Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
|
|
|
- Emília Boglárka Nagy
- 10 évvel ezelőtt
- Látták:
Átírás
1 Aktuátorok


2 Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak.

3 mért nagyság A fizikai nagyság elektromos jellé alakitása SZENZOR KÖRNYEZET AKTUÁTOR A jel átalakitása hövé, elmozdulássá pozicióvá stb. Mért magyság [V], [A], [H], [F], stb. A/D A jel szimbólummá alakitása Vezérlö algoritmus D/A A szimbólum jellé alakitása.
![pozicióvá stb. Mért magyság [V], [A], [H], [F], stb.](/docs-images/43/1568927/images/page_3.jpg "A/D A jel szimbólummá alakitása Vezérlö algoritmus D/A A")
4 Tartalom 1. Bevezetés 2. Mechanikai aktuátorok 3. Fluidmechanikaiaktuátorok 4. Villamos aktuátorok
5 Az aktuátorok feladata Az aktuátorok a vezérlőrendszerek végrehajtó szervei. Feladatuk, hogy a vezérlő algoritmus kimenő jeleit konkrét akcióvá alakítsák át. Mechanikai elmozdulás, valamely elem bekapcsolása vagy kikapcsolása, pozicionálás, tartása stb... Mozgásinformáció leképzés Az információt, illetve a vezérlőrendszer döntését az aktuátor egy digitális kód alakjában kapja, amit jellé kell átalakítani. A közölt információk alapján kinematikai láncokon keresztül valósul meg két fizikai test (mennyiség) között szükséges relativ mozgás.

6 Kinematikának hívjuk a mechanika azt a részét, amely a testek mozgásának geometriai tulajdonságait tanulmányozza figyelmen kívül hagyva a testek tömegét, (tehetetlenségét) és a testre ható erőket. A végrehajtó szerv, és az objektum melyen az operációt végezzük, helyzetétől függően lineáris vagy/és rotációs elmozdulások kombinációjával éri el a kívánt egymáshoz viszonyított helyzetet, vagy hajtja végra a kívánt akciót. A kinematikus láncok számát, egymással való kapcsolatát (technológiai, kinematikai), a mozgások összekapcsolásának módját (soros, párhuzamos) a feladat határozza meg.

7 A kinematikai láncok lehetnek tisztán: -mechanikus, elektronikus, hidraulikus, pneumatikus, termikus,... vagy vegyesek, mint: elektromechanikus, elektrohidraulikus, elektropneumatikus, hidropneumatikus, stb.

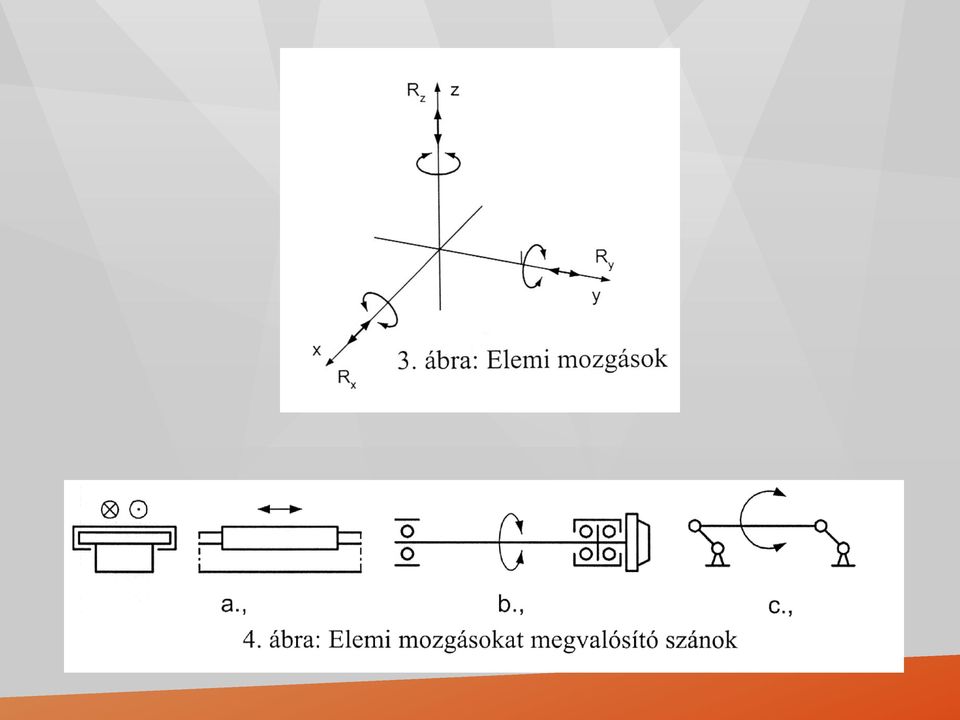
8 Relatív és elemi mozgások A mechatronikai rendszerekben valamely elempár között szükséges relativ mozgásokat célszerűen elemi mozgásokból hozzuk létre. Az elemi mozgások, illetve azt megvalósító szánok a Descartesi derékszögű koordinátarendszer tengelyeinek megfelelően, legtöbbször merőlegesen épülnek egymásra. Elemi mozgások, szánok A térnek 6 (3 egyenesvonalú haladó, 3 forgó) szabadságfoka van. Az elemi mozgásokat szánok valósítják meg: egyenesvonalú haladó mozgást lineáris szánok, forgómozgást forgó szánok, orsók, tengelyek, körasztalok, transzlációs körmozgású szánok, stb.
 szabadságfoka van.")
9
10 Megjegyzés: Ha lehet mindig forgómozgású szerkezetet építsünk és csak a kinematikai lánc legvégén alakítsuk át a forgó mozgást egyenesvonalú haladó vagy más mozgássá. Ennek előnyei: dinamikailag kedvezőbb szerkezet, forgó mozgásnál magas mozgásparaméterek biztosíthatók, a forgásszimmetrikus alkatrészek előállítása olcsóbb.

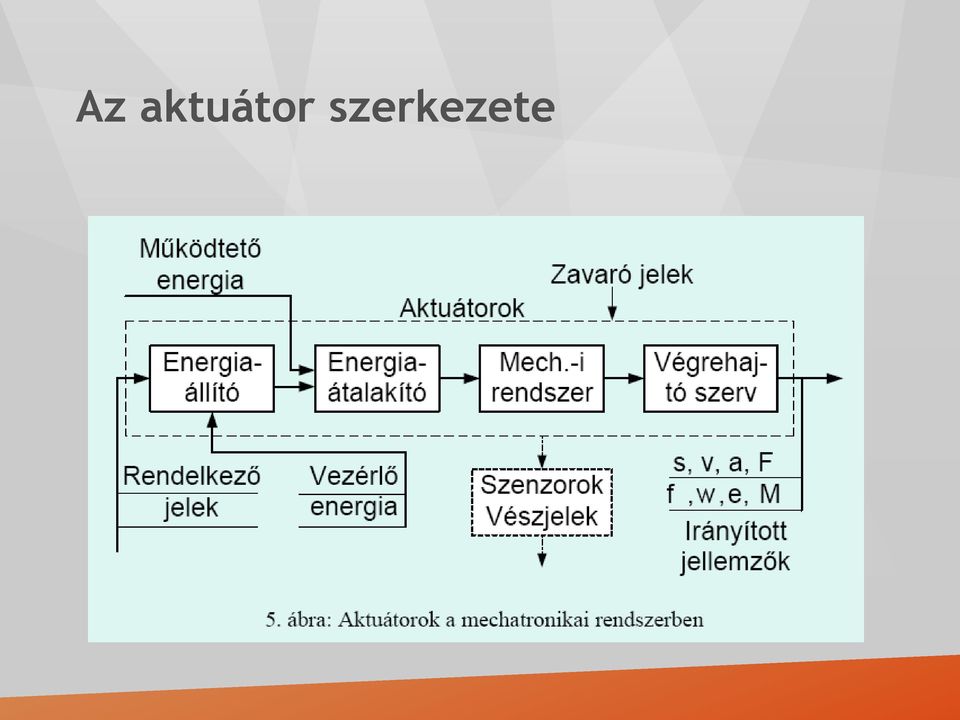
11 Az aktuátor fogalma Az "aktuátor" szó magyarázatát a latin aktor = cselekvőt is jelentő szóból inditjuk. Az energia bevezetésétől az energia felhasználásáig terjedő kinematikai láncban elhelyezkedő, mozgást (vagy állapotváltozást) létrehozó és átalakító rendszerek, egységek, elemek összessége. A kimeneten végrehajtó szerv helyezkedik el, amely meghatározott kinematikai elmozdulást, sebességet, gyorsulást, erőt vagy nyomatékot hoz létre

12 Az aktuátor szerkezete
13 Energiaátalakítók, energiafajták Működtető energiaként a továbbiakban olyan energiákat tekintünk, amelyek hállózatról levehetők, a berendezések elhelyezését nem befolyásolják, vagy a berendezés mellé telepíthető az energiaforrás. A legkészefevőbb és legrugalmasabb energiaforrás a villamos energia. A villamos energiát átalakítók teszik alkalmassá másfajta energia kifejtésére

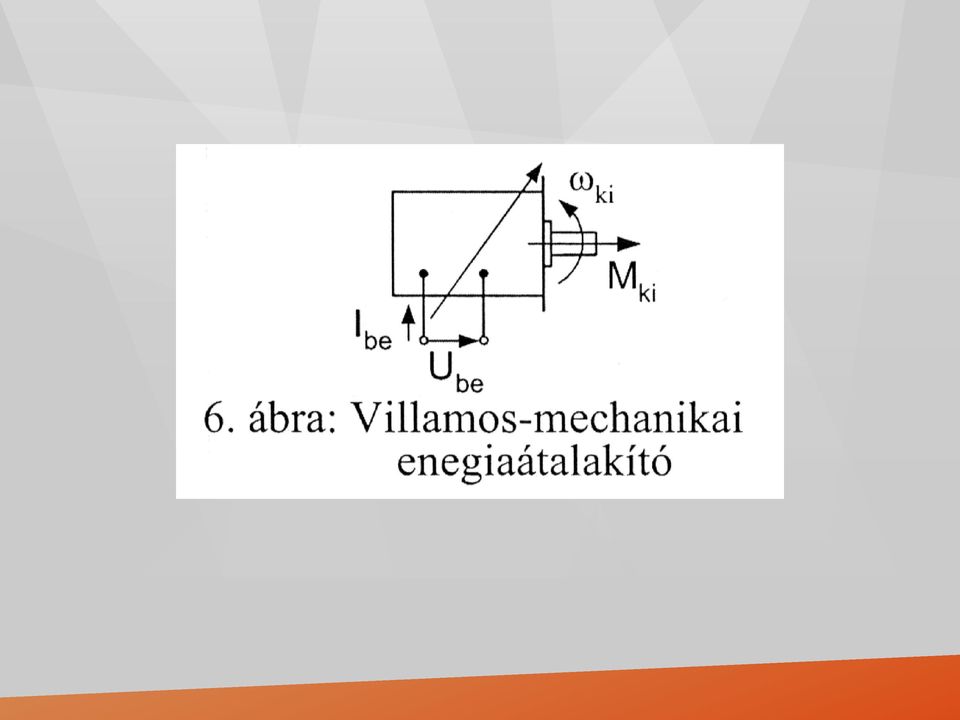
14 Villamos-mechanikai energiaátalakítók. A villamos forgómotor kapcsain keresztül betáplált villamos teljesítmény a motor tengelyén mechanikai teljesítményként jelenik meg, amely legtöbbször további mechanikus aktuátorok kiinduló láncszeme. Villamos motorok típusai: egyenáramú, szinkron, aszinkron, léptető motor stb.

15
16 villamos-mechanikai-fluidmechanikaimechanikai energiaát-alakítók. A motorhoz kapcsolt szivattyú a mechanikai teljesítményt (P m ) fluidmechanikai teljesítménnyé (P fl ) alakítja át, amelyet azután mechanikai munka végzésére használunk fel.
 fluidmechanikai teljesítménnyé (P fl ) alakítja át,")
17 Energiaátalakításkor a hasznos levehető teljesítmény csökken az átalakító egység hatásfokától függően: P izl ul gub 1 P ul P P ul P P P gub ul Léteznek olyan átalakítók melyeknek a bemenetükön és a kimenetükön ugyanolyan fajta energia jelenik meg: villamos-villamos mechanikai-mechanikai fluid-fluid

18 Teljesítményösszefüggések (potenciál)x(áramlásérték) Mechanikai teljesítmény haladó mozgásnál ahol: v F forgó mozgásnál ahol: M P m = v F Nm/s -sebesség m/s -erő N P m = M Nm/s -szögsebesség 1/s -nyomaték Nm

19 Villamos teljesítmény P el = UI VA ahol: U -feszültség V I -áramerősség A

20 Fluidmechanikai teljesítmény P fl = p Q Nm/s ahol: p Q -nyomás N/m 2 = Pa -térfogatáram m 3 /s

21 Termikus teljesítmény P term = ThA Nm/s=W ahol: T h A -hőmérsékletkülönbség C -hőátadási tényező W/m 2 C -hőátadási felület m 2
22 Kémiai teljesítmény P m =H a B = M J/s=W ahol: H a -a tüzelőanyag fűtőértéke J/kg B -az időegység alatti üzemanyag fogyasztás kg/s -a rendszer összhatásfoka (37-44%)
23 Mechanikus aktuátorok A mechanikus aktuátorok típusai A mechanikai aktuátorok a kinematikai és erő viszonyok (nyomatékviszonyok) megváltoztatására szolgálnak. Tipusaik: Forgó-forgó Forgó-haladó Haladó-forgó Haladó-haladó.
24 Forgó-forgó mozgásátalakítók Fogaskerékhajtások, a hengeres fogaskerekes, kúpfogaskerekes és csigahajtások.
25
26 Szíjhajtások laposszíj, ékszíj, fogazott szíjhajtás, stb.
27
28
29
30 Fordulatszám változtatás: 1. Fokozat nélkül állítható fordulatszámú motor 2. Fokozatos hajtómű, vagy állandó áttétel 3. Hajtott tengely (főorsó) végrehajtó szerv. 4. Tengelykapcsoló
31 Fogaskerékhajtások hézagtalanítása
32
33 Forgó-haladó mozgásátalakítók

34 A hézagtalan és előfeszített un. golyósorsó-anya párt széles körben alkalmazzák precíziós hajtásokban, hosszabb löketeknél utazó hajtásként
35
36 Haladó-forgó mozgásátalakítók
37 Haladó-haladó mozgásátalakítók
38
39
40
41
42
43
44
45
Pneumatika az ipari alkalmazásokban
 Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Mérnöki alapok 2. előadás
 Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
ÁLTALÁNOS JÁRMŰGÉPTAN
 ÁLTALÁNOS JÁRMŰGÉPTAN ELLENŐRZŐ KÉRDÉSEK 3. GÉPEK MECHANIKAI FOLYAMATAI 1. Definiálja a térbeli pont helyvektorát! r helyvektor előáll ortogonális (a 3 tengely egymásra merőleges) koordinátarendszer koordinátairányú
ÁLTALÁNOS JÁRMŰGÉPTAN ELLENŐRZŐ KÉRDÉSEK 3. GÉPEK MECHANIKAI FOLYAMATAI 1. Definiálja a térbeli pont helyvektorát! r helyvektor előáll ortogonális (a 3 tengely egymásra merőleges) koordinátarendszer koordinátairányú
VILLAMOS FORGÓGÉPEK. Forgó mozgás létesítése
 SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
SZÉCHENYI ISTVÁN EGYETEM HTTP://UNI.SZE.HU VILLAMOS FORGÓGÉPEK Forgó mozgás létesítése Marcsa Dániel Villamos gépek és energetika 203/204 - őszi szemeszter Elektromechanikai átalakítás Villamos rendszer
Érzékelők és beavatkozók
 Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
Érzékelők és beavatkozók DC motorok 1. rész egyetemi docens - 1 - Főbb típusok: Elektromos motorok Egyenáramú motor DC motor. Kefenélküli egyenáramú motor BLDC motor. Indukciós motor AC motor aszinkron
HAJTÁSTECHNIKA ÉS HAJTÁSOK A hajtásról általában
 HAJTÁSTECHNIKA ÉS HAJTÁSOK A hajtásról általában Gyakori gépészeti feladat az, amikor két különböző gépet kell összekapcsol ni. Ezeknek agépeknek általában igen különböző jelleggörbéjük van, és mégis úgy
HAJTÁSTECHNIKA ÉS HAJTÁSOK A hajtásról általában Gyakori gépészeti feladat az, amikor két különböző gépet kell összekapcsol ni. Ezeknek agépeknek általában igen különböző jelleggörbéjük van, és mégis úgy
2. E L Ő A D Á S D R. H U S I G É Z A
 Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
MTZ 320 MTZ 320 MÛSZAKI ADATOK MÉRETEK ÉS TÖMEGADATOK MOTOR ERÕÁTVITEL KORMÁNYMÛ HAJTOTT ELSÕ TENGELY ELEKTROMOS BERENDEZÉSEK FÉKBERENDEZÉS
 MTZ 320 vízhûtéses dízelmotor. LDW1503CHD Teljesítmény, kw (LE): 22 (30) Névleges fordulatszám, ford/min: 3 000 Hengerek száma: 3 Furat löket, mm: 88 85 Hengerûrtartalom, cm 3 : 1 551 Maximális nyomaték,
MTZ 320 vízhûtéses dízelmotor. LDW1503CHD Teljesítmény, kw (LE): 22 (30) Névleges fordulatszám, ford/min: 3 000 Hengerek száma: 3 Furat löket, mm: 88 85 Hengerûrtartalom, cm 3 : 1 551 Maximális nyomaték,
FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK ÁTTEKINTÉS Sajtológépek felosztása Működtetés szerint: Mechanikus sajtológépek (excenteres, könyökemelős vagy más mechanizmussal
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ GÉPEK ÁTTEKINTÉS Sajtológépek felosztása Működtetés szerint: Mechanikus sajtológépek (excenteres, könyökemelős vagy más mechanizmussal
Elektropneumatika. 3. előadás
 3. előadás Tartalom: Az elektropneumatikus vezérlés Az elektropneumatikus a rendszer elemei: hálózati tápegység, elektromechanikus kapcsoló elemek: relék, szelepek, szenzorok. Automatizálástechnika EP
3. előadás Tartalom: Az elektropneumatikus vezérlés Az elektropneumatikus a rendszer elemei: hálózati tápegység, elektromechanikus kapcsoló elemek: relék, szelepek, szenzorok. Automatizálástechnika EP
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Mechatronikai technikus szakma gyakorlati oktatásához OKJ száma: 54 523 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Foglalkozási napló a 20 /20. tanévre Mechatronikai technikus szakma gyakorlati oktatásához OKJ száma: 54 523 04 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának dátuma: Tanulók
Mérnöki alapok 11. előadás
 Mérnöki alapok 11. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
Mérnöki alapok 11. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Robert Bosch Mechatronikai Tanszék
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Robert Bosch Mechatronikai Tanszék FOKOZATNÉLKÜLI TELJESÍTMÉNY HAJTÓMŰVEK (Forgácsoló szerszámgépek fokozatnélküli főhajtóművei) Oktatási segédlet Dr.
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Robert Bosch Mechatronikai Tanszék FOKOZATNÉLKÜLI TELJESÍTMÉNY HAJTÓMŰVEK (Forgácsoló szerszámgépek fokozatnélküli főhajtóművei) Oktatási segédlet Dr.
SMARTWINCH csörlőgép baromfitartáshoz
 SMARTWINCH csörlőgép baromfitartáshoz Kezelési utasítás és műszaki tájékoztató Verzió : 01/hun POULTRY-TECH Kereskedelmi és Szolgáltató Kft. H-2943 Bábolna, Pf.: 37. Tel. 06 20 388 5550, 5543 Tel. 06 96
SMARTWINCH csörlőgép baromfitartáshoz Kezelési utasítás és műszaki tájékoztató Verzió : 01/hun POULTRY-TECH Kereskedelmi és Szolgáltató Kft. H-2943 Bábolna, Pf.: 37. Tel. 06 20 388 5550, 5543 Tel. 06 96
HELYI TANTERV. Gépelemek-géptan
 HELYI TANTERV Gépelemek-géptan 14. évfolyam 72 óra 1.1. A tantárgy tanításának célja A gépelemek-géptan tantárgy tanításának célja, a közlekedéstechnikai gyakorlatban szükséges készségek megszerzése, a
HELYI TANTERV Gépelemek-géptan 14. évfolyam 72 óra 1.1. A tantárgy tanításának célja A gépelemek-géptan tantárgy tanításának célja, a közlekedéstechnikai gyakorlatban szükséges készségek megszerzése, a
Aszinkron villanymotor kiválasztása és összeépítési tervezési feladat
 Aszinkron villanymotor kiválasztása és összeépítési tervezési feladat A feladat egy aszinkron villanymotor és homlokkerekes hajtómű összeépítése ékszíjhajtáson keresztül! A hajtó ékszíjtárcsát a motor
Aszinkron villanymotor kiválasztása és összeépítési tervezési feladat A feladat egy aszinkron villanymotor és homlokkerekes hajtómű összeépítése ékszíjhajtáson keresztül! A hajtó ékszíjtárcsát a motor
Gyártástechnológia alapjai
 Gyártástechnológia alapjai BAGGA11MNC SZERSZÁMGÉPEK 3. Előadás Óbudai Egyetem, BGK AGI-GGY Forgómozgású főhajtóművek csoportosítása Forgómozgást létesítő hajtóművek 2 Főhajtás variációk Fokozatos típusok
Gyártástechnológia alapjai BAGGA11MNC SZERSZÁMGÉPEK 3. Előadás Óbudai Egyetem, BGK AGI-GGY Forgómozgású főhajtóművek csoportosítása Forgómozgást létesítő hajtóművek 2 Főhajtás variációk Fokozatos típusok
Infobionika ROBOTIKA. IX. Előadás. Robot manipulátorok I. Alapfogalmak. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Irányításelmélet és technika I.
 Irányításelmélet és technika I. Mechanikai rendszerek dinamikus leírása Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 2010
Irányításelmélet és technika I. Mechanikai rendszerek dinamikus leírása Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 2010
Budapesti Műszaki és Gazdaságtudományi Egyetem Építőgépek, Anyagmozgatógépek és Üzemi Logisztika Tanszék. Közlekedéstan II.
 Budapesti Műszaki és Gazdaságtudományi Egyetem Építőgépek, Anyagmozgatógépek és Üzemi Logisztika Tanszék Közlekedéstan II. (Szemcsés anyagok tömörítése, tömörítőgépek ) Készítette: Dr. Rácz Kornélia egyetemi
Budapesti Műszaki és Gazdaságtudományi Egyetem Építőgépek, Anyagmozgatógépek és Üzemi Logisztika Tanszék Közlekedéstan II. (Szemcsés anyagok tömörítése, tömörítőgépek ) Készítette: Dr. Rácz Kornélia egyetemi
FOGLALKOZÁSI TERV. MŰSZAKI ALAPOZÓ, FIZIKA ÉS GÉPGYÁRTTECHN. 2018/2019. tanév, II. félév Tantárgy kód: BAI0082 Kollokvium, kredit: 5
 FOGLALKOZÁSI TERV NYÍREGYHÁZI EGYETEM Gépelemek II. tantárgy MŰSZAKI ALAPOZÓ, FIZIKA ÉS GÉPGYÁRTTECHN. 018/019. tanév, II. félév TANSZÉK Tantárgy kód: BAI008 Kollokvium, kredit: 5 Tanítási hetek száma:
FOGLALKOZÁSI TERV NYÍREGYHÁZI EGYETEM Gépelemek II. tantárgy MŰSZAKI ALAPOZÓ, FIZIKA ÉS GÉPGYÁRTTECHN. 018/019. tanév, II. félév TANSZÉK Tantárgy kód: BAI008 Kollokvium, kredit: 5 Tanítási hetek száma:
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések
 Záróvizsga orientáló kérdések") Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések 2015-2016. tanév 1. félévtől Összeállította: Dr. Németh István, Tóth András, Püspöki János Az orientáló kérdések célja
Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések 2015-2016. tanév 1. félévtől Összeállította: Dr. Németh István, Tóth András, Püspöki János Az orientáló kérdések célja
A tételekhez segédeszköz nem használható.
 A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a 4. Szakmai követelmények fejezetben szereplő szakmai követelménymodulok témaköreit tartalmazza A tételekhez
A vizsgafeladat ismertetése: A szóbeli vizsgatevékenység központilag összeállított vizsgakérdései a 4. Szakmai követelmények fejezetben szereplő szakmai követelménymodulok témaköreit tartalmazza A tételekhez
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Használható segédeszköz: Függvénytáblázat, szöveges adatok tárolására és megjelenítésére nem alkalmas zsebszámológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
Örvényszivattyú A feladat
 Örvényszivattyú A feladat 1. Adott n fordulatszám mellett határozza meg a gép jellemző fordulatszámát az optimális üzemi pont mérésből becsült értéke alapján: a) n = 1700/min b) n = 1800/min c) n = 1900/min
Örvényszivattyú A feladat 1. Adott n fordulatszám mellett határozza meg a gép jellemző fordulatszámát az optimális üzemi pont mérésből becsült értéke alapján: a) n = 1700/min b) n = 1800/min c) n = 1900/min
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
TERMÉKISMERTETŐ. NCT KFT. 1148 BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: 12158791-2-42, CÉGJEGYZÉKSZÁM: nct@nct.hu
 Tárgy: NCT KFT. 1148 BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: 12158791-2-42, CÉGJEGYZÉKSZÁM: 01-09-560655, EU. ADÓSZÁM: HU 121 58 791, TEL +36 1 46 76 300, FAX +36 1 46 76 309 SMART-42 és -30Ms CNC esztergagép
Tárgy: NCT KFT. 1148 BUDAPEST, FOGARASI ÚT 7. ADÓSZÁM: 12158791-2-42, CÉGJEGYZÉKSZÁM: 01-09-560655, EU. ADÓSZÁM: HU 121 58 791, TEL +36 1 46 76 300, FAX +36 1 46 76 309 SMART-42 és -30Ms CNC esztergagép
Intelligens gépek elemei Bevezetés
 Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
FOGLALKOZÁSI TERV. MŰSZAKI ALAPOZÓ, FIZIKA ÉS GÉPGYÁRTTECHN. 2017/2018. tanév, II. félév Tantárgy kód: AMB1401 Kollokvium, kredit: 3
 FOGLALKOZÁSI TERV NYÍREGYHÁZI EGYETEM Gépelemek II. tantárgy MŰSZAKI ALAPOZÓ, FIZIKA ÉS GÉPGYÁRTTECHN. 017/018. tanév, II. félév TANSZÉK Tantárgy kód: AMB1401 Kollokvium, kredit: 3 Tanítási hetek száma:
FOGLALKOZÁSI TERV NYÍREGYHÁZI EGYETEM Gépelemek II. tantárgy MŰSZAKI ALAPOZÓ, FIZIKA ÉS GÉPGYÁRTTECHN. 017/018. tanév, II. félév TANSZÉK Tantárgy kód: AMB1401 Kollokvium, kredit: 3 Tanítási hetek száma:
BEMUTATÓ FELADATOK (2) ÁLTALÁNOS GÉPTAN tárgyból
 ÁLTALÁNOS GÉPTAN tárgyból") BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő évi kerettanterve alapján. 10. évfolyam
 Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő 2018. évi kerettanterve alapján 10. évfolyam Számonkérés: feladatlap megoldása, szóbeli tétel húzása Szükséges eszközök: toll Bevezetés, kötőgépelemek,
Gépelemek-géptan, Osztályozó vizsga témakörök, az Autószerelő 2018. évi kerettanterve alapján 10. évfolyam Számonkérés: feladatlap megoldása, szóbeli tétel húzása Szükséges eszközök: toll Bevezetés, kötőgépelemek,
Elektrotechnika. Ballagi Áron
 Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
Elektrotechnika Ballagi Áron Mágneses tér Elektrotechnika x/2 Mágneses indukció kísérlet Állandó mágneses térben helyezzünk el egy l hosszúságú vezetőt, és bocsássunk a vezetőbe I áramot! Tapasztalat:
TARTALOMJEGYZÉK. Előszó 9
 TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
TARTALOMJEGYZÉK 3 Előszó 9 1. Villamos alapfogalmak 11 1.1. A villamosság elő for d u lá s a é s je le n t ősége 12 1.1.1. Történeti áttekintés 12 1.1.2. A vil la mos ság tech ni kai, tár sa dal mi ha
Wigner Jenő Műszaki, Informatikai Középiskola és Kollégium // OKJ: Elektronikai technikus szakképesítés.
 1 rész 090006 090006/1gy nap nap nap 4. nap 5. nap 6. nap tevékenység 2014.05.13 2014.06.11 2014.06.12 Internetről szakmai dokumentumok letöltése, belőle prezentáció készítése VIZSGAREND A vizsgaszervező
1 rész 090006 090006/1gy nap nap nap 4. nap 5. nap 6. nap tevékenység 2014.05.13 2014.06.11 2014.06.12 Internetről szakmai dokumentumok letöltése, belőle prezentáció készítése VIZSGAREND A vizsgaszervező
Szóbeli vizsgatantárgyak
 Szóbeli vizsgatantárgyak 1. Villamosságtani és gépészeti alapismeretek A) Mechanika, gépelemek B) Műszaki ábrázolás, anyag- és gyártásismeret C) Műszaki villamosságtan 2. Szakmai ismeretek A) Szerkezettan
Szóbeli vizsgatantárgyak 1. Villamosságtani és gépészeti alapismeretek A) Mechanika, gépelemek B) Műszaki ábrázolás, anyag- és gyártásismeret C) Műszaki villamosságtan 2. Szakmai ismeretek A) Szerkezettan
9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK
 9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK 1.A gyakorlat célja Az MPX12DP piezorezisztiv differenciális nyomásérzékelő tanulmányozása. A nyomás feszültség p=f(u) karakterisztika megrajzolása. 2. Elméleti
9. Laboratóriumi gyakorlat NYOMÁSÉRZÉKELŐK 1.A gyakorlat célja Az MPX12DP piezorezisztiv differenciális nyomásérzékelő tanulmányozása. A nyomás feszültség p=f(u) karakterisztika megrajzolása. 2. Elméleti
Élelmiszeripari folyamatirányítás 2016.03.12.
 Élelmiszeripari folyamatirányítás 2016.03.12. Hidraulikus rendszerek Közeg: hidraulika-olaj Nyomástartomány: ált. 200-400 bar Előnyök: Hátrányok: - Nagy erők kifejtésére alkalmas (200-400 bar!) - Kisebb
Élelmiszeripari folyamatirányítás 2016.03.12. Hidraulikus rendszerek Közeg: hidraulika-olaj Nyomástartomány: ált. 200-400 bar Előnyök: Hátrányok: - Nagy erők kifejtésére alkalmas (200-400 bar!) - Kisebb
Régió RPO Kód LDE&MFH LDE&MFH&5EA PT kombináció 1.6 MT 1.6 MT. Váltóáttétel
 Régió RPO Kód LDE&MFH LDE&MFH&5EA PT kombináció 1.6 MT 1.6 MT Motor adatok Motor, elhelyezkedés elöl, keresztben beépítve elöl, keresztben beépítve Hűtőrendszer zárt rendszerű, folyadékhűtés zárt rendszerű,
Régió RPO Kód LDE&MFH LDE&MFH&5EA PT kombináció 1.6 MT 1.6 MT Motor adatok Motor, elhelyezkedés elöl, keresztben beépítve elöl, keresztben beépítve Hűtőrendszer zárt rendszerű, folyadékhűtés zárt rendszerű,
Robotika. A robotok története - bevezetés. Magyar Attila amagyar@almos.vein.hu
 Robotika A robotok története - bevezetés Magyar Attila amagyar@almos.vein.hu A robotok története Idő Irodalmi utalás, esemény Robot, vagy szerkezet Kr.e.1000 Kr.e. 800 Kr.e. 400 Kr.e. 300 Biblia (Ter.):
Robotika A robotok története - bevezetés Magyar Attila amagyar@almos.vein.hu A robotok története Idő Irodalmi utalás, esemény Robot, vagy szerkezet Kr.e.1000 Kr.e. 800 Kr.e. 400 Kr.e. 300 Biblia (Ter.):
6. Előadás. Mechanikai jellegű gépelemek
 6. Előadás Mechanikai jellegű gépelemek 1 funkció: két tengely összekapcsolása + helyzethibák kiegyenlítése + nyomatéklökések kiegyenlítése + oldhatóság + szabályozhatóság 1 2 1 hm 2 2 kapcsolható állandó
6. Előadás Mechanikai jellegű gépelemek 1 funkció: két tengely összekapcsolása + helyzethibák kiegyenlítése + nyomatéklökések kiegyenlítése + oldhatóság + szabályozhatóság 1 2 1 hm 2 2 kapcsolható állandó
Mechanika, dinamika. p = m = F t vagy. m t
 Mechanika, dinamika Mozgás, alakváltozás és ennek háttere Newton: a mozgás természetes állapot. A témakör egyik kulcsfontosságú fizikai mennyisége az impulzus (p), vagy lendület, vagy mozgásmennyiség.
Mechanika, dinamika Mozgás, alakváltozás és ennek háttere Newton: a mozgás természetes állapot. A témakör egyik kulcsfontosságú fizikai mennyisége az impulzus (p), vagy lendület, vagy mozgásmennyiség.
T Ö R P E M O T O R O K
 VILLANYSZERELŐ KÉPZÉS 2 0 1 5 T Ö R P E M O T O R O K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Törpemotorok fogalma...3 Reluktancia motor...3 Árnyékolt pólusú motor...3 Szervomotorok...4
VILLANYSZERELŐ KÉPZÉS 2 0 1 5 T Ö R P E M O T O R O K ÖSSZEÁLLÍTOTTA NAGY LÁSZLÓ MÉRNÖKTANÁR - 2 - Tartalomjegyzék Törpemotorok fogalma...3 Reluktancia motor...3 Árnyékolt pólusú motor...3 Szervomotorok...4
Elektrotechnika. Dr. Hodossy László előadás
 Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
Elektrotechnika 13 előadás Dr Hodossy László 2006 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Szervo Lineáris Lineáris Lineáris Szervo Vezérlő és szabályozó rendszerekben pozícionálási célra alkalmazzák
ADATLAP MICRO XL A SZERKEZET LEÍRÁSA. 50 Hz LÖKETHOSSZ SÚLY AZ EGYES CSOMAGOK MÉRETEI
 ADATLAP MICRO XL Az ebben a dokumentációban nem található információt és/vagy műszaki dokumentációt kérjék a Mingardi Magnetic vállalat műszaki/kereskedelmi osztályától. A SZERKEZET LEÍRÁSA színezés, RAL-színek.
ADATLAP MICRO XL Az ebben a dokumentációban nem található információt és/vagy műszaki dokumentációt kérjék a Mingardi Magnetic vállalat műszaki/kereskedelmi osztályától. A SZERKEZET LEÍRÁSA színezés, RAL-színek.
DFTH november
 Kovács Ernő 1, Füves Vktor 2 1,2 Elektrotechnka és Elektronka Tanszék Mskolc Egyetem 3515 Mskolc-Egyetemváros tel.: +36-(46)-565-111 mellék: 12-16, 12-18 fax : +36-(46)-563-447 elkke@un-mskolc.hu 1, elkfv@un-mskolc.hu
Kovács Ernő 1, Füves Vktor 2 1,2 Elektrotechnka és Elektronka Tanszék Mskolc Egyetem 3515 Mskolc-Egyetemváros tel.: +36-(46)-565-111 mellék: 12-16, 12-18 fax : +36-(46)-563-447 elkke@un-mskolc.hu 1, elkfv@un-mskolc.hu
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Elektromos gép- és készülékszerelő szakma gyakorlati oktatásához OKJ száma: 34 522 02 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Foglalkozási napló a 20 /20. tanévre Elektromos gép- és készülékszerelő szakma gyakorlati oktatásához OKJ száma: 34 522 02 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
+ Egyszeres muködésu szögletes henger: +Tömlohenger: (17. ábra) Jellemzok
 Jellemzok") 19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
 A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített
Mérnöki alapok 2. előadás
 Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
Mérnöki alapok. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334. Tel:
AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV
 Adatlap Szelepmozgató motorok három-pont szabályozáshoz AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV 33 - DIN EN 14597 bizonyítvánnyal rendelkező biztonsági funkció (záró rugó) Leírás AMV 10 AMV 13 AMV 20,
Adatlap Szelepmozgató motorok három-pont szabályozáshoz AMV 10, AMV 20, AMV 30 AMV 13, AMV 23, AMV 33 - DIN EN 14597 bizonyítvánnyal rendelkező biztonsági funkció (záró rugó) Leírás AMV 10 AMV 13 AMV 20,
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján.
 NFM rendelet szakmai és vizsgakövetelménye alapján.") 12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
12/2013. (III. 29.) NFM rendelet szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 525 01 Autóelektronikai műszerész Tájékoztató A vizsgázó az első lapra írja fel
Útváltók. Fenyvesi D. Dr. Harkay G. OE-BGK
 Útváltók Fenyvesi D. Dr. Harkay G. OE-BGK Irányítóelemek Irányítóelemek A hidraulikus rendszer alapvető irányítási feladatait, a működtetett rendszer igényei határozzák meg, mint pl. Mozgásirány: útváltók.
Útváltók Fenyvesi D. Dr. Harkay G. OE-BGK Irányítóelemek Irányítóelemek A hidraulikus rendszer alapvető irányítási feladatait, a működtetett rendszer igényei határozzák meg, mint pl. Mozgásirány: útváltók.
Elektrotechnika "A" tételek
 Elektrotechnika "A" tételek A1. Sorolja fel az energiaforrások fajtáit! Jellemezze üzemállapotaikat! Ismertesse kapcsolási lehetőségeiket! Ismertesse a Thevenin- és a Norton helyettesítő képek kölcsönös
Elektrotechnika "A" tételek A1. Sorolja fel az energiaforrások fajtáit! Jellemezze üzemállapotaikat! Ismertesse kapcsolási lehetőségeiket! Ismertesse a Thevenin- és a Norton helyettesítő képek kölcsönös
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Tárgymutató. dinamika, 5 dinamikai rendszer, 4 végtelen sok állapotú, dinamikai törvény, 5 dinamikai törvények, 12 divergencia,
 Tárgymutató állapottér, 3 10, 107 általánosított impulzusok, 143 147 általánosított koordináták, 143 147 áramlás, 194 197 Arisztotelész mozgástörvényei, 71 77 bázisvektorok, 30 centrifugális erő, 142 ciklikus
Tárgymutató állapottér, 3 10, 107 általánosított impulzusok, 143 147 általánosított koordináták, 143 147 áramlás, 194 197 Arisztotelész mozgástörvényei, 71 77 bázisvektorok, 30 centrifugális erő, 142 ciklikus
Pere Balázs október 20.
 Végeselem anaĺızis 1. előadás Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2014. október 20. Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)?
Végeselem anaĺızis 1. előadás Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2014. október 20. Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)?
A munkavégzés a rendszer és a környezete közötti energiacserének a D hőátadástól eltérő valamennyi más formája.
 11. Transzportfolyamatok termodinamikai vonatkozásai 1 Melyik állítás HMIS a felsoroltak közül? mechanikában minden súrlódásmentes folyamat irreverzibilis. disszipatív folyamatok irreverzibilisek. hőmennyiség
11. Transzportfolyamatok termodinamikai vonatkozásai 1 Melyik állítás HMIS a felsoroltak közül? mechanikában minden súrlódásmentes folyamat irreverzibilis. disszipatív folyamatok irreverzibilisek. hőmennyiség
Széchenyi István Egyetem NYOMATÉKÁTSZÁRMAZTATÓ HAJTÁSOK
 NYOMATÉKÁTSZÁRMAZTATÓ HAJTÁSOK A tengelyek között olyan kapcsolatot létesítő egységet, amely a forgatónyomaték egyszerű átvitelén kívül azt változtatni is tudja, hajtóműnek, a hajtóműveken belül a különböző
NYOMATÉKÁTSZÁRMAZTATÓ HAJTÁSOK A tengelyek között olyan kapcsolatot létesítő egységet, amely a forgatónyomaték egyszerű átvitelén kívül azt változtatni is tudja, hajtóműnek, a hajtóműveken belül a különböző
Elektrotechnika 9. évfolyam
 Elektrotechnika 9. évfolyam Villamos áramkörök A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
Elektrotechnika 9. évfolyam Villamos áramkörök A villamos áramkör. A villamos áramkör részei. Ideális feszültségforrás. Fogyasztó. Vezeték. Villamos ellenállás. Ohm törvénye. Részfeszültségek és feszültségesés.
A klasszikus mechanika alapjai
 A klasszikus mechanika alapjai FIZIKA 9. Mozgások, állapotváltozások 2017. október 27. Tartalomjegyzék 1 Az SI egységek Az SI alapegységei Az SI előtagok Az SI származtatott mennyiségei 2 i alapfogalmak
A klasszikus mechanika alapjai FIZIKA 9. Mozgások, állapotváltozások 2017. október 27. Tartalomjegyzék 1 Az SI egységek Az SI alapegységei Az SI előtagok Az SI származtatott mennyiségei 2 i alapfogalmak
(Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.)
 könyvéből vannak.)") Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
Egyenáramú gépek (Az 1. példa adatai Uray-Szabó: Elektrotechnika c. (Nemzeti Tankönyvkiadó) könyvéből vannak.) 1. Párhuzamos gerjesztésű egyenáramú motor 500 V kapocsfeszültségű, párhuzamos gerjesztésű
ÚTMUTATÓ FOGASKERÉK-HAJTÓMŰVEK KIVÁLASZTÁSÁHOZ
 BUDAPESTI MŰSZAKI...EGYETEM Gépszerkezettani Intézet ÚTMUTATÓ FOGASKERÉK-HAJTÓMŰVEK KIVÁLASZTÁSÁHOZ GÉPELEMEK III. GE04GA 1. INFORMÁCIÓFORRÁSOK A RAJZFELADATHOZ a) A Gépszerkezettani Intézet honlapján
BUDAPESTI MŰSZAKI...EGYETEM Gépszerkezettani Intézet ÚTMUTATÓ FOGASKERÉK-HAJTÓMŰVEK KIVÁLASZTÁSÁHOZ GÉPELEMEK III. GE04GA 1. INFORMÁCIÓFORRÁSOK A RAJZFELADATHOZ a) A Gépszerkezettani Intézet honlapján
670 milliszekundumos csomagolási ciklusidő
 670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
Foglalkozási napló a 20 /20. tanévre
 Foglalkozási napló a 20 /20. tanévre Elektromos gép- és készülékszerelő szakma gyakorlati oktatásához OKJ száma: 34 522 02 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Foglalkozási napló a 20 /20. tanévre Elektromos gép- és készülékszerelő szakma gyakorlati oktatásához OKJ száma: 34 522 02 A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
ERŐSÁRAMÚ ELEKTROTECHNIKUS
 I. Általános irányelvek 1. A képzés szabályozásának jogi háttere A központi program a közoktatásról szóló 1993. évi LXXIX. törvény, a szakképzésről szóló 1993. évi LXXVI. törvény, a gazdasági kamarákról
I. Általános irányelvek 1. A képzés szabályozásának jogi háttere A központi program a közoktatásról szóló 1993. évi LXXIX. törvény, a szakképzésről szóló 1993. évi LXXVI. törvény, a gazdasági kamarákról
KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS
 KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS 1 EGYENLETES KÖRMOZGÁS Pálya kör Út ív Definíció: Test körpályán azonos irányban haladva azonos időközönként egyenlő íveket tesz meg. Periodikus mozgás 2 PERIODICITÁS
KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS 1 EGYENLETES KÖRMOZGÁS Pálya kör Út ív Definíció: Test körpályán azonos irányban haladva azonos időközönként egyenlő íveket tesz meg. Periodikus mozgás 2 PERIODICITÁS
Mérnöki alapok 10. előadás
 Mérnöki alapok 10. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
Mérnöki alapok 10. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék 1111, Budapest, Műegyetem rkp. 3. D ép. 334.
9. évfolyam. Osztályozóvizsga tananyaga FIZIKA
 9. évfolyam Osztályozóvizsga tananyaga A testek mozgása 1. Egyenes vonalú egyenletes mozgás 2. Változó mozgás: gyorsulás fogalma, szabadon eső test mozgása 3. Bolygók mozgása: Kepler törvények A Newtoni
9. évfolyam Osztályozóvizsga tananyaga A testek mozgása 1. Egyenes vonalú egyenletes mozgás 2. Változó mozgás: gyorsulás fogalma, szabadon eső test mozgása 3. Bolygók mozgása: Kepler törvények A Newtoni
Vizsgatémakörök fizikából A vizsga minden esetben két részből áll: Írásbeli feladatsor (70%) Szóbeli felelet (30%)
 Szóbeli felelet (30%)") Vizsgatémakörök fizikából A vizsga minden esetben két részből áll: Írásbeli feladatsor (70%) Szóbeli felelet (30%) A vizsga értékelése: Elégtelen: ha az írásbeli és a szóbeli rész összesen nem éri el a
Vizsgatémakörök fizikából A vizsga minden esetben két részből áll: Írásbeli feladatsor (70%) Szóbeli felelet (30%) A vizsga értékelése: Elégtelen: ha az írásbeli és a szóbeli rész összesen nem éri el a
ELEKTROMOS GÉP- ÉS KÉSZÜLÉKSZERELŐ SZAKKÉPESÍTÉS KÖZPONTI PROGRAMJA
 ELEKTROMOS GÉP- ÉS KÉSZÜLÉKSZERELŐ SZAKKÉPESÍTÉS KÖZPONTI PROGRAMJA I. A szakképesítés adatai, a képzés szervezésének feltételei és a szakképesítés óraterve 1. A szakképesítés adatai A szakképesítés azonosító
ELEKTROMOS GÉP- ÉS KÉSZÜLÉKSZERELŐ SZAKKÉPESÍTÉS KÖZPONTI PROGRAMJA I. A szakképesítés adatai, a képzés szervezésének feltételei és a szakképesítés óraterve 1. A szakképesítés adatai A szakképesítés azonosító
Programozható Vezérlő Rendszerek. Hardver
 Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Programozható Vezérlő Rendszerek Hardver Hardver-bemeneti kártyák 12-24 Vdc 100-120 Vac 10-60 Vdc 12-24 Vac/dc 5 Vdc (TTL) 200-240 Vac 48 Vdc 24 Vac Belül 5V DC!! 2 Hardver-bemeneti kártyák Potenciál ingadozások
Tápegység tervezése. A felkészüléshez szükséges irodalom Alkalmazandó műszerek
 Tápegység tervezése Bevezetés Az elektromos berendezések működéséhez szükséges energiát biztosító források paraméterei gyakran különböznek a berendezés részegységeinek követelményeitől. A megfelelő paraméterű
Tápegység tervezése Bevezetés Az elektromos berendezések működéséhez szükséges energiát biztosító források paraméterei gyakran különböznek a berendezés részegységeinek követelményeitől. A megfelelő paraméterű
ÚJ! Fluke 438-II Hálózat- minőség és motor analizátor
 Ismerje meg villamos motorja teljesítőképességét mechanikus érzékelők használata nélkül ÚJ! Fluke 438-II Hálózat- minőség és motor analizátor Végezzen hibakeresést közvetlenül, on-line, üzemben lévő motorján
Ismerje meg villamos motorja teljesítőképességét mechanikus érzékelők használata nélkül ÚJ! Fluke 438-II Hálózat- minőség és motor analizátor Végezzen hibakeresést közvetlenül, on-line, üzemben lévő motorján
Tengelykapcsoló laboratóriumi gyakorlat / 2015 tavaszi félév. Trencséni Balázs, BME Gépjárművek Tanszék
 Gépjármű erőátvitel Tengelykapcsoló laboratóriumi gyakorlat 2014 / 2015 tavaszi félév 1 Tartalom o o o o o Balesetvédelmi oktatás Nyilatkozat aláírása Mérőrendszer bemutatása Mérési feladat ismertetése
Gépjármű erőátvitel Tengelykapcsoló laboratóriumi gyakorlat 2014 / 2015 tavaszi félév 1 Tartalom o o o o o Balesetvédelmi oktatás Nyilatkozat aláírása Mérőrendszer bemutatása Mérési feladat ismertetése
Elektromechanikai rendszerek szimulációja
 Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
Kandó Polytechnic of Technology Institute of Informatics Kóré László Elektromechanikai rendszerek szimulációja I Budapest 1997 Tartalom 1.MINTAPÉLDÁK...2 1.1 IDEÁLIS EGYENÁRAMÚ MOTOR FESZÜLTSÉG-SZÖGSEBESSÉG
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
Euro LUJ&M60&5EA 2H0&MSA&5EA 2H0&MH8&5EA LNP&MYJ&5EA 1.4T MT 1.8L MT 1.8L AT
 Euro LUJ&M60&5EA 2H0&MSA&5EA 2H0&MH8&5EA LNP&MYJ&5EA 1.4T MT 1.8L MT 1.8L AT 2.0L Euro5 Dízel MT Motor adatok Motor, elhelyezkedés elöl, keresztben beépítve elöl, keresztben beépítve elöl, keresztben beépítve
Euro LUJ&M60&5EA 2H0&MSA&5EA 2H0&MH8&5EA LNP&MYJ&5EA 1.4T MT 1.8L MT 1.8L AT 2.0L Euro5 Dízel MT Motor adatok Motor, elhelyezkedés elöl, keresztben beépítve elöl, keresztben beépítve elöl, keresztben beépítve
Felvonók korszerő hajtása.
 Felvonók korszerő hajtása. A felvonók tömeges elterjedése szorosan összefügg a forgóáramú villamos hálózatok kialakulásával. Magyarországon az elsı villamos hálózatot 1884.-ben Temesváron állították fel.
Felvonók korszerő hajtása. A felvonók tömeges elterjedése szorosan összefügg a forgóáramú villamos hálózatok kialakulásával. Magyarországon az elsı villamos hálózatot 1884.-ben Temesváron állították fel.
203 00 00 00 Szerkezettan
 1. oldal 1. 100870 203 00 00 00 Szerkezettan A faanyagokat környezeti hatások nem károsítják, nem igényelnek kezelést. 2. 100871 203 00 00 00 Szerkezettan A szálerõsítésû mûanyagok nagy szilárdságú szálakból
1. oldal 1. 100870 203 00 00 00 Szerkezettan A faanyagokat környezeti hatások nem károsítják, nem igényelnek kezelést. 2. 100871 203 00 00 00 Szerkezettan A szálerõsítésû mûanyagok nagy szilárdságú szálakból
 Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
Szélessávú Hírközlés és Villamosságtan Tanszék Űrkutató Csoport Szabó József A fedélzeti energiaellátás kérdései: architektúrák, energiaegyensúly. Űrtechnológia Budapest, 2014. március 19. Űrtechnológia
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 522 02 Elektromos gép- és készülékszerelő
Alapfogalmak, osztályozás
 VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
VILLAMOS GÉPEK Alapfogalmak, osztályozás Gépek: szerkezetek, amelyek energia felhasználása árán munkát végeznek, vagy a felhasznált energiát átalakítják más jellegű energiává Működési elv: indukált áram
Energiamegtakarítás SULZER HST Turbókompresszorokkal
 Energiamegtakarítás SULZER HST Turbókompresszorokkal Szennyvíztisztítás Üzemeltetési Költségeinek Csökkentése Szakmai Nap Budapest, 2018. április 19. Miért a sűrített levegő ellátás? Szennyvíztisztító
Energiamegtakarítás SULZER HST Turbókompresszorokkal Szennyvíztisztítás Üzemeltetési Költségeinek Csökkentése Szakmai Nap Budapest, 2018. április 19. Miért a sűrített levegő ellátás? Szennyvíztisztító
Beavatkozószervek. Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék
 Beavatkozószervek Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék 2007.12.02. 1 Beavatkozószervek beavatkozószervek feladatuk: az irányítórendszertől (szabályzó
Beavatkozószervek Összeállította: dr. Gerzson Miklós egyetemi docens Pannon Egyetem Automatizálási Tanszék 2007.12.02. 1 Beavatkozószervek beavatkozószervek feladatuk: az irányítórendszertől (szabályzó
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Foglalkozási napló. Mechatronikus-karbantartó 15. évfolyam
 Foglalkozási napló a 20 /20. tanévre Mechatronikus-karbantartó 15. évfolyam (OKJ száma: 34 523 01) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Foglalkozási napló a 20 /20. tanévre Mechatronikus-karbantartó 15. évfolyam (OKJ száma: 34 523 01) szakma gyakorlati oktatásához A napló vezetéséért felelős: A napló megnyitásának dátuma: A napló lezárásának
Miskolci Egyetem RBMT Dr. Jakab Endre AKTUÁTOROK. Aktuátorok. Dr. Jakab Endre
 Aktuátorok Dr. Jakab Endre Tartalom Miskolci Egyetem RBMT Dr. Jakab Endre 1. Bevezetés Mozgásinformáció leképzés Relatív és elemi mozgások Elemi mozgások, szánok Struktúraképzések Az aktuátor fogalma,
Aktuátorok Dr. Jakab Endre Tartalom Miskolci Egyetem RBMT Dr. Jakab Endre 1. Bevezetés Mozgásinformáció leképzés Relatív és elemi mozgások Elemi mozgások, szánok Struktúraképzések Az aktuátor fogalma,
1. feladat Összesen 21 pont
 1. feladat Összesen 21 pont A) Egészítse ki az alábbi, B feladatrészben látható rajzra vonatkozó mondatokat! Az ábrán egy működésű szivattyú látható. Az betűk a szivattyú nyomócsonkjait, a betűk pedig
1. feladat Összesen 21 pont A) Egészítse ki az alábbi, B feladatrészben látható rajzra vonatkozó mondatokat! Az ábrán egy működésű szivattyú látható. Az betűk a szivattyú nyomócsonkjait, a betűk pedig
HELYI TANTERV. Mechanika
 HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
TR-800/2700 D CNC. A projekt az Európai Unió támogatásával, az Európai Regionális Fejlesztési Alap társfinanszírozásával valósult meg.
 TR-800/2700 D CNC GÖRGGÉP VASÚTI TENGELYEK FELKEMÉNYÍTÉSÉHEZ ÉS FELÜLETI MINSÉG JAVÍTÁSÁHOZ A projekt az Európai Unió támogatásával, az Európai Regionális Fejlesztési Alap társfinanszírozásával valósult
TR-800/2700 D CNC GÖRGGÉP VASÚTI TENGELYEK FELKEMÉNYÍTÉSÉHEZ ÉS FELÜLETI MINSÉG JAVÍTÁSÁHOZ A projekt az Európai Unió támogatásával, az Európai Regionális Fejlesztési Alap társfinanszírozásával valósult
Forgácsoló gyártócellák, gyártórendszerek 1.
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) Forgácsoló gyártócellák, gyártórendszerek 1. Forgácsoló gyártócellák, gyártórendszerek VÁZLAT 1. Forgácsoló gyártócellák, gyártórendszerek fogalma
A mechanikai alaptörvények ismerete
 A mechanikai alaptörvények ismerete Az oldalszám hivatkozások a Hudson-Nelson Útban a modern fizikához c. könyv megfelelő szakaszaira vonatkoznak. A Feladatgyűjtemény a Mérnöki fizika tárgy honlapjára
A mechanikai alaptörvények ismerete Az oldalszám hivatkozások a Hudson-Nelson Útban a modern fizikához c. könyv megfelelő szakaszaira vonatkoznak. A Feladatgyűjtemény a Mérnöki fizika tárgy honlapjára
Osztályozó, javító vizsga 9. évfolyam gimnázium. Írásbeli vizsgarész ELSŐ RÉSZ
 Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
1. TŰZOLTÓTECHNIKA KEZELŐI ALAPTANFOLYAM
 BM KATASZTRÓFAVÉDELMI OKTATÁSI KÖZPONT KÉPZÉSI PROGRAM TŰZOLTÓTECHNIKA KEZELŐI TANFOLYAMOK 1. TŰZOLTÓTECHNIKA KEZELŐI ALAPTANFOLYAM 2004. A TŰZOLTÓTECHNIKA KEZELŐI ALAPTANFOLYAM TANÍTÁSÁNAK CÉLJA ÉS FELADATAI
BM KATASZTRÓFAVÉDELMI OKTATÁSI KÖZPONT KÉPZÉSI PROGRAM TŰZOLTÓTECHNIKA KEZELŐI TANFOLYAMOK 1. TŰZOLTÓTECHNIKA KEZELŐI ALAPTANFOLYAM 2004. A TŰZOLTÓTECHNIKA KEZELŐI ALAPTANFOLYAM TANÍTÁSÁNAK CÉLJA ÉS FELADATAI
Elektromechanika. 4. mérés. Háromfázisú aszinkron motor vizsgálata. 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát.
 Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Elektromechanika 4. mérés Háromfázisú aszinkron motor vizsgálata 1. Rajzolja fel és értelmezze az aszinkron gép helyettesítő kapcsolási vázlatát. U 1 az állórész fázisfeszültségének vektora; I 1 az állórész
Kérdések Fizika112. Mozgás leírása gyorsuló koordinátarendszerben, folyadékok mechanikája, hullámok, termodinamika, elektrosztatika
 Kérdések Fizika112 Mozgás leírása gyorsuló koordinátarendszerben, folyadékok mechanikája, hullámok, termodinamika, elektrosztatika 1. Adjuk meg egy tömegpontra ható centrifugális erő nagyságát és irányát!
Kérdések Fizika112 Mozgás leírása gyorsuló koordinátarendszerben, folyadékok mechanikája, hullámok, termodinamika, elektrosztatika 1. Adjuk meg egy tömegpontra ható centrifugális erő nagyságát és irányát!
Energiahatékony erőcsomagok Magas teljesítményű préslégmotorok a magas forgatónyomaték eléréséhez, a legalacsonyabb levegő felhasználással
 Energiahatékony erőcsomagok Magas teljesítményű préslégmotorok a magas forgatónyomaték eléréséhez, a legalacsonyabb levegő felhasználással Masszív motorok extrém környezeti feltételekhez, a teljes leállásig
Energiahatékony erőcsomagok Magas teljesítményű préslégmotorok a magas forgatónyomaték eléréséhez, a legalacsonyabb levegő felhasználással Masszív motorok extrém környezeti feltételekhez, a teljes leállásig