Szimulációs technológiák NGB_IN040_1
|
|
|
- Emil Hegedüs
- 6 évvel ezelőtt
- Látták:
Átírás
1 Szimulációs technológiák NGB_IN040_1
2 Alapfogalmak Példák:» Példa1 Szoba hűlése, Euler módszerrel» Példa2 Egytömegű lengőrendszer» Példa3 RC kör Átviteli függvény Frekvenciatartomány Állapotgép


3 Elérhetőségek Dr. ing. Claudiu Pozna Horváth Ernő Tanszéki honlap
4 Arbejdsglæde Danish for "work happiness, the feeling of happiness provoked by a satisfying job"
5 A feladat Input Math Output T ሶ = α T k T C T 0 = 32 C o α = 0,07 Runge-Kutta void numintegralnelap(double *x, double *y, int asize, int *laps){ int i, j, maxlap = 0; double *results; // az tolsó kör számának megállapítása for(i = 0; i < asize - 1; i++) if(maxlap <= laps[i]) maxlap = laps[i]; // memória allokálása a körönként eredményeknek results = (double*)malloc(maxlap * sizeof(double)); // az eredmények tömb nullázása for(j = 0; j < maxlap; j++) results[j] = 0; for(i = 0; i < asize - 1; i++){ for(j = 0; j <= maxlap; j++) if(laps[i] == j){ results[j] += ((y[i+1] - y[i]) * (x[i] + x[i+1]) / 2.0); } } for(j = 1; j <= maxlap; j++) printf("%3d. kor: %7.1f meter hosszu\n", j, results[j]); } f f

6 Mi is az a szimuláció? Source: Glennz

7 Szimuláció Legegyszerűbb megfogalmazás: modellen végzett kísérlet. A modell esetünkben a valóság valamilyen szempontból absztrakt leképezése, leegyszerűsítése» számítási feladatok elvégzésének ideje
8 Modellezés 1. Problémafelvetés (megfogalmazás) 2. A probléma absztrakciója 3. A modell matematikai megfogalmazása 4. A modell matematikai alkalmazása 5. Kapott eredmények és a valóság összevetése
9 Matematikai alapok A differenciálegyenletek olyan egyenletek, melyekben az ismeretlen kifejezés egy differenciálható függvény. Az egyenletben az ismeretlen függvény különböző rendű deriváltjai szerepelnek, illetve egy- és többváltozós, de ismert függvények. Az ismeretlen függvény legmagasabb rendű deriváltjának a rendje» a differenciálegyenlet rendje. A problémák differenciálegyenletben való megfogalmazása a fizikában, mérnöki tudományokban, a közgazdaságtanban és még számos tudományban alapvető szerepet tölt be. [*wikipedia]
10 Matematikai alapok A differenciálegyenletek fajtái: Közönséges differenciálegyenlet (ODE) a tárgyban főleg ezekkel foglakozunk, itt az egyenlet egy egyváltozós differenciálható függvényre van felírva» n-edrendű differenciálegyenlet - a legmagasabb rendű derivált n-edrendű» lineáris vagy nemlineáris Parciális differenciálegyenlet Algebro-differenciálegyenlet Integro-differenciálegyenletek dy(t) dt = f(t, y t ) y t 0 = y 0
11 Matematikai alapok F (a, b) R 2 R f (a, b) R R Implicit alak: F x, y, y = 0 vagy F x, y, Dy = 0 Explicit alak: y(x) = f(x, y(x)) vagy dy(x) dx = f x, y x Lagrange jelölése y, Leibniz jelölése: dy dx, Newton: y ሶ (idő szerint)
12 Matematikai alapok Adott: dy(t) dt = f(t, y t ) y t 0 = y 0 (kezdeti érték) Itt f adott függvény, amely kielégíti a Lipschitz-feltételt Az differenciál egyenlet megoldása az y(t), amely kielégíti a kezdeti feltételt is.
13 Differenciálegyenletek numerikus megoldása 2010, Pécsi Tudományegyetem Kollár Bálint Eluler módszer - bevezetés dy(t) dt = f(t, y t ) y t 0 = y 0 (kezdeti érték) T dy(t) න 0 dt y(t) = y t0 + T = න f(t, y t ) 0 T y T y t0 = න f(t, y t ) 0 T f(t, y t ) t Integráljunk 0-tól T-ig Bontsuk véges t összegekre a t 0 -tól T-ig terjedő intervallumot. t=t 0

14 Alapok Mi a MATLAB? Mi a Simulink? Hogyan és miért alakultak ki és mire használhatók? Alapvető szintaktika, példák, alkalmazás stb.
15 MATLAB A MATLAB egy speciális programrendszer, amely numerikus számítások elvégzésére lett kifejlesztve és emellett egy programozási nyelv. A The MathWorks által kifejlesztett programrendszer képes mátrix számítások elvégzésére, függvények és adatok ábrázolására, algoritmusok implementációjára és felhasználói interfészek kialakítására. Habár a szoftver kizárólag numerikus, a MuPAD csomag hozzáadásával képes matematikai kifejezéseket grafikusan is megjeleníteni ben, több, mint 1 millió MATLAB felhasználó [* wikipedia]




16 1. MATrix LABoratory 2. Miért a mátrixok és a lineáris algebra? 1970-es évek, University of New Mexico Interpreteres interfész a LINPACK-hoz Lineáris egyenletrendszer, közös HPC gyökerek merevségi mátrix ritka mátrix hatékony megoldáshoz sokféle lineáris algebrai eszköz kell: alapműveletek egyes elemek, sorok, oszlopok manipulációja, stb. invertálás transzponálás determináns dekompozíciók sajátérték-számítás stb
17 Alapvető szintaktika (G)UI alapműveletek adattípusok változók, workspace műveletek vektorokkal és mátrixokkal indexek 1-től! referencia sorok, oszlopok, stb. elemenkénti műveletvégzés megjelenítés függvények meghívása a szintaktika robusztussága helyi dereferencia, óriásképletek többféle megoldás ugyanarra a problémára (pl. size(a,1)) IDE, m-fájlok programnyelvi elemek if for függvények stb. hibák értelmezése, debuging
18 Kitekintés Csak a felszínt kapargattuk, mivel a MATLAB moduláris (ld. később) Java alapú, de tartalmaz(hat) natív rendszerspecifikus komponenseket is (ezeket jellemzően C-ben írták) Ma már nem igaz, hogy a MATLAB csak interpreteres programnyelvként értelmezhető (ha programnyelvként akarjuk értelmezni), lefordítható Annak ellenére, hogy a gyökerek közösek (LINPACK), a közelmúltig nem bizonyult hatékonynak HPC feladatokra. Ez az utóbbi időben változott: a lineáris algebrai motort optimalizálták, ill. részben visszatértek a teljesítményorientált natív implementációkhoz (LINPACK, és egyéb leszármazottai: LAPACK, stb.) megjelentek a párhuzamosítást szolgáló megoldások ezekkel együtt sem lett kimondottan HPC platform, de egyre nagyobb méretű problémákat lehet hatékonyan megoldani vele
 grafikus programozási nyelv (leginkább) fizikai rendszerek tranziens")
: differenciálegyenlet, pl.: megoldás: integrálással (numerikusan!), pl.")
19 Mi a Simulink? a Simulink a MATLAB egyik toolbox-a a (sok közül) grafikus programozási nyelv (leginkább) fizikai rendszerek tranziens szimulációjához mi az, hogy tranziens fizikai rendszer állandósult állapot: algebrai egyenlet, pl.: időben változó állapot (tranziens): differenciálegyenlet, pl.: megoldás: integrálással (numerikusan!), pl.: Euler-módszer: T 0, T 1 = T 0 + α T k T 0 C miért így néz ki? (analóg számítógép) 0= α T k T C Δt, T 2 = T 1 + α T k T 1 C Δt, stb. T ሶ = α T k T C
20 Példa 1: Szoba hűlése T ሶ = α T k T C T k - a környezet hőmérséklete C - hőkapacitás [J/C o ] α - hőátadás Euler módszer, numerikus integrálás: T 0, T 1 = T 0 + α T k T 0 C Δt, T 2 = T 1 + α T k T 1 C Δt, stb.



21 ሶ T = α T k T C Példa 1: Szoba hűlése MATLAB implementáció LabVIEW implementáció
22 Közönséges differenciálegyenlet Angolul: ordinary differential equation, ODE Ebben az esetben az egyenlet egy egyváltozós differenciálható függvényre van felírva. Az n-ed rendű közönséges differenciálegyenlet általános megoldása az a függvény, mely pontosan n számú egymástól független állandót (paramétert) tartalmaz, és azonosan kielégíti az adott differenciálegyenletet. A numerikus integrálás közelítő eljárás az integrál kiszámítására.
23 Runge-Kutta Egy függvény integráljának a közelítése a kvadratúra, a kvadratúra szabályok többsége az interpolált függvényből származtatható. A legegyszerűbb módszer a téglalap-szabály. A téglalap-szabály alkalmazásakor az integrálandó függvényt téglalapokkal közelítjük. Az interpolációs függvény konstans, és keresztül megy a keresett függvény egy-egy pontjain ((a + b)/2, f((a + b)/2)). A Runge-Kutta módszerek numerikus megoldást adnak az közönséges differenciálegyenletekre. Legegyszerűbb válfaja az elsőrendű Euler módszer.
24 Euler módszer Az Euler-módszer a legegyszerűbb módszer differenciálegyenletrendszerek numerikus megoldására. Adott a következő: dy(t) dt = f(t, y t ) y t 0 = y 0 Bontsuk véges t összegekre a t 0 -tól T-ig terjedő intervallumot. T y(t) = y 0 + f(t, y t ) t t=t 0
25 Euler módszer Az Euler-módszer a legegyszerűbb módszer differenciálegyenletrendszerek numerikus megoldására. Adott a következő: dy(t) dt = f(t, y t ) y t 0 = y 0 Átalakítások után a képlet: y(t + t) = y(t) + f(t, y(t)) t T 0, T 1 = T 0 k T 0 T k Δt, T 2 = T 1 k T 1 T k Δt, stb.
26 Euler módszer pszeudo kódja T 0, T 1 = T 0 k T 0 T k Δt, T 2 = T 1 k T 1 T k Δt, stb. Ismert paraméterek: t: egy időlépés hossza f(t,y): y(t) ismeretlen függvény deriváltja t időpillanatban t 0 : kezdeti időpillanat (gyakorlatban célszerű 0-át választani) y 0 : kezdeti érték a kezdeti időpillanatban T: végső időpillanat Inicializálás: y := y 0 t := t 0 Eljárás: Ciklus amíg t < T y := y + f(t,y) * t t := t + t Ciklus vége Forrás: Differenciálegyenletek numerikus megoldása 2010, Pécsi Tudományegyetem Kollár Bálint
27 Szoba hűlése példa dt(t) dt dt(t) dt = α T k T(t) C k = α C = k T(t) T k T 0 =100 C o kiindulási hőmérséklet T K =20 C o környezeti hőmérséklet k=0,07 hűlési konstans (hőkapacitás/hőátadás) A szimuláció 0s és 60s időköz alatt zajlik A referencia számítása: T(t) = T k + T 0 T k e kt
28 Szoba hűlése példa T 0, T 1 = T 0 k T 0 T k Δt, T 2 = T 1 k T 1 T k Δt, stb. #define IDOKEZD 0 // idő kezdete #define IDOVEG 60 // idő vége #define KIINDHOM 100 // T 0 =100 C o kiindulási hőmérséklet #define KORNYHOM 20 // T 0 =20 C o környzeti hőmérséklet #define K // k=0,07 hűlési konstans void ivp_euler(deriv_fd f, double k, int lepes, int idokezd, int idoveg){ int t = idokezd; printf("lepes %2d: ", (int)lepes); do { if (t % 10 == 0) printf(fmt, k); k += lepes * f(t, k); } while ((t += lepes) <= idoveg); printf("\n"); }
29 Szoba hűlése példa Minél nagyobb a lépésköz annál pontatlanabb az eredmény. Persze a futási idő nő Szoba 100 C o 40 dt(t) 30 dt = k T(t) T k Lépés: 2 Lépés: 5 Lépés: 10 Analitikus



30 ሶ T = α T k T C Példa 1: Szoba hűlése MATLAB implementáció LabVIEW implementáció



 Valóság")

31 Példa 2: egytömegű lengőrendszer A modellezés 4 lépése: 1. absztrakció 2. matematikai megfogalmazás 3. Simulink-implementáció 4. ellenőrizzük, hogy nem számoltunk-e hülyeséget (validáció) Valóság Absztrakt fizikai modell Matematikai megfogalmazás? Simulink implementáció



32 Példa 3: RC-kör A modellezés 4 lépése: 1. absztrakció 2. matematikai megfogalmazás 3. Simulink-implementáció 4. ellenőrizzük, hogy nem számoltunk-e hülyeséget (validáció) Valóság Absztrakt fizikai modell Matematikai megfogalmazás? Simulink implementáció

 a Simulink önmagában is moduláris tematikus, magas(abb absztrakciós)")
33 Kitekintés nemlineáris modellek is készíthetők figyelembe vehetők a különböző adattípusok megvalósíthatók a hagyományos programszerkezetek (vö.: programozási nyelv!) kapcsolat... sokmindennel (ld. következő órák) a Simulink önmagában is moduláris tematikus, magas(abb absztrakciós) szintű toolboxok, modellek: SimElectronics, SimDriveline, stb.







34 Alkalmazás - Mire használják a többiek a MATLABot? orvosi képalkotás képfeldolgozás, alakfelismerés mesterséges intelligencia rádiófrekvenciás jelfeldolgozás GIS csillagászat szoftverfejlesztés adatbányászat stb. és a felsorolt módszerek fejlesztésére! (ld. még: balansz! )

 (prototípus) irányítórendszerek és szoftverek tervezése és megvalósítása Mindennapi, tevékenységfüggetlen mérnöki feladatok: mérési adatok")
35 Mire használjuk mi? Tetszőleges (jellemzően inkább koncentrált paraméterű) fizikai rendszer modellezése a mérnöki gyakorlatban. A járműiparban jellemzően: járműdinamikai modellezés járműalrendszerek, járműmechatronikai rendszerek modellezése Irányítástechnika (!!!) irányításelméleti kutatások szabályzók, irányítási algoritmusok fejlesztése és együttes szimulációja a fizikai modellel (modellalapú fejlesztési folyamat) (prototípus) irányítórendszerek és szoftverek tervezése és megvalósítása Mindennapi, tevékenységfüggetlen mérnöki feladatok: mérési adatok feldolgozása statisztikai vizsgálatok rutinfeladatok automatizálása stb.
36 Irányítástechnikai alkalmazások teljes irányítástechnikai eszköztár átviteli függvények state-space diszkrét rendszerek szabályozótervezési algoritmusok irányítási rendszerek vizsgálata (stabilitás, frekvenciaátvitel, stb.) kapcsolódó vizualizációs módszerek stb. gyakorlatilag a teljes irányításelméleti vertikum megvalósítása rendelkezésre áll de facto szabvány (lehet, hogy van olyan probléma, amit nem ezzel oldanak meg, de biztos, hogy nincs olyan probléma, amit ezzel nem oldanak meg)
37 Dokumentáció és ökoszisztéma nagyon jó help monográfia szintű elvi leírások irodalmi hivatkozásokkal példák, tutorialok teljes referencia-kézikönyv több millió felhasználó (nagyon valószínű, hogy nem leszel egyedül a problémáiddal) a katedrális és a bazár, MathWorks File Exchange: fórumok kész megoldások, scriptek, modellek, gyakran publikációk mellékleteként nagyon jó interoperabilitás
38 Az átviteli függvény (transfer function) Jelölése H(s), ritkábban W(s) A rendszerek bemenete és kimenete közötti kapcsolat. H s = Y(s) X(s) = L{y t } L{x t } X(s) H(s) Y(s)
39 Az átviteli függvény (transfer function) Az általános képlet: H s = Y(s) X(s) = a 0+a 1 s+a 2 s 2 +a n s n b 0 +b 1 s+b 2 s 2 +b m s m m n Példák: H 1 s = s + 1 2s 2 s + s 3 H 2 s = 1 C α s + 1
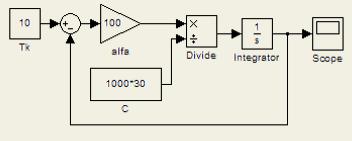
40 Az átviteli függvény (transfer function) Vegyük a jól ismert szoba hűlése példát, de most szabályozzuk a hőmérsékletet is! P teljesítmény 1 α T be 1 C α s + 1 T 1 α α C න
41 Az átviteli függvény (transfer function) Vegyük a jól ismert szoba hűlése példát, de most szabályozzuk a hőmérsékletet is! 1 α α C න T k α 1 C න
42 Az átviteli függvény (transfer function) Vegyük a jól ismert szoba hűlése példát, de most szabályozzuk a hőmérsékletet is! 1 α 1 C α s Cs + α
43 Az átviteli függvény (transfer function) Vegyük a jól ismert szoba hűlése példát, de most szabályozzuk a hőmérsékletet is! Szabályzó Beavatkozó 1 Cs + α
44 Simplifying block diagrams Hatásvázlat egyszerűsítés H 1 H 2 H = H 1 H 2 H 1 H 2 + H = H 1 + H 2 H 1 H 2 H = H H 1 H 2
45 Diszkrét / Folytonos idő H s = Y(s) X(s) = L{y t } L{x t } = a 0+a 1 s+a 2 s 2 +a n s n b 0 +b 1 s+b 2 s 2 +b m s m m n H z = Y(z) X(z) = z{y[k]} z{x[k]} = a 0+a 1 z 1 +a 2 z 2 +a n z n b 0 +b 1 z 1 +b 2 z 2 +b m z m m n H 1 z = 20z 1 30z ,2z 3 (1 0,3z 1 0,58z 2 + 0,24z 3 ) = 20(z 0,8)(z 0,7) (z 0,6)(z 0,8)(z 0,5)
46 Diszkrét / Folytonos idő Mintavételezés» Nyquist kritérium» f ½ f s 1,5 Folytonos 1,5 Diszkrét 1 1 0,5 0, ,5-0, ,5-1,5
47 Diszkrét idejű jelek megadása 1,2 1 x 1 k x ,8 0,6 0,4 0,2 1,ha k=0 x 1 k = δ k = { 0,ha k x 2 k x 2 k = δ 0 + 1,2δ 1 +6δ 2 x 2 1 1,
48 Algoritmusok X H Y 1,2 1 0,8 0,6 0,4 0, , 8 1,2 1 0,8 0,6 0,4 0, for(i=1; i<elemszam; i++) *(x+i)=*(y+i) * *(x+i-1);
49 Algoritmusok X H Y 1, ,8 4 0,6 3 0,4 2 0, , for(i=1; i<elemszam; i++) *(x+i)=*(y+i) * *(x+i-1);
50 Jelek leírása frekvenciatartományban A gitár húrjainak megpendítése egy periodikus jelet állít elő. FFT


51 Jelek leírása frekvenciatartományban A gitár húrjainak megpendítése egy periodikus jelet állít elő. FFT
52 Jelek leírása frekvenciatartományban Minden szinuszos periodikus jel leírható: Frekvencia - f (periódusidő) A amplitúdó f frekvencia ϕ fázis Amplitúdó - A t Fázis - ϕ
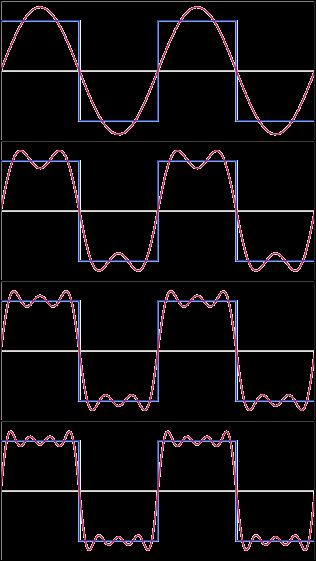
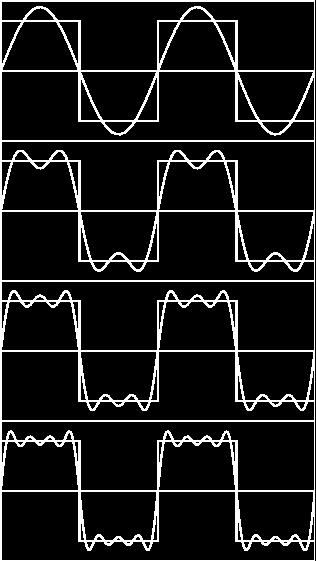
53 Jelek leírása frekvenciatartományban Minden periodikus jel leírható szinuszos jelek összegéből. Ezt hívjuk Fourier sorfejtésnek.
")


54 Jelek leírása frekvenciatartományban Nemperiodikus jelek leírása: Fourier transzformáció végtelen periódusú komponensek folytonos leírás eredmény: komplex frekvenciafüggvény abszolútértéke: amplitúdó-frekvencia függvény (amplitúdóspektrum) argumentuma: fázis-frekvencia függvény (fázisspektrum) F(ω) = f(t)e jωt dt Inverz Fourier-transzformáció: F(t) = 1 2π F(ω)e jωt dω admin. (2006, May 26). Lecture 5: Representation of Nonperiodic Functions. Retrieved January 07, 2011, from Free Online Course Materials USU OpenCourseWare Web site:

55 Euler s identity (azonosság) e iπ + 1 = 0 e - Euler szám, a természetes logaritmus alapja i - képzetes rész, 1 π - pi e ix = cos x + i sin x
")
56 Jelek leírása frekvenciatartományban F(ω) = න f(t)e jωt dt
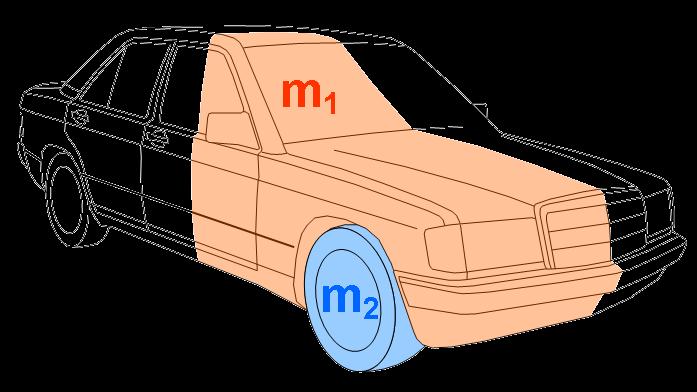
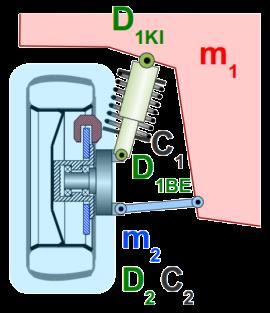
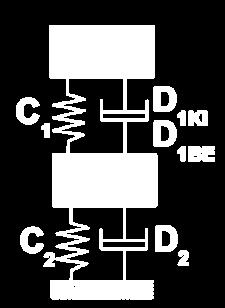
57 Emlékeztetőül Két tömegű lengőrendszer

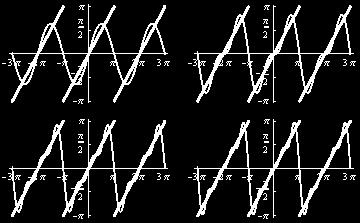
58 Két tömegű lengőrendszer X H Y A bode diagram SISO rendszer átviteli karakterisztikájának ábrázolására szolgál. Kerék rezonanciafrekvenciája Felfüggesztés rezonanciafrekvenciája
59 Bode diagram A be sin ωt H(s) A ki sin ωt + φ Az amplitúdó és a fázis változhat, a frekvencia nem!

60 Bode diagram A be sin ωt H(s) A ki sin ωt + φ Az amplitúdó és a fázis változhat, a frekvencia nem! Lineáris rendszer amplitúdóváltozása Lineáris rendszer fázisváltozása
![Komplex frekvenciaátviteli függvény F ω x ω arg(f ω) f [rad/s] Komplex frekvenciaátviteli](/docs-images/94/121985433/images/61-0.jpg "fv. arg(x ω) Gerjesztőerő (komplex frekvenciafv.) Mozgásmennyiségek (komplex frekvenciafv.")
61 Komplex frekvenciaátviteli függvény F ω x ω arg(f ω) f [rad/s] Komplex frekvenciaátviteli fv. arg(x ω) Gerjesztőerő (komplex frekvenciafv.) Mozgásmennyiségek (komplex frekvenciafv.)
62 State machine - állapotgép Az állapotgép egy matematikai modell, amit gyakran használnak programfejlesztés, digitális áramkörök tervezése és egyéb mérnöki munka során. Példák:» motorvezérlés» kávégép» szövegfeldolgozó» robotkar vezérlése» stb. A lényege, hogy az adott alrendszer csak egy állapotban lehet egyszerre, ebből az átmenetek és az egyes állapotok tevékenységei pontosan definiáltak.
63 State machine - állapotgép Bármilyen programnyelven megvalósítható, több leírása létezik:» szöveges: állapot és tevékenységtáblás» rajzos: UML és sok nem szabványos Mi egy C és LabVIEW nyelvi példát veszünk UML diagrammai»
64 Forrás: A programozás alapjai - Pohl László, Budapest, 2010 Szövegfeldolgozó állapotgéppel Tegyük fel, hogy nem tudjuk, milyen hosszú egy sor» nem olvashatunk tömbbe egy sort» karakterenként olvassunk Szűrjük ki a /*-gal kezdőtő és */-ig tartó kommenteket Szöveg* valami /*komment ** és /*/ hh /*a*/ szöveg
65 4 állapotú state machine implementáció //state machine - állapotgép #include <stdio.h> typedef enum {normal,komment,cs_var,p_var} allapotok; int main(void){ int c; allapotok a = normal; //CTR+Z-ig while((c=getchar())!=eof){ switch (a){ case normal: if(c!='/')putchar(c); else a = cs_var; break; } case cs_var: if(c=='*') a = komment; else{ putchar('/'); if(c!='/'){ putchar(c); a=normal; } } break; case komment: if(c=='*') a = p_var; break; case p_var: if(c=='/') a = normal; else if(c!='*') a = komment; break; } } Forrás: A programozás alapjai - Pohl László, Budapest, 2010
66 Állapottábla Komment /* */ szűrő Állapot * / egyéb normál normál csillagra vár normál csillagra vár megjegyzés csillagra vár normál megjegyzés perre vár megjegyzés megjegyzés perre vár perre vár normál megjegyzés Tevékenységtábla Állapot * / egyéb normál másol nem másol másol csillagra vár nem másol előző / kiírása, nem másol előző / kiírása, másol Forrás: A programozás alapjai - Pohl László, Budapest, 2010
67 Komment /* */ szűrő egyéb, '*' '/' egyéb, '/' '*' normal cs_var megj p_var '/' '*' egyéb egyéb '*' '/' Az implementációba be lehet tenni egy plusz állapotot - végállapotot -, amibe bármikor elérhetünk EOF hatására.
68 Just in case! :) Görög betűk δ - delta θ - theta ω - omega σ - sigma μ - mű Mátrixszorzás =
 Görög betűk δ - delta θ - theta ω - omega σ - sigma μ - mű Mátrixszorzás 2 3 4 1 0 0 0 0")
69 Just in case! :) Görög betűk δ - delta θ - theta ω - omega σ - sigma μ - mű Mátrixszorzás =

70 Mátrixok Mátrixszorzás bemutatása C# tesztprogramon keresztül Ellenőrizzük:
) { c = new float[a.getlength(0), b.getlength(1)]; for (int i = 0; i < c.getlength(0); i++) { for (int j = 0; j < c.getlength(1); j++) { c[i, j] = 0; for (int k = 0; k < a.")
71 Mátrixok A és B mátrix szorzása, eredménye C mátrix, csak akkor lehetséges, ha A mátrix oszlopainak száma megegyezik a B mátrix sorainak számával. if (a.getlength(1) == b.getlength(0)) { c = new float[a.getlength(0), b.getlength(1)]; for (int i = 0; i < c.getlength(0); i++) { for (int j = 0; j < c.getlength(1); j++) { c[i, j] = 0; for (int k = 0; k < a.getlength(1); k++) // vagy k<b.getlength(0) c[i, j] = c[i, j] + a[i, k] * b[k, j]; } } }

72 Kalman filter Kálmán Rudolf Emil (1930 -) Zajos bemenő adatok rekurzív mérésével egy pontosabb becslést ad a mérés tárgyának állapotáról.
73 Bayes-tétel Adott A és B események valószínűsége (P(A) és P(B ), és a P(B A) feltételes valószínűség esetén fennáll a egyenlőség. P A B = P B A P(A) P(B)


74 Normal (Gaussian) distribution Sűrűségfüggvénye: f x = 1 σ Normális eloszlás (x μ) 2 e 2σ 2 2π
75 Felhasznált irodalom A C programozási nyelv - Az ANSI szerinti változat. B. W. Kernighan - D. M. Ritchie; Műszaki Könyvkiadó, 1995 Kuslits M. jegyzetei A programozás alapjai - Pohl L., Budapest, 2010 Differenciálegyenletek numerikus megoldása 2010, Pécsi Tudományegyetem Kollár B. Wikipedia Kollár B.: Differenciálegyenletek numerikus megoldása, 2010
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
LabVIEW Academy. 6. óra state machine
 LabVIEW Academy 6. óra state machine Tartalom Állapotgép Típusdefiníció Fájlok 2 feladat: egy könnyebb és egy kicsit gyakorlatiasabb 2 Szekvenciális programozás Alapértelmezetten nincs szekvenciális futtatás
LabVIEW Academy 6. óra state machine Tartalom Állapotgép Típusdefiníció Fájlok 2 feladat: egy könnyebb és egy kicsit gyakorlatiasabb 2 Szekvenciális programozás Alapértelmezetten nincs szekvenciális futtatás
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 3. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 3. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Differenciálegyenletek numerikus megoldása
 a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
RENDSZERTECHNIKA 8. GYAKORLAT
 RENDSZERTECHNIKA 8. GYAKORLAT ÜTEMTERV VÁLTOZÁS Gyakorlat Hét Dátum Témakör Házi feladat Egyéb 1 1. hét 02.09 Ismétlés, bevezetés Differenciálegyenletek mérnöki 2 2. hét 02.16 szemmel 1. Hf kiadás 3 3.
RENDSZERTECHNIKA 8. GYAKORLAT ÜTEMTERV VÁLTOZÁS Gyakorlat Hét Dátum Témakör Házi feladat Egyéb 1 1. hét 02.09 Ismétlés, bevezetés Differenciálegyenletek mérnöki 2 2. hét 02.16 szemmel 1. Hf kiadás 3 3.
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból
 Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Differenciálegyenletek. Vajda István március 4.
 Analízis előadások Vajda István 2009. március 4. Függvényegyenletek Definíció: Az olyan egyenleteket, amelyekben a meghatározandó ismeretlen függvény, függvényegyenletnek nevezzük. Függvényegyenletek Definíció:
Analízis előadások Vajda István 2009. március 4. Függvényegyenletek Definíció: Az olyan egyenleteket, amelyekben a meghatározandó ismeretlen függvény, függvényegyenletnek nevezzük. Függvényegyenletek Definíció:
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Differenciálegyenletek
 DE 1 Ebben a részben I legyen mindig pozitív hosszúságú intervallum DE Definíció: differenciálegyenlet Ha D n+1 nyílt halmaz, f:d folytonos függvény, akkor az y (n) (x) f ( x, y(x), y'(x),..., y (n-1)
DE 1 Ebben a részben I legyen mindig pozitív hosszúságú intervallum DE Definíció: differenciálegyenlet Ha D n+1 nyílt halmaz, f:d folytonos függvény, akkor az y (n) (x) f ( x, y(x), y'(x),..., y (n-1)
3. Lineáris differenciálegyenletek
 3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
PTE PMMFK Levelező-távoktatás, villamosmérnök szak
 PTE PMMFK Levelező-távoktatás, villamosmérnök szak MATEMATIKA (A tantárgy tartalma és a tananyag elsajátításának időterve.) Összeállította: Kis Miklós adjunktus Tankönyvek Megegyeznek az 1. és 2. félévben
PTE PMMFK Levelező-távoktatás, villamosmérnök szak MATEMATIKA (A tantárgy tartalma és a tananyag elsajátításának időterve.) Összeállította: Kis Miklós adjunktus Tankönyvek Megegyeznek az 1. és 2. félévben
Hurokegyenlet alakja, ha az áram irányával megegyező feszültségeséseket tekintjük pozitívnak:
 Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Differenciálegyenletek numerikus integrálása április 9.
 Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Fourier transzformáció
 a Matematika mérnököknek II. című tárgyhoz Fourier transzformáció Fourier transzformáció, heurisztika Tekintsük egy 2L szerint periodikus függvény Fourier sorát: f (x) = a 0 2 + ( ( nπ ) ( nπ )) a n cos
a Matematika mérnököknek II. című tárgyhoz Fourier transzformáció Fourier transzformáció, heurisztika Tekintsük egy 2L szerint periodikus függvény Fourier sorát: f (x) = a 0 2 + ( ( nπ ) ( nπ )) a n cos
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Irányítástechnika 2. előadás
 Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
JPTE PMMFK Levelező-távoktatás, villamosmérnök szak
 JPTE PMMFK Levelező-távoktatás, villamosmérnök szak MATEMATIKA (A tantárgy tartalma és a tananyag elsajátításának időterve.) (Összeállította: Kis Miklós) Tankönyvek Megegyeznek az 1. félévben használtakkal.
JPTE PMMFK Levelező-távoktatás, villamosmérnök szak MATEMATIKA (A tantárgy tartalma és a tananyag elsajátításának időterve.) (Összeállította: Kis Miklós) Tankönyvek Megegyeznek az 1. félévben használtakkal.
valós számot tartalmaz, mert az ilyen részhalmazon nem azonosság.
 2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
Mátrix-exponens, Laplace transzformáció
 2016. április 4. 2016. április 11. LINEÁRIS DIFFERENCIÁLEGYENLET RENDSZEREK ÉS A MÁTRIX-EXPONENS KAPCSOLATA Feladat - ismétlés Tegyük fel, hogy A(t) = (a ik (t)), i, k = 1,..., n és b(t) folytonos mátrix-függvények
2016. április 4. 2016. április 11. LINEÁRIS DIFFERENCIÁLEGYENLET RENDSZEREK ÉS A MÁTRIX-EXPONENS KAPCSOLATA Feladat - ismétlés Tegyük fel, hogy A(t) = (a ik (t)), i, k = 1,..., n és b(t) folytonos mátrix-függvények
BASH script programozás II. Vezérlési szerkezetek
 06 BASH script programozás II. Vezérlési szerkezetek Emlékeztető Jelölésbeli különbség van parancs végrehajtása és a parancs kimenetére való hivatkozás között PARANCS $(PARANCS) Jelölésbeli különbség van
06 BASH script programozás II. Vezérlési szerkezetek Emlékeztető Jelölésbeli különbség van parancs végrehajtása és a parancs kimenetére való hivatkozás között PARANCS $(PARANCS) Jelölésbeli különbség van
Fourier-sorfejtés vizsgálata Négyszögjel sorfejtése, átviteli vizsgálata
 Fourier-sorfejtés vizsgálata Négyszögjel sorfejtése, átviteli vizsgálata Reichardt, András 27. szeptember 2. 2 / 5 NDSM Komplex alak U C k = T (T ) ahol ω = 2π T, k módusindex. Időfüggvény előállítása
Fourier-sorfejtés vizsgálata Négyszögjel sorfejtése, átviteli vizsgálata Reichardt, András 27. szeptember 2. 2 / 5 NDSM Komplex alak U C k = T (T ) ahol ω = 2π T, k módusindex. Időfüggvény előállítása
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
A MATLAB alapjai. Kezdő lépések. Változók. Aktuális mappa Parancs ablak. Előzmények. Részei. Atomerőművek üzemtana
 A MATLAB alapjai Kezdő lépések - Matlab Promt: >> - Help: >> help sqrt >> doc sqrt - Kilépés: >> quit >> exit >> Futó script leállítása: >> ctrl+c - Változók listásása >> who >> whos - Változók törlése
A MATLAB alapjai Kezdő lépések - Matlab Promt: >> - Help: >> help sqrt >> doc sqrt - Kilépés: >> quit >> exit >> Futó script leállítása: >> ctrl+c - Változók listásása >> who >> whos - Változók törlése
ODE SOLVER-ek használata a MATLAB-ban
 ODE SOLVER-ek használata a MATLAB-ban Mi az az ODE? ordinary differential equation Milyen ODE megoldók vannak a MATLAB-ban? ode45, ode23, ode113, ode15s, ode23s, ode23t, ode23tb, stb. A részletes leírásuk
ODE SOLVER-ek használata a MATLAB-ban Mi az az ODE? ordinary differential equation Milyen ODE megoldók vannak a MATLAB-ban? ode45, ode23, ode113, ode15s, ode23s, ode23t, ode23tb, stb. A részletes leírásuk
Jelfeldolgozás. Gyakorlat: A tantermi gyakorlatokon való részvétel kötelező! Kollokvium: csak gyakorlati jeggyel!
 1 Jelfeldolgozás Jegyzet: http://itl7.elte.hu : Elektronika jegyzet (Csákány A., ELTE TTK 119) Jelek feldolgozása (Bagoly Zs. Csákány A.) angol nyelv DSP (PDF) jegyzet Gyakorlat: A tantermi gyakorlatokon
1 Jelfeldolgozás Jegyzet: http://itl7.elte.hu : Elektronika jegyzet (Csákány A., ELTE TTK 119) Jelek feldolgozása (Bagoly Zs. Csákány A.) angol nyelv DSP (PDF) jegyzet Gyakorlat: A tantermi gyakorlatokon
1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1
![1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1](/thumbs/88/116339870.jpg "1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1") numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
Matematika szigorlat június 17. Neptun kód:
 Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
ÁRAMKÖRÖK SZIMULÁCIÓJA
 ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
HÁZI FELADATOK. 2. félév. 1. konferencia Komplex számok
 Figyelem! A feladatok megoldása legyen áttekinthet és részletes, de férjen el az arra szánt helyen! Ha valamelyik HÁZI FELADATOK. félév. konferencia Komple számok Értékelés:. egység: önálló feladatmegoldás
Figyelem! A feladatok megoldása legyen áttekinthet és részletes, de férjen el az arra szánt helyen! Ha valamelyik HÁZI FELADATOK. félév. konferencia Komple számok Értékelés:. egység: önálló feladatmegoldás
Gauss-Jordan módszer Legkisebb négyzetek módszere, egyenes LNM, polinom LNM, függvény. Lineáris algebra numerikus módszerei
 A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
Differenciálegyenlet rendszerek
 Differenciálegyenlet rendszerek (A kezdeti érték probléma. Lineáris differenciálegyenlet rendszerek, magasabb rendű lineáris egyenletek.) Szili László: Modellek és algoritmusok ea+gyak jegyzet alapján
Differenciálegyenlet rendszerek (A kezdeti érték probléma. Lineáris differenciálegyenlet rendszerek, magasabb rendű lineáris egyenletek.) Szili László: Modellek és algoritmusok ea+gyak jegyzet alapján
YBL - SGYMMAT2012XA Matematika II.
 YBL - SGYMMAT2012XA Matematika II. Tantárgyfelelős: Dr. Joós Antal Tárgyelőadó: Dr. Joós Antal Tantárgyi leírás Oktatási cél: Azoknak a matematikai alapoknak a megszerzése, melyek a szaktárgyak elsajátításához
YBL - SGYMMAT2012XA Matematika II. Tantárgyfelelős: Dr. Joós Antal Tárgyelőadó: Dr. Joós Antal Tantárgyi leírás Oktatási cél: Azoknak a matematikai alapoknak a megszerzése, melyek a szaktárgyak elsajátításához
Konjugált gradiens módszer
 Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Simított részecskedinamika Smoothed Particle Hydrodynamics (SPH)
") Smoothed Particle Hydrodynamics (SPH) Áramlások numerikus modellezése II. Tóth Balázs BME-ÉMK Vízépítési és Vízgazdálkodási Tanszék Numerikus módszerek Osztályozás A numerikus sémák két csoportosítási
Smoothed Particle Hydrodynamics (SPH) Áramlások numerikus modellezése II. Tóth Balázs BME-ÉMK Vízépítési és Vízgazdálkodási Tanszék Numerikus módszerek Osztályozás A numerikus sémák két csoportosítási
Matematika szigorlat, Mérnök informatikus szak I máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.
 Matematika szigorlat, Mérnök informatikus szak I. 2009. máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.: 180 perc 0-49 pont: elégtelen, 50-61 pont: elégséges, 62-73 pont:
Matematika szigorlat, Mérnök informatikus szak I. 2009. máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.: 180 perc 0-49 pont: elégtelen, 50-61 pont: elégséges, 62-73 pont:
0-49 pont: elégtelen, pont: elégséges, pont: közepes, pont: jó, pont: jeles
 Matematika szigorlat, Mérnök informatikus szak I. 2013. jan. 10. Név: Neptun kód: Idő: 180 perc Elm.: 1. f. 2. f. 3. f. 4. f. 5. f. Fel. össz.: Össz.: Oszt.: Az elérhető pontszám 40 (elmélet) + 60 (feladatok)
Matematika szigorlat, Mérnök informatikus szak I. 2013. jan. 10. Név: Neptun kód: Idő: 180 perc Elm.: 1. f. 2. f. 3. f. 4. f. 5. f. Fel. össz.: Össz.: Oszt.: Az elérhető pontszám 40 (elmélet) + 60 (feladatok)
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 4. óra Mingesz Róbert Szegedi Tudományegyetem 2012. február 27. MA - 4. óra Verzió: 2.1 Utolsó frissítés: 2012. március 12. 1/41 Tartalom I 1 Jelek 2 Mintavételezés 3 A/D konverterek
Mérés és adatgyűjtés 4. óra Mingesz Róbert Szegedi Tudományegyetem 2012. február 27. MA - 4. óra Verzió: 2.1 Utolsó frissítés: 2012. március 12. 1/41 Tartalom I 1 Jelek 2 Mintavételezés 3 A/D konverterek
MATE-INFO UBB verseny, március 25. MATEMATIKA írásbeli vizsga
 BABEŞ-BOLYAI TUDOMÁNYEGYETEM, KOLOZSVÁR MATEMATIKA ÉS INFORMATIKA KAR MATE-INFO UBB verseny, 218. március 25. MATEMATIKA írásbeli vizsga FONTOS TUDNIVALÓK: 1 A feleletválasztós feladatok,,a rész esetén
BABEŞ-BOLYAI TUDOMÁNYEGYETEM, KOLOZSVÁR MATEMATIKA ÉS INFORMATIKA KAR MATE-INFO UBB verseny, 218. március 25. MATEMATIKA írásbeli vizsga FONTOS TUDNIVALÓK: 1 A feleletválasztós feladatok,,a rész esetén
Baran Ágnes, Burai Pál, Noszály Csaba. Gyakorlat Differenciálegyenletek numerikus megoldása
 Matematika Mérnököknek 2. Baran Ágnes, Burai Pál, Noszály Csaba Gyakorlat Differenciálegyenletek numerikus megoldása Baran Ágnes, Burai Pál, Noszály Csaba Matematika Mérnököknek 2. Gyakorlat 1 / 18 Fokozatos
Matematika Mérnököknek 2. Baran Ágnes, Burai Pál, Noszály Csaba Gyakorlat Differenciálegyenletek numerikus megoldása Baran Ágnes, Burai Pál, Noszály Csaba Matematika Mérnököknek 2. Gyakorlat 1 / 18 Fokozatos
LabVIEW példák és bemutatók KÉSZÍTETTE: DR. FÜVESI VIKTOR
 LabVIEW példák és bemutatók KÉSZÍTETTE: DR. FÜVESI VIKTOR LabVIEW-ról National Instruments (NI) által fejlesztett Grafikus programfejlesztő környezet, méréstechnikai, vezérlési, jelfeldolgozási feladatok
LabVIEW példák és bemutatók KÉSZÍTETTE: DR. FÜVESI VIKTOR LabVIEW-ról National Instruments (NI) által fejlesztett Grafikus programfejlesztő környezet, méréstechnikai, vezérlési, jelfeldolgozási feladatok
Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait.
 Közönséges differenciálegyenletek Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait. Célunk a függvény meghatározása Egyetlen független
Közönséges differenciálegyenletek Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait. Célunk a függvény meghatározása Egyetlen független
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
MECHATRONIKA Mechatronika alapképzési szak (BSc) záróvizsga kérdései. (Javítás dátuma: )
 záróvizsga kérdései. (Javítás dátuma: )") MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
Irányítástechnika II. előadásvázlat
 Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Runge-Kutta módszerek
 Runge-Kutta módszerek A Runge-Kutta módszerek az Euler módszer továbbfejlesztésének, javításának tekinthetők, kezdeti értékkel definiált differenciál egyenletek megoldására. Előnye hogy a megoldás során
Runge-Kutta módszerek A Runge-Kutta módszerek az Euler módszer továbbfejlesztésének, javításának tekinthetők, kezdeti értékkel definiált differenciál egyenletek megoldására. Előnye hogy a megoldás során
Baran Ágnes, Burai Pál, Noszály Csaba. Gyakorlat Differenciálegyenletek
 Matematika Mérnököknek 2. Baran Ágnes, Burai Pál, Noszály Csaba Gyakorlat Differenciálegyenletek Baran Ágnes, Burai Pál, Noszály Csaba Matematika Mérnököknek 2. 1.-2. Gyakorlat 1 / 42 Numerikus differenciálás
Matematika Mérnököknek 2. Baran Ágnes, Burai Pál, Noszály Csaba Gyakorlat Differenciálegyenletek Baran Ágnes, Burai Pál, Noszály Csaba Matematika Mérnököknek 2. 1.-2. Gyakorlat 1 / 42 Numerikus differenciálás
Wavelet transzformáció
 1 Wavelet transzformáció Más felbontás: Walsh, Haar, wavelet alapok! Eddig: amplitúdó vagy frekvencia leírás: Pl. egy rövid, Dirac-delta jellegű impulzus Fourier-transzformált: nagyon sok, kb. ugyanolyan
1 Wavelet transzformáció Más felbontás: Walsh, Haar, wavelet alapok! Eddig: amplitúdó vagy frekvencia leírás: Pl. egy rövid, Dirac-delta jellegű impulzus Fourier-transzformált: nagyon sok, kb. ugyanolyan
Matematikai programok
 Matematikai programok Mátrixalapú nyelvek MatLab Wettl Ferenc diái alapján Budapesti M szaki Egyetem Algebra Tanszék 2017.11.07 Borbély Gábor (BME Algebra Tanszék) Matematikai programok 2017.11.07 1 /
Matematikai programok Mátrixalapú nyelvek MatLab Wettl Ferenc diái alapján Budapesti M szaki Egyetem Algebra Tanszék 2017.11.07 Borbély Gábor (BME Algebra Tanszék) Matematikai programok 2017.11.07 1 /
n n (n n ), lim ln(2 + 3e x ) x 3 + 2x 2e x e x + 1, sin x 1 cos x, lim e x2 1 + x 2 lim sin x 1 )
, lim ln(2 + 3e x ) x 3 + 2x 2e x e x + 1, sin x 1 cos x, lim e x2 1 + x 2 lim sin x 1 )") Matek szigorlat Komplex számok Sorozat határérték., a legnagyobb taggal egyszerűsítünk n n 3 3n 2 + 2 3n 2 n n + 2 25 n 3 9 n 2 + + 3) 2n 8 n 3 2n 3,, n n5 + n 2 n 2 5 2n + 2 3n 2) n+ 2. e-ados: + a )
Matek szigorlat Komplex számok Sorozat határérték., a legnagyobb taggal egyszerűsítünk n n 3 3n 2 + 2 3n 2 n n + 2 25 n 3 9 n 2 + + 3) 2n 8 n 3 2n 3,, n n5 + n 2 n 2 5 2n + 2 3n 2) n+ 2. e-ados: + a )
Inga. Szőke Kálmán Benjamin SZKRADT.ELTE május 18. A jegyzőkönyv célja a matematikai és fizikai inga szimulációja volt.
 Inga Szőke Kálmán Benjamin SZKRADT.ELTE 2012. május 18. 1. Bevezetés A jegyzőkönyv célja a matematikai és fizikai inga szimulációja volt. A program forráskódját a labor honlapjáról lehetett elérni, és
Inga Szőke Kálmán Benjamin SZKRADT.ELTE 2012. május 18. 1. Bevezetés A jegyzőkönyv célja a matematikai és fizikai inga szimulációja volt. A program forráskódját a labor honlapjáról lehetett elérni, és
Numerikus módszerek. 9. előadás
 Numerikus módszerek 9. előadás Differenciálegyenletek integrálási módszerei x k dx k dt = f x,t; k k ' k, k '=1,2,... M FELADAT: meghatározni x k t n x k, n egyenletes időlépés??? t n =t 0 n JELÖLÉS: f
Numerikus módszerek 9. előadás Differenciálegyenletek integrálási módszerei x k dx k dt = f x,t; k k ' k, k '=1,2,... M FELADAT: meghatározni x k t n x k, n egyenletes időlépés??? t n =t 0 n JELÖLÉS: f
Jelek és rendszerek 1. 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék
 Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Numerikus módszerek: Nemlineáris egyenlet megoldása (Newton módszer, húrmódszer). Lagrange interpoláció. Lineáris regresszió.
. Lagrange interpoláció. Lineáris regresszió.") YBL - SGYMMAT202XXX Matematika II. Tantárgyfelelős: Dr. Joós Antal Tárgyelőadó: Dr. Joós Antal Tantárgyi leírás Oktatási cél: Azoknak a matematikai alapoknak a megszerzése, melyek a szaktárgyak elsajátításához
YBL - SGYMMAT202XXX Matematika II. Tantárgyfelelős: Dr. Joós Antal Tárgyelőadó: Dr. Joós Antal Tantárgyi leírás Oktatási cél: Azoknak a matematikai alapoknak a megszerzése, melyek a szaktárgyak elsajátításához
MATLAB. 8. gyakorlat. Differenciálegyenletek
 MATLAB 8. gyakorlat Differenciálegyenletek Menetrend Kis ZH Differenciálegyenletek általában Elsőrendű differenciálegyenletek Másodrendű differenciálegyenletek Kis ZH pdf Differenciálegyenletek Diffegyenlet:
MATLAB 8. gyakorlat Differenciálegyenletek Menetrend Kis ZH Differenciálegyenletek általában Elsőrendű differenciálegyenletek Másodrendű differenciálegyenletek Kis ZH pdf Differenciálegyenletek Diffegyenlet:
Valószínűségi változók. Várható érték és szórás
 Matematikai statisztika gyakorlat Valószínűségi változók. Várható érték és szórás Valószínűségi változók 2016. március 7-11. 1 / 13 Valószínűségi változók Legyen a (Ω, A, P) valószínűségi mező. Egy X :
Matematikai statisztika gyakorlat Valószínűségi változók. Várható érték és szórás Valószínűségi változók 2016. március 7-11. 1 / 13 Valószínűségi változók Legyen a (Ω, A, P) valószínűségi mező. Egy X :
2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve trigonometrikus alakban vannak megadva?
 = komolyabb bizonyítás (jeleshez) Ellenőrző kérdések 2006 ősz 1. Definiálja a komplex szám és műveleteinek fogalmát! 2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve
= komolyabb bizonyítás (jeleshez) Ellenőrző kérdések 2006 ősz 1. Definiálja a komplex szám és műveleteinek fogalmát! 2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve
Utolsó el adás. Wettl Ferenc BME Algebra Tanszék, Wettl Ferenc (BME) Utolsó el adás / 20
 Utolsó el adás / 20") Utolsó el adás Wettl Ferenc BME Algebra Tanszék, http://www.math.bme.hu/~wettl 2013-12-09 Wettl Ferenc (BME) Utolsó el adás 2013-12-09 1 / 20 1 Dierenciálegyenletek megoldhatóságának elmélete 2 Parciális
Utolsó el adás Wettl Ferenc BME Algebra Tanszék, http://www.math.bme.hu/~wettl 2013-12-09 Wettl Ferenc (BME) Utolsó el adás 2013-12-09 1 / 20 1 Dierenciálegyenletek megoldhatóságának elmélete 2 Parciális
Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek
 Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E
Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E
Lineáris algebra numerikus módszerei
 Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Matematikai programok
 Matematikai programok Mátrixalapú nyelvek octave Wettl Ferenc Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Wettl
Matematikai programok Mátrixalapú nyelvek octave Wettl Ferenc Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Wettl
MODELLEZÉS - SZIMULÁCIÓ
 Mechatronika = Mechanikai elemek+ elektromechanikai átalakítók+ villamos rendszerek+ számítógép elemek integrációja Eszközök, rendszerek, gépek és szerkezetek felügyeletére, vezérlésére (manapság miniatürizált)
Mechatronika = Mechanikai elemek+ elektromechanikai átalakítók+ villamos rendszerek+ számítógép elemek integrációja Eszközök, rendszerek, gépek és szerkezetek felügyeletére, vezérlésére (manapság miniatürizált)
Márkus Zsolt Tulajdonságok, jelleggörbék, stb BMF -
 Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
BIOMATEMATIKA ELŐADÁS
 BIOMATEMATIKA ELŐADÁS 6. Differenciálegyenletekről röviden Debreceni Egyetem, 2015 Dr. Bérczes Attila, Bertók Csanád A diasor tartalma 1 Bevezetés 2 Elsőrendű differenciálegyenletek Definíciók Kezdetiérték-probléma
BIOMATEMATIKA ELŐADÁS 6. Differenciálegyenletekről röviden Debreceni Egyetem, 2015 Dr. Bérczes Attila, Bertók Csanád A diasor tartalma 1 Bevezetés 2 Elsőrendű differenciálegyenletek Definíciók Kezdetiérték-probléma
3. Előadás. Megyesi László: Lineáris algebra, oldal. 3. előadás Lineáris egyenletrendszerek
 3. Előadás Megyesi László: Lineáris algebra, 47. 50. oldal. Gondolkodnivalók Determinánsok 1. Gondolkodnivaló Determinánselméleti tételek segítségével határozzuk meg a következő n n-es determinánst: 1
3. Előadás Megyesi László: Lineáris algebra, 47. 50. oldal. Gondolkodnivalók Determinánsok 1. Gondolkodnivaló Determinánselméleti tételek segítségével határozzuk meg a következő n n-es determinánst: 1
Diszkréten mintavételezett függvények
 Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
12. Mikor nevezünk egy részhalmazt nyíltnak, illetve zártnak a valós számok körében?
 Ellenörző Kérdések 1. Mit jelent az, hogy egy f : A B függvény injektív, szürjektív, illetve bijektív? 2. Mikor nevezünk egy függvényt invertálhatónak? 3. Definiálja a komplex szám és műveleteinek fogalmát!
Ellenörző Kérdések 1. Mit jelent az, hogy egy f : A B függvény injektív, szürjektív, illetve bijektív? 2. Mikor nevezünk egy függvényt invertálhatónak? 3. Definiálja a komplex szám és műveleteinek fogalmát!
Elhangzott gyakorlati tananyag óránkénti bontásban. Mindkét csoport. Rövidítve.
 TTK, Matematikus alapszak Differenciálegyenletek 1 (BMETE93AM15) Elhangzott gyakorlati tananyag óránkénti bontásban Mindkét csoport Rövidítve 1 gyakorlat 017 szeptember 7 T01 csoport Elsőrendű közönséges
TTK, Matematikus alapszak Differenciálegyenletek 1 (BMETE93AM15) Elhangzott gyakorlati tananyag óránkénti bontásban Mindkét csoport Rövidítve 1 gyakorlat 017 szeptember 7 T01 csoport Elsőrendű közönséges
Jelek és rendszerek - 4.előadás
 Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Matematika II. 1 sin xdx =, 1 cos xdx =, 1 + x 2 dx =
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
Feladatok a Gazdasági matematika II. tárgy gyakorlataihoz
 Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Gyakorló feladatok I.
 Gyakorló feladatok I. a Matematika Aa Vektorüggvények tárgyhoz (D D5 kurzusok) Összeállította: Szili László Ajánlott irodalmak:. G.B. Thomas, M.D. Weir, J. Hass, F.R. Giordano: Thomas-féle KALKULUS I.,
Gyakorló feladatok I. a Matematika Aa Vektorüggvények tárgyhoz (D D5 kurzusok) Összeállította: Szili László Ajánlott irodalmak:. G.B. Thomas, M.D. Weir, J. Hass, F.R. Giordano: Thomas-féle KALKULUS I.,
1. Számsorok, hatványsorok, Taylor-sor, Fourier-sor
 . Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következő végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle belső konvergenciakritérium) A a n végtelen sor akkor és csakis
. Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következő végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle belső konvergenciakritérium) A a n végtelen sor akkor és csakis
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Gazdasági matematika II. vizsgadolgozat megoldása, június 10
 Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Gauss-eliminációval, Cholesky felbontás, QR felbontás
 Közelítő és szimbolikus számítások 4. gyakorlat Mátrix invertálás Gauss-eliminációval, Cholesky felbontás, QR felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei
Közelítő és szimbolikus számítások 4. gyakorlat Mátrix invertálás Gauss-eliminációval, Cholesky felbontás, QR felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei
Mátrixok 2017 Mátrixok
 2017 számtáblázatok" : számok rendezett halmaza, melyben a számok helye két paraméterrel van meghatározva. Például lineáris egyenletrendszer együtthatómátrixa 2 x 1 + 4 x 2 = 8 1 x 1 + 3 x 2 = 1 ( 2 4
2017 számtáblázatok" : számok rendezett halmaza, melyben a számok helye két paraméterrel van meghatározva. Például lineáris egyenletrendszer együtthatómátrixa 2 x 1 + 4 x 2 = 8 1 x 1 + 3 x 2 = 1 ( 2 4
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 3 III. VÉLETLEN VEKTOROK 1. A KÉTDIMENZIÓs VÉLETLEN VEKTOR Definíció: Az leképezést (kétdimenziós) véletlen vektornak nevezzük, ha Definíció:
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 3 III. VÉLETLEN VEKTOROK 1. A KÉTDIMENZIÓs VÉLETLEN VEKTOR Definíció: Az leképezést (kétdimenziós) véletlen vektornak nevezzük, ha Definíció:
Történeti Áttekintés
 Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
SCHRÖDINGER-EGYENLET SCHRÖDINGER-EGYENLET
 SCHRÖDINGER-EGYENLET A Scrödinger-egyenlet a kvantummecanika mozgásegyenlet, Newton II. törvényével analóg. Nem vezetető le korábbi elvekből, de intuitívan bevezetető. Egy atározott energiával és impulzussal
SCHRÖDINGER-EGYENLET A Scrödinger-egyenlet a kvantummecanika mozgásegyenlet, Newton II. törvényével analóg. Nem vezetető le korábbi elvekből, de intuitívan bevezetető. Egy atározott energiával és impulzussal
PTE PMMFK Levelező-távoktatás, villamosmérnök szak
 PTE PMMFK Levelező-távoktatás, villamosmérnök szak MATEMATIKA (A tantárgy tartalma és a tananyag elsajátításának időterve.) Összeállította: Kis Miklós adjunktus Tankönyvek (mindhárom félévre): 1. Scharnitzky
PTE PMMFK Levelező-távoktatás, villamosmérnök szak MATEMATIKA (A tantárgy tartalma és a tananyag elsajátításának időterve.) Összeállította: Kis Miklós adjunktus Tankönyvek (mindhárom félévre): 1. Scharnitzky
Ipari matematika 2. gyakorlófeladatok
 Ipari matematika. gyakorlófeladatok. december 5. A feladatok megoldása általában többféle úton is kiszámítató. Interpoláció a. Polinom-interpoláció segítségével adjunk közelítést sin π értékére a sin =,
Ipari matematika. gyakorlófeladatok. december 5. A feladatok megoldása általában többféle úton is kiszámítató. Interpoláció a. Polinom-interpoláció segítségével adjunk közelítést sin π értékére a sin =,
illetve, mivel előjelét a elnyeli, a szinuszból pedig kiemelhető: = " 3. = + " 2 = " 2 % &' + +
 DFT 1. oldal A Fourier-sorfejtés szerint minden periodikus jel egyértelműen felírható különböző amplitúdójú és fázisú szinusz és koszinusz jelek összegeként: = + + 1. ahol az együtthatók, szintén a definíció
DFT 1. oldal A Fourier-sorfejtés szerint minden periodikus jel egyértelműen felírható különböző amplitúdójú és fázisú szinusz és koszinusz jelek összegeként: = + + 1. ahol az együtthatók, szintén a definíció
MATLAB OKTATÁS 4. ELŐADÁS LINEÁRIS, NEMLINEÁRIS ÉS DIFFERENCIÁL- EGYENLETRENDSZEREK MEGOLDÁSA. Dr. Bécsi Tamás Hegedüs Ferenc
 MATLAB OKTATÁS 4. ELŐADÁS LINEÁRIS, NEMLINEÁRIS ÉS DIFFERENCIÁL- EGYENLETRENDSZEREK MEGOLDÁSA Dr. Bécsi Tamás Hegedüs Ferenc LINEÁRIS EGYENLETRENDSZEREK MEGOLDÁSA A MATLAB a lineáris egyenletrendszerek
MATLAB OKTATÁS 4. ELŐADÁS LINEÁRIS, NEMLINEÁRIS ÉS DIFFERENCIÁL- EGYENLETRENDSZEREK MEGOLDÁSA Dr. Bécsi Tamás Hegedüs Ferenc LINEÁRIS EGYENLETRENDSZEREK MEGOLDÁSA A MATLAB a lineáris egyenletrendszerek
Numerikus integrálás április 20.
 Numerikus integrálás 2017. április 20. Integrálás A deriválás papíron is automatikusan elvégezhető feladat. Az analitikus integrálás ezzel szemben problémás vannak szabályok, de nem minden integrálható
Numerikus integrálás 2017. április 20. Integrálás A deriválás papíron is automatikusan elvégezhető feladat. Az analitikus integrálás ezzel szemben problémás vannak szabályok, de nem minden integrálható
A maximum likelihood becslésről
 A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
sin x = cos x =? sin x = dx =? dx = cos x =? g) Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!
 Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!") Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Folytonos rendszeregyenletek megoldása. 1. Folytonos idejű (FI) rendszeregyenlet általános alakja
 rendszeregyenlet általános alakja") Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
Folytonos rendszeregyenletek megoldása 1. Folytonos idejű (FI) rendszeregyenlet általános alakja A folytonos rendszeregyenletek megoldásakor olyan rendszerekkel foglalkozunk, amelyeknek egyetlen u = u(t)
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Közönséges differenciálegyenletek megoldása Mapleben
 Közönséges differenciálegyenletek megoldása Mapleben Differenciálegyenlet alatt egy olyan egyenletet értünk, amelyben a meghatározandó ismeretlen egy függvény, és az egyenlet tartalmazza az ismeretlen
Közönséges differenciálegyenletek megoldása Mapleben Differenciálegyenlet alatt egy olyan egyenletet értünk, amelyben a meghatározandó ismeretlen egy függvény, és az egyenlet tartalmazza az ismeretlen
4. Laplace transzformáció és alkalmazása
 4. Laplace transzformáció és alkalmazása 4.1. Laplace transzformált és tulajdonságai Differenciálegyenletek egy csoportja algebrai egyenletté alakítható. Ennek egyik eszköze a Laplace transzformáció. Definíció:
4. Laplace transzformáció és alkalmazása 4.1. Laplace transzformált és tulajdonságai Differenciálegyenletek egy csoportja algebrai egyenletté alakítható. Ennek egyik eszköze a Laplace transzformáció. Definíció:
Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz
 Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz 1. Hogyan lehet osztályozni a jeleket időfüggvényük időtartama szerint? 2. Mi a periodikus jelek definiciója? (szöveg, képlet, 3. Milyen
Ellenőrző kérdések a Jelanalízis és Jelfeldolgozás témakörökhöz 1. Hogyan lehet osztályozni a jeleket időfüggvényük időtartama szerint? 2. Mi a periodikus jelek definiciója? (szöveg, képlet, 3. Milyen
A brachistochron probléma megoldása
 A brachistochron probléma megoldása Adott a függőleges síkban két nem egy függőleges egyenesen fekvő P 0 és P 1 pont, amelyek közül a P 1 fekszik alacsonyabban. Azt a kérdést fogjuk vizsgálni. hogy van-e
A brachistochron probléma megoldása Adott a függőleges síkban két nem egy függőleges egyenesen fekvő P 0 és P 1 pont, amelyek közül a P 1 fekszik alacsonyabban. Azt a kérdést fogjuk vizsgálni. hogy van-e
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Irányítástechnika. II. rész. Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu
 Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont