Tartalom. Geometria közvetlen tárolása. Geometria tárolása - brute force. Valasek Gábor valasek@inf.elte.hu. Hermite interpoláció. Subdivision görbék
|
|
|
- Brigitta Borbála Budainé
- 9 évvel ezelőtt
- Látták:
Átírás
1 Tartalom Számítógépes Grafika Valasek Gábor Eötvös Loránd Tudományegyetem Informatikai Kar 2015/2016. őszi félév Geometria és topológia tárolása Geometria tárolása Topológia tárolása Szárnyas-él adatszerkezet Fél-él adatszerkezet Görbék reprezentációja Lineáris interpoláció Polinomiális görbék hatványbázisban Hermite interpoláció Bézier görbék és spline-ok Subdivision görbék Geometria közvetlen tárolása Geometria tárolása - brute force A mai modern grafikus API-k pont, szakasz és háromszög primitíveket használnak Ebben a pontban megnézzük, hogy milyen módon tárolhatóak el ezek hatékonyan Továbbá azt is, hogy miképp tudunk szomszédossági információkat is kinyerni Általánosabban nézve, legyenek a primitíveink síkbeli poligonok, amiket csúcspontjaik felsorolásával reprezentálunk (valamilyen rögzített bejárási irány szerint) Poligonokkal kapcsolatos feladatok: tárolás transzformálás szomszédossági lekérdezések

2 Geometria brute force tárolása A brute force tárolás elemzése s t r u c t t r i a n g l e { f l o a t x1, y1, z1 ; f l o a t x2, y2, z2 ; f l o a t x3, y3, z3 ; } ; Tárolás: ha vannak poligonoknak közös csúcsai, akkor ezeket többször tároljuk feleslegesen nem túl jó Transzformálás: a közös csúcsokra annyiszor fogjuk elvégezni a transzformációkat, ahányszor szerepelnek nem hatékony Lekérdezések: fogalmunk sincs, ki kinek a szomszédja, csak az összes csúcs bejárásával tudunk eredményre jutni katasztrófa Egyetlen előnye, hogy ennél egyszerűbben már nem is lehetne tárolni Index pufferek Index puffer-ek Alapötlet: tároljunk minden csúcsot egyszer, egy nagy közös tömbben! A poligonok csak hivatkozzanak a csúcsok tömbjének elemeire. Ez az index puffer. Minden GPU támogatja. s t r u c t t r i a n g l e { unsigned i n t a, b, c ; } ; s t r u c t vec3 { f l o a t x, y, z ; } ; std : : vector <vec3> v e r t e x B u f f e r ; std : : vector <i n t > i n d e x B u f f e r ;


3 Index puffer Index puffer Index puffer Index puffer

 (N + 1) = N 2 + 2N + 1 csúcs (+ 4N 2 egész szám, index) Mikor éri meg? Azaz hogyan viszonyul egymáshoz 4N 2 és N 2 + 2N + 1?")
4 Index puffer Index puffer Példa Példa folyt. Vegyünk egy N N db négyzetből álló rácsot! Mennyi adatot kell eltárolnunk ehhez? Mérete index puffer nélkül: 4 csúcs/négyzet, N N négyzet: 4N 2 csúcspont. Mérete index puffer-rel: (N + 1) (N + 1) = N 2 + 2N + 1 csúcs (+ 4N 2 egész szám, index) Mikor éri meg? Azaz hogyan viszonyul egymáshoz 4N 2 és N 2 + 2N + 1? 4N 2 >N 2 + 2N > 3N 2 + 2N + 1 N >1, ha N Z + Ha több mint egyetlen négyzetünk van, már megéri! Pl. ha N = 10 Mérete index puffer nélkül: 400 csúcsot tárolunk és transzformálunk Mérete index puffer-rel: 121 csúcsot tárolunk és transzformálunk

 nem csak pozicókat tartalmaz, hanem normálvektorokat, textúra-koordinátákat, és még sok mást. Egy hivatkozás a vertex buffer-ra mindezekre együtt hivatkozik.")
5 Index puffer-ek GPU-n Kocka probléma Minden videókártya, amit még nem gyűjtenek a múzeumok (idézet 2010-ből) támogatja az index puffer-eket. A csúcspontok tömbje (vertex buffer) nem csak pozicókat tartalmaz, hanem normálvektorokat, textúra-koordinátákat, és még sok mást. Egy hivatkozás a vertex buffer-ra mindezekre együtt hivatkozik. Figyeljünk: az index puffer csak akkor tud segíteni, ha bár különböző háromszögeknél használjuk fel ugyanazt a csúcsot, de mindegyik háromszög ugyanannak a felületnek a közelítése! Ha egy kockát rakunk össze háromszögekből, akkor egy sarokban lévő csúcs min. három, max. hat háromszögnek a csúcsa de minden egyes csúcspont három különböző felület (az ott összeérő három lap) pontja Tehát bár index puffer-rel elég lenne csak 8 csúcsot nyilvántartani, amint megvilágítunk és felületi normálisokra lesz szükségünk baj lesz! Kocka probléma Kocka probléma A probléma: bár egyetlen térbeli pontot jelöl egy sarok, valójában három különböző felület felületi pontja Mivel a csúcspontokban pozíciókon kívül felületi tulajdonságokat is tárolunk (normális), ezért ilyenkor még index pufferrel sem spórolhatjuk ki a térbeli redundanciát! Oldalanként külön meg kell adni a csúcsokat, ugyanolyan pozíció, de a három oldalnak megfelelően három különböző normális segítségével: összesen tehát 3 8 csúcs kerül az vertex buffer-ba

6 Az index pufferes tárolás elemzése Szomszédsági viszonyok Tárolás: ált. hatékony. Transzformálás: hatékony. Lekérdezések: közös csúcsokat már tudunk, de igazából még mindig fogalmunk sincs. Néha kellenek a szomszédok, pl. felület-felosztásoknál, degenerált primitívek kiszűrésekor, egyes felhasználói inputok kezelésekor stb. Ismertek a csúcsok számítható mi, minek a szomszédja! Egy csúcsban tetszőleges számú poligon találkozhat dinamikus adatszerkezet kéne Jobb megoldás: Szárnyas-él (winged-edge) adatszerkezet! Szárnyas-él adatszerkezet Szárnyas-él adatszerkezet Az alakzatokat határukkal leíró (B-rep) (boundary representation) reprezentáció egyik gyakran használt topológiatároló adatszerkezete manifold poliéderek esetén Tárolás során csúcsokat, éleket és lapokat különböztet meg Az élek szempontjából tároljuk a felületet Minden élhez fix számú adat tartozik Segítségével pl. gyorsan körbe lehet járni egy poligon éleit, közben megkapva minden szomszédot Minden lapot egy élsorozat határol - minden laphoz tároljunk egy, az élsorozatához tartozó tetszőleges élre mutató pointert A csúcspontok élekhez illeszkednek (vagy belőle indul ki, vagy ő a célja) - tároljuk valamelyiket a csúcsokhoz!
 (boundary representation) reprezentáció egyik gyakran használt topológiatároló adatszerkezete manifold")
7 Egyetlen él adatai Egyetlen él adatai Egy él két csúcsot köt össze - tároljuk ezeket az élben Egy él legfeljebb két laphoz tartozhat - az egyik a baloldali, a másik a jobboldali lap lesz, ezekre mutató pointereket (vagy indexeket) tárolunk A fenti két lapon egyúttal egy-egy élsorozat (az adott lapot alkotó élsorozat) része is az adott él - mindkét élsorozatban tároljuk a rákövetkezőjét és megelőzőjét az adott élnek az adott lap bejárási irányának megfelelően (!) csúcs lap balra jobbra él start vég bal jobb előző köv. előző köv. a B A 0 1 c b d e Egyéb táblázatok Példa: tetraéder Csúcsok táblája csúcs ID csúcsból induló él Lapok táblája lap ID lap egy éle Shirley, Fundamentals of Computer Graphics
 csúcs lap balra jobbra él start vég bal jobb előző köv.")
8 Pl.: Egy lap összes szomszéd lapjának felsorolása Pl.: Egy lap összes szomszéd lapjának felsorolása def allneighbours ( face, edges, v e r t i c e s, faces ) : startedge = faces [ face ] edge = startedge i f edges [ startedge ]. f a c e L e f t == face : while edges [ edge ]. succleft!= startedge : p r i n t edges [ edge ]. faceright edge = edges [ edge ]. succleft else : while edges [ edge ]. succright!= startedge : p r i n t edges [ edge ]. f a c e L e f t edge = edges [ edge ]. succright Azaz: induljunk el az adott lap reprezentáns éléből (amit tárolunk a laphoz) Ha ennek az élnek a baloldali lapja az adott lap: iteráljunk végig a baloldali éllistán és írjuk ki a jobboldali lapokat (a baloldali a lekérdezést kiváltó lap) Különben a jobboldali lap az adott lap, iteráljunk végig a jobboldali lap éllistáján Az iteráció érjen véget, amint visszaérünk az adott lap reprezentáns élébe Pl.: Egy adott csúcsot tartalmazó összes lap felsorolása Fél-él adatszerkezet def allfaces ( vertex, edges, v e r t i c e s, faces ) : startedge = v e r t i c e s [ v ertex ] edge = startedge done = False while not done : i f edges [ edge ]. v e r t S t a r t == v e r t e x : p r i n t edges [ edge ]. f a c e L e f t edge = edges [ edge ]. predleft else : p r i n t edges [ edge ]. faceright edge = edges [ edge ]. predright A winged-edge élét vegyük szét két fél-élre! lényegében az élek lapra vett vetületével dolgozunk! A fél-élhez csak egy lap tartozhat + meg kell jegyeznünk a testvér fél-élét (az adott él másik oldali lapra vett vetületét) A reprezentáció központi eleme a fél-él
![f a c e L e f t == face : while edges [ edge ]. succleft!= startedge : p r i n t edges [ edge ]. faceright edge = edges [ edge ]. succleft else : while edges [ edge ]. succright!](/docs-images/44/10683358/images/page_8.jpg "= startedge : p r i n t edges [ edge ]. f a c e L e f t edge = edges [ edge ].")
9 Half-edge Half-edge Fél-él adatszerkezet Pl.: Adott lap körbejárása Szigorú értelemben véve egy fél-élhez pontosan egy csúcs, él és lap tartozik (de gyakorlatban ennél többet tárolni hasznos lehet) A következőt tároljuk egy fél-élben: az fél-él cél csúcspontja (vertex), a fél-él testvére (sym), a fél-él lapja (face) és a lapot körbefogó fél-élsorozatban a rákövetkezője (next) A lapokhoz egy tetszőleges alkotó fél-él pointerét jegyezzük fel A csúcspontokhoz egy befutó fél-élt HE sym sym = HE, HE next sym vertex = HE vertex stb. def faceloop (HE ) : loop = HE do : p r i n t HE loop = HE. next while loop!= HE
 A lapokhoz egy tetszőleges alkotó fél-él pointerét jegyezzük fel A csúcspontokhoz egy befutó fél-élt HE sym sym =")

10 Reprezentáció Reprezentáció Reprezentáció Reprezentáció
11 Görbék megadása Görbék megadása Három módot láttunk már görbék reprezentációjára: explicit: y = f (x) [ x(t) parametrikus: p(t) = y(t) implicit: x 2 + y 2 9 = 0 ], t R Most azt vizsgáljuk meg, hogy milyen adatokat kell eltárolni, hogy egy tetszőleges (ún. szabadformájú) görbét egyértelműen reprezentáljunk Ezt most a paramterikus megadási mód segítségével nézzük meg Lineáris interpoláció Lineáris interpoláció Legyen adott két pont, a, b E 3. A két ponton átmenő egyenes parametrikus egyenlete: ahol t R. p(t) = (1 t)a + tb, Ha t [0, 1], akkor az a, b pontokat összekötő egyenes szakaszt kapjuk. Az egyenes szakaszt egyértelműen azonosítja a szakasz két végpontja, a és b Ez a legegyszerűbb görbe a két pont között Hogyan lesz ebből szép görbe? Szép valami szépen, folytonosan változó
 = (1 t)a + tb, Ha t [0, 1], akkor az a, b pontokat összekötő egyenes szakaszt kapjuk.")
12 Szépség - parametrikus folytonosság Szépség - deriváltak C 0 : a görbében/felületben nincsenek lyukak, nem szakad meg sehol C 1 : a derivált is folytonosan változik (DE: a derivált paraméterezéstől függ!) C 2 : a görbe/felület második deriváltjai is folytonosan változnak [ ] x(t) Ne feledjük, parametrikus görbe p(t) = alakú y(t) [ x Tehát a deriváltak p (t) = ] [ (t) x y, p (t) (t) = ] (t) y stb. (t) alakúak [ t Példa: mi a deriváltja a p(t) = 2 ] + t t 3 görbének a t = 0 és t = 1 pontokban? Példa: mi lesz az első és második deriváltgörbéje (hodográfja) a p(t) = (1 t)a + tb görbének? Parametrikus folytonosság Parametrikus folytonosság Legyen adott két parametrikus görbe, r(t), s(t) : [0, 1] E 3, amelyeknek van egy közös pontja, azaz pl. r(1) = s(0) = p. Ekkor a két görbe a p-ben C 0 r(1) = s(0) C 1 C 0 r (1) = s (0) C 2 C 1 r (1) = s (0) C n C n 1 r (n) (1) = s (n) (0)
![stb. (t) alakúak [ t Példa: mi a deriváltja a p(t) = 2 ] + t t 3 görbének a t = 0 és t = 1 pontokban? Példa: mi lesz az első és második deriváltgörbéje (hodográfja) a p(t) = (1 t)a + tb görbének?](/docs-images/44/10683358/images/page_12.jpg "Parametrikus folytonosság Parametrikus folytonosság Legyen adott két parametrikus görbe, r(t), s(t) : [0, 1] E 3, amelyeknek van egy közös pontja, azaz pl. r(1) = s(0) = p.")
13 Parametrikus folytonosság Parametrikus folytonosság Törött vonal Adottak p i E 3, i = 0,..., n pontok és mindegyik p i, p i+1, i = 0,..., n 1 pontpárt kössünk össze egy szakasszal! Törött vonal Ha egy sima görbét szeretnénk ábrázolni, akkor szakaszokkal kell közelítenünk (lényegében: tesszellálni) Legyenek t 0 t 1... t n R paraméterek a p i pontokhoz hozzárendelve Ekkor az eredmény törött vonal felírható egyetlen paraméterrel is: ha a t [t 0, t n ] paraméter aktuális értékére t [t i, t i+1 ] igaz, akkor a hozzátartozó pont t i+1 t p i + t t i p i+1 t i+1 t i t i+1 t i Ez egy interpoláló megközelítés, azaz a reprezentációt képező ponthalmaz összes elemén áthalad a reprezentált görbe

14 Polinomiális görbék Polinomiális görbék Ha C 0 -nál magasabb fokú garantált (!) folytonosságot akarunk, akkor próbálkozhatunk polinomokkal A p 0,..., p n pontokra illeszthető egy n-edfokú polinom A jól ismert hatványbázisban ez p(t) = n [ ] [ ] [ ] i=0 a it i, t R alakú (pl.: p(t) = t t + ) 1 1 De mi lenne a geometriai értelmezése az a i R 3 együtthatóknak? Mit ábrázolnak? másik bázist keressünk inkább, ahol a reprezentációt képező elemeknek szemléletesebb jelentése van De előtte oldjuk még meg a feladatot! Legyenek adottak p 0,..., p n E 3 pontok és t 0 < t 1 <.. < t n R paraméterértékek Keressük azt az n-edfokú p(t) = n i=0 a it i, t R parametrikus görbét, amely az adott pontokat interpolálja az előírt paraméterértékeknél, azaz amelyre p(t i ) = p i, i = 0, 1,.., n Polinomiális görbék Megoldandó tehát az 1 t 0 t0 2.. t n 0 a 0 1 t 1 t1 2.. t1 n a 1 p =.. 1 t n tn 2.. tn n p a n n } {{ } } {{ } } {{ } b V a lineáris egyenletrendszer, az ismeretlen a 0,.., a n R 3 együtthatókra Ha det(v ) 0, akkor van megoldás De vegyük észre: V egy Vandermonde mátrix determinánsa nem nulla (mivel nincs i j, hogy t i = t j ) A keresett együtthatók tehát a = V 1 b Polinomiális görbék - parabola példa Tehát ha például egy parabolával szeretném a t = 0, 1, 2 pontokban interpolálni a p 0, p 1, p 2 pontokat, akkor egyenletet kell megoldanom Azaz a keresett együtthatók a 0 a 1 a 2 = p 0 p 1 p 2 a a 1 = a A parabola pedig p(t) = a 2 t 2 + a 1 t + a 0 p 0 p 1 p 2

15 Harmadfokú Hermite interpoláció Harmadfokú Hermite interpoláció Két pont között, [0, 1]-re megfogalmazza, keressük a A görbénk tárolásához bizonyos pontokban jegyezzük fel a görbe pozícióját és egy bejárásához tartozó sebesség, gyorsulás stb.... vektorát (azaz legyenek adottak x(t i ), x (t i ), x (t i ),...) pont és derivált adatok, i = 0, 1,...) Keressünk egy olyan bázist, amibe ezeket a fenti adatokat koordinátaként beírva az adott szinten a beírt adatot kapjuk vissza p(t) = H0 0 (t)p 0 + H0 1 (t)m 0 + H1 0 (t)p 1 + H1 1 (t)m 1 alakú parametrikus görbét amelyre p(0) = p 0 p(1) = p 1 p (0) = m 0 p (1) = m 1 Harmadfokú Hermite bázisfüggvények p(t) = H0 0(t)p 0 + H0 1(t)m 0 + H1 0(t)p 1 + H1 1(t)m 1 Keressük harmadfokú, egész polinomként az ismeretlen H j i (t) bázisfüggvényeket, azaz legyen H j i (t) = a ijt 3 + b ij t 2 + c ij t + d ij Azt akarjuk, hogy p(0) = p 0, p(1) = p 1, p (0) = m 0, p (1) = m 1 teljesüljenek Ekkor megoldandó a ij, b ij, c ij, d ij, i, j = 0, 1-re H 0(0) = 1 H1 0 (0) = 0 H0 1 (0) = 0 H1 1 (0) = 0 (H0 0) (0) = 0 (H0 1) (0) = 1 (H1 0) (0) = 0 (H1 1) (0) = 0 H0 0(1) = 0 H1 0 (1) = 0 H0 1 (1) = 1 H1 1 (1) = 0 (H0 0) (1) = 0 (H0 1) (1) = 0 (H1 0) (1) = 0 (H1 1) (1) = 1 Harmadfokú Hermite bázis A harmadfokú bázisunk ekkor a következő lesz: H 0 0 (t) = 2t3 3t H 1 0 (t) = t3 2t 2 + t H 0 1 (t) = 2t3 + 3t 2 H 1 1 (t) = t3 t 2 Ha van n + 1 bejövő adatunk, akkor minden pár közé szerkesztve egy-egy görbét az összeillesztésből kapott n harmadfokú szegmensből álló spline C 1 lesz
 = p 0 p(1) = p 1 p (0) = m 0 p (1) = m 1 Harmadfokú Hermite bázisfüggvények p(t) = H0 0(t)p 0 + H0 1(t)m 0 + H1 0(t)p 1 + H1 1(t)m 1 Keressük harmadfokú, egész")

16 Harmadfokú Hermite bázis Kitérő - geometriai folytonosság A szemünknek nem csak az lesz folytonos, ami parametrikusan is az Nem teljesen szabatos matematikai definíciókat következnek A geometriai folytonosságnál paraméterezéstől független folytonossági megkötéseket teszünk: G 0 : a görbében/felületben nincsenek lyukak, nem szakad meg sehol G 1 : a csatlakozásoknál ha a deriváltak nem is egyeznek meg, de α > 0 úgy, hogy m i = αm i+1 G 2 : a görbe/felület görbülete folytonos a csatlakozásban is Catmull-Rom spline Kochanek-Bartels spline Ne legyen közvetlenül adott a derivált, hanem a pontokból számoljuk őket a következőképp: m i = p i+1 p i 1 t i+1 t i 1 Ezután a megadott p i és a fentiek szerint számított m i adatokra páronként illesszünk Hermite-görbéket A Catmull-Rom spline-hoz hasonlóan itt is számított adat lesz a tangens, de most három paraméter is adott hozzá: T : tension, T [ 1, 1] B: bias, B [ 1, 1] C: folytonosság (simaság), C [ 1, 1] A Catmull-Rom spline-t kapjuk, ha T = B = C = 0

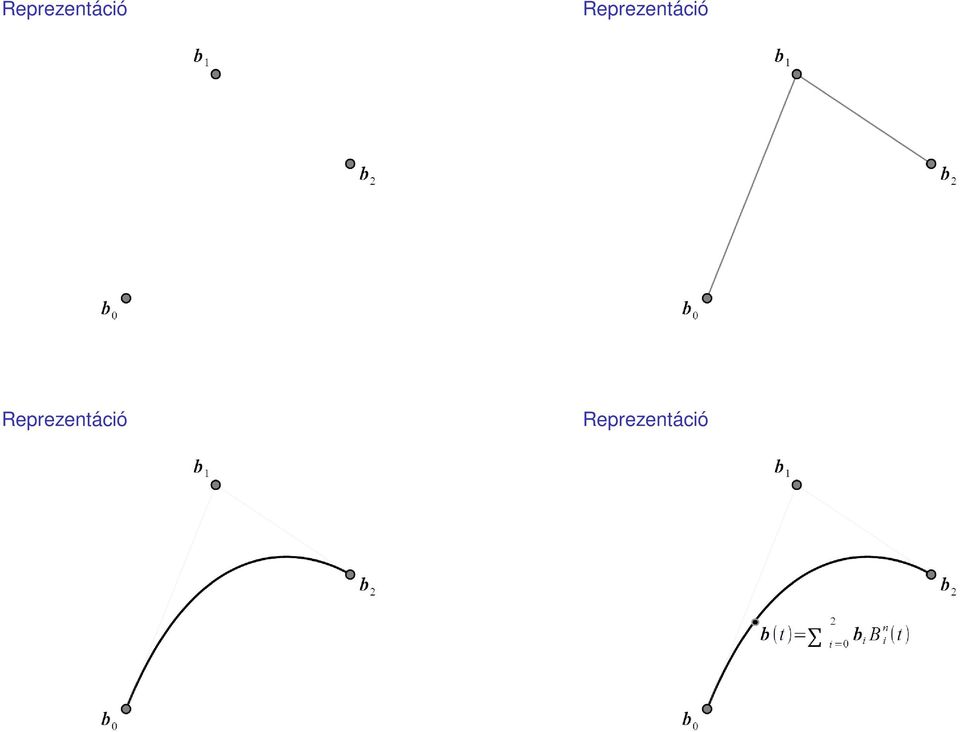
17 Kochanek-Bartels spline Kochanek-Bartels spline A fentiek felhasználásával az i-edik szegmens két végpontjának derivált-értékei legyenek (1 T )(1 + B)(1 + C) m i = (p i p i 1 ) 2 (1 T )(1 B)(1 C) + (p i+1 p i ) 2 (1 T )(1 + B)(1 C) m i+1 = (p i+1 p i ) 2 (1 T )(1 B)(1 + C) + (p i+2 p i+1 ) 2 Bézier-görbe kitérő- de Casteljau algoritmus Bézier-görbe Használjuk a Bernstein-bázist: B n i (t) := ( n i A b 0,..., b n R 3 kontrollpontok által meghatározott n-edfokú Bézier-görbe ekkor ) t i (1 t) n i b(t) = n Bi n (t)b i, i=0 ahol t [0, 1]. HF: n i=0 Bn i (t) = 1 teljesül, t [0, 1] A görbe nagyjából követi a vezérlőpontok poligonjának az alakját, de nem halad át mindegyiken! Ez egy approximáló séma További részletek: Geometriai Modellezés MSc, Analízis (Stone-Weierstrass approximációs tétel)
![n i A b 0,..., b n R 3 kontrollpontok által meghatározott n-edfokú Bézier-görbe ekkor ) t i (1 t) n i b(t) = n Bi n (t)b i, i=0 ahol t [0, 1].](/docs-images/44/10683358/images/page_17.jpg "HF: n i=0 Bn i (t) = 1 teljesül, t [0, 1] A görbe nagyjából követi a vezérlőpontok poligonjának az alakját, de nem halad át mindegyiken!")
18 Bézier-görbe Bézier-görbe tulajdonságok Egyetlen kontrollpont módosítása az egész görbére hat Bernstein-bázis néhány n-re: B 1 0 (t) = 1 t, B1 1 (t) = t lineáris interpoláció! B0 2(t) = (1 t)2, B1 2(t) = 2t(1 t), B2 2 (t) = t 2 n = 3: HF Lényegében összemossuk a kontrollpontjainkat egymással a fenti függvényekkel súlyozva őket, ezzel megmondva, hogy egy adott t [0, 1] paraméterértéknél melyik kontrollpont mennyire játszik fontos szerepet a görbe alakjának meghatározásában A Bézier görbe áthalad a két végponton (b 0 és b n pontokon) A Bézier görbe alakja változatlan marad, ha [0, 1] helyett [a, b] fölött rajzolom fel, azaz a b( t a b a ), t [a, b] ugyanaz a görbe (mint ponthalmaz), mint a b(t), t [0, 1] Azaz a Bézier görbe invariáns az affin paramétertranszformációkra Vegyük észre: az Hermite görbe nem invariáns ezekre! Bézier-görbe - bázisfüggvények Interpoláció vagy approximáció? Interpoláció: a görbének át kell haladnia a vezérlőpontokon
, t [a, b] ugyanaz a görbe (mint ponthalmaz), mint a b(t), t [0, 1] Azaz a Bézier görbe invariáns az affin")
19 Interpoláció vagy approximáció? Sok vezérlőpont esete Approximáció: a görbének csak közelítenie kell a vezérlőpontokat A vezérlőpontok számával együtt nő a fokszám egy idő után lehet meg kell elégednünk az approximációval, de az sem lesz jó A magas fokszámú polinomok erősen hullámozhatnak Runge-problémája: az f (x) = x 2 függvény (piros) közelítése során ötödfokú (kék) és kilencedfokú (zöld) polinomokkal Sok vezérlőpont esete Spline görbék Ne egyetlen polinommal próbáljuk interpolálni vagy approximálni az adatpontjainkat (vezérlőpontjainkat)! Használjunk összetett görbét, amely alacsonyabb fokszámú szegmensekből áll Így kiküszöböhető a magas fokszámmal járó oszcilláció, illetve a kontrollpontok módosításának kihatása az egész görbére, de a polinomiális szegmensek folytonos csatlakozására külön figyelni kell És még sok minden másra is, de... Részletek: NumAnal - BSc.; Geometriai Modellezés, Felület és Testmodellezés - MSc.
!")
20 Spline görbék Subdivision görbék Egy ötlet: az eddigiek során rögtön egy polinomot állítottunk elő a kontrollpontjainkból (lényegében: a kontrollpontok által meghatározott kontroll-poligonból) Megjelenítés során viszont úgyis szakaszokkal kell közelíteni! dolgozzunk magán a kontroll-poligonon! A subdivision, vagy rekurzív felosztással definiált sémák a kiinduló ponthalmazunkat (kontrolpontok halmazát) rekurzívan sűrítik, egyre finomabb lineáris közelítést is adva (legtöbbször) Subdivision görbék Subdivision görbék - Chaikin saroklevágási algoritmus A kiinduló ponthalmaz által meghatározott görbének a rekurzív sürítést határgörbéjét ( végtelen sok finomítás utáni pontok halmazát) tekintjük Nagy kifejezőerő (például a Chaikin saroklevágási algoritmus egy másodfokú B-spline görbét ad), de görbéknél lehet hatékonyabban is számolni sok esetben Legyen az aktuális vezérlőpont halmazunk {p i R 3 } n i=0 Az iterációs lépés során az új vezérlőpont halmazunk {q i, r i R 3 } n 1 i=0 lesz, ahol q i = 3 4 p i p i+1 r i = 1 4 p i p i+1
")
21 Subdivision görbék - Chaikin saroklevágási algoritmus
Valasek Gábor
 Geometria és topológia tárolása Görbék reprezentációja Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2015/2016. őszi félév Geometria és topológia tárolása Görbék reprezentációja
Geometria és topológia tárolása Görbék reprezentációja Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2015/2016. őszi félév Geometria és topológia tárolása Görbék reprezentációja
Valasek Gábor
 Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. őszi félév Tartalom 1 Motiváció Görbék Hermite interpoláció Catmull-Rom spline Kochanek-Bartels spline Műveletek
Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. őszi félév Tartalom 1 Motiváció Görbék Hermite interpoláció Catmull-Rom spline Kochanek-Bartels spline Műveletek
Geometria brute force tárolása
 Virtuális világ tárolása - kérdések Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar Hol táruljuk az adatokat? Mem. vagy HDD? Mire optimalizálunk? Rajzolás
Virtuális világ tárolása - kérdések Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar Hol táruljuk az adatokat? Mem. vagy HDD? Mire optimalizálunk? Rajzolás
Görbe- és felületmodellezés. Szplájnok Felületmodellezés
 Görbe- és felületmodellezés Szplájnok Felületmodellezés Spline (szplájn) Spline: Szakaszosan, parametrikus polinomokkal leírt görbe A spline nevét arról a rugalmasan hajlítható vonalzóról kapta, melyet
Görbe- és felületmodellezés Szplájnok Felületmodellezés Spline (szplájn) Spline: Szakaszosan, parametrikus polinomokkal leírt görbe A spline nevét arról a rugalmasan hajlítható vonalzóról kapta, melyet
Klár Gergely 2010/2011. tavaszi félév
 Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Virtuális világ tárolása 1 Virtuális világ tárolása 2 3 4 Virtuális világ
Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Virtuális világ tárolása 1 Virtuális világ tárolása 2 3 4 Virtuális világ
Hajder Levente 2018/2019. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 Törtvonal Felületi folytonosságok B-spline Spline variánsok Felosztott (subdivision) görbék
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 Törtvonal Felületi folytonosságok B-spline Spline variánsok Felosztott (subdivision) görbék
Valasek Gábor tavaszi félév
 Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016-2017 tavaszi félév Tartalom Tartalom Áttekintés Tartalom B-reṕ Attekintés Topológiai adatszerkezetek Szárnyas-él adatszerkezet
Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016-2017 tavaszi félév Tartalom Tartalom Áttekintés Tartalom B-reṕ Attekintés Topológiai adatszerkezetek Szárnyas-él adatszerkezet
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Geometriai modellezés. Szécsi László
 Geometriai modellezés Szécsi László Adatáramlás vezérlés Animáció világleírás Modellezés kamera Virtuális világ kép Képszintézis A modellezés részfeladatai Geometria megadása [1. előadás] pont, görbe,
Geometriai modellezés Szécsi László Adatáramlás vezérlés Animáció világleírás Modellezés kamera Virtuális világ kép Képszintézis A modellezés részfeladatai Geometria megadása [1. előadás] pont, görbe,
(Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.
 Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.") Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
MÉSZÁROS JÓZSEFNÉ, NUMERIKUS MÓDSZEREK
 MÉSZÁROS JÓZSEFNÉ, NUmERIKUS módszerek 9 FÜGGVÉNYKÖZELÍTÉSEK IX. SPLINE INTERPOLÁCIÓ 1. SPLINE FÜGGVÉNYEK A Lagrange interpolációnál említettük, hogy az ún. globális interpoláció helyett gyakran célszerű
MÉSZÁROS JÓZSEFNÉ, NUmERIKUS módszerek 9 FÜGGVÉNYKÖZELÍTÉSEK IX. SPLINE INTERPOLÁCIÓ 1. SPLINE FÜGGVÉNYEK A Lagrange interpolációnál említettük, hogy az ún. globális interpoláció helyett gyakran célszerű
Görbemodellezés. Interpoláció Approximáció
 Görbemodellezés Interpoláció Approximáció Motiváció Mi okozhat problémát egy görbe megjelenítésekor? 1. A paraméteres alak segítségével történő megjelenítése nagyon bonyolult számításokat vehet igénybe.
Görbemodellezés Interpoláció Approximáció Motiváció Mi okozhat problémát egy görbe megjelenítésekor? 1. A paraméteres alak segítségével történő megjelenítése nagyon bonyolult számításokat vehet igénybe.
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás ek - 2019. április 2. http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME,
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás ek - 2019. április 2. http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME,
Lineáris algebra numerikus módszerei
 Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás Önálló projektek - 2017. április 7. http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás Önálló projektek - 2017. április 7. http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
GPK M1 (BME) Interpoláció / 16
 Interpoláció / 16") Interpoláció Matematika M1 gépészmérnököknek 2017. március 13. GPK M1 (BME) Interpoláció 2017 1 / 16 Az interpoláció alapfeladata - Példa Tegyük fel, hogy egy ipari termék - pl. autó - előzetes konstrukciójának
Interpoláció Matematika M1 gépészmérnököknek 2017. március 13. GPK M1 (BME) Interpoláció 2017 1 / 16 Az interpoláció alapfeladata - Példa Tegyük fel, hogy egy ipari termék - pl. autó - előzetes konstrukciójának
Eddig csak a polinom x-ben felvett értékét kerestük
 Interpolációs polinom együtthatói Eddig csak a polinom x-ben felvett értékét kerestük Ez jó, ha kevés x-re kell kiértékelni Ha sok ismeretlen f (x)-et keresünk, akkor jobb kiszámolni az együtthatókat,
Interpolációs polinom együtthatói Eddig csak a polinom x-ben felvett értékét kerestük Ez jó, ha kevés x-re kell kiértékelni Ha sok ismeretlen f (x)-et keresünk, akkor jobb kiszámolni az együtthatókat,
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
3. Görbe modellezés. Görbe modellezés 1
 Görbe modellezés. Görbe modellezés A geometriai alakzatok modellezése során számos olyan feladat adódik, melyben megadott pontokra megadott sorrendben, görbéket kell illeszteni, vagy egy grakus tervez
Görbe modellezés. Görbe modellezés A geometriai alakzatok modellezése során számos olyan feladat adódik, melyben megadott pontokra megadott sorrendben, görbéket kell illeszteni, vagy egy grakus tervez
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Termék modell. Definíció:
 Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
CAD technikák A számítógépes tervezés geometriai alapjai: görbék típusai, matematikai leírás, manipulációk görbékkel.
 A számítógépes tervezés geometriai alapjai: görbék típusai, matematikai leírás, manipulációk görbékkel. III. előadás 2008. február 25. Függvények görbék leírására Egyszerű függvények: analitikus görbék
A számítógépes tervezés geometriai alapjai: görbék típusai, matematikai leírás, manipulációk görbékkel. III. előadás 2008. február 25. Függvények görbék leírására Egyszerű függvények: analitikus görbék
3D Számítógépes Geometria II.
 3D Számítógépes Geometria II. Önálló hallgatói projektek, 2018. szept. 24. http://cg.iit.bme.hu/portal/3dgeo2 https://www.vik.bme.hu/kepzes/targyak/viiiav16 Dr. Várady Tamás, Dr. Salvi Péter, Vaitkus Márton
3D Számítógépes Geometria II. Önálló hallgatói projektek, 2018. szept. 24. http://cg.iit.bme.hu/portal/3dgeo2 https://www.vik.bme.hu/kepzes/targyak/viiiav16 Dr. Várady Tamás, Dr. Salvi Péter, Vaitkus Márton
Számítógépes Grafika SZIE YMÉK
 Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Vida János. Geometriai modellezés III. Görbék és felületek
 Vida János Geometriai modellezés III. Görbék és felületek Oktatási segédlet Piszkozat Budapest, 2010 1 E segédletet az ELTE Informatikai Karának azok a beiratkozott hallgatói használhatják, akik A geometriai
Vida János Geometriai modellezés III. Görbék és felületek Oktatási segédlet Piszkozat Budapest, 2010 1 E segédletet az ELTE Informatikai Karának azok a beiratkozott hallgatói használhatják, akik A geometriai
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 12. Tömör testek modellezése http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME,
3D számítógépes geometria és alakzatrekonstrukció 12. Tömör testek modellezése http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME,
TÉRINFORMATIKAI ALGORITMUSOK
 Topológiai algoritmusok és adatszerkezetek TÉRINFORMATIKAI ALGORITMUSOK Cserép Máté mcserep@caesar.elte.hu 2015. november 18. EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR BEVEZETŐ Topológia: olyan matematikai
Topológiai algoritmusok és adatszerkezetek TÉRINFORMATIKAI ALGORITMUSOK Cserép Máté mcserep@caesar.elte.hu 2015. november 18. EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR BEVEZETŐ Topológia: olyan matematikai
1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás)
") Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
TÉRINFORMATIKAI ALGORITMUSOK
 Topológiai algoritmusok és adatszerkezetek TÉRINFORMATIKAI ALGORITMUSOK Cserép Máté mcserep@inf.elte.hu 2017. november 22. EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR BEVEZETŐ Topológia: olyan matematikai
Topológiai algoritmusok és adatszerkezetek TÉRINFORMATIKAI ALGORITMUSOK Cserép Máté mcserep@inf.elte.hu 2017. november 22. EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR BEVEZETŐ Topológia: olyan matematikai
Numerikus módszerek II. zárthelyi dolgozat, megoldások, 2014/15. I. félév, A. csoport. x 2. c = 3 5, s = 4
 Numerikus módszerek II. zárthelyi dolgozat, megoldások, 204/5. I. félév, A. csoport. Feladat. (6p) Alkalmas módon választva egy Givens-forgatást, határozzuk meg az A mátrix QR-felbontását! Oldjuk meg ennek
Numerikus módszerek II. zárthelyi dolgozat, megoldások, 204/5. I. félév, A. csoport. Feladat. (6p) Alkalmas módon választva egy Givens-forgatást, határozzuk meg az A mátrix QR-felbontását! Oldjuk meg ennek
Klár Gergely 2010/2011. tavaszi félév
 Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Pont 1 Pont 2 3 4 5 Tartalom Pont Descartes-koordináták Homogén koordináták
Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Pont 1 Pont 2 3 4 5 Tartalom Pont Descartes-koordináták Homogén koordináták
GÖRBÉK ÉS FELÜLETEK ILLESZTÉSE KÉNYSZEREKKEL II.
 GÖRBÉK ÉS FELÜLETEK ILLESZTÉSE KÉNYSZEREKKEL II. Érdekességek a geometriai modellezésben Kovács István MIRŐL LESZ SZÓ? Kényszerek automatikus felismerése 1. Lokális kényszerek (merőlegesség, párhuzamosság,
GÖRBÉK ÉS FELÜLETEK ILLESZTÉSE KÉNYSZEREKKEL II. Érdekességek a geometriai modellezésben Kovács István MIRŐL LESZ SZÓ? Kényszerek automatikus felismerése 1. Lokális kényszerek (merőlegesség, párhuzamosság,
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
TÉRINFORMATIKAI ÉS TÁVÉRZÉKELÉSI ALKALMAZÁSOK FEJLESZTÉSE
 Topológiai algoritmusok és adatszerkezetek TÉRINFORMATIKAI ÉS TÁVÉRZÉKELÉSI ALKALMAZÁSOK FEJLESZTÉSE Cserép Máté mcserep@caesar.elte.hu 2015. május 5. EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR BEVEZETŐ
Topológiai algoritmusok és adatszerkezetek TÉRINFORMATIKAI ÉS TÁVÉRZÉKELÉSI ALKALMAZÁSOK FEJLESZTÉSE Cserép Máté mcserep@caesar.elte.hu 2015. május 5. EÖTVÖS LORÁND TUDOMÁNYEGYETEM INFORMATIKAI KAR BEVEZETŐ
LNM folytonos Az interpoláció Lagrange interpoláció. Lineáris algebra numerikus módszerei
 Legkisebb négyzetek módszere, folytonos eset Folytonos eset Legyen f C[a, b]és h(x) = a 1 φ 1 (x) + a 2 φ 2 (x) +... + a n φ n (x). Ekkor tehát az n 2 F (a 1,..., a n ) = f a i φ i = = b a i=1 f (x) 2
Legkisebb négyzetek módszere, folytonos eset Folytonos eset Legyen f C[a, b]és h(x) = a 1 φ 1 (x) + a 2 φ 2 (x) +... + a n φ n (x). Ekkor tehát az n 2 F (a 1,..., a n ) = f a i φ i = = b a i=1 f (x) 2
Görbék és felületek modellezése Juhász, Imre
 Görbék és felületek modellezése Juhász, Imre Görbék és felületek modellezése Juhász, Imre Miskolci Egyetem Kelet-Magyarországi Informatika Tananyag Tárház Kivonat Nemzeti Fejlesztési Ügynökség http://ujszechenyiterv.gov.hu/
Görbék és felületek modellezése Juhász, Imre Görbék és felületek modellezése Juhász, Imre Miskolci Egyetem Kelet-Magyarországi Informatika Tananyag Tárház Kivonat Nemzeti Fejlesztési Ügynökség http://ujszechenyiterv.gov.hu/
Taylor-polinomok. 1. Alapfeladatok. 2015. április 11. 1. Feladat: Írjuk fel az f(x) = e 2x függvény másodfokú Maclaurinpolinomját!
 = e 2x függvény másodfokú Maclaurinpolinomját!") Taylor-polinomok 205. április.. Alapfeladatok. Feladat: Írjuk fel az fx) = e 2x függvény másodfokú Maclaurinpolinomját! Megoldás: A feladatot kétféle úton is megoldjuk. Az els megoldásban induljunk el
Taylor-polinomok 205. április.. Alapfeladatok. Feladat: Írjuk fel az fx) = e 2x függvény másodfokú Maclaurinpolinomját! Megoldás: A feladatot kétféle úton is megoldjuk. Az els megoldásban induljunk el
Legkisebb négyzetek módszere, Spline interpoláció
 Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
10. Koordinátageometria
 I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
Diszkréten mintavételezett függvények
 Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Gyakorló feladatok. Agbeko Kwami Nutefe és Nagy Noémi
 Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 2a. Háromszöghálók http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki
3D számítógépes geometria és alakzatrekonstrukció 2a. Háromszöghálók http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki
Numerikus Matematika
 Numerikus Matematika Baran Ágnes Gyakorlat Interpoláció Baran Ágnes Numerikus Matematika 6.-7. Gyakorlat 1 / 40 Lagrange-interpoláció Példa Határozzuk meg a ( 2, 5), ( 1, 3), (0, 1), (2, 15) pontokra illeszkedő
Numerikus Matematika Baran Ágnes Gyakorlat Interpoláció Baran Ágnes Numerikus Matematika 6.-7. Gyakorlat 1 / 40 Lagrange-interpoláció Példa Határozzuk meg a ( 2, 5), ( 1, 3), (0, 1), (2, 15) pontokra illeszkedő
Fraktálok. Kontrakciók Affin leképezések. Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék. TARTALOMJEGYZÉK Kontrakciók Affin transzformációk
 Fraktálok Kontrakciók Affin leképezések Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék TARTALOMJEGYZÉK 1 of 71 A Lipschitz tulajdonság ÁTMÉRŐ, PONT ÉS HALMAZ TÁVOLSÁGA Definíció Az (S, ρ) metrikus tér
Fraktálok Kontrakciók Affin leképezések Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék TARTALOMJEGYZÉK 1 of 71 A Lipschitz tulajdonság ÁTMÉRŐ, PONT ÉS HALMAZ TÁVOLSÁGA Definíció Az (S, ρ) metrikus tér
1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1
![1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1](/thumbs/88/116339870.jpg "1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1") numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport
 Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Felügyelt önálló tanulás - Analízis III.
 Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
Numerikus matematika vizsga
 1. Az a = 2, t = 4, k = 3, k + = 2 számábrázolási jellemzők mellett hány pozitív, normalizált lebegőpontos szám ábrázolható? Adja meg a legnagyobb ábrázolható számot! Mi lesz a 0.8-hoz rendelt lebegőpontos
1. Az a = 2, t = 4, k = 3, k + = 2 számábrázolási jellemzők mellett hány pozitív, normalizált lebegőpontos szám ábrázolható? Adja meg a legnagyobb ábrázolható számot! Mi lesz a 0.8-hoz rendelt lebegőpontos
MATLAB. 5. gyakorlat. Polinomok, deriválás, integrálás
 MATLAB 5. gyakorlat Polinomok, deriválás, integrálás Menetrend Kis ZH Polinomok Numerikus deriválás Numerikus integrálás (+ anonim függvények) pdf Kis ZH Polinomok Sok függvény és valós folyamat leírható
MATLAB 5. gyakorlat Polinomok, deriválás, integrálás Menetrend Kis ZH Polinomok Numerikus deriválás Numerikus integrálás (+ anonim függvények) pdf Kis ZH Polinomok Sok függvény és valós folyamat leírható
HÁZI FELADATOK. 1. félév. 1. konferencia A lineáris algebra alapjai
 HÁZI FELADATOK. félév. konferencia A lineáris algebra alapjai Értékelés:. egység: önálló feladatmegoldás.8. Döntse el, párhuzamosak-e a következő vektorpárok: a) a( ; ; 7) b(; 5; ) b) c(; 9; 5) d(8; 6;
HÁZI FELADATOK. félév. konferencia A lineáris algebra alapjai Értékelés:. egység: önálló feladatmegoldás.8. Döntse el, párhuzamosak-e a következő vektorpárok: a) a( ; ; 7) b(; 5; ) b) c(; 9; 5) d(8; 6;
22. GRÁFOK ÁBRÁZOLÁSA
 22. GRÁFOK ÁBRÁZOLÁSA A megoldandó feladatok, problémák modellezése során sokszor gráfokat alkalmazunk. A gráf fogalmát a matematikából ismertnek vehetjük. A modellezés során a gráfok több változata is
22. GRÁFOK ÁBRÁZOLÁSA A megoldandó feladatok, problémák modellezése során sokszor gráfokat alkalmazunk. A gráf fogalmát a matematikából ismertnek vehetjük. A modellezés során a gráfok több változata is
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
3D Számítógépes Geometria II.
 3D Számítógépes Geometria II. 1. Bevezetés http://cg.iit.bme.hu/portal/3dgeo2 https://www.vik.bme.hu/kepzes/targyak/viiiav16 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki és Informatikai Kar Irányítástechnika
3D Számítógépes Geometria II. 1. Bevezetés http://cg.iit.bme.hu/portal/3dgeo2 https://www.vik.bme.hu/kepzes/targyak/viiiav16 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki és Informatikai Kar Irányítástechnika
Koordináta-geometria feladatok (emelt szint)
") Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Hajder Levente 2018/2019. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Hajder Levente 2014/2015. tavaszi félév
 Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
Gauss-Jordan módszer Legkisebb négyzetek módszere, egyenes LNM, polinom LNM, függvény. Lineáris algebra numerikus módszerei
 A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
Polinomok, Lagrange interpoláció
 Közelítő és szimbolikus számítások 8. gyakorlat Polinomok, Lagrange interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Polinomok
Közelítő és szimbolikus számítások 8. gyakorlat Polinomok, Lagrange interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Polinomok
3D-s számítógépes geometria és alakzatrekonstrukció
 3D-s számítógépes geometria és alakzatrekonstrukció 2a. Háromszöghálók http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás, Salvi Péter BME, Villamosmérnöki
3D-s számítógépes geometria és alakzatrekonstrukció 2a. Háromszöghálók http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás, Salvi Péter BME, Villamosmérnöki
First Prev Next Last Go Back Full Screen Close Quit. Komplex számok (2)
") 2. előadás Komplex számok (2) 1. A a + bi (a, b) kölcsönösen egyértelmű megfeleltetés lehetővé teszi, hogy a komplex számokat a sík pontjaival, illetve helyvektoraival ábrázoljuk. A derékszögű koordináta
2. előadás Komplex számok (2) 1. A a + bi (a, b) kölcsönösen egyértelmű megfeleltetés lehetővé teszi, hogy a komplex számokat a sík pontjaival, illetve helyvektoraival ábrázoljuk. A derékszögű koordináta
6. Függvények. 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban?
 6. Függvények I. Nulladik ZH-ban láttuk: 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban? f x g x cos x h x x ( ) sin x (A) Az f és a h. (B) Mindhárom. (C) Csak az f.
6. Függvények I. Nulladik ZH-ban láttuk: 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban? f x g x cos x h x x ( ) sin x (A) Az f és a h. (B) Mindhárom. (C) Csak az f.
Jegyzet tervezet Összeállította: Dr. Boza Pál fıiskolai tanár 2009
 Tartalomjegyzék 1. Alkatrészek dokumentálása számítástechnikai eszközökkel... 3 1.1. Az alkatrészt leíró geometriai modellek... 3 1.2. Síkbeli geometriai alakzatok leírása... 5 1.3. Felületek leírása...
Tartalomjegyzék 1. Alkatrészek dokumentálása számítástechnikai eszközökkel... 3 1.1. Az alkatrészt leíró geometriai modellek... 3 1.2. Síkbeli geometriai alakzatok leírása... 5 1.3. Felületek leírása...
Többváltozós, valós értékű függvények
 TÖ Többváltozós, valós értékű függvények TÖ Definíció: többváltozós függvények Azokat a függvényeket, melyeknek az értelmezési tartománya R n egy részhalmaza, n változós függvényeknek nevezzük. TÖ Példák:.
TÖ Többváltozós, valós értékű függvények TÖ Definíció: többváltozós függvények Azokat a függvényeket, melyeknek az értelmezési tartománya R n egy részhalmaza, n változós függvényeknek nevezzük. TÖ Példák:.
Geometria. a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk)
") 1. Térelemek Geometria a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk) b. Def: félegyenes, szakasz, félsík, féltér. c. Kölcsönös helyzetük: i. pont és (egyenes vagy
1. Térelemek Geometria a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk) b. Def: félegyenes, szakasz, félsík, féltér. c. Kölcsönös helyzetük: i. pont és (egyenes vagy
Klár Gergely
 Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. őszi félév Tartalom Vágás Szakaszvágás Poligonvágás 1 Vágás Szakaszvágás Poligonvágás 2 Vágás
Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. őszi félév Tartalom Vágás Szakaszvágás Poligonvágás 1 Vágás Szakaszvágás Poligonvágás 2 Vágás
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
A Vonallánc készlet parancsai lehetővé teszik vonalláncok és sokszögek rajzolását.
 11. Geometriai elemek 883 11.3. Vonallánc A Vonallánc készlet parancsai lehetővé teszik vonalláncok és sokszögek rajzolását. A vonallánc egy olyan alapelem, amely szakaszok láncolatából áll. A sokszög
11. Geometriai elemek 883 11.3. Vonallánc A Vonallánc készlet parancsai lehetővé teszik vonalláncok és sokszögek rajzolását. A vonallánc egy olyan alapelem, amely szakaszok láncolatából áll. A sokszög
4. Felületek Forgásfelületek. Felületek 1. Legyen adott egy paramétersíkbeli T tartomány. A paramétersíkot az u és v koordinátatengelyekkel
 Felületek 1 4. Felületek Legyen adott egy paramétersíkbeli T tartomány. A paramétersíkot az u és v koordinátatengelyekkel adjuk meg. Ekkor egy F felületet az (u, v) r(u, v), (u, v) T kétváltozós vektor-vektor
Felületek 1 4. Felületek Legyen adott egy paramétersíkbeli T tartomány. A paramétersíkot az u és v koordinátatengelyekkel adjuk meg. Ekkor egy F felületet az (u, v) r(u, v), (u, v) T kétváltozós vektor-vektor
Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével
 Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 213. október 8. Javítva: 213.1.13. Határozzuk
Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 213. október 8. Javítva: 213.1.13. Határozzuk
A számítógépes grafika alapjai kurzus, vizsgatételek és tankönyvi referenciák 2014
 Pázmány Péter Katolikus Egyetem Információs Technológiai Kar A számítógépes grafika alapjai kurzus, vizsgatételek és tankönyvi referenciák 2014 Benedek Csaba A vizsga menete: a vizsgázó egy A illetve egy
Pázmány Péter Katolikus Egyetem Információs Technológiai Kar A számítógépes grafika alapjai kurzus, vizsgatételek és tankönyvi referenciák 2014 Benedek Csaba A vizsga menete: a vizsgázó egy A illetve egy
Totális Unimodularitás és LP dualitás. Tapolcai János
 Totális Unimodularitás és LP dualitás Tapolcai János tapolcai@tmit.bme.hu 1 Optimalizálási feladat kezelése NP-nehéz Hatékony megoldás vélhetően nem létezik Jó esetben hatékony algoritmussal közelíteni
Totális Unimodularitás és LP dualitás Tapolcai János tapolcai@tmit.bme.hu 1 Optimalizálási feladat kezelése NP-nehéz Hatékony megoldás vélhetően nem létezik Jó esetben hatékony algoritmussal közelíteni
Végeselem modellezés alapjai 1. óra
 Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
17. előadás: Vektorok a térben
 17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel
 Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel Segédlet az A végeselem módszer alapjai tárgy 4. laborgyakorlatához http://www.mm.bme.hu/~kossa/vemalap4.pdf Kossa Attila (kossa@mm.bme.hu)
Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel Segédlet az A végeselem módszer alapjai tárgy 4. laborgyakorlatához http://www.mm.bme.hu/~kossa/vemalap4.pdf Kossa Attila (kossa@mm.bme.hu)
1. Görbe illesztés a legkissebb négyzetek módszerével
 GÖRBE ILLESZTÉS A LEGKISSEBB ÉGYZETEK MÓDSZERÉVEL. Görbe illesztés a legkissebb négyzetek módszerével Az előző gyakorlaton megismerkedtünk a korrelációs együttható fogalmával és számítási módjával. A korrelációs
GÖRBE ILLESZTÉS A LEGKISSEBB ÉGYZETEK MÓDSZERÉVEL. Görbe illesztés a legkissebb négyzetek módszerével Az előző gyakorlaton megismerkedtünk a korrelációs együttható fogalmával és számítási módjával. A korrelációs
0-49 pont: elégtelen, pont: elégséges, pont: közepes, pont: jó, pont: jeles
 Matematika szigorlat, Mérnök informatikus szak I. 2013. jan. 10. Név: Neptun kód: Idő: 180 perc Elm.: 1. f. 2. f. 3. f. 4. f. 5. f. Fel. össz.: Össz.: Oszt.: Az elérhető pontszám 40 (elmélet) + 60 (feladatok)
Matematika szigorlat, Mérnök informatikus szak I. 2013. jan. 10. Név: Neptun kód: Idő: 180 perc Elm.: 1. f. 2. f. 3. f. 4. f. 5. f. Fel. össz.: Össz.: Oszt.: Az elérhető pontszám 40 (elmélet) + 60 (feladatok)
Struktúra nélküli adatszerkezetek
 Struktúra nélküli adatszerkezetek Homogén adatszerkezetek (minden adatelem azonos típusú) osztályozása Struktúra nélküli (Nincs kapcsolat az adatelemek között.) Halmaz Multihalmaz Asszociatív 20:24 1 A
Struktúra nélküli adatszerkezetek Homogén adatszerkezetek (minden adatelem azonos típusú) osztályozása Struktúra nélküli (Nincs kapcsolat az adatelemek között.) Halmaz Multihalmaz Asszociatív 20:24 1 A
Tanmenet a évf. fakultációs csoport MATEMATIKA tantárgyának tanításához
 ciklus óra óra anyaga, tartalma 1 1. Év eleji szervezési feladatok, bemutatkozás Hatvány, gyök, logaritmus (40 óra) 2. Ismétlés: hatványozás 3. Ismétlés: gyökvonás 4. Értelmezési tartomány vizsgálata 2
ciklus óra óra anyaga, tartalma 1 1. Év eleji szervezési feladatok, bemutatkozás Hatvány, gyök, logaritmus (40 óra) 2. Ismétlés: hatványozás 3. Ismétlés: gyökvonás 4. Értelmezési tartomány vizsgálata 2
Síkgörbék. 1. Készítsünk elfogadható ábrát a G: t frac(1/t) leképezés gráfjáról. (frac a törtrész függvény, ez a Maple függvénynév is.
 leképezés gráfjáról. (frac a törtrész függvény, ez a Maple függvénynév is.") Síkgörbék 1. Készítsünk elfogadható ábrát a G: t frac(1/t) leképezés gráfjáról. (frac a törtrész függvény, ez a Maple függvénynév is.) 2. (n szirmú virág.) Legyen r(t) = sin(nt), (0 t 2π). Ábrázoljuk polár
Síkgörbék 1. Készítsünk elfogadható ábrát a G: t frac(1/t) leképezés gráfjáról. (frac a törtrész függvény, ez a Maple függvénynév is.) 2. (n szirmú virág.) Legyen r(t) = sin(nt), (0 t 2π). Ábrázoljuk polár
3D Számítógépes Geometria II.
 3D Számítógépes Geometria II. 1. Bevezetés http://cg.iit.bme.hu/portal/3dgeo2 https://www.vik.bme.hu/kepzes/targyak/viiiav16 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki és Informatikai Kar Irányítástechnika
3D Számítógépes Geometria II. 1. Bevezetés http://cg.iit.bme.hu/portal/3dgeo2 https://www.vik.bme.hu/kepzes/targyak/viiiav16 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki és Informatikai Kar Irányítástechnika
Tartalom. Tartalom. Hajder Levente Szakasz raszterizálása. 2017/2018. II. félév. Poligon raszterizáció.
 Tartalom Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév 1 Emlékeztető 2 Vágás 3 Raszterizálás Inkrementális képszintézis Tartalom 1 Emlékeztető Inkrementális
Tartalom Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév 1 Emlékeztető 2 Vágás 3 Raszterizálás Inkrementális képszintézis Tartalom 1 Emlékeztető Inkrementális
Oracle Spatial. Térbeli adatot tartalmazó tábla: Geometry table Legalább 2 oszlopa van: Elsődleges kulcs, SDO_GEOMETRY típusú oszlop.
 Oracle Spatial Az Oracle adatbázis-kezelő rendszer Oracle Spatial (Oracle Locator) nevű kiegészítő modulja támogatja a térbeli adatok kezelését. Térbeli adatot tartalmazó tábla: Geometry table Legalább
Oracle Spatial Az Oracle adatbázis-kezelő rendszer Oracle Spatial (Oracle Locator) nevű kiegészítő modulja támogatja a térbeli adatok kezelését. Térbeli adatot tartalmazó tábla: Geometry table Legalább
Matematikai háttér. 3. Fejezet. A matematika hozzászoktatja a szemünket ahhoz, hogy tisztán és világosan lássa az igazságot.
 3. Fejezet Matematikai háttér A matematika hozzászoktatja a szemünket ahhoz, hogy tisztán és világosan lássa az igazságot René Descartes Számtalan kiváló szakirodalom foglalkozik a különféle differenciálegyenletek
3. Fejezet Matematikai háttér A matematika hozzászoktatja a szemünket ahhoz, hogy tisztán és világosan lássa az igazságot René Descartes Számtalan kiváló szakirodalom foglalkozik a különféle differenciálegyenletek
Fraktálok. Klasszikus fraktálpéldák I. Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék
 Fraktálok Klasszikus fraktálpéldák I Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék TARTALOMJEGYZÉK 1 of 86 Bevezetés. 2 of 86 TARTALOMJEGYZÉK Bevezetés. Az önhasonlóságról intuitív módon Klasszikus
Fraktálok Klasszikus fraktálpéldák I Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék TARTALOMJEGYZÉK 1 of 86 Bevezetés. 2 of 86 TARTALOMJEGYZÉK Bevezetés. Az önhasonlóságról intuitív módon Klasszikus
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 1a. Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki
3D számítógépes geometria és alakzatrekonstrukció 1a. Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki
Egyenletek, egyenlőtlenségek VII.
 Egyenletek, egyenlőtlenségek VII. Magasabbfokú egyenletek: A 3, vagy annál nagyobb fokú egyenleteket magasabb fokú egyenleteknek nevezzük. Megjegyzés: Egy n - ed fokú egyenletnek legfeljebb n darab valós
Egyenletek, egyenlőtlenségek VII. Magasabbfokú egyenletek: A 3, vagy annál nagyobb fokú egyenleteket magasabb fokú egyenleteknek nevezzük. Megjegyzés: Egy n - ed fokú egyenletnek legfeljebb n darab valós
Egy általános iskolai feladat egyetemi megvilágításban
 Egy általános iskolai feladat egyetemi megvilágításban avagy mit kell(ene) tudnia egy 8.-osnak a matematika versenyeken Kunos Ádám Középiskolás pályázat díjkiosztó SZTE Bolyai Intézet 2011. november 12.
Egy általános iskolai feladat egyetemi megvilágításban avagy mit kell(ene) tudnia egy 8.-osnak a matematika versenyeken Kunos Ádám Középiskolás pályázat díjkiosztó SZTE Bolyai Intézet 2011. november 12.
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
8. Egyenletek, egyenlőtlenségek, egyenletrendszerek II.
 8 Egyenletek, egyenlőtlenségek, egyenletrendszerek II Elméleti összefoglaló Az a + b+ c, a egyenletet másodfokú egyenletnek nevezzük A D b ac kifejezést az egyenlet diszkriminánsának nevezzük Ha D >, az
8 Egyenletek, egyenlőtlenségek, egyenletrendszerek II Elméleti összefoglaló Az a + b+ c, a egyenletet másodfokú egyenletnek nevezzük A D b ac kifejezést az egyenlet diszkriminánsának nevezzük Ha D >, az
1. feladatsor, megoldások. y y = 0. y h = C e x
 1. feladatsor, megoldások 1. Ez egy elsőrendű diffegyenlet, először a homogén egyenlet megoldását keressük meg, majd partikuláris megoldást keresünk: y y = 0 Ez pl. egy szétválasztható egyenlet, melynek
1. feladatsor, megoldások 1. Ez egy elsőrendű diffegyenlet, először a homogén egyenlet megoldását keressük meg, majd partikuláris megoldást keresünk: y y = 0 Ez pl. egy szétválasztható egyenlet, melynek
Többváltozós, valós értékű függvények
 Többváltozós függvények Többváltozós, valós értékű függvények Többváltozós függvények Definíció: többváltozós függvények Azokat a függvényeket, melyeknek az értelmezési tartománya R n egy részhalmaza,
Többváltozós függvények Többváltozós, valós értékű függvények Többváltozós függvények Definíció: többváltozós függvények Azokat a függvényeket, melyeknek az értelmezési tartománya R n egy részhalmaza,
Gráfelméleti alapfogalmak-1
 KOMBINATORIKA ELŐADÁS osztatlan matematika tanár hallgatók számára Gráfelméleti alapfogalmak Előadó: Hajnal Péter 2015 1. Egyszerű gráfok Nagyon sok helyzetben egy alaphalmaz elemei között kitűntetett
KOMBINATORIKA ELŐADÁS osztatlan matematika tanár hallgatók számára Gráfelméleti alapfogalmak Előadó: Hajnal Péter 2015 1. Egyszerű gráfok Nagyon sok helyzetben egy alaphalmaz elemei között kitűntetett
1 Lebegőpontos számábrázolás
 Tartalom 1 Lebegőpontos számábrázolás... 2 2 Vektornormák... 4 3 Indukált mátrixnormák és tulajdonságaik... 5 4 A lineáris rendszer jobboldala hibás... 6 5 A kondíciószám és tulajdonságai... 7 6 Perturbációs
Tartalom 1 Lebegőpontos számábrázolás... 2 2 Vektornormák... 4 3 Indukált mátrixnormák és tulajdonságaik... 5 4 A lineáris rendszer jobboldala hibás... 6 5 A kondíciószám és tulajdonságai... 7 6 Perturbációs
1. Generátorrendszer. Házi feladat (fizikából tudjuk) Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak
 Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak") 1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
Számítógépes geometria (mester kurzus)
") 2010 sz, Debreceni Egyetem Csuklós szerkezetek animációja (Kép 1985-b l: Tony de Peltrie) Csontváz-modellek Csuklós szerkezet (robotkar) A robotkar részei: csuklók (joints) rotációs prizmatikus (transzlációs)
2010 sz, Debreceni Egyetem Csuklós szerkezetek animációja (Kép 1985-b l: Tony de Peltrie) Csontváz-modellek Csuklós szerkezet (robotkar) A robotkar részei: csuklók (joints) rotációs prizmatikus (transzlációs)
Numerikus módszerek beugró kérdések
 1. Definiálja a gépi számok halmazát (a tanult modellnek megfelelően)! Adja meg a normalizált lebegőpontos szám alakját. (4 pont) Az alakú számot normalizált lebegőpontos számnak nevezik, ha Ahol,,,. Jelöl:
1. Definiálja a gépi számok halmazát (a tanult modellnek megfelelően)! Adja meg a normalizált lebegőpontos szám alakját. (4 pont) Az alakú számot normalizált lebegőpontos számnak nevezik, ha Ahol,,,. Jelöl:
Mérési adatok illesztése, korreláció, regresszió
 Mérési adatok illesztése, korreláció, regresszió Korreláció, regresszió Két változó mennyiség közötti kapcsolatot vizsgálunk. Kérdés: van-e kapcsolat két, ugyanabban az egyénben, állatban, kísérleti mintában,
Mérési adatok illesztése, korreláció, regresszió Korreláció, regresszió Két változó mennyiség közötti kapcsolatot vizsgálunk. Kérdés: van-e kapcsolat két, ugyanabban az egyénben, állatban, kísérleti mintában,
Függvényhatárérték és folytonosság
 8. fejezet Függvényhatárérték és folytonosság Valós függvények és szemléltetésük D 8. n-változós valós függvényen (n N + ) olyan f függvényt értünk amelynek értelmezési tartománya (Dom f ) az R n halmaznak
8. fejezet Függvényhatárérték és folytonosság Valós függvények és szemléltetésük D 8. n-változós valós függvényen (n N + ) olyan f függvényt értünk amelynek értelmezési tartománya (Dom f ) az R n halmaznak
egyenletrendszert. Az egyenlő együtthatók módszerét alkalmazhatjuk. sin 2 x = 1 és cosy = 0.
 Magyar Ifjúság. X. TRIGONOMETRIKUS FÜGGVÉNYEK A trigonometrikus egyenletrendszerek megoldása során kísérletezhetünk új változók bevezetésével, azonosságok alkalmazásával, helyettesítő módszerrel vagy más,
Magyar Ifjúság. X. TRIGONOMETRIKUS FÜGGVÉNYEK A trigonometrikus egyenletrendszerek megoldása során kísérletezhetünk új változók bevezetésével, azonosságok alkalmazásával, helyettesítő módszerrel vagy más,