Valasek Gábor Informatikai Kar. 2016/2017. tavaszi félév
|
|
|
- Nándor Lukács
- 6 évvel ezelőtt
- Látták:
Átírás
1 Számítógépes Grafika Valasek Gábor Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév
2 Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
3 Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
4 Motiváció A virtuális világunkban található összetett alakzatokat (ház, fa stb.) több, kisebb építőelemből is összerakhatjuk (ajtó, ablak, levelek...)
5 Motiváció A virtuális világunkban található összetett alakzatokat (ház, fa stb.) több, kisebb építőelemből is összerakhatjuk (ajtó, ablak, levelek...) az alakzat részeit el kell helyeznünk a térben
6 Motiváció A virtuális világunkban található összetett alakzatokat (ház, fa stb.) több, kisebb építőelemből is összerakhatjuk (ajtó, ablak, levelek...) az alakzat részeit el kell helyeznünk a térben Az alakzatokat el kell helyeznünk a világban, mozgatnunk kell őket stb.
7 Motiváció A virtuális világunkban található összetett alakzatokat (ház, fa stb.) több, kisebb építőelemből is összerakhatjuk (ajtó, ablak, levelek...) az alakzat részeit el kell helyeznünk a térben Az alakzatokat el kell helyeznünk a világban, mozgatnunk kell őket stb. A virtuális világunkból egy kétdimenziós képet is elő kell álĺıtanunk
8 Motiváció A virtuális világunkban található összetett alakzatokat (ház, fa stb.) több, kisebb építőelemből is összerakhatjuk (ajtó, ablak, levelek...) az alakzat részeit el kell helyeznünk a térben Az alakzatokat el kell helyeznünk a világban, mozgatnunk kell őket stb. A virtuális világunkból egy kétdimenziós képet is elő kell álĺıtanunk A fenti lépésekhez mind szükségünk lesz geometriai transzformációkra, amelyekkel az alakzatainkat megváltoztathatjuk
9 Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
10 Transzformációk általában Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
11 Transzformációk általában Transzformációk Az elvárásaink
12 Transzformációk általában Transzformációk Az elvárásaink minden pontot lehessen transzformálni
13 Transzformációk általában Transzformációk Az elvárásaink minden pontot lehessen transzformálni pont képe legyen pont, egyenes képe egyenes, sík képe sík
14 Transzformációk általában Transzformációk Az elvárásaink minden pontot lehessen transzformálni pont képe legyen pont, egyenes képe egyenes, sík képe sík illeszkedést tartsa
15 Transzformációk általában Transzformációk Az elvárásaink minden pontot lehessen transzformálni pont képe legyen pont, egyenes képe egyenes, sík képe sík illeszkedést tartsa legyen egyértelmű és egyértelműen megfordítható
16 Transzformációk általában Megjegyzés A pontjainkat a számítógépen valamilyen koordináta-rendszerben tároljuk
17 Transzformációk általában Megjegyzés A pontjainkat a számítógépen valamilyen koordináta-rendszerben tároljuk a transzformációk ezeken a koordinátákon végzett műveletek
18 Transzformációk általában Megjegyzés A pontjainkat a számítógépen valamilyen koordináta-rendszerben tároljuk a transzformációk ezeken a koordinátákon végzett műveletek A továbbiakban azonosítsuk az Euklideszi tér, E 3 (vagy sík, E 2 ) elemeit a R 3 (vagy R 2 ) valós vektorterünk elemeivel
19 Transzformációk általában Megjegyzés A pontjainkat a számítógépen valamilyen koordináta-rendszerben tároljuk a transzformációk ezeken a koordinátákon végzett műveletek A továbbiakban azonosítsuk az Euklideszi tér, E 3 (vagy sík, E 2 ) elemeit a R 3 (vagy R 2 ) valós vektorterünk elemeivel Ehhez rögzítünk egy O E 3 pontot, origót, és minden q E 3 ponthoz a p = q O vektort rendeljük
20 Transzformációk általában Lineáris leképezések Kiemelt jelentősége lesz a lineáris leképezéseknek, azaz azon φ leképezéseknek, amelyekre teljesül, hogy a, b R 3 és λ R esetén
21 Transzformációk általában Lineáris leképezések Kiemelt jelentősége lesz a lineáris leképezéseknek, azaz azon φ leképezéseknek, amelyekre teljesül, hogy a, b R 3 és λ R esetén φ(a + b) = φ(a) + φ(b) (additív)
22 Transzformációk általában Lineáris leképezések Kiemelt jelentősége lesz a lineáris leképezéseknek, azaz azon φ leképezéseknek, amelyekre teljesül, hogy a, b R 3 és λ R esetén φ(a + b) = φ(a) + φ(b) (additív) φ(λa) = λφ(a) (homogén)
23 Transzformációk általában Lineáris leképezések Kiemelt jelentősége lesz a lineáris leképezéseknek, azaz azon φ leképezéseknek, amelyekre teljesül, hogy a, b R 3 és λ R esetén φ(a + b) = φ(a) + φ(b) (additív) φ(λa) = λφ(a) (homogén) Emlékeztető: az f : R n R m lineáris leképezéseket egy A R m n mátrixszal fel tudjuk írni; ekkor f (x) = Ax, x R n.
24 Transzformációk általában Projektív és affin transzformációk - definíciók Az ideális síkkal kibővített euklideszi tér önmagára való, kölcsönösen egyértelmű, pont-, egyenes-, sík-, és illeszkedést tartó leképezéseit kollineációknak, vagy projektív transzformációknak nevezzük.
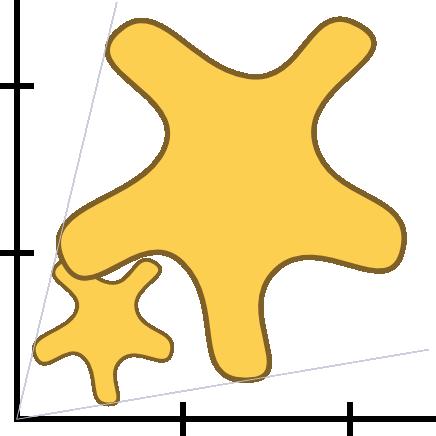
25 Transzformációk általában Projektív és affin transzformációk - definíciók Az ideális síkkal kibővített euklideszi tér önmagára való, kölcsönösen egyértelmű, pont-, egyenes-, sík-, és illeszkedést tartó leképezéseit kollineációknak, vagy projektív transzformációknak nevezzük. Affin transzformációk a projektív transzformációknak az az alcsoportja, amelyek a (kibővített) tér közönséges, euklideszi részét önmagára képezik le, és az ideális síkot is önmagára képezi le.
26 Transzformációk általában Tulajdonságok A projektív és affin transzformációk algebrai csoportot alkotnak a konkatenáció (transzformációk kompozíciója) műveletével
27 Transzformációk általában Tulajdonságok A projektív és affin transzformációk algebrai csoportot alkotnak a konkatenáció (transzformációk kompozíciója) műveletével ez mit jelent?
28 Transzformációk általában Tulajdonságok A projektív és affin transzformációk algebrai csoportot alkotnak a konkatenáció (transzformációk kompozíciója) műveletével ez mit jelent? a konkatenáció asszociatív (a műveletek csoportosíthatók)
29 Transzformációk általában Tulajdonságok A projektív és affin transzformációk algebrai csoportot alkotnak a konkatenáció (transzformációk kompozíciója) műveletével ez mit jelent? a konkatenáció asszociatív (a műveletek csoportosíthatók) létezik egységelem (egységtranszformáció)
30 Transzformációk általában Tulajdonságok A projektív és affin transzformációk algebrai csoportot alkotnak a konkatenáció (transzformációk kompozíciója) műveletével ez mit jelent? a konkatenáció asszociatív (a műveletek csoportosíthatók) létezik egységelem (egységtranszformáció) a dimenziótartó transzformációknak van inverze (vissza lehet csinálni)
31 Transzformációk általában Tulajdonságok A projektív és affin transzformációk algebrai csoportot alkotnak a konkatenáció (transzformációk kompozíciója) műveletével ez mit jelent? a konkatenáció asszociatív (a műveletek csoportosíthatók) létezik egységelem (egységtranszformáció) a dimenziótartó transzformációknak van inverze (vissza lehet csinálni) Figyeljünk: a csoport nem kommutatív!
