Intelligens gépek elemei Bevezetés
|
|
|
- Etelka Vörösné
- 5 évvel ezelőtt
- Látták:
Átírás
1 Intelligens gépek elemei Bevezetés



 Dinamók,")
 Forgó")

2 A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó szivattyúk (1880) Belsőégésű motor (1880) Mechanikus írógép Váltakozó áramú motor (1889)






3 A gépészet fejlődése, a mechatronika kialakulása Az 1920 körüli évek Elektro Mechanikus rendszerek Hagyományos szerszámgépek Villamos hajtású szivattyúk Relék, tekercsek Hidraulika, pneumatika Elektronikus erősítők PI kontrollerek (1930) Elektromos írógép



4 A gépészet fejlődése, a mechatronika kialakulása Az 1935 körüli évek Mechanikus rendszerek analóg elektronikus vezérléssel Gőzturbinák Repülőgép ipar Tranzisztor (1948) Tirisztor (1955)
5



 Valós idejű")
")
6 A gépészet fejlődése, a mechatronika kialakulása Az 1955 körüli évek Mechanikus rendszerek analóg elektronikus szabályozással Elektronikus vezérlésű felvonók Digitális számítógép (1955) Folyamat számítógép (1959) Valós idejű szoftver (1966) Mikroszámítógép (1971) Digitális decentralizált automatizálás (1975)




")
 Buszrendszer Új")
7 A gépészet fejlődése, a mechatronika kialakulása Az 1975 körüli évek Mechanikus rendszerek digitális szabályozással Számjegyvezérlésű szerszámgépek Ipari robotok Ipari parkok Lemezmeghajtók Mikrokontroller (1978) Személyi számítógép (1980) Buszrendszer Új aktuátorok, szenzorok A komponensek integrálása

8




 Buszrendszer Új")
9 A gépészet fejlődése, a mechatronika kialakulása Az 1985 körüli évek Mechatronikus rendszerek: mechanika és elektronikus hardver integrációja szoftver által meghatározott funkciók, új tervezési eszközök a szimultán tervezéshez, egymást erősítő hatások Számjegyvezérlésű szerszámgépek Ipari robotok Ipari parkok Lemezmeghajtók Mikrokontroller (1978) Személyi számítógép (1980) Buszrendszer Új aktuátorok, szenzorok A komponensek integrálása

10
11 Szétválaszthatóak e a rendszerek? Egy új minőségi szint Esőszenzor Motor Hőmérő Sebességváltó Ablaktörlő Differenciálmű Akku Generátor Szervo AC pumpa ABS Kipörgésgátló Fék Olajszűrő Villamos rész, minden itt van, ami nem gépészet. Gépészeti rész, itt csak az van, amihez a gépészmérnök ért



12 A mai autó egy mechatronikai rendszer, amelynek alapja a gépészeti rendszer
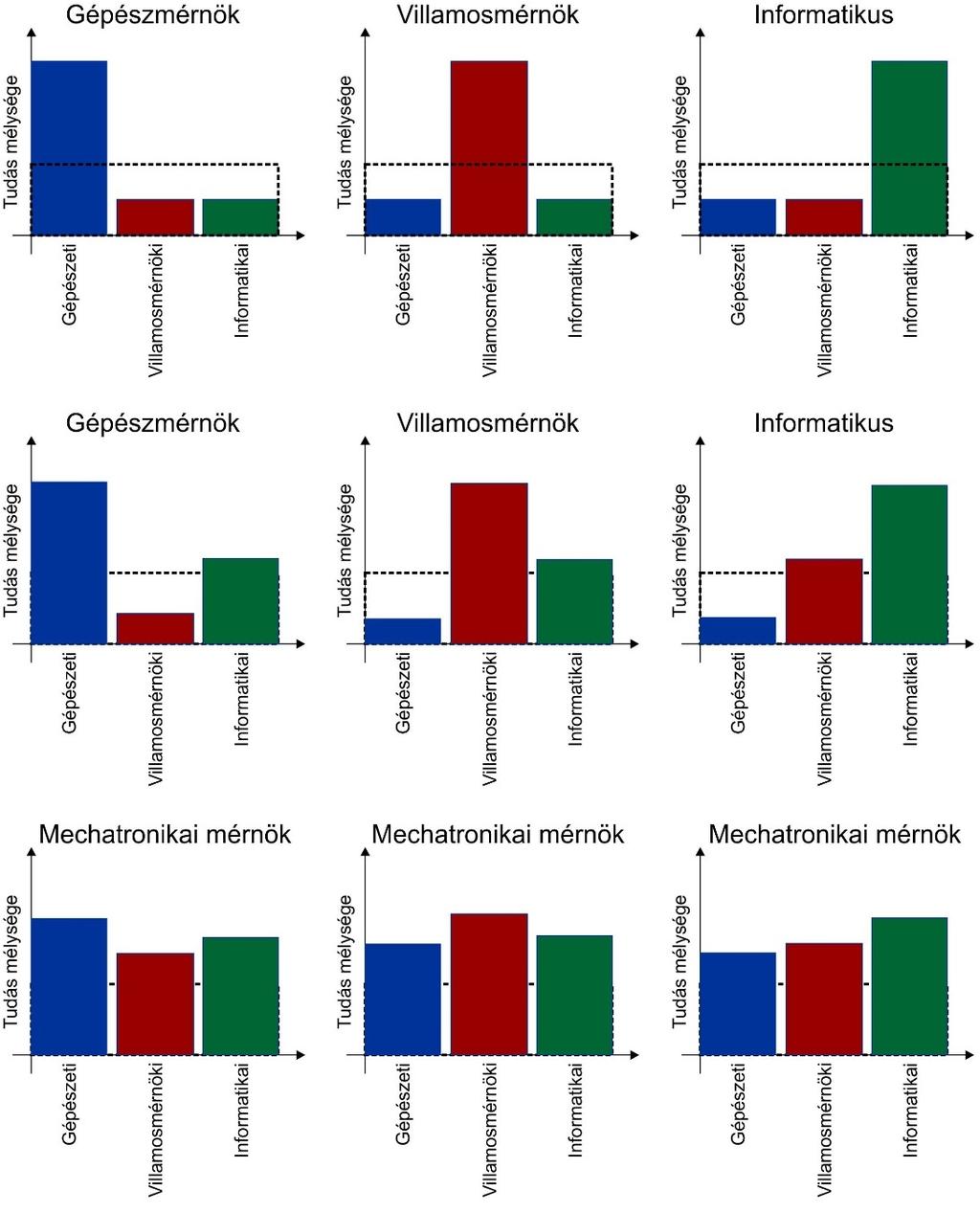
13 Mechatronikai rendszerek A mechatronika a gépészet, az elektronika és az informatika egymás hatását erősítő integrációja a termékekben és folyamatokban, és azok tervezésében, gyártásában. Alkalmazott informatika Elektronika Informatika Gépészet Gépészeti informatika Elektromechanika








14
15

16 Példa a mechatronikai rendszerekre A kormánymű elvi ábrája A korszerű gépjárműnél a járműsebesség függvényében változtatni kell a kormánymű áttételét. Ugyanis nagyobb sebességeknél a kormánykerék kis elfordulása esetén balesetveszélyesen nagy járműmozgások léphetnek fel. Ezért nagy járműsebességeknél a kormánymű áttételét meg kellene növelni. Ugyanakkor kis sebességeknél, pl. parkoláskor a túlzottan nagy áttétel kedvezőtlen lenne, ilyenkor az áttételt csökkenteni kell.


17 Elméleti alapok Az ábra mutatja, hogy a sebesség függvényében hogyan változik a kormánymű áttétele. Ezt a feladatot pusztán mechanikus elemekkel szinte lehetetlen megvalósítani, a mechatronika segítségével viszont a feladat megoldható.

18 Elektronikusan kommutált motor


19 Az elektronikusan kommutált szervomotor elvi ábrája és működési diagramja A nyomaték fordulatszám tartomány, amelyen belül a motor működhet A motor állórésze tekercselt pólusokat, a forgórész állandó mágneseket tartalmaz

20 Példa a mechatronikai rendszerekre Sokkal összetettebb feladatok és manőverek megvalósítására, mint az ember. Az intelligens járműrendszerek olyan kritikus helyzetekben is uralni tudják az autót, amikor az már meghaladja a vezető képességeit és gyorsaságát.

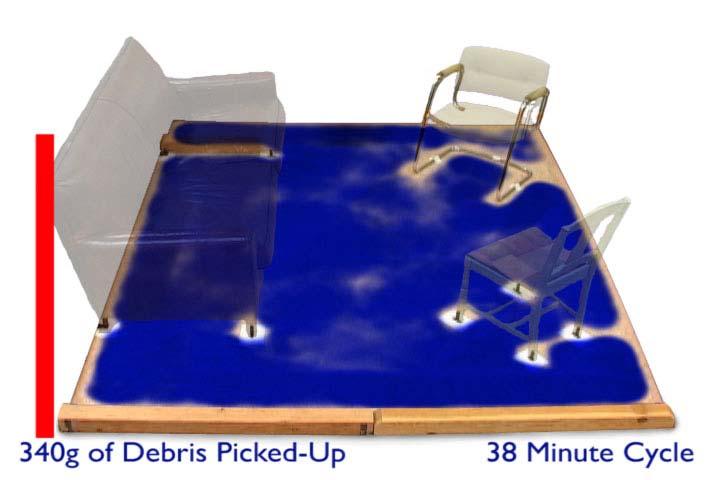
21 A robot és a mozgás stratégiája


22 A robot segédfunkciói Meg lehet akadályozni, hogy a robot elhagyja a szobát. Alacsony akkufeszültség esetén a robot felkeresi a töltőkészüléket.
23


24

25 Irányítás Szabályozás és vezérlés
26 Szabályozás
27 Szabályozás
28 Szabályozás
29 Egy mechatronikai eszköz általános struktúrája Érzékelők Működtetők Mechanikai rendszer Irányítórendszer Fizikai mennyiségek??????????? Szenzorok?????????????????????? Mért értékek Rendelkező jelek Mechatronikai struktúra Mért érték feldolgozás Digitális számítógép Teljesítmény rész Visszacsatolások!!!!!!!!!!! Aktuátorok!!!!!!!!!!!!!!!!!!!!! Mozgások Hajtások és vezetékek Erők vagy sebességek
30
31 Mennyiben azonos és mennyiben különbözik a mechatronika klasszikus mechanikától? A mechanika azt vizsgálja, hogy a gépészeti rendszer a rá ható erők és nyomatékok hatására hogyan viselkedik A mechatronika azt vizsgálja, hogy mekkora erőknek és nyomatékoknak kell a mechanikai rendszerre hatnia, hogy az előírt pályán haladjon, vagy előírt helyzetbe kerüljön

32 Régebben úgy tanították, hogy a precíz pozícionáláshoz nagy tömegek, súlyos vezetékek kellenek.

33

34 A mai mechatronikus rendszerek, intelligenciájuknak köszönhetően képesek precíz pozícionálásra a mozgó, és rugalmasan deformálódó rendszerekben is.
35 Mesterséges intelligencia Mikor jobb, mint az emberi? gyorsaság objektivitás nagy számítási kapacitás monotonitás Az "Intelligens" és "Okos" termékek a környezetből érkező ingerekre differenciált választ képesek adni. Legyen hatékonyabb Gazdaságosabb Használhatóbb Biztonságosabb Jobb Differenciáltabb választ képes adni több szenzor Igényesebb" szoftver ötletesebb mechanika

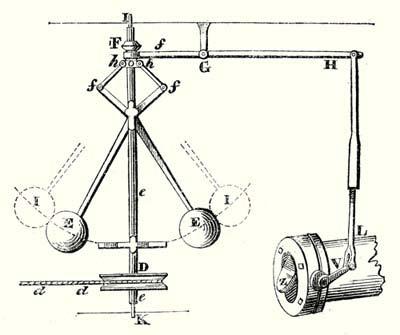

36 Mechanikai AI Gőzgép fordulatszámának szabályozása (centrifugál regulátor) Bütykös tengely




37 Mai gépeinknél a mesterséges intelligencia hordozója az elektronika és az szoftver. Ezért minden fizikai jelet le kell fordítani az "elektronika nyelvére", elvégezni a jelfeldolgozást, majd aktuátorokon keresztül manipulálni a rendszert. Elektroncsövek, Tranzisztorok





38 Fejlődés Moore törvény: másfél év alatt az azonos területen lévő tranzisztorok száma megduplázódik (2014 ig talán így is lesz) Kryder törvény: exponenciális növekedés a tárolókapacitásokban... sőt, a CCD detektorok pixelszáma is exponenciális növekedést mutat Organikus processzorok

39


40




41
42
 köbösen változik Tehát minél kisebb egy")

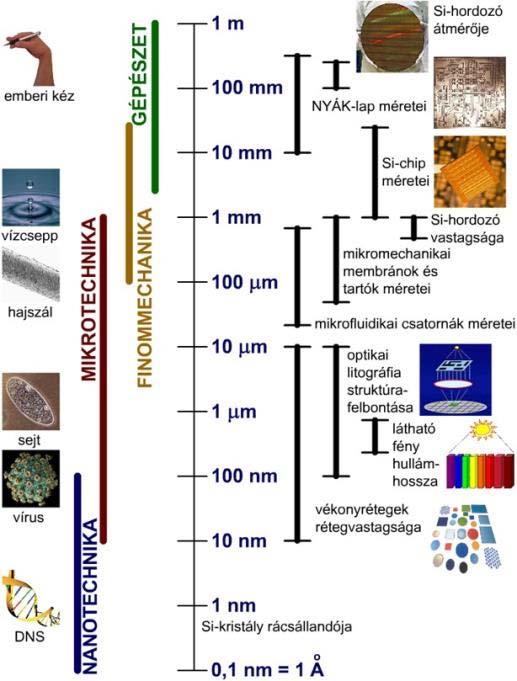
43 A kis méretek hatása A hosszmérettel a felület négyzetesen, a térfogat (tehát a tömeg is) köbösen változik Tehát minél kisebb egy konstrukció, annál kisebb keresztmetszet is elég a tömeg megtartásához. A hangya testtömegének többszörösét képes függőlegesen fölfelé cipelni


44



45 A kis méretek hatása Sas: 0,1 Hz szárnyfrekvencia Veréb: 1 Hz szárnyfrekvencia Szúnyog: 400 Hz szárnyfrekvencia

46 A kis méretek legfontosabb következményei: 1. Mivel a tized akkora szerkezet súlya ezred akkora, a szerkezet súlyából eredő terhelésekkel nem kell számolni a finommechanikában és a mikro mechanikában. 2. Mivel a tized akkora szerkezet felülete század akkora, a térfogatához képest nagy lesz a felülete. Ezért nagyobb teljesítményre képes, mert jobbak a hűtési viszonyok.
. 4. Ugyanezt okozza a rendszer kapacitásváltozása is, ami a felülettel arányos. (hő kapacitás, elektromos kapacitás)")
47 A kis méretek legfontosabb következményei: 3. A lineáris méretek csökkenésével a rendszer sajátfrekvenciája növekszik, így gyorsabb működésre lesz képes. (pl. élővilágban cickány és teknős). 4. Ugyanezt okozza a rendszer kapacitásváltozása is, ami a felülettel arányos. (hő kapacitás, elektromos kapacitás)

48 A kis méretek legfontosabb következményei: 5. A méretek csökkenésével előtérbe kerülnek addig elhanyagolható tényezők. (pl. felületi feszültség, légáramlat, mágnesesség)

49
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Széchenyi István Egyetem Mechatronikai mérnök BSc
 l Kód Tantárgyak NGB_AG_ Mechanika - Statika félé ea tgy k kredit Széchenyi Istán Egyetem Mechatronikai mérnök BSc ÓE Bánki Gépész ÓE Bánki Mechatronika Bánki BT SzE Járműmérnök SzE Gépész Mechanika I.
l Kód Tantárgyak NGB_AG_ Mechanika - Statika félé ea tgy k kredit Széchenyi Istán Egyetem Mechatronikai mérnök BSc ÓE Bánki Gépész ÓE Bánki Mechatronika Bánki BT SzE Járműmérnök SzE Gépész Mechanika I.
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei
 Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Mechatronika oktatásával kapcsolatban felmerülő kérdések
 Mechatronika oktatásával kapcsolatban felmerülő kérdések Az emberi tudásnak megvannak a határai, de nem tudjuk, hol (Konrad Lorenz) Célom ezzel a tanulmánnyal a mechatronika, mint interdiszciplináris tudomány
Mechatronika oktatásával kapcsolatban felmerülő kérdések Az emberi tudásnak megvannak a határai, de nem tudjuk, hol (Konrad Lorenz) Célom ezzel a tanulmánnyal a mechatronika, mint interdiszciplináris tudomány
Gingl Zoltán, Szeged, 2015. 2015.09.29. 19:14 Elektronika - Alapok
 Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
Gingl Zoltán, Szeged, 2015. 1 2 Az előadás diasora (előre elérhető a teljes anyag, fejlesztések mindig történnek) Könyv: Török Miklós jegyzet Tiezte, Schenk, könyv interneten elérhető anyagok Laborjegyzet,
1. Irányítástechnika. Készítette: Fecser Nikolett. 2. Ipari elektronika. Készítette: Horváth Lászó
 A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
A mechatronikai technikus képzés átvilágítására és fejlesztésére irányuló projekt eredményeképp az egyes tantárgyakhoz új, disszeminációra alakalmas tanmeneteket dolgoztunk ki. 1. Irányítástechnika. Készítette:
Gingl Zoltán, Szeged, :47 Elektronika - Műveleti erősítők
 Gingl Zoltán, Szeged, 06. 06.. 3. 7:47 Elektronika - Műveleti erősítők 06.. 3. 7:47 Elektronika - Műveleti erősítők Passzív elemek nem lehet erősíteni, csi jeleket kezelni erősen korlátozott műveletek
Gingl Zoltán, Szeged, 06. 06.. 3. 7:47 Elektronika - Műveleti erősítők 06.. 3. 7:47 Elektronika - Műveleti erősítők Passzív elemek nem lehet erősíteni, csi jeleket kezelni erősen korlátozott műveletek
MECHATRONIKAI MÉRNÖKI ALAPKÉPZÉSI SZAK. 2. Az alapképzési szakon szerezhető végzettségi szint és a szakképzettség oklevélben szereplő megjelölése:
 MECHATRONIKAI MÉRNÖKI ALAPKÉPZÉSI SZAK 1. Az alapképzési szak megnevezése: mechatronikai mérnöki 2. Az alapképzési szakon szerezhető végzettségi szint és a szakképzettség oklevélben szereplő megjelölése:
MECHATRONIKAI MÉRNÖKI ALAPKÉPZÉSI SZAK 1. Az alapképzési szak megnevezése: mechatronikai mérnöki 2. Az alapképzési szakon szerezhető végzettségi szint és a szakképzettség oklevélben szereplő megjelölése:
670 milliszekundumos csomagolási ciklusidő
 670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
Járműinformatika A jármű elektronikus rendszerei
 Járműinformatika A jármű elektronikus rendszerei 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A jármű alrendszerei
Járműinformatika A jármű elektronikus rendszerei 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 A jármű alrendszerei
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
www.electromega.hu AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE
 AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE MI AZ AUTÓK LÉNYEGE? Rövid szabályozott robbanások sorozatán eljutni A -ból B -be. MI IS KELL EHHEZ? MOTOR melyben a robbanások erejéből adódó alternáló mozgást először
AZ ELEKTROMOS AUTÓZÁS ELŐNYEI, JÖVŐJE MI AZ AUTÓK LÉNYEGE? Rövid szabályozott robbanások sorozatán eljutni A -ból B -be. MI IS KELL EHHEZ? MOTOR melyben a robbanások erejéből adódó alternáló mozgást először
Szakképesítés: 54 523 01 Automatikai technikus Szóbeli vizsgatevékenység A vizsgafeladat megnevezése: Irányítástechnikai alapok, gyártórendszerek
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Mechatronikai technikus szakma gyakorlati oktatásához OKJ száma: 54 523 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Foglalkozási napló a 20 /20. tanévre Mechatronikai technikus szakma gyakorlati oktatásához OKJ száma: 54 523 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
10.1. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
101 ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel történik A feldolgozás előtt az analóg jeleket digitalizálni kell Rendszerint az
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
MOTOR HAJTÁS Nagyfeszültségű megszakító
 Forradalom a megszakító technológiában MOTOR HAJTÁS Nagyfeszültségű megszakító ABB HV Products - Page 1 Mi az a Motor Hajtás? ABB HV Products - Page 2 Energia Átvitel Energia Kioldás Energia Tárolás Energia
Forradalom a megszakító technológiában MOTOR HAJTÁS Nagyfeszültségű megszakító ABB HV Products - Page 1 Mi az a Motor Hajtás? ABB HV Products - Page 2 Energia Átvitel Energia Kioldás Energia Tárolás Energia
SOLART-SYSTEM KFT. Napenergiás berendezések tervezése és kivitelezése. 1112 Budapest XI. Gulyás u. 20 Telefon: 2461783 Telefax: 2461783
 30 ÉV Napenergiás berendezések tervezése és kivitelezése Több napelem, több energia Csak egyszer kell megvenni, utána a villany ingyen van! 1m 2 jóminőségű napelem egy évben akár 150 kwh villamos energiát
30 ÉV Napenergiás berendezések tervezése és kivitelezése Több napelem, több energia Csak egyszer kell megvenni, utána a villany ingyen van! 1m 2 jóminőségű napelem egy évben akár 150 kwh villamos energiát
Szabó Mihály. ABB Kft., 2013/05/09 Energiahatékonyság és termelékenység a hálózati csatlakozástól a gyártási folyamatokig
 Szabó Mihály. ABB Kft., 2013/05/09 Energiahatékonyság és termelékenység a hálózati csatlakozástól a gyártási folyamatokig May 15, 2013 Slide 1 Tartalomjegyzék Energiahatékonyság Termelés és átvitel Smart
Szabó Mihály. ABB Kft., 2013/05/09 Energiahatékonyság és termelékenység a hálózati csatlakozástól a gyártási folyamatokig May 15, 2013 Slide 1 Tartalomjegyzék Energiahatékonyság Termelés és átvitel Smart
Óbudai Egyetem Bánki D. Kar Gépészmérmök BSc
 l Óbudai Egyetem Bánki D. Kar Gépészmérmök BSc Természettudományos alapismeretek Sorszá m Kód 1 BGRMA1GNNC BGRMAGNNC BGBFG1NNC BGBMF1NNC BGBKE11NNC Tantárgyak Matematika I félév ea tgy Mérnöki fizika Mérnöki
l Óbudai Egyetem Bánki D. Kar Gépészmérmök BSc Természettudományos alapismeretek Sorszá m Kód 1 BGRMA1GNNC BGRMAGNNC BGBFG1NNC BGBMF1NNC BGBKE11NNC Tantárgyak Matematika I félév ea tgy Mérnöki fizika Mérnöki
TANTÁRGYI TEMATIKA. Félév (1/2/3) 2013/2014/2 JÁRMŰVILLAMOSSÁG ÉS ELEKTRONIKA. Beke Péter, Lőrincz Illés Előtanulmányi követelmények
 2013/2014/2 JÁRMŰVILLAMOSSÁG ÉS ELEKTRONIKA. Beke Péter, Lőrincz Illés Előtanulmányi követelmények") Oktatási hét TANTÁRGYI TEMATIKA Tantárgy kód NGB_KV009_2 Félév (1/2/3) 2013/2014/2 Tantárgy cím JÁRMŰVILLAMOSSÁG ÉS ELEKTRONIKA Tantárgy felelős Beke Péter Előadók Beke Péter, Lőrincz Illés Előtanulmányi
Oktatási hét TANTÁRGYI TEMATIKA Tantárgy kód NGB_KV009_2 Félév (1/2/3) 2013/2014/2 Tantárgy cím JÁRMŰVILLAMOSSÁG ÉS ELEKTRONIKA Tantárgy felelős Beke Péter Előadók Beke Péter, Lőrincz Illés Előtanulmányi
Versenyző kódja: 27 27/2012. (VIII. 27.) NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.
 NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.") 54 523 04-2017 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
54 523 04-2017 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Aszinkron motoros hajtás Matlab szimulációja
 Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált
 Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Mágnesesség, elektromágnes, indukció Tudománytörténeti háttér Már i. e. 600 körül Thalész felfedezte, hogy Magnesia város mellett vannak olyan talált ércek, amelyek vonzzák a vasat. Ezeket mágnesnek nevezték
Gyakorlat 30B-14. a F L = e E + ( e)v B képlet, a gravitációs erőt a (2.1) G = m e g (2.2)
v B képlet, a gravitációs erőt a (2.1) G = m e g (2.2)") 2. Gyakorlat 30B-14 Az Egyenlítőnél, a földfelszín közelében a mágneses fluxussűrűség iránya északi, nagysága kb. 50µ T,az elektromos térerősség iránya lefelé mutat, nagysága; kb. 100 N/C. Számítsuk ki,
2. Gyakorlat 30B-14 Az Egyenlítőnél, a földfelszín közelében a mágneses fluxussűrűség iránya északi, nagysága kb. 50µ T,az elektromos térerősség iránya lefelé mutat, nagysága; kb. 100 N/C. Számítsuk ki,
FELVÉTELI BEMENETI KÖVETELMÉNYEK A MISKOLCI EGYETEM MESTERKÉPZÉSI SZAKJAIRA
 FELVÉTELI BEMENETI KÖVETELMÉNYEK A MISKOLCI EGYETEM MESTERKÉPZÉSI SZAKJAIRA Teljes kreditértékkel Mesterszak beszámítható alapképzési szak GAZDASÁGTUDOMÁNYI KAR Marketing Nemzetközi gazdaság és gazdálkodás
FELVÉTELI BEMENETI KÖVETELMÉNYEK A MISKOLCI EGYETEM MESTERKÉPZÉSI SZAKJAIRA Teljes kreditértékkel Mesterszak beszámítható alapképzési szak GAZDASÁGTUDOMÁNYI KAR Marketing Nemzetközi gazdaság és gazdálkodás
DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel:
 + DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
+ DC motor= egyenáramú motor, villanymotor vezérlése micro:bittel: A motor egyfajta eszköz, amely az elektromágneses indukció szerint a villamos energiát kinetikus energiává alakíthatja át. Sokféle motor
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Elektromos ellenállás, az áram hatásai, teljesítmény
 Elektromos ellenállás, az áram hatásai, teljesítmény Elektromos ellenállás Az anyag részecskéi akadályozzák a töltések mozgását. Ezt a tulajdonságot nevezzük elektromos ellenállásnak. Annak a fogyasztónak
Elektromos ellenállás, az áram hatásai, teljesítmény Elektromos ellenállás Az anyag részecskéi akadályozzák a töltések mozgását. Ezt a tulajdonságot nevezzük elektromos ellenállásnak. Annak a fogyasztónak
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ
 X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
X. ANALÓG JELEK ILLESZTÉSE DIGITÁLIS ESZKÖZÖKHÖZ Ma az analóg jelek feldolgozása (is) mindinkább digitális eszközökkel és módszerekkel történik. A feldolgozás előtt az analóg jeleket digitalizálni kell.
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
A 146. sorszámú Mechatronikus-karbantartó megnevezésű szakképesítés szakmai és vizsgakövetelménye 1. AZ ORSZÁGOS KÉPZÉSI JEGYZÉKBEN SZEREPLŐ ADATOK
 A 146. sorszámú Mechatronikus-karbantartó megnevezésű szakképesítés szakmai és vizsgakövetelménye 1. AZ ORSZÁGOS KÉPZÉSI JEGYZÉKBEN SZEREPLŐ ADATOK 1.1. A szakképesítés azonosító száma: 34 523 01 1.2.
A 146. sorszámú Mechatronikus-karbantartó megnevezésű szakképesítés szakmai és vizsgakövetelménye 1. AZ ORSZÁGOS KÉPZÉSI JEGYZÉKBEN SZEREPLŐ ADATOK 1.1. A szakképesítés azonosító száma: 34 523 01 1.2.
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján.
 NFM rendelet szakmai és vizsgakövetelménye alapján.") 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 525 02 Gépjármű mechatronikus Tájékoztató A vizsgázó az első lapra írja fel a nevét!
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 525 02 Gépjármű mechatronikus Tájékoztató A vizsgázó az első lapra írja fel a nevét!
Moore & more than Moore
 1 Moore & more than Moore Fürjes Péter E-mail:, www.mems.hu 2 A SZILÍCIUM (silex) 3 A SZILÍCIUM Felfedező: Jons Berzelius 1823, Svédország Természetes előfordulás: gránit, kvarc, agyag, homok 2. leggyakoribb
1 Moore & more than Moore Fürjes Péter E-mail:, www.mems.hu 2 A SZILÍCIUM (silex) 3 A SZILÍCIUM Felfedező: Jons Berzelius 1823, Svédország Természetes előfordulás: gránit, kvarc, agyag, homok 2. leggyakoribb
Nagyállattenyésztési és Termeléstechnológiai Tanszék VILLAMOSÍTÁS. Gépjármű-villamosság. Készítette: Dr.Desztics Gyula
 Nagyállattenyésztési és Termeléstechnológiai Tanszék VILLAMOSÍTÁS Gépjármű-villamosság Készítette: Dr.Desztics Gyula Járművek elektromos berendezései A traktorok és közúti járművek villamos berendezései
Nagyállattenyésztési és Termeléstechnológiai Tanszék VILLAMOSÍTÁS Gépjármű-villamosság Készítette: Dr.Desztics Gyula Járművek elektromos berendezései A traktorok és közúti járművek villamos berendezései
Forgácsoló gyártócellák, gyártórendszerek 1.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
Az E-van kutatási projekt eredményei és haszna
 Az E-van kutatási projekt eredményei és haszna Hibrid kishaszonjármű fejlesztése a Széchenyi István Egyetemen Varga Zoltán PhD, okleveles gépészmérnök, Széchenyi István Egyetem Közúti és Vasúti Járművek
Az E-van kutatási projekt eredményei és haszna Hibrid kishaszonjármű fejlesztése a Széchenyi István Egyetemen Varga Zoltán PhD, okleveles gépészmérnök, Széchenyi István Egyetem Közúti és Vasúti Járművek
MECHATRONIKAI MÉRNÖKASSZISZTENS FELSŐFOKÚ SZAKKÉPZÉS TANTERVE
 PANNON EGYETEM MÉRNÖKI KAR MECHATRONIKAI MÉRNÖKASSZISZTENS FELSŐFOKÚ SZAKKÉPZÉS TANTERVE SZAKVEZETŐ: Dr. Gugolya Zoltán egyetemi adjunktus -------------------------------- -------------------------------------
PANNON EGYETEM MÉRNÖKI KAR MECHATRONIKAI MÉRNÖKASSZISZTENS FELSŐFOKÚ SZAKKÉPZÉS TANTERVE SZAKVEZETŐ: Dr. Gugolya Zoltán egyetemi adjunktus -------------------------------- -------------------------------------
Győr, az elektromos autók mintavárosa
 Hibrid és elektromos járművek fejlesztését megalapozó kutatások TÁMOP-4.2.2.A-11/1/KONV- 2012-0012 Smarter Transport Kooperatív közlekedési rendszerek infokommunikációs támogatása TÁMOP-4.2.2.C-11/1/KONV-
Hibrid és elektromos járművek fejlesztését megalapozó kutatások TÁMOP-4.2.2.A-11/1/KONV- 2012-0012 Smarter Transport Kooperatív közlekedési rendszerek infokommunikációs támogatása TÁMOP-4.2.2.C-11/1/KONV-
BEMUTATÓ FELADATOK (2) ÁLTALÁNOS GÉPTAN tárgyból
 ÁLTALÁNOS GÉPTAN tárgyból") BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
A munkavégzés a rendszer és a környezete közötti energiacserének a D hőátadástól eltérő valamennyi más formája.
 11. Transzportfolyamatok termodinamikai vonatkozásai 1 Melyik állítás HMIS a felsoroltak közül? mechanikában minden súrlódásmentes folyamat irreverzibilis. disszipatív folyamatok irreverzibilisek. hőmennyiség
11. Transzportfolyamatok termodinamikai vonatkozásai 1 Melyik állítás HMIS a felsoroltak közül? mechanikában minden súrlódásmentes folyamat irreverzibilis. disszipatív folyamatok irreverzibilisek. hőmennyiség
Toyota Hybrid Synergy Drive
 Toyota Hybrid Synergy Drive PRIUS prior, to go before Ahead of its time Jövő járműve Toyota Hybrid Synergy Drive Mi a hibrid járm? Bels égés motor + villamosmotor = Hibrid Hibrid Rendszerek Osztályai Visszatekintés
Toyota Hybrid Synergy Drive PRIUS prior, to go before Ahead of its time Jövő járműve Toyota Hybrid Synergy Drive Mi a hibrid járm? Bels égés motor + villamosmotor = Hibrid Hibrid Rendszerek Osztályai Visszatekintés
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.
 Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Tételek Elektrotechnika és elektronika I tantárgy szóbeli részéhez 1 1. AZ ELEKTROSZTATIKA ALAPJAI 8 1.1 AZ ELEKTROMOS TÖLTÉS FOGALMA 8 1.2 AZ ELEKTROMOS TÉR 9 1.3 COULOMB TÖRVÉNYE 10 1.4 AZ ELEKTROMOS
Mérnöki alapok 11. előadás
 Mérnöki alapok 11. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
Mérnöki alapok 11. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
FÜGGÔLEGES MEGMUNKÁLÓ KÖZPONT
 FÜGGÔLEGES MEGMUNKÁLÓ KÖZPONT MUNKAASZTAL: X/Y/Z ELMOZDULÁS: A.T.C.: GÉP ALAPTERÜLET forgácsszállító/kihordó szalaggal: A GÉP SÚLYA: GENOVA 20-AS TÍPUSÚ SZERSZÁMTÁR ATC. Karos típusú automatikus szerszámcserélõ
FÜGGÔLEGES MEGMUNKÁLÓ KÖZPONT MUNKAASZTAL: X/Y/Z ELMOZDULÁS: A.T.C.: GÉP ALAPTERÜLET forgácsszállító/kihordó szalaggal: A GÉP SÚLYA: GENOVA 20-AS TÍPUSÚ SZERSZÁMTÁR ATC. Karos típusú automatikus szerszámcserélõ
Aszinkrongépek működése, felépítése Készítette: Runyai Gábor 2006
 Aszinkrongépek működése, felépítése Készítette: Runyai GáborG 2006 Aszinkrongépek felépítése Állórész (stator) Anyaga öntöttvas, de lehet alumínium is. Lemezelt hornyaiban 1 vagy 3 fázisú tekercselés helyezkedik
Aszinkrongépek működése, felépítése Készítette: Runyai GáborG 2006 Aszinkrongépek felépítése Állórész (stator) Anyaga öntöttvas, de lehet alumínium is. Lemezelt hornyaiban 1 vagy 3 fázisú tekercselés helyezkedik
PEDAGÓGIAI PROGRAM ÓRATERVEK
 PEDAGÓGIAI PROGRAM ÓRATERVEK ÚJPESTI KÉT TANÍTÁSI NYELVŰ MŰSZAKI SZAKKÖZÉPISKOLA ÉS SZAKISKOLA 2014. 1 Tartalomjegyzék ÓRATERVEK A 2013. SZEPTEMBER 1. UTÁN INDULT OSZTÁLYOKNAK...3 Villamosipar és elektronika
PEDAGÓGIAI PROGRAM ÓRATERVEK ÚJPESTI KÉT TANÍTÁSI NYELVŰ MŰSZAKI SZAKKÖZÉPISKOLA ÉS SZAKISKOLA 2014. 1 Tartalomjegyzék ÓRATERVEK A 2013. SZEPTEMBER 1. UTÁN INDULT OSZTÁLYOKNAK...3 Villamosipar és elektronika
EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
 BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
BUDAPESTI MÛSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR VILLAMOS ENERGETIKA TANSZÉK Villamos gépek és hajtások csoport EGYENÁRAMÚ GÉP VIZSGÁLATA Laboratóriumi mérési útmutató
DENER Plazmavágók. Típus: Mitsubishi DNR-I 1530 CNC. Dener plazmavágás. Dener plazmavágók. http://www.dener.com/sayfa/89/plasma-cutting.
 DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
GÉPELEMEK 2. GYAKORLAT
 GÉPELEMEK 2. GYAKORLAT Összeállította: Kerényi György Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék, 4. Gépelemek 2. 1 4. Gépelemek 2. 2 Három feladat: ventillátor faipari
GÉPELEMEK 2. GYAKORLAT Összeállította: Kerényi György Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék, 4. Gépelemek 2. 1 4. Gépelemek 2. 2 Három feladat: ventillátor faipari
Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja
 bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel
bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel
TANTÁRGYLEÍRÁS. OKJ azonosító 01/1.0/1180-06 Tantárgy kódja Meghirdetés féléve 1. Kreditpont 2 Heti kontakt óraszám (elm.+gyak.
 Informatika alapok OKJ azonosító 01/1.0/1180-06 MC1101 Meghirdetés féléve 1. Kreditpont 2 Heti kontakt óraszám (elm.+gyak.) 0+2 Tantárgyfelelős neve és beosztása Ferenczi Ildikó mérnöktanár Számítógépet
Informatika alapok OKJ azonosító 01/1.0/1180-06 MC1101 Meghirdetés féléve 1. Kreditpont 2 Heti kontakt óraszám (elm.+gyak.) 0+2 Tantárgyfelelős neve és beosztása Ferenczi Ildikó mérnöktanár Számítógépet
Felvonók korszerő hajtása.
 Felvonók korszerő hajtása. A felvonók tömeges elterjedése szorosan összefügg a forgóáramú villamos hálózatok kialakulásával. Magyarországon az elsı villamos hálózatot 1884.-ben Temesváron állították fel.
Felvonók korszerő hajtása. A felvonók tömeges elterjedése szorosan összefügg a forgóáramú villamos hálózatok kialakulásával. Magyarországon az elsı villamos hálózatot 1884.-ben Temesváron állították fel.
Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
 A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
Mintaterv. PTE PMMIK - Tanulmányi tájékoztató 2012 - Gépipari mérnökasszisztens. Anyagtan és alkalmazások
 PTE PMMIK - Tanulmányi tájékoztató 0 - Gépipari mérnökasszisztens oldal / Mintaterv korszerű munkaszervezés Számítógépes és hálózati alapismeretek Felhasználói programok alkalmazása Környezet- és munkavédelem
PTE PMMIK - Tanulmányi tájékoztató 0 - Gépipari mérnökasszisztens oldal / Mintaterv korszerű munkaszervezés Számítógépes és hálózati alapismeretek Felhasználói programok alkalmazása Környezet- és munkavédelem
9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK
 9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK 1.A gyakorlat célja Az MPX12DP piezorezisztiv differenciális nyomásérzékelő tanulmányozása. A nyomás feszültség p=f(u) karakterisztika megrajzolása. 2. Elméleti
9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK 1.A gyakorlat célja Az MPX12DP piezorezisztiv differenciális nyomásérzékelő tanulmányozása. A nyomás feszültség p=f(u) karakterisztika megrajzolása. 2. Elméleti
Pozicionáló rendszerek Lineáris tengelyek KK sorozat
 3. 3.. KK lineáris modulok tulajdonságai HIWIN KK lineáris modulok kompakt pozicionáló tengelyek. z előtolást egy golyós menetes orsós hajtás biztosítja, amely a motor kész meghajtó-karimába kerül tárolásra.
3. 3.. KK lineáris modulok tulajdonságai HIWIN KK lineáris modulok kompakt pozicionáló tengelyek. z előtolást egy golyós menetes orsós hajtás biztosítja, amely a motor kész meghajtó-karimába kerül tárolásra.
OKJ 54 523 02 Elektronikai technikus Központi előírás szerint az elmélet/gyakorlat aránya 40/60%
 OKJ 54 523 02 Elektronikai technikus Központi előírás szerint az elmélet/gyakorlat aránya 40/60% 11500-12 Munkahelyi egészség és biztonság Munkahelyi egészség és biztonság 0,5 0,5 0,5 11499-12 Foglalkoztatás
OKJ 54 523 02 Elektronikai technikus Központi előírás szerint az elmélet/gyakorlat aránya 40/60% 11500-12 Munkahelyi egészség és biztonság Munkahelyi egészség és biztonság 0,5 0,5 0,5 11499-12 Foglalkoztatás
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Elektronika 11. évfolyam
 Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
Elektronika 11. évfolyam Áramköri elemek csoportosítása. (Aktív-passzív, lineáris- nem lineáris,) Áramkörök csoportosítása. (Aktív-passzív, lineáris- nem lineáris, kétpólusok-négypólusok) Két-pólusok csoportosítása.
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA
 ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
ELEKTROTECHNIKA-ELEKTRONIKA ELEKTROTECHNIKA 1. Egyenáramú körök Követelmények, matematikai alapok, prefixumok Töltés, áramerősség Feszültség Ellenállás és vezetés. Vezetők, szigetelők Áramkör fogalma Áramköri
EC-Motorok a légszállításban. villamosmérn. Budapest, 2008.04.01
 EC-Motorok a légszállításban Kovács Zoltán villamosmérn rnök Budapest, 2008.04.01 Bevezetés Az üzemeltetési költségek csökkentése. A működtetés szabályozhatóságának biztosítása. Elvárás: Összhangban van
EC-Motorok a légszállításban Kovács Zoltán villamosmérn rnök Budapest, 2008.04.01 Bevezetés Az üzemeltetési költségek csökkentése. A működtetés szabályozhatóságának biztosítása. Elvárás: Összhangban van
Jegyzetelési segédlet 8.
 Jegyzetelési segédlet 8. Informatikai rendszerelemek tárgyhoz 2009 Szerkesztett változat Géczy László Billentyűzet, billentyűk szabványos elrendezése funkció billentyűk ISO nemzetközi írógép alap billentyűk
Jegyzetelési segédlet 8. Informatikai rendszerelemek tárgyhoz 2009 Szerkesztett változat Géczy László Billentyűzet, billentyűk szabványos elrendezése funkció billentyűk ISO nemzetközi írógép alap billentyűk
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2016/2017. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül
 Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
Élettartam teszteknél alkalmazott programstruktúra egy váltóvezérlő példáján keresztül 1 Tartalom Miről is lesz szó? Bosch GS-TC Automata sebességváltó TCU (Transmission Control Unit) Élettartam tesztek
i i i Sebesség fokozat (előre-hátra) 2-2 2-2 4-4 Mechanikus átvitel n n i Inching pedál i i i
 2-2 2-2 4-4 Mechanikus átvitel n n i Inching pedál i i i") DIECI AGRI PIVOT törzscsuklós teleszkópos rakodó Műszaki jellemzők és alapfelszereltség: A DIECI - AGRI PIVOT egy könnyen manőverezhető és agilis munkagép család, mellyel szűk térben és akadályokkal tarkított
DIECI AGRI PIVOT törzscsuklós teleszkópos rakodó Műszaki jellemzők és alapfelszereltség: A DIECI - AGRI PIVOT egy könnyen manőverezhető és agilis munkagép család, mellyel szűk térben és akadályokkal tarkított
A 27/2012 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján.
 NGM rendelet szakmai és vizsgakövetelménye alapján.") A 27/202 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus Tájékoztató A vizsgázó az első lapra írja fel a
A 27/202 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus Tájékoztató A vizsgázó az első lapra írja fel a
KORLÁTOZOTT TERJESZTÉSŰ! A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 523 01 Mechatronikus-karbantartó
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 523 01 Mechatronikus-karbantartó
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
A kísérlet, mérés megnevezése célkitűzései: Váltakozó áramú körök vizsgálata, induktív ellenállás mérése, induktivitás értelmezése.
 A kísérlet, mérés megnevezése célkitűzései: Váltakozó áramú körök vizsgálata, induktív ellenállás mérése, induktivitás értelmezése. Eszközszükséglet: tanulói tápegység funkcionál generátor tekercsek digitális
A kísérlet, mérés megnevezése célkitűzései: Váltakozó áramú körök vizsgálata, induktív ellenállás mérése, induktivitás értelmezése. Eszközszükséglet: tanulói tápegység funkcionál generátor tekercsek digitális
Programozható Vezérlő Rendszerek. Hardver
 Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
CNC programozás. Alap ismeretek. Készített: Hatos István
 CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
33 522 01 0000 00 00 Elektronikai műszerész Elektronikai műszerész
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
Analóg elektronika - laboratóriumi gyakorlatok
 Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Analóg elektronika - laboratóriumi gyakorlatok. Mûveleti erõsítõk egyenáramú jellemzése és alkalmazásai. Elmélet Az erõsítõ fogalmát valamint az integrált mûveleti erõsítõk szerkezetét és viselkedését
Automatikai műszerész Automatikai műszerész
 A /2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A /2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
Oszcillátorok. Párhuzamos rezgőkör L C Miért rezeg a rezgőkör?
 Oszcillátorok Párhuzamos rezgőkör L C Miért rezeg a rezgőkör? Töltsük fel az ábrán látható kondenzátor egy megadott U feszültségre, majd zárjuk az áramkört az ábrán látható módon. Mind a tekercsen, mind
Oszcillátorok Párhuzamos rezgőkör L C Miért rezeg a rezgőkör? Töltsük fel az ábrán látható kondenzátor egy megadott U feszültségre, majd zárjuk az áramkört az ábrán látható módon. Mind a tekercsen, mind
AIRPOL PRM frekvenciaváltós csavarkompresszorok. Airpol PRM frekvenciaváltós csavarkompresszorok
 Airpol PRM frekvenciaváltós csavarkompresszorok Az Airpol PRM frekvenciaváltós csavarkompresszorok változtatható sebességű meghajtással rendelkeznek 50-100%-ig. Ha a sűrített levegő fogyasztás kevesebb,
Airpol PRM frekvenciaváltós csavarkompresszorok Az Airpol PRM frekvenciaváltós csavarkompresszorok változtatható sebességű meghajtással rendelkeznek 50-100%-ig. Ha a sűrített levegő fogyasztás kevesebb,
Elıadás a Pannon Egyetem Kihívások a mőszaki szakemberképzésben címő fórum alkalmából kivonat
 Elıadás a Pannon Egyetem Kihívások a mőszaki szakemberképzésben címő fórum alkalmából kivonat Elıadó: Pápai Tamás ügyvezetı igazgató Continental Teves Magyarország Kft. 2009. február 9. Fontosabb adatok
Elıadás a Pannon Egyetem Kihívások a mőszaki szakemberképzésben címő fórum alkalmából kivonat Elıadó: Pápai Tamás ügyvezetı igazgató Continental Teves Magyarország Kft. 2009. február 9. Fontosabb adatok
Mechatronika alapjai órai jegyzet
 - 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
- 1969-ben alakult ki a szó - Rendszerek és folyamatok, rendszertechnika - Automatika, szabályozás - számítástechnika Cd olvasó: Dia Mechatronika alapjai órai jegyzet Minden mechatronikai rendszer alapstruktúrája
Energiamegtakarítás SULZER HST Turbókompresszorokkal
 Energiamegtakarítás SULZER HST Turbókompresszorokkal Szennyvíztisztítás Üzemeltetési Költségeinek Csökkentése Szakmai Nap Budapest, 2018. április 19. Miért a sűrített levegő ellátás? Szennyvíztisztító
Energiamegtakarítás SULZER HST Turbókompresszorokkal Szennyvíztisztítás Üzemeltetési Költségeinek Csökkentése Szakmai Nap Budapest, 2018. április 19. Miért a sűrített levegő ellátás? Szennyvíztisztító
(Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.)
 könyvéből vannak.)") Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Műanyagipari Kereskedelmi BT
 Műanyagipari Kereskedelmi BT FULL SHINE Extrúziós flakonfúvó gépek H tipuscsalád A Full Shine (Tajvan) H Széria flakonfúvó gépek alkalmasak 0.2 10 L űrméretű különféle műanyag flakonok gyártására. lehet
Műanyagipari Kereskedelmi BT FULL SHINE Extrúziós flakonfúvó gépek H tipuscsalád A Full Shine (Tajvan) H Széria flakonfúvó gépek alkalmasak 0.2 10 L űrméretű különféle műanyag flakonok gyártására. lehet
Irányítástechnika 12. évfolyam
 Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
Irányítástechnika 12. évfolyam Irányítástechnikai alapismeretek Az irányítás fogalma. Irányítási példák. Az irányítás részműveletei: Érzékelés (információszerzés). Ítéletalkotás (az megszerzett információ
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK
 6203-11 modul ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK I. rész ÉPÜLETGÉPÉSZETI ELEKTROMOS SZERELÉSEK II. RÉSZ VEZÉRLÉS ÉS SZABÁLYOZÁSTECHNIKA TARTALOMJEGYZÉKE Szerkesztette: I. Rész: Tolnai
6203-11 modul ÉPÜLETGÉPÉSZETI ELEKTROMOS ÉS SZABÁLYOZÓ RENDSZEREK I. rész ÉPÜLETGÉPÉSZETI ELEKTROMOS SZERELÉSEK II. RÉSZ VEZÉRLÉS ÉS SZABÁLYOZÁSTECHNIKA TARTALOMJEGYZÉKE Szerkesztette: I. Rész: Tolnai
Mérés és adatgyűjtés
 Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
Mérés és adatgyűjtés 7. óra Mingesz Róbert Szegedi Tudományegyetem 2013. április 11. MA - 7. óra Verzió: 2.2 Utolsó frissítés: 2013. április 10. 1/37 Tartalom I 1 Szenzorok 2 Hőmérséklet mérése 3 Fény
Megújuló energiaforrások
 Megújuló energiaforrások Energiatárolási módok Marcsa Dániel Széchenyi István Egyetem Automatizálási Tanszék 2015 tavaszi szemeszter Energiatárolók 1) Akkumulátorok: ólom-savas 2) Akkumulátorok: lítium-ion
Megújuló energiaforrások Energiatárolási módok Marcsa Dániel Széchenyi István Egyetem Automatizálási Tanszék 2015 tavaszi szemeszter Energiatárolók 1) Akkumulátorok: ólom-savas 2) Akkumulátorok: lítium-ion
Programozható irányító berendezések és szenzorrendszerek. Az ipari irányítástechnika gyakorlati eszközei Végrehajtók, beavatkozók
 Programozható irányító berendezések és szenzorrendszerek Szabályozási kör hatásvázlata Az ipari irányítástechnika gyakorlati eszközei Végrehajtók, beavatkozók X a : alapjel X v : végrehajtójel X m : módosított
Programozható irányító berendezések és szenzorrendszerek Szabályozási kör hatásvázlata Az ipari irányítástechnika gyakorlati eszközei Végrehajtók, beavatkozók X a : alapjel X v : végrehajtójel X m : módosított
Eco-Jet és Hydrojet - kör alapú, szabadon álló zsírleválasztó polietilén tartállyal
 Teljes ürítésű Eco-Jet és Hydrojet - kör alapú, szabadon álló zsírleválasztó polietilén tartállyal ACO termékelőnyök Szegmensekre bontható kialakítás, melynek következtében kis ajtónyílásokon keresztül
Teljes ürítésű Eco-Jet és Hydrojet - kör alapú, szabadon álló zsírleválasztó polietilén tartállyal ACO termékelőnyök Szegmensekre bontható kialakítás, melynek következtében kis ajtónyílásokon keresztül
Lipurex és Lipurat ovális, szabadon álló zsírleválasztó rozsdamentes acél tartállyal
 Teljes ürítésű Lipurex és Lipurat ovális, szabadon álló zsírleválasztó rozsdamentes acél tartállyal ACO termékelőnyök Robusztus szerkezet 25 éves stabilitási igazolással Ürítés és karbantartás költsége
Teljes ürítésű Lipurex és Lipurat ovális, szabadon álló zsírleválasztó rozsdamentes acél tartállyal ACO termékelőnyök Robusztus szerkezet 25 éves stabilitási igazolással Ürítés és karbantartás költsége
Aktuátorok korszerű anyagai. Készítette: Tomozi György
 Aktuátorok korszerű anyagai Készítette: Tomozi György Technológiai fejlődés iránya Mikro nanotechnológia egyre kisebb aktuátorok egyre gyorsabb aktuátorok nem feltétlenül villamos, hanem egyéb csatolás
Aktuátorok korszerű anyagai Készítette: Tomozi György Technológiai fejlődés iránya Mikro nanotechnológia egyre kisebb aktuátorok egyre gyorsabb aktuátorok nem feltétlenül villamos, hanem egyéb csatolás