Robotika. A robotok története - bevezetés. Magyar Attila amagyar@almos.vein.hu
|
|
|
- Tibor Katona
- 8 évvel ezelőtt
- Látták:
Átírás
1 Robotika A robotok története - bevezetés Magyar Attila amagyar@almos.vein.hu

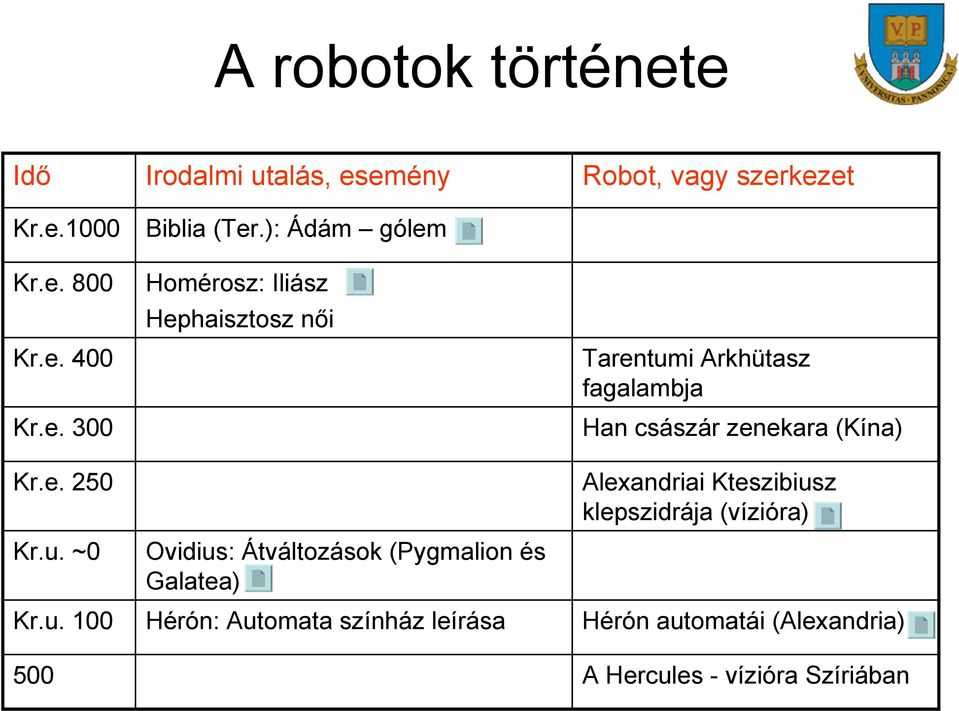
2 A robotok története Idő Irodalmi utalás, esemény Robot, vagy szerkezet Kr.e.1000 Kr.e. 800 Kr.e. 400 Kr.e. 300 Biblia (Ter.): Ádám gólem Homérosz: Iliász Hephaisztosz női Tarentumi Arkhütasz fagalambja Han császár zenekara (Kína) Kr.e. 250 Kr.u. ~0 Ovidius: Átváltozások (Pygmalion és Galatea) Alexandriai Kteszibiusz klepszidrája (vízióra) Kr.u. 100 Hérón: Automata színház leírása Hérón automatái (Alexandria) 500 A Hercules - vízióra Szíriában
3 A robotok története Idő Irodalmi utalás, esemény Robot, vagy szerkezet 1235 Villard de Honnecourt repülő sas 1242 Möngke kán szökőkútja (Guillaume Boucher) 1250 Albertus Magnus gépinasa (android) 1260 Roger Bacon beszélő feje 1450 Regiomontanus: műlégy, repülő sas 1510 Leonardo da Vinci repüléstanulmányok 1540 Leonardo da Vinci madármodellje 1690 Zevi Hirsch ben Jacob Ashkenazi - Gólem

4 Robotika Kulturális gyökerek Robotika 3 alaptörvénye (Isaac Asimov): 1. A robotnak nem szabad kárt okoznia emberi lényben vagy tétlenül tűrnie, hogy emberi lény bármilyen kárt szenvedjen. 2. A robot engedelmeskedni tartozik az emberi lények utasításainak, kivéve, ha ezek az utasítások az első törvény előírásaiba ütköznének. 3. A robot tartozik saját védelméről gondoskodni, amennyiben ez nem ütközik az első és a második törvény előírásaiba. Robot: teljesen független gép, amely képes megváltoztatni a környezetet, amelyben működik. Robotika: érzékelés és az akció intelligens kapcsolata

5 Robotika Mechanikai rendszer - az akciót megvalósító részrendszer Helyváltoztató berendezés mozgás a környezetben Manipulációs berendezés környezetbeli objektumokkal való operálás (mechanika, anyagtudomány, beavatkozó szervek) Szenzoros rendszer az érzékelést megvalósító rendszer Belső állapot mechanikai rendszer állapota Külső állapot környezet állapota (anyagtudomány, jelfeldolgozás, adatfeldolgozás, információ-visszakeresés) Irányítórendszer az akció és az érzékelés közti kapcsolat Döntés egy adott akcióról a mechanikai rendszer és a környezet által jelentett korlátozásokat figyelembe véve (kibernetika, mesterséges intelligencia, szakértői rendszerek, szabályozáselmélet)

6 Robotika Autonómia Feladatmegoldás strukturálatlan környezetben Ipari robotika Erősen strukturált környezet Kisebb fokú autonómia Automatizált gyártórendszerek

7 Ipari robotika Automatizálás: Emberek helyettesítése gépekkel vm. gyártási folyamatban Fizikai munka elvégzése Döntéshozatal Merev automatizálás Tömegtermelés Egyféle termék Programozható automatizálás Kis-közepes kötegméret Különböző termékek Rugalmas automatizálás Különböző kötegméret Különböző termékek Robot definíciója: Újraprogramozható, többfunkciós manipulátor anyagok, eszközök, részegységek mozgatására, megváltoztatására programozott mozdulatsor segítségével különféle feladatok elvégzése érdekében. (- Robot Institute of America, 1980)

8 Ipari robot felépítése Manipulátor: Merev testek (szegmensek) sorozata illesztésekkel (csukló, izület) összekapcsolva Kar: mozgást biztosítja Csukló: kézügyesség Végberendezés: szükséges feladat elvégzése Beavatkozó szervek: A manipulátort mozgatja Izületeknél hatnak Működésük elektromos, hidraulikus, v. pneumatikus Szenzorok: manipulátor, illetve a környezet állapotát méri Szabályozórendszer: (számítógép), ami a manipulátor irányítását és felügyeletét biztosítja
, ami a")
9 Ipari robotok alkalmazása Anyagkezelés: képes felemelni mozgatni, és letenni egy tárgyat Palettázás Raktár feltöltés/kirakodás Adagolás Osztályozás Csomagolás Mérés: 3D mozgás, mérési képesség 3D tárgyak vizsgálata Kontúrok keresése Gyártási hibák keresése Gyártási műveletek: tárgyak és szerszámok mozgatására való képesség Ív- és ponthegesztés Festés, bevonás Ragasztás, forrasztás Vágás lézerrel és vízsugárral Őrlés, fúrás Öntés Csavarozás, huzalozás, rögzítés Összeszerelés (mechanikai és elektromos)

10 Rotációs: forgómozgás Manipulátor felépítések Alapszerkezet: kinematikai lánc típusa Nyílt kinematikai lánc: csak egy szegmens sorozat köti össze a lánc két végét Zárt kinematikai lánc: hurkot alkotnak a szegmensek (nagyobb terhelések esetén) Alapszerkezet: ízület Prizmatikus: transzlációs mozgás
 Alapszerkezet: ízület Prizmatikus:")
11 Manipulátorok szerkezete Munkatér (workspace): a környezet azon része, amit a végberendezés el tud érni. Formája, és térfogata függ a manipulátor felépítésétől, és az ízületek mechanikai korlátaitól Manipulátorok típusai a kar morgásának szabadsági fokai szerint Descartes Hengeres Gömb SCARA Antropomorf Végszerszám az aktuális feladat határozza meg: Megfogó, hegesztő, szórópisztoly, fúró, csavarhúzó, stb.

12 Manipulátorok szerkezete Descartes manipulátor 3 prizmatikus ízület, egymásra kölcsönösen merőleges tengelyekkel. A mozgási fokok száma megegyezik a szabadsági fokok számával: x,y,z Merev szerkezet Pontos pozícionálás a teljes munkatéren Kicsi a ügyessége Ha felülről közelíti meg a munkadarabot, állványos kialakítás (nagy teherbírás) Alkalmazás: anyagmozgatás, összeszerelés

13 Manipulátorok szerkezete Hengeres manipulátor 2 prizmatikus és 1 forgó ízület. A mozgási fokok száma megegyezik a szabadsági fokok számával: r,θ,z (hengeres koordinátarendszer) Merev szerkezet A pozícionálás pontossága csökken, ha r növekszik Vízszintesen elhelyezkedő nyílásokat is elér Alkalmazás: anyagmozgatás Hajtás: elektromos, hidraulikus

14 Manipulátorok szerkezete Gömbi manipulátor 1 prizmatikus és 2 forgó ízület. A mozgási fokok száma megegyezik a szabadsági fokok számával: r,θ,φ (gömbi koordinátarendszer) Kevésbé merev, és bonyolultabb szerkezet A pozícionálás pontossága csökken, ha r növekszik Hajtás: elektromos
 Kevésbé merev, és bonyolultabb szerkezet A")
15 Manipulátorok szerkezete SCARA manipulátor (Selective Compliance Assembly Ronot Arm) 1 prizmatikus és 2 forgó ízület, az összes ízület mozgási tengelye párhuzamos. Nincs közvetlen összefüggés mozgási fokok száma és a szabadsági fokok száma között Függőleges terhelést jól bírja, vízszintes irányban könnyed mozgás A pozícionálás pontossága csökken, ha távolodik az első ízület tengelyétől Alkalmazás: kisebb tárgyak manipulációja Hajtás: elektromos

16 Manipulátorok szerkezete Antropomorf manipulátor 3 forgó ízület, az első ízület mozgási tengelye merőleges a másik kettőjével, ezek párhuzamosak (emberi kar). A legmozgékonyabb az összes közül A pozícionálás pontossága változó a munkatéren belül Alkalmazás: széleskörű Hajtás: elektromos

17 Manipulátorok szerkezete Példák ABB IRB 4400 Fanuc I-21i AdeptOne XL

18 Dinamika: a manipulátor mozgási egyenleteinek felírása a rá ható erők és momentumok függvényeként beavatkozó szervek, ill. irányítási stratégia választása Robot manipulátorok Feladat végrehajtása: a végszerszám végrehajt egy előírt mozgásmintázatot A szabályozó rendszer irányítja a beavatkozókat a mozgásmintázat végrehajtása érdekében. A szabályozónak dinamikus modellre van szüksége. Modellezés Kinematika: leírja a csuklóváltozók és a végszerszám pozíciója, illetve orientációja közti analitikus kapcsolatot Differenciális kinematika: leírja a csuklómozgás és a végszerszám mozgása közti kapcsolatot (sebességekkel) Direkt kinematikai probléma: egy szisztematikus módszer, a végszerszám mozgását a csuklómozgás függvényeként adja meg. Inverz kinematikai probléma: az inverz probléma, a csuklómozgást a végszerszám mozgásának függvényeként adja meg.

19 Robot manipulátorok Irányítás Csuklókoordinátákban, vagy a végszerszám koordinátáiban Trajektóriatervezés: az állapotváltozók időfüggvényeit határozza meg a kívánt mozgás tömör leírása alapján (pont-pont mozgás, út) Mozgásirányítás: a csukló beavatkozók által biztosítandó, a kívánt trajektóriát megvalósító erők, és nyomatékok időbeli leírása (visszacsatolás) Kölcsönhatás szabályozása: a végberendezés és a környezet kölcsönhatását szabályozza (kontakt erők, stb) Aktuátorok (beavatkozók) és szenzorok
 Aktuátorok")
Pneumatika az ipari alkalmazásokban
 Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Infobionika ROBOTIKA. IX. Előadás. Robot manipulátorok I. Alapfogalmak. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Az ipari robotok definíciója
 Robot manipulátorok Az ipari robotok definíciója Mechanikai struktúra vagy manipulátor, amely merev testek (szegmensek) sorozatából áll, melyeket összeillesztések (csuklók, ízületek) kapcsolnak össze A
Robot manipulátorok Az ipari robotok definíciója Mechanikai struktúra vagy manipulátor, amely merev testek (szegmensek) sorozatából áll, melyeket összeillesztések (csuklók, ízületek) kapcsolnak össze A
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Robotika. Kinematika. Magyar Attila
 Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
6. Robotok és manipulátorok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
Infobionika ROBOTIKA. XI. Előadás. Robot manipulátorok III. Differenciális kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA XI. Előadás Robot manipulátorok III. Differenciális kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom A forgatási mátrix időbeli deriváltja A geometriai
Infobionika ROBOTIKA XI. Előadás Robot manipulátorok III. Differenciális kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom A forgatási mátrix időbeli deriváltja A geometriai
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
6. Robotok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
ROBOTTECHNIKA ALKALMAZÁSOK, ROBOT FOGALMA. Dr. Pintér József
 ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
GÉPIPARI AUTOMATIZÁLÁS
 GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
2010.08.29. Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása. Kézi Gépesített Automatizált
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Forgácsolás technológia számítógépes BAGFS15NNC/NLC 11 - A szerelés automatizálása Dr.
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Forgácsolás technológia számítógépes BAGFS15NNC/NLC 11 - A szerelés automatizálása Dr.
Handbook of Industrial Robotics
 Handbook of Industrial Robotics John Wiley & Sons, 1999 Ed. Shimon Y. NOF, Purdue Univ. USA Prof. KOVÁCS György PTE PMMK Műszaki Informatika és Villamos Intézet gyorgy.kovacs@sztaki.hu Robotok Karel Capek
Handbook of Industrial Robotics John Wiley & Sons, 1999 Ed. Shimon Y. NOF, Purdue Univ. USA Prof. KOVÁCS György PTE PMMK Műszaki Informatika és Villamos Intézet gyorgy.kovacs@sztaki.hu Robotok Karel Capek
5.2 Rugalmas gyártórendszerek alrendszerei. a) A megmunkáló alrendszer és elemei. Megmunkáló alrendszer. Megmunkáló központ
 A megmunkáló alrendszer és elemei. Megmunkáló alrendszer. Megmunkáló központ") Megmunkáló alrendszer 5.2 Rugalmas gyártórendszerek alrendszerei a munkadarabokon a technológiai műveletek elvégzése gyártóberendezések készülékek szerszámok mérőeszközök Anyagmozgatási alrendszer a munkadarabok
Megmunkáló alrendszer 5.2 Rugalmas gyártórendszerek alrendszerei a munkadarabokon a technológiai műveletek elvégzése gyártóberendezések készülékek szerszámok mérőeszközök Anyagmozgatási alrendszer a munkadarabok
Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
 A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
Forgácsolás technológia számítógépes tervezése I.
 Forgácsolás technológia számítógépes tervezése I. BAGFS15NNB Szerelési rendszer elemei Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása A szerelés automatizálása
Forgácsolás technológia számítógépes tervezése I. BAGFS15NNB Szerelési rendszer elemei Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása A szerelés automatizálása
NGB_AJ008_1 IPARI ROBOTOK
 Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
CNC gépek szerszámellátása
 CNC gépek szerszámellátása Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek I.-II., BMF Czéh Mihály Hervay Péter
CNC gépek szerszámellátása Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek I.-II., BMF Czéh Mihály Hervay Péter
Robottechnika. 1. Bevezetés. Ballagi Áron Automatizálási Tanszék
 Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Dr. Ballagi Áron tanszékvezető-helyettes, egyetemi docens Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Dr. Ballagi Áron tanszékvezető-helyettes, egyetemi docens Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA. 1. előadás. Dr. Pintér József. Robottechnika
 ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
670 milliszekundumos csomagolási ciklusidő
 670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
GYÁRTÓCELLÁK IPARI ROBOTOK. Összefoglaló áttekintés. 1. előadás. Dr. Pintér József. Gyártócellák
 GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Ipari robotok megfogó szerkezetei
 IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó
IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó
Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás robotra
 Budapesti M szaki És Gazdaságtudományi Egyetem Gépészmérnöki Kar M szaki Mechanikai Tanszék Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás
Budapesti M szaki És Gazdaságtudományi Egyetem Gépészmérnöki Kar M szaki Mechanikai Tanszék Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS-
 A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
Robotok Irányítása - Bevezetı
 Robotok Irányítása - Bevezetı Robotikai alapfogalmak A robot egy irányított mechanikai rendszer, amely az alábbi tulajdonságokkal rendelkezik: újraprogramozható, elıre megadott pályán képes mozogni, a
Robotok Irányítása - Bevezetı Robotikai alapfogalmak A robot egy irányított mechanikai rendszer, amely az alábbi tulajdonságokkal rendelkezik: újraprogramozható, elıre megadott pályán képes mozogni, a
Számítógépes geometria (mester kurzus)
") 2010 sz, Debreceni Egyetem Csuklós szerkezetek animációja (Kép 1985-b l: Tony de Peltrie) Csontváz-modellek Csuklós szerkezet (robotkar) A robotkar részei: csuklók (joints) rotációs prizmatikus (transzlációs)
2010 sz, Debreceni Egyetem Csuklós szerkezetek animációja (Kép 1985-b l: Tony de Peltrie) Csontváz-modellek Csuklós szerkezet (robotkar) A robotkar részei: csuklók (joints) rotációs prizmatikus (transzlációs)
2. E L Ő A D Á S D R. H U S I G É Z A
 Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
Gyártórendszerek fejlődésének fázisai
 Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
1. Mozgás Magyar Attila
 1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
Robotjog? Hogyan viszonyuljon a jog a robotokhoz és a mesterséges intelligenciához? Pódiumbeszélgetések a minőségről Június 5.
 Robotjog? Hogyan viszonyuljon a jog a robotokhoz és a mesterséges intelligenciához? Pódiumbeszélgetések a minőségről 2019. Június 5. Ződi Zsolt Egyetemi docens Három tézis (1) A robotikát szabályozni kell,
Robotjog? Hogyan viszonyuljon a jog a robotokhoz és a mesterséges intelligenciához? Pódiumbeszélgetések a minőségről 2019. Június 5. Ződi Zsolt Egyetemi docens Három tézis (1) A robotikát szabályozni kell,
Intelligens gépek elemei Bevezetés
 Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Gépgyártástechnológiai technikus szakma gyakorlati oktatásához OKJ száma: 54 521 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Foglalkozási napló a 20 /20. tanévre Gépgyártástechnológiai technikus szakma gyakorlati oktatásához OKJ száma: 54 521 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
ROBOTTECHNIKA. Ipari robotok szerkezeti egységei, terhelhetősége. Dr. Pintér József
 ROBOTTECHNIKA Ipari robotok szerkezeti egységei, terhelhetősége Dr. Pintér József Tartalom Ipari robotok osztályozása Ipari robotok szerkezeti egységei Ipari robotok terhelhetősége Vezetékek, csapágyak
ROBOTTECHNIKA Ipari robotok szerkezeti egységei, terhelhetősége Dr. Pintér József Tartalom Ipari robotok osztályozása Ipari robotok szerkezeti egységei Ipari robotok terhelhetősége Vezetékek, csapágyak
GYÁRTÓCELLÁK IPARI ROBOTOK. Összefoglaló áttekintés. 1. előadás. Dr. Pintér József. Gyártócellák
 GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás
 Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Korszerű szerszámgépek
 SZÉCHENYI ISTVÁN EGYETEM GYŐR SZERSZÁMGÉPEK (NGB_AJ009_2) Korszerű szerszámgépek Összeállította: Dr. Pintér József 2011.09.26. Korszerű szerszámgépek 1 Korszerű szerszámgépek VÁZLAT 1. Kinematikai alapok,
SZÉCHENYI ISTVÁN EGYETEM GYŐR SZERSZÁMGÉPEK (NGB_AJ009_2) Korszerű szerszámgépek Összeállította: Dr. Pintér József 2011.09.26. Korszerű szerszámgépek 1 Korszerű szerszámgépek VÁZLAT 1. Kinematikai alapok,
A gyártási rendszerek áttekintése
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL
 HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL Balog Viktor, Szolnok, 2018 AZ ELŐADÁS TARTALMA Cég bemutatása A hegesztés automatizálás fontossága A hegesztés automatizálás (célgépes és robotos alkalmazások)
HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL Balog Viktor, Szolnok, 2018 AZ ELŐADÁS TARTALMA Cég bemutatása A hegesztés automatizálás fontossága A hegesztés automatizálás (célgépes és robotos alkalmazások)
SCARA robot munkatere és pályagenerálás
 SCARA robot munkatere és pályagenerálás 1. A gyakorlat célja Egy SCARA robotkar munkatere korlátainak meghatározása felhasználva az direkt geometriai feladatot megoldó programot. SCARA robot elírt, világkoordinátákban
SCARA robot munkatere és pályagenerálás 1. A gyakorlat célja Egy SCARA robotkar munkatere korlátainak meghatározása felhasználva az direkt geometriai feladatot megoldó programot. SCARA robot elírt, világkoordinátákban
Foglalkozási napló. Autógyártó 11. évfolyam
 Foglalkozási napló a 20 /20. tanévre Autógyártó 11. évfolyam (OKJ száma: 34 521 01) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Foglalkozási napló a 20 /20. tanévre Autógyártó 11. évfolyam (OKJ száma: 34 521 01) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Szenzorcsatolt robot: A szenzorcsatolás lépései:
 1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
Előadó: Nagy István (A65) Gyakorlatvezető: Tolnai András
 Gyakorlatvezető: Tolnai András") Ipari Robotok Programozása BEVEZETÉS Előadó: Nagy István (A65) Gyakorlatvezető: Tolnai András Ajánlott irodalom: B. Leatham-Jones: Elements of Industrial Robotics, Pitman Publishing, 1987. CH. Blume, W.
Ipari Robotok Programozása BEVEZETÉS Előadó: Nagy István (A65) Gyakorlatvezető: Tolnai András Ajánlott irodalom: B. Leatham-Jones: Elements of Industrial Robotics, Pitman Publishing, 1987. CH. Blume, W.
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Robotika, otthoni robotika
 Robotika, otthoni robotika Dr. Dárdai Árpád, MHTT távközlési szakértő dardai.arpad@t-online.hu Robothadviselés-2009 konferencia, ZMNE Budapest, 2009. November 24. 2008. 11. 24. 1 Rövid tartalom A robot,
Robotika, otthoni robotika Dr. Dárdai Árpád, MHTT távközlési szakértő dardai.arpad@t-online.hu Robothadviselés-2009 konferencia, ZMNE Budapest, 2009. November 24. 2008. 11. 24. 1 Rövid tartalom A robot,
Szakképesítés: 54 523 01 Automatikai technikus Szóbeli vizsgatevékenység A vizsgafeladat megnevezése: Irányítástechnikai alapok, gyártórendszerek
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A Hamilton-Jacobi-egyenlet
 A Hamilton-Jacobi-egyenlet Ha sikerül olyan kanonikus transzformációt találnunk, amely a Hamilton-függvényt zérusra transzformálja akkor valamennyi új koordináta és impulzus állandó lesz: H 0 Q k = H P
A Hamilton-Jacobi-egyenlet Ha sikerül olyan kanonikus transzformációt találnunk, amely a Hamilton-függvényt zérusra transzformálja akkor valamennyi új koordináta és impulzus állandó lesz: H 0 Q k = H P
Ipari robotok osztályozása, szerkezeti egységei
 ROBOTTECHNIKA Ipari robotok osztályozása, szerkezeti egységei 3. előadás Dr. Pintér József A robotok osztályozhatók: Robotok osztályozása, felépítésük Mozgásuk Munkaterületük Felépítésük Vezérlésük Feladatuk
ROBOTTECHNIKA Ipari robotok osztályozása, szerkezeti egységei 3. előadás Dr. Pintér József A robotok osztályozhatók: Robotok osztályozása, felépítésük Mozgásuk Munkaterületük Felépítésük Vezérlésük Feladatuk
Gingl Zoltán, Szeged, 2015. 2015.09.29. 19:14 Elektronika - Alapok
 Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
International GTE Conference MANUFACTURING 2012. 14-16 November, 2012 Budapest, Hungary. Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
 International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
Pere Balázs október 20.
 Végeselem anaĺızis 1. előadás Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2014. október 20. Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)?
Végeselem anaĺızis 1. előadás Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2014. október 20. Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)?
Forgácsoló gyártócellák, gyártórendszerek 1.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
Piri Dávid. Mérőállomás célkövető üzemmódjának pontossági vizsgálata
 Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Nyári gyakorlat teljesítésének igazolása Hiányzások
 Nyári gyakorlat teljesítésének igazolása Hiányzások - - Az összefüggő szakmai gyakorlatról hiányozni nem lehet. Rendkívüli, nem tervezhető esemény esetén az igazgatóhelyettest kell értesíteni. - A tanulók
Nyári gyakorlat teljesítésének igazolása Hiányzások - - Az összefüggő szakmai gyakorlatról hiányozni nem lehet. Rendkívüli, nem tervezhető esemény esetén az igazgatóhelyettest kell értesíteni. - A tanulók
SCARA robot programozása
 SCARA robot programozása 1. A gyakorlat célja Az MTAB SCARA robot programozási nyelvének megismerése. Robotprogram fejlesztése cilindrikus munkadarab áthelyezésének megoldására. 2. Elméleti bevezet A robotok
SCARA robot programozása 1. A gyakorlat célja Az MTAB SCARA robot programozási nyelvének megismerése. Robotprogram fejlesztése cilindrikus munkadarab áthelyezésének megoldására. 2. Elméleti bevezet A robotok
Diplomamunka. Léptetőasztal alatt elhelyezett építőelemek felismerése és robotkarral történő manipulációja. Gelencsér Zsolt
 Diplomamunka Léptetőasztal alatt elhelyezett építőelemek felismerése és robotkarral történő manipulációja Pázmány Péter Katolikus Egyetem Információs Technológiai Kar Műszaki informatika szak Gelencsér
Diplomamunka Léptetőasztal alatt elhelyezett építőelemek felismerése és robotkarral történő manipulációja Pázmány Péter Katolikus Egyetem Információs Technológiai Kar Műszaki informatika szak Gelencsér
Intelligens Technológiák gyakorlati alkalmazása
 Intelligens Technológiák gyakorlati alkalmazása 13-14. Október 2016 Budaörs, Gyár u. 2. SMARTUS Zrt. SMARTUS Nyílt Nap 2016 11.10.2016 Page 1 Ütközésvédelem intelligensen! Németh Zoltán Területi értékesítési
Intelligens Technológiák gyakorlati alkalmazása 13-14. Október 2016 Budaörs, Gyár u. 2. SMARTUS Zrt. SMARTUS Nyílt Nap 2016 11.10.2016 Page 1 Ütközésvédelem intelligensen! Németh Zoltán Területi értékesítési
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe
 Robotika A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe Werner Ágnes Bevezetés Maga a robot szó 1921-ben CARELC CAPEK Rossum Univerzális Robotjai című színdarabjában
Robotika A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe Werner Ágnes Bevezetés Maga a robot szó 1921-ben CARELC CAPEK Rossum Univerzális Robotjai című színdarabjában
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
A mechanikai alaptörvények ismerete
 A mechanikai alaptörvények ismerete Az oldalszám hivatkozások a Hudson-Nelson Útban a modern fizikához c. könyv megfelelő szakaszaira vonatkoznak. A Feladatgyűjtemény a Mérnöki fizika tárgy honlapjára
A mechanikai alaptörvények ismerete Az oldalszám hivatkozások a Hudson-Nelson Útban a modern fizikához c. könyv megfelelő szakaszaira vonatkoznak. A Feladatgyűjtemény a Mérnöki fizika tárgy honlapjára
FANUC Robottípusok, alkalmazások. Anyagmozgatás, szerelés, stb. Festés, lakkozás. Hegesztés
 FANUC Ipari Robotok FANUC Robottípusok, alkalmazások Festés, lakkozás Anyagmozgatás, szerelés, stb. Hegesztés Festő robotcellák A festő cellák sajátosságai általában: Speciális robbanásbiztos cella elszívással
FANUC Ipari Robotok FANUC Robottípusok, alkalmazások Festés, lakkozás Anyagmozgatás, szerelés, stb. Hegesztés Festő robotcellák A festő cellák sajátosságai általában: Speciális robbanásbiztos cella elszívással
Robotkiszolgáló-rendszer kinematikai szimulációja
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR TUDOMÁNYOS DIÁKKÖRI DOLGOZAT Robotkiszolgáló-rendszer kinematikai szimulációja Készítették: Rónai László Cservenák Ákos Miskolci Egyetem GÉIK mechatronikai
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR TUDOMÁNYOS DIÁKKÖRI DOLGOZAT Robotkiszolgáló-rendszer kinematikai szimulációja Készítették: Rónai László Cservenák Ákos Miskolci Egyetem GÉIK mechatronikai
Internet of Things és Ipar 4.0 az agrárszektorban. Tarcsi Ádám, ELTE Informatikai Kar
 Internet of Things és Ipar 4.0 az agrárszektorban Tarcsi Ádám, ELTE Informatikai Kar ade@inf.elte.hu Ipar 4.0 a 4. ipari forradalom 18. század vége gőzgép, szövőgép, a mechanikus gépek 20. század eleje
Internet of Things és Ipar 4.0 az agrárszektorban Tarcsi Ádám, ELTE Informatikai Kar ade@inf.elte.hu Ipar 4.0 a 4. ipari forradalom 18. század vége gőzgép, szövőgép, a mechanikus gépek 20. század eleje
Forgácsoló gyártócellák, gyártórendszerek 2.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
Mechanika Kinematika. - Kinematikára: a testek mozgását tanulmányozza anélkül, hogy figyelembe venné a kiváltó
 Mechanika Kinematika A mechanika a fizika része mely a testek mozgásával és egyensúlyával foglalkozik. A klasszikus mechanika, mely a fénysebességnél sokkal kisebb sebességű testekre vonatkozik, feloszlik:
Mechanika Kinematika A mechanika a fizika része mely a testek mozgásával és egyensúlyával foglalkozik. A klasszikus mechanika, mely a fénysebességnél sokkal kisebb sebességű testekre vonatkozik, feloszlik:
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei
 Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
FORGÁCSNÉLKÜLI ALAKÍTÓ MŰVELETEK
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ MŰVELETEK ÁTTEKINTÉS Forgácsnélküli alakító műveletek csoportosítása Lemezalakító eljárások Anyagszétválasztó műveletek Lemez
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ MŰVELETEK ÁTTEKINTÉS Forgácsnélküli alakító műveletek csoportosítása Lemezalakító eljárások Anyagszétválasztó műveletek Lemez
Elektronikus közelítéskapcsolók
 Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Robottechnika. 2. Ipari robotok. Ballagi Áron Automatizálási Tanszék
 Robottechnika 2. Ipari robotok Ballagi Áron Automatizálási Tanszék IGM látogatás, oktatás IGM Robotrendszerek Kft. Hegesztőrobotok specialistája http://www.igm-group.com/hu Max. 8 fő! akiket tényleg érdekel
Robottechnika 2. Ipari robotok Ballagi Áron Automatizálási Tanszék IGM látogatás, oktatás IGM Robotrendszerek Kft. Hegesztőrobotok specialistája http://www.igm-group.com/hu Max. 8 fő! akiket tényleg érdekel
RUGALMAS GYÁRTÓRENDSZEREK LEMEZALAKÍTÁSHOZ
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) RUGALMAS GYÁRTÓRENDSZEREK LEMEZALAKÍTÁSHOZ ESETTANULMÁNYOK Alapfogalmak Rugalmas gyártórendszer Flexible Manufacturing System (FMS) A rendszer egy
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) RUGALMAS GYÁRTÓRENDSZEREK LEMEZALAKÍTÁSHOZ ESETTANULMÁNYOK Alapfogalmak Rugalmas gyártórendszer Flexible Manufacturing System (FMS) A rendszer egy
Nagy pontosságú 3D szkenner
 Tartalom T-model Komponensek Előzmények Know-how Fejlesztés Pilot projektek Felhasználási lehetőségek 1 T-model: nagy pontosságú aktív triangulációs 3D lézerszkenner A 3D szkennert valóságos tárgyak 3D
