Hibrid rendszerek stabilitásvizsgálata és irányítása. PhD tézis. Írta: Rozgonyi Szabolcs. Témavezet : Prof. Hangos Katalin.
|
|
|
- Ida Fábián
- 9 évvel ezelőtt
- Látták:
Átírás
1 Hibrid rendszerek stabilitásvizsgálata és irányítása PhD tézis Írta: Rozgonyi Szabolcs Témavezet : Prof. Hangos Katalin Pannon Egyetem Informatikai Tudományok Doktori Iskola 2011

2

3 1. Motiváció és eredmények Fizikai rendszerek modellezése fontos feladat mind az elméleti tudomány, mind az ipari alkalmazásokon dolgozó kutatók számára. Rendszermodelleket többnyire vagy analízis vagy szintézis (kontrollertervezés) céljából készítünk mérnöki elvek alapján ([1]). Ezek a rendszerek különböz (lineáris, nemlineáris) eszközökkel írhatók le, melyek között is az egyik legfontosabb mód a közönséges dierenciál-egyenletekkel való leírás. Sok alkalmazás megköveteli (a legtöbb ipari alkalmazás ilyen), hogy képesek legyünk leírni egyfajta diszkrét kapcsolású vagy hibrid viselkedést is. Hibrid rendszereknek azokat a dinamikai rendszereket nevezzük, melyek folytonos és diszkrét viselkedést egyaránt mutatnak. Hibrid rendszerek egy nagy osztálya leírható ún. kapcsolt rendszerként, vagyis amikor bizonyos nem sima változókat beágyazunk folytonos részrendszerekbe (lásd [2]), tehát mikor a dinamika leírható szakaszonként (vagy tartományonként) különböz függvényekkel, melyek folytonosak, de nem feltétlenül dierenciálhatók a dinamikák határain. Fontos probléma a hibrid rendszerek stabilitásának vizsgálata. Léteznek eljárások, melyekkel eldönthet, hogy egy adott folytonos vagy diszkrét rendszer stabil-e, de hibrid rendszerek vonzási tartományát nem könny megtalálni. Bonyolult esetekben sokszor csak szimulációval térképezhet fel egy adott egyensúlyi pont valamely környezete. A jelen disszertációban nemlineáris autonóm rendszerek vonzási tartományának (DOA, Domain of Attraction) becslésére adok módszert. A bemutatott módszer Vanelli és Vidyasagar eljárásának (lásd [3]) javítása. A módszer egy speciális Ljapunov-függvénynek (ún. maximális Ljapunovfüggvénynek) a becslésén alapszik. Továbbá a Paksi Atomer m reaktormodelljének vonzási tartományát is megbecsültem két különböz m ködési módban, mely során kiderült, hogy a tekintett részrendszer a vonzási tartományon belül üzemel. Szakaszonként vagy tartományonként deniált folytonos rendszerekre is kiterjesztettem a javított Vanelli-Vidyasagar-féle módszert, valamint tisztán analitikai eszközökkel meghatároztam a Paksi Atomer m hibrid reaktor-modelljének vonzási tartományát. Másik fontos feladat a hibrid rendszerek irányítása. Jelen disszertációban egy esettanulmányt mutatok egy egyszer hibrid rendszermodellhez való kontroller tervezésére többparaméteres programozási technika alkalmazásával (lásd [4]). A különböz kontrollertervezési paraméterek hatását is megvizsgáltam mind a komplexitásra, mind a teljesít képességre vonatkozóan. A tekintett rendszer a hibrid rendszerek egy részosztályából való, amikor a bemeneti változók értékkészlete egy véges halmaz Jelölések A szövegben használt jelöléseket és rövidítéseket az 1. és a 2. táblázatban foglaltuk össze. 2. A DOA becslése nemlineáris autonóm rendszerekre A következ kben közönséges dierenciál-egyenletek alábbi alakját tekintjük: ẋ = f (x), (1) ahol f : R n R n folytonos. Továbbá feltesszük, hogy minden x R n esetén létezik egy egyértelm megoldás φ (t, x), melyre igaz, hogy φ (0, x) = x. Ekkor a megoldás egyértelm ségéb l következik, hogy φ (t 1, φ (t 2, x)) = φ (t 1 + t 2, x) bármely t 1, t 2 R esetén, ahol φ : R R n R n mindkét argumentumában folytonos függvény (lásd [5]). Megjegyezzük, hogy a φ (t, x)-re említett feltételek igazak, ha f Lipschitz-folytonos, azaz létezik egy olyan pozitív k, hogy f (x) f (y) k x y (lásd [6]). 1. Deníció. Az origó vonzási tartományán (DOA) az alábbi halmazt értjük: A = { x 0 : x (t, x 0 ) 0, t }, (2) ahol x(t, x 0 ) jelöli (1) megoldását az x(0) = x 0 kezdeti feltétellel. 3
, hogy képesek legyünk leírni egyfajta diszkrét kapcsolású vagy hibrid viselkedést is.")
4 Jelölés - Jelentés A - mátrix vagy halmaz A - az A mátrix transzponáltja A 0 - az A mátrix pozitív szemi-denit A 0 - az A mátrix pozitív denit I - egységmátrix c - c vektor transzponáltja u (t), or u - a rendszer bemenete y (t), or y - a rendszer kimenete ẋ = dx dt - az x változó id szerint deriváltja f(x) x i - az f(x) i-edik parciális deriváltja x - az x gradiensvektora P (A) - az A halmaz hatványhalmaza I (A) - az A halmaz belseje Ā - az A halmaz lezártja A - az A halmaz határa x l - az x vektorl-normája, ahol l lehet 1, 2 vagy R nemnegatív valós számok N - természetes számok halmaza (a 0-t is beleértve) 1. táblázat. A felhasznált jelölések és jelentéseik rövidítés jelentés ODE - közönséges dierenciál-egyenlet (ordinary dierential equation) PWA - szakaszonként an (piecewise ane) DOA - vonzási tartomány (domain of attraction) MPT - többparaméteres programozási technika (multi-parametric programming technique CFTOC - megszorított véges idej optimális vezérlés (constrained nite time optimal control) 2. táblázat. Rövidítések és jelentéseik 4
 1. táblázat.")
5 2. Deníció. Azt mondjuk, hogy a V pozitív denit függvény az origó egy U környezetében Ljapunov-függvény az (1) rendszerhez, ha V (x) = ( V (x)) f (x) = f (x) f (x) cos (θ) 0 bármely x U \ {0} esetén, ahol θ az f (x) és V (x) vektorok által bezárt szög. Ha V (x) < 0 az összes x U \ {0} pontra, akkor a V függvényt szigorú értelemben vett Ljapunov-függvénynek nevezzük. Ismert tény, hogy ha létezik is Ljapunov-függvény egy autonóm ODE esetén, akkor az nem egyértelm. A következ kben bevezetjük az A halmazon értelmezett, ún. maximális Ljapunovfüggvény fogalmát, ahol A jelöli az aszimptotikusan stabil origó vonzási tartományát. 3. Deníció. Azt mondjuk, hogy a V M : R n R + 0 (1) rendszernek, ha függvény maximális Ljapunov-függvénye az V M (0) = 0, V M (x) > 0, x A\ {0} V M (x) < pontosan akkor, ha x A V M negatív denit az A halmazon és V M (x) as x A és/vagy x, ahol A jelöli az (1) rendszer aszimptotikusan stabil origójának a DOA-ját. A következ tétel (lásd [3]) alapozza meg a DOA-becsl algoritmust. 4. Tétel. Tegyük fel, hogy található egy olyan B R n halmaz, melynek az origó bels pontja, valamint egy olyan folytonos V : B R + 0 és egy pozitív denit ψ : Rn R + 0 függvény úgy, hogy V (0) = 0 és V (x) > 0 az összes x B\ {0} esetén, V (φ(t,x0)) V (x0) t a V (x 0 ) = lim t 0 + függvény jól deniált az összes x B pontra, valamint igaz, hogy V (x) = ψ (x), x B és V (x) ha x B és/vagy x. Ekkor B = A. Tegyük fel, hogy az f függvény kifejezhet Taylor-sor alakban, azaz ẋ = f (x) = F i (x), (3) ahol az F i, i 1 függvények i-edfokú homogén függvények (pl. monomiálisok). Legyen F 1 (x) = Φx, Φ R n n, ahol Φ az f Jacobi-mátrixa az x = 0 helyen. Továbbá a kés bbi kifejezések rövidítése kedvéért legyen F i (x) = 0, ha i 0. A maximális Ljapunov-függvény tulajdonságait alapul véve keresünk egy olyan V M függvényt és egy pozitív denit ψ függvényt, hogy V M (0) = 0 igaz, valamint i=1 V M (x) = ψ (x) (4) is teljesül az origó valamely környezetében úgy, hogy a A halmaz deniált a V M (x) reláció által. A Ljapunov-jelölt függvénynek tehát minden határon túl kell n nie, ahogy x egyre közelebb kerül az A halmaz határához vagy ahogy x. Ha lehetséges lenne felírni a V M (x) = N(x) D(x) alakot, ahol N (x) és D (x) polinomok, akkor A adott lenne a D (x) = 0 relációval. Ez a konstrukció a következ alul-határozott lineáris egyenlet-rendszerhez vezet: E m y = b m, (5) ahol E m -ek megfelel méret mátrixok, az y vektor pedig a homogén R i és Q i függvények együtthatóiból adódik. 5

6 Keressünk tehát olyan R m és Q m 2 homogén függvényeket (ahol m 3), hogy az R i és Q i együtthatói a V m -ben oldják meg a következ, (5)-b l adódó minimalizálási problémát: min e m (y) úgy, hogy E m (y) = b m, (6) ahol e m (y) a V m -ben lév, m + 1-nél nagyobb fokszámú tagok együtthatóinak euklideszi normája. LaSalle invariáns halmazokról szóló tétele ([7]) alapján választható egy olyan legnagyobb (és pozitív) C, hogy a következ A becslés szinthalmaz A becslés = { x : V m (x) < C } (7) benne van az Ω halmazban, ahol Ω = { x : V } m (x) 0. (8) Amint a kívánt pontosságot elértük (e m (y ) = 0 adott y -ra) vagy pedig a hiba elkezd n ni, az iterációs lépésekben meg kell állni. Ha valamely y és m esetén e m (y ) = 0, akkor a vonzási tartomány határa pontosan meghatározott a D (x) = 0 relációval, azaz A = { x : m 2 i=1 Q i (x) > 1 }. (9) Az algoritmus el nye, hogy a felhasználónak nem kell ismernie a rendszer megoldásait különböz kezdeti értékekre, elég egy lineáris programozási feladatot megoldani minden lépésben. Továbbá az eljárás sokkal szélesebb rendszerosztályra is alkalmazható, mint a rendelkezésre álló egyéb módszerek többsége (melyek f leg polinomiális rendszerekre vonatkoznak). 3. Nemlineáris hibrid rendszerek DOA-ja Tekintsük a következ alakban tartományonként deniált hibrid rendszereket: x i = f i (x), (10) ahol f i R n R n deniálja a rendszert az állapottér véges számú különböz tartományán úgy, hogy egy pont sem tartozik több tartományba, azaz f (x) = f i (x), x X i dom (f i ), i m = {1, 2,..., m} és i m X i = X úgy, hogy X i X j =, i j m. A különböz dinamikatartományok (X i, i m) határát B I -vel jelöljük, ahol B I = { X i X j, i j I }, ahol { i 1, i 2,..., i l } = I P ( m) jelöli a kérdéses tartományok indexeit. Ezek alapján az összes tartomány határa a következ módon adott: B = B m A Vanelli-Vidyasagar-algoritmus kiterjesztése szakaszonként deniált hibrid rendszerekre Jelölje az ẋ = f i (x) részrendszer origójának DOA-ját A i. Megjegyzend, hogy A i -t nem sz kítettük X i -re, tehát arra a tartományra, ahol az adott részrendszer aktív, azaz igaz, hogy A i dom (f i ). Ahhoz, hogy megkeressük a rendszer A DOA-ját, f-nek a következ feltételeket kell kielégítenie: 1. Legyen f folytonos, 2. legyen f i (0) = 0 i m, vagyis az összes részrendszer esetén az origó egyensúlyi pont, 3. legyen 0 I ( i m A i ), 4. legyen f Lipschitz-folytonos, ami a Lagrange-tétel következtében mindig igaz, ha f i folytonos X i -n bármely i m esetén (valamint folytonosak az 1. pont miatt). 6
![LaSalle invariáns halmazokról szóló tétele ([7]) alapján választható egy olyan legnagyobb (és pozitív) C, hogy a következ A becslés szinthalmaz A becslés = { x : V m (x) < C } (7) benne van az Ω](/docs-images/52/13045926/images/page_6.jpg "halmazban, ahol Ω = { x : V } m (x) 0. (8) Amint a kívánt pontosságot elértük (e m (y ) = 0 adott y -ra) vagy pedig a hiba elkezd n ni, az iterációs lépésekben meg kell állni.")
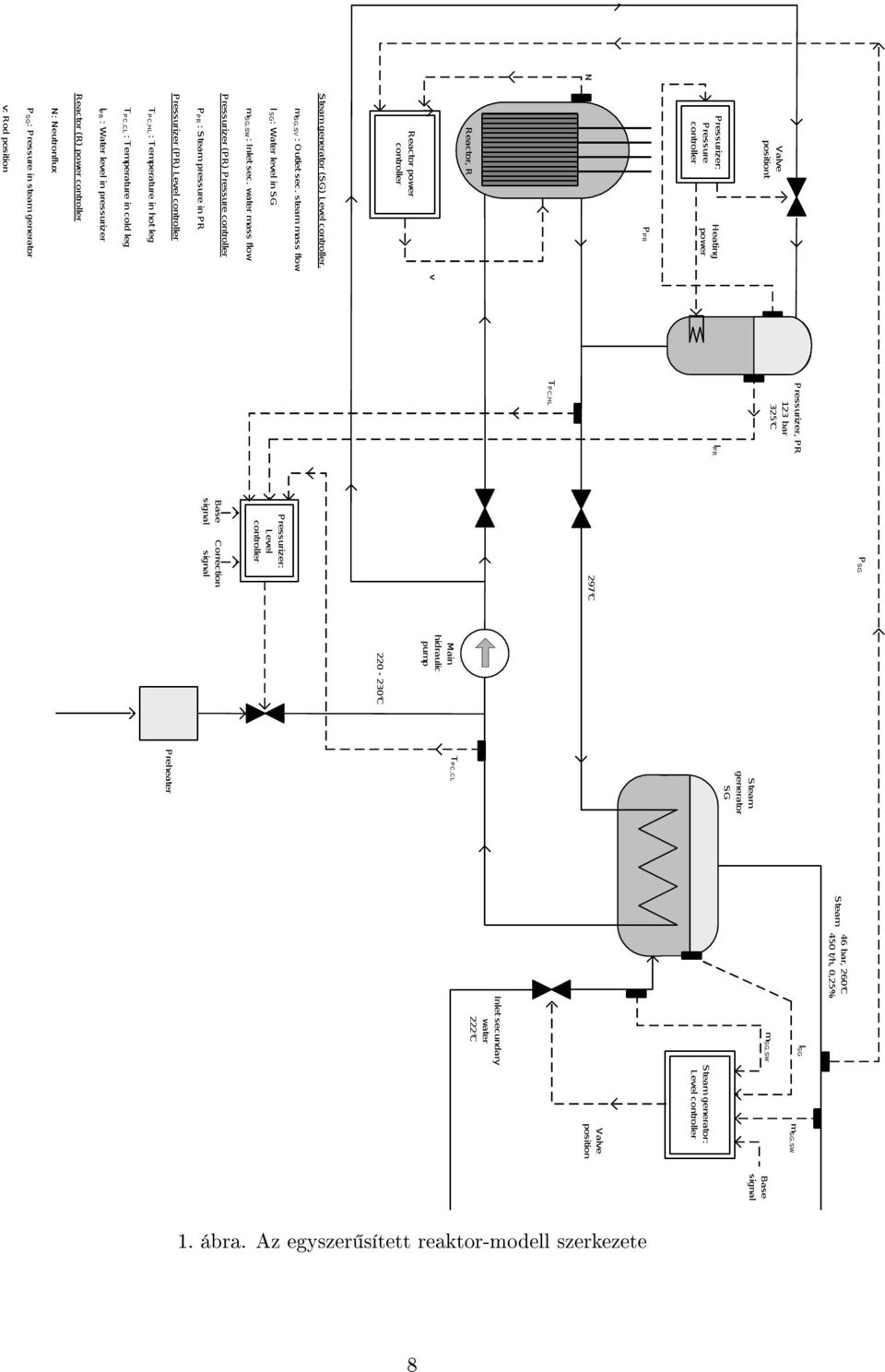
7 5. Ahhoz, hogy a Mathematica-ban implementált algoritmust közvetlenül alkalmazhassuk, f- nek dierenciálhatónak kell lennie az origó valamely környezetében. Az (1)-(5) feltételekb l látható, hogy ha f folytonosan dierenciálható az origó egy környezetében, vagy az origó eleme a I ( i m X i ) halmaznak, akkor a javított Vanelli-Vidyasagar-algoritmus (és annak Mathematica-beli implementációja) alkalmazható az f által meghatározott rendszerre. A következ tétel alapján módszert kapunk, hogy hogyan becsüljük meg a legnagyobb szinthalmazt (lásd a (7)-es egyenletet). 5. Állítás. Tekintsük az ẋ = f i (x) részrendszert az origóval, mint egyensúlyi ponttal. Legyen ɛ i > 0 úgy, hogy az S [ɛ i ] gömbkörnyezet kompakt részhalmaza I (A i )-nak és deniáljuk továbbá a h i (ɛ) = min { V i (x) : x H (ɛ) } függvényt, ahol V i a V M lesz kítése X i -re. Tehát igaz, hogy 0 < h i (ɛ i ). Ha választunk egy olyan α i -t, hogy 0 < α i < h i (ɛ i ), akkor P αi = K αi S [ɛ i ] kompakt és pozitív invariáns részhalmaza A i -nek, ahol K αi = { x A i : V i (x) α i } az α i -hez tartozó szinthalmaza a V i Ljapunov-függvénynek. A fenti állítást felhasználva a következ módon keressük a legnagyobb szinthalmazt: 6. Algoritmus. Válasszunk az origónak egy olyan H (r) környezetét, melynek van nem üres metszete A-val. El ször válasszuk ki azt a legnagyobb r > 0 értéket úgy, hogy (H (r) B) ( i m A i B), ami lehetséges, mivel X lokálisan kompakt halmaz. Következ lépésként keressük a maximális C i értéket V i -hez a A i X i S[r] halmazon (ez a C i lesz C a (7) egyenletben), így tehát megkonstruáltuk az i m { x A i X i : V i (x) C i } A halmazt. A fenti algoritmus megalkot egy közös Ljapunov-függvényt a rész-dinamikák egyedi Ljapunovfüggvényeib l, valamint konzervatív (u.i. az algoritmus csak gömbkörnyezeteket tekint), de jól algoritmizálható módon módszert ad a DOA megbecslésére A hibrid reaktor-modell DOA-jának meghatározása Egy másik megközelítést alkalmazva, tisztán analitikai eszközökkel határoztam meg a DOA-ját egy fontos és létez ipari rendszernek, a Paksi Atomer m primer körének. Az 1. ábra mutatja az er m különböz egységeit és azok összeköttetéseit, melyek az egyszer - sített modellben szerepet játszanak. A kényelmesebb jelölésmód kedvéért a változókat a következ rövidítéseknek megfelel en indexeljük: R reaktor PC primer kör PR nyomáskiegyenlít tartály SG g zfejleszt Megmaradási egyenletek Az els dinamikai egyenlet a primer köri folyadék h mérsékletét írja le: dt P C dt = W R 6KSG T (T P C TSG ) W P loss C M P C c p, (11) P C ahol TSG a g zfejleszt konstans nominális értéke, W R a reaktor teljesítménye, KSG T a primer kör és a g zfejleszt közötti h átbocsátási tényez, WP loss C a primer köri h veszteség, M P C a primer köri folyadék tömege, c p P C a fajh je 282 C-on. A második egyenlet a nyomáskiegyenlít h mérsékletének dinamikáját írja le: dt P R dt = h (W R) WP loss R + W P heat R cp P R m P R (W R ) T P R M P R c p P R, (12) ahol WP loss heat R a h veszteség, WP R a f t teljesítmény, cp P R a víz fajh je 282 C-on és h (W R ) pedig a hibrid viselkedést leíró egyenlet (lásd a (17)-es egyenletet lentebb), ami a ki/bementi tömegáramtól (m P R (W R )) függ. 7
-es egyenletet). 5. Állítás.")
8 1. ábra. Az egyszer sített reaktor-modell szerkezete 8
9 Algebrai kiegészít egyenletek A reaktor W R teljesítménye arányos az N neutron-uxussal: ahol c ψ egy adott konstans. A PR-beli folyadék tömege a következ : M P R = M P C V 0 P C W R (v) = c ψ N (v) (13) ( c ϕ0 + c ϕ1 TP C + c ϕ2 TP C 2 ), (14) ahol M P C a PC-beli víz tömege, V 0 P C a nominális térfogata, TP C a h mérséklete Celsiusban, c ϕ0, c ϕ1 és c ϕ2 pedig konstansok. A PR f t teljesítményének irányítását egy P-szabályzó végzi, melynek er sítési tényez je K P R : W heat P R = W loss P R K P R (T P R T P R), (15) ahol TP R a referencia-h mérséklet PR-ben. A ki/bemeneti tömegáram az M P R id beli deriváltjaként számolódik: m P R (W R ) = VP 0 C (c ϕ1 + 2T P C c ϕ2 ) dt P C, (16) dt ahol c ϕ1 és c ϕ2 konstansok (lásd [8]). A hibrid viselkedést a W R -t l való függés okozza a következ módon: { c p P C h(w R ) = m P R (W R ) T hotleg P C for m P R (W R ) > 0 c p P R m P R (W R ) T P R otherwise (17) ahol T hotleg P C = T P C + 15 a forró ágbeli víz h mérséklete. A DOA-analízis céljára való kétváltozós autonóm hibrid rendszer megalkotását a DOA tisztán analitikai módszerekkel való meghatározása követte. Megmutattam, hogy a szabályozott (visszacsatolt) rendszer m ködési tartománya bármely pozitív visszacsatolási értékre részhalmaza a DOA-nak. Továbbá megmutattam azt is, hogy ezen tényez értéke milyen hatással van a rendszer dinamikájára, majd ezt felhasználva meghatároztam a gyakorlatban alkalmazható visszacsatolási tényez k értékeit. 4. Többparaméteres programozás alkalmazása diszkrét inputhibrid rendszerek szabályozótervezésére Ebben a fejezetben a hibrid rendszerek egy másik aspektusát vizsgálom. A feladat ezúttal nem a DOA meghatározása, hanem kontrollertervezés. A szabályzótervezésre kiválasztott rendszer egy hibrid rendszer, a Paksi Atomer m nyomáskiegyenlít tartályának modellje. A kontroller a tartályban lev nyomást tartja egy konstans értéken úgy, hogy a bemenet lehetséges értékeit egy véges halmazból választja. A vizsgált rendszer a hibrid rendszerek egy speciális részosztályába tartozik: ezen rendszerek állapotváltozói folytonosak, a bemeneti értékei diszkrétek, szakaszonként konstansok és csak véges sok értékük lehet. Azonban lehetséges szabályozót tervezni rájuk többparaméteres programozási feladat (lásd [4] és [9]) megoldásával. Egy esettanulmány keretében bemutatom a szabályozótervezés folyamatát egy egyszer hibrid rendszeren. Az adott feladatra (az er m hibrid részrendszere) alkalmazott eszköz (MPT) felhasználása új volt az eredmények publikálásakor ([10]). 9
, (15) ahol TP R a referencia-h mérséklet PR-ben.")
10 4.1. Rendszerleírás Az egyszer sített modell két energia-megmaradási egyenletet tartalmaz, egyiket a víz, másikat a fal térfogatára értelmezve. Víz-energia egyenlet: du dt = c pmt I c p mt + K W (T W T ) + 4 χ i W HEi, (18) ahol U a víz bels energiája, c p a fajh, m a víz tömegárama, T I és T a betáplált és a már bent lév víz h mérséklete, K W a h átbocsátási tényez, T W a fal h mérséklete, W HEi a f t teljesítmény és χ i a karakterisztikus változója az i-edik f t egységnek. Fal-energia egyenlet: du W = K W (T T W ) W loss, (19) dt ahol U W a fal bels energiája, W loss pedig az összes energiaveszteség egységid alatt. A következ egyenletetek kapcsolatot határoznak meg a bels energiák (U és U W ), valamint a megfelel h mérsékletetek (T és T W ) között, valamint megadják a p nyomás vízh mérséklett l való függését: i=1 U = c p MT (20) U W = C pw T W (21) p = p (T ) = e p(t ), (22) ahol p (T ) egy adott harmadrend polinom, M a víz tömege és C pw = c pw M W a fal h kapacitása: p (T ) = T T T 3. A modellparaméterek becslése nem része a dolgozatnak, részletei megtalálhatók [11]-ben, valamint a 3. táblázatban. Az állapottér-modell minden lehetséges esetre külön tekinthet, ami azt jelenti, hogy a rendszer a H i állapotban van pontosan akkor, amikor i darab f t egység van bekapcsolt állapotban Szabályozótervezés A zikai modell és a szabályozó úgy lettek megalkotva, hogy a tartály bels nyomását (a T h mérsékleten keresztül) egy sz k sávban tartsa a f t egységek ki- és bekapcsolásával. Az MPT nev Matlab-toolboxot (lásd [9]) használtam a szabályozó megtervezéséhez. El ször a folytonos idej modellb l egy diszkrét idej t származtattam: [ ] x1 (k + 1) x 2 (k + 1) = Φ y(k) = C [ ] x1 (k) x 2 (k) [ ] x1 (k), x 2 (k) + Γu (k) + Θ ahol Φ = e Aτ, Γ = ΞB, Θ = Ξf, ahol Ξ = A 1 (Φ I) és τ a mintavételezési id másodpercben. A megtervezett szabályozó végeredményképpen egy poliéderek halmazán értelmezett PWA szabály a következ alakban: U (k) = F r i x (k) + G r i, (24) ahol r jelöli azt az aktív poliédert a { R r } Z r=1 halmazból. Az aktív dinamikát i jelöli, mely a vizsgált rendszer esetén mindvégig konstans 1. Az x (k) állapothoz tartozó J költségfüggvényt a következ formula határozza meg: (23) J = x (k) A r i x (k) + B r i x (k) + C r i, (25) 10
 W loss, (19) dt ahol U W a fal bels energiája, W loss pedig az összes energiaveszteség egységid alatt.")
