Meteorológiai Adatasszimiláció
|
|
|
- Boglárka Gáspárné
- 5 évvel ezelőtt
- Látták:
Átírás
1 Meteorológiai Adatasszimiláció 2017 November 17 összeállította: Bölöni Gergely
2 Tartalom
3 Numerikus el rejelzés: a hidro-termodinamikai egyenletek (HTE) numerikus megoldása a HTE megoldása vegyes feladat parciális dierenciál egyenlet kezdeti és peremértékek megadásával Adatasszimiláció: a kezdeti feltételek megadása Lényeges a pontosság a HTE rendszer megoldásának kezdeti feltételekre való érzékenysége miatt ("a légkör kaotikus viselkedése")

4 Kezdeti feltételekre való érzékenység

5 Kezdeti feltételekre való érzékenység



6 Kezdeti feltételekre való érzékenység Referencia analízis El rejelzés "jó" kezdeti feltételb l El rejelzés "rossz" kezdeti feltételb l
7 Adatasszimiláció: dinamikai-statisztikai becslés a légkör valós állapotára Milyen igényeket támasztunk? használjunk minden rendelkezésünkre álló információt (meggyelések, modell, tudás a légkörr l) optimálisan "ötvözzük" ezeket (minimális becslési hiba) vegyük gyelembe a felhasznált információk hibáját a becslés legyen összhangban a HTE dinamikai egyenleteivel
8 1D: egyetlen térbeli pont egyetlen változó x x a becslést adunk x t -re (a valós állapotra) rendelkezésünkre állnak y 1 és y 2 meggyelések ɛ 1 és ɛ 2 hibával terhelve y 1 = x t + ɛ 1 y 2 = x t + ɛ 2 x a = ˆx t = f(y 1, y 2 )
9 Feltesszük, hogy: a mérések torzítatlanok (nincs szisztematikus hiba) E(ɛ 1 ) = E(ɛ 2 ) = 0 a mérési hibák szórásnégyzete ismert σ 2 1 = E(ɛ 2 1) σ 2 2 = E(ɛ 2 2) a mérési hibák korrelálatlanok E(ɛ 1 ɛ 2 ) = 0
10 Kérdés: x a = f(y 1, y 2 ) =? Több megközelítés léztezik: 1 Legkisebb négyzetek módszere 2 Maximum-likelihood módszer
11 Legkisebb négyzetek módszere Szeretnénk, hogy y 1 = x t + ɛ 1 y 2 = x t + ɛ 2 k 1 =? k 2 =? x a = k 1 y 1 + k 2 y 2 a becslés torzítatlan legyen: E(x a x t ) = 0 k 1 + k 2 = 1 a négyzetes hiba minimális legyen σ 2 a = E((x a x t ) 2 ) = min
12 : feladat (1) Mutassuk meg, hogy y 1 = x t + ɛ 1 y 2 = x t + ɛ 2 k 1 =? k 2 =? x a = k 1 y 1 + k 2 y 2 E(x a x t) = 0 k 1 + k 2 = 1
13 Legkisebb négyzetek módszere } x a = k 1y 1 + k 2y 2 k 1 + k 2 = 1 x a = k 1y 1 + (1 k 1)y 2 Feladat: min σ 2 a(k 1) σ 2 a(k 1) = E((x a x t) 2 ) = E((k 1(x t + ɛ 1) + (1 k 1)(x t + ɛ 2) x t) 2 ) = E((k 1ɛ 1 + (1 k 1)ɛ 2) 2 ) = k 2 1E(ɛ 2 1) + 2k 1(1 k 1)E(ɛ 1ɛ 2) + (1 k 1) 2 E(ɛ 2 2) = k 2 1σ (1 k 1) 2 σ 2 2 min k 1 szerinti derivált 0
14 Legkisebb négyzetek módszere k 1 = σ2 2 σ σ2 2 k 2 = 1 k 1 = σ2 1 σ σ2 2 A becslés: x a = σ2 2 y 1 + σ2 1 y 2 σ1 2 + σ2 2 σ1 2 + σ2 2 A becslés megbízhatósága: 1 σ 2 a = 1 σ σ 2 2 = i 1 σ 2 i minden meggyelés növeli a megbízhatóságot
15 : feladat (2) Tudjuk σ 2 a = k2 1 σ2 1 + σ k2 2 σ k 1 = σ1 2 + σ2 2 σ1 2 k 2 = 1 k 1 = σ1 2 + σ2 2 Mutassuk meg, hogy 1 σ 2 a = 1 σ σ2 2 = i 1 σ 2 i
16 Maximum-likelihood módszer A meteorológiai mez k "jól" modellezhet k Normális eloszlású valószín ségi változókként x N (m, σ 2 ) f(x) = ) 1 ( σ 2π exp (x m)2 2σ 2
17 Maximum-likelihood módszer Az y 1, y 2 mérések független becslést adnak x t-re x várható értékkel és σ 1, σ 2 szórással: f(y 1) = f(y 2) = ) 1 (y1 x)2 exp ( σ 1 2π 2σ1 2 ) ( 1 σ 2 2π exp (y2 x)2 2σ 2 2 Becslés: x a az együttes s r ségfüggvény x szerinti maximuma: x a max x f(y 1)f(y 2)
18 Maximum-likelihood módszer
19 Maximum-likelihood módszer x a max x = max x x a min x f(y 1)f(y 2) ( 1 σ exp 1σ 22π ( 1 (y 1 x) σ1 2 2 ( 1 (y 1 x) 2 2 σ1 2 ) (y 2 x) 2 σ )) (y 2 x) 2 2 σ 2 2 x a = 1 σ 2 a = σ 2 2 σ1 2 + y 1 + σ2 1 σ2 2 σ1 2 + σ = 1 σ1 2 σ2 2 σ 2 i i y 2 minden meggyelés növeli a megbízhatóságot
20 : feladat (3) Mutassuk meg, hogy argmin x ( 1 (y 1 x) 2 2 σ (y 2 x) 2 ) σ2 2 σ1 2 2 σ2 2 = x a = σ1 2 + y 1 + σ2 2 σ1 2 + y 2 σ2 2
21 Példa: y 1 = 5, σ 1 = 1 y 2 = 10, σ 2 = 2 x a = 6, σ a = 0.8
22 Összefoglalás: Normális eloszlású hibák esetén a legkisebb négyzetek módszere és a maximum-likelihood módszerek ekvivalensek Legkisebb négyzetek módszere Optimális Interpoláció (OI) (Lineáris regresszió) Maximum-likelihood módszer Variációs módszer (veszteség függvény) p x a = k iy i k i =? i=1 J(x) = 1 2 p (x y i) 2 i=1 σ 2 i argminj(x) =? x
23 Modell el rejelzés használata a becslésben 1D: egyetlen térbeli pont egyetlen változó x x a becslést adunk x t-re (a valós állapotra) rendelkezésünkre állnak x b modell el rejelzés illetve y meggyelés ɛ b és ɛ o hibával terhelve x b = x t + ɛ b y = x t + ɛ o x a = ˆx t = f(x b, y) E(ɛ b ) = E(ɛ o) = 0 E(ɛ b ɛ o) = 0 σb 2 = E(ɛ 2 b), σo 2 = E(ɛ 2 o) ismertek
24 Legkisebb négyzetek módszere σ2 o k 1 = σb 2 + σ2 o x a = k 1x b + k 2y σ2 b k 2 = 1 k 1 = σb 2 + σ2 o = x b + (k 1 1)x b + k 2y = x b k 2x b + k 2y = x b + k 2(y x b ) x a = x b + σ2 b σb 2 + (y x b ) σ2 o Maximum-likelihood módszer J(x) = 1 (x x b ) (x y) 2 2 σb 2 2 σo 2
25 Adatasszimiláció: dinamikai modell meggyelésekkel való "frissítése" statisztikailag optimális módon... kék nyilak: a változónk id beli alakulása (x a x b ) a PDE (dinamikai modell) által y: meggyelések x b : modell el rejelzés azaz "background" (rst guess) x a: "analízis", vagyis a valós állapot (x t ) lehet legjobb becslése x b és y alapján
26 N 10 7 modell rácspont egy id pillanatban A dinamikus modell a Navier-Stokes egyenletek (nem-lineáris PDE) P 10 5 meggyelést (y) használunk analízisenként: felszíni, repül gépes, m holdas, radar, Wind-proler, stb. Az y meggyelések nem esnek a modell rácspontokba x és nem feltétlenül közvetlenül a modellezett mennyiségeket mérik

27 A globális meggyel hálózat
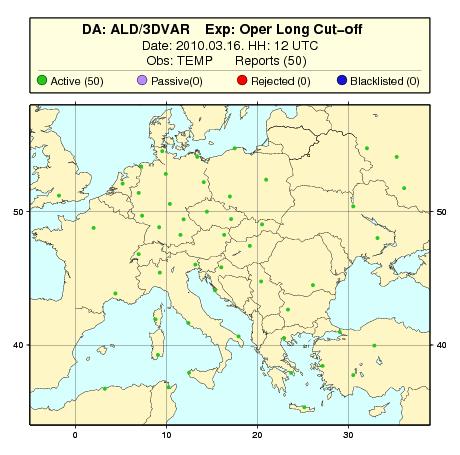
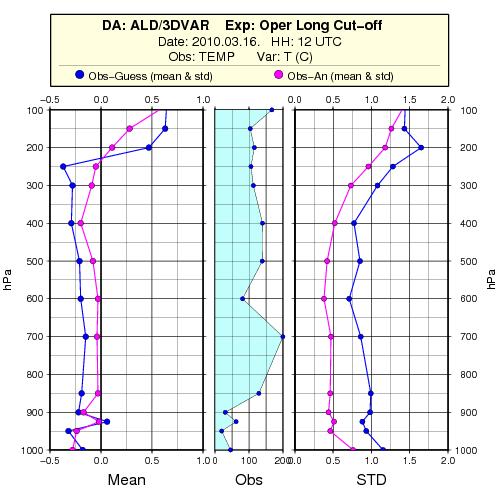
28 Felszíni meggyelések Rádiószondák

29 Repül gépes meggyelések
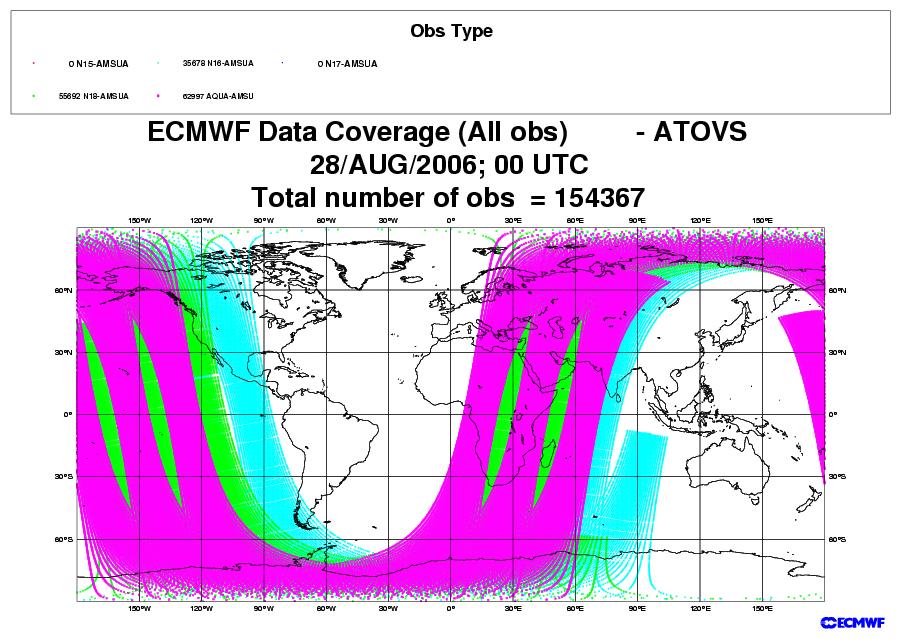
30 M holdas meggyelések

31 Modell tér (R N, N 10 7 ) Meggyelési tér (R P, P 10 5 )
32 Modell tér (R N, N 10 7 ) Meggyelési tér (R P, P 10 5 ) x x R N ɛ b ɛ b R N ɛ a ɛ a R N σb 2 B N N = E(ɛ b ɛ T b ) σa 2 A N N = E(ɛ aɛ T a ) y y R P ɛ o ɛ o R P σ 2 o R P P = E(ɛ oɛ o T ) Kapcsolat a két tér közt: H : R N R P a nem-lineáris meggyelési operátor, tehát H(x b ) "szimulált meggyeléseket" ad H P N = H x a tangens lineáris közelítése H-nak H T N P a transzponáltja (adjungált) H-nak
33 Több dimenziós felírás optimális interpoláció (Legkisebb négyzetek módszere) x a = x b + K(y H(x b )) K = BH T (HBH T + R) 1 variációs veszteségfüggvény (Maximum-likelihood módszer) J(x) = 1 2 (x x b) T B 1 (x x b ) (y H(x))T R 1 (y H(x)) Áll: a fenti két módszer ekvivalenciája több dimenzióban is igaz amennyiben H = H lineáris
34 A veszteségfüggvény inkrementális alakja J(x) = 1 2 (x x b) T B 1 (x x b ) (y H(x))T R 1 (y H(x)) Feltételezzük, hogy x b egy elég jó becslés azaz a szükséges δx = x x b korrekció kicsi lesz Ilyen módon H(x) = H(x b + δx) H(x b ) + H x (x)δx + 2 H x 2 (x) δ2 x H(x b ) + Hδx J(δx) = 1 2 δxt B 1 δx (y H(x b) Hδx) T R 1 (y H(x b ) Hδx) = 1 2 δxt B 1 δx (d Hδx)T R 1 (d Hδx) ahol d = y H(x b ).
35 A veszteségfüggvény gradiense Néhány mátrix m velet (AB) T = B T A T y = x T Ad y x = Ad y = d T Ax y x = AT x y = xt Ax y x = 2Ax 2J(δx) = δx T B 1 δx + (d Hδx) T R 1 (d Hδx) = δx T B 1 δx + d T R 1 d d T R 1 Hδx δx T H T R 1 d + δx T H T R 1 Hδx 0 = 2 δx J = 2B 1 δx a H T R 1 d H T R 1 d + 2H T R 1 Hδx a = (B 1 + H T R 1 H)δx a H T R 1 d x a = x b + (B 1 + H T R 1 H) 1 H T R 1 (y H(x b )) Áll: (B 1 + H T R 1 H) 1 H T R 1 = K = BH T (HBH T + R) 1
36 Áll: (B 1 + H T R 1 H) 1 H T R 1 = BH T (HBH T + R) 1 Biz: H T R 1 (HBH T + R) = (B 1 + H T R 1 H)BH T H T R 1 HBH T + H T = H T + H T R 1 HBH T A variációs és az optimális interpoláció ekvivalensek de csak lineáris meggyelési operátor esetén Ha a meggyelési operátor nem-lineáris, a variációs módszer jobb becslést ad
37 Összegzés: az adatasszimiláció során az analízis egyenlet megoldásával (BLUE - Best Linear Unbiased Estimate) lapjuk a becsült kezdeti mez t x a = x b + K(y H(x b )) A meggyelések a K súly (gain) mátrix függvényében adnak hozzájárulásokat a rst guess-hez. K = BH T (HBH T + R) 1 A súlyfüggvény a B és R kovariancia mátrixok (megbízhatóság) kombinációjából áll. ( ) A = (I KH)B σa 2 = 1 σ2 b σo 2 + σb 2 σb 2 Az analízis hiba mindig kisebb a background hibánál, azaz a meggyelések mindig javítanak a rst guess-en!
38 Adatasszimilációs ciklus: BLUE + dinamikai modell Az analízis egyenlet: = x i b + K i (y i H(x i b )) K i = B i H T (HB i H T + R) 1 x a i Az id beli fejl dést leíró dinamikai egyenlet: x b i+1 = M(x a i ) M: a nem-lineáris modell operátor (Navier-Stokes egynlet diszkretizációja)
39 kék nyilak: a változónk id beli alakulása: x b = M(x a) y: meggyelések x b : a "background" (rst guess) x a: "analízis", vagyis a valós állapot (x t ) lehet legjobb becslése x b és y alapján
40 Megvalósítási problémák: optimális interpoláció x a = x b + K(y H(x b )) K = BH T (HBH T + R) 1 Probléma: invertálni kell a (HBH T + R) mátrixot a fenti mátrix dimenziója O(10 5 ) ekkora mátrix invertálása nagyon költséges lokális megoldás kis dimenzióban a globális megoldás a lokális megoldások együttese inkonzisztencia a határokon
41 Megvalósítási problémák: variációs módszer J(δx) = 1 2 δxt B 1 δx (d Hδx)T R 1 (d Hδx) ahol δx = x x b és d = y H(x b ). Probléma: x dimenziója nagy (10 7 ) a gradiens számolása nem triviális a gradiens soha nem lesz pontosan nulla iteratív keres (minimalizáló) algoritmusok használata (pl. konjugált gradiens)
42 Megvalósítási problémák: variációs módszer J(δx) = 1 2 δxt B 1 δx (d Hδx)T R 1 (d Hδx)
43 Észrevételek: a variációs módszer "globális" míg az optimális interpoláció "lokális" az optimális interpoláció csak lineáris meggyelési operátor esetén használható a variációs módszer nem követeli meg, hogy a meggyelési operátor lineáris legyen (az "outer loop"-ok lehet séget adnak a nem-lineáris kapcsolat gyelembevételére) példák nem-lineáris meggyelési operátorra: m holdas sugárzási értékek, radar reektivitás, GPS az új meggyelési technikák megkövetelik a variációs módszer használatát egy speciális példa nem-lineáris "meggyelési" operátorra amikor olyan meggyeléseket is felhasználunk, amelyek nem szigorúan az analízis id pontjára vonatkoznak, hanem egy ahhoz közeli id beli ablakban történnek: 3DVAR 4DVAR
44 3DVAR Egy adott id pillanatra vonatkozó "background"-ot javítjuk az aktuális meggyelésekkel Az analízis egy 3D-s mez : x a az állapotvektor egy adott id pillanatban H(x) egy adott id pontbeli interpoláció illetve transzformáció 4DVAR Egy id beli (4D) trajektóriát illesztünk egy adott id intervallumban (asszimilációs ablak) tett meggyelésekhez Az analízis egy trajektória: x a az állapotvektor id beli sorozata H(x) magában foglalja a dinamikus modell integrálását
45


46 Kármán Tódor: az els "National Medal of Science" t illette és J. F. Kenndy adta át neki 2017 November 17 Meteorológiai Adatasszimiláció
 így B = E(ɛ b ɛ T b ) is áramlás- (id járás)")
47 Az ɛ b background hiba áramlásfügg viselkedése (ALADIN modell, OMSZ) így B = E(ɛ b ɛ T b ) is áramlás- (id járás) függ!
48 Kérdés: milyen egyenlet írja le a B mátrix id beli fejl dését?
49 Kérdés: milyen egyenlet írja le a B mátrix id beli fejl dését? Emlékeztet : B i+1 = E(ɛ i+1 x b i+1 = M(x a i ) b ɛ i+1 T b )
50 Kérdés: milyen egyenlet írja le a B mátrix id beli fejl dését? Emlékeztet : B i+1 = E(ɛ i+1 x b i+1 = M(x a i ) b ɛ i+1 T b ) vezessük be a ɛ M modell hibát: ɛ i+1 M = x t i+1 M(x t i )
51 Emlékeztet : x b i+1 x t i+1 = M(x i a ) (1) = M(x i t ) + ɛ i+1 M (2)
52 Emlékeztet : (2) - (1): x b i+1 x t i+1 x t i+1 x b i+1 = M(x i a ) (1) = M(x i t ) + ɛ i+1 M (2) = M(x t i ) M(x a i ) + ɛ i+1 M M(x t i x a i ) + ɛ i+1 M ahol M = M x a tangens lineáris közelítése az M nem-lineáris modell operátornak.
53 Emlékeztet : (2) - (1): x b i+1 x t i+1 x t i+1 x b i+1 = M(x i a ) (1) = M(x i t ) + ɛ i+1 M (2) = M(x t i ) M(x a i ) + ɛ i+1 M M(x t i x a i ) + ɛ i+1 M ahol M = M x a tangens lineáris közelítése az M nem-lineáris modell operátornak. A hiba id beli fejl dését leíró dinamikai legynlet ɛ i+1 b Mɛ i a + ɛ i+1 M
54
55 Taylor sor: M(x a + δx) = M(x a ) + M x δx + 2 M x (δx)2 +...
56 Taylor sor: M(x a + δx) = M(x a ) + M x δx + 2 M x (δx) ahol δx = x t x a M(x t ) = M(x a ) + M x (x t x a ) + 2 M x (x t x a )
57 Taylor sor: M(x a + δx) = M(x a ) + M x δx + 2 M x (δx) ahol δx = x t x a M(x t ) = M(x a ) + M x (x t x a ) + 2 M x (x t x a ) ahol M x = M és mindent magasabb rend elhanyagolunk: M(x t ) M(x a ) M(x t x a )
58 Emlékeztet : B i+1 = E(ɛ i+1 b ɛ i+1 T b ) (3) ɛ i+1 b Mɛ i a + ɛ i+1 M (4)
59 Emlékeztet : B i+1 = E(ɛ i+1 b ɛ i+1 T b ) (3) ɛ i+1 b Mɛ i a + ɛ i+1 M (4) Behelyettesítve (4)-t (3)-be és a E(ɛ a ɛ M ) = 0 feltétellel: B i+1 E[(Mɛ i a + ɛ i+1 M )(Mɛi a + ɛ i+1 ME(ɛ i aɛ i T a )M T + E(ɛ i+1 M = MA i M T + Q i+1 M )T ] ɛi+1 T M )
60 Emlékeztet : B i+1 = E(ɛ i+1 b ɛ i+1 T b ) (3) ɛ i+1 b Mɛ i a + ɛ i+1 M (4) Behelyettesítve (4)-t (3)-be és a E(ɛ a ɛ M ) = 0 feltétellel: ahol Q i+1 = E(ɛ i+1 M B i+1 E[(Mɛ i a + ɛ i+1 M )(Mɛi a + ɛ i+1 ME(ɛ i aɛ i T a )M T + E(ɛ i+1 M = MA i M T + Q i+1 ɛi+1 M M )T ] ɛi+1 T M ) T ) a modell hiba kovariancia mátrix.
61 B id beli fejl dését leíró egyenlet B i+1 MA i M T + Q i+1 (5) egyenletek EKF=BLUE+(5)
62 egyenletek Az analízis egyenlet: = x i b + K i (y i H(x i b )) K i = B i H T (HB i H T + R) 1 x a i A i = (I K i H)B i Az id beli fejl dést leíró dinamikai egyenletek: x b i+1 = M(x a i ) B i+1 MA i M T + Q i+1
63 Mi a hozzáadtott értéke a BLUE-hoz? Mennyiben segít egy áramlásfügg B mátrix? Demo: nem-lineáris idealizált modell (Lorenz 63) δx δy δz δt = σ(y x) δt = x(ρ z) y δt = xy βz BLUE és EKF a Lorenz 63 modellel (Evensen 2009) Fortran kód elérhet :
64
65

66
67
68 Megvalósítási problémák: Egy légköri modellben B = MAM T + Q kiszámítása 2 N integrálást igényel a tangens lineáris és adjungált modellekkel. A tangens lineáris (M) és adjungált (M T ) kódok folyamatos extra "karbantartást" igényelnek mivel ezeket a nem-lineáris modell kód soronkénti deriválásával és transzponálásával nyerjük. Az A és B mátrixok dimenziója nagy (N N ) és a memóriában kell tárolni ket egyenletek megoldása során. A egyenleteket a tangens lineáris modell Taylor sorának másodrend nél nagyobb tagjai elhagyásával kapjuk. A tangens lineáris (és adjungált) közelítés javítható magasabb rend lezárással de ez tovább növeli a számítási költségeket. Ensemble (EnKF) (Evensen, 1994)
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 8 VIII. REGREssZIÓ 1. A REGREssZIÓs EGYENEs Két valószínűségi változó kapcsolatának leírására az eddigiek alapján vagy egy numerikus
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 8 VIII. REGREssZIÓ 1. A REGREssZIÓs EGYENEs Két valószínűségi változó kapcsolatának leírására az eddigiek alapján vagy egy numerikus
Véletlen jelenség: okok rendszere hozza létre - nem ismerhetjük mind, ezért sztochasztikus.
 Valószín ségelméleti és matematikai statisztikai alapfogalmak összefoglalása (Kemény Sándor - Deák András: Mérések tervezése és eredményeik értékelése, kivonat) Véletlen jelenség: okok rendszere hozza
Valószín ségelméleti és matematikai statisztikai alapfogalmak összefoglalása (Kemény Sándor - Deák András: Mérések tervezése és eredményeik értékelése, kivonat) Véletlen jelenség: okok rendszere hozza
Általánosan, bármilyen mérés annyit jelent, mint meghatározni, hányszor van meg
 LMeasurement.tex, March, 00 Mérés Általánosan, bármilyen mérés annyit jelent, mint meghatározni, hányszor van meg a mérendő mennyiségben egy másik, a mérendővel egynemű, önkényesen egységnek választott
LMeasurement.tex, March, 00 Mérés Általánosan, bármilyen mérés annyit jelent, mint meghatározni, hányszor van meg a mérendő mennyiségben egy másik, a mérendővel egynemű, önkényesen egységnek választott
Meteorológiai Tudományos Napok 2008 november Kullmann László
 AZ ALADIN NUMERIKUS ELŐREJELZŐ MODELL A RÖVIDTÁVÚ ELŐREJELZÉS SZOLGÁLATÁBAN Meteorológiai Tudományos Napok 2008 november 20-21. Kullmann László Tartalom ALADIN modell-család rövid ismertetése Operatív
AZ ALADIN NUMERIKUS ELŐREJELZŐ MODELL A RÖVIDTÁVÚ ELŐREJELZÉS SZOLGÁLATÁBAN Meteorológiai Tudományos Napok 2008 november 20-21. Kullmann László Tartalom ALADIN modell-család rövid ismertetése Operatív
LNM folytonos Az interpoláció Lagrange interpoláció. Lineáris algebra numerikus módszerei
 Legkisebb négyzetek módszere, folytonos eset Folytonos eset Legyen f C[a, b]és h(x) = a 1 φ 1 (x) + a 2 φ 2 (x) +... + a n φ n (x). Ekkor tehát az n 2 F (a 1,..., a n ) = f a i φ i = = b a i=1 f (x) 2
Legkisebb négyzetek módszere, folytonos eset Folytonos eset Legyen f C[a, b]és h(x) = a 1 φ 1 (x) + a 2 φ 2 (x) +... + a n φ n (x). Ekkor tehát az n 2 F (a 1,..., a n ) = f a i φ i = = b a i=1 f (x) 2
Leíró és matematikai statisztika el adásnapló Matematika alapszak, matematikai elemz szakirány 2016/2017. tavaszi félév
 Leíró és matematikai statisztika el adásnapló Matematika alapszak, matematikai elemz szakirány 2016/2017. tavaszi félév A pirossal írt anyagrészeket nem fogom közvetlenül számon kérni a vizsgán, azok háttérismeretként,
Leíró és matematikai statisztika el adásnapló Matematika alapszak, matematikai elemz szakirány 2016/2017. tavaszi félév A pirossal írt anyagrészeket nem fogom közvetlenül számon kérni a vizsgán, azok háttérismeretként,
A numerikus előrejelző modellek fejlesztése és alkalmazása az Országos Meteorológiai Szolgálatnál
 A numerikus előrejelző modellek fejlesztése és alkalmazása az Országos Meteorológiai Szolgálatnál HORÁNYI ANDRÁS Országos Meteorológiai Szolgálat 1 TARTALOM A numerikus modellezés alapjai Kategorikus és
A numerikus előrejelző modellek fejlesztése és alkalmazása az Országos Meteorológiai Szolgálatnál HORÁNYI ANDRÁS Országos Meteorológiai Szolgálat 1 TARTALOM A numerikus modellezés alapjai Kategorikus és
Legkisebb négyzetek módszere, Spline interpoláció
 Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
A MATEMATIKA NÉHÁNY KIHÍVÁSA
 A MATEMATIKA NÉHÁNY KIHÍVÁSA NAPJAINKBAN Simon L. Péter ELTE, Matematikai Intézet Alkalmazott Analízis és Számításmatematikai Tsz. 1 / 20 MATEMATIKA AZ ÉLET KÜLÖNBÖZŐ TERÜLETEIN Kaotikus sorozatok és differenciálegyenletek,
A MATEMATIKA NÉHÁNY KIHÍVÁSA NAPJAINKBAN Simon L. Péter ELTE, Matematikai Intézet Alkalmazott Analízis és Számításmatematikai Tsz. 1 / 20 MATEMATIKA AZ ÉLET KÜLÖNBÖZŐ TERÜLETEIN Kaotikus sorozatok és differenciálegyenletek,
Gyakorló feladatok. Agbeko Kwami Nutefe és Nagy Noémi
 Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Operatív AROME előrejelzések és GNSS ZTD adatasszimiláció az Országos Meteorológiai Szolgálatnál
 Operatív AROME előrejelzések és GNSS ZTD adatasszimiláció az Országos Meteorológiai Szolgálatnál Mile Máté Módszerfejlesztési Osztály (MO) OMSZ Tartalom Bevezetés, Numerikus előrejelzés és Adatasszimiláció
Operatív AROME előrejelzések és GNSS ZTD adatasszimiláció az Országos Meteorológiai Szolgálatnál Mile Máté Módszerfejlesztési Osztály (MO) OMSZ Tartalom Bevezetés, Numerikus előrejelzés és Adatasszimiláció
Line aris f uggv enyilleszt es m arcius 19.
 Lineáris függvényillesztés 2018. március 19. Illesztett paraméterek hibája Eddig azt néztük, hogy a mérési hiba hogyan propagál az illesztett paraméterekbe, ha van egy konkrét függvényünk. a hibaterjedés
Lineáris függvényillesztés 2018. március 19. Illesztett paraméterek hibája Eddig azt néztük, hogy a mérési hiba hogyan propagál az illesztett paraméterekbe, ha van egy konkrét függvényünk. a hibaterjedés
Ensemble előrejelzések: elméleti és gyakorlati háttér HÁGEL Edit Országos Meteorológiai Szolgálat Numerikus Modellező és Éghajlat-dinamikai Osztály 34
 Ensemble előrejelzések: elméleti és gyakorlati háttér HÁGEL Edit Országos Meteorológiai Szolgálat Numerikus Modellező és Éghajlat-dinamikai Osztály 34. Meteorológiai Tudományos Napok Az előadás vázlata
Ensemble előrejelzések: elméleti és gyakorlati háttér HÁGEL Edit Országos Meteorológiai Szolgálat Numerikus Modellező és Éghajlat-dinamikai Osztály 34. Meteorológiai Tudományos Napok Az előadás vázlata
Least Squares becslés
 Least Squares becslés A négyzetes hibafüggvény: i d i ( ) φx i A négyzetes hibafüggvény mellett a minimumot biztosító megoldás W=( d LS becslés A gradiens számítása és nullává tétele eredményeképp A megoldás
Least Squares becslés A négyzetes hibafüggvény: i d i ( ) φx i A négyzetes hibafüggvény mellett a minimumot biztosító megoldás W=( d LS becslés A gradiens számítása és nullává tétele eredményeképp A megoldás
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 9 IX. ROBUsZTUs statisztika 1. ROBUsZTUssÁG Az eddig kidolgozott módszerek főleg olyanok voltak, amelyek valamilyen értelemben optimálisak,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 9 IX. ROBUsZTUs statisztika 1. ROBUsZTUssÁG Az eddig kidolgozott módszerek főleg olyanok voltak, amelyek valamilyen értelemben optimálisak,
2015/16/1 Kvantummechanika B 2.ZH
 2015/16/1 Kvantummechanika B 2.ZH 2015. december 10. Információk 0. A ZH ideje minimum 90 perc, maximum 180 perc. 1. Az összesen elérhet pontszám 270 pont. 2. A jeles érdemjegy eléréséhez nem szükséges
2015/16/1 Kvantummechanika B 2.ZH 2015. december 10. Információk 0. A ZH ideje minimum 90 perc, maximum 180 perc. 1. Az összesen elérhet pontszám 270 pont. 2. A jeles érdemjegy eléréséhez nem szükséges
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
Tartalomjegyzék. Typotex Kiadó, 2010
 Tartalomjegyzék 15. Elliptikus egyenletek 7 15.1. Bevezetés: Elliptikus egyenletek alkalmazott feladatokban... 7 15.2. Elméleti háttér.......................... 9 15.3. Véges dierencia eljárások II...................
Tartalomjegyzék 15. Elliptikus egyenletek 7 15.1. Bevezetés: Elliptikus egyenletek alkalmazott feladatokban... 7 15.2. Elméleti háttér.......................... 9 15.3. Véges dierencia eljárások II...................
2. SZÉLSŽÉRTÉKSZÁMÍTÁS. 2.1 A széls érték fogalma, létezése
 2 SZÉLSŽÉRTÉKSZÁMÍTÁS DEFINÍCIÓ 21 A széls érték fogalma, létezése Azt mondjuk, hogy az f : D R k R függvénynek lokális (helyi) maximuma (minimuma) van az x 0 D pontban, ha van olyan ε > 0 hogy f(x 0 )
2 SZÉLSŽÉRTÉKSZÁMÍTÁS DEFINÍCIÓ 21 A széls érték fogalma, létezése Azt mondjuk, hogy az f : D R k R függvénynek lokális (helyi) maximuma (minimuma) van az x 0 D pontban, ha van olyan ε > 0 hogy f(x 0 )
REGIONÁLIS KLÍMAMODELLEZÉS AZ OMSZ-NÁL. Magyar Tudományos Akadémia szeptember 15. 1
 Regionális klímamodellezés az Országos Meteorológiai Szolgálatnál HORÁNYI ANDRÁS (horanyi.a@met.hu) Csima Gabriella, Szabó Péter, Szépszó Gabriella Országos Meteorológiai Szolgálat Numerikus Modellező
Regionális klímamodellezés az Országos Meteorológiai Szolgálatnál HORÁNYI ANDRÁS (horanyi.a@met.hu) Csima Gabriella, Szabó Péter, Szépszó Gabriella Országos Meteorológiai Szolgálat Numerikus Modellező
Gauss-Jordan módszer Legkisebb négyzetek módszere, egyenes LNM, polinom LNM, függvény. Lineáris algebra numerikus módszerei
 A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
5. előadás - Regressziószámítás
 5. előadás - Regressziószámítás 2016. október 3. 5. előadás 1 / 18 Kétváltozós eset A modell: Y i = α + βx i + u i, i = 1,..., T, ahol X i független u i -től minden i esetén, (u i ) pedig i.i.d. sorozat
5. előadás - Regressziószámítás 2016. október 3. 5. előadás 1 / 18 Kétváltozós eset A modell: Y i = α + βx i + u i, i = 1,..., T, ahol X i független u i -től minden i esetén, (u i ) pedig i.i.d. sorozat
2 (j) f(x) dx = 1 arcsin(3x 2) + C. (d) A x + Bx + C 5x (2x 2 + 7) + Hx + I. 2 2x F x + G. x
 f(x) dx = 1 arcsin(3x 2) + C. (d) A x + Bx + C 5x (2x 2 + 7) + Hx + I. 2 2x F x + G. x") I feladatsor Határozza meg az alábbi függvények határozatlan integrálját: a fx dx = x arctg + C b fx dx = arctgx + C c fx dx = 5/x 4 arctg 5 x + C d fx dx = arctg + C 5/ e fx dx = x + arctg + C f fx dx
I feladatsor Határozza meg az alábbi függvények határozatlan integrálját: a fx dx = x arctg + C b fx dx = arctgx + C c fx dx = 5/x 4 arctg 5 x + C d fx dx = arctg + C 5/ e fx dx = x + arctg + C f fx dx
Nagy számok törvényei Statisztikai mintavétel Várható érték becslése. Dr. Berta Miklós Fizika és Kémia Tanszék Széchenyi István Egyetem
 agy számok törvényei Statisztikai mintavétel Várható érték becslése Dr. Berta Miklós Fizika és Kémia Tanszék Széchenyi István Egyetem A mérés mint statisztikai mintavétel A méréssel az eloszlásfüggvénnyel
agy számok törvényei Statisztikai mintavétel Várható érték becslése Dr. Berta Miklós Fizika és Kémia Tanszék Széchenyi István Egyetem A mérés mint statisztikai mintavétel A méréssel az eloszlásfüggvénnyel
Biomatematika 12. Szent István Egyetem Állatorvos-tudományi Kar. Fodor János
 Szent István Egyetem Állatorvos-tudományi Kar Biomatematikai és Számítástechnikai Tanszék Biomatematika 12. Regresszió- és korrelációanaĺızis Fodor János Copyright c Fodor.Janos@aotk.szie.hu Last Revision
Szent István Egyetem Állatorvos-tudományi Kar Biomatematikai és Számítástechnikai Tanszék Biomatematika 12. Regresszió- és korrelációanaĺızis Fodor János Copyright c Fodor.Janos@aotk.szie.hu Last Revision
Numerikus módszerek 1.
 Numerikus módszerek 1. Tantárgy kódja: IP-08bNM1E, IP-08bNM1G (2+2) Az elsajátítandó ismeretanyag rövid leírása: A lebegıpontos számábrázolás egy modellje. A hibaszámítás elemei. Lineáris egyenletrendszerek
Numerikus módszerek 1. Tantárgy kódja: IP-08bNM1E, IP-08bNM1G (2+2) Az elsajátítandó ismeretanyag rövid leírása: A lebegıpontos számábrázolás egy modellje. A hibaszámítás elemei. Lineáris egyenletrendszerek
A mérési eredmény megadása
 A mérési eredmény megadása A mérés során kapott értékek eltérnek a mérendő fizikai mennyiség valódi értékétől. Alapvetően kétféle mérési hibát különböztetünk meg: a determinisztikus és a véletlenszerű
A mérési eredmény megadása A mérés során kapott értékek eltérnek a mérendő fizikai mennyiség valódi értékétől. Alapvetően kétféle mérési hibát különböztetünk meg: a determinisztikus és a véletlenszerű
Shor kvantum-algoritmusa diszkrét logaritmusra
 Ivanyos Gábor MTA SZTAKI Debrecen, 20 január 2. Tartalom és kvantum-áramkörök 2 A diszkrét log probléma Kvantum bit Állapot: a B = C 2 komplex euklideszi tér egy egységvektora: az a 0 + b szuperpozíció
Ivanyos Gábor MTA SZTAKI Debrecen, 20 január 2. Tartalom és kvantum-áramkörök 2 A diszkrét log probléma Kvantum bit Állapot: a B = C 2 komplex euklideszi tér egy egységvektora: az a 0 + b szuperpozíció
Gépi tanulás a gyakorlatban. Lineáris regresszió
 Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
A maximum likelihood becslésről
 A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
Regresszió. Csorba János. Nagyméretű adathalmazok kezelése március 31.
 Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Numerikus matematika. Irodalom: Stoyan Gisbert, Numerikus matematika mérnököknek és programozóknak, Typotex, Lebegőpontos számok
 Numerikus matematika Irodalom: Stoyan Gisbert, Numerikus matematika mérnököknek és programozóknak, Typotex, 2007 Lebegőpontos számok Normák, kondíciószámok Lineáris egyenletrendszerek Legkisebb négyzetes
Numerikus matematika Irodalom: Stoyan Gisbert, Numerikus matematika mérnököknek és programozóknak, Typotex, 2007 Lebegőpontos számok Normák, kondíciószámok Lineáris egyenletrendszerek Legkisebb négyzetes
Numerikus matematika vizsga
 1. Az a = 2, t = 4, k = 3, k + = 2 számábrázolási jellemzők mellett hány pozitív, normalizált lebegőpontos szám ábrázolható? Adja meg a legnagyobb ábrázolható számot! Mi lesz a 0.8-hoz rendelt lebegőpontos
1. Az a = 2, t = 4, k = 3, k + = 2 számábrázolási jellemzők mellett hány pozitív, normalizált lebegőpontos szám ábrázolható? Adja meg a legnagyobb ábrázolható számot! Mi lesz a 0.8-hoz rendelt lebegőpontos
1. Példa. A gamma függvény és a Fubini-tétel.
 . Példa. A gamma függvény és a Fubini-tétel.. Az x exp x + t )) függvény az x, t tartományon folytonos, és nem negatív, ezért alkalmazható rá a Fubini-tétel. I x exp x + t )) dxdt + t dt π 4. [ exp x +
. Példa. A gamma függvény és a Fubini-tétel.. Az x exp x + t )) függvény az x, t tartományon folytonos, és nem negatív, ezért alkalmazható rá a Fubini-tétel. I x exp x + t )) dxdt + t dt π 4. [ exp x +
Differenciálegyenletek numerikus integrálása április 9.
 Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Differenciálegyenletek numerikus integrálása 2018. április 9. Differenciálegyenletek Olyan egyenletek, ahol a megoldást függvény alakjában keressük az egyenletben a függvény és deriváltjai szerepelnek
Lagrange-féle multiplikátor módszer és alkalmazása
 Eötvös Loránd Tudományegyetem Természettudományi Kar Nemesné Jónás Nikolett Lagrange-féle multiplikátor módszer és alkalmazása Matematika BSc, Matematikai elemz szakirány Témavezet : Szekeres Béla János,
Eötvös Loránd Tudományegyetem Természettudományi Kar Nemesné Jónás Nikolett Lagrange-féle multiplikátor módszer és alkalmazása Matematika BSc, Matematikai elemz szakirány Témavezet : Szekeres Béla János,
Optimalizálás alapfeladata Legmeredekebb lejtő Lagrange függvény Log-barrier módszer Büntetőfüggvény módszer 2017/
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Feladatok megoldásokkal a 9. gyakorlathoz (Newton-Leibniz formula, közelítő integrálás, az integrálszámítás alkalmazásai 1.
 Feladatok megoldásokkal a 9. gyakorlathoz (Newton-Leibniz formula, közelítő integrálás, az integrálszámítás alkalmazásai.). Feladat. Határozzuk meg az alábbi integrálokat: a) x x + dx d) xe x dx b) c)
Feladatok megoldásokkal a 9. gyakorlathoz (Newton-Leibniz formula, közelítő integrálás, az integrálszámítás alkalmazásai.). Feladat. Határozzuk meg az alábbi integrálokat: a) x x + dx d) xe x dx b) c)
AZ ID JÁRÁS SZÁMÍTÓGÉPES EL REJELZÉSE. rejelzése. horanyi.a@met.hu) lat. Földtudományos forgatag. 2008. április 19.
 lat. Földtudományos forgatag. 2008. április 19.") Az z idjárási számítógépes elrejelz rejelzése HORÁNYI ANDRÁS S (horanyi.a@met.hu( horanyi.a@met.hu) Országos Meteorológiai Szolgálat lat Numerikus Modellez és Éghajlat-dinamikai Osztály (NMO) 1 MIÉRT FONTOS?
Az z idjárási számítógépes elrejelz rejelzése HORÁNYI ANDRÁS S (horanyi.a@met.hu( horanyi.a@met.hu) Országos Meteorológiai Szolgálat lat Numerikus Modellez és Éghajlat-dinamikai Osztály (NMO) 1 MIÉRT FONTOS?
Bevezetés az állapottér-elméletbe Dinamikus rendszerek állapottér reprezentációi
 Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Tartalom Bevezetés az állapottér-elméletbe Irányítható alak Megfigyelhetőségi alak Diagonális alak Állapottér transzformáció 2018 1 A szabályozáselmélet klasszikus, BODE, NICHOLS, NYQUIST nevéhez kötődő,
Végeselem modellezés alapjai 1. óra
 Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Matematikai geodéziai számítások 5.
 Matematikai geodéziai számítások 5 Hibaterjedési feladatok Dr Bácsatyai László Matematikai geodéziai számítások 5: Hibaterjedési feladatok Dr Bácsatyai László Lektor: Dr Benedek Judit Ez a modul a TÁMOP
Matematikai geodéziai számítások 5 Hibaterjedési feladatok Dr Bácsatyai László Matematikai geodéziai számítások 5: Hibaterjedési feladatok Dr Bácsatyai László Lektor: Dr Benedek Judit Ez a modul a TÁMOP
Nemlineáris egyenletrendszerek megoldása április 15.
 Nemlineáris egyenletrendszerek megoldása 2014. április 15. Nemlineáris egyenletrendszerek Az egyenletrendszer a következő formában adott: f i (x 1, x 2,..., x M ) = 0 i = 1...N az f i függvények az x j
Nemlineáris egyenletrendszerek megoldása 2014. április 15. Nemlineáris egyenletrendszerek Az egyenletrendszer a következő formában adott: f i (x 1, x 2,..., x M ) = 0 i = 1...N az f i függvények az x j
Differenciálegyenletek numerikus megoldása
 a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
a Matematika mérnököknek II. című tárgyhoz Differenciálegyenletek numerikus megoldása Fokozatos közeĺıtés módszere (1) (2) x (t) = f (t, x(t)), x I, x(ξ) = η. Az (1)-(2) kezdeti érték probléma ekvivalens
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
n n (n n ), lim ln(2 + 3e x ) x 3 + 2x 2e x e x + 1, sin x 1 cos x, lim e x2 1 + x 2 lim sin x 1 )
, lim ln(2 + 3e x ) x 3 + 2x 2e x e x + 1, sin x 1 cos x, lim e x2 1 + x 2 lim sin x 1 )") Matek szigorlat Komplex számok Sorozat határérték., a legnagyobb taggal egyszerűsítünk n n 3 3n 2 + 2 3n 2 n n + 2 25 n 3 9 n 2 + + 3) 2n 8 n 3 2n 3,, n n5 + n 2 n 2 5 2n + 2 3n 2) n+ 2. e-ados: + a )
Matek szigorlat Komplex számok Sorozat határérték., a legnagyobb taggal egyszerűsítünk n n 3 3n 2 + 2 3n 2 n n + 2 25 n 3 9 n 2 + + 3) 2n 8 n 3 2n 3,, n n5 + n 2 n 2 5 2n + 2 3n 2) n+ 2. e-ados: + a )
Konjugált gradiens módszer
 Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Mátrixhatvány-vektor szorzatok hatékony számítása
 Mátrixhatvány-vektor szorzatok hatékony számítása Izsák Ferenc ELTE TTK, Alkalmazott Analízis és Számításmatematikai Tanszék & ELTE-MTA NumNet Kutatócsoport munkatárs: Szekeres Béla János Alkalmazott Analízis
Mátrixhatvány-vektor szorzatok hatékony számítása Izsák Ferenc ELTE TTK, Alkalmazott Analízis és Számításmatematikai Tanszék & ELTE-MTA NumNet Kutatócsoport munkatárs: Szekeres Béla János Alkalmazott Analízis
(Az Alkalmazott számszerű előrejelzés című elektronikus jegyzet II. fejezete) Szépszó Gabriella, Bölöni Gergely, Horányi András, Szűcs Mihály
 Szépszó Gabriella, Bölöni Gergely, Horányi András, Szűcs Mihály") A numerikus időjárási modellek felépítése: tér- és időskála, adatasszimiláció, diszkretizáció, parametrizációk, valószínűségi előrejelzések, éghajlati modellezés (Az Alkalmazott számszerű előrejelzés című
A numerikus időjárási modellek felépítése: tér- és időskála, adatasszimiláció, diszkretizáció, parametrizációk, valószínűségi előrejelzések, éghajlati modellezés (Az Alkalmazott számszerű előrejelzés című
Statisztikai következtetések Nemlineáris regresszió Feladatok Vége
 [GVMGS11MNC] Gazdaságstatisztika 10. előadás: 9. Regressziószámítás II. Kóczy Á. László koczy.laszlo@kgk.uni-obuda.hu Keleti Károly Gazdasági Kar Vállalkozásmenedzsment Intézet A standard lineáris modell
[GVMGS11MNC] Gazdaságstatisztika 10. előadás: 9. Regressziószámítás II. Kóczy Á. László koczy.laszlo@kgk.uni-obuda.hu Keleti Károly Gazdasági Kar Vállalkozásmenedzsment Intézet A standard lineáris modell
A lineáris programozás alapjai
 A lineáris programozás alapjai A konvex analízis alapjai: konvexitás, konvex kombináció, hipersíkok, félterek, extrém pontok, Poliéderek, a Minkowski-Weyl tétel (a poliéderek reprezentációs tétele) Lineáris
A lineáris programozás alapjai A konvex analízis alapjai: konvexitás, konvex kombináció, hipersíkok, félterek, extrém pontok, Poliéderek, a Minkowski-Weyl tétel (a poliéderek reprezentációs tétele) Lineáris
felhasználása a numerikus
 Megfigyelések és mérések felhasználása a numerikus előrejelzésekben Bölöni Gergely, Mile Máté, Roger Randriamampianina, Steib Roland, Tóth Helga, Horváth Ákos, Nagy Attila Motiváció Verifikációs ió analízis
Megfigyelések és mérések felhasználása a numerikus előrejelzésekben Bölöni Gergely, Mile Máté, Roger Randriamampianina, Steib Roland, Tóth Helga, Horváth Ákos, Nagy Attila Motiváció Verifikációs ió analízis
Lineáris regressziós modellek 1
 Lineáris regressziós modellek 1 Ispány Márton és Jeszenszky Péter 2016. szeptember 19. 1 Az ábrák C.M. Bishop: Pattern Recognition and Machine Learning c. könyvéből származnak. Tartalom Bevezető példák
Lineáris regressziós modellek 1 Ispány Márton és Jeszenszky Péter 2016. szeptember 19. 1 Az ábrák C.M. Bishop: Pattern Recognition and Machine Learning c. könyvéből származnak. Tartalom Bevezető példák
Statisztika I. 12. előadás. Előadó: Dr. Ertsey Imre
 Statisztika I. 1. előadás Előadó: Dr. Ertsey Imre Regresszió analízis A korrelációs együttható megmutatja a kapcsolat irányát és szorosságát. A kapcsolat vizsgálata során a gyakorlatban ennél messzebb
Statisztika I. 1. előadás Előadó: Dr. Ertsey Imre Regresszió analízis A korrelációs együttható megmutatja a kapcsolat irányát és szorosságát. A kapcsolat vizsgálata során a gyakorlatban ennél messzebb
Az éghajlati modellek eredményeinek alkalmazhatósága hatásvizsgálatokban
 Az éghajlati modellek eredményeinek alkalmazhatósága hatásvizsgálatokban Szépszó Gabriella Országos Meteorológiai Szolgálat, szepszo.g@met.hu RCMTéR hatásvizsgálói konzultációs workshop 2015. június 23.
Az éghajlati modellek eredményeinek alkalmazhatósága hatásvizsgálatokban Szépszó Gabriella Országos Meteorológiai Szolgálat, szepszo.g@met.hu RCMTéR hatásvizsgálói konzultációs workshop 2015. június 23.
y = y 0 exp (ax) Y (x) = exp (Ax)Y 0 A n x n 1 (n 1)! = A I + d exp (Ax) = A exp (Ax) exp (Ax)
 Y (x) = exp (Ax)Y 0 A n x n 1 (n 1)! = A I + d exp (Ax) = A exp (Ax) exp (Ax)") III Az exp (Ax mátrixfüggvény módszere Ha y = ay, y( = y, a = állandó y = y exp (ax d dx [exp (Ax] = Y = AY, Y ( = Y, Y (x = exp (AxY exp (Ax = I + n= A n x n (n! = A A n x n, n! ] A n x n I + = A exp
III Az exp (Ax mátrixfüggvény módszere Ha y = ay, y( = y, a = állandó y = y exp (ax d dx [exp (Ax] = Y = AY, Y ( = Y, Y (x = exp (AxY exp (Ax = I + n= A n x n (n! = A A n x n, n! ] A n x n I + = A exp
YBL - SGYMMAT2012XA Matematika II.
 YBL - SGYMMAT2012XA Matematika II. Tantárgyfelelős: Dr. Joós Antal Tárgyelőadó: Dr. Joós Antal Tantárgyi leírás Oktatási cél: Azoknak a matematikai alapoknak a megszerzése, melyek a szaktárgyak elsajátításához
YBL - SGYMMAT2012XA Matematika II. Tantárgyfelelős: Dr. Joós Antal Tárgyelőadó: Dr. Joós Antal Tantárgyi leírás Oktatási cél: Azoknak a matematikai alapoknak a megszerzése, melyek a szaktárgyak elsajátításához
Bevezetés az időjárás és az éghajlat numerikus (számszerű) előrejelzésébe
 előrejelzésébe") Bevezetés az időjárás és az éghajlat numerikus (számszerű) előrejelzésébe Szépszó Gabriella szepszo.g@met.hu Korábbi előadó: Horányi András Előadások anyaga: http://nimbus.elte.hu/~numelo Az előadás vázlata
Bevezetés az időjárás és az éghajlat numerikus (számszerű) előrejelzésébe Szépszó Gabriella szepszo.g@met.hu Korábbi előadó: Horányi András Előadások anyaga: http://nimbus.elte.hu/~numelo Az előadás vázlata
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
4/24/12. Regresszióanalízis. Legkisebb négyzetek elve. Regresszióanalízis
 1. feladat Regresszióanalízis. Legkisebb négyzetek elve 2. feladat Az iskola egy évfolyamába tartozó diákok átlagéletkora 15,8 év, standard deviációja 0,6 év. A 625 fős évfolyamból hány diák fiatalabb
1. feladat Regresszióanalízis. Legkisebb négyzetek elve 2. feladat Az iskola egy évfolyamába tartozó diákok átlagéletkora 15,8 év, standard deviációja 0,6 év. A 625 fős évfolyamból hány diák fiatalabb
Ipari matematika 2. gyakorlófeladatok
 Ipari matematika. gyakorlófeladatok. december 5. A feladatok megoldása általában többféle úton is kiszámítató. Interpoláció a. Polinom-interpoláció segítségével adjunk közelítést sin π értékére a sin =,
Ipari matematika. gyakorlófeladatok. december 5. A feladatok megoldása általában többféle úton is kiszámítató. Interpoláció a. Polinom-interpoláció segítségével adjunk közelítést sin π értékére a sin =,
Numerikus módszerek. 9. előadás
 Numerikus módszerek 9. előadás Differenciálegyenletek integrálási módszerei x k dx k dt = f x,t; k k ' k, k '=1,2,... M FELADAT: meghatározni x k t n x k, n egyenletes időlépés??? t n =t 0 n JELÖLÉS: f
Numerikus módszerek 9. előadás Differenciálegyenletek integrálási módszerei x k dx k dt = f x,t; k k ' k, k '=1,2,... M FELADAT: meghatározni x k t n x k, n egyenletes időlépés??? t n =t 0 n JELÖLÉS: f
Miért fontos számunkra az előző gyakorlaton tárgyalt lineáris algebrai ismeretek
 Az november 23-i szeminárium témája Rövid összefoglaló Miért fontos számunkra az előző gyakorlaton tárgyalt lineáris algebrai ismeretek felfrissítése? Tekintsünk ξ 1,..., ξ k valószínűségi változókat,
Az november 23-i szeminárium témája Rövid összefoglaló Miért fontos számunkra az előző gyakorlaton tárgyalt lineáris algebrai ismeretek felfrissítése? Tekintsünk ξ 1,..., ξ k valószínűségi változókat,
Elméleti összefoglaló a Valószín ségszámítás kurzushoz
 Elméleti összefoglaló a Valószín ségszámítás kurzushoz Véletlen kísérletek, események valószín sége Deníció. Egy véletlen kísérlet lehetséges eredményeit kimeneteleknek nevezzük. A kísérlet kimeneteleinek
Elméleti összefoglaló a Valószín ségszámítás kurzushoz Véletlen kísérletek, események valószín sége Deníció. Egy véletlen kísérlet lehetséges eredményeit kimeneteleknek nevezzük. A kísérlet kimeneteleinek
Bevezetés az állapottér elméletbe: Állapottér reprezentációk
 Tartalom Bevezetés az állapottér elméletbe: Állapottér reprezentációk vizsgálata 1. Példa az állapottér reprezentációk megválasztására 2. Átviteli függvény és állapottér reprezentációk közötti kapcsolatok
Tartalom Bevezetés az állapottér elméletbe: Állapottér reprezentációk vizsgálata 1. Példa az állapottér reprezentációk megválasztására 2. Átviteli függvény és állapottér reprezentációk közötti kapcsolatok
A Richardson-extrapoláció és alkalmazása a Dániai Euleri Modellben
 A Richardson-extrapoláció és alkalmazása a Dániai Euleri Modellben Faragó István 1, Havasi Ágnes 1, Zahari Zlatev 2 1 ELTE Alkalmazott Analízis és Számításmatematikai Tanszék és MTA-ELTE Numerikus Analízis
A Richardson-extrapoláció és alkalmazása a Dániai Euleri Modellben Faragó István 1, Havasi Ágnes 1, Zahari Zlatev 2 1 ELTE Alkalmazott Analízis és Számításmatematikai Tanszék és MTA-ELTE Numerikus Analízis
Elméleti összefoglaló a Sztochasztika alapjai kurzushoz
 Elméleti összefoglaló a Sztochasztika alapjai kurzushoz 1. dolgozat Véletlen kísérletek, események valószín sége Deníció. Egy véletlen kísérlet lehetséges eredményeit kimeneteleknek nevezzük. A kísérlet
Elméleti összefoglaló a Sztochasztika alapjai kurzushoz 1. dolgozat Véletlen kísérletek, események valószín sége Deníció. Egy véletlen kísérlet lehetséges eredményeit kimeneteleknek nevezzük. A kísérlet
Számítógépes döntéstámogatás. Statisztikai elemzés
 SZDT-03 p. 1/22 Számítógépes döntéstámogatás Statisztikai elemzés Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu Előadás SZDT-03 p. 2/22 Rendelkezésre
SZDT-03 p. 1/22 Számítógépes döntéstámogatás Statisztikai elemzés Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu Előadás SZDT-03 p. 2/22 Rendelkezésre
Megoldott feladatok november 30. n+3 szigorúan monoton csökken, 5. n+3. lim a n = lim. n+3 = 2n+3 n+4 2n+1
 Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
1. Parciális függvény, parciális derivált (ismétlés)
") Operációkutatás NYME Gazdaságinformatikus mesterképzés El adó: Kalmár János (kalmar[kukac]inf.nyme.hu) Többváltozós széls érték számítás Parciális függvény, parciális derivált Széls érték korlátos zárt
Operációkutatás NYME Gazdaságinformatikus mesterképzés El adó: Kalmár János (kalmar[kukac]inf.nyme.hu) Többváltozós széls érték számítás Parciális függvény, parciális derivált Széls érték korlátos zárt
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Differenciálhatóság H607, EIC 2019-03-14 Wettl
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Differenciálhatóság H607, EIC 2019-03-14 Wettl
1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1
![1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1](/thumbs/88/116339870.jpg "1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1") numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
Véletlen bolyongás. Márkus László március 17. Márkus László Véletlen bolyongás március / 31
 Márkus László Véletlen bolyongás 2015. március 17. 1 / 31 Véletlen bolyongás Márkus László 2015. március 17. Modell Deníció Márkus László Véletlen bolyongás 2015. március 17. 2 / 31 Modell: Egy egyenesen
Márkus László Véletlen bolyongás 2015. március 17. 1 / 31 Véletlen bolyongás Márkus László 2015. március 17. Modell Deníció Márkus László Véletlen bolyongás 2015. március 17. 2 / 31 Modell: Egy egyenesen
Principal Component Analysis
 Principal Component Analysis Principal Component Analysis Principal Component Analysis Definíció Ortogonális transzformáció, amely az adatokat egy új koordinátarendszerbe transzformálja úgy, hogy a koordináták
Principal Component Analysis Principal Component Analysis Principal Component Analysis Definíció Ortogonális transzformáció, amely az adatokat egy új koordinátarendszerbe transzformálja úgy, hogy a koordináták
Az INTRO projekt. Troposzféra modellek integritásvizsgálata. Rédey szeminárium Ambrus Bence
 Az INTRO projekt Troposzféra modellek integritásvizsgálata Rédey szeminárium Ambrus Bence A projekt leírása Célkitűzés: troposzféra modellek maradék hibáinak modellezése, a modellek integritásának vizsgálata
Az INTRO projekt Troposzféra modellek integritásvizsgálata Rédey szeminárium Ambrus Bence A projekt leírása Célkitűzés: troposzféra modellek maradék hibáinak modellezése, a modellek integritásának vizsgálata
Kétváltozós függvények differenciálszámítása
 Kétváltozós függvények differenciálszámítása 13. előadás Farkas István DE ATC Gazdaságelemzési és Statisztikai Tanszék Kétváltozós függvények p. 1/1 Definíció, szemléltetés Definíció. Az f : R R R függvényt
Kétváltozós függvények differenciálszámítása 13. előadás Farkas István DE ATC Gazdaságelemzési és Statisztikai Tanszék Kétváltozós függvények p. 1/1 Definíció, szemléltetés Definíció. Az f : R R R függvényt
Parciális dierenciálegyenletek
 Parciális dierenciálegyenletek 2009. május 25. A félév lezárásaként néhány alap-deníciót és alap-példát szeretnék adni a Parciális Dierenciálegynletek (PDE) témaköréb l. Épp csak egy kis izelít t. Az alapfeladatok
Parciális dierenciálegyenletek 2009. május 25. A félév lezárásaként néhány alap-deníciót és alap-példát szeretnék adni a Parciális Dierenciálegynletek (PDE) témaköréb l. Épp csak egy kis izelít t. Az alapfeladatok
Boros Zoltán február
 Többváltozós függvények differenciál- és integrálszámítása (2 3. előadás) Boros Zoltán 209. február 9 26.. Vektorváltozós függvények differenciálhatósága és iránymenti deriváltjai A továbbiakban D R n
Többváltozós függvények differenciál- és integrálszámítása (2 3. előadás) Boros Zoltán 209. február 9 26.. Vektorváltozós függvények differenciálhatósága és iránymenti deriváltjai A továbbiakban D R n
Matematikai geodéziai számítások 5.
 Nyugat-magyarországi Egyetem Geoinformatikai Kara Dr Bácsatyai László Matematikai geodéziai számítások 5 MGS5 modul Hibaterjedési feladatok SZÉKESFEHÉRVÁR 2010 Jelen szellemi terméket a szerzői jogról
Nyugat-magyarországi Egyetem Geoinformatikai Kara Dr Bácsatyai László Matematikai geodéziai számítások 5 MGS5 modul Hibaterjedési feladatok SZÉKESFEHÉRVÁR 2010 Jelen szellemi terméket a szerzői jogról
Statisztika elméleti összefoglaló
 1 Statisztika elméleti összefoglaló Tel.: 0/453-91-78 1. Tartalomjegyzék 1. Tartalomjegyzék.... Becsléselmélet... 3 3. Intervallumbecslések... 5 4. Hipotézisvizsgálat... 8 5. Regresszió-számítás... 11
1 Statisztika elméleti összefoglaló Tel.: 0/453-91-78 1. Tartalomjegyzék 1. Tartalomjegyzék.... Becsléselmélet... 3 3. Intervallumbecslések... 5 4. Hipotézisvizsgálat... 8 5. Regresszió-számítás... 11
Norma Determináns, inverz Kondíciószám Direkt és inverz hibák Lin. egyenletrendszerek A Gauss-módszer. Lineáris algebra numerikus módszerei
 Indukált mátrixnorma Definíció A. M : R n n R mátrixnormát a. V : R n R vektornorma által indukált mátrixnormának nevezzük, ha A M = max { Ax V : x V = 1}. Az indukált mátrixnorma geometriai jelentése:
Indukált mátrixnorma Definíció A. M : R n n R mátrixnormát a. V : R n R vektornorma által indukált mátrixnormának nevezzük, ha A M = max { Ax V : x V = 1}. Az indukált mátrixnorma geometriai jelentése:
Biometria az orvosi gyakorlatban. Korrelációszámítás, regresszió
 SZDT-08 p. 1/31 Biometria az orvosi gyakorlatban Korrelációszámítás, regresszió Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu Korrelációszámítás
SZDT-08 p. 1/31 Biometria az orvosi gyakorlatban Korrelációszámítás, regresszió Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu Korrelációszámítás
Matematikai statisztika I. témakör: Valószínűségszámítási ismétlés
 Matematikai statisztika I. témakör: Valószínűségszámítási ismétlés Elek Péter 1. Valószínűségi változók és eloszlások 1.1. Egyváltozós eset Ismétlés: valószínűség fogalma Valószínűségekre vonatkozó axiómák
Matematikai statisztika I. témakör: Valószínűségszámítási ismétlés Elek Péter 1. Valószínűségi változók és eloszlások 1.1. Egyváltozós eset Ismétlés: valószínűség fogalma Valószínűségekre vonatkozó axiómák
Kvantummechanika gyakorlat Beadandó feladatsor Határid : 4. heti gyakorlatok eleje
 Kvantummechanika gyakorlat 015 1. Beadandó feladatsor Határid : 4. heti gyakorlatok eleje 1. Mutassuk meg, hogy A és B tetsz leges operátorokra igaz, hogy e B A e B = A + [B, A] + 1![ B, [B, A] ] +....
Kvantummechanika gyakorlat 015 1. Beadandó feladatsor Határid : 4. heti gyakorlatok eleje 1. Mutassuk meg, hogy A és B tetsz leges operátorokra igaz, hogy e B A e B = A + [B, A] + 1![ B, [B, A] ] +....
Feladatok megoldásokkal az ötödik gyakorlathoz (Taylor polinom, szöveges szélsőérték problémák)
") Feladatok megoldásokkal az ötödik gyakorlathoz Taylor polinom, szöveges szélsőérték problémák) 1. Feladat. Írjuk fel az fx) = e x függvény a = 0 pont körüli negyedfokú Taylor polinomját! Ennek segítségével
Feladatok megoldásokkal az ötödik gyakorlathoz Taylor polinom, szöveges szélsőérték problémák) 1. Feladat. Írjuk fel az fx) = e x függvény a = 0 pont körüli negyedfokú Taylor polinomját! Ennek segítségével
Statikailag határozatlan tartó vizsgálata
 Statikailag határozatlan tartó vizsgálata Készítette: Hénap Gábor henapg@mm.bme.hu E E P MT A y F D E E d B MT p C x a b c Adatok: a = m, p = 1 N, b = 3 m, F = 5 N, c = 4 m, d = 5 mm. m A kés bbikekben
Statikailag határozatlan tartó vizsgálata Készítette: Hénap Gábor henapg@mm.bme.hu E E P MT A y F D E E d B MT p C x a b c Adatok: a = m, p = 1 N, b = 3 m, F = 5 N, c = 4 m, d = 5 mm. m A kés bbikekben
Gazdasági matematika II. vizsgadolgozat megoldása, június 10
 Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Numerikus módszerek II. zárthelyi dolgozat, megoldások, 2014/15. I. félév, A. csoport. x 2. c = 3 5, s = 4
 Numerikus módszerek II. zárthelyi dolgozat, megoldások, 204/5. I. félév, A. csoport. Feladat. (6p) Alkalmas módon választva egy Givens-forgatást, határozzuk meg az A mátrix QR-felbontását! Oldjuk meg ennek
Numerikus módszerek II. zárthelyi dolgozat, megoldások, 204/5. I. félév, A. csoport. Feladat. (6p) Alkalmas módon választva egy Givens-forgatást, határozzuk meg az A mátrix QR-felbontását! Oldjuk meg ennek
Csomós Petra. Loránd Tudományegyetem, Budapest. függvénytan, valós és komplex vonalintegrál)
") Oktatási és témavezetői tevékenység Csomós Petra 1. Oktatás 2001.09 12. 2003.09 12. 2001.02 06. 2003.02 06. 2002.09 12. 2004.09 12. 2003.02 06. 2005.02 06. Analízis I. gyakorlat meteorológus és geofizikus
Oktatási és témavezetői tevékenység Csomós Petra 1. Oktatás 2001.09 12. 2003.09 12. 2001.02 06. 2003.02 06. 2002.09 12. 2004.09 12. 2003.02 06. 2005.02 06. Analízis I. gyakorlat meteorológus és geofizikus
A fontosabb definíciók
 A legfontosabb definíciókat jelöli. A fontosabb definíciók [Descartes szorzat] Az A és B halmazok Descartes szorzatán az A és B elemeiből képezett összes (a, b) a A, b B rendezett párok halmazát értjük,
A legfontosabb definíciókat jelöli. A fontosabb definíciók [Descartes szorzat] Az A és B halmazok Descartes szorzatán az A és B elemeiből képezett összes (a, b) a A, b B rendezett párok halmazát értjük,
Abszolút folytonos valószín ségi változó (4. el adás)
") Abszolút folytonos valószín ségi változó (4. el adás) Deníció (Abszolút folytonosság és s r ségfüggvény) Az X valószín ségi változó abszolút folytonos, ha van olyan f : R R függvény, melyre P(X t) = t
Abszolút folytonos valószín ségi változó (4. el adás) Deníció (Abszolút folytonosság és s r ségfüggvény) Az X valószín ségi változó abszolút folytonos, ha van olyan f : R R függvény, melyre P(X t) = t
Nagyfelbontású magassági szélklimatológiai információk dinamikai elıállítása
 Nagyfelbontású magassági szélklimatológiai információk dinamikai elıállítása Szépszó Gabriella Országos Meteorológiai Szolgálat Éghajlati Osztály, Klímamodellezı Csoport Együttmőködési lehetıségek a hidrodinamikai
Nagyfelbontású magassági szélklimatológiai információk dinamikai elıállítása Szépszó Gabriella Országos Meteorológiai Szolgálat Éghajlati Osztály, Klímamodellezı Csoport Együttmőködési lehetıségek a hidrodinamikai
Lagrange és Hamilton mechanika
 Lagrange és 2010. október 17. Lagrange és Tartalom 1 Variáció Lagrange egyenlet Legendre transzformáció Hamilton egyenletek 2 3 Szimplektikus sokaság Hamilton mez Hamilton és Lagrange egyenletek ekvivalenciája
Lagrange és 2010. október 17. Lagrange és Tartalom 1 Variáció Lagrange egyenlet Legendre transzformáció Hamilton egyenletek 2 3 Szimplektikus sokaság Hamilton mez Hamilton és Lagrange egyenletek ekvivalenciája
Regressziós vizsgálatok
 Regressziós vizsgálatok Regresszió (regression) Általános jelentése: visszaesés, hanyatlás, visszafelé mozgás, visszavezetés. Orvosi területen: visszafejlődés, involúció. A betegség tünetei, vagy maga
Regressziós vizsgálatok Regresszió (regression) Általános jelentése: visszaesés, hanyatlás, visszafelé mozgás, visszavezetés. Orvosi területen: visszafejlődés, involúció. A betegség tünetei, vagy maga
BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011.
 BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011. 1 Mérési hibák súlya és szerepe a mérési eredményben A mérési hibák csoportosítása A hiba rendűsége Mérési bizonytalanság Standard és kiterjesztett
BAGME11NNF Munkavédelmi mérnökasszisztens Galla Jánosné, 2011. 1 Mérési hibák súlya és szerepe a mérési eredményben A mérési hibák csoportosítása A hiba rendűsége Mérési bizonytalanság Standard és kiterjesztett
Opkut deníciók és tételek
 Opkut deníciók és tételek Készítette: Bán József Deníciók 1. Deníció (Lineáris programozási feladat). Keressük meg adott lineáris, R n értelmezési tartományú függvény, az ún. célfüggvény széls értékét
Opkut deníciók és tételek Készítette: Bán József Deníciók 1. Deníció (Lineáris programozási feladat). Keressük meg adott lineáris, R n értelmezési tartományú függvény, az ún. célfüggvény széls értékét
Matematikai statisztika szorgalmi feladatok
 Matematikai statisztika szorgalmi feladatok 1. Feltételes várható érték és konvolúció 1. Legyen X és Y független és azonos eloszlású valószín ségi változó véges második momentummal. Mutassuk meg, hogy
Matematikai statisztika szorgalmi feladatok 1. Feltételes várható érték és konvolúció 1. Legyen X és Y független és azonos eloszlású valószín ségi változó véges második momentummal. Mutassuk meg, hogy
Nemlineáris programozás 2.
 Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,