Digitális képek feldolgozása Előfeldolgozás Radiometriai korrekció Geometriai korrekció Képjavítás Szűrők Sávok közötti műveletek Képosztályozás Utófe
|
|
|
- Róbert Vincze
- 8 évvel ezelőtt
- Látták:
Átírás
 Erdőmérnöki szak, Környezettudós")

1 Távérzékelés Digitális felvételek előfeldolgozása (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési Tanszék

2 Digitális képek feldolgozása Előfeldolgozás Radiometriai korrekció Geometriai korrekció Képjavítás Szűrők Sávok közötti műveletek Képosztályozás Utófeldolgozás

3 Felvételek előfeldolgozási szintjei Level-0: Helyreállított teljes felbontású forrásadatok, csak a kommunikációs hibákat távolítják el Level-1A: Helyreállított teljes felbontású forrásadatok, a megfelelő idővel és egyéb kiegészítő információkkal (radiom., geom., pályaadatok) ellátva Level-1B: Feldolgozott Level-1A adatok Level-2: Levezetett geofizikai változók azonos felbontással és pozícióval, mint a Level-1 adatok Level-3: A változók egységes térbeli cellákra alakítása, bizonyos teljességgel és állandósággal Level-4: Alacsonyabb szintű adatok elemzéséből modellezéssel előállított adatok

4 Radiometriai korrekció Pixelérték (DN) -> fizikai mennyiség (W/m 2 *sr) Érzékelő karakterisztikája Felvételi geometria Atmoszféra hatása

5 SPOT Radiometriai kalibrációja DN L = + A B Ahol: L sugárzás (W/m 2 *sr) DN pixelérték A szorzóállandó B összeadóállandó A és B a felvétel fejlécében megtalálható

6 Felvételi geometria BDRF Bidirectional Reflectance Distribution Function

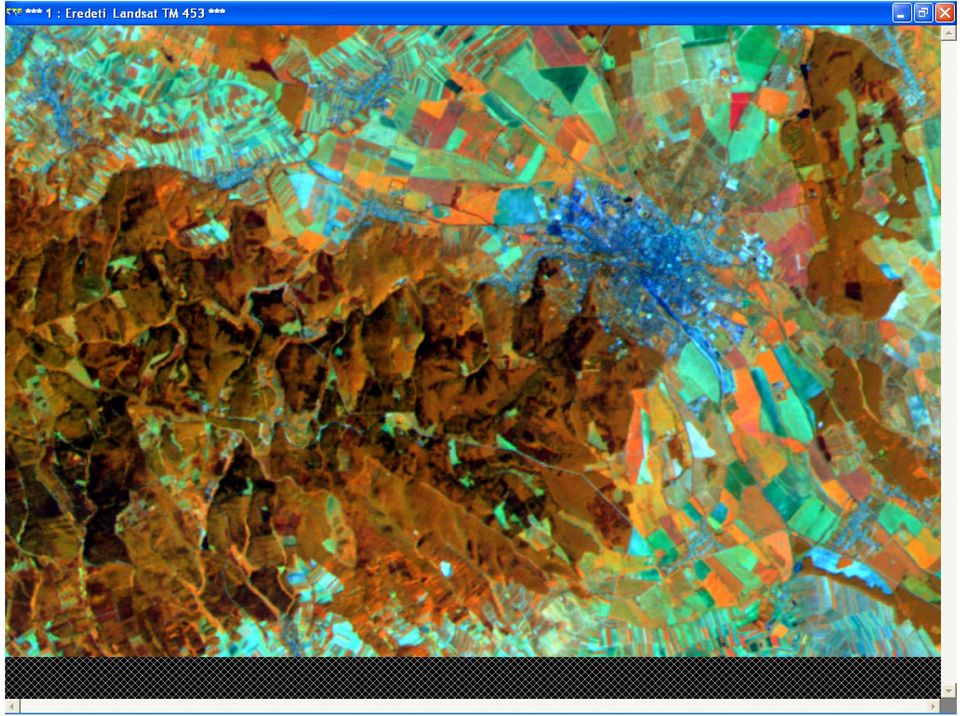
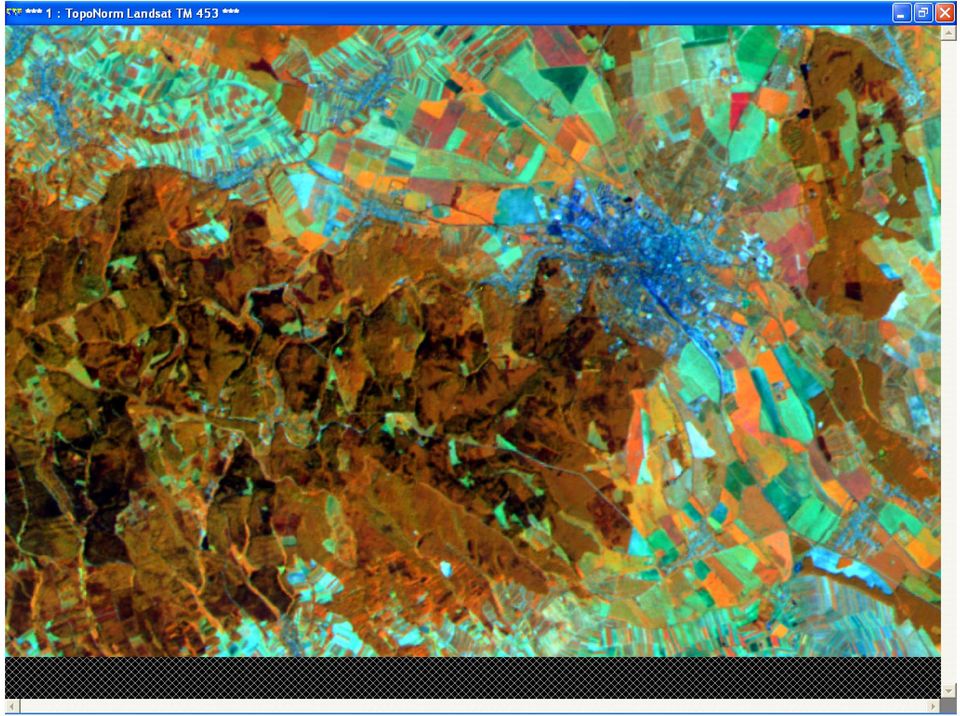
7 Topográfiai normalizáció A topográfia mind a geometriára, mind a radiometriára hatással van Geometria -> orthorektifikáció Radiometria -> topográfiai normalizáció (gyakran az atmoszférikussal együtt végzik el)

8 Topográfiai normalizáció Módszerek Lambert-féle tükröző R n cos = Re cos i i = cos (90 ΘS ) cos ΘF + sin (90 - ΘS ) sin ΘF Minnaert módszer R n = R cos e k cos e i cos Ahol: e kilépési szög k e k Minnaert-konstans cos ( Φ S - Φ F )
")
9
10
11 Atmoszférikus korrekció Szórás Elnyelés Vízgőz és aeroszol tartalom Ezen hatások csökkentése

12 Atmoszférikus korrekció módszerek Sugárzási áthatolási egyenlet Közelítő Aeroszol és vízgőz mennyiség becslése ATCOR csomag Földi mérések A felvételkészítéssel párhuzamosan földi mérések Egyéb módszerek Különleges érzékelők az aeroszol és vízgőz mennyiségének mérésére (pl. EO-1 AC)

13 Atmoszférikus korrekció

14 Geometriai korrekció Közelítő megoldások Polinomos transzformáció Egzakt megoldások Ortorektifikáció Érzékelő dimenziója 0D, 1D, 2D

15 Polinomos transzformáció Illesztőpontok alapján Ahol: x,y u,v a ij, b ij n vetületi koordináták digitális képi (pixel) koordináták együtthatók polinom fokszáma
 koordináták együtthatók polinom")
16 Ortorektifikáció Képhelyesbítés Eredeti felvételi helyzet visszaállítása (X 0, Y 0, Z 0, ω, φ, κ) Direkt tájékozás (GPS+INS) Indirekt tájékozás (Illesztőpontok) Belső (F, c, r) Külső (X 0, Y 0, Z 0, ω, φ, κ) Kölcsönös Abszolút
 Külső (X 0, Y 0, Z 0, ω, φ, κ) Kölcsönös")
17 Digitális belső tájékozás Digitális képi (pixel) koordináta -> képi koordináta x kép = a 0 + a 1 x pixel + a 2 y pixel y kép = b 0 + b 1 x pixel + b 2 y pixel

18 Digitális kölcsönös tájékozás Koplanaritás 5 paraméter 5 kapcsolópont

19 ξ = η = Digitális abszolút tájékozás Kollinearitás r11 ( X X 0 ) + r21 ( Y Y0 ) + r31 ( Z Z0 ) ξ0 c r13 ( X X 0 ) + r23 ( Y Y0 ) + r33 ( Z Z0 ) r12 ( X X 0 ) + r22 ( Y Y0 ) + r32 ( Z Z0 ) η0 c r ( X X ) + r ( Y Y ) + r ( Z Z ) 13 0 ahol: c kameraállandó O (X0, X0, Z0) vetítési középpont H (ξ0, η0) képfőpont P (X, Y, Z) tárgypont P (ξ, η) képpont rik forgatási mátrix elemei
 képfőpont P (X, Y, Z) tárgypont P (ξ, η) képpont rik forgatási mátrix elemei 23 0 33")
20 Digitális abszolút tájékozás Nem lineárisak Trigonometrikusak Newton-féle linearizáció Kvadratikusan konvergál

