Irányítástechnika 4. előadás
|
|
|
- Ottó Gál
- 9 évvel ezelőtt
- Látták:
Átírás
1 Iránítátechnika 4. előadá Dr. Kovác Levente
2 artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi követelmének A lineári rendzer mozgáa Állandóult állapot

3 artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi követelmének A lineári rendzer mozgáa Állandóult állapot

4 ipiku tagok amplitúdó- é fázimenete Aráno P tag t = k ut H = k k > t k t H db = lg k

5 ipiku tagok amplitúdó- é fázimenete Integráló I tag t k u d t u t t t t i H db = lg k lg arg{h} = - π/ H i i i p =

6 ipiku tagok amplitúdó- é fázimenete Differenciáló D tag t = d út H = d d > m > n t t d H db = lg k+ lg arg{h}= + π/ z =

7 ipiku tagok amplitúdó- é fázimenete Egtároló aráno tag P * t+t = k ut k H k>, > t / t k e t H db = lgk -lg / arg{h}= arctgω/ω p = - /

8 ipiku tagok amplitúdó- é fázimenete PD k u d u H = k + d m >n, d > K t t d lgk lg / i p : --- ; z = -/ d

9 ipiku tagok amplitúdó- é fázimenete PD H k u k d k>, >, d >, > d : d u t k d e t / t lg k lg lg / / d < d : p = -/, z =-/ d

10 ipiku tagok amplitúdó- é fázimenete PI K u i t u d lg K lg / t K t i i lg / i H K i i K > ; i > p = ; z = -/ i

11 ipiku tagok amplitúdó- é fázimenete PID u ud u K d i R d i R K H K R > ; i > ; d > p = ; z = - / r ; z = -/ m > n ha i > 4 d : r r r H k k r >, r >, r > ] [ t t t t K d i R / / lg lg lg lg k r r r r r r r arctg
![-/ m > n ha i > 4 d : r r r H k k r >, r >, r > ] [](/docs-images/46/19504867/images/page_11.jpg "t t t t K d i R / / lg lg lg lg k r r r r r r r")
12 ipiku tagok amplitúdó- é fázimenete Kéttároló aráno tag P k u k H k >, >, > < <, j p e e t t K / / t K K in tg, lg lg / k arctg

13 ipiku tagok amplitúdó- é fázimenete Kéttároló aráno tag P Az w < / tartománon aráno P taggal közelíthető Az w > / tartománon wjw -/w kétzereen integráló taggal közelíthető Az w = / körüli frekvenciákon a frekvencia átviteli tulajdonágok a x cillapítái ténezőtől függenek =, =,3 =,7 = = 4dB/dek Az w vágái frekvencián az amplitúdó /ξ a fázizög -9 /

14 ipiku tagok amplitúdó- é fázimenete Kéttároló aráno tag P ξ > eetben való póluok aperiodikuan cillapított tag ξ < eetben komplex-konjugált póluok periodikuan cillapított vag lengő tag w p = w - ξ lengéi frekvenciával =,3 =,7 = =

15 artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi követelmének A lineári rendzer mozgáa Állandóult állapot

16 Bode diagram példa
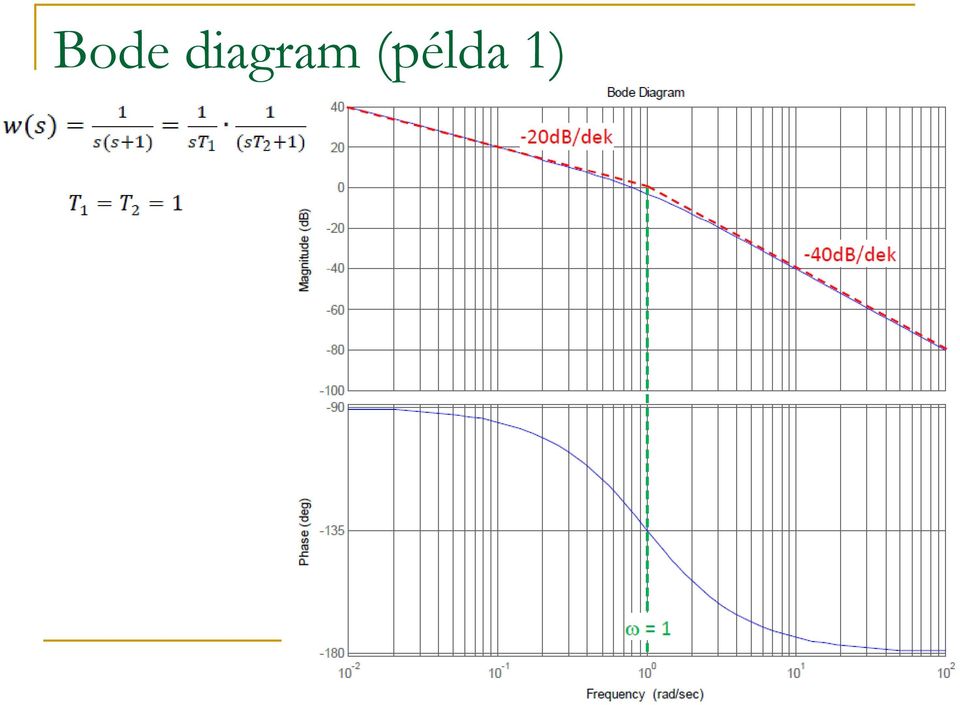
17 Bode diagram példa db/dek -db/dek -4dB/dek A fázi diagramra általában nem kielégítő a töréponto közelíté főleg nagobb fokzám eetén

18 Bode diagram példa 3 Amplitúdó menet töréponto közelítée időállandó alak: = jω = heletteítéel: a három töréponti frekvencia:

19 Bode diagram példa 3 Amplitúdó menet töréponto közelítée

20 artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi követelmének A lineári rendzer mozgáa Állandóult állapot

21 Frekvencia átviteli függvén Az u bemenő é kimenő jel közötti kapcolatot leíró w átviteli függvénből = jw heletteítéel Stabili lineári tag eetén egégni amplitúdójú zéru fáziú zinuzo bemenő jelre a t ut
22 artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi követelmének A lineári rendzer mozgáa Állandóult állapot
23 ... a a a a n n n n Hurwitz kritérium. H determinán a a a a b b b b W W r W n n n n m m m m Karakteriztiku polinom a a... a a a... a a a H 3 n n 4 n n n 5 n 3 n n Hurwitz determinán H H H 3 Zárt rendzer!
24 Hurwitz kritérium. Megfogalmazá.. a i > zigorúan!!, i = n rendzer fokzáma. H i > zigorúan!!, i = n rendzer fokzáma Ha + teljeül, akkor a rendzer tabili! Megj.: Stabilitái határ kritiku körerőíté zámítáa.
25 Példa r e u u 3 5 z 4 W 4 Z = -3 P = i i -3.
26 artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi követelmének A lineári rendzer mozgáa Állandóult állapot
27 A zabálozái kör ugráválaza A zárt zabálozái kör ugráválazáról a vt átmenti függvénről leolvahatók a zabálozái kör időtartománbeli jellemzői. Általáno elvárá, hog a zabálozott jellemző t időfüggvéne minél pontoabban kövee az alapjel rt időfüggvénét.
28 A zabálozái kör ugráválaza végérték dinamiku hibaáv felfutái idő zabálozái idő az ugráválaz elő maximumához tartozó idő
29 Minőégi követelmének
30 artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi követelmének A lineári rendzer mozgáa Állandóult állapot
31 A lineári rendzer mozgáa Nugalmi állapot Egenúli állapotban valamenni állapotváltozó mozgáa megzűnik, xt = állandó Saját mozgá A nugalmi helzetéből kitérített majd pl. a t = időpontban magára hagott rendzer mozgáa Gerjeztett mozgá A nugalmi helzetben lévő rendzerre adott bemenő jel vált ki Stabili rendzer A nugalmi helzetéből kitérített majd magára hagott rendzer vizatér nugalmi helzetébe vag annak közeli körnezetébe Labili rendzer A nugalmi helzetéből kitérített majd magára hagott rendzer nem tér viza nugalmi helzetébe vag annak közeli körnezetébe
32 artalom ipiku tagok amplitúdó- é fázimenete Bode diagram példák Frekvencia átviteli függvén Hurwitz kritérium A zabálozái kör ugráválaza, minőégi követelmének A lineári rendzer mozgáa Állandóult állapot
33 Állandóult állapot dx Ax t Bu t dt t Cx t Du t lim W u t Ax t Cx t Bu t Du t A Laplace végérték tétel az állandóult állapot ha t jelei zámíthatók, amikor ípu Bemenet Kimenet Átviteli fv. P u b u a I u =!!? D u =!! W W W k k
34 Példa ha, akkor / r cak akkor lehet vége r =, ha e = z r e u u Kezdeti feltétel: r = e u u u u z z r e Laplace tartomán: e r e
35 Példa r e u u 5 3 Időtartomán ha =: e z u u r 4 z u 3 5 u e z 4 felhaználva, hog e = felhaználva, hog z = felhaználva, hog =.5 felhaználva, hog u =.75 Kezdeti feltétel: r = z = =.5 u =.75 u =.5
36 Példa r e u u 3 5 z 4 Kezdeti feltétel: r = e = ; z = ; =.5 ; u =.75 ; u =.5 ;
37
38 Közönöm a figelmet! [email protected]
Irányítástechnika. II. rész. Dr. Turóczi Antal [email protected]
 Irányítástechnika II. rész Dr. Turóczi Antal [email protected] Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Irányítástechnika II. rész Dr. Turóczi Antal [email protected] Lineáris tagok jelátvivő tulajdonságai Lineáris dinamikus rendszerek, folyamatok Lineáris tagok modellje Differenciálegyenlettel
Elektronika 2. TFBE1302
 Elektronika. TFBE3 Szűrők TFBE3 Elektronika. nalóg elektronika ismétlődő feladatai, szűrők Szűrő: Olyan elektronikus rendezés, amely a menetére kapcsolt jelből csak a szűrőre jellemző frekenciasába eső
Elektronika. TFBE3 Szűrők TFBE3 Elektronika. nalóg elektronika ismétlődő feladatai, szűrők Szűrő: Olyan elektronikus rendezés, amely a menetére kapcsolt jelből csak a szűrőre jellemző frekenciasába eső
ELLENŐRZŐ KÉRDÉSEK LENGÉSTANBÓL: A rugóállandó a rugómerevség reciproka. (Egyik végén befogott tartóra: , a rugómerevség mértékegysége:
 ELLENŐRZŐ ÉRDÉSE LENGÉSNBÓL: Átaáno kérdéek: Mik a engőrendzer eemei?: engőrendzer eemei: a tömeg(ek), a rugó(k), ietve a ciapítá(ok). Mi a rugóáandó?: rugóáandó a rugó egyégnyi terheé aatti aakvátozáát
ELLENŐRZŐ ÉRDÉSE LENGÉSNBÓL: Átaáno kérdéek: Mik a engőrendzer eemei?: engőrendzer eemei: a tömeg(ek), a rugó(k), ietve a ciapítá(ok). Mi a rugóáandó?: rugóáandó a rugó egyégnyi terheé aatti aakvátozáát
Szabályozástechnika II.
 TÁMOP-4.1.1.F-14/1/KONV-215-9 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika II. Pécs 215 A tananyag
TÁMOP-4.1.1.F-14/1/KONV-215-9 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Jancskárné Anweiler Ildikó Szabályozástechnika II. Pécs 215 A tananyag
Irányítástechnika 3. előadás
 Irányítátechnika 3. előadá Dr. Kovác Levente 203. 04. 6. 203.04.6. Tartalom Laplace tranzformáció, fontoabb jelek Laplace tranzformáltja Stabilitá alaptétele Bode diagram, Bode-féle tabilitá kritérium
Irányítátechnika 3. előadá Dr. Kovác Levente 203. 04. 6. 203.04.6. Tartalom Laplace tranzformáció, fontoabb jelek Laplace tranzformáltja Stabilitá alaptétele Bode diagram, Bode-féle tabilitá kritérium
Frekvenciatartomány Irányítástechnika PE MI BSc 1
 Frekvenciatartomány ny 008.03.4. Irányítátechnika PE MI BSc Frekvenciatartomány bevezetéének indoka: általában időtartománybeli válaz kell alkalmazott teztelek i ezt indokolák információ rendzerek eetében
Frekvenciatartomány ny 008.03.4. Irányítátechnika PE MI BSc Frekvenciatartomány bevezetéének indoka: általában időtartománybeli válaz kell alkalmazott teztelek i ezt indokolák információ rendzerek eetében

Csak felvételi vizsga: csak záróvizsga: közös vizsga: Villamosmérnöki szak BME Villamosmérnöki és Informatikai Kar. 2011. május 31.
 Név, felvételi azonoító, Neptun-kód: VI pont(90) : Cak felvételi vizga: cak záróvizga: közö vizga: Közö alapképzée záróvizga meterképzé felvételi vizga Villamomérnöki zak BME Villamomérnöki é Informatikai
Név, felvételi azonoító, Neptun-kód: VI pont(90) : Cak felvételi vizga: cak záróvizga: közö vizga: Közö alapképzée záróvizga meterképzé felvételi vizga Villamomérnöki zak BME Villamomérnöki é Informatikai
Programozható vezérlő rendszerek. Szabályozástechnika
 - a legtöbb ipari rendszer tartalmaz valamiféle szabályozási feladatot (pozicionálás) - cél: a folyamat egyes paramétereinek megadott határokon belül tartása - a PLC ezeket képes lekezelni (analóg I/O)
- a legtöbb ipari rendszer tartalmaz valamiféle szabályozási feladatot (pozicionálás) - cél: a folyamat egyes paramétereinek megadott határokon belül tartása - a PLC ezeket képes lekezelni (analóg I/O)
Irányítástechnika 2. előadás
 Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Irányítástechnika 2. előadás Dr. Kovács Levente 2013. 03. 19. 2013.03.19. Tartalom Tipikus vizsgálójelek és azok információtartalma Laplace transzformáció, állapotegyenlet, átviteli függvény Alaptagok
Líneáris függvények. Definíció: Az f(x) = mx + b alakú függvényeket, ahol m 0, m, b R elsfokú függvényeknek nevezzük.
 = mx + b alakú függvényeket, ahol m 0, m, b R elsfokú függvényeknek nevezzük.") Líneáris függvének Definíció: Az f() = m + b alakú függvéneket, ahol m, m, b R elsfokú függvéneknek nevezzük. Az f() = m + b képletben - a b megmutatja, hog a függvén hol metszi az tengelt, majd - az m
Líneáris függvének Definíció: Az f() = m + b alakú függvéneket, ahol m, m, b R elsfokú függvéneknek nevezzük. Az f() = m + b képletben - a b megmutatja, hog a függvén hol metszi az tengelt, majd - az m
2007/2008. tanév. Szakács Jenő Megyei Fizika Verseny I. forduló. 2007. november 9. MEGOLDÁSOK
 007/008. tané Szakác Jenő Megyei Fizika Vereny I. forduló 007. noeber 9. MEGOLDÁSOK 007-008. tané - Szakác Jenő Megyei Fizika Vereny I. forduló Megoldáok. d = 50 = 4,4 k/h = 4 / a) t =? b) r =? c) =?,
007/008. tané Szakác Jenő Megyei Fizika Vereny I. forduló 007. noeber 9. MEGOLDÁSOK 007-008. tané - Szakác Jenő Megyei Fizika Vereny I. forduló Megoldáok. d = 50 = 4,4 k/h = 4 / a) t =? b) r =? c) =?,
LTI Rendszerek Dinamikus Analízise és Szabályozásának Alapjai
 Diszkrét és hibrid diagnosztikai és irányítórendszerek LTI Rendszerek Dinamikus Analízise és Szabályozásának Alapjai Hangos Katalin Közlekedésautomatika Tanszék Rendszer- és Irányításelméleti Kutató Laboratórium
Diszkrét és hibrid diagnosztikai és irányítórendszerek LTI Rendszerek Dinamikus Analízise és Szabályozásának Alapjai Hangos Katalin Közlekedésautomatika Tanszék Rendszer- és Irányításelméleti Kutató Laboratórium
ö ú ö ő ő ü ö ö ű ö ő ö ű ö ő ő ö ü ö ő ö ő ő ü ö ű ú ö ő ü ö ú ú ú ő ő Ő ö ű
 ö ő ü ö ö ő ö ö ö ö ő ő ő ö ő ő ő ö ő ö ő ő ö ö ő ő ö ö ő ö ö ő ö ö ö ő ő ü ö ő ü ű ö ú ő ú ú ú ő ü ő ü ö ö ú ö ö ö ő ü ö ö ö ő ö ő ö ú ö ő ő ü ö ö ű ö ő ö ű ö ő ő ö ü ö ő ö ő ő ü ö ű ú ö ő ü ö ú ú ú ő
ö ő ü ö ö ő ö ö ö ö ő ő ő ö ő ő ő ö ő ö ő ő ö ö ő ő ö ö ő ö ö ő ö ö ö ő ő ü ö ő ü ű ö ú ő ú ú ú ő ü ő ü ö ö ú ö ö ö ő ü ö ö ö ő ö ő ö ú ö ő ő ü ö ö ű ö ő ö ű ö ő ő ö ü ö ő ö ő ő ü ö ű ú ö ő ü ö ú ú ú ő
Tartóprofilok Raktári program
 Tartóproflok Raktár program ThenKrupp Ferroglou ThenKrupp Nolcadk kadá 6. áprl Ötvözetlen é alacon ötvözéú lemeztermékek Betonacélok Szerzámacélok Melegen hengerelt rúdacélok Könnú - é zínefémek Rozdamente
Tartóproflok Raktár program ThenKrupp Ferroglou ThenKrupp Nolcadk kadá 6. áprl Ötvözetlen é alacon ötvözéú lemeztermékek Betonacélok Szerzámacélok Melegen hengerelt rúdacélok Könnú - é zínefémek Rozdamente
Szabályozás Irányítástechnika PE MIK MI BSc 1
 Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Szabályozás 2008.03.29. Irányítástechnika PE MIK MI BSc 1 Nyílt hatásláncú rendszerek Az irányító rendszer nem ellenőrzi a beavatkozás eredményét vezérlő rendszerek ahol w(s) bemenő változó / előírt érték
Soros felépítésű folytonos PID szabályozó
 Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Soros felépítésű folytonos PID szabályozó Főbb funkciók: A program egy PID szabályozót és egy ez által szabályozott folyamatot szimulál, a kimeneti és a beavatkozó jel grafikonon való ábrázolásával. A
Tartalom. Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák
 Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Tartalom Soros kompenzátor tervezése 1. Tervezési célok 2. Tervezés felnyitott hurokban 3. Elemzés zárt hurokban 4. Demonstrációs példák 215 1 Tervezési célok Szabályozó tervezés célja Stabilitás biztosítása
Dinamika példatár. Szíki Gusztáv Áron
 Dinaika példatár Szíki Guztáv Áron TTLOMJEGYZÉK 4 DINMIK 4 4.1 NYGI PONT KINEMTIKÁJ 4 4.1.1 Mozgá adott pályán 4 4.1.1.1 Egyene vonalú pálya 4 4.1.1. Körpálya 1 4.1.1.3 Tetzőlege íkgörbe 19 4.1. Szabad
Dinaika példatár Szíki Guztáv Áron TTLOMJEGYZÉK 4 DINMIK 4 4.1 NYGI PONT KINEMTIKÁJ 4 4.1.1 Mozgá adott pályán 4 4.1.1.1 Egyene vonalú pálya 4 4.1.1. Körpálya 1 4.1.1.3 Tetzőlege íkgörbe 19 4.1. Szabad

