7. Koordináta méréstechnika
|
|
|
- Győző Pintér
- 10 évvel ezelőtt
- Látták:
Átírás
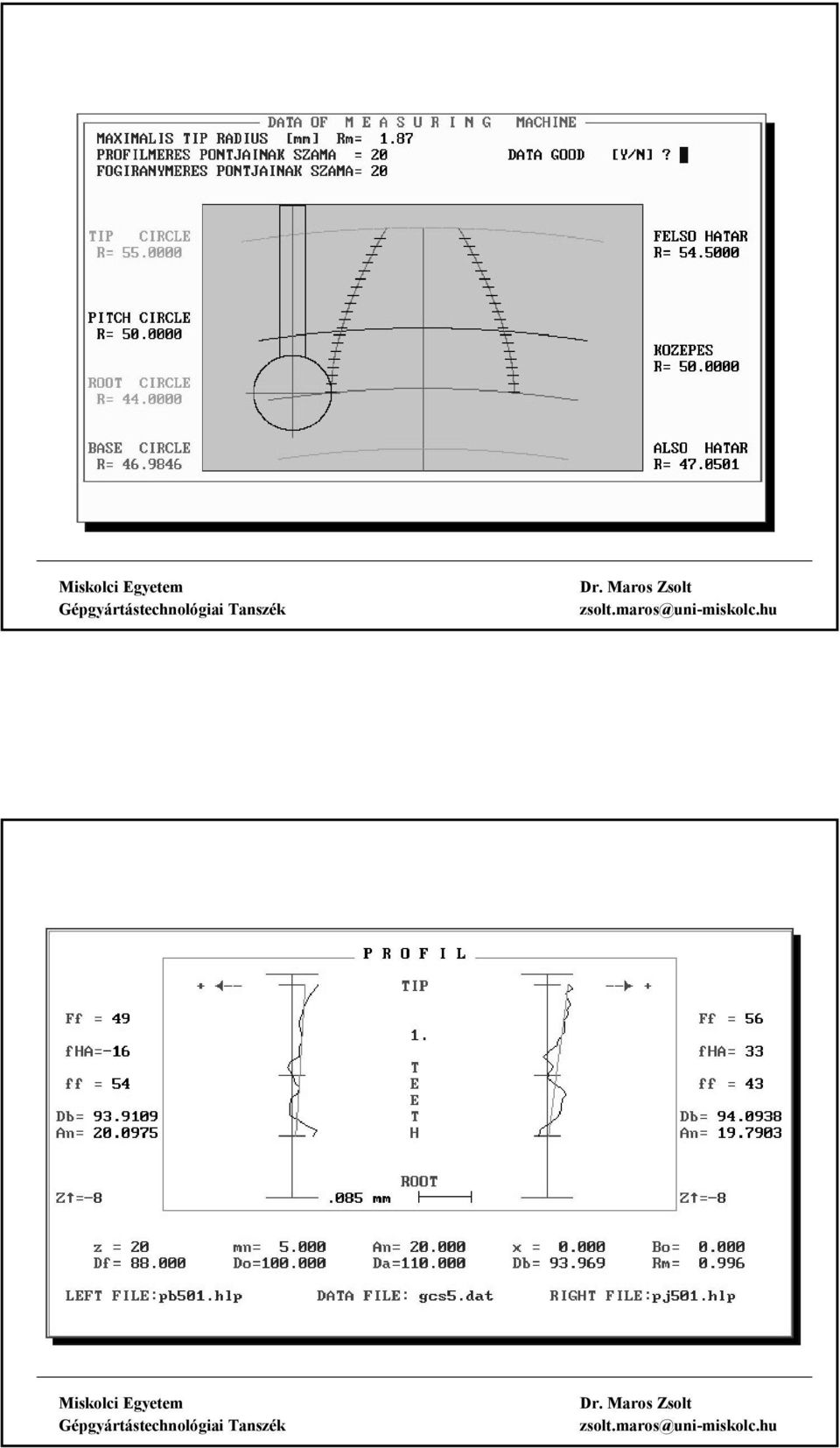
1 7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta méréstechnika megjelenése és térhódítása
")
2 Hagyományos méréstechnika: A vizsgált elem két pontjának összehasonlítása a mérőeszközzel ill annak skálájával Koordináta méréstechnika: A vizsgált elemen megérintett pontok alapján felvett geometriai (matematikai) elem összehasonlítása az elméleti matematikai elemmel érintési pontok felvétele felület illesztése a mért pontokra az elméleti és a mért felület összevetése mért elemek közötti műveletek képzése

3 Elemek: 7.1 Koordináta mérőrendszer elemei és folyamata mechanikai rendszer vezérlés központi számítógép A mechanikai rendszer jellegzetességei: márvány gépasztal 3 koordináta menti mozgatás golyósorsók vagy lineáris motorok optikai mérőrendszer pneumatikus csapágyazás mérőfej mérőtapintók

4 A mechanikai rendszer különböző kialakításai oszlopos konzolos portál híd mérőrobot (karos) A mérőfejek és tapintók Kapcsoló típusú mérőfej Renishaw mérőfej: kapcsoló típusú a mérőtapintó helyzete nem fix, tetszőleges szögben, két síkban elforgatható Folyamatos érintkezésű mérőfej (mérőgép a mérőfejben)

5 Tapintó rendszerek Anyaguk: rubin Szerelt csillag tapintó Tapintók henger, kúp, tárcsa, gömb véggel 7.2 A koordináta mérés folyamata és lényege Mérés végrehajtása: manuális gépi (programozott)

6 Mérési pontok felvétele L = ( x z x1 ) + ( y2 y1) + ( z2 1) A pont megérintésének folyamata: A tapintó kalibrálása Ismert átmérőjű gömb bemérése Dinamikus tapitó rádiusz értelmezése A dinamikus sugár mindig kisebb a statikusnál

7 Kompenzáció D = D + 2r A kompenzáció iránya és előjele függ a mérendő felület jellegétől és irányától 7.3 Mérhető standard geometriai elemek síkbeli térbeli elemek Pontszerű elemek Vektorszerű elemek

8 Pontszerű elemek Váll; pont (x o, y o, z o ) Gömb(D,x o,y o,z o ) Kör (D, x o,y o,z o ) Furat Tengely Vektorszerű elemek Egyenes (irány) Sík (normál vektor) Kúp (tengely) Henger (tengely) Ellipszis (főtengely)
 Kúp (tengely) Henger (tengely)")
9 7.4 Műveletek mért elemek között, geometriai függvények távolság metszés középpont vetítés párhuzamosság merőlegesség bezárt szög elemek mérése tárolás műveletek eltárolt elemek között Középpont: pontszerű elemek között Távolság: pont - pontszerű elem, egyenes, sík Vetítés: pontot, egyenest, kört - síkra

