Hurokegyenlet alakja, ha az áram irányával megegyező feszültségeséseket tekintjük pozitívnak:
|
|
|
- Nándor Gáspár
- 6 évvel ezelőtt
- Látták:
Átírás
1 Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül egy fizikai rendszer időtartománybeli leírása, annak modellezése szoftveresen. Továbbá ugyanazon feladaton keresztül megvalósításra kerül az operátor tartománybeli és állapot változós leírásmód is. Időtartománybeli leírás és annak modellezése Tekintsük az alábbi fizikai rendszert: R L Ube i C Először felírjuk az időtartománybeli egyenletet a huroktörvény segítségével. A hurok törvény azt mondja ki, hogy egy zárt hurokban a feszültségek előjeles összege zérus. L, R és C legyen egységnyi nagyságú. Ellenálláson eső feszültség: R i Induktivitáson eső feszültség: L di Kondenzátoron eső feszültség: i C Hurokegyenlet alakja, ha az áram irányával megegyező feszültségeséseket tekintjük pozitívnak: R i + L di + C i u be = 0 (0) A SIMULINK modell előállításához ki kell fejezni a legmagasabb rendű deriváltat az egyenletből, aminek az alakja a következő: di = u be L C L i R i () L A modell megalkotásához nyissuk meg a Matlab-ot és készítsünk egy új Simulink modellt.


2 A modellt funkció blokkok segítségével építjük fel, amik a Simulink library-ből érhetőek el. A blokkok be és kimeneteinek száma attól függ, hogy milyen funkciót lát el. A Source típusúaknak csak kimenetük van, míg a scope -nak csak egy bemenete van, kimenete nincs.

3 A kapott differenciál-egyenlet előállítását Simulinkben a következőképpen végezzük: Először legmagasabb rendű derivált integrálásával előállítjuk annak alacsonyabb rendű deriváltjait. di/ i Integrál i Ezt követően az alacsonyabb rendű deriváltakat megszorozzuk az állandójukkal, majd előjelhelyesen összegezve azokat megkapjuk a di/-t. Az összegző blokk beállítási menüje két bal kattintással érhető el.
 Final value: ugrást követő érték (végérték) Valamely változó")
4 Az U 0 bemenő jelet egy egységugrás függvénnyel állítjuk elő, amit a step nevű blokkal valósítunk meg, ez a source almappában található meg. A Step blokk beállítása ugyanúgy dupla bal kattintással történik: Step time: holtidő Initial value: ugrás előtti érték (kezdeti érték) Final value: ugrást követő érték (végérték) Valamely változó vizsgálatát a Scope blokk segítségével végezhetjük el. Jelen esetben a kondenzátoron eső feszültség változását figyeljük.
 ) = s X(s) ( dn x(t) n ) = sn X(s) ( x(t) ) = s X(s) ((t)) = s (t (t)) = s 2 Végezzük el a")
5 A következőkben ugyanennek a fizikai rendszernek állítjuk elő az átviteli függvényét Laplace transzformálás segítségével. A Laplace transzformálás elvégzéséhez szükség van néhány szabály ismeretére, amelyek a következők: ( dx(t) ) = s X(s) ( dn x(t) n ) = sn X(s) ( x(t) ) = s X(s) ((t)) = s (t (t)) = s 2 Végezzük el a Laplace transzformációt a (0) egyenleten: (R i + L di + C i u be) = R I(s) + L s I(s) + C s I(s) U be(s) = 0 (2) Kimenő jelnek ismét tekintsük a kondenzátoron eső feszültséget, bemenő jelnek a kapocsfeszültséget. Az átviteli függvény definíciója miatt: Y(s) = x ki(s) x be (s) = C s I(s) U be (s) Osszuk el a 2-es egyenletet R i(s) L s i(s) + + C s I(s) Ube(s) I(s) C s C s I(s) I(s) C s C s I(s)-el. C s I(s) = 0 Egyszerűsítsük a kapott egyenletet:

6 R C s + L C s 2 + Y(s) = 0 Rendezzük át az egyenletet Y(s) = R C s + L C s2 + Vegyük mindkét oldal reciprokát: Y(s) = + R C s + L C s 2 A kapott kifejezés egy P2T, azaz két tárolós arányos tag, aminek az általános alakja a következőképpen néz ki: P2T = A p + 2 ξ T s + T 2 s 2 A p = T = L C ξ = R C 2 L C Most valósítsuk meg az alaptagokat a Transfer function nevű blokk segítségével! Ennek a blokknak a segítségével bármilyen tag megvalósítható. Egy tag általános alakja a következő: Ha: A s i α n s n + α n s n + α s + β m s m + β m s m + β s + i = 0 arányos jelleg i integráló jelleg i differenciáló jelleg Ahol a számlálót a SIMULINK numerátornak a nevezőt pedig denumerátornak hívja. A Transfer Function beállítása ez alapján történik:
 A differenciáló tag egységugrás bemenetre, végtelen nagyon kimenetet eredményez. Ezért ez nem megvalósítható jelen esetben.")
 = A D s Arányos egytárolós tag (PT) Integráló egytárolós tag (IT) Differenciáló egytárolós tag (DT) Y(s) = A p +T s Y(s) = s A i")
7 Arányos tag (P) és átmeneti függvénye: Y(s) = A p Integráló tag (I) és átmeneti függvénye: Y(s) = A I s (citromsárga bemenet, lila kimenet) A differenciáló tag egységugrás bemenetre, végtelen nagyon kimenetet eredményez. Ezért ez nem megvalósítható jelen esetben. Tiszta differenciáló tag a természetben sem fordul elő! Y(s) = A D s Arányos egytárolós tag (PT) Integráló egytárolós tag (IT) Differenciáló egytárolós tag (DT) Y(s) = A p +T s Y(s) = s A i +T s Y(s) = s A d +T s Két tárolós arányos tag (P2T) Y(s) = A p +2 ξ T s+t 2 s 2
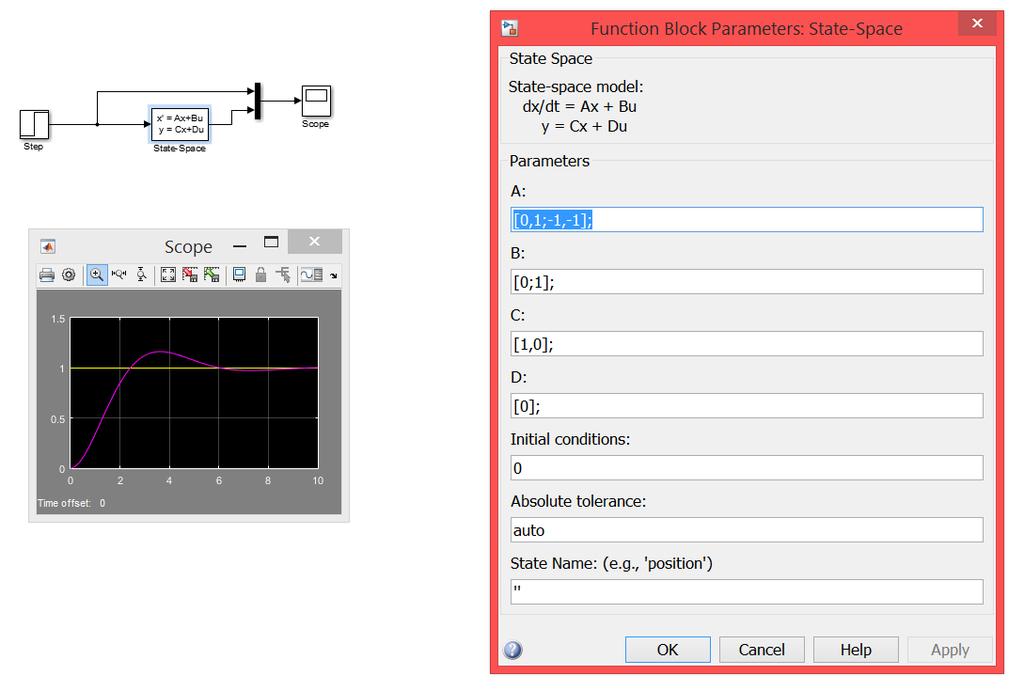
8 A következőben az RLC kör állapotegyenleteit írjuk fel. Az állapot egyenletek általános alakja a következő: x = A x + B u v = C x + D u A 0 egyenletbe új állapotváltozókat vezetünk be: R i + L di + C i U be = 0 A változók indexeit úgy célszerű sorrendben megadni, hogy a legalacsonyabb rendű derivált az -es indexű. i = x i = x 2 Írjuk át az egyenletet az állapotváltozókkal: R x 2 + L dx 2 + C x U be = 0 Ezt követően az x vektort kell felírni x = dx x 2 = dx 2 = d i = i = x 2 = di = U be L C L x R L x 2 Most már egyszerűen felírhatóak az állapot egyenletek. ( x x 2 0 ) = ( C L R ) ( x 0 x ) + ( ) u 2 L L A vizsgált jel változatlanul a kondenzátoron eső feszültség, így a vizsgáló jel állapotegyenlete a következő: v = ( C 0) (x x 2 ) + 0 u Az állapotegyenletes leírásmód megvalósítása SIMULINK segítségével a következőképpen néz ki:
9
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból
 Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Irányítástechnika 2. előadás
 Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Négypólusok tárgyalása Laplace transzformációval
 Négypólusok tárgyalása Laplace transzformációval Segédlet az Elektrotechnika II. c. tantárgyhoz Összeállította: Dr. Kurutz Károly egyetemi tanár Szászi István egyetemi tanársegéd . Laplace transzformáció
Négypólusok tárgyalása Laplace transzformációval Segédlet az Elektrotechnika II. c. tantárgyhoz Összeállította: Dr. Kurutz Károly egyetemi tanár Szászi István egyetemi tanársegéd . Laplace transzformáció
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata.
 1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
Tartalom. Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás
 Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Bevezetés az állapottér elméletbe: Állapottér reprezentációk
 Tartalom Bevezetés az állapottér elméletbe: Állapottér reprezentációk vizsgálata 1. Példa az állapottér reprezentációk megválasztására 2. Átviteli függvény és állapottér reprezentációk közötti kapcsolatok
Tartalom Bevezetés az állapottér elméletbe: Állapottér reprezentációk vizsgálata 1. Példa az állapottér reprezentációk megválasztására 2. Átviteli függvény és állapottér reprezentációk közötti kapcsolatok
Dr. Gyurcsek István. Példafeladatok. Helygörbék Bode-diagramok HELYGÖRBÉK, BODE-DIAGRAMOK DR. GYURCSEK ISTVÁN
 Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Márkus Zsolt Tulajdonságok, jelleggörbék, stb BMF -
 Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Irányítástechnika. II. rész. Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu
 Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
4. Laplace transzformáció és alkalmazása
 4. Laplace transzformáció és alkalmazása 4.1. Laplace transzformált és tulajdonságai Differenciálegyenletek egy csoportja algebrai egyenletté alakítható. Ennek egyik eszköze a Laplace transzformáció. Definíció:
4. Laplace transzformáció és alkalmazása 4.1. Laplace transzformált és tulajdonságai Differenciálegyenletek egy csoportja algebrai egyenletté alakítható. Ennek egyik eszköze a Laplace transzformáció. Definíció:
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN. 2003.11.06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1
 DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN 2003..06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet Egy bemenetű, egy kimenetű rendszer u(t) diff. egyenlet v(t) zárt alakban n-edrendű diff. egyenlet
DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN 2003..06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet Egy bemenetű, egy kimenetű rendszer u(t) diff. egyenlet v(t) zárt alakban n-edrendű diff. egyenlet
Mechatronika II (BMEGEFOAMM2)
") Mechatronika II (BMEGEFOAMM2) Első gyakorlat Készítette: Raj Levente Tartalom Bevezetés... 3 Jelölések... 3 101 Egységugrás bemenetre adott válaszfüggvény (időfüggvény) meghatározása... 4 Feladatleírás...
Mechatronika II (BMEGEFOAMM2) Első gyakorlat Készítette: Raj Levente Tartalom Bevezetés... 3 Jelölések... 3 101 Egységugrás bemenetre adott válaszfüggvény (időfüggvény) meghatározása... 4 Feladatleírás...
FIR és IIR szűrők tervezése digitális jelfeldolgozás területén
 Dr. Szabó Anita FIR és IIR szűrők tervezése digitális jelfeldolgozás területén A Szabadkai Műszaki Szakfőiskola oktatójaként kutatásaimat a digitális jelfeldolgozás területén folytatom, ezen belül a fő
Dr. Szabó Anita FIR és IIR szűrők tervezése digitális jelfeldolgozás területén A Szabadkai Műszaki Szakfőiskola oktatójaként kutatásaimat a digitális jelfeldolgozás területén folytatom, ezen belül a fő
Számítógép-vezérelt szabályozás- és irányításelmélet
 Számítógép-vezérelt szabályozás- és irányításelmélet 2. gyakorlat Feladattípusok két függvény konvolúciója ÿ + aẏ + by = e at, y(), ẏ() típusú kezdetiérték feladatok megoldása (Laplace transzformációval)
Számítógép-vezérelt szabályozás- és irányításelmélet 2. gyakorlat Feladattípusok két függvény konvolúciója ÿ + aẏ + by = e at, y(), ẏ() típusú kezdetiérték feladatok megoldása (Laplace transzformációval)
"Flat" rendszerek. definíciók, példák, alkalmazások
 "Flat" rendszerek definíciók, példák, alkalmazások Hangos Katalin, Szederkényi Gábor szeder@scl.sztaki.hu, hangos@scl.sztaki.hu 2006. október 18. flatness - p. 1/26 FLAT RENDSZEREK: Elméleti alapok 2006.
"Flat" rendszerek definíciók, példák, alkalmazások Hangos Katalin, Szederkényi Gábor szeder@scl.sztaki.hu, hangos@scl.sztaki.hu 2006. október 18. flatness - p. 1/26 FLAT RENDSZEREK: Elméleti alapok 2006.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
Ipari kemencék PID irányítása
 Ipari kemencék PID irányítása 1. A gyakorlat célja: Az ellenállással melegített ipari kemencék modelljének meghatározása. A Opelt PID tervezési módszer alkalmazása ipari kemencék irányítására. Az ipari
Ipari kemencék PID irányítása 1. A gyakorlat célja: Az ellenállással melegített ipari kemencék modelljének meghatározása. A Opelt PID tervezési módszer alkalmazása ipari kemencék irányítására. Az ipari
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Konjugált gradiens módszer
 Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Differenciálegyenletek numerikus integrálása április 9.
 Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Feladatok az 5. hétre. Eredményekkel és teljesen kidolgozott megoldásokkal az 1,2,3.(a),(b),(c), 6.(a) feladatokra
,(b),(c), 6.(a) feladatokra") Feladatok az 5. hétre. Eredményekkel és teljesen kidolgozott megoldásokkal az 1,,3.(a),(b),(), 6.(a) feladatokra 1. Oldjuk meg a következő kezdeti érték feladatot: y 1 =, y(0) = 3, 1 x y (0) = 1. Ha egy
Feladatok az 5. hétre. Eredményekkel és teljesen kidolgozott megoldásokkal az 1,,3.(a),(b),(), 6.(a) feladatokra 1. Oldjuk meg a következő kezdeti érték feladatot: y 1 =, y(0) = 3, 1 x y (0) = 1. Ha egy
Mechatronika segédlet 10. gyakorlat
 Mechatronika segédlet 10. gyakorlat 2017. április 21. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 1 simrobot... 2 Paraméterei... 2 Visszatérési értéke... 2 Kód... 2 simrobotmdl... 3 robotsen.mdl...
Mechatronika segédlet 10. gyakorlat 2017. április 21. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 1 simrobot... 2 Paraméterei... 2 Visszatérési értéke... 2 Kód... 2 simrobotmdl... 3 robotsen.mdl...
Logaritmikus erősítő tanulmányozása
 13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
13. fejezet A műveleti erősítők Logaritmikus erősítő tanulmányozása A műveleti erősítő olyan elektronikus áramkör, amely a két bemenete közötti potenciálkülönbséget igen nagy mértékben fölerősíti. A műveleti
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ODE SOLVER-ek használata a MATLAB-ban
 ODE SOLVER-ek használata a MATLAB-ban Mi az az ODE? ordinary differential equation Milyen ODE megoldók vannak a MATLAB-ban? ode45, ode23, ode113, ode15s, ode23s, ode23t, ode23tb, stb. A részletes leírásuk
ODE SOLVER-ek használata a MATLAB-ban Mi az az ODE? ordinary differential equation Milyen ODE megoldók vannak a MATLAB-ban? ode45, ode23, ode113, ode15s, ode23s, ode23t, ode23tb, stb. A részletes leírásuk
Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait.
 Közönséges differenciálegyenletek Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait. Célunk a függvény meghatározása Egyetlen független
Közönséges differenciálegyenletek Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait. Célunk a függvény meghatározása Egyetlen független
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9.
 9.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Villamosságtan szigorlati tételek
 Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel.
 25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel. A gerjesztı jelek hálózatba történı be- vagy kikapcsolása után átmeneti (tranziens) jelenség játszódik le. Az állandósult (stacionárius)
25/1. Stacionárius és tranziens megoldás. Kezdeti és végérték tétel. A gerjesztı jelek hálózatba történı be- vagy kikapcsolása után átmeneti (tranziens) jelenség játszódik le. Az állandósult (stacionárius)
Az egységugrás függvény a 0 időpillanatot követően 10 nagyságú jelet ad, valamint K=2. Vizsgáljuk meg a kimenetet:
 II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
Differenciálegyenletek numerikus megoldása
 a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
= Φ B(t = t) Φ B (t = 0) t
 Φ B (t = 0) t") 4. Gyakorlat 32B-3 Egy ellenállású, r sugarú köralakú huzalhurok a B homogén mágneses erőtér irányára merőleges felületen fekszik. A hurkot gyorsan, t idő alatt 180 o -kal átforditjuk. Számitsuk ki, hogy
4. Gyakorlat 32B-3 Egy ellenállású, r sugarú köralakú huzalhurok a B homogén mágneses erőtér irányára merőleges felületen fekszik. A hurkot gyorsan, t idő alatt 180 o -kal átforditjuk. Számitsuk ki, hogy
Szabályozás Irányítástechnika PE MIK MI BSc 1
 Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
1. Feladat. 1. ábra. Megoldás
 . Feladat Az. ábrán látható egyenáramú áramkörben, kezdetben mindkét kapcsoló nyitott állásba található. A0 pillanatban zárjuk a kapcsolót, majd megvárjuk, hogy a létrejövő tranziens folyamat során a kondenzátor
. Feladat Az. ábrán látható egyenáramú áramkörben, kezdetben mindkét kapcsoló nyitott állásba található. A0 pillanatban zárjuk a kapcsolót, majd megvárjuk, hogy a létrejövő tranziens folyamat során a kondenzátor
Irányításelmélet és technika I.
 Irányításelmélet és technika I Folytonos idejű rendszerek leírása az állapottérben Állapotvisszacsatolást alkalmazó szabályozási körök Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki
Irányításelmélet és technika I Folytonos idejű rendszerek leírása az állapottérben Állapotvisszacsatolást alkalmazó szabályozási körök Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki
Határozatlan integrál (2) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Határozatlan integrál () First Prev Next Last Go Back Full Screen Close Quit 1. Az összetett függvények integrálására szolgáló egyik módszer a helyettesítéssel való integrálás. Az idevonatkozó tétel pontos
Határozatlan integrál () First Prev Next Last Go Back Full Screen Close Quit 1. Az összetett függvények integrálására szolgáló egyik módszer a helyettesítéssel való integrálás. Az idevonatkozó tétel pontos
Dinamikus modellek szerkezete, SDG modellek
 Diagnosztika - 3. p. 1/2 Modell Alapú Diagnosztika Diszkrét Módszerekkel Dinamikus modellek szerkezete, SDG modellek Hangos Katalin PE Villamosmérnöki és Információs Rendszerek Tanszék Diagnosztika - 3.
Diagnosztika - 3. p. 1/2 Modell Alapú Diagnosztika Diszkrét Módszerekkel Dinamikus modellek szerkezete, SDG modellek Hangos Katalin PE Villamosmérnöki és Információs Rendszerek Tanszék Diagnosztika - 3.
1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1
![1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1](/thumbs/88/116339870.jpg "1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1") numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
A nullád rendű tartóáramkör átviteli függvényének alakulása, ha a tartási időszakban a lezárás nem veszteségmentes
 A nullád rendű tartóáramkör átviteli függvényének alakulása, ha a tartási időszakban a lezárás nem veszteségmentes VÖRÖS ANDRÁS Műszeripari Kutatóintézet Az alábbiakban vizsgálat tárgyává tesszük azt az
A nullád rendű tartóáramkör átviteli függvényének alakulása, ha a tartási időszakban a lezárás nem veszteségmentes VÖRÖS ANDRÁS Műszeripari Kutatóintézet Az alábbiakban vizsgálat tárgyává tesszük azt az
ÁGAZATI SZAKMAI ÉRETTSÉGI VIZSGA VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK
 VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
Jelgenerátorok ELEKTRONIKA_2
 Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Jelgenerátorok ELEKTRONIKA_2 TEMATIKA Jelgenerátorok osztályozása. Túlvezérelt erősítők. Feszültségkomparátorok. Visszacsatolt komparátorok. Multivibrátor. Pozitív visszacsatolás. Oszcillátorok. RC oszcillátorok.
Tétel: A háromszög belső szögeinek összege: 180
 Tétel: A háromszög belső szögeinek összege: 180 Bizonyítás: legyenek az ABC háromszög belső szögei α, β, γ. Húzzunk a C csúcson át párhuzamost AB-vel. A C csúcsnál keletkezett egyenesszöget a háromszög
Tétel: A háromszög belső szögeinek összege: 180 Bizonyítás: legyenek az ABC háromszög belső szögei α, β, γ. Húzzunk a C csúcson át párhuzamost AB-vel. A C csúcsnál keletkezett egyenesszöget a háromszög
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN. 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1
 DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 3. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 3. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Jelek és rendszerek Gyakorlat_02. A gyakorlat célja megismerkedni a MATLAB Simulink mőködésével, filozófiájával.
 A gyakorlat célja megismerkedni a MATLAB Simulink mőködésével, filozófiájával. A Szimulink programcsomag rendszerek analóg számítógépes modelljének szimulálására alkalmas grafikus programcsomag. Egy SIMULINK
A gyakorlat célja megismerkedni a MATLAB Simulink mőködésével, filozófiájával. A Szimulink programcsomag rendszerek analóg számítógépes modelljének szimulálására alkalmas grafikus programcsomag. Egy SIMULINK
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
azonos sikban fekszik. A vezetőhurok ellenállása 2 Ω. Számítsuk ki a hurok teljes 4.1. ábra ábra
 4. Gyakorlat 31B-9 A 31-15 ábrán látható, téglalap alakú vezetőhurok és a hosszúságú, egyenes vezető azonos sikban fekszik. A vezetőhurok ellenállása 2 Ω. Számítsuk ki a hurok teljes 4.1. ábra. 31-15 ábra
4. Gyakorlat 31B-9 A 31-15 ábrán látható, téglalap alakú vezetőhurok és a hosszúságú, egyenes vezető azonos sikban fekszik. A vezetőhurok ellenállása 2 Ω. Számítsuk ki a hurok teljes 4.1. ábra. 31-15 ábra
Irányítástechnika labor Elméleti összefoglaló
 Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Műveleti erősítők. 1. Felépítése. a. Rajzjele. b. Belső felépítés (tömbvázlat) c. Differenciálerősítő
 c. Differenciálerősítő") Műveleti erősítők A műveleti erősítők egyenáramú erősítőfokozatokból felépített, sokoldalúan felhasználható áramkörök, amelyek jellemzőit A u ', R be ', stb. külső elemek csatlakoztatásával széles határok
Műveleti erősítők A műveleti erősítők egyenáramú erősítőfokozatokból felépített, sokoldalúan felhasználható áramkörök, amelyek jellemzőit A u ', R be ', stb. külső elemek csatlakoztatásával széles határok
1. A mérés tárgya: Mechatronika, Optika és Gépészeti Informatika Tanszék D524. Műveleti erősítők alkalmazása
 Mechatronika, Optika és Gépészeti Informatika Tanszék M7 A mérés célja: A mérés során felhasznált eszközök: A mérés során elvégzendő feladatok: 1. A mérés tárgya: Műveleti erősítők alkalmazása D524 Analóg
Mechatronika, Optika és Gépészeti Informatika Tanszék M7 A mérés célja: A mérés során felhasznált eszközök: A mérés során elvégzendő feladatok: 1. A mérés tárgya: Műveleti erősítők alkalmazása D524 Analóg
Elektronika zöldfülűeknek
 Ha hibát találsz, jelezd itt: Elektronika zöldfülűeknek R I = 0 Szakadás, olyan mintha kiradíroznánk az ellenállást vezetékekkel együtt. A feszültség nem feltétlen ugyanakkora a két oldalon. Üresjárat,
Ha hibát találsz, jelezd itt: Elektronika zöldfülűeknek R I = 0 Szakadás, olyan mintha kiradíroznánk az ellenállást vezetékekkel együtt. A feszültség nem feltétlen ugyanakkora a két oldalon. Üresjárat,
Utolsó el adás. Wettl Ferenc BME Algebra Tanszék, Wettl Ferenc (BME) Utolsó el adás / 20
 Utolsó el adás / 20") Utolsó el adás Wettl Ferenc BME Algebra Tanszék, http://www.math.bme.hu/~wettl 2013-12-09 Wettl Ferenc (BME) Utolsó el adás 2013-12-09 1 / 20 1 Dierenciálegyenletek megoldhatóságának elmélete 2 Parciális
Utolsó el adás Wettl Ferenc BME Algebra Tanszék, http://www.math.bme.hu/~wettl 2013-12-09 Wettl Ferenc (BME) Utolsó el adás 2013-12-09 1 / 20 1 Dierenciálegyenletek megoldhatóságának elmélete 2 Parciális
valós számot tartalmaz, mert az ilyen részhalmazon nem azonosság.
 2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
2. Közönséges differenciálegyenlet megoldása, megoldhatósága Definíció: Az y függvényt a valós számok H halmazán a közönséges differenciálegyenlet megoldásának nevezzük, ha az y = y(x) helyettesítést elvégezve
Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata
 Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata 2017.03.02. A legalapvetőbb áramkörök ellenállásokat, kondenzátorokat és indukciós tekercseket tartalmazó áramkörök. A fenti elemekből
Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata 2017.03.02. A legalapvetőbb áramkörök ellenállásokat, kondenzátorokat és indukciós tekercseket tartalmazó áramkörök. A fenti elemekből
Egyenletek, egyenlőtlenségek VII.
 Egyenletek, egyenlőtlenségek VII. Magasabbfokú egyenletek: A 3, vagy annál nagyobb fokú egyenleteket magasabb fokú egyenleteknek nevezzük. Megjegyzés: Egy n - ed fokú egyenletnek legfeljebb n darab valós
Egyenletek, egyenlőtlenségek VII. Magasabbfokú egyenletek: A 3, vagy annál nagyobb fokú egyenleteket magasabb fokú egyenleteknek nevezzük. Megjegyzés: Egy n - ed fokú egyenletnek legfeljebb n darab valós
Megoldott feladatok november 30. n+3 szigorúan monoton csökken, 5. n+3. lim a n = lim. n+3 = 2n+3 n+4 2n+1
 Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Bevezető fizika (infó), 8. feladatsor Egyenáram, egyenáramú áramkörök 2.
, 8. feladatsor Egyenáram, egyenáramú áramkörök 2.") evezető fizika (infó), 8 feladatsor Egyenáram, egyenáramú áramkörök 04 november, 3:9 mai órához szükséges elméleti anyag: Kirchhoff törvényei: I Minden csomópontban a befolyó és kifolyó áramok előjeles
evezető fizika (infó), 8 feladatsor Egyenáram, egyenáramú áramkörök 04 november, 3:9 mai órához szükséges elméleti anyag: Kirchhoff törvényei: I Minden csomópontban a befolyó és kifolyó áramok előjeles
9. Trigonometria. I. Nulladik ZH-ban láttuk: 1. Tegye nagyság szerint növekvő sorrendbe az alábbi értékeket! Megoldás:
 9. Trigonometria I. Nulladik ZH-ban láttuk: 1. Tegye nagyság szerint növekvő sorrendbe az alábbi értékeket! x = cos 150 ; y = sin 5 ; z = tg ( 60 ) (A) z < x < y (B) x < y < z (C) y < x < z (D) z < y
9. Trigonometria I. Nulladik ZH-ban láttuk: 1. Tegye nagyság szerint növekvő sorrendbe az alábbi értékeket! x = cos 150 ; y = sin 5 ; z = tg ( 60 ) (A) z < x < y (B) x < y < z (C) y < x < z (D) z < y
Lineáris algebra numerikus módszerei
 Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Számítógépes gyakorlat Irányítási rendszerek szintézise
 Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
First Prev Next Last Go Back Full Screen Close Quit. Matematika I
 Matematika I (Analízis) Készítette: Horváth Gábor Kötelező irodalom: Ács László, Gáspár Csaba: Analízis 1 Oktatási segédanyagok és a tantárgyi követelményrendszer megtalálható a http://rs1.szif.hu/ horvathg/horvathg.html
Matematika I (Analízis) Készítette: Horváth Gábor Kötelező irodalom: Ács László, Gáspár Csaba: Analízis 1 Oktatási segédanyagok és a tantárgyi követelményrendszer megtalálható a http://rs1.szif.hu/ horvathg/horvathg.html
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 02 Elektronikai technikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 02 Elektronikai technikus
2.Előadás ( ) Munkapont és kivezérelhetőség
 Munkapont és kivezérelhetőség") 2.lőadás (207.09.2.) Munkapont és kivezérelhetőség A tranzisztorokat (BJT) lineáris áramkörbe ágyazva "működtetjük" és a továbbiakban mindig követelmény, hogy a tranzisztor normál aktív tartományban működjön
2.lőadás (207.09.2.) Munkapont és kivezérelhetőség A tranzisztorokat (BJT) lineáris áramkörbe ágyazva "működtetjük" és a továbbiakban mindig követelmény, hogy a tranzisztor normál aktív tartományban működjön
ACS-1000 Ipari analóg szabályozó rendszer
 ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
ACS is an acronym for Analog Control System ; a laboratory teaching system with analog control courses Az 17 különböző dugaszolható modulból és az ACS-18001 DC szervó motor & szabályozó egységből áll.
10.1. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
Történeti Áttekintés
 Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Mechatronika alapjai órai jegyzet
 - 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
- 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
ANALÓG ÉS DIGITÁLIS TECHNIKA I
 ANALÓG ÉS DIGITÁLIS TECHNIKA I Dr. Lovassy Rita lovassy.rita@kvk.uni-obuda.hu Óbudai Egyetem KVK Mikroelektronikai és Technológia Intézet 2. ELŐADÁS 2010/2011 tanév 2. félév 1 Aktív szűrőkapcsolások A
ANALÓG ÉS DIGITÁLIS TECHNIKA I Dr. Lovassy Rita lovassy.rita@kvk.uni-obuda.hu Óbudai Egyetem KVK Mikroelektronikai és Technológia Intézet 2. ELŐADÁS 2010/2011 tanév 2. félév 1 Aktív szűrőkapcsolások A
Az éjszakai rovarok repüléséről
 Erről ezt olvashatjuk [ ] - ben: Az éjszakai rovarok repüléséről Az a kijelentés, miszerint a repülés pályája logaritmikus spirális, a következőképpen igazolható [ 2 ].. ábra Az állandó v nagyságú sebességgel
Erről ezt olvashatjuk [ ] - ben: Az éjszakai rovarok repüléséről Az a kijelentés, miszerint a repülés pályája logaritmikus spirális, a következőképpen igazolható [ 2 ].. ábra Az állandó v nagyságú sebességgel
Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata
 Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata 2017.09.18. A legalapvetőbb áramkörök ellenállásokat, kondenzátorokat és indukciós tekercseket tartalmazó áramkörök. A fenti elemekből
Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata 2017.09.18. A legalapvetőbb áramkörök ellenállásokat, kondenzátorokat és indukciós tekercseket tartalmazó áramkörök. A fenti elemekből
KÖZÖS EMITTERŰ FOKOZAT BÁZISOSZTÓS MUNKAPONTBEÁLLÍTÁSA
 KÖZÖS EMITTERŰ FOKOZT BÁZISOSZTÓS MUNKPONTBEÁLLÍTÁS Mint ismeretes, a tranzisztor bázis-emitter diódájának jelentős a hőfokfüggése. Ugyanis a hőmérséklet növekedése a félvezetőkben megnöveli a töltéshordozók
KÖZÖS EMITTERŰ FOKOZT BÁZISOSZTÓS MUNKPONTBEÁLLÍTÁS Mint ismeretes, a tranzisztor bázis-emitter diódájának jelentős a hőfokfüggése. Ugyanis a hőmérséklet növekedése a félvezetőkben megnöveli a töltéshordozók
Irányítástechnika II. előadásvázlat
 Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Alaptagok Nyquist- és Bode-diagramjai
 C Alaptagok Nyquist- és Bode-diagramjai C.1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik módja az átviteli függvények segítségével történik. Az átviteli függvényeket
C Alaptagok Nyquist- és Bode-diagramjai C.1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik módja az átviteli függvények segítségével történik. Az átviteli függvényeket
Jelek és rendszerek 1. 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék
 Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata
 Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata A legalapvetőbb áramkörök ellenállásokat, kondenzátorokat és indukciós tekercseket tartalmazó áramkörök. A fenti elemekből álló hálózatok
Elektronika II laboratórium 1. mérés: R L C négypólusok vizsgálata A legalapvetőbb áramkörök ellenállásokat, kondenzátorokat és indukciós tekercseket tartalmazó áramkörök. A fenti elemekből álló hálózatok
Közönséges differenciálegyenletek megoldása Mapleben
 Közönséges differenciálegyenletek megoldása Mapleben Differenciálegyenlet alatt egy olyan egyenletet értünk, amelyben a meghatározandó ismeretlen egy függvény, és az egyenlet tartalmazza az ismeretlen
Közönséges differenciálegyenletek megoldása Mapleben Differenciálegyenlet alatt egy olyan egyenletet értünk, amelyben a meghatározandó ismeretlen egy függvény, és az egyenlet tartalmazza az ismeretlen
1 kérdés. Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt május 13. szombat Teszt feladatok 2017 Előzetes megtekintés
 Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
Személyes kezdőlap Villamos Gelencsér Géza Simonyi teszt 2017. május 13. szombat Teszt feladatok 2017 Előzetes megtekintés Kezdés ideje 2017. május 9., kedd, 16:54 Állapot Befejezte Befejezés dátuma 2017.
07. mérés Erősítő kapcsolások vizsgálata.
 07. mérés Erősítő kapcsolások vizsgálata. A leggyakrabban használt üzemi paraméterek a következők: - a feszültségerősítés Au - az áramerősítés Ai - a teljesítményerősítés Ap - a bemeneti impedancia Rbe
07. mérés Erősítő kapcsolások vizsgálata. A leggyakrabban használt üzemi paraméterek a következők: - a feszültségerősítés Au - az áramerősítés Ai - a teljesítményerősítés Ap - a bemeneti impedancia Rbe
milyen mennyiségeket jelölnek a Bode diagram tengelyei? csoportosítsa a determinisztikus jeleket!
 A 2011-es ZH kérdései emlékezetből, majd közösen kidolgozva. Lehet benne rossz, de elég sokan szerkesztettük egyszerre, szóval feltehetően a nagyja helyes. milyen mennyiségeket jelölnek a Bode diagram
A 2011-es ZH kérdései emlékezetből, majd közösen kidolgozva. Lehet benne rossz, de elég sokan szerkesztettük egyszerre, szóval feltehetően a nagyja helyes. milyen mennyiségeket jelölnek a Bode diagram
Földelt emitteres erősítő DC, AC analízise
 Földelt emitteres erősítő DC, AC analízise Kapcsolási vázlat: Az ábrán egy kisjelű univerzális felhasználású tranzisztor (tip: 2N3904) köré van felépítve egy egyszerű, pár alkatrészből álló erősítő áramkör.
Földelt emitteres erősítő DC, AC analízise Kapcsolási vázlat: Az ábrán egy kisjelű univerzális felhasználású tranzisztor (tip: 2N3904) köré van felépítve egy egyszerű, pár alkatrészből álló erősítő áramkör.
Differenciálegyenletek megoldása próbafüggvény-módszerrel
 Differenciálegyenletek megoldása próbafüggvény-módszerrel Ez még nem a végleges változat, utoljára módosítva: 2012. április 9.19:38. Elsőrendű egyenletek Legyen adott egy elsőrendű lineáris állandó együtthatós
Differenciálegyenletek megoldása próbafüggvény-módszerrel Ez még nem a végleges változat, utoljára módosítva: 2012. április 9.19:38. Elsőrendű egyenletek Legyen adott egy elsőrendű lineáris állandó együtthatós
(1 + (y ) 2 = f(x). Határozzuk meg a rúd alakját, ha a nyomaték eloszlás. (y ) 2 + 2yy = 0,
 2 = f(x). Határozzuk meg a rúd alakját, ha a nyomaték eloszlás. (y ) 2 + 2yy = 0,") Feladatok az 5. hétre. Eredményekkel és kidolgozott megoldásokkal. Oldjuk meg az alábbi másodrend lineáris homogén d.e. - et, tudva, hogy egy megoldása az y = x! x y xy + y = 0.. Oldjuk meg a következ
Feladatok az 5. hétre. Eredményekkel és kidolgozott megoldásokkal. Oldjuk meg az alábbi másodrend lineáris homogén d.e. - et, tudva, hogy egy megoldása az y = x! x y xy + y = 0.. Oldjuk meg a következ
Ideális műveleti erősítő
 Ideális műveleti erősítő Az műveleti erősítő célja, hogy alap építőeleméül szolgáljon analóg matematikai műveleteket végrehajtó áramköröknek. Az ideális műveleti erősítő egy gyakorlatban nem létező áramköri
Ideális műveleti erősítő Az műveleti erősítő célja, hogy alap építőeleméül szolgáljon analóg matematikai műveleteket végrehajtó áramköröknek. Az ideális műveleti erősítő egy gyakorlatban nem létező áramköri
Tartalom. 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció)
") Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Passzív és aktív aluláteresztő szűrők
 7. Laboratóriumi gyakorlat Passzív és aktív aluláteresztő szűrők. A gyakorlat célja: A Micro-Cap és Filterlab programok segítségével tanulmányozzuk a passzív és aktív aluláteresztő szűrők elépítését, jelátvitelét.
7. Laboratóriumi gyakorlat Passzív és aktív aluláteresztő szűrők. A gyakorlat célja: A Micro-Cap és Filterlab programok segítségével tanulmányozzuk a passzív és aktív aluláteresztő szűrők elépítését, jelátvitelét.
Jelek és rendszerek - 4.előadás
 Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Egyenletek, egyenlőtlenségek X.
 Egyenletek, egyenlőtlenségek X. DEFINÍCIÓ: (Logaritmus) Ha egy pozitív valós számot adott, 1 - től különböző pozitív alapú hatvány alakban írunk fel, akkor ennek a hatványnak a kitevőjét logaritmusnak
Egyenletek, egyenlőtlenségek X. DEFINÍCIÓ: (Logaritmus) Ha egy pozitív valós számot adott, 1 - től különböző pozitív alapú hatvány alakban írunk fel, akkor ennek a hatványnak a kitevőjét logaritmusnak
Mûveleti erõsítõk I.
 Mûveleti erõsítõk I. 0. Bevezetés - a mûveleti erõsítõk mûködése A következõ mérésben az univerzális analóg erõsítõelem, az un. "mûveleti erõsítõ" mûködésének alapvetõ ismereteit sajátíthatjuk el. A nyílthurkú
Mûveleti erõsítõk I. 0. Bevezetés - a mûveleti erõsítõk mûködése A következõ mérésben az univerzális analóg erõsítõelem, az un. "mûveleti erõsítõ" mûködésének alapvetõ ismereteit sajátíthatjuk el. A nyílthurkú
Reichardt András okt. 13 nov. 8.
 Példák és feladatok a Hálózatok és rendszerek analízise 2. tárgyhoz Reichardt András 2003. okt. 3 nov. 8. . fejezet Komplex frekvenciatartománybeli analízis Az alábbiakban a komplex frekvenciatartományban
Példák és feladatok a Hálózatok és rendszerek analízise 2. tárgyhoz Reichardt András 2003. okt. 3 nov. 8. . fejezet Komplex frekvenciatartománybeli analízis Az alábbiakban a komplex frekvenciatartományban
FIZIKA II. Egyenáram. Dr. Seres István
 Dr. Seres István Áramerősség, Ohm törvény Áramerősség: I Q t Ohm törvény: U I Egyenfeszültség állandó áram?! fft.szie.hu 2 Seres.Istvan@gek.szie.hu Áramerősség, Ohm törvény Egyenfeszültség U állandó Elektromos
Dr. Seres István Áramerősség, Ohm törvény Áramerősség: I Q t Ohm törvény: U I Egyenfeszültség állandó áram?! fft.szie.hu 2 Seres.Istvan@gek.szie.hu Áramerősség, Ohm törvény Egyenfeszültség U állandó Elektromos
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék DARU IRÁNYÍTÁSA
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék DARU IRÁNYÍTÁSA Önálló laboratórium beszámoló Készítette: Menyhárt Balázs BDVUD4
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék DARU IRÁNYÍTÁSA Önálló laboratórium beszámoló Készítette: Menyhárt Balázs BDVUD4
EGYENÁRAMÚ TÁPEGYSÉGEK
 dátum:... a mérést végezte:... EGYENÁRAMÚ TÁPEGYSÉGEK m é r é s i j e g y z k ö n y v 1/A. Mérje meg az adott hálózati szabályozható (toroid) transzformátor szekunder tekercsének minimálisan és maximálisan
dátum:... a mérést végezte:... EGYENÁRAMÚ TÁPEGYSÉGEK m é r é s i j e g y z k ö n y v 1/A. Mérje meg az adott hálózati szabályozható (toroid) transzformátor szekunder tekercsének minimálisan és maximálisan