Ipari Robotok Programozása
|
|
|
- Brigitta Papné
- 8 évvel ezelőtt
- Látták:
Átírás
1 Ipari Robotok Programozása Vezérlő, StartUp, Szoftverszintek, programozási nyelvek Előadó: Nagy István n (A65) Gyakorlatvezető: : Tolnai András Ajánlott irodalom: B. Leatham-Jones: Elements of Industrial Robotics, Pitman Publishing,, Ch. Blume,, W. Jakob: : Ipari Robotok Programozási Nyelvei, MK, Bp., 1987.

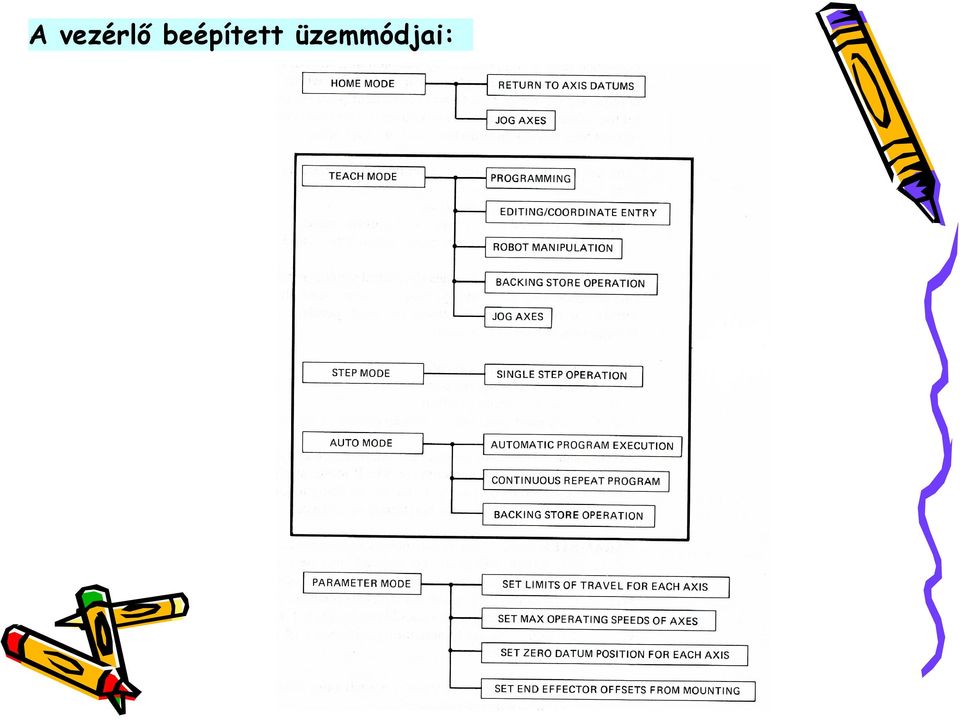
2 A vezérlő beépítet lehetőségei: Gyakran találunk az ipari robotok vezérlőiben beépített funkciókat is. Ezek többnyire a vezérlő működési módozataira vonatkoznak, amelyek az operátor segítségével be-/ kikapcsolhatóak. Továbbá a vezérlők gyakran el vannak látva kisebb kijelzőkkel, ahol hibaüzeneteket, illetve a működési módokhoz tartozó üzeneteket olvashatjuk le. A működési módozatok vezérlőként eltérhetnek (általában el is térnek), de néhány jellegzetes mód mindegyikben (ilyen vagy olyan formában) megtalálható. Homing Nullpontra állítás: Ebben a működési rezsimben a tengelyeket a fizikai vagy az elektronikus nullpontra (homing position) állítjuk. Vigyázni kell, hogy mikor a nullpontra állítjuk a tengelyeket ne ütközzenek akadályba, ezért mielőtt elindítjuk a folyamatot, érdemes a tengelyeket a nullpont közelébe állítani kézi működtetéssel (jog mode). Ha van kijelzőnk, akkor a következő adatokat olvashatjuk le: csuklók pozíciója / koordináták pozíciója / dátum és idő / beépített számlálók, időzítők értékei / I/O bitek értékei. Betanítási (Teach) mód (rezsim): Lehetőséget ad a betanítási szekvenciák elvégzése után, a betanított adatok (szekvenciák) memóriában való rögzítésére. A betanítás lehet közvetlen, közvetett, vagy a koordináták beadásával is. A kijelző a következő adatokat mutathatja: az aktuálisan tárolt szekvencia program / aktuális csukló és koordináta pozíciókat / beépített számlálók, időzítők értékei / I/O állapotbitek. Léptető mód (rezsim): lehetővé teszi a memóriában lévő program lépésenkénti futtatását. Ezt a rezsimet általában a vezérlőn egy gomb segítségével beállíthatjuk. A kijelzőn megjelenő adatok: lépések száma / aktuális lépés száma / aktuális koordináta, csukló pozíciók, Automatikus üzemmód: A memóriában tárolt program automatikus futtatása. A kijelző csak jelzi, hogy automatikus üzemben működik a vezérlő. Paraméteres üzem: ebben az üzemmódban állíthatjuk be a vezérlő belső paramétereit. Ezek a paraméterek általában a gyártó által be vannak állítva, de amennyiben változtatni kell rajtuk, akkor azt ebben az üzemben tehetjük meg. Tipikus paraméter-beállítások a következőket tartalmazzák: tengelyenkénti végállások megadása vészjelzés leadása a végálláshoz közeledve / maximális sebességek, nyomatékok megadása külön a léptető, majd az automata üzemmódokra / tengelyenkénti nullpozíciók esetleg a hozzájuk tartozó megfogó offset-ek / kommunikációs (RS 232) beállítások
, de néhány jellegzetes mód mindegyikben (ilyen vagy olyan formában) megtalálható.")
3 A vezérlő beépített üzemmódjai:
4 StartUp - a robot indítási folyamata 1: Robotonként eltérhet a beindítás folyamata, de egy általános leírás amit az indítási folyamatot megelőzően mindenképpen figyelembe kell venni: - Eltávolítani a munkatérből a nem feltérképezett akadályokat - Felszabadítani a megfogót - Figyelmet szentelni, hogy a feltérképezett munkatérben az akadályok a térkép szerinti helyükön legyen. - A betanító-panel és egyéb dolgok amit az operátor használ, a munkatéren kívül legyenek. - Bebiztosítani, hogy az operátoron kívül más személy ne tartózkodjon a robot körüli zónában. - Bebiztosítani a kábelezések csövezések fixálását (ne legyen szabadon lengő rész). - Bebiztosítani, hogy a robot karbantartása biztonságos legyen. - Ellenőrizni a hidraulikus / pneumatikus nyomásokat, összetételeket (ne szivárogjanak). - Folyadékszintek ellenőrzése (ha szükséges). - Ellenőrizni az operátor munkaruháját ( ne lebegjen biztonságos legyen). Miután a fentieket figyelembe véve elindítottuk a robotot, a léptető rezsim segítségével a nullpont-pozíció közelébe léptethetjük a robotkart. (Ez azért fontos, hogy minél rövidebb utat tegyen meg a robotkar, mikor megkapja a HOMING parancsot.) FIGYELEM! : Minden programot ajánlatos a HOMING paranccsal kezdeni! Ez ugyanis egy közös referenciapont a manipulátor és az operátor számára is, amihez képest az összes többi koordináta kiszámolásra kerül.
. - Bebiztosítani, hogy a robot karbantartása biztonságos legyen.")
5 StartUp - a robot indítási folyamata 2: A programírásnál a következő tipikus eseménysorozatot kell figyelembe venni: 1. A vezérlő memóriájában lévő adatok törlése 2. Paraméterek beállítása: 1. Maximális sebességek / pozíciók / fordulatszámok 2. Megfogó méreteinek beállítása 3. A betanító-panel segítségével mozgasd oda a robotkart a null-pozícióba. 4. Program megírása (az érzékelők válaszjeleinek figyelembevételével). 5. A megfogót működtető program megírása. 6. A 3 5 pontok ismétlése, amíg az egész program el nem készül. 7. Program befejezés: vissza a null-pozícióra, és átállás manuális (kézi) vezérlésre. 8. A memóriában lévő adatok (pozíciók, szekvenciák, I/O adatok ) ellenőrzése. 9. Paraméter-adatok újraellenőrzése (valamelyik program-szekvencia véletlenül nem írta-e át). 10. Program futtatása léptető üzemben. 11. (Amennyiben minden rendben), program futtatása (végtelen ciklusban amíg kézileg nincs leállítva) automata üzemmódban.
 vezérlésre. 8. A memóriában lévő adatok (pozíciók, szekvenciák, I/O adatok ) ellenőrzése. 9.")
6 Szoftverszintek: Hasonlóan, mint a klasszikus programozási eljárásoknál, itt is megvannak a különböző szoftverszintek. A felhasználó (programozó) által megírt programot utasítások sorrendjének (szekvencia) is nevezik. Ezek az utasítások lehetnek: - fizikai szinten megadva (csak számok bináris, oktális, hexadecimális; ahol az utasítás is egy számkód és a pozíciók is számkódokból állnak. Nincs fordító, csak egy ún. értelmező, amely a számkódokat végrehajtja). Ezt gépi kódú programozásnak is nevezik. -Assembler szintű programozás: Az utasítás assembler szintű (move, jump, cmp ), az operandusoknál pedig általában regisztereket címzünk és az értékeket regiszterekbe helyezzük el. -Robot-programozó nyelveken való programozás: általában adva vannak bizonyos parancsszavak (megfog, elenged, ) amelyekkel dolgozhatunk, és a programnyelv leírásában pedig megtaláljuk, hogy a pozíciókat milyen formában lehet megadni (pl.: nem pozíciókat, hanem érzékelő értékeket adunk meg, amit persze át kell konvertálnunk skálázás-, hogy tudjuk, hogy: 1 érték hány [mm], vagy hány fordulat). Itt sincs fordító, a vezérlőben az említett parancsszavaknak megvan a kódszámú értelmezése. (Ezt általában a vezérlő operációs rendszerének hívják = a parancs-szavak értelmezése gépi kódra) -Magas szintű nyelveken való robotprogramozás: Klasszikus programnyelvek, melyek közül a robotprogramozásban a legelterjedtebbek: Basic, Pascal, C++,
. Ezt gépi kódú programozásnak is nevezik.")
