IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
|
|
|
- Tivadar Barta
- 6 évvel ezelőtt
- Látták:
Átírás

1 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József
2 Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét, a terhelhetőségét, a pontosságát. Az ipari robotok alkalmazhatóságát nemzetközi szabvány rögzíti (Manipulating industrial robots Performance criteria and related test methods ISO 9283). Ipari robotok munkatértípusai 2
3 Egy tetszőleges térbeli pont helyzetét 3 koordinátájával adhatjuk meg. Ez a pont elérhető 3 megfelelően egymásra épített robotkarral. A robot karjait, tagjait összekötő kényszerek lehetnek haladó (T=Transzlációs) kényszerek vagy forgó (R=Rotációs) kényszerek, csuklók. Általánosan a robot karokat összekötő kényszert robot csuklónak nevezik, és T vagy R betűvel jelölik. Ez a három tag a kétfajta kényszer segítségével 23=8 különböző változatban kapcsolhatók össze.
, és/vagy rotációs (R - forgó) mozgástengely.")
4 Az ipari robot kinematikai felépítését (a karrendszerét) a szabadságfokok, másképpen fogalmazva a mozgástengelyek határozzák meg. A mozgástengelyek lehetnek: transzlációs (T - egyenes vonal mentén elmozduló), és/vagy rotációs (R - forgó) mozgástengely. Megjegyzés: A megfogó szerkezet nyitás/zárás funkciója nem számít mozgástengelynek. Ipari robotok munkatértípusai 4
 mozgásokat végző ipari robot Ipari robotok")
5 Az ábrán látható egy jellemzően transzlációs (egyenes vonalú, lineáris) és egy jellemzően rotációs (forgó) mozgásokat végző ipari robot Ipari robotok munkatértípusai 5
6 A munkatér az ipari robot effektora (illetve pontosabban: a robot mechanikus csatlakozó felülete felületének középpontja, lásd a későbbiekben is) által bejárható tér. Az ipari robot fontos eleme az effektor. Az effektor az ipari robot tényleges munkát végző szerkezeti egysége. Alapvetően két csoportot különböztetnek meg, az effektor lehet: megfogó szerkezet, vagy szerszám. Ipari robotok munkatértípusai 6
7 A mozgástengelyeket (szabadságfokokat) szokták alap- vagy fő-, és segéd- vagy melléktengelyeknek is nevezni. A főtengelyek viszik a robot effektorát (megfogó szerkezetét vagy szerszámát) a munkatér előírás szerinti, programozott (kijelölt) helyére. A segédtengelyek (például a korábbi ábrán a 4., 5. és 6. tengelyek az effektor kívánt helyzetét (orientációját) állítják be, helyváltoztatásuk mértéke a főtengelyekhez viszonyítva kicsi. Ipari robotok munkatértípusai 7
8 Munkaterük alapján az ipari robotok a következő négy csoportba sorolhatók: hasáb, henger (-koordinátás), gömb (üreges), humanoid. Ipari robotok munkatértípusai 8

9 3T 1T+2R 2T+1R 3R
 munkatér 2T+1R kettő haladó + egy forgó mozgás")
10 Hasáb alakú munkatér 2T+1R 3T három haladó mozgás Derékszögű (Descartes) koord.rendszer 40% Henger alakú (üreges) munkatér 2T+1R kettő haladó + egy forgó mozgás Hengerkoordináták
 koord.")
11 Hasáb alakú munkatér 3T három haladó mozgás Derékszögű (Descartes) koord.rendszer 40%

12 Henger alakú (üreges) munkatér 2T+1R kettő haladó + egy forgó mozgás Hengerkoordináták 2T+1R
13 Gömb (üreges) alakú munkatér 1T+2R (egy haladó és kettő forgó mozgás) Gömbkoordináták b és c munkatér összesen kb. 12% Gömbalakú munkatér 3R (három forgástengely) Csuklókoordináták 40%

")
14 Gömbalakú munkatér 3R (három forgástengely) Csuklókoordináták 40%
15 1T+ 2R (akadálykerülő képesség) Kb % Szerelés (akadálykerülő képesség) SCARA típusú robot és munkatere


16 SCARA típusú robot és munkatere ADEPT SCARA
17

18 A hasáb ill. a gömb alakú munkaterek összehasonlítása: Tulajdonságok Hasáb (3T) Gömb (3R) Közvetlen Akadály felett átnyúlva is V, H, P V 3. Terhelő nyomaték Nagy Kicsi 4. Tárgy méretek Nagy Közepes 5. Szabadságfokok Elsősorban lineáris Elsősorban forgó Gyakorlatilag korlátlan Fellépő nyomaték által korlátozott Döntően egy síkban Tetszőleges Elsősorban pontvezérlés Szakasz és pont vezérlés 9. Pozícionáló egység Egyszerű Bonyolult 10. Üzemidő Közepes Nagy 11. Térkihasználás Közepes Közepes 1. Tárgy felvétel, lerakás 2. Energia 6. Mozgás utak 7. Térbeli pályapont helyzete 8. Vezérlés 18
19 Munkatértípusok összehasonlítása
20 Munkatértípusok összehasonlítása
21 Portálrobot felépítése (ABB)
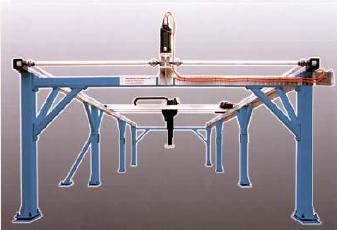
22 Portálrobot felépítése