32 Transzformációk általában Affin transzformációk tulajdonságai Az affin transzformációk megadhatóak egy lineáris transzformáció és egy eltolás segítségével, azaz ha ϕ : R 3 R 3 affin transzformáció, akkor létezik A R 3 3 és b R 3, hogy x R 3 -ra ϕ(x) = Ax + b
33 Transzformációk általában Affin transzformációk tulajdonságai Az affin transzformációk megadhatóak egy lineáris transzformáció és egy eltolás segítségével, azaz ha ϕ : R 3 R 3 affin transzformáció, akkor létezik A R 3 3 és b R 3, hogy x R 3 -ra ϕ(x) = Ax + b A mátrix-vektor szorzást ilyen sorrendben végezzük el, azaz: a mátrix a bal-, a vektor a jobboldalon áll
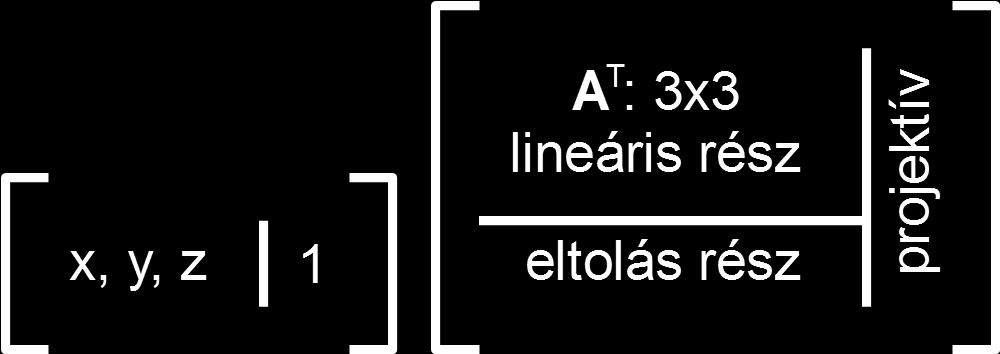
34 Transzformációk általában Affin transzformációk tulajdonságai A ϕ(x) = Ax + b megadás homogén koordináták segítségével egyetlen mátrix-vektor szorzással is feĺırható:
35 Transzformációk általában Affin transzformációk tulajdonságai A ϕ(x) = Ax + b megadás homogén koordináták segítségével egyetlen mátrix-vektor szorzással is feĺırható: [ ] A b R 4 4 [0, 0, 0] 1
36 Transzformációk általában Affin transzformációk tulajdonságai A ϕ(x) = Ax + b megadás homogén koordináták segítségével egyetlen mátrix-vektor szorzással is feĺırható: Ugyanis ekkor [ ] A b [0, 0, 0] 1 [ ] A b R 4 4 [0, 0, 0] 1 [ ] x = 1 [ ] A x + b 1 = 0 x [ ] A x + b 1
37 Transzformációk általában Affin transzformációk tulajdonságai Az affin transzformációk a baricentrikus koordinátákat érvényben hagyják (más szóval a baricentrikus koordináták affin invariánsak)
38 Transzformációk általában Affin transzformációk tulajdonságai Az affin transzformációk a baricentrikus koordinátákat érvényben hagyják (más szóval a baricentrikus koordináták affin invariánsak) Biz.: legyenek a tetszőleges x baricentrikus koordinátái x i -kre vonatkoztatva α i, ekkor ϕ(x) = ϕ( n i=0 α ix i )
39 Transzformációk általában Affin transzformációk tulajdonságai Az affin transzformációk a baricentrikus koordinátákat érvényben hagyják (más szóval a baricentrikus koordináták affin invariánsak) Biz.: legyenek a tetszőleges x baricentrikus koordinátái x i -kre vonatkoztatva α i, ekkor ϕ(x) = ϕ( n i=0 α ix i ) = (A n i=0 α ix i ) + b
40 Transzformációk általában Affin transzformációk tulajdonságai Az affin transzformációk a baricentrikus koordinátákat érvényben hagyják (más szóval a baricentrikus koordináták affin invariánsak) Biz.: legyenek a tetszőleges x baricentrikus koordinátái x i -kre vonatkoztatva α i, ekkor ϕ(x) = ϕ( n i=0 α ix i ) = (A n = A n i=0 α ix i ) + b i=0 α ix i + n i=0 α ib
41 Transzformációk általában Affin transzformációk tulajdonságai Az affin transzformációk a baricentrikus koordinátákat érvényben hagyják (más szóval a baricentrikus koordináták affin invariánsak) Biz.: legyenek a tetszőleges x baricentrikus koordinátái x i -kre vonatkoztatva α i, ekkor ϕ(x) = ϕ( n i=0 α ix i ) = (A n = A n i=0 α ix i ) + b i=0 α ix i + n i=0 α ib = n i=0 α i(ax i + b) = n i=0 α iϕ(x i )
42 Transzformációk általában Affin transzformációk megadása E n -ben egy affin transzformációt egyértelműen meghatároz n + 1 általános állású pont és annak képe
43 Transzformációk általában Affin transzformációk megadása E n -ben egy affin transzformációt egyértelműen meghatároz n + 1 általános állású pont és annak képe Azaz, például síkban ha adott három általános állású pont és ezek képei, rendre x i p i = y i, i = 0, 1, 2 1 x i q i = y i, i = 0, 1, 2 1 akkor p i -ket q i -kbe átvivő R R 3 3 transzformációra R [p 0, p 1, p 2 ] = [q 0, q 1, q 2 ] R = [q 0, q 1, q 2 ] [p 0, p 1, p 2 ] 1
44 Transzformációk általában Projektív transzformációk megadása E n -ben egy projektív transzformációt egyértelműen meghatároz n + 2 általános állású pont és annak képe
45 Transzformációk általában Projektív transzformációk megadása E n -ben egy projektív transzformációt egyértelműen meghatároz n + 2 általános állású pont és annak képe Tehát síkban 4: legyen P R 3 3 és α 0, α 1, α 2, α 3 R, ekkor megoldandó P-re P [p 0, p 1, p 2, p 3 ] = [α 0 q 0, α 1 q 1, α 2 q 2, α 3 q 3 ]
46 Transzformációk általában Transzformációk osztályozása
47 Transzformációk általában Transzformációk osztályozása
48 Transzformációk általában Transzformációk osztályozása
49 Transzformációk általában Transzformációk osztályozása
50 Transzformációk általában Transzformációk osztályozása
51 Transzformációk általában Transzformációk osztályozása
52 Transzformációk általában Transzformációk osztályozása
53 Transzformációk általában Transzformációk osztályozása
54 Transzformációk általában Transzformációk osztályozása
55 Transzformációk általában Transzformációk osztályozása
56 Transzformációk általában Transzformációk osztályozása
57 Transzformációk általában Transzformációk osztályozása
58 Transzformációk általában Transzformációk osztályozása
59 Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
60 Eltolás Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
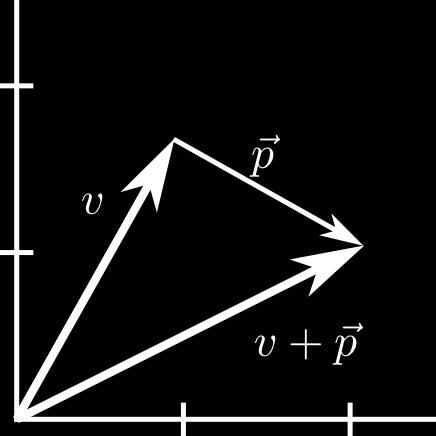
61 Eltolás Eltolás
62 Eltolás Eltolás Minden pontot egy adott d vektorral eltolunk: x = x + d
63 Eltolás Eltolás Minden pontot egy adott d vektorral eltolunk: x = x + d Általában T(d x, d y, d z )-vel jelöljük
64 Eltolás Eltolás Minden pontot egy adott d vektorral eltolunk: x = x + d Általában T(d x, d y, d z )-vel jelöljük Mátrix alakhoz homogén koordináták kellenek, w = 1 választással és akkor a következő 4 4-es mátrixszal adható meg: d x d y d z
65 Eltolás Eltolás Hiszen ha homogén koordinátáit használjuk az x pontnak, akkor d x x 1 x + 0 y + 0 z + 1 d x d y d z y z = 0 x + 1 y + 0 z + 1 d y 0 x + 0 y + 1 z + 1 d z
66 Eltolás Tulajdonságok Az affin transzformációk egy kommutatív részcsoportját alkotják
67 Eltolás Tulajdonságok Az affin transzformációk egy kommutatív részcsoportját alkotják A T(a, b, c) inverze T 1 (a, b, c) = T( a, b, c)
68 Forgatás Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
69 Forgatás Forgatás Négyjegyű függvénytáblázatból: Forgatás XY síkban (gyakorlatilag a Z tegely körül) θ szöggel: x = x cos θ y sin θ y = x sin θ + y cos θ.
70 Forgatás Forgatás Négyjegyű függvénytáblázatból: Forgatás XY síkban (gyakorlatilag a Z tegely körül) θ szöggel: x = x cos θ y sin θ y = x sin θ + y cos θ. Mátrix alakban: [ ] x = x y [ cos θ sin θ ] + y [ ] sin θ = cos θ [ cos θ sin θ sin θ cos θ ] [ x y ]
71 Forgatás Forgatás Négyjegyű függvénytáblázatból: Forgatás XY síkban (gyakorlatilag a Z tegely körül) θ szöggel: x = x cos θ y sin θ y = x sin θ + y cos θ. Mátrix alakban: [ ] x = x y [ cos θ sin θ ] + y [ ] sin θ = cos θ [ cos θ sin θ sin θ cos θ ] [ x y ] Hasonlóan kaphatjuk XZ és YZ síkokon is.
72 Forgatás Forgatás mátrixok Z tegely mentén Y tegely mentén X tegely mentén c s 0 0 c 0 s R Z (θ) = s c R, Y (θ) = s 0 c 0, R X (θ) = 0 c s 0 0 s c ahol c = cos θ és s = sin θ.
73 Forgatás Tulajdonságok Az azonos tengely körüli elforgatások az affin transzformációk egy kommutatív részcsoportját alkotják
74 Forgatás Tulajdonságok Az azonos tengely körüli elforgatások az affin transzformációk egy kommutatív részcsoportját alkotják A térbeli forgatás mátrixához elég egy 3 3 mátrix (lineáris transzformáció)
75 Forgatás Tulajdonságok Az azonos tengely körüli elforgatások az affin transzformációk egy kommutatív részcsoportját alkotják A térbeli forgatás mátrixához elég egy 3 3 mátrix (lineáris transzformáció) Az eltolás és forgatás sorrendje nem cserélhető!
76 Forgatás Tulajdonságok Az azonos tengely körüli elforgatások az affin transzformációk egy kommutatív részcsoportját alkotják A térbeli forgatás mátrixához elég egy 3 3 mátrix (lineáris transzformáció) Az eltolás és forgatás sorrendje nem cserélhető! A forgatás inverze az eredeti forgatás nagyságával megegyező, de ellentétes irányú elforgatás
77 Forgatás Tetszőleges forgatás Tetszőleges orientáció előálĺıtható a három forgatás egymás utáni használatával. R(α, β, γ) = cos α sin α 0 cos β 0 sin β sin α cos α cos γ sin γ sin β 0 cos β 0 sin γ cos γ
78 Forgatás Tetszőleges tengely körüli forgatás Az eddigieket felhasználva: toljuk el a forgatási tengelyt az origóba (T)
79 Forgatás Tetszőleges tengely körüli forgatás Az eddigieket felhasználva: toljuk el a forgatási tengelyt az origóba (T) forgassuk be az egyik tengely körül a másik kettő síkjába (például R Z -vel)
80 Forgatás Tetszőleges tengely körüli forgatás Az eddigieket felhasználva: toljuk el a forgatási tengelyt az origóba (T) forgassuk be az egyik tengely körül a másik kettő síkjába (például R Z -vel) ebben a síkban a két tengely közül az egyikkel forgassuk be a másik tengelybe (például R Y )
81 Forgatás Tetszőleges tengely körüli forgatás Az eddigieket felhasználva: toljuk el a forgatási tengelyt az origóba (T) forgassuk be az egyik tengely körül a másik kettő síkjába (például R Z -vel) ebben a síkban a két tengely közül az egyikkel forgassuk be a másik tengelybe (például R Y ) végezzük el az elforgatást (például R X -szel, de: ez az új (X ) tengely körül forgat!)
82 Forgatás Tetszőleges tengely körüli forgatás Az eddigieket felhasználva: toljuk el a forgatási tengelyt az origóba (T) forgassuk be az egyik tengely körül a másik kettő síkjába (például R Z -vel) ebben a síkban a két tengely közül az egyikkel forgassuk be a másik tengelybe (például R Y ) végezzük el az elforgatást (például R X -szel, de: ez az új (X ) tengely körül forgat!) alkalmazzuk az eddigi transzformációk inverzeit
83 Forgatás Tetszőleges tengely körüli forgatás Az eddigieket felhasználva: toljuk el a forgatási tengelyt az origóba (T) forgassuk be az egyik tengely körül a másik kettő síkjába (például R Z -vel) ebben a síkban a két tengely közül az egyikkel forgassuk be a másik tengelybe (például R Y ) végezzük el az elforgatást (például R X -szel, de: ez az új (X ) tengely körül forgat!) alkalmazzuk az eddigi transzformációk inverzeit Azaz például Mx = (T 1 R 1 Z R 1 Y R X R Y R Z T)x
84 Forgatás Tetszőleges tengely körüli forgatás - Rodrigues formula Tetszőleges tengely közüli forgatás megadható egy z egységvektorral, ami a forgatás tengelyét adja, és egy θ szöggel. Ezt írja le a Rodrigues formula, aminek felhasználásával: v = Rodrigues(θ, z)v
85 Forgatás Yaw, pitch, roll Egy objektum függőleges- (yaw), kereszt- (pitch) és hossztengelye (roll) menti elfordulásait egyszerre adjuk meg.
86 Forgatás Yaw, pitch, roll Egy objektum függőleges- (yaw), kereszt- (pitch) és hossztengelye (roll) menti elfordulásait egyszerre adjuk meg. Replüléstanban és robotikában előszeretettel használt megadási mód.
87 Forgatás Yaw, pitch, roll Egy objektum függőleges- (yaw), kereszt- (pitch) és hossztengelye (roll) menti elfordulásait egyszerre adjuk meg. Replüléstanban és robotikában előszeretettel használt megadási mód. Gyakorlatilag megegyezik azzal, mintha három közönséges tengely menti forgatást használnánk.
88 Forgatás Yaw, pitch, roll Egy objektum függőleges- (yaw), kereszt- (pitch) és hossztengelye (roll) menti elfordulásait egyszerre adjuk meg. Replüléstanban és robotikában előszeretettel használt megadási mód. Gyakorlatilag megegyezik azzal, mintha három közönséges tengely menti forgatást használnánk. Csak akkor működik helyesen, ha az objetum tengelyei egybe esnek a koordináta rendszer tengelyeivel.
89 Forgatás Yaw, pitch, roll Egy objektum függőleges- (yaw), kereszt- (pitch) és hossztengelye (roll) menti elfordulásait egyszerre adjuk meg. Replüléstanban és robotikában előszeretettel használt megadási mód. Gyakorlatilag megegyezik azzal, mintha három közönséges tengely menti forgatást használnánk. Csak akkor működik helyesen, ha az objetum tengelyei egybe esnek a koordináta rendszer tengelyeivel. Legtöbb API támogatja.
90 Forgatás Mozgás-transzformációk Az eltolások és tengely körüli elforgatás mozgás-transzformációk
91 Forgatás Mozgás-transzformációk Az eltolások és tengely körüli elforgatás mozgás-transzformációk A tárgyak alakját és méretét nem változtatják
92 Méretezés Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés

93 Méretezés Méretezés
94 Méretezés Méretezés Az x, y, z tengelyek mentén széthúzzuk, vagy összenyomjuk az alakzatot, azaz más léptéket választunk - egymástól függetlenül is akár
95 Méretezés Méretezés Az x, y, z tengelyek mentén széthúzzuk, vagy összenyomjuk az alakzatot, azaz más léptéket választunk - egymástól függetlenül is akár Mátrix alakban: S(s x, s y, s z ) = s x s y s z
96 Méretezés Speciális eset: tükrözés Ha s x, s y, s z valamelyike negatív
97 Méretezés Speciális eset: tükrözés Ha s x, s y, s z valamelyike negatív ha egy negatív: tükrözés az irányra merőleges síkra
98 Méretezés Speciális eset: tükrözés Ha s x, s y, s z valamelyike negatív ha egy negatív: tükrözés az irányra merőleges síkra ha kettő negatív: tükrözés egy tengelyre
99 Méretezés Speciális eset: tükrözés Ha s x, s y, s z valamelyike negatív ha egy negatív: tükrözés az irányra merőleges síkra ha kettő negatív: tükrözés egy tengelyre ha mindhárom negatív: középpontos tükrözés
100 Méretezés Speciális eset: tükrözés Ha s x, s y, s z valamelyike negatív ha egy negatív: tükrözés az irányra merőleges síkra ha kettő negatív: tükrözés egy tengelyre ha mindhárom negatív: középpontos tükrözés Figyeljünk: ha páratlan számú negatív együttható van, akkor a sodrásirány is megváltozik!
101 Méretezés Sodrásirány?
102 Méretezés Sodrásirány? Az i, j, k bázisvektorokat felhasználva, ha ϕ : R 3 R 3 lineáris transzformáció, akkor ϕ(p) = ϕ(xi + yj + zk) = xϕ(i) + yϕ(j) + zϕ(k)
103 Méretezés Sodrásirány? Az i, j, k bázisvektorokat felhasználva, ha ϕ : R 3 R 3 lineáris transzformáció, akkor ϕ(p) = ϕ(xi + yj + zk) = xϕ(i) + yϕ(j) + zϕ(k) ha egy transzformáció mátrixának determinánsa negatív, akkor a sodrásirány (a tárgyak térbeli irányítása) megváltozik
104 Méretezés Speciális eset: vetítés Ha s x, s y, s z valamelyike nulla
105 Méretezés Speciális eset: vetítés Ha s x, s y, s z valamelyike nulla ha egy nulla: az irányra merőleges síkra vetítünk
106 Méretezés Speciális eset: vetítés Ha s x, s y, s z valamelyike nulla ha egy nulla: az irányra merőleges síkra vetítünk ha kettő nulla: egy tengelyre vetítünk
107 Méretezés Speciális eset: vetítés Ha s x, s y, s z valamelyike nulla ha egy nulla: az irányra merőleges síkra vetítünk ha kettő nulla: egy tengelyre vetítünk ha mindhárom nulla: az origóba vetítünk mindent...
108 Méretezés Speciális eset: vetítés Ha s x, s y, s z valamelyike nulla ha egy nulla: az irányra merőleges síkra vetítünk ha kettő nulla: egy tengelyre vetítünk ha mindhárom nulla: az origóba vetítünk mindent... Észrevétel: a determináns nulla!
109 Méretezés Speciális eset: vetítés Ha s x, s y, s z valamelyike nulla ha egy nulla: az irányra merőleges síkra vetítünk ha kettő nulla: egy tengelyre vetítünk ha mindhárom nulla: az origóba vetítünk mindent... Észrevétel: a determináns nulla! nincs inverz!
110 Nyírás Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés


111 Nyírás Nyírás Példa Ha egy pakli kártyát lerakunk az asztalra és a lapokat egyenletesen szétcsúsztatjuk, de úgy, hogy a pakli még állva maradjon, az a nyírás.
112 Nyírás Nyírás Ha például minden pontban az x, y értekeket z-vel arányos mértékeben módosítjuk: 1 0 a 0 N = 0 1 b
113 Nyírás Nyírás Általánosan: 1 a b 0 N = 0 1 c
114 Áttérés új koordináta-rendszerre Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
115 Áttérés új koordináta-rendszerre Áttérés új koordináta-rendszerre Tegyük fel, hogy az i, j, k ortonormált bázisvektorok helyett át akarunk térni az u, v, w ortonormált bázisra (az új bázisvektorok koordinátáit ismerjük a régi bázisban).
116 Áttérés új koordináta-rendszerre Áttérés új koordináta-rendszerre Tegyük fel, hogy az i, j, k ortonormált bázisvektorok helyett át akarunk térni az u, v, w ortonormált bázisra (az új bázisvektorok koordinátáit ismerjük a régi bázisban). Mik lesznek az eddig [x, y, z] T koordinátákkal azonosított pont [x, y, z ] T koordinátái az új bázisban?
117 Áttérés új koordináta-rendszerre Áttérés új koordináta-rendszerre Tegyük fel, hogy az i, j, k ortonormált bázisvektorok helyett át akarunk térni az u, v, w ortonormált bázisra (az új bázisvektorok koordinátáit ismerjük a régi bázisban). Mik lesznek az eddig [x, y, z] T koordinátákkal azonosított pont [x, y, z ] T koordinátái az új bázisban? Azaz milyen x, y, z -re teljesül, hogy x = x u + y v + z w?
118 Áttérés új koordináta-rendszerre Áttérés új koordináta-rendszerre Tegyük fel, hogy az i, j, k ortonormált bázisvektorok helyett át akarunk térni az u, v, w ortonormált bázisra (az új bázisvektorok koordinátáit ismerjük a régi bázisban). Mik lesznek az eddig [x, y, z] T koordinátákkal azonosított pont [x, y, z ] T koordinátái az új bázisban? Azaz milyen x, y, z -re teljesül, hogy x = x u + y v + z w? x = [u, v, w]x = Bx
119 Áttérés új koordináta-rendszerre Áttérés új koordináta-rendszerre Tegyük fel, hogy az i, j, k ortonormált bázisvektorok helyett át akarunk térni az u, v, w ortonormált bázisra (az új bázisvektorok koordinátáit ismerjük a régi bázisban). Mik lesznek az eddig [x, y, z] T koordinátákkal azonosított pont [x, y, z ] T koordinátái az új bázisban? Azaz milyen x, y, z -re teljesül, hogy x = x u + y v + z w? x = [u, v, w]x = Bx x = B 1 x
120 Áttérés új koordináta-rendszerre Áttérés új koordináta-rendszerre Tegyük fel, hogy az i, j, k ortonormált bázisvektorok helyett át akarunk térni az u, v, w ortonormált bázisra (az új bázisvektorok koordinátáit ismerjük a régi bázisban). Mik lesznek az eddig [x, y, z] T koordinátákkal azonosított pont [x, y, z ] T koordinátái az új bázisban? Azaz milyen x, y, z -re teljesül, hogy x = x u + y v + z w? x = [u, v, w]x = Bx x = B 1 x Ortonormált mátrix inverze a mátrix transzponáltja, így az új koordinátákat adó M = B 1 mátrixunk a következő alakú M = u x u y u z 0 v x v y v z 0 w x w y w z
121 Áttérés új koordináta-rendszerre Áttérés új koordináta-rendszerre Tegyük fel, hogy az i, j, k ortonormált bázisvektorok helyett át akarunk térni az u, v, w ortonormált bázisra (az új bázisvektorok koordinátáit ismerjük a régi bázisban). Mik lesznek az eddig [x, y, z] T koordinátákkal azonosított pont [x, y, z ] T koordinátái az új bázisban? Azaz milyen x, y, z -re teljesül, hogy x = x u + y v + z w? x = [u, v, w]x = Bx x = B 1 x Ortonormált mátrix inverze a mátrix transzponáltja, így az új koordinátákat adó M = B 1 mátrixunk a következő alakú M = u x u y u z 0 v x v y v z 0 w x w y w z Ha az új origó koordinátája c, akkor M = B 1 T ( c x, c y, c z )
122 Áttekintés Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
123 Áttekintés Kommutativitás A mátrix szorzás nem kommutatív, úgyhogy általában nem igaz, hogy ABv = BAv Ez jó, mivel általában a transzformációk sem kommutatívak

124 Áttekintés Példa Forgatás majd eltolás Eltolás majd forgatás
125 Áttekintés Transzformációs mátrixok determinánsai A méretezésnél láttuk, hogy ha egy vagy három együtthatója negatív a transzformációnak, akkor az megfordítja a sodrásirányt. Általános esetre megfogalmazva: Ha det(a) > 0, akkor a sodrás irány változatlan marad Ha det(a) < 0, akkor a sodrás irány megfordul
126 Áttekintés Normálvektorok transzformációja Legyen g egy szakasz a síkba, n normálvekotrral. Legyen S az x tengely mentén kétszeres nyújtás leíró transzformáció.
127 Áttekintés Normálvektorok transzformációja Legyen g egy szakasz a síkba, n normálvekotrral. Legyen S az x tengely mentén kétszeres nyújtás leíró transzformáció. Probléma: g -t megkaphatjuk, ha eltranszformáljuk a két végpontját. Mi a helyzet g normálvektorával? n = Sn lesz?
128 Áttekintés Normálvektorok transzformációja Legyen g egy szakasz a síkba, n normálvekotrral. Legyen S az x tengely mentén kétszeres nyújtás leíró transzformáció. Probléma: g -t megkaphatjuk, ha eltranszformáljuk a két végpontját. Mi a helyzet g normálvektorával? n = Sn lesz? NEM!
129 Áttekintés Normálvektorok transzformációja Legyen g egy szakasz a síkba, n normálvekotrral. Legyen S az x tengely mentén kétszeres nyújtás leíró transzformáció. Probléma: g -t megkaphatjuk, ha eltranszformáljuk a két végpontját. Mi a helyzet g normálvektorával? n = Sn lesz? NEM!
130 Áttekintés Vizsgáljuk a normálvektor által megadott érintősík egyenletét!
131 Áttekintés Vizsgáljuk a normálvektor által megadott érintősík egyenletét! Legyen p az érintősík egy pontja, ekkor x akkor és csak akkor van rajta a síkon, ha x p, n = 0
132 Áttekintés Vizsgáljuk a normálvektor által megadott érintősík egyenletét! Legyen p az érintősík egy pontja, ekkor x akkor és csak akkor van rajta a síkon, ha x p, n = 0 Ekkor nyílván, tetszőleges (invertálható) A transzformáció mellett: A 1 A(x p), n = 0
133 Áttekintés Vizsgáljuk a normálvektor által megadott érintősík egyenletét! Legyen p az érintősík egy pontja, ekkor x akkor és csak akkor van rajta a síkon, ha x p, n = 0 Ekkor nyílván, tetszőleges (invertálható) A transzformáció mellett: A 1 A(x p), n = 0 A skaláris szorat és a mátrix szorzás szabályai alapján kapjuk, hogy A(x p), ( A 1) T n = 0
134 Áttekintés Vizsgáljuk a normálvektor által megadott érintősík egyenletét! Legyen p az érintősík egy pontja, ekkor x akkor és csak akkor van rajta a síkon, ha x p, n = 0 Ekkor nyílván, tetszőleges (invertálható) A transzformáció mellett: A 1 A(x p), n = 0 A skaláris szorat és a mátrix szorzás szabályai alapján kapjuk, hogy A(x p), ( A 1) T n = 0 Azaz a normálvektorokat az A mátrix helyett annak inverztranszponáltjával kell szorozni!
135 Áttekintés Megjegyzés A sík affin transzformációit egyértelműen meghatározza három független pont és azok képe
136 Áttekintés Megjegyzés A sík affin transzformációit egyértelműen meghatározza három független pont és azok képe A tér affin transzformációit egyértelműen meghatározza négy független pont és azok képe
137 Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés
138 Motiváció A színterünk képét akarjuk előálĺıtani: vetíteni egy síkra
139 Motiváció A színterünk képét akarjuk előálĺıtani: vetíteni egy síkra Az ember által látott képet nem lehet előálĺıtani affin transzformációk segítségével. A távolodó párhuzamosok összetartanak, nem maradnak párhuzamosak.
140 Motiváció A színterünk képét akarjuk előálĺıtani: vetíteni egy síkra Az ember által látott képet nem lehet előálĺıtani affin transzformációk segítségével. A távolodó párhuzamosok összetartanak, nem maradnak párhuzamosak. Ez a látvány előálĺıthatő központi vetítéssel. Ez a transzformáció a homogén térben lineáris transzformáció.
141 Motiváció A színterünk képét akarjuk előálĺıtani: vetíteni egy síkra Az ember által látott képet nem lehet előálĺıtani affin transzformációk segítségével. A távolodó párhuzamosok összetartanak, nem maradnak párhuzamosak. Ez a látvány előálĺıthatő központi vetítéssel. Ez a transzformáció a homogén térben lineáris transzformáció. Az affin transzformációk nem bántották az ideális elemeket, a fentiekhez azonban ez kell
142 Általános eset Ha egy homogén transzformációs mátrix utolsó sora nem [0, 0, 0, 1], akkor az olyan homogén lineáris transzformáció, ami az euklidészi térnek nem lineáris transzformációja.
