A játékfejlesztés több területből áll. A kódolás csupán egy része a munkáknak.
|
|
|
- Alíz Takács
- 5 évvel ezelőtt
- Látták:
Átírás
1 1
2 A játékfejlesztés több területből áll. A kódolás csupán egy része a munkáknak. Példák az elvégzendő feladatokra: Tervezés Kódolás Modellezés Textúrázás Pályaszerkesztés Animálás... Többnyire minden terület tovább bontható további részterületekre. 2
3 Az elvégzendő feladatokat eszközök segítik. Ezen eszközök két kategóriába sorolhatóak: Runtime Olyan eszközök, melyek futási időben kerülnek felhasználásra. Offline Olyan eszközök, melyek a játék futása során nem kerülnek felhasználásra. 3



4 3D Studio Max Maya Blender (ingyenesen használható bármilyen célra) 4


5 Photoshop Gimp (ingyenesen használható bármilyen célra) 5


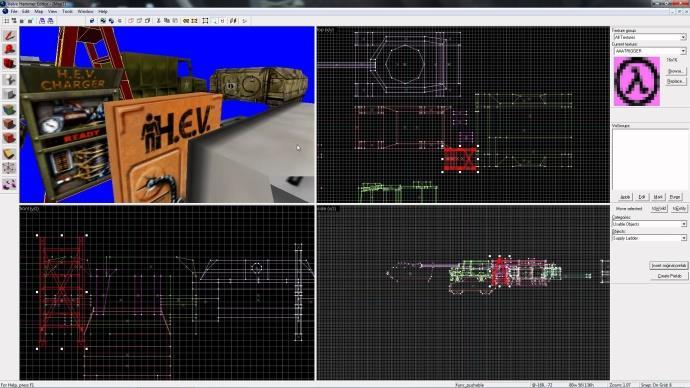
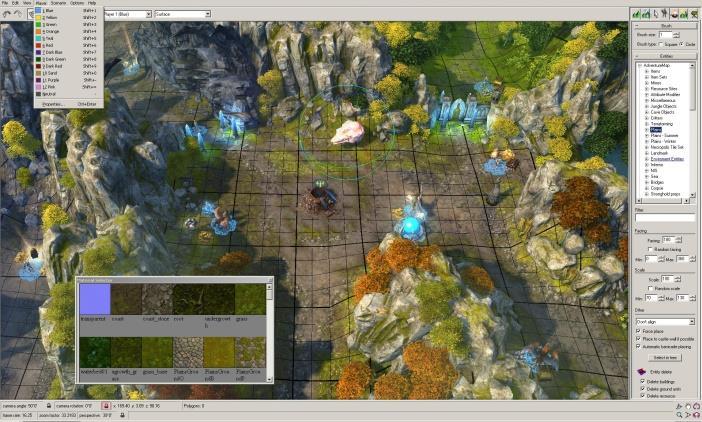
6 Unreal Development Kit (UDK) Valve Hammer Editor Might & Magic: Heroes VI 6
7 Shader szerkesztő szoftverek Zeneszerkesztő szoftverek Pl.: Audacity (ingyenes) Material szerkesztő szoftverek Többnyire tartalmazzák a modellező, vagy pályaszerkesztő szoftverek Részecskerendszer szerkesztő szoftverek... 7
8 Nyersanyag (asset, resource) importálása (exportálása) a játékba (játékból) 3D modell Textúra Zene Pálya Részecskerendszer Material Shader Animáció... 8
9 Matematikai könyvtár Hálózati kommunikáció kezelés (TCP, UDP, stb.) Fizika Ütközésdetektálás Részecskerendszer Mechanika Statika Hanglejátszás Rajzoló rutinok Animációlejátszás... 9
10 10
11 inicializálás() A függvény célja, hogy betöltse az alkalmazás futtatásához szükséges nyersanyagokat, valamint, hogy inicializálja a megfelelő változókat, alrendszereket. inicializálás(); while (játékfut()) { eseménykezelés(); animálás(); fizikaszámolás(); rajzolás(); } felszabadítás(); A fő ciklusban végrehajtott függvények listája nem teljes. Több funkció is elképzelhető. 11
12 eseménykezelés() A függvény kezeli le a játékos interakcióit. Egér Billentyűzet Joystick stb. inicializálás(); while (játékfut()) { eseménykezelés(); animálás(); fizikaszámolás(); rajzolás(); } felszabadítás(); A fő ciklusban végrehajtott függvények listája nem teljes. Több funkció is elképzelhető. 12
13 animálás() A függvény meghatározza az animált objektumok következő állapotát. inicializálás(); while (játékfut()) { eseménykezelés(); animálás(); fizikaszámolás(); rajzolás(); } felszabadítás(); A fő ciklusban végrehajtott függvények listája nem teljes. Több funkció is elképzelhető. 13
14 fizikaszámolás() A függvény számolja a betöltött világ fizikáját. Szabadesés Csúszás stb. inicializálás(); while (játékfut()) { eseménykezelés(); animálás(); fizikaszámolás(); rajzolás(); } felszabadítás(); A fő ciklusban végrehajtott függvények listája nem teljes. Több funkció is elképzelhető. 14
15 rajzolás() A függvény rajzolja ki a betöltött világot a képernyőre. inicializálás(); while (játékfut()) { eseménykezelés(); animálás(); fizikaszámolás(); rajzolás(); } felszabadítás(); A fő ciklusban végrehajtott függvények listája nem teljes. Több funkció is elképzelhető. 15
16 felszabadítás() Az init() ellentéte. Felszabadítja a lefoglalt erőforrásokat. inicializálás(); while (játékfut()) { eseménykezelés(); animálás(); fizikaszámolás(); rajzolás(); } felszabadítás(); A fő ciklusban végrehajtott függvények listája nem teljes. Több funkció is elképzelhető. 16
17 17
18 Rajzoláskor a videokártya minden csúcson végrehajt valamilyen transzformációt. Mire jó? Ugyanaz az objektum kirajzolható több helyre méretben Szemszögből A transzformációk nem a CPU-n, hanem a sokmagos GPUn hajtódnak végre, ezáltal gyorsabb (párhuzamos végrehajtás) Projekció 2D / 3D grafikában minden transzformáció egy mátrixműveletnek felel meg. 18
19 v 2 v 1 t t V 2 v 0 t V 1 V 0 19
20 V 2 v 2 V 0 V 1 v 1 v 0 20
21 V 1 V 2 V 2 V 1 V 0 V 0 21
22 Mátrix szorzása skalárral Mátrixok összeadása Csak ugyanolyan méretű mátrixot tudunk összeadni 22

23 Mátrix szorzása mátrixszal N x M méretű mátrixot csak M x P méretűvel lehet beszorozni Az eredmény N x P méretű mátrix A művelet nem kommutatív: A * B!= B * A A művelet asszociatív: A * (B * C) = (A * B) * C 23
24 N dimenziós koordinátát N x N méretű négyzetes mátrixszal is lehet transzformálni (Lineáris algebra). A transzformációs mátrix sorai az új koordinátarendszer tengelyei a régi koordinátarendszerben. 24
25 Egységmátrix (identity matrix) 25
26 Eltolás (translation) Összeadás 26
27 Átméretezés az origo középpontjából (scale) Szorzás 27
28 Forgatás 2 dimenzióban az origó körül (rotate) Szorzás cos α sin α sin α cos α Forgatás 3 dimenzióban az origó körül (rotate) 28
 M * v = R * S * R * R * v = R * (S * (R * (R * v))) Probléma Szorzás Eltolás művelete?")
29 CPU M transzformációs mátrix kiszámolása egy objektumra R forgatás (rotate) S átméretezés (scale) M = R * S * R * R GPU Minden csúcs beszorzása a transzformációs mátrixszal Párhuzamos végrehajtás (Single Instruction Multiple Data) M * v = R * S * R * R * v = R * (S * (R * (R * v))) Probléma Szorzás Eltolás művelete? Összeadás 29
30 A koordináták újabb komponenssel egészülnek ki Homogén koordináta: w 2D: (x, y) -> (w * x, w * y, w) 3D: (x, y, z) -> (w * x, w * y, w * z, w) w értéke általában 1 2D: (x, y) -> (x, y, 1) 3D: (x, y, z) -> (x, y, z, 1) 30
31 2D 3D 31

32 32
33 A segítségével különböző mesterséges, vagy élethű transzformációkat tudunk végrehajtani Ortografikus (merőleges) vetítés A távoli és a közeli dolgok ugyanakkorák Perspektivikus vetítés A párhuzamos élek a végtelenben összetartanak A távoli dolgok kisebbnek látszanak, mint a közeliek Homogénkoordináta bevezetésével lehetséges 33
34 34
35 Ugyanannak a 3D modellnek a kirajzolása...több helyre...több méretben...több irányból A modellt csak egyszer szükséges betölteni A különböző rajzolási transzformációknak elég csak egyegy mátrixot létrehozni 3D modell 3D transzformációs modell 3D transzformációs modell 3D transzformációs modell 35
36 36

37 Olyan doboz, mely magába foglalja az objektumot A doboz élei egymásra merőlegesek Axis Aligned Bounding Box A doboz minden éle a Descartes-koordinátarendszer valamelyik tengelyével párhuzamos Non Axis Aligned Bounding Box A doboz élei nem feltétlenül párhuzamos a Descartes-koordinátarendszer valamelyik tengelyével 37
38 Min(A,C) A C B Max(B,D) D A két objektum (AB és CD) ütközik (fedi egymást), ha Max(B,D) - Min(A,C) <= (B - C) + (D C) Vagyis, ha a mindkét objektumot befoglaló egyenes kisebb, mint a két egyenes külön-külön. 38
39 39
40 del, majd enter kijelölt objektum törlése tab váltás az aktuális és a szerkesztés mód között space felugró parancsablak Csak szerkesztés módban Subdivide Csak objektum módban Add Cube / Monkey / UV Sphere / Cylinder / Torus stb. Minden módban Shade Smooth Shade Flat a minden objektum / csúcs / lap kijelölése n jobb oldali transzformációs panel megjelenítése / eltüntetése egér jobb klikk egér alatt levő objektum kijelölése (shift nyomvatartásával több objektum is kijelölhető) középső egérgomb + egér mozgatása kamera forgatása egér görgő kamera közelítés / távolítása shift + középső egérgomb + egér mozgatása kamera mozgatása a síkjában 40
41 File / Export / Wavefron (.obj) Bal alul Export obj lenyíló menüben különböző beállítási lehetőségek (a lényegesek felsorolva) Animation Az animáció összes kockáját lementi külön obj fájlokba. Selection only Csak az éppen kijelölés alatt álló objektumot menti el. Write normals Elmenti a csúcsok normálvektorait. Include Uvs Elmenti a csúcsok textúrakoordinátáit. 41
OpenGL és a mátrixok
 OpenGL és a mátrixok Róth Gergő 2013. március 4. Róth Gergő 1/20 A rajzoláskor a videókártya minden csúcson végrehajt egy transzformációt. Mire jó? Kamera helyének beállítása Egy objektum több pozícióra
OpenGL és a mátrixok Róth Gergő 2013. március 4. Róth Gergő 1/20 A rajzoláskor a videókártya minden csúcson végrehajt egy transzformációt. Mire jó? Kamera helyének beállítása Egy objektum több pozícióra
Róth Gergő.
 Róth Gergő roth@dcs.uni-pannon.hu 1 Oktatók Smidla József (smidla@dcs.uni-pannon.hu) Róth Gergő (roth@dcs.uni-pannon.hu) Bejárás nem kötelező Tárgy adatai Gyakorlati Nem kötelező Szabadon választható Neptun
Róth Gergő roth@dcs.uni-pannon.hu 1 Oktatók Smidla József (smidla@dcs.uni-pannon.hu) Róth Gergő (roth@dcs.uni-pannon.hu) Bejárás nem kötelező Tárgy adatai Gyakorlati Nem kötelező Szabadon választható Neptun
Róth Gergő. roth@dcs.uni-pannon.hu
 Róth Gergő roth@dcs.uni-pannon.hu 1 Oktatók Smidla József (smidla@dcs.uni-pannon.hu) Róth Gergő (roth@dcs.uni-pannon.hu) Bejárás nem kötelező Tárgy adatai Gyakorlati Nem kötelező Szabadon választható Neptun
Róth Gergő roth@dcs.uni-pannon.hu 1 Oktatók Smidla József (smidla@dcs.uni-pannon.hu) Róth Gergő (roth@dcs.uni-pannon.hu) Bejárás nem kötelező Tárgy adatai Gyakorlati Nem kötelező Szabadon választható Neptun
Róth Gergő. roth@dcs.uni-pannon.hu
 Róth Gergő roth@dcs.uni-pannon.hu 1 Oktatók Smidla József (smidla@dcs.uni-pannon.hu) Róth Gergő (roth@dcs.uni-pannon.hu) Bejárás nem kötelező Tárgy adatai Gyakorlati Nem kötelező Szabadon választható Neptun
Róth Gergő roth@dcs.uni-pannon.hu 1 Oktatók Smidla József (smidla@dcs.uni-pannon.hu) Róth Gergő (roth@dcs.uni-pannon.hu) Bejárás nem kötelező Tárgy adatai Gyakorlati Nem kötelező Szabadon választható Neptun
1. Bevezetés 1. Köszönetnyilvánítás 1. 2. A számítógépes játékfejlesztésről 3
 1. Bevezetés 1 Köszönetnyilvánítás 1 2. A számítógépes játékfejlesztésről 3 2.1. Néhány tanács játékfejlesztőknek 3 2.2. Hogyan fogjunk saját játék írásához? 4 2.3. A számítógépes játék főbb elemei 9 3.
1. Bevezetés 1 Köszönetnyilvánítás 1 2. A számítógépes játékfejlesztésről 3 2.1. Néhány tanács játékfejlesztőknek 3 2.2. Hogyan fogjunk saját játék írásához? 4 2.3. A számítógépes játék főbb elemei 9 3.
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
3D koordináta-rendszerek
 3D koordináta-rendszerek z z y x y x y balkezes bal-sodrású x jobbkezes jobb-sodrású z 3D transzformációk - homogén koordináták (x, y, z) megadása homogén koordinátákkal: (x, y, z, 1) (x, y, z, w) = (x,
3D koordináta-rendszerek z z y x y x y balkezes bal-sodrású x jobbkezes jobb-sodrású z 3D transzformációk - homogén koordináták (x, y, z) megadása homogén koordinátákkal: (x, y, z, 1) (x, y, z, w) = (x,
Transzformációk. Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform
 Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Flynn féle osztályozás Single Isntruction Multiple Instruction Single Data SISD SIMD Multiple Data MISD MIMD
 M5-. A lineáris algebra párhuzamos algoritmusai. Ismertesse a párhuzamos gépi architektúrák Flynn-féle osztályozását. A párhuzamos lineáris algebrai algoritmusok között mi a BLAS csomag célja, melyek annak
M5-. A lineáris algebra párhuzamos algoritmusai. Ismertesse a párhuzamos gépi architektúrák Flynn-féle osztályozását. A párhuzamos lineáris algebrai algoritmusok között mi a BLAS csomag célja, melyek annak
Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D
 Vetítések Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D Vetítések fajtái - 1 perspektívikus A párhuzamos A A' B A' B A vetítés középpontja B' Vetítési
Vetítések Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D Vetítések fajtái - 1 perspektívikus A párhuzamos A A' B A' B A vetítés középpontja B' Vetítési
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Transzformációk. Szécsi László
 Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
Transzformációk Szécsi László A feladat Adott a 3D modell háromszögek csúcspontjai [modellezési koordináták] Háromszögkitöltő algoritmus pixeleket színez be [viewport koordináták] A feladat: számítsuk
Tartalom Képernyő részei... 2
 Tartalom Képernyő részei... 2 Sötétszürke menü részei... 2 1. Menü kibontása... 2 2. Eszközök... 3 3. Műveletek... 3 Világosszürke menü részei... 4 Kijelölés... 4 Okos kijelölés... 5 Körülvágás... 6 Vegyes
Tartalom Képernyő részei... 2 Sötétszürke menü részei... 2 1. Menü kibontása... 2 2. Eszközök... 3 3. Műveletek... 3 Világosszürke menü részei... 4 Kijelölés... 4 Okos kijelölés... 5 Körülvágás... 6 Vegyes
Plakátok, részecskerendszerek. Szécsi László
 Plakátok, részecskerendszerek Szécsi László Képalapú festés Montázs: képet képekből 2D grafika jellemző eszköze modell: kép [sprite] 3D 2D képével helyettesítsük a komplex geometriát Image-based rendering
Plakátok, részecskerendszerek Szécsi László Képalapú festés Montázs: képet képekből 2D grafika jellemző eszköze modell: kép [sprite] 3D 2D képével helyettesítsük a komplex geometriát Image-based rendering
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
17. előadás: Vektorok a térben
 17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
17. előadás: Vektorok a térben Szabó Szilárd A vektor fogalma A mai előadásban n 1 tetszőleges egész szám lehet, de az egyszerűség kedvéért a képletek az n = 2 esetben szerepelnek. Vektorok: rendezett
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes geometria
 2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
2011 sz A grakus szállítószalag terv a geometriai (matematikai) modell megalkotása modelltranszformáció (3D 3D) vetítés (3D 2D) képtranszformáció (2D 2D)... raszterizáció A grakus szállítószalag: koncepció
I. VEKTOROK, MÁTRIXOK
 217/18 1 félév I VEKTOROK, MÁTRIXOK I1 I2 Vektorok 1 A síkon derékszögű koordinátarendszerben minden v vektornak van vízszintes és van függőleges koordinátája, ezeket sorrendben v 1 és v 2 jelöli A v síkbeli
217/18 1 félév I VEKTOROK, MÁTRIXOK I1 I2 Vektorok 1 A síkon derékszögű koordinátarendszerben minden v vektornak van vízszintes és van függőleges koordinátája, ezeket sorrendben v 1 és v 2 jelöli A v síkbeli
Valasek Gábor valasek@inf.elte.hu
 Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2013/2014. őszi félév ( Eötvös LorándSzámítógépes TudományegyetemInformatikai Grafika Kar) 2013/2014.
Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2013/2014. őszi félév ( Eötvös LorándSzámítógépes TudományegyetemInformatikai Grafika Kar) 2013/2014.
1. Mátrixösszeadás és skalárral szorzás
 1 Mátrixösszeadás és skalárral szorzás Mátrixok tömör jelölése T test Az M = a i j T n m azt az n sorból és m oszlopból álló mátrixot jelöli, amelyben az i-edik sor j-edik eleme a i j T Példák [ ] Ha M
1 Mátrixösszeadás és skalárral szorzás Mátrixok tömör jelölése T test Az M = a i j T n m azt az n sorból és m oszlopból álló mátrixot jelöli, amelyben az i-edik sor j-edik eleme a i j T Példák [ ] Ha M
A MATLAB alapjai. Kezdő lépések. Változók. Aktuális mappa Parancs ablak. Előzmények. Részei. Atomerőművek üzemtana
 A MATLAB alapjai Kezdő lépések - Matlab Promt: >> - Help: >> help sqrt >> doc sqrt - Kilépés: >> quit >> exit >> Futó script leállítása: >> ctrl+c - Változók listásása >> who >> whos - Változók törlése
A MATLAB alapjai Kezdő lépések - Matlab Promt: >> - Help: >> help sqrt >> doc sqrt - Kilépés: >> quit >> exit >> Futó script leállítása: >> ctrl+c - Változók listásása >> who >> whos - Változók törlése
Transzformációk síkon, térben
 Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Transzformációk síkon, térben Leképezés, transzformáció Leképezés: Ha egy A ponttér pontjaihoz egy másik B ponttér pontjait kölcsönösen egyértelműen rendeljük hozzá, akkor ezt a hozzárendelést leképezésnek
Valasek Gábor Informatikai Kar. 2016/2017. tavaszi félév
 Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes
Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Tartalom 1 Motiváció 2 Transzformációk Transzformációk általában 3 Nevezetes
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport
 Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Lineáris algebra zárthelyi dolgozat javítókulcs, Informatika I. 2005.márc.11. A csoport 1. Egy egyenesre esnek-e az A (2, 5, 1), B (5, 17, 7) és C (3, 9, 3) pontok? 5 pont Megoldás: Nem, mert AB (3, 12,
Térbeli transzformációk, a tér leképezése síkra
 Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
12. előadás. Egyenletrendszerek, mátrixok. Dr. Szörényi Miklós, Dr. Kallós Gábor
 12. előadás Egyenletrendszerek, mátrixok Dr. Szörényi Miklós, Dr. Kallós Gábor 2015 2016 1 Tartalom Matematikai alapok Vektorok és mátrixok megadása Tömbkonstansok Lineáris műveletek Mátrixok szorzása
12. előadás Egyenletrendszerek, mátrixok Dr. Szörényi Miklós, Dr. Kallós Gábor 2015 2016 1 Tartalom Matematikai alapok Vektorok és mátrixok megadása Tömbkonstansok Lineáris műveletek Mátrixok szorzása
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
Összeállította: dr. Leitold Adrien egyetemi docens
 Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Az R 3 tér geometriája Összeállította: dr. Leitold Adrien egyetemi docens 2008.09.08. 1 Vektorok Vektor: irányított szakasz Jel.: a, a, a, AB, Jellemzői: irány, hosszúság, (abszolút érték) jel.: a Speciális
Tartalom. Nevezetes affin transzformációk. Valasek Gábor 2016/2017. tavaszi félév
 Tartalom Motiváció Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Transzformációk Transzformációk általában Nevezetes affin
Tartalom Motiváció Számítógépes Grafika Valasek Gábor valasek@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2016/2017. tavaszi félév Transzformációk Transzformációk általában Nevezetes affin
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
Vektorgeometria (1) First Prev Next Last Go Back Full Screen Close Quit 1. A térbeli irányított szakaszokat vektoroknak hívjuk. Két vektort egyenlőnek tekintünk, ha párhuzamos eltolással fedésbe hozhatók.