7 Robot-programozási nyelvek: Egyenlőre, csak a robot-programozási nyelvek (amennyiben még ezek nem holt nyelvek) általános felépítéséről teszünk említést. Ezek a nyelvek valahol az assembler (mnemonic kód) típusú és a magas-szintű nyelvek között foglalnak helyet. Mivel kimondottan robotműveletekre vannak kitalálva, így a nyelv szókincse is ehhez van igazítva. Több nyelv különböző robotvezérlő berendezés (firmware). MEGJEGYZÉS: Az igazság, hogy a modern robot-programozási nyelvek úgy mint a robot programozás isegyre inkább tendál a mai magas-szintű programnyelvekhez, vagy ha a vezérlő PLC, akkor a PLC programnyelvéhez, vagy ha csak mikrokontrollerrel vezérlünk, akkor a mikrokontroller programnyelvéhez (nagyon sok kontroller magas-szintű, C++, nyelven is programozható). A robot-programozó nyelvek általános struktúrája valójában csak 3 alapstruktúra létezik ezekben a nyelvekben (sorrend, -szekvencia-; ismétlések, ciklus-; elágazások, ugrások-): - Szekvencia : Olyan instrukciók halmaza, melyeket sorrendben egymás után kell végrehajtani. Itt a sorok (lépések) számozva vannak, hogy tudjuk melyik lépést hajtjuk végre. Ezek a számok (indexek) nagyon fontosak tudjuk az instrukció relatív helyzetét is a memóriában; ismerjük a végrehajtási sorrendet. - Ismétlések : Ismételten végrehajtandó instrukciók halmaza = ciklus. Általában kisebb lépés-szám többszöri ismétléséről van szó. A folyamat nagyjából a következő: 1. Olvasd be a sor indexét 2. Hajtsd végre az instrukciót 3. Ez az utolsó ciklus =? 1. IGEN vissza a főprogramba 2. NEM vissza a 2. pontra - Elágazások : Ezzel valójában a programok intelligencia-fokát is meghatározhatjuk. Valójában ez nem más, mint a feltételes / feltétel nélküli ugrás. - Feltételes: a feltétel kiértékelése után ugrás, pl.: kiugrás a ciklusból. - Feltétel nélküli: azonnali ugrás a megadott helyre. Az ugrások lehetnek, a végrehajtási sorrendet figyelembe véve: előre ugrás, illetve hátra ugrás. Az ugrásoknál, ciklusoknál kihasználjuk a belső számlálók, időzítők értékeit.

8 Programfejlesztés: A különböző programstruktúrák mellett a robotprogramozó nyelvek is tartalmaznak különböző adatstruktúrákat is: INTEGER, REAL, CHARACTER, LOGICAL A programfejlesztésben nagy segítséget nyújt számunkra, ha előzőleg megszerkesztjük a megírni kívánt program folyamatábráját. Ez a következő előnyökkel járhat: -Jobban tudunk koncentrálni a végrehajtandó feladatra (nem veszünk el a részletekben) -Erősíti a logikai tervezésünket, kiemeli az esetleges ismétléseket, redundanciákat. -A későbbiekben mint dokumentáció is használható a későbbi fejlesztésekhez fejlesztőmérnökök -A későbbiekben mint dokumentáció is használható a robot működésének megmagyarázása a felhasználóknak. -Ciklusok pontosabb definiálása. A folyamatábráknak megvannak a maga szimbólumai (lásd ábra), az összekötések pedig irányítottak, a folyamat végrehajtási sorrendjét mutatják. Nagyban meggyorsíthatja a programfejlesztést, ha moduláris programokban gondolkozunk. -Itt az egyes modulokat is fel tudjuk tüntetni a folyamatábrában effektívebb programozás -A modulokból könyvtárakat tudunk létrehozni, így utána más programokban is felhasználhatóak lesznek.

9 Egy tipikus folyamatábra: Egy kettős ciklust tartalmazó folyamatábra látható a képen.

4. Programozási nyelvek osztályozása. Amatőr és professzionális
 4. Programozási nyelvek osztályozása. Amatőr és professzionális programozási nyelvek. Számítási modellek (Neumann-elvű, automataelvű, funkcionális, logikai). Programozási nyelvekkel kapcsolatos fogalmak
4. Programozási nyelvek osztályozása. Amatőr és professzionális programozási nyelvek. Számítási modellek (Neumann-elvű, automataelvű, funkcionális, logikai). Programozási nyelvekkel kapcsolatos fogalmak
CNC technika. segédlet a CNC tantárgy oktatásához. Készítette: Paróczai János 2005.12.08
 CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
Mérlegelés Kártyaolvasóval
 METRISoft Mérleggyártó KFT PortaWin (PW2) Jármű mérlegelő program 6800 Hódmezővásárhely Jókai u. 30 Telefon: (62) 246-657, Fax: (62) 249-765 e-mail: merleg@metrisoft.hu Web: http://www.metrisoft.hu Módosítva:
METRISoft Mérleggyártó KFT PortaWin (PW2) Jármű mérlegelő program 6800 Hódmezővásárhely Jókai u. 30 Telefon: (62) 246-657, Fax: (62) 249-765 e-mail: merleg@metrisoft.hu Web: http://www.metrisoft.hu Módosítva:
Érintkezés nélküli érzékelés és mérés robotcellában
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Villamosmérnöki és Informatikai kar Irányítástechnika és Informatika Tanszék Folyamatirányítás Laboratórium Érintkezés nélküli érzékelés és mérés robotcellában
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Villamosmérnöki és Informatikai kar Irányítástechnika és Informatika Tanszék Folyamatirányítás Laboratórium Érintkezés nélküli érzékelés és mérés robotcellában
I. A VEZÉRLŐ AUTOMATIKA HELYÉNEK KIVÁLASZTÁSA
 Az ESP modulos vezérlő automatika ideális házi kertek és kisebb méretű közterületek öntözőrendszerének vezérlésre. Kültéren és beltéren egyaránt felszerelhető. Az alapegység bővítő modulok nélkül négy
Az ESP modulos vezérlő automatika ideális házi kertek és kisebb méretű közterületek öntözőrendszerének vezérlésre. Kültéren és beltéren egyaránt felszerelhető. Az alapegység bővítő modulok nélkül négy
Programozható logikai vezérlõk
 BUDAPESTI MÛSZAKI EGYETEM KÖZLEKEDÉSMÉRNÖKI KAR KÖZLEKEDÉSAUTOMATIKAI TANSZÉK Programozható logikai vezérlõk Segédlet az Irányítástechnika I. c. tárgyhoz Összeállította: Szabó Géza egyetemi tanársegéd
BUDAPESTI MÛSZAKI EGYETEM KÖZLEKEDÉSMÉRNÖKI KAR KÖZLEKEDÉSAUTOMATIKAI TANSZÉK Programozható logikai vezérlõk Segédlet az Irányítástechnika I. c. tárgyhoz Összeállította: Szabó Géza egyetemi tanársegéd
Értékelés Összesen: 100 pont 100% = 100 pont A VIZSGAFELADAT MEGOLDÁSÁRA JAVASOLT %-OS EREDMÉNY: EBBEN A VIZSGARÉSZBEN A VIZSGAFELADAT ARÁNYA 30%.
 Az Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről szóló 133/2011. (VII. 18.) Korm. rendelet alapján. Szakképesítés, szakképesítés-elágazás, rész-szakképesítés,
Az Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről szóló 133/2011. (VII. 18.) Korm. rendelet alapján. Szakképesítés, szakképesítés-elágazás, rész-szakképesítés,
MATEMATIKA ÉRETTSÉGI 2007. október 25. EMELT SZINT I.
 1) x x MATEMATIKA ÉRETTSÉGI 007. október 5. EMELT SZINT I. a) Oldja meg a valós számok halmazán az alábbi egyenletet! (5 pont) b) Oldja meg a valós számpárok halmazán az alábbi egyenletrendszert! lg x
1) x x MATEMATIKA ÉRETTSÉGI 007. október 5. EMELT SZINT I. a) Oldja meg a valós számok halmazán az alábbi egyenletet! (5 pont) b) Oldja meg a valós számpárok halmazán az alábbi egyenletrendszert! lg x
2011. NCT-104T ÍRÁSBELI ORSZÁGOS CNC PROGRAMOZÁS ÉS GÉPKEZELÉS SZAKMAI VERSENY. április 14-16. Versenyző száma:
 ORSZÁGOS CNC PROGRAMOZÁS ÉS GÉPKEZELÉS SZAKMAI VERSENY április 14-16. 2011. NCT-104T ÍRÁSBELI A kidolgozás időtartama 180 perc Jóváhagyta Apostol Attila Támogatók NCT Kft. NCT Akadémia graphit Kft. ISCAR
ORSZÁGOS CNC PROGRAMOZÁS ÉS GÉPKEZELÉS SZAKMAI VERSENY április 14-16. 2011. NCT-104T ÍRÁSBELI A kidolgozás időtartama 180 perc Jóváhagyta Apostol Attila Támogatók NCT Kft. NCT Akadémia graphit Kft. ISCAR
Az alábbiakban az interneten elérhető kompetenciatesztek kitöltéséhez olvashat útmutatót.
 Kedves Jelentkező! Az alábbiakban az interneten elérhető kompetenciatesztek kitöltéséhez olvashat útmutatót. Ha a kitöltés során bármilyen problémát tapasztal, kérjük, írjon e-mailt a következő címre:
Kedves Jelentkező! Az alábbiakban az interneten elérhető kompetenciatesztek kitöltéséhez olvashat útmutatót. Ha a kitöltés során bármilyen problémát tapasztal, kérjük, írjon e-mailt a következő címre:
200S KIJELZ REFERENCIA KÉZIKÖNYV
 200S KIJELZ REFERENCIA KÉZIKÖNYV 200S Billentyûkiosztás Tengelygombok Számbillentyûzet Képernyõ Terület Enter gomb Funkciógo Áramjelzõlámpa Törlés gomb 200S Funkciógombok A funkciógomb funkciók három oldalon
200S KIJELZ REFERENCIA KÉZIKÖNYV 200S Billentyûkiosztás Tengelygombok Számbillentyûzet Képernyõ Terület Enter gomb Funkciógo Áramjelzõlámpa Törlés gomb 200S Funkciógombok A funkciógomb funkciók három oldalon
A FOGLAKOZÁS ADATAI: SZERZŐ. Vindics Dóra. Vezérelj robotot! A FOGLALKOZÁS CÍME A FOGLALKOZÁS RÖVID
 A FOGLAKOZÁS ADATAI: SZERZŐ Vindics Dóra A FOGLALKOZÁS CÍME Vezérelj robotot! A FOGLALKOZÁS RÖVID LEÍRÁSA A tanulók gyakran nem értik, hogy miért van szükség arra, amit matematika órán tanulnak. Ebben
A FOGLAKOZÁS ADATAI: SZERZŐ Vindics Dóra A FOGLALKOZÁS CÍME Vezérelj robotot! A FOGLALKOZÁS RÖVID LEÍRÁSA A tanulók gyakran nem értik, hogy miért van szükség arra, amit matematika órán tanulnak. Ebben
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás
 Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
CDC 2000 Vezérlő 3. Záróegység beállítás Asian Plastic
 3.1 Szerszám zárás és nyitás beállítása Menü 03 A Funkciógombok első nagy csoportja a szerszám- és záróegység beállításokkal foglalkozik. Mozgassa a kurzort a kívánt mezőre, adja meg a kívánt értéket,
3.1 Szerszám zárás és nyitás beállítása Menü 03 A Funkciógombok első nagy csoportja a szerszám- és záróegység beállításokkal foglalkozik. Mozgassa a kurzort a kívánt mezőre, adja meg a kívánt értéket,
Használati utasítás. Görgős fékvizsgáló próbapad
 Használati utasítás Görgős fékvizsgáló próbapad Tartalom 1. Felhasznált szimbólumok 1.1 Dokumentáció 1.2 BSA 44xx 2. Információk a felhasználáshoz 2.1 Fontos megjegyzések 2.2 Biztonsági útmutatás 2.3 Egyéb
Használati utasítás Görgős fékvizsgáló próbapad Tartalom 1. Felhasznált szimbólumok 1.1 Dokumentáció 1.2 BSA 44xx 2. Információk a felhasználáshoz 2.1 Fontos megjegyzések 2.2 Biztonsági útmutatás 2.3 Egyéb
NCT hosszesztergák mûködése
 NCT hosszesztergák mûködése A gép felépítése Csatornák: 2 csatorna. A két csatornát az S1 és S2 tokmányokhoz rendeljük. Elnevezésük: 1. csatorna: CS1 (Chuck S1) 2. csatorna: CS2 (Chuck S2) Tengelyek: 1.
NCT hosszesztergák mûködése A gép felépítése Csatornák: 2 csatorna. A két csatornát az S1 és S2 tokmányokhoz rendeljük. Elnevezésük: 1. csatorna: CS1 (Chuck S1) 2. csatorna: CS2 (Chuck S2) Tengelyek: 1.
hatására hátra lép x egységgel a toll
 Ciklusszervező utasítások minden programozási nyelvben léteznek, így például a LOGO-ban is. LOGO nyelven, (vagy legalábbis LOGO-szerű nyelven) írt programok gyakran szerepelnek az iskola számítástechnikai
Ciklusszervező utasítások minden programozási nyelvben léteznek, így például a LOGO-ban is. LOGO nyelven, (vagy legalábbis LOGO-szerű nyelven) írt programok gyakran szerepelnek az iskola számítástechnikai
JINN FA JSL-32A KEZELÉSI ÚTMUTATÓ
 JINN FA JSL-32A KEZELÉSI ÚTMUTATÓ 1 TARTALOMJEGYZÉK 1. FEJEZET: BEVEZETŐ, BIZTONSÁGI ÓVINTÉZKEDÉSEK... 1.1. FIGYELMEZTETŐ ÁBRÁK, FELIRATOK... 1.2. A FIGYELMEZTETŐ FELIRATOK ELHELYEZKEDÉSE... 1.3. BIZTONSÁGI
JINN FA JSL-32A KEZELÉSI ÚTMUTATÓ 1 TARTALOMJEGYZÉK 1. FEJEZET: BEVEZETŐ, BIZTONSÁGI ÓVINTÉZKEDÉSEK... 1.1. FIGYELMEZTETŐ ÁBRÁK, FELIRATOK... 1.2. A FIGYELMEZTETŐ FELIRATOK ELHELYEZKEDÉSE... 1.3. BIZTONSÁGI
SGS-48 FORGALOMTECHNIKAI SEGÉDLET
 SWARCO TRAFFIC HUNGARIA KFT. Vilati, Signelit együtt. SGS-48 FORGALOMTECHNIKAI SEGÉDLET V 2.0 SWARCO First in Traffic Solution. Tartalomjegyzék 1. Bevezető...1 2. Jelzésképek...1 3. A berendezés működési
SWARCO TRAFFIC HUNGARIA KFT. Vilati, Signelit együtt. SGS-48 FORGALOMTECHNIKAI SEGÉDLET V 2.0 SWARCO First in Traffic Solution. Tartalomjegyzék 1. Bevezető...1 2. Jelzésképek...1 3. A berendezés működési
Fénysugarak visszaverődésének tanulmányozása demonstrációs optikai készlet segítségével
 Fénysugarak visszaverődésének tanulmányozása demonstrációs optikai készlet segítségével Demonstrációs optikai készlet lézer fényforrással Az optikai elemeken mágnesfólia található, így azok fémtáblára
Fénysugarak visszaverődésének tanulmányozása demonstrációs optikai készlet segítségével Demonstrációs optikai készlet lézer fényforrással Az optikai elemeken mágnesfólia található, így azok fémtáblára
Forgácsoló gyártócellák, gyártórendszerek 2.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 2. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák (FMC) 2. Rugalmas gyártórendszerek
A számítógép alapfelépítése
 Informatika alapjai-6 számítógép felépítése 1/8 számítógép alapfelépítése Nevezzük számítógépnek a következő kétféle elrendezést: : Harvard struktúra : Neumann struktúra kétféle elrendezés alapvetően egyformán
Informatika alapjai-6 számítógép felépítése 1/8 számítógép alapfelépítése Nevezzük számítógépnek a következő kétféle elrendezést: : Harvard struktúra : Neumann struktúra kétféle elrendezés alapvetően egyformán
BEACon TM. Verzió 2.0
 BEACon TM Verzió 2.0 A Suprema Inc., a BioEntry TM és a BEACon TM a Suprema Inc. regisztrált márkanevei. Minden jog fenntartva. Ennek a munkának semmilyen részét, ami ezek a márkanevek alatt fut nem lehet
BEACon TM Verzió 2.0 A Suprema Inc., a BioEntry TM és a BEACon TM a Suprema Inc. regisztrált márkanevei. Minden jog fenntartva. Ennek a munkának semmilyen részét, ami ezek a márkanevek alatt fut nem lehet
WOP feladatgyűjtemény - marás. Mathematisch Technische Software-Entwicklung GmbH CNC-TECHNIKA. WOP feladatgyűjtemény - marás.
 Mathematisch Technische Software-Entwicklung GmbH CNC-TECHNIKA WOP feladatgyűjtemény - marás MTS GmbH 2006 1 . WOP feladatgyűjtemény - marás MTS Mathematisch Technische Software-Entwicklung GmbH Kaiserin-Augusta-Allee
Mathematisch Technische Software-Entwicklung GmbH CNC-TECHNIKA WOP feladatgyűjtemény - marás MTS GmbH 2006 1 . WOP feladatgyűjtemény - marás MTS Mathematisch Technische Software-Entwicklung GmbH Kaiserin-Augusta-Allee
52 523 03 0000 00 00 Mechatronikai műszerész Mechatronikai műszerész
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
1. Az utasítás beolvasása a processzorba
 A MIKROPROCESSZOR A mikroprocesszor olyan nagy bonyolultságú félvezető eszköz, amely a digitális számítógép központi egységének a feladatait végzi el. Dekódolja az uatasításokat, vezérli a műveletek elvégzéséhez
A MIKROPROCESSZOR A mikroprocesszor olyan nagy bonyolultságú félvezető eszköz, amely a digitális számítógép központi egységének a feladatait végzi el. Dekódolja az uatasításokat, vezérli a műveletek elvégzéséhez
XXI. Országos Ajtonyi István Irányítástechnikai Programozó Verseny
 evopro systems engineering kft. H-1116 Budapest, Hauszmann A. u. 2. XXI. Országos Ajtonyi István Dokumentum státusza Közétett Dokumentum verziószáma v1.0 Felelős személy Kocsi Tamás / Tarr László Jóváhagyta
evopro systems engineering kft. H-1116 Budapest, Hauszmann A. u. 2. XXI. Országos Ajtonyi István Dokumentum státusza Közétett Dokumentum verziószáma v1.0 Felelős személy Kocsi Tamás / Tarr László Jóváhagyta
Fókusz. SELOGICA vezérlés. A teljes fröccsöntési technológiát átfogó folyamatirányítás. www.arburg.com
 Fókusz SELOGICA vezérlés A teljes fröccsöntési technológiát átfogó folyamatirányítás www.arburg.com Rövid áttekintés 1 2 Központi irányítás: a SELOGICA vezérlőrendszerrel valamennyi ALLROUNDER gép, illetve
Fókusz SELOGICA vezérlés A teljes fröccsöntési technológiát átfogó folyamatirányítás www.arburg.com Rövid áttekintés 1 2 Központi irányítás: a SELOGICA vezérlőrendszerrel valamennyi ALLROUNDER gép, illetve
mynct v0.0.1 Maró verzió Kezelési leírás
 1 / 34 2013.04.29. 13:01 mynct v0.0.1 Maró verzió Kezelési leírás Gyártó és fejlesztő:nct IpariElektronikai kft. H1148 Budapest Fogarasi út7. Levélcím: H1631 Bp. pf.: 26. Telefon: (+36 1) 467 63 00 Telefax:
1 / 34 2013.04.29. 13:01 mynct v0.0.1 Maró verzió Kezelési leírás Gyártó és fejlesztő:nct IpariElektronikai kft. H1148 Budapest Fogarasi út7. Levélcím: H1631 Bp. pf.: 26. Telefon: (+36 1) 467 63 00 Telefax:
VERTESZ Fázisazonosító Felhasználói Leírás
 VERTESZ Felhasználói Leírás felhasználói leírás Tartalomjegyzék 1.ÁLTALÁNOS LEÍRÁS... 3 1.1.A készüléken található jelölések jelentése...3 1.2.Biztonsági figyelmeztetés... 3 1.3.A készülékek rendeltetése...
VERTESZ Felhasználói Leírás felhasználói leírás Tartalomjegyzék 1.ÁLTALÁNOS LEÍRÁS... 3 1.1.A készüléken található jelölések jelentése...3 1.2.Biztonsági figyelmeztetés... 3 1.3.A készülékek rendeltetése...
EPA 320 CNC eszterga Oktatási segédlet
 MISKOLCI EGYETEM SZERSZÁMGÉPEK TANSZÉKE EPA 320 CNC eszterga Oktatási segédlet Összeállította: Dr. Jakab Endre egyetemi docens Dr. Zsiga Zoltán foiskolai docens Miskolc, 2001 1. Általános ismerteto A bemutatandó
MISKOLCI EGYETEM SZERSZÁMGÉPEK TANSZÉKE EPA 320 CNC eszterga Oktatási segédlet Összeállította: Dr. Jakab Endre egyetemi docens Dr. Zsiga Zoltán foiskolai docens Miskolc, 2001 1. Általános ismerteto A bemutatandó
Passzív optikai hálózat csillapításának mérése optikai adó-vevővel Összeállította: Békefi Ádám hallgató Mészáros István tanszéki mérnök
 Passzív optikai hálózat csillapításának mérése optikai adó-vevővel Összeállította: Békefi Ádám hallgató Mészáros István tanszéki mérnök Szálparaméterek Az optikai szálak tulajdonságainak három alaptípusa
Passzív optikai hálózat csillapításának mérése optikai adó-vevővel Összeállította: Békefi Ádám hallgató Mészáros István tanszéki mérnök Szálparaméterek Az optikai szálak tulajdonságainak három alaptípusa
Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése
 Üdvözlök mindenkit! Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése Bóka Jenő Óbudai Egyetem Kandó Kálmán Villamosmérnö Nappali tagozat, Szabályozott
Üdvözlök mindenkit! Szemlencseragasztó berendezés hajtásainak és vezérlőjének kiválasztása, vezérlőprogramjának elkészítése Bóka Jenő Óbudai Egyetem Kandó Kálmán Villamosmérnö Nappali tagozat, Szabályozott
Címtár Felhő Projektfeladat specifikáció
 Címtár Felhő Projektfeladat specifikáció 1 Tartalomjegyzék 1 Tartalomjegyzék... 2 2 Bevezetés... 3 2.1 A feladat címe... 3 2.2 A feladat rövid ismertetése... 3 3 Elvárások a feladattal kapcsolatban...
Címtár Felhő Projektfeladat specifikáció 1 Tartalomjegyzék 1 Tartalomjegyzék... 2 2 Bevezetés... 3 2.1 A feladat címe... 3 2.2 A feladat rövid ismertetése... 3 3 Elvárások a feladattal kapcsolatban...
Az MS Access adatbázis-kezelő program
 Az adatbázis-kezelő program A tananyagban az alapfogalmak és a tervezési megoldások megismerése után a gyakorlatban is elkészítünk (számítógépes) adatbázisokat. A számítógépes adatbázisok létrehozásához,
Az adatbázis-kezelő program A tananyagban az alapfogalmak és a tervezési megoldások megismerése után a gyakorlatban is elkészítünk (számítógépes) adatbázisokat. A számítógépes adatbázisok létrehozásához,
FIÓKOM MENÜPONT RÉSZEI
 A BarterPartner.hu rendszerének használata Ennek a használati útmutatónak a segítségével lépésről lépésre végigkísérjük a BarterPartner.hu rendszer használatának minden egyes lépésén, a részletes leírásokat
A BarterPartner.hu rendszerének használata Ennek a használati útmutatónak a segítségével lépésről lépésre végigkísérjük a BarterPartner.hu rendszer használatának minden egyes lépésén, a részletes leírásokat
Készítette: niethammer@freemail.hu
 VLogo VRML generáló program Készítette: Niethammer Zoltán niethammer@freemail.hu 2008 Bevezetés A VLogo az általános iskolákban használt Comenius Logo logikájára épülő programozási nyelv. A végeredmény
VLogo VRML generáló program Készítette: Niethammer Zoltán niethammer@freemail.hu 2008 Bevezetés A VLogo az általános iskolákban használt Comenius Logo logikájára épülő programozási nyelv. A végeredmény
TANTÁRGY KÖVETELMÉNYEK 2013/2014 2.FÉLÉV
 TANTÁRGY KÖVETELMÉNYEK 2013/2014 2.FÉLÉV TARTALOMJEGYZÉK TARTALOMJEGYZÉK...1 NAPPALI TAGOZAT...3 Villamosmérnök...3 KAUCA11ONC CAD 3D...3 KAUAE11ONC Alternatív energiaforrások...3 KAUAU21ONC Automatika
TANTÁRGY KÖVETELMÉNYEK 2013/2014 2.FÉLÉV TARTALOMJEGYZÉK TARTALOMJEGYZÉK...1 NAPPALI TAGOZAT...3 Villamosmérnök...3 KAUCA11ONC CAD 3D...3 KAUAE11ONC Alternatív energiaforrások...3 KAUAU21ONC Automatika
ZFV ALAKFELISMERŐ RENDSZER
 ZFV ALAKFELISMERŐ RENDSZER k ö n n y e n k e z e l h e t ő a l a k f e l i s m e r é s - e g y s z e r ű b e t a n í t á s s a l» T ö b b f u n kc i ó» R u g a l m a s é s s k á l á z h a t ó» Eg yszerű
ZFV ALAKFELISMERŐ RENDSZER k ö n n y e n k e z e l h e t ő a l a k f e l i s m e r é s - e g y s z e r ű b e t a n í t á s s a l» T ö b b f u n kc i ó» R u g a l m a s é s s k á l á z h a t ó» Eg yszerű
MARK08 GSM riasztó Felhasználói leírás
 MARK08 GSM riasztó Felhasználói leírás MA-RK LED kezelő SW. ver.:1.64 2014-04-15 2 MARK08 GSM Riasztó Felhasználói leírás MARK08 GSM Riasztó Felhasználói leírás 3 Tartalomjegyzék GSM riasztó rövid bemutatása...5
MARK08 GSM riasztó Felhasználói leírás MA-RK LED kezelő SW. ver.:1.64 2014-04-15 2 MARK08 GSM Riasztó Felhasználói leírás MARK08 GSM Riasztó Felhasználói leírás 3 Tartalomjegyzék GSM riasztó rövid bemutatása...5
A mikroszámítógép felépítése.
 1. Processzoros rendszerek fő elemei mikroszámítógépek alapja a mikroprocesszor. Elemei a mikroprocesszor, memória, és input/output eszközök. komponenseket valamilyen buszrendszer köti össze, amelyen az
1. Processzoros rendszerek fő elemei mikroszámítógépek alapja a mikroprocesszor. Elemei a mikroprocesszor, memória, és input/output eszközök. komponenseket valamilyen buszrendszer köti össze, amelyen az
Gyártórendszerek fejlődésének fázisai
 Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
A PROGAMOZÁS ALAPJAI 1. Függvény mint függvény paramétere. Függvény mint függvény paramétere. Függvény mint függvény paramétere
 2012. április 10. A PROGAMOZÁS ALAPJAI 1 Vitéz András egyetemi adjunktus BME Híradástechnikai Tanszék vitez@hit.bme.hu Miről lesz ma szó? alaki szabályok használata - mintapélda használata - mintapélda
2012. április 10. A PROGAMOZÁS ALAPJAI 1 Vitéz András egyetemi adjunktus BME Híradástechnikai Tanszék vitez@hit.bme.hu Miről lesz ma szó? alaki szabályok használata - mintapélda használata - mintapélda
A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI MÉRNÖK KÉPZÉSBEN
 IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
IV. Évfolyam 1. szám - 2009. március Tibenszkyné Fórika Krisztina Zrínyi Miklós Nemzetvédelmi Egyetem tibenszkyne.forika.krisztina@zmne.hu A ROBOTIKA ALKALMAZÁSÁNAK LEHETŐSÉGEI A HAD- ÉS BIZTONSÁGTECHNIKAI
Hegyes fogó vagy lapos fogó. Állítson össze egy tengelyt
 SOCCER ROBOT AREXX - DIE NIEDERLANDE 2006 ÉPÍTÉSI ÚTMUTATÓ: Modell SR-129 Rend. sz.: 19 16 36 - Ne állítsa össze kis gyerekek jelenlétében. A gyerekek a szerszámoktól megsérülhetnek vagy az apró alkatrészeket
SOCCER ROBOT AREXX - DIE NIEDERLANDE 2006 ÉPÍTÉSI ÚTMUTATÓ: Modell SR-129 Rend. sz.: 19 16 36 - Ne állítsa össze kis gyerekek jelenlétében. A gyerekek a szerszámoktól megsérülhetnek vagy az apró alkatrészeket
Korszerű szerszámgépek
 SZÉCHENYI ISTVÁN EGYETEM GYŐR SZERSZÁMGÉPEK (NGB_AJ009_2) Korszerű szerszámgépek Összeállította: Dr. Pintér József 2011.09.26. Korszerű szerszámgépek 1 Korszerű szerszámgépek VÁZLAT 1. Kinematikai alapok,
SZÉCHENYI ISTVÁN EGYETEM GYŐR SZERSZÁMGÉPEK (NGB_AJ009_2) Korszerű szerszámgépek Összeállította: Dr. Pintér József 2011.09.26. Korszerű szerszámgépek 1 Korszerű szerszámgépek VÁZLAT 1. Kinematikai alapok,
www.tmarkt.hu CUSTOM COMMAND IPARI ÖNTÖZÉSVEZÉRLŐ AUTOMATIKA HASZNÁLATI UTASÍTÁS
 CUSTOM COMMAND IPARI ÖNTÖZÉSVEZÉRLŐ AUTOMATIKA HASZNÁLATI UTASÍTÁS TULAJDONSÁGOK Négy teljesen független program, melyek egyszerre is futhatnak. A hét napjai szerinti, páros-páratlan napok szerinti vagy
CUSTOM COMMAND IPARI ÖNTÖZÉSVEZÉRLŐ AUTOMATIKA HASZNÁLATI UTASÍTÁS TULAJDONSÁGOK Négy teljesen független program, melyek egyszerre is futhatnak. A hét napjai szerinti, páros-páratlan napok szerinti vagy
TRIMx-EP DIGITÁLIS SZINKRON KAPCSOLÁS TRANSZFORMÁTOROK. Alkalmazási terület
 TRIMx-EP DIGITÁLIS SZINKRON KAPCSOLÁS VEZÉRLŐ KÉSZÜLÉK TRANSZFORMÁTOROK BEKAPCSOLÁSI ÁRAMLÖKÉSÉNEK CSÖKKENTÉSÉRE Alkalmazási terület A TRIMx-EP készülék feladata a transzformátorok bekapcsolási áramlökésének
TRIMx-EP DIGITÁLIS SZINKRON KAPCSOLÁS VEZÉRLŐ KÉSZÜLÉK TRANSZFORMÁTOROK BEKAPCSOLÁSI ÁRAMLÖKÉSÉNEK CSÖKKENTÉSÉRE Alkalmazási terület A TRIMx-EP készülék feladata a transzformátorok bekapcsolási áramlökésének
Robottechnika projektfeladat
 Robottechnika projektfeladat Kovács Dániel (G6HEBK) Pethő Ádám (GMQYM2) A feladat leírása 2x2x2-es Rubik kocka megkeverése több lépésben. Célkitűzések A Rubik kockát lehessen forgatni Mindhárom tengelye
Robottechnika projektfeladat Kovács Dániel (G6HEBK) Pethő Ádám (GMQYM2) A feladat leírása 2x2x2-es Rubik kocka megkeverése több lépésben. Célkitűzések A Rubik kockát lehessen forgatni Mindhárom tengelye
Kiegészítés az üzemeltetési utasításhoz
 Hajtástechnika \ Hajtásautomatizálás \ Rendszerintegráció \ Szolgáltatások Kiegészítés az üzemeltetési utasításhoz MOVITRAC LTX Szervomodul a MOVITRAC LTP-B készülékhez Kiadás: 2012. 05. 19458177 / HU
Hajtástechnika \ Hajtásautomatizálás \ Rendszerintegráció \ Szolgáltatások Kiegészítés az üzemeltetési utasításhoz MOVITRAC LTX Szervomodul a MOVITRAC LTP-B készülékhez Kiadás: 2012. 05. 19458177 / HU
HIBAMENTES MUNKAVÉGZÉS - FÁRADSÁG NÉLKÜL
 HIBAMENTES MUNKAVÉGZÉS - FÁRADSÁG NÉLKÜL Elengedhetetlen hogy ne fáradjon el az dolgozó a precíziós nyomatékszerelés során. Ezen szereléseket támogatja a csavarozási pont helyzetét felismerő és vezérlő
HIBAMENTES MUNKAVÉGZÉS - FÁRADSÁG NÉLKÜL Elengedhetetlen hogy ne fáradjon el az dolgozó a precíziós nyomatékszerelés során. Ezen szereléseket támogatja a csavarozási pont helyzetét felismerő és vezérlő
Beavatkozószervek 2006.05.10.
 Beavatkozószervek 2006.05.10. 1 Beavatkozószervek beavatkozószervek feladatuk: az irányítórendszertől (szabályzó egységtől) érkező parancsok végrehajtása, a beavatkozás megvalósítása a technológiai folyamaton
Beavatkozószervek 2006.05.10. 1 Beavatkozószervek beavatkozószervek feladatuk: az irányítórendszertől (szabályzó egységtől) érkező parancsok végrehajtása, a beavatkozás megvalósítása a technológiai folyamaton
Általános beállítások
 Felhasználói kézikönyv Általános beállítások 1 2 3 4 5 6 7 Kezdeti lépések Műveletek kombinált funkciókkal Felhasználói eszközök (Rendszerbeállítások) Hibaelhárítás Egyéb funkciók Biztonság Műszaki adatok
Felhasználói kézikönyv Általános beállítások 1 2 3 4 5 6 7 Kezdeti lépések Műveletek kombinált funkciókkal Felhasználói eszközök (Rendszerbeállítások) Hibaelhárítás Egyéb funkciók Biztonság Műszaki adatok
VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. ELŐADÁSI ANYAG TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. - 1 -
 - 1 - VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. ELŐADÁSI ANYAG *2.A gyártmány és technológia sajátosságai. A gyártandó alkatrész geometriai
- 1 - VIZSGAKÉRDÉSEK GÉPGYÁRTÁSTECHNOLÓGIÁBÓL AZ I. ÉVF. TERMÉKTERVEZŐ ÉS A II.ÉVF. GÉPÉSZMÉRNÖK HALLGATÓK SZÁMÁRA. ELŐADÁSI ANYAG *2.A gyártmány és technológia sajátosságai. A gyártandó alkatrész geometriai
CDC 2000 Vezérlő 6.Alap-,és speciális funkció beállítások
 6.1 Funkció választás Menü 32 Ebben a menüben a gép egyes főbb opcióit tudjuk be- ill. kikapcsolni. Fotocella funkció: A kész darabok kiesésének figyelését kapcsolhatjuk be ill. ki. Arra azonban figyelnünk
6.1 Funkció választás Menü 32 Ebben a menüben a gép egyes főbb opcióit tudjuk be- ill. kikapcsolni. Fotocella funkció: A kész darabok kiesésének figyelését kapcsolhatjuk be ill. ki. Arra azonban figyelnünk
Használati útmutató. DALI EASY 1.0 változat. www.osram.com www.osram.de
 Használati útmutató DALI EASY 1.0 változat OSRAM GmbH Customer-Service-Center (CSC) Steinerne Furt 62 86167 Augsburg, Germany www.osram.com www.osram.de Tel. : (+49) 1803 / 677-200 (díjköteles) Fax.: (+49)
Használati útmutató DALI EASY 1.0 változat OSRAM GmbH Customer-Service-Center (CSC) Steinerne Furt 62 86167 Augsburg, Germany www.osram.com www.osram.de Tel. : (+49) 1803 / 677-200 (díjköteles) Fax.: (+49)
Rapidturn: Két kézikerekes eszterga
 Rapidturn: Két kézikerekes eszterga A CNC esztergák nagyobb pontosságuk, tudásuk ellenére napjainkig még nem tudták kiszorítani az üzemekből a hagyományos esztergapadokat, ez utóbbiak egyszerű kezelhetősége
Rapidturn: Két kézikerekes eszterga A CNC esztergák nagyobb pontosságuk, tudásuk ellenére napjainkig még nem tudták kiszorítani az üzemekből a hagyományos esztergapadokat, ez utóbbiak egyszerű kezelhetősége
NE1A sorozatú munkabiztonsági hálózati vezérlő: NE1A-SCPU01(-V1)/-SCPU02
/-SCPU02") Cat. No. Z906-HU2-03 NE1A sorozatú munkabiztonsági hálózati vezérlő: NE1A-SCPU01(-V1)/-SCPU02 HASZNÁLATI ÚTMUTATÓ Rövid áttekintés 17 Műszaki adatok és elnevezések 31 Telepítés és bekötés 51 DeviceNet
Cat. No. Z906-HU2-03 NE1A sorozatú munkabiztonsági hálózati vezérlő: NE1A-SCPU01(-V1)/-SCPU02 HASZNÁLATI ÚTMUTATÓ Rövid áttekintés 17 Műszaki adatok és elnevezések 31 Telepítés és bekötés 51 DeviceNet
HITELESÍTÉSI ELŐÍRÁS HE 24-2012
 HITELESÍTÉSI ELŐÍRÁS GÉPJÁRMŰ-GUMIABRONCSNYOMÁS MÉRŐK HE 24-2012 TARTALOMJEGYZÉK 1. AZ ELŐÍRÁS HATÁLYA... 5 2. MÉRTÉKEGYSÉGEK, JELÖLÉSEK... 6 2.1 Használt mennyiségek... 6 2.2 Jellemző mennyiségi értékek
HITELESÍTÉSI ELŐÍRÁS GÉPJÁRMŰ-GUMIABRONCSNYOMÁS MÉRŐK HE 24-2012 TARTALOMJEGYZÉK 1. AZ ELŐÍRÁS HATÁLYA... 5 2. MÉRTÉKEGYSÉGEK, JELÖLÉSEK... 6 2.1 Használt mennyiségek... 6 2.2 Jellemző mennyiségi értékek
Máté: Számítógép architektúrák
 Elágazás jövendölés ok gép megjövendöli, hogy egy ugrást végre kell hajtani vagy sem. Egy triviális jóslás: a visszafelé irányulót végre kell hajtani (ilyen van a ciklusok végén), az előre irányulót nem
Elágazás jövendölés ok gép megjövendöli, hogy egy ugrást végre kell hajtani vagy sem. Egy triviális jóslás: a visszafelé irányulót végre kell hajtani (ilyen van a ciklusok végén), az előre irányulót nem
GÉPÉSZETI ÉS AUTOMATIZÁLÁSI MÉRÉSEK
 GÉPÉSZETI ÉS AUTOMATIZÁLÁSI MÉRÉSEK Környezetvédelmi technikus tanulók részére Ez a tankönyvpótló jegyzet a Petrik Lajos Két Tanítási Nyelvű Vegyipari, Környezetvédelmi és Informatikai Szakközépiskola
GÉPÉSZETI ÉS AUTOMATIZÁLÁSI MÉRÉSEK Környezetvédelmi technikus tanulók részére Ez a tankönyvpótló jegyzet a Petrik Lajos Két Tanítási Nyelvű Vegyipari, Környezetvédelmi és Informatikai Szakközépiskola
Szupermikroprocesszorok és alkalmazásaik
 Szupermikroprocesszorok és alkalmazásaik VAJDA FERENC MTA Központi Fizikai Kutató Intézet Mérés- és Számítástechnikai Kutató Intézet 1. Bevezetés ÖSSZEFOGLALÁS Egy rétegezett modell alapján mutatjuk be
Szupermikroprocesszorok és alkalmazásaik VAJDA FERENC MTA Központi Fizikai Kutató Intézet Mérés- és Számítástechnikai Kutató Intézet 1. Bevezetés ÖSSZEFOGLALÁS Egy rétegezett modell alapján mutatjuk be
Használati útmutató Magyar. Szimbólumok A Biztonsági előírásoknál használt szimbólumok a következőket jelentik:
 Használati útmutató Magyar Szimbólumok A Biztonsági előírásoknál használt szimbólumok a következőket jelentik: Gratulálunk a Makita LD100P megvásárlásához! A termék használata előtt figyelmesen olvassa
Használati útmutató Magyar Szimbólumok A Biztonsági előírásoknál használt szimbólumok a következőket jelentik: Gratulálunk a Makita LD100P megvásárlásához! A termék használata előtt figyelmesen olvassa
 ö Á ö É É ü ü É É Ő ö É ö Á ó ü É Ó Ö Á ú é ü ö é Ö é ü é é ü ü é é Ü é ö ö Ö ö é Á é é é é é ó é é é é ü é ö ö ö í é ü ú é é é ü ü é é é ü é é ö é ö é é ó ö ü é é é é ó ó ö í ó é ó é é é ó é é é ű ö é
ö Á ö É É ü ü É É Ő ö É ö Á ó ü É Ó Ö Á ú é ü ö é Ö é ü é é ü ü é é Ü é ö ö Ö ö é Á é é é é é ó é é é é ü é ö ö ö í é ü ú é é é ü ü é é é ü é é ö é ö é é ó ö ü é é é é ó ó ö í ó é ó é é é ó é é é ű ö é
 Á Á É Á Ü ö ű ű ő í ő ö ő í ő ö í É ő í ű ö ő ő í ö ü ő ő ü ő ü í ö ö ü ö ü ő ő ü ü ő ü ö ő ő ő ő íő ö ö ö ü ő ő ő ő í ú ő ő í ü ö ő í ű ü ö ő ő ő ő í ú ö ö ő ö ö ö ö ü ő ő ö ő ő í í ő ö ü ö í ö ö ö ö
Á Á É Á Ü ö ű ű ő í ő ö ő í ő ö í É ő í ű ö ő ő í ö ü ő ő ü ő ü í ö ö ü ö ü ő ő ü ü ő ü ö ő ő ő ő íő ö ö ö ü ő ő ő ő í ú ő ő í ü ö ő í ű ü ö ő ő ő ő í ú ö ö ő ö ö ö ö ü ő ő ö ő ő í í ő ö ü ö í ö ö ö ö
 ó Í ó ó Ü ó ő Ú ő É ó É Í ő Ö ő ő ó Íó ó Ú ó É Ö ó ő ő Ú Íő ő ő ő ő ő Ú ő ó ó ő ő ő ő ó ő ő ő ő ő ő Í ő ő ó ő ő ó ő Í ő ó ő ő ő ő ő ó ó ó ő ő ó ő ő ő ő ő ő ó ő ő ő ó ő ő Á ű ő ő ő ő ő ő Í ó ő ő ő ő ó ó
ó Í ó ó Ü ó ő Ú ő É ó É Í ő Ö ő ő ó Íó ó Ú ó É Ö ó ő ő Ú Íő ő ő ő ő ő Ú ő ó ó ő ő ő ő ó ő ő ő ő ő ő Í ő ő ó ő ő ó ő Í ő ó ő ő ő ő ő ó ó ó ő ő ó ő ő ő ő ő ő ó ő ő ő ó ő ő Á ű ő ő ő ő ő ő Í ó ő ő ő ő ó ó
 Á Á Í ó ó ó ö ó Ü ö ú Í ó ö ö ó ú ö ó ö ö Ü ö ú ó ó ó ó ö ü ó ö ö ü Ü ö ö ú ó ó ö ú ö ó ó ó ó ö ó ö ó ö ó ö ű ö ö ö ű ö ö ű ö ö ö ű ö ö ó ö ö ó ó ü ö ö ű ö ö ö ó ö ű ö Ü ö ö ú ó ö ó ü ü ö ü ü ö Í ö ü ö
Á Á Í ó ó ó ö ó Ü ö ú Í ó ö ö ó ú ö ó ö ö Ü ö ú ó ó ó ó ö ü ó ö ö ü Ü ö ö ú ó ó ö ú ö ó ó ó ó ö ó ö ó ö ó ö ű ö ö ö ű ö ö ű ö ö ö ű ö ö ó ö ö ó ó ü ö ö ű ö ö ö ó ö ű ö Ü ö ö ú ó ö ó ü ü ö ü ü ö Í ö ü ö
 ó ő ó ó ö ö ú Á Í ö ó ő ö ú Í ó ü ó ő ö ú ö ó ő ó ő ü ő ű ö ö ü ő ü ó Ó ö ó ó ő ő ő ö Í ó ö ö ö ó ő ö ő Í ü ö ö ö ö ö ö ő ö ö ö ö ú ú ű ö ű ó ó ö ö ő ű ö ú ö ö ö ö ö ó Á ö ö ö ő ő ó ő ő Ö ő ú ó ö ú ú ű
ó ő ó ó ö ö ú Á Í ö ó ő ö ú Í ó ü ó ő ö ú ö ó ő ó ő ü ő ű ö ö ü ő ü ó Ó ö ó ó ő ő ő ö Í ó ö ö ö ó ő ö ő Í ü ö ö ö ö ö ö ő ö ö ö ö ú ú ű ö ű ó ó ö ö ő ű ö ú ö ö ö ö ö ó Á ö ö ö ő ő ó ő ő Ö ő ú ó ö ú ú ű
 É ő ő íí í ú í ő Ő ő ü ü ü ü ü Ü Ü ő ő ő ő í ő ő ő í íí í ő ű í Ó Ó Ó í Ö Ö í Á Ö Ü Ö É í Ö í ő Ö Ö Ö Á í Á ő ő ő ő É Í Í ő ú Ú ú Ö í ő Á Ö ő Í Í ő ű í ő ú ü íí í Ö ő ő ő ő Í ő ő ő ő í ő ő ő ő í É É í
É ő ő íí í ú í ő Ő ő ü ü ü ü ü Ü Ü ő ő ő ő í ő ő ő í íí í ő ű í Ó Ó Ó í Ö Ö í Á Ö Ü Ö É í Ö í ő Ö Ö Ö Á í Á ő ő ő ő É Í Í ő ú Ú ú Ö í ő Á Ö ő Í Í ő ű í ő ú ü íí í Ö ő ő ő ő Í ő ő ő ő í ő ő ő ő í É É í
 í ö ő í ú ö ö í íí ü Ú Í Á ú ü í ö í ő í ö ő ű Í í ö ü ü ő ő ú í ő í ő ü ü ő Í ő Í í ü ö ö ö ö í ű ő ö ö ö í ü í Ó ö í ő ő í í ő Ó Ú Ő Íő Ő Ó ő ö ő ü ű í í ü ú Ő Í ő ő ő í ü ő É í Ő í ü ü ö ő í ü ö ö ü
í ö ő í ú ö ö í íí ü Ú Í Á ú ü í ö í ő í ö ő ű Í í ö ü ü ő ő ú í ő í ő ü ü ő Í ő Í í ü ö ö ö ö í ű ő ö ö ö í ü í Ó ö í ő ő í í ő Ó Ú Ő Íő Ő Ó ő ö ő ü ű í í ü ú Ő Í ő ő ő í ü ő É í Ő í ü ü ö ő í ü ö ö ü
 Í ö Í ű ú ö ö ú ö É í í ö Ó ű í ö ö í ö ö ö í í ö í í ö ö í ö ö ö ű í ö ö ö ö ö ö ö ú ö í ö ö í ö ö ö ö ö ú ű ű ú ö ö í ö É í ö ö í ö ö ö ú ű ö ö í ö ú ű ö ö í í ú ö ö í ö í í ö ö ö ú ö ö ö ö Í ö ú ö ú
Í ö Í ű ú ö ö ú ö É í í ö Ó ű í ö ö í ö ö ö í í ö í í ö ö í ö ö ö ű í ö ö ö ö ö ö ö ú ö í ö ö í ö ö ö ö ö ú ű ű ú ö ö í ö É í ö ö í ö ö ö ú ű ö ö í ö ú ű ö ö í í ú ö ö í ö í í ö ö ö ú ö ö ö ö Í ö ú ö ú
 ű í ö ö Á ü ü ö ö ö í í É ú ú ö ö ű í ö ü ö ú ü ű ú ö í í ú ö ú í ö ü í í ö í Á Ó É í ű ö ü ö ü ú ü ö ü ú ű ö ü ű ü í ü ű ü ü ö ű í ü í ö ü í í í í ö í ö ö ö Á ű ú ű ö ö ű í ö ö í ú í í ű í ö ú ö ö í Á
ű í ö ö Á ü ü ö ö ö í í É ú ú ö ö ű í ö ü ö ú ü ű ú ö í í ú ö ú í ö ü í í ö í Á Ó É í ű ö ü ö ü ú ü ö ü ú ű ö ü ű ü í ü ű ü ü ö ű í ü í ö ü í í í í ö í ö ö ö Á ű ú ű ö ö ű í ö ö í ú í í ű í ö ú ö ö í Á
 ö ú í í í ő ű Ü Ű Í í Ő Á Á Ö Ő Ű Í ö ú í í í ú ő ö ű í í í ö Ó ő í í í ö ú í ö ö ö ö Ü ő ö ö ö ú ű ő ú ű ö ö ú ö ö ő Ü ö ö í í ő ö í í í í í í ö ö í ö ö í í ő í ő ö ő í ú í ö í ö í í ö ű ö ö Ó Ü ö ő ő
ö ú í í í ő ű Ü Ű Í í Ő Á Á Ö Ő Ű Í ö ú í í í ú ő ö ű í í í ö Ó ő í í í ö ú í ö ö ö ö Ü ő ö ö ö ú ű ő ú ű ö ö ú ö ö ő Ü ö ö í í ő ö í í í í í í ö ö í ö ö í í ő í ő ö ő í ú í ö í ö í í ö ű ö ö Ó Ü ö ő ő
 Ő Ö Ü Ö Ö ő ü ó í ü ü ő ü ó Ö ó ő ó ó ő ó ő í ő í ü ő ö ö ö ü í ü ö ö ö ö Ö ő ő Ö ő í ó ő ó ő Ö í ő ő ő ő ü ő ő ö ó ű ö ó ö ú ő ő ó ü ö í ü ö ö ó í ú ő ó ő í ö ö ö í ő ö ő ő ó ü ö ú ü ő ó ó ő ó ő ó í í
Ő Ö Ü Ö Ö ő ü ó í ü ü ő ü ó Ö ó ő ó ó ő ó ő í ő í ü ő ö ö ö ü í ü ö ö ö ö Ö ő ő Ö ő í ó ő ó ő Ö í ő ő ő ő ü ő ő ö ó ű ö ó ö ú ő ő ó ü ö í ü ö ö ó í ú ő ó ő í ö ö ö í ő ö ő ő ó ü ö ú ü ő ó ó ő ó ő ó í í
 É É É Ó Ö É í Ö ő ü ó ő ó ű Á ű ó ő ó ü ó ő ű ő Ö ü É É É ó É ó ü ű í Ö ü ó ű í ó ő ó ő ü ó ü ő ó É Í ő ő ő Ú ó ő ő ő ó ű ó ő ó ü ő ő ő í ü ő ü ő ó Ü ő ó ő ő ó ő Ú ő ő ó ő í ó ő ü ó Í ő ő ü ő É í ő ü ó
É É É Ó Ö É í Ö ő ü ó ő ó ű Á ű ó ő ó ü ó ő ű ő Ö ü É É É ó É ó ü ű í Ö ü ó ű í ó ő ó ő ü ó ü ő ó É Í ő ő ő Ú ó ő ő ő ó ű ó ő ó ü ő ő ő í ü ő ü ő ó Ü ő ó ő ő ó ő Ú ő ő ó ő í ó ő ü ó Í ő ő ü ő É í ő ü ó
 ú Ö ü ő ő ú ú ű ő í ó ó í ó ú ő ü ú ű ő í ó ó í ó ű í ó ő Í ő ü ú ő ő í ó ú Ö ő Ü ó ő ő É ó ó ó ó ő ő ú ű ő í ó ú ű ő ú ú ő ű ő í ő ó í ű ő ü ú ó ő ő ó ű ő ő í í í í ó ű ú ő Á ó ő Á ú ó ó ő ó í ó ű í í
ú Ö ü ő ő ú ú ű ő í ó ó í ó ú ő ü ú ű ő í ó ó í ó ű í ó ő Í ő ü ú ő ő í ó ú Ö ő Ü ó ő ő É ó ó ó ó ő ő ú ű ő í ó ú ű ő ú ú ő ű ő í ő ó í ű ő ü ú ó ő ő ó ű ő ő í í í í ó ű ú ő Á ó ő Á ú ó ó ő ó í ó ű í í
 ú ő ó ú ö ő ü ú ö ő ó ó ó ü ő í ö í ó ú ő ó ó ó ú ó ú ó ő ő ö ö ő ó ú ó ő ó ő í Á Á ö ö ó ő ú ö ő ú ó í ő ü ü ü í ú ü ü ü ó ú í ü í ó ő ó ő í ú ü ú ó ü ü ö ó ü ó í ü ó ő ö ö í ü ú ó ő ó í ó ő ó í ó ó í
ú ő ó ú ö ő ü ú ö ő ó ó ó ü ő í ö í ó ú ő ó ó ó ú ó ú ó ő ő ö ö ő ó ú ó ő ó ő í Á Á ö ö ó ő ú ö ő ú ó í ő ü ü ü í ú ü ü ü ó ú í ü í ó ő ó ő í ú ü ú ó ü ü ö ó ü ó í ü ó ő ö ö í ü ú ó ő ó í ó ő ó í ó ó í
 Á ó ü ő Ö Á ü ó ü ő Í ü Í Ó ü ő ő ó ó ó Í ó ü ó ő ő ó ó ü ú Í ő ő ó Ó ő ó ü ó Á ü ó ő ó Í Á Í ő ó ó ó ő ő Á ó ó ú ő Í ő ű ó Ó ü ó ó ú ó ő ú ü ő ó ó ó ő ó ó Ö ó ó ő ó ő ó ő ü ű ő ó ó ő ú ő ú ü Í ü ő ó ó
Á ó ü ő Ö Á ü ó ü ő Í ü Í Ó ü ő ő ó ó ó Í ó ü ó ő ő ó ó ü ú Í ő ő ó Ó ő ó ü ó Á ü ó ő ó Í Á Í ő ó ó ó ő ő Á ó ó ú ő Í ő ű ó Ó ü ó ó ú ó ő ú ü ő ó ó ó ő ó ó Ö ó ó ő ó ő ó ő ü ű ő ó ó ő ú ő ú ü Í ü ő ó ó
 ü ö Ö ü ó ü ó ó ó Á Ő É ö Ö ü ó ü ú ó ó ó ö ó í í ö ú Ó É ö Ö ü ó ü ü ó ó ó ö ó í ü ö Ö ó ü ü ü ó ó ó ö ó ü í í í ó í ú ű ű ü ű ú í ü ö ö í ö ú ü ó ú ú ű í ü ö ö ó ú ó í ü ú ó ü ó ó ű ó í ü ű ü í ű í
ü ö Ö ü ó ü ó ó ó Á Ő É ö Ö ü ó ü ú ó ó ó ö ó í í ö ú Ó É ö Ö ü ó ü ü ó ó ó ö ó í ü ö Ö ó ü ü ü ó ó ó ö ó ü í í í ó í ú ű ű ü ű ú í ü ö ö í ö ú ü ó ú ú ű í ü ö ö ó ú ó í ü ú ó ü ó ó ű ó í ü ű ü í ű í
 ü ó Ö ü í ü ü ü ö É ó ó í ó ó ö ó ö ö ö í í ű ü ü ü Í í ü ü ü ö í ó í ó ó í ó í É ü ö í Í É í ö ú í ó í ö ö ó í ö ó ó ó ö ó ö í í ó ó í ó ó Ö í ö ö ó ö ó ú ó ö ó í ó ó í í ü ó í ö ó ó ü ü ó ö ó ú í ó í
ü ó Ö ü í ü ü ü ö É ó ó í ó ó ö ó ö ö ö í í ű ü ü ü Í í ü ü ü ö í ó í ó ó í ó í É ü ö í Í É í ö ú í ó í ö ö ó í ö ó ó ó ö ó ö í í ó ó í ó ó Ö í ö ö ó ö ó ú ó ö ó í ó ó í í ü ó í ö ó ó ü ü ó ö ó ú í ó í
 ü Ü ö ö ú Í ó í í ó ó ó ü ó ű ó í ó ó í ö ó ö ú ü ö Í í í ó ó ó ó Í ó ü ű ó í ó ó í ó Í í ó ü ö ú ó ó ó í í ó í í ű í ü ö í ó í ö í ú ó í ú ü ú Í í ü Í í í ó ü ö í ó í ó ü ö ó Í í í ó Í É ó ó ó Í í ö ö
ü Ü ö ö ú Í ó í í ó ó ó ü ó ű ó í ó ó í ö ó ö ú ü ö Í í í ó ó ó ó Í ó ü ű ó í ó ó í ó Í í ó ü ö ú ó ó ó í í ó í í ű í ü ö í ó í ö í ú ó í ú ü ú Í í ü Í í í ó ü ö í ó í ó ü ö ó Í í í ó Í É ó ó ó Í í ö ö
 Á Ó Á Ü ő ű Ú ö í ő Ó ú ö Á ú Ű Ó ű Ó í ű ö í ö ő ö ö í ö ö ő É ö Á ű Ó ö Á Ó ö í Á í í ö ű ö ú ö ö ú ö Ú ö ű Ó Ú ö Á í Ó í í Í í í Í ö Ú ö Á ú í Ó ő í ú ö Á ú Á í ú ö Á ú í ö Á ú í Ó ö ű Ó Ú Ú ű ő ö ü
Á Ó Á Ü ő ű Ú ö í ő Ó ú ö Á ú Ű Ó ű Ó í ű ö í ö ő ö ö í ö ö ő É ö Á ű Ó ö Á Ó ö í Á í í ö ű ö ú ö ö ú ö Ú ö ű Ó Ú ö Á í Ó í í Í í í Í ö Ú ö Á ú í Ó ő í ú ö Á ú Á í ú ö Á ú í ö Á ú í Ó ö ű Ó Ú Ú ű ő ö ü
 ö Ö ö Ö ö ö ö ö ö ö ö Ö ö Ö ö ö ö ö ö ű ö ö ö ö Ö ö Ő Ü ö ö Ö Ö ö ö ö ö ö ö ö ö Ü ö ö ö ű ö ö ö ö ű ö ű ö Ö Ü Ü ö ö ú Ű ÍŐ Ö Ő ÍŐ ö ö ö ö ű ö Ö Ö Ó ö ö Ö ö ö Ö ö ö Ö ö ű ö ö É ö ö Í Á Á Ő ű ö ű ú Ö Ü Á
ö Ö ö Ö ö ö ö ö ö ö ö Ö ö Ö ö ö ö ö ö ű ö ö ö ö Ö ö Ő Ü ö ö Ö Ö ö ö ö ö ö ö ö ö Ü ö ö ö ű ö ö ö ö ű ö ű ö Ö Ü Ü ö ö ú Ű ÍŐ Ö Ő ÍŐ ö ö ö ö ű ö Ö Ö Ó ö ö Ö ö ö Ö ö ö Ö ö ű ö ö É ö ö Í Á Á Ő ű ö ű ú Ö Ü Á

 í ö Ö Á í ö í í ö í ö ö í í ö ö ö ö í í ö í ö í ö í ü í í ö í í í í í ö ö í í í ú ö í í ö Á Á Á ü ú í ö Á í í í ö í í ü ö ö ö ö í ö í í í ú í í ű ú í í í í ö í ű í ö ö ü ö ű ö ö í í í í í ö ü í ö í ö ű
í ö Ö Á í ö í í ö í ö ö í í ö ö ö ö í í ö í ö í ö í ü í í ö í í í í í ö ö í í í ú ö í í ö Á Á Á ü ú í ö Á í í í ö í í ü ö ö ö ö í ö í í í ú í í ű ú í í í í ö í ű í ö ö ü ö ű ö ö í í í í í ö ü í ö í ö ű
 Ő Ö ö Ö É Á Ü É ó É ó ü É É Ö Ö Á É Ő ú É Á ú Ő Ö Ü Ö Ö ü ó ó ü Ü ű ö ú ó Á í ó ö ö ö ö ó ü í í Á í Ó í ó ü Ö ö ú ó ó ö ü ó ó ö í í ű ö ó í ü í ö í í ű ö ü Ő ü ú Ö ö ó ö ó ö ö ö ü ó ö í ó Ö ö Ő ü Ö Ö ü
Ő Ö ö Ö É Á Ü É ó É ó ü É É Ö Ö Á É Ő ú É Á ú Ő Ö Ü Ö Ö ü ó ó ü Ü ű ö ú ó Á í ó ö ö ö ö ó ü í í Á í Ó í ó ü Ö ö ú ó ó ö ü ó ó ö í í ű ö ó í ü í ö í í ű ö ü Ő ü ú Ö ö ó ö ó ö ö ö ü ó ö í ó Ö ö Ő ü Ö Ö ü
 ö é Ö é ü ö é ü ö é Ö é ü í ü ü ü é é ü é é Ö ö é é é é ö ü ö ü ö é é ö é é ö é é ö ö é í é ü é é é í é ö é é ö é ö é ü é ü ú é é é é é í é é é é ö ö é é ö ö é é í í é í é ü ö ü Á é ö Á í ö í é ö ü ö é
ö é Ö é ü ö é ü ö é Ö é ü í ü ü ü é é ü é é Ö ö é é é é ö ü ö ü ö é é ö é é ö é é ö ö é í é ü é é é í é ö é é ö é ö é ü é ü ú é é é é é í é é é é ö ö é é ö ö é é í í é í é ü ö ü Á é ö Á í ö í é ö ü ö é
 ú ű ö ö ü ü Í ö ö ö ö É Í É ú ú É ú ú ö É ö Í Ü ú Í ö ö Í ú ö ö ö ö ü ö ö ú ü Ü ö ü Í ö ö ű ö ö Í ű ú ö ö ö ö Í ö ö ű ö ö Í ü Í ü ú Í É ö ö ü ö ö Ü ö ö Í ü Í ö ü Í Í ö Í ö Í ü ö ú Í ú Í ö É ú Í ö ö Í É
ú ű ö ö ü ü Í ö ö ö ö É Í É ú ú É ú ú ö É ö Í Ü ú Í ö ö Í ú ö ö ö ö ü ö ö ú ü Ü ö ü Í ö ö ű ö ö Í ű ú ö ö ö ö Í ö ö ű ö ö Í ü Í ü ú Í É ö ö ü ö ö Ü ö ö Í ü Í ö ü Í Í ö Í ö Í ü ö ú Í ú Í ö É ú Í ö ö Í É
 É ö ö Í Í Í Ó Í Í Á Ó Á Ü Ú Í Á Á ű Á Ó Í Í É Á Ó Á Á ö ö Á Í Á Á ö ö ű ö ö Í Í ű Ö ű ö ö ű Í Í Ü ö ö Ó ű Í ö ö Í ö ö Ó ö Ö Í ö ö Ö ö ű ö ö Ó Í ű Ó ö ö ű ö ű Ö Ü Ö ű ű ö ö ö ö ö ö Íö ö Í Ö Ó ű ö ű ö ö
É ö ö Í Í Í Ó Í Í Á Ó Á Ü Ú Í Á Á ű Á Ó Í Í É Á Ó Á Á ö ö Á Í Á Á ö ö ű ö ö Í Í ű Ö ű ö ö ű Í Í Ü ö ö Ó ű Í ö ö Í ö ö Ó ö Ö Í ö ö Ö ö ű ö ö Ó Í ű Ó ö ö ű ö ű Ö Ü Ö ű ű ö ö ö ö ö ö Íö ö Í Ö Ó ű ö ű ö ö
 ő ö é ü ö é Ö é ő ü é í ü é é ő ö é ő ö Á ó ü ö é í é ö é Ö é ő ü ü é í é é ó é é í í é é ő ü í ő Ö í é ő é é ő é ő éü ú ü ö ő í Ú Ú ö É í í ü ó ó ó ü ő ö é í ó ö é í ö é é í ö é ó ű ő ö é ő ű ő í é í
ő ö é ü ö é Ö é ő ü é í ü é é ő ö é ő ö Á ó ü ö é í é ö é Ö é ő ü ü é í é é ó é é í í é é ő ü í ő Ö í é ő é é ő é ő éü ú ü ö ő í Ú Ú ö É í í ü ó ó ó ü ő ö é í ó ö é í ö é é í ö é ó ű ő ö é ő ű ő í é í
 Í ú ó ú ó ú ó ó Á ó ó ö ű ú Á ú ó ó ó Í ó ö ö ö Í ö ó ó ö ó ó ó ö ó ö ö ö ö ó ö ó ö ó ü ó ó ü ó ü ö ö ö ö Ő ó ó Íó ó ó ü ó ű ó ó ű ű ó ö ü ö ú ö ü ű ö ö ö ö ó ú ö ö ö ü Í Í Í Á ó ó ú ü ú Á ü ö Á ó ü ó
Í ú ó ú ó ú ó ó Á ó ó ö ű ú Á ú ó ó ó Í ó ö ö ö Í ö ó ó ö ó ó ó ö ó ö ö ö ö ó ö ó ö ó ü ó ó ü ó ü ö ö ö ö Ő ó ó Íó ó ó ü ó ű ó ó ű ű ó ö ü ö ú ö ü ű ö ö ö ö ó ú ö ö ö ü Í Í Í Á ó ó ú ü ú Á ü ö Á ó ü ó
2 - ELEKTROMOS BEKÖTÉSEK
 4. oldal 2 - ELEKTROMOS BEKÖTÉSEK 2A A VEZETÉKEK KERESZTMETSZETE - A vezérlőegység áramellátását (a külső biztosítódobozának csatlakozókapcsán) egy legalább 3x1,5 mm 2 -es vezetékkel kell megoldani. Amennyiben
4. oldal 2 - ELEKTROMOS BEKÖTÉSEK 2A A VEZETÉKEK KERESZTMETSZETE - A vezérlőegység áramellátását (a külső biztosítódobozának csatlakozókapcsán) egy legalább 3x1,5 mm 2 -es vezetékkel kell megoldani. Amennyiben
73R típusú vezérlő panel 24 V= egymotoros automatikákhoz, 433,92 MHz es beépített, négyfunkciós rádióval. Szerelési útmutató
 73R típusú vezérlő panel 24 V= egymotoros automatikákhoz, 433,92 MHz es beépített, négyfunkciós rádióval Szerelési útmutató - 2 - - 3 - ÁLTALÁNOS BIZTONSÁGI ÓVINTÉZKEDÉSEK Ez a szerelési utasítás csak
73R típusú vezérlő panel 24 V= egymotoros automatikákhoz, 433,92 MHz es beépített, négyfunkciós rádióval Szerelési útmutató - 2 - - 3 - ÁLTALÁNOS BIZTONSÁGI ÓVINTÉZKEDÉSEK Ez a szerelési utasítás csak
NC technológia és programozás I.
 NC technológia és programozás I. Történeti áttekintés Hagyományos szerszámgépek (egyetemes szerszámgépek) Gépészmérnök szak Dr. Sipos Jenő főiskolai tanár 2 Történeti áttekintés Másoló gépek Gépészmérnök
NC technológia és programozás I. Történeti áttekintés Hagyományos szerszámgépek (egyetemes szerszámgépek) Gépészmérnök szak Dr. Sipos Jenő főiskolai tanár 2 Történeti áttekintés Másoló gépek Gépészmérnök
2 - ELEKTROMOS BEKÖTÉSEK
 4. oldal 2A A VEZETÉKEK KERESZTMETSZETE 2 - ELEKTROMOS BEKÖTÉSEK - A vezérlıegység áramellátását (a külsı biztosítódobozának csatlakozókapcsán) egy legalább 3x1,5 mm 2 - es vezetékkel kell megoldani. Amennyiben
4. oldal 2A A VEZETÉKEK KERESZTMETSZETE 2 - ELEKTROMOS BEKÖTÉSEK - A vezérlıegység áramellátását (a külsı biztosítódobozának csatlakozókapcsán) egy legalább 3x1,5 mm 2 - es vezetékkel kell megoldani. Amennyiben
A PC vagyis a személyi számítógép. VI. rész A mikroprocesszort követően a számítógép következő alapvető építőegysége a memória
 i smer d meg! A PC vagyis a személyi számítógép VI. rész A mikroprocesszort követően a számítógép következő alapvető építőegysége a memória (lásd a klasszikus architekturájú univerzális számítógép rendszertömbvázlatát
i smer d meg! A PC vagyis a személyi számítógép VI. rész A mikroprocesszort követően a számítógép következő alapvető építőegysége a memória (lásd a klasszikus architekturájú univerzális számítógép rendszertömbvázlatát
LÉTESÍTMÉNYGAZDÁLKODÁS. Változáskezelés. Változás Pont Cím Oldal 2.0 2014.03.19 A teljes dokumentáció átírásra került 2.1 2014.07.14 8.
 ESZKÖZIGÉNY Felhasználói dokumentáció verzió 2.2. Budapest, 2015. Változáskezelés Verzió Dátum Változás Pont Cím Oldal 2.0 2014.03.19 A teljes dokumentáció átírásra került 2.1 2014.07.14 8.3 Új, oszlopszerkesztésbe
ESZKÖZIGÉNY Felhasználói dokumentáció verzió 2.2. Budapest, 2015. Változáskezelés Verzió Dátum Változás Pont Cím Oldal 2.0 2014.03.19 A teljes dokumentáció átírásra került 2.1 2014.07.14 8.3 Új, oszlopszerkesztésbe
a diplomamunka elkészítéséhez
 Ú T M U T A T Ó a diplomamunka elkészítéséhez Debrecen 2016. Bevezetés A módszertani útmutató célja, hogy a diplomamunka tartalmi és formai követelményeit ismertesse, és egyben segítséget nyújtson a sikeres
Ú T M U T A T Ó a diplomamunka elkészítéséhez Debrecen 2016. Bevezetés A módszertani útmutató célja, hogy a diplomamunka tartalmi és formai követelményeit ismertesse, és egyben segítséget nyújtson a sikeres
Üzemeltetési utasítás DULCO flex DFCa Tömlőszivattyú
 Üzemeltetési utasítás DULCO flex DFCa Tömlőszivattyú HU A0374 Először teljesen olvassa át az üzemeltetési útmutatókat. Ne dobja el. A telepítési- vagy kezelési hibák következtében fellépő károkért az üzemeltető
Üzemeltetési utasítás DULCO flex DFCa Tömlőszivattyú HU A0374 Először teljesen olvassa át az üzemeltetési útmutatókat. Ne dobja el. A telepítési- vagy kezelési hibák következtében fellépő károkért az üzemeltető