Ipari robotok. szerkezeti egységei
|
|
|
- Márk Balázs
- 8 évvel ezelőtt
- Látták:
Átírás
1 ROBOTTECHNIKA Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ

2 A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk Energiaforrásuk Méretük stb. szerint 2

3 Robotok osztályozása mozgásuk szerint: Csak a célpont c programozható (pont-szakasz vezérl rlés) PTP (point( to point,, pontról l pontra) A pálya p paraméterei is programozhatók (pályavez lyavezérlés) CP (continuous( path, folymatos pálya) Munkaterületük szerint: Deréksz kszögű,, koordinátás s (hasáb b munkaterület letű) Hengerkoordinátás s robot Gömb koordinátás s robot SCARA típust pusú robot 3
 Hengerkoordinátás s robot Gömb koordinátás s robot SCARA")
4 Vezérlésük szerint: Alacsony költsk ltségű (PLC jellegű) ) vezérl rlés Nagy tudású (CNC jellegű) ) vezérl rlés Intelligens (mesterséges intelligencia funkciókat kat alkalmazó) ) vezérl rlés Feladatuk szerint: Anyagkezelő robot (Industrial( Handling) Technológiai művelet m végzv gző robot Szerelő robot 4
 Technológiai művelet m végzv gző robot Szerelő")
5 Energia forrás szerint: Villamos hajtású robot Hidraulikus robot Pneumatikus robot 5

6 Elvi felépítésük: ÚTMÉRŐ RENDSZER IRÁNYÍTÁS HAJTÁSOK KAR - RENDSZER MEGFOGÓ SZERKEZET TÁRGYI KÖRNYEZE T FELISMERŐ RENDSZER 6

7 Robotok elvi felépítése Robot elvi felépítése

8 Ipari robotok osztályozása Részegységek: Kinematika Az effektor és s a tárgy t térbeli t hozzárendel rendelése Az effektor mozgása és s a mozgástengelyek időbeli hozzárendel rendelése Effektor A A tárgyak t megfogása, megmunkálása A A tárgyak t közötti k kapcsolat létrehozása 8

9 Ipari robotok osztályozása Hajtás A A mozgástengelyek és s az effektorok energiaigény nyének nek biztosítása sa Irányításs A A mozgatási szekvenciák vezérl rlése és s felügyelete 9

10 Ipari robotok osztályozása Szenzorok A A robot, manipulátor belső állapotának érzékelése (helyzet, sebesség, szöghelyzet, erők, nyomatékok) A A tárgy t és s a környezete k állapotának érzékelése Fizikai mennyiségek mérésem A A tárgyak t felismerése se és s helyzet meghatároz rozása Környezetanalíziszis 10

11 Ipari robotok osztályozása Programrendszer Software, a vezérl rlőprogramok létrehozása Számítógép Vezérl rlőprogram végrehajtv grehajtás Vezérl rlő program-fejleszt fejlesztés segítése Szenzorok feldolgozása és s a vezérl rlő program módosm dosításasa 11

12 Ipari robotok osztályozása Robot jellemzők: Súlytartomány Mozgástengelyek elhelyezkedése, szabadságfokok Pozícion cionálási pontosság Terhelhetőség Sebességek a megfogó szerkezeten mérvem sok a megfogó szerkezeten mérvem Gyorsulások a Kézcsuklón megengedett statikus terhelés Hajtásrendszer Vezérl rlés Programozás Programnyelv A teljes rendszer felépítése Periféri riák Száll llítási feltételek telek 12

13 Ipari robotok osztályozása Robot perifériák igm munkadarabforgató periféria 13

14 Ipari robot két k t részre r bontható: alapgépre pre effektorra Alapgép p feladata: : az effektort a térben t (vagy síkban) előírt módon m mozgassa, és s felvegye a különböző erőhat hatásokat. Az alapgép p tovább bontható: Vázra (merev tagok mozgathatóan an összakapcsolt együttese) és Hajtásra (feladata a váz v z mozgatása) Az effektor lehet: megfogószerkezet szerkezet,, illetve szerszám 14
 Az effektor lehet: megfogószerkezet szerkezet,, illetve")
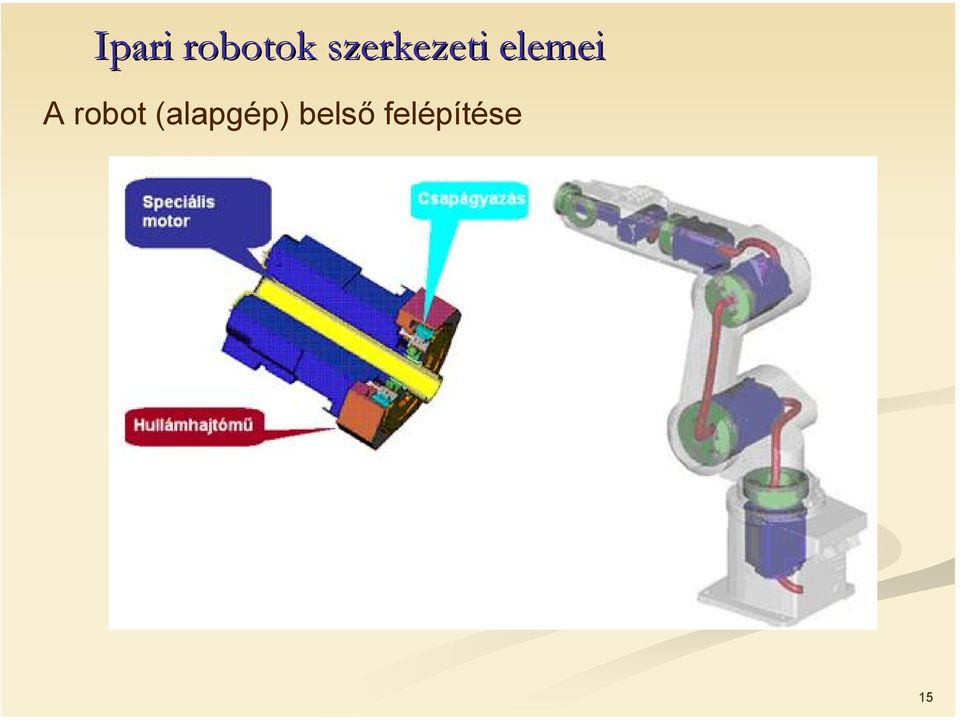
15 A robot (alapgép) belső felépítése 15
16 Teherviselő elemek, karok Működés s közben k a manipulátorra az alábbi erők hatnak: Súlyerő ( a manipulátor súlya, s a megfogóban lévő súly, a szerszám m súlya) s Súrlódási ellenáll llás (mozgáskor fellépő,, az egymáson elmozduló részek között, k fellépő ellenáll llás s a vezetékekben a csuklóban) Tehetetlenségi erő ( gyorsított tömegek t esetén mind egyenes vonalú,, mind forgó mozgás esetén) Technológiai erő ( pl. szereléskor, skor, felülettiszt lettisztításkor, skor, sorjázáskor skor stb. fellépő erő) 16
 Technológiai erő ( pl. szereléskor, skor, felülettiszt lettisztításkor, skor, sorjázáskor skor stb.")
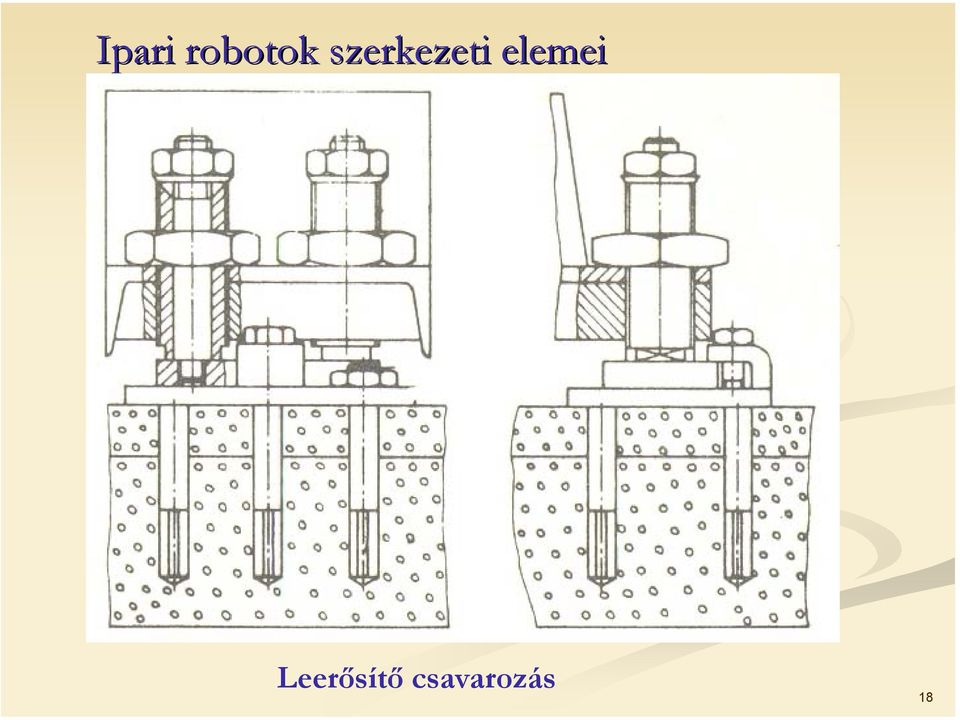
17 A súrlódó erők (nyomatékok) belső erők, azaz a hajtóelemek által kifejtett erők, nyomatékok kiegyensúlyozz lyozzák k ( a manipulátor egész szének egyensúlya szempontjából l nem játszanak j szerepet) A szerszámg mgépekhez viszonyítva a robotra ható súlyerők kisebbek, de a tehetetlenségi erők viszont nagyobbak, a technológiai erők pedig külső erőként hatnak! Nem elegendő az állórész megtámaszt masztása, sa, hanem húzóerőt t is biztosító lecsavarozást t kell alkalmazni. (ábra az állvány magassági gi helyzete is beáll llítható) 17

18 Leerősítő csavarozás 18
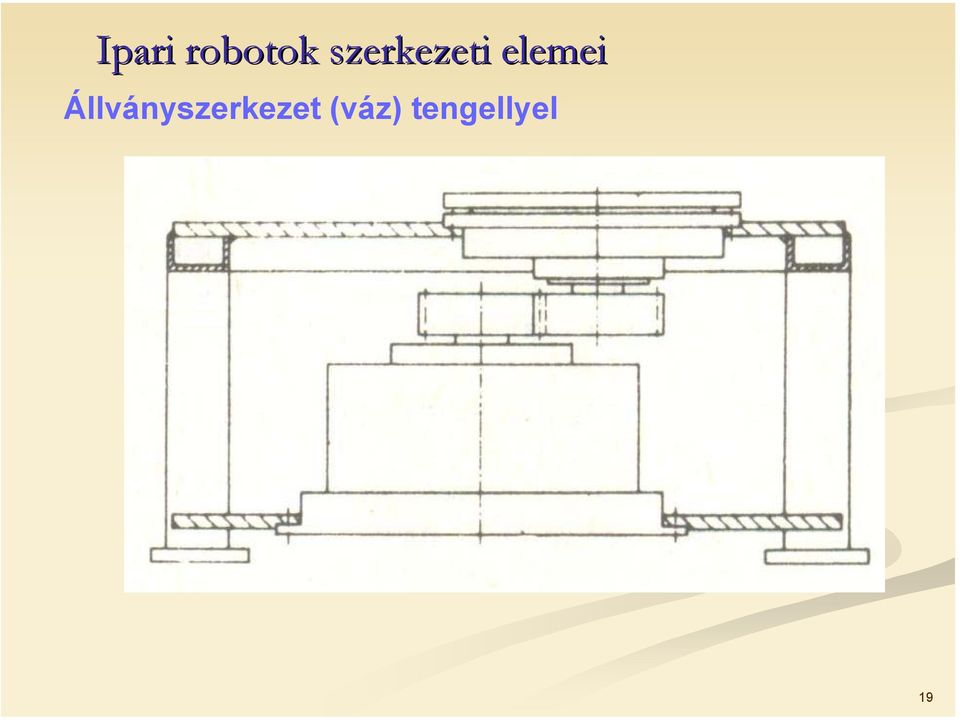
19 Állványszerkezet (váz) tengellyel 19
20 Ipari robot alapzata 20

21 A A teherviselő elemek, karok szerepe (az erők felvétel telén n túl), t hogy a szennyeződés s elleni védelem v és s a jobb megjelenés érdekében magukba foglalják a mozgatás s hajtásl sláncát. csőszer szerű szerkezet. A vékonyfalú zárt szelvény szilárds rdsági szempontból is kedvező,, az anyagot jól j kihasználja. A A karokra összetett igénybev nybevétel hat, ennek jelentős része csavarás.. A csavart vékonyfalv konyfalú,, zárt z keresztmetszetű csövek merevsége (az egységnyi gnyi szögű elcsavarodást st okozó nyomaték k nagysága) ga) a csavarási si másodrendm sodrendű nyomatékkal arányos. Bizonyítható,, hogy a köralakú cső 60%-kal merevebbmint a négyzetalakú. 21
22 Ha különbk nböző falvastagságú,, de azonos súlys lyú csöveket hasonlítunk össze, melyek keresztmetszeti területe állandó,, akkor adott súlys lyú csőnél l a falvastagság g csökken kkenésével négyzetesen nőn a merevség. A falvastagságot got a lehetőségek határáig csökkenteni kell. Ezek a határok: a csatlakoztathatóság g a kapcsolódó alkatrészhez (csavarozással, ssal, hegesztéssel), ssel), és s a cső,, mint héjszerkezet h stabilitása sa (ellenáll llás s horpadással szemben). 22
23 Ipari robotok terhelhetősége Gyakorlati szempontból is igen fontos robot jellemző a robot terhelhetősége. Belátható, hogy a robot tényleges terhelhetősége az előzőekben tárgyalt tényezőkön túl erőteljesen függ attól is, hogy a külső terhelő erők eredője a munkatér melyik pontjában terheli a robotot. A robotok kiválasztásánál, a robotos rendszer tervezésénél kiinduló alapadat a munkafolyamattól függő terhelhetőség. A robotok katalógusai minden esetben tartalmazzák a terhelhetőségi diagramot, amely az un. kinyúlás, illetve kinyúlások függvényében megadja a maximális terhelhetőséget. 23
24 Ipari robotok terhelhetősége Példaképpen: az ábra az ABB IRB 140-es ipari robot terhelési diagramját szemlélteti a Z és az L tengelyek mentén megvalósuló kinyúlások függvényében. Fontos megjegyezni, hogy a diagramban szereplő tömeg adatok a manipulálandó tárgy és a megfogó szerkezet együttes tömegét, illetve technológiai műveletet végző robotnál a szerszám tömegét jelentik. 24
25 Ipari robotok terhelhetősége A terhelőerő robottípustól függően - néhány tized N nagyságrendtől (mikro-robot) több ezer N értékig változhat. Ezt rendszerint két adattal jellemzik: legnagyobb sebességű mozgáshoz tartozó terhelhetőség redukált (rendszerint 50%-os) sebességhez tartozó terhelhetőség A robot fejrészét - a megfogó szerkezettel, illetve a szerszámmal együtt - úgy kell megtervezni, hogy a specifikációban megadottnál nagyobb erő illetve nyomaték ne érje a robotot. 25
26 Ipari robotok terhelhetősége Robot terhelhetősége az 5-ös és a 6-os csukló helyzetének függvényében térbeli 26
27 Vezetékek, csuklók Definíció: a manipulátorváz merev tagjait olyan szerkezeti egységek kapcsolják össze, amelyek az egyik tagnak a másik taghoz képest egy szabadságfokú mozgását teszi lehetővé. Mozgás iránya: vezetékeknél egyenes vonalú csuklóknál forgó mozgás (tengely körül) A forgó mozgás elvileg lehet folyamatos, de a robotnál erre nincs szükség. Megjegyzés: Forgó karokkal 2π -nél kisebb elfordulással is be lehet járni a munkateret. 2
28 Vezetékek, csuklók szerkezete, tulajdonságai Tulajdonságok Vezetékek és s csuklók k tulajdonságai Vezeték Csukló Alkalmazás 40% 40% Helyigény Merevség nagyobb - nagyobb - Hatásfok - kedvezőbb Manőverez verezőképesség - kedvezőbb Vezérl rlés - bonyolultabb Megjegyzés: A csuklók teljes szerkezeti kialakítása elfér a csatlakozókarok keresztmetszetének belsejében. 3
29 Egyenesvonalú vezetékek Szerkezeti kialakítás szerint 2 csoportra oszthatók: Csúszó Görgős STAR vezetékek 4
30 Csúszó és gördülő vezetékek tulajdonságai Tulajdonságok Költségek Helyigény Csúsz szó Vezeték k típusat Gördülő olcsóbb - kisebb - Surlódási ellenáll llás - kisebb Merevség - nagyobb Csillapítás Szennyeződésekkel szembeni érzékenység jobb - kevésb sbé érzékeny - Holtjáték - holtjáték k mentes Vontatási ellenáll llás - kicsi Akadozó csúsz szás - nincs Karbantartás - nem igényel Stick slip: akadozó csúszás kis v -nél 5
31 Gördülő vezetékek A gördülő vezetéket előfeszítve építik. Az egymáson elmozduló részeket belső erőrendszer szorítja össze, így merevséget és holtjáték mentességet lehet elérni. Hengeres görgős elemek 6
32 Gördülő vezetékek felépítése 4
33 Gördülő vezetékek A gördülő kapcsolat miatt kicsi a vontatási ellenállás, és nincs akadozó csúszás (stick slip) jelenség. Karbantartást nem igényelnek, a beépítéskor elvégzett zsírzás a teljes élettartamra elegendő. Rövid elmozdulásokn soknál görgősoros vezetéket építenek. 6
34 Gördülő vezetékek Rövid elmozdulásoknál görgősor, hosszabb elmozdulásoknál edzett acélsínen gördülő betétek. A kör keresztmetszetű sínt a golyókat tartalmazó persely vagy teljesen körbefogja, vagy csak patkóalakban kb.: π/2 ívnyílás, ívszakasz kihagyásával fogja át.
35 Perselyek kör keresztmetszetű vezetékekhez Kör keresztmetszetű vezeték
36 Csúszóvezetékek Anyagpárosítás: edzett acél (hosszú vezeték) műanyag Hosszú vezeték keresztmetszete lehet: kör négyszög A rövid vezetéken a műanyagot, vagy kötés előtt öntik, kenik a síkfelületre, vagy perselyenként 1-2 mm vastag lapot hajlítanak. 6
37 Csúszó- gördülő vezetékek Az egyenes vezetéknek fel kell vennie: a vezetékre ható merőleges irányú erőket és a mindenirányú nyomatékot Robot, manipulátor egyenesvonalú vezetékkel 37
38 Csúszó- gördülő vezetékek igm robot állványok Robot, manipulátor egyenesvonalú vezetékkel 38
39 Csúszó- gördülő vezetékek Görgős elem csatlakoztatása: két hosszú vezetéken keresztül (sínen) Teleszkópos jellegű egyenes vezetékek: viszonylag nagysúlyú (450N) munkadarabok mozgatása helytakarékosabb
40 Görgős papucsok Gyakran alkalmaznak egyenes vonalú vezetésre görgős papucsokat. A görgős papucsok beépítésével biztosítható a vezetékre merőleges irányú erők, illetve mindenirányú nyomatékok felvétele.
41 Gördülő vezetékek Fanuc robot Vezeték két robot utaztatása
42 A RÁBA kovácsüzemében megvalósított robotos rendszer speciális vezetéke Ipari robotok szerkezeti elemei
43 1.3. Forgó vezetékek, csuklók A robotok forgó tengelyeinél lévő csapágyak igénybevétele jelentősen eltér a szokásos forgó géptengelyek csapágyainak igénybevételétől. Jellemzői: robotkarok szögsebessége kicsi elfordulási szög korlátozott működés szakaszos Csapágyazás lehet: csúszó gördülő 43
44 1.3. Forgó vezetékek, csuklók Csúszó csapágyak tulajdonságai: kis szerkezeti méret műanyag(pl.:teflon) perselyben futó acél tengely a legelterjedtebb megfogók közelében alkalmazzák Gördülő csapágyak esetén teljesítendő: Elég nagy furatátmérő hajtáslánc a csuklószerkezet belsejében 44 ultrakönnyű csapágyak
45 A függőleges mozgatás (Z tengely) a szerszámgépeknél is gyakran alkalmazott egyszerű, de jó megoldás: motor, fogazott szíj és golyósorsó összeépítése (FANUC) (lásd ábra). Ipari robotok szerkezeti elemei 45
46 Forgó vezetékek, csuklók
47 Köszönöm m a figyelmet!
GÉPIPARI AUTOMATIZÁLÁS Ipari robotok. szerkezeti egységei
 GÉPIPARI AUTOMATIZÁLÁS Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk
GÉPIPARI AUTOMATIZÁLÁS Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk
ROBOTTECHNIKA. Ipari robotok szerkezeti egységei, terhelhetősége. Dr. Pintér József
 ROBOTTECHNIKA Ipari robotok szerkezeti egységei, terhelhetősége Dr. Pintér József Tartalom Ipari robotok osztályozása Ipari robotok szerkezeti egységei Ipari robotok terhelhetősége Vezetékek, csapágyak
ROBOTTECHNIKA Ipari robotok szerkezeti egységei, terhelhetősége Dr. Pintér József Tartalom Ipari robotok osztályozása Ipari robotok szerkezeti egységei Ipari robotok terhelhetősége Vezetékek, csapágyak
Ipari robotok osztályozása, szerkezeti egységei
 ROBOTTECHNIKA Ipari robotok osztályozása, szerkezeti egységei 3. előadás Dr. Pintér József A robotok osztályozhatók: Robotok osztályozása, felépítésük Mozgásuk Munkaterületük Felépítésük Vezérlésük Feladatuk
ROBOTTECHNIKA Ipari robotok osztályozása, szerkezeti egységei 3. előadás Dr. Pintér József A robotok osztályozhatók: Robotok osztályozása, felépítésük Mozgásuk Munkaterületük Felépítésük Vezérlésük Feladatuk
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
Ipari robotok megfogó szerkezetei
 IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó
IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó
CNC programozás. Alap ismeretek. Készített: Hatos István
 CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
6. Robotok és manipulátorok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
Pneumatika az ipari alkalmazásokban
 Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
GYÁRTÓCELLÁK IPARI ROBOTOK. Összefoglaló áttekintés. 1. előadás. Dr. Pintér József. Gyártócellák
 GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
ROBOTTECHNIKA ALKALMAZÁSOK, ROBOT FOGALMA. Dr. Pintér József
 ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
Gyártástechnológia alapjai
 Gyártástechnológia alapjai BAGGA11MNC SZERSZÁMGÉPEK 2. Előadás Egyetemes eszterga Eszterga kinematikai vázlata Esztergák 2 Szerszámgépek főbb szerkezeti egységei: Motor Ágyak, állványok Vezetékek, szánok
Gyártástechnológia alapjai BAGGA11MNC SZERSZÁMGÉPEK 2. Előadás Egyetemes eszterga Eszterga kinematikai vázlata Esztergák 2 Szerszámgépek főbb szerkezeti egységei: Motor Ágyak, állványok Vezetékek, szánok
GYÁRTÓCELLÁK IPARI ROBOTOK. Összefoglaló áttekintés. 1. előadás. Dr. Pintér József. Gyártócellák
 GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
HELYI TANTERV. Mechanika
 HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
+ Egyszeres muködésu szögletes henger: +Tömlohenger: (17. ábra) Jellemzok
 Jellemzok") 19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
Ipari robotok hajtása
 IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
GÉPIPARI AUTOMATIZÁLÁS
 GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
Gyártórendszerek fejlődésének fázisai
 Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Mit nevezünk nehézségi erőnek?
 Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS!
 Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás
 Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
203 00 00 00 Szerkezettan
 1. oldal 1. 100870 203 00 00 00 Szerkezettan A faanyagokat környezeti hatások nem károsítják, nem igényelnek kezelést. 2. 100871 203 00 00 00 Szerkezettan A szálerõsítésû mûanyagok nagy szilárdságú szálakból
1. oldal 1. 100870 203 00 00 00 Szerkezettan A faanyagokat környezeti hatások nem károsítják, nem igényelnek kezelést. 2. 100871 203 00 00 00 Szerkezettan A szálerõsítésû mûanyagok nagy szilárdságú szálakból
Golyós hüvely Raktári program
 Golyós hüvely Raktári program A Tech-Con Hungária Kft. lineáris technika kategóriájában megtalálhatóak az NTN-SNR kiváló minőségű termékei. Mint tervező, fejlesztő és gyártó, az NTN-SNR a világ harmadik
Golyós hüvely Raktári program A Tech-Con Hungária Kft. lineáris technika kategóriájában megtalálhatóak az NTN-SNR kiváló minőségű termékei. Mint tervező, fejlesztő és gyártó, az NTN-SNR a világ harmadik
FANUC Robottípusok, alkalmazások. Anyagmozgatás, szerelés, stb. Festés, lakkozás. Hegesztés
 FANUC Ipari Robotok FANUC Robottípusok, alkalmazások Festés, lakkozás Anyagmozgatás, szerelés, stb. Hegesztés Festő robotcellák A festő cellák sajátosságai általában: Speciális robbanásbiztos cella elszívással
FANUC Ipari Robotok FANUC Robottípusok, alkalmazások Festés, lakkozás Anyagmozgatás, szerelés, stb. Hegesztés Festő robotcellák A festő cellák sajátosságai általában: Speciális robbanásbiztos cella elszívással
NGB_AJ008_1 IPARI ROBOTOK
 Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
6. Robotok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
Frissítve: Csavarás. 1. példa: Az 5 gyakorlat 1. példájához hasonló feladat.
 1. példa: Az 5 gyakorlat 1. példájához hasonló feladat. Mekkora a nyomatékok hatására ébredő legnagyobb csúsztatófeszültség? Mekkora és milyen irányú az A, B és C keresztmetszet elfordulása? Számítsuk
1. példa: Az 5 gyakorlat 1. példájához hasonló feladat. Mekkora a nyomatékok hatására ébredő legnagyobb csúsztatófeszültség? Mekkora és milyen irányú az A, B és C keresztmetszet elfordulása? Számítsuk
SZÉCHENYI ISTVÁN EGYETEM GYŐR. Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán Robotcella A robotcella fő elemei: Robot Robot fejegység (effektor), Több fej esetén tartóállvány Biztonsági elkerítés
SZÉCHENYI ISTVÁN EGYETEM GYŐR Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán Robotcella A robotcella fő elemei: Robot Robot fejegység (effektor), Több fej esetén tartóállvány Biztonsági elkerítés
6. MECHANIKA-STATIKA GYAKORLAT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya, Culmann-szerkesztés, Ritter-számítás
 ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat)
") ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat) Erővel záró nyomatékkötések Hatáselve: a kapcsolódó felületre merőleges rugalmas szorítás hatására a felület érintőjének irányába ható terheléssel ellentétes irányban ébredő
ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat) Erővel záró nyomatékkötések Hatáselve: a kapcsolódó felületre merőleges rugalmas szorítás hatására a felület érintőjének irányába ható terheléssel ellentétes irányban ébredő
670 milliszekundumos csomagolási ciklusidő
 670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
CNC Függőleges megmunkálóközpont
 GO98 AKCIÓ a Bemutatóteremből egyenesen az Ön üzemébe CNC Függőleges megmunkálóközpont HSM-116A Mozgástartomány X tengely 1,100mm Y tengely 650mm Z tengely 600mm GO98 SZERSZÁMGÉPEK HSM-116A Oldal: 1-12
GO98 AKCIÓ a Bemutatóteremből egyenesen az Ön üzemébe CNC Függőleges megmunkálóközpont HSM-116A Mozgástartomány X tengely 1,100mm Y tengely 650mm Z tengely 600mm GO98 SZERSZÁMGÉPEK HSM-116A Oldal: 1-12
Osztályozó, javító vizsga 9. évfolyam gimnázium. Írásbeli vizsgarész ELSŐ RÉSZ
 Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Szerszámgépek. 1999/2000 II. félév Dr. Lipóth András által leadott anyagrész vázlata
 Szerszámgépek 1999/000 II. félév Dr. Lipóth András által leadott anyagrész vázlata Megjegyzés: További információ a View/Notes Page módban olvasható. Korszerű szerszámgép Gépészeti szempontból a CNC szerszámgép
Szerszámgépek 1999/000 II. félév Dr. Lipóth András által leadott anyagrész vázlata Megjegyzés: További információ a View/Notes Page módban olvasható. Korszerű szerszámgép Gépészeti szempontból a CNC szerszámgép
A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás. 2012/13 2. félév Dr.
 A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás 2012/13 2. félév Dr. Kulcsár Gyula Forgácsolás, fúrás, furatmegmunkálás Forgácsolás Forgácsoláskor
A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás 2012/13 2. félév Dr. Kulcsár Gyula Forgácsolás, fúrás, furatmegmunkálás Forgácsolás Forgácsoláskor
Mérnöki alapok 2. előadás
 Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Gépgyártástechnológiai technikus szakma gyakorlati oktatásához OKJ száma: 54 521 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Foglalkozási napló a 20 /20. tanévre Gépgyártástechnológiai technikus szakma gyakorlati oktatásához OKJ száma: 54 521 03 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma:
Melléklet MŰSZAKI PARAMÉTEREK. MVD ishear B / SZAKMAI JELLEMZŐK. Mechanikus lemezolló gép
 Atlanti-Szerszám Kereskedelmi és Szolgáltató Kft. Magyarország Tel.: +36 62 444 021 Fax: +36 62 440 753 E-mail: info@atlanti-szerszam.hu Web: www.atlanti-szerszam.hu Melléklet MŰSZAKI PARAMÉTEREK / SZAKMAI
Atlanti-Szerszám Kereskedelmi és Szolgáltató Kft. Magyarország Tel.: +36 62 444 021 Fax: +36 62 440 753 E-mail: info@atlanti-szerszam.hu Web: www.atlanti-szerszam.hu Melléklet MŰSZAKI PARAMÉTEREK / SZAKMAI
6. MECHANIKA-STATIKA GYAKORLAT (kidolgozta: Triesz Péter, egy. ts.; Tarnai Gábor, mérnöktanár)
") SZÉHNYI ISTVÁN GYT LKLZOTT HNIK TNSZÉK 6. HNIK-STTIK GYKORLT (kidolgozta: Triesz Péter egy. ts.; Tarnai Gábor mérnöktanár) Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa gy létrát egy
SZÉHNYI ISTVÁN GYT LKLZOTT HNIK TNSZÉK 6. HNIK-STTIK GYKORLT (kidolgozta: Triesz Péter egy. ts.; Tarnai Gábor mérnöktanár) Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa gy létrát egy
W = F s A munka származtatott, előjeles skalármennyiség.
 Ha az erő és az elmozdulás egymásra merőleges, akkor fizikai értelemben nem történik munkavégzés. Pl.: ha egy táskát függőlegesen tartunk, és úgy sétálunk, akkor sem a tartóerő, sem a nehézségi erő nem
Ha az erő és az elmozdulás egymásra merőleges, akkor fizikai értelemben nem történik munkavégzés. Pl.: ha egy táskát függőlegesen tartunk, és úgy sétálunk, akkor sem a tartóerő, sem a nehézségi erő nem
CNC gépek szerszámellátása
 CNC gépek szerszámellátása Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek I.-II., BMF Czéh Mihály Hervay Péter
CNC gépek szerszámellátása Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek I.-II., BMF Czéh Mihály Hervay Péter
GÉPÉSZETI ALAPISMERETEK TÉMAKÖRÖK
 GÉPÉSZETI ALAPISMERETEK KÖZÉPSZINTŰ ÉRETTSÉGI TÉMAKÖRÖK Preisz Csaba mérnök-tanár Műszaki mechanika Statikai alapfogalmak - Erőrendszer fogalma - Vektorokkal végezhető alapműveleteket (erők felbontása,
GÉPÉSZETI ALAPISMERETEK KÖZÉPSZINTŰ ÉRETTSÉGI TÉMAKÖRÖK Preisz Csaba mérnök-tanár Műszaki mechanika Statikai alapfogalmak - Erőrendszer fogalma - Vektorokkal végezhető alapműveleteket (erők felbontása,
7. Élettartam növelő megmunkálások (tartósság növelő)
") 7. Élettartam növelő megmunkálások (tartósság növelő) Gépek működésekor igénybevétel elületi elületi réteg belső keresztmetszet Felületi mikrogeometria (érdesség) hatással van a: kopásállóságra áradási
7. Élettartam növelő megmunkálások (tartósság növelő) Gépek működésekor igénybevétel elületi elületi réteg belső keresztmetszet Felületi mikrogeometria (érdesség) hatással van a: kopásállóságra áradási
DFTH november
 Kovács Ernő 1, Füves Vktor 2 1,2 Elektrotechnka és Elektronka Tanszék Mskolc Egyetem 3515 Mskolc-Egyetemváros tel.: +36-(46)-565-111 mellék: 12-16, 12-18 fax : +36-(46)-563-447 elkke@un-mskolc.hu 1, elkfv@un-mskolc.hu
Kovács Ernő 1, Füves Vktor 2 1,2 Elektrotechnka és Elektronka Tanszék Mskolc Egyetem 3515 Mskolc-Egyetemváros tel.: +36-(46)-565-111 mellék: 12-16, 12-18 fax : +36-(46)-563-447 elkke@un-mskolc.hu 1, elkfv@un-mskolc.hu
HELYI TANTERV. Gépelemek-géptan
 HELYI TANTERV Gépelemek-géptan 14. évfolyam 72 óra 1.1. A tantárgy tanításának célja A gépelemek-géptan tantárgy tanításának célja, a közlekedéstechnikai gyakorlatban szükséges készségek megszerzése, a
HELYI TANTERV Gépelemek-géptan 14. évfolyam 72 óra 1.1. A tantárgy tanításának célja A gépelemek-géptan tantárgy tanításának célja, a közlekedéstechnikai gyakorlatban szükséges készségek megszerzése, a
Infobionika ROBOTIKA. IX. Előadás. Robot manipulátorok I. Alapfogalmak. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Mechanika. Kinematika
 Mechanika Kinematika Alapfogalmak Anyagi pont Vonatkoztatási és koordináta rendszer Pálya, út, elmozdulás, Vektormennyiségek: elmozdulásvektor Helyvektor fogalma Sebesség Mozgások csoportosítása A mozgásokat
Mechanika Kinematika Alapfogalmak Anyagi pont Vonatkoztatási és koordináta rendszer Pálya, út, elmozdulás, Vektormennyiségek: elmozdulásvektor Helyvektor fogalma Sebesség Mozgások csoportosítása A mozgásokat
Robotika. A robotok története - bevezetés. Magyar Attila amagyar@almos.vein.hu
 Robotika A robotok története - bevezetés Magyar Attila amagyar@almos.vein.hu A robotok története Idő Irodalmi utalás, esemény Robot, vagy szerkezet Kr.e.1000 Kr.e. 800 Kr.e. 400 Kr.e. 300 Biblia (Ter.):
Robotika A robotok története - bevezetés Magyar Attila amagyar@almos.vein.hu A robotok története Idő Irodalmi utalás, esemény Robot, vagy szerkezet Kr.e.1000 Kr.e. 800 Kr.e. 400 Kr.e. 300 Biblia (Ter.):
Tervezés katalógusokkal kisfeladat
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes tervezés, méretezés és gyártás (BME KOJHM401) Tervezés katalógusokkal kisfeladat Járműelemek és Járműszerkezetanalízis Tanszék Ssz.:...... Név:.........................................
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes tervezés, méretezés és gyártás (BME KOJHM401) Tervezés katalógusokkal kisfeladat Járműelemek és Járműszerkezetanalízis Tanszék Ssz.:...... Név:.........................................
A forgójeladók mechanikai kialakítása
 A forgójeladók mechanikai kialakítása A különböző gyártók néhány szabványos kiviteltől eltekintve nagy forma- és méretválasztékban kínálják termékeiket. Az elektromos illesztéshez hasonlóan a mechanikai
A forgójeladók mechanikai kialakítása A különböző gyártók néhány szabványos kiviteltől eltekintve nagy forma- és méretválasztékban kínálják termékeiket. Az elektromos illesztéshez hasonlóan a mechanikai
MEGMUNKÁLÁSI TECHNOLÓGIÁK AJ005_2. Forgácsoló szerszámgépek
 MEGMUNKÁLÁSI TECHNOLÓGIÁK AJ005_2 Gépészmérnöki (BSc) szak Járműmérnöki (BSc) szak Forgácsoló szerszámgépek 3-4. előadás Összeállította: Dr. Pintér József Forgácsoló szerszámgépek Kinematikai alapok, mozgások
MEGMUNKÁLÁSI TECHNOLÓGIÁK AJ005_2 Gépészmérnöki (BSc) szak Járműmérnöki (BSc) szak Forgácsoló szerszámgépek 3-4. előadás Összeállította: Dr. Pintér József Forgácsoló szerszámgépek Kinematikai alapok, mozgások
HORVÁTH ATTILA EV. CÉG alapítva:1989. www.mechanika.hu
 HORVÁTH ATTILA EV. CÉG alapítva:1989 www.mechanika.hu TMT új L sorozatú CNC eszterga-gépcsaládja egyenlő: minőség, átlagon felüli teljesítmény. Nagy pontosság, maximális stabilitás! Hatékony TMT- esztergák,
HORVÁTH ATTILA EV. CÉG alapítva:1989 www.mechanika.hu TMT új L sorozatú CNC eszterga-gépcsaládja egyenlő: minőség, átlagon felüli teljesítmény. Nagy pontosság, maximális stabilitás! Hatékony TMT- esztergák,
Web: www.smtech.hu Rövid cégnév: Smtech Kft.
 Web: www.smtech.hu Rövid cégnév: Smtech Kft. E-mail: office@smtech.hu Tel: +36/30/325-3428 (Hederics Tamás Kereskedelmi Igazgató) Rólunk mondták: Eddig 3 gépet rendeltünk a Sheet Metál Technológia Kft-től.
Web: www.smtech.hu Rövid cégnév: Smtech Kft. E-mail: office@smtech.hu Tel: +36/30/325-3428 (Hederics Tamás Kereskedelmi Igazgató) Rólunk mondták: Eddig 3 gépet rendeltünk a Sheet Metál Technológia Kft-től.
Oktatási Hivatal FIZIKA I. KATEGÓRIA. A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FELADATOK
 Oktatási Hivatal A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA I. KATEGÓRIA FELADATOK Bimetal motor tulajdonságainak vizsgálata A mérőberendezés leírása: A vizsgálandó
Oktatási Hivatal A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA I. KATEGÓRIA FELADATOK Bimetal motor tulajdonságainak vizsgálata A mérőberendezés leírása: A vizsgálandó
A 29/2016. (VIII. 26.) NGM rendelet által módosított 27/2012 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján.
 NGM rendelet által módosított 27/2012 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján.") A 29/2016. (VIII. 26.) NGM rendelet által módosított 27/2012 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 31 521 08 Műanyag hegesztő Tájékoztató
A 29/2016. (VIII. 26.) NGM rendelet által módosított 27/2012 (VIII. 27.) NGM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 31 521 08 Műanyag hegesztő Tájékoztató
2010.08.29. Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása. Kézi Gépesített Automatizált
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Forgácsolás technológia számítógépes BAGFS15NNC/NLC 11 - A szerelés automatizálása Dr.
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Forgácsolás technológia számítógépes BAGFS15NNC/NLC 11 - A szerelés automatizálása Dr.
Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő évi kerettanterve alapján. 10. évfolyam
 Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő 2018. évi kerettanterve alapján 10. évfolyam Számonkérés: feladatlap megoldása, szóbeli tétel húzása Szükséges eszközök: toll Bevezetés, kötőgépelemek,
Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő 2018. évi kerettanterve alapján 10. évfolyam Számonkérés: feladatlap megoldása, szóbeli tétel húzása Szükséges eszközök: toll Bevezetés, kötőgépelemek,
TR-800/2700 D CNC. A projekt az Európai Unió támogatásával, az Európai Regionális Fejlesztési Alap társfinanszírozásával valósult meg.
 TR-800/2700 D CNC GÖRGGÉP VASÚTI TENGELYEK FELKEMÉNYÍTÉSÉHEZ ÉS FELÜLETI MINSÉG JAVÍTÁSÁHOZ A projekt az Európai Unió támogatásával, az Európai Regionális Fejlesztési Alap társfinanszírozásával valósult
TR-800/2700 D CNC GÖRGGÉP VASÚTI TENGELYEK FELKEMÉNYÍTÉSÉHEZ ÉS FELÜLETI MINSÉG JAVÍTÁSÁHOZ A projekt az Európai Unió támogatásával, az Európai Regionális Fejlesztési Alap társfinanszírozásával valósult
Szilárd testek rugalmassága
 Fizika villamosmérnököknek Szilárd testek rugalmassága Dr. Giczi Ferenc Széchenyi István Egyetem, Fizika és Kémia Tanszék Győr, Egyetem tér 1. 1 Deformálható testek (A merev test idealizált határeset.)
Fizika villamosmérnököknek Szilárd testek rugalmassága Dr. Giczi Ferenc Széchenyi István Egyetem, Fizika és Kémia Tanszék Győr, Egyetem tér 1. 1 Deformálható testek (A merev test idealizált határeset.)
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA. 1. előadás. Dr. Pintér József. Robottechnika
 ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
TestLine - 7. Fizika Témazáró Erő, munka, forgatónyomaték Minta feladatsor
 gészítsd ki a mondatot! egyenes vonalú egyensúlyban erő hatások mozgást 1. 2:57 Normál Ha a testet érő... kiegyenlítik egymást, azt mondjuk, hogy a test... van. z egyensúlyban lévő test vagy nyugalomban
gészítsd ki a mondatot! egyenes vonalú egyensúlyban erő hatások mozgást 1. 2:57 Normál Ha a testet érő... kiegyenlítik egymást, azt mondjuk, hogy a test... van. z egyensúlyban lévő test vagy nyugalomban
TestLine - 7. Fizika Témazáró Erő, munka, forgatónyomaték Minta feladatsor
 gészítsd ki a mondatokat Válasz lehetőségek: (1) a föld középpontja felé mutató erőhatást 1. fejt ki., (2) az alátámasztásra vagy a felfüggesztésre hat., (3) két 4:15 Normál különböző erő., (4) nyomja
gészítsd ki a mondatokat Válasz lehetőségek: (1) a föld középpontja felé mutató erőhatást 1. fejt ki., (2) az alátámasztásra vagy a felfüggesztésre hat., (3) két 4:15 Normál különböző erő., (4) nyomja
14. Tétel. Számjegyvezérlésű szerszámgépek: Vezérlés fogalma: CNC vezérlés felépítése:
 14. Tétel 14. Csoportosítsa a számjegyvezérlésű szerszámgépeket! Definiálja a vezérlés fogalmát! Sorolja fel, milyen vezérléseket ismer! Beszéljen a CNC vezérlés alapvető felépítéséről! Számjegyvezérlésű
14. Tétel 14. Csoportosítsa a számjegyvezérlésű szerszámgépeket! Definiálja a vezérlés fogalmát! Sorolja fel, milyen vezérléseket ismer! Beszéljen a CNC vezérlés alapvető felépítéséről! Számjegyvezérlésű
1. Mozgás Magyar Attila
 1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
TERVEZÉS KATALÓGUSOKKAL KISFELADAT
 Dr. Nyitrai János Dr. Nyolcas Mihály TERVEZÉS KATALÓGUSOKKAL KISFELADAT Segédlet a Jármű- és hajtáselemek III. tantárgyhoz Kézirat 2012 TERVEZÉS KATALÓGUSOKKAL KISFELADAT "A" típusú feladat: Pneumatikus
Dr. Nyitrai János Dr. Nyolcas Mihály TERVEZÉS KATALÓGUSOKKAL KISFELADAT Segédlet a Jármű- és hajtáselemek III. tantárgyhoz Kézirat 2012 TERVEZÉS KATALÓGUSOKKAL KISFELADAT "A" típusú feladat: Pneumatikus
45. HÉT/ 1. foglalkozás 3 óra STABILITÁS
 1/6 45. HÉT/ 1. foglalkozás 3 óra 081 04 00 00 STABILITÁS 081 04 01 00 Egyensúlyi feltételek stabilizált vízszintes repülésben 081 04 01 01 A statikus stabilitás előfeltételei 081 04 01 02 A nyomatékok
1/6 45. HÉT/ 1. foglalkozás 3 óra 081 04 00 00 STABILITÁS 081 04 01 00 Egyensúlyi feltételek stabilizált vízszintes repülésben 081 04 01 01 A statikus stabilitás előfeltételei 081 04 01 02 A nyomatékok
Pozicionáló rendszerek Lineáris tengelyek KK sorozat
 3. 3.. KK lineáris modulok tulajdonságai HIWIN KK lineáris modulok kompakt pozicionáló tengelyek. z előtolást egy golyós menetes orsós hajtás biztosítja, amely a motor kész meghajtó-karimába kerül tárolásra.
3. 3.. KK lineáris modulok tulajdonságai HIWIN KK lineáris modulok kompakt pozicionáló tengelyek. z előtolást egy golyós menetes orsós hajtás biztosítja, amely a motor kész meghajtó-karimába kerül tárolásra.
TAKISAWA TMM 200 ellenorsós CNC esztergagép, hajtott szerszámokkal és Y tengellyel FANUC 180is TB vezérl vel
 TAKISAWA TMM 200 ellenorsós CNC esztergagép, hajtott szerszámokkal és Y tengellyel FANUC 180is TB vezérl vel ALAPKIVITEL - 32 bit FANUC vezérlés, DNC, és internet csatlakozással, - 10,4 színes kijelz,
TAKISAWA TMM 200 ellenorsós CNC esztergagép, hajtott szerszámokkal és Y tengellyel FANUC 180is TB vezérl vel ALAPKIVITEL - 32 bit FANUC vezérlés, DNC, és internet csatlakozással, - 10,4 színes kijelz,
2011. tavaszi félév. CNC forgácsolás. Balla Sándor
 2011. tavaszi félév CNC forgácsolás Balla Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem, Járműgyártás és javítás Tanszék, 1111, Budapest, Bertalan L. u. 2. Z 608., tel./fax: +36 1 463-1694/ +36
2011. tavaszi félév CNC forgácsolás Balla Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem, Járműgyártás és javítás Tanszék, 1111, Budapest, Bertalan L. u. 2. Z 608., tel./fax: +36 1 463-1694/ +36
Forgácsoló gyártócellák, gyártórendszerek 2.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
 A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
BEMUTATÓ FELADATOK (2) ÁLTALÁNOS GÉPTAN tárgyból
 ÁLTALÁNOS GÉPTAN tárgyból") BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
Nyomás a dugattyúerők meghatározásához 6,3 bar. Nyersanyag:
 Dugattyúrúd nélküli hengerek Siklóhenger 16-80 mm Csatlakozások: M7 - G 3/8 Kettős működésű mágneses dugattyúval Integrált 1 Üzemi nyomás min/max 2 bar / 8 bar Környezeti hőmérséklet min./max. -10 C /
Dugattyúrúd nélküli hengerek Siklóhenger 16-80 mm Csatlakozások: M7 - G 3/8 Kettős működésű mágneses dugattyúval Integrált 1 Üzemi nyomás min/max 2 bar / 8 bar Környezeti hőmérséklet min./max. -10 C /
Forgácsolás technológia számítógépes tervezése I.
 Forgácsolás technológia számítógépes tervezése I. BAGFS15NNB Szerelési rendszer elemei Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása A szerelés automatizálása
Forgácsolás technológia számítógépes tervezése I. BAGFS15NNB Szerelési rendszer elemei Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása A szerelés automatizálása
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Melléklet MŰSZAKI PARAMÉTEREK. MVD ibend B / SZAKMAI JELLEMZŐK. Hidraulikus CNC vezérlésű élhajlító
 Atlanti-Szerszám Kereskedelmi és Szolgáltató Kft. Magyarország Tel.: +36 62 444 021 Fax: +36 62 440 753 E-mail: info@atlanti-szerszam.hu Web: www.atlanti-szerszam.hu Melléklet MŰSZAKI PARAMÉTEREK / SZAKMAI
Atlanti-Szerszám Kereskedelmi és Szolgáltató Kft. Magyarország Tel.: +36 62 444 021 Fax: +36 62 440 753 E-mail: info@atlanti-szerszam.hu Web: www.atlanti-szerszam.hu Melléklet MŰSZAKI PARAMÉTEREK / SZAKMAI
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN
 BUDAPESTI MSZAKI FISKOLA BÁNKI DONÁT GÉPÉSZMÉRNÖKI FISKOLAI KAR GÉPGYÁRTÁSTECHNOLÓGIAI TANSZÉK HÁZIFELADAT ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN Készítette: Minségügyi Szakmérnök I.évf. hallgató
BUDAPESTI MSZAKI FISKOLA BÁNKI DONÁT GÉPÉSZMÉRNÖKI FISKOLAI KAR GÉPGYÁRTÁSTECHNOLÓGIAI TANSZÉK HÁZIFELADAT ÉRTÉKELEMZÉS A GYÁRTMÁNY- ÉS MINSÉGFEJLESZTÉSBEN Készítette: Minségügyi Szakmérnök I.évf. hallgató
Forgácsoló gyártócellák, gyártórendszerek 1.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
9- Fordító és kitárazó egységek (a műhely méretei alapján lehetséges az illesztés)
") Formmaksan szegező sor A gép által elfogadott tűréshatár a raklap alkotóelemeinek méreteire vonatkozóan megegyezik az UNI/EURO által előírtakkal. Gyártási kapacitás: EUR/EPAL típusú raklapra vonatkozó
Formmaksan szegező sor A gép által elfogadott tűréshatár a raklap alkotóelemeinek méreteire vonatkozóan megegyezik az UNI/EURO által előírtakkal. Gyártási kapacitás: EUR/EPAL típusú raklapra vonatkozó
1. Feladatok a dinamika tárgyköréből
 1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
1.6 Profilsínvezetések PM sorozat
 1.6 Profilsínvezetések PM sorozat 1.6.1 A profilsínvezetés különleges tulajdonságai PMN sorozat A HIWIN PMN sorozatú profilsínvezetése a bevált MGN sorozaton alapul. A műanyagcsatornában megvalósuló optimalizált
1.6 Profilsínvezetések PM sorozat 1.6.1 A profilsínvezetés különleges tulajdonságai PMN sorozat A HIWIN PMN sorozatú profilsínvezetése a bevált MGN sorozaton alapul. A műanyagcsatornában megvalósuló optimalizált
Traxx, Taurus mozdonyok és Flirt motorvonat. Kiss László. MÁV-START Zrt. Járműmenedzsment vezető
 Traxx, Taurus mozdonyok és Flirt motorvonat Kiss László MÁV-START Zrt. Járműmenedzsment vezető Áramszedő törés Az új típusú áramszedők közös jellemzői Nagysebességű üzemre alkalmasak, 160km/h vagy afelett
Traxx, Taurus mozdonyok és Flirt motorvonat Kiss László MÁV-START Zrt. Járműmenedzsment vezető Áramszedő törés Az új típusú áramszedők közös jellemzői Nagysebességű üzemre alkalmasak, 160km/h vagy afelett
PÉLDÁK ERŐTÖRVÉNYEKRE
 PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
Mérések állítható hajlásszögű lejtőn
 A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
Záróvizsga orientáló kérdések
 Szerszámgépek és ipari robotok (BMEGEGTMG02) Záróvizsga orientáló kérdések 2014-2015. tanév 2. félévtől Összeállította: Dr. Németh István, Tóth András, Püspöki János Az orientáló kérdések célja a záróvizsgán
Szerszámgépek és ipari robotok (BMEGEGTMG02) Záróvizsga orientáló kérdések 2014-2015. tanév 2. félévtől Összeállította: Dr. Németh István, Tóth András, Püspöki János Az orientáló kérdések célja a záróvizsgán
Szerkezeti elemek megfogása
 Szerkezeti elemek megfogása A gyártás, rakodás és szerelés közben szükségessé válik az elemek mozgatása. A nagyobb szerkezeti elemek esetében csak gépi mozgatás valósítható meg. Ekkor azonban szükség van
Szerkezeti elemek megfogása A gyártás, rakodás és szerelés közben szükségessé válik az elemek mozgatása. A nagyobb szerkezeti elemek esetében csak gépi mozgatás valósítható meg. Ekkor azonban szükség van
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS-
 A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
Járműelemek. Rugók. 1 / 27 Fólia
 Rugók 1 / 27 Fólia 1. Rugók funkciója A rugók a gépeknek és szerkezeteknek olyan különleges elemei, amelyek nagy (ill. korlátozott) alakváltozás létrehozására alkalmasak. Az alakváltozás, szemben más szerkezeti
Rugók 1 / 27 Fólia 1. Rugók funkciója A rugók a gépeknek és szerkezeteknek olyan különleges elemei, amelyek nagy (ill. korlátozott) alakváltozás létrehozására alkalmasak. Az alakváltozás, szemben más szerkezeti
PNEUMATIKA ALKALMAZÁSA A GÉPGYÁRTÁSBAN ÉS A GYÁRTÁSAUTOMATIZÁLÁSBAN Készüléktervezés - Szerelés
 PNEUMATIKA ALKALMAZÁSA A GÉPGYÁRTÁSBAN ÉS A GYÁRTÁSAUTOMATIZÁLÁSBAN Készüléktervezés - Szerelés Oktatási segédanyag 2009. Dr. Alpek Ferenc okl. gépész- és okl. villamosmérnök tud. főmunkatárs, honorary
PNEUMATIKA ALKALMAZÁSA A GÉPGYÁRTÁSBAN ÉS A GYÁRTÁSAUTOMATIZÁLÁSBAN Készüléktervezés - Szerelés Oktatási segédanyag 2009. Dr. Alpek Ferenc okl. gépész- és okl. villamosmérnök tud. főmunkatárs, honorary
Meghatározás Előnyök Hátrányok Hajtóláncok típusai Lánchajtás elrendezése Poligonhatás Méretezés Lánc kenése. Tartalomjegyzék
 Lánchajtások Meghatározás Előnyök Hátrányok Hajtóláncok típusai Lánchajtás elrendezése Poligonhatás Méretezés Lánc kenése Tartalomjegyzék Meghatározás Olyan kényszerhajtás (alakzáró hajtás), ahol a teljesítményátvitel
Lánchajtások Meghatározás Előnyök Hátrányok Hajtóláncok típusai Lánchajtás elrendezése Poligonhatás Méretezés Lánc kenése Tartalomjegyzék Meghatározás Olyan kényszerhajtás (alakzáró hajtás), ahol a teljesítményátvitel
Szerszámgépek 1. előadás 2007. Február 13. Szerszámg. 1. előad. Miskolc - Egyetemváros 2006/2007 2.félév
 Szerszámg mgépek 1. előad adás Miskolc - Egyetemváros 2006/2007 2.félév 1 A Szerszámg mgépek Tanszékének nek rövid r bemutatása A Gépészmérnöki és Informatikai Kar meghatározó szaktanszéke, jelentős ipari
Szerszámg mgépek 1. előad adás Miskolc - Egyetemváros 2006/2007 2.félév 1 A Szerszámg mgépek Tanszékének nek rövid r bemutatása A Gépészmérnöki és Informatikai Kar meghatározó szaktanszéke, jelentős ipari
Elméleti forgatónyomaték
 1 00131807 Üzemi nyomás min/max 4 bar / 8 bar Környezeti hőmérséklet min./max. +5 C / +60 C Közeghőmérséklet min./max. +5 C / +60 C Közeg Sűrített levegő Részecskeméret max. 5 µm A sűrített levegő olajtartalma
1 00131807 Üzemi nyomás min/max 4 bar / 8 bar Környezeti hőmérséklet min./max. +5 C / +60 C Közeghőmérséklet min./max. +5 C / +60 C Közeg Sűrített levegő Részecskeméret max. 5 µm A sűrített levegő olajtartalma
Az elliptikus hengerre írt csavarvonalról
 1 Az elliptikus hengerre írt csavarvonalról Erről viszonylag ritkán olvashatunk, ezért most erről lesz szó. Az [ 1 ] munkában találtuk az alábbi részt 1. ábra. 1. ábra Itt a ( c ) feladat és annak megoldása
1 Az elliptikus hengerre írt csavarvonalról Erről viszonylag ritkán olvashatunk, ezért most erről lesz szó. Az [ 1 ] munkában találtuk az alábbi részt 1. ábra. 1. ábra Itt a ( c ) feladat és annak megoldása
ÁGAZATI SZAKMAI ÉRETTSÉGI VIZSGA GÉPÉSZET ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK
 GÉPÉSZET ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK 1. tétel A. Ismertesse az anyagok tűzveszélyességi, valamint az építmények kockázati osztályba sorolását! B. Ismertesse a szerelési
GÉPÉSZET ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK 1. tétel A. Ismertesse az anyagok tűzveszélyességi, valamint az építmények kockázati osztályba sorolását! B. Ismertesse a szerelési
motor teljesítménye 12\15 kw orsó kúp BT 40 Fanuc 2000 R-2000iA 165F Gyártási év: 2007
 MITSUI S. HU40A Gyártó cella FMS (3db alapgép + 1db robot + 60db AROVA paletta) Asztalméret 400 x 400 mm orsó fordulat 60-1200 1/min. motor teljesítménye 12\15 kw orsó kúp BT 40 Asztal poz.: 0,001 (folyamatos)
MITSUI S. HU40A Gyártó cella FMS (3db alapgép + 1db robot + 60db AROVA paletta) Asztalméret 400 x 400 mm orsó fordulat 60-1200 1/min. motor teljesítménye 12\15 kw orsó kúp BT 40 Asztal poz.: 0,001 (folyamatos)
Acélszerkezetek. 3. előadás 2012.02.24.
 Acélszerkezetek 3. előadás 2012.02.24. Kapcsolatok méretezése Kapcsolatok típusai Mechanikus kapcsolatok: Szegecsek Csavarok Csapok Hegesztett kapcsolatok Tompavarrat Sarokvarrat Coalbrookdale, 1781 Eiffel
Acélszerkezetek 3. előadás 2012.02.24. Kapcsolatok méretezése Kapcsolatok típusai Mechanikus kapcsolatok: Szegecsek Csavarok Csapok Hegesztett kapcsolatok Tompavarrat Sarokvarrat Coalbrookdale, 1781 Eiffel
Elektronikus közelítéskapcsolók
 Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Emelési segédszerkezetek
 Emelési segédszerkezetek Emelési segédszerkezetnek hívunk minden olyan ideiglenesen igénybevett berendezést, amely az elemek megfogására, megforgatására, az emelés közbeni többlet igénybevételek felvételére,
Emelési segédszerkezetek Emelési segédszerkezetnek hívunk minden olyan ideiglenesen igénybevett berendezést, amely az elemek megfogására, megforgatására, az emelés közbeni többlet igénybevételek felvételére,