23 Portálrobot (igm)

24 Robotok mukatértípusai Portál robot Wittmann


25 Csuklós robot Mitsubishi SCARA típusú robot Mitsubishi
26 SCARA típusú robot
27

28 Robotok mukatértípusai

29 FANUC A legnagyobb munkatértípusú Robot RÁBA Robotok mukatértípusai
30 Robotok mukatértípusai FANUC ROBOT SCARA robot

31 Robotok mukatértípusai ABB IRB 140-es robot

32 Különleges robotok Tricept robot három kar egyidejű mozgatásával tud lineáris mozgásokat végezni (3T), párhuzamos kinematikájú Előnyök: merev pontos Hátrányok: kisebb munkatér teherbírás Ritkán használják (bonyolult)

33 Robotok mukatértípusai Egy konkrét ipari robot munkatere (katalógusból)

34 Robotok mukatértípusai Hagyományos és Tricept robot munkatere
")
35 Robotok mukatértípusai Gyorsulása: 10 G Trhelhetősége: 2 kg ABB QuickMoveTM 4 tengelyes robot munkatere (IRB 340)
 Ipari robotok")
36 Különleges robotok Tripod robot (FESTO) Ipari robotok munkatértípusai 36

37 Robotok mukatértípusai Portál robot munkatere
38 Ipari robot mozgástér jellemzői Az ipari robotok ütközésvizsgálataihoz, valamint a robot környezetében található objektumok (például szerszámgépek, perifériák, stb.) elhelyezésének tervezéséhez ismerni szükséges az ipari robot mozgásteret. A mozgástér az a tér, amelyet a robot mozgása során annak valamely eleme elérhet. A mozgástér és a munkatér különbsége az un. holttér, ennek célszerűen kicsinek kell lennie Az ábra oldalnézetből (bal oldali ábra) és felülnézetből ábrázolja a robotot). A biztonsági tér pontjaiba a robot egyetlen eleme sem juthat el, valóban egy látszólag felesleges, de a biztonság szempontjából mégis fontos térrész. Ipari robotok munkatértípusai 38

39 Ipari robot mozgástér jellemzői (VDI 2861) a biztonsági tér b holttér c munkatér Veszélyzóna = a + b + c
40 Köszönöm a figyelmet!
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
GYÁRTÓCELLÁK IPARI ROBOTOK. Összefoglaló áttekintés. 1. előadás. Dr. Pintér József. Gyártócellák
 GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK. Összefoglaló áttekintés. 1. előadás. Dr. Pintér József. Gyártócellák
 GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
GYÁRTÓCELLÁK IPARI ROBOTOK Összefoglaló áttekintés Dr. Pintér József 1. előadás 1 Vázlat IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
NGB_AJ008_1 IPARI ROBOTOK
 Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
6. Robotok és manipulátorok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
6. Robotok és manipulátorok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti
6. Robotok a rugalmas gyártórendszerekben. 6.1 Manipulátorok
 6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
6. Robotok a rugalmas gyártórendszerekben Isaac Asimov: Én, a robot (1950), a robotika alaptörvényei A robot nem árthat az embernek, és nem nézheti tétlenül, ha az embert veszély fenyegeti Engedelmeskednie
2010.08.29. Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása. Kézi Gépesített Automatizált
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Forgácsolás technológia számítógépes BAGFS15NNC/NLC 11 - A szerelés automatizálása Dr.
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Forgácsolás technológia számítógépes BAGFS15NNC/NLC 11 - A szerelés automatizálása Dr.
Pneumatika az ipari alkalmazásokban
 Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Forgácsolás technológia számítógépes tervezése I.
 Forgácsolás technológia számítógépes tervezése I. BAGFS15NNB Szerelési rendszer elemei Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása A szerelés automatizálása
Forgácsolás technológia számítógépes tervezése I. BAGFS15NNB Szerelési rendszer elemei Anyagellátás biztosítása Szerelvény továbbítás Válogatás, rendezés Szerelési mővelet végrehajtása A szerelés automatizálása
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
ROBOTTECHNIKA. Ipari robotok szerkezeti egységei, terhelhetősége. Dr. Pintér József
 ROBOTTECHNIKA Ipari robotok szerkezeti egységei, terhelhetősége Dr. Pintér József Tartalom Ipari robotok osztályozása Ipari robotok szerkezeti egységei Ipari robotok terhelhetősége Vezetékek, csapágyak
ROBOTTECHNIKA Ipari robotok szerkezeti egységei, terhelhetősége Dr. Pintér József Tartalom Ipari robotok osztályozása Ipari robotok szerkezeti egységei Ipari robotok terhelhetősége Vezetékek, csapágyak
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA. 1. előadás. Dr. Pintér József. Robottechnika
 ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
Ipari robotok osztályozása, szerkezeti egységei
 ROBOTTECHNIKA Ipari robotok osztályozása, szerkezeti egységei 3. előadás Dr. Pintér József A robotok osztályozhatók: Robotok osztályozása, felépítésük Mozgásuk Munkaterületük Felépítésük Vezérlésük Feladatuk
ROBOTTECHNIKA Ipari robotok osztályozása, szerkezeti egységei 3. előadás Dr. Pintér József A robotok osztályozhatók: Robotok osztályozása, felépítésük Mozgásuk Munkaterületük Felépítésük Vezérlésük Feladatuk
Infobionika ROBOTIKA. IX. Előadás. Robot manipulátorok I. Alapfogalmak. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
GÉPIPARI AUTOMATIZÁLÁS
 GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
GÉPIPARI AUTOMATIZÁLÁS IPARI ROBOTOK FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
Robotika. A robotok története - bevezetés. Magyar Attila amagyar@almos.vein.hu
 Robotika A robotok története - bevezetés Magyar Attila amagyar@almos.vein.hu A robotok története Idő Irodalmi utalás, esemény Robot, vagy szerkezet Kr.e.1000 Kr.e. 800 Kr.e. 400 Kr.e. 300 Biblia (Ter.):
Robotika A robotok története - bevezetés Magyar Attila amagyar@almos.vein.hu A robotok története Idő Irodalmi utalás, esemény Robot, vagy szerkezet Kr.e.1000 Kr.e. 800 Kr.e. 400 Kr.e. 300 Biblia (Ter.):
ROBOTTECHNIKA ALKALMAZÁSOK, ROBOT FOGALMA. Dr. Pintér József
 ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
FANUC Robottípusok, alkalmazások. Anyagmozgatás, szerelés, stb. Festés, lakkozás. Hegesztés
 FANUC Ipari Robotok FANUC Robottípusok, alkalmazások Festés, lakkozás Anyagmozgatás, szerelés, stb. Hegesztés Festő robotcellák A festő cellák sajátosságai általában: Speciális robbanásbiztos cella elszívással
FANUC Ipari Robotok FANUC Robottípusok, alkalmazások Festés, lakkozás Anyagmozgatás, szerelés, stb. Hegesztés Festő robotcellák A festő cellák sajátosságai általában: Speciális robbanásbiztos cella elszívással
Előadó: Nagy István (A65) Gyakorlatvezető: Tolnai András
 Gyakorlatvezető: Tolnai András") Ipari Robotok Programozása BEVEZETÉS Előadó: Nagy István (A65) Gyakorlatvezető: Tolnai András Ajánlott irodalom: B. Leatham-Jones: Elements of Industrial Robotics, Pitman Publishing, 1987. CH. Blume, W.
Ipari Robotok Programozása BEVEZETÉS Előadó: Nagy István (A65) Gyakorlatvezető: Tolnai András Ajánlott irodalom: B. Leatham-Jones: Elements of Industrial Robotics, Pitman Publishing, 1987. CH. Blume, W.
Ipari robotok megfogó szerkezetei
 IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó
IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás
 Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
Megmunkáló központok munkadarab ellátása, robotos kiszolgálás Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek
2. E L Ő A D Á S D R. H U S I G É Z A
 Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
SZÉCHENYI ISTVÁN EGYETEM GYŐR. Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán Robotcella A robotcella fő elemei: Robot Robot fejegység (effektor), Több fej esetén tartóállvány Biztonsági elkerítés
SZÉCHENYI ISTVÁN EGYETEM GYŐR Cella felépítés, robotmozgatás bemutatása Fanuc gyártócellán Robotcella A robotcella fő elemei: Robot Robot fejegység (effektor), Több fej esetén tartóállvány Biztonsági elkerítés
Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
 A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
Ipari robotok. szerkezeti egységei
 ROBOTTECHNIKA Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk Energiaforrásuk
ROBOTTECHNIKA Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk Energiaforrásuk
670 milliszekundumos csomagolási ciklusidő
 670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
Robottechnika. 2. Ipari robotok. Ballagi Áron Automatizálási Tanszék
 Robottechnika 2. Ipari robotok Ballagi Áron Automatizálási Tanszék IGM látogatás, oktatás IGM Robotrendszerek Kft. Hegesztőrobotok specialistája http://www.igm-group.com/hu Max. 8 fő! akiket tényleg érdekel
Robottechnika 2. Ipari robotok Ballagi Áron Automatizálási Tanszék IGM látogatás, oktatás IGM Robotrendszerek Kft. Hegesztőrobotok specialistája http://www.igm-group.com/hu Max. 8 fő! akiket tényleg érdekel
5.2 Rugalmas gyártórendszerek alrendszerei. a) A megmunkáló alrendszer és elemei. Megmunkáló alrendszer. Megmunkáló központ
 A megmunkáló alrendszer és elemei. Megmunkáló alrendszer. Megmunkáló központ") Megmunkáló alrendszer 5.2 Rugalmas gyártórendszerek alrendszerei a munkadarabokon a technológiai műveletek elvégzése gyártóberendezések készülékek szerszámok mérőeszközök Anyagmozgatási alrendszer a munkadarabok
Megmunkáló alrendszer 5.2 Rugalmas gyártórendszerek alrendszerei a munkadarabokon a technológiai műveletek elvégzése gyártóberendezések készülékek szerszámok mérőeszközök Anyagmozgatási alrendszer a munkadarabok
A Hamilton-Jacobi-egyenlet
 A Hamilton-Jacobi-egyenlet Ha sikerül olyan kanonikus transzformációt találnunk, amely a Hamilton-függvényt zérusra transzformálja akkor valamennyi új koordináta és impulzus állandó lesz: H 0 Q k = H P
A Hamilton-Jacobi-egyenlet Ha sikerül olyan kanonikus transzformációt találnunk, amely a Hamilton-függvényt zérusra transzformálja akkor valamennyi új koordináta és impulzus állandó lesz: H 0 Q k = H P
CNC Robot Robomachine. M-2iA
 CNC Robot Robomachine M-2iA M-2iA/3S M-2iA/3SL Tartalom Bevezetés... 03 Főbb jellemzők... 04 Műszaki adatok... 05 Csuklóterhelési diagram Normál tehetetlenségű üzemmód... 06 Opció: nagy tehetetlenségű
CNC Robot Robomachine M-2iA M-2iA/3S M-2iA/3SL Tartalom Bevezetés... 03 Főbb jellemzők... 04 Műszaki adatok... 05 Csuklóterhelési diagram Normál tehetetlenségű üzemmód... 06 Opció: nagy tehetetlenségű
9. SZERSZÁMOK POZÍCIONÁLÁSA
 9. SZERSZÁMOK POZÍCIONÁLÁSA Meghatározás A szerszámok pozícionálásakor, nagy gondot kell fordítani a potenciálisan fennálló ütközések elkerülésére, valamint biztosítanunk kell, hogy a szerszámgép forgatási
9. SZERSZÁMOK POZÍCIONÁLÁSA Meghatározás A szerszámok pozícionálásakor, nagy gondot kell fordítani a potenciálisan fennálló ütközések elkerülésére, valamint biztosítanunk kell, hogy a szerszámgép forgatási
Infobionika ROBOTIKA. XI. Előadás. Robot manipulátorok III. Differenciális kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA XI. Előadás Robot manipulátorok III. Differenciális kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom A forgatási mátrix időbeli deriváltja A geometriai
Infobionika ROBOTIKA XI. Előadás Robot manipulátorok III. Differenciális kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom A forgatási mátrix időbeli deriváltja A geometriai
7. Koordináta méréstechnika
 7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK ÁTTEKINTÉS Sajtológépek felosztása Működtetés szerint: Mechanikus sajtológépek (excenteres, könyökemelős vagy más mechanizmussal
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK ÁTTEKINTÉS Sajtológépek felosztása Működtetés szerint: Mechanikus sajtológépek (excenteres, könyökemelős vagy más mechanizmussal
Gyártórendszerek fejlődésének fázisai
 Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
Gyártórendszerek fejlődésének fázisai A 1960-as évek vége: szerszámgépek közvetlen számítógépes vezérlése (CNC- DNC) 70-es évek: automatikus szerszámcsere és munkadarab mozgatás rugalmas gyártórendszerek
HELYI TANTERV. Mechanika
 HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás robotra
 Budapesti M szaki És Gazdaságtudományi Egyetem Gépészmérnöki Kar M szaki Mechanikai Tanszék Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás
Budapesti M szaki És Gazdaságtudományi Egyetem Gépészmérnöki Kar M szaki Mechanikai Tanszék Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás
A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás. 2012/13 2. félév Dr.
 A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás 2012/13 2. félév Dr. Kulcsár Gyula Forgácsolás, fúrás, furatmegmunkálás Forgácsolás Forgácsoláskor
A termelésinformatika alapjai 10. gyakorlat: Forgácsolás, fúrás, furatmegmunkálás, esztergálás, marás 2012/13 2. félév Dr. Kulcsár Gyula Forgácsolás, fúrás, furatmegmunkálás Forgácsolás Forgácsoláskor
Az ipari robotok definíciója
 Robot manipulátorok Az ipari robotok definíciója Mechanikai struktúra vagy manipulátor, amely merev testek (szegmensek) sorozatából áll, melyeket összeillesztések (csuklók, ízületek) kapcsolnak össze A
Robot manipulátorok Az ipari robotok definíciója Mechanikai struktúra vagy manipulátor, amely merev testek (szegmensek) sorozatából áll, melyeket összeillesztések (csuklók, ízületek) kapcsolnak össze A
Vízszintes kitűzések. 1-3. gyakorlat: Vízszintes kitűzések
 Vízszintes kitűzések A vízszintes kitűzések végrehajtása során általában nem találkozunk bonyolult számítási feladatokkal. A kitűzési munka nehézségeit elsősorban a kedvezőtlen munkakörülmények okozzák,
Vízszintes kitűzések A vízszintes kitűzések végrehajtása során általában nem találkozunk bonyolult számítási feladatokkal. A kitűzési munka nehézségeit elsősorban a kedvezőtlen munkakörülmények okozzák,
Géprajz - gépelemek. AXO OMETRIKUS ábrázolás
 Géprajz - gépelemek AXO OMETRIKUS ábrázolás Előadó: Németh Szabolcs mérnöktanár Belső használatú jegyzet http://gepesz-learning.shp.hu 1 Egyszerű testek látszati képe Ábrázolási módok: 1. Vetületi 2. Perspektivikus
Géprajz - gépelemek AXO OMETRIKUS ábrázolás Előadó: Németh Szabolcs mérnöktanár Belső használatú jegyzet http://gepesz-learning.shp.hu 1 Egyszerű testek látszati képe Ábrázolási módok: 1. Vetületi 2. Perspektivikus
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Összeállítás 01 gyakorló feladat
 Összeállítás 01 gyakorló feladat Összeállítás-modellezés szerelési kényszerek Feladat: Készítse el az alábbi ábrán látható kézi működtetésű szelep összeállítás modelljét! A rajzkészítés nem része a feladatnak!
Összeállítás 01 gyakorló feladat Összeállítás-modellezés szerelési kényszerek Feladat: Készítse el az alábbi ábrán látható kézi működtetésű szelep összeállítás modelljét! A rajzkészítés nem része a feladatnak!
Mester Gyula 2003 Intelligens robotok és rendszerek
 Mester Gyula 003 Intelligens robotok és rendszerek Robotmanipulátorok kinematikája Robotmanipulátorok dinamikája Robotmanipulátorok szabad mozgásának hagyományos irányítása Robotmanipulátorok adaptív irányítása
Mester Gyula 003 Intelligens robotok és rendszerek Robotmanipulátorok kinematikája Robotmanipulátorok dinamikája Robotmanipulátorok szabad mozgásának hagyományos irányítása Robotmanipulátorok adaptív irányítása
Forgácsoló gyártócellák, gyártórendszerek 1.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
GÉPIPARI AUTOMATIZÁLÁS Ipari robotok. szerkezeti egységei
 GÉPIPARI AUTOMATIZÁLÁS Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk
GÉPIPARI AUTOMATIZÁLÁS Ipari robotok osztályoz lyozása, szerkezeti egységei gei 3. előad adás Dr. Pintér r JózsefJ A robotok osztályozhatók: Mozgásuk Munkaterület letük Felépítésük Vezérl rlésük Feladatuk
ÁGAZATI SZAKMAI ÉRETTSÉGI VIZSGA GÉPÉSZET ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK
 GÉPÉSZET ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK 1. tétel A. Ismertesse az anyagok tűzveszélyességi, valamint az építmények kockázati osztályba sorolását! B. Ismertesse a szerelési
GÉPÉSZET ISMERETEK EMELT SZINTŰ SZÓBELI VIZSGA MINTAFELADATOK ÉS ÉRTÉKELÉSÜK 1. tétel A. Ismertesse az anyagok tűzveszélyességi, valamint az építmények kockázati osztályba sorolását! B. Ismertesse a szerelési
IV. LEGO Robotprogramozó Országos Csapatverseny
 BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
BÁNYAI JÚLIA GIMNÁZIUM - ROBOTIKA CSOPORT Tel.: 76/481-474 (+36 20 479 8460) Fax.: 76/486-942 web: http://www.banyai-kkt.sulinet.hu/robotika e-mail: robotika.bjg@gmail.com IV. LEGO Robotprogramozó Országos
Robottechnika. 1. Bevezetés. Ballagi Áron Automatizálási Tanszék
 Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Ballagi Áron tanszékvezető-helyettes, egyetemi adjunktus Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Ballagi Áron tanszékvezető-helyettes, egyetemi adjunktus Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5
 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5") KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait:
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait:
Programozott vezérlések (NGB_AU026)
") Programozott vezérlések (NGB_AU026) SMC IPC-202A folyadékcsomagoló egység programozása Bajzek Patrik A59SUA Illés József Y6NXZA Kardos Péter EWR0PS Kelemen János G781BE Kovács Benedek E002J6 A projekt
Programozott vezérlések (NGB_AU026) SMC IPC-202A folyadékcsomagoló egység programozása Bajzek Patrik A59SUA Illés József Y6NXZA Kardos Péter EWR0PS Kelemen János G781BE Kovács Benedek E002J6 A projekt
Tűrések. 12. előadás
 Tűrések 12. előadás A kész munkadarabok többé-kevésbé eltérnek a rajzon ábrázolt munkadaraboktól Az eltérés háromféle lehet: méreteltérés alakeltérés helyzeteltérés Tűrésmező Széchenyi Tűrésmező A körülmények
Tűrések 12. előadás A kész munkadarabok többé-kevésbé eltérnek a rajzon ábrázolt munkadaraboktól Az eltérés háromféle lehet: méreteltérés alakeltérés helyzeteltérés Tűrésmező Széchenyi Tűrésmező A körülmények
Versenyző kódja: 38 27/2012. (VIII. 27.) NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.
 NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.") 54 523 04-2015 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
54 523 04-2015 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5
 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5") KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait: a)
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait: a)
Osztályozó, javító vizsga 9. évfolyam gimnázium. Írásbeli vizsgarész ELSŐ RÉSZ
 Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Forgácsoló megmunkálások áttekintése 2.
 Gyártócellák (NGB_AJ018_1) Forgácsoló megmunkálások áttekintése 2. Bevezetés Dr. Pintér József 2 Tartalom A forgácsolási eljárások csoportosítása Esztergálás és változatai Fúrás és változatai Marás és
Gyártócellák (NGB_AJ018_1) Forgácsoló megmunkálások áttekintése 2. Bevezetés Dr. Pintér József 2 Tartalom A forgácsolási eljárások csoportosítása Esztergálás és változatai Fúrás és változatai Marás és
Elektronikus közelítéskapcsolók
 Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
CNC programozás. Alap ismeretek. Készített: Hatos István
 CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
9. előadás. Térbeli koordinátageometria
 9. előadás Térbeli koordinátageometria Koordinátageometria a térben Descartes-féle koordinátarendszerben dolgozunk. A legegyszerűbb alakzatokat fogjuk vizsgálni. Az ezeket leíró egyenletek első-, vagy
9. előadás Térbeli koordinátageometria Koordinátageometria a térben Descartes-féle koordinátarendszerben dolgozunk. A legegyszerűbb alakzatokat fogjuk vizsgálni. Az ezeket leíró egyenletek első-, vagy
Robotika. Kinematika. Magyar Attila
 Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS
 KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS 1 EGYENLETES KÖRMOZGÁS Pálya kör Út ív Definíció: Test körpályán azonos irányban haladva azonos időközönként egyenlő íveket tesz meg. Periodikus mozgás 2 PERIODICITÁS
KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS 1 EGYENLETES KÖRMOZGÁS Pálya kör Út ív Definíció: Test körpályán azonos irányban haladva azonos időközönként egyenlő íveket tesz meg. Periodikus mozgás 2 PERIODICITÁS
Pálya : Az a vonal, amelyen a mozgó test végighalad. Út: A pályának az a része, amelyet adott idő alatt a mozgó tárgy megtesz.
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
TAKISAWA TMM 200 ellenorsós CNC esztergagép, hajtott szerszámokkal és Y tengellyel FANUC 180is TB vezérl vel
 TAKISAWA TMM 200 ellenorsós CNC esztergagép, hajtott szerszámokkal és Y tengellyel FANUC 180is TB vezérl vel ALAPKIVITEL - 32 bit FANUC vezérlés, DNC, és internet csatlakozással, - 10,4 színes kijelz,
TAKISAWA TMM 200 ellenorsós CNC esztergagép, hajtott szerszámokkal és Y tengellyel FANUC 180is TB vezérl vel ALAPKIVITEL - 32 bit FANUC vezérlés, DNC, és internet csatlakozással, - 10,4 színes kijelz,
Korszerű szerszámgépek
 SZÉCHENYI ISTVÁN EGYETEM GYŐR SZERSZÁMGÉPEK (NGB_AJ009_2) Korszerű szerszámgépek Összeállította: Dr. Pintér József 2011.09.26. Korszerű szerszámgépek 1 Korszerű szerszámgépek VÁZLAT 1. Kinematikai alapok,
SZÉCHENYI ISTVÁN EGYETEM GYŐR SZERSZÁMGÉPEK (NGB_AJ009_2) Korszerű szerszámgépek Összeállította: Dr. Pintér József 2011.09.26. Korszerű szerszámgépek 1 Korszerű szerszámgépek VÁZLAT 1. Kinematikai alapok,
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Robottechnika. 1. Bevezetés. Ballagi Áron Automatizálási Tanszék
 Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Dr. Ballagi Áron tanszékvezető-helyettes, egyetemi docens Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Dr. Ballagi Áron tanszékvezető-helyettes, egyetemi docens Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
Koordinátarendszerek
 Koordinátarendszerek KO 1 Koordinátarendszerek Ponthalmazok előállításai Koordinátarendszerek KO Két gyakran alkalmazott síkbeli koordinátarendszer Derékszögű (Descartes féle) koordinátarendszer Síkbeli
Koordinátarendszerek KO 1 Koordinátarendszerek Ponthalmazok előállításai Koordinátarendszerek KO Két gyakran alkalmazott síkbeli koordinátarendszer Derékszögű (Descartes féle) koordinátarendszer Síkbeli
VisualNastran4D. kinematikai vizsgálata, szimuláció
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
6. MECHANIKA-STATIKA GYAKORLAT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya, Culmann-szerkesztés, Ritter-számítás
 ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás
 Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás Első félév A modul időtartama: A modul célja: A modul tartalma: 8 foglalkozás, alkalmanként
Neumann János Számítógép-tudományi Társaság Programozás, robotprogramozás szakkör Három félév 3 * 8 foglalkozás Első félév A modul időtartama: A modul célja: A modul tartalma: 8 foglalkozás, alkalmanként
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
CAD/CAM, CNC programozó technológus (FAT lajstromszám: PL-5608)
") CAD/CAM, CNC programozó technológus (FAT lajstromszám: PL-5608) Tanfolyam kezdés (befejezés) várható időpontja: 2013. november 30. 09:00-2014. június 2014. május - 2015. január Tanfolyami díj: A képzőnél
CAD/CAM, CNC programozó technológus (FAT lajstromszám: PL-5608) Tanfolyam kezdés (befejezés) várható időpontja: 2013. november 30. 09:00-2014. június 2014. május - 2015. január Tanfolyami díj: A képzőnél
Láthatósági kérdések
 Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
INTELLIGENS ROBOTOK ÉS RENDSZEREK
 INTELLIGENS ROBOTOK ÉS RENDSZEREK Mester Gyula Dr. Mester Gyula Robotkinematika 1 ROBOTMANIPULÁTOROK KINEMATIKÁJA Mester Gyula Dr. Mester Gyula Robotkinematika 2 1.1 ROBOTMANIPULÁTOROK GEOMETRIAI MODELLJE
INTELLIGENS ROBOTOK ÉS RENDSZEREK Mester Gyula Dr. Mester Gyula Robotkinematika 1 ROBOTMANIPULÁTOROK KINEMATIKÁJA Mester Gyula Dr. Mester Gyula Robotkinematika 2 1.1 ROBOTMANIPULÁTOROK GEOMETRIAI MODELLJE
A tér lineáris leképezései síkra
 A tér lineáris leképezései síkra Az ábrázoló geometria célja: A háromdimenziós térben elhelyezkedő alakzatok helyzeti és metrikus viszonyainak egyértelmű és egyértelműen rekonstruálható módon történő ábrázolása
A tér lineáris leképezései síkra Az ábrázoló geometria célja: A háromdimenziós térben elhelyezkedő alakzatok helyzeti és metrikus viszonyainak egyértelmű és egyértelműen rekonstruálható módon történő ábrázolása
GÉPELEMEK EGYSZERÜSÍTETT ÁBRÁZOLÁSA
 GÉPELEMEK EGYSZERÜSÍTETT ÁBRÁZOLÁSA CSAVAROK ÉS CSAVARKÖTÉSEK ÁBRÁZOLÁSA A csavarok gépészeti jellemzése A csavarok funkciói Alkatrészek rögzítése Alkatrészek mozgatása (forgó mozgás átalakítása haladó
GÉPELEMEK EGYSZERÜSÍTETT ÁBRÁZOLÁSA CSAVAROK ÉS CSAVARKÖTÉSEK ÁBRÁZOLÁSA A csavarok gépészeti jellemzése A csavarok funkciói Alkatrészek rögzítése Alkatrészek mozgatása (forgó mozgás átalakítása haladó
Ipari robotok hajtása
 IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
IPARI ROBOTOK Ipari robotok hajtása 4. előad adás Dr. Pintér r JózsefJ A hajtási rendszerek feladata az, hogy a robot TCP pontját az előírt pontossággal - az irányítórendszer utasításainak megfelelően
Ábragyűjtemény levelező hallgatók számára
 Ábragyűjtemény levelező hallgatók számára Ez a bemutató a tanszéki Fizika jegyzet kiegészítése Mechanika I. félév 1 Stabilitás Az úszás stabilitása indifferens a stabil, b labilis S súlypont Sf a kiszorított
Ábragyűjtemény levelező hallgatók számára Ez a bemutató a tanszéki Fizika jegyzet kiegészítése Mechanika I. félév 1 Stabilitás Az úszás stabilitása indifferens a stabil, b labilis S súlypont Sf a kiszorított
A Maxwell - kerékről. Maxwell - ingának is nevezik azt a szerkezetet, melyről most lesz szó. Ehhez tekintsük az 1. ábrát is!
 1 A Maxwell - kerékről Maxwell - ingának is nevezik azt a szerkezetet, melyről most lesz szó. Ehhez tekintsük az 1. ábrát is! 1. ábra forrása: [ 1 ] Itt azt láthatjuk, hogy egy r sugarú kis hengerre felerősítettek
1 A Maxwell - kerékről Maxwell - ingának is nevezik azt a szerkezetet, melyről most lesz szó. Ehhez tekintsük az 1. ábrát is! 1. ábra forrása: [ 1 ] Itt azt láthatjuk, hogy egy r sugarú kis hengerre felerősítettek
CNC Robot Robomachine. LR Mate 200iD
 CNC Robot Robomachine LR Mate 200iD LR Mate 200iD Tartalom Bevezetés 03 Főbb jellemzők 04 Opciók 05 Műszaki adatok 06 Csuklóterhelési diagram 07 Méretek Munkatér és külső méretek 08 Csukló 09 Ráépített
CNC Robot Robomachine LR Mate 200iD LR Mate 200iD Tartalom Bevezetés 03 Főbb jellemzők 04 Opciók 05 Műszaki adatok 06 Csuklóterhelési diagram 07 Méretek Munkatér és külső méretek 08 Csukló 09 Ráépített
Cella létrehozása. A roboguide programot elindítva az 1.ábra szerinti bejelentkező ablakot kapjuk.
 Roboguide kézikönyv Cella létrehozása A roboguide programot elindítva az 1.ábra szerinti bejelentkező ablakot kapjuk. 1. ábra 1. Új cella létrehozásához kattintson a Start New Cell-re. 2. Adja meg a cella
Roboguide kézikönyv Cella létrehozása A roboguide programot elindítva az 1.ábra szerinti bejelentkező ablakot kapjuk. 1. ábra 1. Új cella létrehozásához kattintson a Start New Cell-re. 2. Adja meg a cella
6. MECHANIKA-STATIKA GYAKORLAT (kidolgozta: Triesz Péter, egy. ts.; Tarnai Gábor, mérnöktanár)
") SZÉHNYI ISTVÁN GYT LKLZOTT HNIK TNSZÉK 6. HNIK-STTIK GYKORLT (kidolgozta: Triesz Péter egy. ts.; Tarnai Gábor mérnöktanár) Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa gy létrát egy
SZÉHNYI ISTVÁN GYT LKLZOTT HNIK TNSZÉK 6. HNIK-STTIK GYKORLT (kidolgozta: Triesz Péter egy. ts.; Tarnai Gábor mérnöktanár) Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa gy létrát egy
9. Üreges testek gyártása
 9. Üreges testek gyártása Bevezetés Extrúziós fúvás a folyamat elemi lépései berendezés, működés az extrúziós fúvás folyamata terméktulajdonságok Fröccsfúvás Orientációs fúvás Rotációs öntés berendezés
9. Üreges testek gyártása Bevezetés Extrúziós fúvás a folyamat elemi lépései berendezés, működés az extrúziós fúvás folyamata terméktulajdonságok Fröccsfúvás Orientációs fúvás Rotációs öntés berendezés
Chasles tételéről. Előkészítés
 1 Chasles tételéről A minap megint találtunk valami érdekeset az interneten. Az [ 1 ] tankönyvet, illetve an - nak fejezetenként felrakott egyetemi internetes változatát. Utóbbi 20. fejezetében volt az,
1 Chasles tételéről A minap megint találtunk valami érdekeset az interneten. Az [ 1 ] tankönyvet, illetve an - nak fejezetenként felrakott egyetemi internetes változatát. Utóbbi 20. fejezetében volt az,
Lehet hogy igaz, de nem biztos. Biztosan igaz. Lehetetlen. A paralelogrammának van szimmetria-középpontja. b) A trapéznak két szimmetriatengelye van.
 A trapéznak két szimmetriatengelye van.") Geometria, sokszögek, szögek, -, 2004_01/5 Lili rajzolt néhány síkidomot: egy háromszöget, egy deltoidot, egy paralelogrammát és egy trapézt. A következő állítások ezekre vonatkoznak. Tegyél * jelet a
Geometria, sokszögek, szögek, -, 2004_01/5 Lili rajzolt néhány síkidomot: egy háromszöget, egy deltoidot, egy paralelogrammát és egy trapézt. A következő állítások ezekre vonatkoznak. Tegyél * jelet a
XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA
 XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA Kolozsvár, 2010. március 25-26. ÍVHEGESZTŐ ROBOT ALKALMAZÁSTECHNIKAI JELLEMZŐI BAGYINSZKI Gyula, BITAY Enikő Abstract The arc welding is the important joining
XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA Kolozsvár, 2010. március 25-26. ÍVHEGESZTŐ ROBOT ALKALMAZÁSTECHNIKAI JELLEMZŐI BAGYINSZKI Gyula, BITAY Enikő Abstract The arc welding is the important joining
CNC gépek szerszámellátása
 CNC gépek szerszámellátása Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek I.-II., BMF Czéh Mihály Hervay Péter
CNC gépek szerszámellátása Magyarkúti József BGK-AGI 2009 Figyelem! Az előadásvázlat nem helyettesíti a tankönyvet Dr. Nagy P. Sándor: Gyártóberendezések és rendszerek I.-II., BMF Czéh Mihály Hervay Péter
+ Egyszeres muködésu szögletes henger: +Tömlohenger: (17. ábra) Jellemzok
 Jellemzok") 19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
CNC technika. segédlet a CNC tantárgy oktatásához. Készítette: Paróczai János 2005.12.08
 CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
TestLine - 7. Fizika Témazáró Erő, munka, forgatónyomaték Minta feladatsor
 gészítsd ki a mondatot! egyenes vonalú egyensúlyban erő hatások mozgást 1. 2:57 Normál Ha a testet érő... kiegyenlítik egymást, azt mondjuk, hogy a test... van. z egyensúlyban lévő test vagy nyugalomban
gészítsd ki a mondatot! egyenes vonalú egyensúlyban erő hatások mozgást 1. 2:57 Normál Ha a testet érő... kiegyenlítik egymást, azt mondjuk, hogy a test... van. z egyensúlyban lévő test vagy nyugalomban
TestLine - 7. Fizika Témazáró Erő, munka, forgatónyomaték Minta feladatsor
 gészítsd ki a mondatokat Válasz lehetőségek: (1) a föld középpontja felé mutató erőhatást 1. fejt ki., (2) az alátámasztásra vagy a felfüggesztésre hat., (3) két 4:15 Normál különböző erő., (4) nyomja
gészítsd ki a mondatokat Válasz lehetőségek: (1) a föld középpontja felé mutató erőhatást 1. fejt ki., (2) az alátámasztásra vagy a felfüggesztésre hat., (3) két 4:15 Normál különböző erő., (4) nyomja
2.9.1. TABLETTÁK ÉS KAPSZULÁK SZÉTESÉSE
 2.9.1 Tabletták és kapszulák szétesése Ph.Hg.VIII. Ph.Eur.6.3-1 01/2009:20901 2.9.1. TABLETTÁK ÉS KAPSZULÁK SZÉTESÉSE A szétesésvizsgálattal azt határozzuk meg, hogy az alábbiakban leírt kísérleti körülmények
2.9.1 Tabletták és kapszulák szétesése Ph.Hg.VIII. Ph.Eur.6.3-1 01/2009:20901 2.9.1. TABLETTÁK ÉS KAPSZULÁK SZÉTESÉSE A szétesésvizsgálattal azt határozzuk meg, hogy az alábbiakban leírt kísérleti körülmények
NAGYFESZÜLTSÉGŰ ALÁLLOMÁSI SZERELVÉNYEK. Csősín csatlakozó. (Kivonatos katalógus) A katalógusban nem szereplő termékigény esetén forduljon irodánkhoz.
 A katalógusban nem szereplő termékigény esetén forduljon irodánkhoz.") NAGYFESZÜLTSÉGŰ ALÁLLOMÁSI SZERELVÉNYEK Csősín csatlakozó (Kivonatos katalógus) A katalógusban nem szereplő termékigény esetén forduljon irodánkhoz. 1 A katalógus használata A táblázat tetején szerepel
NAGYFESZÜLTSÉGŰ ALÁLLOMÁSI SZERELVÉNYEK Csősín csatlakozó (Kivonatos katalógus) A katalógusban nem szereplő termékigény esetén forduljon irodánkhoz. 1 A katalógus használata A táblázat tetején szerepel
Egyenes mert nincs se kezdő se végpontja
 Szakasz mert van két végpontja Egyenes mert nincs se kezdő se végpontja Tört vonal Szög mert van két szára és csúcsa Félegyenes mert van egy kezdőpontja 5 1 1 Két egyenes egymásra merőleges ha egymással
Szakasz mert van két végpontja Egyenes mert nincs se kezdő se végpontja Tört vonal Szög mert van két szára és csúcsa Félegyenes mert van egy kezdőpontja 5 1 1 Két egyenes egymásra merőleges ha egymással
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS-
 A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
Beavatkozószervek. Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék
 Beavatkozószervek Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék 2007.12.02. 1 Beavatkozószervek beavatkozószervek feladatuk: az irányítórendszertől (szabályzó
Beavatkozószervek Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék 2007.12.02. 1 Beavatkozószervek beavatkozószervek feladatuk: az irányítórendszertől (szabályzó
Lengyelné Dr. Szilágyi Szilvia április 7.
 ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
EGYSZERŰ GÉPEK. Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét.
 EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb