Ipari robotok megfogó szerkezetei
|
|
|
- Alexandra Horváthné
- 7 évvel ezelőtt
- Látták:
Átírás

1 IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József
2 Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó szerkezetek kialakítása és összehasonlításuk 4. Rugalmas megfogó szerkezetek 5. Megfogó szerkezetek cserélhetősége 6. Megfogáshoz szükséges szorítóerő számítása
 tárgyak közötti kapcsolat létrehozása ( pl. szerelés, hegesztés, csavarozás, stb.). Az ipari robotok megfogó szerkezetei az effectorok közé tartoznak.")
3 Az effector/effektor az ipari robot azon szerkezeti egysége, amely a tárggyal közvetlenül kapcsolódik. Feladata: tárgyak megfogása, tárgyak megmunkálása (pl. fúrás, köszörülés, stb.) tárgyak közötti kapcsolat létrehozása ( pl. szerelés, hegesztés, csavarozás, stb.). Az ipari robotok megfogó szerkezetei az effectorok közé tartoznak.
4 Effektor: szerszám megfogó szerkezet Megfogó szerkezet Ipari robotok megfogó szerkezetei A robotok megfogó szerkezetei alkalmazkodnak az általuk kiszolgált technológiai folyamathoz. Mivel az emberi kéz munkavégző képességét és mozgásait igyekszenek másolni, az emberi kéz mozgását leképző szerkezet lenne a legkedvezőbb, ez azonban nehezen valósítható meg.

5 A kiválasztás (tervezés) legfontosabb fázisai: a megfogási, kezelési feladat analízise, a megfogó szerkezet rendszerbe integrálása, a megfogó szerkezet funkcionális rendszerének kiválasztása, a legkedvezőbb, optimális megfogó szerkezet kiválasztása.
6 Ipari robotok megfogó szerkezeteinek fogalma A megfogószerkezet az ipari robot azon szerkezeti egysége, eleme, amely a mozgatandó, manipulálandó tárggyal közvetlen kapcsolatban van, azt megfogja, biztosan megtartja, az előírt helyzetbe hozza, majd leteszi (elengedi).
.")
7 A megfogó szerkezetek részei: a megfogó egység (ez közvetlenül érintkezik a tárggyal), a mozgató egység (feladata a megfogó egység mozgatása). Ipari robotok megfogó szerkezetei
8 Megfogó szerkezetek csoportosítása Osztályozási szempontok: a tárgy és a megfogószerkezet kapcsolatának jellege szerint a megfogási elv szerint a rugalmasság (flexibilitás) szerint. A tárgy és a megfogó szerkezet kapcsolatának jellege szerint megkülönböztetnek: alakkal erővel adhézióval létesített kapcsolatot
9 Alakzáró megfogás Az alakkal létesített kapcsolat esetén, az un. alakzáró erőátvitelnél a megfogó pofák (megfogó ujjak) és a tárgy között csak normálerők adódnak át. Alakzáró megfogás
10 Az erővel létesített kapcsolat esetén az erőátvitelt a súrlódó erők biztosítják. A megfogandó tárgy súlyerő vektora merőleges a megfogó pofák szorítóerejét létrehozó elmozdulás síkjára. Ipari robotok megfogó szerkezetei Erőátvitellel létesített kapcsolat A megfogás feltétele: G = m * g 4 * µ * F
11 Megfogó szerkezetek csoportosítása A megfogási elv alapján megkülönböztetnek: mechanikus pneumatikus ( pl. vákuumos) elektromos (pl. mágneses) megfogó szerkezeteket. Működési elv: Vákuumos megfogók
12 Megfogó szerkezetek csoportosítása Az általános ipari alkalmazásoknál a leggyakrabban mechanikus megfogó szerkezeteket használnak. A sokféle konstrukciós megoldás az alábbi három típusok valamelyikébe sorolható: Olló- és fogó típusúak, Satupofa (párhuzampofás) típusúak, Hárompontos megfogó szerkezetek.
13 Mechanikus megfogó szerkezetek Olló-, fogó típusú mechanikus megfogó szerkezetek

14 Mechanikus megfogó szerkezetek Olló-, fogó típusú mechanikus megfogó szerkezetek Fogó típusú megfogó szerkezet
15 Mechanikus megfogó szerkezetek Satupofa típusú mechanikus megfogó szerkezetek

16 Mechanikus megfogó szerkezetek Satupofa típusú mechanikus megfogó szerkezetek

17 Mechanikus megfogó szerkezetek összehasonlítása
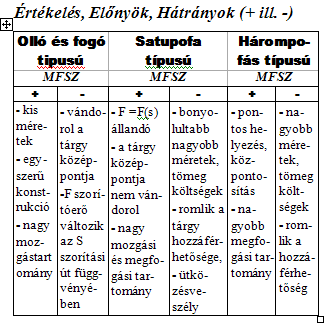
18
19 Szorítóerő változása a szorítási út függvényében
20 Részegységei Megfogóegység Mozgatóegység Érzékelők (szenzorok) Érzékelők (szenzorok): - van-e munkadarab a megfogóban - csúszás slip-szenzor - erőszenzorok
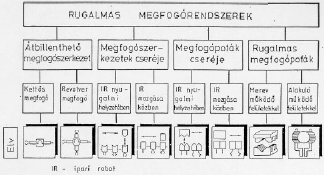
21 Rugalmas (flexibilis) megfogószerkezetek A rugalmasság értelmezése: A megfogási tartomány nagysága (pl.: m t ) A megfogási felületek alkalmazkodóképessége, adaptivitása A szorítóerő adaptivitás A megfogószerkezet-, illetve a megfogópofák cserélhetősége alapján
22 Rugalmas (flexibilis) megfogószerkezetek m t Megfogási tartomány tényező d a : MFSZ átfogási tartománya d m : Tárgy megfogási bázisának tartománya Flexibilis MFSZ nél m t =1
23 Rugalmas (flexibilis) megfogószerkezetek Kettős megfogó szerkezet

24 Rugalmas (flexibilis) megfogószerkezetek Mágneses megfogó szerkezet

25 Rugalmas (flexibilis) megfogószerkezetek Mágneses megfogó szerkezet
26 Rugalmas (flexibilis) megfogószerkezetek Rugalmas mágneses megfogó szerkezet

27 Rugalmas (flexibilis) megfogószerkezetek Pneumatikus megfogó szerkezet
28 Rugalmas (flexibilis) megfogószerkezetek Pneumatikus megfogó szerkezetek (belső, illetve külső)
")
29 Pneumatikus rugalmas ujjas megfogó szerkezet Ipari robotok megfogó szerkezetei Rugalmas (flexibilis) megfogószerkezetek
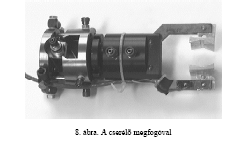
30 Megfogószerkezetek (-pofák) cserélhetősége: Vonatkozhat: (teljes) megfogószerkezetre, megfogóujjakra (-pofákra), szerszámokra

31 A megfogó- és szerszámcserélők főbb feladatai
32

33 Flexibilis megfogó szerkezetek, elemek
34

35 Rugalmas működő felületek kialakításának lehetőségei

36 Magyar kutatók elkészítették az emberi robotkezet, amely az emberi bőr tapintóműködését szimuláló, az idegrendszeri elvek szerint érzékelő mesterséges tapintó- és megfogókészülék. Szabadalmaztatott eljárás alapján Páli Jenő, a biológiai tudományok doktora és munkatársai elkészítették az emberi bőr tapintóműködését szimuláló, az idegrendszeri elvek szerint érzékelő mesterséges tapintó- és megfogókészüléket. Az eszközt nyomtatott áramkörökből és érzékelőkből felépülő tetraéder alakú, sorokba és oszlopokba rendezett tapintóegységek alkotják, melyek csúcsait műanyag buborékok fedik be. A tapintófelületet érő nyomóerőt, annak irányát, időtartamát, valamint mintázatát egy szoftver dolgozza fel. A megfogókészülék egy egyszerűsített háromujjú robotkéz, amelynek szerkezetét az Országos Baleseti- és Sürgősségi Intézetben 300 férfi és 300 nő ép kezéről készült röntgenkép és a kezek biomechanikai paramétereinek feldolgozása alapján tervezték meg.
