Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége
|
|
|
- Róbert Fehér
- 8 évvel ezelőtt
- Látták:
Átírás
1 Mezőgazdasági robot fejlesztése és jövőbeli bővíthetősége Tóth Mihály Informatikus és szakigazgatási agrármérnök (BSc) Konzulens: Dr. Szilágyi Róbert
 Konzulens: Dr.")
2 Az informatika, mint segítő ágazat Az informatika használatával jelentősen csökkenhet a célkitűzésünk eléréséhez szükséges forrásigény, illetve precízebb eredmény születhet. Általános formái a különböző irodai szoftverek és segédalkalmazások. Számos, a mezőgazdaságban hasznosítható informatikai eszköz van a piacon a nyilvántartó szoftvertől egészen a GPS segítségével működő, nyomvonaltartást segítő szoftverig.

3 Robotika A robot egy előre meghatározott programot futtató elektromechanikus szerkezet. Az első autonóm robot, a Machina speculatrix William Gray Walter nevéhez fűződik (1945) Számos kutatás zajlik a mezőgazdasági robotika fejlesztése kapcsán. Scout robotok Vetőgépek, permetezők és betakarítógépek Gyomfelismerés Automatikus öntözőgép Autonóm irányítású, multispektrális drónok

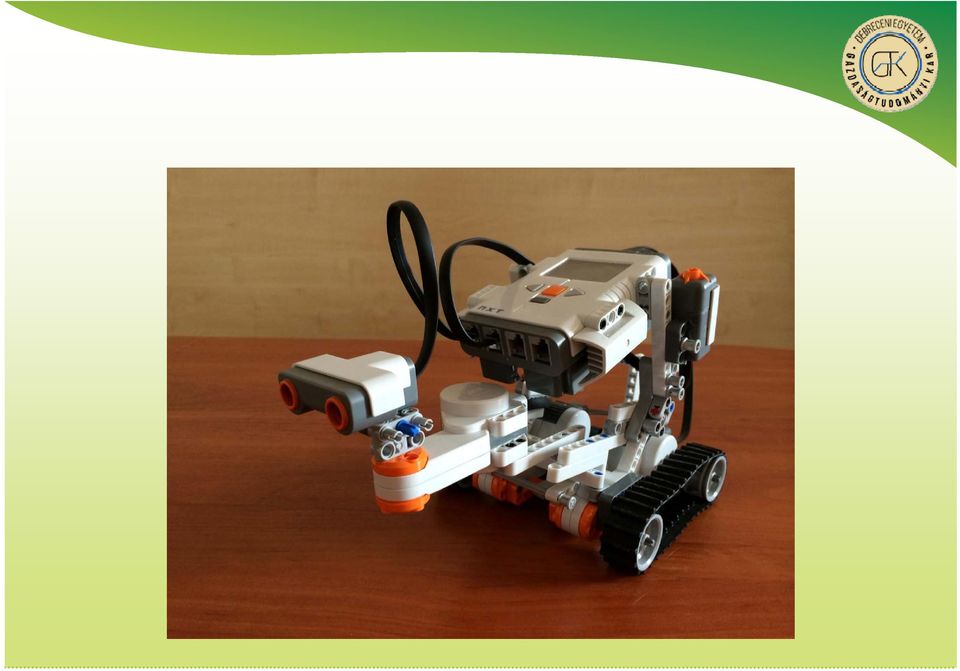
4 Lego NXT platform Három fő változatát ismerjük RCX (1998): 32 Kbyte programmemória, 3 szenzor és 3 motorport NXT (2006): 64 Kbyte programmemória, 4 szenzor és 3 motorport EV3 (2013): 16 Mbyte programmemória, 4 szenzor és 4 motorport Lego Mindstorms NXT 2.0 NXT G, C++ (RobotC) és számos nyelven programozható USB 2.0 és Bluetooth kapcsolat 100x64 pixeles, grafikus kijelző Gyárilag mellékelt szenzorok Ultrahangos távolságmérő Színszenzor Nyomógombok

5 Szenzorok és kiegészítők Szenzoroknak tekintünk minden külső tényezőt számszerűsíteni képes eszközt. Megkülönböztetünk az irányítást elősegítő, és felhasználó számára felhasználható adatokat tartalmazó szenzorokat. Az NXT platformhoz 6 tűs, moduláris csatlakozón kapcsolódnak a külső eszközök Külső gyártók által elérhetőek olyan szenzorok, melyek például a páratartalmat, hőmérsékletet, légnyomást, levegő mozgási sebességét, CO 2 mennyiségét, etanol előfordulását, fénymennyiséget, oxigén százalékos arányát, kémhatást és talajnedvességet képesek mérni.

6
7 Irányítási modell (kikerülés) Esetleges terepakadály észlelése esetén a program megszakítja az előre irányuló mozgást, és kikerülést hajt végre a zavartalan továbbhaladás érdekében. 1. Az ultrahangos távolságmérő 10 cm nek megfelelő értéket észlelve lassít, majd 5 cm nek megfelelő érték esetén megáll. 2. Körültekintés a továbblépéshez a távolságmérő használatával, majd az akadálymentes oldal felé való továbbhaladás. 3. A terepakadály mentén történő kikerülés, és ezzel a terepakadály letapogatása 4. Visszatérés a kikerülés kezdetekor fennálló menetirányba 5. Továbbhaladás egyenesen, vagy az irányítás visszaadása a GPS rendszer számára

8 Irányítási modell (GPS) Dexter Industries dgps eszköz Átalakítást nem igénylő, 6 tűs, moduláris csatlakozó Biztosított blokkok és illesztőprogramok Az adott terület 4 koordinátájának megadása után az eszköz meghatározott felbontás mellett történő pásztázása során járja be a pontok által közrefogott síkot. Eközben lehetőség nyílik az adatgyűjtések, illetve más programozott műveletek végrehajtására.

9 Microsoft Kinect Távvezérelt irányítás létrehozása a FAAST nevezetű, mozgás digitalizálására képes alkalmazással, majd a mozgás parancsokká való átalakítása. Rengeteg konfigurálási lehetőség cm es pontosság mellett. Megfelelő konfigurálás esetén a magunk elé tartott, ökölbe szorított kezünket meg tudjuk feleltetni az irányításért és haladásért felelős szervomotorok teljesítmény mutatóival.

10 Adatlogging Megkülönböztetünk belső és élő adatgyűjtést elősegítő módszert. Belső adatgyűjtés: Meghatározott feltételek fennállásakor, vagy meghatározott időközönként, adott formában egy.txt fájlba történik a kért szenzorok által mért adatok tárolása. Élő adatgyűjtés: Számítógéppel való közvetlen kapcsolat esetén a beállított mintavételezésnek megfelelő ütemben láthatjuk az új adatokat, majd ezt a művelet közben, valós időben (Real Time elemzés) megtekinthetjük és elemezhetjük.

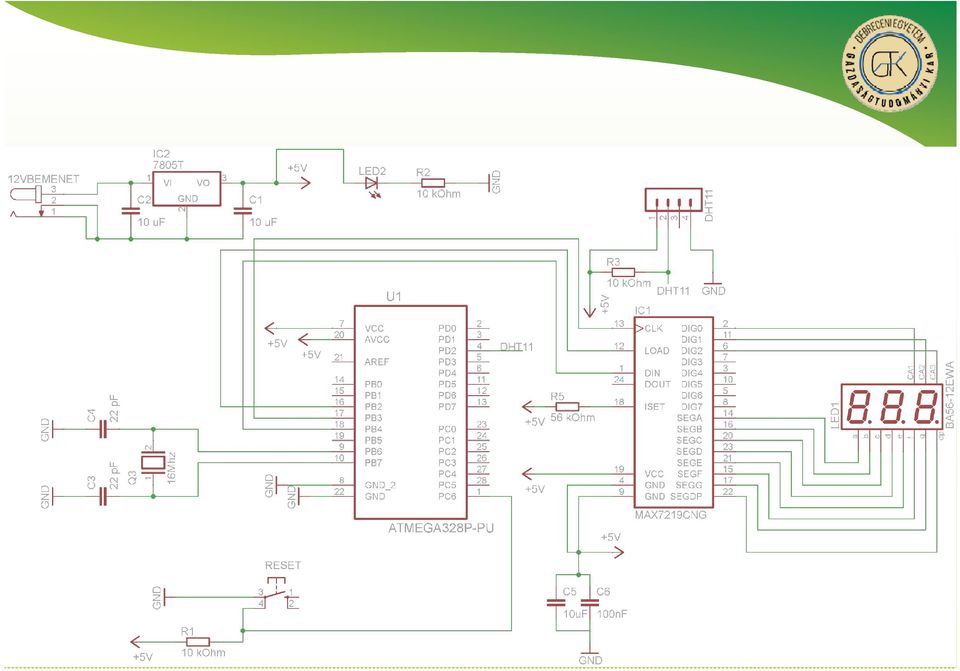
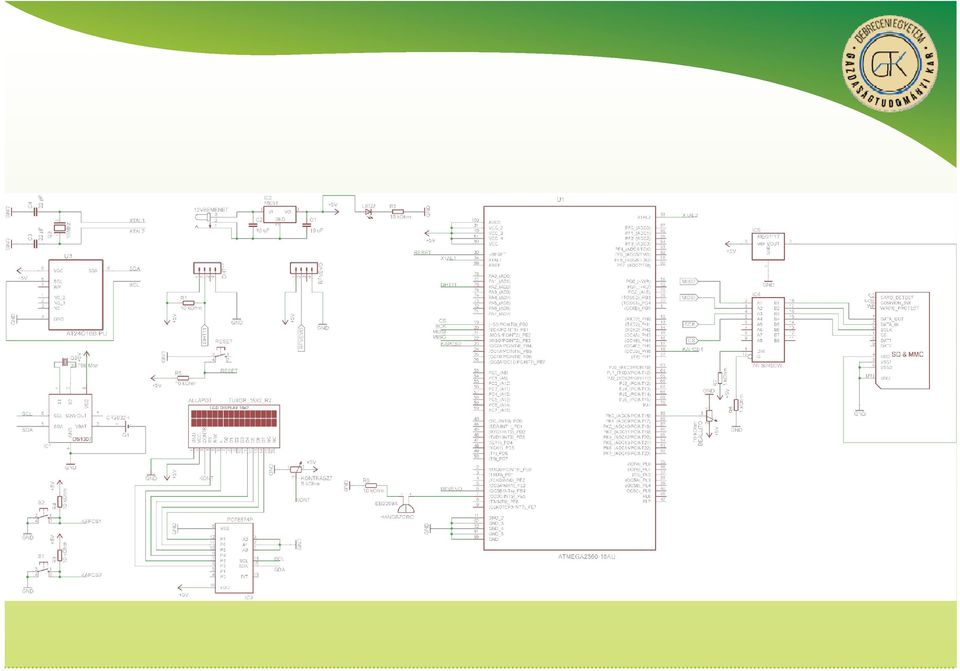
11 Fejlesztési lehetőségek Program precizitásának finomítása Az Arduino (Atmel) platform lehetőségei Specifikus szenzorok beszerzése NXT platform: Vernier Arduino platform és szenzorai: Változó gyártók (OS) Egyedi nyomtatott áramkörök fejlesztése Több mikrokontroller üzemeltetése I 2 C buszon keresztül, társprocesszor közreműködésével Szenzorlapok fejlesztése, melyek sorszám alapján azonosíthatóak a rendszer számára (ATtiny) Nagyobb váz megépítése az előzetesen elkészített tervek alapján
 Nagyobb váz megépítése az előzetesen")
12 Arduino platform Az Arduino egy 2005 óta piacon lévő, Atmel mikrokontroller családra épülő nyílt szoftverrel és hardverrel rendelkező, prototípus készítésére alkalmas platform. Számos típus érhető el az igényeknek megfelelően. (Uno, Mega, Mini, Lillypad, Duemilanove, Leonardo, Due) Uno esetén 13 digitális (ebből 6 PWM) és 5 analóg jel vételére és kiadására használható láb. I 2 C és SPI busz, TX, RX lábak soros kapcsolathoz Atmel Atmega 328p mikrokontroller, 32 Kbyte programmemória, 2 Kbyte SRAM, 1 Kbyte EEPROM

13 ISP programozás
14 Arduino szenzorok és kiegészítők Csatlakozásuk lehet digitális, PWM és analóg. Digitális: Adott értéket digitálisan átadó PWM: Impulzusszélesség moduláció Analóg: Egy ellenállás által képződő érték, mely a mikrokontrolleren belül konvertálódik használható értékké. Eddig beszerzésre került egy DHT11 es relatív páratartalom és hőmérsékletmérő szenzor, HC SR04 es távolságmérő és egy talajnedvesség mérő. Kiegészítőként használhatunk kijelzőket (16x2, grafikus), IC ket, kapcsolókat, motorokat (szervo, léptető), hangszórókat, potenciométer, más elektronikai eszközök

15 Arduino rendszerre írt programok Autonóm irányítás alapja Az NXT rendszeren megismert alkalmazáshoz hasonló, fejlesztés alatt lévő irányítási algoritmus Terminál Soros porton kommunikáló, utasításnak megfelelően az adott szenzor által olvasott adatot lekérő, majd megjelenítő programsor WDT alkalmazás Hiba esetén beavatkozás nélküli újraindítás Üvegház automatizálás (I 2 C, SPI, RF, LAN) Adott hőmérséklet és páratartalom esetén bekövetkező, relé által indított külső tápegység, majd külső eszköz elindítása
 Adott hőmérséklet és páratartalom esetén bekövetkező, relé által indított külső tápegység, majd külső eszköz")
16
17
18 Költségkalkuláció Lego Mindstorms NXT 2.0 Arduino Mindstorms NXT szett Ft Arduino UNO Ft Beépített kijelző 16x2 kijelző (I2C interfésszel) Ft Beépített Bluetooth 2.0 Bluetooth modul Ft 630 darabos Technics szett Váz Ft 3 darab szervomotor Szervomotorok 3x Ft Távolságmérő HC SRO Ft Kiegészítők Kiegészítők Ft Vernier adapter 3 x 50$ = Ft Adapter Vernier hőmérsékletmérő 36$ = Ft DHT Ft Vernier páratartalommérő 94$ = Ft DHT11 Vernier talajnedvesség mérő 130$ = Ft EDC Ft Összesen: Ft Összesen: Ft

19 Felhasználási lehetőségek Adatgyűjtés Térkép készítése különböző szenzorok által mért adattal területegységre vonatkoztatva Időbeli értékváltozások követése, esetleges előrejelzés meghatározása Precíziós műveletek Nagyobb és egyedi konstrukció esetén vetés, permetezés és szelektív betakarítás elvégzése Öntözéssel kapcsolatos automatizálás

20 Eredmények Létrehoztam az NXT platform segítségével egy autonóm és távvezérelt irányítást megcélzó programot NXT G és C programnyelven. Az Arduino platform segítségével számos eszközt és programot hoztam létre az azzal való kísérletezés érdekében. Tanulmányoztam az adatgyűjtési eljárásokat mindkét platformon, majd elkezdtem egy saját adatelemző program összeállítását. Több kísérletet végeztem egy saját tervezésű váz összeállításával kapcsolatban.

21 Köszönöm a megtisztelő figyelmet!
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok
 IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
IoT alapú mezőgazdasági adatgyűjtő prototípus fejlesztési tapasztalatok 2016.05.19. Szilágyi Róbert Tóth Mihály Debreceni Egyetem Az IoT Eszközök és más fizikai objektumok elektronikával, vezérléssel,
Arduino bevezető Szenzorhálózatok és alkalmazásaik
 Arduino bevezető Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Mi az Arduino? Nyílt hardver és szoftver platform 8 bites Atmel mikrokontroller köré építve Ökoszisztéma:
Arduino bevezető Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Mi az Arduino? Nyílt hardver és szoftver platform 8 bites Atmel mikrokontroller köré építve Ökoszisztéma:
SZERZŐ: Kiss Róbert. Oldal1
 A foglalkozáson LEGO MindStorms NXT/EV3 robottal és LEGO alkatrészekkel alkutonk körhinta szimulációt. Ez egyszerű építést és programozást igénylő feladat. Játékos formában lehet a fizikai forgást, egyensúlyt
A foglalkozáson LEGO MindStorms NXT/EV3 robottal és LEGO alkatrészekkel alkutonk körhinta szimulációt. Ez egyszerű építést és programozást igénylő feladat. Játékos formában lehet a fizikai forgást, egyensúlyt
A LEGO Mindstorms EV3 programozása
 A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
A LEGO Mindstorms EV3 programozása 1. A fejlesztői környezet bemutatása 12. Az MPU6050 gyorsulás- és szögsebességmérő szenzor Orosz Péter 1 Felhasznált irodalom LEGO MINDSTORMS EV3: Felhasználói útmutató
Újdonságok az Arduino szabadszoftveres platform körül. Noll János FSF.hu Alapítvány
 Újdonságok az Arduino szabadszoftveres platform körül Noll János FSF.hu Alapítvány Mi az Arduino? Szabad szoftveres (mikrokontrolleres) elektronikai fejlesztő platform Hardver + szoftver
Újdonságok az Arduino szabadszoftveres platform körül Noll János FSF.hu Alapítvány Mi az Arduino? Szabad szoftveres (mikrokontrolleres) elektronikai fejlesztő platform Hardver + szoftver
Műszaki Informatika Verseny Középiskolásoknak 2014. Szegedi Tudományegyetem TTIK Műszaki Informatika Tanszék EZT RAKTUK ÖSSZE!
 Műszaki Informatika Verseny Középiskolásoknak 2014 Szegedi Tudományegyetem TTIK Műszaki Informatika Tanszék EZT RAKTUK ÖSSZE! Szegedi Tudományegyetem 2014 Bíráló bizottság: Dr. Gingl Zoltán SZTE TTIK
Műszaki Informatika Verseny Középiskolásoknak 2014 Szegedi Tudományegyetem TTIK Műszaki Informatika Tanszék EZT RAKTUK ÖSSZE! Szegedi Tudományegyetem 2014 Bíráló bizottság: Dr. Gingl Zoltán SZTE TTIK
A TANTÁRGY ADATLAPJA
 A TANTÁRGY ADATLAPJA 1. A képzési program adatai 1.1 Felsőoktatási intézmény BABEŞ-BOLYAI TUDOMÁNYEGYETEM 1.2 Kar FIZIKA 1.3 Intézet A MAGYAR TAGOZAT FIZIKA INTÉZETE 1.4 Szakterület FIZIKA / ALKALMAZOTT
A TANTÁRGY ADATLAPJA 1. A képzési program adatai 1.1 Felsőoktatási intézmény BABEŞ-BOLYAI TUDOMÁNYEGYETEM 1.2 Kar FIZIKA 1.3 Intézet A MAGYAR TAGOZAT FIZIKA INTÉZETE 1.4 Szakterület FIZIKA / ALKALMAZOTT
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ. Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György
 SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
SZENZORMODUL ILLESZTÉSE LEGO NXT PLATFORMHOZ Készítette: Horváth András MSc Önálló laboratórium 2 Konzulens: Orosz György BEVEZETÉS Simonyi Károly szakkollégium LEGO és robotika kör NXT Cél: Választott
VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre
 VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre Tartalomjegyzék IPARI PARTNEREINK ÁLTAL MEGHIRDETETT TÉMÁK... 3 1. Basic Scan Tool (SW) kifejlesztése... 3
VILLAMOSMÉRNÖKÖK RÉSZÉRE MEGHIRDETETT SZAKDOLGOZAT TÉMÁK 2012/13.II. és 2013/2014 I. félévekre Tartalomjegyzék IPARI PARTNEREINK ÁLTAL MEGHIRDETETT TÉMÁK... 3 1. Basic Scan Tool (SW) kifejlesztése... 3
Beszámoló Programozási készségek fejlesztése Logo nyelven műhelymunka NTP-MTI-13 Emberi Erőforrások Minisztériuma
 Beszámoló Programozási készségek fejlesztése Logo nyelven műhelymunka A matematikai, a természettudományos és a műszaki, informatikai kompetenciák, valamint a szakmatanuláshoz szükséges kompetenciák erősítése
Beszámoló Programozási készségek fejlesztése Logo nyelven műhelymunka A matematikai, a természettudományos és a műszaki, informatikai kompetenciák, valamint a szakmatanuláshoz szükséges kompetenciák erősítése
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares
 Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
Robotot vezérlő szoftverek fejlesztése Developing robot controller softwares VARGA Máté 1, PÓGÁR István 2, VÉGH János 1 Programtervező informatikus BSc szakos hallgató 2 Programtervező informatikus MSc
nagyoknak kicsiknek SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE
 SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA nagyoknak kicsiknek BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE TUDOMÁNY ÉS TECHNIKA Egyszerű és meghajtott gépek Tudomány Műveltség Matek Kommunikáció
SKOLÁBA ISKOLÁBA ISKOLÁBA ISKOLÁ PROGRAMOZÁS ROBOTIKA nagyoknak kicsiknek BEHOZZUK A ZÖLD ENERGIÁKAT AZ OSZTÁLYTERMEKBE TUDOMÁNY ÉS TECHNIKA Egyszerű és meghajtott gépek Tudomány Műveltség Matek Kommunikáció
Konfigurálható digitális műszerfal Bosch MonoMotronic befecskendezőrendszerhez
 BMEVIFO4319 Önálló laboratórium Konfigurálható digitális műszerfal Bosch MonoMotronic befecskendezőrendszerhez Időközi beszámoló Molnár Bence ILUAUQ Konzulens: Kertész Zsolt Bevezető A járműelektronika
BMEVIFO4319 Önálló laboratórium Konfigurálható digitális műszerfal Bosch MonoMotronic befecskendezőrendszerhez Időközi beszámoló Molnár Bence ILUAUQ Konzulens: Kertész Zsolt Bevezető A járműelektronika
Robotkocsi mikrovezérlővel
 B é k é s c s a b a i K ö z p o n t i S z a k k é p z ő I s k o l a é s K o l l é g i u m Trefort Ágoston Műszaki Tagiskolája 5600 Békéscsaba, Puskin tér 1. Pf. 62 www.taszi.hu XVII. ORSZÁGOS ELEKTRONIKAI
B é k é s c s a b a i K ö z p o n t i S z a k k é p z ő I s k o l a é s K o l l é g i u m Trefort Ágoston Műszaki Tagiskolája 5600 Békéscsaba, Puskin tér 1. Pf. 62 www.taszi.hu XVII. ORSZÁGOS ELEKTRONIKAI
Nyomtatott áramkörök
 1 Nyomtatott áramkörök Ha nekilátunk egy elektronikai feladat megoldásának, akkor előbb-utóbb - fejben - eljutunk egy kapcsolási rajz vázlatáig, aztán abból kiindulva egy próba panel készítéséig. Ha pedig
1 Nyomtatott áramkörök Ha nekilátunk egy elektronikai feladat megoldásának, akkor előbb-utóbb - fejben - eljutunk egy kapcsolási rajz vázlatáig, aztán abból kiindulva egy próba panel készítéséig. Ha pedig
VGN-TT21XN/B. Extrém stílus és hordozhatóság
 VGN-TT21XN/B Extrém stílus és hordozhatóság Különösen kifinomult notebook, intenzív noir színben, nagy teljesítményű funkciókkal és biztonsági megoldásokkal. Fejezet: Extrém stílus és hordozhatóság 1 FŐ
VGN-TT21XN/B Extrém stílus és hordozhatóság Különösen kifinomult notebook, intenzív noir színben, nagy teljesítményű funkciókkal és biztonsági megoldásokkal. Fejezet: Extrém stílus és hordozhatóság 1 FŐ
MAGYAR NYELVŰ LEÍRÁS
 NXT 2.0 MAGYAR NYELVŰ LEÍRÁS 2010. Készítette: Czár Krisztián A DOBOZ TARTALMA A sárgával keretezett részek jelzik az NXT 2.0 új elemeit RÉSZEGYSÉGEK SZERVOMOTOR NYOMÁSÉRZÉKELŐ SZERVOMOTOR SZERVOMOTOR
NXT 2.0 MAGYAR NYELVŰ LEÍRÁS 2010. Készítette: Czár Krisztián A DOBOZ TARTALMA A sárgával keretezett részek jelzik az NXT 2.0 új elemeit RÉSZEGYSÉGEK SZERVOMOTOR NYOMÁSÉRZÉKELŐ SZERVOMOTOR SZERVOMOTOR
Többfunkciós hobbirobot építése és vezérlése Arduino UNO mikrovezérlő kártya segítségével
 Miskolci Egyetem Gépészmérnöki és Informatikai Kar Villamosmérnöki Intézet Elektrotechnikai-Elektronikai Intézeti Tanszék Villamosmérnöki szak Elektronikai tervezés és gyártás szakirány Többfunkciós hobbirobot
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Villamosmérnöki Intézet Elektrotechnikai-Elektronikai Intézeti Tanszék Villamosmérnöki szak Elektronikai tervezés és gyártás szakirány Többfunkciós hobbirobot
A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA
 infokommunikációs technológiák A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA Heckl István Projektzáró rendezvény Veszprém, 2015. június 22. TARTALOM I.1 Felhő
infokommunikációs technológiák A NIKK LOGISZTIKAI RENDSZEREK INFORMÁCIÓS TECHNOLÓGIÁJÁBAN ELÉRT EREDMÉNYEINEK BEMUTATÁSA Heckl István Projektzáró rendezvény Veszprém, 2015. június 22. TARTALOM I.1 Felhő
IDAXA-PiroSTOP JFE RS485 intelligens repeater 2004/0177/0113 Terméklap
 IDAXA-PiroSTOP JFE RS485 intelligens repeater 24/77/3 Terméklap Hexium Kft. JFE Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 6 2.2 KAPCSOLAT A VKGY GYŰRŰVEL... 6 2.3 KAPCSOLAT
IDAXA-PiroSTOP JFE RS485 intelligens repeater 24/77/3 Terméklap Hexium Kft. JFE Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 6 2.2 KAPCSOLAT A VKGY GYŰRŰVEL... 6 2.3 KAPCSOLAT
Vezeték nélküli, elosztott rendszerű jelzőlámpás forgalomirányítás
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Vezeték nélküli, elosztott rendszerű jelzőlámpás forgalomirányítás Tamaskovics
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Vezeték nélküli, elosztott rendszerű jelzőlámpás forgalomirányítás Tamaskovics
KÖNNYŰFÉM KERÉKTÁRCSA SZETT 17, SZÜRKE ECOREFLEX
 OPTIKAI TUNING KÖNNYŰFÉM KERÉKTÁRCSA SZETT 17, DUPLAKÜLLŐS, FEKETE Méret: ET 41 (7Jx17 H2). Szett elemei: 4 db felni, cikkszám 71806614. Gumiabroncsa: 225/45 R17. Kifejezetten az 500L-hez készült felniközepek
OPTIKAI TUNING KÖNNYŰFÉM KERÉKTÁRCSA SZETT 17, DUPLAKÜLLŐS, FEKETE Méret: ET 41 (7Jx17 H2). Szett elemei: 4 db felni, cikkszám 71806614. Gumiabroncsa: 225/45 R17. Kifejezetten az 500L-hez készült felniközepek
Norway Grants. Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai. Kakuk Zoltán, Vision 95 Kft.
 Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
Norway Grants AKKUMULÁTOR REGENERÁCIÓS ÉS Az akkumulátor mikromenedzsment szabályozás - BMMR - fejlesztés technológiai és műszaki újdonságai Kakuk Zoltán, Vision 95 Kft. 2017.04.25. Rendszer szintű megoldás
FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS
 Koncz Miklós Tamás FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS Magyarországon megszűnt a nagyoroszi (Drégelypalánk) lőtér, a térségben található egyetlen,
Koncz Miklós Tamás FEDÉLZETI INERCIÁLIS ADATGYŰJTŐ RENDSZER ALKALMAZÁSA PILÓTA NÉLKÜLI REPÜLŐGÉPEKBEN BEVEZETÉS Magyarországon megszűnt a nagyoroszi (Drégelypalánk) lőtér, a térségben található egyetlen,
Házi feladatok Szenzorhálózatok és alkalmazásaik
 Házi feladatok Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Általános tudnivalók 6 téma 6 db. 4 fős csoport A házi feladat elvégzése kötelező, a vizsgára jelentkezés feltétele
Házi feladatok Szenzorhálózatok és alkalmazásaik VITMMA09 Okos város MSc mellékspecializáció Általános tudnivalók 6 téma 6 db. 4 fős csoport A házi feladat elvégzése kötelező, a vizsgára jelentkezés feltétele
Mikrovezérlők alkalmazása házi feladatok
 Mikrovezérlők alkalmazása házi feladatok Feladatválasztás a gyakorlaton személyesen történik! Leadási határidő: 13. -14. heti gyakorlat póthét (pótleadás pótdíj ellenében) Beadandó: Néhány oldalas dokumentáció,
Mikrovezérlők alkalmazása házi feladatok Feladatválasztás a gyakorlaton személyesen történik! Leadási határidő: 13. -14. heti gyakorlat póthét (pótleadás pótdíj ellenében) Beadandó: Néhány oldalas dokumentáció,
ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA
 ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA A PC FIZIKAI KIÉPÍTÉSÉNEK ALAPELEMEI Chip (lapka) Mikroprocesszor (CPU) Integrált áramköri lapok: alaplap, bővítőkártyák SZÁMÍTÓGÉP FELÉPÍTÉSE
ELŐADÁS 2016-01-05 SZÁMÍTÓGÉP MŰKÖDÉSE FIZIKA ÉS INFORMATIKA A PC FIZIKAI KIÉPÍTÉSÉNEK ALAPELEMEI Chip (lapka) Mikroprocesszor (CPU) Integrált áramköri lapok: alaplap, bővítőkártyák SZÁMÍTÓGÉP FELÉPÍTÉSE
A MINI SZATELLITTŐL A SUMO-ROBOTIG
 A MINI SZATELLITTŐL A SUMO-ROBOTIG Az atomoktól a csillagokig 2018. nov. 29. Pető Mária Székely Mikó Kollégium, Sepsiszentgyörgy MTA-ELTE Fizika Tanítása Kutatócsoport Témáink: Arduino - röviden CanSat-
A MINI SZATELLITTŐL A SUMO-ROBOTIG Az atomoktól a csillagokig 2018. nov. 29. Pető Mária Székely Mikó Kollégium, Sepsiszentgyörgy MTA-ELTE Fizika Tanítása Kutatócsoport Témáink: Arduino - röviden CanSat-
Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez
 Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez Szoftver rádiózás alapjai Mérés helye: Hálózati Rendszerek és Szolgáltatások Tanszék Mobil Kommunikáció és Kvantumtechnológiák
Mérési útmutató a Mobil Kommunikáció és Kvantumtechnológiák Laboratórium méréseihez Szoftver rádiózás alapjai Mérés helye: Hálózati Rendszerek és Szolgáltatások Tanszék Mobil Kommunikáció és Kvantumtechnológiák
A FOGLAKOZÁS ADATAI: SZERZŐ. Vindics Dóra. Vezérelj robotot! A FOGLALKOZÁS CÍME A FOGLALKOZÁS RÖVID
 A FOGLAKOZÁS ADATAI: SZERZŐ Vindics Dóra A FOGLALKOZÁS CÍME Vezérelj robotot! A FOGLALKOZÁS RÖVID LEÍRÁSA A tanulók gyakran nem értik, hogy miért van szükség arra, amit matematika órán tanulnak. Ebben
A FOGLAKOZÁS ADATAI: SZERZŐ Vindics Dóra A FOGLALKOZÁS CÍME Vezérelj robotot! A FOGLALKOZÁS RÖVID LEÍRÁSA A tanulók gyakran nem értik, hogy miért van szükség arra, amit matematika órán tanulnak. Ebben
IDAXA-PiroSTOP HI1 Hurokkezelő 1 intelligens hurokhoz 2004/0177/063 Terméklap
 IDAXA-PiroSTOP HI Hurokkezelő intelligens hurokhoz 24/77/63 Terméklap Hexium Kft. HI Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VEZ EGYSÉG FELÉ... 5 2.3
IDAXA-PiroSTOP HI Hurokkezelő intelligens hurokhoz 24/77/63 Terméklap Hexium Kft. HI Terméklap Rev 2 2 Tartalomjegyzék. ISMERTETŐ... 3 2. HARDVER... 4 2. LED... 5 2.2 KAPCSOLAT A VEZ EGYSÉG FELÉ... 5 2.3
Labor 2 Mikrovezérlők
 Labor 2 Mikrovezérlők ATMEL AVR - ARDUINO BUDAI TAMÁS 2015. 09. 06. Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
Labor 2 Mikrovezérlők ATMEL AVR - ARDUINO BUDAI TAMÁS 2015. 09. 06. Tartalom Mikrovezérlők Mikrovezérlők felépítése, működése Mikrovezérlő típusok, gyártók Mikrovezérlők perifériái Mikrovezérlők programozása
SZAKDOLGOZAT. Kádár Bence Pethe Szabolcs
 SZAKDOLGOZAT Kádár Bence Pethe Szabolcs Debrecen 2011 DEBRECENI EGYETEM INFORMATIKAI KAR Egyensúlyozó robot építése és modellezése Témavezető: Dr. Cserháti Csaba egyetemi docens DE TTK Szilárdtest fizika
SZAKDOLGOZAT Kádár Bence Pethe Szabolcs Debrecen 2011 DEBRECENI EGYETEM INFORMATIKAI KAR Egyensúlyozó robot építése és modellezése Témavezető: Dr. Cserháti Csaba egyetemi docens DE TTK Szilárdtest fizika
Nagy Gergely április 4.
 Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Mikrovezérlők Nagy Gergely BME EET 2012. április 4. ebook ready 1 Bevezetés Áttekintés Az elektronikai tervezés eszközei Mikroprocesszorok 2 A mikrovezérlők 3 Főbb gyártók Áttekintés A mikrovezérlők az
Fizikai mérések Arduino-val
 Fizikai mérések Arduino-val Csajkos Bence, Veres József Csatári László Sándor mentor Megvalósult az Emberi Erőforrások Minisztériuma megbízásából az Emberi Erőforrás Támogatáskezelő a 2015/2016. tanévre
Fizikai mérések Arduino-val Csajkos Bence, Veres József Csatári László Sándor mentor Megvalósult az Emberi Erőforrások Minisztériuma megbízásából az Emberi Erőforrás Támogatáskezelő a 2015/2016. tanévre
Scherer Balázs: Mikrovezérlők fejlődési trendjei
 Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Scherer Balázs: Mikrovezérlők fejlődési trendjei 2009. Budapesti Műszaki és Gazdaságtudományi Egyetem, Méréstechnika
Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Scherer Balázs: Mikrovezérlők fejlődési trendjei 2009. Budapesti Műszaki és Gazdaságtudományi Egyetem, Méréstechnika
NanoDiag KICSI DE ERŐS! TELJESKÖRŰ DIAGNOSZTIKA GYORS ÉS EGYSZERŰ PROFESSZIONÁLIS KISMÉRETŰ KÖLTSÉGHATÉKONY
 NanoDiag NanoDiag KICSI DE ERŐS! TELJESKÖRŰ DIAGNOSZTIKA A járműszerelő műhelyeknek nap mint nap szembesülniük kell azzal a ténnyel, hogy az emissziós, a biztonsági és komfort követelmények miatt a járműgyártók
NanoDiag NanoDiag KICSI DE ERŐS! TELJESKÖRŰ DIAGNOSZTIKA A járműszerelő műhelyeknek nap mint nap szembesülniük kell azzal a ténnyel, hogy az emissziós, a biztonsági és komfort követelmények miatt a járműgyártók
APP & GO. Az innovatív megoldás
 APP & GO Az innovatív megoldás ISOBUS-UT TRACK-Leader ISOBUS-TC SECTION-Control ASD TRACK-Leader AUTO VRC Tartalomjegyzék APP & GO APP & GO Oldal 3 ISOBUS alapú precíziós gazdálkodás APP & GO alkalmazásokkal
APP & GO Az innovatív megoldás ISOBUS-UT TRACK-Leader ISOBUS-TC SECTION-Control ASD TRACK-Leader AUTO VRC Tartalomjegyzék APP & GO APP & GO Oldal 3 ISOBUS alapú precíziós gazdálkodás APP & GO alkalmazásokkal
A területi közigazgatás reformja és az informatika
 Gulyás Róbert főosztályvezető A területi közigazgatás reformja és az informatika Infotér 6. konferencia Balatonfüred, 2015. november 6. A területi közigazgatás reformjának lépései A fővárosi és megyei
Gulyás Róbert főosztályvezető A területi közigazgatás reformja és az informatika Infotér 6. konferencia Balatonfüred, 2015. november 6. A területi közigazgatás reformjának lépései A fővárosi és megyei
Programozási AVR mikrovezérlők a PICKit2 Programozó
 1 / 16 2010.08.13. 0:19 PICKit2 AVRISP Programozási AVR mikrovezérlők a PICKit2 Programozó ÉS használata PICKit2, menta AZ USB - Soros átalakító Otthon Programozási Atmel AVRs a PICKit2 programozó Segítségével
1 / 16 2010.08.13. 0:19 PICKit2 AVRISP Programozási AVR mikrovezérlők a PICKit2 Programozó ÉS használata PICKit2, menta AZ USB - Soros átalakító Otthon Programozási Atmel AVRs a PICKit2 programozó Segítségével
A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe
 Robotika A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe Werner Ágnes Bevezetés Maga a robot szó 1921-ben CARELC CAPEK Rossum Univerzális Robotjai című színdarabjában
Robotika A mesterséges intelligencia alkalmazásának egyik legfontosabb és leglátványosabb területe Werner Ágnes Bevezetés Maga a robot szó 1921-ben CARELC CAPEK Rossum Univerzális Robotjai című színdarabjában
emotionbutterflies Kollektíven mozgó ultrakönnyű repülő szerkezetek
 emotionbutterflies Kollektíven mozgó ultrakönnyű repülő szerkezetek emotionbutterflies Koordinált repülés beltéri GPS segítségével A repülés nemcsak az emberiség egyik legrégebbi álma, hanem a Bionic Learning
emotionbutterflies Kollektíven mozgó ultrakönnyű repülő szerkezetek emotionbutterflies Koordinált repülés beltéri GPS segítségével A repülés nemcsak az emberiség egyik legrégebbi álma, hanem a Bionic Learning
AVR-Duino Eth Shield / AVR-Duino EthMAX Shield
 AVR-Duino Eth Shield / AVR-Duino EthMAX Shield AVR-Duino alappanel-kiegészítő az Ethernet-alapok megismeréséhez Felhasználói dokumentáció TavIR-AVR 2011. május 30. 1 / 11 Felhasználás AVR-Duino Eth Shield
AVR-Duino Eth Shield / AVR-Duino EthMAX Shield AVR-Duino alappanel-kiegészítő az Ethernet-alapok megismeréséhez Felhasználói dokumentáció TavIR-AVR 2011. május 30. 1 / 11 Felhasználás AVR-Duino Eth Shield
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz
 Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Szárazföldi autonóm mobil robotok vezérlőrendszerének kialakítási lehetőségei. Kucsera Péter ZMNE Doktorandusz A mobil robot vezérlőrendszerének feladatai Elvégzendő feladat Kommunikáció Vezérlő rendszer
Önálló laboratórium dokumentáció
 Önálló laboratórium dokumentáció Konzulens: Mészáros Tamás Készítette: Bartók Ferenc (ME12HP) 2012.05.19. Tartalomjegyzék Bevezetés, feladat leírása... 3 A készülék bemutatása, megismerése... 4 Beviteli
Önálló laboratórium dokumentáció Konzulens: Mészáros Tamás Készítette: Bartók Ferenc (ME12HP) 2012.05.19. Tartalomjegyzék Bevezetés, feladat leírása... 3 A készülék bemutatása, megismerése... 4 Beviteli
Programozás és Digitális technika I. Pógár István eng.unideb.hu/pogari
 Programozás és Digitális technika I. Pógár István pogari@eng.unideb.hu eng.unideb.hu/pogari Ajánlott irodalom Massimo Banzi Getting Started with Arduino Michael Margolis Make an Android Controlled Robot
Programozás és Digitális technika I. Pógár István pogari@eng.unideb.hu eng.unideb.hu/pogari Ajánlott irodalom Massimo Banzi Getting Started with Arduino Michael Margolis Make an Android Controlled Robot
Foglalkozási napló. Gazdasági informatikus 14. évfolyam
 Foglalkozási napló a 20 /20. tanévre Gazdasági informatikus 14. évfolyam (OKJ száma: 54 41 02) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Foglalkozási napló a 20 /20. tanévre Gazdasági informatikus 14. évfolyam (OKJ száma: 54 41 02) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
ADATBÁZIS ADMINISZTRÁTOR SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI
 ADATÁZIS ADMINISZTRÁTOR SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ ADATOK 1. A szakképesítés azonosító száma: 54 482 01 2. A szakképesítés megnevezése: Adatbázis
ADATÁZIS ADMINISZTRÁTOR SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ ADATOK 1. A szakképesítés azonosító száma: 54 482 01 2. A szakképesítés megnevezése: Adatbázis
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék DARU IRÁNYÍTÁSA
 Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék DARU IRÁNYÍTÁSA Önálló laboratórium beszámoló Készítette: Menyhárt Balázs BDVUD4
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Irányítástechnika és Informatika Tanszék DARU IRÁNYÍTÁSA Önálló laboratórium beszámoló Készítette: Menyhárt Balázs BDVUD4
EGY KOMPLEX AKKREDITÁLHATÓ VÍZMINŐSÉG TÁVMÉRŐ RENDSZER ALKALMAZÁSA A TORNA PATAK VÍZMINŐSÉGÉNEK ELLENŐRZÉSÉRE
 EGY KOMPLEX AKKREDITÁLHATÓ VÍZMINŐSÉG TÁVMÉRŐ RENDSZER ALKALMAZÁSA A TORNA PATAK VÍZMINŐSÉGÉNEK ELLENŐRZÉSÉRE APPLICATION OF A COMPLEX ACCREDITED WATER QUALITY TELEMETRY SYSTEM FOR MONITORING OF WATER
EGY KOMPLEX AKKREDITÁLHATÓ VÍZMINŐSÉG TÁVMÉRŐ RENDSZER ALKALMAZÁSA A TORNA PATAK VÍZMINŐSÉGÉNEK ELLENŐRZÉSÉRE APPLICATION OF A COMPLEX ACCREDITED WATER QUALITY TELEMETRY SYSTEM FOR MONITORING OF WATER
Szükséges ismeretek: C programozási nyelv; mikrokontrollerek; méréstechnika; analóg és digitális elektronika; LabView
 Pozícióérzékelés szilárd közegben terjedő akusztikus jelek segítségével Ha egy szilárd közeg egy pontján akusztikus jelet keltünk, az a közegben szétterjed és annak több pontján detektálható. A közeg (például
Pozícióérzékelés szilárd közegben terjedő akusztikus jelek segítségével Ha egy szilárd közeg egy pontján akusztikus jelet keltünk, az a közegben szétterjed és annak több pontján detektálható. A közeg (például
A FOGLAKOZÁS ADATAI: SZERZŐ. Virga Krisztina A FOGLALKOZÁS CÍME. Húzd meg jobban, menjen a munka! Modellezzünk raktárt! A FOGLALKOZÁS RÖVID
 A FOGLAKOZÁS ADATAI: SZERZŐ Virga Krisztina A FOGLALKOZÁS CÍME Húzd meg jobban, menjen a munka! Modellezzünk raktárt! A FOGLALKOZÁS RÖVID LEÍRÁSA A foglalkozás egy összetett feladat adott részének megvalósítását
A FOGLAKOZÁS ADATAI: SZERZŐ Virga Krisztina A FOGLALKOZÁS CÍME Húzd meg jobban, menjen a munka! Modellezzünk raktárt! A FOGLALKOZÁS RÖVID LEÍRÁSA A foglalkozás egy összetett feladat adott részének megvalósítását
VERSENYFELHÍVÁS. A verseny célja:
 VERSENYFELHÍVÁS A Hajdúböszörményi Bocskai István Gimnázium, a Kecskeméti Bányai Júlia Gimnázium valamint a Nyugat-magyarországi Egyetem Informatikai és Gazdasági Intézete a Soproni Széchenyi István Gimnáziummal
VERSENYFELHÍVÁS A Hajdúböszörményi Bocskai István Gimnázium, a Kecskeméti Bányai Júlia Gimnázium valamint a Nyugat-magyarországi Egyetem Informatikai és Gazdasági Intézete a Soproni Széchenyi István Gimnáziummal
Korszerű információs technológiák
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Korszerű információs technológiák LEGO ROBOTOK PROGRAMOZÁSA Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, 2018. október 20.
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Korszerű információs technológiák LEGO ROBOTOK PROGRAMOZÁSA Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, 2018. október 20.
Valódi kényeztetés autója számára
 Valódi kényeztetés autója számára E R E D E T I T A R T O Z É K O K A Mopar a Fiat Chrysler Automobiles vállalat szervizeléssel, ügyfélszolgálattal és eredeti alkatrészek forgalmazásával foglalkozó üzletága.
Valódi kényeztetés autója számára E R E D E T I T A R T O Z É K O K A Mopar a Fiat Chrysler Automobiles vállalat szervizeléssel, ügyfélszolgálattal és eredeti alkatrészek forgalmazásával foglalkozó üzletága.
Foglalkozási napló. Gépjármű mechatronikus 11. évfolyam
 Foglalkozási napló a 20 /20. tanévre Gépjármű mechatronikus 11. évfolyam (OKJ száma: 34 525 02) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Foglalkozási napló a 20 /20. tanévre Gépjármű mechatronikus 11. évfolyam (OKJ száma: 34 525 02) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Optikai tuning OLDALSÓ KÜSZÖB SPOILER ** ELSŐ SPOILER ** * OLDALSÓ LÉGTERELŐK AZ ELSŐ ABLAKOKRA. Kizárólag Alfa Romeo 147 (2004 évjárat)
") Alfa Romeo 147 Optikai tuning ELSŐ SPOILER ** Kizárólag Alfa Romeo 147 évjárat 2004 OLDALSÓ KÜSZÖB SPOILER ** Kizárólag Alfa Romeo 147 (2004 évjárat) * OLDALSÓ LÉGTERELŐK AZ ELSŐ ABLAKOKRA 3 ajtós változathoz
Alfa Romeo 147 Optikai tuning ELSŐ SPOILER ** Kizárólag Alfa Romeo 147 évjárat 2004 OLDALSÓ KÜSZÖB SPOILER ** Kizárólag Alfa Romeo 147 (2004 évjárat) * OLDALSÓ LÉGTERELŐK AZ ELSŐ ABLAKOKRA 3 ajtós változathoz
2006. május www.lexmark.com
 350 Series Bevezetés 2006. május www.lexmark.com A Lexmark és a rombusz alakú emblémával ellátott Lexmark név a Lexmark International, Inc. bejegyzett védjegye az Egyesült Államokban és/vagy más országokban.
350 Series Bevezetés 2006. május www.lexmark.com A Lexmark és a rombusz alakú emblémával ellátott Lexmark név a Lexmark International, Inc. bejegyzett védjegye az Egyesült Államokban és/vagy más országokban.
OMNIALOG adatgyűjtők NI-48XX
 OMNIALOG adatgyűjtők NI-48XX Alkalmazások Ipari monitorozás Klímatechnikai monitorozás Olaj- és gázmonitorozás Vízminőség monitorozás Épületmonitorozás Villamos hálózat monitorozás OMNIAlog A Next Industries
OMNIALOG adatgyűjtők NI-48XX Alkalmazások Ipari monitorozás Klímatechnikai monitorozás Olaj- és gázmonitorozás Vízminőség monitorozás Épületmonitorozás Villamos hálózat monitorozás OMNIAlog A Next Industries
ARM Cortex magú mikrovezérlők
 ARM Cortex magú mikrovezérlők Tárgykövetelmények, tematika Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 Lehetőségek: o Hardware
ARM Cortex magú mikrovezérlők Tárgykövetelmények, tematika Scherer Balázs Budapest University of Technology and Economics Department of Measurement and Information Systems BME-MIT 2016 Lehetőségek: o Hardware
Felhasználói útmutató
 Felhasználói útmutató Copyright 2016 HP Development Company, L.P. A Bluetooth a jogtulajdonos védjegye, amelyet a HP Inc. licencmegállapodás keretében használ. Az Intel, a Celeron és a Pentium az Intel
Felhasználói útmutató Copyright 2016 HP Development Company, L.P. A Bluetooth a jogtulajdonos védjegye, amelyet a HP Inc. licencmegállapodás keretében használ. Az Intel, a Celeron és a Pentium az Intel
Csökkentse minimálisra fázisvezérelt és TOFD készülékekre költött kiadásait
 Csökkentse minimálisra fázisvezérelt és TOFD készülékekre költött kiadásait A SIUI legmodernebb ultrahangos hibakeresője, egyetlen kompakt és időtálló készülékben egyesíti a nagyteljesítményű fázisvezérelt
Csökkentse minimálisra fázisvezérelt és TOFD készülékekre költött kiadásait A SIUI legmodernebb ultrahangos hibakeresője, egyetlen kompakt és időtálló készülékben egyesíti a nagyteljesítményű fázisvezérelt
ELEKTRONIKAI MŰSZERÉSZ MESTERVIZSGA KÖVETELMÉNYEI
 ELEKTRONIKAI MŰSZERÉSZ MESTERVIZSGA KÖVETELMÉNYEI I. Az elektronikai műszerész mestervizsgára jelentkezés feltételei 1. Az elektronikai műszerész mestervizsgához szükséges szakképesítési feltételek Az
ELEKTRONIKAI MŰSZERÉSZ MESTERVIZSGA KÖVETELMÉNYEI I. Az elektronikai műszerész mestervizsgára jelentkezés feltételei 1. Az elektronikai műszerész mestervizsgához szükséges szakképesítési feltételek Az
ÓBUDAI EGYETEM Neumann János Informatikai Kar Informatikai Rendszerek Intézet Témavezető: Bringye Zsolt
 Témavezető: Bringye Zsolt Diplomamunka/szakdolgozat címe: X64 szerver virtualizáció technológiai kérdéseinek áttekintése, kereskedelmi termékekben történő megvalósításuk elemzése (funkcionalitás, teljesítmény,
Témavezető: Bringye Zsolt Diplomamunka/szakdolgozat címe: X64 szerver virtualizáció technológiai kérdéseinek áttekintése, kereskedelmi termékekben történő megvalósításuk elemzése (funkcionalitás, teljesítmény,
A tételekhez segédeszköz nem használható.
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a 4. Szakmai követelmények fejezetben szereplő szakmai követelménymodulok témaköreit tartalmazza A tételekhez
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a 4. Szakmai követelmények fejezetben szereplő szakmai követelménymodulok témaköreit tartalmazza A tételekhez
ROBOTIKA FELADATGYŰJTEMÉNY
 Kiss Róbert ROBOTIKA FELADATGYŰJTEMÉNY 111 feladat LEGO MINDSTORMS EV3 és NXT robotokhoz A könyv elektronikus változatának kiadása a H-Didakt Kft. jóvoltából jöhetett létre 2016 H-Didakt Kft 1162 Budapest,
Kiss Róbert ROBOTIKA FELADATGYŰJTEMÉNY 111 feladat LEGO MINDSTORMS EV3 és NXT robotokhoz A könyv elektronikus változatának kiadása a H-Didakt Kft. jóvoltából jöhetett létre 2016 H-Didakt Kft 1162 Budapest,
Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban. Előadó: Kincses Zoltán
 Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban Előadó: Kincses Zoltán Bevezetés A mote-ok földrajzi helymeghatározása fontos helymeghatározó rendszerekben érzékelő és jelző alkalmazásokban
Akusztikus távolság meghatározás a vezeték nélküli szenzor hálózatokban Előadó: Kincses Zoltán Bevezetés A mote-ok földrajzi helymeghatározása fontos helymeghatározó rendszerekben érzékelő és jelző alkalmazásokban
Gyümölcsöző megoldások
 Gyümölcsöző megoldások Mi mindenre használható egy bankkártya méretű számítógép? Németh Gábor www.rpibolt.hu Mi is az a Raspberry PI? Raspberry PI Foundation Bankkártya méretű számítógép TV-re, monitorra
Gyümölcsöző megoldások Mi mindenre használható egy bankkártya méretű számítógép? Németh Gábor www.rpibolt.hu Mi is az a Raspberry PI? Raspberry PI Foundation Bankkártya méretű számítógép TV-re, monitorra
A hordozható számítógép bemutatása Felhasználói útmutató
 A hordozható számítógép bemutatása Felhasználói útmutató Copyright 2008 Hewlett-Packard Development Company, L.P. A Microsoft és a Windows elnevezés a Microsoft Corporation Amerikai Egyesült Államokban
A hordozható számítógép bemutatása Felhasználói útmutató Copyright 2008 Hewlett-Packard Development Company, L.P. A Microsoft és a Windows elnevezés a Microsoft Corporation Amerikai Egyesült Államokban
Forgácsoló gyártócellák, gyártórendszerek 2.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
BT-R800 Használati utasítás BT-R800 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1
 BT-R800 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
BT-R800 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
A Netburner fejlesztőeszköz alkalmazástechnikája
 5.2.1. A Netburner fejlesztőeszköz alkalmazástechnikája A NetBurner vállalatról A NetBurner vállalatot ##LINK: http://netburner.com ## 1998-ban alapították. A kezdetekben hálózati eszközökhöz programozó
5.2.1. A Netburner fejlesztőeszköz alkalmazástechnikája A NetBurner vállalatról A NetBurner vállalatot ##LINK: http://netburner.com ## 1998-ban alapították. A kezdetekben hálózati eszközökhöz programozó
Szakdolgozat. EMG vezérlésű egyszerűsített alkar protézis fejlesztése
 Miskolci Egyetem Gépészmérnöki és Informatikai Kar Robert Bosch Mechatronikai Tanszék Szakdolgozat EMG vezérlésű egyszerűsített alkar protézis fejlesztése Készítette: Mezei Miklós Konzulens: Lénárt József
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Robert Bosch Mechatronikai Tanszék Szakdolgozat EMG vezérlésű egyszerűsített alkar protézis fejlesztése Készítette: Mezei Miklós Konzulens: Lénárt József
GQ-3x és GQ-4x USB univerzális programozó Kézikönyv
 GQ-3x és GQ-4x USB univerzális programozó Kézikönyv Magyar fordítás EPROMIROK.HU 2011.10.27. 1 GQ-3X és GQ-4X programozó kézikönyv Üdvözöljük a GQ USB Univerzális Programozó (True-USB Univerzális eszköz
GQ-3x és GQ-4x USB univerzális programozó Kézikönyv Magyar fordítás EPROMIROK.HU 2011.10.27. 1 GQ-3X és GQ-4X programozó kézikönyv Üdvözöljük a GQ USB Univerzális Programozó (True-USB Univerzális eszköz
SZERZŐ: Kiss Róbert. Oldal1
 A LOGO MindStorms NXT/EV3 robot grafikus képernyőjét használva különböző ábrákat tudunk rajzolni. A képek létrehozásához koordináta rendszerben adott alakzatok (kör, téglalap, szakasz, pont) meghatározó
A LOGO MindStorms NXT/EV3 robot grafikus képernyőjét használva különböző ábrákat tudunk rajzolni. A képek létrehozásához koordináta rendszerben adott alakzatok (kör, téglalap, szakasz, pont) meghatározó
INFORMATIKA 1-4. évfolyam
 INFORMATIKA 1-4. évfolyam Célok - A számítógépes munkaszabályainak és a legfontosabb balesetvédelmi előírások megismerése. - A számítógép és perifériáinak kezelési tudnivalóinak megismerése. - Az életkoruknak
INFORMATIKA 1-4. évfolyam Célok - A számítógépes munkaszabályainak és a legfontosabb balesetvédelmi előírások megismerése. - A számítógép és perifériáinak kezelési tudnivalóinak megismerése. - Az életkoruknak
Alfa Romeo 159 Alfa Romeo 159 Sportwagon
 Alfa Romeo 159 Alfa Romeo 159 Sportwagon Optikai tuning ELSŐ SPOILER ** Cikkszám: 50903083 HÁTSÓ SPOILER ** Tartalmazza a harmadik féklámpát. Szükséges a 50507804 cikkszám felszerelése. Cikkszám: 50903089
Alfa Romeo 159 Alfa Romeo 159 Sportwagon Optikai tuning ELSŐ SPOILER ** Cikkszám: 50903083 HÁTSÓ SPOILER ** Tartalmazza a harmadik féklámpát. Szükséges a 50507804 cikkszám felszerelése. Cikkszám: 50903089
IFFK 2011 Budapest, 2011. augusztus 29-31. Biogáz laboratórium fejlesztése
 IFFK 2011 Budapest, 2011. augusztus 29-31. Biogáz laboratórium fejlesztése Bakosné Diószegi Mónika, dr. Hováth Miklós, dr. Legeza László * * Óbudai Egyetem, Bánki Donát Gépész és Biztonságtechnikai Mérnöki
IFFK 2011 Budapest, 2011. augusztus 29-31. Biogáz laboratórium fejlesztése Bakosné Diószegi Mónika, dr. Hováth Miklós, dr. Legeza László * * Óbudai Egyetem, Bánki Donát Gépész és Biztonságtechnikai Mérnöki
OTTHONI FELHASZNÁLÁSRA TERVEZETT NYITÓ SZETT
 TOLÓKAPU NYITÓ SZETT OTTHONI FELHASZNÁLÁSRA TERVEZETT KIT PL1000 TOLÓKAPU NYITÓ SZETT A PL1000 elektro-mechanikus tolókapu nyitó szettet otthoni felhasználásra tervezték. A hajtómotor ízléses megjelenésű
TOLÓKAPU NYITÓ SZETT OTTHONI FELHASZNÁLÁSRA TERVEZETT KIT PL1000 TOLÓKAPU NYITÓ SZETT A PL1000 elektro-mechanikus tolókapu nyitó szettet otthoni felhasználásra tervezték. A hajtómotor ízléses megjelenésű
Bevezetés. Személygépjárművek. Fedélzeti elektromos rendszer. Hagyományos 12V-os rendszerek
 Bevezetés Napjainkban az egyik legfontosabb iparág a járműipar, mely biztos alapot teremt a mobilitás, az emberek és tárgyak egyszerű mozgatása, szállítása számára. A járműipart több részre oszthatjuk
Bevezetés Napjainkban az egyik legfontosabb iparág a járműipar, mely biztos alapot teremt a mobilitás, az emberek és tárgyak egyszerű mozgatása, szállítása számára. A járműipart több részre oszthatjuk
Mérési útmutató. A/D konverteres mérés. // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait.
 Mérési útmutató A/D konverteres mérés 1. Az A/D átalakítók főbb típusai és rövid leírásuk // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait. Csoportosítás polaritás szempontjából:
Mérési útmutató A/D konverteres mérés 1. Az A/D átalakítók főbb típusai és rövid leírásuk // Első lépésként tanulmányozzuk a digitális jelfeldolgozás előnyeit és határait. Csoportosítás polaritás szempontjából:
Nem romboló régészeti módszerek a paletta
 Nem romboló régészeti módszerek a paletta Légirégészet Képelemzés Geodézia UAV GIS fotó3d Terepbejárás Próbaásatás Geofizikai mérés Régészeti célú légi felderítés Képelemzés Jelenségek bemérése gabonában
Nem romboló régészeti módszerek a paletta Légirégészet Képelemzés Geodézia UAV GIS fotó3d Terepbejárás Próbaásatás Geofizikai mérés Régészeti célú légi felderítés Képelemzés Jelenségek bemérése gabonában
Mérő- és vezérlőberendezés megvalósítása ARM alapú mikrovezérlővel és Linux-szal
 Mérő- és vezérlőberendezés megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. július 18. A mérőberendezés felhasználási
Mérő- és vezérlőberendezés megvalósítása ARM alapú mikrovezérlővel és Linux-szal Fuszenecker Róbert Budapesti Műszaki Főiskola Kandó Kálmán Műszaki Főiskolai Kar 2007. július 18. A mérőberendezés felhasználási
Nemzeti Alaptanterv Informatika műveltségterület Munkaanyag. 2011. március
 Nemzeti Alaptanterv Informatika műveltségterület Munkaanyag 2011. március 1 Informatika Alapelvek, célok Az információ megszerzése, megértése, feldolgozása és felhasználása, vagyis az információs műveltség
Nemzeti Alaptanterv Informatika műveltségterület Munkaanyag 2011. március 1 Informatika Alapelvek, célok Az információ megszerzése, megértése, feldolgozása és felhasználása, vagyis az információs műveltség
Optikai tuning Idea ELSŐ LÖKHÁRÍTÓ SPOILER ** Cikkszám: 50901197 SPOILER SZETT A SÁRVÉDŐRE ** Cikkszám: 50901194
 Idea és Multipla Optikai tuning Idea ELSŐ LÖKHÁRÍTÓ SPOILER ** Cikkszám: 50901197 SPOILER SZETT A SÁRVÉDŐRE ** Cikkszám: 50901194 2 Optikai tuning Idea CSOMAGTÉR AJTÓ SPOILER ** Cikkszám: 50901195 OLDALSÓ
Idea és Multipla Optikai tuning Idea ELSŐ LÖKHÁRÍTÓ SPOILER ** Cikkszám: 50901197 SPOILER SZETT A SÁRVÉDŐRE ** Cikkszám: 50901194 2 Optikai tuning Idea CSOMAGTÉR AJTÓ SPOILER ** Cikkszám: 50901195 OLDALSÓ
Bevitel-Kivitel. Bevitel-Kivitel és Perifériák. Algoritmusok és Alkalmazásaik Tanszék Budapest. 2005. december 16.
 Architektúrák és operációs rendszerek Balogh Ádám, Lőrentey Károly Eötvös Loránd Tudományegyetem Algoritmusok és Alkalmazásaik Tanszék Budapest 2005. december 16. Tartalomjegyzék Perifériák 1 Perifériák
Architektúrák és operációs rendszerek Balogh Ádám, Lőrentey Károly Eötvös Loránd Tudományegyetem Algoritmusok és Alkalmazásaik Tanszék Budapest 2005. december 16. Tartalomjegyzék Perifériák 1 Perifériák
Figyelmeztetés: Az alábbi merevlemez-meghajtók telepítése nem ajánlott ebbe a készülékbe:
 Figyelmeztetés: Amennyiben egy új merevlemez-meghajtót szeretne telepíteni ebbe a készülékbe, úgy vegye figyelembe a tesztelt, kompatibilis merevlemez-meghajtók jegyzékét az alábbiak szerint: Figyelmeztetés:
Figyelmeztetés: Amennyiben egy új merevlemez-meghajtót szeretne telepíteni ebbe a készülékbe, úgy vegye figyelembe a tesztelt, kompatibilis merevlemez-meghajtók jegyzékét az alábbiak szerint: Figyelmeztetés:
Linuxot mindenre - Raspberry Pi
 Linuxot mindenre - Raspberry Pi Valastyán Attila Linux az Oktatásban Konferencia 2013. október 19. Bemutatkozás Valastyán Attila vales@galaktikaradio.hu Rendszergazda: szerver és hálózatüzemeltetés Hobbista:
Linuxot mindenre - Raspberry Pi Valastyán Attila Linux az Oktatásban Konferencia 2013. október 19. Bemutatkozás Valastyán Attila vales@galaktikaradio.hu Rendszergazda: szerver és hálózatüzemeltetés Hobbista:
Leírás. Készítette: EMKE Kft. 2009. február 11.
 Leírás Alkalmas: Jármővek mozgásának valós idejő nyomkövetését biztosító kommunikációra. A mozgás koordinátáinak eltárolására, utólagos visszaellenırzésére (pl. sebesség túllépés, vagy bejárt útvonal).
Leírás Alkalmas: Jármővek mozgásának valós idejő nyomkövetését biztosító kommunikációra. A mozgás koordinátáinak eltárolására, utólagos visszaellenırzésére (pl. sebesség túllépés, vagy bejárt útvonal).
GeoMax újratöltve. Földmérő Nap Pécs 2014 GeoSite Kft Horváth Zsolt
 GeoMax újratöltve Földmérő Nap Pécs 2014 GeoSite Kft Horváth Zsolt 1 2 www.geosite.hu 3 www.geosite.hu Értékesítés és Support Ahogy Önök mindig is szerették volna? 4 Értékesítés és Support Ahogy Önök mindig
GeoMax újratöltve Földmérő Nap Pécs 2014 GeoSite Kft Horváth Zsolt 1 2 www.geosite.hu 3 www.geosite.hu Értékesítés és Support Ahogy Önök mindig is szerették volna? 4 Értékesítés és Support Ahogy Önök mindig
LEGO robotok 18 2014-2015/1
 LEGO robotok I. rész Bevezető A robot egy elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására. A robotok lehetnek közvetlen emberi irányítás alatt,
LEGO robotok I. rész Bevezető A robot egy elektromechanikai szerkezet, amely előzetes programozás alapján képes különböző feladatok végrehajtására. A robotok lehetnek közvetlen emberi irányítás alatt,
Sajtófigyelés a pécsi NI átadó kapcsán
 Sajtófigyelés a pécsi NI átadó kapcsán 2015. december 15., kedd A pécsi Ni ünnepélyes adományozás kapcsán összesen 95 megjelenést regisztráltunk, melyből az InfoVárosok online lapcsoport különböző felületein
Sajtófigyelés a pécsi NI átadó kapcsán 2015. december 15., kedd A pécsi Ni ünnepélyes adományozás kapcsán összesen 95 megjelenést regisztráltunk, melyből az InfoVárosok online lapcsoport különböző felületein
GPT 9800 sorozatú nagyfeszültségű szigetelésvizsgálók
 GPT 9800 sorozatú nagyfeszültségű szigetelésvizsgálók Főbb jellemzők 200 VA AC vizsgáló teljesítmény 240X64 mm-es jég kék pont mátrix LCD Kézi/Auto üzemmód Funkció gombok a gyors választáshoz Nagy intenzitású
GPT 9800 sorozatú nagyfeszültségű szigetelésvizsgálók Főbb jellemzők 200 VA AC vizsgáló teljesítmény 240X64 mm-es jég kék pont mátrix LCD Kézi/Auto üzemmód Funkció gombok a gyors választáshoz Nagy intenzitású
Szenzorhálózatok Szenzorhálózatok alkalmazásai (2011.12.03)
") Szenzorhálózatok Szenzorhálózatok alkalmazásai (2011.12.03) Vidács Attila Távközlési és Médiainformatikai Tanszék I.E.325, T:19-25, vidacs@tmit.bme.hu Alkalmazási területek Alkalmazási területek Katasztrófaelhárítás
Szenzorhálózatok Szenzorhálózatok alkalmazásai (2011.12.03) Vidács Attila Távközlési és Médiainformatikai Tanszék I.E.325, T:19-25, vidacs@tmit.bme.hu Alkalmazási területek Alkalmazási területek Katasztrófaelhárítás