Tartalom T-model Komponensek Előzmények Know-how Fejlesztés Pilot projektek Felhasználási lehetőségek 1 T-model: nagy pontosságú aktív triangulációs 3D lézerszkenner A 3D szkennert valóságos tárgyak 3D
FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK ÁTTEKINTÉS Sajtológépek felosztása Működtetés szerint: Mechanikus sajtológépek (excenteres, könyökemelős vagy más mechanizmussal
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK ÁTTEKINTÉS Sajtológépek felosztása Működtetés szerint: Mechanikus sajtológépek (excenteres, könyökemelős vagy más mechanizmussal
VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. ELŐADÁSI ANYAG TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. - 1 -
 - 1 - VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. ELŐADÁSI ANYAG *2.A gyártmány és technológia sajátosságai. A gyártandó alkatrész geometriai
- 1 - VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. ELŐADÁSI ANYAG *2.A gyártmány és technológia sajátosságai. A gyártandó alkatrész geometriai
A végeselem módszer alapjai. 2. Alapvető elemtípusok
 A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
Mester Gyula 2003 Intelligens robotok és rendszerek
 Mester Gyula 003 Intelligens robotok és rendszerek Robotmanipulátorok kinematikája Robotmanipulátorok dinamikája Robotmanipulátorok szabad mozgásának hagyományos irányítása Robotmanipulátorok adaptív irányítása
Mester Gyula 003 Intelligens robotok és rendszerek Robotmanipulátorok kinematikája Robotmanipulátorok dinamikája Robotmanipulátorok szabad mozgásának hagyományos irányítása Robotmanipulátorok adaptív irányítása
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
Végeselem analízis. 1. el adás
 Végeselem analízis 1. el adás Pere Balázs Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2016. szeptember 7. Mi az a VégesElem Analízis (VEA)? Parciális dierenciálegyenletek (egyenletrendszerek)
Végeselem analízis 1. el adás Pere Balázs Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2016. szeptember 7. Mi az a VégesElem Analízis (VEA)? Parciális dierenciálegyenletek (egyenletrendszerek)
Ipari robotok megfogó szerkezetei
 ROBOTTECHNIKA Ipari robotok megfogó szerkezetei 7. előad adás Dr. Pintér József Tananyag vázlatav 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó szerkezetek kialakítása
ROBOTTECHNIKA Ipari robotok megfogó szerkezetei 7. előad adás Dr. Pintér József Tananyag vázlatav 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó szerkezetek kialakítása
A mechanika alapjai. A pontszerű testek dinamikája
 A mechanika alapjai A pontszerű testek dinamikája Horváth András SZE, Fizika Tsz. v 0.6 1 / 26 alapi Bevezetés Newton I. Newton II. Newton III. Newton IV. alapi 2 / 26 Bevezetés alapi Bevezetés Newton
A mechanika alapjai A pontszerű testek dinamikája Horváth András SZE, Fizika Tsz. v 0.6 1 / 26 alapi Bevezetés Newton I. Newton II. Newton III. Newton IV. alapi 2 / 26 Bevezetés alapi Bevezetés Newton
Ipari robotok. A másik megfogalmazásunk ennél tömörebb: A robot olyan, nyílt kinematikai láncú mechanizmus, amely:
 Ipari robotok Mobil robotok egyelőre nem játszanak alapvető szerepet átfogó ipari alkalmazások terén. Jelenleg meglepő tulajdonságokkal rendelkező, leginkább játékra, házibuli-meglepetésként alkalmazható
Ipari robotok Mobil robotok egyelőre nem játszanak alapvető szerepet átfogó ipari alkalmazások terén. Jelenleg meglepő tulajdonságokkal rendelkező, leginkább játékra, házibuli-meglepetésként alkalmazható
Intelligens ágensek Mesterséges Intelligencia rendszertechnikai gyökerei
 Intelligens ágensek Mesterséges Intelligencia rendszertechnikai gyökerei Dobrowiecki Tadeusz Mérés és Információs Rendszerek Tanszék Habilitációs előadás BME-VIK, október 2013 1/37 oldal 1. Lehet-e intelligens
Intelligens ágensek Mesterséges Intelligencia rendszertechnikai gyökerei Dobrowiecki Tadeusz Mérés és Információs Rendszerek Tanszék Habilitációs előadás BME-VIK, október 2013 1/37 oldal 1. Lehet-e intelligens
Érintkezés nélküli érzékelés és mérés robotcellában
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Villamosmérnöki és Informatikai kar Irányítástechnika és Informatika Tanszék Folyamatirányítás Laboratórium Érintkezés nélküli érzékelés és mérés robotcellában
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Villamosmérnöki és Informatikai kar Irányítástechnika és Informatika Tanszék Folyamatirányítás Laboratórium Érintkezés nélküli érzékelés és mérés robotcellában
Robottechnika II. 1. Bevezetés, ismétlés. Ballagi Áron Automatizálási Tanszék
 Robottechnika II. 1. Beveetés, ismétlés Ballagi Áron Automatiálási Tansék Bemutatkoás Dr. Ballagi Áron tansékveető-helettes, egetemi docens Automatiálási Ts. C71, 3461 Autonóm és Intelligens Robotok Laboratórium
Robottechnika II. 1. Beveetés, ismétlés Ballagi Áron Automatiálási Tansék Bemutatkoás Dr. Ballagi Áron tansékveető-helettes, egetemi docens Automatiálási Ts. C71, 3461 Autonóm és Intelligens Robotok Laboratórium
Teljes körű szolgáltatások a robotkar végére szerelhető szerszámokhoz Az OnRobot fogó- és érzékelési technológiák széles választékát kínálja ipari
 Teljes körű szolgáltatások a robotkar végére szerelhető szerszámokhoz Az OnRobot fogó- és érzékelési technológiák széles választékát kínálja ipari automatizálási célokra Mi gondoskodunk a megtakarításról,
Teljes körű szolgáltatások a robotkar végére szerelhető szerszámokhoz Az OnRobot fogó- és érzékelési technológiák széles választékát kínálja ipari automatizálási célokra Mi gondoskodunk a megtakarításról,
Programozott vezérlések (NGB_AU026)
") Programozott vezérlések (NGB_AU026) SMC IPC-202A folyadékcsomagoló egység programozása Bajzek Patrik A59SUA Illés József Y6NXZA Kardos Péter EWR0PS Kelemen János G781BE Kovács Benedek E002J6 A projekt
Programozott vezérlések (NGB_AU026) SMC IPC-202A folyadékcsomagoló egység programozása Bajzek Patrik A59SUA Illés József Y6NXZA Kardos Péter EWR0PS Kelemen János G781BE Kovács Benedek E002J6 A projekt
DENER Plazmavágók. Típus: Mitsubishi DNR-I 1530 CNC. Dener plazmavágás. Dener plazmavágók. http://www.dener.com/sayfa/89/plasma-cutting.
 DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Gépgyártástechnológiai technikus szakma gyakorlati oktatásához OKJ száma: 54 521 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Foglalkozási napló a 20 /20. tanévre Gépgyártástechnológiai technikus szakma gyakorlati oktatásához OKJ száma: 54 521 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
EU-Project Nr. 2005-146319,,MINOS, EU-Project Nr. DE/08/LLP-LDV/TOI/147110,,MINOS**
 Mechatronika Modul 10: Robotika Munkafüzet Készítették: Petr Blecha Zden k Kolíbal Radek Knoflí ek Aleš Pochylý Tomáš Kubela Radim Blecha Tomáš B ezina Brno-i M szaki Egyetem, Gépészmérnöki Kar Gyártási
Mechatronika Modul 10: Robotika Munkafüzet Készítették: Petr Blecha Zden k Kolíbal Radek Knoflí ek Aleš Pochylý Tomáš Kubela Radim Blecha Tomáš B ezina Brno-i M szaki Egyetem, Gépészmérnöki Kar Gyártási
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
Robotmechanizmusok Dr. Szabó, Zsolt Budai, Csaba Dr. Kovács, László Dr. Lipovszki, György
 Robotmechanizmusok Dr. Szabó, Zsolt Budai, Csaba Dr. Kovács, László Dr. Lipovszki, György Robotmechanizmusok írta Dr. Szabó, Zsolt, Budai, Csaba, Dr. Kovács, László, és Dr. Lipovszki, György Publication
Robotmechanizmusok Dr. Szabó, Zsolt Budai, Csaba Dr. Kovács, László Dr. Lipovszki, György Robotmechanizmusok írta Dr. Szabó, Zsolt, Budai, Csaba, Dr. Kovács, László, és Dr. Lipovszki, György Publication
Versenyző kódja: 38 27/2012. (VIII. 27.) NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.
 NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.") 54 523 04-2015 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
54 523 04-2015 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
Messer Szakmai Nap. Messer Szakmai nap
 Messer Szakmai Nap Messer Innovációs Fórum Lézersugaras megmunkálások, újdonságok, fejlesztési trendek EUROBLECH és LAF 2016 érdekességei Halász Gábor Tartalom Újdonságok, fejlesztések a Lézersugaras vágás
Messer Szakmai Nap Messer Innovációs Fórum Lézersugaras megmunkálások, újdonságok, fejlesztési trendek EUROBLECH és LAF 2016 érdekességei Halász Gábor Tartalom Újdonságok, fejlesztések a Lézersugaras vágás
Gyártórendszerek Dinamikája. Gyártórendszerek jellemzése és szerkezete Gyártórendszerekkel kapcsolatos mérnöki feladatok
 GyRDin-02 p. 1/20 Gyártórendszerek Dinamikája Gyártórendszerek jellemzése és szerkezete Gyártórendszerekkel kapcsolatos mérnöki feladatok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék
GyRDin-02 p. 1/20 Gyártórendszerek Dinamikája Gyártórendszerek jellemzése és szerkezete Gyártórendszerekkel kapcsolatos mérnöki feladatok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék
Robottechnika szakirány
 Robottechnika szakirány Robotok és robotszerû eszközök ipari alkalmazásának fejlesztési, programozási, irányítástechnikai és rendszerintegrálási feladatait megoldani képes informatikus mérnökök képzése
Robottechnika szakirány Robotok és robotszerû eszközök ipari alkalmazásának fejlesztési, programozási, irányítástechnikai és rendszerintegrálási feladatait megoldani képes informatikus mérnökök képzése