéhez? x, x IR, f(x +
5. gyakorlat Lineáris leképezések Tekintsük azt a valós függvényt, amely minden számhoz hozzárendeli az ötszörösét! f : IR IR, f(x) 5x Mit rendel hozzá ez a függvény két szám összegéhez? x, x IR, f(x +
Klár Gergely 2010/2011. tavaszi félév
 Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Pont 1 Pont 2 3 4 5 Tartalom Pont Descartes-koordináták Homogén koordináták
Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Pont 1 Pont 2 3 4 5 Tartalom Pont Descartes-koordináták Homogén koordináták
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Számítástechnika II. BMEKOKAA Előadás. Dr. Bécsi Tamás
 Számítástechnika II. BMEKOKAA153 2. Előadás Dr. Bécsi Tamás Tömbök (Arrays) Definíció: típus[] név; (pld. int[] szamok; ) Inicializálás: int[] szamok = new int[4]; int[] szamok = 1,2,4,3,5}; int[] szamok
Számítástechnika II. BMEKOKAA153 2. Előadás Dr. Bécsi Tamás Tömbök (Arrays) Definíció: típus[] név; (pld. int[] szamok; ) Inicializálás: int[] szamok = new int[4]; int[] szamok = 1,2,4,3,5}; int[] szamok
Matematika szigorlat, Mérnök informatikus szak I máj. 29.
 Matematika szigorlat, Mérnök informatikus szak I. 2007. máj. 29. Megoldókulcs 1. Adott az S : 3x 6y + 2z = 6 sík a három dimenziós térben. (a) Írja fel egy tetszőleges, az S-re merőleges S síknak az egyenletét!
Matematika szigorlat, Mérnök informatikus szak I. 2007. máj. 29. Megoldókulcs 1. Adott az S : 3x 6y + 2z = 6 sík a három dimenziós térben. (a) Írja fel egy tetszőleges, az S-re merőleges S síknak az egyenletét!
A kör. A kör egyenlete
 A kör egyenlete A kör A kör egyenlete 8 a) x + y 6 b) x + y c) 6x + 6y d) x + y 9 8 a) x + y 6 + 9 b) x + y c) x + y a + b 8 a) (x - ) + (y - ) 9, rendezve x + y - 8x - y + b) x + y - 6x - 6y + c) x +
A kör egyenlete A kör A kör egyenlete 8 a) x + y 6 b) x + y c) 6x + 6y d) x + y 9 8 a) x + y 6 + 9 b) x + y c) x + y a + b 8 a) (x - ) + (y - ) 9, rendezve x + y - 8x - y + b) x + y - 6x - 6y + c) x +
Descartes-féle, derékszögű koordináta-rendszer
 Descartes-féle, derékszögű koordináta-rendszer A derékszögű koordináta-rendszerben a sík minden pontjához egy rendezett valós számpár rendelhető. A számpár első tagja (abszcissza) a pont y tengelytől mért
Descartes-féle, derékszögű koordináta-rendszer A derékszögű koordináta-rendszerben a sík minden pontjához egy rendezett valós számpár rendelhető. A számpár első tagja (abszcissza) a pont y tengelytől mért
1.1. Gyökök és hatványozás... 1 1.1.1. Hatványozás... 1 1.1.2. Gyökök... 1 1.2. Azonosságok... 2 1.3. Egyenlőtlenségek... 3
 Tartalomjegyzék 1. Műveletek valós számokkal... 1 1.1. Gyökök és hatványozás... 1 1.1.1. Hatványozás... 1 1.1.2. Gyökök... 1 1.2. Azonosságok... 2 1.3. Egyenlőtlenségek... 3 2. Függvények... 4 2.1. A függvény
Tartalomjegyzék 1. Műveletek valós számokkal... 1 1.1. Gyökök és hatványozás... 1 1.1.1. Hatványozás... 1 1.1.2. Gyökök... 1 1.2. Azonosságok... 2 1.3. Egyenlőtlenségek... 3 2. Függvények... 4 2.1. A függvény
Megjegyzés: jelenti. akkor létezik az. ekkor
 . Hármas Integrál. Bevezetés és definíciók A bevezetés első részében egy feladaton keresztül jutunk el a hármasintegrál definíciójához. Feladat: Legyen R korlátos test, és a testnek legyen az f(x, y, z
. Hármas Integrál. Bevezetés és definíciók A bevezetés első részében egy feladaton keresztül jutunk el a hármasintegrál definíciójához. Feladat: Legyen R korlátos test, és a testnek legyen az f(x, y, z
LINEÁRIS ALGEBRA. matematika alapszak. Euklideszi terek. SZTE Bolyai Intézet, őszi félév. Euklideszi terek LINEÁRIS ALGEBRA 1 / 40
 LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
Budapesti Műszaki és Gazdaságtudományi Egyetem Matematika Intézet. A Bevezető matematika tárgy gyakorlati anyaga
 Budapesti Műszaki és Gazdaságtudományi Egyetem Matematika Intézet A Bevezető matematika tárgy gyakorlati anyaga Összeállította: Kádasné Dr. V. Nagy Éva egyetemi docens Szerkesztette: Nagy Ilona BME Budapest
Budapesti Műszaki és Gazdaságtudományi Egyetem Matematika Intézet A Bevezető matematika tárgy gyakorlati anyaga Összeállította: Kádasné Dr. V. Nagy Éva egyetemi docens Szerkesztette: Nagy Ilona BME Budapest
Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához
 Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához Dr. Nagy Gábor, Geometria Tanszék 2010. szeptember 16. Görbék paraméterezése 1. feladat. (A) Bizonyítsuk be a vektoriális szorzatra vonatkozó
Feladatsor A differenciálgeometria alapja c. kurzus gyakorlatához Dr. Nagy Gábor, Geometria Tanszék 2010. szeptember 16. Görbék paraméterezése 1. feladat. (A) Bizonyítsuk be a vektoriális szorzatra vonatkozó
Feladat. Ternáris fa. Típusspecikáció. Reprezentáció. Absztrakt implementáció. Érdi Gerg EAF II. 4/3.
 Feladat djuk meg, hogy egy ternáris fa INORDER bejárás szerint sorozatba f zött értékei között mekkora a leghosszabb csupa pozitív számot tartalmazó részsorozat. Ternáris fa Típusspecikáció z alaphalmaz
Feladat djuk meg, hogy egy ternáris fa INORDER bejárás szerint sorozatba f zött értékei között mekkora a leghosszabb csupa pozitív számot tartalmazó részsorozat. Ternáris fa Típusspecikáció z alaphalmaz
Transzformáció a főtengelyekre és a nem főtengelyekre vonatkoztatott. Az ellipszis a sík azon pontjainak mértani helye, amelyeknek két adott pontól
 Ellipsis.tex, February 9, 01 Az ellipszis Az ellipszis leírása Az ellipszis szerkesztése és tulajdonságai Az ellipszis kanonikus egyenlete A kör vetülete ellipszis Az ellipszis polárkoordinátás egyenlete
Ellipsis.tex, February 9, 01 Az ellipszis Az ellipszis leírása Az ellipszis szerkesztése és tulajdonságai Az ellipszis kanonikus egyenlete A kör vetülete ellipszis Az ellipszis polárkoordinátás egyenlete
Koordinátageometriai gyakorló feladatok I ( vektorok )
") Koordinátageometriai gyakorló feladatok I ( vektorok./ Határozd meg az AB szakasznak azt a pontját, amely a szakaszt : ha A ( ; és a B ( ; 8!./ Adott az A ( 3 ; 5 és a ( ; 6 B pont. Számítsd ki az AB vektor
Koordinátageometriai gyakorló feladatok I ( vektorok./ Határozd meg az AB szakasznak azt a pontját, amely a szakaszt : ha A ( ; és a B ( ; 8!./ Adott az A ( 3 ; 5 és a ( ; 6 B pont. Számítsd ki az AB vektor