11 ahol az Fi r, Gr i, Ar i, Br i, Cr i mátrixok és a poliéderek { R r } Z r=1 halmaza a CFTOC-probléma megoldásaként adódnak. Egy rögzített N predikciós távolsághoz tartozó kontroll-probléma megoldása után az (24) szabály kiértékeléseként adódó bemenet minimalizálja J-t. Zárt kör szabályozás esetén u (0)-nak csak ez els elemét alkalmazzuk bemenetként, majd újraszámoljuk a teljes U (k)-t, hogy ismét csak az els elemét alkalmazzuk a kapott vektornak. Ez az ún. hátráló horizont módszer (RHC, Receding Horizon Policy). Normák Diszkrét bemenet rendszerekre a CFTOC-probléma megoldása l = 2 esetén nagyon lassú, továbbá a nyomáskiegyenlít tartály modelljének esetén a szimulációk során még N = 5 predikciós távolság esetén sem sikerült elérni a referencia-pontot a visszacsatolt rendszerrel. Lineáris normák tekintetében a vizsgált rendszer esetén gyakorlatilag lényegtelennek bizonyult, hogy melyiket alkalmazzuk (l = 1 vagy l = ). Mérnöki megfontolásból mégis a -normát választottam, mert a legmagasabb h mérsékletnek van nagyobb jelent sége, mintsem a h mérsékletek összegének. Mintavételezési id A mintavételezési id megválasztásának nagy hatása van a szabályozóra. Minél kisebbre választjuk, a folytonos idej rendszer diszkrét idej vel való közelítése annál pontosabbá válik, másrészt ahogy a az id beli felbontás növekszik, a kontroller összetettsége is növekedési tendenciát mutat. Továbbá a nyomáskiegyenlít re τ kis értékei esetén a kontroller a szimulációk során ugyancsak nem tudta elérni a kívánt referencia-pontot. Tekintettel arra, hogy a rendszer id állandója órás nagyságrendben van, a τ = 60 mérnöki szempontból is megfelel választás és még nem vezet nagy bonyolultságú kontrollerhez. Amennyiben a mintavételezési id kisebb kb. 20-nál, az eredményül adódó kontrollerrel a visszacsatolt rendszer nem képes a referencia-értéket elérni, az összes f t egység kikapcsolt állapotban marad, így végül az egész rendszer kih l a h veszteség miatt. τ = 30 esetén N = 5-tel a kontroller elfogadható módon m ködik, bár eredményül 321 db. poliédert kapunk, mely er forrás-igényessé teszi az alkalmazását. τ = 60 esetén N = 4-gyel a nagyon jó eredményeket kapunk 258 db. poliéderrel. τ = 60 esetén N = 3-mal szintén jó eredményeket kapunk, mindösszesen 41 db. poliéderrel. Ezek alapján a gyakorlati alkalmazáshoz ez a kombináció bizonyult a legmegfelel bbnek. Predikciós távolság A predikciós távolság (mértékegysége egy mintavételezési egység) hosszának nagy hatása van a kapott kontroller bonyolultságára, vagyis az eredményül kapott poliéderek számára (lásd a (2). ábrát), azonban minél hosszabb, annál jobb lesz a kontroll min sége is. Az alábbi táblázat összehasonlítást ad a poliéderek számának függésére a predikciós távolságtól és a mintavételezési id t l (l = esete). N poliéderek száma, τ = poliéderek száma, τ = poliéderek száma, τ = Megismételve az el z bekezdés megállapításait: N = 3 jó kompromisszum a kontroller követési min sége és a bonyolultság között. 11
.")
12 (a) Poliéderek száma 1-norma esetén (b) Poliéderek száma -norma esetén 2. ábra. A kontroller poliédereinek száma (Z) különböz τ és N értékekre jelölés érték mértékegység leírás c p J/kg/K víz fajh je ρ 654 kg/m 3 víz s r sége 325 C-on W HEi W f t egységek teljesítménye M kg tartályban lev víz tömege C pw J/K a fal h kapacitása K W W/K a fal h átbocsátása T I 267 C befolyó víz h mérséklete W loss W h veszteség 3. táblázat. Modellparaméterek 12

13 5. Új tudományos eredmények Az új eredményeket a következ tézisekben foglaljuk össze. 1. tézis. DOA becslése nemlineáris autonóm rendszerekre (3. fejezet) ([R2],[R3],[R4]) Nemlineáris autonóm rendszerek aszimptotikusan stabil origójának vonzási tartományára szolgáló Vanelli és Vidyasagar algoritmusát javítottam, majd implementáltam Mathematica-ban. Az algoritmus egy becsült maximális Ljapunov-függvény konstruálásán keresztül ad közelítést a DOA-ra. Az eljárás el nye, hogy a becsléshez nincs szükség a rendszer megoldásainak ismeretére az origó környezetében, hanem elég minimalizálási feladatok egy sorozatát végrehajtani. Az algoritmus tetsz leges (véges) dimenziós rendszeren alkalmazható, amennyiben megfelel a szükséges simasági feltételeknek. A (7)-es egyenletben szerepl C értékének automatikus számítása esetén a DOA az origó egy alkalmasan választott gömb-környezetében lesz, ami az automatikus módszert konzervatívvá teszi. A kidolgozott algoritmust egy iparilag releváns rendszeren alkalmaztam, a Paksi Atomer m két részrendszerén. Az egyik a neutronuxussal (N) visszacsatolt primer kör, a másik a g zfejleszt. Azt találtam, hogy az algoritmussal meghatározott DOA nagy pontossággal egybeesik a szimulációkkal meghatározott DOA-val. 2. tézis. Nemlineáris hibrid rendszerek DOA-jának becslése (4. fejezet) ([R5],[R6],[R7]) Két különböz módon vizsgáltam két különböz hibrid, tartományonként másként deniált rendszer DOA-ját. Az els módszer az els tézisben adott algoritmus felhasználásával képes a tartományonként deniált hibrid rendszerek DOA-jának becslésére, amennyiben a dinamika folytonos a különböz dinamika-tartományok határán. Az eljárás iteratív módon közelít egy közös maximális Ljapunov-függvényt racionális tört-alakban. A módszer része a kifejlesztett Mathematica-csomagnak. A második esetben egy fontos és iparilag releváns hibrid rendszernek, a Paksi Atomer m primer körének DOA-ját határoztam meg tisztán analitikai eszközökkel. Két dimenziós autonóm hibrid dierenciál-egyenlettel leírt modellt fejlesztettem ki az irodalomban megtalálható modell-egyenleteket felhasználva az er m visszacsatolt primer köréhez. A vizsgálat során kiderült, hogy a rendszer DOA-ja magában foglalja a m - ködési tartományt bármely pozitív visszacsatolási értékre. Továbbá megvizsgáltam az er sítési tényez hatását a szabályzott rendszer dinamikájára és ezekre találtam egy, a gyakorlatban is használható értékhalmazt. 3. tézis. Többparaméteres programozás alkalmazása diszkrét input-hibrid rendszerek szabályozótervezéséhez (5. fejezet) ([R4]) Szabályozótervezési céllal alkottam egy egyszer, tartományonként an állapottér-modellt és a feladathoz tartozó CFTOC-probléma Matlab-ban való megoldásával szabályozót terveztem hozzá. Vizsgálat alá kerültek továbbá a szabályozótervezés paraméterei a kész kontroller teljesítménye és komplexitása szempontjából. Egy iparilag releváns esettanulmány keretében egy egyszer sített kétváltozós modellhez terveztem kontrollert. A modell a Paksi Atomer m nyomáskiegyenlít tartályának hibrid modellje, melynek bemenetei csak egy véges halmazból választhatók. A szabályozót a hozzá tartozó CFTOC-probléma megoldásával készítettem többparaméteres programozási technika alkalmazásával. A kontrollertervezési paraméterek vizsgálata során kiderült, hogy a mintavételezési id és a predikciós távolság a két legfontosabb paraméter, melyek közül az el bbib l kívánatos minél hosszabbat választani, az utóbbiból minél rövidebbet. A normák közül a lineáris normák választása bizonyult kielégít nek. 13

14 6. Publikációk A disszertáció eredményeihez kapcsolódó publikációk listája a következ : [R1] Sz. Rozgonyi, K. M. Hangos, Hybrid modelling and control of an industrial vaporizer, Proceedings of the 15th International Conference on Process Control, Slovakia, 2005., [R2] Sz. Rozgonyi, K. M. Hangos, Improved estimation method of region of stability for nonlinear autonomous systems, Proceedings of the 7th International PhD Workshop, Czech Republic, 2006., ISBN: , pp [R3] Sz. Rozgonyi, K. M. Hangos, G. Szederkényi, Estimating the stability region of a controlled pressurized water reactor, Proceedings of the 8th International Conference on The Modern Information Technology in the Innovation Processes of the Industrial Enterprises, Budapest, 2006., pp [R4] Sz. Rozgonyi, K. M. Hangos, G. Szederkényi, Improved estimation method of region of stability for nonlinear autonomous systems, Research Report, SCL-002/2006, Systems and Control Laboratory, Computer and Automation Research Institute, 2006., [R5] Sz. Rozgonyi, K. M. Hangos, Estimating the region of stability for a hybrid model, Proceedings of the 16th International Conference on Process Control, Slovakia, On CD: 012s.pdf [R6] Sz. Rozgonyi, K. M. Hangos, G. Szederkényi, Determining the domain of attraction of hybrid non-linear systems using maximal Lyapunov functions, Kybernetika 46 (1) (2010) 1937, IF:0.461 [R7] Sz. Rozgonyi, K. M Hangos, Domain of attraction analysis of a controlled hybrid reactor model, Annals of Nuclear Energy 38 (5) (2011) , IF:
![sk/pc05/data/index_papers.html#r [R2] Sz. Rozgonyi, K. M.](/docs-images/52/13045926/images/page_14.jpg "Hangos, Improved estimation method of region of stability for nonlinear autonomous systems, Proceedings of the 7th International PhD Workshop, Czech Republic, 2006., ISBN:80-903834-1-6, pp.")
15 Hivatkozások [1] K. M. Hangos, I. T. Cameron, Process Modelling and Model Analysis, Academic Press, London, [2] H. Schumacher, A. van der Schaft, An Introduction to Hybrid Dynamical Systems, Springer- Verlag, [3] A. Vanelli, M. Vidyasagar, Maximal Lyapunov functions and domains of attraction for autonomous nonlinear systems, Automatica 21 (1985) URL [4] F. Borelli, Discrete time constrained optimal control, Ph.D. thesis, Swiss Federal Institite of Technology, Zurich (2002). [5] E. A. Coddington, N. Levinson, Theory of ordinary dierential equations, McGill-Hill Book Company, New York, Toronto, London, [6] N. P. Bhatia, G. P. Szeg, Stability Theory of Dynamical Systems, Springer-Verlag, [7] J. P. LaSalle, S. Lefschetz, Stability by Lyapunov's direct method with applications, Academic Press, New York, [8] C. Fazekas, G. Szederkényi, K. Hangos, A simple dynamic model of the primary circuit in VVER plants for controller design purposes, Nuclear Engineering and Design 237 (2007) doi: /j.nucengdes [9] M. Kvasnica, P. Grieder, M. Baoti, M. Morari, Multi parametric toolbox (mpt), in: Hybrid Systems: Computation and Control, Vol of Lecture Notes in Computer Science, Springer Verlag, Philadelphia, Pennsylvania, USA, 2004, pp , [10] S. Rozgonyi, K. M. Hangos, Hybrid modelling and control of an industrial vaporizer, in: Proceedings of the 15th International Conference on Process Control, Slovakia, [11] K. Hangos, Z. Bordács, Modelling and identication of an industrial pressurized water tank (in hungarian), Tech. rep., Computer and Automation Research Institute, Budapest, Hungary (2004). 15
![Vidyasagar, Maximal Lyapunov functions and domains of attraction for autonomous nonlinear systems, Automatica 21 (1985) 6980. URL http://citeseer.ist.psu.edu/context/507042/0 [4] F.](/docs-images/52/13045926/images/page_15.jpg "Borelli, Discrete time constrained optimal control, Ph.D. thesis, Swiss Federal Institite of Technology, Zurich (2002). [5] E. A. Coddington, N.")
LTI Rendszerek Dinamikus Analízise és Szabályozásának Alapjai
 Diszkrét és hibrid diagnosztikai és irányítórendszerek LTI Rendszerek Dinamikus Analízise és Szabályozásának Alapjai Hangos Katalin Közlekedésautomatika Tanszék Rendszer- és Irányításelméleti Kutató Laboratórium
Diszkrét és hibrid diagnosztikai és irányítórendszerek LTI Rendszerek Dinamikus Analízise és Szabályozásának Alapjai Hangos Katalin Közlekedésautomatika Tanszék Rendszer- és Irányításelméleti Kutató Laboratórium
Fizikai alapú közelítő dinamikus modellek
 P C R G Fizikai alapú közelítő dinamikus modellek a Paksi Atomerőmű primerkörével kapcsolatos feladatokra Hangos Katalin Folyamatirányítási Kutató Csoport MTA SzTAKI Publikációs Díjazottak Előadása 2006
P C R G Fizikai alapú közelítő dinamikus modellek a Paksi Atomerőmű primerkörével kapcsolatos feladatokra Hangos Katalin Folyamatirányítási Kutató Csoport MTA SzTAKI Publikációs Díjazottak Előadása 2006
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 1.
 1.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 1. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 1. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Irányítási struktúrák összehasonlító vizsgálata. Tóth László Richárd. Pannon Egyetem Vegyészmérnöki és Anyagtudományok Doktori Iskola
 Doktori (PhD) értekezés tézisei Irányítási struktúrák összehasonlító vizsgálata Tóth László Richárd Pannon Egyetem Vegyészmérnöki és Anyagtudományok Doktori Iskola Témavezetők: Dr. Szeifert Ferenc Dr.
Doktori (PhD) értekezés tézisei Irányítási struktúrák összehasonlító vizsgálata Tóth László Richárd Pannon Egyetem Vegyészmérnöki és Anyagtudományok Doktori Iskola Témavezetők: Dr. Szeifert Ferenc Dr.
Kétdimenziós mesterséges festési eljárások. Hatások és alkalmazások
 Pannon Egyetem Informatikai Tudományok Doktori Iskola Tézisfüzet Kétdimenziós mesterséges festési eljárások. Hatások és alkalmazások Kovács Levente Képfeldolgozás és Neuroszámítógépek Tanszék Témavezet
Pannon Egyetem Informatikai Tudományok Doktori Iskola Tézisfüzet Kétdimenziós mesterséges festési eljárások. Hatások és alkalmazások Kovács Levente Képfeldolgozás és Neuroszámítógépek Tanszék Témavezet
PILÓTANÉLKÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNEK ELŐZETES MÉRETEZÉSE. Bevezetés. 1. Időtartománybeli szabályozótervezési módszerek
 Szabolcsi Róbert Szegedi Péter PILÓTANÉLÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNE ELŐZETES MÉRETEZÉSE Bevezetés A cikkben a Szojka III pilótanélküli repülőgép [8] szakirodalomban rendelkezésre álló matematikai
Szabolcsi Róbert Szegedi Péter PILÓTANÉLÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNE ELŐZETES MÉRETEZÉSE Bevezetés A cikkben a Szojka III pilótanélküli repülőgép [8] szakirodalomban rendelkezésre álló matematikai
A HIBRID LINEÁRIS LÉPTET MOTOR HATÉKONYSÁGÁNAK NÖVELÉSI MÓDOZATAIRÓL
 A HIBRID LINEÁRIS LÉPTET MOTOR HATÉKONYSÁGÁNAK NÖVELÉSI MÓDOZATAIRÓL Szabó Loránd - Ioan-Adrian Viorel - Józsa János Kolozsvári M szaki Egyetem, Villamos Gépek Tanszék 3400 Kolozsvár, Pf. 358. e-mail:
A HIBRID LINEÁRIS LÉPTET MOTOR HATÉKONYSÁGÁNAK NÖVELÉSI MÓDOZATAIRÓL Szabó Loránd - Ioan-Adrian Viorel - Józsa János Kolozsvári M szaki Egyetem, Villamos Gépek Tanszék 3400 Kolozsvár, Pf. 358. e-mail:
Analízisfeladat-gyűjtemény IV.
 Oktatási segédanyag a Programtervező matematikus szak Analízis. című tantárgyához (003 004. tanév tavaszi félév) Analízisfeladat-gyűjtemény IV. (Függvények határértéke és folytonossága) Összeállította
Oktatási segédanyag a Programtervező matematikus szak Analízis. című tantárgyához (003 004. tanév tavaszi félév) Analízisfeladat-gyűjtemény IV. (Függvények határértéke és folytonossága) Összeállította
GÉPI ÉS EMBERI POZICIONÁLÁSI, ÉRINTÉSI MŰVELETEK DINAMIKÁJA
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM MŰSZAKI MECHANIKAI TANSZÉK PhD Tézisfüzet GÉPI ÉS EMBERI POZICIONÁLÁSI, ÉRINTÉSI MŰVELETEK DINAMIKÁJA Szerző MAGYAR Bálint Témavezető Dr. STÉPÁN Gábor Budapest,
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM MŰSZAKI MECHANIKAI TANSZÉK PhD Tézisfüzet GÉPI ÉS EMBERI POZICIONÁLÁSI, ÉRINTÉSI MŰVELETEK DINAMIKÁJA Szerző MAGYAR Bálint Témavezető Dr. STÉPÁN Gábor Budapest,
Bemenet modellezése II.
 Bemenet modellezése II. Vidács Attila 2005. november 3. Hálózati szimulációs technikák, 2005/11/3 1 Kiszolgálási id k modellezése Feladat: Egy bemeneti modell felállítása egy egy kiszolgálós sorbanállási
Bemenet modellezése II. Vidács Attila 2005. november 3. Hálózati szimulációs technikák, 2005/11/3 1 Kiszolgálási id k modellezése Feladat: Egy bemeneti modell felállítása egy egy kiszolgálós sorbanállási
XII. MAGYAR MECHANIKAI KONFERENCIA MaMeK, 2015 Miskolc, 2015. augusztus 25-27. SZÁN SZABÁLYOZÁSÁNAK HATÁSA AZ ESZTERGÁLÁS REGENERATÍV REZGÉSEIRE
 XII. MAGYAR MECANIKAI KONFERENCIA MaMeK, 205 Miskolc, 205. augusztus 25-27. SZÁN SZABÁLYOZÁSÁNAK ATÁSA AZ ESZTERGÁLÁS REGENERATÍV REZGÉSEIRE Lehotzky Dávid, Insperger Tamás 2 és Stépán Gábor 3,2,3 Budapesti
XII. MAGYAR MECANIKAI KONFERENCIA MaMeK, 205 Miskolc, 205. augusztus 25-27. SZÁN SZABÁLYOZÁSÁNAK ATÁSA AZ ESZTERGÁLÁS REGENERATÍV REZGÉSEIRE Lehotzky Dávid, Insperger Tamás 2 és Stépán Gábor 3,2,3 Budapesti
 Kibernetika korábbi vizsga zárthelyi dolgozatokból válogatott tesztkérdések Figyelem! Az alábbi tesztek csak mintául szolgálnak a tesztkérdések megoldásához, azaz a bemagolásuk nem jelenti a tananyag elsajátítását
Kibernetika korábbi vizsga zárthelyi dolgozatokból válogatott tesztkérdések Figyelem! Az alábbi tesztek csak mintául szolgálnak a tesztkérdések megoldásához, azaz a bemagolásuk nem jelenti a tananyag elsajátítását
Hazánkban jelentõs múlttal rendelkeznek a klasszikus tesztelméleti módszerekkel
 Iskolakultúra 2008/1 2 Molnár Gyöngyvér SZTE, Pedagógia Tanszék, MTA-SZTE Képességkutató Csoport A Rasch-modell kiterjesztése nem dichotóm adatok elemzésére: a rangskálás és a parciális kredit modell A
Iskolakultúra 2008/1 2 Molnár Gyöngyvér SZTE, Pedagógia Tanszék, MTA-SZTE Képességkutató Csoport A Rasch-modell kiterjesztése nem dichotóm adatok elemzésére: a rangskálás és a parciális kredit modell A
Elektro-pneumatikus tengelykapcsoló rendszerek megfigyelő alapú előrecsatolt/visszacsatolt irányítása. Szimandl Barna
 Elektro-pneumatikus tengelykapcsoló rendszerek megfigyelő alapú előrecsatolt/visszacsatolt irányítása Tézisek Szimandl Barna Témavezető: Németh Huba Kandó Kálmán Doktori Iskola Közlekedés- és járműtudományok
Elektro-pneumatikus tengelykapcsoló rendszerek megfigyelő alapú előrecsatolt/visszacsatolt irányítása Tézisek Szimandl Barna Témavezető: Németh Huba Kandó Kálmán Doktori Iskola Közlekedés- és járműtudományok
2. előadás: További gömbi fogalmak
 2 előadás: További gömbi fogalmak 2 előadás: További gömbi fogalmak Valamely gömbi főkör ívének α azimutja az ív egy tetszőleges pontjában az a szög, amit az ív és a meridián érintői zárnak be egymással
2 előadás: További gömbi fogalmak 2 előadás: További gömbi fogalmak Valamely gömbi főkör ívének α azimutja az ív egy tetszőleges pontjában az a szög, amit az ív és a meridián érintői zárnak be egymással
Zárójelentés 2003-2005
 Zárójelentés 2003-2005 A kutatási programban nemlineáris rendszerek ún. lineáris, paraméter-változós (LPV) modellezésével és rendszer elméleti tulajdonságainak kidolgozásával foglalkoztunk. Az LPV modellosztály
Zárójelentés 2003-2005 A kutatási programban nemlineáris rendszerek ún. lineáris, paraméter-változós (LPV) modellezésével és rendszer elméleti tulajdonságainak kidolgozásával foglalkoztunk. Az LPV modellosztály
NUMERIKUS MÓDSZEREK FARAGÓ ISTVÁN HORVÁTH RÓBERT. Ismertető Tartalomjegyzék Pályázati támogatás Gondozó
 FARAGÓ ISTVÁN HORVÁTH RÓBERT NUMERIKUS MÓDSZEREK 2011 Ismertető Tartalomjegyzék Pályázati támogatás Gondozó Szakmai vezető Lektor Technikai szerkesztő Copyright Az Olvasó most egy egyetemi jegyzetet tart
FARAGÓ ISTVÁN HORVÁTH RÓBERT NUMERIKUS MÓDSZEREK 2011 Ismertető Tartalomjegyzék Pályázati támogatás Gondozó Szakmai vezető Lektor Technikai szerkesztő Copyright Az Olvasó most egy egyetemi jegyzetet tart
Dinamikus programozás alapú szivattyú üzemvitel optimalizálási technikák (főként) kombinatorikus vízműhálózatokra
 kombinatorikus vízműhálózatokra") Systeemitekniikan Laboratorio Dinamikus programozás alapú szivattyú üzemvitel optimalizálási technikák (főként) kombinatorikus vízműhálózatokra Bene József HDR, Dr. Hős Csaba HDR, Dr. Enso Ikonen SYTE,
Systeemitekniikan Laboratorio Dinamikus programozás alapú szivattyú üzemvitel optimalizálási technikák (főként) kombinatorikus vízműhálózatokra Bene József HDR, Dr. Hős Csaba HDR, Dr. Enso Ikonen SYTE,
Dr. Kuczmann Miklós JELEK ÉS RENDSZEREK
 Dr. Kuczmann Miklós JELEK ÉS RENDSZEREK Dr. Kuczmann Miklós JELEK ÉS RENDSZEREK Z UNIVERSITAS-GYŐR Kht. Győr, 25 SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR TÁVKÖZLÉSI TANSZÉK Egyetemi jegyzet Írta:
Dr. Kuczmann Miklós JELEK ÉS RENDSZEREK Dr. Kuczmann Miklós JELEK ÉS RENDSZEREK Z UNIVERSITAS-GYŐR Kht. Győr, 25 SZÉCHENYI ISTVÁN EGYETEM MŰSZAKI TUDOMÁNYI KAR TÁVKÖZLÉSI TANSZÉK Egyetemi jegyzet Írta:
A gyakorlatok HF-inak megoldása Az 1. gyakorlat HF-inak megoldása. 1. Tagadások:
 . Tagadások: A gyakorlatok HF-inak megoldása Az. gyakorlat HF-inak megoldása "Nem észak felé kell indulnunk és nem kell visszafordulnunk." "Nem esik az es, vagy nem fúj a szél." "Van olyan puha szilva,
. Tagadások: A gyakorlatok HF-inak megoldása Az. gyakorlat HF-inak megoldása "Nem észak felé kell indulnunk és nem kell visszafordulnunk." "Nem esik az es, vagy nem fúj a szél." "Van olyan puha szilva,
AKTUÁTOR MODELLEK KIVÁLASZTÁSA ÉS OBJEKTÍV ÖSSZEHASONLÍTÁSA
 AKTUÁTOR MODELLEK KIVÁLASZTÁSA ÉS OBJEKTÍV ÖSSZEHASONLÍTÁSA Kovács Ernő 1, Füvesi Viktor 2 1 Egyetemi docens, PhD; 2 tudományos segédmunkatárs 1 Eletrotechnikai és Elektronikai Tanszék, Miskolci Egyetem
AKTUÁTOR MODELLEK KIVÁLASZTÁSA ÉS OBJEKTÍV ÖSSZEHASONLÍTÁSA Kovács Ernő 1, Füvesi Viktor 2 1 Egyetemi docens, PhD; 2 tudományos segédmunkatárs 1 Eletrotechnikai és Elektronikai Tanszék, Miskolci Egyetem
Tevékenység: Olvassa el a fejezetet! Gyűjtse ki és jegyezze meg a ragasztás előnyeit és a hátrányait! VIDEO (A ragasztás ereje)
") lvassa el a fejezetet! Gyűjtse ki és jegyezze meg a ragasztás előnyeit és a hátrányait! VIDE (A ragasztás ereje) A ragasztás egyre gyakrabban alkalmazott kötéstechnológia az ipari gyakorlatban. Ennek oka,
lvassa el a fejezetet! Gyűjtse ki és jegyezze meg a ragasztás előnyeit és a hátrányait! VIDE (A ragasztás ereje) A ragasztás egyre gyakrabban alkalmazott kötéstechnológia az ipari gyakorlatban. Ennek oka,
Lineáris algebra - jegyzet. Kupán Pál
 Lineáris algebra - jegyzet Kupán Pál Tartalomjegyzék fejezet Vektorgeometria 5 Vektorok normája Vektorok skaláris szorzata 4 3 Vektorok vektoriális szorzata 5 fejezet Vektorterek, alterek, bázis Vektorterek
Lineáris algebra - jegyzet Kupán Pál Tartalomjegyzék fejezet Vektorgeometria 5 Vektorok normája Vektorok skaláris szorzata 4 3 Vektorok vektoriális szorzata 5 fejezet Vektorterek, alterek, bázis Vektorterek
Tűgörgős csapágy szöghiba érzékenységének vizsgálata I.
 Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Tudományos Diákköri Konferencia Tűgörgős csapágy szöghiba érzékenységének vizsgálata I. Szöghézag és a beépítésből adódó szöghiba vizsgálata
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Tudományos Diákköri Konferencia Tűgörgős csapágy szöghiba érzékenységének vizsgálata I. Szöghézag és a beépítésből adódó szöghiba vizsgálata
XII. MAGYAR MECHANIKAI KONFERENCIA MaMeK, 2015 Miskolc, 2015. augusztus 25-27. GUMIKERÉK DINAMIKÁJÁNAK HATÁSA UTÁNFUTÓS JÁRMŰSZERELVÉNY STABILITÁSÁRA
 XII. MAGYAR MECHANIKAI KONFERENCIA MaMeK, 2015 Miskolc, 2015. augusztus 25-27. GUMIKERÉK DINAMIKÁJÁNAK HATÁSA UTÁNFUTÓS JÁRMŰSZERELVÉNY STABILITÁSÁRA Beregi Sándor 1 és Takács Dénes 2 1 Budapesti Műszaki
XII. MAGYAR MECHANIKAI KONFERENCIA MaMeK, 2015 Miskolc, 2015. augusztus 25-27. GUMIKERÉK DINAMIKÁJÁNAK HATÁSA UTÁNFUTÓS JÁRMŰSZERELVÉNY STABILITÁSÁRA Beregi Sándor 1 és Takács Dénes 2 1 Budapesti Műszaki
Széchenyi István Egyetem, 2005
 Gáspár Csaba, Molnárka Győző Lineáris algebra és többváltozós függvények Széchenyi István Egyetem, 25 Vektorterek Ebben a fejezetben a geometriai vektorfogalom ( irányított szakasz ) erős általánosítását
Gáspár Csaba, Molnárka Győző Lineáris algebra és többváltozós függvények Széchenyi István Egyetem, 25 Vektorterek Ebben a fejezetben a geometriai vektorfogalom ( irányított szakasz ) erős általánosítását
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM GÉPÉSZMÉRNÖKI KAR Épületgépészeti és Gépészeti Eljárástechnika Tanszék VARJU EVELIN
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM GÉPÉSZMÉRNÖKI KAR Épületgépészeti és Gépészeti Eljárástechnika Tanszék VARJU EVELIN Térfogati hőátadási tényező meghatározása fluidizációs szárításnál TDK
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM GÉPÉSZMÉRNÖKI KAR Épületgépészeti és Gépészeti Eljárástechnika Tanszék VARJU EVELIN Térfogati hőátadási tényező meghatározása fluidizációs szárításnál TDK
4. sz. Füzet. A hibafa számszerű kiértékelése 2002.
 M Ű S Z A K I B I Z O N S Á G I F Ő F E L Ü G Y E L E 4. sz. Füzet A hibafa számszerű kiértékelése 00. Sem a Műszaki Biztonsági Főfelügyelet, sem annak nevében, képviseletében vagy részéről eljáró személy
M Ű S Z A K I B I Z O N S Á G I F Ő F E L Ü G Y E L E 4. sz. Füzet A hibafa számszerű kiértékelése 00. Sem a Műszaki Biztonsági Főfelügyelet, sem annak nevében, képviseletében vagy részéről eljáró személy
REGULARIZÁLT INVERZ KARAKTERISZTIKÁKKAL
 NEMLINEÁRISAN TORZULT OPTIKAI HANGFELVÉTELEK HELYREÁLLÍTÁSA REGULARIZÁLT INVERZ KARAKTERISZTIKÁKKAL Ph.D. értekezés tézisei Bakó Tamás Béla okleveles villamosmérnök Témavezető: dr. Dabóczi Tamás aműszaki
NEMLINEÁRISAN TORZULT OPTIKAI HANGFELVÉTELEK HELYREÁLLÍTÁSA REGULARIZÁLT INVERZ KARAKTERISZTIKÁKKAL Ph.D. értekezés tézisei Bakó Tamás Béla okleveles villamosmérnök Témavezető: dr. Dabóczi Tamás aműszaki
Bináris keres fák kiegyensúlyozásai. Egyed Boglárka
 Eötvös Loránd Tudományegyetem Természettudományi Kar Bináris keres fák kiegyensúlyozásai BSc szakdolgozat Egyed Boglárka Matematika BSc, Alkalmazott matematikus szakirány Témavezet : Fekete István, egyetemi
Eötvös Loránd Tudományegyetem Természettudományi Kar Bináris keres fák kiegyensúlyozásai BSc szakdolgozat Egyed Boglárka Matematika BSc, Alkalmazott matematikus szakirány Témavezet : Fekete István, egyetemi
OTKA nyilvántartási szám: T047198 ZÁRÓJELENTÉS
 MESTERSÉGES INTELLIGENCIA MÓDSZEREK ALKALMAZÁSA A FOLYAMATMODELLEZÉSBEN című OTKA pályázatról 2004. jan. 01 2007. dec. 31. (Vezető kutató: Piglerné dr. Lakner Rozália) A mesterséges intelligencia eszközök
MESTERSÉGES INTELLIGENCIA MÓDSZEREK ALKALMAZÁSA A FOLYAMATMODELLEZÉSBEN című OTKA pályázatról 2004. jan. 01 2007. dec. 31. (Vezető kutató: Piglerné dr. Lakner Rozália) A mesterséges intelligencia eszközök
Parciális differenciálegyenletek numerikus módszerei számítógépes alkalmazásokkal Karátson, János Horváth, Róbert Izsák, Ferenc
 Karátson, János Horváth, Róbert Izsák, Ferenc numerikus módszerei számítógépes írta Karátson, János, Horváth, Róbert, és Izsák, Ferenc Publication date 2013 Szerzői jog 2013 Karátson János, Horváth Róbert,
Karátson, János Horváth, Róbert Izsák, Ferenc numerikus módszerei számítógépes írta Karátson, János, Horváth, Róbert, és Izsák, Ferenc Publication date 2013 Szerzői jog 2013 Karátson János, Horváth Róbert,
A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol
 A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol Attila FODOR 1), Dénes FODOR Dr. 1), Károly Bíró Dr. 2), Loránd Szabó Dr. 2) 1) Pannon Egyetem, H-8200 Veszprém Egyetem
A CAN mint ipari kommunikációs protokoll CAN as industrial communication protocol Attila FODOR 1), Dénes FODOR Dr. 1), Károly Bíró Dr. 2), Loránd Szabó Dr. 2) 1) Pannon Egyetem, H-8200 Veszprém Egyetem
Közbenső hőcserélővel ellátott hőszivattyú teljesítménytényezőjének kivizsgálása
 Közbenső hőcserélővel ellátott hőszivattyú teljesítménytényezőjének kivizsgálása Boros Dorottya Szabadkai Műszaki Szakfőiskola Szabadka, Szerbia dorottya93@gmail.com Összefoglaló: A dolgozatunkban bemutatunk
Közbenső hőcserélővel ellátott hőszivattyú teljesítménytényezőjének kivizsgálása Boros Dorottya Szabadkai Műszaki Szakfőiskola Szabadka, Szerbia dorottya93@gmail.com Összefoglaló: A dolgozatunkban bemutatunk
SZOMSZÉDSÁGI SZEKVENCIÁK ÉS ALKALMAZÁSAIK A KÉPFELDOLGOZÁSBAN ÉS KÉPI ADATBÁZISOKBAN
 SZOMSZÉDSÁGI SZEKVENCIÁK ÉS ALKALMAZÁSAIK A KÉPFELDOLGOZÁSBAN ÉS KÉPI ADATBÁZISOKBAN NEIGHBORHOOD SEQUENCES AND THEIR APPLICATIONS IN IMAGE PROCESSING AND IMAGE DATABASES András Hajdu, János Kormos, Tamás
SZOMSZÉDSÁGI SZEKVENCIÁK ÉS ALKALMAZÁSAIK A KÉPFELDOLGOZÁSBAN ÉS KÉPI ADATBÁZISOKBAN NEIGHBORHOOD SEQUENCES AND THEIR APPLICATIONS IN IMAGE PROCESSING AND IMAGE DATABASES András Hajdu, János Kormos, Tamás
Tartalom. 1. Számítógéppel irányított rendszerek 2. Az egységugrásra ekvivalens diszkrét állapottér
 Tartalom 1. Számítógéppel irányított rendszerek 2. Az egységugrásra ekvivalens diszkrét állapottér 2015 1 Számítógéppel irányított rendszerek Számítógéppel irányított rendszer blokkvázlata Tartószerv D/A
Tartalom 1. Számítógéppel irányított rendszerek 2. Az egységugrásra ekvivalens diszkrét állapottér 2015 1 Számítógéppel irányított rendszerek Számítógéppel irányított rendszer blokkvázlata Tartószerv D/A
Determinisztikus folyamatok. Kun Ferenc
 Determinisztikus folyamatok számítógépes modellezése kézirat Kun Ferenc Debreceni Egyetem Elméleti Fizikai Tanszék Debrecen 2001 2 Determinisztikus folyamatok Tartalomjegyzék 1. Determinisztikus folyamatok
Determinisztikus folyamatok számítógépes modellezése kézirat Kun Ferenc Debreceni Egyetem Elméleti Fizikai Tanszék Debrecen 2001 2 Determinisztikus folyamatok Tartalomjegyzék 1. Determinisztikus folyamatok
4. A GYÁRTÁS ÉS GYÁRTÓRENDSZER TERVEZÉSÉNEK ÁLTALÁNOS MODELLJE (Dudás Illés)
") 4. A GYÁRTÁS ÉS GYÁRTÓRENDSZER TERVEZÉSÉNEK ÁLTALÁNOS MODELLJE (Dudás Illés) ). A gyártás-előkészítés-irányítás funkcióit, alrendszereit egységbe foglaló (általános gyártási) modellt a 4.1. ábra szemlélteti.
4. A GYÁRTÁS ÉS GYÁRTÓRENDSZER TERVEZÉSÉNEK ÁLTALÁNOS MODELLJE (Dudás Illés) ). A gyártás-előkészítés-irányítás funkcióit, alrendszereit egységbe foglaló (általános gyártási) modellt a 4.1. ábra szemlélteti.
TMDK-DOLGOZAT. Stacionárius és rádiófrekvenciás elektromágneses terek vizsgálata a momentumok módszerének segítségével
 TMDK-DOLGOZAT Stacionárius és rádiófrekvenciás elektromágneses terek vizsgálata a momentumok módszerének segítségével Írta: M.Sc. szakos villamosmérnök hallgató Konzulens: Friedl Gergely doktorandusz hallgató,
TMDK-DOLGOZAT Stacionárius és rádiófrekvenciás elektromágneses terek vizsgálata a momentumok módszerének segítségével Írta: M.Sc. szakos villamosmérnök hallgató Konzulens: Friedl Gergely doktorandusz hallgató,
matematikai statisztika 2006. október 24.
 Valószínűségszámítás és matematikai statisztika 2006. október 24. ii Tartalomjegyzék I. Valószínűségszámítás 1 1. Véletlen jelenségek matematikai modellje 3 1.1. Valószínűségi mező..............................
Valószínűségszámítás és matematikai statisztika 2006. október 24. ii Tartalomjegyzék I. Valószínűségszámítás 1 1. Véletlen jelenségek matematikai modellje 3 1.1. Valószínűségi mező..............................
Marcsa Dániel. M.Sc. szakos mechatronikus hallgató. Konzulens: Dr. Kuczmann Miklós, Ph.D. egyetemi docens. Elektromágneses Terek Laboratórium
 Mágneses csapágy szimulációja végeselem-módszerrel Írta: Marcsa Dániel M.Sc. szakos mechatronikus hallgató Konzulens: Dr. Kuczmann Miklós, Ph.D. egyetemi docens Elektromágneses Terek Laboratórium Távközlési
Mágneses csapágy szimulációja végeselem-módszerrel Írta: Marcsa Dániel M.Sc. szakos mechatronikus hallgató Konzulens: Dr. Kuczmann Miklós, Ph.D. egyetemi docens Elektromágneses Terek Laboratórium Távközlési
Prizmás impulzuskompresszorok hômérsékleti stabilitásának modellezése
 Prizmás impulzuskompresszorok hômérsékleti stabilitásának modellezése Tudományos diákköri dolgozat Írta: DOMBI PÉTER Témavezetô: DR. OSVAY KÁROLY JATE Optikai és Kvantumelektronikai Tanszék Szeged 1998.
Prizmás impulzuskompresszorok hômérsékleti stabilitásának modellezése Tudományos diákköri dolgozat Írta: DOMBI PÉTER Témavezetô: DR. OSVAY KÁROLY JATE Optikai és Kvantumelektronikai Tanszék Szeged 1998.
Billenőkörök. Billenő körök
 Billenő körök A billenőkörök, vagy más néven multivibrátorok pozitívan visszacsatolt, kétállapotú áramkörök. Kimeneteik szigorúan két feszültségszint (LOW és HIGH) között változnak. A billenőkörök rendszerint
Billenő körök A billenőkörök, vagy más néven multivibrátorok pozitívan visszacsatolt, kétállapotú áramkörök. Kimeneteik szigorúan két feszültségszint (LOW és HIGH) között változnak. A billenőkörök rendszerint
ÖNJAVÍTÓ AGGREGÁLÁS SZENZORHÁLÓZATOKBAN ÉS AGGREGÁTOR NODE VÁLASZTÁS. Schaffer Péter. Tézisfüzet. Konzulens: Buttyán Levente, Ph.D.
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM HÍRADÁSTECHNIKAI TANSZÉK ÖNJAVÍTÓ AGGREGÁLÁS ÉS AGGREGÁTOR NODE VÁLASZTÁS SZENZORHÁLÓZATOKBAN Tézisfüzet Schaffer Péter Konzulens: Buttyán Levente, Ph.D.
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM HÍRADÁSTECHNIKAI TANSZÉK ÖNJAVÍTÓ AGGREGÁLÁS ÉS AGGREGÁTOR NODE VÁLASZTÁS SZENZORHÁLÓZATOKBAN Tézisfüzet Schaffer Péter Konzulens: Buttyán Levente, Ph.D.
I. BEVEZETÉS, MOTIVÁCIÓ, PROBLÉMAFELVETÉS
 Szolnoki Tudományos Közlemények XIV. Szolnok, 1. Prof. Dr. Szabolcsi Róbert 1 MECHANIKAI LENGŐ RENDSZEREK RENDSZERDINAMIKAI IDENTIFIKÁCIÓJA I. BEVEZETÉS, MOTIVÁCIÓ, PROBLÉMAFELVETÉS A műszaki gyakorlatban
Szolnoki Tudományos Közlemények XIV. Szolnok, 1. Prof. Dr. Szabolcsi Róbert 1 MECHANIKAI LENGŐ RENDSZEREK RENDSZERDINAMIKAI IDENTIFIKÁCIÓJA I. BEVEZETÉS, MOTIVÁCIÓ, PROBLÉMAFELVETÉS A műszaki gyakorlatban
Miskolci Egyetem GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR. Analízis I. példatár. (kidolgozott megoldásokkal) elektronikus feladatgyűjtemény
 elektronikus feladatgyűjtemény") Miskolci Egyetem GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Analízis I. példatár kidolgozott megoldásokkal) elektronikus feladatgyűjtemény Összeállította: Lengyelné Dr. Szilágyi Szilvia Miskolc, 013. Köszönetnyilvánítás
Miskolci Egyetem GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Analízis I. példatár kidolgozott megoldásokkal) elektronikus feladatgyűjtemény Összeállította: Lengyelné Dr. Szilágyi Szilvia Miskolc, 013. Köszönetnyilvánítás
KOCKÁZATKEZELÉS A REZGÉSDIAGNOSZTIKÁBAN TÖBBVÁLTOZÓS SZABÁLYOZÓ KÁRTYA SEGÍTSÉGÉVEL
 KOCKÁZATKEZELÉS A REZGÉSDIAGNOSZTIKÁBAN TÖBBVÁLTOZÓS SZABÁLYOZÓ KÁRTYA SEGÍTSÉGÉVEL Dr. Kosztyán Zsolt Tibor, Pannon Egyetem, Kvantitatív Módszerek Intézeti Tanszék Katona Attila Imre, Pannon Egyetem,
KOCKÁZATKEZELÉS A REZGÉSDIAGNOSZTIKÁBAN TÖBBVÁLTOZÓS SZABÁLYOZÓ KÁRTYA SEGÍTSÉGÉVEL Dr. Kosztyán Zsolt Tibor, Pannon Egyetem, Kvantitatív Módszerek Intézeti Tanszék Katona Attila Imre, Pannon Egyetem,
Ph. D. értekezés tézisei
 Ph. D. értekezés tézisei Szabó István: NAPELEMES TÁPELLÁTÓ RENDSZEREKBEN ALKALMAZOTT NÖVELT HATÁSFOKÚ, ANALÓG MAXIMÁLIS TELJESÍTMÉNYKÖVETŐ ÁRAMKÖR ANALÍZISE Konzulens: dr. Szabó József Budapest, 1997.
Ph. D. értekezés tézisei Szabó István: NAPELEMES TÁPELLÁTÓ RENDSZEREKBEN ALKALMAZOTT NÖVELT HATÁSFOKÚ, ANALÓG MAXIMÁLIS TELJESÍTMÉNYKÖVETŐ ÁRAMKÖR ANALÍZISE Konzulens: dr. Szabó József Budapest, 1997.
VALÓS HULLÁMFRONT ELŐÁLLÍTÁSA A SZÁMÍTÓGÉPES ÉS A DIGITÁLIS HOLOGRÁFIÁBAN PhD tézisfüzet
 VALÓS HULLÁMFRONT ELŐÁLLÍTÁSA A SZÁMÍTÓGÉPES ÉS A DIGITÁLIS HOLOGRÁFIÁBAN PhD tézisfüzet PAPP ZSOLT Budapesti Műszaki és Gazdaságtudományi Egyetem Fizika Tanszék 2003 1 Bevezetés A lézerek megjelenését
VALÓS HULLÁMFRONT ELŐÁLLÍTÁSA A SZÁMÍTÓGÉPES ÉS A DIGITÁLIS HOLOGRÁFIÁBAN PhD tézisfüzet PAPP ZSOLT Budapesti Műszaki és Gazdaságtudományi Egyetem Fizika Tanszék 2003 1 Bevezetés A lézerek megjelenését
Adatfolyam alapú RACER tömbprocesszor és algoritmus implementációs módszerek valamint azok alkalmazásai parallel, heterogén számítási architektúrákra
 Adatfolyam alapú RACER tömbprocesszor és algoritmus implementációs módszerek valamint azok alkalmazásai parallel, heterogén számítási architektúrákra Témavezet : Dr. Cserey György 2014 szeptember 22. Kit
Adatfolyam alapú RACER tömbprocesszor és algoritmus implementációs módszerek valamint azok alkalmazásai parallel, heterogén számítási architektúrákra Témavezet : Dr. Cserey György 2014 szeptember 22. Kit
ÉS TESZTEK A DEFINITSÉG
 MÁTRIX DEFINITSÉGÉNEK FOGALMA ÉS TESZTEK A DEFINITSÉG ELDÖNTÉSÉRE DR. NAGY TAMÁS egyetemi docens Miskolci Egyetem Alkalmazott Matematikai Tanszék A bemutatott kutató munka a TÁMOP-..1.B-10//KONV-010-0001
MÁTRIX DEFINITSÉGÉNEK FOGALMA ÉS TESZTEK A DEFINITSÉG ELDÖNTÉSÉRE DR. NAGY TAMÁS egyetemi docens Miskolci Egyetem Alkalmazott Matematikai Tanszék A bemutatott kutató munka a TÁMOP-..1.B-10//KONV-010-0001
Brückler Zita Flóra. Lineáris rendszerek integrálása
 Eötvös Loránd Tudományegyetem Természettudományi Kar Brückler Zita Flóra Lineáris rendszerek integrálása BSc szakdolgozat Témavezető: Dr. Kovács Sándor Numerikus Analízis Tanszék Budapest, 2012 Köszönetnyilvánítás
Eötvös Loránd Tudományegyetem Természettudományi Kar Brückler Zita Flóra Lineáris rendszerek integrálása BSc szakdolgozat Témavezető: Dr. Kovács Sándor Numerikus Analízis Tanszék Budapest, 2012 Köszönetnyilvánítás
A FÓKUSZÁLT NAPENERGIA TÁROLÁSI ÉS HASZNOSÍTÁSI LEHETŐSÉGEI
 A FÓKUSZÁLT NAPENERGIA TÁROLÁSI ÉS HASZNOSÍTÁSI LEHETŐSÉGEI A HŐTÁROLÓ MÉRETÉNEK ÉS HŐSZIGETELÉSÉNEK OPTIMÁLISA POSSIBILITIES IN THE HEAT STORAGE AND EXPLOITATION OF CONCENTRATED SOLAR ENERGY OPTIMAL DESIGN
A FÓKUSZÁLT NAPENERGIA TÁROLÁSI ÉS HASZNOSÍTÁSI LEHETŐSÉGEI A HŐTÁROLÓ MÉRETÉNEK ÉS HŐSZIGETELÉSÉNEK OPTIMÁLISA POSSIBILITIES IN THE HEAT STORAGE AND EXPLOITATION OF CONCENTRATED SOLAR ENERGY OPTIMAL DESIGN
Pontszerű test, pontrendszer és merev test egyensúlya és mozgása (Vázlat)
") Pontszerű test, pontrendszer és merev test egyensúlya és mozgása (Vázlat) I. Pontszerű test 1. Pontszerű test modellje. Pontszerű test egyensúlya 3. Pontszerű test mozgása a) Egyenes vonalú egyenletes
Pontszerű test, pontrendszer és merev test egyensúlya és mozgása (Vázlat) I. Pontszerű test 1. Pontszerű test modellje. Pontszerű test egyensúlya 3. Pontszerű test mozgása a) Egyenes vonalú egyenletes
I. BEVEZETÉS------------------------------------------------------------------2
 TARTALOMJEGYZÉK I. BEVEZETÉS------------------------------------------------------------------2 II. EL ZMÉNYEK ---------------------------------------------------------------4 II. 1. A BENETTIN-STRELCYN
TARTALOMJEGYZÉK I. BEVEZETÉS------------------------------------------------------------------2 II. EL ZMÉNYEK ---------------------------------------------------------------4 II. 1. A BENETTIN-STRELCYN
Hosszú Zsuzsanna Körmendi Gyöngyi Tamási Bálint Világi Balázs: A hitelkínálat hatása a magyar gazdaságra*
 Hosszú Zsuzsanna Körmendi Gyöngyi Tamási Bálint Világi Balázs: A hitelkínálat hatása a magyar gazdaságra* A hitelkínálat elmúlt évekbeli alakulását, szerepének jelentőségét vizsgáljuk különböző megközelítésekben,
Hosszú Zsuzsanna Körmendi Gyöngyi Tamási Bálint Világi Balázs: A hitelkínálat hatása a magyar gazdaságra* A hitelkínálat elmúlt évekbeli alakulását, szerepének jelentőségét vizsgáljuk különböző megközelítésekben,
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék.
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék Balogh Attila Hatásfoknövelő Irányítási Stratégiák Megújuló Energiaforrások
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Automatizálási és Alkalmazott Informatikai Tanszék Balogh Attila Hatásfoknövelő Irányítási Stratégiák Megújuló Energiaforrások
Az analízis néhány alkalmazása
 Az analízis néhány alkalmazása SZAKDOLGOZAT Eötvös Loránd Tudományegyetem Természettudományi kar Szerz : Fodor Péter Szak: Matematika Bsc Szakirány: Matematikai elemz Témavezet : Sikolya Eszter, adjunktus
Az analízis néhány alkalmazása SZAKDOLGOZAT Eötvös Loránd Tudományegyetem Természettudományi kar Szerz : Fodor Péter Szak: Matematika Bsc Szakirány: Matematikai elemz Témavezet : Sikolya Eszter, adjunktus
Kockázati folyamatok. Sz cs Gábor. Szeged, 2012. szi félév. Szegedi Tudományegyetem, Bolyai Intézet
 Kockázati folyamatok Sz cs Gábor Szegedi Tudományegyetem, Bolyai Intézet Szeged, 2012. szi félév Sz cs Gábor (SZTE, Bolyai Intézet) Kockázati folyamatok 2012. szi félév 1 / 48 Bevezetés A kurzus céljai
Kockázati folyamatok Sz cs Gábor Szegedi Tudományegyetem, Bolyai Intézet Szeged, 2012. szi félév Sz cs Gábor (SZTE, Bolyai Intézet) Kockázati folyamatok 2012. szi félév 1 / 48 Bevezetés A kurzus céljai
Dinamikus rendszerek identifikációja genetikus programozással
 Dinamikus rendszerek identifikációja genetikus programozással Madár János, Abonyi János, Szeifert Ferenc Veszprémi Egyetem, Folyamatmérnöki Tanszék www.fmt.vein.hu/softcomp, abonyij@fmt.vein.hu Kulcsszavak:
Dinamikus rendszerek identifikációja genetikus programozással Madár János, Abonyi János, Szeifert Ferenc Veszprémi Egyetem, Folyamatmérnöki Tanszék www.fmt.vein.hu/softcomp, abonyij@fmt.vein.hu Kulcsszavak:
Az e-kereskedelem elvárásai a biometriával szemben
 Őszi Arnold Az e-kereskedelem elvárásai a biometriával szemben Az e-kereskedelem elvárásai a biometriával szemben Őszi Arnold Óbudai Egyetem, Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar oszi.arnold@bgk.uni-obuda.hu
Őszi Arnold Az e-kereskedelem elvárásai a biometriával szemben Az e-kereskedelem elvárásai a biometriával szemben Őszi Arnold Óbudai Egyetem, Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar oszi.arnold@bgk.uni-obuda.hu
Sztojka Miroszláv LINEÁRIS ALGEBRA Egyetemi jegyzet Ungvár 2013
 UKRAJNA OKTATÁSI ÉS TUDOMÁNYÜGYI MINISZTÉRIUMA ÁLLAMI FELSŐOKTATÁSI INTÉZMÉNY UNGVÁRI NEMZETI EGYETEM MAGYAR TANNYELVŰ HUMÁN- ÉS TERMÉSZETTUDOMÁNYI KAR FIZIKA ÉS MATEMATIKA TANSZÉK Sztojka Miroszláv LINEÁRIS
UKRAJNA OKTATÁSI ÉS TUDOMÁNYÜGYI MINISZTÉRIUMA ÁLLAMI FELSŐOKTATÁSI INTÉZMÉNY UNGVÁRI NEMZETI EGYETEM MAGYAR TANNYELVŰ HUMÁN- ÉS TERMÉSZETTUDOMÁNYI KAR FIZIKA ÉS MATEMATIKA TANSZÉK Sztojka Miroszláv LINEÁRIS
Opponensi vélemény. Fullér Róbert: Multicriteria Decision Models with Imprecise Information. című akadémiai doktori értekezéséről
 Opponensi vélemény Fullér Róbert: Multicriteria Decision Models with Imprecise Information című akadémiai doktori értekezéséről Az értekezés témája a többkritériumú döntési modellek, a fuzzy rendszerek
Opponensi vélemény Fullér Róbert: Multicriteria Decision Models with Imprecise Information című akadémiai doktori értekezéséről Az értekezés témája a többkritériumú döntési modellek, a fuzzy rendszerek
Minta 1. MATEMATIKA KÖZÉPSZINTŰ ÍRÁSBELI FELADATSOR. I. rész
 1. MATEMATIKA KÖZÉPSZINTŰ ÍRÁSBELI FELADATSOR I. rész A feladatok megoldására 45 perc fordítható, az idő leteltével a munkát be kell fejeznie. A feladatok megoldási sorrendje tetszőleges. A feladatok megoldásához
1. MATEMATIKA KÖZÉPSZINTŰ ÍRÁSBELI FELADATSOR I. rész A feladatok megoldására 45 perc fordítható, az idő leteltével a munkát be kell fejeznie. A feladatok megoldási sorrendje tetszőleges. A feladatok megoldásához
Az aperturaantennák és méréstechnikájuk
 Az aperturaantennák és méréstechnikájuk (tanulmány) Szerzők: Nagy Lajos Lénárt Ferenc Bajusz Sándor Pető Tamás Az aperturaantennák és méréstechnikájuk A vezetékmentes hírközlés, távközlés és távmérés egyik
Az aperturaantennák és méréstechnikájuk (tanulmány) Szerzők: Nagy Lajos Lénárt Ferenc Bajusz Sándor Pető Tamás Az aperturaantennák és méréstechnikájuk A vezetékmentes hírközlés, távközlés és távmérés egyik
Differenciálegyenletek a hétköznapokban
 Differenciálegyenletek a hétköznapokban BSc Szakdolgozat Írta: Gondos Réka Matematika BSc, alkalmazott matematikus szakirány Témavezető: Besenyei Ádám adjunktus Alkalmazott Analízis és Számításmatematikai
Differenciálegyenletek a hétköznapokban BSc Szakdolgozat Írta: Gondos Réka Matematika BSc, alkalmazott matematikus szakirány Témavezető: Besenyei Ádám adjunktus Alkalmazott Analízis és Számításmatematikai
Kalman-féle rendszer definíció 2006.09.09. 1
 Kalman-féle rendszer definíció 2006.09.09. 1 Kálmán Rudolf Rudolf Emil Kalman was born in Budapest, Hungary, on May 19, 1930. He received the bachelor's degree (S.B.) and the master's degree (S.M.) in
Kalman-féle rendszer definíció 2006.09.09. 1 Kálmán Rudolf Rudolf Emil Kalman was born in Budapest, Hungary, on May 19, 1930. He received the bachelor's degree (S.B.) and the master's degree (S.M.) in
EÖTVÖS LORÁND TUDOMÁNYEGYETEM KLASSZIFIKÁCIÓ AZ ADATBÁNYÁSZATBAN
 EÖTVÖS LORÁND TUDOMÁNYEGYETEM KLASSZIFIKÁCIÓ AZ ADATBÁNYÁSZATBAN SZAKDOLGOZAT Készítette: Bényász Melinda Matematika Bsc Matematikai elemz szakirány Témavezet : Kósa Balázs Informatikai Kar Információs
EÖTVÖS LORÁND TUDOMÁNYEGYETEM KLASSZIFIKÁCIÓ AZ ADATBÁNYÁSZATBAN SZAKDOLGOZAT Készítette: Bényász Melinda Matematika Bsc Matematikai elemz szakirány Témavezet : Kósa Balázs Informatikai Kar Információs
Játékelmélet és pénzügyek
 Játékelmélet és pénzügyek Czigány Gábor 2013. május 30. Eötvös Lóránd Tudományegyetem - Budapesti Corvinus Egyetem Biztosítási és pénzügyi matematika mesterszak Témavezet : Dr. Csóka Péter Tartalomjegyzék
Játékelmélet és pénzügyek Czigány Gábor 2013. május 30. Eötvös Lóránd Tudományegyetem - Budapesti Corvinus Egyetem Biztosítási és pénzügyi matematika mesterszak Témavezet : Dr. Csóka Péter Tartalomjegyzék
Hálók kongruenciahálója
 Hálók kongruenciahálója Diplomamunka Írta: Skublics Benedek Témavezet : Pálfy Péter Pál Eötvös Loránd Tudományegyetem Matematikai Intézet 2007 Tartalomjegyzék Bevezetés 1 1. Hálók kongruenciái 3 1.1. A
Hálók kongruenciahálója Diplomamunka Írta: Skublics Benedek Témavezet : Pálfy Péter Pál Eötvös Loránd Tudományegyetem Matematikai Intézet 2007 Tartalomjegyzék Bevezetés 1 1. Hálók kongruenciái 3 1.1. A
SZÉN NANOCSŐ KOMPOZITOK ELŐÁLLÍTÁSA ÉS VIZSGÁLATA
 Pannon Egyetem Vegyészmérnöki Tudományok és Anyagtudományok Doktori Iskola SZÉN NANOCSŐ KOMPOZITOK ELŐÁLLÍTÁSA ÉS VIZSGÁLATA DOKTORI (Ph.D.) ÉRTEKEZÉS TÉZISEI Készítette: Szentes Adrienn okleveles vegyészmérnök
Pannon Egyetem Vegyészmérnöki Tudományok és Anyagtudományok Doktori Iskola SZÉN NANOCSŐ KOMPOZITOK ELŐÁLLÍTÁSA ÉS VIZSGÁLATA DOKTORI (Ph.D.) ÉRTEKEZÉS TÉZISEI Készítette: Szentes Adrienn okleveles vegyészmérnök
A KUTATÁS EREDMÉNYEI ZÁRÓJELENTÉS 2004-2006.
 ÖNELLENŐRZÉS ÉS FUTÁSIDEJŰ VERIFIKÁCIÓ SZÁMÍTÓGÉPES PROGRAMOKBAN OTKA T-046527 A KUTATÁS EREDMÉNYEI ZÁRÓJELENTÉS 2004-2006. Témavezető: dr. Majzik István Budapesti Műszaki és Gazdaságtudományi Egyetem
ÖNELLENŐRZÉS ÉS FUTÁSIDEJŰ VERIFIKÁCIÓ SZÁMÍTÓGÉPES PROGRAMOKBAN OTKA T-046527 A KUTATÁS EREDMÉNYEI ZÁRÓJELENTÉS 2004-2006. Témavezető: dr. Majzik István Budapesti Műszaki és Gazdaságtudományi Egyetem
ANYAGTÓL A SZERKEZETIG
 ANYAGTÓL A SZERKEZETIG ÉPÜLETFIZIKAI ALKALMAZÁSOK a SCHWENK ÜVEGGYAPOT TERMÉKEKHEZ KÉSZÍTETTE : a V-SYS Kft. SZERKESZTETTE : Dr.Várfalvi János PhD. SZERZŐK: Dr.Várfalvi János PhD. ifj. Várfalvi János 2010.
ANYAGTÓL A SZERKEZETIG ÉPÜLETFIZIKAI ALKALMAZÁSOK a SCHWENK ÜVEGGYAPOT TERMÉKEKHEZ KÉSZÍTETTE : a V-SYS Kft. SZERKESZTETTE : Dr.Várfalvi János PhD. SZERZŐK: Dr.Várfalvi János PhD. ifj. Várfalvi János 2010.
Protoncserélő membrános hidrogén - levegő tüzelőanyag-cellák működési elve, szabályozása és alkalmazása
 Protoncserélő membrános hidrogén - levegő tüzelőanyag-cellák működési elve, szabályozása és alkalmazása Közlekedési alkalmazásokhoz Kriston Ákos, PhD hallgató, Kriston Ákos, PhD hallgató, Inzelt György,
Protoncserélő membrános hidrogén - levegő tüzelőanyag-cellák működési elve, szabályozása és alkalmazása Közlekedési alkalmazásokhoz Kriston Ákos, PhD hallgató, Kriston Ákos, PhD hallgató, Inzelt György,
MATEMATIKA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ
 Matematika emelt szint 1613 ÉRETTSÉGI VIZSGA 016. május 3. MATEMATIKA EMELT SZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ EMBERI ERŐFORRÁSOK MINISZTÉRIUMA Fontos tudnivalók Formai előírások:
Matematika emelt szint 1613 ÉRETTSÉGI VIZSGA 016. május 3. MATEMATIKA EMELT SZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ EMBERI ERŐFORRÁSOK MINISZTÉRIUMA Fontos tudnivalók Formai előírások:
Kutatói pályára felkészítı akadémiai ismeretek modul
 Kutatói pályára felkészítı akadémiai ismeretek modul Környezetgazdálkodás Modellezés, mint módszer bemutatása KÖRNYEZETGAZDÁLKODÁSI AGRÁRMÉRNÖK MSC Az atmoszféra szerepe a talajnövény-légkör rendszerben
Kutatói pályára felkészítı akadémiai ismeretek modul Környezetgazdálkodás Modellezés, mint módszer bemutatása KÖRNYEZETGAZDÁLKODÁSI AGRÁRMÉRNÖK MSC Az atmoszféra szerepe a talajnövény-légkör rendszerben
Matematikai logika 1 A MATEMATIKAI LOGIKA ALAPJAI. Pécsi Tudományegyetem, 2005. Bevezetés
 Matematikai logika 1 A MATEMATIKAI LOGIKA ALAPJAI Dr. Tóth László Pécsi Tudományegyetem, 2005 Bevezetés A logika a gondolkodás általános törvényszerűségeit, szabályait vizsgálja. A matematikai logika a
Matematikai logika 1 A MATEMATIKAI LOGIKA ALAPJAI Dr. Tóth László Pécsi Tudományegyetem, 2005 Bevezetés A logika a gondolkodás általános törvényszerűségeit, szabályait vizsgálja. A matematikai logika a
Feszített vasbeton gerendatartó tervezése költségoptimumra
 newton Dr. Szalai Kálmán "Vasbetonelmélet" c. tárgya keretében elhangzott előadások alapján k 1000 km k m meter m Ft 1 1 1000 Feszített vasbeton gerendatartó tervezése költségoptimumra deg A következőkben
newton Dr. Szalai Kálmán "Vasbetonelmélet" c. tárgya keretében elhangzott előadások alapján k 1000 km k m meter m Ft 1 1 1000 Feszített vasbeton gerendatartó tervezése költségoptimumra deg A következőkben
Oktatási segédlet ACÉLSZERKEZETI ELEMEK TERVEZÉSE TŰZTEHERRE AZ EUROCODE SZERINT. Dr. Jármai Károly. Miskolci Egyetem
 Oktatási segédlet ACÉLSZERKEZETI ELEMEK TERVEZÉSE TŰZTEHERRE AZ EUROCODE SZERINT a Nemzetközi Hegesztett Szerkezettervező mérnök képzés hallgatóinak Dr. Jármai Károly Miskolci Egyetem 2014-1 - 1 Bevezetés
Oktatási segédlet ACÉLSZERKEZETI ELEMEK TERVEZÉSE TŰZTEHERRE AZ EUROCODE SZERINT a Nemzetközi Hegesztett Szerkezettervező mérnök képzés hallgatóinak Dr. Jármai Károly Miskolci Egyetem 2014-1 - 1 Bevezetés
Pénzügyi matematika. Medvegyev Péter. 2013. szeptember 8.
 Pénzügyi matematika Medvegyev Péter 13. szeptember 8. Az alábbi jegyzet a korábbi ötéves gazdaságmatematikai képzés keretében a Corvinus egyetemen tartott matematikai el adásaim kib vített verziója. A
Pénzügyi matematika Medvegyev Péter 13. szeptember 8. Az alábbi jegyzet a korábbi ötéves gazdaságmatematikai képzés keretében a Corvinus egyetemen tartott matematikai el adásaim kib vített verziója. A
Gyakorló feladatok a Közönséges dierenciálegyenletek kurzushoz
 Gyakorló feladatok a Közönséges dierenciálegyenletek kurzushoz Vas Gabriella 204. február A feladatgy jtemény a TÁMOP-4.2.4.A/2-/-202-000 azonosító számú Nemzeti Kiválóság Program Hazai hallgatói, illetve
Gyakorló feladatok a Közönséges dierenciálegyenletek kurzushoz Vas Gabriella 204. február A feladatgy jtemény a TÁMOP-4.2.4.A/2-/-202-000 azonosító számú Nemzeti Kiválóság Program Hazai hallgatói, illetve
LÁNG CSABÁNÉ SZÁMELMÉLET. Példák és feladatok. ELTE IK Budapest 2010-10-24 2. javított kiadás
 LÁNG CSABÁNÉ SZÁMELMÉLET Példák és feladatok ELTE IK Budapest 2010-10-24 2. javított kiadás Fels oktatási tankönyv Lektorálták: Kátai Imre Bui Minh Phong Burcsi Péter Farkas Gábor Fülöp Ágnes Germán László
LÁNG CSABÁNÉ SZÁMELMÉLET Példák és feladatok ELTE IK Budapest 2010-10-24 2. javított kiadás Fels oktatási tankönyv Lektorálták: Kátai Imre Bui Minh Phong Burcsi Péter Farkas Gábor Fülöp Ágnes Germán László
86 MAM112M előadásjegyzet, 2008/2009
 86 MAM11M előadásjegyzet, 8/9 5. Fourier-elmélet 5.1. Komplex trigonometrikus Fourier-sorok Tekintsük az [,], C Hilbert-teret, azaz azoknak a komplex értékű f : [,] C függvényeknek a halmazát, amelyek
86 MAM11M előadásjegyzet, 8/9 5. Fourier-elmélet 5.1. Komplex trigonometrikus Fourier-sorok Tekintsük az [,], C Hilbert-teret, azaz azoknak a komplex értékű f : [,] C függvényeknek a halmazát, amelyek
2. Halmazelmélet (megoldások)
") (megoldások) 1. A pozitív háromjegy páros számok halmaza. 2. Az olyan, 3-mal osztható egész számok halmaza, amelyek ( 100)-nál nagyobbak és 100-nál kisebbek. 3. Az olyan pozitív egész számok halmaza, amelyeknek
(megoldások) 1. A pozitív háromjegy páros számok halmaza. 2. Az olyan, 3-mal osztható egész számok halmaza, amelyek ( 100)-nál nagyobbak és 100-nál kisebbek. 3. Az olyan pozitív egész számok halmaza, amelyeknek
XIII. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA
 XIII. FIATAL ŰSZAKIAK TUDOÁNYOS ÜLÉSSZAKA Kolozsvár, 2008. március 14-15. Abstract NÉHÁNY GONDOLAT A BIOCHANIKÁRÓL A TÉRDIZÜLT KAPCSÁN. Csizmadia Béla Since the biomechanics is a new field of science,
XIII. FIATAL ŰSZAKIAK TUDOÁNYOS ÜLÉSSZAKA Kolozsvár, 2008. március 14-15. Abstract NÉHÁNY GONDOLAT A BIOCHANIKÁRÓL A TÉRDIZÜLT KAPCSÁN. Csizmadia Béla Since the biomechanics is a new field of science,
Matematikai programozás gyakorlatok
 VÁRTERÉSZ MAGDA Matematikai programozás gyakorlatok 2003/04-es tanév 1. félév Tartalomjegyzék 1. Számrendszerek 3 1.1. Javasolt órai feladat.............................. 3 1.2. Javasolt házi feladatok.............................
VÁRTERÉSZ MAGDA Matematikai programozás gyakorlatok 2003/04-es tanév 1. félév Tartalomjegyzék 1. Számrendszerek 3 1.1. Javasolt órai feladat.............................. 3 1.2. Javasolt házi feladatok.............................
DOKTORI (PHD) ÉRTEKEZÉS TÉZISEI SZAFNER GÁBOR
 ÉRTEKEZÉS TÉZISEI SZAFNER GÁBOR") DOKTORI (PHD) ÉRTEKEZÉS TÉZISEI SZAFNER GÁBOR MOSONMAGYARÓVÁR 2014 NYUGAT-MAGYARORSZÁGI EGYETEM Mezőgazdaság- és Élelmiszertudományi Kar Mosonmagyaróvár Matematika, Fizika és Informatika Intézet Ujhelyi
DOKTORI (PHD) ÉRTEKEZÉS TÉZISEI SZAFNER GÁBOR MOSONMAGYARÓVÁR 2014 NYUGAT-MAGYARORSZÁGI EGYETEM Mezőgazdaság- és Élelmiszertudományi Kar Mosonmagyaróvár Matematika, Fizika és Informatika Intézet Ujhelyi
Vasúti infrastruktúragazdálkodás kontrolling bázisú döntéselőkészítő rendszerek alkalmazásával
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék Vasúti infrastruktúragazdálkodás kontrolling bázisú döntéselőkészítő
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék Vasúti infrastruktúragazdálkodás kontrolling bázisú döntéselőkészítő
A megerosítéses tanulás és a szimulált hutés kombinált használata: algoritmusok és alkalmazások
 MISKOLCI EGYETEM DOKTORI (PH.D.) TÉZISFÜZETEI HATVANY JÓZSEF INFORMATIKAI TUDOMÁNYOK DOKTORI ISKOLA A megerosítéses tanulás és a szimulált hutés kombinált használata: algoritmusok és alkalmazások Készítette:
MISKOLCI EGYETEM DOKTORI (PH.D.) TÉZISFÜZETEI HATVANY JÓZSEF INFORMATIKAI TUDOMÁNYOK DOKTORI ISKOLA A megerosítéses tanulás és a szimulált hutés kombinált használata: algoritmusok és alkalmazások Készítette:
Kúpfogaskerék lefejtése léc-típusú szerszámmal
 Sapientia Erdélyi Magyar Tudományegyetem Műszaki és Humántudományok Kar Marosvásárhely Gépészmérnöki Tanszék Kúpfogaskerék lefejtése léc-típusú szerszámmal Sipos Bence, Sapientia EMTE, Marosvásárhely Műszaki
Sapientia Erdélyi Magyar Tudományegyetem Műszaki és Humántudományok Kar Marosvásárhely Gépészmérnöki Tanszék Kúpfogaskerék lefejtése léc-típusú szerszámmal Sipos Bence, Sapientia EMTE, Marosvásárhely Műszaki
A 2011/2012. tanévi FIZIKA Országos Középiskolai Tanulmányi Verseny első fordulójának feladatai és megoldásai fizikából. I.
 Oktatási Hivatal A 11/1. tanévi FIZIKA Országos Középiskolai Tanulmányi Verseny első fordulójának feladatai és megoldásai fizikából I. kategória A dolgozatok elkészítéséhez minden segédeszköz használható.
Oktatási Hivatal A 11/1. tanévi FIZIKA Országos Középiskolai Tanulmányi Verseny első fordulójának feladatai és megoldásai fizikából I. kategória A dolgozatok elkészítéséhez minden segédeszköz használható.
MŰSZAKI TUDOMÁNY AZ ÉSZAK-KELET MAGYARORSZÁGI RÉGIÓBAN 2012
 MŰSZAKI TUDOMÁNY AZ ÉSZAK-KELET MAGYARORSZÁGI RÉGIÓBAN 0 KONFERENCIA ELŐADÁSAI Szolnok 0. május 0. Szerkesztette: Edited by Pokorádi László Kiadja: Debreceni Akadémiai Bizottság Műszaki Szakbizottsága
MŰSZAKI TUDOMÁNY AZ ÉSZAK-KELET MAGYARORSZÁGI RÉGIÓBAN 0 KONFERENCIA ELŐADÁSAI Szolnok 0. május 0. Szerkesztette: Edited by Pokorádi László Kiadja: Debreceni Akadémiai Bizottság Műszaki Szakbizottsága
Rendszertan. Visszacsatolás és típusai, PID
 Rendszertan Visszacsatolás és típusai, PID Hangos Katalin Számítástudomány Alkalmazása Tanszék Rendszer- és Irányításelméleti Kutató Laboratórium MTA Számítástechnikai és Automatizálási Kutató Intézete
Rendszertan Visszacsatolás és típusai, PID Hangos Katalin Számítástudomány Alkalmazása Tanszék Rendszer- és Irányításelméleti Kutató Laboratórium MTA Számítástechnikai és Automatizálási Kutató Intézete
A készletezés Készlet: készletezés Indok Készlettípusok az igény teljesítés viszony szerint
 A készletezés Készlet: Olyan anyagi javak, amelyeket egy szervezet (termelő, vagy szolgáltatóvállalat, kereskedő, stb.) azért halmoz fel, hogy a jövőben alkalmas időpontban felhasználjon A készletezés
A készletezés Készlet: Olyan anyagi javak, amelyeket egy szervezet (termelő, vagy szolgáltatóvállalat, kereskedő, stb.) azért halmoz fel, hogy a jövőben alkalmas időpontban felhasználjon A készletezés
Egy emelt szintű érettségi feladat kapcsán Ábrahám Gábor, Szeged
 Egy emelt szintű érettségi feladat kapcsán Ábrahám Gábor, Szeged A 01. május 8.-i emelt szintű matematika érettségin szerepelt az alábbi feladat. Egy háromszög oldalhosszai egy számtani sorozat egymást
Egy emelt szintű érettségi feladat kapcsán Ábrahám Gábor, Szeged A 01. május 8.-i emelt szintű matematika érettségin szerepelt az alábbi feladat. Egy háromszög oldalhosszai egy számtani sorozat egymást
3. KÉTTÁMASZÚ ÖSZVÉRGERENDÁK
 3. KÉTTÁMASZÚ ÖSZVÉRGERENDÁK 3.1. BEVEZETÉS Kéttámaszú öszvérgerendák pozitív nyomaték hatására kialakuló ellenállását vizsgálva, meghatározható a hajlító nyomaték, függőleges nyíró erő és kombinációjuk
3. KÉTTÁMASZÚ ÖSZVÉRGERENDÁK 3.1. BEVEZETÉS Kéttámaszú öszvérgerendák pozitív nyomaték hatására kialakuló ellenállását vizsgálva, meghatározható a hajlító nyomaték, függőleges nyíró erő és kombinációjuk
7. Szisztolikus rendszerek (Eberhard Zehendner)
") 7. Szisztolikus rendszerek (Eberhard Zehendner) A szisztolikus rács a speciális feladatot ellátó számítógépek legtökéletesebb formája legegyszerubb esetben csupán egyetlen számítási muvelet ismételt végrehajtására
7. Szisztolikus rendszerek (Eberhard Zehendner) A szisztolikus rács a speciális feladatot ellátó számítógépek legtökéletesebb formája legegyszerubb esetben csupán egyetlen számítási muvelet ismételt végrehajtására
Gázhűtésű gyorsreaktor üzemanyagciklusának modellezése
 Gázhűtésű gyorsreaktor üzemanyagciklusának modellezése Szieberth Máté, Halász Máté, Fehér Sándor, Reiss Tibor 1 Budapesti Műszaki és Gazdaságtudományi Egyetem, Nukleáris Technikai Intézet 1111 Budapest,
Gázhűtésű gyorsreaktor üzemanyagciklusának modellezése Szieberth Máté, Halász Máté, Fehér Sándor, Reiss Tibor 1 Budapesti Műszaki és Gazdaságtudományi Egyetem, Nukleáris Technikai Intézet 1111 Budapest,
MATEMATIKA I. RÉSZLETES ÉRETTSÉGI VIZSGAKÖVETELMÉNY A) KOMPETENCIÁK
 KOMPETENCIÁK") MATEMATIKA I. RÉSZLETES ÉRETTSÉGI VIZSGAKÖVETELMÉNY Az érettségi követelményeit két szinten határozzuk meg: - középszinten a mai társadalomban tájékozódni és alkotni tudó ember matematikai ismereteit kell
MATEMATIKA I. RÉSZLETES ÉRETTSÉGI VIZSGAKÖVETELMÉNY Az érettségi követelményeit két szinten határozzuk meg: - középszinten a mai társadalomban tájékozódni és alkotni tudó ember matematikai ismereteit kell
Matematikai és matematikai statisztikai alapismeretek
 Kézirat a Matematikai és matematikai statisztikai alapismeretek című előadáshoz Dr. Győri István NEVELÉSTUDOMÁNYI PH.D. PROGRM 1999/2000 1 1. MTEMTIKI LPOGLMK 1.1. Halmazok Halmazon mindig bizonyos dolgok
Kézirat a Matematikai és matematikai statisztikai alapismeretek című előadáshoz Dr. Győri István NEVELÉSTUDOMÁNYI PH.D. PROGRM 1999/2000 1 1. MTEMTIKI LPOGLMK 1.1. Halmazok Halmazon mindig bizonyos dolgok