37 Szorítóerő meghatározása (a munkadarabok biztonságos megfogásához szükséges szorítóerő) A munkadarab megfogó rendszert egy rendszerként kell vizsgálni. Az erőátvitel függ: A megfogó szerkezet, illetve a megfogó szerkezet munkadarab térbeli helyzetétől A munkadarabra ható erők eredőjétől A munkadarab geometriájától A megfogópofák konstrukciós kialakításától (pl. alakkal, erővel záró megfogás arányától) A megfogópofa és a munkadarab anyagától felületétől A környezeti hatásoktól (pl. olaj, por, forgács, hő, rezgések )
38 A biztonságos megfogáshoz szükséges szorítóerő: F= K 1 *K 2 *K 3 *m*g Ahol: K 1 : biztonsági tényező K 1 = 1,2.2,0 (minden olyan körülmény ami nem számszerűsíthető pl. környezeti hatás, por, olaj, stb. ) K 2 : a rendszer gyorsulásától függő tényező: K 2 =1+(a max /g)
39 K 3 : a megfogó szerkezet munkadarab rendszer átviteli tényezője: m*g F = K 3 *m*g K 3
40 A munkadarab tömege számítható a geometriai adatok ismeretében. Ha a tárgy tömör hengeres test, a tárgy tömege: Az összefüggésben: d a tárgy átmérője (m) l a tárgy hossza (m) a tárgy anyagának sűrűsége (kg/m 3 ) m 2 d V 4 l A megfelelő egyenletek behelyettesítésével a szorítóerőt meghatározó egyenlet az alábbi alakra hozható: F K K (g a )d l max 2
41 Köszönöm a figyelmet!
Ipari robotok megfogó szerkezetei
 ROBOTTECHNIKA Ipari robotok megfogó szerkezetei 7. előad adás Dr. Pintér József Tananyag vázlatav 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó szerkezetek kialakítása
ROBOTTECHNIKA Ipari robotok megfogó szerkezetei 7. előad adás Dr. Pintér József Tananyag vázlatav 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó szerkezetek kialakítása
ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat)
") ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat) Erővel záró nyomatékkötések Hatáselve: a kapcsolódó felületre merőleges rugalmas szorítás hatására a felület érintőjének irányába ható terheléssel ellentétes irányban ébredő
ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat) Erővel záró nyomatékkötések Hatáselve: a kapcsolódó felületre merőleges rugalmas szorítás hatására a felület érintőjének irányába ható terheléssel ellentétes irányban ébredő
6. Robotok és manipulátorok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
Ejtési teszt modellezése a tervezés fázisában
 Antal Dániel, doktorandusz, Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szabó Tamás, egyetemi docens, Ph.D., Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szilágyi Attila, egyetemi adjunktus,
Antal Dániel, doktorandusz, Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szabó Tamás, egyetemi docens, Ph.D., Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szilágyi Attila, egyetemi adjunktus,
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
Nagy kiterjedésű termékek hegesztése. Egy kis folytatás az előző alkalomhoz
 Nagy kiterjedésű termékek hegesztése Egy kis folytatás az előző alkalomhoz Nagy kiterjedésű termékek hegesztése JIGles welding példa Példa vízsugaras vágásra Kiszolgáló robotrendszerek Kiszolgáló robotrendszerek
Nagy kiterjedésű termékek hegesztése Egy kis folytatás az előző alkalomhoz Nagy kiterjedésű termékek hegesztése JIGles welding példa Példa vízsugaras vágásra Kiszolgáló robotrendszerek Kiszolgáló robotrendszerek
ROBOTTECHNIKA ALKALMAZÁSOK, ROBOT FOGALMA. Dr. Pintér József
 ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
GÉPIPARI AUTOMATIZÁLÁS
 GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
2. a) Ismertesse a szegecskötés kialakítását, a szegecsek fajtáit, igénybevételét(a szegecselés szerszámai, folyamata, méretmegválasztás)!