143 Párhuzamos vetítés A mátrix ami megadja egyszerű, például az XY síkra való vetítés
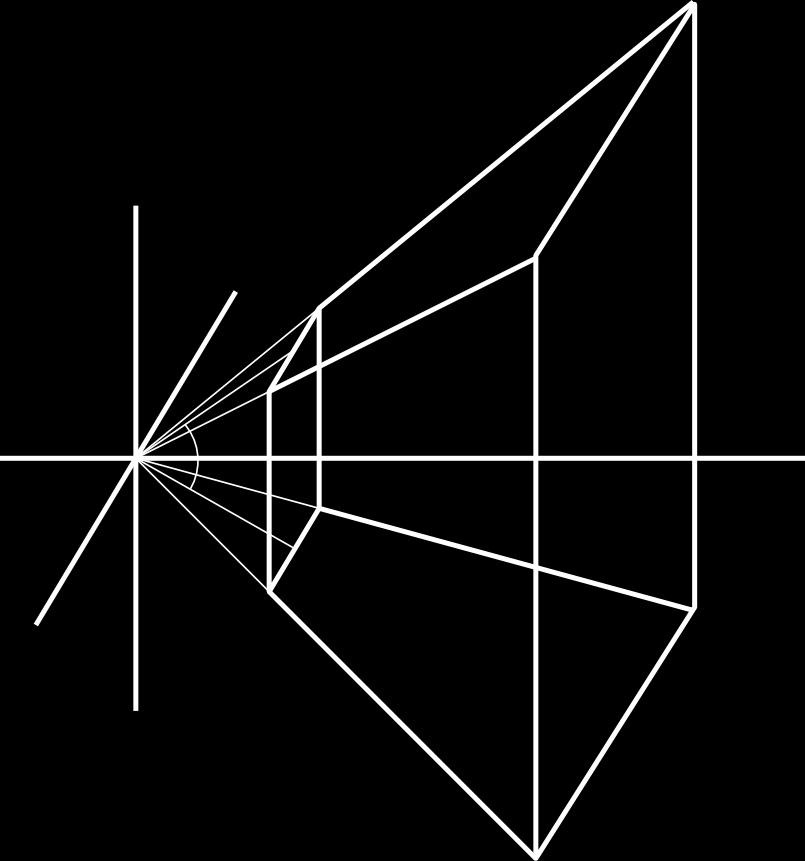
144 Perspektív transzformáció Központi vetítést valósít meg.
145 Perspektív transzformáció Központi vetítést valósít meg. Az origóbol a z tengely mentén nézünk a térre.
146 Perspektív transzformáció Központi vetítést valósít meg. Az origóbol a z tengely mentén nézünk a térre. A látótérnek egy csonkagúla felel meg.
147 Perspektív transzformáció Központi vetítést valósít meg. Az origóbol a z tengely mentén nézünk a térre. A látótérnek egy csonkagúla felel meg. A transzformáció a szem pozícióban találkozó vetítő egyenesekből párhuzamosokat csinál.
148 Perspektív transzformáció Központi vetítést valósít meg. Az origóbol a z tengely mentén nézünk a térre. A látótérnek egy csonkagúla felel meg. A transzformáció a szem pozícióban találkozó vetítő egyenesekből párhuzamosokat csinál. Paraméterei:
149 Perspektív transzformáció Központi vetítést valósít meg. Az origóbol a z tengely mentén nézünk a térre. A látótérnek egy csonkagúla felel meg. A transzformáció a szem pozícióban találkozó vetítő egyenesekből párhuzamosokat csinál. Paraméterei: a gúla függőleges nyílásszöge,
150 Perspektív transzformáció Központi vetítést valósít meg. Az origóbol a z tengely mentén nézünk a térre. A látótérnek egy csonkagúla felel meg. A transzformáció a szem pozícióban találkozó vetítő egyenesekből párhuzamosokat csinál. Paraméterei: a gúla függőleges nyílásszöge, a gúla alapjának az oldalainak az aránya,
151 Perspektív transzformáció Központi vetítést valósít meg. Az origóbol a z tengely mentén nézünk a térre. A látótérnek egy csonkagúla felel meg. A transzformáció a szem pozícióban találkozó vetítő egyenesekből párhuzamosokat csinál. Paraméterei: a gúla függőleges nyílásszöge, a gúla alapjának az oldalainak az aránya, a közeli vágósík távolsága
152 Perspektív transzformáció Központi vetítést valósít meg. Az origóbol a z tengely mentén nézünk a térre. A látótérnek egy csonkagúla felel meg. A transzformáció a szem pozícióban találkozó vetítő egyenesekből párhuzamosokat csinál. Paraméterei: a gúla függőleges nyílásszöge, a gúla alapjának az oldalainak az aránya, a közeli vágósík távolsága a távoli vágósík távolsága
153 Perspektív transzformáció
154 Homogén osztás Mivel egy M valódi projektív transzformáció utolsó sora nem [0, 0, 0, 1] T, ezért [x, y, z, w] T = Mv transzformáció után, w 1 általános esetben. Ha ezt a pontot az eukleidészi térbe szeretnénk átvinni (mert pl. meg akarjuk jeleníteni), akkor végig kell osztanunk w-vel. (Persze csak akkor, ha w 0) Ezt nevezzünk homogén osztásnak.
155 Középpontos vetítés
156 Középpontos vetítés
157 Középpontos vetítés
158 Középpontos vetítés Vagyis: x = x z d y = y z d z = z z d = d
159 Középpontos vetítés Az origó, mint vetítési középpont és egy, attól a Z tengely mentén d egységre található, XY síkkal párhuzamos vetítősíkra való vetítés mátrixa: d 0 Homogén osztás után ( z d -vel) a fentit kapjuk
160 Megjegyzés A sík projektív transzformációit egyértelműen meghatározza négy független pont és azok képe
161 Megjegyzés A sík projektív transzformációit egyértelműen meghatározza négy független pont és azok képe A tér projektív transzformációit egyértelműen meghatározza öt független pont és azok képe
162 Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes affin transzformációk Eltolás Forgatás Méretezés Nyírás Áttérés új koordináta-rendszerre Áttekintés 4 Projektív transzformáció 5 Összegzés

163 Transzformációs mátrixok
164 Transzformációs mátrixok Mi történik, ha a vektorunk negyedik koordinátája nulla (vagyis ha vektort azonosít a számnégyes)?
165 Transzformációs mátrixok Mi történik, ha a vektorunk negyedik koordinátája nulla (vagyis ha vektort azonosít a számnégyes)? Az eltolás rész nem hat rá!
166 Transzformációs mátrixok Mi történik, ha a vektorunk negyedik koordinátája nulla (vagyis ha vektort azonosít a számnégyes)? Az eltolás rész nem hat rá! Figyeljünk: nem mindenhol szoroznak jobbról a vektorokkal!
167 Transzformációs mátrixok
Tartalom. Nevezetes affin transzformációk. Valasek Gábor 2016/2017. tavaszi félév
 Tartalom Motiváció Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Transzformációk Transzformációk általában Nevezetes affin
Tartalom Motiváció Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Transzformációk Transzformációk általában Nevezetes affin
Transzformációk síkon, térben
 Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Klár Gergely 2010/2011. tavaszi félév
 Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Pont 1 Pont 2 3 4 5 Tartalom Pont Descartes-koordináták Homogén koordináták
Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Pont 1 Pont 2 3 4 5 Tartalom Pont Descartes-koordináták Homogén koordináták
Vektorterek. =a gyakorlatokon megoldásra ajánlott
 Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Térbeli transzformációk, a tér leképezése síkra
 Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag. Mátrix rangja
 VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
3D koordináta-rendszerek
 3D koordináta-rendszerek z z y x y x y balkezes bal-sodrású x jobbkezes jobb-sodrású z 3D transzformációk - homogén koordináták (x, y, z) megadása homogén koordinátákkal: (x, y, z, 1) (x, y, z, w) = (x,
3D koordináta-rendszerek z z y x y x y balkezes bal-sodrású x jobbkezes jobb-sodrású z 3D transzformációk - homogén koordináták (x, y, z) megadása homogén koordinátákkal: (x, y, z, 1) (x, y, z, w) = (x,
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Lin.Alg.Zh.1 feladatok
 Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
LINEÁRIS ALGEBRA. matematika alapszak. Euklideszi terek. SZTE Bolyai Intézet, őszi félév. Euklideszi terek LINEÁRIS ALGEBRA 1 / 40
 LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
Számítási feladatok a Számítógépi geometria órához
 Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Valasek Gábor valasek@inf.elte.hu
 Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2013/2014. őszi félév ( Eötvös LorándSzámítógépes TudományegyetemInformatikai Grafika Kar) 2013/2014.
Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2013/2014. őszi félév ( Eötvös LorándSzámítógépes TudományegyetemInformatikai Grafika Kar) 2013/2014.
Robotika. Kinematika. Magyar Attila
 Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Keresztmetszet másodrendű nyomatékainak meghatározása
 BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Haladó lineáris algebra
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
Lin.Alg.Zh.1 feladatok
 LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
17. előadás: Vektorok a térben
 17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Kvadratikus alakok és euklideszi terek (előadásvázlat, október 5.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Kvadratikus alakok és euklideszi terek (előadásvázlat, 0. október 5.) Maróti Miklós, Kátai-Urbán Kamilla Az előadáshoz ajánlott jegyzet: Szabó László: Bevezetés a lineáris algebrába, Polygon Kiadó, Szeged,
Kvadratikus alakok és euklideszi terek (előadásvázlat, 0. október 5.) Maróti Miklós, Kátai-Urbán Kamilla Az előadáshoz ajánlott jegyzet: Szabó László: Bevezetés a lineáris algebrába, Polygon Kiadó, Szeged,
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
Összeállította: dr. Leitold Adrien egyetemi docens
 Skaláris szorzat az R n vektortérben Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok skaláris szorzata Két R n -beli vektor skaláris szorzata: Legyen a = (a 1,a 2,,a n ) és b
Skaláris szorzat az R n vektortérben Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok skaláris szorzata Két R n -beli vektor skaláris szorzata: Legyen a = (a 1,a 2,,a n ) és b
8. előadás. Kúpszeletek
 8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Geometria III.
 Geometria III.") Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA MATEmATIkA I 8 VIII VEkTOROk 1 VEkTOR Vektoron irányított szakaszt értünk Jelölése: stb Vektorok hossza A vektor abszolút értéke az irányított szakasz hossza Ha a vektor hossza egységnyi akkor
KOVÁCS BÉLA MATEmATIkA I 8 VIII VEkTOROk 1 VEkTOR Vektoron irányított szakaszt értünk Jelölése: stb Vektorok hossza A vektor abszolút értéke az irányított szakasz hossza Ha a vektor hossza egységnyi akkor
Számítógépes geometria
 2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
1. Generátorrendszer. Házi feladat (fizikából tudjuk) Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak
 Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak") 1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
1. Mátrixösszeadás és skalárral szorzás
 1 Mátrixösszeadás és skalárral szorzás Mátrixok tömör jelölése T test Az M = a i j T n m azt az n sorból és m oszlopból álló mátrixot jelöli, amelyben az i-edik sor j-edik eleme a i j T Példák [ ] Ha M
1 Mátrixösszeadás és skalárral szorzás Mátrixok tömör jelölése T test Az M = a i j T n m azt az n sorból és m oszlopból álló mátrixot jelöli, amelyben az i-edik sor j-edik eleme a i j T Példák [ ] Ha M
Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás robotra
 Budapesti M szaki És Gazdaságtudományi Egyetem Gépészmérnöki Kar M szaki Mechanikai Tanszék Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás
Budapesti M szaki És Gazdaságtudományi Egyetem Gépészmérnöki Kar M szaki Mechanikai Tanszék Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
Hajder Levente 2018/2019. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Mátrixok 2017 Mátrixok
 2017 számtáblázatok" : számok rendezett halmaza, melyben a számok helye két paraméterrel van meghatározva. Például lineáris egyenletrendszer együtthatómátrixa 2 x 1 + 4 x 2 = 8 1 x 1 + 3 x 2 = 1 ( 2 4
2017 számtáblázatok" : számok rendezett halmaza, melyben a számok helye két paraméterrel van meghatározva. Például lineáris egyenletrendszer együtthatómátrixa 2 x 1 + 4 x 2 = 8 1 x 1 + 3 x 2 = 1 ( 2 4
Hajder Levente 2014/2015. tavaszi félév
 Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
Geometria II gyakorlatok
 Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2012. május 8. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2012. május 8. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
1. Lineáris transzformáció
 Lineáris transzformáció Lineáris transzformáció mátrixának felírása eg adott bázisban: Emlékeztető: Legen B = {u,, u n } eg tetszőleges bázisa az R n -nek, Eg tetszőleges v R n vektor egértelműen felírható
Lineáris transzformáció Lineáris transzformáció mátrixának felírása eg adott bázisban: Emlékeztető: Legen B = {u,, u n } eg tetszőleges bázisa az R n -nek, Eg tetszőleges v R n vektor egértelműen felírható
JEGYZET Geometria 2., tanárszak
 JEGYZET Geometria 2., tanárszak Hálás köszönet a segítségért Marosi Pollának, Kiss Györgynek, Lakos Gyulának, Tóth Árpádnak, Wintsche Gergőnek. Felhasznált fogalmak Felhasználjuk a valós vektortér és mátrix
JEGYZET Geometria 2., tanárszak Hálás köszönet a segítségért Marosi Pollának, Kiss Györgynek, Lakos Gyulának, Tóth Árpádnak, Wintsche Gergőnek. Felhasznált fogalmak Felhasználjuk a valós vektortér és mátrix
Felügyelt önálló tanulás - Analízis III.
 Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
1. zárthelyi,
 1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
1. zárthelyi, 2009.10.20. 1. Írjuk fel a tér P = (0,2,4) és Q = (6, 2,2) pontjait összekötő szakasz felezőmerőleges síkjának egyenletét. 2. Tekintsük az x + 2y + 3z = 14, a 2x + 6y + 10z = 24 és a 4x+2y
OpenGL és a mátrixok
 OpenGL és a mátrixok Róth Gergő 2013. március 4. Róth Gergő 1/20 A rajzoláskor a videókártya minden csúcson végrehajt egy transzformációt. Mire jó? Kamera helyének beállítása Egy objektum több pozícióra
OpenGL és a mátrixok Róth Gergő 2013. március 4. Róth Gergő 1/20 A rajzoláskor a videókártya minden csúcson végrehajt egy transzformációt. Mire jó? Kamera helyének beállítása Egy objektum több pozícióra
Alkalmazott algebra. Lineáris leképezések EIC. Wettl Ferenc ALGEBRA TANSZÉK BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK )
") B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Alkalmazott algebra BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK ) Lineáris leképezések
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Alkalmazott algebra BMETE90MX57 (FELSŐBB MATEMATIKA INFORMATIKUSOKNAK ) Lineáris leképezések
1. feladatsor Komplex számok
 . feladatsor Komplex számok.. Feladat. Kanonikus alakban számolva határozzuk meg az alábbi műveletek eredményét. (a) i 0 ; i 8 ; (b) + 4i; 3 i (c) ( + 5i)( 6i); (d) i 3+i ; (e) 3i ; (f) ( +3i)(8+i) ( 4
. feladatsor Komplex számok.. Feladat. Kanonikus alakban számolva határozzuk meg az alábbi műveletek eredményét. (a) i 0 ; i 8 ; (b) + 4i; 3 i (c) ( + 5i)( 6i); (d) i 3+i ; (e) 3i ; (f) ( +3i)(8+i) ( 4
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Lineáris algebra mérnököknek
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Lineáris algebra mérnököknek BMETE93BG20 Vektorok a 2- és 3-dimenziós tér Kf87 2017-09-05
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Lineáris algebra mérnököknek BMETE93BG20 Vektorok a 2- és 3-dimenziós tér Kf87 2017-09-05
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R n vektortér Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. R n vektortér/1 Vektorok Rendezett szám n-esek: a = (a 1, a 2,, a n ) sorvektor a1 a = a2 oszlopvektor... a n a 1, a 2,,
Az R n vektortér Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. R n vektortér/1 Vektorok Rendezett szám n-esek: a = (a 1, a 2,, a n ) sorvektor a1 a = a2 oszlopvektor... a n a 1, a 2,,
Testek. 16. Legyen z = 3 + 4i, w = 3 + i. Végezzük el az alábbi. a) (2 4), Z 5, b) (1, 0, 0, 1, 1) (1, 1, 1, 1, 0), Z 5 2.
 (2 4), Z 5, b) (1, 0, 0, 1, 1) (1, 1, 1, 1, 0), Z 5 2.") Vektorok. Melyek egyenlőek az alábbi vektorok közül? (a) (, 2, 0), (b) az (, 0, ) pontból a (2, 2, ) pontba mutató vektor, (c) ( 2,, ) ( 2,, 2), (d) [ 2 0 ], (e) 2. 0 2. Írjuk fel az x + y + 2z = 0 és
Vektorok. Melyek egyenlőek az alábbi vektorok közül? (a) (, 2, 0), (b) az (, 0, ) pontból a (2, 2, ) pontba mutató vektor, (c) ( 2,, ) ( 2,, 2), (d) [ 2 0 ], (e) 2. 0 2. Írjuk fel az x + y + 2z = 0 és
Vektorok és koordinátageometria
 Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Budapesti Műszaki Főiskola, Neumann János Informatikai Kar. Vektorok. Fodor János
 Budapesti Műszaki Főiskola, Neumann János Informatikai Kar Lineáris algebra 1. témakör Vektorok Fodor János Copyright c Fodor@bmf.hu Last Revision Date: 2006. szeptember 11. Version 1.1 Table of Contents
Budapesti Műszaki Főiskola, Neumann János Informatikai Kar Lineáris algebra 1. témakör Vektorok Fodor János Copyright c Fodor@bmf.hu Last Revision Date: 2006. szeptember 11. Version 1.1 Table of Contents
Matematika szigorlat június 17. Neptun kód:
 Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
1. feladatsor: Vektorfüggvények deriválása (megoldás)
") Matematika A gyakorlat Energetika és Mechatronika BSc szakok 016/17 ősz 1. feladatsor: Vektorfüggvények deriválása megoldás) 1. Tekintsük azt az L : R R lineáris leképezést ami az 1 0) vektort az 1 0 )
Matematika A gyakorlat Energetika és Mechatronika BSc szakok 016/17 ősz 1. feladatsor: Vektorfüggvények deriválása megoldás) 1. Tekintsük azt az L : R R lineáris leképezést ami az 1 0) vektort az 1 0 )
Transzformációk. Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform
 Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
5. előadás. Skaláris szorzás
 5. előadás Skaláris szorzás Bevezetés Két vektor hajlásszöge: a vektorokkal párhuzamos és egyirányú, egy pontból induló félegyenesek konvex szöge. φ Bevezetés Definíció: Két vektor skaláris szorzata abszolút
5. előadás Skaláris szorzás Bevezetés Két vektor hajlásszöge: a vektorokkal párhuzamos és egyirányú, egy pontból induló félegyenesek konvex szöge. φ Bevezetés Definíció: Két vektor skaláris szorzata abszolút
Vektorok. Wettl Ferenc október 20. Wettl Ferenc Vektorok október / 36
 Vektorok Wettl Ferenc 2014. október 20. Wettl Ferenc Vektorok 2014. október 20. 1 / 36 Tartalom 1 Vektorok a 2- és 3-dimenziós térben 2 Távolság, szög, orientáció 3 Vektorok koordinátás alakban 4 Összefoglalás
Vektorok Wettl Ferenc 2014. október 20. Wettl Ferenc Vektorok 2014. október 20. 1 / 36 Tartalom 1 Vektorok a 2- és 3-dimenziós térben 2 Távolság, szög, orientáció 3 Vektorok koordinátás alakban 4 Összefoglalás
Diszkrét matematika I., 12. előadás Dr. Takách Géza NyME FMK Informatikai Intézet takach november 30.
 1 Diszkrét matematika I, 12 előadás Dr Takách Géza NyME FMK Informatikai Intézet takach@infnymehu http://infnymehu/ takach 2005 november 30 Vektorok Definíció Egy tetszőleges n pozitív egész számra n-komponensű
1 Diszkrét matematika I, 12 előadás Dr Takách Géza NyME FMK Informatikai Intézet takach@infnymehu http://infnymehu/ takach 2005 november 30 Vektorok Definíció Egy tetszőleges n pozitív egész számra n-komponensű
Egybevágósági transzformációk. A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá.
 Egybevágósági transzformációk A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá. Egybevágósági transzformációk azok a geometriai transzformációk, amelyeknél bármely
Egybevágósági transzformációk A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá. Egybevágósági transzformációk azok a geometriai transzformációk, amelyeknél bármely
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Térbeli geometriai transzformációk analitikus leírása
 Eötvös Loránd Tudományegyetem Természettudományi Kar Térbeli geometriai transzformációk analitikus leírása Szakdolgozat Készítette: Témavezeto : Fodor Edina Verhóczki László Matematika BSc, Tanári szakirány
Eötvös Loránd Tudományegyetem Természettudományi Kar Térbeli geometriai transzformációk analitikus leírása Szakdolgozat Készítette: Témavezeto : Fodor Edina Verhóczki László Matematika BSc, Tanári szakirány
Matematika szigorlat, Mérnök informatikus szak I máj. 29.
 Matematika szigorlat, Mérnök informatikus szak I. 2007. máj. 29. Megoldókulcs 1. Adott az S : 3x 6y + 2z = 6 sík a három dimenziós térben. (a) Írja fel egy tetszőleges, az S-re merőleges S síknak az egyenletét!
Matematika szigorlat, Mérnök informatikus szak I. 2007. máj. 29. Megoldókulcs 1. Adott az S : 3x 6y + 2z = 6 sík a három dimenziós térben. (a) Írja fel egy tetszőleges, az S-re merőleges S síknak az egyenletét!
1.1. Vektorok és operátorok mátrix formában
 1. Reprezentáció elmélet 1.1. Vektorok és operátorok mátrix formában A vektorok és az operátorok mátrixok formájában is felírhatók. A végtelen dimenziós ket vektoroknak végtelen sok sort tartalmazó oszlopmátrix
1. Reprezentáció elmélet 1.1. Vektorok és operátorok mátrix formában A vektorok és az operátorok mátrixok formájában is felírhatók. A végtelen dimenziós ket vektoroknak végtelen sok sort tartalmazó oszlopmátrix
Geometria II gyakorlatok
 Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2011. november 29. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2011. november 29. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Gyakorló feladatok I.
 Gyakorló feladatok I. a Matematika Aa Vektorüggvények tárgyhoz (D D5 kurzusok) Összeállította: Szili László Ajánlott irodalmak:. G.B. Thomas, M.D. Weir, J. Hass, F.R. Giordano: Thomas-féle KALKULUS I.,
Gyakorló feladatok I. a Matematika Aa Vektorüggvények tárgyhoz (D D5 kurzusok) Összeállította: Szili László Ajánlott irodalmak:. G.B. Thomas, M.D. Weir, J. Hass, F.R. Giordano: Thomas-féle KALKULUS I.,
1. Szabadvektorok és analitikus geometria
 1. Szabadvektorok és analitikus geometria Ebben a fejezetben megismerkedünk a szabadvektorok fogalmával, amely a középiskolai vektorfogalom pontosítása. Előzetes ismeretként feltételezzük az euklideszi
1. Szabadvektorok és analitikus geometria Ebben a fejezetben megismerkedünk a szabadvektorok fogalmával, amely a középiskolai vektorfogalom pontosítása. Előzetes ismeretként feltételezzük az euklideszi
1. Transzformációk mátrixa
 1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
Lineáris leképezések. 2. Lineáris-e az f : R 2 R 2 f(x, y) = (x + y, x 2 )
 = (x + y, x 2 )") Lineáris leképezések 1 Lineáris-e az f : R 2 R 2 f(x, y = (3x + 2y, x y leképezés? A linearitáshoz ellen riznünk kell, hogy a leképzés additív és homogén Legyen x = (x 1, R 2, y = (y 1, y 2 R 2, c R Ekkor
Lineáris leképezések 1 Lineáris-e az f : R 2 R 2 f(x, y = (3x + 2y, x y leképezés? A linearitáshoz ellen riznünk kell, hogy a leképzés additív és homogén Legyen x = (x 1, R 2, y = (y 1, y 2 R 2, c R Ekkor
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport
 Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Transzformációk. Szécsi László
 Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
1. A komplex számok ábrázolása
 1. komplex számok ábrázolása Vektorok és helyvektorok. Ismétlés sík vektorai irányított szakaszok, de két vektor egyenlő, ha párhuzamosak, egyenlő hosszúak és irányúak. Így minden vektor kezdőpontja az
1. komplex számok ábrázolása Vektorok és helyvektorok. Ismétlés sík vektorai irányított szakaszok, de két vektor egyenlő, ha párhuzamosak, egyenlő hosszúak és irányúak. Így minden vektor kezdőpontja az
MateFIZIKA: Pörgés, forgás, csavarodás (Vektorok és axiálvektorok a fizikában)
") MateFIZIKA: Pörgés, forgás, csavarodás (Vektorok és axiálvektorok a fizikában) Tasnádi Tamás 1 2015. április 17. 1 BME, Mat. Int., Analízis Tsz. Tartalom Vektorok és axiálvektorok Forgómozgás, pörgettyűk
MateFIZIKA: Pörgés, forgás, csavarodás (Vektorok és axiálvektorok a fizikában) Tasnádi Tamás 1 2015. április 17. 1 BME, Mat. Int., Analízis Tsz. Tartalom Vektorok és axiálvektorok Forgómozgás, pörgettyűk
I. Vektorok. Adott A (2; 5) és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:
 és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:") I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11
![5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11](/thumbs/93/113569557.jpg "5 1 6 (2x3 + 4) 7. 4 ( ctg(4x + 2)) + c = 3 4 ctg(4x + 2) + c ] 12 (2x6 + 9) 20 ln(5x4 + 17) + c ch(8x) 20 ln 5x c = 11") Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
Bodó Beáta ISMÉTLÉS. ch(6 d.. 4.. 6. 7. 8. 9..... 4.. e (8 d ch (9 + 7 d ( + 4 6 d 7 8 + d sin (4 + d cos sin d 7 ( 6 + 9 4 d INTEGRÁLSZÁMÍTÁS 7 6 sh(6 + c 8 e(8 + c 9 th(9 + 7 + c 6 ( + 4 7 + c = 7 4
2) A koordinátázott síkban adva van egy E ellipszis, melyet az x2
 A koordinátázott síkban adva van egy E ellipszis, melyet az x2") 1. feladatsor (Kúpszeletekre vonatkozó feladatok) Ha egy feladatban síkbeli koordinátákat alkalmazunk, akkor azok egy derékszög koordinátarendszerre vonatkoznak, melynek kezd pontja O és ortonormált alapvektorai
1. feladatsor (Kúpszeletekre vonatkozó feladatok) Ha egy feladatban síkbeli koordinátákat alkalmazunk, akkor azok egy derékszög koordinátarendszerre vonatkoznak, melynek kezd pontja O és ortonormált alapvektorai
Geometriai Optika (sugároptika)
") Geometriai Optika (sugároptika) - Egyszerû optikai eszközök, ahogy már ismerjük õket - Mi van ha egymás után tesszük: leképezések egymásutánja (bonyolult) - Gyakorlatilag fontos eset: paraxiális közelítés
Geometriai Optika (sugároptika) - Egyszerû optikai eszközök, ahogy már ismerjük õket - Mi van ha egymás után tesszük: leképezések egymásutánja (bonyolult) - Gyakorlatilag fontos eset: paraxiális közelítés
1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás)
") Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
= Y y 0. = Z z 0. u 1. = Z z 1 z 2 z 1. = Y y 1 y 2 y 1
 Egyenes és sík a térben Elméleti áttekintés Az egyenes paraméteres egyenlete: X = u 1 λ + x 0 Y = u λ + y 0, Z = u λ + z 0 ahol a λ egy valós paraméter Az u = (u 1, u, u ) az egyenes irányvektora és P
Egyenes és sík a térben Elméleti áttekintés Az egyenes paraméteres egyenlete: X = u 1 λ + x 0 Y = u λ + y 0, Z = u λ + z 0 ahol a λ egy valós paraméter Az u = (u 1, u, u ) az egyenes irányvektora és P
9. Írjuk fel annak a síknak az egyenletét, amely átmegy az M 0(1, 2, 3) ponton és. egyenessel;
 ponton és. egyenessel;") Síkok és egyenesek FELADATLAP Írjuk fel annak az egyenesnek az egyenletét, amely átmegy az M 0(,, ) ponton és a) az M(,, 0) ponton; b) párhuzamos a d(,, 5) vektorral; c) merőleges a x y + z 0 = 0 síkra;
Síkok és egyenesek FELADATLAP Írjuk fel annak az egyenesnek az egyenletét, amely átmegy az M 0(,, ) ponton és a) az M(,, 0) ponton; b) párhuzamos a d(,, 5) vektorral; c) merőleges a x y + z 0 = 0 síkra;
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
Lineáris algebra. =0 iє{1,,n}
 Matek A2 (Lineáris algebra) Felhasználtam a Szilágyi Brigittás órai jegyzeteket, néhol a Thomas féle Kalkulus III könyvet. A hibákért felelosséget nem vállalok. Hiányosságok vannak(1. órai lin algebrai
Matek A2 (Lineáris algebra) Felhasználtam a Szilágyi Brigittás órai jegyzeteket, néhol a Thomas féle Kalkulus III könyvet. A hibákért felelosséget nem vállalok. Hiányosságok vannak(1. órai lin algebrai
Lineáris leképezések, mátrixuk, bázistranszformáció. Képtér, magtér, dimenziótétel, rang, invertálhatóság
 1. Bevezetés A félév anyaga: lineáris algebra Vektorterek, alterek Függés, függetlenség, bázis, dimenzió Skaláris szorzat R n -ben, vektorok hossza és szöge Lineáris leképezések, mátrixuk, bázistranszformáció
1. Bevezetés A félév anyaga: lineáris algebra Vektorterek, alterek Függés, függetlenség, bázis, dimenzió Skaláris szorzat R n -ben, vektorok hossza és szöge Lineáris leképezések, mátrixuk, bázistranszformáció
Feladatok a Gazdasági matematika II. tárgy gyakorlataihoz
 Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
1. Bázistranszformáció
 1. Bázistranszformáció Transzformáció mátrixa új bázisban A bázistranszformáció képlete (Freud, 5.8.1. Tétel) Legyenek b és d bázisok V -ben, ] v V és A Hom(V). Jelölje S = [[d 1 ] b,...,[d n ] b T n n
1. Bázistranszformáció Transzformáció mátrixa új bázisban A bázistranszformáció képlete (Freud, 5.8.1. Tétel) Legyenek b és d bázisok V -ben, ] v V és A Hom(V). Jelölje S = [[d 1 ] b,...,[d n ] b T n n
Nagy András. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 2010.
 Nagy András Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 010. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 1) Döntsd el, hogy a P pont illeszkedik-e az e egyenesre
Nagy András Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 010. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 1) Döntsd el, hogy a P pont illeszkedik-e az e egyenesre
Nagy Gábor compalg.inf.elte.hu/ nagy
 Diszkrét matematika 3. estis képzés 2018. ősz 1. Diszkrét matematika 3. estis képzés 2. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Diszkrét matematika 3. estis képzés 2018. ősz 1. Diszkrét matematika 3. estis képzés 2. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Intergrált Intenzív Matematika Érettségi
 . Adott a mátri, determináns determináns, ahol,, d Számítsd ki:. b) Igazold, hogy a b c. Adott a az 6 0 egyenlet megoldásai. a). c) Számítsd ki a d determináns értékét. d c a b determináns, ahol abc,,.
. Adott a mátri, determináns determináns, ahol,, d Számítsd ki:. b) Igazold, hogy a b c. Adott a az 6 0 egyenlet megoldásai. a). c) Számítsd ki a d determináns értékét. d c a b determináns, ahol abc,,.
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Megoldások
 Megoldások") Megoldások 1. Tekintsük az alábbi szabályos hatszögben a következő vektorokat: a = AB és b = AF. Add meg az FO, DC, AO, AC, BE, FB, CE, DF vektorok koordinátáit az (a ; b ) koordinátarendszerben! Alkalmazzuk
Megoldások 1. Tekintsük az alábbi szabályos hatszögben a következő vektorokat: a = AB és b = AF. Add meg az FO, DC, AO, AC, BE, FB, CE, DF vektorok koordinátáit az (a ; b ) koordinátarendszerben! Alkalmazzuk
Egybevágósági transzformációk
 Egybevágósági transzformációk Párhuzamos eltolás Geometriai transzformációk Egybevágósági transzformációk (9. osztály) Helybenhagyás Tengelyes tükrözés Középpontos tükrözés Pont körüli forgatás Párhuzamos
Egybevágósági transzformációk Párhuzamos eltolás Geometriai transzformációk Egybevágósági transzformációk (9. osztály) Helybenhagyás Tengelyes tükrözés Középpontos tükrözés Pont körüli forgatás Párhuzamos
A gyakorlati jegy
 . Bevezetés A félév anyaga: lineáris algebra Vektorterek, alterek Függés, függetlenség, bázis, dimenzió Skaláris szorzat R n -ben, vektorok hossza és szöge Lineáris leképezések, mátrixuk, bázistranszformáció
. Bevezetés A félév anyaga: lineáris algebra Vektorterek, alterek Függés, függetlenség, bázis, dimenzió Skaláris szorzat R n -ben, vektorok hossza és szöge Lineáris leképezések, mátrixuk, bázistranszformáció
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek
 16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek EGYBEVÁGÓSÁGI TRANSZFORMÁCIÓK Geometriai transzformáció Def:Olyan speciális függvény, melynek értelmezési
16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek EGYBEVÁGÓSÁGI TRANSZFORMÁCIÓK Geometriai transzformáció Def:Olyan speciális függvény, melynek értelmezési
2. ELŐADÁS. Transzformációk Egyszerű alakzatok
 2. ELŐADÁS Transzformációk Egyszerű alakzatok Eltolás A tér bármely P és P pontpárjához pontosan egy olyan eltolás létezik, amely P-t P -be viszi. Bármely eltolás tetszőleges egyenest vele párhuzamos egyenesbe
2. ELŐADÁS Transzformációk Egyszerű alakzatok Eltolás A tér bármely P és P pontpárjához pontosan egy olyan eltolás létezik, amely P-t P -be viszi. Bármely eltolás tetszőleges egyenest vele párhuzamos egyenesbe
Egy sík és a koordinátasíkok metszésvonalainak meghatározása
 1 Egy sík és a koordinátasíkok metszésvonalainak meghatározása Ehhez tekintsük az 1. ábrát! 1. ábra Itt az ( u, v, w ) tengelymetszeteivel adott S síkot látjuk, az Oxyz térbeli derékszögű koordináta -
1 Egy sík és a koordinátasíkok metszésvonalainak meghatározása Ehhez tekintsük az 1. ábrát! 1. ábra Itt az ( u, v, w ) tengelymetszeteivel adott S síkot látjuk, az Oxyz térbeli derékszögű koordináta -
Determinánsok. A determináns fogalma olyan algebrai segédeszköz, amellyel. szolgáltat az előbbi kérdésekre, bár ez nem mindig hatékony.
 Determinánsok A determináns fogalma olyan algebrai segédeszköz, amellyel jól jellemezhető a mátrixok invertálhatósága, a mátrix rangja. Segítségével lineáris egyenletrendszerek megoldhatósága dönthető
Determinánsok A determináns fogalma olyan algebrai segédeszköz, amellyel jól jellemezhető a mátrixok invertálhatósága, a mátrix rangja. Segítségével lineáris egyenletrendszerek megoldhatósága dönthető
Az egyenlőtlenség mindkét oldalát szorozzuk meg 4 16-al:
 Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
Bevezető matematika kémikusoknak., 04. ősz. feladatlap. Ábrázoljuk számegyenesen a következő egyenlőtlenségek megoldáshalmazát! (a) x 5 < 3 5 x < 3 x 5 < (d) 5 x
Képfeldolgozás. 1. el adás. A képfeldolgozás m veletei. Mechatronikai mérnök szak BME, 2008
 Képfeldolgozás 1. el adás. A képfeldolgozás m veletei Mechatronikai mérnök szak BME, 2008 1 / 61 Alapfogalmak transzformációk Deníció Deníció Geometriai korrekciókra akkor van szükség, ha a képr l valódi
Képfeldolgozás 1. el adás. A képfeldolgozás m veletei Mechatronikai mérnök szak BME, 2008 1 / 61 Alapfogalmak transzformációk Deníció Deníció Geometriai korrekciókra akkor van szükség, ha a képr l valódi