Képregisztrációs eljárások. Orvosi képdiagnosztika 2016 ősz
|
|
|
- Erzsébet Rebeka Borosné
- 7 évvel ezelőtt
- Látták:
Átírás
1 Képregisztrációs eljárások Orvosi képdiagnosztika 06 ősz
2 Két kép egymáshoz igazítása, illesztése Példák: Időbeli követés Regisztráció célja Eltérő modalitások (PET-CT, Röntgen-MRI, UH-MRI,...) fúzió Műtét (menet közbeni felvétel előzetes felvétellel való összevetése) Kép alapú egyéb beavatkozás (besugárzás beállítás... ) Mozgás hatásának kompenzációja I és I : referencia kép, új kép A regisztrációs eljárások elemei: Transzformáció, interpoláció, hasonlósági metrika, optimalizálási algoritmus

3 Regisztráció célja Korábbi felvétel Időbeli követés Későbbi, ellenőrző felvétel

4 Korábbi felvétel Regisztráció célja Időbeli követés Egyszerű kivonás

5 Regisztráció célja Időbeli követés Korábbi felvétel merev regisztráció Merev regisztráció utáni kivonás
6 Regisztráció célja Időbeli követés Korábbi merev regisztráció Későbbi rugalmas regisztrációval elastic B-spline registration

7 Regisztráció célja Időbeli követés Korábbi merev regisztrációval Végső összehasonlítás

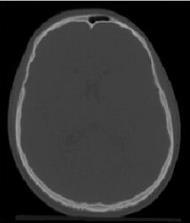
8 Fúzióra: MRI-CT, PET-CT Regisztráció célja CT csontok, MRI lágy részek, PET anyagcsere aktivitás (tumor, gyulladás
9 Regisztráció célja I (x,y)=g (I (f (x,y)) f () D képbeli transzformáció g() D intenzitás transzformáció Feltételezve, hogy a megfeleltetés ismert keressük azt az f () és g() függvényt, hogy a két kép a lehető legjobban illeszkedjen (valamilyen kritérium értelmében)
10 Regisztráció csoportosítása Dimenzió: D-D, D-3D, 3D-3D A regisztráció bázisa pontok vonalak, felületek,... Geometriai transzformáció merev, nem merev Az interaktivitás mértéke teljesen automatikus, emberi közreműködés Optimalizáló eljárás hasonlóságmérték, hibafüggvény zárt forma, analitikus megoldás, iteratív megoldás Modalitás azonos különböző (multimodalitás) A regisztáció objektuma azonos, különböző (fúzió)
11 Képbeli (sík) transzformációk Merev Nem merev Affin: egyenestartó párhuzamosság megtartó Projektív: egyenestartó Perspektívikus Görbült, általános nemlineáris: globális polinom Görbült, általános nemlineáris: lokális polinom Általános nemlineáris: Spline, RBF, neuronháló...
 p x y Skálázás sorrendje nem közömbös.")
")
12 Merev Transzformáció Forgatás (R) Eltolás (t) Skálázás (s) p x y Skálázás sorrendje nem közömbös. Általában: Rs sr Izotróp skálázás: hasonlósági transzformáció p x y p t srp s s s p t Rsp t t t cos( ) sin( ) R sin( ) cos( )
13 Affin transzformáció Forgatás Eltolás Skálázás Nyírás x y a a 3 3 a a a a x y A hosszak és a szögek megtartása nem teljesül A párhuzamosok párhuzamosak maradnak, síkok síkok maradnak p t Rp R elemeire (a ij ) nincs semmi megkötés azon kívül, hogy nem szinguláris
14 Affin transzformáció Kiindulás: vegyünk egy euklideszi síkot. A síkon vett affin transzformáción egy olyan : bijektív leképezést értünk, amely tetszőleges -beli egyenest -beli egyenesbe képez le. Affin transzformáció: a sík egy kölcsönösen egyértelmű, egyenestartó leképezése. a) párhuzamos egyeneseket párhuzamos egyenesekbe képez b) parallelogrammát parallelogrammába képez A sík minden egybevágósági és hasonlósági transzformációja is affin transzformáció.
15 Projektív transzformáció Megtartja az egyeneseket és a síkokat (x,y ) eredeti koordináták (x,y ) transzformált koordináták x a x a y a 3 a x a y a y a x a y a 3 a x a y a p Rp T vp t R a a a a t a a 3 3 a a 3 v 33 3 a a ij együtthatók a kép és a síkok egyenleteiből számíthatók
16 Összetett transzformációk görbült (nemlineáris) transzformációk Globális polinomiális transzformáció Lehet többváltozós polinom is: p I, J i j cij xy i, j ( x) ( y) T P x P y ( ) ( ) Túl nagy fokszám veszélyei: oszcilláció, túlilleszkedés általában I, J
17 Összetett transzformációk görbült (nemlineáris) transzformációk Oszcilláció elkerülése: szakaszonként polinomiális traszformáció: a tér particionálása négyszögletes tartományokra Minden i,j tartományra T transzformációt hajtunk végre, ahol P egy egyváltozás m-ed fokú polinom x y T P ( x) P ( y) i, j i, j A négyszögletes tartományok határán a folytonosság, ill. a folytonos differenciálhatóság biztosítható: spline (gyakori: köbös spline, B-spline). Egyenletes csomopont elhelyezés mellett Egyváltozós B-splineok B B j k j ( x) ( x) 0 x j- j-k ha j-k B j k x I egyébként j x j ( x) B Többváltozós: tenzorszorzatttal: j j-k j k g ( x) N x g i x i i I j =( j- j ] a j-edik bemeneti intervallum
18 Összetett transzformációk ) görbült (nemlineáris) transzformációk Általános folytonos nemlineáris transzformációk Tetszölegesen elhelyezett kontrolpontoknál is működik Radiális bázisfüggvényes leképezés Szakaszonként lineáris Köbös Multikvadratikus, ha =/ Inverz multikvadratikus, ha = Thin plate spline Gauss g r r 3 r g r g r c r g r c r g r r ln r
19 Regisztrációs eljárások elemei Jellemzők meghatározása Hasonlósági mértékek definiálása Keresési stratégiák / optimalizálás végrehajtása
20 Jellemzők: Jellemző alapú regisztráció Kiugró (kitüntetett) struktúra elemek. Sarokpontok, görbület lokális maximuma, maximális varianciájú ablak középpontja, egy zárt régió súlypontja, egyenesek metszéspontjai, stb. Élek kontúrok, felületek (képi struktúrák, zajra kevésbé érzékeny) Intenzitás (a teljes képet felhasználja) Statisztikai jellemzők. Momentumok, főtengelyek, információelméleti jellemzők, mennyiségek Magasabbszintű jellemzők: szintaktikai jellemzők: a mintákból származtatott nyelvtan,...
21 Regisztrációs módszerek Pont alapú Intenzitás alapú (Korreláció, stb) Fourier
22 Pont leképezés alapú regisztráció Referenciapontok meghatározása Referenciapontok: anatómiai jelentéssel rendelkező pontok egyéb markerpontok: jól megkülönböztethető, azonosítható pontok Fontos a pontok minél pontosabb meghatározása (lokalizációs hiba) Interaktív bejelölés Automatikus kiválasztás Megfelelő transzformáció keresése a pontok megfeleltetéséhez
23 Pont leképezés alapú regisztráció Regisztráció minősítése, kritériumfüggvény - egybevágósági: Ortogonális Procrustes Véletlen nulla várható értékű, izotróp eloszlású hiba
24 Regisztrációs algoritmusok. Pont alapú merev regisztráció (egybevágósági transzf): Kritériumfüggvény: súlyozott négyzetes eltérés (minimumkeresés R és t szerint) N C(, ) R t w súlyok ahol i Rxi t y w i i FLE N FLE i lokalizációs hiba. Súlyozott centroidok: x. Középpont eltolás 3. Súlyozott kovarianciamátrix számítás H i N N wi xi / wi N i i y x x x; y y y i i i i N N wi yi / wi N i i i N w i x y T i i i T T T H UΛV U U V V I Λ diag(, ) 0 R V diag(,det( VU)) U t y Rx T
25 Regisztrációs algoritmusok. Hasonlósági transzformáció Keressük R, t és s értékeit, melyek mellett minimális: s C( R, t, s) w srx t y N i N i w T i i i w t y srx Rx y xy N i T i i i i i i Legyen s= Határozzuk meg R-et az előző alg..-5. lépései szerint Számítsunk új s-et és végezzük el a transzformációt
26 3. Nemizotróp skálázás Regisztrációs algoritmusok Keressük R, t és S értékeit, melyek mellett minimális: N C( R, t, S) wi RSxi t yi N i Határozzuk meg az x és y középértékeket és az eltolt értékeket: x y Legyen n= Válasszunk kezdeti skálázási mátrixot S (0) iteráció: ( n) ( n) - Legyen xi S xi - Hajtsuk végre az. algoritmus lépéseit R meghatározására - n=n+ - Határozzuk meg S (n) -t - Álljunk le, ha n> max iterációs szám, vagy ha a hiba küszöb alá ment
 I ( x u, y v) Hasonlóságot mér különböző eltolások esetén A normalizálás a lokális intenzitás hatásának")
27 Intenzitás alapú eljárás Korreláció A két kép D normalizált korrelációs függvénye Cuv (, ) x y x y I ( x, y) I( x u, y v) I ( x u, y v) Hasonlóságot mér különböző eltolások esetén A normalizálás a lokális intenzitás hatásának kiküszöbölésére
28 Korreláció tétel A két kép korrelációjának Fourier transzformáltja az egyik kép Fourier transzformáltjának a szorzata a másik Fourier transzformáltjának komplex konjugáltjával. Egydimenziós esetre a korreláció tétel exp z x t y t dt x t Y j t ddt z Y x t exp j t dt exp j d Z Y X
29 Fourier transzformáción alapuló módszerek Fázis-korreláció Kereszt teljesítmény spektrum Teljesítmény cepstrum A Fourier transzformáción alapuló módszerek hatékonyak, de csak merev transzformációknál működnek (lineáris transzformációk) Ez is intenzitás alapú eljárás lokális intenzitásváltozásokat képtelen követni.
30 Fázis korreláció alapú regisztráció eltolás transzformáció identifikálására Egymáshoz képest eltolt képek transzformációjának identifikációja Eltolás modellezhető egy megfelelő helyen lévő diracdeltával történő konvolúcióval. F x x0 exp j x0 Tehát Fyx x0 Y exp j x0 Vizsgáljuk meg a két jel kereszt teljesítmény spektrumát: exp j x0 Y Y Y Y Innen az eltolás már könnyen kiszámítható F exp j x F Y Y Y Y x x 0 0 Lokális intenzitásváltozásokat nem képes figyelembe venni
31 Fázis korreláció alapú regisztráció elforgatás transzformáció identifikálására Egy kép fokkal középpontja körüli elforgatása a kép spektrumát is ilyen mértékben forgatja el: Egyszerűen belátható a Fourier vetítősík tétel alkalmazásával Ampl. spektrum eltolás invariáns: Tehát ha az ampl. spektrum elfordulását meg tudnánk határozni, akkor kész lenne a regisztráció Az elforgatás az ampl. spektrum polár koordinátás felírása esetén megegyezik a vízszintes tengellyel bezárt szög szerinti cirkuláris eltolással Tehát visszavezettük a problémát az eltolás meghatározására
32 Fourier vetítősík tétel

33 Példa Fourier regisztráció


34 frekvencia frekvencia Példa Fourier regisztráció A két kép ampl. spektruma polárkoordinátás ábrázolásban theta theta
35 Merev transzformáció Fourier regisztráció Teljesítmény cepstrum alkalmazásával egyszerűbb: Eltolás: Eltolás + elforgatás:

36 Fourier regisztráció példa
