Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja
|
|
|
- Kornélia Vörösné
- 7 évvel ezelőtt
- Látták:
Átírás


1 bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám
2 Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel a hazai alternatív hajtású járművek versenyein és a nemzetközi Formula Student versenysorozatban. Olyan innovatív technológiákat alkalmazunk, amelyek személyautókban is felhasználhatók.
3 bmemotion Csapattagok: Diákok és oktatók: Villamosmérnök Gépészmérnök Közlekedésmérnök Közgazdász
4 Az autó tervezése Kerékagymotoros? Kevesebb mechanikai veszteség Több hasznos térfogat Zéró direkt emisszió Nagy rugózatlan tömeg és tehetetlenségi nyomaték Nehézkes hűtés és energiaátvitel


5 Kerékagymotorok Teljesen saját villamos és gépész fejlesztésű Analitikus tervezés, végeselemes szimulációk Nagy nyomaték, kiemelkedő hatásfok Saját motorvezérlő egység MAGYARORSZÁGON AZ ELSŐ NAGYTELJESÍTMÉNYŰ KERÉKAGYMOTOR! Szimulációs vizsgálatok Mérési eredmények: Üresjárási és rövidzárási mérések Üresjárási feszültség
6 Kerékagymotorok
7 Kerékagymotorok Kerékagymotor Állandómágneses szinkron kerékagymotorok Teljesen saját fejlesztés Két hátsó kerékbe szereljük Külső forgórész, vízhűtés 1 motor adatai: (autóban 2db) Főbb paraméterek (1 motor) Látszólagos teljesítmény Folyamatos Túlterhelt 21 kva 57 kva Hatásos teljesítmény 17 kw 22,5 kw Névleges feszültség (DC sín) 380 V 380 V Áram 48 A 120 A Frekvencia 266,7 Hz Teljesítmény tényező 0,79 0,46 Névleges fordulatszám 760 rpm 440 rpm Hatásfok 0,96 0,86 Nyomaték 215 Nm 485 Nm
8 Az autó tervezése

9 A futóművek tervezése Futómű 2D optimalizációja szimbolikus megoldóval Skeleton váz építése top-down design

10 Futóművek tervezése

11 Futóművek tervezése Hátsó Futómű Negyedjármű modell
 Lináris és nem-lineáris eredmények kiértékelése Alacsony gépigény Sokféle statikus és dinamikus tesztelési lehetőség, elsősorban futóműre és")
12 Adams/Car Főbb jellemzők: Egyszerű és gyors modellezés Kapcsolat más 3D tervezőrendszerekkel és szimulációs programokkal (MATLAB, Patran stb.) Lináris és nem-lineáris eredmények kiértékelése Alacsony gépigény Sokféle statikus és dinamikus tesztelési lehetőség, elsősorban futóműre és járműmodellre optimalizálva
13 Adams/Car Járműdinamikai szimulációk készítése: 1. Futómű geometria meghatározása 2. Járműmodell beállítása 3. Statikus és dinamikus futómű szimulációk készítése 5. Menetdinamikai szimulációk készítése 6. Eredmények kiértékelése, animációk készítése 7. Javaslatok a geometria átalakítására, módosítására
14 Adams/Car A futóművek modellezése Adams/Car környezetben Első futómű
15 Adams/Car A futóművek modellezése Adams/Car környezetben Hátsó futómű
16 Adams/Car A járműmodell felépítése Adams/Car-ban
17 Statikus szimulációk Futóműparaméterek meghatározása: Kerékdőlés Nyomtávváltozás Kerékösszetartás Csapterpesztés Csaphátradőlés Utánfutás Kormánylegördülési sugár

18 Statikus szimulációk Berugózás és nyomtávváltozás egyenlő terhelés esetén
19 Statikus szimulációk Kerékösszetartás-változás egyenletes terhelés esetén
20 Statikus szimulációk Berugózás és nyomtávváltozás egyenlő terhelés esetén
21 Statikus szimulációk Kerékösszetartás-változás egyenletes terhelés esetén
22 Dinamikus szimulációk Kerekek külön, tetszőleges függvény szerint gerjeszthetők: Rezonanciafrekvencia meghatározása Alkatrészekre ható dinamikus terhelések megállapítása
23 Menetdinamikai szimulációk Adams/Car segítségével különféle szimulációk végezhetők el a járműmodellen: Gyorsítás/Lassítás Fékezés, kanyarodás, drift és ezek kombinációja Tetszőleges pályán elvégezhető szimulációk - RoadBuilder SmartDriver Path Optimization
24 Menetdinamikai szimulációk
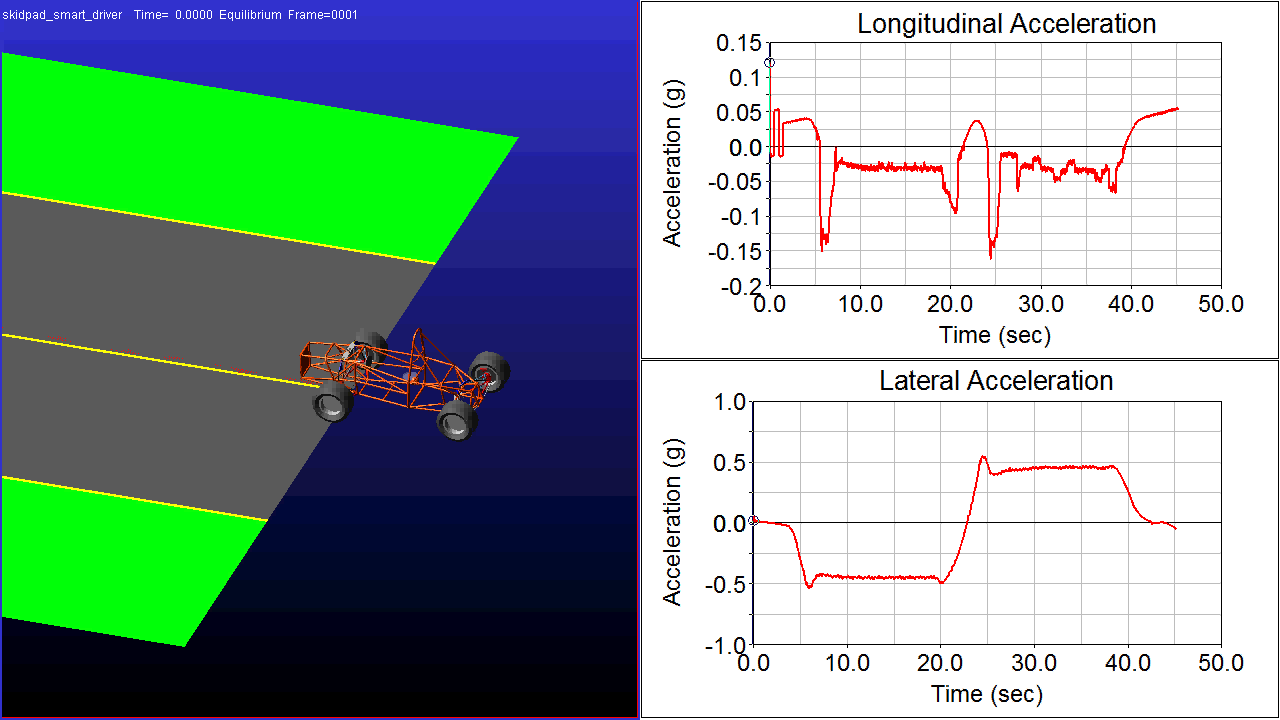
25 Menetdinamikai szimuláció
26 Szimulációk értékelése Hátul nagy rugózatlan tömeg rugókarakterisztika optimalizálása volt szükséges Nyomatékvektoros szabályozás (Torque Vectoring) szükséges a menetdinamikai stabilitás növelése érdekében Szimulációk is bizonyították a farnehéz autó hátrányait A jármű keresztstabilitása nagy mértékben javul stabilizátor (anti roll bar) hatására
27 Fejleszthetőségi lehetőségek 4 kerékagymotoros autó Kerékagymotor fejlesztés Aktív futómű Vezetéknélküli kommunikáció a járműben A jármű könnyítése (kompozit, titán alkatrészek)
28 Úton..


29 Köszönjük a figyelmet! FACEBOOK.COM/BME.MOTION
bmemotion Kerékagymotoros hajtású villamos versenyautó fejlesztés a Budapesti Műszaki Egyetemen Dr. Balázs Gergely György
 bmemotion Kerékagymotoros hajtású villamos versenyautó fejlesztés a Budapesti Műszaki Egyetemen Dr. Balázs Gergely György bmemotion Fő célunk: Nevünk: Villamos hajtású versenyautó tervezése és építése,
bmemotion Kerékagymotoros hajtású villamos versenyautó fejlesztés a Budapesti Műszaki Egyetemen Dr. Balázs Gergely György bmemotion Fő célunk: Nevünk: Villamos hajtású versenyautó tervezése és építése,
Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja. Készítette: Vidovics Lajos
 Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja Készítette: Vidovics Lajos Hajtáslánc építés fázisai irodalomkutatás, hajtáslánc koncepciók képzése, pneumatikus elemek kiválasztása,
Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja Készítette: Vidovics Lajos Hajtáslánc építés fázisai irodalomkutatás, hajtáslánc koncepciók képzése, pneumatikus elemek kiválasztása,
Győr, az elektromos autók mintavárosa
 Hibrid és elektromos járművek fejlesztését megalapozó kutatások TÁMOP-4.2.2.A-11/1/KONV- 2012-0012 Smarter Transport Kooperatív közlekedési rendszerek infokommunikációs támogatása TÁMOP-4.2.2.C-11/1/KONV-
Hibrid és elektromos járművek fejlesztését megalapozó kutatások TÁMOP-4.2.2.A-11/1/KONV- 2012-0012 Smarter Transport Kooperatív közlekedési rendszerek infokommunikációs támogatása TÁMOP-4.2.2.C-11/1/KONV-
Hírlevél. 2014 Január
 Hírlevél 2014 Január Tisztelt Olvasó! A 2014-es év első hónapjának középpontjában a design áll, hiszen a január elején megrendezett Design Freeze keretein belül bemutattuk az idei autónk terveit. A csapattagok
Hírlevél 2014 Január Tisztelt Olvasó! A 2014-es év első hónapjának középpontjában a design áll, hiszen a január elején megrendezett Design Freeze keretein belül bemutattuk az idei autónk terveit. A csapattagok
Háromfázisú aszinkron motorok
 Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
Háromfázisú aszinkron motorok 1. példa Egy háromfázisú, 20 kw teljesítményű, 6 pólusú, 400 V/50 Hz hálózatról üzemeltetett aszinkron motor fordulatszáma 950 1/min. Teljesítmény tényezője 0,88, az állórész
HIBRIDJÁRMŰ FEJLESZTÉS GYŐRBEN
 HIBRIDJÁRMŰ FEJLESZTÉS GYŐRBEN KÍSÉRLETI CÉLÚ ELEKTROMOS MEGHAJTÁSÚ EGYETEMI JÁRMŰVEK Szauter Ferenc - Dr. Varga Zoltán - Willisits Vilmos Széchenyi István Egyetem Willisits Mérnökiroda Kft. Járműipari
HIBRIDJÁRMŰ FEJLESZTÉS GYŐRBEN KÍSÉRLETI CÉLÚ ELEKTROMOS MEGHAJTÁSÚ EGYETEMI JÁRMŰVEK Szauter Ferenc - Dr. Varga Zoltán - Willisits Vilmos Széchenyi István Egyetem Willisits Mérnökiroda Kft. Járműipari
 1 2 3 4 5 A B 6 7 8 9 [Nm] 370 350 330 310 290 270 250 [kw] [PS] 110 150 100 136 90 122 80 109 70 95 230 210 60 82 190 170 150 50 40 68 54 130 110 90 140 PS 100 PS 125 PS 30 20 41 27 70 1000 1500 2000
1 2 3 4 5 A B 6 7 8 9 [Nm] 370 350 330 310 290 270 250 [kw] [PS] 110 150 100 136 90 122 80 109 70 95 230 210 60 82 190 170 150 50 40 68 54 130 110 90 140 PS 100 PS 125 PS 30 20 41 27 70 1000 1500 2000
 1 2 3 4 5 7 9 A B 10 11 12 13 14 15 16 17 18 19 [Nm] 370 350 330 310 290 270 250 230 210 190 170 150 130 110 90 140 PS 100 PS 125 PS 70 1000 1500 2000 2500 3000 3500 4000 RPM [kw] [PS] 110 150 100 136
1 2 3 4 5 7 9 A B 10 11 12 13 14 15 16 17 18 19 [Nm] 370 350 330 310 290 270 250 230 210 190 170 150 130 110 90 140 PS 100 PS 125 PS 70 1000 1500 2000 2500 3000 3500 4000 RPM [kw] [PS] 110 150 100 136
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
 1 2 3 4 5 6 7 A B 8 9 10 11 [Nm] 370 [kw] [PS] 110 150 350 330 310 100 136 90 122 290 270 80 109 250 70 95 230 210 60 82 190 50 68 170 150 40 54 130 110 90 140 PS 125 PS 100 PS 30 20 41 27 70 1000 1500
1 2 3 4 5 6 7 A B 8 9 10 11 [Nm] 370 [kw] [PS] 110 150 350 330 310 100 136 90 122 290 270 80 109 250 70 95 230 210 60 82 190 50 68 170 150 40 54 130 110 90 140 PS 125 PS 100 PS 30 20 41 27 70 1000 1500
 2 3 4 5 6 7 8 9 A B A B 11 12 13 [Nm] 370 350 330 310 290 270 250 230 210 190 [kw] [PS] 110 150 100 136 90 122 80 109 70 95 60 82 50 68 170 150 40 54 130 110 90 140 PS 85 PS 110 PS 70 1000 1500 2000 2500
2 3 4 5 6 7 8 9 A B A B 11 12 13 [Nm] 370 350 330 310 290 270 250 230 210 190 [kw] [PS] 110 150 100 136 90 122 80 109 70 95 60 82 50 68 170 150 40 54 130 110 90 140 PS 85 PS 110 PS 70 1000 1500 2000 2500
 1 2 3 4 5 6 7 112 8 9 10 11 12 13 [Nm] 400 375 350 325 300 275 250 225 200 175 150 125 114 kw 92 kw 74 kw [155 PS] [125 PS] [100 PS] kw [PS] 140 [190] 130 [176] 120 [163] 110 [149] 100 [136] 90 [122] 80
1 2 3 4 5 6 7 112 8 9 10 11 12 13 [Nm] 400 375 350 325 300 275 250 225 200 175 150 125 114 kw 92 kw 74 kw [155 PS] [125 PS] [100 PS] kw [PS] 140 [190] 130 [176] 120 [163] 110 [149] 100 [136] 90 [122] 80
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók
 Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
Motortechnológiák és különböző motortechnológiákhoz illeszthető frekvenciaváltók Elektronikus akadémia 2017, Zajácz János 1 Danfoss Drives drives.danfoss.hu Az aktuális kérdés: Hatékonyság Miért? Mivel?