2-17. ábra 2-18. ábra. Analízis 1. r x = = R = (3)
") A -17. ábra olyan centrifugáli tengelykapcolót mutat, melyben a centrifugáli erő hatáára kifelé mozgó golyók ékpálya-hatá egítégével zorítják öze a urlódótárcát. -17. ábra -18. ábra Analízi 1 A -17. ábrán
A -17. ábra olyan centrifugáli tengelykapcolót mutat, melyben a centrifugáli erő hatáára kifelé mozgó golyók ékpálya-hatá egítégével zorítják öze a urlódótárcát. -17. ábra -18. ábra Analízi 1 A -17. ábrán


1. forduló (2010. február 16. 14 17
 9. MIKOLA SÁNDOR ORSZÁGOS TEHETSÉGKUTATÓ FIZIKAVERSENY 9. frduló (. február 6. 4 7 a. A KITŰZÖTT FELADATOK: Figyele! A verenyen inden egédezköz (könyv, füzet, táblázatk, zálógép) haználható, é inden feladat
9. MIKOLA SÁNDOR ORSZÁGOS TEHETSÉGKUTATÓ FIZIKAVERSENY 9. frduló (. február 6. 4 7 a. A KITŰZÖTT FELADATOK: Figyele! A verenyen inden egédezköz (könyv, füzet, táblázatk, zálógép) haználható, é inden feladat
Tartalom. 1. Számítógéppel irányított rendszerek 2. Az egységugrásra ekvivalens diszkrét állapottér
 Tartalom 1. Számítógéppel irányított rendszerek 2. Az egységugrásra ekvivalens diszkrét állapottér 2015 1 Számítógéppel irányított rendszerek Számítógéppel irányított rendszer blokkvázlata Tartószerv D/A
Tartalom 1. Számítógéppel irányított rendszerek 2. Az egységugrásra ekvivalens diszkrét állapottér 2015 1 Számítógéppel irányított rendszerek Számítógéppel irányított rendszer blokkvázlata Tartószerv D/A
Hungaro-Trading Kft. 2700 Cegléd, Szolnoki út 69. Webáruházaink: www.kazanwebaruhaz.hu www.klimawebaruhaz.hu www.konyhawebaruhaz.
 Hugaro-Tradig Kft. 2700 Cegléd, Szoloki út 69. Webáruházaik: www.kazawebaruhaz.hu www.kliawebaruhaz.hu www.koyhawebaruhaz.hu 1 Megredelı: Tervezı: Dá: 2013.01.01. Megjegyzés: Mita Jáos 1111 Budapest Fı
Hugaro-Tradig Kft. 2700 Cegléd, Szoloki út 69. Webáruházaik: www.kazawebaruhaz.hu www.kliawebaruhaz.hu www.koyhawebaruhaz.hu 1 Megredelı: Tervezı: Dá: 2013.01.01. Megjegyzés: Mita Jáos 1111 Budapest Fı
Ipari folyamatirányítás
 Mechatronika továbbképzé Ipari folyamatirányítá 3. Előadá A zabályozáok minőégi jellemzői. Alapjelköveté é zavarelhárítá. Stabilitá. Általáno követelmények Értéktartó zabályozá biztoíta a zabályozott jellemző
Mechatronika továbbképzé Ipari folyamatirányítá 3. Előadá A zabályozáok minőégi jellemzői. Alapjelköveté é zavarelhárítá. Stabilitá. Általáno követelmények Értéktartó zabályozá biztoíta a zabályozott jellemző
DT13xx Gyújtószikramentes NAMUR / kontaktus leválasztók
 DOC N : DT1361-1393-62 DT13xx Gyújtószikramentes NAMUR / kontaktus leválasztók Felhasználói leírás DT1361, DT1362, DT1363, DT1364, DT1371, DT1372, DT1373, DT1381, DT1382, DT1384, DT1393 típusokhoz Gyártó:
DOC N : DT1361-1393-62 DT13xx Gyújtószikramentes NAMUR / kontaktus leválasztók Felhasználói leírás DT1361, DT1362, DT1363, DT1364, DT1371, DT1372, DT1373, DT1381, DT1382, DT1384, DT1393 típusokhoz Gyártó:
Gyártórendszerek Dinamikája. Irányítástechnikai alapfogalmak
 GyRDin-11 p. 1/19 Gyártórendszerek Dinamikája Irányítástechnikai alapfogalmak Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: [email protected] GyRDin-11 p. 2/19 Tartalom
GyRDin-11 p. 1/19 Gyártórendszerek Dinamikája Irányítástechnikai alapfogalmak Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: [email protected] GyRDin-11 p. 2/19 Tartalom
 E B D C C DD E E g e 112 D 0 e B A B B A e D B25 B B K H K Fejhallgató Antenna A B P C D E 123 456 789 *0# Kijelzés g B A P D C E 0 9* # # g B B 52 Y t ] [ N O S T \ T H H G ? > < p B E E D 0 e B D
E B D C C DD E E g e 112 D 0 e B A B B A e D B25 B B K H K Fejhallgató Antenna A B P C D E 123 456 789 *0# Kijelzés g B A P D C E 0 9* # # g B B 52 Y t ] [ N O S T \ T H H G ? > < p B E E D 0 e B D
 ö ö ö ö ő ö ö ő ö ő ő ő ö ö ő ő ö ö ő ő ű ű ő ő ö ű ő ö ö ő ö ő ö ú ő ö ű ű ő ő ö ű ő ö ö ű ű ő ö ű ő ö ö ű ű ű ű ű ű ű ö ű ő É ö ú ö ö ö ö Ő ö ö ö ö ő ö ö ő ö ö ő ö ö ő ű ö ö ö ö ö ö ő Ö ő ö ö ő ö ő ö
ö ö ö ö ő ö ö ő ö ő ő ő ö ö ő ő ö ö ő ő ű ű ő ő ö ű ő ö ö ő ö ő ö ú ő ö ű ű ő ő ö ű ő ö ö ű ű ő ö ű ő ö ö ű ű ű ű ű ű ű ö ű ő É ö ú ö ö ö ö Ő ö ö ö ö ő ö ö ő ö ö ő ö ö ő ű ö ö ö ö ö ö ő Ö ő ö ö ő ö ő ö

Membránsebesség-visszacsatolásos mélysugárzó direkt digitális szabályozással
 udapeti Műzaki é Gazdaágtudoányi Egyete Villaoérnöki é Inforatikai Kar TUDOMÁNYOS DIÁKKÖRI DOLGOZT Mebránebeég-vizacatoláo élyugárzó direkt digitáli zabályozáal Kézítetteték: aláz Géza V. Vill., [email protected]
udapeti Műzaki é Gazdaágtudoányi Egyete Villaoérnöki é Inforatikai Kar TUDOMÁNYOS DIÁKKÖRI DOLGOZT Mebránebeég-vizacatoláo élyugárzó direkt digitáli zabályozáal Kézítetteték: aláz Géza V. Vill., [email protected]
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra
 SOROS KOMPENZÁCIÓ. 2010/11/1. félév. Dr. Aradi Petra") Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
Irányítástechnika (BMEGERIA35I) SOROS KOMPENZÁCIÓ 010/11/1. félév Dr. Aradi Petra Soros kompenzáció Hogyan válasszunk szabályozót? xz xa xr YR Y R YZ YSZSZ xs T H s Y R =? 010.11.1. ASZ 1 1 s 1 s e Y SZ
 É Ő É É Á É Á Ü Ú ű Á ü Á ú ü ú ü Á Á Ú Ü ü ű ú ü ú Ü ű Ü ü ü ű ü ü ű ű ü ü ü ü ü ü ú ü ü ú ű ü ü ü ü ü ü ú Ü ü ü Á Ü ú ü ú ü ü ü ü ü ü ú ü Ú ú ü ü ü ü ú ú ű ú ü ü ú ű ü ü É ú ü ü ü ü ú Á ü ü É Á ü ü ü
É Ő É É Á É Á Ü Ú ű Á ü Á ú ü ú ü Á Á Ú Ü ü ű ú ü ú Ü ű Ü ü ü ű ü ü ű ű ü ü ü ü ü ü ú ü ü ú ű ü ü ü ü ü ü ú Ü ü ü Á Ü ú ü ú ü ü ü ü ü ü ú ü Ú ú ü ü ü ü ú ú ű ú ü ü ú ű ü ü É ú ü ü ü ü ú Á ü ü É Á ü ü ü
MECHANIKA / STATIKA ÉS SZILÁRDSÁGTAN / FELADATOK
 /CSK ISKOLI HSZNÁLTR / ECHNIK / STTIK ÉS SZILÁRDSÁGTN / ELDTOK ÖSSZEÁLLÍTOTT: SZEKERES GYÖRGY . eladat: Cı ellenırzé, ébredı fezültégekre. z " é " pontok közé hegeztett cı tengelyére merılegeen hegeztett
/CSK ISKOLI HSZNÁLTR / ECHNIK / STTIK ÉS SZILÁRDSÁGTN / ELDTOK ÖSSZEÁLLÍTOTT: SZEKERES GYÖRGY . eladat: Cı ellenırzé, ébredı fezültégekre. z " é " pontok közé hegeztett cı tengelyére merılegeen hegeztett
 á ú é é ő é ő á ő ő á á ú ű é é ö ő á ő ú ő ő á é Ü Ü á é á é á é á é á ö ö á é ő á ú ű é é á é é ő á ö ö á á é é ú é é ú á á ő é é é ö ö á á é ű ő á é ű ő ú ő á á é á ú é é á é ö á á ö Ü á á é é ú á á
á ú é é ő é ő á ő ő á á ú ű é é ö ő á ő ú ő ő á é Ü Ü á é á é á é á é á ö ö á é ő á ú ű é é á é é ő á ö ö á á é é ú é é ú á á ő é é é ö ö á á é ű ő á é ű ő ú ő á á é á ú é é á é ö á á ö Ü á á é é ú á á
492 Lantos-Kiss-Harmati: Szabályozástechnika gyakorlatok. 7. Gyakorlat
 49 Lanos-Kiss-Harmai: Sabáloásechnika gakorlaok 7. Gakorla 7. anermi gakorla Idenifikációs algorimusok A korábbi gakorlaok során a sabáloási körben a sakas árvielé a legöbbsör adonak éeleük fel vag fiikai
49 Lanos-Kiss-Harmai: Sabáloásechnika gakorlaok 7. Gakorla 7. anermi gakorla Idenifikációs algorimusok A korábbi gakorlaok során a sabáloási körben a sakas árvielé a legöbbsör adonak éeleük fel vag fiikai
120 Lantos-Kiss-Harmati: Szabályozástechnika gyakorlatok. 2. Gyakorlat. 2. Tantermi gyakorlat Szabályozási kör analízise
 Lantos-Kiss-Harmati: Szabályozástechnika gyakorlatok. Gyakorlat. Tantermi gyakorlat Szabályozási kör analízise A tantermi gyakorlat célja, hogy a hallgatók gyakorlati ismereteket szerezzenek dinamikus
Lantos-Kiss-Harmati: Szabályozástechnika gyakorlatok. Gyakorlat. Tantermi gyakorlat Szabályozási kör analízise A tantermi gyakorlat célja, hogy a hallgatók gyakorlati ismereteket szerezzenek dinamikus

Történeti Áttekintés
 Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
Történeti Áttekintés Történeti Áttekintés Értesülés, Információ Érzékelő Ítéletalkotó Értesülés, Információ Anyag, Energia BE Jelformáló Módosító Termelőeszköz Folyamat Rendelkezés Beavatkozás Anyag,
 É ö ü ú ü ö ú ö ü ö ü ú ü ű ü ü ö ö ö ú ü ö ü ü ö ü ü ü ü ü Ü ü ö ú ü ü ö ö ö ö ö ö ö ö ö ö ö ö ö ö ü ö ü ö ü ö ö ú ö ü ö ü ö ö ö ú ö ö ö ö ú ú ö ü ö ü ú ü Ú É ö ö ö ö ö ú ö ű ö ű ö ú ö ö ú Ú ü ö ö ö ö
É ö ü ú ü ö ú ö ü ö ü ú ü ű ü ü ö ö ö ú ü ö ü ü ö ü ü ü ü ü Ü ü ö ú ü ü ö ö ö ö ö ö ö ö ö ö ö ö ö ö ü ö ü ö ü ö ö ú ö ü ö ü ö ö ö ú ö ö ö ö ú ú ö ü ö ü ú ü Ú É ö ö ö ö ö ú ö ű ö ű ö ú ö ö ú Ú ü ö ö ö ö
3. számú mérés Szélessávú transzformátor vizsgálata
 3. számú mérés Szélessávú transzformátor vizsgálata A mérésben a hallgatók megismerkedhetnek a szélessávú transzformátorok főbb jellemzőivel. A mérési utasítás első része a méréshez szükséges elméleti
3. számú mérés Szélessávú transzformátor vizsgálata A mérésben a hallgatók megismerkedhetnek a szélessávú transzformátorok főbb jellemzőivel. A mérési utasítás első része a méréshez szükséges elméleti
 ő ü ő ü ő ü ő Ő ü ő ú ő ű ü ú ő ű ű ű ú ű ő ő ő ő ő Ó Á Á ő ő ő ő ő ő ő ő Ó Ó ü ő ő ő ő ő ő ő ü ő ü ő ü ü ü ü ü ő Á ő ő ő ő ő ő ő ő ő ő ü ő ü ü ő ű ő ü ő ő ü ő ő ő ü ű ű ű ű ű ú ű ú ű ú ü É ü ő É ű ő ű
ő ü ő ü ő ü ő Ő ü ő ú ő ű ü ú ő ű ű ű ú ű ő ő ő ő ő Ó Á Á ő ő ő ő ő ő ő ő Ó Ó ü ő ő ő ő ő ő ő ü ő ü ő ü ü ü ü ü ő Á ő ő ő ő ő ő ő ő ő ő ü ő ü ü ő ű ő ü ő ő ü ő ő ő ü ű ű ű ű ű ú ű ú ű ú ü É ü ő É ű ő ű
2. Hatványozás, gyökvonás
 2. Hatványozás, gyökvonás I. Elméleti összefoglaló Egész kitevőjű hatvány értelmezése: a 1, ha a R; a 0; a a, ha a R. Ha a R és n N; n > 1, akkor a olyan n tényezős szorzatot jelöl, aminek minden tényezője
2. Hatványozás, gyökvonás I. Elméleti összefoglaló Egész kitevőjű hatvány értelmezése: a 1, ha a R; a 0; a a, ha a R. Ha a R és n N; n > 1, akkor a olyan n tényezős szorzatot jelöl, aminek minden tényezője

 É Ú ű Ö ű ű ű ű ű Ü ű ű ű ű ű Ú Ü ű Ú Ö ű ű Ö ű ű ű ű ű ű ű ű ű ű ű ű ű ű ű ű Ö ű ű ű ű ű ű ű ű Ö Ö ű É ű Ö ű Ö Ú Ó ű ű Ü Ú ű É Ó ű ű ű Ö ű ű É ű É É Ö É É É É É Ö Ö É Ú É Ó Ú É É Ö Ö Ö ű Ó ű Ö ű ű ű ű
É Ú ű Ö ű ű ű ű ű Ü ű ű ű ű ű Ú Ü ű Ú Ö ű ű Ö ű ű ű ű ű ű ű ű ű ű ű ű ű ű ű ű Ö ű ű ű ű ű ű ű ű Ö Ö ű É ű Ö ű Ö Ú Ó ű ű Ü Ú ű É Ó ű ű ű Ö ű ű É ű É É Ö É É É É É Ö Ö É Ú É Ó Ú É É Ö Ö Ö ű Ó ű Ö ű ű ű ű
 Ü Ú Ú Á Á Ő É é ö é é é é é ü ö é é é é é é é é é é ö é ö ö ö é é é é é é ö é é é é ö é ű é é é ö é é é é éé ö é éö é é ö é é é é ö é ű é é é ö ö é é é é é ö é ö é é ö ö é ö é é é é é é ü é é ö é é é é
Ü Ú Ú Á Á Ő É é ö é é é é é ü ö é é é é é é é é é é ö é ö ö ö é é é é é é ö é é é é ö é ű é é é ö é é é é éé ö é éö é é ö é é é é ö é ű é é é ö ö é é é é é ö é ö é é ö ö é ö é é é é é é ü é é ö é é é é
 É Ő ú ú Ü Ú Ü ú Ü Ú Ú Ú Ü Ü Ú ű Ü ú É Ü Ü Ü Ú ú ű Ü Ü Ü ű ű Ü Ü ú Ú ű Ü ű Ú ű Ü ű Ú Ü É É ű É É É É É Ü Ü Ü É ÉÉ Ö ú É É É É ÉÉ É É É ű ú Ó Ö ú Ó Ö ú Ó ú ú Ü Ü ú É É É Ö Ö Ö Ó Ü Ú Ó É É É É Ü Ú Ó Ő Ó ú
É Ő ú ú Ü Ú Ü ú Ü Ú Ú Ú Ü Ü Ú ű Ü ú É Ü Ü Ü Ú ú ű Ü Ü Ü ű ű Ü Ü ú Ú ű Ü ű Ú ű Ü ű Ú Ü É É ű É É É É É Ü Ü Ü É ÉÉ Ö ú É É É É ÉÉ É É É ű ú Ó Ö ú Ó Ö ú Ó ú ú Ü Ü ú É É É Ö Ö Ö Ó Ü Ú Ó É É É É Ü Ú Ó Ő Ó ú
 ö ó É ó Ú ÜÉ ó ö ó ó ö É ó ó ó ó Ü ó ó É ó ó Ú ó ő Úó É ö ó Ü ó ó ó ó Ú ó Ü ó É Ó ő ó ó ó ó ö É ö ó ó Ü ó É ö ó ó ó É ó É Ü ó ó ö ú Ö É Ú É Ü É ó ó ó Ü ó Ü ő É Ö Ó É ó ó ó ó ó ó ó ó ó ö ó Ó ő ö ó ó ó ó
ö ó É ó Ú ÜÉ ó ö ó ó ö É ó ó ó ó Ü ó ó É ó ó Ú ó ő Úó É ö ó Ü ó ó ó ó Ú ó Ü ó É Ó ő ó ó ó ó ö É ö ó ó Ü ó É ö ó ó ó É ó É Ü ó ó ö ú Ö É Ú É Ü É ó ó ó Ü ó Ü ő É Ö Ó É ó ó ó ó ó ó ó ó ó ö ó Ó ő ö ó ó ó ó
 Ú É ő ő ő ő ő Ú É ő ő ő ő ű ű ő ő ő ő ő ű ű ő ő ő Ú ő Ú É É Ú Ú ű ű ő ő É ő Ó ű ű ő ő ű ő É Ó Ü ő ű ő ő ű ő ű Ó É É Ó Ü Ü ő Ú Ü É É Ú É É ő É Ú É Ó É Ü ő ő Ú É ő ő ű ő ű Ú ő Ü É Ú É ő ő É É ű ő Ú É Ü ű
Ú É ő ő ő ő ő Ú É ő ő ő ő ű ű ő ő ő ő ő ű ű ő ő ő Ú ő Ú É É Ú Ú ű ű ő ő É ő Ó ű ű ő ő ű ő É Ó Ü ő ű ő ő ű ő ű Ó É É Ó Ü Ü ő Ú Ü É É Ú É É ő É Ú É Ó É Ü ő ő Ú É ő ő ű ő ű Ú ő Ü É Ú É ő ő É É ű ő Ú É Ü ű
Elméleti közgazdaságtan I.
 Elméleti közgazdaságtan I. lapfogalmak és Mikroökonómia FOGYSZTÓI MGTRTÁS (I. rész) fogasztói preferenciák Eg játék fogasztónak felkínálunk két kosarat azzal, hog bármelik az övé lehet minden egéb feltétel
Elméleti közgazdaságtan I. lapfogalmak és Mikroökonómia FOGYSZTÓI MGTRTÁS (I. rész) fogasztói preferenciák Eg játék fogasztónak felkínálunk két kosarat azzal, hog bármelik az övé lehet minden egéb feltétel
 É ü ü ű ü Ü ü É É ü Ó Ú É É Ö É Ó ű ű ű ű ü ű ü ü Ú ü ű ü ü ű ü Ó ü ü ü ű ü ü ü ü ü ü Ö Ü ű ü ü ü ü ű ü ü É ű ü ü ü ü ű Ü Ö É ü ü ü ü É ü ü ü É ü ű ű ü ü ü ü ü ű ü ü ü Ó ü ü ű ű ü ü ü ü ü ü É ű ü É Ó ü
É ü ü ű ü Ü ü É É ü Ó Ú É É Ö É Ó ű ű ű ű ü ű ü ü Ú ü ű ü ü ű ü Ó ü ü ü ű ü ü ü ü ü ü Ö Ü ű ü ü ü ü ű ü ü É ű ü ü ü ü ű Ü Ö É ü ü ü ü É ü ü ü É ü ű ű ü ü ü ü ü ű ü ü ü Ó ü ü ű ű ü ü ü ü ü ü É ű ü É Ó ü
MEREVSZÁRNYÚ REPÜLŐGÉPEK VEZÉRSÍK-RENDSZEREINEK KIALAKÍTÁSA 3 REPÜLŐKÉPESSÉG
 Dr. Óvári Gula 1 - Dr. Urbán István 2 MEREVSZÁRNYÚ REPÜLŐGÉPEK VEZÉRSÍK-RENDSZEREINEK KILKÍTÁS 3 cikk(soroatban)ben a merev sárnú repülőgépek veérsík rendserinek terveését és építését követheti nomon lépésről
Dr. Óvári Gula 1 - Dr. Urbán István 2 MEREVSZÁRNYÚ REPÜLŐGÉPEK VEZÉRSÍK-RENDSZEREINEK KILKÍTÁS 3 cikk(soroatban)ben a merev sárnú repülőgépek veérsík rendserinek terveését és építését követheti nomon lépésről


 ű ű ú ű ű ú ú Í É ú ú ű ú ű ű ű ű Í ű ú Ü ű ű ú ú ú ú ú ű ű Á Í Ú ú Í ú ű ú ú ú ú ú ú ú ú ú ú ú ú ű ú ű Ú ú ú Í ú ú Ü ű ű ű ú ű Í ú ú ű ű ű ű ű Í ú ű ű ű Í ű ú ú ű Á ú ú ú ű ú ú ú ú ú ű Í ú ú ú ű ű ű ű
ű ű ú ű ű ú ú Í É ú ú ű ú ű ű ű ű Í ű ú Ü ű ű ú ú ú ú ú ű ű Á Í Ú ú Í ú ű ú ú ú ú ú ú ú ú ú ú ú ú ű ú ű Ú ú ú Í ú ú Ü ű ű ű ú ű Í ú ú ű ű ű ű ű Í ú ű ű ű Í ű ú ú ű Á ú ú ú ű ú ú ú ú ú ű Í ú ú ú ű ű ű ű
 Ü ű í í Í ű í í í ű í Í í í í ú Ü Ü í É í ű í Í Ö Í ú ű Ö í ú ű í Ö í É í í í í É Ö É É Ö í í Í É í Ö í í í í ú ú ú í ú í ú É í í í í í Ö í í É í í Ö í í í í í í í í í í í í í Ö Ö Ö í í ú Í Ö Ö í í í
Ü ű í í Í ű í í í ű í Í í í í ú Ü Ü í É í ű í Í Ö Í ú ű Ö í ú ű í Ö í É í í í í É Ö É É Ö í í Í É í Ö í í í í ú ú ú í ú í ú É í í í í í Ö í í É í í Ö í í í í í í í í í í í í í Ö Ö Ö í í ú Í Ö Ö í í í
 É ö é ö ő é é ű í é ö é é é é ő é é í Ő Ő Ő é ö ö é é ö ő é É é é é é é é é é í é é ö é é é é Ö é é é é é é ö Ü é é ö é é é é í é é é é é é é é ö é é é é Ö Ö í í é é ö é é é é é ő é é é ö é é ő é é ő é
É ö é ö ő é é ű í é ö é é é é ő é é í Ő Ő Ő é ö ö é é ö ő é É é é é é é é é é í é é ö é é é é Ö é é é é é é ö Ü é é ö é é é é í é é é é é é é é ö é é é é Ö Ö í í é é ö é é é é é ő é é é ö é é ő é é ő é
Kapcsolóüzemű feszültségstabilizátorok túlterhelés elleni védelme ETO 621.376.722.1:621.316,
 D. EDL ICHÁD BME Mikrohullámú Híradástechnika Tanszék Kapcsolóüzemű feszültségstabilizátorok túlterhelés elleni védelme ETO 621.376.722.1:621.316, A -félvezető kapcsolóeszközök fejlődésének következtében
D. EDL ICHÁD BME Mikrohullámú Híradástechnika Tanszék Kapcsolóüzemű feszültségstabilizátorok túlterhelés elleni védelme ETO 621.376.722.1:621.316, A -félvezető kapcsolóeszközök fejlődésének következtében
3. előadás Stabilitás
 Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
Stabilitás 3. előadás 2011. 09. 19. Alapfogalmak Tekintsük dx dt = f (t, x), x(t 0) = x 0 t (, ), (1) Jelölje t x(t; t 0, x 0 ) vagy x(.; t 0, x 0 ) a KÉF megoldását. Kívánalom: kezdeti állapot kis megváltozása
Fogaskerék hajtások I. alapfogalmak
 Fogaskeék hajtások I. alapfogalmak A fogaskeekek csopotosítása A fogaskeékhajtást az embeiség évszázadok óta használja. A fogazatok geometiája má a 8-9. században kialakult, de a geometiai és sziládsági
Fogaskeék hajtások I. alapfogalmak A fogaskeekek csopotosítása A fogaskeékhajtást az embeiség évszázadok óta használja. A fogazatok geometiája má a 8-9. században kialakult, de a geometiai és sziládsági
A gyakorlatok HF-inak megoldása Az 1. gyakorlat HF-inak megoldása. 1. Tagadások:
 . Tagadások: A gyakorlatok HF-inak megoldása Az. gyakorlat HF-inak megoldása "Nem észak felé kell indulnunk és nem kell visszafordulnunk." "Nem esik az es, vagy nem fúj a szél." "Van olyan puha szilva,
. Tagadások: A gyakorlatok HF-inak megoldása Az. gyakorlat HF-inak megoldása "Nem észak felé kell indulnunk és nem kell visszafordulnunk." "Nem esik az es, vagy nem fúj a szél." "Van olyan puha szilva,
K=1, tiszta anyagokról van szó. Példa: víz, széndioxid. Jelöljük a komponenst A-val.
 EGYKOMPONENS RENDSZEREK FÁZISEGYENSÚLYA FÁZISOK STABILITÁSA: A FÁZISDIAGRAMOK K1, tiszta anyagokról van szó Példa: víz, széndioxid Jelöljük a komonenst A-val Legyen jelen egy ázis Hogyan változik az A
EGYKOMPONENS RENDSZEREK FÁZISEGYENSÚLYA FÁZISOK STABILITÁSA: A FÁZISDIAGRAMOK K1, tiszta anyagokról van szó Példa: víz, széndioxid Jelöljük a komonenst A-val Legyen jelen egy ázis Hogyan változik az A
Az analízis néhány alkalmazása
 Az analízis néhány alkalmazása SZAKDOLGOZAT Eötvös Loránd Tudományegyetem Természettudományi kar Szerz : Fodor Péter Szak: Matematika Bsc Szakirány: Matematikai elemz Témavezet : Sikolya Eszter, adjunktus
Az analízis néhány alkalmazása SZAKDOLGOZAT Eötvös Loránd Tudományegyetem Természettudományi kar Szerz : Fodor Péter Szak: Matematika Bsc Szakirány: Matematikai elemz Témavezet : Sikolya Eszter, adjunktus
DT920 Fordulatszámmérő
 DOC N : DT920 No EEx-62 DT920 Fordulatszámmérő Felhasználói leírás Gyártó: DATCON Ipari Elektronikai Kft 1148 Budapest, Fogarasi út 5 27 ép Tel: 460-1000, Fax: 460-1001 2 Tartalomjegyzék 1 Rendeltetés4
DOC N : DT920 No EEx-62 DT920 Fordulatszámmérő Felhasználói leírás Gyártó: DATCON Ipari Elektronikai Kft 1148 Budapest, Fogarasi út 5 27 ép Tel: 460-1000, Fax: 460-1001 2 Tartalomjegyzék 1 Rendeltetés4
5. ROBOTOK IRÁNYÍTÓ RENDSZERE. 5.1. Robotok belső adatfeldolgozásának struktúrája
 TARTALOM 5. ROBOTOK IRÁNYÍTÓ RENDSZERE... 7 5.. Robotok belső adatfeldolgozásának struktúrája... 7 5.. Koordináta transzformációk... 5... Forgatás... 5... R-P-Y szögek... 5... Homogén transzformációk...
TARTALOM 5. ROBOTOK IRÁNYÍTÓ RENDSZERE... 7 5.. Robotok belső adatfeldolgozásának struktúrája... 7 5.. Koordináta transzformációk... 5... Forgatás... 5... R-P-Y szögek... 5... Homogén transzformációk...
Kiegészítés a Párbeszédes Informatikai Rendszerek tantárgyhoz
 Kiegészítés a Párbeszédes Informatikai Rendszerek tantárgyhoz Fazekas István 2011 R1 Tartalomjegyzék 1. Hangtani alapok...5 1.1 Periodikus jelek...5 1.1.1 Időben periodikus jelek...5 1.1.2 Térben periodikus
Kiegészítés a Párbeszédes Informatikai Rendszerek tantárgyhoz Fazekas István 2011 R1 Tartalomjegyzék 1. Hangtani alapok...5 1.1 Periodikus jelek...5 1.1.1 Időben periodikus jelek...5 1.1.2 Térben periodikus
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 5. óra Mingesz Róbert Szegedi Tudományegyetem 2012. március 10. MA - 5. óra Verzió: 2.1 Utolsó frissítés: 2012. március 12. 1/47 Tartalom I 1 Elektromos mennyiségek mérése 2 A/D konverterek
Mérés és adatgyűjtés 5. óra Mingesz Róbert Szegedi Tudományegyetem 2012. március 10. MA - 5. óra Verzió: 2.1 Utolsó frissítés: 2012. március 12. 1/47 Tartalom I 1 Elektromos mennyiségek mérése 2 A/D konverterek
 Á Á É É É ö É Ó ú Á ú Á Á Á Á ö Á ő ű ú ö ö ú ű ú É ő ö ú ú ű ö ű ő Ú Ú ú ő ö ö ő ö ö Á ö Á ö ú ű ö ö ö ö ö ö ö ö ö ő ö ö ö ö ő ö Á ö ő ö ö ő ú ú ö ö ő ö ö ö ö ú ö ú ö ő ú ö ö ö ö ö ú ö ú ú ö Ú ő ű ő ö
Á Á É É É ö É Ó ú Á ú Á Á Á Á ö Á ő ű ú ö ö ú ű ú É ő ö ú ú ű ö ű ő Ú Ú ú ő ö ö ő ö ö Á ö Á ö ú ű ö ö ö ö ö ö ö ö ö ő ö ö ö ö ő ö Á ö ő ö ö ő ú ú ö ö ő ö ö ö ö ú ö ú ö ő ú ö ö ö ö ö ú ö ú ú ö Ú ő ű ő ö
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Laplace transzformáció
 Laplace tranzformáció 27. márciu 19. 1. Bevezeté Definíció: Legyen f :, R. Az F ) = f t) e t dt függvényt az f függvény Laplace-tranzformáltjának nevezzük, ha a fenti impropriu integrál valamilyen R zámokra
Laplace tranzformáció 27. márciu 19. 1. Bevezeté Definíció: Legyen f :, R. Az F ) = f t) e t dt függvényt az f függvény Laplace-tranzformáltjának nevezzük, ha a fenti impropriu integrál valamilyen R zámokra
Azonosító jel: MATEMATIKA EMELT SZINTŰ ÍRÁSBELI VIZSGA. 2008. október 21. 8:00. Az írásbeli vizsga időtartama: 240 perc
 É RETTSÉGI VIZSGA 2008. október 21. MATEMATIKA EMELT SZINTŰ ÍRÁSBELI VIZSGA 2008. október 21. 8:00 Az írásbeli vizsga időtartama: 240 perc Pótlapok száma Tisztázati Piszkozati OKTATÁSI ÉS KULTURÁLIS MINISZTÉRIUM
É RETTSÉGI VIZSGA 2008. október 21. MATEMATIKA EMELT SZINTŰ ÍRÁSBELI VIZSGA 2008. október 21. 8:00 Az írásbeli vizsga időtartama: 240 perc Pótlapok száma Tisztázati Piszkozati OKTATÁSI ÉS KULTURÁLIS MINISZTÉRIUM
 Í Á É ő ő ő ú ú ő ő ő ő ő ő ő ő í ő ő ő ő ő ű í ő ű ő ú ő ű ő ő ő ő Á í í í ő ő ő ő í í ő í ü ő í ő í í í ő í ő í ő í ő ő í í ő ő ü ő í ő í ő ő ő ő í í í ő í ő ü í í ő ő ő ő ő í ü ű ő í í í ő í í ő ő ő
Í Á É ő ő ő ú ú ő ő ő ő ő ő ő ő í ő ő ő ő ő ű í ő ű ő ú ő ű ő ő ő ő Á í í í ő ő ő ő í í ő í ü ő í ő í í í ő í ő í ő í ő ő í í ő ő ü ő í ő í ő ő ő ő í í í ő í ő ü í í ő ő ő ő ő í ü ű ő í í í ő í í ő ő ő
Determinisztikus folyamatok. Kun Ferenc
 Determinisztikus folyamatok számítógépes modellezése kézirat Kun Ferenc Debreceni Egyetem Elméleti Fizikai Tanszék Debrecen 2001 2 Determinisztikus folyamatok Tartalomjegyzék 1. Determinisztikus folyamatok
Determinisztikus folyamatok számítógépes modellezése kézirat Kun Ferenc Debreceni Egyetem Elméleti Fizikai Tanszék Debrecen 2001 2 Determinisztikus folyamatok Tartalomjegyzék 1. Determinisztikus folyamatok
1. Prefix jelentések. 2. Mi alapján definiáljuk az 1 másodpercet? 3. Mi alapján definiáljuk az 1 métert? 4. Mi a tömegegység definíciója?
 1. Prefix jelentések. 10 1 deka 10-1 deci 10 2 hektó 10-2 centi 10 3 kiló 10-3 milli 10 6 mega 10-6 mikró 10 9 giga 10-9 nano 10 12 tera 10-12 piko 10 15 peta 10-15 fento 10 18 exa 10-18 atto 2. Mi alapján
1. Prefix jelentések. 10 1 deka 10-1 deci 10 2 hektó 10-2 centi 10 3 kiló 10-3 milli 10 6 mega 10-6 mikró 10 9 giga 10-9 nano 10 12 tera 10-12 piko 10 15 peta 10-15 fento 10 18 exa 10-18 atto 2. Mi alapján
Hobbi Elektronika. Bevezetés az elektronikába: Scmitt-trigger kapcsolások
 Hobbi Elektronika Bevezetés az elektronikába: Scmitt-trigger kapcsolások 1 Az NE555 mint Schmitt-trigger Ha az NE555 trigger és treshold bemeneteit közös jellel vezéreljük, hiszterézissel rendelkező billenő
Hobbi Elektronika Bevezetés az elektronikába: Scmitt-trigger kapcsolások 1 Az NE555 mint Schmitt-trigger Ha az NE555 trigger és treshold bemeneteit közös jellel vezéreljük, hiszterézissel rendelkező billenő
SZABÁLYOZÁSI KÖRÖK 2.
 Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
Irányítástechnika (BMEGERIA35I) SZABÁLYOZÁSI KÖRÖK 2. 2010/11/1. félév Dr. Aradi Petra Zárt szabályozási körrel szemben támasztott követelmények tulajdonság időtartományban frekvenciatartományban pontosság
 É ú ú ú ú ú ú ú ú ú É É ú ű ú ű ú Ú Ü ú ú ú ú ű ú ú ű ú ú ú ú ú ú ű ú ú ű Ü ű ű ú É É ű É ű É ú ú ú ű É ú ú ú ú ú ú ú ú ú ú ú ű ú ú ű Á ú É ű ű ú ú ú ú ű ű ű ú ű ú ú ú ú ú ú ű ú ú Ú ű ú ű ű ú ú ű Ü ú ű
É ú ú ú ú ú ú ú ú ú É É ú ű ú ű ú Ú Ü ú ú ú ú ű ú ú ű ú ú ú ú ú ú ű ú ú ű Ü ű ű ú É É ű É ű É ú ú ú ű É ú ú ú ú ú ú ú ú ú ú ú ű ú ú ű Á ú É ű ű ú ú ú ú ű ű ű ú ű ú ú ú ú ú ú ű ú ú Ú ű ú ű ű ú ú ű Ü ú ű
 É ú ú Á É ú É ű Á Ú ú ú ú ű ú É ű ú ú ű ú ú ű ú ú ű ú ú ú ú ú ú ű ű ű ú Á Á ű É É ú ú ú ú ú ú ű Ü ű ű ű Ö Ú ú Ú ú ű ú ú ű ú ű ű ú ú Ö ű ú ú ú ű ű ű ű ú ú É É ű ű É É ú ú ű Á ú ú ú É Ú ű ú ú ű ú ú ú Ü ú
É ú ú Á É ú É ű Á Ú ú ú ú ű ú É ű ú ú ű ú ú ű ú ú ű ú ú ú ú ú ú ű ű ű ú Á Á ű É É ú ú ú ú ú ú ű Ü ű ű ű Ö Ú ú Ú ú ű ú ú ű ú ű ű ú ú Ö ű ú ú ú ű ű ű ű ú ú É É ű ű É É ú ú ű Á ú ú ú É Ú ű ú ú ű ú ú ú Ü ú
Szivattyú- és ventilátorvezérlı alkalmazás
 6-1 (par. 0. 1 = 7) TARTALOM 6.. 6-1 6.1 Általános bevezetı.. 6-2 6.2 Vezérlı I/O. 6-2 6.3 Vezérlıjel-logika.. 6-3 6.4 Alapparaméterek, 1. csoport. 6-4 6.4.1 Paramétertáblázat, 1. csoport 6-4 6.4.2 Az
6-1 (par. 0. 1 = 7) TARTALOM 6.. 6-1 6.1 Általános bevezetı.. 6-2 6.2 Vezérlı I/O. 6-2 6.3 Vezérlıjel-logika.. 6-3 6.4 Alapparaméterek, 1. csoport. 6-4 6.4.1 Paramétertáblázat, 1. csoport 6-4 6.4.2 Az
 É Ő É é ö í é í é í í Ú é é é í í ő ö ö é É Ó É Á í é ő é í í í Í Í í í É É É í é é í Í é Íő é í é í é í í Í ú é é ű í í é í í Í ö ö ő é ö ö é é í Á ő é é é í é Í ö é é é é é é ö Í ö é é é í í é ö í í
É Ő É é ö í é í é í í Ú é é é í í ő ö ö é É Ó É Á í é ő é í í í Í Í í í É É É í é é í Í é Íő é í é í é í í Í ú é é ű í í é í í Í ö ö ő é ö ö é é í Á ő é é é í é Í ö é é é é é é ö Í ö é é é í í é ö í í
 ő Á ú ő ú ő ú ú ú ő ő ő ű ú ű ő ő ú ő ő ő ú Á ő ú ő ő ú ő ő É É ú ő ő Ú ő É ú ú ő ő ő ő ő É ő ő ú É ű ű ű ú ő ő É ő ű ő ő É ú É ú ő ő ű ú ű ő ő ú ú Ú ú Ü ő ű ú ő ű ő ő ú ő ő ő ő ú ő ő ú ú ő ú ő ú ű ű É
ő Á ú ő ú ő ú ú ú ő ő ő ű ú ű ő ő ú ő ő ő ú Á ő ú ő ő ú ő ő É É ú ő ő Ú ő É ú ú ő ő ő ő ő É ő ő ú É ű ű ű ú ő ő É ő ű ő ő É ú É ú ő ő ű ú ű ő ő ú ú Ú ú Ü ő ű ú ő ű ő ő ú ő ő ő ő ú ő ő ú ú ő ú ő ú ű ű É
 Á ö ü ö ő ö ű ö ú ú ö ú ő ő Á ő ő ö ú ü ő ő ú ő ő ő ő ö ü ő ő ú ő ö ö ü ü ő ö ü ü ö ő ú ő ő ő ö ú ú ö ö ú ő ü ü Ü ő ö ő ű ü ö ú ú ú ö ő ö ő ö ú ö ű ő ő ö ő ö ü ö É É É É Ú É É É É É öö É É ő É ö É
Á ö ü ö ő ö ű ö ú ú ö ú ő ő Á ő ő ö ú ü ő ő ú ő ő ő ő ö ü ő ő ú ő ö ö ü ü ő ö ü ü ö ő ú ő ő ő ö ú ú ö ö ú ő ü ü Ü ő ö ő ű ü ö ú ú ú ö ő ö ő ö ú ö ű ő ő ö ő ö ü ö É É É É Ú É É É É É öö É É ő É ö É
PILÓTANÉLKÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNEK ELŐZETES MÉRETEZÉSE. Bevezetés. 1. Időtartománybeli szabályozótervezési módszerek
 Szabolcsi Róbert Szegedi Péter PILÓTANÉLÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNE ELŐZETES MÉRETEZÉSE Bevezetés A cikkben a Szojka III pilótanélküli repülőgép [8] szakirodalomban rendelkezésre álló matematikai
Szabolcsi Róbert Szegedi Péter PILÓTANÉLÜLI REPÜLŐGÉP REPÜLÉSSZABÁLYOZÓ RENDSZERÉNE ELŐZETES MÉRETEZÉSE Bevezetés A cikkben a Szojka III pilótanélküli repülőgép [8] szakirodalomban rendelkezésre álló matematikai
 É Ú ú Á Ú Ú Á Á Ú ú ú ú Ú ú Á Ú Ü Ü ű ű ú ú ú ú Ü ú Ü Ú ú ű ú É ú Ü ű ú ú Ú É É Á Á Á Á Ü ú Á Á É Ú É ú Á Ü É Ü Ü Ü Ü Á Á ű ú ű ú Ü ű Á ú ű ű ú ű ű ű ú ű ű ű ű ú Ü É ű ú ű Ü ű ú ű Ü Ü Ü ú Ú ú ú ú ű ú ű
É Ú ú Á Ú Ú Á Á Ú ú ú ú Ú ú Á Ú Ü Ü ű ű ú ú ú ú Ü ú Ü Ú ú ű ú É ú Ü ű ú ú Ú É É Á Á Á Á Ü ú Á Á É Ú É ú Á Ü É Ü Ü Ü Ü Á Á ű ú ű ú Ü ű Á ú ű ű ú ű ű ű ú ű ű ű ű ú Ü É ű ú ű Ü ű ú ű Ü Ü Ü ú Ú ú ú ú ű ú ű
 Á ű Ú ÚÉ Á Á Ü Ü ű Ü Ü Ü Ú Ü Ü Ü É Ú Ü ű Ü Ü Ö ű ű Ü Ü Ü Ü Ü ű ű ű Ú ű ű Ú ű ű ű ű Á Ú É Á ű Á É Á Ú ű Á Á Á Á Á Á Á Á Á Á Á Á Á Á Á Á Á Á ű Á Á Á Á Á É ű Ü ű Á ű ű ű Á ű Ú Ó Á Á ű Ú ű Ü ű Ü Á Á ű ű É
Á ű Ú ÚÉ Á Á Ü Ü ű Ü Ü Ü Ú Ü Ü Ü É Ú Ü ű Ü Ü Ö ű ű Ü Ü Ü Ü Ü ű ű ű Ú ű ű Ú ű ű ű ű Á Ú É Á ű Á É Á Ú ű Á Á Á Á Á Á Á Á Á Á Á Á Á Á Á Á Á Á ű Á Á Á Á Á É ű Ü ű Á ű ű ű Á ű Ú Ó Á Á ű Ú ű Ü ű Ü Á Á ű ű É
 ú ő ü ő ő ü ő ű ű ő ü ü ő ő Ü Á ő ü ő ő ü ő ő ü ő ú ő ő ő ü ő ő ő ő ő ő ü ő ü ő ő ű ű ő ü ő ő ő ü ő ü ő ű ő ü ő ő ő ő ü ü ü ő ő ű ú ü ü ő ő ő ő ü ü ő ő ő ü ő ő ő ő ű ő ú ő ő ü ő ő ü ő ő ő ű ő ő ű ü ü ő
ú ő ü ő ő ü ő ű ű ő ü ü ő ő Ü Á ő ü ő ő ü ő ő ü ő ú ő ő ő ü ő ő ő ő ő ő ü ő ü ő ő ű ű ő ü ő ő ő ü ő ü ő ű ő ü ő ő ő ő ü ü ü ő ő ű ú ü ü ő ő ő ő ü ü ő ő ő ü ő ő ő ő ű ő ú ő ő ü ő ő ü ő ő ő ű ő ő ű ü ü ő