10 Metszés: mért geometriai elemek közöttt között Merőlegesség Párhuzamosság Szöghelyzet

11 Leggyakoribb tűrések és helyzettűrések értelmezése Szimbolikus jelölés Értelmezés Példa Egyenesség Szimbolikus jelölés Értelmezés Példa Síklapúság Szimbolikus jelölés Értelmezés Példa Körkörösség Szimbolikus jelölés Értelmezés Példa Hengeresség Szimbolikus jelölés Értelmezés Példa Kúposság

12 Szimbolikus jelölés Értelmezés Példa Szimbolikus jelölés Értelmezés Példa Párhuzamosság Szimbolikus jelölés Értelmezés Példa Bázis Szimbolikus jelölés Értelmezés Példa Szimbolikus jelölés Értelmezés Példa Merőlegesség Szimbolikus jelölés Értelmezés Példa Bázis

13 Szimbolikus jelölés Értelmezés Bázis Szimbolikus jelölés Értelmezés Példa Szögeltérés Bázis Szimbolikus jelölés Értelmezés Példa A mérések végezhetők: derékszögű henger gömbi Koordináta rendszerben 7.5 Koordináta rendszerek A választott koordináta rendszer meghatározza a geometriai elem tűrésezését is - ill. ez fordítva is igaz

14 Mérés közben három különböző ponthoz kötött koordináta rendszerben dolgozhatunk: gépi normál (munkadarabhoz kötött) kiegészítő (munkadarabhoz kötött) A gépi koordináta rendszert kivéve valamennyi szabadon áthelyezhető a mérés során. Irányuk és nullpontjuk változtatható. A munkadarabhoz rendelt koordináta rendszerek felvételének folyamata: vektorszerű elem megmérése koordináta irány azonossá tétele az adott vektorral az előbbi megismétlése valamely másik koordináta irányban A harmadik koordináta tengely kiadódik Nullpont felvétel vagy eltolás: Pontszerű sajátossággal rendelkező elem mérése megfelelő koordináta irányokban történő nullázás

15 A munkadarabhoz rendelt koordináta rendszerek felvételének folyamata: 7.6 Bonyolult geometriájú (nem standard) felületek ellenőrzése a tényleges érintkezési pontnak nincs köze a koordináta irányokhoz csak programozott módban lehetséges a tapintót az elméleti felületi normális irányába kell elindítani méréskor az elméleti célpont irányába A rendszer válaszjelet vár, érintési pontra mindig szükség van!

16 Bonyolult felületek mérése Az elméleti normális esetében is a PP távolság minden esetben mint mérési hiba jelentkezik Matematikailag nem felírható felületek esetén különböző letapogatási stratégiákat alkalmaznak. Sík és térbeli letapogatás (digitalizálás) Síkbeli: a görbült felölet közelítése körökkel: Térbeli: metszetekre bontás Felület közelítése elemi háromszögekkel: képzetes mérési pontok!
 Síkbeli: a görbült felölet közelítése körökkel:")
17 7.7 Alkatrészprogram készítésének lehetőségei Alkatrészprogram: a tapintó középpontjának vezérlése: Pozícionálás: célpont megadása, mozgatás Mérés. Célpont, megközelítési irány és mérési sebesség megadása mozgás addig, míg az érintkezés be nem következik a mért érték (gömb középpon) tárolása A programkészítés módjai: Öntanuló üzemmód: a kézzel (joystick) végrehajtott műveleteket a rendszer felírja egy file-ba, mely kisebb módosítások után alkatrészprogrammá alakítható át Alkatrészprogram írása szövegszerkesztőben CAD kapcsolat, interaktív kiegészítésekkel 7.8 A koordináta méréstechnika jellegzetességei Új filozófiát hoz a geometriai mérések területén Bonyolult mérések könnyen elvégezhetők Hagyományos módszerekkel nem mérhető geometriák is ellenőrizhetők Feltáratlan felületek digitalizálhatók A megmért elemek között műveletek értelmezhetők Elfogadhatóan nagy pontosság és reprodukálhatóság Szubjektív hibák csökkentése Automatizált a rendszer eredményei visszacsatolhatók Egyszerű elemek esetén lassúbb a hagyományos módszereknél Szakképzett munkaerőt igényel Drága

18 7.9 Fogazott elemek mérése (esettanulmány)

19
20

21
Szerszámgépek, méretellenőrzés CNC szerszámgépen
 Mérés CNC szerszámgépen Szerszámgépek, méretellenőrzés CNC szerszámgépen Dr. Markos Sándor BME GTT, SZMSZ Geometriai mérés CNC szerszámgépen? Nagy méretű munkadarabok. Szerszámbefogási hibák Szerszámgépmérés
Mérés CNC szerszámgépen Szerszámgépek, méretellenőrzés CNC szerszámgépen Dr. Markos Sándor BME GTT, SZMSZ Geometriai mérés CNC szerszámgépen? Nagy méretű munkadarabok. Szerszámbefogási hibák Szerszámgépmérés
Nemzeti Akkreditáló Testület. RÉSZLETEZŐ OKIRAT a NAT-2-0317/2014 nyilvántartási számú akkreditált státuszhoz
 Nemzeti Akkreditáló Testület RÉSZLETEZŐ OKIRAT a NAT-2-0317/2014 nyilvántartási számú akkreditált státuszhoz A Kalibra Dimension Kft. Kalibráló laboratórium (2151 Fót, Béke utca 72.) akkreditált területe
Nemzeti Akkreditáló Testület RÉSZLETEZŐ OKIRAT a NAT-2-0317/2014 nyilvántartási számú akkreditált státuszhoz A Kalibra Dimension Kft. Kalibráló laboratórium (2151 Fót, Béke utca 72.) akkreditált területe
RÉSZLETEZŐ OKIRAT (2) a NAH / nyilvántartási számú akkreditált státuszhoz
 a NAH / nyilvántartási számú akkreditált státuszhoz") RÉSZLETEZŐ OKIRAT (2) a NAH-2-0317/2014 1 nyilvántartási számú akkreditált státuszhoz 1) Az akkreditált szervezet neve és címe: Kalibra Dimension Kft. Kalibráló laboratórium 2151 Fót, Béke utca 72. 2)
RÉSZLETEZŐ OKIRAT (2) a NAH-2-0317/2014 1 nyilvántartási számú akkreditált státuszhoz 1) Az akkreditált szervezet neve és címe: Kalibra Dimension Kft. Kalibráló laboratórium 2151 Fót, Béke utca 72. 2)
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Geometria III.
 Geometria III.") Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
International GTE Conference MANUFACTURING 2012. 14-16 November, 2012 Budapest, Hungary. Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
 International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5
 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5") KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait:
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (ESZTERGÁLÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait:
5. Az NC programozás alapjai. Az NC technika fejlődése
 5. Az NC programozás alapjai Az NC (Numerical Control) az automatizálás egyik specifikus formája A vezérlés a parancsokat az alkatrészprogramból ismeri Az alkatrészprogram alfanumerikus karakterekből áll
5. Az NC programozás alapjai Az NC (Numerical Control) az automatizálás egyik specifikus formája A vezérlés a parancsokat az alkatrészprogramból ismeri Az alkatrészprogram alfanumerikus karakterekből áll
= Y y 0. = Z z 0. u 1. = Z z 1 z 2 z 1. = Y y 1 y 2 y 1
 Egyenes és sík a térben Elméleti áttekintés Az egyenes paraméteres egyenlete: X = u 1 λ + x 0 Y = u λ + y 0, Z = u λ + z 0 ahol a λ egy valós paraméter Az u = (u 1, u, u ) az egyenes irányvektora és P
Egyenes és sík a térben Elméleti áttekintés Az egyenes paraméteres egyenlete: X = u 1 λ + x 0 Y = u λ + y 0, Z = u λ + z 0 ahol a λ egy valós paraméter Az u = (u 1, u, u ) az egyenes irányvektora és P
Nemzeti Akkreditáló Hatóság. RÉSZLETEZŐ OKIRAT a NAH /2016 nyilvántartási számú akkreditált státuszhoz
 Nemzeti Akkreditáló Hatóság RÉSZLETEZŐ OKIRAT a NAH-2-0124/2016 nyilvántartási számú akkreditált státuszhoz A TRIGO PRECÍZIÓS MÉRÉSTECHNIKA Kft. Kalibrálólaboratórium (1102 Budapest, Szent László tér 20.
Nemzeti Akkreditáló Hatóság RÉSZLETEZŐ OKIRAT a NAH-2-0124/2016 nyilvántartási számú akkreditált státuszhoz A TRIGO PRECÍZIÓS MÉRÉSTECHNIKA Kft. Kalibrálólaboratórium (1102 Budapest, Szent László tér 20.
Egybevágósági transzformációk. A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá.
 Egybevágósági transzformációk A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá. Egybevágósági transzformációk azok a geometriai transzformációk, amelyeknél bármely
Egybevágósági transzformációk A geometriai transzformációk olyan függvények, amelyek ponthoz pontot rendelnek hozzá. Egybevágósági transzformációk azok a geometriai transzformációk, amelyeknél bármely
10. Az NC programozás alapjai. Az NC technika fejlődése. Az NC technika rugalmas automatizált. nagy termelékenység
 10. Az NC programozás alapjai Az NC (Numerical lcontrol) az automatizálás ti egyik specifikus formája A vezérlés a parancsokat az alkatrészprogramból ismeri Az alkatrészprogram alfanumerikus karakterekből
10. Az NC programozás alapjai Az NC (Numerical lcontrol) az automatizálás ti egyik specifikus formája A vezérlés a parancsokat az alkatrészprogramból ismeri Az alkatrészprogram alfanumerikus karakterekből
Egy sík és a koordinátasíkok metszésvonalainak meghatározása
 1 Egy sík és a koordinátasíkok metszésvonalainak meghatározása Ehhez tekintsük az 1. ábrát! 1. ábra Itt az ( u, v, w ) tengelymetszeteivel adott S síkot látjuk, az Oxyz térbeli derékszögű koordináta -
1 Egy sík és a koordinátasíkok metszésvonalainak meghatározása Ehhez tekintsük az 1. ábrát! 1. ábra Itt az ( u, v, w ) tengelymetszeteivel adott S síkot látjuk, az Oxyz térbeli derékszögű koordináta -
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5
 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5") KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait: a)
KÉRDÉSEK PROGRAMOZÁSBÓL_TKU (MARÁS) 1. Írd le а CNC megmunkáló rendszerek jellemző pontjainak neveit: a) М 0,5 b) А 0,5 c) W 0,5 d) R 0,5 2. Rajzold le a CNC megmunkáló rendszerek jellemző pontjait: a)
Mechatronika segédlet 3. gyakorlat
 Mechatronika segédlet 3. gyakorlat 2017. február 20. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Fogaskerék... 2 Nézetváltás 3D modellezéshez... 2 Könnyítés megvalósítása... 2 A fogaskerék
Mechatronika segédlet 3. gyakorlat 2017. február 20. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Fogaskerék... 2 Nézetváltás 3D modellezéshez... 2 Könnyítés megvalósítása... 2 A fogaskerék
Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D
 Vetítések Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D Vetítések fajtái - 1 perspektívikus A párhuzamos A A' B A' B A vetítés középpontja B' Vetítési
Vetítések Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D Vetítések fajtái - 1 perspektívikus A párhuzamos A A' B A' B A vetítés középpontja B' Vetítési
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
17. előadás: Vektorok a térben
 17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
VisualNastran4D. kinematikai vizsgálata, szimuláció
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
Az egyenes és a sík analitikus geometriája
 Az egyenes és a sík analitikus geometriája Az egyenes a kétdimenziós koordinátarendszerben A kétdimenziós koordinátarendszerben az egyenest egy n(a, B) normálvektorával és egy r 0 helyvektorú P(x 0,y 0
Az egyenes és a sík analitikus geometriája Az egyenes a kétdimenziós koordinátarendszerben A kétdimenziós koordinátarendszerben az egyenest egy n(a, B) normálvektorával és egy r 0 helyvektorú P(x 0,y 0
Pozicionáló rendszerek Lineáris tengelyek KK sorozat
 3. 3.. KK lineáris modulok tulajdonságai HIWIN KK lineáris modulok kompakt pozicionáló tengelyek. z előtolást egy golyós menetes orsós hajtás biztosítja, amely a motor kész meghajtó-karimába kerül tárolásra.
3. 3.. KK lineáris modulok tulajdonságai HIWIN KK lineáris modulok kompakt pozicionáló tengelyek. z előtolást egy golyós menetes orsós hajtás biztosítja, amely a motor kész meghajtó-karimába kerül tárolásra.
Tűrések. 12. előadás
 Tűrések 12. előadás A kész munkadarabok többé-kevésbé eltérnek a rajzon ábrázolt munkadaraboktól Az eltérés háromféle lehet: méreteltérés alakeltérés helyzeteltérés Tűrésmező Széchenyi Tűrésmező A körülmények
Tűrések 12. előadás A kész munkadarabok többé-kevésbé eltérnek a rajzon ábrázolt munkadaraboktól Az eltérés háromféle lehet: méreteltérés alakeltérés helyzeteltérés Tűrésmező Széchenyi Tűrésmező A körülmények
Érettségi feladatok Koordinátageometria_rendszerezve / 5
 Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek
 16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek EGYBEVÁGÓSÁGI TRANSZFORMÁCIÓK Geometriai transzformáció Def:Olyan speciális függvény, melynek értelmezési
16. tétel Egybevágósági transzformációk. Konvex sokszögek tulajdonságai, szimmetrikus sokszögek EGYBEVÁGÓSÁGI TRANSZFORMÁCIÓK Geometriai transzformáció Def:Olyan speciális függvény, melynek értelmezési
06A Furatok megmunkálása
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Gyártástechnológia II. BAGGT23NND/NLD 06A Furatok megmunkálása Dr. Mikó Balázs [email protected]
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Gyártástechnológia II. BAGGT23NND/NLD 06A Furatok megmunkálása Dr. Mikó Balázs [email protected]
Legnagyobb anyagterjedelem feltétele
 Legnagyobb anyagterjedelem feltétele 1. Legnagyobb anyagterjedelem feltétele A legnagyobb anyagterjedelem feltétele (szabványban ilyen néven szerepel) vagy más néven a legnagyobb anyagterjedelem elve illesztett
Legnagyobb anyagterjedelem feltétele 1. Legnagyobb anyagterjedelem feltétele A legnagyobb anyagterjedelem feltétele (szabványban ilyen néven szerepel) vagy más néven a legnagyobb anyagterjedelem elve illesztett
Bevezetés az elméleti zikába
 Bevezetés az elméleti zikába egyetemi jegyzet Kúpszeletek Lázár Zsolt, Lázár József Babe³Bolyai Tudományegyetem Fizika Kar 2011 TARTALOMJEGYZÉK 6 TARTALOMJEGYZÉK Azokat a görbéket, amelyeknek egyenlete
Bevezetés az elméleti zikába egyetemi jegyzet Kúpszeletek Lázár Zsolt, Lázár József Babe³Bolyai Tudományegyetem Fizika Kar 2011 TARTALOMJEGYZÉK 6 TARTALOMJEGYZÉK Azokat a görbéket, amelyeknek egyenlete
Lemezalkatrész modellezés. SolidEdge. alkatrészen
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A5 alap közepes - haladó SolidEdge CAD 3D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A5 alap közepes - haladó SolidEdge CAD 3D
Piri Dávid. Mérőállomás célkövető üzemmódjának pontossági vizsgálata
 Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Termék modell. Definíció:
 Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Mérési hibák 2006.10.04. 1
 Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
Mérési hibák 2006.10.04. 1 Mérés jel- és rendszerelméleti modellje Mérési hibák_labor/2 Mérési hibák mérési hiba: a meghatározandó értékre a mérés során kapott eredmény és ideális értéke közötti különbség
06a Furatok megmunkálása
 Y Forgácsolástechnológia alapjai 06a Furatok megmunkálása r. ikó Balázs [email protected] r. ikó B. 1 épipari alkatrészek geometriája Y r. ikó B. 2 1 Y Belső hengeres felületek Követelmények:
Y Forgácsolástechnológia alapjai 06a Furatok megmunkálása r. ikó Balázs [email protected] r. ikó B. 1 épipari alkatrészek geometriája Y r. ikó B. 2 1 Y Belső hengeres felületek Követelmények:
Érettségi feladatok: Koordináta-geometria 1/5
 Érettségi feladatok: Koordináta-geometria 1/5 2003. Próba/ 13. Adott egy háromszög három csúcspontja a koordinátáival: A( 4; 4), B(4; 4) és C( 4; 8). Számítsa ki a C csúcsból induló súlyvonal és az A csúcsból
Érettségi feladatok: Koordináta-geometria 1/5 2003. Próba/ 13. Adott egy háromszög három csúcspontja a koordinátáival: A( 4; 4), B(4; 4) és C( 4; 8). Számítsa ki a C csúcsból induló súlyvonal és az A csúcsból
AKCIÓ. TESA új generációs magasságmérő gépek. 1D magasságmérők 2D magasságmérők
 TESA új generációs magasságmérő gépek A TESA a magasságmérők tekintetében különböző modelleket fejlesztett ki, melyeket más-más ellenőrzési folyamatra alkalmazhatunk a gyártás során akár közvetlenül a
TESA új generációs magasságmérő gépek A TESA a magasságmérők tekintetében különböző modelleket fejlesztett ki, melyeket más-más ellenőrzési folyamatra alkalmazhatunk a gyártás során akár közvetlenül a
2014/2015. tavaszi félév
 Hajder L. és Valasek G. [email protected] Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. [email protected] Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder Levente 2017/2018. II. félév
 Hajder Levente [email protected] Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente [email protected] Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
JÁRMŰVEK JAVÍTÁSA. Javítási technológiák
 JÁRMŰVEK JAVÍTÁSA Javítási technológiák Javítás A javítás feladata az üzemképesség, az előírt megbízhatósági szint helyreállítása. javításkor részleges vagy teljes szétszerelés és alapos tisztítása után
JÁRMŰVEK JAVÍTÁSA Javítási technológiák Javítás A javítás feladata az üzemképesség, az előírt megbízhatósági szint helyreállítása. javításkor részleges vagy teljes szétszerelés és alapos tisztítása után
Matematika. 9.osztály: Ajánlott tankönyv és feladatgyűjtemény: Matematika I-II. kötet (Apáczai Kiadó; AP-090803 és AP-090804)
") Matematika A definíciókat és tételeket (bizonyítás nélkül) ki kell mondani, a tananyagrészekhez tartozó alap- és közepes nehézségű feladatokat kell tudni megoldani A javítóvizsga 60 -es írásbeliből áll.
Matematika A definíciókat és tételeket (bizonyítás nélkül) ki kell mondani, a tananyagrészekhez tartozó alap- és közepes nehézségű feladatokat kell tudni megoldani A javítóvizsga 60 -es írásbeliből áll.
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
(Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.
 Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.") Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
I. TŰRÉS. A munkadarabok előírt méreteit, szögeit, alakját, és méreteik egymáshoz viszonyított helyzetét a gyakorlatban nem tudjuk kivitelezni.
 Tűrés és Illesztés I. TŰRÉS A munkadarabok előírt méreteit, szögeit, alakját, és méreteik egymáshoz viszonyított helyzetét a gyakorlatban nem tudjuk kivitelezni. Ha nem tudjuk ezt elérni, akkor nem is
Tűrés és Illesztés I. TŰRÉS A munkadarabok előírt méreteit, szögeit, alakját, és méreteik egymáshoz viszonyított helyzetét a gyakorlatban nem tudjuk kivitelezni. Ha nem tudjuk ezt elérni, akkor nem is
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
Geometriai alapok Felületek
 Geometriai alapok Felületek Geometriai alapok Felületek matematikai definíciója A háromdimenziós tér egy altere Függvénnyel rögzítjük a pontok helyét Parabolavezérgörbéjű donga 4 f z x + a C Elliptikus
Geometriai alapok Felületek Geometriai alapok Felületek matematikai definíciója A háromdimenziós tér egy altere Függvénnyel rögzítjük a pontok helyét Parabolavezérgörbéjű donga 4 f z x + a C Elliptikus
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
A mérés problémája a pedagógiában. Dr. Nyéki Lajos 2015
 A mérés problémája a pedagógiában Dr. Nyéki Lajos 2015 A mérés fogalma Mérésen olyan tevékenységet értünk, amelynek eredményeként a vizsgált jelenség számszerűen jellemezhetővé, más hasonló jelenségekkel
A mérés problémája a pedagógiában Dr. Nyéki Lajos 2015 A mérés fogalma Mérésen olyan tevékenységet értünk, amelynek eredményeként a vizsgált jelenség számszerűen jellemezhetővé, más hasonló jelenségekkel
SPECIÁLIS HELYI TANTERV SZAKKÖZÉPISKOLA. matematika
 SPECIÁLIS HELYI TANTERV SZAKKÖZÉPISKOLA matematika 9. évfolyam 1. Számtan, algebra 15 óra 2. Gondolkodási módszerek, halmazok, kombinatorika, valószínűség, statisztika 27 óra 3. Függvények, sorozatok,
SPECIÁLIS HELYI TANTERV SZAKKÖZÉPISKOLA matematika 9. évfolyam 1. Számtan, algebra 15 óra 2. Gondolkodási módszerek, halmazok, kombinatorika, valószínűség, statisztika 27 óra 3. Függvények, sorozatok,
Regresszió számítás. Tartalomjegyzék: GeoEasy V2.05+ Geodéziai Kommunikációs Program
 Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
2007. 3D méréstechnika
 2007. 3D méréstechnika Az elmúlt évek Cégünk 12 éve mőködik eredményesen a modern ipari méréstechnika területén. A laboratórium Akkreditált hosszmérı, kalibráló laboratóriumunkat elsıként hoztuk létre
2007. 3D méréstechnika Az elmúlt évek Cégünk 12 éve mőködik eredményesen a modern ipari méréstechnika területén. A laboratórium Akkreditált hosszmérı, kalibráló laboratóriumunkat elsıként hoztuk létre
Tehetetlenségi nyomatékok
 Tehetetlenségi nyomtékok 1 Htározzuk meg z m tömegű l hosszúságú homogén rúd tehetetlenségi nyomtékát rúd trtóegyenesét metsző tetszőleges egyenesre vontkozón, h rúd és z egyenes hjlásszöge α, rúd középpontjánk
Tehetetlenségi nyomtékok 1 Htározzuk meg z m tömegű l hosszúságú homogén rúd tehetetlenségi nyomtékát rúd trtóegyenesét metsző tetszőleges egyenesre vontkozón, h rúd és z egyenes hjlásszöge α, rúd középpontjánk
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA
 FIATAL ŰSZAKIAK TUDOÁNYOS ÜLÉSSZAKA Kolozsvár, 2004. március 26-27. ÍVLT PROFILÚ CSIGA ÉRÉS 3D GÉPN Dr. Bányai Károly, Szabó Péter, Szentesi Attila Abstract: The paper contains the development of 3D-coordinate
FIATAL ŰSZAKIAK TUDOÁNYOS ÜLÉSSZAKA Kolozsvár, 2004. március 26-27. ÍVLT PROFILÚ CSIGA ÉRÉS 3D GÉPN Dr. Bányai Károly, Szabó Péter, Szentesi Attila Abstract: The paper contains the development of 3D-coordinate
Tanmenetjavaslat. Téma Óraszám Tananyag Fogalmak Összefüggések Eszközök Kitekintés. Helyi érték, alaki érték. Számegyenes.
 Heti 4 óra esetén, 37 tanítási hétre összesen 148 óra áll rendelkezésre. A tanmenet 132 óra beosztását tartalmazza. Heti 5 óra esetén összesen 37-tel több órában dolgozhatunk. Ez összesen 185 óra. Itt
Heti 4 óra esetén, 37 tanítási hétre összesen 148 óra áll rendelkezésre. A tanmenet 132 óra beosztását tartalmazza. Heti 5 óra esetén összesen 37-tel több órában dolgozhatunk. Ez összesen 185 óra. Itt
2011. tavaszi félév. Élgeometria. Dr. Ozsváth Péter Dr. Szmejkál Attila
 2011. tavaszi félév Élgeometria Dr. Ozsváth Péter Dr. Szmejkál Attila Budapesti Műszaki és Gazdaságtudományi Egyetem, Járműgyártás és javítás Tanszék, 1111, Budapest, Bertalan L. u. 2. Z 608., tel./fax:
2011. tavaszi félév Élgeometria Dr. Ozsváth Péter Dr. Szmejkál Attila Budapesti Műszaki és Gazdaságtudományi Egyetem, Járműgyártás és javítás Tanszék, 1111, Budapest, Bertalan L. u. 2. Z 608., tel./fax:
Optika gyakorlat 2. Geometriai optika: planparalel lemez, prizma, hullámvezető
 Optika gyakorlat. Geometriai optika: planparalel lemez, prizma, hullámvezető. példa: Fényterjedés planparalel lemezen keresztül A plánparalel lemezen történő fényterjedés hatására a fénysugár újta távolsággal
Optika gyakorlat. Geometriai optika: planparalel lemez, prizma, hullámvezető. példa: Fényterjedés planparalel lemezen keresztül A plánparalel lemezen történő fényterjedés hatására a fénysugár újta távolsággal
Renishaw rögzítőelemek A méréstechnikai rögzítőelemek első számú szállítója
 H-1000-0089-02-A Renishaw rögzítőelemek A méréstechnikai rögzítőelemek első számú szállítója Rögzítőelemek CMM-hez Rögzítőelemek optikai méréskhez Equator rögzítőelemek Testreszabott rögzítőelem megoldások
H-1000-0089-02-A Renishaw rögzítőelemek A méréstechnikai rögzítőelemek első számú szállítója Rögzítőelemek CMM-hez Rögzítőelemek optikai méréskhez Equator rögzítőelemek Testreszabott rögzítőelem megoldások
MÉRÉSTECHNIKA 4. ELŐADÁS. Galla Jánosné 2014
 MÉRÉSTECHNIKA 4. ELŐADÁS 1 Galla Jánosné 2014 Minőség Mérethűség Alakhűség Helyzetpontosság Felületminőség Felületi mikrogeometria Felületi réteg állapota Érdesség Hullámosság Vegyi összetétel Szövetszerkezet
MÉRÉSTECHNIKA 4. ELŐADÁS 1 Galla Jánosné 2014 Minőség Mérethűség Alakhűség Helyzetpontosság Felületminőség Felületi mikrogeometria Felületi réteg állapota Érdesség Hullámosság Vegyi összetétel Szövetszerkezet
Az ipari komputer tomográfia vizsgálati lehetőségei
 Az ipari komputer tomográfia vizsgálati lehetőségei Dr. Czinege Imre, Kozma István Széchenyi István Egyetem 6. ANYAGVIZSGÁLAT A GYAKORLATBAN KONFERENCIA Cegléd, 2012. június 7-8. Tartalom A CT technika
Az ipari komputer tomográfia vizsgálati lehetőségei Dr. Czinege Imre, Kozma István Széchenyi István Egyetem 6. ANYAGVIZSGÁLAT A GYAKORLATBAN KONFERENCIA Cegléd, 2012. június 7-8. Tartalom A CT technika
Lemezalkatrész modellezés. SolidEdge. alkatrészen
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A2 alap közepes - haladó SolidEdge CAD 3D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A2 alap közepes - haladó SolidEdge CAD 3D
1. Olvassuk be két pont koordinátáit: (x1, y1) és (x2, y2). Határozzuk meg a két pont távolságát és nyomtassuk ki.
 és (x2, y2). Határozzuk meg a két pont távolságát és nyomtassuk ki.") Számítás:. Olvassuk be két pont koordinátáit: (, y) és (2, y2). Határozzuk meg a két pont távolságát és nyomtassuk ki. 2. Olvassuk be két darab két dimenziós vektor komponenseit: (a, ay) és (b, by). Határozzuk
Számítás:. Olvassuk be két pont koordinátáit: (, y) és (2, y2). Határozzuk meg a két pont távolságát és nyomtassuk ki. 2. Olvassuk be két darab két dimenziós vektor komponenseit: (a, ay) és (b, by). Határozzuk
Mikrométerek Tolómérők Mélységmérők Mérőórák Belső mikrométerek Mérőhasábok Sztereo mikroszkópok Mérőmikroszkópok Profil projektorok
 Mikrométerek Tolómérők Mélységmérők Mérőórák Belső mikrométerek Mérőhasábok Sztereo mikroszkópok Mérőmikroszkópok Profil projektorok ELLENŐRZÖTT NÉMET MINŐSÉG Mikrométerek Felbontás: digitális 0.001 mm,
Mikrométerek Tolómérők Mélységmérők Mérőórák Belső mikrométerek Mérőhasábok Sztereo mikroszkópok Mérőmikroszkópok Profil projektorok ELLENŐRZÖTT NÉMET MINŐSÉG Mikrométerek Felbontás: digitális 0.001 mm,
Optika gyakorlat 1. Fermat-elv, fénytörés, reexió sík és görbült határfelületen. Fermat-elv
 Optika gyakorlat 1. Fermat-elv, fénytörés, reexió sík és görbült határfelületen Kivonat Geometriai optika: közelítés, amely a fényterjedést, közeghatáron való áthaladást geometriai alakzatok görbék segítségével
Optika gyakorlat 1. Fermat-elv, fénytörés, reexió sík és görbült határfelületen Kivonat Geometriai optika: közelítés, amely a fényterjedést, közeghatáron való áthaladást geometriai alakzatok görbék segítségével
MÉRÉSTECHNIKA. BME Energetikai Gépek és Rendszerek Tanszék Fazekas Miklós (1) márc. 1
 márc. 1") MÉRÉSTECHNIKA BME Energetikai Gépek és Rendszerek Tanszék Fazekas Miklós (1) 463 26 14 16 márc. 1 Méréstechnikai alapfogalmak CÉL Mennyiségek mérése Fizikai mennyiség Hosszúság L = 2 m Mennyiségi minőségi
MÉRÉSTECHNIKA BME Energetikai Gépek és Rendszerek Tanszék Fazekas Miklós (1) 463 26 14 16 márc. 1 Méréstechnikai alapfogalmak CÉL Mennyiségek mérése Fizikai mennyiség Hosszúság L = 2 m Mennyiségi minőségi
Tolómérők, mikrométerek
 Tolómérők, mikrométerek Mérőeszköz készlet tárolódobozban F2 00 F2 00 - Négy részes. - Analóg. 2 11 Tartalom Szerszám Tolómérő Mikrométer Derékszög Vonalzó x 0,0 0-2 x x 0 x 1 x 0, Kengyeles mikrométer
Tolómérők, mikrométerek Mérőeszköz készlet tárolódobozban F2 00 F2 00 - Négy részes. - Analóg. 2 11 Tartalom Szerszám Tolómérő Mikrométer Derékszög Vonalzó x 0,0 0-2 x x 0 x 1 x 0, Kengyeles mikrométer
A térképen ábrázolt vonal: - sík felület egyenese? - sík felület görbéje? - görbült felület egyenese ( geodetikus )? - görbült felület görbéje?
? - görbült felület görbéje?") Előzetes megjegyzés: 1. Az időt nyugodtan mérhetjük méterben. ct [s ] = t [m ] A film kétórás volt. = A film 2.16 milliárd kilométernyi ideig tartott. 2. A tömeget is nyugodtan mérhetjük méterben! GM [kg]
Előzetes megjegyzés: 1. Az időt nyugodtan mérhetjük méterben. ct [s ] = t [m ] A film kétórás volt. = A film 2.16 milliárd kilométernyi ideig tartott. 2. A tömeget is nyugodtan mérhetjük méterben! GM [kg]
A térképen ábrázolt vonal: - sík felület egyenese? - sík felület görbéje? - görbült felület egyenese ( geodetikus )? - görbült felület görbéje?
? - görbült felület görbéje?") Előzetes megjegyzés: 1. Az időt nyugodtan mérhetjük méterben. ct [s ] = t [m ] A film kétórás volt. = A film 2.16 milliárd kilométernyi ideig tartott. 2. A tömeget is nyugodtan mérhetjük méterben! GM [kg]
Előzetes megjegyzés: 1. Az időt nyugodtan mérhetjük méterben. ct [s ] = t [m ] A film kétórás volt. = A film 2.16 milliárd kilométernyi ideig tartott. 2. A tömeget is nyugodtan mérhetjük méterben! GM [kg]
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
EÖTVÖS LORÁND SZAKKÖZÉP- ÉS SZAKISKOLA TANÍTÁST SEGÍTŐ OKTATÁSI ANYAGOK MÉRÉS TANTÁRGY
 EÖTVÖS LORÁND SZAKKÖZÉP- ÉS SZAKISKOLA TANÍTÁST SEGÍTŐ OKTATÁSI ANYAGOK MÉRÉS TANTÁRGY SÍKIDOMOK Síkidom 1 síkidom az a térelem, amelynek valamennyi pontja ugyan abban a síkban helyezkedik el. A síkidomokat
EÖTVÖS LORÁND SZAKKÖZÉP- ÉS SZAKISKOLA TANÍTÁST SEGÍTŐ OKTATÁSI ANYAGOK MÉRÉS TANTÁRGY SÍKIDOMOK Síkidom 1 síkidom az a térelem, amelynek valamennyi pontja ugyan abban a síkban helyezkedik el. A síkidomokat
Keménymarás és/vagy szikraforgácsolás. Dr. Markos Sándor, Szerszámgyártók Magyarországi Szövetsége
 Keménymarás és/vagy szikraforgácsolás Gyártástechnológiai trendek Nagy sebességű megmunkálások alkalmazásának fejlődése Lineár motoros hajtások alkalmazásának bővülése Párhuzamos kinematika alkalmazása
Keménymarás és/vagy szikraforgácsolás Gyártástechnológiai trendek Nagy sebességű megmunkálások alkalmazásának fejlődése Lineár motoros hajtások alkalmazásának bővülése Párhuzamos kinematika alkalmazása
Automatikus szerszámbemérés. Szerszámbemérő program TS27R illetve TT140 tapintóhoz
 Automatikus szerszámbemérés Szerszámbemérő program TS27R illetve TT140 tapintóhoz Copyright NCT 2009 E leírás tartalmára minden kiadói jog fenntartva. Utánnyomáshoz kivonatosan is engedélyünk megszerzése
Automatikus szerszámbemérés Szerszámbemérő program TS27R illetve TT140 tapintóhoz Copyright NCT 2009 E leírás tartalmára minden kiadói jog fenntartva. Utánnyomáshoz kivonatosan is engedélyünk megszerzése
Méretlánc átrendezés a gyakorlatban
 Méretlánc átrendezés a gyakorlatban 1. Méretlánc átrendezésének okai Méretlánc átrendezésével csak akkor foglalkozunk, ha szükséges, ezek az esetek általában a következők: Koordináta rendszerhez igazodó
Méretlánc átrendezés a gyakorlatban 1. Méretlánc átrendezésének okai Méretlánc átrendezésével csak akkor foglalkozunk, ha szükséges, ezek az esetek általában a következők: Koordináta rendszerhez igazodó
Koordináta-geometria alapozó feladatok
 Koordináta-geometria alapozó feladatok 1. Határozd meg az AB szakasz felezőpontját! (1,5 ; 3,5) (0,5 ; ) (6,5 ; 8,5) (4,5 ; ) (0,5 ; 1,5) (0 ; 0) (0 ; 8,5) (1 ; 1) ( 1,5 ; ) (3,5 ; 3) (0 ; 3) ( 1 ; 1,5).
Koordináta-geometria alapozó feladatok 1. Határozd meg az AB szakasz felezőpontját! (1,5 ; 3,5) (0,5 ; ) (6,5 ; 8,5) (4,5 ; ) (0,5 ; 1,5) (0 ; 0) (0 ; 8,5) (1 ; 1) ( 1,5 ; ) (3,5 ; 3) (0 ; 3) ( 1 ; 1,5).
11.5. Ellipszis és ellipszisív
 11. Geometriai elemek 907 11.5. Ellipszis és ellipszisív Egy ellipszist geometriailag a fókuszpontjaival, valamint a nagy- és kistengelyei hosszának és irányának megadásával, egy ellipszisívet pedig ugyanezekkel
11. Geometriai elemek 907 11.5. Ellipszis és ellipszisív Egy ellipszist geometriailag a fókuszpontjaival, valamint a nagy- és kistengelyei hosszának és irányának megadásával, egy ellipszisívet pedig ugyanezekkel
GÉPÉSZETI ALAPISMERETEK
 Gépészeti alapismeretek emelt szint 1511 ÉRETTSÉGI VIZSGA 2016. május 18. GÉPÉSZETI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ EMBERI ERŐFORRÁSOK MINISZTÉRIUMA Fontos
Gépészeti alapismeretek emelt szint 1511 ÉRETTSÉGI VIZSGA 2016. május 18. GÉPÉSZETI ALAPISMERETEK EMELT SZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ EMBERI ERŐFORRÁSOK MINISZTÉRIUMA Fontos
CNC technika. segédlet a CNC tantárgy oktatásához. Készítette: Paróczai János 2005.12.08
 CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
Versenyző kódja: 43 15/2008. (VIII. 13.) SZMM rendelet 54 521 01 0000 00 00-2013 MAGYAR KERESKEDELMI ÉS IPARKAMARA
 SZMM rendelet 54 521 01 0000 00 00-2013 MAGYAR KERESKEDELMI ÉS IPARKAMARA") 54 521 01 0000 00 00-2013 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 521 01 0000 00 00 SZVK rendelet száma: 15/2008. (VIII. 13.) SZMM
54 521 01 0000 00 00-2013 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 521 01 0000 00 00 SZVK rendelet száma: 15/2008. (VIII. 13.) SZMM
Gépipari minőségellenőrzés
 Gépipari minőségellenőrzés ek Gépészmérnök nappali képzésben részt vevők részére Összeállította: Dr. DrégelyiKiss Ágota Kis Ferenc Lektorálta: Galla Jánosné 0 Tartalomjegyzék. gyakorlat Furatok és menetek
Gépipari minőségellenőrzés ek Gépészmérnök nappali képzésben részt vevők részére Összeállította: Dr. DrégelyiKiss Ágota Kis Ferenc Lektorálta: Galla Jánosné 0 Tartalomjegyzék. gyakorlat Furatok és menetek
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Mechatronikai technikus szakma gyakorlati oktatásához OKJ száma: 54 523 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Foglalkozási napló a 20 /20. tanévre Mechatronikai technikus szakma gyakorlati oktatásához OKJ száma: 54 523 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Méréselmélet és mérőrendszerek 2. ELŐADÁS (1. RÉSZ)
") Méréselmélet és mérőrendszerek 2. ELŐADÁS (1. RÉSZ) KÉSZÍTETTE: DR. FÜVESI VIKTOR 2016. 10. Mai témáink o A hiba fogalma o Méréshatár és mérési tartomány M é r é s i h i b a o A hiba megadása o A hiba
Méréselmélet és mérőrendszerek 2. ELŐADÁS (1. RÉSZ) KÉSZÍTETTE: DR. FÜVESI VIKTOR 2016. 10. Mai témáink o A hiba fogalma o Méréshatár és mérési tartomány M é r é s i h i b a o A hiba megadása o A hiba
BEMUTATÓ TESA VISIO 500 HEXAGON METROLOGY
 BEMUTATÓ TESA VISIO 500 1 Bemutató ÚJ!!! Büszkeséggel mutatjuk be optikai mérőgép családunk új tagjait. TESA VISIO 500 Value TESA VISIO 500 Universal. PCDMIS Software-rel működnek 2 Bemutató ÚJ!!! Az érintés
BEMUTATÓ TESA VISIO 500 1 Bemutató ÚJ!!! Büszkeséggel mutatjuk be optikai mérőgép családunk új tagjait. TESA VISIO 500 Value TESA VISIO 500 Universal. PCDMIS Software-rel működnek 2 Bemutató ÚJ!!! Az érintés
SECURITRON 3D LASER SCANNING ÖNRE KALIBRÁLVA
 SECURITRON 3D LASER SCANNING ÖNRE KALIBRÁLVA A 3D lézerszkenner egy olyan kis méretű és súlyú (360g) optikai szkenner fej, amit bármilyen típusú 3D CMM Koordináta Mérőgépre könnyedén csatlakoztathatunk,
SECURITRON 3D LASER SCANNING ÖNRE KALIBRÁLVA A 3D lézerszkenner egy olyan kis méretű és súlyú (360g) optikai szkenner fej, amit bármilyen típusú 3D CMM Koordináta Mérőgépre könnyedén csatlakoztathatunk,
Parametrikus tervezés
 2012.03.31. Statikus modell Dinamikus modell Parametrikus tervezés Módosítások a tervezés folyamán Konstrukciós variánsok (termékcsaládok) Parametrikus Modell Parametrikus tervezés Paraméterek (változók
2012.03.31. Statikus modell Dinamikus modell Parametrikus tervezés Módosítások a tervezés folyamán Konstrukciós variánsok (termékcsaládok) Parametrikus Modell Parametrikus tervezés Paraméterek (változók
RS Nagypontosságú-hengerköszörű gépek
 RS Nagypontosságú-hengerköszörű gépek RS sorozat modul rendszerűen felépített nagypontosságú hengerköszörű gépek minden alkalmazási esetre 600 mm csúcstávolságtól 6000 mm csúcstávolságig B tengely- és
RS Nagypontosságú-hengerköszörű gépek RS sorozat modul rendszerűen felépített nagypontosságú hengerköszörű gépek minden alkalmazási esetre 600 mm csúcstávolságtól 6000 mm csúcstávolságig B tengely- és
Matematikai geodéziai számítások 10.
 Matematikai geodéziai számítások 10. Hibaellipszis, talpponti görbe és közepes ponthiba Dr. Bácsatyai, László Matematikai geodéziai számítások 10.: Hibaellipszis, talpponti görbe és Dr. Bácsatyai, László
Matematikai geodéziai számítások 10. Hibaellipszis, talpponti görbe és közepes ponthiba Dr. Bácsatyai, László Matematikai geodéziai számítások 10.: Hibaellipszis, talpponti görbe és Dr. Bácsatyai, László
Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel. Az objektumok áthaladnak a többi objektumon
 Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Használható segédeszköz: Függvénytáblázat, szöveges adatok tárolására és megjelenítésére nem alkalmas zsebszámológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus
Feladatok megoldásokkal a harmadik gyakorlathoz (érintési paraméterek, L Hospital szabály, elaszticitás) y = 1 + 2(x 1). y = 2x 1.
 y = 1 + 2(x 1). y = 2x 1.") Feladatok megoldásokkal a harmadik gyakorlathoz (érintési paraméterek, L Hospital szabály, elaszticitás). Feladat. Írjuk fel az f() = függvény 0 = pontbeli érintőjének egyenletét! Az érintő egyenlete y
Feladatok megoldásokkal a harmadik gyakorlathoz (érintési paraméterek, L Hospital szabály, elaszticitás). Feladat. Írjuk fel az f() = függvény 0 = pontbeli érintőjének egyenletét! Az érintő egyenlete y
Vektorok és koordinátageometria
 Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Transzformációk síkon, térben
 Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Minimum követelmények matematika tantárgyból 11. évfolyamon
 Minimum követelmények matematika tantárgyból. évfolyamon A hatványozás általánosítása pozitív alap esetén racionális kitevőre. Műveletek hatványokkal. A, a 0 függvény. Az eponenciális függvény. Vizsgálata
Minimum követelmények matematika tantárgyból. évfolyamon A hatványozás általánosítása pozitív alap esetén racionális kitevőre. Műveletek hatványokkal. A, a 0 függvény. Az eponenciális függvény. Vizsgálata
Forgácsolási folyamatok számítógépes tervezése I.
 Forgácsolási folyamatok számítógépes tervezése I. Az alkatrészprogram szintaktikája Program szám Mindig 4 karakter Program név Maximum 16 karakter NCT 2000T Dr. Mikó Balázs %O1234(programnév) N0005 (megjegyzés)
Forgácsolási folyamatok számítógépes tervezése I. Az alkatrészprogram szintaktikája Program szám Mindig 4 karakter Program név Maximum 16 karakter NCT 2000T Dr. Mikó Balázs %O1234(programnév) N0005 (megjegyzés)
Gépipari minőségellenőr Gépipari minőségellenőr
 A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/2007 (II. 27.) SzMM rendelettel módosított 1/2006 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
Gépipari minőségellenőr Gépipari minőségellenőr
 A 10/07 (II. 27.) SzMM rendelettel módosított 1/06 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
A 10/07 (II. 27.) SzMM rendelettel módosított 1/06 (II. 17.) OM rendelet Országos Képzési Jegyzékről és az Országos Képzési Jegyzékbe történő felvétel és törlés eljárási rendjéről alapján. Szakképesítés,
Házi feladat Dr Mikó Balázs - Gyártástechnológia II. 5
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Gyártástechnológia II. BAGGT23NND/NLD 01A - Bevezetés, Alapfogalmak Dr. Mikó Balázs [email protected]
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Gyártástechnológia II. BAGGT23NND/NLD 01A - Bevezetés, Alapfogalmak Dr. Mikó Balázs [email protected]
20/1996. (III. 28.) IKM rendelet
 IKM rendelet") 20/1996. (III. 28.) IKM rendelet az ipari és kereskedelmi szakképesítések szakmai és vizsgakövetelményeiről szóló 18/1995. (VI. 6.) IKM rendelet módosításáról A szakképzésről szóló 1993. évi LXXVI. törvény
20/1996. (III. 28.) IKM rendelet az ipari és kereskedelmi szakképesítések szakmai és vizsgakövetelményeiről szóló 18/1995. (VI. 6.) IKM rendelet módosításáról A szakképzésről szóló 1993. évi LXXVI. törvény
A lengőfűrészelésről
 A lengőfűrészelésről Az [ 1 ] tankönyvben ezt írják a lengőfűrészről, működéséről, használatáról: A lengőfűrész árkolásra, csaprések készítésére alkalmazott, 150 00 mm átmérőjű, 3 4 mm vastag, sűrű fogazású
A lengőfűrészelésről Az [ 1 ] tankönyvben ezt írják a lengőfűrészről, működéséről, használatáról: A lengőfűrész árkolásra, csaprések készítésére alkalmazott, 150 00 mm átmérőjű, 3 4 mm vastag, sűrű fogazású
MATEMATIKA HETI 5 ÓRA
 EURÓPAI ÉRETTSÉGI 2008 MATEMATIKA HETI 5 ÓRA IDŐPONT : 2008. június 5 (reggel) A VIZSGA IDŐTARTAMA: 4 óra (240 perc) MEGENGEDETT ESZKÖZÖK: Európai képletgyűjtemény Nem programozható, nem grafikus számológép
EURÓPAI ÉRETTSÉGI 2008 MATEMATIKA HETI 5 ÓRA IDŐPONT : 2008. június 5 (reggel) A VIZSGA IDŐTARTAMA: 4 óra (240 perc) MEGENGEDETT ESZKÖZÖK: Európai képletgyűjtemény Nem programozható, nem grafikus számológép