5. 3D rekonstrukció. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (
|
|
|
- Benjámin Dobos
- 9 évvel ezelőtt
- Látták:
Átírás
1 5. 3D rekonstrukció Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (

2 2 PASSZÍV SZTEREÓ

3 3 Passzív sztereó 3D rekonstrukció egy sztereó kamera pár által rögzített képpárból Stereo rig: rögzített kamera pár egymáshoz képest fix pozícióban Mozgó objektum rekonstrukciója is lehetséges (nagyon gyors mozgás esetén a kamerák expozícióját szinkronizálni kell) Mozgó kamera: egyetlen kamerával két különböző pozícióból készített kép alapján Statikus objektum esetén használható Geometriailag mindkét konfiguráció azonos

4 4 Háromszögelés A rekonstrukció egyszerű háromszögeléssel oldható meg Az egymásnak megfelelő képpontok ugyanazon 3D pont képei a visszavetített képpontok vetítősugarainak metszéspontja adja a rekonstruált 3D pontot kalibrált kamera szükséges Algoritmus: 1. Pontmegfeleltetés 2. háromszögelés C C /

5 5 Diszparitás és mélység P(X,Y,Z) Standard szeteró konfiguráció esetén a diszparitás az x koordináták eltérése lesz: B Z xr Z f f x l x l B x r B Z f x l C l p l B Z x r p r C r Diszparitás: d=x l -x r Z f B d A diszparitás d és a mélység Z fordítottan arányosak és kalibrált kamera esetén egymésból számolhatók

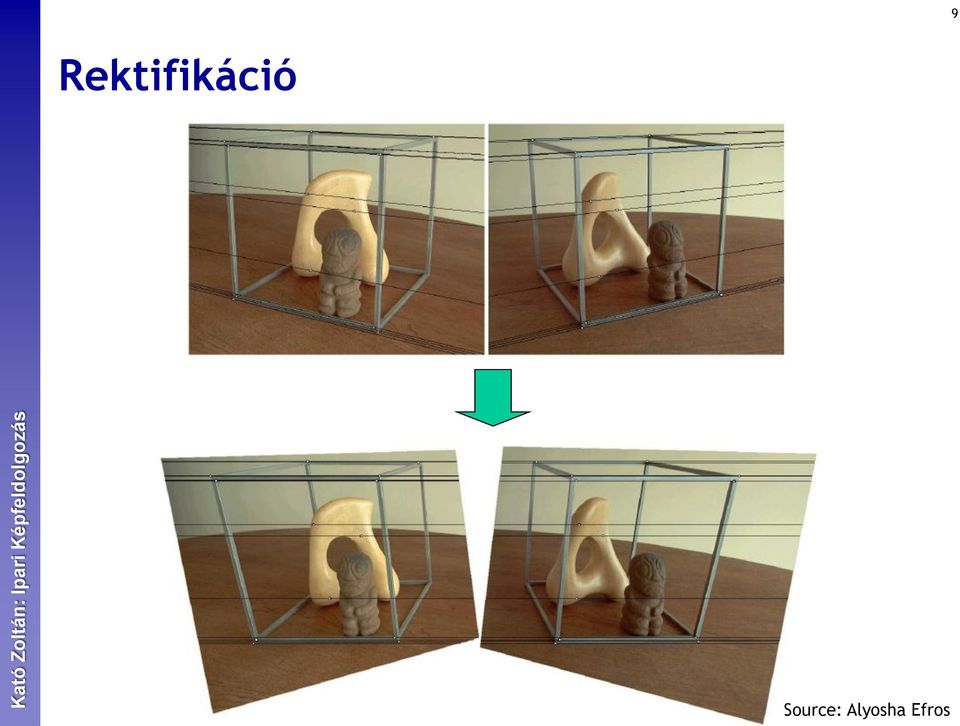
6 6 Általános sztereó kamerák esete Rektifikálás: vetítsük le a képeket egy közös képsíkra Epipoláris sík

7 7 Rektifikálás A vetítés egy H projektív transzformáció (síkhomográfia) lesz:

8 8 Rektifikálás A vetítés egy H projektív transzformáció (síkhomográfia) lesz:

9 9 Rektifikáció Source: Alyosha Efros
10 10 Sztereó megfeleltetés További megszorítások érvényesek egy sztereó képpár esetén: Egy x pont x párja az l epipoláris egyenesen van 1D keresés Ha a képsíkok egy síkba esnek (standard sztereó konfiguráció) a megfelelő pontok a képek azonos rasztersorain helyezkednek el Minden pontnak max. 1 párja lehet (takarás esetén nincs pár) Mélységi korlát korlátozott diszparitás (az epipoláris egyenes egy rövidebb szakaszára megszorítható a keresés)
 Mélységi korlát korlátozott diszparitás (az epipoláris egyenes egy")
11 11 Diszparitás térkép Bal kép I(x,y) Diszparitás térképd(x,y) Jobb kép I (x,y ) (x,y )=(x+d(x,y),y) Diszparitás térkép egyúttal a relatív mélységet is megadja mélységi térkép

12 12 HÁROMSZÖGELÉS

13 13 Háromszögelés problémái C C / A gyakorlatban a vetítősugarak nem metszik egymást Egyszerűen vehetjük a két egyenest összekötő legrövidebb szakasz felezőpontját Lehetséges hibaforrások (feltételezve a korrekt pontmegfeleltetést): x, x & F nem elégíti ki a x T Fx=0 egyenletet X nem elégíti ki egszerre az x=px és x =P X egyenleteket

14 14 Lehetséges hibák x PX x' P' X

15 15 Algebrai megoldás x PX x' P'X x P'X 0 x 3T 1T x p X p X 0 3T 2T y p X p X 0 2T p X 1T y p X 0 AX 0 A xp yp x' p' y' p' 3T 3T 3T p p p' p' 3T 1T 2T 1T 2T Az algebrai hiba minimalizálása nem garantálja a geometriai értelemben vett legjobb megoldást Előnye, hogy egyszerűen általánosítható több nézetre

16 16 Geometriai hiba Visszavetítési hiba minimalizálása geometriailag optimális megoldást ad Nemlineáris optimalizálás költségfüggvényeként használható Kezdeti érték az algebrai megoldásból (mindkét kameramátrixot kielégítő X-ből indul az optimalizáló)

17 17 Pontosság és sztereó látómező Bázistávolság növekedésével a látómező szűkül 3D pontosság nő (összenéző kamerák esetén is) Bázistávolság csökkenésével megfeleltetések egyszerűbbek, de bizonytalanabb 3D rekonstrukció Egy 3D pont bizonytalansága Sztereó látómező egy pixel Nem párhuzamos optikai tengelyek

18 18 AKTÍV SZTEREÓ

19 19 Aktív rekonstrukció Passzív sztereó: két kamera, adott megvilágítás Aktív sztereó: az egyik kamerát cseréljük le egy speciális fényforrásra Ismert mintázatot vetít A megfeleltetési problémát redukáljuk egy adott mintázat dekódolására a kamera képen


20 Zhang, Curless and Seitz, CVPR D sztereó (tér-idő)



21 21 Real-time színkód Komplex alakzatokra is működik Valós időben dinamikus alakzatokra is működik
22 22 Működési elv Adott fénymintát vetítünk az objektumra A kamera képén figyeljük meg a mintázat geometriai torzulását Ebből rekonstruáljuk a 3D objektumot
 Z0 = h = d*sin(β) Ismert b és α Adott kép koordináta u és fókusz f β számolható Ismert b, α, β d")
23 23 Egyetlen fénypont, 2D Koordináták meghatározása: β meghatározható a vetítési geometriából d = b*sin(α)/sin(α + β) X0 = d*cos(β) Z0 = h = d*sin(β) Ismert b és α Adott kép koordináta u és fókusz f β számolható Ismert b, α, β d számolható
*b*x)/(f + x*tan(a)) Y 0 = (tan(a)*b*y)/(f+x*tan(a)) Z 0 = (tan(a)*b*f)/(f+x*tan(a)) γ ismerete nem")
24 24 Egyetlen fénypont, 3D Koordináták meghatározhatók b, α, (x,y) kép koordináta és f fókusz ismeretében: X 0 = (tan(a)*b*x)/(f + x*tan(a)) Y 0 = (tan(a)*b*y)/(f+x*tan(a)) Z 0 = (tan(a)*b*f)/(f+x*tan(a)) γ ismerete nem szükséges
25 25 Fénycsík szkenner Fénysík Fényforrás (lézercsík) Kamera Felszín Fénycsík mozgatásával a felszín letapogatható Igen nagy pontosságú 3D rekonstrukció (akár 0,01 mm), de Sok képet kell készíteni időigényes Nem alkalmas mozgó objektumok leképezésére
26 26 Fénycsík szkenner háromszögelés Objektum Fénysík AX BY CZ D D d (távolság) Laser 0 Képpont ( x', y') f ' Camera Mélység a fénysík-vetítősugár metszéspontjából: Helyettesítsük be (X, Y)-t a sík egyenletébe és így megkapjuk Z-t X x' Z Y y' Z / / f ' f ' Z Df ' Ax' By' Cf '

27 27 (mélységi) Kalibráció Rögzített fénysík és kamera esetén egy kalibrációs síkot mozgatunk a fénysík mentén D0-ban a képsík bal oldali oszlopát világítjuk meg Dz-ben a képsík középső oszlopát Minden egyes oszlopra Dk-ból kapjuk a 3D mélységi adatot P

28 28 3D lézer szkenner
 Több csík több kép Egyetlen csík, több kép Egyetlen kép Lassú de robosztus Gyors de")
29 29 Hogyan gyorsítható a letapogatás Kevesebb képet készítsünk Statikus mintázat Kódolt mintázat (szürkeárnyalat/szín/idő) Több csík több kép Egyetlen csík, több kép Egyetlen kép Lassú de robosztus Gyors de nem robosztus

30 30 Több csíkból álló mintázat Egyszerre több fénysík, mindegyik egy adott α szögnek felel meg Kevesebb kép szükséges De melyik csík melyik szögnek felel meg?
31 31 Mintázat kódolás Egy (vonalak) és két (rács) tengely mentén kódolhatunk, ami meghatározza a rekonstrukciót is Dekódolás: a képpontoknak megfelelő mintázatbeli pontok beazonosítása (vagyis a megfeleltetés) Single-axis encoding Double-axis encoding Triangulation by line-to-plane intersection Triangulation by line-to-line intersection

![megvilágítási kódot [Posdamer 82]](/docs-images/26/9082708/images/32-0.jpg "Csíkok száma = m n : m szürkeérték,")
32 32 Időkódolt fénycsíkok Minden fénycsíkhoz rendeljünk egy egyedi megvilágítási kódot [Posdamer 82] Csíkok száma = m n : m szürkeérték, n kép Idő Tér

33 33 Bináris kódolás Example: 7 binary patterns proposed by Posdamer & Altschuler Időben egymás után vetítve Pattern 3 Pattern 2 Pattern 1 Pixel kódja: azonosítja a megfelelő csík-mintát
 csíkok: A mintázatokat könnyű")
34 34 Bináris kódolás Csak két megvilágítási szint (fekete=0, fehér=1) Minden képpontot az általa észlelt időbeli intenzitássorozat azonosít Gray kód használható a robosztussághoz: szomszédos csíkoknak csak 1 bitben kell különbözniük hibakorrekció lehetséges n minta szükséges 2 n csík kódolásához Általánosan használt mintázat: időben szélesedő (vagy keskenyedő) csíkok: A mintázatokat könnyű szegmentálni (nagy kontraszt) De sok mintázatot kell kivetíteni csak statikus objektumra használható
35 35 Gray kód Szomszédos csíkok egyetlen bitben különböznek


36 36 Bináris kódolás példa

37 37 Csíkok precíz szegmentálása + Szubpixeles pontosság hogyan érhető el? Inverz csíkok vetítése Intenzitásprofilok metszéspontja adja a csíkok szubpixeles határát
38 38 Több szintű kódolás Több intenzitásérték használatával csökenthető a képek száma Azonban a detektálás nehezebb 3 patterns based on a n-ary code of 4 grey levels (Horn & Kiryati) 64 encoded stripes
39 39 Gray kód + fázis eltolás Egy Gary kódsorozatot vetítünk az objektumra (3 kód 8 régió) 3 mintázat 8 régió Egy periódikus mintázatot (csíkok) vetítünk A régiók nélkül nem tudnánk megkülönböztetni az egyes csíkokat A periódikus mintázatot többször kivetítjük, mindig eltolva egy irányba shasonlóan egy lézer szkennerhez Gühring s line-shift technique Minden csík mindig ugyanabba a régióba esik
40 40 Struktúrált fény alapú eszközök: 3D szenner 3D lézerszkenner 3D laborban található Nextengine 2020i modell Makró módban 1mm pontosság kb. 3 perc szkennelési idő Forgóasztal+befogogó komplett 3D modell RGB kamera 3D felszín ÉS textúra.

41 41 Struktúrált fény alapú eszközök: Kinect Microsoft Kinect szenzor Mélységi térkép
42 42 Felhasznált anyagok Guido Gerig, CS 6320, 3D Computer Vision s06/lectures/ppts/lec-17.ppt S. Narasimhan CMU Marc Pollefeys UNC További források az egyes diákon megjelölve
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
Számítógépes látás alapjai
 Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 23 Rekonstrukció speciális hardverekkel
Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 23 Rekonstrukció speciális hardverekkel
Az intraorális lenyomatvételi eljárások matematikai, informatikai háttere. Passzív- és aktív háromszögelési módszer Időmérésen alapuló módszer
 Az intraorális lenyomatvételi eljárások matematikai, informatikai háttere Passzív- és aktív háromszögelési módszer Időmérésen alapuló módszer Papp Ildikó, DE-IK, 2017 Az intraorális lenyomatvételi eljárások
Az intraorális lenyomatvételi eljárások matematikai, informatikai háttere Passzív- és aktív háromszögelési módszer Időmérésen alapuló módszer Papp Ildikó, DE-IK, 2017 Az intraorális lenyomatvételi eljárások
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
2. Omnidirekcionális kamera
 2. Omnidirekcionális kamera Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Omnidirekcionális kamerák típusai Omnidirekcionális, körbelátó,
2. Omnidirekcionális kamera Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Omnidirekcionális kamerák típusai Omnidirekcionális, körbelátó,
3. Sztereó kamera. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 3. Sztereó kamera Kató Zoltá Képfeldolgozás és Számítógépes Grafika taszék SZTE (http://www.if.u-szeged.hu/~kato/teachig/) Sztereó kamerák Az emberi látást utáozza 3 Sztereó kamera pár Két, ugaazo 3D látvát
3. Sztereó kamera Kató Zoltá Képfeldolgozás és Számítógépes Grafika taszék SZTE (http://www.if.u-szeged.hu/~kato/teachig/) Sztereó kamerák Az emberi látást utáozza 3 Sztereó kamera pár Két, ugaazo 3D látvát
Tárgy. Forgóasztal. Lézer. Kamera 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL
 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
Bevezetés. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők?
 A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők? Vagyis mely képjellemzőket érdemes a vetületképekből kihámozni? Az attól függ Térbeli viszonyok egyenes méret párh. / szög alak síkok helyzete
A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők? Vagyis mely képjellemzőket érdemes a vetületképekből kihámozni? Az attól függ Térbeli viszonyok egyenes méret párh. / szög alak síkok helyzete
Transzformációk. Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform
 Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Kamerakalibráció és pozícióbecslés érzékenységi analízissel, sík mintázatokból. Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI)
, Fazekas Zoltán (MTA SZTAKI)") , 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
, 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
Automatikus irányzás digitális képek. feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA
 Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
8. Pontmegfeleltetések
 8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 2007/2008. tavaszi félév
 Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 007/008. tavaszi félév Józsa Csongor Konzulens: Dr. Vajda Ferenc 1/1 1. A probléma ismertetése Mobilis robotok ismeretlen
Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 007/008. tavaszi félév Józsa Csongor Konzulens: Dr. Vajda Ferenc 1/1 1. A probléma ismertetése Mobilis robotok ismeretlen
Számítási feladatok a Számítógépi geometria órához
 Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Transzformációk. Szécsi László
 Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
3D rekonstrukció több nézet alapján és alkalmazásai. Bódis-Szomorú András
 és alkalmazásai Tanszéki előadás, 2010 feb. 17 Méréstechnika és Információs Rendszerek Tanszék Budapesti Műszaki és Gazdaságtudományi Egyetem Tartalom 1. Felhasználási területek 2. Korábbi munkák 3. Vetítési
és alkalmazásai Tanszéki előadás, 2010 feb. 17 Méréstechnika és Információs Rendszerek Tanszék Budapesti Műszaki és Gazdaságtudományi Egyetem Tartalom 1. Felhasználási területek 2. Korábbi munkák 3. Vetítési
3. Szűrés képtérben. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 3. Szűrés képtérben Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Kép transzformációk típusai Kép értékkészletének radiometriai információ
3. Szűrés képtérben Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Kép transzformációk típusai Kép értékkészletének radiometriai információ
HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE
 HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE BEMUTATKOZÁS Hajder Levente (1975-?) Tanulmányok: BME első kísérlet 1993-1995 Kandó Kálmán Műszaki Főiskola (Ma: Óbudai Egyetem) 1995-1998 BME második,
HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE BEMUTATKOZÁS Hajder Levente (1975-?) Tanulmányok: BME első kísérlet 1993-1995 Kandó Kálmán Műszaki Főiskola (Ma: Óbudai Egyetem) 1995-1998 BME második,
Számítógépes látás. Kató Zoltán, Czúni László. 2011. május 2. 0:15
 Számítógépes látás Kató Zoltán, Czúni László 2011. május 2. 0:15 2 Tartalomjegyzék I. Statikus látás 7 1. A projektív kamera 11 1.1. A lyukkamera.............................. 11 1.1.1. A kamera koordináta
Számítógépes látás Kató Zoltán, Czúni László 2011. május 2. 0:15 2 Tartalomjegyzék I. Statikus látás 7 1. A projektív kamera 11 1.1. A lyukkamera.............................. 11 1.1.1. A kamera koordináta
Térbeli transzformációk, a tér leképezése síkra
 Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Loványi István vizsgakérdései kidolgozva (béta)
") Loványi István vizsgakérdései kidolgozva (béta) 1. Morfológiai képfeldolgozás elmélete 1. Alapvető halmazműveletek, tulajdonságaik Műveletek: egyesítés (unió) metszet negált összetett műveletek... Tulajdonságok:
Loványi István vizsgakérdései kidolgozva (béta) 1. Morfológiai képfeldolgozás elmélete 1. Alapvető halmazműveletek, tulajdonságaik Műveletek: egyesítés (unió) metszet negált összetett műveletek... Tulajdonságok:
Transzformációk síkon, térben
 Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Láthatósági kérdések
 Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Képfeldolgozás Szegmentálás Osztályozás Képfelismerés Térbeli rekonstrukció
 Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
8. előadás. Kúpszeletek
 8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
Egyenletek, egyenlőtlenségek grafikus megoldása TK. II. kötet 25. old. 3. feladat
 Egyenletek, egyenlőtlenségek grafikus megoldása TK. II. kötet. old.. feladat a. lépés: Az egyenlet bal oldalának ábrázolása függvényként.. lépés: Az egyenlet bal oldalának ábrázolása függvényként.. lépés:
Egyenletek, egyenlőtlenségek grafikus megoldása TK. II. kötet. old.. feladat a. lépés: Az egyenlet bal oldalának ábrázolása függvényként.. lépés: Az egyenlet bal oldalának ábrázolása függvényként.. lépés:
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
Többnézetes geometria
 Vizuális helymeghatározás Többnézetes geometria Plósz Sándor 1 1 Budapesti Műszaki és Gazdaságtudományi Egyetem Távközlési és Médiainformatikai Tanszék 2015 Plósz Sándor (BME TMIT) Navigációs szolgáltatások
Vizuális helymeghatározás Többnézetes geometria Plósz Sándor 1 1 Budapesti Műszaki és Gazdaságtudományi Egyetem Távközlési és Médiainformatikai Tanszék 2015 Plósz Sándor (BME TMIT) Navigációs szolgáltatások
1. ábra Egy terület DTM-je (balra) és ugyanazon terület DSM-je (jobbra)
 és ugyanazon terület DSM-je (jobbra)") Bevezetés A digitális terepmodell (DTM) a Föld felszínének digitális, 3D-ós reprezentációja. Az automatikus DTM előállítás folyamata jelenti egyrészt távérzékelt felvételekből a magassági adatok kinyerését,
Bevezetés A digitális terepmodell (DTM) a Föld felszínének digitális, 3D-ós reprezentációja. Az automatikus DTM előállítás folyamata jelenti egyrészt távérzékelt felvételekből a magassági adatok kinyerését,
Képrekonstrukció 3. előadás
 Képrekonstrukció 3. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Computed Tomography (CT) Elv: Röntgen-sugarak áthatolása 3D objektum 3D térfogati kép Mérések
Képrekonstrukció 3. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Computed Tomography (CT) Elv: Röntgen-sugarak áthatolása 3D objektum 3D térfogati kép Mérések
A tér lineáris leképezései síkra
 A tér lineáris leképezései síkra Az ábrázoló geometria célja: A háromdimenziós térben elhelyezkedő alakzatok helyzeti és metrikus viszonyainak egyértelmű és egyértelműen rekonstruálható módon történő ábrázolása
A tér lineáris leképezései síkra Az ábrázoló geometria célja: A háromdimenziós térben elhelyezkedő alakzatok helyzeti és metrikus viszonyainak egyértelmű és egyértelműen rekonstruálható módon történő ábrázolása
Koordináta-geometria feladatgyűjtemény
 Koordináta-geometria feladatgyűjtemény A feladatok megoldásai a dokumentum végén találhatók Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két csúcs
Koordináta-geometria feladatgyűjtemény A feladatok megoldásai a dokumentum végén találhatók Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két csúcs
Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján. Típusok: felügyelt és felügyelet nélküli tanuló eljárások
 Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján Típusok: felügyelt és felügyelet nélküli tanuló eljárások Különbség: előbbinél szükséges egy olyan tanulóhalmaz, ahol ismert a minták
Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján Típusok: felügyelt és felügyelet nélküli tanuló eljárások Különbség: előbbinél szükséges egy olyan tanulóhalmaz, ahol ismert a minták
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Matematika 11 Koordináta geometria. matematika és fizika szakos középiskolai tanár. > o < szeptember 27.
 Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Vizuális burok alapú 3D rekonstrukció fényforrás
 Vizuális burok alapú 3D rekonstrukció fényforrás képek használatával hajlított rugó idomok méréséhez Kátai-Urbán Gábor 1, Megyesi Zoltán 2 1 Kecskeméti Főiskola, GAMF Kar, Informatika Tanszék katai-urban.gabor@gamf.kefo.hu
Vizuális burok alapú 3D rekonstrukció fényforrás képek használatával hajlított rugó idomok méréséhez Kátai-Urbán Gábor 1, Megyesi Zoltán 2 1 Kecskeméti Főiskola, GAMF Kar, Informatika Tanszék katai-urban.gabor@gamf.kefo.hu
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag. Mátrix rangja
 VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
Számítógépes Grafika SZIE YMÉK
 Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Számítógépes grafika
 Számítógépes grafika XVII. rész A grafikai modellezés A modellezés A generatív számítógépes grafikában és a képfeldolgozás során nem a valódi objektumokat (valóságbeli tárgyakat), hanem azok egy modelljét
Számítógépes grafika XVII. rész A grafikai modellezés A modellezés A generatív számítógépes grafikában és a képfeldolgozás során nem a valódi objektumokat (valóságbeli tárgyakat), hanem azok egy modelljét
3D koordináta-rendszerek
 3D koordináta-rendszerek z z y x y x y balkezes bal-sodrású x jobbkezes jobb-sodrású z 3D transzformációk - homogén koordináták (x, y, z) megadása homogén koordinátákkal: (x, y, z, 1) (x, y, z, w) = (x,
3D koordináta-rendszerek z z y x y x y balkezes bal-sodrású x jobbkezes jobb-sodrású z 3D transzformációk - homogén koordináták (x, y, z) megadása homogén koordinátákkal: (x, y, z, 1) (x, y, z, w) = (x,
Nagy pontosságú 3D szkenner
 Tartalom T-model Komponensek Előzmények Know-how Fejlesztés Pilot projektek Felhasználási lehetőségek 1 T-model: nagy pontosságú aktív triangulációs 3D lézerszkenner A 3D szkennert valóságos tárgyak 3D
Tartalom T-model Komponensek Előzmények Know-how Fejlesztés Pilot projektek Felhasználási lehetőségek 1 T-model: nagy pontosságú aktív triangulációs 3D lézerszkenner A 3D szkennert valóságos tárgyak 3D
Fotogrammetriai munkaállomások szoftvermoduljainak tervezése. Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar
 Fotogrammetriai munkaállomások szoftvermoduljainak tervezése Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar Témakörök DPW szoftvermodulok Szoftverek funkciói Pár példa Mi hiányzik gyakran?
Fotogrammetriai munkaállomások szoftvermoduljainak tervezése Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar Témakörök DPW szoftvermodulok Szoftverek funkciói Pár példa Mi hiányzik gyakran?
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Koordinátageometriai gyakorló feladatok I ( vektorok )
") Koordinátageometriai gyakorló feladatok I ( vektorok./ Határozd meg az AB szakasznak azt a pontját, amely a szakaszt : ha A ( ; és a B ( ; 8!./ Adott az A ( 3 ; 5 és a ( ; 6 B pont. Számítsd ki az AB vektor
Koordinátageometriai gyakorló feladatok I ( vektorok./ Határozd meg az AB szakasznak azt a pontját, amely a szakaszt : ha A ( ; és a B ( ; 8!./ Adott az A ( 3 ; 5 és a ( ; 6 B pont. Számítsd ki az AB vektor
Grafikonok automatikus elemzése
 Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Nagy András. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 2010.
 Nagy András Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 010. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 1) Döntsd el, hogy a P pont illeszkedik-e az e egyenesre
Nagy András Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 010. Feladatok a koordináta-geometria, egyenesek témaköréhez 11. osztály 1) Döntsd el, hogy a P pont illeszkedik-e az e egyenesre
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Koordináta geometria III.
 Koordináta geometria III. TÉTEL: A P (x; y) pont akkor és csak akkor illeszkedik a K (u; v) középpontú r sugarú körre (körvonalra), ha (x u) 2 + (y v) 2 = r 2. Ez az összefüggés a K (u; v) középpontú r
Koordináta geometria III. TÉTEL: A P (x; y) pont akkor és csak akkor illeszkedik a K (u; v) középpontú r sugarú körre (körvonalra), ha (x u) 2 + (y v) 2 = r 2. Ez az összefüggés a K (u; v) középpontú r
Optikai méréstechnika alkalmazása járműipari mérésekben Kornis János
 Optikai méréstechnika alkalmazása járműipari mérésekben Kornis János PhD, okleveles villamosmérnök, Budapesti Műszaki és Gazdaságtudományi Egyetem Fizika Tanszék, kornis@phy.bme.hu Absztrakt: Az optikai
Optikai méréstechnika alkalmazása járműipari mérésekben Kornis János PhD, okleveles villamosmérnök, Budapesti Műszaki és Gazdaságtudományi Egyetem Fizika Tanszék, kornis@phy.bme.hu Absztrakt: Az optikai
Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán
 Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán MTA KFKI Részecske és Magfizikai Intézet, Biofizikai osztály Az egy adatsorra (idősorra) is alkalmazható módszerek Példa: Az epileptikus
Adatelemzési eljárások az idegrendszer kutatásban Somogyvári Zoltán MTA KFKI Részecske és Magfizikai Intézet, Biofizikai osztály Az egy adatsorra (idősorra) is alkalmazható módszerek Példa: Az epileptikus
Panorámakép készítése
 Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
Koordináta-geometria feladatok (középszint)
") Koordináta-geometria feladatok (középszint) 1. (KSZÉV Minta (1) 2004.05/I/4) Adott az A(2; 5) és B(1; 3) pont. Adja meg az AB szakasz felezőpontjának koordinátáit! 2. (KSZÉV Minta (2) 2004.05/I/7) Egy
Koordináta-geometria feladatok (középszint) 1. (KSZÉV Minta (1) 2004.05/I/4) Adott az A(2; 5) és B(1; 3) pont. Adja meg az AB szakasz felezőpontjának koordinátáit! 2. (KSZÉV Minta (2) 2004.05/I/7) Egy
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Geometria III.
 Geometria III.") Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Analitikus térgeometria
 Analitikus térgeometria Wettl Ferenc el adása alapján 2015.09.21. Wettl Ferenc el adása alapján Analitikus térgeometria 2015.09.21. 1 / 23 Tartalom 1 Egyenes és sík egyenlete Egyenes Sík 2 Alakzatok közös
Analitikus térgeometria Wettl Ferenc el adása alapján 2015.09.21. Wettl Ferenc el adása alapján Analitikus térgeometria 2015.09.21. 1 / 23 Tartalom 1 Egyenes és sík egyenlete Egyenes Sík 2 Alakzatok közös
Lin.Alg.Zh.1 feladatok
 LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Egyenes és sík. Wettl Ferenc szeptember 29. Wettl Ferenc () Egyenes és sík szeptember / 15
 Egyenes és sík szeptember / 15") Egyenes és sík Wettl Ferenc 2006. szeptember 29. Wettl Ferenc () Egyenes és sík 2006. szeptember 29. 1 / 15 Tartalom 1 Egyenes és szakasz Egyenes Szakasz Egyenesvonalú egyenletes mozgás Egyenes és pont
Egyenes és sík Wettl Ferenc 2006. szeptember 29. Wettl Ferenc () Egyenes és sík 2006. szeptember 29. 1 / 15 Tartalom 1 Egyenes és szakasz Egyenes Szakasz Egyenesvonalú egyenletes mozgás Egyenes és pont
Információ megjelenítés Számítógépes ábrázolás. Dr. Iványi Péter
 Információ megjelenítés Számítógépes ábrázolás Dr. Iványi Péter Raszterizáció OpenGL Mely pixelek vannak a primitíven belül fragment generálása minden ilyen pixelre Attribútumok (pl., szín) hozzárendelése
Információ megjelenítés Számítógépes ábrázolás Dr. Iványi Péter Raszterizáció OpenGL Mely pixelek vannak a primitíven belül fragment generálása minden ilyen pixelre Attribútumok (pl., szín) hozzárendelése
Alter Róbert Báró Csaba Sensor Technologies Kft
 Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Képfeldolgozás. 1. el adás. A képfeldolgozás m veletei. Mechatronikai mérnök szak BME, 2008
 Képfeldolgozás 1. el adás. A képfeldolgozás m veletei Mechatronikai mérnök szak BME, 2008 1 / 61 Alapfogalmak transzformációk Deníció Deníció Geometriai korrekciókra akkor van szükség, ha a képr l valódi
Képfeldolgozás 1. el adás. A képfeldolgozás m veletei Mechatronikai mérnök szak BME, 2008 1 / 61 Alapfogalmak transzformációk Deníció Deníció Geometriai korrekciókra akkor van szükség, ha a képr l valódi
Szendrői Balázs: Algebrai síkgörbék, szerkesztette: Ádám Liliána, Ódor Gergő, Lajos Mátyás
 Algebrai síkgörbék Algebrai síkgörbéknek az olyan görbéket nevezzük, amelyek pontjai egy kétváltozós polinommal jellemezhetők. Ilyenek az egyenesek (ezek az elsőfokú síkgörbék). Másodfokú síkgörbék: pl.
Algebrai síkgörbék Algebrai síkgörbéknek az olyan görbéket nevezzük, amelyek pontjai egy kétváltozós polinommal jellemezhetők. Ilyenek az egyenesek (ezek az elsőfokú síkgörbék). Másodfokú síkgörbék: pl.
1. Képalkotás. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 1. Képalkotás Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Képalkotás fizikai paraméterei Geometriai Vetítés típusa (perspectív) Kamera
1. Képalkotás Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Képalkotás fizikai paraméterei Geometriai Vetítés típusa (perspectív) Kamera
Lengyelné Dr. Szilágyi Szilvia április 7.
 ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
ME, Anaĺızis Tanszék 2010. április 7. , alapfogalmak 2.1. Definíció A H 1, H 2,..., H n R (ahol n 2 egész szám) nemüres valós számhalmazok H 1 H 2... H n Descartes-szorzatán a következő halmazt értjük:
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
Számítógépes geometria
 2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
Geometria II gyakorlatok
 Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2012. május 8. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Geometria II gyakorlatok Kovács Zoltán Copyright c 2011 Last Revision Date: 2012. május 8. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát technikával készült, a megjelenés
Koordináta-geometria alapozó feladatok
 Koordináta-geometria alapozó feladatok 1. Határozd meg az AB szakasz felezőpontját! (1,5 ; 3,5) (0,5 ; ) (6,5 ; 8,5) (4,5 ; ) (0,5 ; 1,5) (0 ; 0) (0 ; 8,5) (1 ; 1) ( 1,5 ; ) (3,5 ; 3) (0 ; 3) ( 1 ; 1,5).
Koordináta-geometria alapozó feladatok 1. Határozd meg az AB szakasz felezőpontját! (1,5 ; 3,5) (0,5 ; ) (6,5 ; 8,5) (4,5 ; ) (0,5 ; 1,5) (0 ; 0) (0 ; 8,5) (1 ; 1) ( 1,5 ; ) (3,5 ; 3) (0 ; 3) ( 1 ; 1,5).
2) = 0 ahol x 1 és x 2 az ax 2 + bx + c = 0 ( a,b, c R és a 0 )
 = 0 ahol x 1 és x 2 az ax 2 + bx + c = 0 ( a,b, c R és a 0 )") Fogalom gyűjtemény Abszcissza: az x tengely Abszolút értékes egyenletek: azok az egyenletek, amelyekben abszolút érték jel szerepel. Abszolútérték-függvény: egy elemi egyváltozós valós függvény, mely minden
Fogalom gyűjtemény Abszcissza: az x tengely Abszolút értékes egyenletek: azok az egyenletek, amelyekben abszolút érték jel szerepel. Abszolútérték-függvény: egy elemi egyváltozós valós függvény, mely minden
Űrfelvételek térinformatikai rendszerbe integrálása
 Budapest, 2005. október 18. Űrfelvételek térinformatikai rendszerbe integrálása Molnár Gábor ELTE Geofizikai Tanszék Űrkutató Csoport Témavezető: Dr. Ferencz Csaba Eötvös Loránd Tudományegyetem Geofizikai
Budapest, 2005. október 18. Űrfelvételek térinformatikai rendszerbe integrálása Molnár Gábor ELTE Geofizikai Tanszék Űrkutató Csoport Témavezető: Dr. Ferencz Csaba Eötvös Loránd Tudományegyetem Geofizikai
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Spektrográf elvi felépítése. B: maszk. A: távcső. Ø maszk. Rés Itt lencse, de általában komplex tükörrendszer
 Spektrográf elvi felépítése A: távcső Itt lencse, de általában komplex tükörrendszer Kis kromatikus aberráció fontos Leképezés a fókuszsíkban: sugarak itt metszik egymást B: maszk Fókuszsíkba kerül (kamera
Spektrográf elvi felépítése A: távcső Itt lencse, de általában komplex tükörrendszer Kis kromatikus aberráció fontos Leképezés a fókuszsíkban: sugarak itt metszik egymást B: maszk Fókuszsíkba kerül (kamera
Számítógépes látás alapjai
 Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 44 Többkamerás 3D-s rekonstrukció
Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 44 Többkamerás 3D-s rekonstrukció
Nem roncsoló tesztelés diszkrét tomográfiával
 Nem roncsoló tesztelés diszkrét tomográfiával Dr. Balázs Péter, adjunktus Képfeldolgozás és Számítógépes Grafika Tanszék SZTE TTIK, Informatikai Tanszékcsoport A teszteléshez használt CT berendezés lapdetektor
Nem roncsoló tesztelés diszkrét tomográfiával Dr. Balázs Péter, adjunktus Képfeldolgozás és Számítógépes Grafika Tanszék SZTE TTIK, Informatikai Tanszékcsoport A teszteléshez használt CT berendezés lapdetektor
Síkbeli egyenesek. 2. Egy egyenes az x = 1 4t, y = 2 + t parméteres egyenletekkel adott. Határozzuk meg
 Analitikus mértan 3. FELADATLAP Síkbeli egyenesek 1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az origón
Analitikus mértan 3. FELADATLAP Síkbeli egyenesek 1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az origón
Vektorok és koordinátageometria
 Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel. Az objektumok áthaladnak a többi objektumon
 Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
3D-s számítógépes geometria és alakzatrekonstrukció
 3D-s számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás,
3D-s számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás,
Lin.Alg.Zh.1 feladatok
 Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Koordináta-geometria feladatok (emelt szint)
") Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
10. Alakzatok és minták detektálása
 0. Alakzatok és mnták detektálása Kató Zoltán Képfeldolgozás és Számítógépes Grafka tanszék SZTE http://www.nf.u-szeged.hu/~kato/teachng/ 2 Hough transzformácó Éldetektálás során csak élpontok halmazát
0. Alakzatok és mnták detektálása Kató Zoltán Képfeldolgozás és Számítógépes Grafka tanszék SZTE http://www.nf.u-szeged.hu/~kato/teachng/ 2 Hough transzformácó Éldetektálás során csak élpontok halmazát
 Távérzékelés Távérzékelt felvételek értelmezése (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Távérzékelés Távérzékelt felvételek értelmezése (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
PONTFELHŐ REGISZTRÁCIÓ
 PONTFELHŐ REGISZTRÁCIÓ ITERATIVE CLOSEST POINT Cserteg Tamás, URLGNI, 2018.11.22. TARTALOM Röviden Alakzatrekonstrukció áttekintés ICP algoritmusok Projektfeladat Demó FORRÁSOK Cikkek Efficient Variants
PONTFELHŐ REGISZTRÁCIÓ ITERATIVE CLOSEST POINT Cserteg Tamás, URLGNI, 2018.11.22. TARTALOM Röviden Alakzatrekonstrukció áttekintés ICP algoritmusok Projektfeladat Demó FORRÁSOK Cikkek Efficient Variants
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő
 SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
Geometria. a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk)
") 1. Térelemek Geometria a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk) b. Def: félegyenes, szakasz, félsík, féltér. c. Kölcsönös helyzetük: i. pont és (egyenes vagy
1. Térelemek Geometria a. Alapfogalmak: pont, egyenes, vonal, sík, tér (Az alapfogalamakat nem definiáljuk) b. Def: félegyenes, szakasz, félsík, féltér. c. Kölcsönös helyzetük: i. pont és (egyenes vagy
7. Régió alapú szegmentálás
 Digitális képek szegmentálása 7. Régió alapú szegmentálás Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Szegmentálási kritériumok Particionáljuk a képet az alábbi kritériumokat kielégítő régiókba
Digitális képek szegmentálása 7. Régió alapú szegmentálás Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Szegmentálási kritériumok Particionáljuk a képet az alábbi kritériumokat kielégítő régiókba
Képrekonstrukció 9. előadás
 Képrekonstrukció 9. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem hv-konvex összefüggő halmazok Mag-burok-szerű rekonstrukció: S. Brunetti, A. Del Lungo, F.
Képrekonstrukció 9. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem hv-konvex összefüggő halmazok Mag-burok-szerű rekonstrukció: S. Brunetti, A. Del Lungo, F.
Hajder Levente 2018/2019. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Egyenes és sík. Wettl Ferenc Wettl Ferenc () Egyenes és sík / 16
 Egyenes és sík / 16") Egyenes és sík Wettl Ferenc 2012-09-20 Wettl Ferenc () Egyenes és sík 2012-09-20 1 / 16 Tartalom 1 Egyenes és szakasz Egyenes Szakasz Egyenesvonalú egyenletes mozgás Egyenes és pont távolsága 2 Sík Sík
Egyenes és sík Wettl Ferenc 2012-09-20 Wettl Ferenc () Egyenes és sík 2012-09-20 1 / 16 Tartalom 1 Egyenes és szakasz Egyenes Szakasz Egyenesvonalú egyenletes mozgás Egyenes és pont távolsága 2 Sík Sík
Érettségi feladatok Koordinátageometria_rendszerezve / 5
 Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
Hajder Levente 2014/2015. tavaszi félév
 Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
6. Éldetektálás. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 6. Éldetektálás Kató Zoltán Képeldolgozás és Számítógépes Graika tanszék SZTE (http://www.in.u-szeged.hu/~kato/teaching/) 2 Élek A képen ott található él, ahol a kép-üggvény hirtelen változik. A kép egy
6. Éldetektálás Kató Zoltán Képeldolgozás és Számítógépes Graika tanszék SZTE (http://www.in.u-szeged.hu/~kato/teaching/) 2 Élek A képen ott található él, ahol a kép-üggvény hirtelen változik. A kép egy
6. Modell illesztés, alakzatok
 6. Modell illesztés, alakzatok Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 ROBOSZTUS EGYENES ILLESZTÉS Egyenes illesztés Adott a síkban
6. Modell illesztés, alakzatok Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 ROBOSZTUS EGYENES ILLESZTÉS Egyenes illesztés Adott a síkban
Síklapú testek. Gúlák, hasábok Metszésük egyenessel, síkkal
 Síklapú testek Gúlák, hasábok Metszésük egyenessel, síkkal Az előadás átdolgozott részleteket tartalmaz a következőkből: Gubis Katalin: Ábrázoló geometria Vlasta Szirovicza: Descriptive geometry Síklapú
Síklapú testek Gúlák, hasábok Metszésük egyenessel, síkkal Az előadás átdolgozott részleteket tartalmaz a következőkből: Gubis Katalin: Ábrázoló geometria Vlasta Szirovicza: Descriptive geometry Síklapú
Mit lássunk élnek? Hol van az él? Milyen vastag legyen? Hol
 Textúra Könnyű az élt megtalálni? Mi lássunk élnek? Mit lássunk élnek? Hol van az él? Milyen vastag legyen? Mit lássunk élnek? Zaj A zajpontokat nem szabad az élpontokkal összekeverni Egy vagy két él?
Textúra Könnyű az élt megtalálni? Mi lássunk élnek? Mit lássunk élnek? Hol van az él? Milyen vastag legyen? Mit lássunk élnek? Zaj A zajpontokat nem szabad az élpontokkal összekeverni Egy vagy két él?
Navigáci. stervezés. Algoritmusok és alkalmazásaik. Osváth Róbert Sorbán Sámuel
 Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
9. előadás. Térbeli koordinátageometria
 9. előadás Térbeli koordinátageometria Koordinátageometria a térben Descartes-féle koordinátarendszerben dolgozunk. A legegyszerűbb alakzatokat fogjuk vizsgálni. Az ezeket leíró egyenletek első-, vagy
9. előadás Térbeli koordinátageometria Koordinátageometria a térben Descartes-féle koordinátarendszerben dolgozunk. A legegyszerűbb alakzatokat fogjuk vizsgálni. Az ezeket leíró egyenletek első-, vagy
Példák jellemzőkre: - minden pixelérték egy jellemző pl. neurális hálózat esetében csak kis képekre, nem invariáns sem a megvilágításra, sem a geom.
 Lépések 1. tanító és teszt halmaz összeállítása / megszerzése 2. jellemzők kinyerése 3. tanító eljárás választása Sok vagy kevés adat áll-e rendelkezésünkre? Mennyi tanítási idő/memória áll rendelkezésre?
Lépések 1. tanító és teszt halmaz összeállítása / megszerzése 2. jellemzők kinyerése 3. tanító eljárás választása Sok vagy kevés adat áll-e rendelkezésünkre? Mennyi tanítási idő/memória áll rendelkezésre?