FANUC Robottípusok, alkalmazások. Anyagmozgatás, szerelés, stb. Festés, lakkozás. Hegesztés
|
|
|
- Róbert Kiss
- 9 évvel ezelőtt
- Látták:
Átírás
1 FANUC Ipari Robotok

2 FANUC Robottípusok, alkalmazások Festés, lakkozás Anyagmozgatás, szerelés, stb. Hegesztés

3 Festő robotcellák A festő cellák sajátosságai általában: Speciális robbanásbiztos cella elszívással Festékadagoló és keverő rendszer Speciális pálya A festőrobotok sajátosságai: Robbanásbiztos kar és TP kialakítás Kis terhelhetőség/nagy kinyúlás Nagy mozgástartományú tengely kábel átvezetéssel (holow shaft) Speciális festési beállítások
 Speciális")
4 Hegesztő robotcellák A hegesztő cellák sajátosságai általában: A hegesztés típusának megfelelő fej és segédberendezések Nem gyúlékony alkatrészek Speciális ülékek, asztalok A hegesztőrobotok sajátosságai általában: Univerzális csatolófelület hegesztő automatákhoz Speciális hegesztési beállítások (varrattípusoknak megfelelő mozgás, stb)

5 Anyagmozgató (pick and place ) robotcellák Az anyagmozgató cellák sajátosságai: Mindig termékspecifikus cellakialakítás Nagy változatosság Az anyagmozgatáshoz használt robotok: Univerzális robotkarok Egyedi robotfejek a termékekhez tervezve

6 10 February 2010 Néhány példa...

7 10 February 2010 Néhány példa...

8 10 February 2010 Néhány példa...

9 10 February 2010 Néhány példa...

10 10 February 2010 Néhány példa...

11 10 February 2010 Néhány példa...

12 10 February 2010 Néhány példa...

13 10 February 2010 Néhány példa...

14 A robotok fő műszaki parméterei A robotcella fő elemei: Robotkar fejegységgel, állvánnyal, vezérlőegység Biztonsági elkerítés Munkadarab beadagolást végző eszköz (adagoló, pálya, szállítószalag, stb) Munkadarab pozícionálást végző eszköz vagy kamera rendszer Cella vezérlés és HMI 10 February 2010

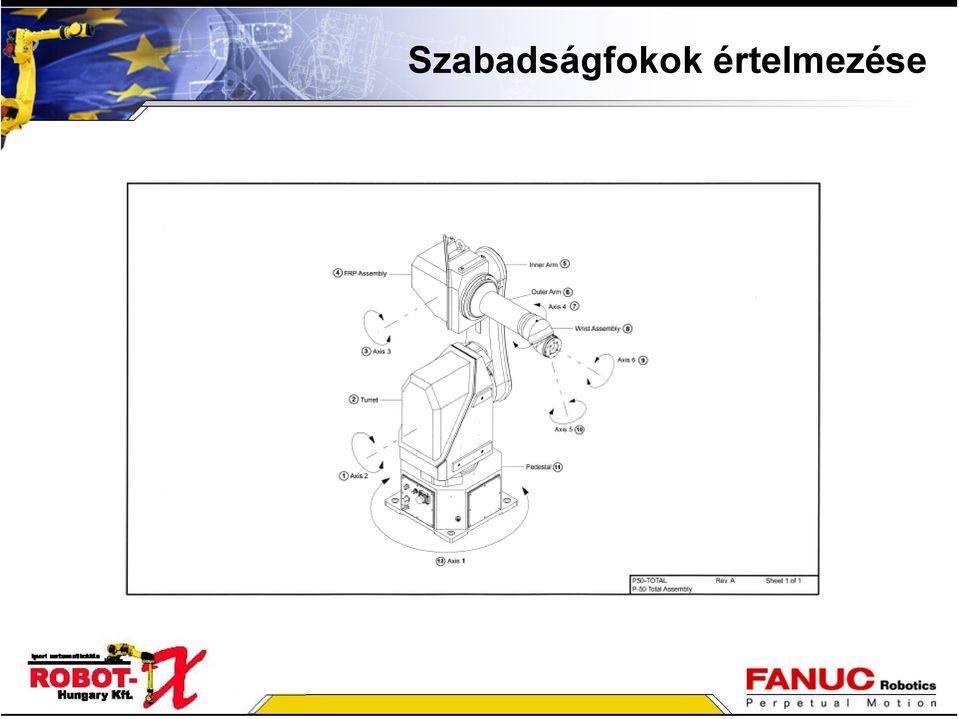
15 A robotok fő műszaki paraméterei Szabadsági fok: 2-6 Max. hasznos terhelhetőség: kg Megfogóval elérhető tart.: mm Ismétlési pontoság: 0,02-0,5 mm Max. sebesség: mm/s Mozgástér: Egyedi 3D forma Súly: kg

16 Szabadságfokok értelmezése
17 Ismétlési pontosság A specifikációban az ismétlési pontosság szerepel Az ismétlési pontosság csak változatlan körülmények között garantált az előírtnak megfelelő terhelés esetén

18 Terhelhetőség A robot fejet úgy kell megtervezni, hogy a specifikációban megadottnál nagyobb erő illetve nyomaték ne érje a robotot.

19 Munkatér 1

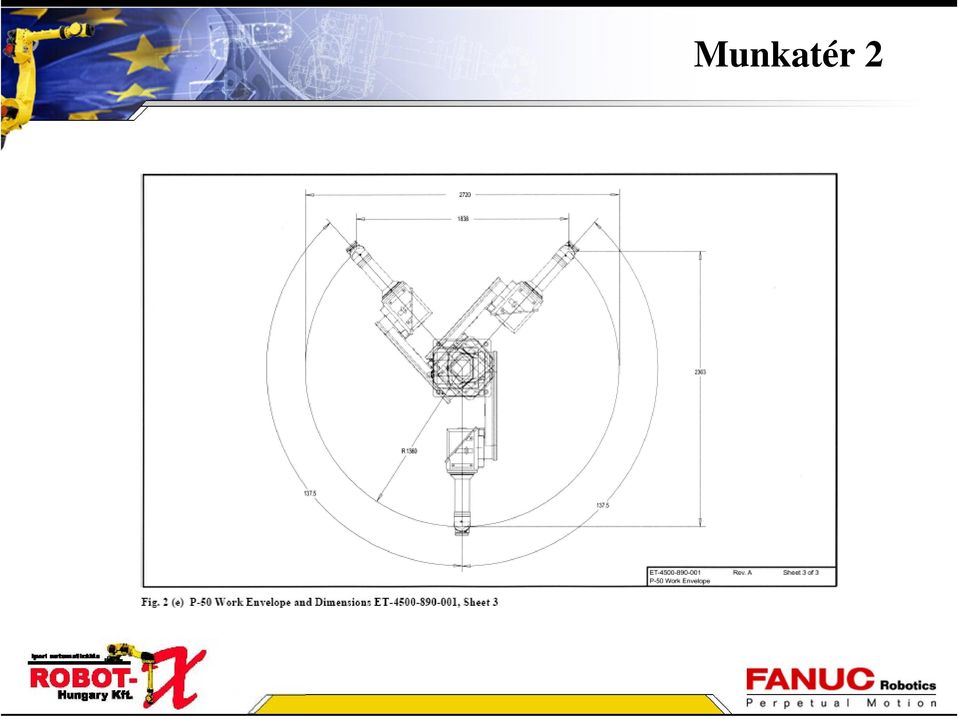
20 Munkatér 2
21 Felépítés 1
22 Felépítés 2
23 Felépítés 3 Speciális motor és hajtómű Motoron átvezetett kábelezés
24 Hullámhajtómű Kis súly és méret Nagy áttétel egy fokozatban Kotyogásmentes
25 Robot technológia precíziós RV-hajtómű FANUC Jeladó 64k or 128k Impulzus/ fordulat FANUC Robot Controller FANUC Robot R-2000i FANUC Intelligent Teach Pendant FANUC Robot Control Unit FANUC 6 tengelyes szervo erősítő FANUC szervo motor jeladóval és fékkel
26 A robot vezérlése
27 Működtetés
28 Teaching pendant ¾ ¾ ¾ Mozgatás alappozícióba állításkor hiba után, pozíciófelvételhez és karbantartáshoz Programozás Beállítások megváltoztatása
29 Kézi mozgatás 1 Szükséges előkészületek Terület biztosítása Kézi üzem a vezérlőn Bekapcsolt teacing pendant Sebesség beállítás Koordináta rendszer beállítás
30 Kézi mozgatás 2 Deadmen switch + Shift nyomva tartása Reset gomb megnyomása Kívánt irány gomb megnyomása Deadman switch
31 Koordináta rendszerek 1 World frame Világ koordináta rendszer Robothoz rögzített Állandó Derékszögű
32 Koordináta rendszerek 2 Joint tengelyenkénti mozgatás Robothoz rögzített Állandó A tengelyek egyenként mozognak, nincs interpoláció
33 Koordináta rendszerek 3 Tool frame eszköz koordináta rendszer Robot fejhezhez rögzített Mozgó Derékszögű
34 Koordináta rendszerek 4 User frame felhasználói koordináta rendszer Rögzített és állandó Derékszögű Felhasználó által definiált Áthelyezi a robot null pontját Jog frame felhasználói koordináta rendszer Rögzített és állandó Derékszögű Felhasználó által definiált Nem módosítja a robot null pontját
35 Kézi program tesztelés, futtatás 1 Program kiválasztás Bekapcsolt TP Select Nyilak Enter
36 Kézi program tesztelés, futtatás 2 Kiválasztott program név A kiválasztott program állapota Aktuális sebesség Szerkesztett program név Program utasítások Alapvető információk
37 Kézi program tesztelés, futtatás 1 Joint - Tengelyenkénti Linear - Egyenes Circular - Kör Interpoláció típusok
38 Kézi program tesztelés, futtatás 2 Interpoláció Cél pozíció Sebesség Megállás Mozgatási utasítás
39 Kézi program tesztelés, futtatás 3 Pozíció módosítás Program vagy pozíció módosítás előtt mentés Figyelembe véve a programban használt koordináta rendszert Változtatás után kézi tesztelés
40 Kézi program tesztelés, futtatás 4 Kézi program futtatás A terület biztosítása után Lépésenkénti üzemmódban Kis sebesség mellett A kézi mozgatási feltételek + FWD előre gomb
41 Egyéb fontos gombok, funkciók Menü Edit - Szerkeztés Data - Adatok FCTN - funkciók Hold program stop POSN - pozíciók Prev Előző lap Next Következő lap F1 F5 - funkció gombok I/O-k
42 Fő menü Teljes fő menü Gyors fő menü
43 Funkció menü Funkció menü
44 Legfontosabb menük 1 Alarm - Hiba menü Látható az összes aktuális hiba hibakóddal Megjeleníthetőek a múltbeli hiba feljegyzések (100 hibáig visszamenőleg) Törölhetőek a hibák
45 Legfontosabb menük 2 I/O menü Megfigyelhetőek és részben szimulálhatóak a bejövő jelek Megjeleníthetőek és kapcsolhatóak (kivéve rendszerjelek) a kimeneti jelek Több I/O típus kezelhető (Robot I/O, Digital I/O, Analoge I/O, Group I/O, stb.) Beállítható az egész I/O rendszer kiosztás
46 Legfontosabb menük 3 Setup - Beállítás menü Beállíthatóak a festési, pisztoly és darabkezelési mód paraméterek Beállíthatóak a nem alkalmazás (festés) -specifikus paraméterek pl: Koordináta rendszerek, Referenciapontok, biztonsági terek, felhasználói hibaüzenetek, stb.
47 Legfontosabb menük 3 Status menü Megtekinthetőek a szoftver elemek pl: installált programok, opciók, verziószámok, stb Megtekinthető a hardver elemek állapota pl: enkóder értékek, aktuális/minimális/maximális terhelés várható hátralévő élettartam, ütközések száma, stb.
48 Globális Robot Felhasználás A világon 2005-been telepített robotok területi eloszlása Asia , 38% Europe, , 22% Japan; ; 28% USA; ; 9% 10 February 2010
49 Global Robot Usage A világon 2005-been telepített robotok iparágankénti eloszlása Investment goods i.; 22074; 40% Consumer goods i.; 2274; 4% Basic metals & materials i. ; 587; 1% Automotive industry; 30153; 55% 10 February 2010
50 Gyors fejlődés Teljesítmény növekedés (tipikus hegesztő robot) Árcsökkenés FANUC S-360 (1983) Payload = 60kg; Reach=2.23 m FANUC S-420F (1987) Payload = 120kg; Reach=2.40 m FANUC M-900iA/600 (2004) Payload = max. 700kg; Reach=2.83 m Átlagos robot ár Euro Átlagos robot ár Euro Átlagos robot ár Euro 20 év alatt: - 50% 10 February 2010
SZÉCHENYI ISTVÁN EGYETEM GYŐR. Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán Robotcella A robotcella fő elemei: Robot Robot fejegység (effektor), Több fej esetén tartóállvány Biztonsági elkerítés
SZÉCHENYI ISTVÁN EGYETEM GYŐR Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán Robotcella A robotcella fő elemei: Robot Robot fejegység (effektor), Több fej esetén tartóállvány Biztonsági elkerítés
Cella létrehozása. A roboguide programot elindítva az 1.ábra szerinti bejelentkező ablakot kapjuk.
 Roboguide kézikönyv Cella létrehozása A roboguide programot elindítva az 1.ábra szerinti bejelentkező ablakot kapjuk. 1. ábra 1. Új cella létrehozásához kattintson a Start New Cell-re. 2. Adja meg a cella
Roboguide kézikönyv Cella létrehozása A roboguide programot elindítva az 1.ábra szerinti bejelentkező ablakot kapjuk. 1. ábra 1. Új cella létrehozásához kattintson a Start New Cell-re. 2. Adja meg a cella
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
Kezelési utasítás SITRANS F M MAG 8000 & MAG 8000 CT 02/2010. SITRANS F M MAG8000 és MAG8000 CT elektromágneses áramlásmérő típusok
 Kezelési utasítás 02/2010 SITRANS F M MAG 8000 & MAG 8000 CT SITRANS F M MAG8000 és MAG8000 CT elektromágneses áramlásmérő típusok 2 Általános utasítások Az üzembe helyezés során figyelembe kell venni
Kezelési utasítás 02/2010 SITRANS F M MAG 8000 & MAG 8000 CT SITRANS F M MAG8000 és MAG8000 CT elektromágneses áramlásmérő típusok 2 Általános utasítások Az üzembe helyezés során figyelembe kell venni
Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
 A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
FANUC Robotics Roboguide
 FANUC Robotics Roboguide 2010. február 9. Mi Mi az az a ROBOGUIDE Robot rendszer animációs eszköz ROBOGUIDE is an off-line eszköz a robot rendszer beállításához és karbantartásához ROBOGUIDE is an on-line
FANUC Robotics Roboguide 2010. február 9. Mi Mi az az a ROBOGUIDE Robot rendszer animációs eszköz ROBOGUIDE is an off-line eszköz a robot rendszer beállításához és karbantartásához ROBOGUIDE is an on-line
670 milliszekundumos csomagolási ciklusidő
 670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
Útmutató EDC kézivezérlőhöz
 Útmutató EDC kézivezérlőhöz ALAPFUNKCIÓK A kézivezérlő használata során állítsa az EDC vezérlő előlapján található forgó kapcsolót 0 állásba. Ezáltal a felhasználó a kézivezérlő segítségével férhet hozzá,
Útmutató EDC kézivezérlőhöz ALAPFUNKCIÓK A kézivezérlő használata során állítsa az EDC vezérlő előlapján található forgó kapcsolót 0 állásba. Ezáltal a felhasználó a kézivezérlő segítségével férhet hozzá,
Hegesztőrobot rendszerek biztonságtechnikája
 Hegesztőrobot rendszerek biztonságtechnikája Dipl. Ing. Zsolt, GYŐRVÁRY Application engineer Flexman Robotics Kft. Europe 1 A hegesztő robotrendszerekre vonatkozó biztonsági előírások csoportosítása 2
Hegesztőrobot rendszerek biztonságtechnikája Dipl. Ing. Zsolt, GYŐRVÁRY Application engineer Flexman Robotics Kft. Europe 1 A hegesztő robotrendszerekre vonatkozó biztonsági előírások csoportosítása 2
ABB Robotika oktatási katalógus Képzési kínálat
 ABB Robotika oktatási katalógus Képzési kínálat ABB Kft. Kassák Lajos utca 19-25. 1134, Budapest Telefon: +36 1 4432168 Fax: +36 1 4432211 http://new.abb.com/products/robotics/hu robotszerviz@hu.abb.com
ABB Robotika oktatási katalógus Képzési kínálat ABB Kft. Kassák Lajos utca 19-25. 1134, Budapest Telefon: +36 1 4432168 Fax: +36 1 4432211 http://new.abb.com/products/robotics/hu robotszerviz@hu.abb.com
Az Ön Somfy megoldása. Függönymozgatás egyszerűen. Kényelemre. tervezve
 Az Ön Somfy megoldása Függönymozgatás egyszerűen Kényelemre tervezve Függöny akasztó Normál és nagy igénybevételű kocsikhoz Glydea TM 35 húzókocsi SOMFY INNOVÁCIÓ Kocsi hullámos függönyhöz Nagy igénybevételű
Az Ön Somfy megoldása Függönymozgatás egyszerűen Kényelemre tervezve Függöny akasztó Normál és nagy igénybevételű kocsikhoz Glydea TM 35 húzókocsi SOMFY INNOVÁCIÓ Kocsi hullámos függönyhöz Nagy igénybevételű
6. Robotok és manipulátorok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
Termék kézikönyv 2013. Comfort. Command Parancsadók 18. Comfort. Command. Comfort. Command. Meghajtórendszerek garázskapukhoz Vezető sínek Tartozékok
 Termék kézikönyv Garázskapumeghajtások Újdonságok 2013 Termék kézikönyv 2013.. Meghajtórendszerek garázskapukhoz Vezető sínek Tartozékok 3 10 14 Parancsadók 18 Érvényes 2013. januártól 2 Érvényes 2013.
Termék kézikönyv Garázskapumeghajtások Újdonságok 2013 Termék kézikönyv 2013.. Meghajtórendszerek garázskapukhoz Vezető sínek Tartozékok 3 10 14 Parancsadók 18 Érvényes 2013. januártól 2 Érvényes 2013.
280 YTO 135 TÍPUS YTO 135 TYPE. Rendelési cikkszám felépítése Order code structure. Kihajtó tengely pozíciók Drive shaft positions
 YTO 135 TÍPUS YTO 135 TYPE Rendelési cikkszám felépítése Order code structure Típus / Type YTO135-500 - 4P D01 - P 3 Lökethossz / Stroke Lineáris kocsik szám / Block quantity Kihajtó tengely pozíció /
YTO 135 TÍPUS YTO 135 TYPE Rendelési cikkszám felépítése Order code structure Típus / Type YTO135-500 - 4P D01 - P 3 Lökethossz / Stroke Lineáris kocsik szám / Block quantity Kihajtó tengely pozíció /
Multifunkciós digitális termosztát TER-6
 78-0-00 Rev.: Multifunkciós digitális termosztát Köszönjük, hogy termékünket választotta. mennyiben segítségre van szüksége hívja telefonszámunkat munkaidõben. Tartalom oldal. Mielõtt elkezdené.... z eszköz
78-0-00 Rev.: Multifunkciós digitális termosztát Köszönjük, hogy termékünket választotta. mennyiben segítségre van szüksége hívja telefonszámunkat munkaidõben. Tartalom oldal. Mielõtt elkezdené.... z eszköz
motor teljesítménye 12\15 kw orsó kúp BT 40 Fanuc 2000 R-2000iA 165F Gyártási év: 2007
 MITSUI S. HU40A Gyártó cella FMS (3db alapgép + 1db robot + 60db AROVA paletta) Asztalméret 400 x 400 mm orsó fordulat 60-1200 1/min. motor teljesítménye 12\15 kw orsó kúp BT 40 Asztal poz.: 0,001 (folyamatos)
MITSUI S. HU40A Gyártó cella FMS (3db alapgép + 1db robot + 60db AROVA paletta) Asztalméret 400 x 400 mm orsó fordulat 60-1200 1/min. motor teljesítménye 12\15 kw orsó kúp BT 40 Asztal poz.: 0,001 (folyamatos)
HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL
 HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL Balog Viktor, Szolnok, 2018 AZ ELŐADÁS TARTALMA Cég bemutatása A hegesztés automatizálás fontossága A hegesztés automatizálás (célgépes és robotos alkalmazások)
HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL Balog Viktor, Szolnok, 2018 AZ ELŐADÁS TARTALMA Cég bemutatása A hegesztés automatizálás fontossága A hegesztés automatizálás (célgépes és robotos alkalmazások)
DENER Plazmavágók. Típus: Mitsubishi DNR-I 1530 CNC. Dener plazmavágás. Dener plazmavágók. http://www.dener.com/sayfa/89/plasma-cutting.
 DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
S2302RF vezeték nélküli programozható digitális szobatermosztát
 vezeték nélküli programozható digitális szobatermosztát Termékjellemzők: 3. 4. 5. 6. 7. 8. 9. 10. 1 1 Programozhatóság: 7 napos előre programozhatóság Kijelezhető hőmérséklet tartomány 0 C~40 C (0.1 C-os
vezeték nélküli programozható digitális szobatermosztát Termékjellemzők: 3. 4. 5. 6. 7. 8. 9. 10. 1 1 Programozhatóság: 7 napos előre programozhatóság Kijelezhető hőmérséklet tartomány 0 C~40 C (0.1 C-os
SpinoWraptor Trans. Forgókorong és görgősor
 SpinoWraptor Trans Forgókorong és görgősor Forgókorong átmérő 1650mm Raklap 1200x1000 Max terhelhetőség 2000kg Alapterület hossza 2700mm Alapterület szélessége 1650mm Alapterület felső magassága 180mm
SpinoWraptor Trans Forgókorong és görgősor Forgókorong átmérő 1650mm Raklap 1200x1000 Max terhelhetőség 2000kg Alapterület hossza 2700mm Alapterület szélessége 1650mm Alapterület felső magassága 180mm
S2302 programozható digitális szobatermosztát
 programozható digitális szobatermosztát Termékjellemzők: 3. 4. 5. 6. 7. 8. 9. 10. Programozhatóság: 7 napos előre programozhatóság Kijelezhető hőmérséklet tartomány 0 C~40 C (0.1 C-os lépésekben) Hőmérséklet
programozható digitális szobatermosztát Termékjellemzők: 3. 4. 5. 6. 7. 8. 9. 10. Programozhatóság: 7 napos előre programozhatóság Kijelezhető hőmérséklet tartomány 0 C~40 C (0.1 C-os lépésekben) Hőmérséklet
ABB Teach Pendant programozás segédlet
 ABB Teach Pendant programozás segédlet Készítette: Gyöngyösi Balázs Kiadja a Robert Bosch Mechatronikai Intézeti Tanszék Miskolc, 2017. Tartalomjegyzék Tartalomjegyzék... 1 1. Teach Pendant és az érintőképernyő
ABB Teach Pendant programozás segédlet Készítette: Gyöngyösi Balázs Kiadja a Robert Bosch Mechatronikai Intézeti Tanszék Miskolc, 2017. Tartalomjegyzék Tartalomjegyzék... 1 1. Teach Pendant és az érintőképernyő
Valena Life/ Valena Allure , , , ,
 Valena Life/ Valena Allure 7 521 35, 7 522 35, 7 523 35, 7 555 38, 7 555 39 EN LE08584AA EN - 2 LE08584AA_EN_print_p3.pdf 1 2015.09.07. 9:32 EN - 3 EN - 4 Valena Life/ Valena Allure 7 521 35, 7 522 35,
Valena Life/ Valena Allure 7 521 35, 7 522 35, 7 523 35, 7 555 38, 7 555 39 EN LE08584AA EN - 2 LE08584AA_EN_print_p3.pdf 1 2015.09.07. 9:32 EN - 3 EN - 4 Valena Life/ Valena Allure 7 521 35, 7 522 35,
C2RF Többzónás programozható vezeték nélküli digitális szobatermosztát
 Többzónás programozható vezeték nélküli digitális szobatermosztát Termékjellemzők: 3. 4. 5. 6. 7. 8. 9. 10. 1 Kijelezhető hőmérséklet tartomány: 0 C - 40 C (0,1 C lépésekben) Hőmérséklet állítási tartomány:
Többzónás programozható vezeték nélküli digitális szobatermosztát Termékjellemzők: 3. 4. 5. 6. 7. 8. 9. 10. 1 Kijelezhető hőmérséklet tartomány: 0 C - 40 C (0,1 C lépésekben) Hőmérséklet állítási tartomány:
KUKA_Az Ön partnere a robotalapú automatizálásban. S&T Focus 2018_Okos gyár Rumpler Ádám
 KUKA_Az Ön partnere a robotalapú automatizálásban Seite: 1 Cégbemutató A robotok revolúciója Standard robotmodellek Kollaboratív robotok Ipar 4.0 Mátrix gyártás KUKA szimuláció Seite: 2 120 éves szakmai
KUKA_Az Ön partnere a robotalapú automatizálásban Seite: 1 Cégbemutató A robotok revolúciója Standard robotmodellek Kollaboratív robotok Ipar 4.0 Mátrix gyártás KUKA szimuláció Seite: 2 120 éves szakmai
2-VEZETÉKES KAPUTELEFON RENDSZER. Kiegészítő egység VDT SC6V. VDT-SC6V Leírás v1.0.pdf
 2-VEZETÉKES KAPUTELEFON RENDSZER Kiegészítő egység VDT SC6V VDT-SC6V Leírás v1.0.pdf Tartalom 1 Ismertető... 3 2 Kaputábla leírása... 3 3 Rögzítés... 4 4 Kábelezési rajz... 4 5 Konfiguráció... 5 5.1 A
2-VEZETÉKES KAPUTELEFON RENDSZER Kiegészítő egység VDT SC6V VDT-SC6V Leírás v1.0.pdf Tartalom 1 Ismertető... 3 2 Kaputábla leírása... 3 3 Rögzítés... 4 4 Kábelezési rajz... 4 5 Konfiguráció... 5 5.1 A
CNC Robot Robomachine. M-2iA
 CNC Robot Robomachine M-2iA M-2iA/3S M-2iA/3SL Tartalom Bevezetés... 03 Főbb jellemzők... 04 Műszaki adatok... 05 Csuklóterhelési diagram Normál tehetetlenségű üzemmód... 06 Opció: nagy tehetetlenségű
CNC Robot Robomachine M-2iA M-2iA/3S M-2iA/3SL Tartalom Bevezetés... 03 Főbb jellemzők... 04 Műszaki adatok... 05 Csuklóterhelési diagram Normál tehetetlenségű üzemmód... 06 Opció: nagy tehetetlenségű
Gildemeister-Bielefeld NEF-480 80.1222.06229
 EXCEL CSEPEL SZERSZÁMGÉPGYÁRTÓ KFT + 3 6-1/ 27 8 5 80 0, 2 78 58 03 + 3 6-1/ 42 5 7 60 5 WEB: w ww. e xce l -cse pel. hu E- M ail: sale s@e xcel -cse pe l. hu Gildemeister-Bielefeld NEF-480 80.1222.06229
EXCEL CSEPEL SZERSZÁMGÉPGYÁRTÓ KFT + 3 6-1/ 27 8 5 80 0, 2 78 58 03 + 3 6-1/ 42 5 7 60 5 WEB: w ww. e xce l -cse pel. hu E- M ail: sale s@e xcel -cse pe l. hu Gildemeister-Bielefeld NEF-480 80.1222.06229
TM-73733 Szervó vezérlő és dekóder
 TM-73733 Szervó vezérlő és dekóder Használati útmutató 2011 BioDigit Ltd. Minden jog fenntartva. A dokumentum sokszorosítása, tartalmának közzététele bármilyen formában, beleértve az elektronikai és mechanikai
TM-73733 Szervó vezérlő és dekóder Használati útmutató 2011 BioDigit Ltd. Minden jog fenntartva. A dokumentum sokszorosítása, tartalmának közzététele bármilyen formában, beleértve az elektronikai és mechanikai
Kezelési leírás. Portos motor DELUX-R
 Kezelési leírás Portos motor DELUX-R 1 Tartalomjegyzék Elektromos bekötés Végállás pozíciók beállítása Távirányító egységek hozzáadása/törlése Közbenső pozíciók programozása Végállás pozíciók szerkesztése
Kezelési leírás Portos motor DELUX-R 1 Tartalomjegyzék Elektromos bekötés Végállás pozíciók beállítása Távirányító egységek hozzáadása/törlése Közbenső pozíciók programozása Végállás pozíciók szerkesztése
TERMÉKISMERTETŐ. NCT KFT BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: , CÉGJEGYZÉKSZÁM:
 www.nct.hu Tárgy: NCT KFT. 1148 BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: 12158791-2-42, CÉGJEGYZÉKSZÁM: nct@nct.hu 01-09-560655, EU. ADÓSZÁM: HU 121 58 791, TEL +36 1 46 76 300, FAX +36 1 46 76 309 EUMACH FBE
www.nct.hu Tárgy: NCT KFT. 1148 BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: 12158791-2-42, CÉGJEGYZÉKSZÁM: nct@nct.hu 01-09-560655, EU. ADÓSZÁM: HU 121 58 791, TEL +36 1 46 76 300, FAX +36 1 46 76 309 EUMACH FBE
Motorvezérlők. MC BS2 Cikkszám: Motorvezérlők. BUS motorvezérlő két darab árnyékoló egyedi vezérléséhez
 BS2 Cikkszám: 01078020 BUS motorvezérlő két darab árnyékoló egyedi vezérléséhez Mikroprocesszor vezérlet BUS motorvezérlő két darab Két darab 230 V-os Egy programozható csoport és két darab egyedi kapcsoló
BS2 Cikkszám: 01078020 BUS motorvezérlő két darab árnyékoló egyedi vezérléséhez Mikroprocesszor vezérlet BUS motorvezérlő két darab Két darab 230 V-os Egy programozható csoport és két darab egyedi kapcsoló
TELCOMA ROCK Modellek és jellemzők Technikai adatok Mértékegység ROCK ROCK V ROCK 230
 TELCOMA ROCK Modellek és jellemzők Önzáró elektromechanikus motor. Motor áramellátása 24 V DC. Működés garantálva 115 fokig. Nagyobb nyitási szögre használja a speciális kiegészítő alkatrészeket a felszerelésnél.
TELCOMA ROCK Modellek és jellemzők Önzáró elektromechanikus motor. Motor áramellátása 24 V DC. Működés garantálva 115 fokig. Nagyobb nyitási szögre használja a speciális kiegészítő alkatrészeket a felszerelésnél.
SMARTWINCH csörlőgép baromfitartáshoz
 SMARTWINCH csörlőgép baromfitartáshoz Kezelési utasítás és műszaki tájékoztató Verzió : 01/hun POULTRY-TECH Kereskedelmi és Szolgáltató Kft. H-2943 Bábolna, Pf.: 37. Tel. 06 20 388 5550, 5543 Tel. 06 96
SMARTWINCH csörlőgép baromfitartáshoz Kezelési utasítás és műszaki tájékoztató Verzió : 01/hun POULTRY-TECH Kereskedelmi és Szolgáltató Kft. H-2943 Bábolna, Pf.: 37. Tel. 06 20 388 5550, 5543 Tel. 06 96
Pozicionáló rendszerek Lineáris tengelyek KK sorozat
 3. 3.. KK lineáris modulok tulajdonságai HIWIN KK lineáris modulok kompakt pozicionáló tengelyek. z előtolást egy golyós menetes orsós hajtás biztosítja, amely a motor kész meghajtó-karimába kerül tárolásra.
3. 3.. KK lineáris modulok tulajdonságai HIWIN KK lineáris modulok kompakt pozicionáló tengelyek. z előtolást egy golyós menetes orsós hajtás biztosítja, amely a motor kész meghajtó-karimába kerül tárolásra.
Felhasználói és Telepítői Kézikönyv AT 7070 Elektronikus vezérlő garázskapukhoz
 ELETTRONIC DIVISION Felhasználói és Telepítői Kézikönyv AT 7070 Elektronikus vezérlő garázskapukhoz ALAPRAJZ RF CODE CLOSE OPEN PROG 1 2 3 4 ON 5 6 7 8 POWER 1 2 3 4 SLOW SPEED + TR1 + TR2 10 5 6 7 8 9
ELETTRONIC DIVISION Felhasználói és Telepítői Kézikönyv AT 7070 Elektronikus vezérlő garázskapukhoz ALAPRAJZ RF CODE CLOSE OPEN PROG 1 2 3 4 ON 5 6 7 8 POWER 1 2 3 4 SLOW SPEED + TR1 + TR2 10 5 6 7 8 9
BOB Használati és üzembe helyezési utasítás
 1 BENINCÁ BOB Használati és üzembe helyezési utasítás 2 Köszönjük, hogy az általunk forgalmazott, Benincá BOB típusú szettet választotta. A Benincá cég kínálatában található összes termék 20 éves gyártási
1 BENINCÁ BOB Használati és üzembe helyezési utasítás 2 Köszönjük, hogy az általunk forgalmazott, Benincá BOB típusú szettet választotta. A Benincá cég kínálatában található összes termék 20 éves gyártási
AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV
 Adatlap Szelepmozgató motorok három-pont szabályozáshoz AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV 33 - DIN EN 14597 bizonyítvánnyal rendelkező biztonsági funkció (záró rugó) Leírás AMV 10 AMV 13 AMV 20,
Adatlap Szelepmozgató motorok három-pont szabályozáshoz AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV 33 - DIN EN 14597 bizonyítvánnyal rendelkező biztonsági funkció (záró rugó) Leírás AMV 10 AMV 13 AMV 20,
TM-73726 Szervó vezérlő
 TM-73726 Szervó vezérlő Használati útmutató 2011 BioDigit Ltd. Minden jog fenntartva. A dokumentum sokszorosítása, tartalmának közzététele bármilyen formában, beleértve az elektronikai és mechanikai kivitelezést
TM-73726 Szervó vezérlő Használati útmutató 2011 BioDigit Ltd. Minden jog fenntartva. A dokumentum sokszorosítása, tartalmának közzététele bármilyen formában, beleértve az elektronikai és mechanikai kivitelezést
VisualNastran4D. kinematikai vizsgálata, szimuláció
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
Idő és nap beállítás
 Kézikönyv UTH-20A Idő és nap beállítás Jelen idő beállítás : Nyomja meg az 'hour' és a 'min' gombot egy időben, a nap és jelen idő villogni kezd a kijelző alján. Az óra megváltoztatásához használjuk az
Kézikönyv UTH-20A Idő és nap beállítás Jelen idő beállítás : Nyomja meg az 'hour' és a 'min' gombot egy időben, a nap és jelen idő villogni kezd a kijelző alján. Az óra megváltoztatásához használjuk az
Forgácsoló gyártócellák, gyártórendszerek 1.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
LP3 vezérlőegység MINIGAZ Evolution hőlégfúvókhoz
 Ipari fűtőrendszerek hőmérsékletszabályozó egységei LP3 vezérlőegység MINIGAZ Evolution hőlégfúvókhoz SZERELÉSI ÉS KEZELÉSI UTASÍTÁS 2016.05.20. - 2 - LEÍRÁS Az LP3 típusú, kihelyezhető hőmérsékletérzékelővel
Ipari fűtőrendszerek hőmérsékletszabályozó egységei LP3 vezérlőegység MINIGAZ Evolution hőlégfúvókhoz SZERELÉSI ÉS KEZELÉSI UTASÍTÁS 2016.05.20. - 2 - LEÍRÁS Az LP3 típusú, kihelyezhető hőmérsékletérzékelővel
CALL ME COWELDER 1 EGY EGYÜTTMŰKÖDŐ HEGESZTŐROBOT VAGYOK BEÉPÍTETT BIZTONSÁGI RENDSZER CE JELÖLÉSSEL RENDELKEZIK... KICSI ÉS OKOS CSOMAGOK ÉS ÁRAK ...
 BEÉPÍTETT BIZTONSÁGI RENDSZER CE JELÖLÉSSEL RENDELKEZIK...... KICSI ÉS OKOS... CSOMAGOK ÉS ÁRAK CALL ME COWELDER 1 EGY EGYÜTTMŰKÖDŐ HEGESZTŐROBOT VAGYOK TARTALOM Új hegesztőasszisztens 3 Hegesztőgépek
BEÉPÍTETT BIZTONSÁGI RENDSZER CE JELÖLÉSSEL RENDELKEZIK...... KICSI ÉS OKOS... CSOMAGOK ÉS ÁRAK CALL ME COWELDER 1 EGY EGYÜTTMŰKÖDŐ HEGESZTŐROBOT VAGYOK TARTALOM Új hegesztőasszisztens 3 Hegesztőgépek
TARTALOM JEGYZÉK. Strobe controller. Tartalom
 Strobe controller TARTALOM JEGYZÉK Tartalom.............................................................................3 Általános tudnivalók.....................................................................4
Strobe controller TARTALOM JEGYZÉK Tartalom.............................................................................3 Általános tudnivalók.....................................................................4
Beállítási utasítás CAME típusú FLY-E Automatika szárnyasajtó meghajtásához
 Beállítási utasítás CAME típusú FLY-E Automatika szárnyasajtó meghajtásához A vásárolt terméket csak megfelelı szakismerettel rendelkezı, cégünk által felkészített szakember szerelheti fel, kötheti be
Beállítási utasítás CAME típusú FLY-E Automatika szárnyasajtó meghajtásához A vásárolt terméket csak megfelelı szakismerettel rendelkezı, cégünk által felkészített szakember szerelheti fel, kötheti be
PERREKUP DxxTx - HDK10 Rekuperátor vezérlő Használati Utasítás
 PERREKUP DxxTx - HDK10 Rekuperátor vezérlő Használati Utasítás Permanent Kft ver.20130502 Műszaki adatok Hálózati feszültség 220-240V AC / 50Hz Működési hőmérséklettartomány -30 ~ +65 C Maximális relatív
PERREKUP DxxTx - HDK10 Rekuperátor vezérlő Használati Utasítás Permanent Kft ver.20130502 Műszaki adatok Hálózati feszültség 220-240V AC / 50Hz Működési hőmérséklettartomány -30 ~ +65 C Maximális relatív
Leica ST5020. Többfunkciós Festőautomata
 Leica ST5020 Többfunkciós Festőautomata Leica ST5020 többfunkciós Festőautomata páratlan rugalmassággal a jobb eredmények eléréséért A Leica ST5020 többfunkciós festőautomata bevezetésével egy új teljesítményszint
Leica ST5020 Többfunkciós Festőautomata Leica ST5020 többfunkciós Festőautomata páratlan rugalmassággal a jobb eredmények eléréséért A Leica ST5020 többfunkciós festőautomata bevezetésével egy új teljesítményszint
Motorizált infravörös vonali füstérzékelő. Kiegészítő információ
 Motorizált infravörös vonali füstérzékelő Kiegészítő információ HU 1. Többzónás kábelezés Amikor egy hagyományos tűzjelző vezérlőpanel (FCP) egy zónájához több mint egy rendszervezérlőt használ, fontos
Motorizált infravörös vonali füstérzékelő Kiegészítő információ HU 1. Többzónás kábelezés Amikor egy hagyományos tűzjelző vezérlőpanel (FCP) egy zónájához több mint egy rendszervezérlőt használ, fontos
Digital Pool Controller. (RPS-2) ph-dewan Felhasználói leírás
 ph-dewan Felhasználói leírás") Digital Pool Controller (RPS-2) ph-dewan Felhasználói leírás A készülék feladata a medence vizének ph és Dw szintjének optimalizálása. 1. Felépítés, fõ funkciók. 1.1. Mérés, kalibrálás A készülék két teljesen
Digital Pool Controller (RPS-2) ph-dewan Felhasználói leírás A készülék feladata a medence vizének ph és Dw szintjének optimalizálása. 1. Felépítés, fõ funkciók. 1.1. Mérés, kalibrálás A készülék két teljesen
CNC Függőleges megmunkálóközpont
 GO98 AKCIÓ a Bemutatóteremből egyenesen az Ön üzemébe CNC Függőleges megmunkálóközpont HSM-116A Mozgástartomány X tengely 1,100mm Y tengely 650mm Z tengely 600mm GO98 SZERSZÁMGÉPEK HSM-116A Oldal: 1-12
GO98 AKCIÓ a Bemutatóteremből egyenesen az Ön üzemébe CNC Függőleges megmunkálóközpont HSM-116A Mozgástartomány X tengely 1,100mm Y tengely 650mm Z tengely 600mm GO98 SZERSZÁMGÉPEK HSM-116A Oldal: 1-12
Nagy kiterjedésű termékek hegesztése. Egy kis folytatás az előző alkalomhoz
 Nagy kiterjedésű termékek hegesztése Egy kis folytatás az előző alkalomhoz Nagy kiterjedésű termékek hegesztése JIGles welding példa Példa vízsugaras vágásra Kiszolgáló robotrendszerek Kiszolgáló robotrendszerek
Nagy kiterjedésű termékek hegesztése Egy kis folytatás az előző alkalomhoz Nagy kiterjedésű termékek hegesztése JIGles welding példa Példa vízsugaras vágásra Kiszolgáló robotrendszerek Kiszolgáló robotrendszerek
MITSUI S. HU40A Gyártó cella FMS (3db alapgép + 1db robot + 60db AROVA paletta)
") MITSUI S. HU40A Gyártó cella FMS (3db alapgép + 1db robot + 60db AROVA paletta) 400 x 400 mm 60-1200 1/min. Főmotor teljesítménye 12\15 kw Főorsó kúp BT 40 Asztal poz.: 0,001 (folyamatos) Fanuc 16i Robot:
MITSUI S. HU40A Gyártó cella FMS (3db alapgép + 1db robot + 60db AROVA paletta) 400 x 400 mm 60-1200 1/min. Főmotor teljesítménye 12\15 kw Főorsó kúp BT 40 Asztal poz.: 0,001 (folyamatos) Fanuc 16i Robot:
Érintkezés nélküli érzékelés és mérés robotcellában
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Villamosmérnöki és Informatikai kar Irányítástechnika és Informatika Tanszék Folyamatirányítás Laboratórium Érintkezés nélküli érzékelés és mérés robotcellában
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Villamosmérnöki és Informatikai kar Irányítástechnika és Informatika Tanszék Folyamatirányítás Laboratórium Érintkezés nélküli érzékelés és mérés robotcellában
C30 Láncos Ablakmozgató motor Telepítési útmutató
 1 C30 Láncos Ablakmozgató motor Telepítési útmutató Figyelem! A motorról a működtetés után a hálózati 230V-os feszültséget le kell kapcsolni. A motort vagy visszabillenős kapcsolóról vagy beállítható munkaidejű
1 C30 Láncos Ablakmozgató motor Telepítési útmutató Figyelem! A motorról a működtetés után a hálózati 230V-os feszültséget le kell kapcsolni. A motort vagy visszabillenős kapcsolóról vagy beállítható munkaidejű
LED DRIVER 6. 6 csatornás 12-24V-os LED meghajtó. (RDM Kompatibilis) Kezelési útmutató
 Kezelési útmutató") LED DRIVER 6 6 csatornás 12-24V-os LED meghajtó (RDM Kompatibilis) Kezelési útmutató Tartsa meg a dokumentumot, a jövőben is szüksége lehet rá! rev 2 2015.09.30 DEZELECTRIC LED DRIVER Bemutatás A LED DRIVER
LED DRIVER 6 6 csatornás 12-24V-os LED meghajtó (RDM Kompatibilis) Kezelési útmutató Tartsa meg a dokumentumot, a jövőben is szüksége lehet rá! rev 2 2015.09.30 DEZELECTRIC LED DRIVER Bemutatás A LED DRIVER
műhelyből sem hiányozhat.
 Egyetlen műhelyből sem hiányozhat. A Bosch PBD 40 asztali fúrógép. ÚJ! A Bosch PBD 40 asztali fúrógép a legnagyobb fokú pontossághoz és kezelési komforthoz. További információkat a www.bosch-do-it.hu honlapon
Egyetlen műhelyből sem hiányozhat. A Bosch PBD 40 asztali fúrógép. ÚJ! A Bosch PBD 40 asztali fúrógép a legnagyobb fokú pontossághoz és kezelési komforthoz. További információkat a www.bosch-do-it.hu honlapon
Belépés a rendszerbe. Gyors menü
 Belépés a rendszerbe A menübe lépéshez szükséges alapértelmezett DVR Azonosító /Device ID/: 000000, megadott Jelszó /Password/ nélkül. A rendszer biztonságos használata érdekében az adminisztrátor felhasználónak
Belépés a rendszerbe A menübe lépéshez szükséges alapértelmezett DVR Azonosító /Device ID/: 000000, megadott Jelszó /Password/ nélkül. A rendszer biztonságos használata érdekében az adminisztrátor felhasználónak
TERMÉKISMERTETŐ. NCT KFT BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: , CÉGJEGYZÉKSZÁM:
 Tárgy: NCT KFT. 1148 BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: 12158791-2-42, CÉGJEGYZÉKSZÁM: 01-09-560655, EU. ADÓSZÁM: HU 121 58 791, TEL +36 1 46 76 300, FAX +36 1 46 76 309 BNC-1600 és BNC-1800 típusú CNC
Tárgy: NCT KFT. 1148 BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: 12158791-2-42, CÉGJEGYZÉKSZÁM: 01-09-560655, EU. ADÓSZÁM: HU 121 58 791, TEL +36 1 46 76 300, FAX +36 1 46 76 309 BNC-1600 és BNC-1800 típusú CNC
ECL Comfort 300 / 301 230 V és 24 V váltóáramra
 Adatlap ECL Comfort 300 / 301 230 V és 24 V váltóáramra Felhasználás Az ECL Comfort 300 / 301 idõjáráskövetõ elektronikus szabályozó kívánság szerinti felhasználásra programozható az ECL-kártya segítségével.
Adatlap ECL Comfort 300 / 301 230 V és 24 V váltóáramra Felhasználás Az ECL Comfort 300 / 301 idõjáráskövetõ elektronikus szabályozó kívánság szerinti felhasználásra programozható az ECL-kártya segítségével.
MODUCONTROL HASZNÁLATI UTASÍTÁS
 MODUCONTROL HASZNÁLATI UTASÍTÁS 1 Tartalomjegyzék 1 Bevezető...3 2 A panel gombjainak használata értékek kijelzésére és paraméterek beállítására...4 3 Kiolvasható paraméterlista a hozzá tartozó értékekkel:...5
MODUCONTROL HASZNÁLATI UTASÍTÁS 1 Tartalomjegyzék 1 Bevezető...3 2 A panel gombjainak használata értékek kijelzésére és paraméterek beállítására...4 3 Kiolvasható paraméterlista a hozzá tartozó értékekkel:...5
LM, NM, SM, GM Zsalumozgató, rugó-visszatérítés nélkül. Nyit-zár, 3 pont vezérlés
 Zsalumozgató, rugó-visszatérítés nélkül - - 00. július KIVITEL LM NM SM GM Alkalmazás, illeszthetõség Az LM.., az NM.., az SM.. és a GM.. zsalumozgatók a légtechnikai rendszerek különböző típusú, ill.
Zsalumozgató, rugó-visszatérítés nélkül - - 00. július KIVITEL LM NM SM GM Alkalmazás, illeszthetõség Az LM.., az NM.., az SM.. és a GM.. zsalumozgatók a légtechnikai rendszerek különböző típusú, ill.
Beninca KEN 600 N garázskapu mozgató motor
 1 Beninca KEN 600 N garázskapu mozgató motor Telepítési kézikönyv 2 Technikai adatok Tápfeszültség 230Vac Motor feszültség 24Vdc Teljesítmény 180W Húzósebesség 6.5/5.2m/1 Húzó/tólóerő 800N Védelem IPXO
1 Beninca KEN 600 N garázskapu mozgató motor Telepítési kézikönyv 2 Technikai adatok Tápfeszültség 230Vac Motor feszültség 24Vdc Teljesítmény 180W Húzósebesség 6.5/5.2m/1 Húzó/tólóerő 800N Védelem IPXO
Nyomja meg a "mentést" Képernyő "Armstrong CA 6000" Nyomja meg az "Enter" "Nyelvi. Nyomja meg a " " 2X. Működés beállítása. Nyomja meg az "Enter"
 Nyomja meg a "mentést" "Armstrong CA 6000" "Nyelvi Nyomja meg a " " 2X Működés beállítása Nyomja meg az ENTER Adja meg jelszavát "0000" Nyomja meg a " " 2X "Hálózat beállítása" "Letiltás" Engedélyezés
Nyomja meg a "mentést" "Armstrong CA 6000" "Nyelvi Nyomja meg a " " 2X Működés beállítása Nyomja meg az ENTER Adja meg jelszavát "0000" Nyomja meg a " " 2X "Hálózat beállítása" "Letiltás" Engedélyezés
ECL Comfort V és 24 V váltóáramra
 Adatlap ECL Comfort 200 230 V és 24 V váltóáramra Felhasználás Az ECL Comfort 200 idõjáráskövetõ elektronikus szabályozót elõprogramoztuk több különféle felhasználási célhoz. Mindegyik alkalmazásnak saját
Adatlap ECL Comfort 200 230 V és 24 V váltóáramra Felhasználás Az ECL Comfort 200 idõjáráskövetõ elektronikus szabályozót elõprogramoztuk több különféle felhasználási célhoz. Mindegyik alkalmazásnak saját
6. Robotok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
Az RM 01 típusú PUMA robot programozása
 Az RM 01 típusú PUMA robot programozása Dr. Szalay Tibor Operációs rendszer parancsok Parancsok a pontok meghatározásához CHANGE (pont) A parancs a robot vezérelt pontjának koordináta értékeit jeleníti
Az RM 01 típusú PUMA robot programozása Dr. Szalay Tibor Operációs rendszer parancsok Parancsok a pontok meghatározásához CHANGE (pont) A parancs a robot vezérelt pontjának koordináta értékeit jeleníti
Mark like a Professional. FlyMarker PRO Jelölő rendszer
 Mark like a Professional FlyMarker PRO Jelölő rendszer Mark like a Professional FlyMarker PRO MOBIL Berendezés FlyMarker PRO kézi jelölő rendszer szinte gyerekjátékká teszi a terjedelmes, nagy, nem mozdítható
Mark like a Professional FlyMarker PRO Jelölő rendszer Mark like a Professional FlyMarker PRO MOBIL Berendezés FlyMarker PRO kézi jelölő rendszer szinte gyerekjátékká teszi a terjedelmes, nagy, nem mozdítható
Szerelési és beáll ít ási utasítás
 Szerelési és beáll ít ási utasítás SOMFY Altus 50 RTS / 60 RTS cs őm otorok Az Altus RTS csőmotorok speciálisan a könyökkaros napellenzőkhöz lettek kifejlesztve, de redőnyökhöz is kiválóan alkalmazhatók.
Szerelési és beáll ít ási utasítás SOMFY Altus 50 RTS / 60 RTS cs őm otorok Az Altus RTS csőmotorok speciálisan a könyökkaros napellenzőkhöz lettek kifejlesztve, de redőnyökhöz is kiválóan alkalmazhatók.
HASZNÁLATI ÚTMUTATÓ POLYCOM HDX VIDEOKONFERENCIA RENDSZERHEZ
 HASZNÁLATI ÚTMUTATÓ POLYCOM HDX VIDEOKONFERENCIA RENDSZERHEZ - FONTOS TEENDŐK VIDEOKONFERENCIA ELŐTT - A VIDEOKONFERENCIA ÜZEMBE HELYEZÉSE - HÍVÁS KEZDEMÉNYEZÉSE ÉS FOGADÁSA - A KAMERA ÉS A MIKROFON HASZNÁLATA
HASZNÁLATI ÚTMUTATÓ POLYCOM HDX VIDEOKONFERENCIA RENDSZERHEZ - FONTOS TEENDŐK VIDEOKONFERENCIA ELŐTT - A VIDEOKONFERENCIA ÜZEMBE HELYEZÉSE - HÍVÁS KEZDEMÉNYEZÉSE ÉS FOGADÁSA - A KAMERA ÉS A MIKROFON HASZNÁLATA
CE52-24/F(C) Központi vezérlő. Kezelési kézikönyv
 Központi vezérlő. Kezelési kézikönyv") CE52-24/F(C) Központi vezérlő Kezelési kézikönyv KIJELZŐ A főoldal megjelenése: Szám Megnevezés Leírás 1 Üzemmód Ha a beltéri egység üzemel, az aktuális üzemmódot jelzi ki. 2 Ha a beltéri egységek több
CE52-24/F(C) Központi vezérlő Kezelési kézikönyv KIJELZŐ A főoldal megjelenése: Szám Megnevezés Leírás 1 Üzemmód Ha a beltéri egység üzemel, az aktuális üzemmódot jelzi ki. 2 Ha a beltéri egységek több
Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei
 Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei Paraméter Érték Leírás F0.00 F0.02 0 Billentyűzet potméter 4 Külső potméter VC1 bemenetre 0 Vezérlés billentyűzetről 1 Vezérlés sorkapcsokról 3 Vezérlés
Encom EDS800/EDS1000 frekvenciaváltó alapparaméterei Paraméter Érték Leírás F0.00 F0.02 0 Billentyűzet potméter 4 Külső potméter VC1 bemenetre 0 Vezérlés billentyűzetről 1 Vezérlés sorkapcsokról 3 Vezérlés
DURMA VS CNC típusú állítható vágószögű hidraulikus lemezolló
 DURMA VS CNC típusú állítható vágószögű hidraulikus lemezolló A DURMAZLAR CÉG BEMUTATÁSA A Durmazlar Machine Törökország vezető gépgyártó vállalata, mely éves termelését tekintve világelső a fémmegmunkáló
DURMA VS CNC típusú állítható vágószögű hidraulikus lemezolló A DURMAZLAR CÉG BEMUTATÁSA A Durmazlar Machine Törökország vezető gépgyártó vállalata, mely éves termelését tekintve világelső a fémmegmunkáló
CNC Robot Robomachine. LR Mate 200iD
 CNC Robot Robomachine LR Mate 200iD LR Mate 200iD Tartalom Bevezetés 03 Főbb jellemzők 04 Opciók 05 Műszaki adatok 06 Csuklóterhelési diagram 07 Méretek Munkatér és külső méretek 08 Csukló 09 Ráépített
CNC Robot Robomachine LR Mate 200iD LR Mate 200iD Tartalom Bevezetés 03 Főbb jellemzők 04 Opciók 05 Műszaki adatok 06 Csuklóterhelési diagram 07 Méretek Munkatér és külső méretek 08 Csukló 09 Ráépített
Raklapfóliázó gépek. ALPHA Csomagolástechnikai Kft. ALPHA LEONARDO AI-D LEONARDO 2000 ID-X
 Raklapfóliázó gépek TSX FA AI-D LEONARDO ID-X LEONARDO 2000 ELC/SX 650 Csomagolástechnikai Kft. Opciós kiegészítők A gép jellemzői: - Félautomata raklapfóliázó gép. - Elektronikus vezérlő panel a paraméterek
Raklapfóliázó gépek TSX FA AI-D LEONARDO ID-X LEONARDO 2000 ELC/SX 650 Csomagolástechnikai Kft. Opciós kiegészítők A gép jellemzői: - Félautomata raklapfóliázó gép. - Elektronikus vezérlő panel a paraméterek
Új kompakt X20 vezérlő integrált I/O pontokkal
 Új kompakt X20 vezérlő integrált I/O pontokkal Integrált flash 4GB belső 16 kb nem felejtő RAM B&R tovább bővíti a nagy sikerű X20 vezérlő családot, egy kompakt vezérlővel, mely integrált be és kimeneti
Új kompakt X20 vezérlő integrált I/O pontokkal Integrált flash 4GB belső 16 kb nem felejtő RAM B&R tovább bővíti a nagy sikerű X20 vezérlő családot, egy kompakt vezérlővel, mely integrált be és kimeneti
ERGO-STW-3D HEGESZTŐASZTALOK
 ERGO-STW-3D HEGESZTŐASZTALOK Alkalmazási terület Az ERGO-STW-3D asztalokat hegesztőhelyek teljes mértékű elszívásához használják. Ezeket a hegesztési folyamatok során keletkezett porral szennyezett levegő
ERGO-STW-3D HEGESZTŐASZTALOK Alkalmazási terület Az ERGO-STW-3D asztalokat hegesztőhelyek teljes mértékű elszívásához használják. Ezeket a hegesztési folyamatok során keletkezett porral szennyezett levegő
Danfoss tréning program 2018
 Danfoss tréning program 2018 VLT HVAC Drive és VLT AQUA Drive tréning Épületgépészeti és víztechnikai, vízkezelési tréning Épületgépészeti és vízkezelési alkalmazásokban használt frekvenciaváltók működési
Danfoss tréning program 2018 VLT HVAC Drive és VLT AQUA Drive tréning Épületgépészeti és víztechnikai, vízkezelési tréning Épületgépészeti és vízkezelési alkalmazásokban használt frekvenciaváltók működési
QAA73 kezelési utasítás felhasználóknak, beüzemelőknek
 QAA7 kezelési utasítás felhasználóknak, beüzemelőknek JELLEMZŐK Működési feszültség Védelem OpenTherm bus Csatlakoztathatóság Vezeték hossz Vezeték ellenálló képessége Teljesítményfelvétel Biztonsági szint
QAA7 kezelési utasítás felhasználóknak, beüzemelőknek JELLEMZŐK Működési feszültség Védelem OpenTherm bus Csatlakoztathatóság Vezeték hossz Vezeték ellenálló képessége Teljesítményfelvétel Biztonsági szint
Teljes körű szolgáltatások a robotkar végére szerelhető szerszámokhoz Az OnRobot fogó- és érzékelési technológiák széles választékát kínálja ipari
 Teljes körű szolgáltatások a robotkar végére szerelhető szerszámokhoz Az OnRobot fogó- és érzékelési technológiák széles választékát kínálja ipari automatizálási célokra Mi gondoskodunk a megtakarításról,
Teljes körű szolgáltatások a robotkar végére szerelhető szerszámokhoz Az OnRobot fogó- és érzékelési technológiák széles választékát kínálja ipari automatizálási célokra Mi gondoskodunk a megtakarításról,
Q36A VEZÉRLÉS EGY-VAGY TÖBBSZÁRNYAS KAPUKHOZ
 Q36A VEZÉRLÉS EGY-VAGY TÖBBSZÁRNYAS KAPUKHOZ A VEZÉRLŐEGYSÉG RÉSZEI A A választó gomb B B választó gomb C Megerősítő gomb (YES) / Emelkedés D Tiltó gomb (NO) / Csökkenés F1 24 V AC, 800 ma biztosíték F2
Q36A VEZÉRLÉS EGY-VAGY TÖBBSZÁRNYAS KAPUKHOZ A VEZÉRLŐEGYSÉG RÉSZEI A A választó gomb B B választó gomb C Megerősítő gomb (YES) / Emelkedés D Tiltó gomb (NO) / Csökkenés F1 24 V AC, 800 ma biztosíték F2
GIGA 4 EASYRX433 Sorompó vezérlés
 GIGA 4 EASYRX433 Sorompó vezérlés Telepítői és használati utasítás 1.)Biztonsági figyelmeztetések: Bármely nem szakember által végzett telepítés, javítás vagy beállítás szigorúan tilos. Minden beavatkozás
GIGA 4 EASYRX433 Sorompó vezérlés Telepítői és használati utasítás 1.)Biztonsági figyelmeztetések: Bármely nem szakember által végzett telepítés, javítás vagy beállítás szigorúan tilos. Minden beavatkozás
Általános útmutató FIGYELMEZTETŐ VIGYÁZAT
 Általános útmutató Figyelmesen olvassa el a használati útmutatót, mielőtt használná a készüléket. Ez az útmutató információkat ad arról, hogyan kell üzembe helyezni és használni a készüléket. A használati
Általános útmutató Figyelmesen olvassa el a használati útmutatót, mielőtt használná a készüléket. Ez az útmutató információkat ad arról, hogyan kell üzembe helyezni és használni a készüléket. A használati
HASZNÁLATI ÚTMUTATÓ HU IN 7265 Fali eredménykijelző insportline CF040
 HASZNÁLATI ÚTMUTATÓ HU IN 7265 Fali eredménykijelző insportline CF040 BEVEZETŐ INFORMÁCIÓK Az eredménykijelző sok alapfunkciót kínál: idő, stopper, 20 perces leszámolás, Fight Gone Bad funkció időzítő.
HASZNÁLATI ÚTMUTATÓ HU IN 7265 Fali eredménykijelző insportline CF040 BEVEZETŐ INFORMÁCIÓK Az eredménykijelző sok alapfunkciót kínál: idő, stopper, 20 perces leszámolás, Fight Gone Bad funkció időzítő.
RAGADJA MEG AZ ALKALMAT!
 Az akció 2014 november 1-től december 19-ig érvényes. Fenntartjuk a technikai változtatások és fejlesztések jogát; az árak csak kereskedelmi ügyfeleink számára érvényesek; Az összes ár nettó árként értendő
Az akció 2014 november 1-től december 19-ig érvényes. Fenntartjuk a technikai változtatások és fejlesztések jogát; az árak csak kereskedelmi ügyfeleink számára érvényesek; Az összes ár nettó árként értendő
Dinnyeválogató v2.0. Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1-
 Dinnyeválogató v2.0 Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1- Omron K3HB-VLC elektronika illesztése mérlegcellához I. A HBM PW10A/50 mérlegcella csatlakoztatása
Dinnyeválogató v2.0 Típus: Dinnyeválogató v2.0 Program: Dinnye2 Gyártási év: 2011 Sorozatszám: 001-1- Omron K3HB-VLC elektronika illesztése mérlegcellához I. A HBM PW10A/50 mérlegcella csatlakoztatása
ML4195E/8195E. 16Nm-es rugóvisszatérítésű zsalumozgatók On / Off - szabályozásokhoz JELLEMZŐK MŰSZAKI ADATOK ÁLTALÁNOS
 70 90 80 70 30 50 60 15 2 3 4 5 2 25 5 30 ML4195E/8195E 16Nm-es rugóvisszatérítésű zsalumozgatók On / Off - szabályozásokhoz 3325. KTLÓGUSLP PRODUCT TERMÉKLEÍRÁS DT 90 JELLEMZŐK Kétirányú, hibabiztos rugóvisszatérítés
70 90 80 70 30 50 60 15 2 3 4 5 2 25 5 30 ML4195E/8195E 16Nm-es rugóvisszatérítésű zsalumozgatók On / Off - szabályozásokhoz 3325. KTLÓGUSLP PRODUCT TERMÉKLEÍRÁS DT 90 JELLEMZŐK Kétirányú, hibabiztos rugóvisszatérítés
14-es sorozat - Többfunkciós lépcsõházi automaták 16 A
 Többfunkciós lépcsõházi automaták Mûködtetés nyomógombokkal vagy glimmlámpás világító nyomógombokkal 17,5 mm-es szélesség A késleltetési idõ 30 s-tól 20 min-ig állítható ámpakímélõ üzem a feszültség nullátmenetnél
Többfunkciós lépcsõházi automaták Mûködtetés nyomógombokkal vagy glimmlámpás világító nyomógombokkal 17,5 mm-es szélesség A késleltetési idõ 30 s-tól 20 min-ig állítható ámpakímélõ üzem a feszültség nullátmenetnél
Szélkövetés: Ehhez az üzemmódhoz a PR3-as paraméter értékét 0-ra kell állítani.
 Szélkövető v4 1 Bekapcsolást követően a szélkövető elektronika kijelzőjén a SZEL42 felirat jelenik meg néhány másodpercre, majd ezt követően pedig az ALAP felirat (Az Auto/Kézi kapcsoló lekapcsolva). A
Szélkövető v4 1 Bekapcsolást követően a szélkövető elektronika kijelzőjén a SZEL42 felirat jelenik meg néhány másodpercre, majd ezt követően pedig az ALAP felirat (Az Auto/Kézi kapcsoló lekapcsolva). A
CAD-ART Kft. 1117 Budapest, Fehérvári út 35.
 CAD-ART Kft. 1117 Budapest, Fehérvári út 35. Tel./fax: (36 1) 361-3540 email : cad-art@cad-art.hu http://www.cad-art.hu PEPS CNC Programozó Rendszer Oktatási Segédlet Laser megmunkálás PEPS 4 laser megmunkálási
CAD-ART Kft. 1117 Budapest, Fehérvári út 35. Tel./fax: (36 1) 361-3540 email : cad-art@cad-art.hu http://www.cad-art.hu PEPS CNC Programozó Rendszer Oktatási Segédlet Laser megmunkálás PEPS 4 laser megmunkálási
Premier 412, 816, 816+ és 832 felhasználói útmutató. Kezelési útmutató. PREMIER 412, 816, 816+ és 832 központokhoz
 Kezelési útmutató PREMIER 412, 816, 816+ és 832 központokhoz RKP4, 8 és 16 kezelőegység használatával A kezelőegység felépítése Az Ön vagyonvédelmi rendszeréhez egy vagy több kezelőegység csatlakozik.
Kezelési útmutató PREMIER 412, 816, 816+ és 832 központokhoz RKP4, 8 és 16 kezelőegység használatával A kezelőegység felépítése Az Ön vagyonvédelmi rendszeréhez egy vagy több kezelőegység csatlakozik.
DURMA SBT típusú billenőgerendás hidraulikus lemezolló
 DURMA SBT típusú billenőgerendás hidraulikus lemezolló A DURMAZLAR CÉG BEMUTATÁSA A Durmazlar Machine Törökország vezető gépgyártó vállalata, mely éves termelését tekintve világelső a fémmegmunkáló gépek
DURMA SBT típusú billenőgerendás hidraulikus lemezolló A DURMAZLAR CÉG BEMUTATÁSA A Durmazlar Machine Törökország vezető gépgyártó vállalata, mely éves termelését tekintve világelső a fémmegmunkáló gépek
Használati utasítás. SD BannerWeld Pro. Figyelem! A leírásban foglalt utasítások elmulasztása a berendezés meghibásodásához vezethet!
 Használati utasítás SD BannerWeld Pro 1. Figyelem! A leírásban foglalt utasítások elmulasztása a berendezés meghibásodásához vezethet! 5100 Jászberény, Alkotás u. 4. - Ügyfélszolgálat: +36 57 506510 -
Használati utasítás SD BannerWeld Pro 1. Figyelem! A leírásban foglalt utasítások elmulasztása a berendezés meghibásodásához vezethet! 5100 Jászberény, Alkotás u. 4. - Ügyfélszolgálat: +36 57 506510 -
HSS60 ( ) típusú léptetőmotor meghajtó
 típusú léptetőmotor meghajtó") HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
HSS60 (93.034.027) típusú léptetőmotor meghajtó Jellemzők Teljesen zárt kör Alacsony motorzaj Alacsony meghajtó és motormelegedés Gyors válaszidő, nagy motorsebesség Optikailag leválasztott ki és bemenetek
Mark like a Professional. NetMarker Asztali jelölő rendszer
 Mark like a Professional NetMarker Asztali jelölő rendszer Mark like a Professional NetMarker A kompakt asztali jelölő rendszer A NetMarker, az innovatív, hálózat kompatibilis CNC asztali jelölő rendszer,
Mark like a Professional NetMarker Asztali jelölő rendszer Mark like a Professional NetMarker A kompakt asztali jelölő rendszer A NetMarker, az innovatív, hálózat kompatibilis CNC asztali jelölő rendszer,
CE53-24/F(C) Központi vezérlő. Kezelési kézikönyv
 Központi vezérlő. Kezelési kézikönyv") CE53-24/F(C) Központi vezérlő Kezelési kézikönyv KIJELZŐ A főoldal megjelenése: Szám Megnevezés Leírás 1 Üzemmód Ha a beltéri egység üzemel, az aktuális üzemmódot jelzi ki. 2 Ha a beltéri egységek több
CE53-24/F(C) Központi vezérlő Kezelési kézikönyv KIJELZŐ A főoldal megjelenése: Szám Megnevezés Leírás 1 Üzemmód Ha a beltéri egység üzemel, az aktuális üzemmódot jelzi ki. 2 Ha a beltéri egységek több
KEZELÉSI ÚTMUTATÓ STORESAFE PRO II DIGITÁLIS RÖGZÍTŐ
 KEZELÉSI ÚTMUTATÓ STORESAFE PRO II DIGITÁLIS RÖGZÍTŐ A rendszer telepítője és a kézikönyv készítője: MULTI ALARM ZRT. 1092 Budapeset, Bakáts tér 2. Tel.: 1/666-2130; Fax: 1/666-2180 www.multialarm.hu budapest@multialarm.hu
KEZELÉSI ÚTMUTATÓ STORESAFE PRO II DIGITÁLIS RÖGZÍTŐ A rendszer telepítője és a kézikönyv készítője: MULTI ALARM ZRT. 1092 Budapeset, Bakáts tér 2. Tel.: 1/666-2130; Fax: 1/666-2180 www.multialarm.hu budapest@multialarm.hu
VDT-24 Felhasználói kézikönyv
 2-VEZETÉKES KAPUTELEFON RENDSZER Beltéri egység VDT-24 Felhasználói kézikönyv VDT-24 Leírás v1.0 Tartalomjegyzék 1. Készülék felépítése és funkciói...3 2. Monitor falra szerelése...4 3. Főmenü...5 4. Alap
2-VEZETÉKES KAPUTELEFON RENDSZER Beltéri egység VDT-24 Felhasználói kézikönyv VDT-24 Leírás v1.0 Tartalomjegyzék 1. Készülék felépítése és funkciói...3 2. Monitor falra szerelése...4 3. Főmenü...5 4. Alap
Starset-Con. Szerelési útmutató. Kérjük felszerelés és üzemelés előtt figyelmesen olvassa át a használati útmutatót!
 Starset-Con Szerelési útmutató Kérjük felszerelés és üzemelés előtt figyelmesen olvassa át a használati útmutatót! BESZERELÉS ÉS HASZNÁLAT ELŐTT: 1. FIGYELEM: balesetek elkerülése végett az instrukciókat
Starset-Con Szerelési útmutató Kérjük felszerelés és üzemelés előtt figyelmesen olvassa át a használati útmutatót! BESZERELÉS ÉS HASZNÁLAT ELŐTT: 1. FIGYELEM: balesetek elkerülése végett az instrukciókat