Affin Puzzle: Deformált objektumdarabok
|
|
|
- Andrea Boros
- 6 évvel ezelőtt
- Látták:
Átírás
1 Affin Puzzle: Deformált objektumdarabok helyreállítása megfeleltetések nélkül Domokos Csaba 1, Kató Zoltán 2 1 dcs@inf.u-szeged.hu 2 Képfeldolgozás és Számtógépes Grafika Tanszék, Szegedi Tudományegyetem kato@inf.u-szeged.hu Kivonat Ebben a cikkben törött objektumok helyreállításának problémájával foglalkozunk. Az eredeti objektum és annak törött darabjai között lineáris transzformációkat feltételezünk, és a javasolt módszert 2D és 3D affin transzformációkon keresztül mutatjuk be. A módszerünk alapötlete, hogy egy polinom egyenletrendszert írunk fel, melynek megoldása megadja az illesztés ismeretlen paramétereit. A javasolt algoritmust nagyméretű, két- és háromdimenziós képeket tartalmazó szintetikus adatbázison teszteltük. Az eredmények mutatják, hogy a módszer jó eredményeket szolgáltat, illetve robusztus a szegmentálási hibákkal szemben. Bemutatunk továbbá néhány 2D valós képen kapott eredményt, illetve olyan eredményeket, melyeket műtéti tervezés során használt 3D orvosi képek esetén kaptunk. 1. Bevezető Ebben a cikkben törött objektumok helyreállításának problémájával foglalkozunk. Megjegyezzük, hogy a cikkben szereplő eredményeket[1]-ben már korábban publikáltuk. A feladat puzzle néven is ismert, mely nemcsak elméleti szempontból érdekes [2,3], hanem számos alkalmazási területe van, mint például az archeológia [4] vagy az orvosi képfeldolgozás [5] (pl. törött csontok helyreállítása [6,7,8]). A feladat a következőképpen fogalmazható meg: Adott egy bináris kép (sablon) és egy másik bináris kép (megfigyelés), mely a sablon képen lévő objektum törött darabjait tartalmazza. Célunk annak a geometriai transzformációnak a meghatározása, mely a törött darabokat a sablon képen lévő eredeti helyükre illeszti. A globális deformáció egy nemlineáris transzformáció a következő megszorításokkal: 1) az objektum részei egymástól el vannak szeparálva (például szegmentálás által vagy diszjunktak), 2) a sablon kép összes törött darabja ismert, de 3) mindegyikre különböző affin transzformáció hat. Alakzatok parciális illesztése [9,10,11] hasonló probléma. Ekkor két (általában) különböző alakzat esetén azt a transzformációt keressük, melyet az egyik alakzatra alkalmazva a két alakzat közös része fedésbe kerül. Ez a klasszikus A cikk eredményei az alábbi publikációban jelentek meg: Csaba Domokos and Zoltan Kato: Affine puzzle: Realigning deformed object fragments without correspondences. In Proceedings of European Conference on Computer Vision (2010)
2 Affin Puzzle: Törött objektumok helyreállítása megfeleltetések nélkül 207 alakzatillesztés egy különösen nehéz részterülete. Ebben az értelemben, a feladatunk tekinthető úgy is, mint a sablon és a megfigyelés darabjainak parciális illesztése. A jelenlegi megközelítések főként a Laplace-Beltrami keretrendszeren [12,11] alapulnak, de a klasszikus megközelítések, mint például az Iterative Closest Point (ICP) algoritmus [13] is használható alkalmas alakzat reprezentációt feltételezve [9]. Ezen algoritmusok meglehetősen nagy számításigénye miatt, ez a fajta megoldás nem optimális a problémánk esetén. Egy másik kapcsolódó probléma nemlineáris torzulások lineáris transzformációkkal való szakaszonkénti közelítése. [14]-ben a torzulást lokálisan affin transzformációkkal modellezik, mely egy globálisan sima deformációt eredményez, és az intenzitások lokális és globális változását is figyelembe veszi. A feladat klasszikus megoldása[15] során a képek között pontmegfeleltetéseket detektálnak, majd ezután egy (általában eléggé műveletigényes) optimalizálási eljárás segítségével vagy egy egyenletrendszer megoldásával kapják a deformáció ismeretlen paramétereit. Viszont a képek között megbízható pontmegfeleltetéseket találni már önmagában bonyolult feladat. A puzzle feladat legtöbb megoldása során [2,3,4] szomszédos darabokat próbálnak illeszteni, majd ezen párosításokat felhasználva az eredeti objektumot merevtest transzformációkkal állítják elő. Kong és Kimia [2] egy olyan 2D görbeillesztésen alapuló technikát javasolt, mely a puzzle darabjainak geometriai tulajdonságát használja fel. A megoldást úgy kapják, hogy a legjobbat először keresési stratégia alapján az objektum darabjait háromszögekre bontva, azokat rekurzív módon csoportosítják. Ez a módszer kiterjeszthető például lézer szkennerrel letapogatott 3D darabokra is. Ekkor a 2D görbeillesztésen alapuló módszer általánosításával kapott eljárás segítségével állíthatók vissza az egyes darabok az eredeti helyükre. Papaioannou és tsai. 3D objektumok rekonstrukciójának problémáját tekintik, ahol az egyes darabok felszínének geometriáját használják ki, továbbá feltételezik, hogy nem áll rendelkezésre semmilyen információ a végső rekonstruálandó modellel kapcsolatban [3]. A módszer alapötlete, hogy két háromdimenziós darab esetén annál jobb illesztést kapunk, minél inkább a megfelelő helyükön vannak, így azon pontok közötti távolságot kell minimalizálni, melyek az adott darabok látható oldalain vannak. Az illesztett részek ezután merevtest transzformációval kerülnek az eredeti helyükre. A [4]-ben megadott görbeillesztés meglehetősen nagy számításigényű, mely a multiscale technika alkalmazásával egyszerűsíthető. A klasszikus megközelítések során sokszor felhasználják a sablon objektumot, javítva ezzel a helyreállítás pontosságát és hatékonyságát. Viszont sokszor olyan problémákat céloznak meg, ahol a sablon nem elérhető, például archeológiai alkalmazások esetén[4]. Számos olyan alkalmazás létezik, ahol a sablon objektum ismert: Ipari alkalmazások esetén a feldolgozott darabok 3D modelljei könnyedén megkaphatók. Az orvosi képfeldolgozásban általában használható egy atlasz, vagy kihasználható az emberi test szimmetriája. Például törött csontok helyreállítása során az egészséges csont szolgálhat sablonként, amint azt a 5.3. fejezetben látni fogjuk. Emiatt a puzzle probléma ezen utóbbi változatát vizsgáljuk ebben a cikkben, és egy általános megoldást javaslunk, ahol 2D és 3D transz-
3 208 Domokos Csaba, Kató Zoltán formációkat alkalmazunk. Az itt alkalmazott módszer nagyon hasonlít néhány affin regisztrációval kapcsolatos módszerhez[16,17]. Mindazonáltal ezen módszerek egyike sem konkrétan a puzzle problémával foglalkozik. [17]-ben azt feltételezik, hogy a képeken színinformáció is elérhető. Ezen intenzitás információk alapján, Hagege és Francos egy lineáris egyenletrendszert ír fel, melynek megoldása közvetlenül az ismeretlen transzformáció paramétereit eredményezi. [16]-ban egy elegáns megoldást mutattunk be, mellyel síkbeli alakzatok affin torzulásait lehet meghatározni. Viszont ez a módszer sem képes megoldani a puzzle problémát, mivel a deformáció nemlineáris, továbbá nem ismert a sablon objektum és annak megfigyelt darabjai közti megfeleltetés. A 2. fejezetben egy általános keretrendszert adunk meg a probléma megoldására, melyet a 3. fejezetben a numerikus implememtációs részletek követnek, majd a 4. fejezetben a módszer alkalmazásainak bemutatására kerül sor különböző lineáris transzformációk esetén. Végül a 5. fejezet a teszteredményeket mutatja be, melyeket 2D-s és 3D képeket tartalmazó szintetikusan generált adatbázisokon és több különböző valós képen kaptunk. A 6. fejezet foglalja össze a cikket. 2. Törött objektumok helyreállítása Adott egy n-dimenziós objektum a sablon képen és egy megfigyelés kép, mely a sablon deformált darabjait tartalmazza. Azt a transzformációt szeretnénk meghatározni, mely ezeket a darabokat a sablon képen lévő eredeti helyükre illeszti. Jelölje a sablon és a megfigyelés kép pontjainak homogén koordinátáit x = [x 1,...,x n,1] és y = [y 1,...,y n,1] P n. Továbbá, legyen l N a megfigyelésen lévő törött darabok száma. A megfigyelés kép sablon képhez való illesztését meghatározó nemlineáris transzformáció l darab lineáris (affin) transzformáció a i11 a i12... a i1(n+1). A i =...., i = 1,...l (1) a in1 a in2... a in(n+1) kompozíciójaként áll elő. Mivel a megfigyelés diszjunkt részeket tartalmaz, feltehetjük,hogyaλ : P n {0,1,...,l}adeformáltalakzatokcímkézésétadja,ahol a 0-t a háttérhez rendeljük. Nyilvánvalóan létezik a sablon képhez is egy rejtett λ : P n {0,1,...,l} címkézés,ahol az i címke a sablon kép i. darabjához tartozik.célunkazaffintranszformációkatmegadó{a i } l i=1 mátrixokmeghatározása. A legnagyobb kihívást az jelenti, hogy sem a sablon kép partícionálása (azaz a λ címkézés rejtett) sem pedig az alakzatok közötti megfeleltetés nem ismert Megoldás egy alakzat pár esetén Először az i. alakzat pár közötti kapcsolatot adjuk meg. Jelölje a sablon és megfigyelés képen lévő alakzatok által meghatározott tartományokat D i = {x
4 Affin Puzzle: Törött objektumok helyreállítása megfeleltetések nélkül 209 P n λ(x) = i} és D i = {y Pn λ (y) = i}. Megjegyezzük, hogy D i ismert, míg D i nem. Ezen tartományok pontjai az ismeretlen A i transzformációk alapján felelnek meg egymásnak: x = A i y. (2) Egy lehetőség az A i meghatározására, hogy pontmegfeleltetéseket határozunk meg, majd a (2) egyenletben megadott egyenletrendszert oldjuk meg. Mivel D i ismeretlen, emiatt a megfeleltetések megtalálása szinte lehetetlen. Ezért egy olyan direkt módszert keresünk, mely nem igényel megfeleltetéseket. Vegyük észre, hogy a (2)-ben megadott összefüggés akkor is érvényben marad, ha egy ω : P n R függvény hat az egyenlet mindkét oldalán [16]: Ebből integrálással kapjuk, hogy [16] ω(x)dx = A i D i ω(x) = ω(a i y). (3) D i ω(a i y)dy, (4) ahol x = A i y, dx = A i dy integrál transzformációt alkalmaztunk, illetve A i a Jacobi-féle determináns. A (4) egyenlet alapján nemlineáris {ω j } m j=1 (ahol m n(n+1)) függvények alkalmazásával annyi egyenletet kaphatunk, amennyire szükség van. Az így kapott nemlineáris egyenletrendszer megoldása adja A i paramétereit [16] Megoldás az összes alakzatra egyszerre Most már ismerjük az i. alakzat pár közötti összefüggéseket, de sem az alakzatok közötti megfeleltetés, sem pedig a sablon kép D i partícionálása nem ismert. Ha ezeket ismernénk, akkor az alakzatokra páronként egy hagyományos bináris regisztrációs algoritmust alkalmazva megkaphatnánk az illesztés paramétereit. Sajnos ez a parciális illesztés [9] problémájának megoldását igényelné a megfigyelésen lévő összes alakzat és a sablon kép között, mely nem triviális feladat. A megoldás, hogy összeadjuk az összes D i alakzathoz tartozó egyenletet és egy egyenletrendszerben egyszerre, az összes paraméter egyidejű becslésével oldjuk meg a feladatot. Így (4)-ből kapjuk, hogy l i=1 D i ω j (x)dx = l i=1 A i ω j (A i y)dy. (5) D i Legyen D := l i=1 D i, ahol D = {x P n λ(x) 0} a teljes sablon képen lévő objektumhoz tartozó tartományt jelöli. Ekkor az előző egyenlet bal oldala a következőképpen írható l ω j (x)dx = ω j (x)dx = D li=1 i D i i=1 D ω j (x)dx, (6)
5 210 Domokos Csaba, Kató Zoltán mely közvetlenül számolható az input képek alapján anélkül, hogy a D i partícionálásokat ismernénk. Az így kapott egyenletrendszer ln(n + 1) ismeretlent tartalmaz: l ω j (x)dx = A i ω j (A i y)dy, j = 1,...,m. (7) D D i i=1 A (7) egyenletrendszer megoldásával megkapjuk a teljes deformáció minden paraméterét. Mivel minden ω j egy egyenletet eredményez, így legalább m ln(n+1) lineárisan független függvényre van szükség az l lineáris transzformáció megtalálásához. A gyakorlatban m > ln(n+1), mely túlhatározott egyenletrendszerhez vezet, melyet legkisebb négyzetes értelemben oldunk meg. 3. Numerikus implementáció Elméletileg bármilyen nemlineáris függvény használható a (7) egyenletrendszer megkonstruálásához, mely kielégíti a (3) egyenletet. A gyakorlatban az egyenletrendszer megoldását olyan minimalizálási eljárással kapjuk, mely iteratívan, legkisebb-négyzetes értelemben oldja meg a feladatot. Ilyen algoritmus például a Levenberg-Marquardt algoritmus [18], mely jól megválasztott numerikus szerkezetet igényel Normalizálás Előszörmindkétképkoordinátáita[ 0.5,0.5] n hiperkockábanormalizáljuk,azaz l i=1 D i [ 0.5,0.5]n és D [ 0.5,0.5] n. A normalizálás során eltoljuk az origót az alakzatok tömegközéppontjába, melyet egy közös, a sablon és megfigyelés maximális mérete alapján számolt skálafaktorral végrehajtott izotropikus skálázás követ. Természetesen az egyenletrendszer megoldásával kapott értékeket vissza kell normalizálni, hogy a valódi, eredeti alakzatok közötti transzformációt megkapjuk. Jelölje a sablon és megfigyelés képhez tartozó normalizáló transzformációkat N t és N o, továbbá a kapott megoldást pedig Ãi. Ekkor a valódi transzformáció Âi = Nt 1 Ã i N o alakban áll elő minden i = 1,...,l esetén. Mivel a legkisebb-négyzetes értelemben vett megoldással a (7) egyenletrendszer algebrai hibáját minimalizáljuk, azt szeretnénk, ha az összes egyenlet egyenlő mértékben járulna hozzá az egyenletrendszer algebrai hibájához. Ez az ω j értékkészletének [ 1, 1] intervallumba való normalizálásával megoldható. Tapasztalati úton azt kaptuk, hogy a legkisebb-négyzetes értelemben vett minimalizálás esetén az egyes iterációk során alkalmazott transzformációk az alakzatokat az origó középpontú n/2 sugarú körön belül hagyják (az egységoldalú hiperkocka köréírhatóhipergömb).tehátazω j normalizálásamegvalósíthatóa(7)egyenletrendszerbenszereplőintegrálokmegfelelőc j konstanssalvalóleosztásával,melyet az integrálok előbbi tartományok (hipergömbök) feletti értéke alapján kapunk: c j = x n 2 ω j (x) dx, j = 1,...,m. (8)
6 Affin Puzzle: Törött objektumok helyreállítása megfeleltetések nélkül Algoritmus és időbonyolultság A gyakorlatban csak véges pontosságú digitális képek állnak rendelkezésünkre, így az integrálok csak közelíthetően az előtérpixelek felett vett véges összegekkel adhatók meg. Ez a közelítés elhanyagolható hibát eredményez a számítások során. A D és D i tartományokat az előtérpixelek D és D i véges halmazával reprezentáljuk. A normalizált (7) egyenletrendszer diszkrét változata az alábbi formában írható 1 ω j (N t x) = 1 l A i ω j (N o A i y), j = 1,...,m. (9) c j c j x D i=1 y D i A(9) egyenletrendszert Levenberg-Marquardt algoritmussal[18] oldjuk meg, mely iteratív minimalizáláson alapul és minden iterációban az összes egyenletet kiértékeli. Emiatt az algoritmus időbonyolultsága jelentősen csökkenthető lenne, ha a véges összegeket előre ki lehetne számolni elkerülve ezzel azt, hogy minden iterációban végig kelljen pásztázni a képet. Elméletileg tetszőleges olyan ω függvényhalmaz használható, melyek lineárisan független egyenleteket generálnak. [16]-ban megmutattuk, hogy polinomok választásával polinom egyenletrendszerhez jutunk, ahol a véges összegek előre kiszámolható konstansokká válnak. Figyelembe véve ezt a megállapítást polinomok következő halmazát fogjuk felhasználni {ω j : P n R} m j=1 = {x xu1 1...xun n u k N, k = 1,...,n, 0 n u k d}, (10) ahol d a maximális fokszám és a polinomok számát m = 1 n n! i=1 (d+i) adja. Az algoritmus pszeudokódját a (1) algoritmus mutatja. Mivel polinomiális függvényeket alkalmazunk a (9) egyenletrendszer generálása során, az ismeretlenek nem szerepelnek a véges összegeken belül [16]. Emiatt az algoritmus lineáris időbonyolultságú: a (9) egyenletrendszer megkonstruálásának időbonyolultsága O( D + l i=1 D i ), illetve magának a megoldónak pedig elvileg konstans, mivel független az input képek méretétől. k=1 4. Affin transzformációk A javasolt regisztrációs keretrendszert a legfontosabb lineáris transzformációkra alkalmazzuk: két- és háromdimenziós affin és merevtest transzformációkra. A 2-dimenziós affin transzformációkat gyakran alkalmazzák projektív torzulások lineáris közelítéseként. A 3D merevtest transzformációk számos orvosi alkalmazás során játszanak fontos szerepet. Például, mikor CT képeken lévő csontokat kell illeszteni, hiszen a csontok biomechanikus tulajdonságai miatt csak merevtest transzformáció jöhet szóba.
7 212 Domokos Csaba, Kató Zoltán Algorithm 1: A javasolt algoritmus pszeudokódja. Input : A bináris sablon (D) és l megfigyelt alakzat (D i, i = 1,...,l) Output: l darab illesztett Âi lineáris transzformáció 1 Normalizáljuk az input koordinátákat az [ 0.5,0.5] n -be egy megfelelő N hasonlósági transzformáció segítségével, úgy hogy az origó a tömegközéppontba kerül. 2 Választunk egy ω j : P n R (j = 1,...,m ln(n+1)) polimom függvényhalmazt. 3 Megkonstruáljuk a (túlhatározott) (9) egyenletrendszert. 4 Megkeressük a (9) egyenletrendszer legkisebb-négyzetes értelemben vett megoldását a Levenberg-Marquardt algoritmus felhasználásával. A megoldót az identikus transzformációval inicializáljuk. 5 A kapott Ãi megoldás visszanormalizálása Âi = N 1 t à in o alapján adja az illesztés paramétereit D affin transzformációk Egy 2D affin transzformációnak 6 paramétere van, tehát n = 2 és 6l ismeretlenünk van. Ahhoz, hogy elegendő egyenletet kapjunk, a (10)-ben leírt ω-k halmazát alkalmazzuk. Ekkor d-t úgy kell megválasztani, hogy m = (d+1)(d+2) l 3 6l d 2, (11) ahol az felső egészrészt jelöli. A (7) egyenlet bármely j = 1,...,m-re úgy írható, hogy D l x u1 1 xu2 2 dx = i=1 D i A i (a i11 y 1 +a i12 y 2 +a i13 ) u1 (a i21 y 1 +a i22 y 2 +a i23 ) u2 dy, aholajacobi-féledeterminánskönnyedénkiszámolható A i = a i11 a i22 a i12 a i21 alapján. (12) D affin transzformációk A 2-dimenziós eset 3-dimenzióra való kiterjesztése eléggé nyilvánvaló. Ekkor a sablon objektum darabjai különböző 3D affin transzformációk alapján torzulnak, és 12l ismeretlenünk van. d-t most úgy kell megválasztani, hogy m = (d+1)(d+2)(d+3) 6 12l d c c 2, ahol ( c = l+ ) (324l) 2 3. (13) A Jacobi-féle determináns hasonlóan számolható, mint a 2D-s esetben.
8 Affin Puzzle: Törött objektumok helyreállítása megfeleltetések nélkül D merevtest transzformációk A 3D merevtest transzformációk a 3D lineáris transzformációk fontos esetei. Egy 3D merevtest transzformáció hat szabadsági fokkal rendelkezik: α 1,α 2,α 3 a három tengely körül vett forgatások szögei, illetve t 1,t 2,t 3 az egyes tengelyek mentén vett eltolások. Hasonló {ω} m j=1 halmazt alkalmazunk, mint (13)-ban, csak most kevesebb polinomra van szükség: d c ( c 2, ahol c = l+ ) (27+162l) 2 3. (14) Mivel a merevtest transzformációk nem változtatják meg az objektumok méretét, a Jacobi-féle determináns értéke 1 lesz, emiatt nem szerepel az egyenletekben. 5. Eredmények A javasolt algoritmust 2D és 3D képeket tartalmazó, szintetikusan generált adatbázison teszteltük. A 2-dimenziós esetben az adatbázis 10 sablon objektumot tartalmazott. A megfigyeléseket úgy generáltuk, hogy minden objektumot négyféleképpen két részre vágtunk, így minden sablon képhez négy képet kaptunk. Majd 600 darab átlagosan as méretű megfigyelést állítottunk elő. Ezeket az alábbi affin transzformációk véletlen kompozíciójaként adódó transzformáció alkalmazásával kaptuk, ahol a paramétereket a megadott intervallumokból véletlenszerűen választottuk:[ π/4; π/4] mértékű forgatás, a két tengely mentén [0,75;1,25]-ből vett skálázás, [ 0,1;0,1] nyírás és [ 25;25] eltolás. A 3D esetben 10 sablon képet egy-egy véletlenszerűen megválasztott síkkal vágtuk két részre úgy, hogy a kisebbik rész legalább az eredeti objektum 20%-a legyen. A képek öt különböző szétvágásával 50 képet kaptunk. Ezután véletlenszerűen megválasztott 3D affin transzformációk alkalmazásával összesen 200 darab, átlagosan es méretű 3D megfigyelést generáltunk. Az alkalmazott transzformációk paraméterei a 2D esetnél leírt paraméterekhez hasonlóan lettek megválasztva (az egyetlen különbség, hogy az eltolás értékeit a [-10;10] intervallumból választottuk). Az eredmények kiértékelésére két hibamértéket definiáltunk: Az első, melyet ǫ jelöl, az átlagos távolságot méri a valódi A i és az illesztett Âi transzformáció között. A másik a sablon és a helyreállított képek abszolút különbsége, melyet δ jelöl. ǫ = (A i  i )p D, és δ = D D 100%, (15) p D i,1 i l D + D ahol két halmaz szimmetrikus különbségét, D = l i=1 D i és D = l i=1 D i pedig a megfigyelés és a helyreállított képek pixeleinek halmazát jelöli. Intuitíven ǫ az egy pixelre vetített átlagos transzformációs hibát mutatja. Megjegyezzük, hogy ǫ-t csak akkor tudjuk kiértékelni, ha a valódi transzformáció is ismert, ezzel szemben δ bármikor számolható. Viszont ǫ jobban kifejezi a transzformáció






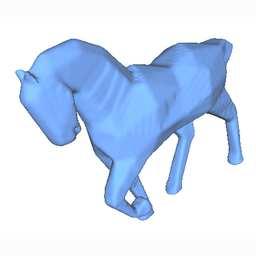
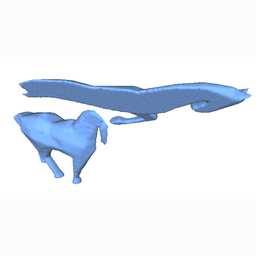



9 214 Domokos Csaba, Kató Zoltán sablon megfigyelés helyreállított megfigyelés helyreállított 1. ábra. Néhány 2-dimenziós képen kapott eredmény. sablon megfigyelés helyreállított 2. ábra. Néhány 3-dimenziós képen kapott eredmény.
10 Affin Puzzle: Törött objektumok helyreállítása megfeleltetések nélkül 215 hibáját. Tapasztalati úton azt találtuk, hogy a 2D esetben δ 5%, a 3D esetben pedig δ 10% esetén állíthatjuk azt, hogy vizuálisan jó eredményt kaptunk. A javasolt algoritmus Matlabban lett implementálva. A teszteket Linux alatt 3GHz-es 3GB memóriával rendelkező gépeken futtattuk. A 2-dimenziós esetben a tipikus futási idő 3 mp 3D-ben pedig 10 mp volt. A 1. és a 2. ábrán látható néhány futási eredmény. A 1. táblázatban láthatók a tesztesetek kiértékelése után kapott eredmények. Az eredmények világosan mutatják, hogy a javasolt módszer majdnem tökéletes eredményt szolgáltat mind a kétdimenziós mind a háromdimenziós esetben. Torzulásmentes esetek ǫ (pixel) δ (%) 2D affin transzformációk 0,11 0,13 3D affin transzformációk 0,7 3,09 (a) Hiányzó pixelek 1% 5% 10% 20% 1% 5% 10% 20% 2D affin transzformációk 6,57 21,1 32,83 56,26 2,09 6,24 8,39 12,62 3D affin transzformációk 1,22 4,65 9,71 19,02 3,99 8,67 15,8 23,54 (b) Takarás 1% 2,5% 5% 10% 1% 2,5% 5% 10% 2D affin transzformációk 9,91 20,45 35,04 58,68 3,54 6,35 9,51 13,75 3D affin transzformációk 3,27 7,7 14,73 22,74 8,07 13,08 18,47 26,13 (c) Kontúr menti hiba 1% 2,5% 5% 10% 1% 2,5% 5% 10% 2D affin transzformációk 1,9 3,91 6,65 12,23 0,59 1 1,73 3,08 3D affin transzformációk 0,99 1,44 2,33 4,03 3,23 3,65 4,44 5,8 1. táblázat. A javasolt algoritmus tesztelése során kapott hibamértékek mediánjai a 2D és 3D esetben. Az első két sorban a torzításmentes, szegmentálási hibát nem tartalmazó képeken kapott eredmények láthatók. A további sorokban a különböző típusú szegmentálási hiba esetén (lásd 3. ábra) kapott eredmények láthatók Robusztusság A gyakorlatban általában nem áll rendelkezésre az alakzatok tökéletes szegmentálása. Most a módszer szegmentálási hibákra vett érzékenységét, azaz a robusztusságát elemezzük. Az első esetben a megfigyelés előtérpixeleinek 1%,...,20% töröljük. A második esetben az eredeti objektum 1%,...,10%- nak megfelelő négyzet alakú területet takarunk ki. Majd az alakzatok kontúrja mentén az eredeti objektum 1%,...,10%-nak megfelelő részt módosítunk úgy, hogy egyenletesen eloszlás alapján négyzet alakú területeket adunk az adott alakzatokhoz vagy törlünk belőlük. Néhány valós képen kapott eredményt is bemutatunk, melyek önmagukban tartalmaznak szegmentálási hibákat. Megjegyezzük, hogy az olyan hibák, mikor nem összefüggő területek törlődnek, morfológiai műveletekkel hatékonyan megszüntethetők. A 3. ábra mutat néhány példát a tekintett hibákra. A 1. táblázat mutatja, hogy a módszerünk elég ro-
. Mindazonáltal, a módszer lokálisan jelentkező hiba esetén (pl. takarás) már kevésbé stabil.")
11 216 Domokos Csaba, Kató Zoltán (a) Hiányzó pixelek (b) Takarás (c) Kontúr menti hiba 3. ábra. Példák a vizsgált szegmentálási hibákra. busztus, ha a hiba egyenletesen oszlik el az objektum felett (például hiányzó pixelek, kontúr menti hiba). Mindazonáltal, a módszer lokálisan jelentkező hiba esetén (pl. takarás) már kevésbé stabil. Ez jellemző tulajdonsága a terület alapú módszereknek, mivel ezen módszerek az objektumok felett számolt integrálokat használják, melyeket az ilyen típusú hibák nagyon elrontanak. Emiatt egy nagyobb hiányzó vagy takarásban lévő terület drasztikus hibákat eredményezhet az illesztés során. Mindazonáltal számos alkalmazás során a képeket kontrollált körülmények között rögzítik, ezzel garantálva, hogy a megfigyeléseken ne legyen takarás (például orvosi képfeldolgozás, ipari minőségellenőrzés) A Tangram kirakó megoldása A Tangram kirakó több síkidomot tartalmaz, melyeket alkalmas módon összerakva különböző alakzatokat kaphatunk. A cél egy előre megadott alakzat kirakása, melynek csak a körvonalát ismerjük. A 4. ábrán látható néhány példa ilyen alakzatokra, illetve a módszerünk által talált megoldásokra. A képek digitális fényképezőgéppel készültek, majd az ezekből küszöböléssel kapott alakzatokat használtuk fel sablonként. A 4. ábrán lévő első három esetében a Tangram játék megoldásfüzetében található megoldások szkennelt változatát használtuk, mint sablon képet, melyek csak a kirakandó alakzat körülbelüli megfelelői. Itt affin modellt használunk az alakzatok közötti síkhomográfia közelítésére. Közismert tény, hogy a Levenberg-Marquardt algoritmus megragadhat a kezdeti érték közelében lévő lokális minimumokban. Jó inicializálást találni viszont alkalmazásfüggő feladat. Például ezeken a képeken (4.ábra) egy globális optimalizálási eljárás (pl. Spektrális gradiens módszer [19]) jó inicializálást adott, melyből indítva a Levenberg-Marquardt algoritmust jobb eredményt kapunk, mintha az identikus transzformációból indulnánk. Végül megjegyezzük, hogy a 4. ábrán lévő képeken kismértékű átfedés látható. Ezt az okozza, hogy az átfedés láthatatlan az egyenletrendszer számára. Mindazonáltal, az átfedés problémája megoldható lenne úgy, hogy minden iteráció során ellenőrizzük, hogy az aktuális transzformáció milyen átfedést okoz, de ez nagyon időigényes művelet.


![Ilyen esetekben számítógéppel segített műtéti tervezést [6] alkalmaznak a konkrét műtéti beavatkozás előtt.](/docs-images/86/94907235/images/12-2.jpg "Ezzel több információt nyernek a törött darabok elmozdulásáról és a beültetett implantátumok elhelyezkedését is egyszerű")



![[6]-ban a klasszikus ICP algoritmust használják a csontok helyreállítására. Winkelbach és tsai.](/docs-images/86/94907235/images/12-6.jpg "[7] jól ismert felszín regisztrációs technikákat alkalmaznak (pl.")

12 Affin Puzzle: Törött objektumok helyreállítása megfeleltetések nélkül ábra. Tangram kirakós példák. Fent: Sablon képek és a törött darabok kontúrja a helyreállítás után. Lent: Megfigyelések Törött csontok helyreállítása Bonyolultabb esetekben csontdarabok helyreállítása gyakran műtéti beavatkozást igényel, főképp ha az egyes darabok elfordulása vagy elmozdulása nagymértékű. Ilyen esetekben számítógéppel segített műtéti tervezést [6] alkalmaznak a konkrét műtéti beavatkozás előtt. Ezzel több információt nyernek a törött darabok elmozdulásáról és a beültetett implantátumok elhelyezkedését is egyszerű megvizsgálni. Az input adatok általában 3D CT képek, így az egyes részeket 3D térben kell mozgatni, mely drága 3D eszközöket, illetve sok manuális munkát igényel. Ezért a törött csontok automatikus helyreállítása jelentős időmegtakarítást eredményez, és egy olyan körülbelüli illesztést ad, melyet már könnyű manuálisan befejezni az adott anatómiai igényeknek megfelelően. A műtéti tervezés során a csontok biomechanikai tulajdonságát figyelembe véve, csak a merevtest transzformációk jöhetnek szóba. [6]-ban a klasszikus ICP algoritmust használják a csontok helyreállítására. Winkelbach és tsai. [7] jól ismert felszín regisztrációs technikákat alkalmaznak (pl. 2D mélység korreláció vagy ICP algoritmus) hengeres szerkezetű darabok helyreállítására. [8]-ban a regisztrációt úgy oldjuk meg, hogy egy kvadratikus szűrő fázis eltéréseinek lokális eltéréseit próbálják megbecsülni. Most a javasolt keretrendszerünket 3D csípőcsontok helyreállítására alkalmazzuk, ahol 3D merevtest transzformációkat tételezünk fel az objektumok között. Azokban az esetekben, mikor csak az egyik oldalon van sérülés, a sablon egyszerűen az egészséges rész tükrözésével megkapható. A 5. ábra egy tipikus esetet mutat csípőcsonttörésre, ahol a csont három részre van törve. A legnagyobb kihívást a szegmentálási hibák, illetve a nem teljesen pontos sablon jelenti, mely az emberi test nem tökéletes szimmetriájából adódik. Ezen nehézségek ellenére a nagyobb részek illesztése elég pontos, csupán a kisebb darabnál van egy kicsi il-




13 218 Domokos Csaba, Kató Zoltán Sablon az egészséges darab tükrözésével Megfigyelés Helyreállított csontdarabok 5. ábra. Törött csontok helyreállítása (a CPU idő 15 mp volt ezen az 1 megavoxeles CT képre). lesztési hiba. Mivel a kis rész által okozott hiba viszonylag kicsi, ezért a megoldó nem találja meg a tökéletes transzformációt. Ha a (9) egyenletben a tagokat valahogy tudnánk normalizálni, akkor az algebrai hiba is jobban szétoszlana az egyes egyenletek között, és pontosabb illesztést kaphatnánk. Sajnos ez kivitelezhetetlen, mert a megfelelő normalizáló konstansok kiszámításához ismerni kellene a sablon objektum partícionálását. Egy valós műtéti tervező rendszer nem működik emberi beavatkozás nélkül, emiatt a kisebb hibák nem annyira kritikusak és könnyen korrigálhatók.
14 Affin Puzzle: Törött objektumok helyreállítása megfeleltetések nélkül Konklúzió Egy újfajta keretrendszert mutattunk be a puzzle probléma megoldására, melyet 2D és 3D affin transzformációkra alkalmaztunk. A klasszikus megközelítések, melyek jellemző pontok kinyerésén és pontmegfeleltetéseken alapulnak, olyan megoldást javasolnak, ahol további információkat nem használnak fel. Alapjában a módszerünk egy polinom egyenletrendszer megkonstruálásán alapul, melynek megoldása közvetlenül megadja az ismeretlen paramétereket. Nyilvánvalóan, az objektumok száma és a deformáció erőssége befolyásolhatja az illesztés minőségét: Minél több törött részünk van, annál több egyenletre van szükség, mely befolyásolja a numerikus stabilitást. Továbbá, több törött rész több affin transzformációt eredményez, mely erősebb deformációhoz vezet. A törött részek teljesen véletlen elhelyezkedése egy bonyolult deformációnak felel meg, amikor a jó megoldást nehéz meghatározni. Másrészt, mikor a darabok viszonylagosan sorrendben vannak, sokkal pontosabb megoldást kapunk. Megjegyezzük, hogy a bemutatott orvosi alkalmazás során ez egy reális feltételezés a fizikai megszorítások miatt. A nagy számú teszteset, melyet 2D és 3D képeket tartalmazó szintetikus adatbázison futtattunk mutatják a módszer hatékonyságát és robusztusságát, illetve a valós képeken kapott eredmények megerősítik a módszer fontosságát több, különböző alkalmazási terület esetén. 7. Köszönetnyilvánítás A cikk megjelenését részben a K75637 OTKA és a CNK80370 NKTH projekt támogatásával valósult meg. A CT képeket a Szegedi Tudományegyetem, Traumatológiai Osztálya bocsátotta rendelkezésünkre Prof. Varga Endre hozzájárulásával. Hivatkozások 1. Domokos, C., Kato, Z.: Affine puzzle: Realigning deformed object fragments without correspondences. In Daniilidis, K., Maragos, P., Paragios, N., eds.: Proceedings of the European Conference on Computer Vision. Volume 6312 of Lecture Notes in Computer Science., Heraklion, Crete, Greece, Springer (2010) Kong, W., Kimia, B.B.: On solving 2D and 3D puzzles using curve matching. In: Proceedings of the International Conference on Computer Vision and Pattern Recognition. Volume 2., Kauai, Hawaii, IEEE (2001) Papaioannou, G., Karabassi, E.A., Theoharis, T.: Reconstruction of threedimensional objects through matching of their parts. IEEE Transactions on Pattern Analysis and Machine Intelligence 24 (2002) McBride, J.C., Kimia, B.B.: Archaeological fragment reconstruction using curvematching. In: Proceedings of the International Conference on Computer Vision and Pattern Recognition Workshop, Madison, Wisconsin, USA, IEEE (2003) Hill, D.L.G., Batchelor, P.G., Holden, M., Hawkes, D.J.: Medical image registration. Physics in Medicine and Biology 46 (2001) R1 R45
15 220 Domokos Csaba, Kató Zoltán 6. Erdőhelyi, B., Varga, E.: Semi-automatic bone fracture reduction in surgical planning. In: Proceedings of the International Conference on Computer Assisted Radiology and Surgery. Volume 4 of International Journal of Computer Assisted Radiology and Surgery., Berlin, Germany, Springer (2009) S98 S99 7. Winkelbach, S., Westphal, R., Goesling, T.: Pose estimation of cylindrical fragments for semi-automatic bone fracture reduction. In Michaelis, B., Krell, G., eds.: Proceedings of Annual Symposium of the German Association for Pattern Recognition. Volume 2781 of Lecture Notes in Computer Science., Magdeburg, Germany, Springer (2003) Pettersson, J., Knutsson, H., Borga, M.: Non-rigid registration for automatic fracture segmentation. In: Proceedings of International Conference on Image Processing, Atlanta, GA, USA, IEEE (2006) Bronstein, A.M., Bronstein, M.M.: Regularized partial matching of rigid shapes. In Forsyth, D., Torr, P., Zisserman, A., eds.: Proceedings of the European Conference on Computer Vision. Volume 5303 of Lecture Notes in Computer Science., Marseille, France, Springer (2008) Funkhouser, T., Shilane, P.: Partial matching of 3D shapes with priority-driven search. In: Proceedings of the Eurographics Symposium on Geometry Processing, Sardinia, Italy, Eurographics, ACM SIGGRAPH (2006) Reuter, M.: Hierarchical shape segmentation and registration via topological features of Laplace-Beltrami eigenfunctions. International Journal of Computer Vision 89 (2010) Rustamov, R.M.: Laplace-Beltrami eigenfunctions for deformation invariant shape representation. In: Proceedings of the Eurographics Symposium on Geometry Processing, Barcelona, Spain, Eurographics, ACM SIGGRAPH (2007) Besl, P.J., McKay, N.D.: A method for registration of 3-D shapes. IEEE Transactions on Pattern Analysis and Machine Intelligence 14 (1992) Periaswamy, S., Farid, H.: Medical image registration with partial data. Medical Image Analysis 10 (2006) Feldmar, J., Ayache, N.: Rigid, affine and locally affine registration of free-form surfaces. International Journal of Computer Vision 18 (1996) Domokos, C., Kato, Z.: Parametric estimation of affine deformations of planar shapes. Pattern Recognition 43 (2010) Hagege, R.R., Francos, J.M.: Estimation of affine geometric transformations of several objects from global measurements. In: Proceedings of IEEE International Workshop on Multimedia Signal Processing, Rio de Janeiro, Brazil, IEEE (2009) Marquardt, D.W.: An algorithm for least-squares estimation of nonlinear parameters. SIAM Journal on Applied Mathematics 11 (1963) Birgin, E.G., Martínes, J.M., Raydan, M.: SPG: Software for convex-constrained optimization. ACM Transactions on Mathematical Software 27 (2001)
An deformációk paramétereinek becslése megfeletetések nélkül
 Szegedi Tudományegyetem Informatikai Tanszékcsoport An deformációk paramétereinek becslése megfeletetések nélkül PhD-értekezés tézisei Domokos Csaba Témavezet : Dr. Kató Zoltán Szeged 2010 Bevezetés A
Szegedi Tudományegyetem Informatikai Tanszékcsoport An deformációk paramétereinek becslése megfeletetések nélkül PhD-értekezés tézisei Domokos Csaba Témavezet : Dr. Kató Zoltán Szeged 2010 Bevezetés A
3D objektumok lineáris deformációinak becslése
 3D objektumok lineáris deformációinak becslése Tanács Attila 1, Joakim Lindblad 2, Nataša Sladoje 3, Kató Zoltán 1 1 Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem {tanacs,kato}@inf.u-szeged.hu
3D objektumok lineáris deformációinak becslése Tanács Attila 1, Joakim Lindblad 2, Nataša Sladoje 3, Kató Zoltán 1 1 Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem {tanacs,kato}@inf.u-szeged.hu
8. Pontmegfeleltetések
 8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
8. Pontmegfeleltetések Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Példa: panoráma kép készítés 1. Jellemzőpontok detektálása mindkét
Konjugált gradiens módszer
 Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
2D és 3D bináris objektumok lineáris
 2D és 3D bináris objektumok lineáris deformáció-becslésének numerikus megoldási lehetőségei Tanács Attila 1, Joakim Lindblad 2, Nataša Sladoje 3, Kató Zoltán 1 1 Képfeldolgozás és Számítógépes Grafika
2D és 3D bináris objektumok lineáris deformáció-becslésének numerikus megoldási lehetőségei Tanács Attila 1, Joakim Lindblad 2, Nataša Sladoje 3, Kató Zoltán 1 1 Képfeldolgozás és Számítógépes Grafika
Panorámakép készítése
 Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
3D-s számítógépes geometria és alakzatrekonstrukció
 3D-s számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás,
3D-s számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás,
7. Régió alapú szegmentálás
 Digitális képek szegmentálása 7. Régió alapú szegmentálás Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Szegmentálási kritériumok Particionáljuk a képet az alábbi kritériumokat kielégítő régiókba
Digitális képek szegmentálása 7. Régió alapú szegmentálás Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Szegmentálási kritériumok Particionáljuk a képet az alábbi kritériumokat kielégítő régiókba
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
Grafikonok automatikus elemzése
 Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
PONTFELHŐ REGISZTRÁCIÓ
 PONTFELHŐ REGISZTRÁCIÓ ITERATIVE CLOSEST POINT Cserteg Tamás, URLGNI, 2018.11.22. TARTALOM Röviden Alakzatrekonstrukció áttekintés ICP algoritmusok Projektfeladat Demó FORRÁSOK Cikkek Efficient Variants
PONTFELHŐ REGISZTRÁCIÓ ITERATIVE CLOSEST POINT Cserteg Tamás, URLGNI, 2018.11.22. TARTALOM Röviden Alakzatrekonstrukció áttekintés ICP algoritmusok Projektfeladat Demó FORRÁSOK Cikkek Efficient Variants
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Lineáris algebra numerikus módszerei
 Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Hermite interpoláció Tegyük fel, hogy az x 0, x 1,..., x k [a, b] különböző alappontok (k n), továbbá m 0, m 1,..., m k N multiplicitások úgy, hogy Legyenek adottak k m i = n + 1. i=0 f (j) (x i ) = y
Lineáris leképezések (előadásvázlat, szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla
 Maróti Miklós, Kátai-Urbán Kamilla") Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
Lineáris leképezések (előadásvázlat, 2012. szeptember 28.) Maróti Miklós, Kátai-Urbán Kamilla Ennek az előadásnak a megértéséhez a következő fogalmakat kell tudni: homogén lineáris egyenletrendszer és
3. Szűrés képtérben. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 3. Szűrés képtérben Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Kép transzformációk típusai Kép értékkészletének radiometriai információ
3. Szűrés képtérben Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Kép transzformációk típusai Kép értékkészletének radiometriai információ
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
Keresés képi jellemzők alapján. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
3. Lineáris differenciálegyenletek
 3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
Vizuális objektumok affin és nem-lineáris regisztrációja
 Szegedi Tudományegyetem Informatikai Intézet SZTE Informatika Doktori Iskola Vizuális objektumok affin és nem-lineáris regisztrációja Ph.D. értekezés tézisei Sánta Zsolt Témavezető: Dr. Kató Zoltán egyetemi
Szegedi Tudományegyetem Informatikai Intézet SZTE Informatika Doktori Iskola Vizuális objektumok affin és nem-lineáris regisztrációja Ph.D. értekezés tézisei Sánta Zsolt Témavezető: Dr. Kató Zoltán egyetemi
Legkisebb négyzetek módszere, Spline interpoláció
 Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
Szegedi Tudományegyetem Informatika Doktori Iskola. Dr. Csirik János
 Szegedi Tudományegyetem Informatika Doktori Iskola Bináris képek geometriai és vizuális helyreálĺıtása PhD értekezés tézisei Németh József Témavezetők: Dr. Csirik János Dr. Kató Zoltán Szeged 2015 Bevezetés
Szegedi Tudományegyetem Informatika Doktori Iskola Bináris képek geometriai és vizuális helyreálĺıtása PhD értekezés tézisei Németh József Témavezetők: Dr. Csirik János Dr. Kató Zoltán Szeged 2015 Bevezetés
Képfeldolgozás. 1. el adás. A képfeldolgozás m veletei. Mechatronikai mérnök szak BME, 2008
 Képfeldolgozás 1. el adás. A képfeldolgozás m veletei Mechatronikai mérnök szak BME, 2008 1 / 61 Alapfogalmak transzformációk Deníció Deníció Geometriai korrekciókra akkor van szükség, ha a képr l valódi
Képfeldolgozás 1. el adás. A képfeldolgozás m veletei Mechatronikai mérnök szak BME, 2008 1 / 61 Alapfogalmak transzformációk Deníció Deníció Geometriai korrekciókra akkor van szükség, ha a képr l valódi
Gyakorló feladatok. Agbeko Kwami Nutefe és Nagy Noémi
 Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Lineáris regressziós modellek 1
 Lineáris regressziós modellek 1 Ispány Márton és Jeszenszky Péter 2016. szeptember 19. 1 Az ábrák C.M. Bishop: Pattern Recognition and Machine Learning c. könyvéből származnak. Tartalom Bevezető példák
Lineáris regressziós modellek 1 Ispány Márton és Jeszenszky Péter 2016. szeptember 19. 1 Az ábrák C.M. Bishop: Pattern Recognition and Machine Learning c. könyvéből származnak. Tartalom Bevezető példák
Morfológia. Sergyán Szabolcs Óbudai Egyetem Neumann János Informatikai Kar Szoftvertechnológia Intézet
 Morfológia Sergyán Szabolcs sergyan.szabolcs@nik.uni-obuda.hu Óbudai Egyetem Neumann János Informatikai Kar Szoftvertechnológia Intézet 2012. október 9. Sergyán (OE NIK) Morfológia 2012. október 9. 1 /
Morfológia Sergyán Szabolcs sergyan.szabolcs@nik.uni-obuda.hu Óbudai Egyetem Neumann János Informatikai Kar Szoftvertechnológia Intézet 2012. október 9. Sergyán (OE NIK) Morfológia 2012. október 9. 1 /
3. Fuzzy aritmetika. Gépi intelligencia I. Fodor János NIMGI1MIEM BMF NIK IMRI
 3. Fuzzy aritmetika Gépi intelligencia I. Fodor János BMF NIK IMRI NIMGI1MIEM Tartalomjegyzék I 1 Intervallum-aritmetika 2 Fuzzy intervallumok és fuzzy számok Fuzzy intervallumok LR fuzzy intervallumok
3. Fuzzy aritmetika Gépi intelligencia I. Fodor János BMF NIK IMRI NIMGI1MIEM Tartalomjegyzék I 1 Intervallum-aritmetika 2 Fuzzy intervallumok és fuzzy számok Fuzzy intervallumok LR fuzzy intervallumok
6. gyakorlat. Gelle Kitti. Csendes Tibor Somogyi Viktor. London András. jegyzetei alapján
 Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Közelítő és szimbolikus számítások 6. gyakorlat Sajátérték, Gersgorin körök Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján . Mátrixok sajátértékei
Nem teljesen kitöltött páros összehasonlítás mátrixok sajátérték optimalizálása Newton-módszerrel p. 1/29. Ábele-Nagy Kristóf BCE, ELTE
 Nem teljesen kitöltött páros összehasonlítás mátrixok sajátérték optimalizálása Newton-módszerrel Ábele-Nagy Kristóf BCE, ELTE Bozóki Sándor BCE, MTA SZTAKI 2010. november 4. Nem teljesen kitöltött páros
Nem teljesen kitöltött páros összehasonlítás mátrixok sajátérték optimalizálása Newton-módszerrel Ábele-Nagy Kristóf BCE, ELTE Bozóki Sándor BCE, MTA SZTAKI 2010. november 4. Nem teljesen kitöltött páros
Matematika III előadás
 Matematika III. - 3. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 19 Skalármezők
Matematika III. - 3. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 19 Skalármezők
12. előadás. Egyenletrendszerek, mátrixok. Dr. Szörényi Miklós, Dr. Kallós Gábor
 12. előadás Egyenletrendszerek, mátrixok Dr. Szörényi Miklós, Dr. Kallós Gábor 2015 2016 1 Tartalom Matematikai alapok Vektorok és mátrixok megadása Tömbkonstansok Lineáris műveletek Mátrixok szorzása
12. előadás Egyenletrendszerek, mátrixok Dr. Szörényi Miklós, Dr. Kallós Gábor 2015 2016 1 Tartalom Matematikai alapok Vektorok és mátrixok megadása Tömbkonstansok Lineáris műveletek Mátrixok szorzása
A mérési eredmény megadása
 A mérési eredmény megadása A mérés során kapott értékek eltérnek a mérendő fizikai mennyiség valódi értékétől. Alapvetően kétféle mérési hibát különböztetünk meg: a determinisztikus és a véletlenszerű
A mérési eredmény megadása A mérés során kapott értékek eltérnek a mérendő fizikai mennyiség valódi értékétől. Alapvetően kétféle mérési hibát különböztetünk meg: a determinisztikus és a véletlenszerű
Gauss-Jordan módszer Legkisebb négyzetek módszere, egyenes LNM, polinom LNM, függvény. Lineáris algebra numerikus módszerei
 A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás)
") Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Henger eltávolítása 3D szkennelt kavicsról
 Henger eltávolítása 3D szkennelt kavicsról Ludmány Balázs 2018. december 6. Kavicsok alakfejlődése A sziklák általában síkok mentén hasadnak Ahogy a víz szállítja őket folyamatosan lekerekednek Matematikai
Henger eltávolítása 3D szkennelt kavicsról Ludmány Balázs 2018. december 6. Kavicsok alakfejlődése A sziklák általában síkok mentén hasadnak Ahogy a víz szállítja őket folyamatosan lekerekednek Matematikai
A KLT (Kanade Lucas Tomasi) Feature Tracker Működése (jellegzetes pontok választása és követése)
 Feature Tracker Működése (jellegzetes pontok választása és követése)") A KL (Kanade Lucas omasi) Feature racker Működése (jellegzetes pontok választása és követése) Készítette: Hajder Levente 008.11.18. 1. Feladat A rendelkezésre álló videó egy adott képkockájából minél több
A KL (Kanade Lucas omasi) Feature racker Működése (jellegzetes pontok választása és követése) Készítette: Hajder Levente 008.11.18. 1. Feladat A rendelkezésre álló videó egy adott képkockájából minél több
1. Generátorrendszer. Házi feladat (fizikából tudjuk) Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak
 Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak") 1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
Körbelátó kamerák (oktatási segédanyag)
") Körbelátó kamerák (oktatási segédanyag) Kató Zoltán 2014 október 2 Tartalomjegyzék 1. A körbelátó kamera geometriai modellezése 7 1.1. A körbelátó optikákról......................... 7 1.2. A katadioptrikus
Körbelátó kamerák (oktatási segédanyag) Kató Zoltán 2014 október 2 Tartalomjegyzék 1. A körbelátó kamera geometriai modellezése 7 1.1. A körbelátó optikákról......................... 7 1.2. A katadioptrikus
6. Modell illesztés, alakzatok
 6. Modell illesztés, alakzatok Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 ROBOSZTUS EGYENES ILLESZTÉS Egyenes illesztés Adott a síkban
6. Modell illesztés, alakzatok Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 ROBOSZTUS EGYENES ILLESZTÉS Egyenes illesztés Adott a síkban
Optimalizálás alapfeladata Legmeredekebb lejtő Lagrange függvény Log-barrier módszer Büntetőfüggvény módszer 2017/
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Gauss-Seidel iteráció
 Közelítő és szimbolikus számítások 5. gyakorlat Iterációs módszerek: Jacobi és Gauss-Seidel iteráció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 ITERÁCIÓS
Közelítő és szimbolikus számítások 5. gyakorlat Iterációs módszerek: Jacobi és Gauss-Seidel iteráció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 ITERÁCIÓS
BitTorrent felhasználók értékeléseinek következtetése a viselkedésük alapján. Hegedűs István
 BitTorrent felhasználók értékeléseinek következtetése a viselkedésük alapján Hegedűs István Ajánló rendszerek Napjainkban egyre népszerűbb az ajánló rendszerek alkalmazása A cégeket is hasznos információval
BitTorrent felhasználók értékeléseinek következtetése a viselkedésük alapján Hegedűs István Ajánló rendszerek Napjainkban egyre népszerűbb az ajánló rendszerek alkalmazása A cégeket is hasznos információval
Gauss elimináció, LU felbontás
 Közelítő és szimbolikus számítások 3. gyakorlat Gauss elimináció, LU felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 EGYENLETRENDSZEREK 1. Egyenletrendszerek
Közelítő és szimbolikus számítások 3. gyakorlat Gauss elimináció, LU felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 EGYENLETRENDSZEREK 1. Egyenletrendszerek
Térbeli transzformációk, a tér leképezése síkra
 Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével
 Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 213. október 8. Javítva: 213.1.13. Határozzuk
Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 213. október 8. Javítva: 213.1.13. Határozzuk
Felügyelt önálló tanulás - Analízis III.
 Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
Felügyelt önálló tanulás - Analízis III Kormos Máté Differenciálható sokaságok Sokaságok Röviden, sokaságoknak nevezzük azokat az objektumokat, amelyek egy n dimenziós térben lokálisan k dimenziósak Definíció:
1. Számsorok, hatványsorok, Taylor-sor, Fourier-sor
 . Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következő végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle belső konvergenciakritérium) A a n végtelen sor akkor és csakis
. Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következő végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle belső konvergenciakritérium) A a n végtelen sor akkor és csakis
1. Gauss-eloszlás, természetes szórás
 1. Gauss-eloszlás, természetes szórás A Gauss-eloszlásnak megfelelő függvény: amely egy σ szélességű, µ középpontú, 1-re normált (azaz a teljes görbe alatti terület 1) görbét ír le. A természetben a centrális
1. Gauss-eloszlás, természetes szórás A Gauss-eloszlásnak megfelelő függvény: amely egy σ szélességű, µ középpontú, 1-re normált (azaz a teljes görbe alatti terület 1) görbét ír le. A természetben a centrális
Végeselem modellezés alapjai 1. óra
 Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel
 Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel Segédlet az A végeselem módszer alapjai tárgy 4. laborgyakorlatához http://www.mm.bme.hu/~kossa/vemalap4.pdf Kossa Attila (kossa@mm.bme.hu)
Hajlított tartó elmozdulásmez jének meghatározása Ritz-módszerrel Segédlet az A végeselem módszer alapjai tárgy 4. laborgyakorlatához http://www.mm.bme.hu/~kossa/vemalap4.pdf Kossa Attila (kossa@mm.bme.hu)
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1
![1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1](/thumbs/88/116339870.jpg "1.9. B - SPLINEOK B - SPLINEOK EGZISZTENCIÁJA. numerikus analízis ii. 34. [ a, b] - n legfeljebb n darab gyöke lehet. = r (m 1) n = r m + n 1") numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
numerikus analízis ii 34 Ezért [ a, b] - n legfeljebb n darab gyöke lehet = r (m 1) n = r m + n 1 19 B - SPLINEOK VOLT: Ω n véges felosztás S n (Ω n ) véges dimenziós altér A bázis az úgynevezett egyoldalú
Számítógépes képelemzés 7. előadás. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
Transzformációk síkon, térben
 Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Kontrollcsoport-generálási lehetőségek retrospektív egészségügyi vizsgálatokhoz
 Kontrollcsoport-generálási lehetőségek retrospektív egészségügyi vizsgálatokhoz Szekér Szabolcs 1, Dr. Fogarassyné dr. Vathy Ágnes 2 1 Pannon Egyetem Rendszer- és Számítástudományi Tanszék, szekersz@gmail.com
Kontrollcsoport-generálási lehetőségek retrospektív egészségügyi vizsgálatokhoz Szekér Szabolcs 1, Dr. Fogarassyné dr. Vathy Ágnes 2 1 Pannon Egyetem Rendszer- és Számítástudományi Tanszék, szekersz@gmail.com
Számítási feladatok a Számítógépi geometria órához
 Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Diszkréten mintavételezett függvények
 Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Regresszió. Csorba János. Nagyméretű adathalmazok kezelése március 31.
 Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Matematika II. 1 sin xdx =, 1 cos xdx =, 1 + x 2 dx =
 Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Matematika előadás elméleti kérdéseinél kérdezhető képletek Matematika II Határozatlan Integrálszámítás d) Adja meg az alábbi alapintegrálokat! x n 1 dx =, sin 2 x dx = d) Adja meg az alábbi alapintegrálokat!
Szélsőérték feladatok megoldása
 Szélsőérték feladatok megoldása A z = f (x,y) függvény lokális szélsőértékének meghatározása: A. Szükséges feltétel: f x (x,y) = 0 f y (x,y) = 0 egyenletrendszer megoldása, amire a továbbiakban az x =
Szélsőérték feladatok megoldása A z = f (x,y) függvény lokális szélsőértékének meghatározása: A. Szükséges feltétel: f x (x,y) = 0 f y (x,y) = 0 egyenletrendszer megoldása, amire a továbbiakban az x =
10. Koordinátageometria
 I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
I. Nulladik ZH-ban láttuk: 0. Koordinátageometria. Melyek azok a P x; y pontok, amelyek koordinátái kielégítik az Ábrázolja a megoldáshalmazt a koordináta-síkon! x y x 0 egyenlőtlenséget? ELTE 00. szeptember
Feladatok a Gazdasági matematika II. tárgy gyakorlataihoz
 Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
ACM Snake. Orvosi képdiagnosztika 11. előadás első fele
 ACM Snake Orvosi képdiagnosztika 11. előadás első fele ACM Snake (ismétlés) A szegmentáló kontúr egy paraméteres görbe: x Zs s X s, Y s,, s A szegmentáció energia funkcionál minimalizálása: E x Eint x
ACM Snake Orvosi képdiagnosztika 11. előadás első fele ACM Snake (ismétlés) A szegmentáló kontúr egy paraméteres görbe: x Zs s X s, Y s,, s A szegmentáció energia funkcionál minimalizálása: E x Eint x
Számítógépes döntéstámogatás. Genetikus algoritmusok
 BLSZM-10 p. 1/18 Számítógépes döntéstámogatás Genetikus algoritmusok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu BLSZM-10 p. 2/18 Bevezetés 1950-60-as
BLSZM-10 p. 1/18 Számítógépes döntéstámogatás Genetikus algoritmusok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu BLSZM-10 p. 2/18 Bevezetés 1950-60-as
Matematika A2 vizsga mgeoldása június 4.
 Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Matematika A vizsga mgeoldása 03. június.. (a (3 pont Definiálja az f(x, y függvény határértékét az (x 0, y 0 helyen! Megoldás: Legyen D R, f : D R. Legyen az f(x, y függvény értelmezve az (x 0, y 0 pont
Számítógépes Grafika SZIE YMÉK
 Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Általános algoritmustervezési módszerek
 Általános algoritmustervezési módszerek Ebben a részben arra mutatunk példát, hogy miként használhatóak olyan általános algoritmustervezési módszerek mint a dinamikus programozás és a korlátozás és szétválasztás
Általános algoritmustervezési módszerek Ebben a részben arra mutatunk példát, hogy miként használhatóak olyan általános algoritmustervezési módszerek mint a dinamikus programozás és a korlátozás és szétválasztás
Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás robotra
 Budapesti M szaki És Gazdaságtudományi Egyetem Gépészmérnöki Kar M szaki Mechanikai Tanszék Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás
Budapesti M szaki És Gazdaságtudományi Egyetem Gépészmérnöki Kar M szaki Mechanikai Tanszék Denavit-Hartenberg konvenció alkalmazása térbeli 3DoF nyílt kinematikai láncú hengerkoordinátás és gömbi koordinátás
HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE
 HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE BEMUTATKOZÁS Hajder Levente (1975-?) Tanulmányok: BME első kísérlet 1993-1995 Kandó Kálmán Műszaki Főiskola (Ma: Óbudai Egyetem) 1995-1998 BME második,
HÁROMDIMENZIÓS SZÁMÍTÓGÉPES LÁTÁS HAJDER LEVENTE BEMUTATKOZÁS Hajder Levente (1975-?) Tanulmányok: BME első kísérlet 1993-1995 Kandó Kálmán Műszaki Főiskola (Ma: Óbudai Egyetem) 1995-1998 BME második,
1. Homogén lineáris egyenletrendszer megoldástere
 X HOMOGÉN LINEÁRIS EGYENLET- RENDSZEREK 1 Homogén lineáris egyenletrendszer megoldástere Homogén lineáris egyenletrendszer definíciója már szerepelt Olyan lineáris egyenletrendszert nevezünk homogénnek,
X HOMOGÉN LINEÁRIS EGYENLET- RENDSZEREK 1 Homogén lineáris egyenletrendszer megoldástere Homogén lineáris egyenletrendszer definíciója már szerepelt Olyan lineáris egyenletrendszert nevezünk homogénnek,
A lineáris programozás alapjai
 A lineáris programozás alapjai A konvex analízis alapjai: konvexitás, konvex kombináció, hipersíkok, félterek, extrém pontok, Poliéderek, a Minkowski-Weyl tétel (a poliéderek reprezentációs tétele) Lineáris
A lineáris programozás alapjai A konvex analízis alapjai: konvexitás, konvex kombináció, hipersíkok, félterek, extrém pontok, Poliéderek, a Minkowski-Weyl tétel (a poliéderek reprezentációs tétele) Lineáris
Gráfelmélet/Diszkrét Matematika MSc hallgatók számára. 13. Előadás
 Gráfelmélet/Diszkrét Matematika MSc hallgatók számára 13. Előadás Előadó: Hajnal Péter Jegyzetelő: Hajnal Péter 2009. december 7. Gráfok sajátértékei Definíció. Egy G egyszerű gráf sajátértékei az A G
Gráfelmélet/Diszkrét Matematika MSc hallgatók számára 13. Előadás Előadó: Hajnal Péter Jegyzetelő: Hajnal Péter 2009. december 7. Gráfok sajátértékei Definíció. Egy G egyszerű gráf sajátértékei az A G
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 9 IX. ROBUsZTUs statisztika 1. ROBUsZTUssÁG Az eddig kidolgozott módszerek főleg olyanok voltak, amelyek valamilyen értelemben optimálisak,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 9 IX. ROBUsZTUs statisztika 1. ROBUsZTUssÁG Az eddig kidolgozott módszerek főleg olyanok voltak, amelyek valamilyen értelemben optimálisak,
Grid felhasználás: alkalmazott matematika
 Grid felhasználás: alkalmazott matematika Konvex testek egyensúlyi osztályozása a Saleve keretrendszerrel Kápolnai Richárd 1 Domokos Gábor 2 Szabó Tímea 2 1 BME Irányítástechnika és Informatika Tanszék
Grid felhasználás: alkalmazott matematika Konvex testek egyensúlyi osztályozása a Saleve keretrendszerrel Kápolnai Richárd 1 Domokos Gábor 2 Szabó Tímea 2 1 BME Irányítástechnika és Informatika Tanszék
Függvények Megoldások
 Függvények Megoldások ) Az ábrán egy ; intervallumon értelmezett függvény grafikonja látható. Válassza ki a felsoroltakból a függvény hozzárendelési szabályát! a) x x b) x x + c) x ( x + ) b) Az x függvény
Függvények Megoldások ) Az ábrán egy ; intervallumon értelmezett függvény grafikonja látható. Válassza ki a felsoroltakból a függvény hozzárendelési szabályát! a) x x b) x x + c) x ( x + ) b) Az x függvény
MATE-INFO UBB verseny, március 25. MATEMATIKA írásbeli vizsga
 BABEŞ-BOLYAI TUDOMÁNYEGYETEM, KOLOZSVÁR MATEMATIKA ÉS INFORMATIKA KAR MATE-INFO UBB verseny, 218. március 25. MATEMATIKA írásbeli vizsga FONTOS TUDNIVALÓK: 1 A feleletválasztós feladatok,,a rész esetén
BABEŞ-BOLYAI TUDOMÁNYEGYETEM, KOLOZSVÁR MATEMATIKA ÉS INFORMATIKA KAR MATE-INFO UBB verseny, 218. március 25. MATEMATIKA írásbeli vizsga FONTOS TUDNIVALÓK: 1 A feleletválasztós feladatok,,a rész esetén
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Vektorok és koordinátageometria
 Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Vektorok és koordinátageometria Vektorral kapcsolatos alapfogalmak http://zanza.tv/matematika/geometria/vektorok-bevezetese Definíció: Ha egy szakasz két végpontját megkülönböztetjük egymástól oly módon,
Saj at ert ek-probl em ak febru ar 26.
 Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Nem roncsoló tesztelés diszkrét tomográfiával
 Nem roncsoló tesztelés diszkrét tomográfiával Dr. Balázs Péter, adjunktus Képfeldolgozás és Számítógépes Grafika Tanszék SZTE TTIK, Informatikai Tanszékcsoport A teszteléshez használt CT berendezés lapdetektor
Nem roncsoló tesztelés diszkrét tomográfiával Dr. Balázs Péter, adjunktus Képfeldolgozás és Számítógépes Grafika Tanszék SZTE TTIK, Informatikai Tanszékcsoport A teszteléshez használt CT berendezés lapdetektor
Numerikus integrálás április 20.
 Numerikus integrálás 2017. április 20. Integrálás A deriválás papíron is automatikusan elvégezhető feladat. Az analitikus integrálás ezzel szemben problémás vannak szabályok, de nem minden integrálható
Numerikus integrálás 2017. április 20. Integrálás A deriválás papíron is automatikusan elvégezhető feladat. Az analitikus integrálás ezzel szemben problémás vannak szabályok, de nem minden integrálható
2015. évi Bolyai János Megyei Matematikaverseny MEGOLDÁSI ÉS ÉRTÉKELÉSI ÚTMUTATÓ 12. évfolyam
 01. évi Bolyai János Megyei Matematikaverseny MEGOLDÁSI ÉS ÉRTÉKELÉSI ÚTMUTATÓ 1. évfolyam A közölt megoldási utak a feladatoknak nem az egyetlen helyes megoldási módját adják meg, több eltérő megoldás
01. évi Bolyai János Megyei Matematikaverseny MEGOLDÁSI ÉS ÉRTÉKELÉSI ÚTMUTATÓ 1. évfolyam A közölt megoldási utak a feladatoknak nem az egyetlen helyes megoldási módját adják meg, több eltérő megoldás
Homográfia becslése részleges ismert affin transzformációból
 Eighth Hungarian Conference on Computer Graphics and Geometry, Budapest, 2016 Homográfia becslése részleges ismert affin transzformációból Baráth Dániel és Hajder Levente MTA SZTAKI, Elosztott Események
Eighth Hungarian Conference on Computer Graphics and Geometry, Budapest, 2016 Homográfia becslése részleges ismert affin transzformációból Baráth Dániel és Hajder Levente MTA SZTAKI, Elosztott Események
6. Függvények. 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban?
 6. Függvények I. Nulladik ZH-ban láttuk: 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban? f x g x cos x h x x ( ) sin x (A) Az f és a h. (B) Mindhárom. (C) Csak az f.
6. Függvények I. Nulladik ZH-ban láttuk: 1. Az alábbi függvények közül melyik szigorúan monoton növekvő a 0;1 intervallumban? f x g x cos x h x x ( ) sin x (A) Az f és a h. (B) Mindhárom. (C) Csak az f.
IV. Felkészítő feladatsor
 IV. Felkészítő feladatsor 1. Az A halmaz elemei a (-7)-nél nagyobb, de 4-nél kisebb egész számok. B a nemnegatív egész számok halmaza. Elemeinek felsorolásával adja meg az A \ B halmazt! I. 2. Adott a
IV. Felkészítő feladatsor 1. Az A halmaz elemei a (-7)-nél nagyobb, de 4-nél kisebb egész számok. B a nemnegatív egész számok halmaza. Elemeinek felsorolásával adja meg az A \ B halmazt! I. 2. Adott a
Közösség detektálás gráfokban
 Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
15. LINEÁRIS EGYENLETRENDSZEREK
 15 LINEÁRIS EGYENLETRENDSZEREK 151 Lineáris egyenletrendszer, Gauss elimináció 1 Definíció Lineáris egyenletrendszernek nevezzük az (1) a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
15 LINEÁRIS EGYENLETRENDSZEREK 151 Lineáris egyenletrendszer, Gauss elimináció 1 Definíció Lineáris egyenletrendszernek nevezzük az (1) a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
Első zárthelyi dolgozat megoldásai biomatematikából * A verzió
 Első zárthelyi dolgozat megoldásai biomatematikából * A verzió Elméleti kérdések: E. Mikor nevezünk egy gráfot gyengén és mikor erősen összefüggőnek? Adjon példát gyengén összefüggő de erősen nem összefüggő
Első zárthelyi dolgozat megoldásai biomatematikából * A verzió Elméleti kérdések: E. Mikor nevezünk egy gráfot gyengén és mikor erősen összefüggőnek? Adjon példát gyengén összefüggő de erősen nem összefüggő
Biomatematika 12. Szent István Egyetem Állatorvos-tudományi Kar. Fodor János
 Szent István Egyetem Állatorvos-tudományi Kar Biomatematikai és Számítástechnikai Tanszék Biomatematika 12. Regresszió- és korrelációanaĺızis Fodor János Copyright c Fodor.Janos@aotk.szie.hu Last Revision
Szent István Egyetem Állatorvos-tudományi Kar Biomatematikai és Számítástechnikai Tanszék Biomatematika 12. Regresszió- és korrelációanaĺızis Fodor János Copyright c Fodor.Janos@aotk.szie.hu Last Revision
Totális Unimodularitás és LP dualitás. Tapolcai János
 Totális Unimodularitás és LP dualitás Tapolcai János tapolcai@tmit.bme.hu 1 Optimalizálási feladat kezelése NP-nehéz Hatékony megoldás vélhetően nem létezik Jó esetben hatékony algoritmussal közelíteni
Totális Unimodularitás és LP dualitás Tapolcai János tapolcai@tmit.bme.hu 1 Optimalizálási feladat kezelése NP-nehéz Hatékony megoldás vélhetően nem létezik Jó esetben hatékony algoritmussal közelíteni
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Vektorterek. =a gyakorlatokon megoldásra ajánlott
 Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Statisztika - bevezetés Méréselmélet PE MIK MI_BSc VI_BSc 1
 Statisztika - bevezetés 00.04.05. Méréselmélet PE MIK MI_BSc VI_BSc Bevezetés Véletlen jelenség fogalma jelenséget okok bizonyos rendszere hozza létre ha mindegyik figyelembe vehető egyértelmű leírás általában
Statisztika - bevezetés 00.04.05. Méréselmélet PE MIK MI_BSc VI_BSc Bevezetés Véletlen jelenség fogalma jelenséget okok bizonyos rendszere hozza létre ha mindegyik figyelembe vehető egyértelmű leírás általában
LNM folytonos Az interpoláció Lagrange interpoláció. Lineáris algebra numerikus módszerei
 Legkisebb négyzetek módszere, folytonos eset Folytonos eset Legyen f C[a, b]és h(x) = a 1 φ 1 (x) + a 2 φ 2 (x) +... + a n φ n (x). Ekkor tehát az n 2 F (a 1,..., a n ) = f a i φ i = = b a i=1 f (x) 2
Legkisebb négyzetek módszere, folytonos eset Folytonos eset Legyen f C[a, b]és h(x) = a 1 φ 1 (x) + a 2 φ 2 (x) +... + a n φ n (x). Ekkor tehát az n 2 F (a 1,..., a n ) = f a i φ i = = b a i=1 f (x) 2