Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra
|
|
|
- Alajos Orsós
- 6 évvel ezelőtt
- Látták:
Átírás
1 Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra
2 Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? ASZ 1 1 s 1 s e Y SZ = 1 T 1 s 1 T s
3 A zárt szabályozási kör vizsgálata xz xa xr YR YZ YSZ xs xa + xr - xa + Y0 - xa WZÁRT YR xs xs xm YSZ xs Y 0 =Y R Y SZ Y0 W zárt = 1 Y 0 3
4 Megfontolások mindig a zárt kör viselkedésére vagyunk kíváncsiak Miért igyekszünk mégis vizsgálatainkat visszavezetni a felnyitott kör elemzésére? xa + - xa xs Y0 WZÁRT xs Y 0 =Y R Y SZ Y0 W zárt = 1 Y 0 4
5 Az eddig tárgyalt összefüggések Mit és mivel? zárt kör felnyitott kör alapjel zavarás és zavaró jellemző Milyen céllal? időtartomány frekvenciatartomány Laplace operátoros tartomány fázistartalék erősítési tartalék gyorsaság maradó hiba a zavarás szerepe stabilitás Mikor, hol? pontosság beállási idő MEGFELELŐ SZABÁLYOZÓ VÁLASZTÁSA 5
6 Pontosság a hibajel állandósult állapotbeli (t ) értékére vagyunk kíváncsiak Miért számolunk Laplace operátoros tartományban a végértéktétellel? Miért kategorizálunk? felnyitott kört alapjelet zavarás hatáspályát zavaró jellemzőt
7 Pontosság rendszerezés, kategorizálás összehasonlítás szabályozási kör alapjel összehasonlítás szabályozási kör zavarás (zavaró jellemző és zavarás hatáspálya együttes hatása)
8 Tipikus jelek 0 típusú 1 típusú X a s = X z s = xa0 j a 1 s x z0 s j z 1 8
9 Átviteli függvények a zárt körben hibaátviteli függvény a zavaró jellemzőre vonatkozó hibaátviteli függvény a felnyitott kör átviteli függvénye Y 0 =K 1i Y 0* s általános alakban a zavarás hatáspálya átviteli Y =K 1 Y * z z z z függvénye általános alakban s W ra = W rz = X r s 1 1 = = X a s 1 Y R Y SZ 1 Y 0 X r s Y Z Y Z = = X z s 1 Y R Y SZ 1 Y 0 xz xa xr YR YZ YSZ xs 9
: jz+z < = felnyitott kör típusa (hányszorosan integráló jellegű): i 010.11.1. 10")
10 Pontosság: az alapjel követése és zavarelhárítás alapjel típusa (hányszorosan integráló jellegű): ja xz xr YR YSZ xs < = > xa YZ > zavarás típusa (hányszorosan integráló jellegű): jz+z < = felnyitott kör típusa (hányszorosan integráló jellegű): i

11 xz xa xr YR YZ YSZ xs Pontosság 1 * Y 0 =K i Y 0 s * lim Y 0=1 s 0 t s lim x r t ~ K t
12 Stabilitás a zárt kör stabilitását vizsgáljuk Routh-Hurwitz stabilitási kritérium: WZÁRT nevezője mint karakterisztikus polinom alapján nem tudunk közvetlen összefüggést teremteni a szabályozó paraméterei és a stabilitás mértéke között hasonló a helyzet a Mihajlov-Leonhard kritériummal xa + xs Y 0 =Y R Y SZ x x s a Y0 WZÁRT Y W zárt = 0 1 Y 0 1
13 Stabilitás a zárt kör karakterisztikus egyenletének gyökei és a zárt kör átmeneti függvénye

14 Fázistartalék és erősítési tartalék
15 Stabilitás a zárt kör stabilitásának eldöntéséhez a felnyitott kör vizsgálatát használjuk eszköz: frekvenciaátviteli függvény tartalékok értelmezése helygörbe (Nyquist diagram) Bode diagram fázistartalék erősítési tartalék Y 0 =Y R Y SZ Y0 W zárt = 1 Y 0 lehetőség önmagában instabil felnyitott kör vizsgálatára is
16 Stabilitás stabil felnyitott kör vizsgálata egyszerűsített Nyquist stabilitási kritérium lehetőség önmagában instabil (jobb oldali pólusokkal rendelkező) felnyitott kör vizsgálatára is általános Nyquist stabilitási kritérium

17 Ökölszabály a stabilitás biztosítására
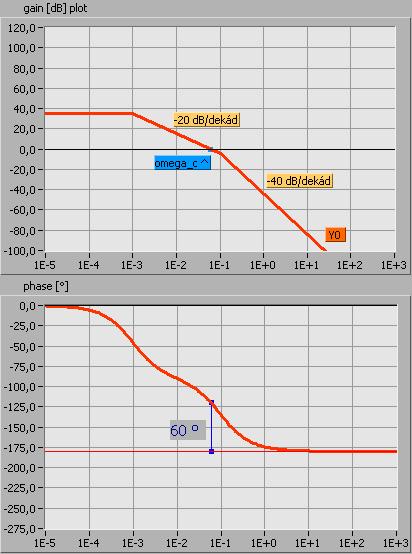
18 Stabilitás j 0 Y 0 j = A0 e A0 c =1 0 c t = 30 t 60 lengő 60 t aperiodikus
19 Zárt kör közelítő átviteli függvénye a frekvenciatartományban eszköz a zárt kör közelítésére a felnyitott kör átviteli tulajdonságai alapján Nem a régi s durva közelítés... Vagy mégis?

20 Kis πhenő Nem a régi s durva közelítés, Mi szótól szóig így kijön Betűiket számlálva. Ludolph eredménye már, Ha itt végezzük húsz jegyen. De rendre kijő még tíz pontosan, Azt is bízvást ígérhetem. Szász Pál, matematikus (195)
: Archimedes első durva közelítése")
: Archimedes néhány évvel")
 is")

21 π nap március 14. (3.14): Archimedes első durva közelítése után július. (/7=3,14857): Archimedes néhány évvel későbbi pontosabb közlítése π-percet és π-másodpercet (3/14, 1:59:6) is ünnepelnek ef01310f9e1d4f970c-800wi 1

22 πhent agyúaknak π napra (3.14) 41bf8f353ef010a937cbe6970b800wi 3, ,1,,3,3,4,5,5,5,8,6,9
23 "A π-érték kőkori kiszámítása, avagy a kör négyszögesítése" Varga Csaba: Az elme eredete (FRÍG Kiadó, 009) c. könyve alapján
24 A π-érték kőkori kiszámítása vegyük a kör átmérőjének 1/9 részét és szorozzuk meg 8-al d d 8 8 =d 9 9 a kapott négyzet területe elegendően pontosan közelíti a kör területét π közelítő értéke: 8 4 =4 0,7901=3,
 http://en.")
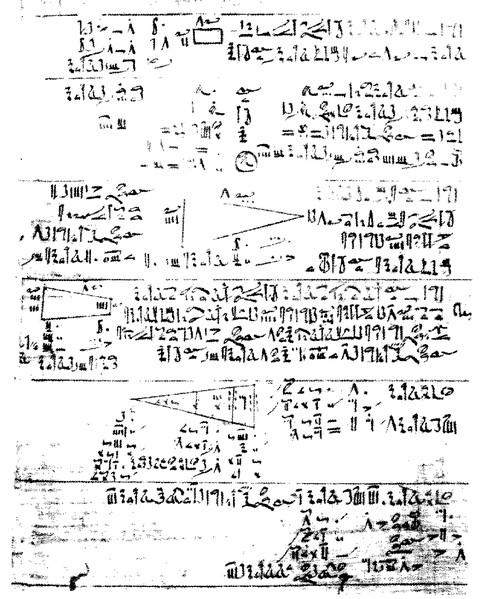
25 Egyiptomi gyökerek Rhind matematikai papirusz (Kr.e. 1650)
26 =81 18= =81 9 8= =63,
27 Adalékok számneveinkhez Varga Csaba: A kőkor élő nyelve (FRÍG Kiadó, 003) c. könyve alapján KÖRönc KÜLenc KILenc egy NYÚLc NYŐLc NYOLc kör(ül), k(ív)ül növekedés LC, NC L: műveltető -C: gyakorlatot vagy kicsinyítést jelent két HÁROM négy öt hat hét NYOLC KILENC 7
28 Közelítő megfontolások B [db] Y0-0 ω Wzárt ω << ω c lg ω ω c<< ω c Y0 >> 1 Y0 << 1-40 Y0 Y0 c : W zárt = =1 1 Y 0 Y Y0 Y0 c : W zárt = =Y 0 1 Y 0 1 8
29 A felnyitott kör és a zárt kör kapcsolata Y 0 j közelítő megfontolások: W zárt j = 1 Y 0 j állandósult állapot: Y 0 j statikus pontosság 1 Y j 1 0 Im tranziens átmenet: lengési hajlam -1 Y 0 j f t 1 Y 0 j ϕt 1+Y0 1 Re ωc Y0 Y0 9
30 M-görbe és N-görbe xa WZÁRT xs Y 0 =Y R Y SZ Y0 W zárt = 1 Y 0 xa + - Y0 xs Y 0 j M = 1 Y 0 j Y 0 j N =arg 1 Y 0 j

31 M-görbe és N-görbe
32 M=állandó függvények ábrázolása z a b j M= = =1 z=? 1 z 1 a b j z = 1 z a b = a 1 b a = a 1 M =1 z= 0, I m R e 3
33 M=állandó függvények ábrázolása z a b j M= = =10 1 z 1 a b j 10 a 1 b = a b 100 a a 1 b =a b 99a 00a b = a a b =
34 M=állandó függvények ábrázolása z a b j M= = =10 1 z 1 a b j a a b = a b = a 0= b0 =0 r= Im Re 34

35 M=állandó függvények ábrázolása
36 Gyorsaság j 0 Y 0 j = A0 e A0 c =1 0 c t = 3 10 t s c c
37 Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság statikus (maradó) hiba állandósult állapotban kör- vagy hurokerősítés (kisfrekvenciás erősítés) fordított arányosság gyorsaság szabályozási (beállási) idő vágási körfrekvencia fordított arányosság stabilitás lengési hajlam fázistartalék, erősítési tartalék 1 lim x r t ~ K t t s c c 30 t 60 lengő 60 t aperiodikus 37
38 Követelmények PONTOSSÁG 1 lim x r t ~ K t K nő B [db] K ωc -0 hiba csökken ts csökken ϕ t csökken Y0-40 GYORSASÁG 3 10 t c s c tranziens mozgás állandósult állapot ϕ lg ω 0 STABILITÁS 30 t 60 lengő 60 t aperiodikus lg ω -90 ϕt
39 Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZ Y SZ xs T H s e Y SZ = 1 T 1 s 1 T s domináns póluspár Csáki F., Bars R.: Automatika 39

40 Ideális PID szabályozó 1 Y PID =A p 1 T D s = Ti s A p 1 T i s T D T i s Tis

41 Megvalósítható PID-szabályozó A 1 T T s T T T T s T s 1 p i 1 D i 1 i D Y PID =A p 1 = T i s 1 T 1 s T i s 1 T 1 s A p 1 T i s T D T i s 1 Y PID =A p 1 T D s = Ti s Tis

42 A PID-szabályozó család többi tagja
43 Arányos egytárolós (P-T1) szakasz Milyen szabályozót érdemes választani? T H s e Y SZ = 1 T 1 s 1 T s Az ábra forrása Csáki F., Bars R.: Automatika
44 Holtidős (H) szakasz Milyen szabályozót érdemes választani? T H s e Y SZ = 1 T 1 s 1 T s Az ábra forrása Csáki F., Bars R.: Automatika
45 Arányos kéttárolós (P-T) szakasz Milyen szabályozót érdemes választani? T H s e Y SZ = 1 T 1 s 1 T s Az ábra forrása Csáki F., Bars R.: Automatika T1 T 45
46 Arányos egy(- vagy két)tárolós szakasz holtidővel Milyen szabályozót érdemes választani? T H s e Y SZ = 1 T 1 s 1 T s Az ábra forrása Csáki F., Bars R.: Automatika
47 Arányos kéttárolós szakasz holtidővel Milyen szabályozót érdemes választani? T H s e Y SZ = 1 T 1 s 1 T s Az ábra forrása Csáki F., Bars R.: Automatika T1 T 47
SZABÁLYOZÁSI KÖRÖK 2.
 Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika jellemzőinek Rendszerek stabilitása és minőségi jellemzői. Soros kompenzátor. Irányítástechnika Budapest, 29 2 Az
Irányítástechnika Elıadás. Zárt szabályozási körök stabilitása
 Irányítástechnika 2 7. Elıadás Zárt szabályozási körök stabilitása Irodalom - Csáki Frigyes, Bars Ruth: Automatika.1974 - Mórocz István: Irányítástechnika I. Analóg szabályozástechnika. 1996 - Benjamin
Irányítástechnika 2 7. Elıadás Zárt szabályozási körök stabilitása Irodalom - Csáki Frigyes, Bars Ruth: Automatika.1974 - Mórocz István: Irányítástechnika I. Analóg szabályozástechnika. 1996 - Benjamin
Szabályozás Irányítástechnika PE MIK MI BSc 1
 Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 5. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból
 Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Segédlet a gyakorlati tananyaghoz GEVAU141B, GEVAU188B c. tantárgyakból 1 Átviteli tényező számítása: Lineáris rendszer: Pl1.: Egy villanymotor 100V-os bemenő jelre 1000 fordulat/perc kimenő jelet ad.
Az egységugrás függvény a 0 időpillanatot követően 10 nagyságú jelet ad, valamint K=2. Vizsgáljuk meg a kimenetet:
 II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
II Gyakorlat A gyakorlat célja, hogy megismerkedjük az egyszerű szabályozási kör stabilitásának vizsgálati módszerét, valamint a PID szabályzó beállításának egy lehetséges módját. Tekintsük az alábbi háromtárolós
Számítógépes gyakorlat Irányítási rendszerek szintézise
 Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat Irányítási rendszerek szintézise Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Lineáris rendszerek stabilitása
 Lineáris rendszerek stabilitása A gyakrlat célja A dlgzatban a lineáris rendszerek stabilitásának fgalmát vezetjük be majd megvizsgáljuk a stabilitás vizsgálati módszereket. Elméleti bevezető Egy LTI rendszer
Lineáris rendszerek stabilitása A gyakrlat célja A dlgzatban a lineáris rendszerek stabilitásának fgalmát vezetjük be majd megvizsgáljuk a stabilitás vizsgálati módszereket. Elméleti bevezető Egy LTI rendszer
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Rendszer és irányításelmélet Rendszerek idő és frekvencia tartományi vizsgálata Irányítástechnika Budapest, 29 2 Az előadás felépítése
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
ÉRZÉKELŐK ÉS BEAVATKOZÓK II. 5. DC MOTOROK SZABÁLYOZÁS FORDULATSZÁM- SZABÁLYOZÁS Dr. Soumelidis Alexandros 2019.03.13. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT
L-transzformáltja: G(s) = L{g(t)}.
 = L{g(t)}.") Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
Tartalom 1. Stabilitáselmélet stabilitás feltételei inverz inga egyszerűsített modellje 2. Zárt, visszacsatolt rendszerek stabilitása Nyquist stabilitási kritérium Bode stabilitási kritérium 2018 1 Stabilitáselmélet
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata.
 1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
1. Az automatizálás célja, és irányított berendezés, technológia blokkvázlata. Az automatizálás célja gép, együttműködő gépcsoport, berendezés, eszköz, műszer, részegység minél kevesebb emberi beavatkozással
Irányítástechnika 2. előadás
 Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
MECHATRONIKA Mechatronika alapképzési szak (BSc) záróvizsga kérdései. (Javítás dátuma: )
 záróvizsga kérdései. (Javítás dátuma: )") MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
MECHATRONIKA 2010 Mechatronika alapképzési szak (BSc) záróvizsga kérdései (Javítás dátuma: 2016.12.20.) A FELKÉSZÜLÉS TÉMAKÖREI A számozott vizsgakérdések a rendezett felkészülés érdekében vastag betűkkel
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Alaptagok Nyquist és Bode diagramjai
 Alaptagok Nyquist és Bode diagramjai Luspay Tamás, Bauer Péter BME Közlekedésautomatikai Tanszék 212. január 1. 1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik
Alaptagok Nyquist és Bode diagramjai Luspay Tamás, Bauer Péter BME Közlekedésautomatikai Tanszék 212. január 1. 1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik
2. Folytonos lineáris rendszerek leírása az id!-, az operátor- és a frekvenciatartományban
 Önellen!rz! kérdések 1. Bevezetés 1. Ismertessen néhány tipikus irányítási feladatot! 2. Definiálja az irányítás m!veletét, ismertesse a kézi és automatikus irányítás közötti különbséget! 3. Ismertesse
Önellen!rz! kérdések 1. Bevezetés 1. Ismertessen néhány tipikus irányítási feladatot! 2. Definiálja az irányítás m!veletét, ismertesse a kézi és automatikus irányítás közötti különbséget! 3. Ismertesse
Tartalom. Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra
 Tartalom Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra 2015 1 Robusztus stabilitás Szabályozási rendszer tervezésének gyakorlati problémája az, hogy az aktuális rendszer G(s) átviteli
Tartalom Robusztus stabilitás Additív hibastruktúra Multiplikatív hibastruktúra 2015 1 Robusztus stabilitás Szabályozási rendszer tervezésének gyakorlati problémája az, hogy az aktuális rendszer G(s) átviteli
Alaptagok Nyquist- és Bode-diagramjai
 C Alaptagok Nyquist- és Bode-diagramjai C.1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik módja az átviteli függvények segítségével történik. Az átviteli függvényeket
C Alaptagok Nyquist- és Bode-diagramjai C.1. Bevezetés - Átviteli függvény, frekvenciafüggvény Dinamikus rendszerek leírásának egyik módja az átviteli függvények segítségével történik. Az átviteli függvényeket
1. Fejezet. Visszacsatolt erősítők. Elektronika 2 (BMEVIMIA027)
") Elektronika (MEVIMI07) Fejezet Visszacsatolt erősítők visszacsatolás célja: az erősítő paramétereinek igények szerinti megváltoztatása visszacsatolás elve (a J jel : vagy feszültség, vagy áram): J ki =
Elektronika (MEVIMI07) Fejezet Visszacsatolt erősítők visszacsatolás célja: az erősítő paramétereinek igények szerinti megváltoztatása visszacsatolás elve (a J jel : vagy feszültség, vagy áram): J ki =
Irányítástechnika labor Elméleti összefoglaló
 Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Irányítástechnika labor Elméleti összefoglaló Irányítástechnikai lapfogalmak Az irányítás egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. A folyamat változása külső, belső hatások
Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás Jelen gyűjtő munkát készítette Fölföldi Konrád,
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Irányítástechnika II. Nem hivatalos vizsga beugró kérdéssor kidolgozás Jelen gyűjtő munkát készítette Fölföldi Konrád,
Elhangzott gyakorlati tananyag óránkénti bontásban. Mindkét csoport. Rövidítve.
 TTK, Matematikus alapszak Differenciálegyenletek 1 (BMETE93AM15) Elhangzott gyakorlati tananyag óránkénti bontásban Mindkét csoport Rövidítve 1 gyakorlat 017 szeptember 7 T01 csoport Elsőrendű közönséges
TTK, Matematikus alapszak Differenciálegyenletek 1 (BMETE93AM15) Elhangzott gyakorlati tananyag óránkénti bontásban Mindkét csoport Rövidítve 1 gyakorlat 017 szeptember 7 T01 csoport Elsőrendű közönséges
Digitális jelfeldolgozás
 Digitális jelfeldolgozás Átviteli függvények Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. október 13. Digitális
Digitális jelfeldolgozás Átviteli függvények Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. október 13. Digitális
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
FOLYAMATIRÁNYÍTÁSI RENDSZEREK
 Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
Budapesti Műszaki és Gazdaságtudományi Egyetem Vegyészmérnöki és Biomérnöki Kar Kémiai és Környezeti Folyamatmérnöki Tanszék Írta: MIZSEY PÉTER Lektorálta: BÉKÁSSYNÉ MOLNÁR ERIKA FOLYAMATIRÁNYÍTÁSI RENDSZEREK
Dr. Gyurcsek István. Példafeladatok. Helygörbék Bode-diagramok HELYGÖRBÉK, BODE-DIAGRAMOK DR. GYURCSEK ISTVÁN
 Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Dr. Gyurcsek István Példafeladatok Helygörbék Bode-diagramok 1 2016.11.11.. Helygörbe szerkesztése VIZSGÁLAT: Mi a következménye annak, ha az áramkör valamelyik jellemző paramétere változik? Helygörbe
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
ELLENŐRZŐ KÉRDÉSEK. Váltakozóáramú hálózatok
 ELLENŐRZŐ KÉRDÉSEK Váltakozóáramú hálózatok Háromfázisú hálózatok Miért használunk többfázisú hálózatot? Mutassa meg a háromfázisú rendszer fontosabb jellemzőit és előnyeit az egyfázisú rendszerrel szemben!
ELLENŐRZŐ KÉRDÉSEK Váltakozóáramú hálózatok Háromfázisú hálózatok Miért használunk többfázisú hálózatot? Mutassa meg a háromfázisú rendszer fontosabb jellemzőit és előnyeit az egyfázisú rendszerrel szemben!
Programozható vezérlő rendszerek. Szabályozástechnika
 - a legtöbb ipari rendszer tartalmaz valamiféle szabályozási feladatot (pozicionálás) - cél: a folyamat egyes paramétereinek megadott határokon belül tartása - a PLC ezeket képes lekezelni (analóg I/O)
- a legtöbb ipari rendszer tartalmaz valamiféle szabályozási feladatot (pozicionálás) - cél: a folyamat egyes paramétereinek megadott határokon belül tartása - a PLC ezeket képes lekezelni (analóg I/O)
Irányítástechnika. II. rész. Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu
 Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Irányítástechnika II. rész Dr. Turóczi Antal turoczi.antal@nik.uni-obuda.hu Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Szabályozástechnika II.
 TÁMOP-4.1.1.F-14/1/KONV-215-9 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika II. Pécs 215 A tananyag
TÁMOP-4.1.1.F-14/1/KONV-215-9 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika II. Pécs 215 A tananyag
Irányítástechnika 4. előadás
 Iránítátechnika 4. előadá Dr. Kovác Levente 3. 4. 3. 3.5.. artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi
Iránítátechnika 4. előadá Dr. Kovác Levente 3. 4. 3. 3.5.. artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi
Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium
 Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium 4.. Két- és háromállású szabályozók. A két- és háromállású szabályozók nem-olytonos kimenettel
Két- és háromállású szabályozók. A szabályozási rendszer válasza és tulajdonságai. Popov stabilitási kritérium 4.. Két- és háromállású szabályozók. A két- és háromállású szabályozók nem-olytonos kimenettel
Tartalom. 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció)
") Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Folyamatirányítás. Számítási gyakorlatok. Gyakorlaton megoldandó feladatok. Készítette: Dr. Farkas Tivadar
 Folyamatirányítás Számítási gyakorlatok Gyakorlaton megoldandó feladatok Készítette: Dr. Farkas Tivadar 2010 I.-II. RENDŰ TAGOK 1. feladat Egy tökéletesen kevert, nyitott tartályban folyamatosan meleg
Folyamatirányítás Számítási gyakorlatok Gyakorlaton megoldandó feladatok Készítette: Dr. Farkas Tivadar 2010 I.-II. RENDŰ TAGOK 1. feladat Egy tökéletesen kevert, nyitott tartályban folyamatosan meleg
Számítógépes gyakorlat MATLAB, Control System Toolbox
 Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
Számítógépes gyakorlat MATLAB, Control System Toolbox Bevezetés A gyakorlatok célja az irányítási rendszerek korszerű számítógépes vizsgálati és tervezési módszereinek bemutatása, az alkalmazáshoz szükséges
VIK A3 Matematika, Gyakorlati anyag 2.
 VIK A3 Matematika, Gyakorlati anyag 2. 208. november Sorok. Konvergensek-e az alábbi sorok? Ha igen, adjuk meg a határértéküket! n(n+3) n(n+)(n+2) 9n 2 3n 2 ( n + 2 2 n + + n) 2n+ n 2 (n+) 2 (f) ( 3) k+2
VIK A3 Matematika, Gyakorlati anyag 2. 208. november Sorok. Konvergensek-e az alábbi sorok? Ha igen, adjuk meg a határértéküket! n(n+3) n(n+)(n+2) 9n 2 3n 2 ( n + 2 2 n + + n) 2n+ n 2 (n+) 2 (f) ( 3) k+2
IRÁNYÍTÁSTECHNIKAI ALAPOK. Erdei István Grundfos South East Europe Kft.
 IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
IRÁNYÍTÁSTECHNIKAI ALAPOK Erdei István Grundfos South East Europe Kft. Irányítástechnika felosztása Vezérléstechnika Szabályozástechnika Miért szabályozunk? Távhő rendszerek üzemeltetése Ø A fogyasztói
1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel
 1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel eltolt Dirac impulzusokból áll. Adja meg a hordozó jel I (s) T Laplace-transzformáltját és annak
1.A matematikai mintavételezés T mintavételi idővel felfogható modulációs eljárásnak, ahol a hordozó jel eltolt Dirac impulzusokból áll. Adja meg a hordozó jel I (s) T Laplace-transzformáltját és annak
pont) Írja fel M struktúrában a parametrikus bizonytalansággal jellemzett
 Írja fel M struktúrában a parametrikus bizonytalansággal jellemzett") Irányításelmélet MSc (Tipikus példák) Gáspár Péter 1. Egyértelmű-e az irányíthatósági állapottér reprezentáció? Egyértelműe a diagonális állapottér reprezentáció? 2. Adja meg az állapotmegfigyelhetőség
Irányításelmélet MSc (Tipikus példák) Gáspár Péter 1. Egyértelmű-e az irányíthatósági állapottér reprezentáció? Egyértelműe a diagonális állapottér reprezentáció? 2. Adja meg az állapotmegfigyelhetőség
Irányítástechnika II. előadásvázlat
 Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
Irányítástechnika II. előadásvázlat Dr. Bokor József egyetemi tanár, az MTA rendes tagja BME Közlekedés- és Járműirányítási Tanszék 2018 1 Tartalom Irányítástechnika II. féléves tárgytematika Az irányításelmélet
PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A ROBOTPILÓTÁK IRÁNYÍTÁSTECHNIKAI MINŐSÉGI KÖVETELMÉNYEI
 Dr. Szegedi Péter PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A cikkben a Szojka-III pilóta nélküli repülőgép repülésmechanikai matematikai modelljei vizsgálatainak eredményeit
Dr. Szegedi Péter PILÓTA NÉLKÜLI REPÜLŐGÉP NEMIRÁNYÍTOTT OLDALIRÁNYÚ MOZGÁSÁNAK VIZSGÁLATA A cikkben a Szojka-III pilóta nélküli repülőgép repülésmechanikai matematikai modelljei vizsgálatainak eredményeit
Márkus Zsolt Tulajdonságok, jelleggörbék, stb BMF -
 Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
Márkus Zsolt markus.zsolt@qos.hu Tulajdonságok, jelleggörbék, stb. 1 A hatáslánc részegységekből épül fel, melyek megvalósítják a jelátvitelt. A jelátviteli sajátosságok jellemzésére (leírására) létrehozott
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN. 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1
 DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Mechatronika alapjai órai jegyzet
 - 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
- 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
Hurokegyenlet alakja, ha az áram irányával megegyező feszültségeséseket tekintjük pozitívnak:
 Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Első gyakorlat A gyakorlat célja, hogy megismerkedjünk Matlab-SIMULINK szoftverrel és annak segítségével sajátítsuk el az Automatika c. tantárgy gyakorlati tananyagát. Ezen a gyakorlaton ismertetésre kerül
Frekvenciatartomány Irányítástechnika PE MI BSc 1
 Frekvenciatartomány ny 008.03.4. Irányítátechnika PE MI BSc Frekvenciatartomány bevezetéének indoka: általában időtartománybeli válaz kell alkalmazott teztelek i ezt indokolák információ rendzerek eetében
Frekvenciatartomány ny 008.03.4. Irányítátechnika PE MI BSc Frekvenciatartomány bevezetéének indoka: általában időtartománybeli válaz kell alkalmazott teztelek i ezt indokolák információ rendzerek eetében
17/1. Négypólusok átviteli függvényének ábrázolása. Nyquist diagram.
 7/. Négypólusok átviteli függvényének ábrázolása. Nyquist diagram. A szinuszos áramú hálózatok vizsgálatánál gyakran alkalmazunk különbözı komplex átviteli függvényeket. Végezzük ezt a hálózat valamilyen
7/. Négypólusok átviteli függvényének ábrázolása. Nyquist diagram. A szinuszos áramú hálózatok vizsgálatánál gyakran alkalmazunk különbözı komplex átviteli függvényeket. Végezzük ezt a hálózat valamilyen
3. előadás Stabilitás
 Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
Irányításelmélet és technika I.
 Irányításelmélet és technika I Folytonos idejű rendszerek leírása az állapottérben Állapotvisszacsatolást alkalmazó szabályozási körök Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki
Irányításelmélet és technika I Folytonos idejű rendszerek leírása az állapottérben Állapotvisszacsatolást alkalmazó szabályozási körök Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki
Irányítástechnika 3. előadás
 Irányítátechnika 3. előadá Dr. Kovác Levente 203. 04. 6. 203.04.6. Tartalom Laplace tranzformáció, fontoabb jelek Laplace tranzformáltja Stabilitá alaptétele Bode diagram, Bode-féle tabilitá kritérium
Irányítátechnika 3. előadá Dr. Kovác Levente 203. 04. 6. 203.04.6. Tartalom Laplace tranzformáció, fontoabb jelek Laplace tranzformáltja Stabilitá alaptétele Bode diagram, Bode-féle tabilitá kritérium
Stabilitás Irányítástechnika PE MI_BSc 1
 Stabilitás 2008.03.4. Stabilitás egyszerűsített szemlélet példa zavarás utá a magára hagyott redszer visszatér a yugalmi állapotába kvázistacioárius állapotba kerül végtelebe tart alapjelváltás Stabilitás/2
Stabilitás 2008.03.4. Stabilitás egyszerűsített szemlélet példa zavarás utá a magára hagyott redszer visszatér a yugalmi állapotába kvázistacioárius állapotba kerül végtelebe tart alapjelváltás Stabilitás/2
RENDSZERTECHNIKA 8. GYAKORLAT
 RENDSZERTECHNIKA 8. GYAKORLAT ÜTEMTERV VÁLTOZÁS Gyakorlat Hét Dátum Témakör Házi feladat Egyéb 1 1. hét 02.09 Ismétlés, bevezetés Differenciálegyenletek mérnöki 2 2. hét 02.16 szemmel 1. Hf kiadás 3 3.
RENDSZERTECHNIKA 8. GYAKORLAT ÜTEMTERV VÁLTOZÁS Gyakorlat Hét Dátum Témakör Házi feladat Egyéb 1 1. hét 02.09 Ismétlés, bevezetés Differenciálegyenletek mérnöki 2 2. hét 02.16 szemmel 1. Hf kiadás 3 3.
Négypólusok tárgyalása Laplace transzformációval
 Négypólusok tárgyalása Laplace transzformációval Segédlet az Elektrotechnika II. c. tantárgyhoz Összeállította: Dr. Kurutz Károly egyetemi tanár Szászi István egyetemi tanársegéd . Laplace transzformáció
Négypólusok tárgyalása Laplace transzformációval Segédlet az Elektrotechnika II. c. tantárgyhoz Összeállította: Dr. Kurutz Károly egyetemi tanár Szászi István egyetemi tanársegéd . Laplace transzformáció
Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához
 Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához Gerzson Miklós 2015. december 8. 2 Tartalomjegyzék Bevezetés 5 1. Kötelező kérdések 7 1.1. Kötelező kérdések a Kalman-féle
Ideiglenes példatár az Intelligens rendszerek I. kurzus 1. zárthelyi dolgozatához Gerzson Miklós 2015. december 8. 2 Tartalomjegyzék Bevezetés 5 1. Kötelező kérdések 7 1.1. Kötelező kérdések a Kalman-féle
OMRON MŰSZAKI INFORMÁCIÓK OMRON
 A hőmérséklet A stabil hőmérséklethoz szükséges idő függ a szabályozott rendszertől. A válaszidő megrövidítése rendszerint, túllövést vagy lengő rendszert fog eredményezni. Ha csökkentjük a hőmérséklet
A hőmérséklet A stabil hőmérséklethoz szükséges idő függ a szabályozott rendszertől. A válaszidő megrövidítése rendszerint, túllövést vagy lengő rendszert fog eredményezni. Ha csökkentjük a hőmérséklet
1. Feladat. 1. ábra. Megoldás
 . Feladat Az. ábrán látható egyenáramú áramkörben, kezdetben mindkét kapcsoló nyitott állásba található. A0 pillanatban zárjuk a kapcsolót, majd megvárjuk, hogy a létrejövő tranziens folyamat során a kondenzátor
. Feladat Az. ábrán látható egyenáramú áramkörben, kezdetben mindkét kapcsoló nyitott állásba található. A0 pillanatban zárjuk a kapcsolót, majd megvárjuk, hogy a létrejövő tranziens folyamat során a kondenzátor
Ha ismert (A,b,c T ), akkor
, akkor") Az eddigiekben feltételeztük, hogy a rendszer állapotát mérni tudjuk. Az állapot ismerete szükséges az állapot-visszacsatolt szabályzó tervezéséhez. Ha nem ismerjük az x(t) állapotvektort, akkor egy olyan
Az eddigiekben feltételeztük, hogy a rendszer állapotát mérni tudjuk. Az állapot ismerete szükséges az állapot-visszacsatolt szabályzó tervezéséhez. Ha nem ismerjük az x(t) állapotvektort, akkor egy olyan
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
( ) abszolút érték függvényét!
 abszolút érték függvényét!") Modulzáró példák. Folytono lineári rendzerek leíráa az idő-, az operátor- é a frekvenciatartományban. Egy lineári rendzer frekvenciafüggvényének fázimenete: (")= # 90 # 5". Írja fel a rendzer átviteli
Modulzáró példák. Folytono lineári rendzerek leíráa az idő-, az operátor- é a frekvenciatartományban. Egy lineári rendzer frekvenciafüggvényének fázimenete: (")= # 90 # 5". Írja fel a rendzer átviteli
Mátrix-exponens, Laplace transzformáció
 2016. április 4. 2016. április 11. LINEÁRIS DIFFERENCIÁLEGYENLET RENDSZEREK ÉS A MÁTRIX-EXPONENS KAPCSOLATA Feladat - ismétlés Tegyük fel, hogy A(t) = (a ik (t)), i, k = 1,..., n és b(t) folytonos mátrix-függvények
2016. április 4. 2016. április 11. LINEÁRIS DIFFERENCIÁLEGYENLET RENDSZEREK ÉS A MÁTRIX-EXPONENS KAPCSOLATA Feladat - ismétlés Tegyük fel, hogy A(t) = (a ik (t)), i, k = 1,..., n és b(t) folytonos mátrix-függvények
DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN. 2003.11.06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1
 DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN 2003..06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet Egy bemenetű, egy kimenetű rendszer u(t) diff. egyenlet v(t) zárt alakban n-edrendű diff. egyenlet
DINAMIKAI VIZSGÁLAT ÁLLAPOTTÉRBEN 2003..06. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet Egy bemenetű, egy kimenetű rendszer u(t) diff. egyenlet v(t) zárt alakban n-edrendű diff. egyenlet
2. REZGÉSEK Harmonikus rezgések: 2.2. Csillapított rezgések
 . REZGÉSEK.1. Harmonikus rezgések: Harmonikus erő: F = D x D m ẍ= D x (ezt a mechanikai rendszert lineáris harmonikus oszcillátornak nevezik) (Oszcillátor körfrekvenciája) ẍ x= Másodrendű konstansegyütthatós
. REZGÉSEK.1. Harmonikus rezgések: Harmonikus erő: F = D x D m ẍ= D x (ezt a mechanikai rendszert lineáris harmonikus oszcillátornak nevezik) (Oszcillátor körfrekvenciája) ẍ x= Másodrendű konstansegyütthatós
Függvények december 6. Határozza meg a következő határértékeket! 1. Feladat: x 0 7x 15 x ) = lim. Megoldás: lim. 2. Feladat: lim.
 = lim. Megoldás: lim. 2. Feladat: lim.") Függvények 05. december 6. Határozza meg a következő határértékeket!. Feladat: ( + 7 5 ) ( + 7 5 ) ( + 0 ). Feladat: ( + 7 5 ) ( + 7 5 ) ( + 0) 3. Feladat: ( + 0 7 5 ) 4. Feladat: ( + 0 7 5 ) ( + 7 0 5
Függvények 05. december 6. Határozza meg a következő határértékeket!. Feladat: ( + 7 5 ) ( + 7 5 ) ( + 0 ). Feladat: ( + 7 5 ) ( + 7 5 ) ( + 0) 3. Feladat: ( + 0 7 5 ) 4. Feladat: ( + 0 7 5 ) ( + 7 0 5
Gyakorló feladatok az II. konzultáció anyagához
 Gyakorló feladatok az II. konzultáció anyagához 003/004 tanév, I. félév 1. Vizsgáljuk meg a következő sorozatokat korlátosság és monotonitás szempontjából! a n = 5n+1, b n = n + n! 3n 8, c n = 1 ( 1)n
Gyakorló feladatok az II. konzultáció anyagához 003/004 tanév, I. félév 1. Vizsgáljuk meg a következő sorozatokat korlátosság és monotonitás szempontjából! a n = 5n+1, b n = n + n! 3n 8, c n = 1 ( 1)n
Irányítástechnika GÁSPÁR PÉTER. Prof. BOKOR JÓZSEF útmutatásai alapján
 Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
Irányítástechnika GÁSPÁR PÉTER Prof. BOKOR JÓZSEF útmutatásai alapján Irányítástechnika a Alapfogalmak, modellezési elvek. Irányítástechnika Budapest, 2009 2 Az előadás szerkezete a 1. 2. módszerei 3.
K a hurokerısítés; K= xk / xb
 Tartalom: 2.oldal Hurokerısítés 3.oldal Szab. kör típusai (0,1) 4,5 oldalak Zárt kör átv. fgv. 6,7 oldalak Értéktartó és követı szab. 8. oldal Stabilitás 9.,10 oldalak Stabilitás vizsgálat 11,12. oldalak
Tartalom: 2.oldal Hurokerısítés 3.oldal Szab. kör típusai (0,1) 4,5 oldalak Zárt kör átv. fgv. 6,7 oldalak Értéktartó és követı szab. 8. oldal Stabilitás 9.,10 oldalak Stabilitás vizsgálat 11,12. oldalak
milyen mennyiségeket jelölnek a Bode diagram tengelyei? csoportosítsa a determinisztikus jeleket!
 A 2011-es ZH kérdései emlékezetből, majd közösen kidolgozva. Lehet benne rossz, de elég sokan szerkesztettük egyszerre, szóval feltehetően a nagyja helyes. milyen mennyiségeket jelölnek a Bode diagram
A 2011-es ZH kérdései emlékezetből, majd közösen kidolgozva. Lehet benne rossz, de elég sokan szerkesztettük egyszerre, szóval feltehetően a nagyja helyes. milyen mennyiségeket jelölnek a Bode diagram
Elhangzott tananyag óránkénti bontásban
 TTK, Matematikus alapszak Differenciálegyenletek (Előadás BMETE93AM03; Gyakorlat BME TE93AM04) Elhangzott tananyag óránkénti bontásban 2016. február 15. 1. előadás. Közönséges differenciálegyenlet fogalma.
TTK, Matematikus alapszak Differenciálegyenletek (Előadás BMETE93AM03; Gyakorlat BME TE93AM04) Elhangzott tananyag óránkénti bontásban 2016. február 15. 1. előadás. Közönséges differenciálegyenlet fogalma.
Villamosságtan szigorlati tételek
 Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
Villamosságtan szigorlati tételek 1.1. Egyenáramú hálózatok alaptörvényei 1.2. Lineáris egyenáramú hálózatok elemi számítása 1.3. Nemlineáris egyenáramú hálózatok elemi számítása 1.4. Egyenáramú hálózatok
UAV AUTOMATIKUS REPÜLÉSSZABÁLYOZÓ RENDSZER TÍPUS ÉS LÉGIALKALMASSÁGI TANÚSÍTÁSÁNAK MEGFELELÉSI KRITÉRIUMAI HOSSZIRÁNYÚ MOZGÁS
 IX. Évfolyam 2. szám - 2014. június SZABOLCSI Róbert szabolcsi.robert@bgk.uni-obuda.hu UAV AUTOMATIKUS REPÜLÉSSZABÁLYOZÓ RENDSZER TÍPUS ÉS LÉGIALKALMASSÁGI TANÚSÍTÁSÁNAK MEGFELELÉSI KRITÉRIUMAI HOSSZIRÁNYÚ
IX. Évfolyam 2. szám - 2014. június SZABOLCSI Róbert szabolcsi.robert@bgk.uni-obuda.hu UAV AUTOMATIKUS REPÜLÉSSZABÁLYOZÓ RENDSZER TÍPUS ÉS LÉGIALKALMASSÁGI TANÚSÍTÁSÁNAK MEGFELELÉSI KRITÉRIUMAI HOSSZIRÁNYÚ
A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA. 2006. április 28. 2006.04.24. 1
 A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA 2006. április 28. 2006.04.24. 1 MIÉRT VAN SZÜKSÉG HIDRAULIKAI BESZABÁLYOZÁSRA? HIDRAULIKAI RENDSZEREK HELYES MŰKÖDÉSÉNEK ALAPFELTÉTELEI 1. A TERVEZETT
A HIDRAULIKAI BESZABÁLYOZÁS ÉS SZABÁLYOZÁS KAPCSOLATA 2006. április 28. 2006.04.24. 1 MIÉRT VAN SZÜKSÉG HIDRAULIKAI BESZABÁLYOZÁSRA? HIDRAULIKAI RENDSZEREK HELYES MŰKÖDÉSÉNEK ALAPFELTÉTELEI 1. A TERVEZETT
Mechatronikai berendezések tervezése Dr. Huba, Antal Dr. Aradi, Petra Czmerk, András Dr. Lakatos, Béla Dr. Chován, Tibor Dr.
 Mechatronikai berendezések tervezése Dr. Huba, Antal Dr. Aradi, Petra Czmerk, András Dr. Lakatos, Béla Dr. Chován, Tibor Dr. Varga, Tamás Mechatronikai berendezések tervezése írta Dr. Huba, Antal, Dr.
Mechatronikai berendezések tervezése Dr. Huba, Antal Dr. Aradi, Petra Czmerk, András Dr. Lakatos, Béla Dr. Chován, Tibor Dr. Varga, Tamás Mechatronikai berendezések tervezése írta Dr. Huba, Antal, Dr.
1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1
![1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1](/thumbs/88/116339870.jpg "1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1") numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
HÁZI FELADATOK. 1. félév. 1. konferencia A lineáris algebra alapjai
 HÁZI FELADATOK. félév. konferencia A lineáris algebra alapjai Értékelés:. egység: önálló feladatmegoldás.8. Döntse el, párhuzamosak-e a következő vektorpárok: a) a( ; ; 7) b(; 5; ) b) c(; 9; 5) d(8; 6;
HÁZI FELADATOK. félév. konferencia A lineáris algebra alapjai Értékelés:. egység: önálló feladatmegoldás.8. Döntse el, párhuzamosak-e a következő vektorpárok: a) a( ; ; 7) b(; 5; ) b) c(; 9; 5) d(8; 6;
Tartalom. Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás
 Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
Tartalom Állapottér reprezentációk tulajdonságai stabilitás irányíthatóság megfigyelhetőség minimalitás 2018 1 Állapottér reprezentációk tulajdonságai Általánosan egy lineáris, SISO dinamikus rendszer
7. gyakorlat megoldásai
 7. gyakorlat megoldásai Komple számok, sajátértékek, sajátvektorok F1. Legyen z 1 = + i és z = 1 i. Számoljuk ki az alábbiakat: z 1 z 1 + z, z 1 z, z 1 z,, z 1, z 1. z M1. A szorzásnál használjuk, hogy
7. gyakorlat megoldásai Komple számok, sajátértékek, sajátvektorok F1. Legyen z 1 = + i és z = 1 i. Számoljuk ki az alábbiakat: z 1 z 1 + z, z 1 z, z 1 z,, z 1, z 1. z M1. A szorzásnál használjuk, hogy
Hálózatok számítása egyenáramú és szinuszos gerjesztések esetén. Egyenáramú hálózatok vizsgálata Szinuszos áramú hálózatok vizsgálata
 Hálózatok számítása egyenáramú és szinuszos gerjesztések esetén Egyenáramú hálózatok vizsgálata Szinuszos áramú hálózatok vizsgálata Egyenáramú hálózatok vizsgálata ellenállások, generátorok, belső ellenállások
Hálózatok számítása egyenáramú és szinuszos gerjesztések esetén Egyenáramú hálózatok vizsgálata Szinuszos áramú hálózatok vizsgálata Egyenáramú hálózatok vizsgálata ellenállások, generátorok, belső ellenállások
2018, Diszkrét matematika
 Diszkrét matematika 4. előadás mgyongyi@ms.sapientia.ro Sapientia Egyetem, Matematika-Informatika Tanszék Marosvásárhely, Románia 2018, őszi félév Miről volt szó az elmúlt előadáson? számtartományok: racionális
Diszkrét matematika 4. előadás mgyongyi@ms.sapientia.ro Sapientia Egyetem, Matematika-Informatika Tanszék Marosvásárhely, Románia 2018, őszi félév Miről volt szó az elmúlt előadáson? számtartományok: racionális
AZ RD-33-AS HAJTÓMŰ CENTRIFUGÁLIS FORDULATSZÁM SZABÁLYZÓJÁNAK MATEMATIKAI MODELLEZÉSE
 AZ RD-33-AS HAJTÓMŰ CENTRIFUGÁLIS FORDULATSZÁM SZABÁLYZÓJÁNAK MATEMATIKAI MODELLEZÉSE Ailor Piroska egyetemi hallgató Budapesti Műszaki Egyetem Közlekedésmérnöki Kar Repülőgépek és Hajók Tanszék A szo
AZ RD-33-AS HAJTÓMŰ CENTRIFUGÁLIS FORDULATSZÁM SZABÁLYZÓJÁNAK MATEMATIKAI MODELLEZÉSE Ailor Piroska egyetemi hallgató Budapesti Műszaki Egyetem Közlekedésmérnöki Kar Repülőgépek és Hajók Tanszék A szo
Hatványsorok, Fourier sorok
 a Matematika mérnököknek II. című tárgyhoz Hatványsorok, Fourier sorok Hatványsorok, Taylor sorok Közismert, hogy ha 1 < x < 1 akkor 1 + x + x 2 + x 3 + = n=0 x n = 1 1 x. Az egyenlet baloldalán álló kifejezés
a Matematika mérnököknek II. című tárgyhoz Hatványsorok, Fourier sorok Hatványsorok, Taylor sorok Közismert, hogy ha 1 < x < 1 akkor 1 + x + x 2 + x 3 + = n=0 x n = 1 1 x. Az egyenlet baloldalán álló kifejezés
Digitális jelfeldolgozás
 Digitális jelfeldolgozás Mintavételezés és jel-rekonstrukció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2010.
Digitális jelfeldolgozás Mintavételezés és jel-rekonstrukció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2010.
Baran Ágnes, Burai Pál, Noszály Csaba. Gyakorlat Differenciálegyenletek numerikus megoldása
 Matematika Mérnököknek 2. Baran Ágnes, Burai Pál, Noszály Csaba Gyakorlat Differenciálegyenletek numerikus megoldása Baran Ágnes, Burai Pál, Noszály Csaba Matematika Mérnököknek 2. Gyakorlat 1 / 18 Fokozatos
Matematika Mérnököknek 2. Baran Ágnes, Burai Pál, Noszály Csaba Gyakorlat Differenciálegyenletek numerikus megoldása Baran Ágnes, Burai Pál, Noszály Csaba Matematika Mérnököknek 2. Gyakorlat 1 / 18 Fokozatos
Ipari kemencék PID irányítása
 Ipari kemencék PID irányítása 1. A gyakorlat célja: Az ellenállással melegített ipari kemencék modelljének meghatározása. A Opelt PID tervezési módszer alkalmazása ipari kemencék irányítására. Az ipari
Ipari kemencék PID irányítása 1. A gyakorlat célja: Az ellenállással melegített ipari kemencék modelljének meghatározása. A Opelt PID tervezési módszer alkalmazása ipari kemencék irányítására. Az ipari
Jelek és rendszerek - 4.előadás
 Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
Jelek és rendszerek - 4.előadás Rendszervizsgálat a komplex frekvenciatartományban Mérnök informatika BSc (lev.) Pécsi Tudományegyetem, Pollack Mihály Műszaki Kar Műszaki Informatika és Villamos Intézet
ÁGAZATI SZAKMAI ÉRETTSÉGI VIZSGA VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK
 VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
VILLAMOSIPAR ÉS ELEKTRONIKA ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK Szóbeli vizsgarész értékelési táblázata A szóbeli felelet értékelése az alábbi szempontok és alapján történik:
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8.
 8.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 8. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
AZ AUTOMATIKUS SEBESSÉGSTABILIZÁLÓ RENDSZER NUMERIKUS VIZSGÁLATA NUMERICAL ANALYSIS OF THE AUTOMATIC SPEED CONTROL SYSTEM
 AZ AUTOATIUS SEBESSÉGSTABILIZÁLÓ RENDER NUERIUS VIZSGÁLATA DR. HABIL. ABOLCSI RÓBERT okl. mk. alezredes AZ AUTOATIUS SEBESSÉGSTABILIZÁLÓ RENDER NUERIUS VIZSGÁLATA NUERICAL ANALYSIS OF THE AUTOATIC SPEED
AZ AUTOATIUS SEBESSÉGSTABILIZÁLÓ RENDER NUERIUS VIZSGÁLATA DR. HABIL. ABOLCSI RÓBERT okl. mk. alezredes AZ AUTOATIUS SEBESSÉGSTABILIZÁLÓ RENDER NUERIUS VIZSGÁLATA NUERICAL ANALYSIS OF THE AUTOATIC SPEED
Történeti Áttekintés
 Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
120 Lantos-Kiss-Harmati: Szabályozástechnika gyakorlatok. 2. Gyakorlat. 2. Tantermi gyakorlat Szabályozási kör analízise
 Lantos-Kiss-Harmati: Szabályozástechnika gyakorlatok. Gyakorlat. Tantermi gyakorlat Szabályozási kör analízise A tantermi gyakorlat célja, hogy a hallgatók gyakorlati ismereteket szerezzenek dinamikus
Lantos-Kiss-Harmati: Szabályozástechnika gyakorlatok. Gyakorlat. Tantermi gyakorlat Szabályozási kör analízise A tantermi gyakorlat célja, hogy a hallgatók gyakorlati ismereteket szerezzenek dinamikus
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Irányítástechnika 12. évfolyam
 Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Hatvány gyök logaritmus
 Szent István Egyetem Gépészmérnöki Kar Matematika Tanszék 1 Hatvány gyök logaritmus Hatványozás azonosságai 1. Döntse el az alábbi állításról, hogy igaz-e vagy hamis! Ha két szám négyzete egyenl, akkor
Szent István Egyetem Gépészmérnöki Kar Matematika Tanszék 1 Hatvány gyök logaritmus Hatványozás azonosságai 1. Döntse el az alábbi állításról, hogy igaz-e vagy hamis! Ha két szám négyzete egyenl, akkor
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Közönséges differenciál egyenletek megoldása numerikus módszerekkel: egylépéses numerikus eljárások
 Közönséges differenciál egyenletek megoldása numerikus módszerekkel: egylépéses numerikus eljárások Bevezetés Ebben a cikkben megmutatjuk, hogyan használhatóak a Mathematica egylépéses numerikus eljárásai,
Közönséges differenciál egyenletek megoldása numerikus módszerekkel: egylépéses numerikus eljárások Bevezetés Ebben a cikkben megmutatjuk, hogyan használhatóak a Mathematica egylépéses numerikus eljárásai,