Számítási feladatok a Számítógépi geometria órához
 Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Számítási feladatok a Számítógépi geometria órához Kovács Zoltán Copyright c 2012 Last Revision Date: 2012. október 15. kovacsz@nyf.hu Technikai útmutató a jegyzet használatához A jegyzet képernyőbarát
Matematika A1a Analízis
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Matematika A1a Analízis BMETE90AX00 Vektorok StKis, EIC 2019-02-12 Wettl Ferenc ALGEBRA
Geometriai modellezés. Szécsi László
 Geometriai modellezés Szécsi László Adatáramlás vezérlés Animáció világleírás Modellezés kamera Virtuális világ kép Képszintézis A modellezés részfeladatai Geometria megadása [1. előadás] pont, görbe,
Geometriai modellezés Szécsi László Adatáramlás vezérlés Animáció világleírás Modellezés kamera Virtuális világ kép Képszintézis A modellezés részfeladatai Geometria megadása [1. előadás] pont, görbe,
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 2 3 Geometriai modellezés feladata A világunkat modellezni kell a térben. Valamilyen koordinátarendszer
Számítógépes Grafika SZIE YMÉK
 Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
1. A komplex számok ábrázolása
 1. komplex számok ábrázolása Vektorok és helyvektorok. Ismétlés sík vektorai irányított szakaszok, de két vektor egyenlő, ha párhuzamosak, egyenlő hosszúak és irányúak. Így minden vektor kezdőpontja az
1. komplex számok ábrázolása Vektorok és helyvektorok. Ismétlés sík vektorai irányított szakaszok, de két vektor egyenlő, ha párhuzamosak, egyenlő hosszúak és irányúak. Így minden vektor kezdőpontja az
Matematika (mesterképzés)
") Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
Matematika (mesterképzés) Környezet- és Településmérnököknek Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Vinczéné Varga A. Környezet- és Településmérnököknek 2016/2017/I 1 / 29 Lineáris tér,
2D képszintézis. Szirmay-Kalos László
 2D képszintézis Szirmay-Kalos László 2D képszintézis Modell szín (200, 200) Kép Kamera ablak (window) viewport Unit=pixel Saját színnel rajzolás Világ koordinátarendszer Pixel vezérelt megközelítés: Tartalmazás
2D képszintézis Szirmay-Kalos László 2D képszintézis Modell szín (200, 200) Kép Kamera ablak (window) viewport Unit=pixel Saját színnel rajzolás Világ koordinátarendszer Pixel vezérelt megközelítés: Tartalmazás
Mesh from file, OrthoCamera, PerspectiveCamera. Szécsi László 3D Grafikus Rendszerek 3. labor
 Mesh from file, OrthoCamera, PerspectiveCamera Szécsi László 3D Grafikus Rendszerek 3. labor OrthoCamera.js const OrthoCamera = function() { this.position = new Vec2(0.5, 0); this.rotation = 0; this.windowsize
Mesh from file, OrthoCamera, PerspectiveCamera Szécsi László 3D Grafikus Rendszerek 3. labor OrthoCamera.js const OrthoCamera = function() { this.position = new Vec2(0.5, 0); this.rotation = 0; this.windowsize
Raszter georeferálás QGIS-ben Összeállította: dr. Siki Zoltán verzióra aktualizálta: Jáky András
 Raszter georeferálás QGIS-ben Összeállította: dr. Siki Zoltán 2.18.3. verzióra aktualizálta: Jáky András (jakyandras@gmail.com) Ez a leírás ahhoz nyújt segítséget, hogy szkennelt térképet vagy ortofotót
Raszter georeferálás QGIS-ben Összeállította: dr. Siki Zoltán 2.18.3. verzióra aktualizálta: Jáky András (jakyandras@gmail.com) Ez a leírás ahhoz nyújt segítséget, hogy szkennelt térképet vagy ortofotót
Feladatok. Tervek alapján látvány terv készítése. Irodai munka Test modellezés. Létező objektum számítógépes modelljének elkészítése
 Virtuális valóság Feladatok Tervek alapján látvány terv készítése Irodai munka Test modellezés Létező objektum számítógépes modelljének elkészítése Geodéziai mérések Fotogrammetriai feldolgozás Egyszerű
Virtuális valóság Feladatok Tervek alapján látvány terv készítése Irodai munka Test modellezés Létező objektum számítógépes modelljének elkészítése Geodéziai mérések Fotogrammetriai feldolgozás Egyszerű
Space Invaders Dokumenta cio
 Space Invaders Dokumenta cio 0. Tartalomjegyzék 0. Tartalomjegyzék... 1 1. Követelmény feltárás... 2 1.1. Célkitűzés, projektindító dokumentum... 2 1.2. Szakterületi tartalomjegyzék... 2 1.3. Használatieset-modell,
Space Invaders Dokumenta cio 0. Tartalomjegyzék 0. Tartalomjegyzék... 1 1. Követelmény feltárás... 2 1.1. Célkitűzés, projektindító dokumentum... 2 1.2. Szakterületi tartalomjegyzék... 2 1.3. Használatieset-modell,
1. Jelgenerálás, megjelenítés, jelfeldolgozás alapfunkciói
 1. Jelgenerálás, megjelenítés, jelfeldolgozás alapfunkciói FELADAT Készítsen egy olyan tömböt, amelynek az elemeit egy START gomb megnyomásakor feltölt a program 1 periódusnyi szinuszosan változó értékekkel.
1. Jelgenerálás, megjelenítés, jelfeldolgozás alapfunkciói FELADAT Készítsen egy olyan tömböt, amelynek az elemeit egy START gomb megnyomásakor feltölt a program 1 periódusnyi szinuszosan változó értékekkel.
Lineáris algebra (10A103)
") Lineáris algebra (10A103 Kátai-Urbán Kamilla Tudnivalók Honlap: http://www.math.u-szeged.hu/~katai Jegyzet: Megyesi László: Lineáris algebra. Vizsga: írásbeli (beugróval, feltétele a Lineáris algebra gyakorlat
Lineáris algebra (10A103 Kátai-Urbán Kamilla Tudnivalók Honlap: http://www.math.u-szeged.hu/~katai Jegyzet: Megyesi László: Lineáris algebra. Vizsga: írásbeli (beugróval, feltétele a Lineáris algebra gyakorlat
Tárgymutató. dinamika, 5 dinamikai rendszer, 4 végtelen sok állapotú, dinamikai törvény, 5 dinamikai törvények, 12 divergencia,
 Tárgymutató állapottér, 3 10, 107 általánosított impulzusok, 143 147 általánosított koordináták, 143 147 áramlás, 194 197 Arisztotelész mozgástörvényei, 71 77 bázisvektorok, 30 centrifugális erő, 142 ciklikus
Tárgymutató állapottér, 3 10, 107 általánosított impulzusok, 143 147 általánosított koordináták, 143 147 áramlás, 194 197 Arisztotelész mozgástörvényei, 71 77 bázisvektorok, 30 centrifugális erő, 142 ciklikus
Mechatronika segédlet 3. gyakorlat
 Mechatronika segédlet 3. gyakorlat 2017. február 20. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Fogaskerék... 2 Nézetváltás 3D modellezéshez... 2 Könnyítés megvalósítása... 2 A fogaskerék
Mechatronika segédlet 3. gyakorlat 2017. február 20. Tartalom Vadai Gergely, Faragó Dénes Feladatleírás... 2 Fogaskerék... 2 Nézetváltás 3D modellezéshez... 2 Könnyítés megvalósítása... 2 A fogaskerék
Helyvektorok, műveletek, vektorok a koordináta-rendszerben
 Helyvektorok, műveletek, vektorok a koordináta-rendszerben. Rajzold meg az alábbi helyvektorokat a derékszögű koordináta-rendszerben, majd számítsd ki a hosszúságukat! a) (4 ) b) ( 5 ) c) ( 6 ) d) (4 )
Helyvektorok, műveletek, vektorok a koordináta-rendszerben. Rajzold meg az alábbi helyvektorokat a derékszögű koordináta-rendszerben, majd számítsd ki a hosszúságukat! a) (4 ) b) ( 5 ) c) ( 6 ) d) (4 )
RTCM alapú VITEL transzformáció felhasználó oldali beállítása Spectra Precision Survey Pro Recon szoftver használata esetén
 RTCM alapú VITEL transzformáció felhasználó oldali beállítása Spectra Precision Survey Pro Recon szoftver használata esetén A http://www.gnssnet.hu/valos_trafo.php weboldalon található, Spectra Precision
RTCM alapú VITEL transzformáció felhasználó oldali beállítása Spectra Precision Survey Pro Recon szoftver használata esetén A http://www.gnssnet.hu/valos_trafo.php weboldalon található, Spectra Precision
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag. Mátrix rangja
 VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
VIK A2 Matematika - BOSCH, Hatvan, 3. Gyakorlati anyag 2019. március 21. Mátrix rangja 1. Számítsuk ki az alábbi mátrixok rangját! (d) 1 1 2 2 4 5 1 1 1 1 1 1 1 1 2 1 2 1 1 0 1 1 2 1 0 1 1 1 1 2 3 1 3
1. Geometria a komplex számsíkon
 1. Geometria a komplex számsíkon A háromszög-egyenlőtlenség A háromszög-egyenlőtlenség (K1.4.3) Minden z,w C-re z +w z + w. Egyenlőség pontosan akkor áll, ha z és w párhuzamosak, és egyenlő állásúak, azaz
1. Geometria a komplex számsíkon A háromszög-egyenlőtlenség A háromszög-egyenlőtlenség (K1.4.3) Minden z,w C-re z +w z + w. Egyenlőség pontosan akkor áll, ha z és w párhuzamosak, és egyenlő állásúak, azaz
Skaláris szorzat: a b cos, ahol α a két vektor által bezárt szög.
 1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
Grafikus csővezeték 1 / 44
 Grafikus csővezeték 1 / 44 Grafikus csővezeték Vertex feldolgozás A vertexek egyenként a képernyő térbe vannak transzformálva Primitív feldolgozás A vertexek primitívekbe vannak szervezve Raszterizálás
Grafikus csővezeték 1 / 44 Grafikus csővezeték Vertex feldolgozás A vertexek egyenként a képernyő térbe vannak transzformálva Primitív feldolgozás A vertexek primitívekbe vannak szervezve Raszterizálás
2 PowerPoint 2016 zsebkönyv
 2 PowerPoint 2016 zsebkönyv BBS-INFO Kiadó, 2016. 4 PowerPoint 2016 zsebkönyv Bártfai Barnabás, 2016. Minden jog fenntartva! A könyv vagy annak oldalainak másolása, sokszorosítása csak a szerző írásbeli
2 PowerPoint 2016 zsebkönyv BBS-INFO Kiadó, 2016. 4 PowerPoint 2016 zsebkönyv Bártfai Barnabás, 2016. Minden jog fenntartva! A könyv vagy annak oldalainak másolása, sokszorosítása csak a szerző írásbeli
Robotika. Kinematika. Magyar Attila
 Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
Robotika Kinematika Magyar Attila amagyar@almos.vein.hu Miről lesz szó? Bevezetés Merev test pozíciója és orientációja Rotáció Euler szögek Homogén transzformációk Direkt kinematika Nyílt kinematikai lánc
 1. Bevezetés A félév anyaga. Lineáris algebra Vektorterek, alterek Függés, függetlenség, bázis, dimenzió Skaláris szorzat R n -ben, vektorok hossza és szöge Lineáris leképezések, mátrixuk, bázistranszformáció
1. Bevezetés A félév anyaga. Lineáris algebra Vektorterek, alterek Függés, függetlenség, bázis, dimenzió Skaláris szorzat R n -ben, vektorok hossza és szöge Lineáris leképezések, mátrixuk, bázistranszformáció
Akciók, diavetítés. 1. ábra Akciógombok. A lap két regiszterfülből áll, ezek a Kattintásra és az Áthaladáskor. Nézzük meg először az elsőt!
 Akciók Az akciógombok alkalmazásával beállíthatjuk, hogy az objektumra kattintva végrehajtsa a hozzárendelt hiperhivatkozást. Jól láttuk, hogy az objektumokhoz, diákhoz rendelhettünk akciókat, de az akciógombokkal
Akciók Az akciógombok alkalmazásával beállíthatjuk, hogy az objektumra kattintva végrehajtsa a hozzárendelt hiperhivatkozást. Jól láttuk, hogy az objektumokhoz, diákhoz rendelhettünk akciókat, de az akciógombokkal
GRAFIKA PROGRAMOZÁSA OPTIMALIZÁLT MEGJELENÍTÉS ALAPJAI GYAKORLATI 2D GRAFIKA II. RÉSZ. Dr. Mileff Péter
 Dr. Mileff Péter GRAFIKA PROGRAMOZÁSA GYAKORLATI 2D GRAFIKA II. RÉSZ OPTIMALIZÁLT MEGJELENÍTÉS ALAPJAI Miskolci Egyetem Általános Informatikai Tanszék 2 Általános áttekintés Általános áttekintés A vizualizáció
Dr. Mileff Péter GRAFIKA PROGRAMOZÁSA GYAKORLATI 2D GRAFIKA II. RÉSZ OPTIMALIZÁLT MEGJELENÍTÉS ALAPJAI Miskolci Egyetem Általános Informatikai Tanszék 2 Általános áttekintés Általános áttekintés A vizualizáció
Vektorterek. Wettl Ferenc február 17. Wettl Ferenc Vektorterek február / 27
 Vektorterek Wettl Ferenc 2015. február 17. Wettl Ferenc Vektorterek 2015. február 17. 1 / 27 Tartalom 1 Egyenletrendszerek 2 Algebrai struktúrák 3 Vektortér 4 Bázis, dimenzió 5 Valós mátrixok és egyenletrendszerek
Vektorterek Wettl Ferenc 2015. február 17. Wettl Ferenc Vektorterek 2015. február 17. 1 / 27 Tartalom 1 Egyenletrendszerek 2 Algebrai struktúrák 3 Vektortér 4 Bázis, dimenzió 5 Valós mátrixok és egyenletrendszerek
PlanetFight. Minden játékosnak van valamennyi űrhajója, amikkel képesek elfoglalni még fel nem fedezett, neutrális bolygókat.
 PlanetFight Készítők: A játékot készítette Róth Gergő (roth@dcs.uni-pannon.hu) és Orosz Ákos (orosz@dcs.unipannon.hu). Esetleges kérdésekkel hozzájuk lehet fordulni. Rövid leírás: A játék célja minél több
PlanetFight Készítők: A játékot készítette Róth Gergő (roth@dcs.uni-pannon.hu) és Orosz Ákos (orosz@dcs.unipannon.hu). Esetleges kérdésekkel hozzájuk lehet fordulni. Rövid leírás: A játék célja minél több
Számítógépes grafika
 Számítógépes grafika XVII. rész A grafikai modellezés A modellezés A generatív számítógépes grafikában és a képfeldolgozás során nem a valódi objektumokat (valóságbeli tárgyakat), hanem azok egy modelljét
Számítógépes grafika XVII. rész A grafikai modellezés A modellezés A generatív számítógépes grafikában és a képfeldolgozás során nem a valódi objektumokat (valóságbeli tárgyakat), hanem azok egy modelljét
Választó lekérdezés létrehozása
 Választó lekérdezés létrehozása A választó lekérdezés egy vagy több rekordforrásból származó adatokat jelenít meg. A választó lekérdezések a táblák, illetve az adatbázis tartalmát nem változtatják meg,
Választó lekérdezés létrehozása A választó lekérdezés egy vagy több rekordforrásból származó adatokat jelenít meg. A választó lekérdezések a táblák, illetve az adatbázis tartalmát nem változtatják meg,
Hajder Levente 2018/2019. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2018/2019. II. félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint egy kis ablakra
Baran Ágnes. Gyakorlat Függvények, Matlab alapok
 Matematika Mérnököknek 1. Baran Ágnes Gyakorlat Függvények, Matlab alapok Matematika Mérnököknek 1. A gyakorlatok fóliái: https://arato.inf.unideb.hu/baran.agnes/oktatas.html Feladatsorok: https://arato.inf.unideb.hu/baran.agnes/oktatas.html
Matematika Mérnököknek 1. Baran Ágnes Gyakorlat Függvények, Matlab alapok Matematika Mérnököknek 1. A gyakorlatok fóliái: https://arato.inf.unideb.hu/baran.agnes/oktatas.html Feladatsorok: https://arato.inf.unideb.hu/baran.agnes/oktatas.html
Bevezetés a programozásba II 1. gyakorlat. A grafikus könyvtár használata, alakzatok rajzolása
 Pázmány Péter Katolikus Egyetem Információs Technológiai Kar Bevezetés a programozásba II 1. gyakorlat A grafikus könyvtár használata, alakzatok rajzolása 2014.02.10. Giachetta Roberto groberto@inf.elte.hu
Pázmány Péter Katolikus Egyetem Információs Technológiai Kar Bevezetés a programozásba II 1. gyakorlat A grafikus könyvtár használata, alakzatok rajzolása 2014.02.10. Giachetta Roberto groberto@inf.elte.hu
Hajder Levente 2014/2015. tavaszi félév
 Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
Hajder Levente hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom 1 2 3 4 5 Albrecht Dürer, 1525 Motiváció Tekintsünk minden pixelre úgy, mint
PovRay. Oktatási segédlet
 PovRay Oktatási segédlet PovRay A Povray segítségével egy speciális programozási nyelven nyelven a modelltérben (3D lebegőpontos világkordinátarendszer) definiált 3D objektumokról fotorealisztikus képeket
PovRay Oktatási segédlet PovRay A Povray segítségével egy speciális programozási nyelven nyelven a modelltérben (3D lebegőpontos világkordinátarendszer) definiált 3D objektumokról fotorealisztikus képeket
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Geometria III.
 Geometria III.") Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Textúrák. Szécsi László
 Textúrák Szécsi László Textúra interpretációk kép a memóriában ugyanolyan mint a frame buffer pixel helyett texel adatok tömbje 1D, 2D, 3D tömb pl. RGB rekordok függvény diszkrét mintapontjai rácson rekonstrukció:
Textúrák Szécsi László Textúra interpretációk kép a memóriában ugyanolyan mint a frame buffer pixel helyett texel adatok tömbje 1D, 2D, 3D tömb pl. RGB rekordok függvény diszkrét mintapontjai rácson rekonstrukció:
I. Vektorok. Adott A (2; 5) és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:
 és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:") I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
Lineáris egyenletrendszerek
 Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
Bevezető. Mi is az a GeoGebra? Tények
 Bevezető Mi is az a GeoGebra? dinamikus matematikai szoftver könnyen használható csomagolásban az oktatás minden szintjén alkalmazható tanításhoz és tanuláshoz egyaránt egyesíti az interaktív geometriát,
Bevezető Mi is az a GeoGebra? dinamikus matematikai szoftver könnyen használható csomagolásban az oktatás minden szintjén alkalmazható tanításhoz és tanuláshoz egyaránt egyesíti az interaktív geometriát,
Termék modell. Definíció:
 Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Haladó lineáris algebra
 B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
B U D A P E S T I M Ű S Z A K I M A T E M A T I K A É S G A Z D A S Á G T U D O M Á N Y I I N T É Z E T E G Y E T E M Haladó lineáris algebra BMETE90MX54 Lineáris leképezések 2017-02-21 IB026 Wettl Ferenc
Mátrixok, mátrixműveletek
 Mátrixok, mátrixműveletek 1 előadás Farkas István DE ATC Gazdaságelemzési és Statisztikai Tanszék Mátrixok, mátrixműveletek p 1/1 Mátrixok definíciója Definíció Helyezzünk el n m elemet egy olyan téglalap
Mátrixok, mátrixműveletek 1 előadás Farkas István DE ATC Gazdaságelemzési és Statisztikai Tanszék Mátrixok, mátrixműveletek p 1/1 Mátrixok definíciója Definíció Helyezzünk el n m elemet egy olyan téglalap
Adatszerkezetek Tömb, sor, verem. Dr. Iványi Péter
 Adatszerkezetek Tömb, sor, verem Dr. Iványi Péter 1 Adat Adat minden, amit a számítógépünkben tárolunk és a külvilágból jön Az adatnak két fontos tulajdonsága van: Értéke Típusa 2 Adat típusa Az adatot
Adatszerkezetek Tömb, sor, verem Dr. Iványi Péter 1 Adat Adat minden, amit a számítógépünkben tárolunk és a külvilágból jön Az adatnak két fontos tulajdonsága van: Értéke Típusa 2 Adat típusa Az adatot
A MIMIO interaktív tábla használata. Dr. Boda István DRHE,
 A MIMIO interaktív tábla használata Dr. Boda István DRHE, 2017-04-21 Mimio Classroom termékcsalád Mimio Interactive oktatási technológiák (http://www.mimio.hu/) MimioTeach, MimioInteractive Xi; MimioProjector
A MIMIO interaktív tábla használata Dr. Boda István DRHE, 2017-04-21 Mimio Classroom termékcsalád Mimio Interactive oktatási technológiák (http://www.mimio.hu/) MimioTeach, MimioInteractive Xi; MimioProjector
Objektum definiálása és szerkesztése
 2. Előadás Objektum definiálása és szerkesztése A következőkben az egyes elemek definiálását, beillesztését és azok tulajdonságainak beállításait fogjuk megnézni. TÁMOP-4.1.1.C-12/1/KONV-2012-0005 projekt
2. Előadás Objektum definiálása és szerkesztése A következőkben az egyes elemek definiálását, beillesztését és azok tulajdonságainak beállításait fogjuk megnézni. TÁMOP-4.1.1.C-12/1/KONV-2012-0005 projekt
Komputeralgebra rendszerek
 Komputeralgebra rendszerek P L O T Czirbusz Sándor czirbusz@gmail.com Komputeralgebra Tanszék ELTE Informatika Kar 2009. október 12. Index I 1 Az alapok plot és plot3d Késleltetett megjelenítés Egyszerűbb
Komputeralgebra rendszerek P L O T Czirbusz Sándor czirbusz@gmail.com Komputeralgebra Tanszék ELTE Informatika Kar 2009. október 12. Index I 1 Az alapok plot és plot3d Késleltetett megjelenítés Egyszerűbb
Mesh generálás. IványiPéter
 Mesh generálás IványiPéter drview Grafikus program MDF file-ok szerkesztéséhez. A mesh generáló program bemenetét itt szerkesztjük meg. http://www.hexahedron.hu/personal/peteri/sx/index.html Pont létrehozásához
Mesh generálás IványiPéter drview Grafikus program MDF file-ok szerkesztéséhez. A mesh generáló program bemenetét itt szerkesztjük meg. http://www.hexahedron.hu/personal/peteri/sx/index.html Pont létrehozásához
5. előadás. Skaláris szorzás
 5. előadás Skaláris szorzás Bevezetés Két vektor hajlásszöge: a vektorokkal párhuzamos és egyirányú, egy pontból induló félegyenesek konvex szöge. φ Bevezetés Definíció: Két vektor skaláris szorzata abszolút
5. előadás Skaláris szorzás Bevezetés Két vektor hajlásszöge: a vektorokkal párhuzamos és egyirányú, egy pontból induló félegyenesek konvex szöge. φ Bevezetés Definíció: Két vektor skaláris szorzata abszolút
9. óra operációs rendszerek. Grafikus operációs rendszer
 9. óra operációs rendszerek Grafikus operációs rendszer Grafikus képernyőkezelés (egér) Ikonorientált rendszer Ablakos vezérlés Ablak, ikon: fájl, fájlcsoport Egységes kezelői felület Ablakkezelés Menü
9. óra operációs rendszerek Grafikus operációs rendszer Grafikus képernyőkezelés (egér) Ikonorientált rendszer Ablakos vezérlés Ablak, ikon: fájl, fájlcsoport Egységes kezelői felület Ablakkezelés Menü
LINEÁRIS ALGEBRA. matematika alapszak. Euklideszi terek. SZTE Bolyai Intézet, őszi félév. Euklideszi terek LINEÁRIS ALGEBRA 1 / 40
 LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
LINEÁRIS ALGEBRA matematika alapszak SZTE Bolyai Intézet, 2016-17. őszi félév Euklideszi terek Euklideszi terek LINEÁRIS ALGEBRA 1 / 40 Euklideszi tér Emlékeztető: A standard belső szorzás és standard
Érintőképernyős terminálok NB sorozat
 Érintőképernyős terminálok NB sorozat Témakörök HMI családok Az NB sorozat típusai, kiemelt tulajdonságai A terminálok hardver felépítése Az NB-Designer felépítése V1.23 V1.24 Az NB-Designer menürendszere
Érintőképernyős terminálok NB sorozat Témakörök HMI családok Az NB sorozat típusai, kiemelt tulajdonságai A terminálok hardver felépítése Az NB-Designer felépítése V1.23 V1.24 Az NB-Designer menürendszere
Testek. 16. Legyen z = 3 + 4i, w = 3 + i. Végezzük el az alábbi. a) (2 4), Z 5, b) (1, 0, 0, 1, 1) (1, 1, 1, 1, 0), Z 5 2.
 (2 4), Z 5, b) (1, 0, 0, 1, 1) (1, 1, 1, 1, 0), Z 5 2.") Vektorok. Melyek egyenlőek az alábbi vektorok közül? (a) (, 2, 0), (b) az (, 0, ) pontból a (2, 2, ) pontba mutató vektor, (c) ( 2,, ) ( 2,, 2), (d) [ 2 0 ], (e) 2. 0 2. Írjuk fel az x + y + 2z = 0 és
Vektorok. Melyek egyenlőek az alábbi vektorok közül? (a) (, 2, 0), (b) az (, 0, ) pontból a (2, 2, ) pontba mutató vektor, (c) ( 2,, ) ( 2,, 2), (d) [ 2 0 ], (e) 2. 0 2. Írjuk fel az x + y + 2z = 0 és
Minimum követelmények matematika tantárgyból 11. évfolyamon
 Minimum követelmények matematika tantárgyból. évfolyamon A hatványozás általánosítása pozitív alap esetén racionális kitevőre. Műveletek hatványokkal. A, a 0 függvény. Az eponenciális függvény. Vizsgálata
Minimum követelmények matematika tantárgyból. évfolyamon A hatványozás általánosítása pozitív alap esetén racionális kitevőre. Műveletek hatványokkal. A, a 0 függvény. Az eponenciális függvény. Vizsgálata
Surfer for Windows alapismeretek. A Surfer for Windows használata (8. verzió) A Surfer fontosabb jellemzői
 A Surfer fontosabb jellemzői") Surfer for Windows alapismeretek A Surfer for Windows használata (8. verzió) Kovács Balázs & Szanyi János Kovács Szanyi, 2004-2006 Hidrodinamikai és transzportmodellezés kurzus kezdőknek A Surfer fontosabb
Surfer for Windows alapismeretek A Surfer for Windows használata (8. verzió) Kovács Balázs & Szanyi János Kovács Szanyi, 2004-2006 Hidrodinamikai és transzportmodellezés kurzus kezdőknek A Surfer fontosabb
Matematika szigorlat június 17. Neptun kód:
 Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
Név Matematika szigorlat 014. június 17. Neptun kód: 1.. 3. 4. 5. Elm. Fel. Össz. Oszt. Az eredményes szigorlat feltétele elméletből legalább 0 pont, feladatokból pedig legalább 30 pont elérése. A szigorlat
DISZKRÉT MATEMATIKA: STRUKTÚRÁK Előadáson mutatott példa: Bércesné Novák Ágnes
 1. Algebrai alapok: DISZKRÉT MATEMATIKA: STRUKTÚRÁK Művelet: Egy H nemüres halmazon értelmezett (kétváltozós) műveleten egy H H H függvényt értünk, azaz egy olyan leképezést, amely bármely a,b H elempárhoz
1. Algebrai alapok: DISZKRÉT MATEMATIKA: STRUKTÚRÁK Művelet: Egy H nemüres halmazon értelmezett (kétváltozós) műveleten egy H H H függvényt értünk, azaz egy olyan leképezést, amely bármely a,b H elempárhoz
A dinamikus geometriai rendszerek használatának egy lehetséges területe
 Fejezetek a matematika tanításából A dinamikus geometriai rendszerek használatának egy lehetséges területe Készítette: Harsányi Sándor V. matematika-informatika szakos hallgató Porcsalma, 2004. december
Fejezetek a matematika tanításából A dinamikus geometriai rendszerek használatának egy lehetséges területe Készítette: Harsányi Sándor V. matematika-informatika szakos hallgató Porcsalma, 2004. december
Klár Gergely 2010/2011. tavaszi félév
 Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Virtuális világ tárolása 1 Virtuális világ tárolása 2 3 4 Virtuális világ
Számítógépes Grafika Klár Gergely tremere@elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2010/2011. tavaszi félév Tartalom Virtuális világ tárolása 1 Virtuális világ tárolása 2 3 4 Virtuális világ
Számítási módszerek a fizikában 1. (BMETE90AF35) tárgy részletes tematikája
 tárgy részletes tematikája") Számítási módszerek a fizikában 1. (BMETE90AF35) tárgy részletes tematikája Tasnádi Tamás 2014. szeptember 11. Kivonat A tárgy a BME Fizika BSc szak kötelező, alapozó tárgya a képzés 1. félévében. A tárgy
Számítási módszerek a fizikában 1. (BMETE90AF35) tárgy részletes tematikája Tasnádi Tamás 2014. szeptember 11. Kivonat A tárgy a BME Fizika BSc szak kötelező, alapozó tárgya a képzés 1. félévében. A tárgy
BME MOGI Gépészeti informatika 15.
 BME MOGI Gépészeti informatika 15. 1. feladat Készítsen alkalmazást a y=2*sin(3*x-π/4)-1 függvény ábrázolására a [-2π; 2π] intervallumban 0,1-es lépésközzel! Ezen az intervallumon a függvény értékkészlete
BME MOGI Gépészeti informatika 15. 1. feladat Készítsen alkalmazást a y=2*sin(3*x-π/4)-1 függvény ábrázolására a [-2π; 2π] intervallumban 0,1-es lépésközzel! Ezen az intervallumon a függvény értékkészlete
Láthatósági kérdések
 Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Animáció Inkscape-pel
 1 Animáció Inkscape-pel 2 Mission Inkspassible Az Inkscape nem animációs program. Ugyanakkor ideális rajzfilmfigurák készítésére, s a benne végzett transzformációk (mozgatás, forgatás, nagyítás, stb.)
1 Animáció Inkscape-pel 2 Mission Inkspassible Az Inkscape nem animációs program. Ugyanakkor ideális rajzfilmfigurák készítésére, s a benne végzett transzformációk (mozgatás, forgatás, nagyítás, stb.)
Sajátértékek és sajátvektorok. mf1n1a06- mf1n2a06 Csabai István
 Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Sajátértékek és sajátvektorok A fizika numerikus módszerei I. mf1n1a06- mf1n2a06 Csabai István Lineáris transzformáció Vektorok lineáris transzformációja: általános esetben az x vektor iránya és nagysága
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
1. Transzformációk mátrixa
 1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
1 Transzformáiók mátrixa Lineáris transzformáiók Definíió T test Az A : T n T n függvény lineáris transzformáió, ha tetszőleges v,w T n vektorra és λ skalárra teljesül, hogy A(v + w) A(v) + A(w) és A(λv)
Négycsuklós mechanizmus modelljének. Adams. elkészítése, kinematikai vizsgálata,
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Négycsuklós mechanizmus modellezése SZIE-K2 alap közepes - haladó Adams
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Négycsuklós mechanizmus modellezése SZIE-K2 alap közepes - haladó Adams
Matematika szigorlat, Mérnök informatikus szak I máj. 29.
 Matematika szigorlat, Mérnök informatikus szak I. 2007. máj. 29. Megoldókulcs 1. Adott az S : 3x 6y + 2z = 6 sík a három dimenziós térben. (a) Írja fel egy tetszőleges, az S-re merőleges S síknak az egyenletét!
Matematika szigorlat, Mérnök informatikus szak I. 2007. máj. 29. Megoldókulcs 1. Adott az S : 3x 6y + 2z = 6 sík a három dimenziós térben. (a) Írja fel egy tetszőleges, az S-re merőleges S síknak az egyenletét!