 Ismertesse a szegecskötés kialakítását, a szegecsek fajtáit, igénybevételét(a szegecselés szerszámai, folyamata, méretmegválasztás)!") 2 1. a) Ismertesse a csavarkötéseket és a csavarbiztosításokat (kötő- és mozgatócsavarok, csavaranyák, méretek, kiválasztás táblázatból, különféle csavarbiztosítások, jelölések)! b) Határozza meg a forgácsolás
2 1. a) Ismertesse a csavarkötéseket és a csavarbiztosításokat (kötő- és mozgatócsavarok, csavaranyák, méretek, kiválasztás táblázatból, különféle csavarbiztosítások, jelölések)! b) Határozza meg a forgácsolás
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás
 Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Gyártórendszerek fejlődésének fázisai
 Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
ROBOTTECHNIKA. Ipari robotok szerkezeti egységei, terhelhetősége. Dr. Pintér József
 ROBOTTECHNIKA Ipari robotok szerkezeti egységei, terhelhetősége Dr. Pintér József Tartalom Ipari robotok osztályozása Ipari robotok szerkezeti egységei Ipari robotok terhelhetősége Vezetékek, csapágyak
ROBOTTECHNIKA Ipari robotok szerkezeti egységei, terhelhetősége Dr. Pintér József Tartalom Ipari robotok osztályozása Ipari robotok szerkezeti egységei Ipari robotok terhelhetősége Vezetékek, csapágyak
7. Élettartam növelő megmunkálások (tartósság növelő)
") 7. Élettartam növelő megmunkálások (tartósság növelő) Gépek működésekor igénybevétel elületi elületi réteg belső keresztmetszet Felületi mikrogeometria (érdesség) hatással van a: kopásállóságra áradási
7. Élettartam növelő megmunkálások (tartósság növelő) Gépek működésekor igénybevétel elületi elületi réteg belső keresztmetszet Felületi mikrogeometria (érdesség) hatással van a: kopásállóságra áradási
Mérnöki alapok 2. előadás
 Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
2. E L Ő A D Á S D R. H U S I G É Z A
 Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
A forgácsolás alapjai
 NGB_AJ012_1 Forgácsoló megmunkálás (Forgácsolás és szerszámai) A forgácsolás alapjai Dr. Pintér József 2017. FONTOS! KÉREM, NE FELEDJÉK, HOGY A PowerPoint ELŐADÁS VÁZLAT NEM HELYETTESÍTI, CSAK ÖSSZEFOGLALJA,
NGB_AJ012_1 Forgácsoló megmunkálás (Forgácsolás és szerszámai) A forgácsolás alapjai Dr. Pintér József 2017. FONTOS! KÉREM, NE FELEDJÉK, HOGY A PowerPoint ELŐADÁS VÁZLAT NEM HELYETTESÍTI, CSAK ÖSSZEFOGLALJA,
Geofizika alapjai. Bevezetés. Összeállította: dr. Pethő Gábor, dr Vass Péter ME, Geofizikai Tanszék
 Geofizika alapjai Bevezetés Összeállította: dr. Pethő Gábor, dr Vass Péter ME, Geofizikai Tanszék Geofizika helye a tudományok rendszerében Tudományterületek: absztrakt tudományok, természettudományok,
Geofizika alapjai Bevezetés Összeállította: dr. Pethő Gábor, dr Vass Péter ME, Geofizikai Tanszék Geofizika helye a tudományok rendszerében Tudományterületek: absztrakt tudományok, természettudományok,
PÉLDÁK ERŐTÖRVÉNYEKRE
 PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
Foglalkozási napló a 20 /20. tanévre
 i napló a 20 /20. tanévre Gépi forgácsoló szakma gyakorlati oktatásához OKJ száma: 4 521 0 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók adatai és értékelése
i napló a 20 /20. tanévre Gépi forgácsoló szakma gyakorlati oktatásához OKJ száma: 4 521 0 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók adatai és értékelése
MEGMUKÁLÁSI TECHNOLÓGIÁK NGB_AJ003_2 FORGÁCSOLÁSI ELJÁRÁSOK
 MEGMUKÁLÁSI TECHNOLÓGIÁK NGB_AJ003_2 Gépészmérnöki (BSc) szak 7. előadás Összeállította: Vázlat 1. A forgácsolási eljárások 2. Esztergálás 3. Fúrás, süllyesztés, dörzsölés 4. Marás 5. Gyalulás, vésés 6.
MEGMUKÁLÁSI TECHNOLÓGIÁK NGB_AJ003_2 Gépészmérnöki (BSc) szak 7. előadás Összeállította: Vázlat 1. A forgácsolási eljárások 2. Esztergálás 3. Fúrás, süllyesztés, dörzsölés 4. Marás 5. Gyalulás, vésés 6.
HELYI TANTERV. Karbantartási gyakorlat
 HELYI TANTERV Karbantartási gyakorlat Bevezető A szakmai gyakorlati képzés célja az, hogy a tanulókat az adott szakmában felkészítse az önálló, megfelelő minőségű munkavégzésre. A szakmai gyakorlat tanítása
HELYI TANTERV Karbantartási gyakorlat Bevezető A szakmai gyakorlati képzés célja az, hogy a tanulókat az adott szakmában felkészítse az önálló, megfelelő minőségű munkavégzésre. A szakmai gyakorlat tanítása
A WIHA slágertermékei
 Jelen ajánlat 2015.03.01-2016.02.29.-ig érvényes. Jelen ajánlat 2015.07.22-töl 2016.02.29-ig érvényes A WIHA slágertermékei Ismerje meg a Wiha új termékeit! Találja meg kedvenc termékét nagyon jó áron!
Jelen ajánlat 2015.03.01-2016.02.29.-ig érvényes. Jelen ajánlat 2015.07.22-töl 2016.02.29-ig érvényes A WIHA slágertermékei Ismerje meg a Wiha új termékeit! Találja meg kedvenc termékét nagyon jó áron!
ROG4K. EM210 fogyasztásmérő áramérzékelő ( A) Előnyök. Leírás
 Előnyök. Leírás") ROG4K EM210 fogyasztásmérő áramérzékelő (20-4000 A) Leírás Az áramérzékelő működése Rogowski elven alapul, EM210 fogyasztásmérővel együtt kell használni ( EM210 72D MV5 és EM210 72D MV6 verzió) egy-két
ROG4K EM210 fogyasztásmérő áramérzékelő (20-4000 A) Leírás Az áramérzékelő működése Rogowski elven alapul, EM210 fogyasztásmérővel együtt kell használni ( EM210 72D MV5 és EM210 72D MV6 verzió) egy-két
6. Robotok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
Szerkezeti elemek megfogása
 Szerkezeti elemek megfogása A gyártás, rakodás és szerelés közben szükségessé válik az elemek mozgatása. A nagyobb szerkezeti elemek esetében csak gépi mozgatás valósítható meg. Ekkor azonban szükség van
Szerkezeti elemek megfogása A gyártás, rakodás és szerelés közben szükségessé válik az elemek mozgatása. A nagyobb szerkezeti elemek esetében csak gépi mozgatás valósítható meg. Ekkor azonban szükség van
JÁRMŰVEK JAVÍTÁSA. Javítási technológiák
 JÁRMŰVEK JAVÍTÁSA Javítási technológiák Javítás A javítás feladata az üzemképesség, az előírt megbízhatósági szint helyreállítása. javításkor részleges vagy teljes szétszerelés és alapos tisztítása után
JÁRMŰVEK JAVÍTÁSA Javítási technológiák Javítás A javítás feladata az üzemképesség, az előírt megbízhatósági szint helyreállítása. javításkor részleges vagy teljes szétszerelés és alapos tisztítása után
VÁKUUMOS FELFOGATÓ RENDSZEREK
 OS FELFOGATÓ RENDSZEREK A vákuumos munkadarab rögzítõ rendszerek ideális megoldást jelentenek olyan megmunkáló cégeknek, melyek nem mágnesezhetõ anyagokat munkálnak meg, úgy mint alumíniumot, sárgarezet,
OS FELFOGATÓ RENDSZEREK A vákuumos munkadarab rögzítõ rendszerek ideális megoldást jelentenek olyan megmunkáló cégeknek, melyek nem mágnesezhetõ anyagokat munkálnak meg, úgy mint alumíniumot, sárgarezet,
Géprajz - gépelemek. Előadó: Németh Szabolcs mérnöktanár. Belső használatú jegyzet 2
 Géprajz - gépelemek FELÜLETI ÉRDESSÉG Előadó: Németh Szabolcs mérnöktanár Belső használatú jegyzet http://gepesz-learning.shp.hu 1 Felületi érdesség Az alkatrészek elkészítéséhez a rajznak tartalmaznia
Géprajz - gépelemek FELÜLETI ÉRDESSÉG Előadó: Németh Szabolcs mérnöktanár Belső használatú jegyzet http://gepesz-learning.shp.hu 1 Felületi érdesség Az alkatrészek elkészítéséhez a rajznak tartalmaznia
HU Akció. Érvényes: Az ön szakkereskedője: A precizitás hatalma
 HU kció Érvényes: 217.07.01-2017.12.31 z ön szakkereskedője: www.uniortools.com tó ópai gyár Eur 1919 óta precizitás hatalma 110/1 Villáskulcs-készlet 160/2 Racsnis csillag-villáskulcs anyaga: króm-vanádium
HU kció Érvényes: 217.07.01-2017.12.31 z ön szakkereskedője: www.uniortools.com tó ópai gyár Eur 1919 óta precizitás hatalma 110/1 Villáskulcs-készlet 160/2 Racsnis csillag-villáskulcs anyaga: króm-vanádium
Pneumatika az ipari alkalmazásokban
 Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Hidrosztatika. Folyadékok fizikai tulajdonságai
 Hidrosztatika A Hidrosztatika a nyugalomban lévő folyadékoknak a szilárd testekre, felületekre gyakorolt hatásával foglalkozik. Tárgyalja a nyugalomban lévő folyadékok nyomásviszonyait, vizsgálja a folyadékba
Hidrosztatika A Hidrosztatika a nyugalomban lévő folyadékoknak a szilárd testekre, felületekre gyakorolt hatásával foglalkozik. Tárgyalja a nyugalomban lévő folyadékok nyomásviszonyait, vizsgálja a folyadékba
Gyártástechnológia II.
 Gyártástechnológia II. BAGGT23NNB Bevezetés, Alapfogalmak Dr. Mikó Balázs miko.balazs@bgk.bmf.hu Tartalom Alapfogalmak Technológiai dokumentumok Elıgyártmányok Gyártási hibák, ráhagyások Bázisok és készülékek
Gyártástechnológia II. BAGGT23NNB Bevezetés, Alapfogalmak Dr. Mikó Balázs miko.balazs@bgk.bmf.hu Tartalom Alapfogalmak Technológiai dokumentumok Elıgyártmányok Gyártási hibák, ráhagyások Bázisok és készülékek
Sorrendtervezés. Dr. Mikó Balázs Az elemzés egysége a felületelem csoport.
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Termelési folyamatok II. Sorrendtervezés Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu A
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Termelési folyamatok II. Sorrendtervezés Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu A
Alámetszés. Mőanyag fröccsöntı szerszámok tervezése és gyártása. Alámetszett alkatrészek gyártása
 Dr. Mikó Balázs miko.balazs@bgk.bmf.hu Mőanyag fröccsöntı szerszámok tervezése és gyártása Alámetszett alkatrészek gyártása Alámetszés 2 A nyitás / kilökés irányából takart felületek Méret / Jelleg / Zárás
Dr. Mikó Balázs miko.balazs@bgk.bmf.hu Mőanyag fröccsöntı szerszámok tervezése és gyártása Alámetszett alkatrészek gyártása Alámetszés 2 A nyitás / kilökés irányából takart felületek Méret / Jelleg / Zárás
Intelligens Technológiák gyakorlati alkalmazása
 Intelligens Technológiák gyakorlati alkalmazása 13-14. Október 2016 Budaörs, Gyár u. 2. SMARTUS Zrt. Machining Navi Kutnyánszky Tamás Területi értékesítési vezető Mi az a Machinin Navi? Olyan rezgés felügyeleti
Intelligens Technológiák gyakorlati alkalmazása 13-14. Október 2016 Budaörs, Gyár u. 2. SMARTUS Zrt. Machining Navi Kutnyánszky Tamás Területi értékesítési vezető Mi az a Machinin Navi? Olyan rezgés felügyeleti
FORGÁCSOLÁSI ELJÁRÁSOK
 GYÁRTÁSTECHNOLÓGIA NGB_AJ008_1 Műszaki menedzser (BSc) szak, Mechatronikai mérnöki (BSc) szak Előadás Összeállította: Vázlat 1. A forgácsolási eljárások 2. Esztergálás 3. Fúrás, süllyesztés, dörzsölés
GYÁRTÁSTECHNOLÓGIA NGB_AJ008_1 Műszaki menedzser (BSc) szak, Mechatronikai mérnöki (BSc) szak Előadás Összeállította: Vázlat 1. A forgácsolási eljárások 2. Esztergálás 3. Fúrás, süllyesztés, dörzsölés
Ipari robotok osztályozása, szerkezeti egységei
 ROBOTTECHNIKA Ipari robotok osztályozása, szerkezeti egységei 3. előadás Dr. Pintér József A robotok osztályozhatók: Robotok osztályozása, felépítésük Mozgásuk Munkaterületük Felépítésük Vezérlésük Feladatuk
ROBOTTECHNIKA Ipari robotok osztályozása, szerkezeti egységei 3. előadás Dr. Pintér József A robotok osztályozhatók: Robotok osztályozása, felépítésük Mozgásuk Munkaterületük Felépítésük Vezérlésük Feladatuk
Foglalkozási napló a 20 /20. tanévre
 i napló a 20 /20. tanévre Autógyártó szakma gyakorlati oktatásához OKJ száma: 34 521 01 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók adatai és értékelése
i napló a 20 /20. tanévre Autógyártó szakma gyakorlati oktatásához OKJ száma: 34 521 01 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók adatai és értékelése
TERMÉKSZIMULÁCIÓ. Dr. Kovács Zsolt. Végeselem módszer. Elıadó: egyetemi tanár. Termékszimuláció tantárgy 6. elıadás március 22.
 TERMÉKZIMULÁCIÓ Végeselem módszer Termékszimuláció tantárgy 6. elıadás 211. március 22. Elıadó: Dr. Kovács Zsolt egyetemi tanár A végeselem módszer lényege A vizsgált, tetszıleges geometriai kialakítású
TERMÉKZIMULÁCIÓ Végeselem módszer Termékszimuláció tantárgy 6. elıadás 211. március 22. Elıadó: Dr. Kovács Zsolt egyetemi tanár A végeselem módszer lényege A vizsgált, tetszıleges geometriai kialakítású
A forgácsolás alapjai
 A forgácsolás alapjai Dr. Igaz Jenő: Forgácsoló megmunkálás II/1 1-43. oldal és 73-98. oldal FONTOS! KÉREM, NE FELEDJÉK, HOGY A PowerPoint ELŐADÁS VÁZLAT NEM HELYETTESÍTI, CSAK ÖSSZEFOGLALJA, HELYENKÉNT
A forgácsolás alapjai Dr. Igaz Jenő: Forgácsoló megmunkálás II/1 1-43. oldal és 73-98. oldal FONTOS! KÉREM, NE FELEDJÉK, HOGY A PowerPoint ELŐADÁS VÁZLAT NEM HELYETTESÍTI, CSAK ÖSSZEFOGLALJA, HELYENKÉNT
ábra Vezetőoszlopos blokkszerszám kilökővel
 21 2.2.3. ábra Vezetőoszlopos blokkszerszám kilökővel Gyűjtse ki a kivágási folyamat hátrányos következményeit! Tanulja meg a pontosabb méretű munkadarab gyártásának megoldásait! 2.2.3. Pontossági vágás,
21 2.2.3. ábra Vezetőoszlopos blokkszerszám kilökővel Gyűjtse ki a kivágási folyamat hátrányos következményeit! Tanulja meg a pontosabb méretű munkadarab gyártásának megoldásait! 2.2.3. Pontossági vágás,
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Finommechanikai műszerész szakma gyakorlati oktatásához OKJ száma: 34 521 02 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Foglalkozási napló a 20 /20. tanévre Finommechanikai műszerész szakma gyakorlati oktatásához OKJ száma: 34 521 02 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
A GRANTOOL BEMUTATJA ÚJ, PRECÍZIÓS SATUCSALÁDJAIT PRECÍZIÓS SATUK
 PRECÍZIÓS SATUK STANDARD (széria) satuk STANDARDFLEX flexibilis moduláris rendszer XL moduláris rendszerû satuk OK MULTITASKING MULTIFLEX több darab egyidejû megfogása MEGFOGÁSTECHNIKAI RENDSZERÉPÍTÔ ELEMEK
PRECÍZIÓS SATUK STANDARD (széria) satuk STANDARDFLEX flexibilis moduláris rendszer XL moduláris rendszerû satuk OK MULTITASKING MULTIFLEX több darab egyidejû megfogása MEGFOGÁSTECHNIKAI RENDSZERÉPÍTÔ ELEMEK
Forgácsoló gyártócellák, gyártórendszerek 1.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
52 523 03 0000 00 00 Mechatronikai műszerész Mechatronikai műszerész
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A gyártási rendszerek áttekintése
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
IPARI ROBOTOK MEGFOGÓ SZERKEZETEI
 12. GYAKORLAT IPARI ROBOTOK MEGFOGÓ SZERKEZETEI Összeállította: Dr. Merksz István A gyakorlat célja: A megfogó szerkezetek jelentõségének és szerepének feltárása, elsõsorban a forgácsolási és szerelési
12. GYAKORLAT IPARI ROBOTOK MEGFOGÓ SZERKEZETEI Összeállította: Dr. Merksz István A gyakorlat célja: A megfogó szerkezetek jelentõségének és szerepének feltárása, elsõsorban a forgácsolási és szerelési
Szakmai gyakorlat. Országos Középiskolai Pneumatika Verseny 2016. Azonosító jel: Ügyeljen a munkavédelmi szabályok betartására!
 Csernyánszky Imre Országos Középiskolai Pneumatika Verseny 2016. Szakmai gyakorlat A feladatok megoldására 120 perc áll rendelkezésre. Sorsz. Feladat Max. pont Elért pont 1. Pneumatika feladat 1: Tesztelő
Csernyánszky Imre Országos Középiskolai Pneumatika Verseny 2016. Szakmai gyakorlat A feladatok megoldására 120 perc áll rendelkezésre. Sorsz. Feladat Max. pont Elért pont 1. Pneumatika feladat 1: Tesztelő
Miskolci Egyetem, Gyártástudományi Intézet, Prof. Dr. Dudás Illés
 3. SÍK FELÜLETEK MEGMUNKÁLÁSA Sík felületek (SF) legtöbbször körrel vagy egyenes alakzatokkal határolt felületként fordulnak elő. A SF-ek legáltalánosabb megmunkálási lehetőségeit a 3.. ábra szemlélteti.
3. SÍK FELÜLETEK MEGMUNKÁLÁSA Sík felületek (SF) legtöbbször körrel vagy egyenes alakzatokkal határolt felületként fordulnak elő. A SF-ek legáltalánosabb megmunkálási lehetőségeit a 3.. ábra szemlélteti.
A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás. 2012/13 2. félév Dr.
 A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás 2012/13 2. félév Dr. Kulcsár Gyula Forgácsolás, fúrás, furatmegmunkálás Forgácsolás Forgácsoláskor
A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás 2012/13 2. félév Dr. Kulcsár Gyula Forgácsolás, fúrás, furatmegmunkálás Forgácsolás Forgácsoláskor
A végeselem módszer alapjai. 2. Alapvető elemtípusok
 A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
W = F s A munka származtatott, előjeles skalármennyiség.
 Ha az erő és az elmozdulás egymásra merőleges, akkor fizikai értelemben nem történik munkavégzés. Pl.: ha egy táskát függőlegesen tartunk, és úgy sétálunk, akkor sem a tartóerő, sem a nehézségi erő nem
Ha az erő és az elmozdulás egymásra merőleges, akkor fizikai értelemben nem történik munkavégzés. Pl.: ha egy táskát függőlegesen tartunk, és úgy sétálunk, akkor sem a tartóerő, sem a nehézségi erő nem
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
A tételekhez segédeszköz nem használható.
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a 4. Szakmai követelmények fejezetben szereplő szakmai követelménymodulok témaköreit tartalmazza A tételekhez
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a 4. Szakmai követelmények fejezetben szereplő szakmai követelménymodulok témaköreit tartalmazza A tételekhez
Mérések állítható hajlásszögű lejtőn
 A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
SZABADALMI LEÍRÁS. (21) A bejelentés ügyszáma: P 02 00474 (22) A bejelentés napja: 2002. 02. 08. (30) Elsõbbségi adatok: P0100663 2001. 02. 09.
 A bejelentés ügyszáma: P 02 00474 (22) A bejelentés napja: 2002. 02. 08. (30) Elsõbbségi adatok: P0100663 2001. 02. 09.") (19) Országkód HU SZABADALMI LEÍRÁS!HU000223360B1_! (11) Lajstromszám: 223 360 B1 (21) A bejelentés ügyszáma: P 02 00474 (22) A bejelentés napja: 2002. 02. 08. (30) Elsõbbségi adatok: P0100663 2001. 02.
(19) Országkód HU SZABADALMI LEÍRÁS!HU000223360B1_! (11) Lajstromszám: 223 360 B1 (21) A bejelentés ügyszáma: P 02 00474 (22) A bejelentés napja: 2002. 02. 08. (30) Elsõbbségi adatok: P0100663 2001. 02.
Szívókarok és ventilátorok
 Tartalomjegyzék és ventilátorok Szívókar 61 Szívókar, 2 csukló 62 Szívókar, 3 csukló 63 Teleszkópkar 65 Szívókar elszívócsatornához 66 Szívókar, álló függő 67 Ventilátorok Ventilátor 68 Központi ventilátor
Tartalomjegyzék és ventilátorok Szívókar 61 Szívókar, 2 csukló 62 Szívókar, 3 csukló 63 Teleszkópkar 65 Szívókar elszívócsatornához 66 Szívókar, álló függő 67 Ventilátorok Ventilátor 68 Központi ventilátor
Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével
 Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 213. október 8. Javítva: 213.1.13. Határozzuk
Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 213. október 8. Javítva: 213.1.13. Határozzuk
Foglalkozási napló. Finommechanikai műszerész
 Foglalkozási ló a 20 /20. tanévre Finommechanikai műszerész (OKJ száma: 34 521 02) szakma gyakorlati oktatásához 10. évfolyam A ló vezetéséért felelős: A ló megnyitásának dátuma: A ló lezárásának dátuma:
Foglalkozási ló a 20 /20. tanévre Finommechanikai műszerész (OKJ száma: 34 521 02) szakma gyakorlati oktatásához 10. évfolyam A ló vezetéséért felelős: A ló megnyitásának dátuma: A ló lezárásának dátuma:
POR-- ÉS PÁLYAVÉDELEM
 2008as kiadás HENNLICH IPARTECHNIKA KFT. GÉPELEM ÉS TÖMÍTÉSTECHNIKA ÜZLETÁG H6000 KecskemétKadafalva Heliport Reptér Tel.: 0676/470309 Fax: 0676/470308 Email: gepelem@hennlich.hu www.hennlich.hu POR ÉS
2008as kiadás HENNLICH IPARTECHNIKA KFT. GÉPELEM ÉS TÖMÍTÉSTECHNIKA ÜZLETÁG H6000 KecskemétKadafalva Heliport Reptér Tel.: 0676/470309 Fax: 0676/470308 Email: gepelem@hennlich.hu www.hennlich.hu POR ÉS
Járműelemek. Rugók. 1 / 27 Fólia
 Rugók 1 / 27 Fólia 1. Rugók funkciója A rugók a gépeknek és szerkezeteknek olyan különleges elemei, amelyek nagy (ill. korlátozott) alakváltozás létrehozására alkalmasak. Az alakváltozás, szemben más szerkezeti
Rugók 1 / 27 Fólia 1. Rugók funkciója A rugók a gépeknek és szerkezeteknek olyan különleges elemei, amelyek nagy (ill. korlátozott) alakváltozás létrehozására alkalmasak. Az alakváltozás, szemben más szerkezeti
Egy háromlábú állvány feladata. 1. ábra forrása:
 1 Egy háromlábú állvány feladata Az interneten találtuk az alábbi versenyfeladatot 1. ábra Az egyforma hosszúságú CA, CB és CD rudak a C pontban gömbcsuklóval kapcsolódnak, az A, B, D végükön sima vízszintes
1 Egy háromlábú állvány feladata Az interneten találtuk az alábbi versenyfeladatot 1. ábra Az egyforma hosszúságú CA, CB és CD rudak a C pontban gömbcsuklóval kapcsolódnak, az A, B, D végükön sima vízszintes
CNC gépek szerszámellátása
 CNC gépek szerszámellátása Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek I.-II., BMF Czéh Mihály Hervay Péter
CNC gépek szerszámellátása Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek I.-II., BMF Czéh Mihály Hervay Péter
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Gépgyártástechnológiai technikus szakma gyakorlati oktatásához OKJ száma: 54 521 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Foglalkozási napló a 20 /20. tanévre Gépgyártástechnológiai technikus szakma gyakorlati oktatásához OKJ száma: 54 521 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
9. FORGÁCSOLÁS HATÁROZATLAN ÉLGEOMET- RIÁJÚ SZERSZÁMMAL
 9. FORGÁCSOLÁS HATÁROZATLAN ÉLGEOMET- RIÁJÚ SZERSZÁMMAL A geometriailag határozatlan élgeometriájú szerszámmal való forgácsolás, a szerszám mechanikus behatása révén kialakuló anyagleválasztás. Az élt
9. FORGÁCSOLÁS HATÁROZATLAN ÉLGEOMET- RIÁJÚ SZERSZÁMMAL A geometriailag határozatlan élgeometriájú szerszámmal való forgácsolás, a szerszám mechanikus behatása révén kialakuló anyagleválasztás. Az élt
Infobionika ROBOTIKA. IX. Előadás. Robot manipulátorok I. Alapfogalmak. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
A DINAMIKUS TÁVVEZETÉK-TERHELHETŐSÉG (DLR) ALKALMAZHATÓSÁGÁNAK FELTÉTELEI
 ALKALMAZHATÓSÁGÁNAK FELTÉTELEI") 5/10/2016 1 A DINAMIKUS TÁVVEZETÉK-TERHELHETŐSÉG (DLR) ALKALMAZHATÓSÁGÁNAK FELTÉTELEI A FENNTARTHATÓ ENERGETIKA VILLAMOS RENDSZEREI 2016. tavasz Balangó Dávid Nagyfeszültségű Technika és Berendezések Csoport
5/10/2016 1 A DINAMIKUS TÁVVEZETÉK-TERHELHETŐSÉG (DLR) ALKALMAZHATÓSÁGÁNAK FELTÉTELEI A FENNTARTHATÓ ENERGETIKA VILLAMOS RENDSZEREI 2016. tavasz Balangó Dávid Nagyfeszültségű Technika és Berendezések Csoport
Szerszámgépek, méretellenőrzés CNC szerszámgépen
 Mérés CNC szerszámgépen Szerszámgépek, méretellenőrzés CNC szerszámgépen Dr. Markos Sándor BME GTT, SZMSZ Geometriai mérés CNC szerszámgépen? Nagy méretű munkadarabok. Szerszámbefogási hibák Szerszámgépmérés
Mérés CNC szerszámgépen Szerszámgépek, méretellenőrzés CNC szerszámgépen Dr. Markos Sándor BME GTT, SZMSZ Geometriai mérés CNC szerszámgépen? Nagy méretű munkadarabok. Szerszámbefogási hibák Szerszámgépmérés
Előszó.. Bevezetés. 1. A fizikai megismerés alapjai Tér is idő. Hosszúság- és időmérés.
 SZABÓ JÁNOS: Fizika (Mechanika, hőtan) I. TARTALOMJEGYZÉK Előszó.. Bevezetés. 1. A fizikai megismerés alapjai... 2. Tér is idő. Hosszúság- és időmérés. MECHANIKA I. Az anyagi pont mechanikája 1. Az anyagi
SZABÓ JÁNOS: Fizika (Mechanika, hőtan) I. TARTALOMJEGYZÉK Előszó.. Bevezetés. 1. A fizikai megismerés alapjai... 2. Tér is idő. Hosszúság- és időmérés. MECHANIKA I. Az anyagi pont mechanikája 1. Az anyagi
RÖVID ÚTMUTATÓ A FELÜLETI ÉRDESSÉG MÉRÉSÉHEZ
 RÖVID ÚTMUTATÓ A FELÜLETI ÉRDESSÉG MÉRÉSÉHEZ Referencia útmutató laboratórium és műhely részére Magyar KIADÁS lr i = kiértékelési hossz Profilok és szűrők (EN ISO 4287 és EN ISO 16610-21) 01 A tényleges
RÖVID ÚTMUTATÓ A FELÜLETI ÉRDESSÉG MÉRÉSÉHEZ Referencia útmutató laboratórium és műhely részére Magyar KIADÁS lr i = kiértékelési hossz Profilok és szűrők (EN ISO 4287 és EN ISO 16610-21) 01 A tényleges
Házi feladat. 05 Külső hengeres felületek megmunkálása Dr. Mikó Balázs
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Gyártástechnológia II. BAGGT23NND/NLD 05 Külső hengeres felületek megmunkálása Dr. Mikó
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Gyártástechnológia II. BAGGT23NND/NLD 05 Külső hengeres felületek megmunkálása Dr. Mikó
Szerszámtervezés és validálás Moldex3D és Cavity Eye rendszer támogatással. Pósa Márk 2015. Október 08.
 Szerszámtervezés és validálás Moldex3D és Cavity Eye rendszer támogatással. Pósa Márk 2015. Október 08. Cégbemutató 2004: Reológiai alapkutatás kezdete a Kecskeméti Főiskolán 2011: Doktori munka befejezése,
Szerszámtervezés és validálás Moldex3D és Cavity Eye rendszer támogatással. Pósa Márk 2015. Október 08. Cégbemutató 2004: Reológiai alapkutatás kezdete a Kecskeméti Főiskolán 2011: Doktori munka befejezése,
A visszacsapó kilincs működéséről
 1 A visszacsapó kilincs működéséről A faipari forgácsoló gépek egy részén a munkadarab visszasodródása ellen visszacsapó kilincset / kilincssort alkalmaznak. Ilyen gépek például a felülről vágó körfűrészek
1 A visszacsapó kilincs működéséről A faipari forgácsoló gépek egy részén a munkadarab visszasodródása ellen visszacsapó kilincset / kilincssort alkalmaznak. Ilyen gépek például a felülről vágó körfűrészek
ESZTERGÁLÁS Walter ISO esztergálás 8 Beszúrás 19 Befogók 25 Rendelési oldalak 26 Műszaki melléklet 96
 ESTEGÁLÁS Walter ISO esztergálás 8 Beszúrás 19 Befogók 25 endelési oldalak 26 Műszaki melléklet 96 FÚÁS Walter Titex Tömör keményfém fúrók 104 endelési oldalak 106 Műszaki melléklet 122 Walter Felfúrás
ESTEGÁLÁS Walter ISO esztergálás 8 Beszúrás 19 Befogók 25 endelési oldalak 26 Műszaki melléklet 96 FÚÁS Walter Titex Tömör keményfém fúrók 104 endelési oldalak 106 Műszaki melléklet 122 Walter Felfúrás
Ipari robotok. szerkezeti egységei
 ROBOTTECHNIKA Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk Energiaforrásuk
ROBOTTECHNIKA Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk Energiaforrásuk
FÜGGÔLEGES MEGMUNKÁLÓ KÖZPONT
 FÜGGÔLEGES MEGMUNKÁLÓ KÖZPONT MUNKAASZTAL: X/Y/Z ELMOZDULÁS: A.T.C.: GÉP ALAPTERÜLET forgácsszállító/kihordó szalaggal: A GÉP SÚLYA: GENOVA 20-AS TÍPUSÚ SZERSZÁMTÁR ATC. Karos típusú automatikus szerszámcserélõ
FÜGGÔLEGES MEGMUNKÁLÓ KÖZPONT MUNKAASZTAL: X/Y/Z ELMOZDULÁS: A.T.C.: GÉP ALAPTERÜLET forgácsszállító/kihordó szalaggal: A GÉP SÚLYA: GENOVA 20-AS TÍPUSÚ SZERSZÁMTÁR ATC. Karos típusú automatikus szerszámcserélõ
TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI. 1. Bevezetés
 TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI Dr. Goda Tibor egyetemi docens Gép- és Terméktervezés Tanszék 1. Bevezetés 1.1. A végeselem módszer alapjai - diszkretizáció, - szerkezet felbontása kicsi szabályos elemekre
TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI Dr. Goda Tibor egyetemi docens Gép- és Terméktervezés Tanszék 1. Bevezetés 1.1. A végeselem módszer alapjai - diszkretizáció, - szerkezet felbontása kicsi szabályos elemekre
Pneumatika. 1. előadás
 1. előadás Tartalom: A pneumatikus rendszer felépítése A sűrített levegő előállítása és kezelése A pneumatikus a rendszer elemei: munkavégző rész (végrehajtók) vezérlő rész (erősítők, irányítók, jeladók).
1. előadás Tartalom: A pneumatikus rendszer felépítése A sűrített levegő előállítása és kezelése A pneumatikus a rendszer elemei: munkavégző rész (végrehajtók) vezérlő rész (erősítők, irányítók, jeladók).
Fa- és Acélszerkezetek I. 1. Előadás Bevezetés. Dr. Szalai József Főiskolai adjunktus
 Fa- és Acélszerkezetek I. 1. Előadás Bevezetés Dr. Szalai József Főiskolai adjunktus Okt. Hét 1. Téma Bevezetés acélszerkezetek méretezésébe, elhelyezés a tananyagban Acélszerkezetek használati területei
Fa- és Acélszerkezetek I. 1. Előadás Bevezetés Dr. Szalai József Főiskolai adjunktus Okt. Hét 1. Téma Bevezetés acélszerkezetek méretezésébe, elhelyezés a tananyagban Acélszerkezetek használati területei
Forgácsoló megmunkálások áttekintése 2.
 Gyártócellák (NGB_AJ018_1) Forgácsoló megmunkálások áttekintése 2. Bevezetés Dr. Pintér József 2 Tartalom A forgácsolási eljárások csoportosítása Esztergálás és változatai Fúrás és változatai Marás és
Gyártócellák (NGB_AJ018_1) Forgácsoló megmunkálások áttekintése 2. Bevezetés Dr. Pintér József 2 Tartalom A forgácsolási eljárások csoportosítása Esztergálás és változatai Fúrás és változatai Marás és
1. Feladatok a dinamika tárgyköréből
 1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
Piri Dávid. Mérőállomás célkövető üzemmódjának pontossági vizsgálata
 Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Herceg Esterházy Miklós Szakképző Iskola, Speciális Szakiskola és Kollégium TANMENET
 Herceg Esterházy Miklós Szakképző Iskola, Speciális Szakiskola és Kollégium TANMENET a 10162-12 Gépészeti alapozó feladatok modul Gépészeti alapozó feladatok elmélete tantárgyból a TÁMOP-2.2.5.A-12/1-2012-0038
Herceg Esterházy Miklós Szakképző Iskola, Speciális Szakiskola és Kollégium TANMENET a 10162-12 Gépészeti alapozó feladatok modul Gépészeti alapozó feladatok elmélete tantárgyból a TÁMOP-2.2.5.A-12/1-2012-0038
Seite 1. Különleges mélyhúzó eljárások. A különleges mélyhúzó eljárások alkalmazásának indokai. Kissorozatú gyártás gazdaságosságának fokozása
 9. előad adás Különleges mélyhúzó eljárások Prof. Dr. Tisza Miklós 1 A különleges mélyhúzó eljárások alkalmazásának indokai Különleges mélyhúzó eljárásokat különböző indokokkal alkalmazunk. Ezek közül
9. előad adás Különleges mélyhúzó eljárások Prof. Dr. Tisza Miklós 1 A különleges mélyhúzó eljárások alkalmazásának indokai Különleges mélyhúzó eljárásokat különböző indokokkal alkalmazunk. Ezek közül
Foglalkozási napló. Autógyártó 11. évfolyam
 Foglalkozási napló a 20 /20. tanévre Autógyártó 11. évfolyam (OKJ száma: 34 521 01) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Foglalkozási napló a 20 /20. tanévre Autógyártó 11. évfolyam (OKJ száma: 34 521 01) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
A NAGY PRECIZITÁS ÉS PONTOSSÁG GARANTÁLT
 A NAGY PRECIZITÁS ÉS PONTOSSÁG GARANTÁLT Mindegyik gépet olyan gyárban gyártjuk, ahol állandó hômérsékletet és páratartalmat tartunk fenn. Maximumot a Maximartól! CNC EXPORT KFT H-8152 Kőszárhegy Fő út
A NAGY PRECIZITÁS ÉS PONTOSSÁG GARANTÁLT Mindegyik gépet olyan gyárban gyártjuk, ahol állandó hômérsékletet és páratartalmat tartunk fenn. Maximumot a Maximartól! CNC EXPORT KFT H-8152 Kőszárhegy Fő út
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Gyors prototípus gyártás (Rapid Prototyping, RPT) 2009.11.09.
 2009.11.09.") Gyors prototípus gyártás (Rapid Prototyping, RPT) 2009.11.09. Konkurens (szimultán) tervezés: Alapötlet Részletterv Vázlat Prototípus Előzetes prototípus Bevizsgálás A prototípus készítés indoka: - formai
Gyors prototípus gyártás (Rapid Prototyping, RPT) 2009.11.09. Konkurens (szimultán) tervezés: Alapötlet Részletterv Vázlat Prototípus Előzetes prototípus Bevizsgálás A prototípus készítés indoka: - formai
Fizika. Fizika. Nyitray Gergely (PhD) PTE PMMIK február 13.
 PTE PMMIK február 13.") Fizika Nyitray Gergely (PhD) PTE PMMIK 017. február 13. A lejtő mint kényszer A lejtő egy ún. egyszerű gép. A következő problémában először a lejtőt rögzítjük, és egy m tömegű test súrlódás nélkül lecsúszik
Fizika Nyitray Gergely (PhD) PTE PMMIK 017. február 13. A lejtő mint kényszer A lejtő egy ún. egyszerű gép. A következő problémában először a lejtőt rögzítjük, és egy m tömegű test súrlódás nélkül lecsúszik
TestLine - 7. Fizika Témazáró Erő, munka, forgatónyomaték Minta feladatsor
 gészítsd ki a mondatot! egyenes vonalú egyensúlyban erő hatások mozgást 1. 2:57 Normál Ha a testet érő... kiegyenlítik egymást, azt mondjuk, hogy a test... van. z egyensúlyban lévő test vagy nyugalomban
gészítsd ki a mondatot! egyenes vonalú egyensúlyban erő hatások mozgást 1. 2:57 Normál Ha a testet érő... kiegyenlítik egymást, azt mondjuk, hogy a test... van. z egyensúlyban lévő test vagy nyugalomban
TestLine - 7. Fizika Témazáró Erő, munka, forgatónyomaték Minta feladatsor
 gészítsd ki a mondatokat Válasz lehetőségek: (1) a föld középpontja felé mutató erőhatást 1. fejt ki., (2) az alátámasztásra vagy a felfüggesztésre hat., (3) két 4:15 Normál különböző erő., (4) nyomja
gészítsd ki a mondatokat Válasz lehetőségek: (1) a föld középpontja felé mutató erőhatást 1. fejt ki., (2) az alátámasztásra vagy a felfüggesztésre hat., (3) két 4:15 Normál különböző erő., (4) nyomja
CSAVAROK. Oldal 246 Gyorsrögzítős csavar rövid. Oldal 246 Gyorsrögzítős csavar hosszú. Oldal 247 Univerzális csavar rövid
 Oldal 246 Gyorsrögzítős csavar rövid Oldal 246 Gyorsrögzítős csavar hosszú Oldal 247 Univerzális csavar rövid Oldal 247 Univerzális csavar hosszú Oldal 248 Univerzális csavar Basic rövid Oldal 248 Univerzális
Oldal 246 Gyorsrögzítős csavar rövid Oldal 246 Gyorsrögzítős csavar hosszú Oldal 247 Univerzális csavar rövid Oldal 247 Univerzális csavar hosszú Oldal 248 Univerzális csavar Basic rövid Oldal 248 Univerzális
Mechanika - Versenyfeladatok
 Mechanika - Versenyfeladatok 1. A mellékelt ábrán látható egy jobbmenetű csavar és egy villáskulcs. A kulcsra ható F erővektor nyomatékot fejt ki a csavar forgatása céljából. Az erő támadópontja és az
Mechanika - Versenyfeladatok 1. A mellékelt ábrán látható egy jobbmenetű csavar és egy villáskulcs. A kulcsra ható F erővektor nyomatékot fejt ki a csavar forgatása céljából. Az erő támadópontja és az
Newton törvények, erők
 Newton törvények, erők Newton I. törvénye: Minden test megtartja nyugalmi állapotát, vagy egyenes vonalú egyenletes mozgását (állandó sebességét), amíg a környezete ezt meg nem változtatja (amíg külső
Newton törvények, erők Newton I. törvénye: Minden test megtartja nyugalmi állapotát, vagy egyenes vonalú egyenletes mozgását (állandó sebességét), amíg a környezete ezt meg nem változtatja (amíg külső
Orbitool Sorjázó szerszám
 Orbitool Sorjázó szerszám HASZNÁLATI ÚTMUTATÓ ÜZEMELTETÉSI LEÍRÁS MANUEL D INSTALLATION ET DE SERVICE ISTRUZONI PER L USO Magyar Tartalomjegyzék Oldal 1. Általános ismertető... 3 2. Biztonsági útmutató...
Orbitool Sorjázó szerszám HASZNÁLATI ÚTMUTATÓ ÜZEMELTETÉSI LEÍRÁS MANUEL D INSTALLATION ET DE SERVICE ISTRUZONI PER L USO Magyar Tartalomjegyzék Oldal 1. Általános ismertető... 3 2. Biztonsági útmutató...
Járműszerkezeti anyagok és megmunkálások II / I. félév. Kopás, éltartam. Dr. Szmejkál Attila Ozsváth Péter
 2007-2008 / I. félév Kopás, éltartam Dr. Szmejkál Attila Ozsváth Péter Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki Kar Járműgyártás és javítás Tanszék H-1111, Budapest Bertalan L.
2007-2008 / I. félév Kopás, éltartam Dr. Szmejkál Attila Ozsváth Péter Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki Kar Járműgyártás és javítás Tanszék H-1111, Budapest Bertalan L.
Felső végükön egymásra támaszkodó szarugerendák egyensúlya
 1 Felső végükön egymásra támaszkodó szarugerendák egyensúlya Az [ 1 ] példatárban találtunk egy érdekes feladatot, melynek egy változatát vizsgáljuk meg itt. A feladat Ehhez tekintsük az 1. ábrát! 1. ábra
1 Felső végükön egymásra támaszkodó szarugerendák egyensúlya Az [ 1 ] példatárban találtunk egy érdekes feladatot, melynek egy változatát vizsgáljuk meg itt. A feladat Ehhez tekintsük az 1. ábrát! 1. ábra
DINAMIKA ALAPJAI. Tömeg és az erő
 DINAMIKA ALAPJAI Tömeg és az erő NEWTON ÉS A TEHETETLENSÉG Tehetetlenség: A testek maguktól nem képesek megváltoztatni a mozgásállapotukat Newton I. törvénye (tehetetlenség törvénye): Minden test nyugalomban
DINAMIKA ALAPJAI Tömeg és az erő NEWTON ÉS A TEHETETLENSÉG Tehetetlenség: A testek maguktól nem képesek megváltoztatni a mozgásállapotukat Newton I. törvénye (tehetetlenség törvénye): Minden test nyugalomban