ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA. 1. előadás. Dr. Pintér József. Robottechnika
|
|
|
- Artúr Dezső Kerekes
- 8 évvel ezelőtt
- Látták:
Átírás
1 ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1

2 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai helyzet, a fejlődés tendenciái, stb. Az ipari robot és a manipulátor fogalma Robotok kinematikai jellemzői, munkatértípusok, azok jellemzése, összehasonlítása Robotok szerkezeti elemei, hajtásrendszerei, terhelhetősége Robotok irányítása Robotok megfogószerkezetei 2

3 FEJLŐDÉSTÖRTÉNET Löw rabbi GÓLEM " Sem ha foras varázsige "programlapocska" információ hordozó Kempelen Farkas ( ) sakkozógépe (1769) ROBOT szláv eredetű szó "rabota" igás v. kézi napszám,... Karel Capek R.U.R. (Rossum univerzális robotjai színdarab) 1923-ban lefordítják angol nyelvre (Itt a robotok gépi szörnyek, androidok, amelyek az emberek ellen fordulva elpusztították őket, és átvették a hatalmat). 3
 1923-ban lefordítják angol nyelvre (Itt a robotok gépi")
4 FEJLŐDÉSTÖRTÉNET A VDI 2860 irányelv (1981) szerint: Az ipari robot univerzálisan állítható többtengelyű mozgó automata, melynek mozgás-egymásutánisága (utak és szögek) szabadon - mechanikus beavatkozás nélkül programozható és adott esetben szenzorral vezetett, megfogóval, szerszámmal vagy más gyártóeszközzel felszerelhető, anyagkezelési és technológiai feladatra felhasználható 4

 1961-ben megalapítja az UNIMATE céget General Motors részére robot (számjegyes vezérlés, hidraulikus hajtás) 5")
5 FEJLŐDÉSTÖRTÉNET Előzmények: NC-technika, USA, M.I.T. Térbeli felület marógéppel való megmunkálása, egyszerre 3 irányban távműködtetésű manipulátorok, USA, Georg DEVOL szabadalma, Joe Engleberger (a robotika atyja ) 1961-ben megalapítja az UNIMATE céget General Motors részére robot (számjegyes vezérlés, hidraulikus hajtás) 5
 1961-ben megalapítja az")
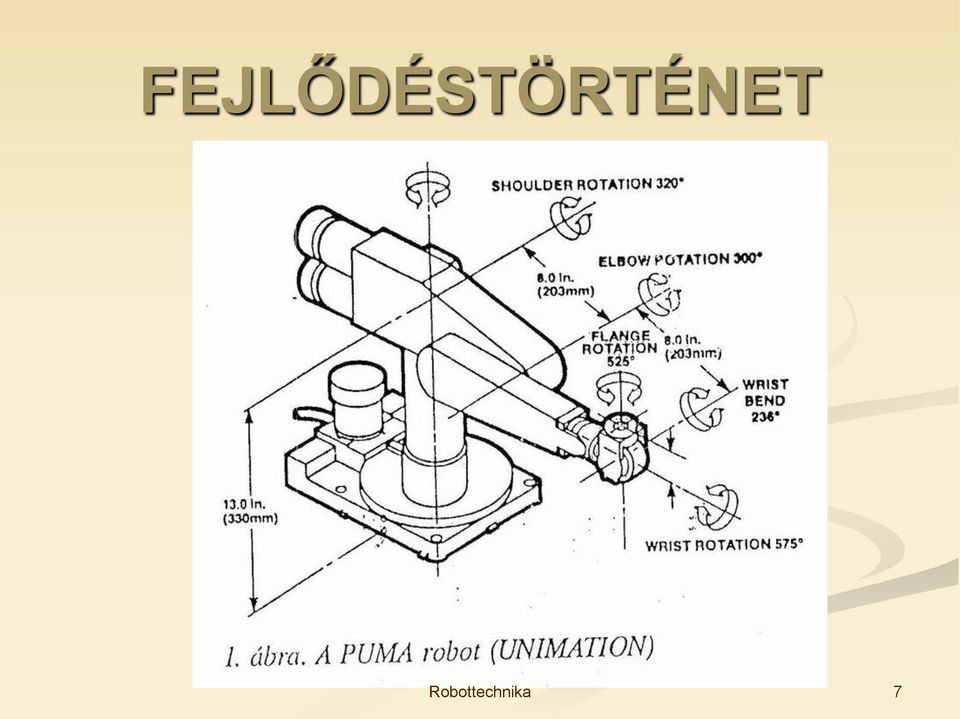
6 FEJLŐDÉSTÖRTÉNET Anglia USA robotokat vásárol Kifejlesztik a Stanford kart, amely egy tisztán villamos hajtású kisrobot, a PUMA sorozat előfutára Az Unimation PUMA sorozatának a bevezetése Világméretben elkezdődik az autonóm mobil robotoknak a fejlesztése. 6

7 FEJLŐDÉSTÖRTÉNET 7
8 Robotok alkalmazása Alkalmazási területek (1980-as években): ponthegesztés 28% ívhegesztés 20% festés 11% szerelés 7%!!! munkadarab kezelés 24% kutatás, oktatás 10% 8

9 Robotok alkalmazása megkezdődik a "csalódás" időszaka telítődött az egyszerű alkalmazások piaca, a szerelés műveletének robotosítása igen nehéz (pl. érzékelők, szoftverek, stb. ) 9

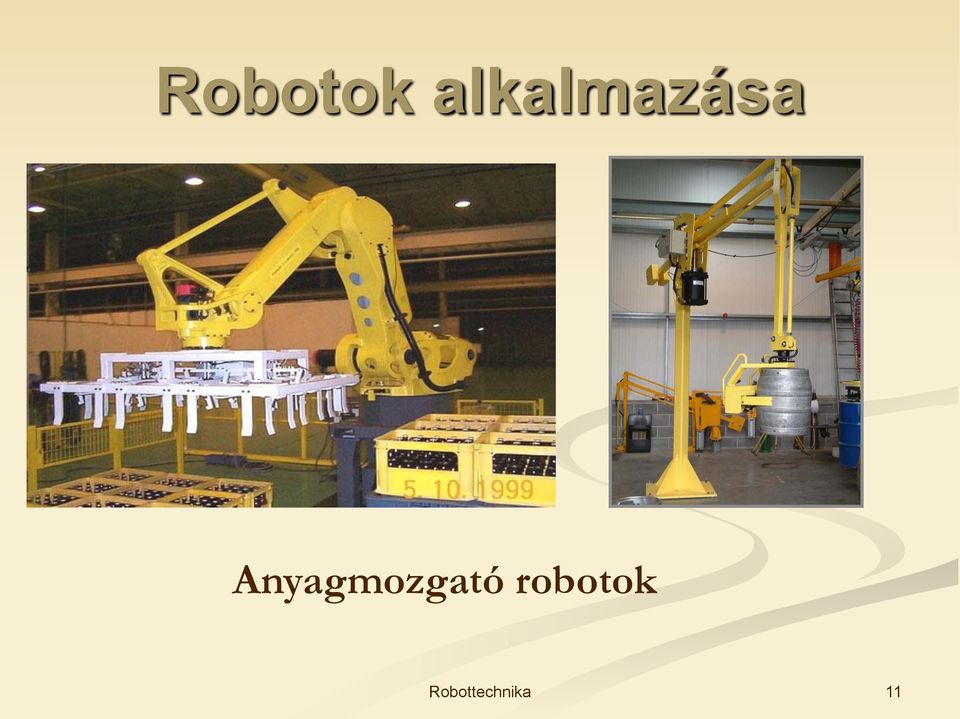
10 Robotok alkalmazása Alkalmazási területek (1990-es években): anyagmozgatás 25% hegesztés (pont- és ívh.) 15% festés 10% szerelés 35%!!! egyéb 15% 10
 15% festés 10% szerelés 35%!")
11 Robotok alkalmazása Anyagmozgató robotok 11
12 Robotok alkalmazása Szerelő robot 12

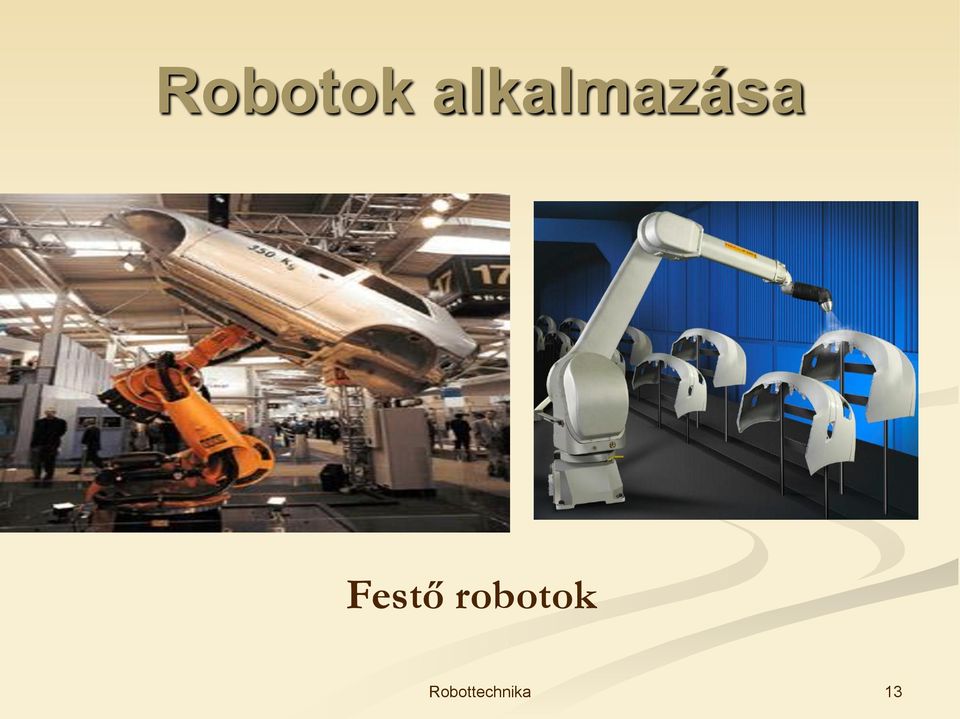
13 Robotok alkalmazása Festő robotok 13
14 Robotok alkalmazása 14

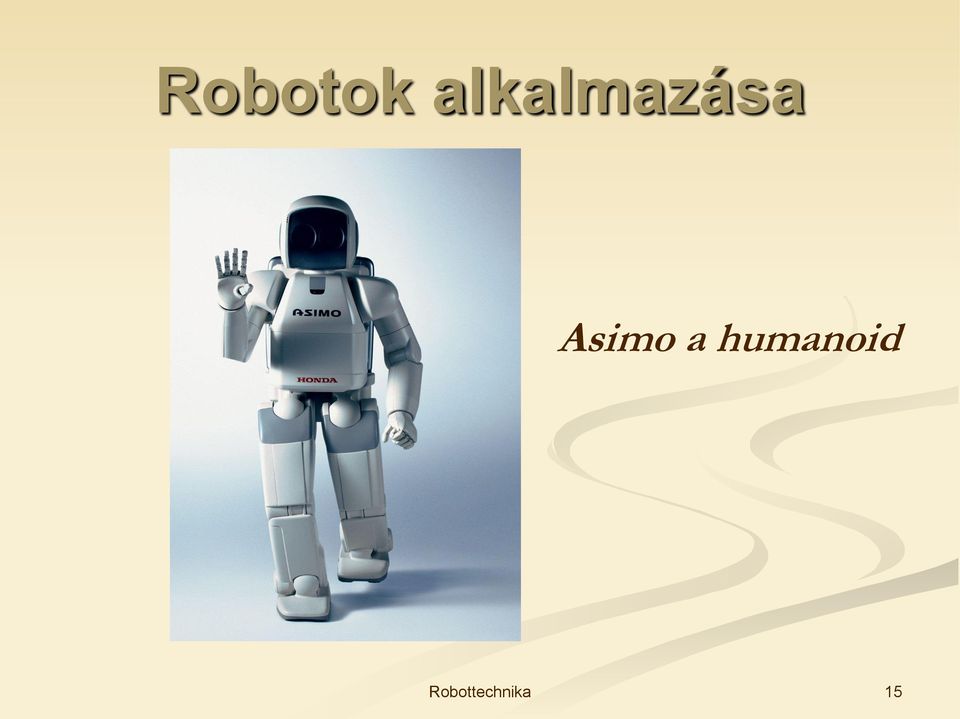
15 Robotok alkalmazása Asimo a humanoid 15
16 Robotok alkalmazása 16
17 Robotok alkalmazása Alkalmazási területek M.on. (1990-es évek): présgépkiszolgálás 25% hegesztés (pont- éls ívh.) 25% festés 5% szerelés 3%? Szerszámgépkiszolgálás 20% oktatás 17% fémöntés és egyéb 5% Hegesztő robot Szerelő robot Hegesztő robot Festőrobot 17



18 Robotok alkalmazása FANUC ROBOT SCARA robot 18

19 Robotok alkalmazása Érdekes a WORLD INDUSTRIAL ROBOTS 1994 Statistics and Forecasts to 1997 összeállítása: alkalmazási gyakorisági sorrend:: ív és ponthegesztés, szerelés, fröccsöntés, szerszámgép kiszolgálás, elembeültetés, különleges munkadarab- és szerszámmanipulálás, palettázás, festékek és vegyszerek adagolása, mérés és ellenőrzés, présgépkiszolgálás, vágás (vízsugaras, plazma és lézeres), forgácsolás, sorjázás, polírozás, festés, bevonatolás, besajtolás, szegecselés, ragasztás, forrasztás, oktatás, kutatás, fejlesztés, egyéb (tömítés, elszívás, stb. ). 19

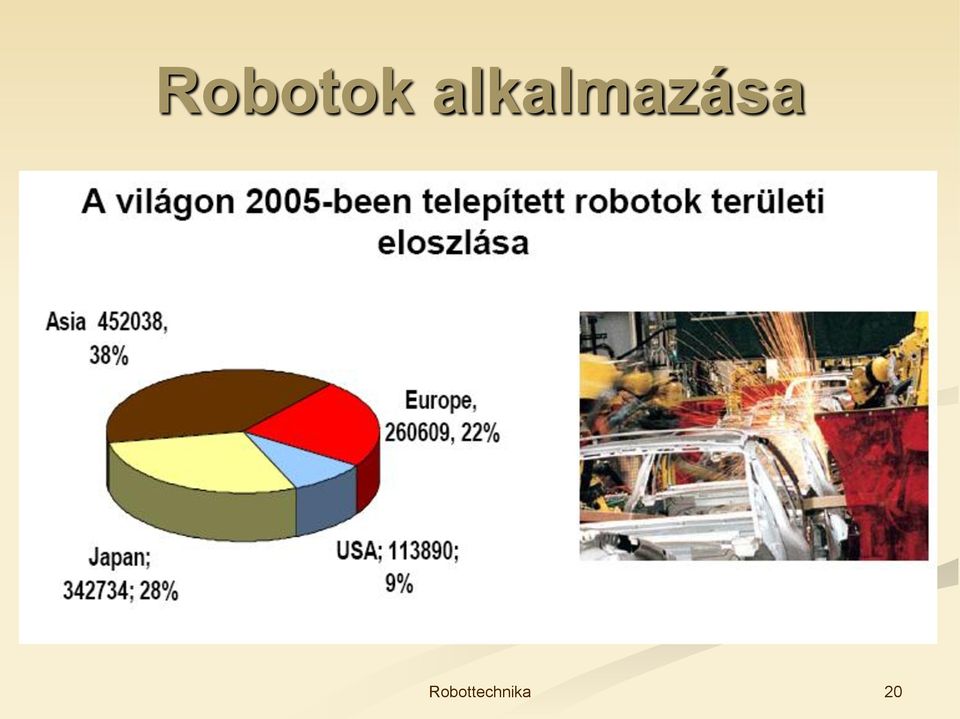
20 Robotok alkalmazása 20
21 Robotok alkalmazása Beruházási javak Fogyasztási javak Alapanyagok és fémek Autóipar 21
22 Robotpiac A nehezen beinduló robotpiac 5,4 milliárd dollárosra nőtt, és egyes elemzők szerint ez 2010-re mintegy17 milliárdra emelkedett. 22
23 Robotpiac 23
24 Robot fejlődési trendek 5. évenként 25%-os robotigény növekedés Növekszik a speciális alkalmazások részaránya Beállási pontosság nő (kisebb mint 1 µm) A legnagyobb teherbírás eléri az 5000 kg-ot A programozható pont sebessége eléri a m/s -ot, a gyorsulás 5-7 G-re nő Az önsúly a jelenlegi 25%-ára, a teljesítményigény 20%-ára csökken Bővül a számítógépes alkalmazások köre Elterjednek az optikai eszközök (pl. lézer) Vezérlésekben megjelenik a CISC és a RISC, a neurális hálózatok, a FUZZY LOGIC megjelenése 24
25 Manipulátor: Ipari robot fogalma Kézzel, vagy gépi úton vezérelt anyagmozgató szerkezet, mely tárgyak megfogását, térbeli helyzetének megváltoztatását, vagy megtartását, majd elengedését biztosítja. 25


26 Ipari robot fogalma Ipari robot: Ujraprogramozható, többcélú manipulátor, amely anyag, alkatrész, szerszám, vagy különleges eszköz változtatható program szerinti mozgatását végzi számos feladatvariáció végrehajtására. Tehát a robot is manipulátor. 26
27 Ipari robot fogalma A robot fogalmának megfogalmazása a VDI 2860 (VDI - Verein Deutscher Ingenieure: Német Mérnök Egyesület) irányelv (1981) szerint: Az ipari robot univerzálisan állítható többtengelyű mozgó automata, melynek mozgás-egymásutánisága (utak és szögek) szabadon - mechanikus beavatkozás nélkül programozható és adott esetben szenzorral vezetett, megfogóval, szerszámmal vagy más gyártóeszközzel felszerelhető, anyagkezelési és technológiai feladatra felhasználható. 27
28 Ipari robot fogalma Egy másik megfogalmazás szerint az ipari robot: mechatronikai szerkezet, amely (nyílt) kinematikai láncú mechanizmust és (intelligens) vezérlést tartalmaz, irányított mozgásokra képes, automatikus működésre képes, előírt programozható feladatokat végez, együttműködik a környezetével. 28
29 Ipari robot fogalma Főbb jellemzői: aktív mesterséges ágens, aminek környezete a teljes fizikai világ, teljes egészében ember készítette szerkezet, mozogni tud, és több szabadságfokkal (több olyan tengellyel, amelyek egymástól függetlenül mozogni képesek) rendelkezik, tevékenységét részben vagy teljesen önállóan irányítja (autonóm). A robotika két okból is kihívást jelentő terület, mert a robotoknak a fizikai világban kell tevékenykedniük, ami sokkal bonyolultabb, mint a legtöbb szimulált szoftvervilág, és olyan hardvert (érzékelőket és beavatkozókat) igényel, amelyek valóban működnek, ezért a robotika gyakorlatilag a mesterséges intelligencia valamennyi összetevőjét igényli. 29
.")
30 Ipari robot fogalma Kézi vezérlésű manipulátor közvetlenül a kezelő által vezérelt szerkezet. A mozgatás a kezelő mozgató erejének mechanikus átvitelével, vagy távvezérléssel lehetséges (master-slave, mester-szolga szerkezetek). Hat szabadságfokú közvetett kézi vezérlésű Manipulátor (Master-slave-System) 30
31 Ipari robot fogalma Hajtásszabályozás blokkdiagramja Mesterkar Tiny-Micro Mark-1 (Japán) mikromanipulátor 31
32 Ipari robot fogalma Exoskeleton Master-slave (mester-szolga) rendszer JET Propulsion Laboratory, USA 32
33 Ipari robot fogalma Robotgenerációk: 1. Generációs robotok: Csak vezérléssel működtethetők A környezet meghatározott Egyszerű feladat Gyorsaság, pontosság jellemzi Nincs alkalmazkodó képessége, nem érzékeli a környezet változásait 33 33
34 Ipari robot fogalma 2. Generációs robotok: Nem egyértelműen meghatározott a tárgyak helyzete, Környezetüket szenzorokkal vizsgálják, A számítógép bármikor képes módosítani a robot mozgását (pl. váratlan akadály), Döntően szerelő robotok, Kikerüli a váratlanul elébe került akadályt, megkeresi és megfogja az elcsúszott tárgyat
35 Ipari robot fogalma 3. Generációs robotok: Mesterséges intelligenciával rendelkeznek (intelligens robotnak is nevezik), s így messzemenően alkalmazkodni tudnak a környezet változásaihoz, Jól alkalmazkodnak a környezet változásaihoz, Alakokat és helyzeteket ismernek fel, Önálló döntéseket hoznak 35 35
36 Ipari robot fogalma 3. Generációs robotok: (Folytatás) Önálló döntéseket hoznak, A környezetből információt szereznek, és ez alapján képesek saját programot írni, szükség esetén módosítja a betáplált programot, tanulási képesség Bonyolult feladatok elvégzésére lehet alkalmas 36 36
37 Robotok alkalmazása ABB robot család ABB IRB 140-es robot 37
38 Robotok alkalmazása Két huzalos eljárással dolgozó hegesztő robot (igm) 38

39 Köszönöm a figyelmet! 39
ROBOTTECHNIKA ALKALMAZÁSOK, ROBOT FOGALMA. Dr. Pintér József
 ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
GÉPIPARI AUTOMATIZÁLÁS
 GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
NGB_AJ008_1 IPARI ROBOTOK
 Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK. Összefoglaló áttekintés. 1. előadás. Dr. Pintér József. Gyártócellák
 GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK. Összefoglaló áttekintés. 1. előadás. Dr. Pintér József. Gyártócellák
 GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
Gyártórendszerek fejlődésének fázisai
 Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe
 Robotika A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe Werner Ágnes Bevezetés Maga a robot szó 1921-ben CARELC CAPEK Rossum Univerzális Robotjai című színdarabjában
Robotika A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe Werner Ágnes Bevezetés Maga a robot szó 1921-ben CARELC CAPEK Rossum Univerzális Robotjai című színdarabjában
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás
 Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Ipari robotok megfogó szerkezetei
 ROBOTTECHNIKA Ipari robotok megfogó szerkezetei 7. előad adás Dr. Pintér József Tananyag vázlatav 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó szerkezetek kialakítása
ROBOTTECHNIKA Ipari robotok megfogó szerkezetei 7. előad adás Dr. Pintér József Tananyag vázlatav 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó szerkezetek kialakítása
5.2 Rugalmas gyártórendszerek alrendszerei. a) A megmunkáló alrendszer és elemei. Megmunkáló alrendszer. Megmunkáló központ
 A megmunkáló alrendszer és elemei. Megmunkáló alrendszer. Megmunkáló központ") Megmunkáló alrendszer 5.2 Rugalmas gyártórendszerek alrendszerei a munkadarabokon a technológiai műveletek elvégzése gyártóberendezések készülékek szerszámok mérőeszközök Anyagmozgatási alrendszer a munkadarabok
Megmunkáló alrendszer 5.2 Rugalmas gyártórendszerek alrendszerei a munkadarabokon a technológiai műveletek elvégzése gyártóberendezések készülékek szerszámok mérőeszközök Anyagmozgatási alrendszer a munkadarabok
Robottechnika. 1. Bevezetés. Ballagi Áron Automatizálási Tanszék
 Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Dr. Ballagi Áron tanszékvezető-helyettes, egyetemi docens Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Dr. Ballagi Áron tanszékvezető-helyettes, egyetemi docens Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
Ipari robotok. A másik megfogalmazásunk ennél tömörebb: A robot olyan, nyílt kinematikai láncú mechanizmus, amely:
 Ipari robotok Mobil robotok egyelőre nem játszanak alapvető szerepet átfogó ipari alkalmazások terén. Jelenleg meglepő tulajdonságokkal rendelkező, leginkább játékra, házibuli-meglepetésként alkalmazható
Ipari robotok Mobil robotok egyelőre nem játszanak alapvető szerepet átfogó ipari alkalmazások terén. Jelenleg meglepő tulajdonságokkal rendelkező, leginkább játékra, házibuli-meglepetésként alkalmazható
IPARI ROBOTOK MEGFOGÓ SZERKEZETEI
 12. GYAKORLAT IPARI ROBOTOK MEGFOGÓ SZERKEZETEI Összeállította: Dr. Merksz István A gyakorlat célja: A megfogó szerkezetek jelentõségének és szerepének feltárása, elsõsorban a forgácsolási és szerelési
12. GYAKORLAT IPARI ROBOTOK MEGFOGÓ SZERKEZETEI Összeállította: Dr. Merksz István A gyakorlat célja: A megfogó szerkezetek jelentõségének és szerepének feltárása, elsõsorban a forgácsolási és szerelési
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA
 XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA Kolozsvár, 2010. március 25-26. ÍVHEGESZTŐ ROBOT ALKALMAZÁSTECHNIKAI JELLEMZŐI BAGYINSZKI Gyula, BITAY Enikő Abstract The arc welding is the important joining
XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA Kolozsvár, 2010. március 25-26. ÍVHEGESZTŐ ROBOT ALKALMAZÁSTECHNIKAI JELLEMZŐI BAGYINSZKI Gyula, BITAY Enikő Abstract The arc welding is the important joining
CNC technika. segédlet a CNC tantárgy oktatásához. Készítette: Paróczai János 2005.12.08
 CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
Zárójelentés. Az autonóm mobil eszközök felhasználási területei, irányítási módszerek
 Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
Marógépek, megmunkáló központok
 1 Marógépek, megmunkáló központok Készült 2010-2011 években a Marcali, Barcs, Kadarkút, Nagyatád Szakképzés Szervezési Társulás részére a TÁMOP-2.2.3-09/1-2009-0016 azonosítószámú projekt keretében HAGYOMÁNYOS
1 Marógépek, megmunkáló központok Készült 2010-2011 években a Marcali, Barcs, Kadarkút, Nagyatád Szakképzés Szervezési Társulás részére a TÁMOP-2.2.3-09/1-2009-0016 azonosítószámú projekt keretében HAGYOMÁNYOS
Korszerű szerszámgépek
 SZÉCHENYI ISTVÁN EGYETEM GYŐR SZERSZÁMGÉPEK (NGB_AJ009_2) Korszerű szerszámgépek Összeállította: Dr. Pintér József 2011.09.26. Korszerű szerszámgépek 1 Korszerű szerszámgépek VÁZLAT 1. Kinematikai alapok,
SZÉCHENYI ISTVÁN EGYETEM GYŐR SZERSZÁMGÉPEK (NGB_AJ009_2) Korszerű szerszámgépek Összeállította: Dr. Pintér József 2011.09.26. Korszerű szerszámgépek 1 Korszerű szerszámgépek VÁZLAT 1. Kinematikai alapok,
- Fanuc 0i TF - Színes TFT monitor - USB Interface és Ethernet - ManualGuide i 3Ds-szimulációval. [Vezérlés]
![- Fanuc 0i TF - Színes TFT monitor - USB Interface és Ethernet - ManualGuide i 3Ds-szimulációval. [Vezérlés]](/thumbs/39/19037363.jpg "- Fanuc 0i TF - Színes TFT monitor - USB Interface és Ethernet - ManualGuide i 3Ds-szimulációval. [Vezérlés]") [ E[M]CONOMY ] jelentése: Több érték a pénzéért. EMCOTURN E65 Univerzális megmunkáló központ rúd- és tárcsa anyagok komplett esztergálási megmunkálásához EMCOTURN E65 [ÚJ] - Fanuc 0i TF - Színes TFT monitor
[ E[M]CONOMY ] jelentése: Több érték a pénzéért. EMCOTURN E65 Univerzális megmunkáló központ rúd- és tárcsa anyagok komplett esztergálási megmunkálásához EMCOTURN E65 [ÚJ] - Fanuc 0i TF - Színes TFT monitor
VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. ELŐADÁSI ANYAG TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. - 1 -
 - 1 - VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. ELŐADÁSI ANYAG *2.A gyártmány és technológia sajátosságai. A gyártandó alkatrész geometriai
- 1 - VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. ELŐADÁSI ANYAG *2.A gyártmány és technológia sajátosságai. A gyártandó alkatrész geometriai
Elektronikus közelítéskapcsolók
 Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
54 523 05 1000 00 00 Mechatronikai technikus Mechatronikai technikus
 Az Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről szóló 133/2010. (IV. 22.) Korm. rendelet alapján. Szakképesítés, szakképesítés-elágazás, rész-szakképesítés,
Az Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről szóló 133/2010. (IV. 22.) Korm. rendelet alapján. Szakképesítés, szakképesítés-elágazás, rész-szakképesítés,
Szent László SZKI Szekszárd HELYI TANTERV
 Szent László SZKI Szekszárd Készítette: Kozár István 2007 HELYI TANTERV Gépészet SZAKMACSOPORT Gépiforgácsoló SZAKMA OKJ SZÁMA: 31 521 09 1000 00 00 ÉRVÉNYES: 2007-től 1 / Feladatok, ismeretek, készségek
Szent László SZKI Szekszárd Készítette: Kozár István 2007 HELYI TANTERV Gépészet SZAKMACSOPORT Gépiforgácsoló SZAKMA OKJ SZÁMA: 31 521 09 1000 00 00 ÉRVÉNYES: 2007-től 1 / Feladatok, ismeretek, készségek
Szívó- és szűrőberendezések (közepes nyomású) A szűrőberendezés felépítése... 71. Intelligens szűréstechnika... 72
 A szűrőberendezés felépítése... 71. Intelligens szűréstechnika... 72") Szívó- és szűrőberendezések (közepes nyomású) A szűrőberendezés felépítése... 71 Intelligens szűréstechnika... 72 Elszívó- és szűrőberendezések részletei...... 73-74 Központi elszívórendszerek felépítése
Szívó- és szűrőberendezések (közepes nyomású) A szűrőberendezés felépítése... 71 Intelligens szűréstechnika... 72 Elszívó- és szűrőberendezések részletei...... 73-74 Központi elszívórendszerek felépítése
52 523 03 0000 00 00 Mechatronikai műszerész Mechatronikai műszerész
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
MŰANYAG-FELDOLGOZÓ SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI
 MŰANYAG-FELDOLGOZÓ SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ ADATOK 1. A szakképesítés azonosító száma: 52 521 02 0000 00 00 2. A szakképesítés megnevezése: Műanyag-feldolgozó
MŰANYAG-FELDOLGOZÓ SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ ADATOK 1. A szakképesítés azonosító száma: 52 521 02 0000 00 00 2. A szakképesítés megnevezése: Műanyag-feldolgozó
Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések
 Záróvizsga orientáló kérdések") Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések 2015-2016. tanév 1. félévtől Összeállította: Dr. Németh István, Tóth András, Püspöki János Az orientáló kérdések célja
Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések 2015-2016. tanév 1. félévtől Összeállította: Dr. Németh István, Tóth András, Püspöki János Az orientáló kérdések célja
: 4440 Tiszavasvári, Petőfi út 1. : Tel.: 42/520-045; 520-046 Fax: 42/520-045 : Honlap: http://www.vpszk.sulinet.hu E-mail: vpkszk@vpkszk.sulinet.
 A T ii s z a v a s v á r ii K ö z é p ii s k o ll a,, S z a k ii s k o ll a é s K o ll ll é g ii u m P Á L Y A V Á L A S Z T Á S I T Á J É K O Z T A T Ó J A 2 0 1 3 / 1 4 NYÍÍLT NAP: : 20112 okttóbeerr
A T ii s z a v a s v á r ii K ö z é p ii s k o ll a,, S z a k ii s k o ll a é s K o ll ll é g ii u m P Á L Y A V Á L A S Z T Á S I T Á J É K O Z T A T Ó J A 2 0 1 3 / 1 4 NYÍÍLT NAP: : 20112 okttóbeerr
A SZAKMAI VIZSGÁK ELLENŐRZÉSI KÉZIKÖNYVÉNEK 6. SZAKMASPECIFIKUS FÜZETE Elektrotechnika-elektronika szakmacsoport
 A SZAKMAI VIZSGÁK ELLENŐRZÉSI KÉZIKÖNYVÉNEK 6. SZAKMASPECIFIKUS FÜZETE Elektrotechnika-elektronika szakmacsoport A képzés minőségének és tartalmának fejlesztése TÁMOP 2.2.1-08/1-2008-0002 3. Vizsgarendszer
A SZAKMAI VIZSGÁK ELLENŐRZÉSI KÉZIKÖNYVÉNEK 6. SZAKMASPECIFIKUS FÜZETE Elektrotechnika-elektronika szakmacsoport A képzés minőségének és tartalmának fejlesztése TÁMOP 2.2.1-08/1-2008-0002 3. Vizsgarendszer
NC technológia és programozás I.
 NC technológia és programozás I. Történeti áttekintés Hagyományos szerszámgépek (egyetemes szerszámgépek) Gépészmérnök szak Dr. Sipos Jenő főiskolai tanár 2 Történeti áttekintés Másoló gépek Gépészmérnök
NC technológia és programozás I. Történeti áttekintés Hagyományos szerszámgépek (egyetemes szerszámgépek) Gépészmérnök szak Dr. Sipos Jenő főiskolai tanár 2 Történeti áttekintés Másoló gépek Gépészmérnök
A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI MÉRNÖK KÉPZÉSBEN
 IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
Korszerű Diagnosztikai Módszerek
 Korszerű Diagnosztikai Módszerek Szabó József Zoltán Főiskolai adjunktus Mechatronikai és Autótechnikai Intézet Fszt. 29. 3. Előadás Rezgésmérés műszerek és módszerek A gépek rezgései A gépek nem merev
Korszerű Diagnosztikai Módszerek Szabó József Zoltán Főiskolai adjunktus Mechatronikai és Autótechnikai Intézet Fszt. 29. 3. Előadás Rezgésmérés műszerek és módszerek A gépek rezgései A gépek nem merev
(11) Lajstromszám: E 007 241 (13) T2 EURÓPAI SZABADALOM SZÖVEGÉNEK FORDÍTÁSA
 Lajstromszám: E 007 241 (13) T2 EURÓPAI SZABADALOM SZÖVEGÉNEK FORDÍTÁSA") !HU000007241T2! (19) HU (11) Lajstromszám: E 007 241 (13) T2 MAGYAR KÖZTÁRSASÁG Magyar Szabadalmi Hivatal EURÓPAI SZABADALOM SZÖVEGÉNEK FORDÍTÁSA (21) Magyar ügyszám: E 03 011411 (22) A bejelentés napja:
!HU000007241T2! (19) HU (11) Lajstromszám: E 007 241 (13) T2 MAGYAR KÖZTÁRSASÁG Magyar Szabadalmi Hivatal EURÓPAI SZABADALOM SZÖVEGÉNEK FORDÍTÁSA (21) Magyar ügyszám: E 03 011411 (22) A bejelentés napja:
Öko-technika. 5-8. évfolyam. Célok és feladatok. A tantárgy feladatai az 5-8. évfolyamokon. Szűcs Sándor Általános Iskola
 Öko-technika Az öko-technika integrált tantárgy, mely a technika és életvitel tárgyat veszi alapul, meghagyva ennek teljes követelményrendszerét kiegészítve a környezeti nevelés egy- egy kapcsolódó részterületével.
Öko-technika Az öko-technika integrált tantárgy, mely a technika és életvitel tárgyat veszi alapul, meghagyva ennek teljes követelményrendszerét kiegészítve a környezeti nevelés egy- egy kapcsolódó részterületével.
Forgácsoló gyártócellák, gyártórendszerek 2.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
AUTOMATIZÁLÁSI TECHNIKUS (ELEKTRONIKAI SZAKIRÁNY, GÉPIPARI SZAKIRÁNY) SZAKMAISMERTETŐ INFORMÁCIÓS MAPPA
 SZAKMAISMERTETŐ INFORMÁCIÓS MAPPA") AUTOMATIZÁLÁSI TECHNIKUS (ELEKTRONIKAI SZAKIRÁNY, GÉPIPARI SZAKIRÁNY) SZAKMAISMERTETŐ INFORMÁCIÓS MAPPA Humánerőforrás-fejlesztési Operatív Program (HEFOP) 1.2 intézkedés Az Állami Foglalkoztatási Szolgálat
AUTOMATIZÁLÁSI TECHNIKUS (ELEKTRONIKAI SZAKIRÁNY, GÉPIPARI SZAKIRÁNY) SZAKMAISMERTETŐ INFORMÁCIÓS MAPPA Humánerőforrás-fejlesztési Operatív Program (HEFOP) 1.2 intézkedés Az Állami Foglalkoztatási Szolgálat
A MMK Gépészeti Tagozathoz tartozó vezető szakértői szakterületek és az azokhoz tartozó tanúsítási részszakterületek
 A MMK Gépészeti Tagozathoz tartozó vezető szakértői szakterületek és az azokhoz tartozó tanúsítási részszakterületek 2. Melléklet G-C-V Kohászat-öntészet G-C 1. Koksz- és gázgyártás. [Dévényi] 2. Nyersvasgyártás,
A MMK Gépészeti Tagozathoz tartozó vezető szakértői szakterületek és az azokhoz tartozó tanúsítási részszakterületek 2. Melléklet G-C-V Kohászat-öntészet G-C 1. Koksz- és gázgyártás. [Dévényi] 2. Nyersvasgyártás,
MUNKAANYAG. Dabi Ágnes. A villamos ívhegesztés fajtái, berendezései, anyagai, segédanyagai, berendezésének alkalmazása
 Dabi Ágnes A villamos ívhegesztés fajtái, berendezései, anyagai, segédanyagai, berendezésének alkalmazása A követelménymodul megnevezése: Gépészeti kötési feladatok A követelménymodul száma: 0220-06 A
Dabi Ágnes A villamos ívhegesztés fajtái, berendezései, anyagai, segédanyagai, berendezésének alkalmazása A követelménymodul megnevezése: Gépészeti kötési feladatok A követelménymodul száma: 0220-06 A
Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése
 Üdvözlök mindenkit! Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése Bóka Jenő Óbudai Egyetem Kandó Kálmán Villamosmérnö Nappali tagozat, Szabályozott
Üdvözlök mindenkit! Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése Bóka Jenő Óbudai Egyetem Kandó Kálmán Villamosmérnö Nappali tagozat, Szabályozott
27/2012. (VIII. 27.) NGM rendelet. a nemzetgazdasági miniszter hatáskörébe tartozó szakképesítések szakmai és vizsgakövetelményeiről
 NGM rendelet. a nemzetgazdasági miniszter hatáskörébe tartozó szakképesítések szakmai és vizsgakövetelményeiről") 27/2012. (VIII. 27.) NGM rendelet a nemzetgazdasági miniszter hatáskörébe tartozó szakképesítések szakmai és vizsgakövetelményeiről A szakképzésről szóló 2011. évi CLXXXVII. törvény 90. a) pontjában kapott
27/2012. (VIII. 27.) NGM rendelet a nemzetgazdasági miniszter hatáskörébe tartozó szakképesítések szakmai és vizsgakövetelményeiről A szakképzésről szóló 2011. évi CLXXXVII. törvény 90. a) pontjában kapott
Épületgépészeti csőhálózat- és. 31 582 09 0010 31 03 Központifűtés- és csőhálózat-szerelő Épületgépészeti csőhálózat- és
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
CNC Robot Robomachine. M-2iA
 CNC Robot Robomachine M-2iA M-2iA/3S M-2iA/3SL Tartalom Bevezetés... 03 Főbb jellemzők... 04 Műszaki adatok... 05 Csuklóterhelési diagram Normál tehetetlenségű üzemmód... 06 Opció: nagy tehetetlenségű
CNC Robot Robomachine M-2iA M-2iA/3S M-2iA/3SL Tartalom Bevezetés... 03 Főbb jellemzők... 04 Műszaki adatok... 05 Csuklóterhelési diagram Normál tehetetlenségű üzemmód... 06 Opció: nagy tehetetlenségű
Újpesti Két Tanítási Nyelvű Műszaki Szakközépiskola, Szakiskola és Gimnázium
 Újpesti Két Tanítási Nyelvű Műszaki Szakközépiskola, Szakiskola és Gimnázium Oktatási azonosító: 035268 HELYI TANTERV Gépészet..SZAKMACSOPORT Gépgyártástechnológiai technikus..szakma OKJ SZÁMA: 54 521
Újpesti Két Tanítási Nyelvű Műszaki Szakközépiskola, Szakiskola és Gimnázium Oktatási azonosító: 035268 HELYI TANTERV Gépészet..SZAKMACSOPORT Gépgyártástechnológiai technikus..szakma OKJ SZÁMA: 54 521
Robotika és Gyártásautomatizálás
 TÁMOP-4.1.1.F-14/1/KONV-2015-0009 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Kovács György Robotika és Gyártásautomatizálás Pécs 2015 A tananyag
TÁMOP-4.1.1.F-14/1/KONV-2015-0009 A GÉPÉSZETI ÉS INFORMATIKAI ÁGAZATOK DUÁLIS ÉS MODULÁRIS KÉPZÉSEINEK KIALAKÍTÁSA A PÉCSI TUDOMÁNYEGYETEMEN Kovács György Robotika és Gyártásautomatizálás Pécs 2015 A tananyag
14.4. Elõtanulmány az Információs Hadviselésrõl Honvédelmi Minisztérium Elektronikai, Logisztikai és Vagyonkezelõ Rt: Jávor Endre (2000)
") 14.4. Elõtanulmány az Információs Hadviselésrõl Honvédelmi Minisztérium Elektronikai, Logisztikai és Vagyonkezelõ Rt: Jávor Endre (2000) Tartalomjegyzék 0.0. Bevezetés........................................
14.4. Elõtanulmány az Információs Hadviselésrõl Honvédelmi Minisztérium Elektronikai, Logisztikai és Vagyonkezelõ Rt: Jávor Endre (2000) Tartalomjegyzék 0.0. Bevezetés........................................
II. Automata váltó szeminárium
 AUTÓTECHNIKA II. Automata váltó szeminárium ŐRI PÉTER DR. NAGYSZOKOLYAI IVÁN A Laczkó és Társa automata váltó szerviz és együttműködő partnere, a holland Automatic Choice Europe 2015. február 2-án tartotta
AUTÓTECHNIKA II. Automata váltó szeminárium ŐRI PÉTER DR. NAGYSZOKOLYAI IVÁN A Laczkó és Társa automata váltó szerviz és együttműködő partnere, a holland Automatic Choice Europe 2015. február 2-án tartotta
Veszprémi Szakképzési Centrum Táncsics Mihály Szakközépiskolája, Szakiskolája és Kollégiuma
 Villamosipar és elektronika tanulmányi terület kódja: 025 Bejutáshoz szükséges: nyolc általános elvégzése központi írásbeli felvételi (a felvételnél ez 50%-ban számít be) erős közepes tanulmányi átlag
Villamosipar és elektronika tanulmányi terület kódja: 025 Bejutáshoz szükséges: nyolc általános elvégzése központi írásbeli felvételi (a felvételnél ez 50%-ban számít be) erős közepes tanulmányi átlag
Foglalkozási napló. Mechatronikus-karbantartó 15. évfolyam
 Foglalkozási napló a 20 /20. tanévre Mechatronikus-karbantartó 15. évfolyam (OKJ száma: 34 523 01) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Foglalkozási napló a 20 /20. tanévre Mechatronikus-karbantartó 15. évfolyam (OKJ száma: 34 523 01) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
GÉPELEMEK. k /V - Tóth Laboncz József. #tl' TANKÖNYVKIADÓ, BUDAPEST 1970 FELSŐFOKÚ ÉPÍTŐGÉPÉSZETI TECHNIKUM, DEBRECEN. '' 1 U x/i\ í.
 k /V - '' 1 U x/i\ í.-a/\ FELSŐFOKÚ ÉPÍTŐGÉPÉSZETI TECHNIKUM, DEBRECEN f ÉPÍTŐGÉPÉSZ SZAK " i av.v "4 - GÉPELEMEK I. összeállította: Tóth Laboncz József docens * #tl' QE r debseceh KÉZIRAT 16^8 56ÜÜ TANKÖNYVKIADÓ,
k /V - '' 1 U x/i\ í.-a/\ FELSŐFOKÚ ÉPÍTŐGÉPÉSZETI TECHNIKUM, DEBRECEN f ÉPÍTŐGÉPÉSZ SZAK " i av.v "4 - GÉPELEMEK I. összeállította: Tóth Laboncz József docens * #tl' QE r debseceh KÉZIRAT 16^8 56ÜÜ TANKÖNYVKIADÓ,
Sylvac Visio KÖNNYEN KEZELHETŐ OPTIKAI GÉPEK A SYLVAC TECHNIKAI SZAKÉRTELMÉVEL ÖSSZEHASONLÍTÓ CAD FUNKCIÓ HÁROM KÜLÖNBÖZŐ TÍPUSÚ MEGVILÁGÍTÁSSAL
 Precíziós mérőeszközök svájci gyártója 1969 óta Sylvac Visio VISION MÉRŐRENDSZEREK ÜZEMI ÉS LABORATÓRIUMI FELHASZNÁLÁSHOZ OPTIKAI GÉPEK A SYLVAC TECHNIKAI SZAKÉRTELMÉVEL SYLVAC VISIO 200 & 300 GL Robosztus
Precíziós mérőeszközök svájci gyártója 1969 óta Sylvac Visio VISION MÉRŐRENDSZEREK ÜZEMI ÉS LABORATÓRIUMI FELHASZNÁLÁSHOZ OPTIKAI GÉPEK A SYLVAC TECHNIKAI SZAKÉRTELMÉVEL SYLVAC VISIO 200 & 300 GL Robosztus
MŰANYAGOK FELDOLGOZÁSA
 MŰANYAGOK FELDOLGOZÁSA Fröccsöntés irányzatok és újdonságok Az európai műanyag-feldolgozók, gép- és vezérlésgyártók képviselői együtt vitatták meg a fröccsöntés fejlesztési lehetőségeit és az előrelépés
MŰANYAGOK FELDOLGOZÁSA Fröccsöntés irányzatok és újdonságok Az európai műanyag-feldolgozók, gép- és vezérlésgyártók képviselői együtt vitatták meg a fröccsöntés fejlesztési lehetőségeit és az előrelépés
Gépek biztonsági berendezéseinek csoportosítása, a kialakítás szabályai. A védőburkolatok fajtái, biztonságtechnikai követelményei.
 A munkaeszköz és a gép (mint technikai rendszer) definíciója, osztályozása az átalakítás jellege és az átalakítandó közeg szerint. A gép fogalma és jellegzetes veszélyforrásainak csoportosítása. A gép,
A munkaeszköz és a gép (mint technikai rendszer) definíciója, osztályozása az átalakítás jellege és az átalakítandó közeg szerint. A gép fogalma és jellegzetes veszélyforrásainak csoportosítása. A gép,
Forgácsoló gyártócellák, gyártórendszerek 1.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
PNEUMATIKA ALKALMAZÁSA A GÉPGYÁRTÁSBAN ÉS A GYÁRTÁSAUTOMATIZÁLÁSBAN Készüléktervezés - Szerelés
 PNEUMATIKA ALKALMAZÁSA A GÉPGYÁRTÁSBAN ÉS A GYÁRTÁSAUTOMATIZÁLÁSBAN Készüléktervezés - Szerelés Oktatási segédanyag 2009. Dr. Alpek Ferenc okl. gépész- és okl. villamosmérnök tud. főmunkatárs, honorary
PNEUMATIKA ALKALMAZÁSA A GÉPGYÁRTÁSBAN ÉS A GYÁRTÁSAUTOMATIZÁLÁSBAN Készüléktervezés - Szerelés Oktatási segédanyag 2009. Dr. Alpek Ferenc okl. gépész- és okl. villamosmérnök tud. főmunkatárs, honorary
31 521 11 0100 31 05 Hegesztő-vágó gép kezelője Hegesztő
 /07 (II. 27.) SzMM rendelettel módosított 1/06 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés, szakképesítés-elágazás,
/07 (II. 27.) SzMM rendelettel módosított 1/06 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés, szakképesítés-elágazás,
Mintaterv. PTE PMMIK - Tanulmányi tájékoztató 2012 - Gépipari mérnökasszisztens. Anyagtan és alkalmazások
 PTE PMMIK - Tanulmányi tájékoztató 0 - Gépipari mérnökasszisztens oldal / Mintaterv korszerű munkaszervezés Számítógépes és hálózati alapismeretek Felhasználói programok alkalmazása Környezet- és munkavédelem
PTE PMMIK - Tanulmányi tájékoztató 0 - Gépipari mérnökasszisztens oldal / Mintaterv korszerű munkaszervezés Számítógépes és hálózati alapismeretek Felhasználói programok alkalmazása Környezet- és munkavédelem
A vizsgafeladat ismertetése: Gyártósori gépbeállító feladatok ismeretanyag
 A vizsgafeladat ismertetése: Gyártósori gépbeállító feladatok ismeretanyag A tételhez segédeszköz nem használható. A feladatsor első részében található 1-20-ig számozott vizsgakérdéseket ki kell nyomtatni,
A vizsgafeladat ismertetése: Gyártósori gépbeállító feladatok ismeretanyag A tételhez segédeszköz nem használható. A feladatsor első részében található 1-20-ig számozott vizsgakérdéseket ki kell nyomtatni,
KÖSZÖNTJÜK HALLGATÓINKAT!
 KÖSZÖNTJÜK HALLGATÓINKAT! Önök Varjasi Norbert: A digitális forradalom a kvarcóráktól a zsebben hordott mobil irodáig előadását hallhatják! 2010. április 7. Kempelen Farkas: sakkozó automata (1769) 2 A
KÖSZÖNTJÜK HALLGATÓINKAT! Önök Varjasi Norbert: A digitális forradalom a kvarcóráktól a zsebben hordott mobil irodáig előadását hallhatják! 2010. április 7. Kempelen Farkas: sakkozó automata (1769) 2 A
41 Képző- és iparművészet
 1 / 17 41 Képző- és iparművészet A képzés a jelentkezők kis létszáma miatt nem indul. Sorrend Tanulóazonosító / jelige 77294174426 CSBARBI 71760645686 78958435017 78982456647 MAJA13 72294170188 71988820210
1 / 17 41 Képző- és iparművészet A képzés a jelentkezők kis létszáma miatt nem indul. Sorrend Tanulóazonosító / jelige 77294174426 CSBARBI 71760645686 78958435017 78982456647 MAJA13 72294170188 71988820210
Fogyasztói igényekhez alkalmazkodó gyártási stratégia
 SZERVEZETI FELÉPÍTÉS, SZERVEZÉSI MÓDSZEREK, VIRTUÁLIS VÁLLALATOK Fogyasztói igényekhez alkalmazkodó gyártási stratégia Melyek a fő különbségek a fogyasztói igényekhez alkalmazkodó gyártás és a sorozatgyártás
SZERVEZETI FELÉPÍTÉS, SZERVEZÉSI MÓDSZEREK, VIRTUÁLIS VÁLLALATOK Fogyasztói igényekhez alkalmazkodó gyártási stratégia Melyek a fő különbségek a fogyasztói igényekhez alkalmazkodó gyártás és a sorozatgyártás
Épületgépészeti csőhálózat- és. 31 582 09 0010 31 03 Központifűtés- és csőhálózat-szerelő Épületgépészeti csőhálózat- és
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
EPA 320 CNC eszterga Oktatási segédlet
 MISKOLCI EGYETEM SZERSZÁMGÉPEK TANSZÉKE EPA 320 CNC eszterga Oktatási segédlet Összeállította: Dr. Jakab Endre egyetemi docens Dr. Zsiga Zoltán foiskolai docens Miskolc, 2001 1. Általános ismerteto A bemutatandó
MISKOLCI EGYETEM SZERSZÁMGÉPEK TANSZÉKE EPA 320 CNC eszterga Oktatási segédlet Összeállította: Dr. Jakab Endre egyetemi docens Dr. Zsiga Zoltán foiskolai docens Miskolc, 2001 1. Általános ismerteto A bemutatandó
Ipari Robotok Programozása
 Ipari Robotok Programozása Vezérlő, StartUp, Szoftverszintek, programozási nyelvek Előadó: Nagy István n (A65) Gyakorlatvezető: : Tolnai András Ajánlott irodalom: B. Leatham-Jones: Elements of Industrial
Ipari Robotok Programozása Vezérlő, StartUp, Szoftverszintek, programozási nyelvek Előadó: Nagy István n (A65) Gyakorlatvezető: : Tolnai András Ajánlott irodalom: B. Leatham-Jones: Elements of Industrial
SZEMLE. Összeállította: BALOGH PÁL
 Összeállította: BALOGH PÁL Taiwanon 1973-ban több mint 4 millió db tv-készüléket gyártottak, ebből 600 edb színes berendezés voit. A belföldi képcsőgyárak az elmúlt évben 4,2 millió db fekete-fehér tv-képcsövet
Összeállította: BALOGH PÁL Taiwanon 1973-ban több mint 4 millió db tv-készüléket gyártottak, ebből 600 edb színes berendezés voit. A belföldi képcsőgyárak az elmúlt évben 4,2 millió db fekete-fehér tv-képcsövet
VÁLLALATI INFORMÁCIÓS RENDSZEREK, INTERNETES TECHNIKÁK
 VÁLLALATI INFORMÁCIÓS RENDSZEREK, INTERNETES TECHNIKÁK A digitális gyár mint a termékéletciklusmenedzsment megvalósításának központi eleme A termékéletciklus-menedzsment lényege az üzleti folyamatok olyan
VÁLLALATI INFORMÁCIÓS RENDSZEREK, INTERNETES TECHNIKÁK A digitális gyár mint a termékéletciklusmenedzsment megvalósításának központi eleme A termékéletciklus-menedzsment lényege az üzleti folyamatok olyan
80. ÉVFORDULÓS MITUTOYO AKCIÓ.
 Fizetés forintban 305 HUF/EUR árfolyaal számolva 1103 Budapest, Noszlopy u. 16/b. Tel: +36 1 260 30 30 FAX:+36 1 260 60 83 rendeles@uranusz.hu www.uranusz.hu Az akció 2014. április 1. és május 31. között
Fizetés forintban 305 HUF/EUR árfolyaal számolva 1103 Budapest, Noszlopy u. 16/b. Tel: +36 1 260 30 30 FAX:+36 1 260 60 83 rendeles@uranusz.hu www.uranusz.hu Az akció 2014. április 1. és május 31. között
A gyártási rendszerek áttekintése
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
AZ ALCA FALBA ÉPÍTHETŐ RENDSZEREK ÚJ KATALÓGUSA
 INFÓ AZ ALCA FALBA ÉPÍTHETŐ RENDSZEREK ÚJ KATALÓGUSA INFÓ Örömmel tájékoztassuk Önöket hogy kiadtuk az új ALCA falba építhető rendszerek katalógusát. Megtalálhatják benne a teljes falba építhető rendszer
INFÓ AZ ALCA FALBA ÉPÍTHETŐ RENDSZEREK ÚJ KATALÓGUSA INFÓ Örömmel tájékoztassuk Önöket hogy kiadtuk az új ALCA falba építhető rendszerek katalógusát. Megtalálhatják benne a teljes falba építhető rendszer
Robotok áttekintése. Robot fogalma:
 Robotok áttekintése Robot fogalma: A robot szó a szláv robota szóból ered és elsődleges jelentése rabszolgamunka. A köznyelv többféle értelemben használja a robot kifejezést. Ezek az értelmezések több
Robotok áttekintése Robot fogalma: A robot szó a szláv robota szóból ered és elsődleges jelentése rabszolgamunka. A köznyelv többféle értelemben használja a robot kifejezést. Ezek az értelmezések több
A MOTOMAN robotok története
 1977 Yasnac RB MOTOMAN-L10 1980 Yasnac RG 1983 MOTOMAN-L10W 1983 Yasnac RX 1985 MOTOMAN-L106 1988 Yasnac ERC MOTOMAN-K10S 1994 Yasnac MRC MOTOMAN-SK16 A MOTOMAN robotok története 1998 Motoman XRC MOTOMAN-UP20
1977 Yasnac RB MOTOMAN-L10 1980 Yasnac RG 1983 MOTOMAN-L10W 1983 Yasnac RX 1985 MOTOMAN-L106 1988 Yasnac ERC MOTOMAN-K10S 1994 Yasnac MRC MOTOMAN-SK16 A MOTOMAN robotok története 1998 Motoman XRC MOTOMAN-UP20
Alapképzés BSc Verzió: 2016-04-28
 1. Tárgy neve Munkavédelem 2. Tárgy angol neve Labour Safety 3. Tárgy rövid neve Munkavéd. 4. Tárgykód KOEAA111 5. Követelmény félévközi jegy 6. Kredit 2 7. Óraszám (levelező) 2 (7) előadás 0 (0) gyakorlat
1. Tárgy neve Munkavédelem 2. Tárgy angol neve Labour Safety 3. Tárgy rövid neve Munkavéd. 4. Tárgykód KOEAA111 5. Követelmény félévközi jegy 6. Kredit 2 7. Óraszám (levelező) 2 (7) előadás 0 (0) gyakorlat
Újdonság a Bosch termékválasztékában: Kormányrendszerek személyés haszongépjárművekhez
 Újdonság a Bosch termékválasztékában: Kormányrendszerek személyés haszongépjárművekhez Mindig biztonságosan az úton a Bosch kormányrendszereivel és komponenseivel Főbb alkalmazási Hidraulikus Elektromos
Újdonság a Bosch termékválasztékában: Kormányrendszerek személyés haszongépjárművekhez Mindig biztonságosan az úton a Bosch kormányrendszereivel és komponenseivel Főbb alkalmazási Hidraulikus Elektromos
Forgácsoló szerszámgépek
 Forgácsoló szerszámgépek Szerzık: Dr. Takács György Szilágyi Attila Demeter Péter Barak Antal Lektor: Dr. Molnár László Tartalomjegyzék 1 BEVEZETÉS...5 1.1 SZERSZÁMGÉP FOGALMA... 5 1.2 SZERSZÁMGÉPEK OSZTÁLYOZÁSA...
Forgácsoló szerszámgépek Szerzık: Dr. Takács György Szilágyi Attila Demeter Péter Barak Antal Lektor: Dr. Molnár László Tartalomjegyzék 1 BEVEZETÉS...5 1.1 SZERSZÁMGÉP FOGALMA... 5 1.2 SZERSZÁMGÉPEK OSZTÁLYOZÁSA...
Elıadás a Pannon Egyetem Kihívások a mőszaki szakemberképzésben címő fórum alkalmából kivonat
 Elıadás a Pannon Egyetem Kihívások a mőszaki szakemberképzésben címő fórum alkalmából kivonat Elıadó: Pápai Tamás ügyvezetı igazgató Continental Teves Magyarország Kft. 2009. február 9. Fontosabb adatok
Elıadás a Pannon Egyetem Kihívások a mőszaki szakemberképzésben címő fórum alkalmából kivonat Elıadó: Pápai Tamás ügyvezetı igazgató Continental Teves Magyarország Kft. 2009. február 9. Fontosabb adatok
[ ] Kimagasló teljesítmény sorozatgyártáshoz. HYPERTURN 45. E[M]CONOMY jelentése:
![[ ] Kimagasló teljesítmény sorozatgyártáshoz. HYPERTURN 45. E[M]CONOMY jelentése:](/thumbs/38/17850036.jpg "[ ] Kimagasló teljesítmény sorozatgyártáshoz. HYPERTURN 45. E[M]CONOMY jelentése:") [ ] E[M]CONOMY jelentése: Kimagasló teljesítmény sorozatgyártáshoz. HYPERTURN 45 Nagyteljesítményű forgácsoló központ komplett esztergálási megmunkálásokhoz HYPERTURN 45 [Y-tengely] [Felső szerszám rendszer]
[ ] E[M]CONOMY jelentése: Kimagasló teljesítmény sorozatgyártáshoz. HYPERTURN 45 Nagyteljesítményű forgácsoló központ komplett esztergálási megmunkálásokhoz HYPERTURN 45 [Y-tengely] [Felső szerszám rendszer]
III. BÉLA SZAKKÉPZŐ ISKOLA ÉS KOLLÉGIUM HELYI TANTERV ELEKTROTECHNIKA-ELEKTRONIKA SZAKMACSOPORT AUTOMATIKAI TECHNIKUS
 III. ÉLA SZAKKÉPZŐ ISKOLA ÉS KOLLÉGIUM HELYI TANTERV ELEKTROTECHNIKA-ELEKTRONIKA SZAKMACSOPORT AUTOMATIKAI TECHNIKUS 54 523 04 1000 00 00 K é s z ü l t : Az 17723-2/2011. VIII. 25. k ö z l e m é n yb e
III. ÉLA SZAKKÉPZŐ ISKOLA ÉS KOLLÉGIUM HELYI TANTERV ELEKTROTECHNIKA-ELEKTRONIKA SZAKMACSOPORT AUTOMATIKAI TECHNIKUS 54 523 04 1000 00 00 K é s z ü l t : Az 17723-2/2011. VIII. 25. k ö z l e m é n yb e
Az EuroProt készülékcsalád
 EuroProt rendszerismertető Az EuroProt készülékcsalád A Protecta Elektronikai Kft. EuroProt készülékcsaládja azzal a céllal készült, hogy tagjai a villamosenergia rendszer valamennyi védelmi és automatika
EuroProt rendszerismertető Az EuroProt készülékcsalád A Protecta Elektronikai Kft. EuroProt készülékcsaládja azzal a céllal készült, hogy tagjai a villamosenergia rendszer valamennyi védelmi és automatika
Baross Gábor Középiskola, Szakiskola és Kollégium
 Baross Gábor Középiskola, Szakiskola és Kollégium 031242 HELYI TANTERV AZ ELŐREHOZOTT, 3 ÉVES SZAKKÉPZÉSHEZ Gépészet..SZAKMACSOPORT Gépi forgácsoló..szakma OKJ SZÁMA: 31 521 09 1000 00 00 ÉRVÉNYES: 2012.
Baross Gábor Középiskola, Szakiskola és Kollégium 031242 HELYI TANTERV AZ ELŐREHOZOTT, 3 ÉVES SZAKKÉPZÉSHEZ Gépészet..SZAKMACSOPORT Gépi forgácsoló..szakma OKJ SZÁMA: 31 521 09 1000 00 00 ÉRVÉNYES: 2012.
MUNKAERŐPIACI HELYZETKÉP KECSKEMÉT MUNKAERŐPIACI KÖRZETBEN 2010. október
 Dél-alföldi Regionális Munkaügyi Központ MUNKAERŐPIACI HELYZETKÉP KECSKEMÉT MUNKAERŐPIACI KÖRZETBEN 2010. október Kecskemét, 2010. november Készült A DÉL-ALFÖLDI REGIONÁLIS MUNKAÜGYI KÖZPONT ELEMZÉSI,
Dél-alföldi Regionális Munkaügyi Központ MUNKAERŐPIACI HELYZETKÉP KECSKEMÉT MUNKAERŐPIACI KÖRZETBEN 2010. október Kecskemét, 2010. november Készült A DÉL-ALFÖLDI REGIONÁLIS MUNKAÜGYI KÖZPONT ELEMZÉSI,
ÉPÍTŐ- ÉS ANYAGMOZGATÓ-GÉPÉSZ TECHNIKUS SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI
 ÉPÍTŐ- ÉS ANYAGMOZGATÓ-GÉPÉSZ TECHNIKUS SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ ADATOK 1. A szakképesítés azonosító száma: 54 525 01 0000 00 00 2. A szakképesítés
ÉPÍTŐ- ÉS ANYAGMOZGATÓ-GÉPÉSZ TECHNIKUS SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ ADATOK 1. A szakképesítés azonosító száma: 54 525 01 0000 00 00 2. A szakképesítés
a NAT-6-0035/2006 számú akkreditálási ügyirathoz
 Nemzeti Akkreditáló Testület KIEGÉSZÍTÕ RÉSZLETEZÕ OKIRAT a NAT-6-0035/2006 számú akkreditálási ügyirathoz A Magyar Elektrotechnikai Ellenõrzõ Intézet Kft. (1132 Budapest, Váci út 48/a-b) akkreditált mûszaki
Nemzeti Akkreditáló Testület KIEGÉSZÍTÕ RÉSZLETEZÕ OKIRAT a NAT-6-0035/2006 számú akkreditálási ügyirathoz A Magyar Elektrotechnikai Ellenõrzõ Intézet Kft. (1132 Budapest, Váci út 48/a-b) akkreditált mûszaki
TANTÁRGYLEÍRÁS. OKJ azonosító 01/1.0/1180-06 Tantárgy kódja Meghirdetés féléve 1. Kreditpont 2 Heti kontakt óraszám (elm.+gyak.
 Informatika alapok OKJ azonosító 01/1.0/1180-06 MC1101 Meghirdetés féléve 1. Kreditpont 2 Heti kontakt óraszám (elm.+gyak.) 0+2 Tantárgyfelelős neve és beosztása Ferenczi Ildikó mérnöktanár Számítógépet
Informatika alapok OKJ azonosító 01/1.0/1180-06 MC1101 Meghirdetés féléve 1. Kreditpont 2 Heti kontakt óraszám (elm.+gyak.) 0+2 Tantárgyfelelős neve és beosztása Ferenczi Ildikó mérnöktanár Számítógépet
Baross Gábor Középiskola, Szakiskola és Kollégium
 Baross Gábor Középiskola, Szakiskola és Kollégium 031242 HELYI TANTERV A MODERN, ELŐREHOZOTT, 3 ÉVES SZAKKÉPZÉSHEZ Gépészet..SZAKMACSOPORT Szerkezetlakatos..SZAKMA OKJ SZÁMA:31 521 24 1000 00 00 ÉRVÉNYES:
Baross Gábor Középiskola, Szakiskola és Kollégium 031242 HELYI TANTERV A MODERN, ELŐREHOZOTT, 3 ÉVES SZAKKÉPZÉSHEZ Gépészet..SZAKMACSOPORT Szerkezetlakatos..SZAKMA OKJ SZÁMA:31 521 24 1000 00 00 ÉRVÉNYES:
KÖZLEKEDÉSAUTOMATIKAI MŰSZERÉSZ SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI
 KÖZLEKEDÉSUTOMTIKI MŰSZERÉSZ SZKKÉPESÍTÉS SZKMI ÉS VIZSGKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ DTOK 1. szakképesítés azonosító száma: 52 523 02 1000 00 00 2. szakképesítés megnevezése: Közlekedésautomatikai
KÖZLEKEDÉSUTOMTIKI MŰSZERÉSZ SZKKÉPESÍTÉS SZKMI ÉS VIZSGKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ DTOK 1. szakképesítés azonosító száma: 52 523 02 1000 00 00 2. szakképesítés megnevezése: Közlekedésautomatikai

Dobránczky János. Hegesztés. 60 percig fog hegeszteni MINDENKI gyakorlaton, pontos érkezés elvárt. A hegesztés egy alakadási technika.
 Dobránczky János Hegesztés 60 percig fog hegeszteni MINDENKI gyakorlaton, pontos érkezés elvárt. A hegesztés egy alakadási technika. Alakadási lehetőségek: öntés, porkohászat, képlékeny alakítás, forgácsolás,
Dobránczky János Hegesztés 60 percig fog hegeszteni MINDENKI gyakorlaton, pontos érkezés elvárt. A hegesztés egy alakadási technika. Alakadási lehetőségek: öntés, porkohászat, képlékeny alakítás, forgácsolás,
Tárgyszavak: textil; intelligens textil; lélegző szöveg; fázisváltó anyag; formatartó anyag; divat; elektronika; egészségvédelem; festék.
 MINDENNAPI ÉLETÜNK Intelligens textilanyagok Tárgyszavak: textil; intelligens textil; lélegző szöveg; fázisváltó anyag; formatartó anyag; divat; elektronika; egészségvédelem; festék. Az intelligens textília
MINDENNAPI ÉLETÜNK Intelligens textilanyagok Tárgyszavak: textil; intelligens textil; lélegző szöveg; fázisváltó anyag; formatartó anyag; divat; elektronika; egészségvédelem; festék. Az intelligens textília
DREHMO Matic C elektromechanikus hajtások
 DREHMO Matic C elektromechanikus hajtások ALKALMAZÁS A többfordulatú hajtóművek tervezési elve az, hogy a kimeneti kihajtó tengelyek 360 -os fordulatot tegyenek. A DREHMO többfordulatú hajtóműveket 2-1450
DREHMO Matic C elektromechanikus hajtások ALKALMAZÁS A többfordulatú hajtóművek tervezési elve az, hogy a kimeneti kihajtó tengelyek 360 -os fordulatot tegyenek. A DREHMO többfordulatú hajtóműveket 2-1450
Tervezte és készítette Géczy László 1999-2000
 Tervezte és készítette Géczy László 1999-2000 Az adatok elhelyezkedése az adathordozók felületén mágneses író-olvasó fej sávok lemezek A lemezek közötti karok két fejet tartanak cilinder az egymás fölött
Tervezte és készítette Géczy László 1999-2000 Az adatok elhelyezkedése az adathordozók felületén mágneses író-olvasó fej sávok lemezek A lemezek közötti karok két fejet tartanak cilinder az egymás fölött
Tartalomjegyzék. Közelítéskapcsolók és helyzet jeladók. Áramlásérzékelők. Nyomáskapcsolók, nyomásés vákuum érzékelők
 Érzékelők 1 2 A cég hitvallása: a Festo legyen az automatizálástechnika vezető konszernje, amely vevőivel szoros partneri viszonyban, az automatizálás technikában a legmagasabb színvonalú kompetenciával
Érzékelők 1 2 A cég hitvallása: a Festo legyen az automatizálástechnika vezető konszernje, amely vevőivel szoros partneri viszonyban, az automatizálás technikában a legmagasabb színvonalú kompetenciával
MŰANYAGOK FELDOLGOZÁSA
 MŰANYAGOK FELDOLGOZÁSA Etázsszerszámok előnyei A termelékenység növelésének egyik lehetséges módja az etázsszerszámok alkalmazása a fröccsgépen, amelyekkel a záróerő emelése nélkül majdnem megduplázható
MŰANYAGOK FELDOLGOZÁSA Etázsszerszámok előnyei A termelékenység növelésének egyik lehetséges módja az etázsszerszámok alkalmazása a fröccsgépen, amelyekkel a záróerő emelése nélkül majdnem megduplázható
Szervizrobotok. Bevezetés
 Dr. Mester Gyula Szervizrobotok Bevezetés A robot fogalmát a Nemzetközi Szabványügyi Hivatal (ISO Manipulating Robots, ISO8373:1996) a következő módon állapítja meg: A robot automatikusan vezérelt, újra
Dr. Mester Gyula Szervizrobotok Bevezetés A robot fogalmát a Nemzetközi Szabványügyi Hivatal (ISO Manipulating Robots, ISO8373:1996) a következő módon állapítja meg: A robot automatikusan vezérelt, újra
LUX INTELLIGENCE. ERŐS és INTELLIGENS. 1901 óta
 LUX INTELLIGENCE ERŐS és INTELLIGENS 1901 óta MINDENKI SZEMBESÜL OTTHONÁBAN A SZŐNYEGEK, JÁRÓLAPOK, FAPADLÓK, ÁGYBETÉTEK ÉS KANAPÉK TISZTÍTÁSÁNAK ELTÉRŐ KÖVETELMÉNYEIVEL. A LUX INTELLIGENS MEGOLDÁST KÍNÁL!
LUX INTELLIGENCE ERŐS és INTELLIGENS 1901 óta MINDENKI SZEMBESÜL OTTHONÁBAN A SZŐNYEGEK, JÁRÓLAPOK, FAPADLÓK, ÁGYBETÉTEK ÉS KANAPÉK TISZTÍTÁSÁNAK ELTÉRŐ KÖVETELMÉNYEIVEL. A LUX INTELLIGENS MEGOLDÁST KÍNÁL!
Robottechnika. 2. Ipari robotok. Ballagi Áron Automatizálási Tanszék
 Robottechnika 2. Ipari robotok Ballagi Áron Automatizálási Tanszék IGM látogatás, oktatás IGM Robotrendszerek Kft. Hegesztőrobotok specialistája http://www.igm-group.com/hu Max. 8 fő! akiket tényleg érdekel
Robottechnika 2. Ipari robotok Ballagi Áron Automatizálási Tanszék IGM látogatás, oktatás IGM Robotrendszerek Kft. Hegesztőrobotok specialistája http://www.igm-group.com/hu Max. 8 fő! akiket tényleg érdekel
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
31 543 01 0000 00 00 Finomkerámiagyártó gép kezelője
 A /2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A /2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
Vákuumos megfogó- és emelıberendezések
 Anyagmozgatás gépei Vákuumos megfogó- és emelıberendezések Andó Mátyás Gépészmérnöki Kar Okleveles gépészmérnöki szak IV. évfolyam 2. kurzus Budapest, 2005. október 22. Tartalomjegyzék VÁKUUMMAL KAPCSOLATOS
Anyagmozgatás gépei Vákuumos megfogó- és emelıberendezések Andó Mátyás Gépészmérnöki Kar Okleveles gépészmérnöki szak IV. évfolyam 2. kurzus Budapest, 2005. október 22. Tartalomjegyzék VÁKUUMMAL KAPCSOLATOS
139/2008. (X. 22.) FVM rendelet
 FVM rendelet") 1 139/2008. (X. 22.) FVM rendelet az Európai Mezőgazdasági Vidékfejlesztési Alapból az Új Magyarország Vidékfejlesztési Program I. és II. intézkedéscsoportjához kapcsolódó képzések tárgyában nyújtandó
1 139/2008. (X. 22.) FVM rendelet az Európai Mezőgazdasági Vidékfejlesztési Alapból az Új Magyarország Vidékfejlesztési Program I. és II. intézkedéscsoportjához kapcsolódó képzések tárgyában nyújtandó