AMBER ONE PROJEKT: ELEKTROMOS SPORTAUTÓ FEJLESZTÉS EGY ÉV ALATT NULLÁRÓL
 AMBER ONE PROJEKT: ELEKTROMOS SPORTAUTÓ FEJLESZTÉS EGY ÉV ALATT NULLÁRÓL Jármű szintű parametrikus modellezés a hatékony munka érdekében Előadók: Székely Béla, Székely András TARTALOM Amber One Projekt
AMBER ONE PROJEKT: ELEKTROMOS SPORTAUTÓ FEJLESZTÉS EGY ÉV ALATT NULLÁRÓL Jármű szintű parametrikus modellezés a hatékony munka érdekében Előadók: Székely Béla, Székely András TARTALOM Amber One Projekt
Aszinkron motoros hajtás Matlab szimulációja
 Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
Aszinkron motoros hajtás Matlab szimulációja Az alábbiakban bemutatjuk egy MATLAB programban modellezett 147,06 kw teljesítményű aszinkron motoros hajtás modelljének felépítését, rendszertechnikáját és
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Speciális autóalkatrészek gyártása
 Speciális autóalkatrészek gyártása A Budapesti Mőszaki és Gazdaságtudományi Egyetem Formula Racing Team csapata a BME-FRT, 2007 elsı hónapjaiban alakult azzal a céllal, hogy sikeresen vegyen részt a Formula
Speciális autóalkatrészek gyártása A Budapesti Mőszaki és Gazdaságtudományi Egyetem Formula Racing Team csapata a BME-FRT, 2007 elsı hónapjaiban alakult azzal a céllal, hogy sikeresen vegyen részt a Formula
 2 51 3 4 5 6 7 8 9 10 11 12 13 14 15 [Nm] 350 330 310 290 270 250 230 210 190 170 150 130 110 90 70 130 PS 110 PS 85 PS [kw] [PS] 100 136 90 122 80 109 70 95 60 82 50 68 40 54 30 41 20 27 10 14 [Nm] 400
2 51 3 4 5 6 7 8 9 10 11 12 13 14 15 [Nm] 350 330 310 290 270 250 230 210 190 170 150 130 110 90 70 130 PS 110 PS 85 PS [kw] [PS] 100 136 90 122 80 109 70 95 60 82 50 68 40 54 30 41 20 27 10 14 [Nm] 400
Elektromos hajtású tanszéki versenyautó járműdinamikai modellezése Vehicle dynamics modelling of an electric driven race car
 Elektromos hajtású tanszéki versenyautó járműdinamikai modellezése Vehicle dynamics modelling of an electric driven race car A. SZÁNTÓ 1, G. Á. SZÍKI 2, S. HAJDU 3 1Debreceni Egyetem, szanto930922@freemail.hu
Elektromos hajtású tanszéki versenyautó járműdinamikai modellezése Vehicle dynamics modelling of an electric driven race car A. SZÁNTÓ 1, G. Á. SZÍKI 2, S. HAJDU 3 1Debreceni Egyetem, szanto930922@freemail.hu
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
Érzékelők és beavatkozók DC motorok 3. rész egyetemi docens - 1 - DC motorvezérlés H-híd: +V r Motor mozgatás előre Motor mozgatás hátra Fékezés Szabadonfutás a vezérlés függvényében UL LL + Ø - UR LR
A JÁRMŰIPARI KUTATÓKÖZPONT MEGHATÁROZÓ TEVÉKENYSÉGEI JÁRMŰIPARI KUTATÓKÖZPONT VILLAMOS JÁRMŰHAJTÁSOK ÉS HAJTÁSIRÁNYÍTÁS KUTATÁS-FEJLESZTÉSE
 SZElectra JÁRMŰIPARI KUTATÓKÖZPONT A Járműipari Kutatóközpont (JKK) a győri Széchenyi István Egyetem önálló kutatási egysége, amelynek küldetése a fenntartható közlekedés támogatása hibrid és villamos
SZElectra JÁRMŰIPARI KUTATÓKÖZPONT A Járműipari Kutatóközpont (JKK) a győri Széchenyi István Egyetem önálló kutatási egysége, amelynek küldetése a fenntartható közlekedés támogatása hibrid és villamos
Toyota Hybrid Synergy Drive
 Toyota Hybrid Synergy Drive PRIUS prior, to go before Ahead of its time Jövő járműve Toyota Hybrid Synergy Drive Mi a hibrid járm? Bels égés motor + villamosmotor = Hibrid Hibrid Rendszerek Osztályai Visszatekintés
Toyota Hybrid Synergy Drive PRIUS prior, to go before Ahead of its time Jövő járműve Toyota Hybrid Synergy Drive Mi a hibrid járm? Bels égés motor + villamosmotor = Hibrid Hibrid Rendszerek Osztályai Visszatekintés
1. Bevezete s A. SZÁNTÓ 1, G. Á. SZÍKI 2, K. SARVAJCZ 3
 Dinamikus tesztek soros gerjeszte su DC motoron. A motorral hajtott ja rmu fe keze se nek szimula cio ja. Dynamic Tests on a Series Wound DC Motor. Simulation of the Braking of the Vehicle Driven by the
Dinamikus tesztek soros gerjeszte su DC motoron. A motorral hajtott ja rmu fe keze se nek szimula cio ja. Dynamic Tests on a Series Wound DC Motor. Simulation of the Braking of the Vehicle Driven by the
Tápegység tervezése. A felkészüléshez szükséges irodalom Alkalmazandó műszerek
 Tápegység tervezése Bevezetés Az elektromos berendezések működéséhez szükséges energiát biztosító források paraméterei gyakran különböznek a berendezés részegységeinek követelményeitől. A megfelelő paraméterű
Tápegység tervezése Bevezetés Az elektromos berendezések működéséhez szükséges energiát biztosító források paraméterei gyakran különböznek a berendezés részegységeinek követelményeitől. A megfelelő paraméterű
Ejtési teszt modellezése a tervezés fázisában
 Antal Dániel, doktorandusz, Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szabó Tamás, egyetemi docens, Ph.D., Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szilágyi Attila, egyetemi adjunktus,
Antal Dániel, doktorandusz, Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szabó Tamás, egyetemi docens, Ph.D., Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szilágyi Attila, egyetemi adjunktus,
FORD RANGER Ranger_2013.5_Cover_V2.indd 1 20/12/2012 14:57
 FORD RANGER 1 2 3 4 5 1.8 m3 6 7 8 9 10 11 3 7 8 5 1 2 4 6 9 10 12 13 3500kg 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 28 29 29 30 [Nm] 475 450 425 400 375 350 325 [kw] [PS] 180 245 165 224 150 204
FORD RANGER 1 2 3 4 5 1.8 m3 6 7 8 9 10 11 3 7 8 5 1 2 4 6 9 10 12 13 3500kg 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 28 29 29 30 [Nm] 475 450 425 400 375 350 325 [kw] [PS] 180 245 165 224 150 204
Villamos gépek tantárgy tételei
 10. tétel Milyen mérési feladatokat kell elvégeznie a kördiagram megszerkesztéséhez? Rajzolja meg a kördiagram felhasználásával a teljes nyomatéki függvényt! Az aszinkron gép egyszerűsített kördiagramja
10. tétel Milyen mérési feladatokat kell elvégeznie a kördiagram megszerkesztéséhez? Rajzolja meg a kördiagram felhasználásával a teljes nyomatéki függvényt! Az aszinkron gép egyszerűsített kördiagramja
Mérnöki alapok 4. előadás
 Mérnöki alapok 4. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80
Mérnöki alapok 4. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80
Az E-van kutatási projekt eredményei és haszna
 Az E-van kutatási projekt eredményei és haszna Hibrid kishaszonjármű fejlesztése a Széchenyi István Egyetemen Varga Zoltán PhD, okleveles gépészmérnök, Széchenyi István Egyetem Közúti és Vasúti Járművek
Az E-van kutatási projekt eredményei és haszna Hibrid kishaszonjármű fejlesztése a Széchenyi István Egyetemen Varga Zoltán PhD, okleveles gépészmérnök, Széchenyi István Egyetem Közúti és Vasúti Járművek
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL
 SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Számítógéppel segített tervezés oktatása BME Gép- és Terméktervezés Tanszékén. Dr. Körtélyesi Gábor Farkas Zsolt BME Gép és Terméktervezés Tanszék
 Számítógéppel segített tervezés oktatása BME Gép- és Terméktervezés Tanszékén Dr. Körtélyesi Gábor Farkas Zsolt BME Gép és Terméktervezés Tanszék Gödöllő. 2009. 01.22. Tervezési lépések Háttér: eszközök,
Számítógéppel segített tervezés oktatása BME Gép- és Terméktervezés Tanszékén Dr. Körtélyesi Gábor Farkas Zsolt BME Gép és Terméktervezés Tanszék Gödöllő. 2009. 01.22. Tervezési lépések Háttér: eszközök,
Projektfeladatok 2014, tavaszi félév
 Projektfeladatok 2014, tavaszi félév Gyakorlatok Félév menete: 1. gyakorlat: feladat kiválasztása 2-12. gyakorlat: konzultációs rendszeres beszámoló a munka aktuális állásáról (kötelező) 13-14. gyakorlat:
Projektfeladatok 2014, tavaszi félév Gyakorlatok Félév menete: 1. gyakorlat: feladat kiválasztása 2-12. gyakorlat: konzultációs rendszeres beszámoló a munka aktuális állásáról (kötelező) 13-14. gyakorlat:
Rajzolja le és jegyezze meg a szinkron generátor modell-ábráját az inverterével, a sebesség-, és az áramvektorszabályozóval.
 Tevékenység: Rajzolja le és jegyezze meg a szinkron generátor modell-ábráját az inverterével, a sebesség-, és az áramvektorszabályozóval. Tanulmányozza és jegyezze meg: A járműhajtás modelljének alrendszereit,
Tevékenység: Rajzolja le és jegyezze meg a szinkron generátor modell-ábráját az inverterével, a sebesség-, és az áramvektorszabályozóval. Tanulmányozza és jegyezze meg: A járműhajtás modelljének alrendszereit,
CITROËN JUMPER Tehergépkocsi
 CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2017 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2017 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
Elektromos járművek Elektromos hajtásláncok szimulációja és optimalizációja
 Elektromos járművek Elektromos hajtásláncok szimulációja és optimalizációja Kőrös Péter Közúti és Vasúti Járművek Tanszék / JKK Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp
Elektromos járművek Elektromos hajtásláncok szimulációja és optimalizációja Kőrös Péter Közúti és Vasúti Járművek Tanszék / JKK Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp
Formula Student versenyautó futóművének tervezése
 Gépészmérnöki és Informatikai Kar Gép- és Terméktervezési Intézet SZAKDOLGOZAT Formula Student versenyautó futóművének tervezése KÉSZÍTETTE: Zabos Tamás Géptervező hallgató GE8UJY KONZULENS: Dr. Bihari
Gépészmérnöki és Informatikai Kar Gép- és Terméktervezési Intézet SZAKDOLGOZAT Formula Student versenyautó futóművének tervezése KÉSZÍTETTE: Zabos Tamás Géptervező hallgató GE8UJY KONZULENS: Dr. Bihari
 2 59 1 3 4 5 6 7 8 99 10 11 12 13 14 New Transit Van 15 16 New Transit Van 17 18 New Transit Van 19 20 New Transit Van 21 22 23 24 25 [Nm] 370 [kw] [PS] 110 150 [Nm] 475 [kw] [PS] 180 245 [Nm] 250 [kw]
2 59 1 3 4 5 6 7 8 99 10 11 12 13 14 New Transit Van 15 16 New Transit Van 17 18 New Transit Van 19 20 New Transit Van 21 22 23 24 25 [Nm] 370 [kw] [PS] 110 150 [Nm] 475 [kw] [PS] 180 245 [Nm] 250 [kw]
Műszaki diagnosztika Elektromos hajtáslánc mérései és a mérési eredmények felhasználása szimulációs modellekhez és méretezési munkákhoz
 Műszaki diagnosztika Elektromos hajtáslánc mérései és a mérési eredmények felhasználása szimulációs modellekhez és méretezési munkákhoz Kőrös Péter Közúti és Vasúti Járművek Tanszék / JKK Tanszéki mérnök
Műszaki diagnosztika Elektromos hajtáslánc mérései és a mérési eredmények felhasználása szimulációs modellekhez és méretezési munkákhoz Kőrös Péter Közúti és Vasúti Járművek Tanszék / JKK Tanszéki mérnök
Témák 2014/15/1. Dr. Ruszinkó Endre, egyetemi docens
 Témák 2014/15/1 Dr. Ruszinkó Endre, egyetemi docens 1. A V6 Otto motorok gyártása során fellépő hibatípusok elemzése 2. Szelepgyűrű megmunkálás optimális folyamatának kidolgozása 3. Szerszámcsere folyamatának
Témák 2014/15/1 Dr. Ruszinkó Endre, egyetemi docens 1. A V6 Otto motorok gyártása során fellépő hibatípusok elemzése 2. Szelepgyűrű megmunkálás optimális folyamatának kidolgozása 3. Szerszámcsere folyamatának
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
Szívókönyökök veszteségeinek és sebességprofiljainak vizsgálata CFD szimuláció segítségével
 GANZ ENGINEERING ÉS ENERGETIKAI GÉPGYÁRTÓ KFT. Szívókönyökök veszteségeinek és sebességprofiljainak vizsgálata CFD szimuláció segítségével Készítette: Bogár Péter Háznagy Gergely Egyed Csaba Zombor Csaba
GANZ ENGINEERING ÉS ENERGETIKAI GÉPGYÁRTÓ KFT. Szívókönyökök veszteségeinek és sebességprofiljainak vizsgálata CFD szimuláció segítségével Készítette: Bogár Péter Háznagy Gergely Egyed Csaba Zombor Csaba
CITROËN JUMPER Tehergépkocsi
 CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2013. február Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998
CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2013. február Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998
Mérnöki alapok 11. előadás
 Mérnöki alapok 11. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
Mérnöki alapok 11. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
 Marcsa Dániel Transzformátor - példák 1. feladat : Egyfázisú transzformátor névleges teljesítménye 125kVA, a feszültsége U 1 /U 2 = 5000/400V. A névleges terheléshez tartozó tekercsveszteség 0,06S n, a
Marcsa Dániel Transzformátor - példák 1. feladat : Egyfázisú transzformátor névleges teljesítménye 125kVA, a feszültsége U 1 /U 2 = 5000/400V. A névleges terheléshez tartozó tekercsveszteség 0,06S n, a
Széchenyi István Egyetem Műszaki Tudományi Kar
 Széchenyi István Egyetem Műszaki Tudományi Kar Az Egyetem oktatási egységei Műszaki Tudományi Kar (az egyetem hallgatóinak 2/3-a) Gazdaságtudományi Kar Állam- és Jogtudományi Kar Egészségügyi és Szociális
Széchenyi István Egyetem Műszaki Tudományi Kar Az Egyetem oktatási egységei Műszaki Tudományi Kar (az egyetem hallgatóinak 2/3-a) Gazdaságtudományi Kar Állam- és Jogtudományi Kar Egészségügyi és Szociális
Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára. Ütemterv
 1 éves, járműmérnöki BSc szakos hallgatók számára. Ütemterv") Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára Ütemterv Tanulmányi Előadás Gyakorlat hét 1 Feltételek ismertetése. Gépkocsi története. Járműtípusok Számpéldák
Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára Ütemterv Tanulmányi Előadás Gyakorlat hét 1 Feltételek ismertetése. Gépkocsi története. Járműtípusok Számpéldák
 2 3 4 5 6 7 8 10 12 13 112 14 15 16 17 [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] 380 140 [190] 380 140 [190] 380 140 [190] 340 120 [163] 340 120 [163] 340 120 [163]
2 3 4 5 6 7 8 10 12 13 112 14 15 16 17 [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] 380 140 [190] 380 140 [190] 380 140 [190] 340 120 [163] 340 120 [163] 340 120 [163]
ÚJ CITROËN JUMPER Tehergépkocsi
 ÚJ CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2014 új Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998 max.
ÚJ CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2014 új Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998 max.
FORD TRANSIT VAN Transit_Van_13.25_V3_3mm_Covers.indd 1-3 09/08/2012 10:33
 1 10 2 3 4 5 6 7 8 9 A B 10 11 12 13 14 15 16 17 18 19 [Nm] 370 350 330 310 290 270 250 230 210 190 170 150 130 110 90 140 PS 100 PS 125 PS [kw] [PS] 110 150 100 136 90 122 80 109 70 60 50 40 30 20 95
1 10 2 3 4 5 6 7 8 9 A B 10 11 12 13 14 15 16 17 18 19 [Nm] 370 350 330 310 290 270 250 230 210 190 170 150 130 110 90 140 PS 100 PS 125 PS [kw] [PS] 110 150 100 136 90 122 80 109 70 60 50 40 30 20 95
ÚJ! Fluke 438-II Hálózat- minőség és motor analizátor
 Ismerje meg villamos motorja teljesítőképességét mechanikus érzékelők használata nélkül ÚJ! Fluke 438-II Hálózat- minőség és motor analizátor Végezzen hibakeresést közvetlenül, on-line, üzemben lévő motorján
Ismerje meg villamos motorja teljesítőképességét mechanikus érzékelők használata nélkül ÚJ! Fluke 438-II Hálózat- minőség és motor analizátor Végezzen hibakeresést közvetlenül, on-line, üzemben lévő motorján
Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei
 Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei Paraméter Érték Leírás F0.00 F0.02 0 Billentyűzet potméter 4 Külső potméter VC1 bemenetre 0 Vezérlés billentyűzetről 1 Vezérlés sorkapcsokról 3 Vezérlés
Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei Paraméter Érték Leírás F0.00 F0.02 0 Billentyűzet potméter 4 Külső potméter VC1 bemenetre 0 Vezérlés billentyűzetről 1 Vezérlés sorkapcsokról 3 Vezérlés
1. Mozgás Magyar Attila
 1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) és a 29/2016 (VIII.26) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS!
 Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
Termékéletciklus-kezelésen alapuló számítógépes tervezés
 Termékéletciklus-kezelésen alapuló számítógépes tervezés Dr. Váradi Károly Farkas Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék, Piros Attila C3D Műszaki Tanácsadó
Termékéletciklus-kezelésen alapuló számítógépes tervezés Dr. Váradi Károly Farkas Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék, Piros Attila C3D Műszaki Tanácsadó
KÖSZÖNTJÜK HALLGATÓINKAT!
 2010. november 10. KÖSZÖNTJÜK HALLGATÓINKAT! Önök Dr. Horváth Zoltán Módszerek, amelyek megváltoztatják a világot A számítógépes szimuláció és optimalizáció jelentősége c. előadását hallhatják! 1 Módszerek,
2010. november 10. KÖSZÖNTJÜK HALLGATÓINKAT! Önök Dr. Horváth Zoltán Módszerek, amelyek megváltoztatják a világot A számítógépes szimuláció és optimalizáció jelentősége c. előadását hallhatják! 1 Módszerek,
1. Cím: Smart autonóm járműbemutató, RECAR (Autonóm Járművek Kutató központ)
") 1. Cím: Smart autonóm járműbemutató, RECAR (Autonóm Járművek Kutató központ) Smart autonóm jármű bemutató, RECAR (Autonóm Járművek Kutató központ). Az autonóm járművek a közeljövőben forradalmasítják az
1. Cím: Smart autonóm járműbemutató, RECAR (Autonóm Járművek Kutató központ) Smart autonóm jármű bemutató, RECAR (Autonóm Járművek Kutató központ). Az autonóm járművek a közeljövőben forradalmasítják az
EFOP DISZRUPTÍV TECHNOLÓGIÁK KUTATÁS-FEJLESZTÉSE AZ E-MOBILITY TERÜLETÉN ÉS INTEGRÁLÁSUK A MÉRNÖKKÉPZÉSBE
 SZTE Innovációs nap Szeged, 2017 május 30. EFOP-3.6.1-16-2016-00014 DISZRUPTÍV TECHNOLÓGIÁK KUTATÁS-FEJLESZTÉSE AZ E-MOBILITY TERÜLETÉN ÉS INTEGRÁLÁSUK A MÉRNÖKKÉPZÉSBE Dr. Weltsch Zoltán Pallasz Athéné
SZTE Innovációs nap Szeged, 2017 május 30. EFOP-3.6.1-16-2016-00014 DISZRUPTÍV TECHNOLÓGIÁK KUTATÁS-FEJLESZTÉSE AZ E-MOBILITY TERÜLETÉN ÉS INTEGRÁLÁSUK A MÉRNÖKKÉPZÉSBE Dr. Weltsch Zoltán Pallasz Athéné
A mikro-chp rendszerek alkalmazhatósága a decentralizált energiatermelésben
 A mikro-chp rendszerek alkalmazhatósága a decentralizált energiatermelésben Karacsi Márk PhD hallgató, Alkalmazott Informatikai Doktori Iskola, Óbudai Egyetem karacsi@gmail.com 61. MEE Vándorgyűlés Debrecen,
A mikro-chp rendszerek alkalmazhatósága a decentralizált energiatermelésben Karacsi Márk PhD hallgató, Alkalmazott Informatikai Doktori Iskola, Óbudai Egyetem karacsi@gmail.com 61. MEE Vándorgyűlés Debrecen,
4. /ÁK Adja meg a villamos áramkör passzív építő elemeit!
 Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
Áramkörök 1. /ÁK Adja meg a mértékegységek lehetséges prefixumait (20db)! 2. /ÁK Értelmezze az ideális feszültség generátor fogalmát! 3. /ÁK Mit ért valóságos feszültség generátor alatt? 4. /ÁK Adja meg
 2 3 4 5 6 7 8 10 12 13 112 14 15 16 17 [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] 380 140 [190] 380 140 [190] 380 140 [190] 340 120 [163] 340 120 [163] 340 120 [163]
2 3 4 5 6 7 8 10 12 13 112 14 15 16 17 [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] 380 140 [190] 380 140 [190] 380 140 [190] 340 120 [163] 340 120 [163] 340 120 [163]
CAD Rendszerek II. Adaptív tervezés Bottum-up - top-down design
 CAD Rendszerek II. Adaptív tervezés Bottum-up - top-down design Farkas Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék 1/ 20 Tartalom Mechanizmusok tervezése, Mechanizmusok
CAD Rendszerek II. Adaptív tervezés Bottum-up - top-down design Farkas Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék 1/ 20 Tartalom Mechanizmusok tervezése, Mechanizmusok
Rugalmas tengelykapcsoló mérése
 BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Közlekedésmérnöki Kar Budapesti Mőszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki Kar Jármőelemek és Hajtások Tanszék Jármőelemek és Hajtások Tanszék
BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Közlekedésmérnöki Kar Budapesti Mőszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki Kar Jármőelemek és Hajtások Tanszék Jármőelemek és Hajtások Tanszék
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.
 NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján.") A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 522 01 Erősáramú elektrotechnikus
II G Exe II T3. SPARK-S/Ex TÍPUSÚ TETŐVENTILÁTOROK. Alkalmazási terület. Felépítés
 SPARK-S/Ex TÍPUSÚ TETŐVENTILÁTOROK Alkalmazási terület II G Exe II T3 A SPARK robbanásbiztos ventilátorokat olyan területen alkalmazzuk, ahol a szállított levegő tűzveszélyes alkotóelemeket tartalmaz,
SPARK-S/Ex TÍPUSÚ TETŐVENTILÁTOROK Alkalmazási terület II G Exe II T3 A SPARK robbanásbiztos ventilátorokat olyan területen alkalmazzuk, ahol a szállított levegő tűzveszélyes alkotóelemeket tartalmaz,
Kulcsfogalmak: energiairányítási vagy menedzsment, BMS akkumenedzsment
 Hibrid gépjárművek számítógép irányítású rendszereinek modellezése. MATLAB szimulációs vizsgálati lehetőségek áttekintése egy soros-párhuzamos rendszerű hibrid hajtású személygépkocsira A lecke célja a
Hibrid gépjárművek számítógép irányítású rendszereinek modellezése. MATLAB szimulációs vizsgálati lehetőségek áttekintése egy soros-párhuzamos rendszerű hibrid hajtású személygépkocsira A lecke célja a
VÁLTAKOZÓ ÁRAMÚ KÖRÖK
 Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
Számítsuk ki a 80 mh induktivitású ideális tekercs reaktanciáját az 50 Hz, 80 Hz, 300 Hz, 800 Hz, 1200 Hz és 1,6 khz frekvenciájú feszültséggel táplált hálózatban! Sorosan kapcsolt C = 700 nf, L=600 mh,
BEMUTATÓ FELADATOK (2) ÁLTALÁNOS GÉPTAN tárgyból
 ÁLTALÁNOS GÉPTAN tárgyból") BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
LG Startvert ig5a frekvenciaváltó program paraméterek magyarázata
 1 A dokumentum szerzıi jog védelme alatt áll, mindenféle másolása, terjesztése jogi következményeket von maga után! LG Startvert ig5a frekvenciaváltó program paraméterek magyarázata 1. Motorhajtás paraméter
1 A dokumentum szerzıi jog védelme alatt áll, mindenféle másolása, terjesztése jogi következményeket von maga után! LG Startvert ig5a frekvenciaváltó program paraméterek magyarázata 1. Motorhajtás paraméter
A hatékony mérnöki tervezés eszközei és módszerei a gyakorlatban
 A hatékony mérnöki tervezés eszközei és módszerei a gyakorlatban Korszerű mérnöki technológiák (CAD, szimuláció, stb.) alkalmazásának bemutatása a készülékfejlesztés kapcsán Előadó: Szarka Zsolt H-TEC
A hatékony mérnöki tervezés eszközei és módszerei a gyakorlatban Korszerű mérnöki technológiák (CAD, szimuláció, stb.) alkalmazásának bemutatása a készülékfejlesztés kapcsán Előadó: Szarka Zsolt H-TEC
Időtartam Tanársegéd, adjunktus, főiskolai docens, egyetemi docens. önálló nyelvhasználó. önálló nyelvhasználó
 Europass Önéletrajz Személyi adatok Vezetéknév / Utónév(ek) VARGA ZOLTÁN Cím(ek) 9083 Écs Kossuth 47. Telefonszám(ok) Munkahelyi (9:00 16:00): 96 613564 Fax(ok) E-mail(ek) 96 613677 (munkahelyi) vargaz.sze@gmail.com
Europass Önéletrajz Személyi adatok Vezetéknév / Utónév(ek) VARGA ZOLTÁN Cím(ek) 9083 Écs Kossuth 47. Telefonszám(ok) Munkahelyi (9:00 16:00): 96 613564 Fax(ok) E-mail(ek) 96 613677 (munkahelyi) vargaz.sze@gmail.com
- HTTE - Hidrogéntermelı tároló egység (járművek meghajtásához) Szerzı:
 Szerzı:") - HTTE - Hidrogéntermelı tároló egység (járművek meghajtásához) Szerzı: Dr. Kulcsár Sándor Accusealed Kft. Az energiatermelés problémája a tárolás. A hidrogén alkalmazásánál két feladatot kell megoldani:
- HTTE - Hidrogéntermelı tároló egység (járművek meghajtásához) Szerzı: Dr. Kulcsár Sándor Accusealed Kft. Az energiatermelés problémája a tárolás. A hidrogén alkalmazásánál két feladatot kell megoldani:
Járművek lengései. Gépjármű Futóművek II. Szabó Bálint
 Járművek lengései Gépjármű Futóművek II. Szabó Bálint 1 Bevezetés 2 2 Bevezetés Koordináta-rendszerek Gyakran alkalmazott koordináta rendszer 3 SAE koordináta rendszer 3 Bevezetés Dinamikai irányok felbontása
Járművek lengései Gépjármű Futóművek II. Szabó Bálint 1 Bevezetés 2 2 Bevezetés Koordináta-rendszerek Gyakran alkalmazott koordináta rendszer 3 SAE koordináta rendszer 3 Bevezetés Dinamikai irányok felbontása
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 6. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Weldi-Plas termékcsalád - Plazmavágók
 Weldi-Plas termékcsalád - Plazmavágók A plazmasugaras vágási technológiával olcsón, pontosan és jó minőségben darabolhatók a fémes anyagok (acélok, nemesacélok, réz és alumínium ötvöztek) 45 mm vastagságig.
Weldi-Plas termékcsalád - Plazmavágók A plazmasugaras vágási technológiával olcsón, pontosan és jó minőségben darabolhatók a fémes anyagok (acélok, nemesacélok, réz és alumínium ötvöztek) 45 mm vastagságig.
A felharmonikus torzítás frekvenciaváltós szemszögből
 A felharmonikus torzítás frekvenciaváltós szemszögből Zajácz János, Hajtástechnikai szaktanácsadó VLT Drives www.danfoss.hu/vlt A felharmonikus torzításról általánosan Teljesítménytényezők értelmezése
A felharmonikus torzítás frekvenciaváltós szemszögből Zajácz János, Hajtástechnikai szaktanácsadó VLT Drives www.danfoss.hu/vlt A felharmonikus torzításról általánosan Teljesítménytényezők értelmezése
CITROËN JUMPER Tehergépkocsi
 CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2016 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2016 Motor BlueHDi 110 BlueHDi 130 BlueHDi 160 hengerek száma 4 4 4 hengerűrtartalom (cm 3 ) 1997 1997 1997 max. teljesítmény KW / LE (ford./perc) 81 / 110
Wigner Jenő Műszaki, Informatikai Középiskola és Kollégium // OKJ: Elektronikai technikus szakképesítés.
 1 rész 090006 090006/1gy nap nap nap 4. nap 5. nap 6. nap tevékenység 2014.05.13 2014.06.11 2014.06.12 Internetről szakmai dokumentumok letöltése, belőle prezentáció készítése VIZSGAREND A vizsgaszervező
1 rész 090006 090006/1gy nap nap nap 4. nap 5. nap 6. nap tevékenység 2014.05.13 2014.06.11 2014.06.12 Internetről szakmai dokumentumok letöltése, belőle prezentáció készítése VIZSGAREND A vizsgaszervező
Formula 1-es első szárny tervezésee TDK Dolgozat
 Formula 1-es első szárny tervezésee TDK Dolgozat Készítették: Ivády Dániel Bence FAMPDF és Kurdi Péter JDN8CN Konzulensek: Lukács Eszter Nagy László Áramlástan Tanszék Áramlástan Tanszék Budapest, 2011.11.09.
Formula 1-es első szárny tervezésee TDK Dolgozat Készítették: Ivády Dániel Bence FAMPDF és Kurdi Péter JDN8CN Konzulensek: Lukács Eszter Nagy László Áramlástan Tanszék Áramlástan Tanszék Budapest, 2011.11.09.
ABT Q7. East European Central
 ABT Q7 East European Central ABT BR könnyűfém keréktárcsa. Gyémánttal megmunkált vagy magasfényű polírozással, választható rejtett szeleppel, súlycsökkentett és tökéletes kezelhetőség. AZ ABT AS7. Kivételes
ABT Q7 East European Central ABT BR könnyűfém keréktárcsa. Gyémánttal megmunkált vagy magasfényű polírozással, választható rejtett szeleppel, súlycsökkentett és tökéletes kezelhetőség. AZ ABT AS7. Kivételes
Helyesbítés MOVITRAC B * _1014*
 Hajtástechnika \ hajtásautomatizálás \ rendszerintegráció \ szolgáltatások *211952_1014* Helyesbítés SEW-EURODRIVE GmbH & Co KG P.O. Box 02 76642 Bruchsal/Germany Phone +49 7251 75-0 Fax +49 7251-1970
Hajtástechnika \ hajtásautomatizálás \ rendszerintegráció \ szolgáltatások *211952_1014* Helyesbítés SEW-EURODRIVE GmbH & Co KG P.O. Box 02 76642 Bruchsal/Germany Phone +49 7251 75-0 Fax +49 7251-1970
MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny. Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR
 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR Szakképesítés: SZVK rendelet száma: Komplex írásbeli: Számolási, szerkesztési, szakrajzi feladatok
MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő KOMPLEX ÍRÁSBELI FELADATSOR Szakképesítés: SZVK rendelet száma: Komplex írásbeli: Számolási, szerkesztési, szakrajzi feladatok
AZ E-MOBILITÁS KOMPLEX KIHÍVÁSAI: ELEKTROMOBILITÁS AZ OKTATÁSBAN, FEJLESZTÉSBEN, MÉDIÁBAN, FÓRUMOKON
 AZ E-MOBILITÁS KOMPLEX KIHÍVÁSAI: ELEKTROMOBILITÁS AZ OKTATÁSBAN, FEJLESZTÉSBEN, MÉDIÁBAN, FÓRUMOKON Dr. Czinege Imre Professor Emeritus Széchenyi István Egyetem Járműipari Kutatóközpont Budapest, 2016.
AZ E-MOBILITÁS KOMPLEX KIHÍVÁSAI: ELEKTROMOBILITÁS AZ OKTATÁSBAN, FEJLESZTÉSBEN, MÉDIÁBAN, FÓRUMOKON Dr. Czinege Imre Professor Emeritus Széchenyi István Egyetem Járműipari Kutatóközpont Budapest, 2016.
Megújuló energiaforrások
 Megújuló energiaforrások Energiatárolási módok Marcsa Dániel Széchenyi István Egyetem Automatizálási Tanszék 2015 tavaszi szemeszter Energiatárolók 1) Akkumulátorok: ólom-savas 2) Akkumulátorok: lítium-ion
Megújuló energiaforrások Energiatárolási módok Marcsa Dániel Széchenyi István Egyetem Automatizálási Tanszék 2015 tavaszi szemeszter Energiatárolók 1) Akkumulátorok: ólom-savas 2) Akkumulátorok: lítium-ion
Osvald Ferenc. A súlypont szerepe - gépjármű közlekedés kicsit másként
 Osvald Ferenc A súlypont szerepe - gépjármű közlekedés kicsit másként Több tűzoltó gépjármű baleset után heves érzelmi reakcióktól mentesen - érdemes megvizsgálni miben más ezek vezetése? Igazságügyi szakértőt
Osvald Ferenc A súlypont szerepe - gépjármű közlekedés kicsit másként Több tűzoltó gépjármű baleset után heves érzelmi reakcióktól mentesen - érdemes megvizsgálni miben más ezek vezetése? Igazságügyi szakértőt
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Elektromos gép- és készülékszerelő szakma gyakorlati oktatásához OKJ száma: 34 522 02 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Foglalkozási napló a 20 /20. tanévre Elektromos gép- és készülékszerelő szakma gyakorlati oktatásához OKJ száma: 34 522 02 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Mechatronika, Optika és Gépészeti Informatika Tanszék MOTOR - BOARD
 echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
echatronika, Optika és Gépészeti Informatika Tanszék OTOR - BORD I. Elméleti alapok a felkészüléshez 1. vizsgált berendezés mérést a HPS System Technik (www.hps-systemtechnik.com) rendszereszközök segítségével
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
 2 3 4 6 7 8 10 12 13 112 14 15 16 17 18 19 [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] 380 140 [190] 380 140 [190] 380 140 [190] 340 120 [163] 340 120 [163] 340 120
2 3 4 6 7 8 10 12 13 112 14 15 16 17 18 19 [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] [Nm] 420 kw [PS] 160 [218] 380 140 [190] 380 140 [190] 380 140 [190] 340 120 [163] 340 120 [163] 340 120
Mechatronikai és Logisztikai Kiválósági Központ eredményei, beszámoló a vállalt feladatokról
 Mechatronikai és Logisztikai Kiválósági Központ eredményei, beszámoló a vállalt feladatokról Prof. Dr. Illés Béla dékán, tanszékvezető egyetemi tanár Miskolc, 2012.06.05. Prezentáció felépítése Kiválósági
Mechatronikai és Logisztikai Kiválósági Központ eredményei, beszámoló a vállalt feladatokról Prof. Dr. Illés Béla dékán, tanszékvezető egyetemi tanár Miskolc, 2012.06.05. Prezentáció felépítése Kiválósági
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
+ Egyszeres muködésu szögletes henger: +Tömlohenger: (17. ábra) Jellemzok
 Jellemzok") 19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
Villamos motor diagnosztikája Deákvári József dr. Földesi István FVM Mezőgazdasági Gépesítési Intézet
 - 1 - Deákvári József dr. Földesi István FVM Mezőgazdasági Gépesítési Intézet 1. Összefoglaló A modern diagnosztikai mérőeszközökkel egyszerűen megoldható a villamos forgógépek helyszíni vizsgálata, a
- 1 - Deákvári József dr. Földesi István FVM Mezőgazdasági Gépesítési Intézet 1. Összefoglaló A modern diagnosztikai mérőeszközökkel egyszerűen megoldható a villamos forgógépek helyszíni vizsgálata, a
A Fóti Élhető Jövő Park kisfeszültségű hálózati szimulátora. MEE Vándorgyűlés 2015.09.17. Kertész Dávid ELMŰ Nyrt. Sasvári Gergely ELMŰ Nyrt.
 A Fóti Élhető Jövő Park kisfeszültségű hálózati szimulátora MEE Vándorgyűlés 2015.09.17. Kertész Dávid ELMŰ Nyrt. Sasvári Gergely ELMŰ Nyrt. Tartalom 1 2 3 4 5 6 7 Célok Az eszköz bemutatása A leképzett
A Fóti Élhető Jövő Park kisfeszültségű hálózati szimulátora MEE Vándorgyűlés 2015.09.17. Kertész Dávid ELMŰ Nyrt. Sasvári Gergely ELMŰ Nyrt. Tartalom 1 2 3 4 5 6 7 Célok Az eszköz bemutatása A leképzett
MTZ 320 MTZ 320 MÛSZAKI ADATOK MÉRETEK ÉS TÖMEGADATOK MOTOR ERÕÁTVITEL KORMÁNYMÛ HAJTOTT ELSÕ TENGELY ELEKTROMOS BERENDEZÉSEK FÉKBERENDEZÉS
 MTZ 320 vízhûtéses dízelmotor. LDW1503CHD Teljesítmény, kw (LE): 22 (30) Névleges fordulatszám, ford/min: 3 000 Hengerek száma: 3 Furat löket, mm: 88 85 Hengerûrtartalom, cm 3 : 1 551 Maximális nyomaték,
MTZ 320 vízhûtéses dízelmotor. LDW1503CHD Teljesítmény, kw (LE): 22 (30) Névleges fordulatszám, ford/min: 3 000 Hengerek száma: 3 Furat löket, mm: 88 85 Hengerûrtartalom, cm 3 : 1 551 Maximális nyomaték,