37 Hasonlóság mértékek Intenzitás alapú eljárásokhoz Kép különbségképzés: SSD sum of squares of intensity differences N SSD I( i) I ( i) N Korrelációs együttható Cuv (, ) i x y x y I ( x, y) I( x u, y v) I ( x u, y v) Együttes sűrűségfüggvény PDF( j, k) Hist( j, k) jk, Hist( j, k) ahol Hist(j,k) a két kép együttes hisztogramja

38 Együttes hisztogram MR-MR MR-CT MR-PET illeszkedő kis elmozdulás nagyobb elmozdulás

39 Együttes hisztogram - fúziós regisztrációs

40 Együttes hisztogram - fúziós regisztrációs tökéletesen illeszkedő mm elmozdulás 5mm elmozdulás képek az egyik képnél Megfigyelés: a két kép tökéletes illesztésénél az együttes hisztogram a legélesebb
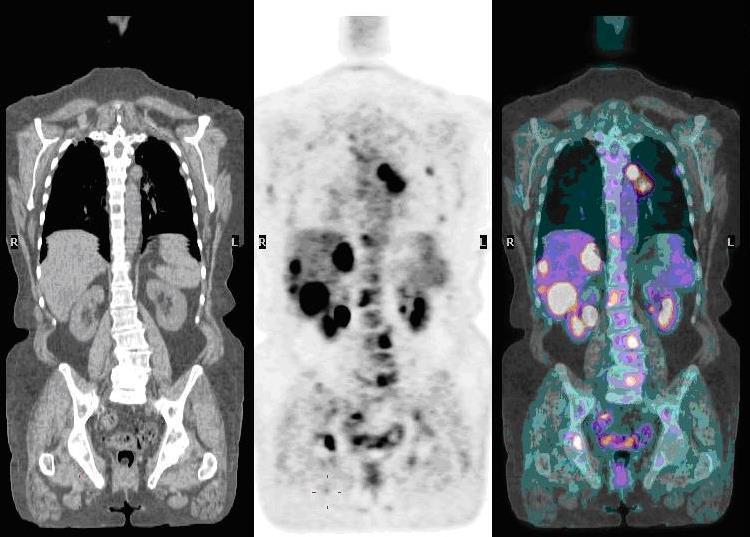
41 PET - CT
42 H p( s)log p( s) s Hasonlóság mértékek Intenzitás alapú eljárásokhoz Entrópia Az együttes entrópia (minimalizálás) H PDF ( j, k)log PDF ( j, k) jk, Kölcsönös információ (maximalizálás) MI(I, I ) = H(I )+H(I )-H(I,I ) ij pij i, j pp i j p, i KL( I, I ') p, i log i p, i MI ( I, I ') log Kullback-Leibler divergencia p
43 Hasonlósági metrikák Normalizált keresztkorrelációs függvény Fehér zajnál hatékony, lokális torzításokra érzékeny. Nehéz a korrelációtérben nagy csúcsot találni Korrelációs együttható Fázis korreláció Frekvenciafüggő zajra nem érzékeny Az intenzitáskülönbségek abszolút értékeinek összege Hatékonyan számítható, ha nincsenek lokális torzítások, jó egyezést lehet találni Kontúr/felszín különbségek Strukturális regisztráció esetén jó Előjelváltások száma a pontonkénti intenzitáskülönbségeknél Nem hasonló képeknél működik jól
Képregisztrációs eljárások. Orvosi képdiagnosztika 13. ea ősz
 Képregisztrációs eljárások Orvosi képdiagnosztika 3. ea. 05 ősz Két kép egymáshoz igazítása, illesztése Példák: Időbeli követés Regisztráció célja Eltérő modalitások (PET-CT, Röntgen-MRI, UH-MRI,...) fúzió
Képregisztrációs eljárások Orvosi képdiagnosztika 3. ea. 05 ősz Két kép egymáshoz igazítása, illesztése Példák: Időbeli követés Regisztráció célja Eltérő modalitások (PET-CT, Röntgen-MRI, UH-MRI,...) fúzió
Transzformációk síkon, térben
 Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Panorámakép készítése
 Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
Térbeli transzformációk, a tér leképezése síkra
 Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Számítási feladatok a Számítógépi geometria órához
 Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
A KLT (Kanade Lucas Tomasi) Feature Tracker Működése (jellegzetes pontok választása és követése)
 Feature Tracker Működése (jellegzetes pontok választása és követése)") A KL (Kanade Lucas omasi) Feature racker Működése (jellegzetes pontok választása és követése) Készítette: Hajder Levente 008.11.18. 1. Feladat A rendelkezésre álló videó egy adott képkockájából minél több
A KL (Kanade Lucas omasi) Feature racker Működése (jellegzetes pontok választása és követése) Készítette: Hajder Levente 008.11.18. 1. Feladat A rendelkezésre álló videó egy adott képkockájából minél több
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Számítógépes geometria
 2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
Bevezetés. Transzformáció
 Geoinformatika alapjai ea. VI. Bevezetés GIS mőveletek I. Tematika Számonkérés Irodalom Transzformáció 28.5.6. Transzformációk típusai formátum geometriai 28.5.6. 2 Geometriai transzformáció I. Célja:
Geoinformatika alapjai ea. VI. Bevezetés GIS mőveletek I. Tematika Számonkérés Irodalom Transzformáció 28.5.6. Transzformációk típusai formátum geometriai 28.5.6. 2 Geometriai transzformáció I. Célja:
Robotika. Kinematika. Magyar Attila
 Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
8. Pontmegfeleltetések
 8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag. Mátrix rangja
 VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Grafikonok automatikus elemzése
 Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Principal Component Analysis
 Principal Component Analysis Principal Component Analysis Principal Component Analysis Definíció Ortogonális transzformáció, amely az adatokat egy új koordinátarendszerbe transzformálja úgy, hogy a koordináták
Principal Component Analysis Principal Component Analysis Principal Component Analysis Definíció Ortogonális transzformáció, amely az adatokat egy új koordinátarendszerbe transzformálja úgy, hogy a koordináták
Numerikus módszerek 1.
 Numerikus módszerek 1. Tantárgy kódja: IP-08bNM1E, IP-08bNM1G (2+2) Az elsajátítandó ismeretanyag rövid leírása: A lebegıpontos számábrázolás egy modellje. A hibaszámítás elemei. Lineáris egyenletrendszerek
Numerikus módszerek 1. Tantárgy kódja: IP-08bNM1E, IP-08bNM1G (2+2) Az elsajátítandó ismeretanyag rövid leírása: A lebegıpontos számábrázolás egy modellje. A hibaszámítás elemei. Lineáris egyenletrendszerek
Képszegmentáló eljárások. Orvosi képdiagnosztika 2018 ősz
 Képszegmentáló eljárások Orvosi képdiagnosztika 2018 ősz Képszegmentálás Anatómiai részek elkülönítés: pl. csontok, szív, erek, szürkefehér állomány, stb Vizsgálandó terület körbehatárolása: pl. tüdőterület
Képszegmentáló eljárások Orvosi képdiagnosztika 2018 ősz Képszegmentálás Anatómiai részek elkülönítés: pl. csontok, szív, erek, szürkefehér állomány, stb Vizsgálandó terület körbehatárolása: pl. tüdőterület
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Feladatok Házi feladat. Keszeg Attila
 2016.01.29. 1 2 3 4 Adott egy O pont és egy λ 0 valós szám. a tér minden egyes P pontjához rendeljünk hozzá egy P pontot, a következő módon: 1 ha P = O, akkor P = P 2 ha P O, akkor P az OP egyenes azon
2016.01.29. 1 2 3 4 Adott egy O pont és egy λ 0 valós szám. a tér minden egyes P pontjához rendeljünk hozzá egy P pontot, a következő módon: 1 ha P = O, akkor P = P 2 ha P O, akkor P az OP egyenes azon
Fourier térbeli analízis, inverz probléma. Orvosi képdiagnosztika 5-7. ea ősz
 Fourier térbeli analízis, inverz probléma Orvosi képdiagnosztika 5-7. ea. 2017 ősz 5. Előadás témái Fourier transzformációk és kapcsolataik: FS, FT, DTFT, DFT, DFS Mintavételezés, interpoláció Folytonos
Fourier térbeli analízis, inverz probléma Orvosi képdiagnosztika 5-7. ea. 2017 ősz 5. Előadás témái Fourier transzformációk és kapcsolataik: FS, FT, DTFT, DFT, DFS Mintavételezés, interpoláció Folytonos
Digitális képek szegmentálása. 5. Textúra. Kató Zoltán.
 Digitális képek szegmentálása 5. Textúra Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Textúra fogalma Sklansky: Egy képen egy területnek állandó textúrája van ha a lokális statisztikák vagy
Digitális képek szegmentálása 5. Textúra Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Textúra fogalma Sklansky: Egy képen egy területnek állandó textúrája van ha a lokális statisztikák vagy
Gyakorló feladatok. Agbeko Kwami Nutefe és Nagy Noémi
 Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Pontműveletek. Sergyán Szabolcs Óbudai Egyetem Neumann János Informatikai Kar február 20.
 Pontműveletek Sergyán Szabolcs sergyan.szabolcs@nik.uni-obuda.hu Óbudai Egyetem Neumann János Informatikai Kar 2012. február 20. Sergyán (OE NIK) Pontműveletek 2012. február 20. 1 / 40 Felhasznált irodalom
Pontműveletek Sergyán Szabolcs sergyan.szabolcs@nik.uni-obuda.hu Óbudai Egyetem Neumann János Informatikai Kar 2012. február 20. Sergyán (OE NIK) Pontműveletek 2012. február 20. 1 / 40 Felhasznált irodalom
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport
 Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN. 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1
 DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
DINAMIKAI VIZSGÁLAT OPERÁTOROS TARTOMÁNYBAN 2003.10.30. Dr. Aradi Petra, Dr. Niedermayer Péter: Rendszertechnika segédlet 1 Differenciálegyenlet megoldása u(t) diff. egyenlet v(t) a n d n v m dt a dv n
Least Squares becslés
 Least Squares becslés A négyzetes hibafüggvény: i d i ( ) φx i A négyzetes hibafüggvény mellett a minimumot biztosító megoldás W=( d LS becslés A gradiens számítása és nullává tétele eredményeképp A megoldás
Least Squares becslés A négyzetes hibafüggvény: i d i ( ) φx i A négyzetes hibafüggvény mellett a minimumot biztosító megoldás W=( d LS becslés A gradiens számítása és nullává tétele eredményeképp A megoldás
Diszkréten mintavételezett függvények
 Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
HÁZI FELADATOK. 1. félév. 1. konferencia A lineáris algebra alapjai
 HÁZI FELADATOK. félév. konferencia A lineáris algebra alapjai Értékelés:. egység: önálló feladatmegoldás.8. Döntse el, párhuzamosak-e a következő vektorpárok: a) a( ; ; 7) b(; 5; ) b) c(; 9; 5) d(8; 6;
HÁZI FELADATOK. félév. konferencia A lineáris algebra alapjai Értékelés:. egység: önálló feladatmegoldás.8. Döntse el, párhuzamosak-e a következő vektorpárok: a) a( ; ; 7) b(; 5; ) b) c(; 9; 5) d(8; 6;
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Geometria III.
 Geometria III.") Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Feladatok a Gazdasági matematika II. tárgy gyakorlataihoz
 Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Példák jellemzőkre: - minden pixelérték egy jellemző pl. neurális hálózat esetében csak kis képekre, nem invariáns sem a megvilágításra, sem a geom.
 Lépések 1. tanító és teszt halmaz összeállítása / megszerzése 2. jellemzők kinyerése 3. tanító eljárás választása Sok vagy kevés adat áll-e rendelkezésünkre? Mennyi tanítási idő/memória áll rendelkezésre?
Lépések 1. tanító és teszt halmaz összeállítása / megszerzése 2. jellemzők kinyerése 3. tanító eljárás választása Sok vagy kevés adat áll-e rendelkezésünkre? Mennyi tanítási idő/memória áll rendelkezésre?
Geometria. a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk)
") 1. Térelemek Geometria a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk) b. Def: félegyenes, szakasz, félsík, féltér. c. Kölcsönös helyzetük: i. pont és (egyenes vagy
1. Térelemek Geometria a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk) b. Def: félegyenes, szakasz, félsík, féltér. c. Kölcsönös helyzetük: i. pont és (egyenes vagy
Geofizikai kutatómódszerek I.
 Geofizikai kutatómódszerek I. A gravitációs és mágneses kutatómódszer Dr. Szabó Norbert Péter egyetemi docens Miskolci Egyetem Geofizikai Intézeti Tanszék e-mail: norbert.szabo.phd@gmail.com 1. A gravitációs
Geofizikai kutatómódszerek I. A gravitációs és mágneses kutatómódszer Dr. Szabó Norbert Péter egyetemi docens Miskolci Egyetem Geofizikai Intézeti Tanszék e-mail: norbert.szabo.phd@gmail.com 1. A gravitációs
Nemlineáris egyenletrendszerek megoldása április 15.
 Nemlineáris egyenletrendszerek megoldása 2014. április 15. Nemlineáris egyenletrendszerek Az egyenletrendszer a következő formában adott: f i (x 1, x 2,..., x M ) = 0 i = 1...N az f i függvények az x j
Nemlineáris egyenletrendszerek megoldása 2014. április 15. Nemlineáris egyenletrendszerek Az egyenletrendszer a következő formában adott: f i (x 1, x 2,..., x M ) = 0 i = 1...N az f i függvények az x j
LINEÁRIS ALGEBRA. matematika alapszak. Euklideszi terek. SZTE Bolyai Intézet, őszi félév. Euklideszi terek LINEÁRIS ALGEBRA 1 / 40
 LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
Függvények Megoldások
 Függvények Megoldások ) Az ábrán egy ; intervallumon értelmezett függvény grafikonja látható. Válassza ki a felsoroltakból a függvény hozzárendelési szabályát! a) x x b) x x + c) x ( x + ) b) Az x függvény
Függvények Megoldások ) Az ábrán egy ; intervallumon értelmezett függvény grafikonja látható. Válassza ki a felsoroltakból a függvény hozzárendelési szabályát! a) x x b) x x + c) x ( x + ) b) Az x függvény
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
Fraktálok. Kontrakciók Affin leképezések. Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék. TARTALOMJEGYZÉK Kontrakciók Affin transzformációk
 Fraktálok Kontrakciók Affin leképezések Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék TARTALOMJEGYZÉK 1 of 71 A Lipschitz tulajdonság ÁTMÉRŐ, PONT ÉS HALMAZ TÁVOLSÁGA Definíció Az (S, ρ) metrikus tér
Fraktálok Kontrakciók Affin leképezések Czirbusz Sándor ELTE IK, Komputeralgebra Tanszék TARTALOMJEGYZÉK 1 of 71 A Lipschitz tulajdonság ÁTMÉRŐ, PONT ÉS HALMAZ TÁVOLSÁGA Definíció Az (S, ρ) metrikus tér
Vektorterek. =a gyakorlatokon megoldásra ajánlott
 Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Képfeldolgozás. 1. el adás. A képfeldolgozás m veletei. Mechatronikai mérnök szak BME, 2008
 Képfeldolgozás 1. el adás. A képfeldolgozás m veletei Mechatronikai mérnök szak BME, 2008 1 / 61 Alapfogalmak transzformációk Deníció Deníció Geometriai korrekciókra akkor van szükség, ha a képr l valódi
Képfeldolgozás 1. el adás. A képfeldolgozás m veletei Mechatronikai mérnök szak BME, 2008 1 / 61 Alapfogalmak transzformációk Deníció Deníció Geometriai korrekciókra akkor van szükség, ha a képr l valódi
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
6. gyakorlat. Gelle Kitti. Csendes Tibor Somogyi Viktor. London András. jegyzetei alapján
 Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján. Típusok: felügyelt és felügyelet nélküli tanuló eljárások
 Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján Típusok: felügyelt és felügyelet nélküli tanuló eljárások Különbség: előbbinél szükséges egy olyan tanulóhalmaz, ahol ismert a minták
Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján Típusok: felügyelt és felügyelet nélküli tanuló eljárások Különbség: előbbinél szükséges egy olyan tanulóhalmaz, ahol ismert a minták
11. Alakzatjellemzők. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 11. Alakzatjellemzők Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Alakzat = pontok összefüggő rendszere példák síkbeli alakzatokra 3 Az
11. Alakzatjellemzők Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Alakzat = pontok összefüggő rendszere példák síkbeli alakzatokra 3 Az
1. Komplex számok. x 2 = 1 és x 2 + x + 1 = 0. egyenletek megoldását számnak tekinthessük:
 . Komplex számok A valós számok és a számegyenes pontjai között kölcsönösen egyértelmű megfeleltetés létesíthető. A számfogalom a számegyenes pontjainak körében nem bővíthető tovább. A számfogalom bővítését
. Komplex számok A valós számok és a számegyenes pontjai között kölcsönösen egyértelmű megfeleltetés létesíthető. A számfogalom a számegyenes pontjainak körében nem bővíthető tovább. A számfogalom bővítését
Gauss-Jordan módszer Legkisebb négyzetek módszere, egyenes LNM, polinom LNM, függvény. Lineáris algebra numerikus módszerei
 A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
Haladó lineáris algebra
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
Számítógépes képelemzés 7. előadás. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
1. feladatsor Komplex számok
 . feladatsor Komplex számok.. Feladat. Kanonikus alakban számolva határozzuk meg az alábbi műveletek eredményét. (a) i 0 ; i 8 ; (b) + 4i; 3 i (c) ( + 5i)( 6i); (d) i 3+i ; (e) 3i ; (f) ( +3i)(8+i) ( 4
. feladatsor Komplex számok.. Feladat. Kanonikus alakban számolva határozzuk meg az alábbi műveletek eredményét. (a) i 0 ; i 8 ; (b) + 4i; 3 i (c) ( + 5i)( 6i); (d) i 3+i ; (e) 3i ; (f) ( +3i)(8+i) ( 4
Regressziós vizsgálatok
 Regressziós vizsgálatok Regresszió (regression) Általános jelentése: visszaesés, hanyatlás, visszafelé mozgás, visszavezetés. Orvosi területen: visszafejlődés, involúció. A betegség tünetei, vagy maga
Regressziós vizsgálatok Regresszió (regression) Általános jelentése: visszaesés, hanyatlás, visszafelé mozgás, visszavezetés. Orvosi területen: visszafejlődés, involúció. A betegség tünetei, vagy maga
Lineáris regressziós modellek 1
 Lineáris regressziós modellek 1 Ispány Márton és Jeszenszky Péter 2016. szeptember 19. 1 Az ábrák C.M. Bishop: Pattern Recognition and Machine Learning c. könyvéből származnak. Tartalom Bevezető példák
Lineáris regressziós modellek 1 Ispány Márton és Jeszenszky Péter 2016. szeptember 19. 1 Az ábrák C.M. Bishop: Pattern Recognition and Machine Learning c. könyvéből származnak. Tartalom Bevezető példák
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
Egybevágósági transzformációk. A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá.
 Egybevágósági transzformációk A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá. Egybevágósági transzformációk azok a geometriai transzformációk, amelyeknél bármely
Egybevágósági transzformációk A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá. Egybevágósági transzformációk azok a geometriai transzformációk, amelyeknél bármely
Az egyenlőtlenség mindkét oldalát szorozzuk meg 4 16-al:
 Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Regresszió számítás. Tartalomjegyzék: GeoEasy V2.05+ Geodéziai Kommunikációs Program
 Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Tartalom. Nevezetes affin transzformációk. Valasek Gábor 2016/2017. tavaszi félév
 Tartalom Motiváció Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Transzformációk Transzformációk általában Nevezetes affin
Tartalom Motiváció Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Transzformációk Transzformációk általában Nevezetes affin
Fourier transzformáció
 a Matematika mérnököknek II. című tárgyhoz Fourier transzformáció Fourier transzformáció, heurisztika Tekintsük egy 2L szerint periodikus függvény Fourier sorát: f (x) = a 0 2 + ( ( nπ ) ( nπ )) a n cos
a Matematika mérnököknek II. című tárgyhoz Fourier transzformáció Fourier transzformáció, heurisztika Tekintsük egy 2L szerint periodikus függvény Fourier sorát: f (x) = a 0 2 + ( ( nπ ) ( nπ )) a n cos
1. Bázistranszformáció
 1. Bázistranszformáció Transzformáció mátrixa új bázisban A bázistranszformáció képlete (Freud, 5.8.1. Tétel) Legyenek b és d bázisok V -ben, ] v V és A Hom(V). Jelölje S = [[d 1 ] b,...,[d n ] b T n n
1. Bázistranszformáció Transzformáció mátrixa új bázisban A bázistranszformáció képlete (Freud, 5.8.1. Tétel) Legyenek b és d bázisok V -ben, ] v V és A Hom(V). Jelölje S = [[d 1 ] b,...,[d n ] b T n n
Lin.Alg.Zh.1 feladatok
 Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
A hiperbolikus síkgeometria Poincaré-féle körmodellje
 A hiperbolikus síkgeometria Poincaré-féle körmodellje Ha egy aiómarendszerre modellt adunk, az azt jelenti, hogy egy matematikai rendszerben interpretáljuk az aiómarendszer alapfogalmait és az aiómák a
A hiperbolikus síkgeometria Poincaré-féle körmodellje Ha egy aiómarendszerre modellt adunk, az azt jelenti, hogy egy matematikai rendszerben interpretáljuk az aiómarendszer alapfogalmait és az aiómák a
x = 1 = ı (imaginárius egység), illetve x 12 = 1 ± 1 4 2
, illetve x 12 = 1 ± 1 4 2") Komplex számok A valós számok és a számegyenes pontjai között kölcsönösen egyértelmű megfeleltetés létesíthető. A számfogalom a számegyenes pontjainak körében nem bővíthető tovább. A számfogalom bővítését
Komplex számok A valós számok és a számegyenes pontjai között kölcsönösen egyértelmű megfeleltetés létesíthető. A számfogalom a számegyenes pontjainak körében nem bővíthető tovább. A számfogalom bővítését
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Valasek Gábor Informatikai Kar. 2016/2017. tavaszi félév
 Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes
Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes
Automatikus irányzás digitális képek. feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA
 Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
Regresszió. Csorba János. Nagyméretű adathalmazok kezelése március 31.
 Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Csoportosítás. Térinformatikai műveletek, elemzések. Csoportosítás. Csoportosítás
 Csoportosítás Térinformatikai műveletek, elemzések Leíró (attribútum) adatokra vonatkozó kérdések, műveletek, elemzések, csoportosítások,... Térbeli (geometriai) adatokra vonatkozó kérdések, műveletek
Csoportosítás Térinformatikai műveletek, elemzések Leíró (attribútum) adatokra vonatkozó kérdések, műveletek, elemzések, csoportosítások,... Térbeli (geometriai) adatokra vonatkozó kérdések, műveletek
Közösség detektálás gráfokban
 Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Képfeldolgozó eljárások áttekintés. Orvosi képdiagnosztika
 Képfeldolgozó eljárások áttekintés Orvosi képdiagnosztika Tartalomjegyzék Képmanipulációs eljárások Képjavítás (kontraszt módosítás, intenzitásviszonyok módosításahisztogram módosítás, zajszűrés) Képelemzés
Képfeldolgozó eljárások áttekintés Orvosi képdiagnosztika Tartalomjegyzék Képmanipulációs eljárások Képjavítás (kontraszt módosítás, intenzitásviszonyok módosításahisztogram módosítás, zajszűrés) Képelemzés
Tartószerkezet-rekonstrukciós Szakmérnöki Képzés
 1_5. Bevezetés Végeselem-módszer Végeselem-módszer 1. A geometriai tartomány (szerkezet) felosztása (véges)elemekre.. Lokális koordináta-rendszer felvétele, kapcsolat a lokális és globális koordinátarendszerek
1_5. Bevezetés Végeselem-módszer Végeselem-módszer 1. A geometriai tartomány (szerkezet) felosztása (véges)elemekre.. Lokális koordináta-rendszer felvétele, kapcsolat a lokális és globális koordinátarendszerek
Geometria II gyakorlatok
 Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2012. május 8. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2012. május 8. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Kvadratikus alakok és euklideszi terek (előadásvázlat, október 5.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Kvadratikus alakok és euklideszi terek (előadásvázlat, 0. október 5.) Maróti Miklós, Kátai-Urbán Kamilla Az előadáshoz ajánlott jegyzet: Szabó László: Bevezetés a lineáris algebrába, Polygon Kiadó, Szeged,
Kvadratikus alakok és euklideszi terek (előadásvázlat, 0. október 5.) Maróti Miklós, Kátai-Urbán Kamilla Az előadáshoz ajánlott jegyzet: Szabó László: Bevezetés a lineáris algebrába, Polygon Kiadó, Szeged,
GÖRBÉK ÉS FELÜLETEK ILLESZTÉSE KÉNYSZEREKKEL II.
 GÖRBÉK ÉS FELÜLETEK ILLESZTÉSE KÉNYSZEREKKEL II. Érdekességek a geometriai modellezésben Kovács István MIRŐL LESZ SZÓ? Kényszerek automatikus felismerése 1. Lokális kényszerek (merőlegesség, párhuzamosság,
GÖRBÉK ÉS FELÜLETEK ILLESZTÉSE KÉNYSZEREKKEL II. Érdekességek a geometriai modellezésben Kovács István MIRŐL LESZ SZÓ? Kényszerek automatikus felismerése 1. Lokális kényszerek (merőlegesség, párhuzamosság,
A fontosabb definíciók
 A legfontosabb definíciókat jelöli. A fontosabb definíciók [Descartes szorzat] Az A és B halmazok Descartes szorzatán az A és B elemeiből képezett összes (a, b) a A, b B rendezett párok halmazát értjük,
A legfontosabb definíciókat jelöli. A fontosabb definíciók [Descartes szorzat] Az A és B halmazok Descartes szorzatán az A és B elemeiből képezett összes (a, b) a A, b B rendezett párok halmazát értjük,
3D Számítógépes Geometria II.
 3D Számítógépes Geometria II. 1. Bevezetés http://cg.iit.bme.hu/portal/3dgeo2 https://www.vik.bme.hu/kepzes/targyak/viiiav16 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki és Informatikai Kar Irányítástechnika
3D Számítógépes Geometria II. 1. Bevezetés http://cg.iit.bme.hu/portal/3dgeo2 https://www.vik.bme.hu/kepzes/targyak/viiiav16 Dr. Várady Tamás, Dr. Salvi Péter BME, Villamosmérnöki és Informatikai Kar Irányítástechnika
Alkalmazott algebra. Lineáris leképezések EIC. Wettl Ferenc ALGEBRA TANSZÉK BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK )
") B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Alkalmazott algebra BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK ) Lineáris leképezések
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Alkalmazott algebra BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK ) Lineáris leképezések
Wavelet transzformáció
 1 Wavelet transzformáció Más felbontás: Walsh, Haar, wavelet alapok! Eddig: amplitúdó vagy frekvencia leírás: Pl. egy rövid, Dirac-delta jellegű impulzus Fourier-transzformált: nagyon sok, kb. ugyanolyan
1 Wavelet transzformáció Más felbontás: Walsh, Haar, wavelet alapok! Eddig: amplitúdó vagy frekvencia leírás: Pl. egy rövid, Dirac-delta jellegű impulzus Fourier-transzformált: nagyon sok, kb. ugyanolyan
ACM Snake. Orvosi képdiagnosztika 11. előadás első fele
 ACM Snake Orvosi képdiagnosztika 11. előadás első fele ACM Snake (ismétlés) A szegmentáló kontúr egy paraméteres görbe: x Zs s X s, Y s,, s A szegmentáció energia funkcionál minimalizálása: E x Eint x
ACM Snake Orvosi képdiagnosztika 11. előadás első fele ACM Snake (ismétlés) A szegmentáló kontúr egy paraméteres görbe: x Zs s X s, Y s,, s A szegmentáció energia funkcionál minimalizálása: E x Eint x
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK KÖZÉPSZINT Függvények
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK KÖZÉPSZINT Függvények A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett feladatrészek megoldásához!
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK KÖZÉPSZINT Függvények A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett feladatrészek megoldásához!
x 2 e x dx c) (3x 2 2x)e 2x dx x sin x dx f) x cosxdx (1 x 2 )(sin 2x 2 cos 3x) dx e 2x cos x dx k) e x sin x cosxdx x ln x dx n) (2x + 1) ln 2 x dx
 (3x 2 2x)e 2x dx x sin x dx f) x cosxdx (1 x 2 )(sin 2x 2 cos 3x) dx e 2x cos x dx k) e x sin x cosxdx x ln x dx n) (2x + 1) ln 2 x dx") Integrálszámítás II. Parciális integrálás. g) i) l) o) e ( + )(e e ) cos h) e sin j) (sin 3 cos) m) arctg p) arcsin e (3 )e sin f) cos ( )(sin cos 3) e cos k) e sin cos ln n) ( + ) ln. e 3 e cos 3 3 cos
Integrálszámítás II. Parciális integrálás. g) i) l) o) e ( + )(e e ) cos h) e sin j) (sin 3 cos) m) arctg p) arcsin e (3 )e sin f) cos ( )(sin cos 3) e cos k) e sin cos ln n) ( + ) ln. e 3 e cos 3 3 cos
5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11
![5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11](/thumbs/93/113569557.jpg "5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11") Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek
 16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek EGYBEVÁGÓSÁGI TRANSZFORMÁCIÓK Geometriai transzformáció Def:Olyan speciális függvény, melynek értelmezési
16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek EGYBEVÁGÓSÁGI TRANSZFORMÁCIÓK Geometriai transzformáció Def:Olyan speciális függvény, melynek értelmezési
Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán
 Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán MTA KFKI Részecske és Magfizikai Intézet, Biofizikai osztály Az egy adatsorra (idősorra) is alkalmazható módszerek Példa: Az epileptikus
Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán MTA KFKI Részecske és Magfizikai Intézet, Biofizikai osztály Az egy adatsorra (idősorra) is alkalmazható módszerek Példa: Az epileptikus
b) Ábrázolja ugyanabban a koordinátarendszerben a g függvényt! (2 pont) c) Oldja meg az ( x ) 2
 Ábrázolja ugyanabban a koordinátarendszerben a g függvényt! (2 pont) c) Oldja meg az ( x ) 2") 1) Az ábrán egy ; intervallumon értelmezett függvény grafikonja látható. Válassza ki a felsoroltakból a függvény hozzárendelési szabályát! a) b) c) ( ) ) Határozza meg az 1. feladatban megadott, ; intervallumon
1) Az ábrán egy ; intervallumon értelmezett függvény grafikonja látható. Válassza ki a felsoroltakból a függvény hozzárendelési szabályát! a) b) c) ( ) ) Határozza meg az 1. feladatban megadott, ; intervallumon
Saj at ert ek-probl em ak febru ar 26.
 Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Szinguláris értékek. Wettl Ferenc április 3. Wettl Ferenc Szinguláris értékek április 3. 1 / 28
 Szinguláris értékek Wettl Ferenc 2015. április 3. Wettl Ferenc Szinguláris értékek 2015. április 3. 1 / 28 Tartalom 1 Szinguláris érték 2 Alkalmazások 3 Norma 4 Mátrixnorma Wettl Ferenc Szinguláris értékek
Szinguláris értékek Wettl Ferenc 2015. április 3. Wettl Ferenc Szinguláris értékek 2015. április 3. 1 / 28 Tartalom 1 Szinguláris érték 2 Alkalmazások 3 Norma 4 Mátrixnorma Wettl Ferenc Szinguláris értékek
cos 2 (2x) 1 dx c) sin(2x)dx c) cos(3x)dx π 4 cos(2x) dx c) 5sin 2 (x)cos(x)dx x3 5 x 4 +11dx arctg 11 (2x) 4x 2 +1 π 4
 1 dx c) sin(2x)dx c) cos(3x)dx π 4 cos(2x) dx c) 5sin 2 (x)cos(x)dx x3 5 x 4 +11dx arctg 11 (2x) 4x 2 +1 π 4") Integrálszámítás I. Végezze el a következő integrálásokat:. α, haα sin() cos() e f) a sin h) () cos ().. 5 4 ( ) e + 4 sin h) (+) sin() sin() cos() + f) 5 i) cos ( +) 7 4. 4 (+) 6 4 cos() 5 +7 5. ( ) sin()cos
Integrálszámítás I. Végezze el a következő integrálásokat:. α, haα sin() cos() e f) a sin h) () cos ().. 5 4 ( ) e + 4 sin h) (+) sin() sin() cos() + f) 5 i) cos ( +) 7 4. 4 (+) 6 4 cos() 5 +7 5. ( ) sin()cos
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 3 III. VÉLETLEN VEKTOROK 1. A KÉTDIMENZIÓs VÉLETLEN VEKTOR Definíció: Az leképezést (kétdimenziós) véletlen vektornak nevezzük, ha Definíció:
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 3 III. VÉLETLEN VEKTOROK 1. A KÉTDIMENZIÓs VÉLETLEN VEKTOR Definíció: Az leképezést (kétdimenziós) véletlen vektornak nevezzük, ha Definíció:
A Föld alakja TRANSZFORMÁCIÓ. Magyarországon még használatban lévő vetületi rendszerek. Miért kell transzformálni? Főbb transzformációs lehetőségek
 TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
Egybevágósági transzformációk
 Egybevágósági transzformációk Párhuzamos eltolás Geometriai transzformációk Egybevágósági transzformációk (9. osztály) Helybenhagyás Tengelyes tükrözés Középpontos tükrözés Pont körüli forgatás Párhuzamos
Egybevágósági transzformációk Párhuzamos eltolás Geometriai transzformációk Egybevágósági transzformációk (9. osztály) Helybenhagyás Tengelyes tükrözés Középpontos tükrözés Pont körüli forgatás Párhuzamos
Diszkrét matematika 2 (C) vizsgaanyag, 2012 tavasz
 vizsgaanyag, 2012 tavasz") Diszkrét matematika 2 (C) vizsgaanyag, 2012 tavasz A vizsga menete: a vizsga írásbeli és szóbeli részből áll. Az írásbeli beugrón az alábbi kérdések közül szerepel összesen 12 darab, mindegyik egy pontot
Diszkrét matematika 2 (C) vizsgaanyag, 2012 tavasz A vizsga menete: a vizsga írásbeli és szóbeli részből áll. Az írásbeli beugrón az alábbi kérdések közül szerepel összesen 12 darab, mindegyik egy pontot
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
1. Az euklideszi terek geometriája
 1. Az euklideszi terek geometriája Bázishoz tartozó skaláris szorzat Emékeztető Az R n vektortérbeli v = λ 2... és w = λ 1 λ n µ 1 µ 2... µ n λ 1 µ 1 +λ 2 µ 2 +...+λ n µ n. Jele v,w. v,w = v T u, azaz
1. Az euklideszi terek geometriája Bázishoz tartozó skaláris szorzat Emékeztető Az R n vektortérbeli v = λ 2... és w = λ 1 λ n µ 1 µ 2... µ n λ 1 µ 1 +λ 2 µ 2 +...+λ n µ n. Jele v,w. v,w = v T u, azaz
Algoritmusok bonyolultsága
 Algoritmusok bonyolultsága 5. előadás http://www.ms.sapientia.ro/~kasa/komplex.htm 1 / 27 Gazdaságos faváz Kruskal-algoritmus Joseph Kruskal (1928 2010) Legyen V = {v 1, v 2,..., v n }, E = {e 1, e 2,...,
Algoritmusok bonyolultsága 5. előadás http://www.ms.sapientia.ro/~kasa/komplex.htm 1 / 27 Gazdaságos faváz Kruskal-algoritmus Joseph Kruskal (1928 2010) Legyen V = {v 1, v 2,..., v n }, E = {e 1, e 2,...,
A gyakorlat célja a fehér és a színes zaj bemutatása.
 A gyakorlat célja a fehér és a színes zaj bemutatása. 1.@. FFT begyakorlása n = [:9]; % Harminc minta x = cos(*pi*n/1); % 1 mintát veszünk periodusonként N1 = 64; % Három módon számoljuk az FFT-t N = 18;
A gyakorlat célja a fehér és a színes zaj bemutatása. 1.@. FFT begyakorlása n = [:9]; % Harminc minta x = cos(*pi*n/1); % 1 mintát veszünk periodusonként N1 = 64; % Három módon számoljuk az FFT-t N = 18;
Érettségi feladatok Koordinátageometria_rendszerezve / 5
 Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
Numerikus módszerek beugró kérdések
 1. Definiálja a gépi számok halmazát (a tanult modellnek megfelelően)! Adja meg a normalizált lebegőpontos szám alakját. (4 pont) Az alakú számot normalizált lebegőpontos számnak nevezik, ha Ahol,,,. Jelöl:
1. Definiálja a gépi számok halmazát (a tanult modellnek megfelelően)! Adja meg a normalizált lebegőpontos szám alakját. (4 pont) Az alakú számot normalizált lebegőpontos számnak nevezik, ha Ahol,,,. Jelöl: