Intelligens Rendszerek
|
|
|
- Ágoston Gál
- 7 évvel ezelőtt
- Látták:
Átírás
1 Intelligens Rendszerek Robotok


2

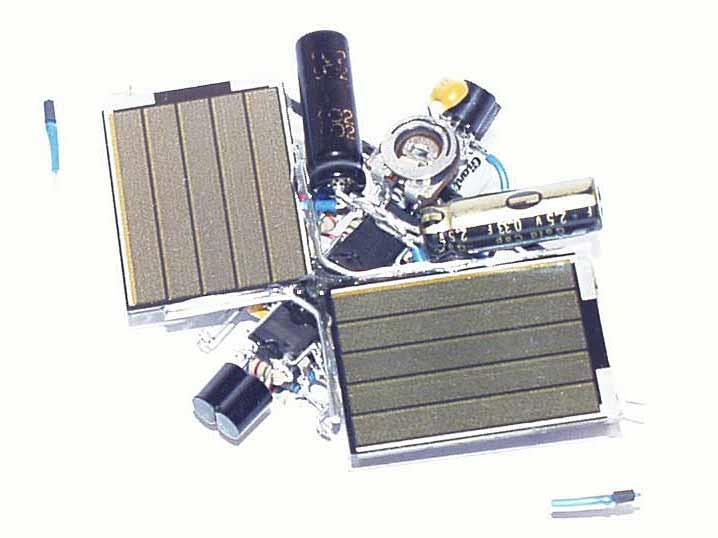
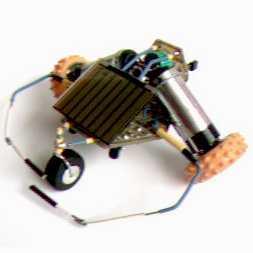
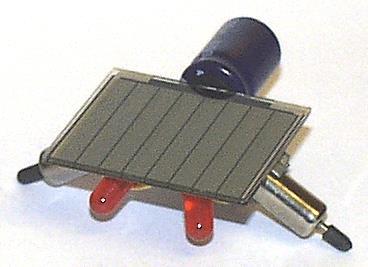

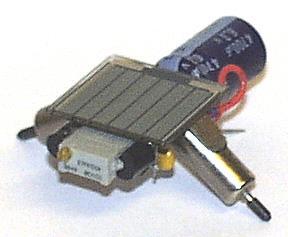



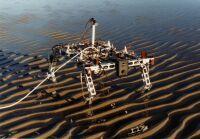
3 B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák. BEAM robotok


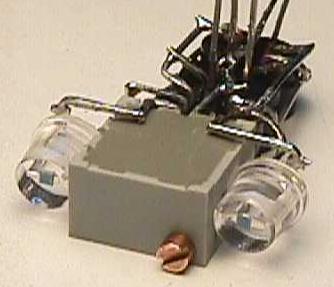


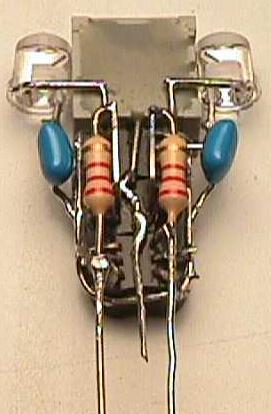
4 B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák. BEAM robotok
5 Robot vagy automata? Mi a különbség automaták és robotok közt? Automaták Robotok Programozhatóság + + Érzékelők + + Írható/olvasható memória - + Adaptációs képesség - + Tanulási képesség - +








6 Robotok felhasználási példái Űrkutatás Űrszondák Leszálló egységek Mobil bolygókutató egységek Ipari robotok Összeszerelő robotok Hegesztő Szerelő Festő Megmunkáló robotok Karbantartó robotok Katasztrófaelhárító robotok Tűzoltó robotok Felderítő robotok (vegyi vagy sugár szennyezet területen) Katonai Robotok Akna felkutató, megsemmisítő robotok

7 Robotok felhasználási példái
8 Szenzorok
9 Infrareflexiós szenzor: Gyors és könnyű feldolgozás (van akadály / nincs akadály) Ultrahangos / Lézeres távolságmérő hasonló, mint az infrareflexiós, akadály távolságát adja meg, ha van Szenzorok
10 Infrareflexiós szenzor: Gyors és könnyű feldolgozás (van akadály / nincs akadály) Ultrahangos / Lézeres távolságmérő hasonló, mint az infrareflexiós, akadály távolságát adja meg, ha van Szenzorok
11 Szenzorok Infrareflexiós szenzor: Gyors és könnyű feldolgozás (van akadály / nincs akadály) Ultrahangos / Lézeres távolságmérő hasonló, mint az infrareflexiós, akadály távolságát adja meg, ha van Kamera Nagy mennyiségű információ (min. 640x480x8 bit) Képfeldolgozás Lassú, bonyolult, nagy számítási igényű Részletes információ az akadályra vonatkozóan
12 Szenzorok Infrareflexiós szenzor: Gyors és könnyű feldolgozás (van akadály / nincs akadály) Ultrahangos / Lézeres távolságmérő hasonló, mint az infrareflexiós, akadály távolságát adja meg, ha van Kamera Nagy mennyiségű információ (min. 640x480x8 bit) Képfeldolgozás Lassú, bonyolult, nagy számítási igényű Részletes információ az akadályra vonatkozóan
13 Szenzorok Infrareflexiós szenzor: Gyors és könnyű feldolgozás (van akadály / nincs akadály) Ultrahangos / Lézeres távolságmérő hasonló, mint az infrareflexiós, akadály távolságát adja meg, ha van Kamera Nagy mennyiségű információ (min. 640x480x8 bit) Képfeldolgozás Lassú, bonyolult, nagy számítási igényű Részletes információ az akadályra vonatkozóan 360 kamera Torzítás, nagyobb lefedett terület -> kevesebb információ
14 Szenzorok Szenzorok típusai: Passzív A passzív szenzorok a környezet fizikai jellemzőit érzékelik, pl.: Hőmérséklet Nyomás Fény Hang



15 Szenzorok Szenzorok típusai: Passzív A passzív szenzorok a környezet fizikai jellemzőit érzékelik, pl.: Hőmérséklet Nyomás Fény Hang Aktív Az aktív szenzorok működésük során maguk bocsátanak ki mérő jelet, mely visszaverődését érzékelik. Ilyenek például: Radarok Megvilágítást igénylő fényérzékelők, kamerák Ultrahangos, lézeres távolságmérők
16 Szenzorok
17 Szenzorok Struktúrált fény Kivetített minta (pl. lézercsík) A minta deformálódásából meg lehet mondani az akadály távolságát ~Kinect

18 Szenzorok



19 Szenzorok Szenzorok típusai: Passzív A passzív szenzorok a környezet fizikai jellemzőit érzékelik, pl.: Hőmérséklet Nyomás Fény Hang Aktív Az aktív szenzorok működésük során maguk bocsátanak ki mérő jelet, mely visszaverődését érzékelik. Ilyenek például: Radarok Megvilágítást igénylő fényérzékelők, kamerák Ultrahangos, lézeres távolságmérők
20 Az intelligens szenzorok jellemzői: Önkalibráció Öndiagnosztika Dinamikus érzékenység Programozhatóság, távvezérelhetőség Intelligens szenzorok
21 Navigáció A navigáció feladata, hogy a robot egy kijelölt célpozícióba jusson. A mozgás során több szempontot is figyelembe kell venni: A robot mozgási lehetőségei A mozgásra fordított energiaszükséglet Idő Robot mechanikai tulajdonságai Terepviszonyok Ismert / ismeretlen terep
22 Navigáció Akadályelkerülés és pályatervezés szabályalapú algoritmus módosított szabályalapú algoritmus neurális-elvű algoritmus tapasztalat szerzésen alapuló algoritmus hullám-továbbterjesztéses algoritmus módosított hullám-továbbterjesztéses algoritmus GVD-elvű, gráfbejáráson alapuló algoritmus

23 Különböző algoritmusok összehasonlítása Navigáció
B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák.
 Robotok B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák. B Biology Biológiai mintára készített, E Electronics
Robotok B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett, A Aesthetics esztétikusan kivitelezett, M Mechanics mechanikák. B Biology Biológiai mintára készített, E Electronics
A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA
 infokommunikációs technológiák A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA Heckl István Projektzáró rendezvény Veszprém, 2015. június 22. TARTALOM I.1 Felhő
infokommunikációs technológiák A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA Heckl István Projektzáró rendezvény Veszprém, 2015. június 22. TARTALOM I.1 Felhő
Robotika. Alapfogalmak. Robotok. Robot vagy automata. Robotok típusai. Robotok alkalmazási területei
 Robotika Alapfogalmak Robot Köznyelvi meghatározása: A robot (a szláv robota a.m. szolgaság, munka szóból) elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására.
Robotika Alapfogalmak Robot Köznyelvi meghatározása: A robot (a szláv robota a.m. szolgaság, munka szóból) elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására.
Hiszterézis: Egy rendszer kimenete nem csak az aktuális állapottól függ, hanem az állapotváltozás aktuális irányától is.
 1. Mi az érzékelő? Definiálja a típusait (belső/külső). Mit jelent a hiszterézis? Miért nem tudunk közvetlenül mérni, miért származtatunk? Hogyan kapcsolódik össze az érzékelés és a becslés a mérések során?
1. Mi az érzékelő? Definiálja a típusait (belső/külső). Mit jelent a hiszterézis? Miért nem tudunk közvetlenül mérni, miért származtatunk? Hogyan kapcsolódik össze az érzékelés és a becslés a mérések során?
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei
 Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Informatika a valós világban: a számítógépek és környezetünk kapcsolódási lehetőségei Dr. Gingl Zoltán SZTE, Kísérleti Fizikai Tanszék Szeged, 2000 Február e-mail : gingl@physx.u-szeged.hu 1 Az ember kapcsolata
Intelligens beágyazott rendszer üvegházak irányításában
 P5-T6: Algoritmustervezési környezet kidolgozása intelligens autonóm rendszerekhez Intelligens beágyazott rendszer üvegházak irányításában Eredics Péter, Dobrowiecki P. Tadeusz, BME-MIT 1 Üvegházak Az
P5-T6: Algoritmustervezési környezet kidolgozása intelligens autonóm rendszerekhez Intelligens beágyazott rendszer üvegházak irányításában Eredics Péter, Dobrowiecki P. Tadeusz, BME-MIT 1 Üvegházak Az

Intelligens Rendszerek Elmélete. Versengéses és önszervező tanulás neurális hálózatokban
 Intelligens Rendszerek Elmélete : dr. Kutor László Versengéses és önszervező tanulás neurális hálózatokban http://mobil.nik.bmf.hu/tantargyak/ire.html Login név: ire jelszó: IRE07 IRE 9/1 Processzor Versengéses
Intelligens Rendszerek Elmélete : dr. Kutor László Versengéses és önszervező tanulás neurális hálózatokban http://mobil.nik.bmf.hu/tantargyak/ire.html Login név: ire jelszó: IRE07 IRE 9/1 Processzor Versengéses
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
Zárójelentés. Az autonóm mobil eszközök felhasználási területei, irányítási módszerek
 Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
Zárójelentés Az autonóm mobil eszközök felhasználási területei, irányítási módszerek Az autonóm mobil robotok elterjedése növekedést mutat napjainkban az egész hétköznapi felhasználástól kezdve az ember
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Gyakorlatok. VITMMA09 Okos város MSc mellékspecializáció
 Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
Gyakorlatok VITMMA09 Okos város MSc mellékspecializáció ITS gyakorlatok Cél Gyakorlati tudással kiegészíteni az elméleti ismereteket Példák a való világból, korlátozott de valósághű környezetben Tervezés,
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA. 1. előadás. Dr. Pintér József. Robottechnika
 ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
1. Mozgás Magyar Attila
 1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
Vezető nélküli targoncák munkavédelmi kérdései Együtt működni! Péterffy Gábor Siófok,
 Együtt működni! Péterffy Gábor Siófok, 2018. 05. 18 Együtt működni! 1. Mi az az AGV? a. Megvezetés, tájékozódás b. Biztonsági berendezések, érzékelők. 2. A vezető nélküli targoncákra vonatkozó szabályok
Együtt működni! Péterffy Gábor Siófok, 2018. 05. 18 Együtt működni! 1. Mi az az AGV? a. Megvezetés, tájékozódás b. Biztonsági berendezések, érzékelők. 2. A vezető nélküli targoncákra vonatkozó szabályok
Bevezetés. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
HU Egyesülve a sokféleségben HU A8-0005/4. Módosítás
 8.2.2017 A8-0005/4 4 Jean-Luc Schaffhauser 1 bekezdés felszólítja a Bizottságot, hogy tegyen javaslatot a kiberfizikai rendszerek, az autonóm rendszerek, az intelligens autonóm robotok és alkategóriáik
8.2.2017 A8-0005/4 4 Jean-Luc Schaffhauser 1 bekezdés felszólítja a Bizottságot, hogy tegyen javaslatot a kiberfizikai rendszerek, az autonóm rendszerek, az intelligens autonóm robotok és alkategóriáik
Korszerű mérőeszközök alkalmazása a gépszerkezettan oktatásában
 Korszerű mérőeszközök alkalmazása a gépszerkezettan oktatásában Dr. Kátai László, tanszékvezető, egyetemi docens Mechanikai és Géptani Intézet Gépszerkezettan Tanszék Bevezetés Gépszerkezettan a tantervben
Korszerű mérőeszközök alkalmazása a gépszerkezettan oktatásában Dr. Kátai László, tanszékvezető, egyetemi docens Mechanikai és Géptani Intézet Gépszerkezettan Tanszék Bevezetés Gépszerkezettan a tantervben
Paksi I. István Szakképző Iskola Ideiglenes felvételi jegyzék 2015/2016
 Szakközépiskola 77595242289 64 1. felvételre javasolt 71770970787 63 2. felvételre javasolt 72418673860 52 3. felvételre javasolt 74659368334 51 4. felvételre javasolt 74845323873 49 5. felvételre javasolt
Szakközépiskola 77595242289 64 1. felvételre javasolt 71770970787 63 2. felvételre javasolt 72418673860 52 3. felvételre javasolt 74659368334 51 4. felvételre javasolt 74845323873 49 5. felvételre javasolt
6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu. Gyakorló feladatok
 BÁNYAI JÚLIA GIMNÁZIUM 6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu Gyakorló feladatok I. LEGO Robotprogramozó országos csapatversenyre A következő
BÁNYAI JÚLIA GIMNÁZIUM 6000 Kecskemét Nyíri út 11. Telefon: 76/481-474; Fax: 76/486-942 bjg@pr.hu www.banyai-kkt.sulinet.hu Gyakorló feladatok I. LEGO Robotprogramozó országos csapatversenyre A következő
Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához
 1 Nemzeti Workshop Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához Berczeli Attila Campden BRI Magyarország
1 Nemzeti Workshop Kísérleti üzemek az élelmiszeriparban alkalmazható fejlett gépgyártás-technológiai megoldások kifejlesztéséhez, kipróbálásához és oktatásához Berczeli Attila Campden BRI Magyarország
HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL
 HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL Balog Viktor, Szolnok, 2018 AZ ELŐADÁS TARTALMA Cég bemutatása A hegesztés automatizálás fontossága A hegesztés automatizálás (célgépes és robotos alkalmazások)
HEGESZTÉS AUTOMATIZÁLÁS A STADLER SZOLNOK KFT-NÉL Balog Viktor, Szolnok, 2018 AZ ELŐADÁS TARTALMA Cég bemutatása A hegesztés automatizálás fontossága A hegesztés automatizálás (célgépes és robotos alkalmazások)
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
nagyoknak kicsiknek SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE
 SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA nagyoknak kicsiknek BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE TUDOMÁNY ÉS TECHNIKA Egyszerű és meghajtott gépek Tudomány Műveltség Matek Kommunikáció
SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA nagyoknak kicsiknek BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE TUDOMÁNY ÉS TECHNIKA Egyszerű és meghajtott gépek Tudomány Műveltség Matek Kommunikáció
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Dunaújvárosi Főiskola Informatikai Intézet. Intelligens ágensek. Dr. Seebauer Márta. főiskolai tanár
 Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Gyártórendszerek fejlődésének fázisai
 Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Magyarország-Budapest: Mérőműszerek 2015/S 155-285305. (Kiegészítés az Európai Unió Hivatalos Lapjához, 3.7.2015, 2015/S 126-230062)
") 1/9 Ez a hirdetmény a TED weboldalán: http://ted.europa.eu/udl?uri=ted:notice:285305-2015:text:hu:html Magyarország-Budapest: Mérőműszerek 2015/S 155-285305 Országos Vízügyi Főigazgatóság, AK08474, Márvány
1/9 Ez a hirdetmény a TED weboldalán: http://ted.europa.eu/udl?uri=ted:notice:285305-2015:text:hu:html Magyarország-Budapest: Mérőműszerek 2015/S 155-285305 Országos Vízügyi Főigazgatóság, AK08474, Márvány
Felhasználói kézikönyv
 Felhasználói kézikönyv 3060 Lézeres távolságmérő TARTALOMJEGYZÉK ELEM CSERÉJE... 3 A KÉSZÜLÉK FELÉPÍTÉSE... 3 A KIJELZŐ FELÉPÍTÉSE... 3 MŰSZAKI JELLEMZŐK... 4 LÉZERES CÉLZÓ BEKAPCSOLÁSA... 4 MÉRÉSI TÁVOLSÁG...
Felhasználói kézikönyv 3060 Lézeres távolságmérő TARTALOMJEGYZÉK ELEM CSERÉJE... 3 A KÉSZÜLÉK FELÉPÍTÉSE... 3 A KIJELZŐ FELÉPÍTÉSE... 3 MŰSZAKI JELLEMZŐK... 4 LÉZERES CÉLZÓ BEKAPCSOLÁSA... 4 MÉRÉSI TÁVOLSÁG...
EGYEDI TRAFFIPAXVÉDELMI MEGOLDÁSOK
 EGYEDI TRAFFIPAXVÉDELMI MEGOLDÁSOK Aktív traffipaxvédelem a mobil mérések ellen Magyarországon a mobil mérőeszközök lézeres elven állapítják meg a jármű sebességét. Ahogy a rendőr rálő az autóra, azonnal
EGYEDI TRAFFIPAXVÉDELMI MEGOLDÁSOK Aktív traffipaxvédelem a mobil mérések ellen Magyarországon a mobil mérőeszközök lézeres elven állapítják meg a jármű sebességét. Ahogy a rendőr rálő az autóra, azonnal
A LEGO Mindstorms EV3 programozása
 A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
Mobilszerkezetek mechatronikája
 Mobilszerkezetek mechatronikája Gépészeti rész: (Dr. Ruszinkó) Elektronikai rész: Motorvezérlés: üzemanyag befecskendezés vezérlése Menetvezérlés: kipörgésgátlás, csúszásgátlás.... - Járműmechatronika-
Mobilszerkezetek mechatronikája Gépészeti rész: (Dr. Ruszinkó) Elektronikai rész: Motorvezérlés: üzemanyag befecskendezés vezérlése Menetvezérlés: kipörgésgátlás, csúszásgátlás.... - Járműmechatronika-
A MMK Gépészeti Tagozathoz tartozó vezető szakértői szakterületek és az azokhoz tartozó tanúsítási részszakterületek
 A MMK Gépészeti Tagozathoz tartozó vezető szakértői szakterületek és az azokhoz tartozó tanúsítási részszakterületek 2. Melléklet G-C-V Kohászat-öntészet G-C 1. Koksz- és gázgyártás. [Dévényi] 2. Nyersvasgyártás,
A MMK Gépészeti Tagozathoz tartozó vezető szakértői szakterületek és az azokhoz tartozó tanúsítási részszakterületek 2. Melléklet G-C-V Kohászat-öntészet G-C 1. Koksz- és gázgyártás. [Dévényi] 2. Nyersvasgyártás,
MINDEN ÚJ ÖTLET HÁTTERÉBEN EGY KIHÍVÁS ÁLL
 IFC DO NOT PRINT 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 1 2 2 3 5 2 4 3 16 17 SKYACTIV TECHNOLOGY 18 19 6 1 7 5 2 4 3 8 20 21 A LEGBIZTONSÁGOSABB TARTÓZKODÁSI HELY AZ ÚTON Minden általunk gyártott Mazda számos
IFC DO NOT PRINT 2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 1 2 2 3 5 2 4 3 16 17 SKYACTIV TECHNOLOGY 18 19 6 1 7 5 2 4 3 8 20 21 A LEGBIZTONSÁGOSABB TARTÓZKODÁSI HELY AZ ÚTON Minden általunk gyártott Mazda számos
ROBOTTECHNIKA ALKALMAZÁSOK, ROBOT FOGALMA. Dr. Pintér József
 ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
Neurális hálózatok bemutató
 Neurális hálózatok bemutató Füvesi Viktor Miskolci Egyetem Alkalmazott Földtudományi Kutatóintézet Miért? Vannak feladatok amelyeket az agy gyorsabban hajt végre mint a konvencionális számítógépek. Pl.:
Neurális hálózatok bemutató Füvesi Viktor Miskolci Egyetem Alkalmazott Földtudományi Kutatóintézet Miért? Vannak feladatok amelyeket az agy gyorsabban hajt végre mint a konvencionális számítógépek. Pl.:
Informatika Rendszerek Alapjai
 Informatika Rendszerek Alapjai Dr. Kutor László Alapfogalmak Információ-feldolgozó paradigmák Analóg és digitális rendszerek jellemzői Jelek típusai Átalakítás rendszerek között http://uni-obuda.hu/users/kutor/
Informatika Rendszerek Alapjai Dr. Kutor László Alapfogalmak Információ-feldolgozó paradigmák Analóg és digitális rendszerek jellemzői Jelek típusai Átalakítás rendszerek között http://uni-obuda.hu/users/kutor/
A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI MÉRNÖK KÉPZÉSBEN
 IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
Sugárzáson, és infravörös sugárzáson alapuló hőmérséklet mérés.
 Sugárzáson, és infravörös sugárzáson alapuló hőmérséklet mérés. A sugárzáson alapuló hőmérsékletmérés (termográfia),azt a fizikai jelenséget használja fel, hogy az abszolút nulla K hőmérséklet (273,16
Sugárzáson, és infravörös sugárzáson alapuló hőmérséklet mérés. A sugárzáson alapuló hőmérsékletmérés (termográfia),azt a fizikai jelenséget használja fel, hogy az abszolút nulla K hőmérséklet (273,16
Hálózatok esszé RFID A rádiófrekvenciás azonosító rendszerek. Gacsályi Bertalan (GABMAAT.SZE)
") Hálózatok esszé RFID A rádiófrekvenciás azonosító rendszerek Gacsályi Bertalan (GABMAAT.SZE) TARTALOMJEGYZÉK 1. RFID (Radio Frequency Identification) meghatározása... 3 2. A rendszer felépítése... 3 3.
Hálózatok esszé RFID A rádiófrekvenciás azonosító rendszerek Gacsályi Bertalan (GABMAAT.SZE) TARTALOMJEGYZÉK 1. RFID (Radio Frequency Identification) meghatározása... 3 2. A rendszer felépítése... 3 3.
Érzékelők az autonóm járművekben
 Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
RFID rendszer felépítése
 RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
RFID és RTLS RFID rendszer felépítése 1. Tag-ek (transzponder) 2. Olvasók (interrogátor) 3. Számítógépes infrastruktúra 4. Szoftverek Tárgyak, élőlények, helyszínek azonosítása, követése és menedzsmentje
Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések
 www.geodezia.hu Geodézia Zrt. 31. Vándorgyűlés Szekszárd, 2017. július 6-8. Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések Csörgits Péter Miről lesz szó? VONALAS
www.geodezia.hu Geodézia Zrt. 31. Vándorgyűlés Szekszárd, 2017. július 6-8. Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések Csörgits Péter Miről lesz szó? VONALAS
Önvezető autók. Gondos Bálint. Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány
 Önvezető autók Név: Gondos Bálint Dátum: 2015-11-30 2015-11-30átu Gondos Bálint Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány A megoldott probléma: A teljesen
Önvezető autók Név: Gondos Bálint Dátum: 2015-11-30 2015-11-30átu Gondos Bálint Óbudai Egyetem Neumann János Informatikai Kar Beágyazott és mobil informatika szakirány A megoldott probléma: A teljesen
Tartalomjegyzék LED hátterek 3 LED gyűrűvilágítók LED sötét látóterű (árnyék) megvilágítók 5 LED mátrix reflektor megvilágítók
 megvilágítók 5 LED mátrix reflektor megvilágítók") 1 Tartalomjegyzék LED hátterek 3 LED gyűrűvilágítók 4 LED sötét látóterű (árnyék) megvilágítók 5 LED mátrix reflektor megvilágítók 6 HEAD LUXEON LED vezérelhető reflektorok 7 LUXEON LED 1W-os, 3W-os, 5W-os
1 Tartalomjegyzék LED hátterek 3 LED gyűrűvilágítók 4 LED sötét látóterű (árnyék) megvilágítók 5 LED mátrix reflektor megvilágítók 6 HEAD LUXEON LED vezérelhető reflektorok 7 LUXEON LED 1W-os, 3W-os, 5W-os
Számítógépes látás alapjai
 Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 23 Rekonstrukció speciális hardverekkel
Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 23 Rekonstrukció speciális hardverekkel
Kis magasságban végzett légi térképészeti munkák tapasztalatai. LÉGIFOTÓ NAP Székesfehérvár GeoSite Kft Horváth Zsolt
 Kis magasságban végzett légi térképészeti munkák tapasztalatai LÉGIFOTÓ NAP 2018 - Székesfehérvár GeoSite Kft Horváth Zsolt Az UAV technológiák térképészeti célú alkalmazásának lehetőségei, célterületei:
Kis magasságban végzett légi térképészeti munkák tapasztalatai LÉGIFOTÓ NAP 2018 - Székesfehérvár GeoSite Kft Horváth Zsolt Az UAV technológiák térképészeti célú alkalmazásának lehetőségei, célterületei:
HASZNÁLATI ÚTMUTATÓ Tolatóradarhoz
 HASZNÁLATI ÚTMUTATÓ Tolatóradarhoz Tartalomjegyzék Beépítés és bekötési rajz Vázlatos bekötési ábrák Szenzorok beépítése A kijelző elhelyezése Központi egység telepítése Funkciók Riasztás A rendszer működése
HASZNÁLATI ÚTMUTATÓ Tolatóradarhoz Tartalomjegyzék Beépítés és bekötési rajz Vázlatos bekötési ábrák Szenzorok beépítése A kijelző elhelyezése Központi egység telepítése Funkciók Riasztás A rendszer működése
Ingatlan felmérési technológiák
 Ingatlan felmérési technológiák Fekete Attila okl. földmérő és térinformatikai mérnök Photo.metric Kft. www.photometric.hu geodézia. épületfelmérés. térinformatika Áttekintés Mérési módszerek, technológiák
Ingatlan felmérési technológiák Fekete Attila okl. földmérő és térinformatikai mérnök Photo.metric Kft. www.photometric.hu geodézia. épületfelmérés. térinformatika Áttekintés Mérési módszerek, technológiák
Intelligens hatlábú robot kinematikai vizsgálata
 Sályi István Gépészeti Tudományok Doktori Iskola Intelligens hatlábú robot kinematikai vizsgálata Füvesi Viktor I. éves doktorandusz Tel: +6-46-565111/1144 e-mail: elkfv@uni-miskolc.hu Témavezető: Dr.
Sályi István Gépészeti Tudományok Doktori Iskola Intelligens hatlábú robot kinematikai vizsgálata Füvesi Viktor I. éves doktorandusz Tel: +6-46-565111/1144 e-mail: elkfv@uni-miskolc.hu Témavezető: Dr.
Szakképesítés: 54 523 01 Automatikai technikus Szóbeli vizsgatevékenység A vizsgafeladat megnevezése: Irányítástechnikai alapok, gyártórendszerek
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a IV. Szakmai követelmények fejezetben megadott 10003-12 Irányítástechnikai alapok és a 10002-12 Ipari
KÖZEG. dv dt. q v. dm q m. = dt GÁZOK, GŐZÖK ÉS FOLYADÉKOK ÁRAMLÓ MENNYISÉGÉNEK MÉRÉSE MÉRNI LEHET:
 GÁZOK, GŐZÖK ÉS FOLYADÉKOK ÁRAMLÓ MENNYISÉGÉNEK MÉRÉSE MÉRNI LEHET: AZ IDŐEGYSÉG ALATT ÁTÁRAMLÓ MENNYISÉG TÉRFOGATÁT TÉRFOGATÁRAM MÉRÉS q v = dv dt ( m 3 / s) AZ IDŐEGYSÉG ALATT ÁTÁRAMLÓ MENNYISÉG TÖMEGÉT
GÁZOK, GŐZÖK ÉS FOLYADÉKOK ÁRAMLÓ MENNYISÉGÉNEK MÉRÉSE MÉRNI LEHET: AZ IDŐEGYSÉG ALATT ÁTÁRAMLÓ MENNYISÉG TÉRFOGATÁT TÉRFOGATÁRAM MÉRÉS q v = dv dt ( m 3 / s) AZ IDŐEGYSÉG ALATT ÁTÁRAMLÓ MENNYISÉG TÖMEGÉT
megoldások világításvezérlési Széles körű Irodák Iroda Természetes fény nélküli helyiségekbe Technikai helyiség Galéria Raktár Folyosó Mosdók
 Program Mosaic TM világításvezérlés Széles körű világításvezérlési megoldások Költséghatékony működésre tervezve Irodák Természetes fény nélküli helyiségekbe ECO 1 Megoldások Automatikus fel- és lekapcsolás
Program Mosaic TM világításvezérlés Széles körű világításvezérlési megoldások Költséghatékony működésre tervezve Irodák Természetes fény nélküli helyiségekbe ECO 1 Megoldások Automatikus fel- és lekapcsolás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 3. MÉRÉSFELDOLGOZÁS Dr. Soumelidis Alexandros 2018.10.04. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Mérés-feldolgozás
E3S-CT11 E3S-CT61 E3S-CR11 E3S-CR61 E3S-CD11 E3S-CD61 E3S-CD12 E3S-CD62
 OMRON FOTOELEKTROMOS KAPCSOLÓK E3S-C E3S-C Olaj- és vízálló fotokapcsoló fémtokozásban, nagy érzékelési távolsággal Megfelel a következõ szabványoknak: IP67, NEMA 6P, IP67G (olajálló) PNP vagy NPN kimenet
OMRON FOTOELEKTROMOS KAPCSOLÓK E3S-C E3S-C Olaj- és vízálló fotokapcsoló fémtokozásban, nagy érzékelési távolsággal Megfelel a következõ szabványoknak: IP67, NEMA 6P, IP67G (olajálló) PNP vagy NPN kimenet
Nemzeti Alaptanterv Informatika műveltségterület Munkaanyag. 2011. március
 Nemzeti Alaptanterv Informatika műveltségterület Munkaanyag 2011. március 1 Informatika Alapelvek, célok Az információ megszerzése, megértése, feldolgozása és felhasználása, vagyis az információs műveltség
Nemzeti Alaptanterv Informatika műveltségterület Munkaanyag 2011. március 1 Informatika Alapelvek, célok Az információ megszerzése, megértése, feldolgozása és felhasználása, vagyis az információs műveltség
GÉPIPARI AUTOMATIZÁLÁS
 GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
Tárgy. Forgóasztal. Lézer. Kamera 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL
 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu
 Gyártórendszerek mechatronikája Termelési folyamatok II. 07 3D szkennelés Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu miko.balazs@bgk.uni-obuda.hu 1 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai
Gyártórendszerek mechatronikája Termelési folyamatok II. 07 3D szkennelés Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu miko.balazs@bgk.uni-obuda.hu 1 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai
Takács Árpád K+F irányok
 Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
I S R G Gépi tanulás, neuronhálók
 I S R G Gépi tanulás, neuronhálók MI Horváth Gábor Egy intelligens rendszernek szükségszerűen rendelkeznie kell adaptációs, tanulási képességgel. Mi a (gépi) tanulás? A gépi tanulás során egy gép a tanuló
I S R G Gépi tanulás, neuronhálók MI Horváth Gábor Egy intelligens rendszernek szükségszerűen rendelkeznie kell adaptációs, tanulási képességgel. Mi a (gépi) tanulás? A gépi tanulás során egy gép a tanuló
Alkalmazási példa: konyha. Meghatározott háttérfény jelenet, például napi rutin szerint. Fényerő: csökkentett
 Hue mozgásérzékelő Alkalmazási példa: konyha 3 Meghatározott háttérfény jelenet, például napi rutin szerint. Fényerő: csökkentett Alkalmazási példa: konyha 4 Mozgás észlelésekor, felkapcsolódnak az előre
Hue mozgásérzékelő Alkalmazási példa: konyha 3 Meghatározott háttérfény jelenet, például napi rutin szerint. Fényerő: csökkentett Alkalmazási példa: konyha 4 Mozgás észlelésekor, felkapcsolódnak az előre
BME Automatizálási és Alkalmazott Informatikai Tanszék
 2013 BME Automatizálási és Alkalmazott Informatikai Tanszék A verseny célja Önállóan működő robot, távirányítás nincs Minél rövidebb idő alatt végighaladni két akadálypályán A pályák előre ismert elemekből
2013 BME Automatizálási és Alkalmazott Informatikai Tanszék A verseny célja Önállóan működő robot, távirányítás nincs Minél rövidebb idő alatt végighaladni két akadálypályán A pályák előre ismert elemekből
A nagy időfelbontású kamerák következő generációja: EDICAM
 A nagy időfelbontású kamerák következő generációja: EDICAM Bevezető A gyorskamerák korlátai Az EDICAM fejlesztés Hardver NDR kiolvasás Intelligens funkciók Pellet és videódiagnosztika csoport (PFO) Cseh
A nagy időfelbontású kamerák következő generációja: EDICAM Bevezető A gyorskamerák korlátai Az EDICAM fejlesztés Hardver NDR kiolvasás Intelligens funkciók Pellet és videódiagnosztika csoport (PFO) Cseh
Világítástechnikai mérés
 1. gyakorlat Világítástechnikai mérés A gyakorlat során a hallgatók 3 mérési feladatot végeznek el: 1. Fotometriai távolságtörvény érvényességének vizsgálata Mérés célja: A fotometriai távolságtörvény
1. gyakorlat Világítástechnikai mérés A gyakorlat során a hallgatók 3 mérési feladatot végeznek el: 1. Fotometriai távolságtörvény érvényességének vizsgálata Mérés célja: A fotometriai távolságtörvény
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
Tudásintenzív Mechatronikai és Logisztikai Rendszerek Regionális Egyetemi Tudásközpont. záró szakmai beszámoló
 Tudásintenzív Mechatronikai és Logisztikai Rendszerek Regionális Egyetemi Tudásközpont záró szakmai beszámoló 2005-2008 Tartalomjegyzék Tartalomjegyzék... 2 Vállalt feladatok... 3 Intelligens építőelemek
Tudásintenzív Mechatronikai és Logisztikai Rendszerek Regionális Egyetemi Tudásközpont záró szakmai beszámoló 2005-2008 Tartalomjegyzék Tartalomjegyzék... 2 Vállalt feladatok... 3 Intelligens építőelemek
2019/2020 Felvételi eredmény
 Tanulói a. 72453804220 ács 72464869439 ács 72445134666 ács 72520491204 ács 72520489841 ács 72143401216 ács 72458802149 ács 72353537957 ács 72520058502 ács 72520064751 ács 72508164282 ács szakma 72433286647
Tanulói a. 72453804220 ács 72464869439 ács 72445134666 ács 72520491204 ács 72520489841 ács 72143401216 ács 72458802149 ács 72353537957 ács 72520058502 ács 72520064751 ács 72508164282 ács szakma 72433286647
VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK
 VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK http://www.zmne.hu/kmdi/index.html TUDOMÁNYSZAKVEZETŐ Dr. Haig Zsolt mk. alezredes, egyetemi docens 29-343 haig.zsolt@zmne.hu http://www.zmne.hu/tanszekek/ehc/indul.htm
VÉDELMI ELEKTRONIKA, INFORMATIKA ÉS KOMMUNIKÁCIÓ TUDOMÁNYSZAK http://www.zmne.hu/kmdi/index.html TUDOMÁNYSZAKVEZETŐ Dr. Haig Zsolt mk. alezredes, egyetemi docens 29-343 haig.zsolt@zmne.hu http://www.zmne.hu/tanszekek/ehc/indul.htm
Mesterséges Intelligencia Elektronikus Almanach. Konzorciumi partnerek
 Mesterséges Intelligencia Elektronikus Almanach Konzorciumi partnerek 1 Konzorcium Budpesti Mőszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Méréstechnika és Információs Rendszerek
Mesterséges Intelligencia Elektronikus Almanach Konzorciumi partnerek 1 Konzorcium Budpesti Mőszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Méréstechnika és Információs Rendszerek
Öko-technika. 5-8. évfolyam. Célok és feladatok. A tantárgy feladatai az 5-8. évfolyamokon. Szűcs Sándor Általános Iskola
 Öko-technika Az öko-technika integrált tantárgy, mely a technika és életvitel tárgyat veszi alapul, meghagyva ennek teljes követelményrendszerét kiegészítve a környezeti nevelés egy- egy kapcsolódó részterületével.
Öko-technika Az öko-technika integrált tantárgy, mely a technika és életvitel tárgyat veszi alapul, meghagyva ennek teljes követelményrendszerét kiegészítve a környezeti nevelés egy- egy kapcsolódó részterületével.
Intelligens Közlekedési Rendszerek 2
 Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Intelligens Közlekedési Rendszerek 2 Máté Miklós 2016 Október 11 1 / 14 Szenzor (érzékelő): mérés, detektálás Mérés elmélet emlékeztető Jó mérőműszer tulajdonságai Érzékeny a mérendő tulajdonságra Érzéketlen
Önállóan működő. gyommentesítő. mechanikailag. művelő robot
 Zöldségekhez Önállóan működő gyommentesítő-művelő mechanikailag gyommentesítő művelő robot Az első, bárki számára elérhető Teljesen önállóan működő, elektromos mezőgazdasági robot Ágyásokban, sorban ültetett
Zöldségekhez Önállóan működő gyommentesítő-művelő mechanikailag gyommentesítő művelő robot Az első, bárki számára elérhető Teljesen önállóan működő, elektromos mezőgazdasági robot Ágyásokban, sorban ültetett
Etológia Emelt A viselkedés mérése. Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018
 Etológia Emelt A viselkedés mérése Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018 amiklosi62@gmail.com A viselkedés leírása: A viselkedés, mint fenotipikus jellemző Viselkedés: Élő szervezetek
Etológia Emelt A viselkedés mérése Miklósi Ádám egyetemi tanár ELTE TTK Etológia Tanszék 2018 amiklosi62@gmail.com A viselkedés leírása: A viselkedés, mint fenotipikus jellemző Viselkedés: Élő szervezetek
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. PÉLDÁK - FELADATOK Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Idei fő példafeladat:
Belépést szabályzó hatékony és elegáns rendszer üzletek számára
 Belépést szabályzó hatékony és elegáns rendszer üzletek számára A Pass-O-Mat motoros lengőkapukat az üzletekbe való belépés szabályozására és a vevők útbaigazítására terveztük, valamint annak megakadályozására,
Belépést szabályzó hatékony és elegáns rendszer üzletek számára A Pass-O-Mat motoros lengőkapukat az üzletekbe való belépés szabályozására és a vevők útbaigazítására terveztük, valamint annak megakadályozására,
Integrált biztonsági rendszerek metrikái
 Integrált biztonsági rendszerek metrikái Metrics of integrated security systems Copyright 2006 www.futurit.eu IBKFK (PE MIK, KÜRT ZRt.) BIZTONSÁGTECNIKAI ESZKÖZÖK SZENZOROK SZENZORHÁLÓZATOK ELÉRHETŐSÉGEK
Integrált biztonsági rendszerek metrikái Metrics of integrated security systems Copyright 2006 www.futurit.eu IBKFK (PE MIK, KÜRT ZRt.) BIZTONSÁGTECNIKAI ESZKÖZÖK SZENZOROK SZENZORHÁLÓZATOK ELÉRHETŐSÉGEK
12. Á GENSALAPÚ TECHNOLÓGIÁK
 12. Á GENSALAPÚ TECHNOLÓGIÁK Kömlődi Ferenc Az autonóm működési móddal rendelkező programrészek, az ÁGENSek, valamint azok multi-ágens, rajintelligencia-rendszerei egyre több alkalmazási feladat megoldásánál
12. Á GENSALAPÚ TECHNOLÓGIÁK Kömlődi Ferenc Az autonóm működési móddal rendelkező programrészek, az ÁGENSek, valamint azok multi-ágens, rajintelligencia-rendszerei egyre több alkalmazási feladat megoldásánál
BME-ÁFGT. MÉRNÖKGEODÉZIA A XXI. században. Külszíni bányamérés támogatása Mobil Térképező Rendszerrel. Sopron-II. gneisz Süttő-I.
 Külszíni bányamérés támogatása MMS-sel BME-ÁFGT MÉRNÖKGEODÉZIA A XXI. században Külszíni bányamérés támogatása Mobil Térképező Rendszerrel Sopron-II. gneisz Süttő-I. mészkő, főmérnök Geodézia Zrt. Amiről
Külszíni bányamérés támogatása MMS-sel BME-ÁFGT MÉRNÖKGEODÉZIA A XXI. században Külszíni bányamérés támogatása Mobil Térképező Rendszerrel Sopron-II. gneisz Süttő-I. mészkő, főmérnök Geodézia Zrt. Amiről
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares
 Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
Transzformátor rezgés mérés. A BME Villamos Energetika Tanszéken
 Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Felhasználói kézikönyv
 Felhasználói kézikönyv 5040 Lézeres távolságmérő TARTALOMJEGYZÉK 1. Bevezetés... 2 2. Az elemek cseréje... 2 3. A készülék felépítése... 2 4. Műszaki jellemzők... 3 5. A lézeres távolságmérő bekapcsolása...
Felhasználói kézikönyv 5040 Lézeres távolságmérő TARTALOMJEGYZÉK 1. Bevezetés... 2 2. Az elemek cseréje... 2 3. A készülék felépítése... 2 4. Műszaki jellemzők... 3 5. A lézeres távolságmérő bekapcsolása...
Irodából a terepre: a mobil informatika (alkalmazás bemutató)
") Irodából a terepre: a mobil informatika (alkalmazás bemutató) Készítette: Dátum: Fűr Attila 2014.10.30. Bevezetés A mobilitás szerepe átértékelődik Gazdasági környezet változik: Válság, megszorítások kevesebb
Irodából a terepre: a mobil informatika (alkalmazás bemutató) Készítette: Dátum: Fűr Attila 2014.10.30. Bevezetés A mobilitás szerepe átértékelődik Gazdasági környezet változik: Válság, megszorítások kevesebb
Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége
 Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert 2014.11.14. Az informatika, mint segítő ágazat Az informatika
Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert 2014.11.14. Az informatika, mint segítő ágazat Az informatika
Az oldalkefék a falak és sarkok alapos tisztítására alkalmasak
 - Oldalkefe - Vákuummotor ------ Forgókefe ------ Gumikefe ------ Felmosó ------ Fertőtlenítő ------ Szűrő ---- Az oldalkefék a falak és sarkok alapos tisztítására alkalmasak Az oldalkefe a falak és sarkok
- Oldalkefe - Vákuummotor ------ Forgókefe ------ Gumikefe ------ Felmosó ------ Fertőtlenítő ------ Szűrő ---- Az oldalkefék a falak és sarkok alapos tisztítására alkalmasak Az oldalkefe a falak és sarkok
RhT Léghőmérséklet és légnedvesség távadó
 RhT Léghőmérséklet és légnedvesség távadó UNITEK 2004-2007 2 Unitek Általános leírás Az RhT léghőmérséklet és légnedvességmérő távadó az UNITEK új fejlesztésű intelligens mérőtávadó családjának tagja.
RhT Léghőmérséklet és légnedvesség távadó UNITEK 2004-2007 2 Unitek Általános leírás Az RhT léghőmérséklet és légnedvességmérő távadó az UNITEK új fejlesztésű intelligens mérőtávadó családjának tagja.
FWA 4630 futómű-állító készülék
 FWA 4630 futómű-állító készülék Product Information Guide FWA 4630 1 Tartalom 1. Bemutatás 2. Áttekintés 3. Az alkotóelemek bemutatása 4. Installálási útmutató 5. Szoftver 6. Referencia-adatbázis 7. Kiegészítők
FWA 4630 futómű-állító készülék Product Information Guide FWA 4630 1 Tartalom 1. Bemutatás 2. Áttekintés 3. Az alkotóelemek bemutatása 4. Installálási útmutató 5. Szoftver 6. Referencia-adatbázis 7. Kiegészítők
Pneumatika az ipari alkalmazásokban
 Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése
 Üdvözlök mindenkit! Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése Bóka Jenő Óbudai Egyetem Kandó Kálmán Villamosmérnö Nappali tagozat, Szabályozott
Üdvözlök mindenkit! Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése Bóka Jenő Óbudai Egyetem Kandó Kálmán Villamosmérnö Nappali tagozat, Szabályozott
ES-D1A. Vezeték nélküli mozgásérzékelő. www.etiger.com
 ES-D1A Vezeték nélküli mozgásérzékelő www.etiger.com HU A doboz tartalma 1 x PIR Mozgásérzékelő 1 x Konzol 1 x Felhasználói kézikönyv 1. Érzékelő ablak 2. LED jelző 3. Konzol Legelső használat előtt Nyissa
ES-D1A Vezeték nélküli mozgásérzékelő www.etiger.com HU A doboz tartalma 1 x PIR Mozgásérzékelő 1 x Konzol 1 x Felhasználói kézikönyv 1. Érzékelő ablak 2. LED jelző 3. Konzol Legelső használat előtt Nyissa
Big Data technológiai megoldások fejlesztése közvetlen mezőgazdasági tevékenységekhez
 Big Data technológiai megoldások fejlesztése közvetlen mezőgazdasági tevékenységekhez Szármes Péter doktorandusz hallgató Széchenyi István Egyetem, MMTDI Dr. Élő Gábor egyetemi docens, Széchenyi István
Big Data technológiai megoldások fejlesztése közvetlen mezőgazdasági tevékenységekhez Szármes Péter doktorandusz hallgató Széchenyi István Egyetem, MMTDI Dr. Élő Gábor egyetemi docens, Széchenyi István
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ. Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György
 SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
A fényszabályozásról - 1 -
 A fényszabályozásról Az épületek különböző funkciójú helyiségeivel szemben (pl. folyosó, irodahelyiség, orvosi vizsgáló, múzeumi kiállítótér, forgácsoló üzem, stb.) más és más igények merülnek fel nem
A fényszabályozásról Az épületek különböző funkciójú helyiségeivel szemben (pl. folyosó, irodahelyiség, orvosi vizsgáló, múzeumi kiállítótér, forgácsoló üzem, stb.) más és más igények merülnek fel nem
Járműinformatika Bevezetés
 Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Járműinformatika Bevezetés 2018/2019. tanév, II. félév Dr. Kovács Szilveszter E-mail: szkovacs@iit.uni-miskolc.hu Informatika Intézet 107/a. Tel: (46) 565-111 / 21-07 Autó elektronika az 1970-es években
Navigáci. stervezés. Algoritmusok és alkalmazásaik. Osváth Róbert Sorbán Sámuel
 Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Canon biztonsági kamerák összefoglaló 2014 SZEPTEMBER
 Canon biztonsági kamerák összefoglaló 2014 SZEPTEMBER Full HD termékválaszték PTZ IP66 DÓM FIXED BOX MINI DÓM VB-H41/B 60.4 látómező 20x optikai zoom Full HD (1920x1080) Rossz fényviszony: Színes 0.4lux
Canon biztonsági kamerák összefoglaló 2014 SZEPTEMBER Full HD termékválaszték PTZ IP66 DÓM FIXED BOX MINI DÓM VB-H41/B 60.4 látómező 20x optikai zoom Full HD (1920x1080) Rossz fényviszony: Színes 0.4lux
Alter Róbert Báró Csaba Sensor Technologies Kft
 Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
HELYSZÍN: RAMADA RESORT AQUAWORLD BUDAPEST IDÔPONT: 2011. OKTÓBER 27. REGISZTRÁCIÓ: HUNGARY.NI.COM/NIDAYS
 ÜZLET > [PRESSZÓ] A BOSCH TÖRTÉNETÉNEK SAROKPONTJAI 1886, Stuttgart a cég megalakul, finommechanikai és elektrotechnikai profillal I 1902 szinte az elsô gyártmányuk a nagyfeszültségû, mágneses gyújtási
ÜZLET > [PRESSZÓ] A BOSCH TÖRTÉNETÉNEK SAROKPONTJAI 1886, Stuttgart a cég megalakul, finommechanikai és elektrotechnikai profillal I 1902 szinte az elsô gyártmányuk a nagyfeszültségû, mágneses gyújtási