21 1D érzékelők A hordozóeszköz, egy jól meghatározott, sima, közel kör alakú pályán mozog A sorokat meghatározott időközökkel veszi fel A tájékozási paramétereket az idő függvényében alacsony fokú polinomokkal közelítik
22 0D érzékelők Rendszerkorrekció keretében elvégzik a geometriai korrekciókat is Nincs lehetőség fotogrammetriai kiértékelésre
23 Térbeli mérés
24 Ortorektifikáció
Tesszeláció A vizsgált területet úgy osztjuk fel elemi egységekre, hogy azok hézag- és átfedésmentesek legyenek. Az elemi egységek alakja szerint megk
 Monitoring távérzékeléssel Digitális felvételek előfeldolgozása (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és
Monitoring távérzékeléssel Digitális felvételek előfeldolgozása (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és
 Távérzékelés Analóg felvételek feldolgozása (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Távérzékelés Analóg felvételek feldolgozása (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Általános nemzeti projektek Magyar Topográfiai Program (MTP) - Magyarország Digitális Ortofotó Programja (MADOP) CORINE Land Cover (CLC) projektek Mez
 - Magyarország Digitális Ortofotó Programja (MADOP) CORINE Land Cover (CLC) projektek Mez") Távérzékelés Országos távérzékelési projektek (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Távérzékelés Országos távérzékelési projektek (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Az érzékelők legfontosabb elemei Optikai rendszer: lencsék, tükrök, rekeszek, szóró tagok, stb. Érzékelők: Az aktív felületükre eső sugárzás arányában
 Monitoring távérzékeléssel - passzív digitális érzékelők (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Monitoring távérzékeléssel - passzív digitális érzékelők (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Fotogrammetriai munkaállomások szoftvermoduljainak tervezése. Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar
 Fotogrammetriai munkaállomások szoftvermoduljainak tervezése Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar Témakörök DPW szoftvermodulok Szoftverek funkciói Pár példa Mi hiányzik gyakran?
Fotogrammetriai munkaállomások szoftvermoduljainak tervezése Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar Témakörök DPW szoftvermodulok Szoftverek funkciói Pár példa Mi hiányzik gyakran?
Hordozó réteg: a légi fotogrammetriában film, a földi fotogrammetriában film, vagy üveglemez.
 Monitoring távérzékeléssel - Fényképészeti felvevőrendszerek (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Monitoring távérzékeléssel - Fényképészeti felvevőrendszerek (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Űrfelvételek térinformatikai rendszerbe integrálása
 Budapest, 2005. október 18. Űrfelvételek térinformatikai rendszerbe integrálása Molnár Gábor ELTE Geofizikai Tanszék Űrkutató Csoport Témavezető: Dr. Ferencz Csaba Eötvös Loránd Tudományegyetem Geofizikai
Budapest, 2005. október 18. Űrfelvételek térinformatikai rendszerbe integrálása Molnár Gábor ELTE Geofizikai Tanszék Űrkutató Csoport Témavezető: Dr. Ferencz Csaba Eötvös Loránd Tudományegyetem Geofizikai
Analóg felvételek Centrális leképezéssel készült felvételek Nem centrális leképezéssel készült felvételek
 Monitoring távérzékeléssel Analóg felvételek feldolgozása (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Monitoring távérzékeléssel Analóg felvételek feldolgozása (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
A fotogrammetria ismeretek és a szakmai tudás fontossága
 Óbudai Egyetem Alba Regia Műszaki Kar Geoinformatikai Intézet A fotogrammetria ismeretek és a szakmai tudás fontossága 3. Légifotó Nap, Székesfehérvár, 2018. február 7. A fotogrammetria fogalma A fotogrammetria
Óbudai Egyetem Alba Regia Műszaki Kar Geoinformatikai Intézet A fotogrammetria ismeretek és a szakmai tudás fontossága 3. Légifotó Nap, Székesfehérvár, 2018. február 7. A fotogrammetria fogalma A fotogrammetria
Térinformatika és Geoinformatika
 Távérzékelés 1 Térinformatika és Geoinformatika 2 A térinformatika az informatika azon része, amely térbeli adatokat, térbeli információkat dolgoz fel A geoinformatika az informatika azon része, amely
Távérzékelés 1 Térinformatika és Geoinformatika 2 A térinformatika az informatika azon része, amely térbeli adatokat, térbeli információkat dolgoz fel A geoinformatika az informatika azon része, amely
Kamerakalibráció és pozícióbecslés érzékenységi analízissel, sík mintázatokból. Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI)
, Fazekas Zoltán (MTA SZTAKI)") , 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
, 2008 feb. 4-5 Kamerakalibráció és pozícióbecslés érzékenységi Bódis-Szomorú András Dabóczi Tamás (BME MIT), Fazekas Zoltán (MTA SZTAKI) Méréstechnika- és Információs Rendszerek Tanszék BME Rendszer-
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag. Mátrix rangja
 VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
Távérzékelt felvételek előfeldolgozása
 Távérzékelt felvételek előfeldolgozása Csornai Gábor László István Budapest Főváros Kormányhivatala Mezőgazdasági Távérzékelési és Helyszíni Ellenőrzési Osztály Az előadás 2011-es átdolgozott változata
Távérzékelt felvételek előfeldolgozása Csornai Gábor László István Budapest Főváros Kormányhivatala Mezőgazdasági Távérzékelési és Helyszíni Ellenőrzési Osztály Az előadás 2011-es átdolgozott változata
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Földmérési és Távérzékelési Intézet. GISopen 2013: Jogi változások informatikai válaszok. 2013. március 13. NymE - Geoinformatikai Kar, Székesfehérvár
 Az állami digitális távérzékelési adatbázisok létrehozása, kezelésének feladatai Zboray Zoltán igazgató Távérzékelési és Kozmikus Geodéziai Igazgatóság (TKGI) GISopen 2013: Jogi változások informatikai
Az állami digitális távérzékelési adatbázisok létrehozása, kezelésének feladatai Zboray Zoltán igazgató Távérzékelési és Kozmikus Geodéziai Igazgatóság (TKGI) GISopen 2013: Jogi változások informatikai
Osztott paraméterű éghajlat-lefolyás modell építése a Zala vízgyűjtőjén
 Osztott paraméterű éghajlat-lefolyás modell építése a Zala vízgyűjtőjén Gribovszki Zoltán Csáki Péter Kalicz Péter Nyugat-magyarországi Egyetem, Erdőmérnöki Kar, Geomatikai, Erdőfeltárási és Vízgazdálkodási
Osztott paraméterű éghajlat-lefolyás modell építése a Zala vízgyűjtőjén Gribovszki Zoltán Csáki Péter Kalicz Péter Nyugat-magyarországi Egyetem, Erdőmérnöki Kar, Geomatikai, Erdőfeltárási és Vízgazdálkodási
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport
 Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Csoportosítás. Térinformatikai műveletek, elemzések. Csoportosítás. Csoportosítás
 Csoportosítás Térinformatikai műveletek, elemzések Leíró (attribútum) adatokra vonatkozó kérdések, műveletek, elemzések, csoportosítások,... Térbeli (geometriai) adatokra vonatkozó kérdések, műveletek
Csoportosítás Térinformatikai műveletek, elemzések Leíró (attribútum) adatokra vonatkozó kérdések, műveletek, elemzések, csoportosítások,... Térbeli (geometriai) adatokra vonatkozó kérdések, műveletek
1. Generátorrendszer. Házi feladat (fizikából tudjuk) Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak
 Ha v és w nem párhuzamos síkvektorok, akkor generátorrendszert alkotnak a sík vektorainak") 1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
1. Generátorrendszer Generátorrendszer. Tétel (Freud, 4.3.4. Tétel) Legyen V vektortér a T test fölött és v 1,v 2,...,v m V. Ekkor a λ 1 v 1 + λ 2 v 2 +... + λ m v m alakú vektorok, ahol λ 1,λ 2,...,λ
Automatikus irányzás digitális képek. feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA
 Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
Automatikus irányzás digitális képek feldolgozásával TURÁK BENCE DR. ÉGETŐ CSABA Koncepció Robotmérőállomásra távcsővére rögzített kamera Képek alapján a cél automatikus detektálása És az irányzás elvégzése
A városi vegetáció felmérése távérzékelési módszerekkel Vécsei Erzsébet
 A városi vegetáció felmérése távérzékelési módszerekkel Vécsei Erzsébet Előzmények A távérzékelés az elmúlt évtizedben rohamosan fejlődésnek indult. A felhasználók részéről megjelent az igény az egyre
A városi vegetáció felmérése távérzékelési módszerekkel Vécsei Erzsébet Előzmények A távérzékelés az elmúlt évtizedben rohamosan fejlődésnek indult. A felhasználók részéről megjelent az igény az egyre
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Számítógépes geometria (mester kurzus)
") 2010 sz, Debreceni Egyetem Csuklós szerkezetek animációja (Kép 1985-b l: Tony de Peltrie) Csontváz-modellek Csuklós szerkezet (robotkar) A robotkar részei: csuklók (joints) rotációs prizmatikus (transzlációs)
2010 sz, Debreceni Egyetem Csuklós szerkezetek animációja (Kép 1985-b l: Tony de Peltrie) Csontváz-modellek Csuklós szerkezet (robotkar) A robotkar részei: csuklók (joints) rotációs prizmatikus (transzlációs)
8. előadás. Kúpszeletek
 8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
8. előadás Kúpszeletek Kör A k kört egyértelműen meghatározza C(a,b) középpontja és r sugara. A P pont pontosan akkor van k-n, ha CP=r. Vektoregyenlet: p-c = r. Koordinátás egyenlet: (X-a)2 + (Y-b)2 =
Távérzékelés. Modern Technológiai eszközök a vadgazdálkodásban
 Távérzékelés Modern Technológiai eszközök a vadgazdálkodásban A távérzékelés Azon technikák összessége, amelyek segítségével információt szerezhetünk a megfigyelés tárgyáról anélkül, hogy azzal közvetlen
Távérzékelés Modern Technológiai eszközök a vadgazdálkodásban A távérzékelés Azon technikák összessége, amelyek segítségével információt szerezhetünk a megfigyelés tárgyáról anélkül, hogy azzal közvetlen
Vektorterek. =a gyakorlatokon megoldásra ajánlott
 Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
Vektorterek =a gyakorlatokon megoldásra ajánlott 40. Alteret alkotnak-e a valós R 5 vektortérben a megadott részhalmazok? Ha igen, akkor hány dimenziósak? (a) L = { (x 1, x 2, x 3, x 4, x 5 ) x 1 = x 5,
GPK M1 (BME) Interpoláció / 16
 Interpoláció / 16") Interpoláció Matematika M1 gépészmérnököknek 2017. március 13. GPK M1 (BME) Interpoláció 2017 1 / 16 Az interpoláció alapfeladata - Példa Tegyük fel, hogy egy ipari termék - pl. autó - előzetes konstrukciójának
Interpoláció Matematika M1 gépészmérnököknek 2017. március 13. GPK M1 (BME) Interpoláció 2017 1 / 16 Az interpoláció alapfeladata - Példa Tegyük fel, hogy egy ipari termék - pl. autó - előzetes konstrukciójának
1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás)
") Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
 Monitoring távérzékeléssel Természetvédelmi alkalmazások (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Monitoring távérzékeléssel Természetvédelmi alkalmazások (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Érzékelők csoportosítása Passzív Nem letapogató Nem képalkotó mh. radiométer, graviméter Képalkotó - Kamerák Letapogató (képalkotó) Képsíkban TV kamer
 Képsíkban TV kamer") Monitoring távérzékeléssel - aktív digitális érzékelők (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Monitoring távérzékeléssel - aktív digitális érzékelők (E130-501) Természetvédelmi MSc szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI. 1. Bevezetés
 TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI Dr. Goda Tibor egyetemi docens Gép- és Terméktervezés Tanszék 1. Bevezetés 1.1. A végeselem módszer alapjai - diszkretizáció, - szerkezet felbontása kicsi szabályos elemekre
TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI Dr. Goda Tibor egyetemi docens Gép- és Terméktervezés Tanszék 1. Bevezetés 1.1. A végeselem módszer alapjai - diszkretizáció, - szerkezet felbontása kicsi szabályos elemekre
Számítógépes geometria
 2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
29/2014. (III. 31.) VM rendelet az állami digitális távérzékelési adatbázisról
 VM rendelet az állami digitális távérzékelési adatbázisról") 29/2014. (III. 31.) VM rendelet az állami digitális távérzékelési adatbázisról A földmérési és térképészeti tevékenységről szóló 2012. évi XLVI. törvény 38. (3) bekezdés b) pontjában kapott felhatalmazás
29/2014. (III. 31.) VM rendelet az állami digitális távérzékelési adatbázisról A földmérési és térképészeti tevékenységről szóló 2012. évi XLVI. törvény 38. (3) bekezdés b) pontjában kapott felhatalmazás
1. feladatsor Komplex számok
 . feladatsor Komplex számok.. Feladat. Kanonikus alakban számolva határozzuk meg az alábbi műveletek eredményét. (a) i 0 ; i 8 ; (b) + 4i; 3 i (c) ( + 5i)( 6i); (d) i 3+i ; (e) 3i ; (f) ( +3i)(8+i) ( 4
. feladatsor Komplex számok.. Feladat. Kanonikus alakban számolva határozzuk meg az alábbi műveletek eredményét. (a) i 0 ; i 8 ; (b) + 4i; 3 i (c) ( + 5i)( 6i); (d) i 3+i ; (e) 3i ; (f) ( +3i)(8+i) ( 4
A FIR-ek alkotóelemei: < hardver (bemeneti, kimeneti eszközök és a számítógép), < szoftver (ARC/INFO, ArcView, MapInfo), < adatok, < felhasználók.
, < szoftver (ARC/INFO, ArcView, MapInfo), < adatok, < felhasználók.") Leíró adatok vagy attribútumok: az egyes objektumok sajátságait, tulajdonságait írják le számítógépek számára feldolgozható módon. A FIR- ek által megválaszolható kérdések: < 1. Mi van egy adott helyen?
Leíró adatok vagy attribútumok: az egyes objektumok sajátságait, tulajdonságait írják le számítógépek számára feldolgozható módon. A FIR- ek által megválaszolható kérdések: < 1. Mi van egy adott helyen?
LINEÁRIS ALGEBRA. matematika alapszak. Euklideszi terek. SZTE Bolyai Intézet, őszi félév. Euklideszi terek LINEÁRIS ALGEBRA 1 / 40
 LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
Digitális fotogrammetria
 Digitális fotogrammetria I. Áttekintés Digitális fotogrammetria (DFG): digitális felvételeket használ Elıállíthatók: fotogrammetriai szkennerekkel hagyományos légifényképekbıl, vagy közvetlenül digitális
Digitális fotogrammetria I. Áttekintés Digitális fotogrammetria (DFG): digitális felvételeket használ Elıállíthatók: fotogrammetriai szkennerekkel hagyományos légifényképekbıl, vagy közvetlenül digitális
Kvadratikus alakok gyakorlás.
 Kvadratikus alakok gakorlás Kúpszeletek: Adott eg kvadratikus alak a következő formában: ax 2 + 2bx + c 2 + k 1 x + k 2 + d = 0, a, b, c, k 1, k 2, d R (1) Ezt felírhatjuk a x T A x + K x + d = 0 alakban,
Kvadratikus alakok gakorlás Kúpszeletek: Adott eg kvadratikus alak a következő formában: ax 2 + 2bx + c 2 + k 1 x + k 2 + d = 0, a, b, c, k 1, k 2, d R (1) Ezt felírhatjuk a x T A x + K x + d = 0 alakban,
SZAKKÖZÉPISKOLA ÉRETTSÉGI VIZSGRA FELKÉSZÍTŐ KK/12. ÉVFOLYAM
 SZAKKÖZÉPISKOLA ÉRETTSÉGI VIZSGRA FELKÉSZÍTŐ KK/12. ÉVFOLYAM A vizsga szerkezete: A vizsga írásbeli és szóbeli vizsgarészből áll. 1.) Írásbeli vizsga Időtartama: 45 perc Elérhető pontszám: 65 pont Feladattípusok:
SZAKKÖZÉPISKOLA ÉRETTSÉGI VIZSGRA FELKÉSZÍTŐ KK/12. ÉVFOLYAM A vizsga szerkezete: A vizsga írásbeli és szóbeli vizsgarészből áll. 1.) Írásbeli vizsga Időtartama: 45 perc Elérhető pontszám: 65 pont Feladattípusok:
Szenzorcsatolt robot: A szenzorcsatolás lépései:
 1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
Matematika osztályozó vizsga témakörei 9. évfolyam II. félév:
 Matematika osztályozó vizsga témakörei 9. évfolyam II. félév: 7. Függvények: - függvények fogalma, megadása, ábrázolás koordináta- rendszerben - az elsőfokú függvény, lineáris függvény - a másodfokú függvény
Matematika osztályozó vizsga témakörei 9. évfolyam II. félév: 7. Függvények: - függvények fogalma, megadása, ábrázolás koordináta- rendszerben - az elsőfokú függvény, lineáris függvény - a másodfokú függvény
Matematikai geodéziai számítások 5.
 Matematikai geodéziai számítások 5 Hibaterjedési feladatok Dr Bácsatyai László Matematikai geodéziai számítások 5: Hibaterjedési feladatok Dr Bácsatyai László Lektor: Dr Benedek Judit Ez a modul a TÁMOP
Matematikai geodéziai számítások 5 Hibaterjedési feladatok Dr Bácsatyai László Matematikai geodéziai számítások 5: Hibaterjedési feladatok Dr Bácsatyai László Lektor: Dr Benedek Judit Ez a modul a TÁMOP
2. Omnidirekcionális kamera
 2. Omnidirekcionális kamera Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Omnidirekcionális kamerák típusai Omnidirekcionális, körbelátó,
2. Omnidirekcionális kamera Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Omnidirekcionális kamerák típusai Omnidirekcionális, körbelátó,
Diszkréten mintavételezett függvények
 Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
2018/2019. Matematika 10.K
 Egész éves dolgozat szükséges felszerelés: toll, ceruza, radír, vonalzó, körző, számológép, függvénytáblázat 2 órás, 4 jegyet ér 2019. május 27-31. héten Aki hiányzik, a következő héten írja meg, e nélkül
Egész éves dolgozat szükséges felszerelés: toll, ceruza, radír, vonalzó, körző, számológép, függvénytáblázat 2 órás, 4 jegyet ér 2019. május 27-31. héten Aki hiányzik, a következő héten írja meg, e nélkül
differenciálegyenletek
 Állandó együtthatójú lineáris homogén differenciálegyenletek L[y] = y (n) + a 1y (n 1) + + a ny = 0 a i R (1) a valós, állandó együtthatójú lineáris homogén n-ed rendű differenciálegyenlet Megoldását y
Állandó együtthatójú lineáris homogén differenciálegyenletek L[y] = y (n) + a 1y (n 1) + + a ny = 0 a i R (1) a valós, állandó együtthatójú lineáris homogén n-ed rendű differenciálegyenlet Megoldását y
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
PPP-RTK a hálózati RTK jövője?
 1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
1 PPP-RTK a hálózati RTK jövője? Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium Penc Rédey Szeminárium, BME, 006. április 6., Budapest Tartalom Emlékeztető Mérés-tér, állapot-tér PPP PPP-RTK Emlékeztető
Geofizikai kutatómódszerek I.
 Geofizikai kutatómódszerek I. A gravitációs és mágneses kutatómódszer Dr. Szabó Norbert Péter egyetemi docens Miskolci Egyetem Geofizikai Intézeti Tanszék e-mail: norbert.szabo.phd@gmail.com 1. A gravitációs
Geofizikai kutatómódszerek I. A gravitációs és mágneses kutatómódszer Dr. Szabó Norbert Péter egyetemi docens Miskolci Egyetem Geofizikai Intézeti Tanszék e-mail: norbert.szabo.phd@gmail.com 1. A gravitációs
ALGEBRAI KIFEJEZÉSEK, EGYENLETEK
 ALGEBRAI KIFEJEZÉSEK, EGYENLETEK AZ ALGEBRAI KIFEJEZÉS FOGALMÁNAK KIALAKÍTÁSA (7-9. OSZTÁLY) Racionális algebrai kifejezés (betűs kifejezés): betűket és számokat a négy alapművelet véges sokszori alkalmazásával
ALGEBRAI KIFEJEZÉSEK, EGYENLETEK AZ ALGEBRAI KIFEJEZÉS FOGALMÁNAK KIALAKÍTÁSA (7-9. OSZTÁLY) Racionális algebrai kifejezés (betűs kifejezés): betűket és számokat a négy alapművelet véges sokszori alkalmazásával
Hordozó réteg: a légi fotogrammetriában film, a földi fotogrammetriában film, vagy üveglemez.
 Távérzékelés Fényképészeti felvevőrendszerek (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Távérzékelés Fényképészeti felvevőrendszerek (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Városökológiai vizsgálatok Székesfehérváron TÁMOP B-09/1/KONV
 Városökológiai vizsgálatok Székesfehérváron TÁMOP 4.2.1.B-09/1/KONV-2010-0006 Balázsik Valéria Fény-Tér-Kép konferencia Gyöngyös, 2012. szeptember 27-28. Projekt TÁMOP 4.2.1.B-09/1/KONV-2010-0006 A felsőoktatás
Városökológiai vizsgálatok Székesfehérváron TÁMOP 4.2.1.B-09/1/KONV-2010-0006 Balázsik Valéria Fény-Tér-Kép konferencia Gyöngyös, 2012. szeptember 27-28. Projekt TÁMOP 4.2.1.B-09/1/KONV-2010-0006 A felsőoktatás
TARTALOM. Előszó 9 HALMAZOK
 TARTALOM Előszó 9 HALMAZOK Halmazokkal kapcsolatos fogalmak, részhalmazok 10 Műveletek halmazokkal 11 Számhalmazok 12 Nevezetes ponthalmazok 13 Összeszámlálás, komplementer-szabály 14 Összeszámlálás, összeadási
TARTALOM Előszó 9 HALMAZOK Halmazokkal kapcsolatos fogalmak, részhalmazok 10 Műveletek halmazokkal 11 Számhalmazok 12 Nevezetes ponthalmazok 13 Összeszámlálás, komplementer-szabály 14 Összeszámlálás, összeadási
Tartószerkezet-rekonstrukciós Szakmérnöki Képzés
 1_5. Bevezetés Végeselem-módszer Végeselem-módszer 1. A geometriai tartomány (szerkezet) felosztása (véges)elemekre.. Lokális koordináta-rendszer felvétele, kapcsolat a lokális és globális koordinátarendszerek
1_5. Bevezetés Végeselem-módszer Végeselem-módszer 1. A geometriai tartomány (szerkezet) felosztása (véges)elemekre.. Lokális koordináta-rendszer felvétele, kapcsolat a lokális és globális koordinátarendszerek
Nyugat-magyarországi Egyetem Geoinformatikai Kara. Dr. Jancsó Tamás. Fotogrammetria 10. FOT10 modul. Tájékozások
 Nyugat-magyarországi Egyetem Geoinformatikai Kara Dr. Jancsó Tamás Fotogrammetria 10. FOT10 modul Tájékozások SZÉKESFEHÉRVÁR 2010 Jelen szellemi terméket a szerzői jogról szóló 1999. évi LXXVI. törvény
Nyugat-magyarországi Egyetem Geoinformatikai Kara Dr. Jancsó Tamás Fotogrammetria 10. FOT10 modul Tájékozások SZÉKESFEHÉRVÁR 2010 Jelen szellemi terméket a szerzői jogról szóló 1999. évi LXXVI. törvény
Diszkrét matematika 1. estis képzés
 Diszkrét matematika 1. estis képzés 2019. tavasz 1. Diszkrét matematika 1. estis képzés 5. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Mérai László diái alapján
Diszkrét matematika 1. estis képzés 2019. tavasz 1. Diszkrét matematika 1. estis képzés 5. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Mérai László diái alapján
Oszcillátor tervezés kétkapu leírófüggvényekkel
 Oszcillátor tervezés kétkapu leírófüggvényekkel (Oscillator design using two-port describing functions) Infokom 2016 Mészáros Gergely, Ladvánszky János, Berceli Tibor October 13, 2016 Szélessávú Hírközlés
Oszcillátor tervezés kétkapu leírófüggvényekkel (Oscillator design using two-port describing functions) Infokom 2016 Mészáros Gergely, Ladvánszky János, Berceli Tibor October 13, 2016 Szélessávú Hírközlés
Számítási feladatok a Számítógépi geometria órához
 Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
A méretaránytényező kérdése a földmérésben és néhány szakmai következménye
 A méretaránytényező kérdése a földmérésben és néhány szakmai következménye Dr. Busics György c. egyetemi tanár Óbudai Egyetem Alba Regia Műszaki Kar Székesfehérvár MFTTT Vándorgyűlés, Békéscsaba, 2019.
A méretaránytényező kérdése a földmérésben és néhány szakmai következménye Dr. Busics György c. egyetemi tanár Óbudai Egyetem Alba Regia Műszaki Kar Székesfehérvár MFTTT Vándorgyűlés, Békéscsaba, 2019.
Nagysebességű repülőgépes távérzékelés és hozzá kapcsolódó adatfeldolgozási módszerek
 Nagysebességű repülőgépes távérzékelés és hozzá kapcsolódó adatfeldolgozási módszerek Bakó Gábor 1 Szent István Egyetem, Növénytani és Ökofiziológiai Intézet, Interspect Kutatócsoport, bakogabor@interspect.hu
Nagysebességű repülőgépes távérzékelés és hozzá kapcsolódó adatfeldolgozási módszerek Bakó Gábor 1 Szent István Egyetem, Növénytani és Ökofiziológiai Intézet, Interspect Kutatócsoport, bakogabor@interspect.hu
Polinomok, Lagrange interpoláció
 Közelítő és szimbolikus számítások 8. gyakorlat Polinomok, Lagrange interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Polinomok
Közelítő és szimbolikus számítások 8. gyakorlat Polinomok, Lagrange interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján 1. Polinomok
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN
 LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
Tanszék besorolása. Tanszék dolgozói. Oktatott tárgyak. Oktatás fejlesztése. 1. Kutatások Földmérés
 Tanszék besorolása Geomatikai oktatási és kutatási eredmények a Nyugat-Magyarországi Egyetem Erdőmérnöki Karán Tanszék bemutatása Oktatott tárgyak Tanszéki kutatások, fejlesztések Diplomatervek PhD témák
Tanszék besorolása Geomatikai oktatási és kutatási eredmények a Nyugat-Magyarországi Egyetem Erdőmérnöki Karán Tanszék bemutatása Oktatott tárgyak Tanszéki kutatások, fejlesztések Diplomatervek PhD témák
Numerikus módszerek beugró kérdések
 1. Definiálja a gépi számok halmazát (a tanult modellnek megfelelően)! Adja meg a normalizált lebegőpontos szám alakját. (4 pont) Az alakú számot normalizált lebegőpontos számnak nevezik, ha Ahol,,,. Jelöl:
1. Definiálja a gépi számok halmazát (a tanult modellnek megfelelően)! Adja meg a normalizált lebegőpontos szám alakját. (4 pont) Az alakú számot normalizált lebegőpontos számnak nevezik, ha Ahol,,,. Jelöl:
MODELLEZÉS - SZIMULÁCIÓ
 Mechatronika = Mechanikai elemek+ elektromechanikai átalakítók+ villamos rendszerek+ számítógép elemek integrációja Eszközök, rendszerek, gépek és szerkezetek felügyeletére, vezérlésére (manapság miniatürizált)
Mechatronika = Mechanikai elemek+ elektromechanikai átalakítók+ villamos rendszerek+ számítógép elemek integrációja Eszközök, rendszerek, gépek és szerkezetek felügyeletére, vezérlésére (manapság miniatürizált)
Lagrange és Hamilton mechanika
 Lagrange és 2010. október 17. Lagrange és Tartalom 1 Variáció Lagrange egyenlet Legendre transzformáció Hamilton egyenletek 2 3 Szimplektikus sokaság Hamilton mez Hamilton és Lagrange egyenletek ekvivalenciája
Lagrange és 2010. október 17. Lagrange és Tartalom 1 Variáció Lagrange egyenlet Legendre transzformáció Hamilton egyenletek 2 3 Szimplektikus sokaság Hamilton mez Hamilton és Lagrange egyenletek ekvivalenciája
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Compton-effektus. Zsigmond Anna. jegyzıkönyv. Fizika BSc III.
 Compton-effektus jegyzıkönyv Zsigmond Anna Fizika BSc III. Mérés vezetıje: Csanád Máté Mérés dátuma: 010. április. Leadás dátuma: 010. május 5. Mérés célja A kvantumelmélet egyik bizonyítékának a Compton-effektusnak
Compton-effektus jegyzıkönyv Zsigmond Anna Fizika BSc III. Mérés vezetıje: Csanád Máté Mérés dátuma: 010. április. Leadás dátuma: 010. május 5. Mérés célja A kvantumelmélet egyik bizonyítékának a Compton-effektusnak
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 7. Digitális térképezés, georeferálás, vektorizálás Digitális térkép Fogalma Jellemzői Georeferálás
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 7. Digitális térképezés, georeferálás, vektorizálás Digitális térkép Fogalma Jellemzői Georeferálás
x a x, ha a > 1 x a x, ha 0 < a < 1
 EL 18 Valós exponenciális függvények Definíció: Ha a R, a>0, akkor legyen a x = e x lna, x R A valós változós exponenciális függvények grafikonja: x a x, ha a > 1 x a x, ha 0 < a < 1 A szinusz függvény
EL 18 Valós exponenciális függvények Definíció: Ha a R, a>0, akkor legyen a x = e x lna, x R A valós változós exponenciális függvények grafikonja: x a x, ha a > 1 x a x, ha 0 < a < 1 A szinusz függvény
Matematika szigorlat, Mérnök informatikus szak I máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.
 Matematika szigorlat, Mérnök informatikus szak I. 2009. máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.: 180 perc 0-49 pont: elégtelen, 50-61 pont: elégséges, 62-73 pont:
Matematika szigorlat, Mérnök informatikus szak I. 2009. máj. 12. Név: Nept. kód: Idő: 1. f. 2. f. 3. f. 4. f. 5. f. 6. f. Össz.: Oszt.: 180 perc 0-49 pont: elégtelen, 50-61 pont: elégséges, 62-73 pont:
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
1. ábra Egy terület DTM-je (balra) és ugyanazon terület DSM-je (jobbra)
 és ugyanazon terület DSM-je (jobbra)") Bevezetés A digitális terepmodell (DTM) a Föld felszínének digitális, 3D-ós reprezentációja. Az automatikus DTM előállítás folyamata jelenti egyrészt távérzékelt felvételekből a magassági adatok kinyerését,
Bevezetés A digitális terepmodell (DTM) a Föld felszínének digitális, 3D-ós reprezentációja. Az automatikus DTM előállítás folyamata jelenti egyrészt távérzékelt felvételekből a magassági adatok kinyerését,
Robotika. Kinematika. Magyar Attila
 Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
Wavelet transzformáció
 1 Wavelet transzformáció Más felbontás: Walsh, Haar, wavelet alapok! Eddig: amplitúdó vagy frekvencia leírás: Pl. egy rövid, Dirac-delta jellegű impulzus Fourier-transzformált: nagyon sok, kb. ugyanolyan
1 Wavelet transzformáció Más felbontás: Walsh, Haar, wavelet alapok! Eddig: amplitúdó vagy frekvencia leírás: Pl. egy rövid, Dirac-delta jellegű impulzus Fourier-transzformált: nagyon sok, kb. ugyanolyan
Mat. A2 3. gyakorlat 2016/17, második félév
 Mat. A2 3. gyakorlat 2016/17, második félév 1. Hány megoldása lehet az alábbi lineáris egyenletrendszereknek a valós számok körében, ha a -ok tetszőleges (nem feltétlenül egyenlő) számokat jelölnek? 0
Mat. A2 3. gyakorlat 2016/17, második félév 1. Hány megoldása lehet az alábbi lineáris egyenletrendszereknek a valós számok körében, ha a -ok tetszőleges (nem feltétlenül egyenlő) számokat jelölnek? 0
Lin.Alg.Zh.1 feladatok
 LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
LinAlgZh1 feladatok 01 3d vektorok Adott három vektor ā = (0 2 4) b = (1 1 4) c = (0 2 4) az R 3 Euklideszi vektortérben egy ortonormált bázisban 1 Mennyi az ā b skalárszorzat? 2 Mennyi az n = ā b vektoriális
A távérzékelés és fizikai alapjai 4. Technikai alapok
 A távérzékelés és fizikai alapjai 4. Technikai alapok Csornai Gábor László István Budapest Főváros Kormányhivatala Mezőgazdasági Távérzékelési és Helyszíni Ellenőrzési Osztály Az előadás 2011-es átdolgozott
A távérzékelés és fizikai alapjai 4. Technikai alapok Csornai Gábor László István Budapest Főváros Kormányhivatala Mezőgazdasági Távérzékelési és Helyszíni Ellenőrzési Osztály Az előadás 2011-es átdolgozott
Feladatok a Gazdasági matematika II. tárgy gyakorlataihoz
 Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
Debreceni Egyetem Közgazdaságtudományi Kar Feladatok a Gazdasági matematika II tárgy gyakorlataihoz a megoldásra ajánlott feladatokat jelöli e feladatokat a félév végére megoldottnak tekintjük a nehezebb
MATEMATIKA TANMENET. 9. osztály. 4 óra/hét. Budapest, 2014. szeptember
 MATEMATIKA TANMENET 9. osztály 4 óra/hét Budapest, 2014. szeptember 2 Évi óraszám: 144 óra Heti óraszám: 4 óra Ismerkedés, év elejei feladatok, szintfelmérő írása 2 óra I. Kombinatorika, halmazok 13 óra
MATEMATIKA TANMENET 9. osztály 4 óra/hét Budapest, 2014. szeptember 2 Évi óraszám: 144 óra Heti óraszám: 4 óra Ismerkedés, év elejei feladatok, szintfelmérő írása 2 óra I. Kombinatorika, halmazok 13 óra
Gazdasági matematika II. vizsgadolgozat megoldása, június 10
 Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Gazdasági matematika II. vizsgadolgozat megoldása, 204. június 0 A dolgozatírásnál íróeszközön kívül más segédeszköz nem használható. A dolgozat időtartama: 90 perc. Ha a dolgozat első részéből szerzett
Képrekonstrukció 3. előadás
 Képrekonstrukció 3. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Computed Tomography (CT) Elv: Röntgen-sugarak áthatolása 3D objektum 3D térfogati kép Mérések
Képrekonstrukció 3. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Computed Tomography (CT) Elv: Röntgen-sugarak áthatolása 3D objektum 3D térfogati kép Mérések
A Föld alakja TRANSZFORMÁCIÓ. Magyarországon még használatban lévő vetületi rendszerek. Miért kell transzformálni? Főbb transzformációs lehetőségek
 TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
A bifiláris felfüggesztésű rúd mozgásáról
 1 A bifiláris felfüggesztésű rúd mozgásáról A végein fonállal felfüggesztett egyenes rúd részleges erőtani vizsgálatát mutattuk be egy korábbi dolgozatunkban, melynek címe: Forgatónyomaték mérése - I.
1 A bifiláris felfüggesztésű rúd mozgásáról A végein fonállal felfüggesztett egyenes rúd részleges erőtani vizsgálatát mutattuk be egy korábbi dolgozatunkban, melynek címe: Forgatónyomaték mérése - I.
Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány. Verőné Dr. Wojtaszek Malgorzata
 Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány Verőné Dr. Wojtaszek Malgorzata Az előadás felépítése Trendek a Föld megfigyelésében (hol kezdődött, merre tart ) Távérzékelés
Távérzékelés a precíziós gazdálkodás szolgálatában : látvány vagy tudomány Verőné Dr. Wojtaszek Malgorzata Az előadás felépítése Trendek a Föld megfigyelésében (hol kezdődött, merre tart ) Távérzékelés
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 9. Távérzékelési adatok alkalmazása Érzékelők Hullámhossz tartományok Visszaverődés Infra felvételek,
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 9. Távérzékelési adatok alkalmazása Érzékelők Hullámhossz tartományok Visszaverődés Infra felvételek,
Matematika tanmenet 10. évfolyam 2018/2019
 Matematika tanmenet 10. évfolyam 2018/2019 Műveltségi terület: MATEMATIKA Iskola, osztályok: Vetési Albert Gimnázium, 10.A, 10.B, 10.C, 10.D Tantárgy: MATEMATIKA Heti óraszám: 3 óra Készítette: a matematika
Matematika tanmenet 10. évfolyam 2018/2019 Műveltségi terület: MATEMATIKA Iskola, osztályok: Vetési Albert Gimnázium, 10.A, 10.B, 10.C, 10.D Tantárgy: MATEMATIKA Heti óraszám: 3 óra Készítette: a matematika
Matematika tanmenet 12. osztály (heti 4 óra)
") Matematika tanmenet 12. osztály (heti 4 óra) Tankönyv: Ábrahám Gábor Dr. Kosztolányiné Nagy Erzsébet Tóth Julianna: Matematika 12. középszint Példatárak: Fuksz Éva Riener Ferenc: Érettségi feladatgyűjtemény
Matematika tanmenet 12. osztály (heti 4 óra) Tankönyv: Ábrahám Gábor Dr. Kosztolányiné Nagy Erzsébet Tóth Julianna: Matematika 12. középszint Példatárak: Fuksz Éva Riener Ferenc: Érettségi feladatgyűjtemény
Digitális Domborzat Modellek (DTM)
") Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) DTM fogalma A földfelszín számítógéppel kezelhető topográfiai modellje Cél: tetszőleges pontban
Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) Digitális Domborzat Modellek (DTM) DTM fogalma A földfelszín számítógéppel kezelhető topográfiai modellje Cél: tetszőleges pontban
Lin.Alg.Zh.1 feladatok
 Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
Lin.Alg.Zh. feladatok 0.. d vektorok Adott három vektor ā (0 b ( c (0 az R Euklideszi vektortérben egy ortonormált bázisban.. Mennyi az ā b skalárszorzat? ā b 0 + + 8. Mennyi az n ā b vektoriális szorzat?
OSZTÁLYOZÓVIZSGA TÉMAKÖRÖK 9. OSZTÁLY
 OSZTÁLYOZÓVIZSGA TÉMAKÖRÖK 9. OSZTÁLY ALGEBRA ÉS SZÁMELMÉLET Halmazok Halmazműveletek Halmazok elemszáma Logikai szita Számegyenesek intervallumok Gráfok Betűk használata a matematikában Hatványozás. A
OSZTÁLYOZÓVIZSGA TÉMAKÖRÖK 9. OSZTÁLY ALGEBRA ÉS SZÁMELMÉLET Halmazok Halmazműveletek Halmazok elemszáma Logikai szita Számegyenesek intervallumok Gráfok Betűk használata a matematikában Hatványozás. A
First Prev Next Last Go Back Full Screen Close Quit. Komplex számok (2)
") 2. előadás Komplex számok (2) 1. A a + bi (a, b) kölcsönösen egyértelmű megfeleltetés lehetővé teszi, hogy a komplex számokat a sík pontjaival, illetve helyvektoraival ábrázoljuk. A derékszögű koordináta
2. előadás Komplex számok (2) 1. A a + bi (a, b) kölcsönösen egyértelmű megfeleltetés lehetővé teszi, hogy a komplex számokat a sík pontjaival, illetve helyvektoraival ábrázoljuk. A derékszögű koordináta
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
 Távérzékelés Aktív érzékelők (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési
Távérzékelés Aktív érzékelők (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési és Távérzékelési