A Brüsszelátor dinamikája Shaun Ault és Erik Holmgreen dolgozata alapján (March 16, 2003)
|
|
|
- Gyula Illés
- 6 évvel ezelőtt
- Látták:
Átírás
1 A Brüsszelátor dinamikája Shaun Ault és Erik Holmgreen dolgozata alapján (March 16, 2003) Várdainé Kollár Judit szeminárium Budapest november 6.
2 1. Bevezetés: Belouszov Zsabotyinszkij-reakció: Ce(III) és a Ce(IV) keletkezése ciklikus - kálium-bromát és malonsav jelenlétében. Az alábbi egyenletek megmutatják az egyszerűsített folyamatot: Ce(III) Ce(IV ) Ce(IV ) + CHBr(COOH) 2 Ce(III) + Br + otherproducts
3 Mi szükséges ahhoz, hogy egy reakció oszcilláljon? A reakció legyen távol az egyensúlytól. A reakcióban legyenek autokatalikus lépések. A rendszernek legyen legalább két állandósult állapota. (bistabilitás)
4 Oszcilláló reakciók: gyártási folyamatokban a szívben az ingerközpont - a szinuszcsomó működését vezérli glükolitikus ciklusban előforduló köztes anyagcsere termékek koncentrációja
5 Az előző előadásokból ismeretes, hogy a kémiai kinetikai egyenletek a következő módon írhatók: A + B C + D [ A] = [Ḃ] = [Ċ] = [Ḋ] = r a = k[a][b] Kicsit összetettebb rendszer esetén, vegyük hozzá: 2A 3E [Ḃ] = [Ċ] = [Ḋ] = k[a][b] [ A] = k 3 [A][B] 2k 6 [A] 2 [Ė] = 3k 6[A] 2
6 2. A Brüsszelátor: (Ilya Prigogine) A X 2X + Y 3X B + X Y + C X D A Brüsszelátor dinamikája leírható egy kétdimenziós közönséges differenciálegyenlet-rendszerrel: Ẋ = a + X 2 Y bx X ahol X(t), Y (t) R, a, b > 0. Ẏ = bx X 2 Y, (1)
7 3. Dimenziómentes alak Transzformáció: t = τt, x(t) = ξx(t), y(t) = ηy (t) a τ, ξ és η ügyes választásával. (Dimenziómentes, ha: ξ = X(t) X, η = Y (t) Y ) Transzformálva: ẋ = ξa τ + 1 τξη x2 y b + 1 x τ ẏ = 1 τξ 2x2 y + b η τξ x Legyen: τ := 1 ξ := 1 a η := 1 ekkor : ẋ = 1 + ax 2 y (b + 1)x ẏ = a(bx ax 2 y)
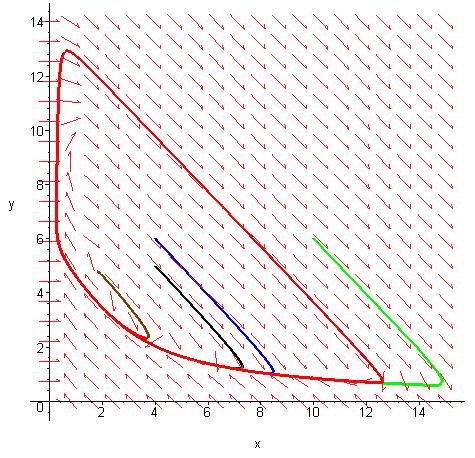
8 Fázisportré:
9 4. Egyensúly: A rendszer stacionárius pontjára kapjuk: 1 (b + 1) x + a x 2 ȳ = 0 b x a x 2 ȳ = 0, ahonnan: x = 1 ȳ = b/a.
10 5. Lineáris stabilitási analízis A rendszer Jacobi-mátrixa: Df(x, y) = ( x, ȳ) = (1, b/a)-t behelyettesítve: ( ) b 1 + 2axy ax 2 a(b 2axy) a 2 x 2, Df(1, b/a) = ( ) b 1 a ab a 2. Vizsgálva a stabilitást, kapjuk a nyomra és a determinánsra: τ = Trace(Df(1, b/a)) = b a 2 1 = Det(Df(1, b/a)) = a 2
11 stabilitas.nb 5 b instabil a
12
13 a > 0 = > 0 ( x, ȳ) nem nyeregpont > 0 és b < a 2 + 1, akkor τ < 0; attraktor > 0 és b = a = Hopf-bifurkáció > 0 és b > a 2 + 1, akkor τ > 0; repellor
14 6. A Hopf-bifurkáció megjelenése A Jacobi mátrix sajátértékei a λ 2 λ(b 1 a 2 ) + a 2 = 0 egyenletből kapjuk. b c = a esetén a sajátértékek tiszta képzetesek: 1. λ 1,2 (b) = ±ia 2. τ = b a 2 1 (b c = a = τ = 0) = a 2 = τ 2 4 < 0. Re(λ(b)) = 1 2 τ tehát Re(λ 1,2 (b)) b = 1 b=bc 2 b [b a2 1] = 1 2 0
15 7. b c = a közeli periódus Ha b = b c, akkor τ eltűnik, így λ = 1 2 (τ ± τ 2 4 ) = a 2 -ből: λ c = ±i és a közelítés periódusa: 2π/a. I(λ c ) = a
16 8. Nullavonalak: ẋ = 0 kijelölésével az ẋ nullavonalára kapjuk: 1 (b + 1)x + ax 2 y = 0 y = ẏ = 0 kijelölésével az ẏ nullavonalra kapjuk: (b + 1)x 1 ax 2 bx ax 2 y = 0 x(b axy) = 0 = x = 0 vagy: y = b ax (A második esetben a nullavonalon x = 0 nem lehetséges.)
17 Untitled-1 1 In[21]:= a := 1 b := 2.5 Hb + 1L x 1 y := a x 2 z := b a x Plot@8y, z<, 8x, 0.1, 4<D Out[25]= Graphics
18 9. Bendixson-zsák Hol metszi az x tengelyt az ẋ nullavonal? Az y = b ax 1 (b + 1)x + 0 = 0 = x = 1 b + 1 nullavonal és az x = 1 b+1 Megkonstruáljuk az "l" egyenest: y = metszéspontja adja: b(b + 1) a (c 1, c 2 ) (ẋ, ẏ) < 0 c 1 = c 2 = 1-t választva, elvégezzük a skalárszorzást, kapjuk: Ábrázolás után: 1 (b + 1)x + ax 2 y + abx a 2 x 2 y < 0 x > 1
19
20 Köszönöm a figyelmet! Várdai Judit vardai.judit@ymmfk.szie.hu
3. előadás Stabilitás
 Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
6. gyakorlat: Lineáris rendszerek fázisképei
 6. gyakorlat: Lineáris rendszerek fázisképei A fáziskép meghatározása az együtthatómátrix nyoma és determinánsa segítségével a következőképpen lehetséges. Az x'ax egyenletben ahol A a b az együtthatómátrix
6. gyakorlat: Lineáris rendszerek fázisképei A fáziskép meghatározása az együtthatómátrix nyoma és determinánsa segítségével a következőképpen lehetséges. Az x'ax egyenletben ahol A a b az együtthatómátrix
1.7. Elsőrendű lineáris differenciálegyenlet-rendszerek
 7 Elsőrendű lineáris differenciálegyenlet-rendszerek Legyen n N, I R intervallum és A: I M n n (R), B: I R n folytonos függvények, és tekintsük az { y (x) = A(x)y(x) + B(x) y(ξ) = η kezdeti érték problémát,
7 Elsőrendű lineáris differenciálegyenlet-rendszerek Legyen n N, I R intervallum és A: I M n n (R), B: I R n folytonos függvények, és tekintsük az { y (x) = A(x)y(x) + B(x) y(ξ) = η kezdeti érték problémát,
Fázisportrék. A Dinamikai rendszerek órákon bemutatott példarendszerek fázisportréi. Lineáris oszcillátor. v = ax bv
 Fázisportrék A Dinamikai rendszerek órákon bemutatott példarendszerek fázisportréi Lineáris oszcillátor ẋ=v v = ax bv a=0, b=0: centrum, konzervatív rendszer a=0, b=0,5: stabil fókusz, disszipatív rendszer
Fázisportrék A Dinamikai rendszerek órákon bemutatott példarendszerek fázisportréi Lineáris oszcillátor ẋ=v v = ax bv a=0, b=0: centrum, konzervatív rendszer a=0, b=0,5: stabil fókusz, disszipatív rendszer
Bevezetés az állapottér elméletbe: Állapottér reprezentációk
 Tartalom Bevezetés az állapottér elméletbe: Állapottér reprezentációk vizsgálata 1. Példa az állapottér reprezentációk megválasztására 2. Átviteli függvény és állapottér reprezentációk közötti kapcsolatok
Tartalom Bevezetés az állapottér elméletbe: Állapottér reprezentációk vizsgálata 1. Példa az állapottér reprezentációk megválasztására 2. Átviteli függvény és állapottér reprezentációk közötti kapcsolatok
8. DINAMIKAI RENDSZEREK
 8. DINAMIKAI RENDSZEREK A gyakorlat célja az, hogy egy kétváltozós reakciókinetikai rendszer vizsgálatával a hallgatók megismerjék a dinamikai rendszerek alapfogalmait, elsajátítsák a lineáris stabilitásvizsgálat
8. DINAMIKAI RENDSZEREK A gyakorlat célja az, hogy egy kétváltozós reakciókinetikai rendszer vizsgálatával a hallgatók megismerjék a dinamikai rendszerek alapfogalmait, elsajátítsák a lineáris stabilitásvizsgálat
7. DINAMIKAI RENDSZEREK
 7. DINAMIKAI RENDSZEREK Különböző folyamatok leírására különböző tudományterületeken állítanak fel olyan modelleket, amelyek nemlineáris közönséges autonóm differenciálegyenlet-rendszerre vezetnek. Ezek
7. DINAMIKAI RENDSZEREK Különböző folyamatok leírására különböző tudományterületeken állítanak fel olyan modelleket, amelyek nemlineáris közönséges autonóm differenciálegyenlet-rendszerre vezetnek. Ezek
8. DINAMIKAI RENDSZEREK
 8. DINAMIKAI RENDSZEREK Különböző folyamatok leírására különböző tudományterületeken állítanak fel olyan modelleket, amelyek nemlineáris közönséges autonóm differenciálegyenlet-rendszerre vezetnek. Ezek
8. DINAMIKAI RENDSZEREK Különböző folyamatok leírására különböző tudományterületeken állítanak fel olyan modelleket, amelyek nemlineáris közönséges autonóm differenciálegyenlet-rendszerre vezetnek. Ezek
Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek
 Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E
Bevezetés az algebrába 2 Differencia- és differenciálegyenlet-rendszerek Algebra Tanszék B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E
Bevezetés az algebrába 2
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Differencia- és differenciálegy.-rsz. H607 2017-04-05
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Bevezetés az algebrába 2 BMETE91AM37 Differencia- és differenciálegy.-rsz. H607 2017-04-05
Lotka Volterra-féle populációdinamikai modellek vizsgálata
 Eötvös Loránd Tudományegyetem Természettudományi Kar Alkalmazott Analízis és Számításmatematikai Tanszék Lotka Volterra-féle populációdinamikai modellek vizsgálata Szakdolgozat Készítette: Kiss Franciska
Eötvös Loránd Tudományegyetem Természettudományi Kar Alkalmazott Analízis és Számításmatematikai Tanszék Lotka Volterra-féle populációdinamikai modellek vizsgálata Szakdolgozat Készítette: Kiss Franciska
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Autonóm egyenletek, dinamikai rendszerek
 238 8. Autonóm egyenletek, dinamikai rendszerek 8.8. tétel. (Andronov Witt) 5 6 Ha a Γ periodikus pálya karakterisztikus multiplikátorainak abszolút értéke 1-nél kisebb, akkor a Γ pálya stabilis határciklus.
238 8. Autonóm egyenletek, dinamikai rendszerek 8.8. tétel. (Andronov Witt) 5 6 Ha a Γ periodikus pálya karakterisztikus multiplikátorainak abszolút értéke 1-nél kisebb, akkor a Γ pálya stabilis határciklus.
Kvadratikus alakok gyakorlás.
 Kvadratikus alakok gakorlás Kúpszeletek: Adott eg kvadratikus alak a következő formában: ax 2 + 2bx + c 2 + k 1 x + k 2 + d = 0, a, b, c, k 1, k 2, d R (1) Ezt felírhatjuk a x T A x + K x + d = 0 alakban,
Kvadratikus alakok gakorlás Kúpszeletek: Adott eg kvadratikus alak a következő formában: ax 2 + 2bx + c 2 + k 1 x + k 2 + d = 0, a, b, c, k 1, k 2, d R (1) Ezt felírhatjuk a x T A x + K x + d = 0 alakban,
Differenciálegyenletek gyakorlat december 5.
 Differenciálegyenletek gyakorlat Kocsis Albert Tihamér Németh Adrián 05 december 5 Ismétlés Integrálás Newton Leibniz-formula Integrálás és alapműveletek wwwwolframalphacom Alapintegrálok sin x dx = cos
Differenciálegyenletek gyakorlat Kocsis Albert Tihamér Németh Adrián 05 december 5 Ismétlés Integrálás Newton Leibniz-formula Integrálás és alapműveletek wwwwolframalphacom Alapintegrálok sin x dx = cos
Lineáris leképezések. 2. Lineáris-e az f : R 2 R 2 f(x, y) = (x + y, x 2 )
 = (x + y, x 2 )") Lineáris leképezések 1 Lineáris-e az f : R 2 R 2 f(x, y = (3x + 2y, x y leképezés? A linearitáshoz ellen riznünk kell, hogy a leképzés additív és homogén Legyen x = (x 1, R 2, y = (y 1, y 2 R 2, c R Ekkor
Lineáris leképezések 1 Lineáris-e az f : R 2 R 2 f(x, y = (3x + 2y, x y leképezés? A linearitáshoz ellen riznünk kell, hogy a leképzés additív és homogén Legyen x = (x 1, R 2, y = (y 1, y 2 R 2, c R Ekkor
Differenciálegyenletek december 13.
 Differenciálegyenletek 2018. december 13. Elsőrendű DE Definíció. Az elsőrendű differenciálegyenlet általános alakja y = f (x, y), ahol f (x, y) adott kétváltozós függvény. Minden y = y(x) függvény, amire
Differenciálegyenletek 2018. december 13. Elsőrendű DE Definíció. Az elsőrendű differenciálegyenlet általános alakja y = f (x, y), ahol f (x, y) adott kétváltozós függvény. Minden y = y(x) függvény, amire
Hamilton rendszerek, Lyapunov függvények és Stabilitás. Hamilton rendszerek valós dinamikai rendszerek, konzerva3v mechanikai rendszerek
 Hamilton rendszerek, Lyapunov függvények és Stabilitás Hamilton rendszerek valós dinamikai rendszerek, konzerva3v mechanikai rendszerek Sokszor nem lehetséges, hogy a tanult linearizációs módszerrel meghatározzuk
Hamilton rendszerek, Lyapunov függvények és Stabilitás Hamilton rendszerek valós dinamikai rendszerek, konzerva3v mechanikai rendszerek Sokszor nem lehetséges, hogy a tanult linearizációs módszerrel meghatározzuk
Kapari Dávid. Periodikus viselkedés kémiai reakciók differenciálegyenleteiben
 Eötvös Loránd Tudományegyetem Természettudományi Kar Kapari Dávid Periodikus viselkedés kémiai reakciók differenciálegyenleteiben BSc Szakdolgozat Témavezető: Simon L. Péter Alkalmazott Analízis és Számításmatematikai
Eötvös Loránd Tudományegyetem Természettudományi Kar Kapari Dávid Periodikus viselkedés kémiai reakciók differenciálegyenleteiben BSc Szakdolgozat Témavezető: Simon L. Péter Alkalmazott Analízis és Számításmatematikai
Tartalom. Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás
 Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
92 MAM143A előadásjegyzet, 2008/2009. x = f(t,x). x = f(x), (6.1)
. x = f(x), (6.1)") 9 MAM43A előadásjegyzet, 8/9 6. Stabilitáselmélet 6.. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x.
9 MAM43A előadásjegyzet, 8/9 6. Stabilitáselmélet 6.. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x.

Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9.
 9.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 9. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Differenciálegyenletek gyakorlat Matematika BSc II/2, elemző szakirány
 A sebesség fogalmának szemléltetése az Differenciálegyenletek gyakorlat Matematika BSc II/, elemző szakirány. gyakorlat ẋ(t) = lim h 0 x(t+h) x(t) h képlet alapján, ahol t jelöli az időt, x pedig az elmozdulást.
A sebesség fogalmának szemléltetése az Differenciálegyenletek gyakorlat Matematika BSc II/, elemző szakirány. gyakorlat ẋ(t) = lim h 0 x(t+h) x(t) h képlet alapján, ahol t jelöli az időt, x pedig az elmozdulást.
A KroneckerCapelli-tételb l következik, hogy egy Bx = 0 homogén lineáris egyenletrendszernek
 10. gyakorlat Mátrixok sajátértékei és sajátvektorai Azt mondjuk, hogy az A M n mátrixnak a λ IR szám a sajátértéke, ha létezik olyan x IR n, x 0 vektor, amelyre Ax = λx. Ekkor az x vektort az A mátrix
10. gyakorlat Mátrixok sajátértékei és sajátvektorai Azt mondjuk, hogy az A M n mátrixnak a λ IR szám a sajátértéke, ha létezik olyan x IR n, x 0 vektor, amelyre Ax = λx. Ekkor az x vektort az A mátrix
Tartalom. 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció)
") Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
differenciálegyenletek
 Állandó együtthatójú lineáris homogén differenciálegyenletek L[y] = y (n) + a 1y (n 1) + + a ny = 0 a i R (1) a valós, állandó együtthatójú lineáris homogén n-ed rendű differenciálegyenlet Megoldását y
Állandó együtthatójú lineáris homogén differenciálegyenletek L[y] = y (n) + a 1y (n 1) + + a ny = 0 a i R (1) a valós, állandó együtthatójú lineáris homogén n-ed rendű differenciálegyenlet Megoldását y
Differenciálegyenletek
 Differenciálegyenletek feladatgyűjtemény Tóth János Simon L. Péter Csikja Rudolf 013. augusztus 6. Tartalomjegyzék Előszó 3 Jelölések 4 I. Feladatok 7 1. Bevezető feladatok 8. Alapok 13.1. Elemi kvalitatív
Differenciálegyenletek feladatgyűjtemény Tóth János Simon L. Péter Csikja Rudolf 013. augusztus 6. Tartalomjegyzék Előszó 3 Jelölések 4 I. Feladatok 7 1. Bevezető feladatok 8. Alapok 13.1. Elemi kvalitatív
Vektorterek. =a gyakorlatokon megoldásra ajánlott
 Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Ha ismert (A,b,c T ), akkor
, akkor") Az eddigiekben feltételeztük, hogy a rendszer állapotát mérni tudjuk. Az állapot ismerete szükséges az állapot-visszacsatolt szabályzó tervezéséhez. Ha nem ismerjük az x(t) állapotvektort, akkor egy olyan
Az eddigiekben feltételeztük, hogy a rendszer állapotát mérni tudjuk. Az állapot ismerete szükséges az állapot-visszacsatolt szabályzó tervezéséhez. Ha nem ismerjük az x(t) állapotvektort, akkor egy olyan
Differenciálegyenlet rendszerek
 Differenciálegyenlet rendszerek (A kezdeti érték probléma. Lineáris differenciálegyenlet rendszerek, magasabb rendű lineáris egyenletek.) Szili László: Modellek és algoritmusok ea+gyak jegyzet alapján
Differenciálegyenlet rendszerek (A kezdeti érték probléma. Lineáris differenciálegyenlet rendszerek, magasabb rendű lineáris egyenletek.) Szili László: Modellek és algoritmusok ea+gyak jegyzet alapján
"Flat" rendszerek. definíciók, példák, alkalmazások
 "Flat" rendszerek definíciók, példák, alkalmazások Hangos Katalin, Szederkényi Gábor szeder@scl.sztaki.hu, hangos@scl.sztaki.hu 2006. október 18. flatness - p. 1/26 FLAT RENDSZEREK: Elméleti alapok 2006.
"Flat" rendszerek definíciók, példák, alkalmazások Hangos Katalin, Szederkényi Gábor szeder@scl.sztaki.hu, hangos@scl.sztaki.hu 2006. október 18. flatness - p. 1/26 FLAT RENDSZEREK: Elméleti alapok 2006.
3. Fékezett ingamozgás
 3. Fékezett ingamozgás A valóságban mindig jelen van valamilyen csillapítás. A gázban vagy folyadékban való mozgásnál, kis sebesség esetén a csillapítás arányos a sebességgel. Ha az vagy az ''+k sin =0,
3. Fékezett ingamozgás A valóságban mindig jelen van valamilyen csillapítás. A gázban vagy folyadékban való mozgásnál, kis sebesség esetén a csillapítás arányos a sebességgel. Ha az vagy az ''+k sin =0,
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
1. zárthelyi,
 1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
Norma Determináns, inverz Kondíciószám Direkt és inverz hibák Lin. egyenletrendszerek A Gauss-módszer. Lineáris algebra numerikus módszerei
 Indukált mátrixnorma Definíció A. M : R n n R mátrixnormát a. V : R n R vektornorma által indukált mátrixnormának nevezzük, ha A M = max { Ax V : x V = 1}. Az indukált mátrixnorma geometriai jelentése:
Indukált mátrixnorma Definíció A. M : R n n R mátrixnormát a. V : R n R vektornorma által indukált mátrixnormának nevezzük, ha A M = max { Ax V : x V = 1}. Az indukált mátrixnorma geometriai jelentése:
ö ö ú ö í Ĺ ö ź Í ö í ö ö í ö ę ö ö ö ů đ Ö ź đ Á öö ź í ú ź ń ź ú źú í ö ú ű ú ö ź ź ł í ö ď ö í í ö í Ĺ Í ź í í ű ű ö í Í
 ö í í Ĺ É Í É É Á É ÍÉ Ü Á É Í Á É Á É Ü Ę É Á Ą ł É Á ł ł É É Ĺ ł í Ö ź í í ú ź ź í ź ę ź Ü íá Ł ź ö ö ú ö í Ĺ ö ź Í ö í ö ö í ö ę ö ö ö ů đ Ö ź đ Á öö ź í ú ź ń ź ú źú í ö ú ű ú ö ź ź ł í ö ď ö í í ö
ö í í Ĺ É Í É É Á É ÍÉ Ü Á É Í Á É Á É Ü Ę É Á Ą ł É Á ł ł É É Ĺ ł í Ö ź í í ú ź ź í ź ę ź Ü íá Ł ź ö ö ú ö í Ĺ ö ź Í ö í ö ö í ö ę ö ö ö ů đ Ö ź đ Á öö ź í ú ź ń ź ú źú í ö ú ű ú ö ź ź ł í ö ď ö í í ö
2. REZGÉSEK Harmonikus rezgések: 2.2. Csillapított rezgések
 . REZGÉSEK.1. Harmonikus rezgések: Harmonikus erő: F = D x D m ẍ= D x (ezt a mechanikai rendszert lineáris harmonikus oszcillátornak nevezik) (Oszcillátor körfrekvenciája) ẍ x= Másodrendű konstansegyütthatós
. REZGÉSEK.1. Harmonikus rezgések: Harmonikus erő: F = D x D m ẍ= D x (ezt a mechanikai rendszert lineáris harmonikus oszcillátornak nevezik) (Oszcillátor körfrekvenciája) ẍ x= Másodrendű konstansegyütthatós
Mátrixok 2017 Mátrixok
 2017 számtáblázatok" : számok rendezett halmaza, melyben a számok helye két paraméterrel van meghatározva. Például lineáris egyenletrendszer együtthatómátrixa 2 x 1 + 4 x 2 = 8 1 x 1 + 3 x 2 = 1 ( 2 4
2017 számtáblázatok" : számok rendezett halmaza, melyben a számok helye két paraméterrel van meghatározva. Például lineáris egyenletrendszer együtthatómátrixa 2 x 1 + 4 x 2 = 8 1 x 1 + 3 x 2 = 1 ( 2 4
y = y 0 exp (ax) Y (x) = exp (Ax)Y 0 A n x n 1 (n 1)! = A I + d exp (Ax) = A exp (Ax) exp (Ax)
 Y (x) = exp (Ax)Y 0 A n x n 1 (n 1)! = A I + d exp (Ax) = A exp (Ax) exp (Ax)") III Az exp (Ax mátrixfüggvény módszere Ha y = ay, y( = y, a = állandó y = y exp (ax d dx [exp (Ax] = Y = AY, Y ( = Y, Y (x = exp (AxY exp (Ax = I + n= A n x n (n! = A A n x n, n! ] A n x n I + = A exp
III Az exp (Ax mátrixfüggvény módszere Ha y = ay, y( = y, a = állandó y = y exp (ax d dx [exp (Ax] = Y = AY, Y ( = Y, Y (x = exp (AxY exp (Ax = I + n= A n x n (n! = A A n x n, n! ] A n x n I + = A exp
Lineáris algebra Gyakorló feladatok
 Lineáris algebra Gyakorló feladatok. október.. Feladat: Határozzuk meg a, 4b, c és a b c vektorokat, ha a = (; ; ; ; b = (; ; ; ; c = ( ; ; ; ;.. Feladat: Határozzuk meg a, 4b, a, c és a b; c + b kifejezések
Lineáris algebra Gyakorló feladatok. október.. Feladat: Határozzuk meg a, 4b, c és a b c vektorokat, ha a = (; ; ; ; b = (; ; ; ; c = ( ; ; ; ;.. Feladat: Határozzuk meg a, 4b, a, c és a b; c + b kifejezések
Lin.Alg.Zh.1 feladatok
 LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
Gazdasági matematika II. vizsgadolgozat megoldása, június 10
 Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
9. Előadás. (9. előadás) Lineáris egyr.(3.), Sajátérték április / 35
 Lineáris egyr.(3.), Sajátérték április / 35") 9. Előadás (9. előadás) Lineáris egyr.(3.), Sajátérték 2019. április 24. 1 / 35 Portfólió-analízis Tegyük fel, hogy egy bank 4 különböző eszközbe fektet be (réz, búza, arany és kakaó). Az ügyfeleinek ezen
9. Előadás (9. előadás) Lineáris egyr.(3.), Sajátérték 2019. április 24. 1 / 35 Portfólió-analízis Tegyük fel, hogy egy bank 4 különböző eszközbe fektet be (réz, búza, arany és kakaó). Az ügyfeleinek ezen
Lineáris leképezések (előadásvázlat, szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
Geometria II gyakorlatok
 Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2012. május 8. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2012. május 8. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
5.1. Autonóm nemlineáris rendszerek
 5. Stabilitáselmélet 87 5. Stabilitáselmélet 5.1. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x).
5. Stabilitáselmélet 87 5. Stabilitáselmélet 5.1. Autonóm nemlineáris rendszerek Legyen f : R R n R n. Ekkor az általános elsőrendű explicit nemlineáris differenciálegyenletrendszer alakja x = f(t,x).
Í ú Ö ź ő ő ľ ľ ő Ö ľ ő ý ó ü ů ľ ú ń ö ů ű ö ó ź ü ź ó ő ľ ľ ő ź ń ź ő ő ö ó ő ľ ö đ ď ú ś ő ó ź óĺ Í ď ó ľ ö ő ő đ ö ę ó ö ű ź ź ó ľ ľő ľ ő ó ö ő ő
 ó ő ů ő ő ő ő ü ő ó ľ ú ü ü ť ő É ľ É ÉÉ ą Ú ľ É Í ľľ ą ą ą ą ł Ą É Ü É ľ É ą Ą ó ľ ü ľ ü ő ő ü Ö ö ü ő ü ľ ü ł ć ő ľ ü ö ő ú đ ü źů ö ź ľ ó ľő ü ľ ľ É ľ Ą Đ Í ú Ö ź ő ő ľ ľ ő Ö ľ ő ý ó ü ů ľ ú ń ö ů ű
ó ő ů ő ő ő ő ü ő ó ľ ú ü ü ť ő É ľ É ÉÉ ą Ú ľ É Í ľľ ą ą ą ą ł Ą É Ü É ľ É ą Ą ó ľ ü ľ ü ő ő ü Ö ö ü ő ü ľ ü ł ć ő ľ ü ö ő ú đ ü źů ö ź ľ ó ľő ü ľ ľ É ľ Ą Đ Í ú Ö ź ő ő ľ ľ ő Ö ľ ő ý ó ü ů ľ ú ń ö ů ű
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8.
 8.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Differenciálegyenletek gyakorlat Matematika BSc II/2, elemző szakirány
 Differenciálegyenletek gyakorlat Matematika BSc II/, elemző szakirány 1. gyakorlat Bevezető mese: pillanatnyi sebesség, mozgásegyenlet, radioaktív bomlás, populációdinamika. Differenciálegyenlet, iránymező,
Differenciálegyenletek gyakorlat Matematika BSc II/, elemző szakirány 1. gyakorlat Bevezető mese: pillanatnyi sebesség, mozgásegyenlet, radioaktív bomlás, populációdinamika. Differenciálegyenlet, iránymező,
Állapottér modellek tulajdonságai PTE PMMK MI BSc 1
 Állapottér modelle tulajdonságai 28..22. PTE PMMK MI BSc Kalman-féle rendszer definíció Σ (T, X, U, Y, Ω, Γ, ϕ, η) T az időhalmaz X a lehetséges belső állapoto halmaza U a lehetséges bemeneti értée halmaza
Állapottér modelle tulajdonságai 28..22. PTE PMMK MI BSc Kalman-féle rendszer definíció Σ (T, X, U, Y, Ω, Γ, ϕ, η) T az időhalmaz X a lehetséges belső állapoto halmaza U a lehetséges bemeneti értée halmaza
6. feladatsor: Inhomogén lineáris differenciálegyenletek (megoldás)
") Matematika Ac gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 017/18 ősz 6. feladatsor: Inhomogén lineáris differenciálegyenletek (megoldás) 1. Írjunk fel egy olyan legalacsonyabbrendű valós,
Matematika Ac gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 017/18 ősz 6. feladatsor: Inhomogén lineáris differenciálegyenletek (megoldás) 1. Írjunk fel egy olyan legalacsonyabbrendű valós,
λx f 1 (x) e λx f 2 (x) λe λx f 2 (x) + e λx f 2(x) e λx f 2 (x) Hasonlóan általában is elérhető sorműveletekkel, hogy csak f (j)
 e λx f 2 (x) λe λx f 2 (x) + e λx f 2(x) e λx f 2 (x) Hasonlóan általában is elérhető sorműveletekkel, hogy csak f (j)") Matematika A3 gyakorlat Energetika és Mechatronika BSc szakok, 016/17 ősz 10 feladatsor: Magasabbrendű lineáris differenciálegyenletek (megoldás) 1 Határozzuk meg az e λx, xe λx, x e λx,, x k 1 e λx függvények
Matematika A3 gyakorlat Energetika és Mechatronika BSc szakok, 016/17 ősz 10 feladatsor: Magasabbrendű lineáris differenciálegyenletek (megoldás) 1 Határozzuk meg az e λx, xe λx, x e λx,, x k 1 e λx függvények
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Í Ú É Ö Ö ý ä Ö Ö Í É Ö Ö ľľ ľ ľ ŕ ľ ľ ä ť ä
 ľ ľ Í Ú É Ö Ö ý ä Ö Ö Í É Ö Ö ľľ ľ ľ ŕ ľ ľ ä ť ä ü Í ď É ľ ú Í Ö É Ö Ú Ú ę ú Ö Í đ ť É ÁšÄ Ö É ä ŕ Ü Í Í Í Í ń Ö Í Í Äń Đ ü ü Í Ľ ř Ú Ň Ą Ü Í Í Ó Í Í Ö Í Ó ż źď ľä Ę Ęľ ŕ ť Í ľ ä ü ą ő ť ő ő Ö ď ľť ľ ť
ľ ľ Í Ú É Ö Ö ý ä Ö Ö Í É Ö Ö ľľ ľ ľ ŕ ľ ľ ä ť ä ü Í ď É ľ ú Í Ö É Ö Ú Ú ę ú Ö Í đ ť É ÁšÄ Ö É ä ŕ Ü Í Í Í Í ń Ö Í Í Äń Đ ü ü Í Ľ ř Ú Ň Ą Ü Í Í Ó Í Í Ö Í Ó ż źď ľä Ę Ęľ ŕ ť Í ľ ä ü ą ő ť ő ő Ö ď ľť ľ ť
Differenciálegyenletek és dinamikai rendszerek
 Differenciálegyenletek és dinamikai rendszerek Simon L. Péter Eötvös Loránd Tudományegyetem Matematikai Intézet Alkalmazott Analízis és Számításmatematikai Tanszék 2012 Tartalomjegyzék 1. Bevezetés 4 1.1.
Differenciálegyenletek és dinamikai rendszerek Simon L. Péter Eötvös Loránd Tudományegyetem Matematikai Intézet Alkalmazott Analízis és Számításmatematikai Tanszék 2012 Tartalomjegyzék 1. Bevezetés 4 1.1.
sin x = cos x =? sin x = dx =? dx = cos x =? g) Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!
 Adja meg a helyettesítéses integrálás szabályát határozott integrálokra vonatkozóan!") Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
Matematika előadás elméleti kérdéseinél kérdezhető képletek Analízis II Határozatlan integrálszámítás g) t = tg x 2 helyettesítés esetén mivel egyenlő sin x = cos x =? g) t = tg x 2 helyettesítés esetén
1. Transzformációk mátrixa
 1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
Eötvös Loránd Tudományegyetem Természettudományi Kar
 Eötvös Loránd Tudományegyetem Természettudományi Kar Kaotikus Differenciálegyenletek Szakdolgozat Chmelik Gábor Matematika B.Sc., Matematikai elemző szakirány Témavezető: Simon L. Péter, egyetemi docens
Eötvös Loránd Tudományegyetem Természettudományi Kar Kaotikus Differenciálegyenletek Szakdolgozat Chmelik Gábor Matematika B.Sc., Matematikai elemző szakirány Témavezető: Simon L. Péter, egyetemi docens
5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11
![5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11](/thumbs/93/113569557.jpg "5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11") Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
Differenciálegyenletek megoldása Laplace-transzformációval. Vajda István március 21.
 Analízis előadások Vajda István 2009. március 21. A módszer alkalmazásának feltételei: Állandó együtthatós, lineáris differenciálegyenletek megoldására használhatjuk. A módszer alkalmazásának feltételei:
Analízis előadások Vajda István 2009. március 21. A módszer alkalmazásának feltételei: Állandó együtthatós, lineáris differenciálegyenletek megoldására használhatjuk. A módszer alkalmazásának feltételei:
A MATEMATIKA NÉHÁNY KIHÍVÁSA
 A MATEMATIKA NÉHÁNY KIHÍVÁSA NAPJAINKBAN Simon L. Péter ELTE, Matematikai Intézet Alkalmazott Analízis és Számításmatematikai Tsz. 1 / 20 MATEMATIKA AZ ÉLET KÜLÖNBÖZŐ TERÜLETEIN Kaotikus sorozatok és differenciálegyenletek,
A MATEMATIKA NÉHÁNY KIHÍVÁSA NAPJAINKBAN Simon L. Péter ELTE, Matematikai Intézet Alkalmazott Analízis és Számításmatematikai Tsz. 1 / 20 MATEMATIKA AZ ÉLET KÜLÖNBÖZŐ TERÜLETEIN Kaotikus sorozatok és differenciálegyenletek,
Az elméleti mechanika alapjai
 Az elméleti mechanika alapjai Tömegpont, a továbbiakban részecske. A jelenségeket a háromdimenziós térben és időben játszódnak le: r helyzetvektor v dr dt ṙ, a dr dt r a részecske sebessége illetve gyorsulása.
Az elméleti mechanika alapjai Tömegpont, a továbbiakban részecske. A jelenségeket a háromdimenziós térben és időben játszódnak le: r helyzetvektor v dr dt ṙ, a dr dt r a részecske sebessége illetve gyorsulása.
1. A Hilbert féle axiómarendszer
 {Euklideszi geometria} 1. A Hilbert féle axiómarendszer Az axiómarendszer alapfogalmai: pont, egyenes, sík, illeszkedés (pont egyenesre, pont síkra, egyenes síkra), közte van reláció, egybevágóság (szögeké,
{Euklideszi geometria} 1. A Hilbert féle axiómarendszer Az axiómarendszer alapfogalmai: pont, egyenes, sík, illeszkedés (pont egyenesre, pont síkra, egyenes síkra), közte van reláció, egybevágóság (szögeké,
Testek. 16. Legyen z = 3 + 4i, w = 3 + i. Végezzük el az alábbi. a) (2 4), Z 5, b) (1, 0, 0, 1, 1) (1, 1, 1, 1, 0), Z 5 2.
 (2 4), Z 5, b) (1, 0, 0, 1, 1) (1, 1, 1, 1, 0), Z 5 2.") Vektorok. Melyek egyenlőek az alábbi vektorok közül? (a) (, 2, 0), (b) az (, 0, ) pontból a (2, 2, ) pontba mutató vektor, (c) ( 2,, ) ( 2,, 2), (d) [ 2 0 ], (e) 2. 0 2. Írjuk fel az x + y + 2z = 0 és
Vektorok. Melyek egyenlőek az alábbi vektorok közül? (a) (, 2, 0), (b) az (, 0, ) pontból a (2, 2, ) pontba mutató vektor, (c) ( 2,, ) ( 2,, 2), (d) [ 2 0 ], (e) 2. 0 2. Írjuk fel az x + y + 2z = 0 és
Tamás Réka. Másodrendű közönséges differenciálegyenletek és szerepük a numerikus modellezésben
 Eötvös Loránd Tudományegyetem Természettudományi Kar Tamás Réka Másodrendű közönséges differenciálegyenletek és szerepük a numerikus modellezésben BSc Szakdolgozat Matematika BSc, Matematikai elemező szakirány
Eötvös Loránd Tudományegyetem Természettudományi Kar Tamás Réka Másodrendű közönséges differenciálegyenletek és szerepük a numerikus modellezésben BSc Szakdolgozat Matematika BSc, Matematikai elemező szakirány
Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait.
 Közönséges differenciálegyenletek Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait. Célunk a függvény meghatározása Egyetlen független
Közönséges differenciálegyenletek Meghatározás: Olyan egyenlet, amely a független változók mellett tartalmaz egy vagy több függvényt és azok deriváltjait. Célunk a függvény meghatározása Egyetlen független
í ó ń ó É í ő ő ü ő Í ź ą ó ź đő ź ü ó íń ú í ö ö í ü ő ď ü ę ó ó ę ő ď ú ü ú ź ó í ő ó í í ó ö ö ö ö ű ę ó ź ä í ó ó ó ő ő ó ó ó ú ü Ó ű ź ö ź í ú í
 ő É ő ó ő ü ę Ĺ ý ą É í ö ő ő ý ő í í ę ý ö ő í ý ü ł ć Ĺ ü ő ú í í ő ü ď ö ó í ó ó ó ü ő ü ó ő ŕ ú ö ó ő í ó ő ź ü ó í í ó ö ö í ó í ú ó ü ę í ę ö ö óđ ú ö ü Ĺ ý ú ü ó ę ö ő ő ä ź í ö ü ę ú í źů ź í í
ő É ő ó ő ü ę Ĺ ý ą É í ö ő ő ý ő í í ę ý ö ő í ý ü ł ć Ĺ ü ő ú í í ő ü ď ö ó í ó ó ó ü ő ü ó ő ŕ ú ö ó ő í ó ő ź ü ó í í ó ö ö í ó í ú ó ü ę í ę ö ö óđ ú ö ü Ĺ ý ú ü ó ę ö ő ő ä ź í ö ü ę ú í źů ź í í
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Äł Á Ŕ. ÁáÔ. ęôá. ą Á
 Ó ö ö ô ś Ö Ś üü Ö Ö Ö Ü ź Ö Ó Ó Ö Ö Ö Ő Ö Ő Ö Ö ą Ó Ö Ö Ó Ó Ö Ó ŕ Ó Ö Ö Ó Ö ě Ś ż ŕ Ö ŕ ą ŕ ą ŕ Ö Ó ŕ ŕ ŕ ŕ ŕ ŕ ř ő Ö ć ť ź ś ś Š š ś ą ę ś Ö ś Ö Ý Ó ö Ď ć Ö śš żö Ö ö Ö Ö ô ö ő ć ą ś ň Ó ą ą Ú É Ó ę
Ó ö ö ô ś Ö Ś üü Ö Ö Ö Ü ź Ö Ó Ó Ö Ö Ö Ő Ö Ő Ö Ö ą Ó Ö Ö Ó Ó Ö Ó ŕ Ó Ö Ö Ó Ö ě Ś ż ŕ Ö ŕ ą ŕ ą ŕ Ö Ó ŕ ŕ ŕ ŕ ŕ ŕ ř ő Ö ć ť ź ś ś Š š ś ą ę ś Ö ś Ö Ý Ó ö Ď ć Ö śš żö Ö ö Ö Ö ô ö ő ć ą ś ň Ó ą ą Ú É Ó ę
Abszolútértékes egyenlôtlenségek
 Abszolútértékes egyenlôtlenségek 575. a) $, $ ; b) < - vagy $, # - vagy > 4. 5 576. a) =, =- 6, 5 =, =-, 7 =, 4 = 5; b) nincs megoldás;! c), = - ; d) =-. Abszolútértékes egyenlôtlenségek 577. a) - # #,
Abszolútértékes egyenlôtlenségek 575. a) $, $ ; b) < - vagy $, # - vagy > 4. 5 576. a) =, =- 6, 5 =, =-, 7 =, 4 = 5; b) nincs megoldás;! c), = - ; d) =-. Abszolútértékes egyenlôtlenségek 577. a) - # #,
 ö ö ü ü ű ö Í ö ö ö ű Í ü ű ö ö ö ü ű ö ö ö ö ö Í ű ű ü ü Ó ű ö ö É ü ö ö ö ü ü É ö ü ö Á ü Á ű ü ű ű ű ű Í ÍÁ ü ö ö ö ü ü ü É ü ü Á ö ü ü ö ö ű ü ö ü ü ü ö ü ü ü ö ü ü ü ö ö ü ű ö ű ü ö ü ü ö ű ü Í ü
ö ö ü ü ű ö Í ö ö ö ű Í ü ű ö ö ö ü ű ö ö ö ö ö Í ű ű ü ü Ó ű ö ö É ü ö ö ö ü ü É ö ü ö Á ü Á ű ü ű ű ű ű Í ÍÁ ü ö ö ö ü ü ü É ü ü Á ö ü ü ö ö ű ü ö ü ü ü ö ü ü ü ö ü ü ü ö ö ü ű ö ű ü ö ü ü ö ű ü Í ü
 Í ű Á Á ű ü ü ü ű Í ü ü ü ü Í ű ű ü ü ű ü ü ű ü Í Í É Á Á Á É Á Ö Á Á Á ü É Ó Á Á Á Á É É Á ű É É Á ű ű Á Í Á Í É Á Á Á Á Á Á Ó Á ű ű ü ű ű ű ű ű ü ű Ó ü ű ü ü ű ü ű Í Í ü ű ü ü ü ü ü ű ü ű ü ü ü ü ü ű
Í ű Á Á ű ü ü ü ű Í ü ü ü ü Í ű ű ü ü ű ü ü ű ü Í Í É Á Á Á É Á Ö Á Á Á ü É Ó Á Á Á Á É É Á ű É É Á ű ű Á Í Á Í É Á Á Á Á Á Á Ó Á ű ű ü ű ű ű ű ű ü ű Ó ü ű ü ü ű ü ű Í Í ü ű ü ü ü ü ü ű ü ű ü ü ü ü ü ű
 ó ö ó Í Í Ó Í Á Í Í Í Ó Ú ó Í Ó ó Ó ó Í Ó Ó Ó Ó Ó Ó Ó ó Á Ó Ó ó ö ó Ú Í Í Ó Ó Ó Í Ó Ú É Í Í Í Ú Ó ő Í Í Ó Ó Ú Ó Ó ó Í ó Á Ó Ó Ó ó ó Í Ó Ó Ó Ó Ó Í Ú Í Í É ö Ó Ó Í Ó Ú Ó Ú Ó Ö Í Í Ú Ó Ó ó Ű Ó Ó Ó Ó Ó Ó Ó
ó ö ó Í Í Ó Í Á Í Í Í Ó Ú ó Í Ó ó Ó ó Í Ó Ó Ó Ó Ó Ó Ó ó Á Ó Ó ó ö ó Ú Í Í Ó Ó Ó Í Ó Ú É Í Í Í Ú Ó ő Í Í Ó Ó Ú Ó Ó ó Í ó Á Ó Ó Ó ó ó Í Ó Ó Ó Ó Ó Í Ú Í Í É ö Ó Ó Í Ó Ú Ó Ú Ó Ö Í Í Ú Ó Ó ó Ű Ó Ó Ó Ó Ó Ó Ó
Matematika II képletek. 1 sin xdx =, cos 2 x dx = sh 2 x dx = 1 + x 2 dx = 1 x. cos xdx =,
 Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Matematika II előadás elméleti kérdéseinél kérdezhető képletek Matematika II képletek Határozatlan Integrálszámítás x n dx =, sin 2 x dx = sin xdx =, ch 2 x dx = sin xdx =, sh 2 x dx = cos xdx =, + x 2
Geometria II gyakorlatok
 Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2011. november 29. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2011. november 29. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Differenciálegyenletek numerikus megoldása
 a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
I. Vektorok. Adott A (2; 5) és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:
 és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:") I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
ú Í ű ů ý ź ú ę ź ź ź ú ú ź źą ú ź ź ü ü ź ź ę Ĺ ź ü Ĺ ź ź ü ę ę ę ź ú ź źů ú ű ź
 ź ü Ę ü ü Ĺ ü ť ü ú Í ü ź ú ź Í ú ű ü ź ź ü ź ú ů ü ű ď ü ü ę ű ű ź ú Ĺ ź ę ú ü ű ú Í ű ů ý ź ú ę ź ź ź ú ú ź źą ú ź ź ü ü ź ź ę Ĺ ź ü Ĺ ź ź ü ę ę ę ź ú ź źů ú ű ź ź ź ź ú ź ź ú ď ú ź ď ü ź ď ú Á ę ú ú
ź ü Ę ü ü Ĺ ü ť ü ú Í ü ź ú ź Í ú ű ü ź ź ü ź ú ů ü ű ď ü ü ę ű ű ź ú Ĺ ź ę ú ü ű ú Í ű ů ý ź ú ę ź ź ź ú ú ź źą ú ź ź ü ü ź ź ę Ĺ ź ü Ĺ ź ź ü ę ę ę ź ú ź źů ú ű ź ź ź ź ú ź ź ú ď ú ź ď ü ź ď ú Á ę ú ú
Statikailag határozatlan tartó vizsgálata
 Statikailag határozatlan tartó vizsgálata Készítette: Hénap Gábor henapg@mm.bme.hu E E P MT A y F D E E d B MT p C x a b c Adatok: a = m, p = 1 N, b = 3 m, F = 5 N, c = 4 m, d = 5 mm. m A kés bbikekben
Statikailag határozatlan tartó vizsgálata Készítette: Hénap Gábor henapg@mm.bme.hu E E P MT A y F D E E d B MT p C x a b c Adatok: a = m, p = 1 N, b = 3 m, F = 5 N, c = 4 m, d = 5 mm. m A kés bbikekben
Keresztmetszet másodrendű nyomatékainak meghatározása
 BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
Megoldások MATEMATIKA II. VIZSGA (VK) NBT. NG. NMH. SZAKOS HALLGATÓK RÉSZÉRE (Kérjük, hogy a megfelelő szakot jelölje be!
 NBT. NG. NMH. SZAKOS HALLGATÓK RÉSZÉRE (Kérjük, hogy a megfelelő szakot jelölje be!") MATEMATIKA II. VIZSGA (VK) NBT. NG. NMH. SZAKOS HALLGATÓK RÉSZÉRE (Kérjük, hogy a megfelelő szakot jelölje be!) 2016. JANUÁR 21. Elérhető pontszám: 50 pont Megoldások 1. 6. 2. 7. 3. 8. 4. 9. 5. Össz.:
MATEMATIKA II. VIZSGA (VK) NBT. NG. NMH. SZAKOS HALLGATÓK RÉSZÉRE (Kérjük, hogy a megfelelő szakot jelölje be!) 2016. JANUÁR 21. Elérhető pontszám: 50 pont Megoldások 1. 6. 2. 7. 3. 8. 4. 9. 5. Össz.:
4. Lineáris rendszerek
 60 Hartung Ferenc: Differenciálegyenletek, MA22i, MA623d, 2006/07 4 Lineáris rendszerek 4 Lineáris algebrai előismeretek Legyen A egy n n-es mátrix, I az n n-es egységmátrix A pλ := deta λi n-edfokú polinomot
60 Hartung Ferenc: Differenciálegyenletek, MA22i, MA623d, 2006/07 4 Lineáris rendszerek 4 Lineáris algebrai előismeretek Legyen A egy n n-es mátrix, I az n n-es egységmátrix A pλ := deta λi n-edfokú polinomot
A szimplex algoritmus
 A szimplex algoritmus Ismétlés: reprezentációs tétel, az optimális megoldás és az extrém pontok kapcsolata Alapfogalmak: bázisok, bázismegoldások, megengedett bázismegoldások, degenerált bázismegoldás
A szimplex algoritmus Ismétlés: reprezentációs tétel, az optimális megoldás és az extrém pontok kapcsolata Alapfogalmak: bázisok, bázismegoldások, megengedett bázismegoldások, degenerált bázismegoldás
Elhangzott tananyag óránkénti bontásban
 TTK, Matematikus alapszak Differenciálegyenletek (Előadás BMETE93AM03; Gyakorlat BME TE93AM04) Elhangzott tananyag óránkénti bontásban 2016. február 15. 1. előadás. Közönséges differenciálegyenlet fogalma.
TTK, Matematikus alapszak Differenciálegyenletek (Előadás BMETE93AM03; Gyakorlat BME TE93AM04) Elhangzott tananyag óránkénti bontásban 2016. február 15. 1. előadás. Közönséges differenciálegyenlet fogalma.
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Károlyi Katalin Eötvös Loránd Tudományegyetem Alkalmazott Analízis Tanszék. Abstract
 KÖZÖNSÉGES DIFFERENCIÁLEGYENLETEK TÖBBPONTOS PEREMÉRTÉK PROBLÉMÁI Károlyi Katalin Eötvös Loránd Tudományegyetem Alkalmazott Analízis Tanszék 1117 Budapest, Pázmány Péter sétány 1/c. (karolyik@cs.elte.hu)
KÖZÖNSÉGES DIFFERENCIÁLEGYENLETEK TÖBBPONTOS PEREMÉRTÉK PROBLÉMÁI Károlyi Katalin Eötvös Loránd Tudományegyetem Alkalmazott Analízis Tanszék 1117 Budapest, Pázmány Péter sétány 1/c. (karolyik@cs.elte.hu)
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika rendszerek Irányítástechnika Budapest, 2008 2 Az előadás felépítése 1. 2. 3. 4. Irányítástechnika Budapest, 2008
 ő ü ő ę ü ő ő ő ź ę ü í ú ü í ő ő ö ő í ý É ö í ü ü í ď ý í ź ý Ĺ ö ö źú ő ü ý ő ő ü ź ď ę ö ö í í ö ú ő ź ő ý ő ő ö ü ź ő ę í Ĺ ę ő ő ő í ü ź í ö ę í ö ö ő ú ę í ő ü í ő ő ő ę í ő ü ü ę í đ ö ę đ ü ź
ő ü ő ę ü ő ő ő ź ę ü í ú ü í ő ő ö ő í ý É ö í ü ü í ď ý í ź ý Ĺ ö ö źú ő ü ý ő ő ü ź ď ę ö ö í í ö ú ő ź ő ý ő ő ö ü ź ő ę í Ĺ ę ő ő ő í ü ź í ö ę í ö ö ő ú ę í ő ü í ő ő ő ę í ő ü ü ę í đ ö ę đ ü ź
L-transzformáltja: G(s) = L{g(t)}.
 = L{g(t)}.") Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Lin.Alg.Zh.1 feladatok
 Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
ú ö ő ö ő ź í ő ö ő ą ö ő đö ź ő í ö ő ö í ö Á É Í ö Ą Í ł É Ü É ł Á łů łá É ł ł ł ő Á ą Á Á Đ Á Ü łá
 ő Ĺ ź ő ü đ Ł Ą Ő Ĺ ü ü ő ő í í ő ü í ö É đ ú ő ź í ő ö łí ę ő ö ő ę ö ö ź đ í ź ű łí ő ő ő ő ö Ĺ ł ź ź ő ö ö í ő ö ö ü ö ö Ĺ ź ö ü ö ö đ ö ő ú ö ő ö ő ź í ő ö ő ą ö ő đö ź ő í ö ő ö í ö Á É Í ö Ą Í ł
ő Ĺ ź ő ü đ Ł Ą Ő Ĺ ü ü ő ő í í ő ü í ö É đ ú ő ź í ő ö łí ę ő ö ő ę ö ö ź đ í ź ű łí ő ő ő ő ö Ĺ ł ź ź ő ö ö í ő ö ö ü ö ö Ĺ ź ö ü ö ö đ ö ő ú ö ő ö ő ź í ő ö ő ą ö ő đö ź ő í ö ő ö í ö Á É Í ö Ą Í ł
CSATOLT REZGÉSEK Kedves barátom, Skrapits Lajos tanár úr emlékére
 CSATOLT REZGÉSEK Kedves barátom, Skrapits Lajos tanár úr emlékére Schipp Ferenc ELTE IK umerikus Analízis Tanszék A szabadon esô rugó fizikája Húsz évvel ezelôtt az ELTE Általános Fizika Tanszék hagyományos
CSATOLT REZGÉSEK Kedves barátom, Skrapits Lajos tanár úr emlékére Schipp Ferenc ELTE IK umerikus Analízis Tanszék A szabadon esô rugó fizikája Húsz évvel ezelôtt az ELTE Általános Fizika Tanszék hagyományos
ü ú ö í ü ü ű ü ö ú í í ű Ĺ í ö ü ö ű ü í í í ü ú í ö ĺ í ö ű ĺ í í ü ü íĺ ö ü Í ď ť Ą
 ü ú í ľ í Á ö ű ö ú ö í ö í ü ö ú ü ö í ü ü í ö ű í ű ü í í í í Á ú ű í í ű ü ö ö í ű í í ü ü ú ö í ü ü ű ü ö ú í í ű Ĺ í ö ü ö ű ü í í í ü ú í ö ĺ í ö ű ĺ í í ü ü íĺ ö ü Í ď ť Ą ű í í ö ö ü ű í ö ö í
ü ú í ľ í Á ö ű ö ú ö í ö í ü ö ú ü ö í ü ü í ö ű í ű ü í í í í Á ú ű í í ű ü ö ö í ű í í ü ü ú ö í ü ü ű ü ö ú í í ű Ĺ í ö ü ö ű ü í í í ü ú í ö ĺ í ö ű ĺ í í ü ü íĺ ö ü Í ď ť Ą ű í í ö ö ü ű í ö ö í
Matematika II. 1 sin xdx =, 1 cos xdx =, 1 + x 2 dx =
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
MODELLEZÉS - SZIMULÁCIÓ
 Mechatronika = Mechanikai elemek+ elektromechanikai átalakítók+ villamos rendszerek+ számítógép elemek integrációja Eszközök, rendszerek, gépek és szerkezetek felügyeletére, vezérlésére (manapság miniatürizált)
Mechatronika = Mechanikai elemek+ elektromechanikai átalakítók+ villamos rendszerek+ számítógép elemek integrációja Eszközök, rendszerek, gépek és szerkezetek felügyeletére, vezérlésére (manapság miniatürizált)
Saj at ert ek-probl em ak febru ar 26.
 Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre