3D rekonstrukció több nézet alapján és alkalmazásai. Bódis-Szomorú András
|
|
|
- Zsigmond Farkas
- 8 évvel ezelőtt
- Látták:
Átírás
1 és alkalmazásai Tanszéki előadás, 2010 feb. 17 Méréstechnika és Információs Rendszerek Tanszék Budapesti Műszaki és Gazdaságtudományi Egyetem

2 Tartalom 1. Felhasználási területek 2. Korábbi munkák 3. Vetítési modell és kalibráció 4. Sztereó rekonstrukció alapproblémái 5. Több nézet vagy mozgás 6. Rekonstrukció alaptétele/akadálya 7. További irányok 2/22

3 Területek / Orvosi 3D-képfeldolgozás INVAZÍV NON-INVAZÍV Tomográf / CTI Radioaktív / NRI Mágneses / MRI Ultrahang / USI Célok 1. Interaktív, dinamikus 3D-vizualizáció 2. Formák, textúrák, mozgás számszerűsítése 3. Anatómiai struktúrák identifikációja 4. 3D regisztráció (inter/intra-páciens, multimod.) 5. Terápia tervezés, szimuláció, döntés, irányítás Forrásképek I(x,y,k) pl. koponya vagy I(x,y,k,t) pl. szív Nicolas Ayache, Medical Computer Vision, Virtual Reality and Robotics Promising Reasearch Tracks, EPIDAURE Project, INRIA, Sophia-Antipolis, France, 1994 (BMVC, 1995). 3/22
 pl.")
4 Ipari alkalmazások / Gyártás, végellenőrzés Alkalmazások Mérések (tolerancia, statisztikák) Szűrés (pass/fail) 3D lokalizáció robotirányításhoz ISRA Vision 4/22

5 Területek / (Fél)autonóm járművek INTELLIGENS KÖZÚTI JÁRMŰVEK (IV, ADAS) IPARI RAKODÓ/SZÁLLÍTÓ ROBOTOK (AGV) AUTOMATED CART TRANSPORTER SZÁRAZFÖLDI ROBOTOK (NASA Mars Exploration Rover) (Predator RQ-1, USA légierő felderítője, 1995 óta) (URA Lab, IIS, Tokiói Egyetem) HEAD-UP DISPLAY (HUD) UTASSZÁLLÍTÓ REPÜLŐGÉP PILÓTASEGÍTŐ RENDSZER ENHANCED/SYNTHETIC VISION SYSTEM (EVS/SVS, HUD) LÉGI ROBOT (UAV, UCAV) TÁVIRÁNYÍTHATÓ LÉGI JÁRMŰ (RPV) AUTONÓM TENGERALATTJÁRÓK (AUV, UUV) TÁVIRÁNYÍTÁSOS TEGERALATTJÁRÓK (ROV) 5/22
 LÉGI ROBOT (UAV, UCAV) TÁVIRÁNYÍTHATÓ LÉGI JÁRMŰ (RPV) AUTONÓM TENGERALATTJÁRÓK (AUV, UUV) TÁVIRÁNYÍTÁSOS TEGERALATTJÁRÓK")
6 Területek / Filmipar és játékipar (AR/VR) Kibővített valóság (Augmented Reality, AR) az Avatar c. filmben Kibővített valóság az Én a robot c. filmben Pendulum Anim. Studio, AlterEgo division Virtuális valóság (Virtual Reality, VR) ImageMetrics Virtuális valóság 6/22
")
7 Területek / Reklám és sportkövetítések (AR/VR) Questec Tenisz HawkEye Innovations Snooker SportVision Virtuális felületek / játékoskártyák SportVision Amerikai foci overlay SportVision Virtuális kijelző LiberoVision Teljes 3D-rekonstrukció Pl. Virtuális lesvonal 7/22

8 Alkalmazási területek 3D orvosi képfeldolgozás, rekonstrukció Gyártás, végellenőrzés (Fél)autonóm járművek és pilótasegítő rendszerek Film- és játékipar (AR, VR) Reklám és sportközvetítések (AR, VR) Közúti és köztéri felügyeleti rendszerek Régészet, szobrok, műemlékek digitalizálása stb. 8/22

9 Korábbi munkák / Matlab toolbox MATLAB TOOLBOX: SAKKTÁBLÁS MATLAB TOOLBOX: SÁVDETEKTÁLÁSHOZ 9/22

10 Korábbi munkák / Cornea-rekonstrukció 10/22
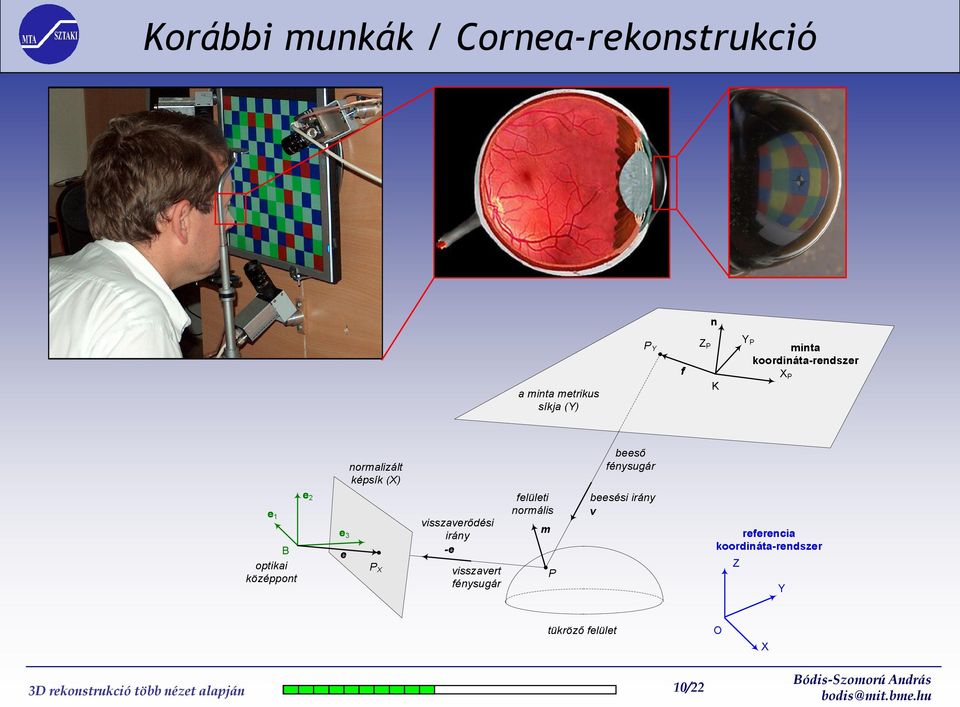
11 Korábbi munkák / Cornea-rekonstrukció Kísérlet műszaruhártyával A három kamera által elvileg látott és a rekonstruált felületek Sugárkövetéssel számított kép 11/22

12 Korábbi munkák / sztereó sávdetektálás HMI SZTEREÓ KAMERARENDSZER YAW-RATE ÉS GYORSULÁS előre néző kamerák nagy bázisszélesség HMI A FIGYELMEZTETÉSHEZ SEBESSÉG SZENZORFÚZIÓ EPAS A SÁVKÖVETÉSHEZ Valós időben laterális pozíció, jármű orientációja, sáv térbeli alakja. 12/22

13 Vetítési modell Megállapítások geometriai és algebrai algebrai modell kell külső és belső kamera paraméterek kalibráció információvesztés (mélység) több nézet vagy a priori info kell perspektív vetítés nemlináris projektív tér, homogén algebra 13/22

14 Rekonstrukció: Shape-from-X Rekonstrukció a fényforrás ismeretében / meghatározásával 3D lézer-szkenner Shape-from-Shading (SfS) Többnézetes rekonstrukció Computational Stereo SZTEREÓ MOZGÁS bázisvonal Structure-from-Motion (SfM) 14/22

15 Projektív rekonstrukciós alapprobléma Forrásadatok Rekonstrukció típusa Rektifikációhoz csak a képek képek, belső képek, belső, rel. külső képek, belső, absz. külső projektív (15 DoF) hasonlósági (7 DoF) euklidészi (6 DoF) valódi (true) Sztratifikáció Skálatényező Elforgatás,eltolás Valódi geometria 15 DoF projektív transzformáció Projektív rekonstrukció 15/22

16 Sztereó: parallaxis és diszparitás (Spirit Mars Exploration Rover anagliph 2004 jún. 8) (Oliver Wendel Holmes sztereogramja, 1860 Normann Rockwell festménye) 16/22
 (Oliver Wendel Holmes sztereogramja,")
17 Sztereó elrendezés geometriája Fundamentális mátrix Esszenciális mátrix 17/22

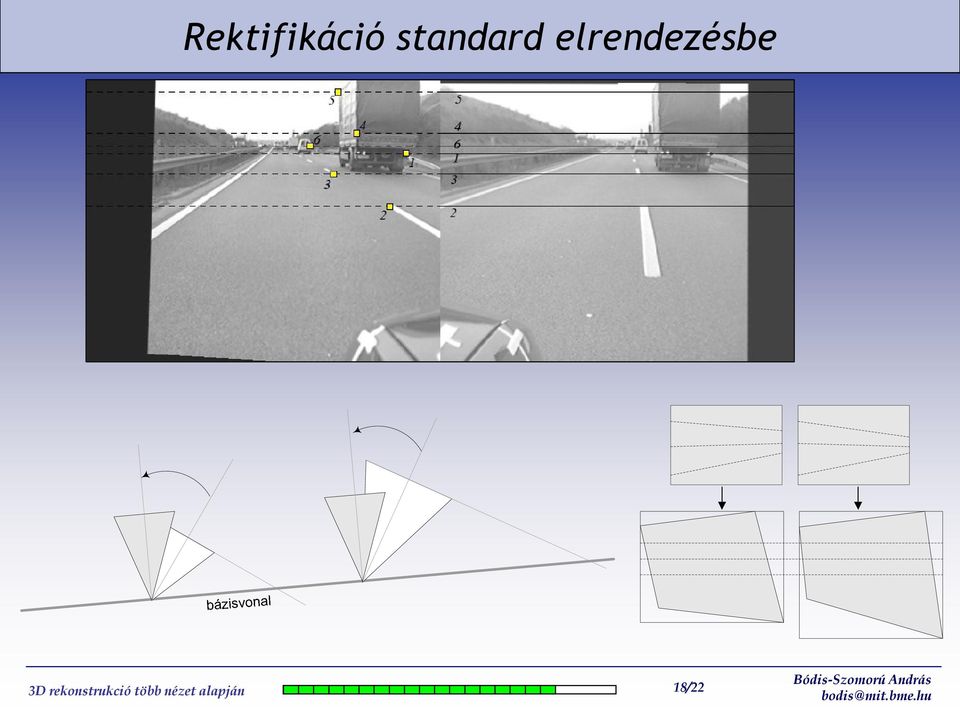
18 Rektifikáció standard elrendezésbe 18/22


19 Sztereó: ritka és sűrű mélységi képek számítása Lépések 1. Sarokdetektálás 2. Ritka megfeleltetés ritka diszparitás 3. Fundamentális mátrix számítása 4. Rektifikáció standard geometriára 5. Sűrű megfeleltetés (scanline mentén) 6. Konzisztenciateszt, validáció 7. Interpoláció (funkcionál min.) Sarokdetektálás Sűrű mélységi kép (szimuláció validációhoz) 19/22

20 Sűrű sztereó: a sanyarú valóság Eredeti képek egyike (szimulált) Referencia-diszparitáskép Blokk-illesztés Dinamikus programozás Maximum flow Graph cuts M. Z. Brown, D. Burschka, G. D. Hager, Advances in Computational Stereo, IEEE Trans. on Pattern Analysis and Machine Intelligence, 25(8): , /22



21 Mi a helyzet a mozgással / több nézettel? Mozgás Optikai mező módszerek Hagyományos rektifikáció nem jó Szereó diszparitás vs. optikai mező Szegmentálás: tyúk-tojás Több nézet Trifokális kényszerek gyakoriak Kvadrifokálison túl nem megyünk Gyakori a visszavezetés sztereóra Az új nézetek már kalibrálhatók Nagy optimalizálási feladat Sűrű rekonstrukció még sűrűbb lehet 21/22
22 Kutatás További tervek többnézetes implementációk (Matlab) sűrű mélységi képek (Matlab) dinamikus sztereó (sztereó+optikai mező) autokalibráció plussz szenzorokkal 22/22
23 Köszönöm a figyelmet! és alkalmazásai Tanszéki előadás, 2010 feb. 17 Méréstechnika és Információs Rendszerek Tanszék Budapesti Műszaki és Gazdaságtudományi Egyetem
Kamerakalibráció és pozícióbecslés érzékenységi analízissel, sík mintázatokból. Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI)
, Fazekas Zoltán (MTA SZTAKI)") , 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
, 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
Bevezetés. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT. Kovács László
 BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT Kovács László RÓLUNK - BME Építőmérnöki Kar (ÉMK) - 1782 Gépészmérnöki Kar (GPK) - 1871 Építészmérnöki Kar (ÉPK) - 1873 Vegyészmérnöki és Biomérnöki Kar (VBK) - 1873 Villamosmérnöki
BME IPAR 4.0 TECHNOLÓGIAI KÖZPONT Kovács László RÓLUNK - BME Építőmérnöki Kar (ÉMK) - 1782 Gépészmérnöki Kar (GPK) - 1871 Építészmérnöki Kar (ÉPK) - 1873 Vegyészmérnöki és Biomérnöki Kar (VBK) - 1873 Villamosmérnöki
Ember és robot együttműködése a gyártásban Ipar 4.0
 Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
Helyszín: MTA Székház, Felolvasóterem Időpont: 2017. November 7. Ember és robot együttműködése a gyártásban Ipar 4.0 Dr. Erdős Ferenc Gábor MTA SZTAKI Fejlett robotika ígérete A fejlett robotika és az
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
5. 3D rekonstrukció. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 5. 3D rekonstrukció Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 PASSZÍV SZTEREÓ 3 Passzív sztereó 3D rekonstrukció egy sztereó kamera
5. 3D rekonstrukció Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 PASSZÍV SZTEREÓ 3 Passzív sztereó 3D rekonstrukció egy sztereó kamera
Szenzorcsatolt robot: A szenzorcsatolás lépései:
 1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Érzékelők az autonóm járművekben
 Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
Érzékelők az autonóm járművekben Gáspár Péter Szirányi Tamás 1 Érzékelők Tartalom Motivációs háttér Környezetérzékelés célja Autóipari érzékelők Széria megoldások és ipari trendek 2 Motiváció: A járműipar
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése
 Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Beltéri autonóm négyrotoros helikopter szabályozó rendszerének kifejlesztése és hardware-in-the-loop tesztelése Regula Gergely, Lantos Béla BME Villamosmérnöki és Informatikai Kar Irányítástechnika és
Összeállította Horváth László egyetemi tanár
 Óbudai Egyetem Neumann János Informatikai Kar Intelligens Mérnöki Rendszerek Intézet Intelligens Mérnöki Rendszerek Szakirány a Mérnök informatikus alapszakon Összeállította Horváth László Budapest, 2011
Óbudai Egyetem Neumann János Informatikai Kar Intelligens Mérnöki Rendszerek Intézet Intelligens Mérnöki Rendszerek Szakirány a Mérnök informatikus alapszakon Összeállította Horváth László Budapest, 2011
SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA
 infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
infokommunikációs technológiák SZENZORFÚZIÓS ELJÁRÁSOK KIDOLGOZÁSA AUTONÓM JÁRMŰVEK PÁLYAKÖVETÉSÉRE ÉS IRÁNYÍTÁSÁRA BEVEZETŐ A KUTATÁS CÉLJA Autonóm járművek és robotok esetén elsődleges feladat a robotok
EEE Kutatólaboratórium MTA-SZTAKI Magyar Tudományos Akadémia
 DElosztott I S T R I B U T EEsemények D EV E N T S A NElemzé A L Y S I S se R E SKutatólaboratór E A R C H L A B O R A T Oium R Y L I D A R B a s e d S u r v e i l l a n c e Városi LIDAR adathalmaz szegmentációja
DElosztott I S T R I B U T EEsemények D EV E N T S A NElemzé A L Y S I S se R E SKutatólaboratór E A R C H L A B O R A T Oium R Y L I D A R B a s e d S u r v e i l l a n c e Városi LIDAR adathalmaz szegmentációja
Sztereó gépi látórendszer forgalmi sávok automatikus detektálásához és követéséhez
 Sztereó gépi látórendszer forgalmi sávok automatikus detektálásához és követéséhez Bódis-Szomorú András Virágh Bálint Wahl István Dr. Fazekas Zoltán Dr. Dabóczi Tamás A korszerű, gépjárművezetőt támogató
Sztereó gépi látórendszer forgalmi sávok automatikus detektálásához és követéséhez Bódis-Szomorú András Virágh Bálint Wahl István Dr. Fazekas Zoltán Dr. Dabóczi Tamás A korszerű, gépjárművezetőt támogató
VTOL UAV. Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára. Árvai László, Doktorandusz, ZMNE
 Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Inerciális mérőrendszer kiválasztása vezetőnélküli repülőeszközök számára Árvai László, Doktorandusz, ZMNE Tartalom Fejezet Témakör 1. Vezető nélküli repülőeszközök 2. Inerciális mérőrendszerek feladata
Alkalmazott matematikus mesterszak MINTATANTERV
 Alkalmazott matematikus mesterszak MINTATANTERV Tartalom A MESTERSZAK SZERKEZETE... 1 A KÉPZÉSI PROGRAM ÁTTEKINTŐ SÉMÁJA... 1 NAPPALI TAGOZAT... 2 ESTI TAGOZAT... 6 0BA mesterszak szerkezete Alapozó ismeretek
Alkalmazott matematikus mesterszak MINTATANTERV Tartalom A MESTERSZAK SZERKEZETE... 1 A KÉPZÉSI PROGRAM ÁTTEKINTŐ SÉMÁJA... 1 NAPPALI TAGOZAT... 2 ESTI TAGOZAT... 6 0BA mesterszak szerkezete Alapozó ismeretek
Kiterjesztett valóság (Augmented Reality) alkalmazási lehetősége a villamosenergia iparban
 alkalmazási lehetősége a villamosenergia iparban") Kiterjesztett valóság (Augmented Reality) alkalmazási lehetősége a villamosenergia iparban 2019.03.07. Hideg Attila Hideg.Attila@aut.bme.hu Mixed Reality Spectrum 2 Virtuális valóság Mixed Reality Spectrum
Kiterjesztett valóság (Augmented Reality) alkalmazási lehetősége a villamosenergia iparban 2019.03.07. Hideg Attila Hideg.Attila@aut.bme.hu Mixed Reality Spectrum 2 Virtuális valóság Mixed Reality Spectrum
Gyalogos elütések szimulációs vizsgálata
 Gyalogos elütések szimulációs vizsgálata A Virtual Crash program validációja Dr. Melegh Gábor BME Gépjárművek tanszék Budapest, Magyarország Vida Gábor BME Gépjárművek tanszék Budapest, Magyarország Ing.
Gyalogos elütések szimulációs vizsgálata A Virtual Crash program validációja Dr. Melegh Gábor BME Gépjárművek tanszék Budapest, Magyarország Vida Gábor BME Gépjárművek tanszék Budapest, Magyarország Ing.
Alter Róbert Báró Csaba Sensor Technologies Kft
 Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Autonóm - és hagyományos közúti járművek alkotta közlekedési rendszerek összehasonlító elemzése
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Záróvizsga 2017.06.20. Autonóm - és hagyományos közúti járművek alkotta közlekedési
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Közlekedés- és Járműirányítási Tanszék Záróvizsga 2017.06.20. Autonóm - és hagyományos közúti járművek alkotta közlekedési
FANUC Robotics Roboguide
 FANUC Robotics Roboguide 2010. február 9. Mi Mi az az a ROBOGUIDE Robot rendszer animációs eszköz ROBOGUIDE is an off-line eszköz a robot rendszer beállításához és karbantartásához ROBOGUIDE is an on-line
FANUC Robotics Roboguide 2010. február 9. Mi Mi az az a ROBOGUIDE Robot rendszer animációs eszköz ROBOGUIDE is an off-line eszköz a robot rendszer beállításához és karbantartásához ROBOGUIDE is an on-line
Kognitív Infokommunikáció: egy ébredő interdiszciplína. Baranyi Péter DSc
 Kognitív Infokommunikáció: egy ébredő interdiszciplína Baranyi Péter DSc Távközlési és Médiainformatika Tanszék, Budapesti Műszaki és Gazdaságtudományi Egyetem *** 3D Internet alapú Kontrol és Kommunikáció
Kognitív Infokommunikáció: egy ébredő interdiszciplína Baranyi Péter DSc Távközlési és Médiainformatika Tanszék, Budapesti Műszaki és Gazdaságtudományi Egyetem *** 3D Internet alapú Kontrol és Kommunikáció
ÓBUDAI EGYETEM KANDÓ KÁLMÁN VILLAMOSMÉRNÖKI KAR. Villamosmérnök szak
 2016/2017. tanév 1. félév 1. Matematika I. 42439/1. Vektorgeometria és lineáris algebra 2.900,- 42440 Analízis 3.900,- 1190 Matematika feladatok 3.220,- 2. Informatika I. 1186/I. Számítástechnika I. 2.200,-
2016/2017. tanév 1. félév 1. Matematika I. 42439/1. Vektorgeometria és lineáris algebra 2.900,- 42440 Analízis 3.900,- 1190 Matematika feladatok 3.220,- 2. Informatika I. 1186/I. Számítástechnika I. 2.200,-
Virtuális világ és a telemedicina lehetőségei. Forczek Erzsébet Orvosi Informatikai Intézet
 Virtuális világ és a telemedicina lehetőségei Forczek Erzsébet Orvosi Informatikai Intézet Feszty-körkép Képzelet és valóság 2012.03.22. virtuális - valós 2 Képzelet és valóság Modellalkotás (mikro, mezo,
Virtuális világ és a telemedicina lehetőségei Forczek Erzsébet Orvosi Informatikai Intézet Feszty-körkép Képzelet és valóság 2012.03.22. virtuális - valós 2 Képzelet és valóság Modellalkotás (mikro, mezo,
Transzformációk. Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform
 Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
OPTIKAI KÖVETK VETÉS. Steiner Henriette április 29.
 OPTIKAI KÖVETK VETÉS Lehetőségek és limitáci ciók Steiner Henriette 2009. április 29. MEGISMERÉS = Érzékelés + Fogalomalkotás MEGISMERÉS = Érzékelés + Fogalomalkotás LÁTÁS = SZEM + AGY MEGISMERÉS = Érzékelés
OPTIKAI KÖVETK VETÉS Lehetőségek és limitáci ciók Steiner Henriette 2009. április 29. MEGISMERÉS = Érzékelés + Fogalomalkotás MEGISMERÉS = Érzékelés + Fogalomalkotás LÁTÁS = SZEM + AGY MEGISMERÉS = Érzékelés
Számítógépes látás alapjai
 Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 44 Többkamerás 3D-s rekonstrukció
Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 44 Többkamerás 3D-s rekonstrukció
Felhők teljesítményelemzése felhő alapokon
 Felhők teljesítményelemzése felhő alapokon Kocsis Imre ikocsis@mit.bme.hu HTE Infokom 2014 Budapest University of Technology and Economics Department of Measurement and Information Systems 1 IT Szolgáltatásmenedzsment
Felhők teljesítményelemzése felhő alapokon Kocsis Imre ikocsis@mit.bme.hu HTE Infokom 2014 Budapest University of Technology and Economics Department of Measurement and Information Systems 1 IT Szolgáltatásmenedzsment
A digitális témahét program-tervezete
 A digitális témahét program-tervezete 1. LEGO Mindstorms robotikai bemutató Helyszín: 113. tanterem Vezeti: Deák Csaba 2. Elektronikai bemutató Helyszín: V3 tanterem Vezeti: Sándor Péter 3. Kiterjesztett
A digitális témahét program-tervezete 1. LEGO Mindstorms robotikai bemutató Helyszín: 113. tanterem Vezeti: Deák Csaba 2. Elektronikai bemutató Helyszín: V3 tanterem Vezeti: Sándor Péter 3. Kiterjesztett
Robottechnika. 1. Bevezetés. Ballagi Áron Automatizálási Tanszék
 Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Dr. Ballagi Áron tanszékvezető-helyettes, egyetemi docens Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
Robottechnika 1. Bevezetés Ballagi Áron Automatizálási Tanszék Bemutatkozás Dr. Ballagi Áron tanszékvezető-helyettes, egyetemi docens Automatizálási Tsz. C701, 3461 Autonóm és Intelligens Robotok Laboratórium
Gépészeti rendszertechnika (NGB_KV002_1)
") Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
Gépészeti rendszertechnika (NGB_KV002_1) 2. Óra Kőrös Péter Közúti és Vasúti Járművek Tanszék Tanszéki mérnök (IS201 vagy a tanszéken) E-mail: korosp@ga.sze.hu Web: http://www.sze.hu/~korosp http://www.sze.hu/~korosp/gepeszeti_rendszertechnika/
LEAN 4.0 azaz hogyan tudja a Lean menedzsment az Ipar 4.0-át támogatni és lehetőségeit kiaknázni.
 XXV. NEMZETI MINŐSÉGÜGYI KONFERENCIA LEAN 4.0 azaz hogyan tudja a Lean menedzsment az Ipar 4.0-át támogatni és lehetőségeit kiaknázni. Dr. Németh Balázs Kvalikon Kft. 2018. Szeptember 14. Termelő vállalat
XXV. NEMZETI MINŐSÉGÜGYI KONFERENCIA LEAN 4.0 azaz hogyan tudja a Lean menedzsment az Ipar 4.0-át támogatni és lehetőségeit kiaknázni. Dr. Németh Balázs Kvalikon Kft. 2018. Szeptember 14. Termelő vállalat
Forgalmi modellezés BMEKOKUM209
 BME Közlekedésüzemi és Közlekedésgazdasági Tanszék Forgalmi modellezés BMEKOKUM209 Szimulációs modellezés Dr. Juhász János A forgalmi modellezés célja A közlekedési igények bővülése és a motorizáció növekedése
BME Közlekedésüzemi és Közlekedésgazdasági Tanszék Forgalmi modellezés BMEKOKUM209 Szimulációs modellezés Dr. Juhász János A forgalmi modellezés célja A közlekedési igények bővülése és a motorizáció növekedése
Bevezetés. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Nagy pontosságú 3D szkenner
 Tartalom T-model Komponensek Előzmények Know-how Fejlesztés Pilot projektek Felhasználási lehetőségek 1 T-model: nagy pontosságú aktív triangulációs 3D lézerszkenner A 3D szkennert valóságos tárgyak 3D
Tartalom T-model Komponensek Előzmények Know-how Fejlesztés Pilot projektek Felhasználási lehetőségek 1 T-model: nagy pontosságú aktív triangulációs 3D lézerszkenner A 3D szkennert valóságos tárgyak 3D
Az automatizálás ergonómiája és az ergonómia automatizálása Siemens megoldásokkal. Molnár Zsolt vezető konzultáns, digitális gyártás graphit Kft.
 Az automatizálás ergonómiája és az ergonómia automatizálása Siemens megoldásokkal Molnár Zsolt vezető konzultáns, digitális gyártás graphit Kft. graphit Kft. - cégadatok 550+ 20+ PLM 850M Ipari felhasználó
Az automatizálás ergonómiája és az ergonómia automatizálása Siemens megoldásokkal Molnár Zsolt vezető konzultáns, digitális gyártás graphit Kft. graphit Kft. - cégadatok 550+ 20+ PLM 850M Ipari felhasználó
Intelligens hatlábú robot kinematikai vizsgálata
 Sályi István Gépészeti Tudományok Doktori Iskola Intelligens hatlábú robot kinematikai vizsgálata Füvesi Viktor I. éves doktorandusz Tel: +6-46-565111/1144 e-mail: elkfv@uni-miskolc.hu Témavezető: Dr.
Sályi István Gépészeti Tudományok Doktori Iskola Intelligens hatlábú robot kinematikai vizsgálata Füvesi Viktor I. éves doktorandusz Tel: +6-46-565111/1144 e-mail: elkfv@uni-miskolc.hu Témavezető: Dr.
Barnabás Takács, Ph.D. Digital Elite Inc., Los Angeles. Javacska Konferencia January 24, 2005
 Barnabás Takács, Ph.D. Digital Elite Inc., Los Angeles www.digitalelite.net Javacska Konferencia January 24, 2005 1. 1960: William Fetter (Boeing) computer graphics 2. 1970-80: CAD Design & Ergonomics
Barnabás Takács, Ph.D. Digital Elite Inc., Los Angeles www.digitalelite.net Javacska Konferencia January 24, 2005 1. 1960: William Fetter (Boeing) computer graphics 2. 1970-80: CAD Design & Ergonomics
Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 2007/2008. tavaszi félév
 Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 007/008. tavaszi félév Józsa Csongor Konzulens: Dr. Vajda Ferenc 1/1 1. A probléma ismertetése Mobilis robotok ismeretlen
Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 007/008. tavaszi félév Józsa Csongor Konzulens: Dr. Vajda Ferenc 1/1 1. A probléma ismertetése Mobilis robotok ismeretlen
Feladatok. Tervek alapján látvány terv készítése. Irodai munka Test modellezés. Létező objektum számítógépes modelljének elkészítése
 Virtuális valóság Feladatok Tervek alapján látvány terv készítése Irodai munka Test modellezés Létező objektum számítógépes modelljének elkészítése Geodéziai mérések Fotogrammetriai feldolgozás Egyszerű
Virtuális valóság Feladatok Tervek alapján látvány terv készítése Irodai munka Test modellezés Létező objektum számítógépes modelljének elkészítése Geodéziai mérések Fotogrammetriai feldolgozás Egyszerű
8. Pontmegfeleltetések
 8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
Transzformációk. Szécsi László
 Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
Számítógépes látás alapjai
 Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 23 Rekonstrukció speciális hardverekkel
Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 23 Rekonstrukció speciális hardverekkel
Takács Árpád K+F irányok
 Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
Takács Árpád K+F irányok 2016. 06. 09. arpad.takacs@adasworks.com A jövőre tervezünk Az AdasWorks mesterséges intelligencia alapú szoftverterfejlesztéssel és teljes önvezető megoldásokkal forradalmasítja
zlense: Mélység-alapú, valós idejű virtuális és kiterjesztett valóság adásgrafikai rendszer Koscsó Ferenc
 zlense: Mélység-alapú, valós idejű virtuális és kiterjesztett valóság adásgrafikai rendszer Best of Show Award AR VR 4k 8k ztrack Camera Tracking Subpixel accurate Depth map zlense zkey https://youtu.be/lotohllktaa
zlense: Mélység-alapú, valós idejű virtuális és kiterjesztett valóság adásgrafikai rendszer Best of Show Award AR VR 4k 8k ztrack Camera Tracking Subpixel accurate Depth map zlense zkey https://youtu.be/lotohllktaa
3. Sztereó kamera. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 3. Sztereó kamera Kató Zoltá Képfeldolgozás és Számítógépes Grafika taszék SZTE (http://www.if.u-szeged.hu/~kato/teachig/) Sztereó kamerák Az emberi látást utáozza 3 Sztereó kamera pár Két, ugaazo 3D látvát
3. Sztereó kamera Kató Zoltá Képfeldolgozás és Számítógépes Grafika taszék SZTE (http://www.if.u-szeged.hu/~kato/teachig/) Sztereó kamerák Az emberi látást utáozza 3 Sztereó kamera pár Két, ugaazo 3D látvát
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
CARE. Biztonságos. otthonok idős embereknek CARE. Biztonságos otthonok idős embereknek 2010-09-02. Dr. Vajda Ferenc Egyetemi docens
 CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
2. Omnidirekcionális kamera
 2. Omnidirekcionális kamera Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Omnidirekcionális kamerák típusai Omnidirekcionális, körbelátó,
2. Omnidirekcionális kamera Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Omnidirekcionális kamerák típusai Omnidirekcionális, körbelátó,
Autonóm járműrendszerek kutatása a zalaegerszegi autonóm tesztpályához kapcsolódóan. Pályázati témák (3) Téma rövid tartalma
 Téma rövid tartalma") Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
Pályázati témák (3) 1 Mesterséges intelligencia alapú döntési modellek fejlesztése és tesztelése valós autonóm járműves környezetben Szimulációs környezetben kifejlesztett döntési modellek vizsgálata valós
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ
 ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
ÉRZÉKELŐK ÉS BEAVATKOZÓK I. 0. TANTÁRGY ISMERTETŐ Dr. Soumelidis Alexandros 2018.09.06. BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG A tárgy célja
Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben
 Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben Lipics László r. őrnagy Kőszegi Rendőrkapitányság Határrendészeti Alosztályvezető 1 "We said why not get a jump start on the initiative
Robotjárművek alkalmazhatósága az integrált határbiztonsági rendszerben Lipics László r. őrnagy Kőszegi Rendőrkapitányság Határrendészeti Alosztályvezető 1 "We said why not get a jump start on the initiative
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
Hlinka József. Hlinka József, jozsef.hlinka@gjt.bme.hu
 Endoszkóp gyakorlat Jármű fenntartás BMEKOJJA 2014. Hlinka József Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Gépjárművek és Járműgyártás Tanszék 1111, Budapest,
Endoszkóp gyakorlat Jármű fenntartás BMEKOJJA 2014. Hlinka József Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Gépjárművek és Járműgyártás Tanszék 1111, Budapest,
Autonóm jármű forgalomszimulátorba illesztése
 Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
Autonóm jármű forgalomszimulátorba illesztése Szalai Mátyás 2018 Konzulens: Dr. Tettamanti Tamás A szimulációs feladat Miért hasznos? Biztonságos környezetben nyújt lehetőséget az autonóm járművek forgalmi
A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE
 A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE Dr. Bóna Krisztián egyetemi docens szakfelelős 10+3 GTK 10 ÉMK GPK 10+2 MŰEGYETEM 9+1 TTK Műegyetem
A LEAN FOLYAMATFEJLESZTŐ SZAKMÉRNÖK ÉS SPECIALISTA KÉPZÉS ILLESZKEDÉSE A BME KJK KÉPZÉSI RENDSZERÉBE Dr. Bóna Krisztián egyetemi docens szakfelelős 10+3 GTK 10 ÉMK GPK 10+2 MŰEGYETEM 9+1 TTK Műegyetem
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL
 SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések
 www.geodezia.hu Geodézia Zrt. 31. Vándorgyűlés Szekszárd, 2017. július 6-8. Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések Csörgits Péter Miről lesz szó? VONALAS
www.geodezia.hu Geodézia Zrt. 31. Vándorgyűlés Szekszárd, 2017. július 6-8. Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések Csörgits Péter Miről lesz szó? VONALAS
AUGMENTED REALITY KITERJESZTETT VALÓSÁG TARTALOMJEGYZÉK. Czéhner Tamás
 AUGMENTED REALITY KITERJESZTETT VALÓSÁG Czéhner Tamás A Kiterjesztett valóság (Augmented Reality röviden AR) napjaink egyik legdinamikusabban fejlődő kutatási területe. Az AR a valódi fizikai környezetet,
AUGMENTED REALITY KITERJESZTETT VALÓSÁG Czéhner Tamás A Kiterjesztett valóság (Augmented Reality röviden AR) napjaink egyik legdinamikusabban fejlődő kutatási területe. Az AR a valódi fizikai környezetet,
Röntgen-gamma spektrometria
 Röntgen-gamma spektrométer fejlesztése radioaktív anyagok elemi összetétele és izotópszelektív radioaktivitása egyidejű meghatározására Szalóki Imre, Gerényi Anita, Radócz Gábor Nukleáris Technikai Intézet
Röntgen-gamma spektrométer fejlesztése radioaktív anyagok elemi összetétele és izotópszelektív radioaktivitása egyidejű meghatározására Szalóki Imre, Gerényi Anita, Radócz Gábor Nukleáris Technikai Intézet
Térbeli transzformációk, a tér leképezése síkra
 Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Transzformációk síkon, térben
 Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Közúti forgalomszámlálás e_sensor rendszerrel. 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag)
") Közúti forgalomszámlálás e_sensor rendszerrel 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag) 1 Cégbemutató A Sensor Technologies Kft. videó analitikai rendszereket fejleszt budapesti székhellyel.
Közúti forgalomszámlálás e_sensor rendszerrel 2012.06.04 2012.06.10 Budapest dugódíj projekt (sajtóanyag) 1 Cégbemutató A Sensor Technologies Kft. videó analitikai rendszereket fejleszt budapesti székhellyel.
3D rekonstrukcióhoz. Megyesi Zoltán. Témavezető: Dr. Csetverikov Dmitrij. Informatikai Doktori Iskola Vezető: Dr.
 Sűrű illesztési módszerek széles bázistávolságú 3D rekonstrukcióhoz Megyesi Zoltán Doktori értekezés tézisei Témavezető: Dr. Csetverikov Dmitrij Eötvös Loránd Tudományegyetem Informatikai Doktori Iskola
Sűrű illesztési módszerek széles bázistávolságú 3D rekonstrukcióhoz Megyesi Zoltán Doktori értekezés tézisei Témavezető: Dr. Csetverikov Dmitrij Eötvös Loránd Tudományegyetem Informatikai Doktori Iskola
1. Mozgás Magyar Attila
 1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
Képrekonstrukció 3. előadás
 Képrekonstrukció 3. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Computed Tomography (CT) Elv: Röntgen-sugarak áthatolása 3D objektum 3D térfogati kép Mérések
Képrekonstrukció 3. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Computed Tomography (CT) Elv: Röntgen-sugarak áthatolása 3D objektum 3D térfogati kép Mérések
Valószínűségi modellellenőrzés Markov döntési folyamatokkal
 Valószínűségi modellellenőrzés Markov döntési folyamatokkal Hajdu Ákos Szoftver verifikáció és validáció 2015.12.09. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek
Valószínűségi modellellenőrzés Markov döntési folyamatokkal Hajdu Ákos Szoftver verifikáció és validáció 2015.12.09. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek
3D-s számítógépes geometria és alakzatrekonstrukció
 3D-s számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás,
3D-s számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás,
FoodManufuture FP7 projekt
 FoodManufuture FP7 projekt Virtuális és kibővített (augmented) valóság - Élelmiszeripari igények és alkalmazási lehetőségek dr. Sebők András Campden BRI Magyarország FoodManufuture workshop Budapest, Vidékfejlesztési
FoodManufuture FP7 projekt Virtuális és kibővített (augmented) valóság - Élelmiszeripari igények és alkalmazási lehetőségek dr. Sebők András Campden BRI Magyarország FoodManufuture workshop Budapest, Vidékfejlesztési
A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők?
 A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők? Vagyis mely képjellemzőket érdemes a vetületképekből kihámozni? Az attól függ Térbeli viszonyok egyenes méret párh. / szög alak síkok helyzete
A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők? Vagyis mely képjellemzőket érdemes a vetületképekből kihámozni? Az attól függ Térbeli viszonyok egyenes méret párh. / szög alak síkok helyzete
Rendszermodellezés. Modellellenőrzés. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék
 Rendszermodellezés Modellellenőrzés Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Ismétlés: Mire használunk modelleket? Kommunikáció, dokumentáció Gondolkodás,
Rendszermodellezés Modellellenőrzés Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Ismétlés: Mire használunk modelleket? Kommunikáció, dokumentáció Gondolkodás,
GYIK GYAKRAN ISMÉTELT KÉRDÉSEK
 GYIK GYAKRAN ISMÉTELT KÉRDÉSEK 1. Mi a pontos képzési program? A képzés megnevezése: Digitális Transzformáció és Ipar 4.0 alapképzés A képzés 2 db tananyagegységből/ modulból áll össze, melyek a következő
GYIK GYAKRAN ISMÉTELT KÉRDÉSEK 1. Mi a pontos képzési program? A képzés megnevezése: Digitális Transzformáció és Ipar 4.0 alapképzés A képzés 2 db tananyagegységből/ modulból áll össze, melyek a következő
Realisztikus 3D modellek készítése
 Realisztikus 3D modellek készítése valós tárgyakról Jankó Zsolt Doktori értekezés tézisei Témavezető: Dr. Csetverikov Dmitrij Eötvös Loránd Tudományegyetem Informatikai Doktori Iskola Vezető: Dr. Demetrovics
Realisztikus 3D modellek készítése valós tárgyakról Jankó Zsolt Doktori értekezés tézisei Témavezető: Dr. Csetverikov Dmitrij Eötvös Loránd Tudományegyetem Informatikai Doktori Iskola Vezető: Dr. Demetrovics
Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért
 Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
Új évtized, új kihívások a közlekedésbiztonságban közúti közlekedésbiztonsági konferencia Intelligens közlekedési rendszer alkalmazásokkal a közlekedésbiztonság javításáért Szűcs Lajos elnök ITS Hungary
7. Koordináta méréstechnika
 7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
ÓBUDAI EGYETEM KANDÓ KÁLMÁN VILLAMOSMÉRNÖKI KAR. Villamosmérnök szak
 2018/2019. tanév 2. félév 1. Matematika II. 42438 Valószínűség számítás és Mat. statisztika 2.500,- 2. Informatika labor I. Nincs kötelezően előírt jegyzet 3. Villamosipari Nincs kötelezően előírt jegyzet
2018/2019. tanév 2. félév 1. Matematika II. 42438 Valószínűség számítás és Mat. statisztika 2.500,- 2. Informatika labor I. Nincs kötelezően előírt jegyzet 3. Villamosipari Nincs kötelezően előírt jegyzet
A fotogrammetria ismeretek és a szakmai tudás fontossága
 Óbudai Egyetem Alba Regia Műszaki Kar Geoinformatikai Intézet A fotogrammetria ismeretek és a szakmai tudás fontossága 3. Légifotó Nap, Székesfehérvár, 2018. február 7. A fotogrammetria fogalma A fotogrammetria
Óbudai Egyetem Alba Regia Műszaki Kar Geoinformatikai Intézet A fotogrammetria ismeretek és a szakmai tudás fontossága 3. Légifotó Nap, Székesfehérvár, 2018. február 7. A fotogrammetria fogalma A fotogrammetria
A kibontakozó új hajtóerő a mesterséges intelligencia
 5. Magyar Jövő Internet Konferencia» Okos város a célkeresztben «A kibontakozó új hajtóerő a mesterséges intelligencia Dr. Szűcs Gábor Budapesti Műszaki és Gazdaságtudományi Egyetem Távközlési és Médiainformatikai
5. Magyar Jövő Internet Konferencia» Okos város a célkeresztben «A kibontakozó új hajtóerő a mesterséges intelligencia Dr. Szűcs Gábor Budapesti Műszaki és Gazdaságtudományi Egyetem Távközlési és Médiainformatikai
Élpont osztályozáson alapuló robusztus tekintetkövetés
 KÉPFELDOLGOZÁS Élpont osztályozáson alapuló robusztus tekintetkövetés HELFENBEIN TAMÁS Ipari Kommunikációs Technológiai Intézet, Bay Zoltán Alkalmazott Kutatási Közalapítvány helfenbein@ikti.hu Lektorált
KÉPFELDOLGOZÁS Élpont osztályozáson alapuló robusztus tekintetkövetés HELFENBEIN TAMÁS Ipari Kommunikációs Technológiai Intézet, Bay Zoltán Alkalmazott Kutatási Közalapítvány helfenbein@ikti.hu Lektorált
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Matlab Fuzzy Logic Toolbox
 Matlab Fuzzy Logic Toolbox The Future looks Fuzzy Newsweek, May, 28, 1990. A fuzzy irányítási rendszerek vizsgálatára Windows alatt futó Matlab programcsomag szimulációs eszközeit és a Matlab-ra ráépülő
Matlab Fuzzy Logic Toolbox The Future looks Fuzzy Newsweek, May, 28, 1990. A fuzzy irányítási rendszerek vizsgálatára Windows alatt futó Matlab programcsomag szimulációs eszközeit és a Matlab-ra ráépülő
A 3D mozgáselemző rendszer és alkalmazásának lehetőségei. Dr. Béres Sándor PhD főiskolai docens SZTE JGYPK TSTI
 A 3D mozgáselemző rendszer és alkalmazásának lehetőségei Dr. Béres Sándor PhD főiskolai docens SZTE JGYPK TSTI A 3D mozgáselemzés A teljesítményfokozás talán leghatékonyabb legális, kutatók, edzők, oktatók
A 3D mozgáselemző rendszer és alkalmazásának lehetőségei Dr. Béres Sándor PhD főiskolai docens SZTE JGYPK TSTI A 3D mozgáselemzés A teljesítményfokozás talán leghatékonyabb legális, kutatók, edzők, oktatók
Mechatronika segédlet 10. gyakorlat
 Mechatronika segédlet 10. gyakorlat 2017. április 21. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 1 simrobot... 2 Paraméterei... 2 Visszatérési értéke... 2 Kód... 2 simrobotmdl... 3 robotsen.mdl...
Mechatronika segédlet 10. gyakorlat 2017. április 21. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 1 simrobot... 2 Paraméterei... 2 Visszatérési értéke... 2 Kód... 2 simrobotmdl... 3 robotsen.mdl...
Győri HPC kutatások és alkalmazások
 Győri HPC kutatások és alkalmazások dr. Horváth Zoltán dr. Környei László Fülep Dávid Széchenyi István Egyetem Matema5ka és Számítástudomány Tanszék 1 HPC szimulációk az iparban Feladat: Rába- futómű terhelés
Győri HPC kutatások és alkalmazások dr. Horváth Zoltán dr. Környei László Fülep Dávid Széchenyi István Egyetem Matema5ka és Számítástudomány Tanszék 1 HPC szimulációk az iparban Feladat: Rába- futómű terhelés
GIS Open D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER
 GIS Open 2017 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. Célkitűzésünk Trimble
GIS Open 2017 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10 Minden az EGYben PREMIER 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. 3D Geosolutions Hungary Kft. Célkitűzésünk Trimble
Hálózatba kapcsolt gyártósor i4.0
 Bosch Rexroth Kft. The Drive & Control Company 1103 Budapest, Gyömrői út 104. Telefon: +36-1/422-3200 Fax: +36-1/422-3201 E-mail: sales@boschrexroth.hu www.boschrexroth.com/hu/hu/ Hálózatba kapcsolt gyártósor
Bosch Rexroth Kft. The Drive & Control Company 1103 Budapest, Gyömrői út 104. Telefon: +36-1/422-3200 Fax: +36-1/422-3201 E-mail: sales@boschrexroth.hu www.boschrexroth.com/hu/hu/ Hálózatba kapcsolt gyártósor
Diplomamunkám felépítése
 Üregek távolhatása gránitos kőzetkörnyezetben Tóth Szilvia Konzulensek: Dr. Török Ákos, BME Építőanyagok és Mérnökgeológia Tanszék Poromb Péter, Mott MacDonald Magyarország Kft. Diplomamunkám felépítése
Üregek távolhatása gránitos kőzetkörnyezetben Tóth Szilvia Konzulensek: Dr. Török Ákos, BME Építőanyagok és Mérnökgeológia Tanszék Poromb Péter, Mott MacDonald Magyarország Kft. Diplomamunkám felépítése
Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány. Verőné Dr. Wojtaszek Malgorzata
 Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány Verőné Dr. Wojtaszek Malgorzata Az előadás felépítése Trendek a Föld megfigyelésében (hol kezdődött, merre tart ) Távérzékelés
Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány Verőné Dr. Wojtaszek Malgorzata Az előadás felépítése Trendek a Föld megfigyelésében (hol kezdődött, merre tart ) Távérzékelés
ÓBUDAI EGYETEM KANDÓ KÁLMÁN VILLAMOSMÉRNÖKI KAR. Villamosmérnök szak
 I EGYETEM 2017/2018. tanév 2. félév 1. Matematika II. 42438 Valószínűségszámítás és Mat. Statisztika 2.500,- 2. Informatika I. labor Nincs kötelezően előírt jegyzet 3. Villamosipari Nincs kötelezően előírt
I EGYETEM 2017/2018. tanév 2. félév 1. Matematika II. 42438 Valószínűségszámítás és Mat. Statisztika 2.500,- 2. Informatika I. labor Nincs kötelezően előírt jegyzet 3. Villamosipari Nincs kötelezően előírt
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN
 Dr. Molnár András - Stojcsics Dániel HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN Bevezető Pilóta nélküli robotrepülőgéppel végzett kutatás és fejlesztés elengedhetetlen része a tesztelés. Az időjárási feltételek
Dr. Molnár András - Stojcsics Dániel HIL SZIMULÁCIÓ ROBOTPILÓTA FEJLESZTÉSBEN Bevezető Pilóta nélküli robotrepülőgéppel végzett kutatás és fejlesztés elengedhetetlen része a tesztelés. Az időjárási feltételek
VÁNDORGYŰLÉS július 6-8.
 MFTTT, 31. VÁNDORGYŰLÉS 2017. július 6-8. Az új technológiák és a szervezeti változások hatása a magyar földmérésre és térképészetre 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10: az IGAZI FÚZIÓ!
MFTTT, 31. VÁNDORGYŰLÉS 2017. július 6-8. Az új technológiák és a szervezeti változások hatása a magyar földmérésre és térképészetre 3D GEOSOLUTIONS HUNGARY KFT Váradi Attila: Trimble SX10: az IGAZI FÚZIÓ!
BME HDS CFD Tanszéki beszámoló
 BME HDS CFD Tanszéki beszámoló Hős Csaba csaba.hos@hds.bme.hu Budapesti Műszaki és Gazdaságtudományi Egyetem CFD Workshop, 2007. június 20. p.1/16 Áttekintés Nyíltfelszínű áramlások Csatornaáramlások,
BME HDS CFD Tanszéki beszámoló Hős Csaba csaba.hos@hds.bme.hu Budapesti Műszaki és Gazdaságtudományi Egyetem CFD Workshop, 2007. június 20. p.1/16 Áttekintés Nyíltfelszínű áramlások Csatornaáramlások,
Mesterséges intelligencia az önvezető autók világában. Takács Árpád. arpad.takacs@adasworks.com
 Mesterséges intelligencia az önvezető autók világában Takács Árpád arpad.takacs@adasworks.com I. Commsignia BME HIT autonóm járműtechnológiák workshop, Budapest, 2016. május 11. Rólunk Automatizált vezetés
Mesterséges intelligencia az önvezető autók világában Takács Árpád arpad.takacs@adasworks.com I. Commsignia BME HIT autonóm járműtechnológiák workshop, Budapest, 2016. május 11. Rólunk Automatizált vezetés
Nem roncsoló tesztelés diszkrét tomográfiával
 Nem roncsoló tesztelés diszkrét tomográfiával Dr. Balázs Péter, adjunktus Képfeldolgozás és Számítógépes Grafika Tanszék SZTE TTIK, Informatikai Tanszékcsoport A teszteléshez használt CT berendezés lapdetektor
Nem roncsoló tesztelés diszkrét tomográfiával Dr. Balázs Péter, adjunktus Képfeldolgozás és Számítógépes Grafika Tanszék SZTE TTIK, Informatikai Tanszékcsoport A teszteléshez használt CT berendezés lapdetektor
Fotogrammetriai munkaállomások szoftvermoduljainak tervezése. Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar
 Fotogrammetriai munkaállomások szoftvermoduljainak tervezése Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar Témakörök DPW szoftvermodulok Szoftverek funkciói Pár példa Mi hiányzik gyakran?
Fotogrammetriai munkaállomások szoftvermoduljainak tervezése Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar Témakörök DPW szoftvermodulok Szoftverek funkciói Pár példa Mi hiányzik gyakran?
1. Az informatika alapjai (vezetője: Dr. Dömösi Pál, DSc, egyetemi tanár) Kredit
 Kredit") 2. MELLÉKLET Az oktatási koncepciója 1. Az informatika alapjai (vezetője: Dr. Dömösi Pál, DSc, egyetemi tanár) Az informatika alapjai Tud. Min. 1 Automata hálózatok 2 V Dr. Dömösi Pál DSc 2 Automaták és
2. MELLÉKLET Az oktatási koncepciója 1. Az informatika alapjai (vezetője: Dr. Dömösi Pál, DSc, egyetemi tanár) Az informatika alapjai Tud. Min. 1 Automata hálózatok 2 V Dr. Dömösi Pál DSc 2 Automaták és
fluoreszcenciás mikroszkóp képeken
 Élősejt szegmentálása gráfvágás segítségével fluoreszcenciás mikroszkóp képeken Leskó Milán 1, Kató Zoltán 1, Nagy Antal 1, Gombos Imre 2, Török Zsolt 2, ifj. Vígh László 2, Vígh László 2 1 Képfeldolgozás
Élősejt szegmentálása gráfvágás segítségével fluoreszcenciás mikroszkóp képeken Leskó Milán 1, Kató Zoltán 1, Nagy Antal 1, Gombos Imre 2, Török Zsolt 2, ifj. Vígh László 2, Vígh László 2 1 Képfeldolgozás
 Távérzékelés Analóg felvételek feldolgozása (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Távérzékelés Analóg felvételek feldolgozása (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési