SVM (közepesen mély bevezetés)
|
|
|
- Gusztáv Vincze
- 10 évvel ezelőtt
- Látták:
Átírás
1 SVM (közepesen mély bevezetés) Adatbányászat és Keresés Csoport, MTA SZTAKI dms.sztaki.hu Szabó Adrienn április 4.

2 Bevezetés Alapötlet Jelölések Maximum margin classier Optimalizálási feladat Tartalom Szupport vektor gépek Lagrange duális Lineáris SVM levezetés Soft maximum margin classier Nemlineáris SVM: a kernel trükk Gyakorlatiasabb oldal Kernelválasztás Paraméterválasztás Implementációk

3 SVM Az SVM (Suport Vector Machine) Vladimir N. Vapnik és Corinna Cortes többféle gépi tanulási feladatra alkalmazható modellje (1995). Alapváltozata lineáris kétosztályos szeparálásra képes, de kiterjeszthet egy- vagy többosztályos szeparálásra nemlineáris szeparálásra és nemlineáris regressziós feladatokra is.[1]

4 Motiváció Mit tud az SVM (amit mások nem ennyire)? jó általánosító képesség gyorsaság nagy dimenziós adatok kezelése akkor is (egészen) használható ha több a dimenzió mint az adatpont
")
5 SVM Alapötlet képekben Lineárisan nem szeparálható feladat, de jól magasabb dimenzióba küldjük, és ott igen

6 Szeparáló sík 3D-ben
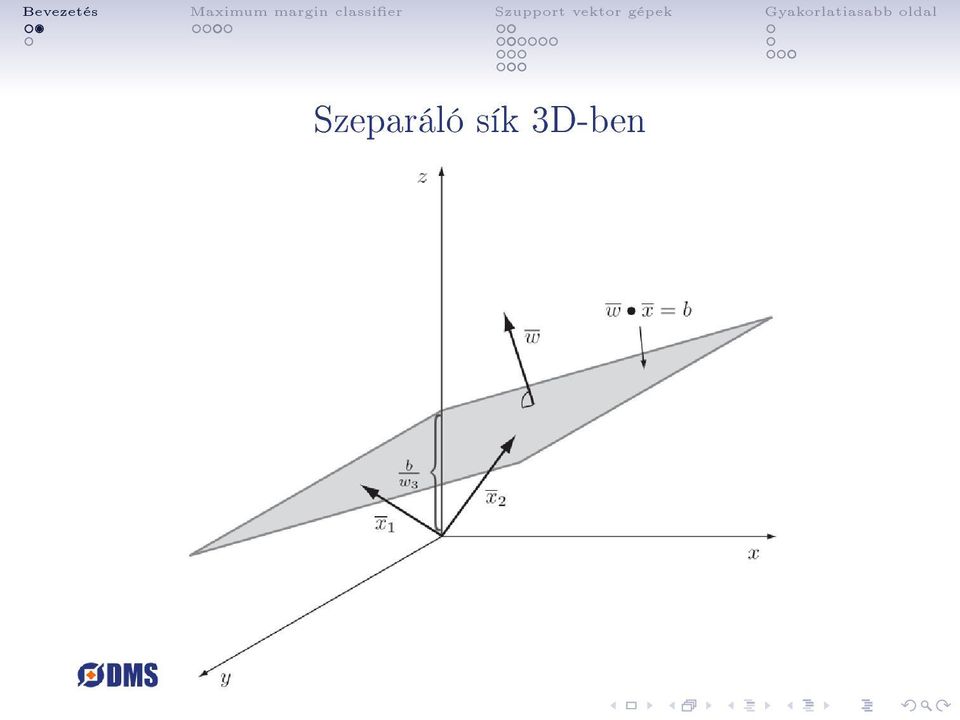
7 Jelölések Egy tanítópont: ( x, y) ahol x R n, y {+1, 1} Az x pontok dimenziója: A tanítópontok darabszáma: A tanítóhalmaz: n l D = {( x i, y i ) x i R n, y i {+1, 1}} A szeparáló sík normálvektora: ω Nem egységhosszú! A szeparáló sík eltolása: Az f függvényt keressük amivel címkéket gyárthatunk az új x pontokhoz (amik nem voltak D-ben): b f : R n {+1, 1}

8 Maximális szeparálás A szeparáló sík minél messzebb legyen mindkét osztály pontjaitól, és pontosan középen a két osztály ponjtjai között. 1. ábra. A szürkék is megoldják a szeparálást, de a fekete jobb

9 Optimalizálási feladat általában Keressük a célfüggvényünk, φ : R n R széls értékét: min φ( x) x miközben a megengedett megoldások: g i ( x) 0 ahol g i : R n R lineáris függvények, 0-ra rendezve. Az optimális megoldás az az x lesz amire igaz bármely x esetén hogy φ( x ) φ( x). Ha φ is lineáris, akkor lineáris optimalizálási feladatunk van LP feladat. Ha φ kvadratikus (négyzetes, plusz esetleg lineáris tag is) QP feladat. Ha φ konvex akkor konvex optimalizálási feladat.

10 Az optimalizálási feladatunk A margót (margin) kell maximalizálni, ami a szupport-síkok távolsága.

11 Optimalizáljuk a szeparáló síkot I A φ( ω, b) célfüggvényünket kellene úgy meghatározni, hogy a maximális margót megkaphassuk az optimalizálással. A korlátokat az fogja jelenteni, hogy a szupport-síkok nem mehetnek túl a tanítópontokon ( ω x + b + k ill. ω x b k). Tegyük fel hogy az optimális margó mérete m, és az optimális szeparáló síkunk egyenlete: Ekkor így írhatjuk fel a margót: ω x = b (1) m = φ( ω, b ) = max φ( ω, b) (2) De mi legyen a φ függvényünk?
.")
12 Optimalizáljuk a szeparáló síkot II
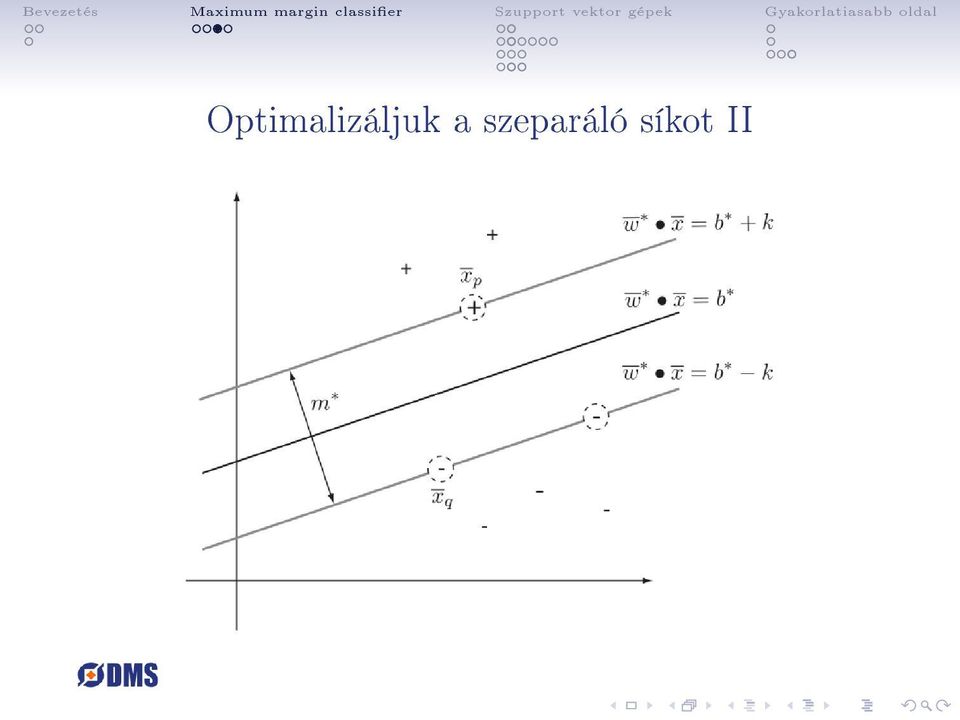
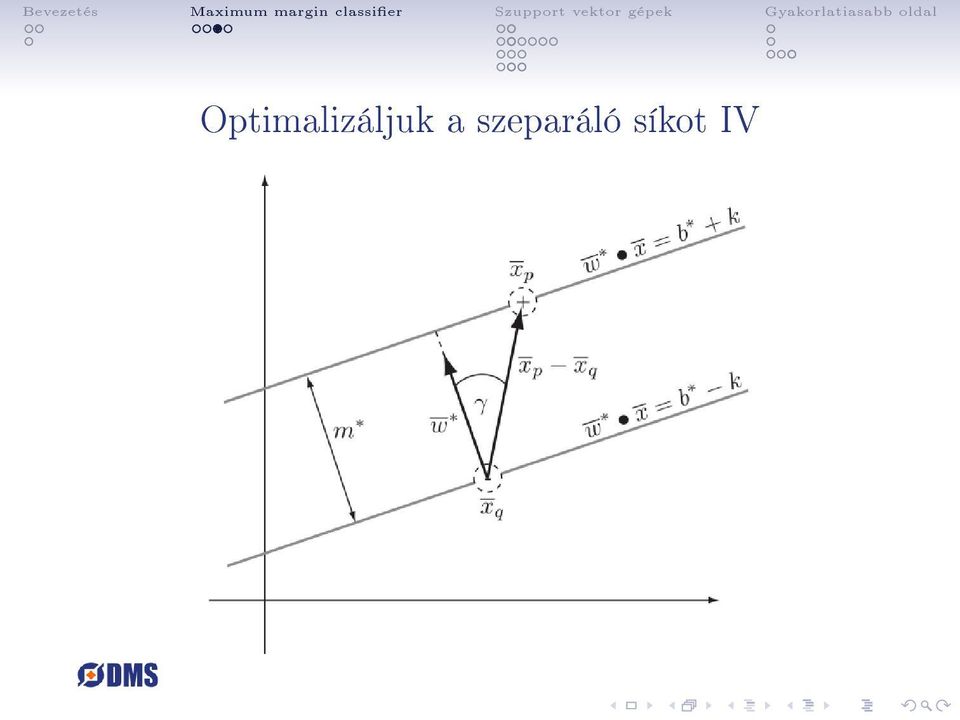
13 Optimalizáljuk a szeparáló síkot III A szupport-síkokra ezeket írhatjuk fel: ω x = b + k (3) ω x = b k (4) Legyen ( x p, +1) D és ( x q, 1) D egy-egy szupport vektor. Ekkor a különbségüket ω irányába vetítve m -ot kell kapnunk (ábra). m = x p x q cos γ = ω ( x p x q ) ω = (b + k) (b k) ω = 2k ω = ω x p ω x q ω
.")
14 Optimalizáljuk a szeparáló síkot IV
15 Optimalizáljuk a szeparáló síkot V m = max 2k ω De inkább minimalizálnánk, ezért átírjuk: (5) m = max 2k ω ω 2 = min = min ω 2k 2k = min 1 ω ω 2k = min 1 ω ω 2 Az utolsó lépésben k = 1 -et választhatunk, mert a skálázásra invariáns az optimalizálásunk. Tehát a célfüggvényünk: φ( ω, b ) = 1 ω ω (6) 2

16 Optimalizáljuk a szeparáló síkot VI A korlátok így alakulnak: ω x i 1 + b minden ( x i, y i ) D -re, ahol y i = +1 ω ( x i ) 1 b minden ( x i, y i ) D -re, ahol y i = 1 Ami rövidebben így is írható: ω (y i x i ) 1 y i b minden ( x i, y i ) D -re (7) Így megvan a kvadratikus optimalizálási feladatunk.
 D -re (7) Így megvan a kvadratikus optimalizálási")
17 Kvadratikus programozás (QP) A kvadratikus optimalizálási feladatok (QP, Quadratic programming) megoldására vannak ismert módszerek. Erre most nincs id részletesen, a lényeg hogy viszonylag egyszer en QP feladattá alakítható a fenti. Ennek a megoldásnak az a hátránya, hogy elég számításigényes ha sok tanítópontunk van (mindegyik megjelenik korlátként). Segít a helyzeten, ha a feladat duálisát nézzük. És ezt a duális felírást nevezzünk majd SVM-nek.

18 Lagrange duális Optimalizálási feladatoknál viszonylag gyakori, hogy egy feladat átfogalmazásával, a duális néz pontból szebben (vagy csak máshogy) megoldható feladatot kapunk. A Lagrange duális lényege egy mondatban: Ha M darab korlátunk van, és f-nek keressük széls értékét (minden folytonos és deriválható, és a célfüggvény konvex) akkor az eredeti helyett a következ nek a megoldásával is megtaláljuk a megoldást: f( x) + M λ k g k ( x) = 0 k=1 ahol a gradiens vektort jelöli, és a λ k -k a Lagrange együtthatók, amik pozitívak.[1]
 akkor az eredeti helyett a következ nek a megoldásával is megtaláljuk a megoldást: f( x) + M λ k g k ( x) =")
19 (*) Lagrange duális részletesebben I Ha keressük egy konvex függvény széls értékét, min x φ( x)-et g i ( x) 0, (i = 1... l) korlátokkal (primál feladat), akkor ebb l a következ Lagrange optimalizálási feladatot írhatjuk, amely egy képletbe fogja össze a korlátokat és a célfüggvényt: max min L( α, x) = max α,α i 0 x min α,α i 0 x ( φ( x) ) l α i g i ( x) Itt x a primál változó, α pedig a duál változó. A két, ellentétesirányú széls érték miatt ez szemléletesen azt jelenti hogy L( x, α) nyeregpontját keressük. Ha φ( x) konvex, akkor pontosan egy ilyen nyeregpont van. i=1 (8)
 nyeregpontját keressük.")
20 (*) Lagrange duális részletesebben II Bizonyítható, hogy az ( x, α ) megoldás akkor és csak akkor lesz az eredeti feladatunknak is széls értéke, ha teljesülnek a KKT (KarushKuhnTucker) feltételek: L x ( α, x ) = 0 (9) αi g i ( x ) = 0 (10) g i ( x ) 0 (11) αi 0 (12)
 = 0 (9) αi g i ( x ) = 0 (10) g i ( x ) 0 (11) αi 0")
21 SVM: a max margin klasszikátor duálisa SVM: A maximális margó keresése Lagrange duálissal. Ennek az lesz az el nye hogy így szebben megoldható a feladat, illetve lehet vé válik majd a kernel trükk. Tegyük fel hogy van egy lineárisan szeparálható tanítóhalmazunk: D = {( x 1, y 1 ), ( x 2, y 2 ),... ( x l, y l )} R n {+1, 1} és a következ az optimalizálandó célfüggvényünk: 1 min φ( ω, b) = min ω ω (13) ω,b ω,b 2 a következ korlátokkal: g i ( ω, b) = y i ( ω x i b) 1 0 (i = 1... l) (14) (Ez eddig ugyanaz ami már volt a maximum margin klasszikátornál.)
22 (*) SVM levezetés I El ször így fog kinézni a Lagrange duálisunk, keressük a nyeregpontot: max min L( α, ω, b) (15) α,α i 0 ω,b ahol l L( α, ω, b) = φ( ω, b) α i g i ( ω, b) (16) i=1 = 1 l 2 ω ω α i (y i ( ω x i b) 1) (17) i=1 = 1 l 2 ω ω α i y i ω x i + b l l α i y i + α i (18) i=1 i=1 i=1
23 (*) SVM levezetés II Most tegyük fel, hogy ω, α és b az optimális megoldást adják. Ekkor a KKT feltételek: És ha minden igaz, akkor: L ω ( α, ω, b ) = 0 (19) L b ( α, ω, b ) = 0 (20) αi (y i ( ω x i b ) 1) = 0 (21) y i ( ω x i b ) 1 0 (22) αi 0 (23) max min L( α, ω, b) = α ω,b L( α, ω, b ) = φ( ω, b ) (24)
24 (*) SVM levezetés III Most jön az a trükk, hogy ω és b kiesnek majd, és csak az α marad majd, amire optimalizálni kell. Mivel a ω, b megoldás optimális, ezért L nyeregpontjának kell lennie. Az els KKT-t (19) használva L-t ω szerint deriváljuk (18)-t és ω -nál 0-vá tesszük: Ebb l következik: L ω ( α, ω, b) = ω ω = l α i y i x i = 0 (25) i=1 l α i y i x i (26) i=1
25 (*) SVM levezetés IV Most (18)-t b szerint deriváljuk, a második KKT-t (20)-t használva b -nál ez is 0 kell legyen: L b ( α, ω, b ) = l α i y i = 0 (27) Itt kiesett a b, de nem baj, ki tudjuk majd számolni ezt is az α i -kb l (kicsit kés bb). Végül (18)-be behelyettesítgetve ill. kiejtve ami nulla lett: L d ( α) = L( α, ω, b ) = i=1 l α i 1 2 i=1 l i=1 j=1 Ebbe a képletbe már belefér majd a kernel trükk... :) l α i α j y i y j x i x j (28)
26 A lineáris SVM formálisan A maximális margó megtalálásának duális alakja: l max L d( α) = max α i 1 l l α i α j y i y j x i x j (29) α α 2 i=1 A következ korlátokkal (i = 1... l): i=1 j=1 l α i y i = 0 (30) i=1 α i 0 (31)
27 A szupport vektorok Az egyik KKT feltétel (21) szerint: α i (y i ( ω x i b ) 1) = 0 Ebb l vagy az következik hogy αi = 0, vagy az hogy y i ( ω x i b ) 1 = 0. Tegyük fel hogy αj > 0 egy ( x j, y j ) D tanítópontra. Ekkor a feltétel szerint y i ( ω x i b ) = 1 : ω x j = b + 1 ha y j = +1 ω x j b 1 ha y j = 1 Vagyis ezek a tanítópontok pont rajta vannak az egyik szupport-síkon. (Ami meg nincs szupport síkon, annak az α értéke, vagyis Lagrange-együtthatója 0, mert ezek nem befolyásolják a margó méretét.)
28 (*) Az eltolás Még nem mondtuk meg hogy a b -ot hogy számoljuk ki. Szerencsére csak a szupport vektorok számítanak. Válasszunk egyet, például a +1-es osztályból ( x sv +, +1)-t. Ekkor: b = ω x sv + 1 = l αi y i x i x sv + 1 (32) i=1
29 A döntési függvényünk A primál feladat az optimális szupport-síkokat határozta meg, amiket a szupport vektorok korlátoznak. A duális megoldásban pedig a szupport vektorokat kaptuk meg, amik a síkokat korlátozzák. De arra szeretnénk majd használni a klasszikátorunkat hogy mondja meg egy pontról hogy a szeparáló sík melyik oldalára esik. Így a lineáris SVM döntési függvénye: f( x) = sgn ( ω x b ) (33) ( l ) l = sgn αi y i x i x αi y i x i x sv (34) i=1 i=1
30 Soft maximum margin classier Eddig megköveteltük hogy a tanítópontok lineárisan szeparálhatóak legyenek. Ami sajnos nem mindig teljesíthet, gyakaran zajos az adat...
31 Soft maximum margin classier Kicsit lazítunk a feltételeken, bevezetjük a slack változókat, amikkel egy-egy tanítópont félreklasszikálhatóságát adjuk meg. Az össz-félreklasszikálhatóság-nak meg megadhatunk egy C súlyt (büntetést). Így az új korlátaink: y i( ω x i b) 1 ξ i ahol i = 1...l és ξ i 0 (35) A célfüggvény pedig igyekszik ezeket a slack változókat is minimalizálni a margó maximalizálása mellett: { } 1 l 2 ω 2 + C ξ i min ω, ξ,b i=1 (36)
32 Soft maximum margin classier duálisa Itt az a nagyszer ség áll fenn, hogy ha kiszámoljuk, a ξ i -k jól kiesnek a célfüggvényünkb l, és csak egy C fels korlát marad bel lük a Lagrange együtthatókhoz: max α L d( α) = max α l α i 1 2 i=1 A korlátok pedig (i = 1... l): l i=1 j=1 l α i α j y i y j x i x j (37) l α i y i = 0 (38) i=1 0 α i C (39)
33 Nemlineáris SVM: a kernel trükk Az eredeti pontokat magasabb dimenzióba transzformáljuk, remélve hogy ott már lineárisan szeparálhatóak az osztályok
34 A kernel trükk I Eddig (a primál megfogalmazásban) volt egy ilyen képletünk, ω és x közötti skaláris szorzattal: f( x) = sgn ( ω x b ) (40) És most szeretnénk a szeparálást egy magasabb dimenzióban eljátszani, vagyis az x-ek helyett ϕ( x)-et szeretnénk írni. f( x) = sgn ( ω ϕ( x) b ) (41)
35 A kernel trükk II A kernel-trükk lényege az, hogy ha van egy megfelel kernelünk: K( x, y) = (ϕ( x), ϕ( y)) (42) akkor igaziból nem is kell majd a ϕ-ket számolgatni, meg magasabb dimenzióba menni, mert a K( x, y) anélkül is számolható, és az SVM duális alakjában ez pont elég is.
36 A kernel trükk III A primál döntési függvényünkbe a ω duális reprezentációját ( ω = l i=1 α i y iϕ( x i )) helyettesítve: f( x) = sgn ( ω ϕ( x) b ) (43) ( l ) = sgn αi y i ϕ( x i ) ϕ( x) b (44) i=1 ( l ) = sgn αi y i K( x i, x) b i=1 Ha okosan választunk ϕ függvényt, akkor a döntési függvényünk ugyanolyan egyszer lesz mint a lineáris esetben; csak annyi lesz a különbség, hogy a skaláris szorzat helyett a kernelt kell írni. (45)
37 Kernel függvények I De egy K : R n R n R( x, y) függvény mikor olyan, hogy jó lesz kernelnek, vagyis mikor létezik hozzá ϕ úgy hogy K( x, y) = (ϕ( x), ϕ( y))? Bizonyítható, hogy akkor, ha pozitív denit: l i=1 j=1 l θ i θ j K( x i, x j ) 0 (46) A kernel-függvény tulajdonképpen a két vektor hasonlóságát méri.[6]
38 Kernel függvények II Kernel functions must be continuous, symmetric, and most preferably should have a positive (semi-) denite Gram matrix. Kernels which are said to satisfy the Mercer's theorem are positive semi-denite, meaning their kernel matrices have no non-negative Eigen values. The use of a positive denite kernel insures that the optimization problem will be convex and solution will be unique. However, many kernel functions which aren't strictly positive denite also have been shown to perform very well in practice (sigmoid kernel).[5]
39 Néhány kernel függvény Hogy melyiket érdemes választani az mindig az adott feladattól/adathalmaztól függ. (Ha nincs jobb ötletünk, kezdjük a Gauss-kernellel.) Polinomiális (homogén) K( x i, x j ) = ( x i x j ) d Polinomiális (inhomogén) K( x i, x j ) = ( x i x j + 1) d Gauss (RBF) K( x i, x j ) = exp( γ x i x j 2 ), ahol γ > 0, néha úgy paraméterezve hogy γ = 1/2σ 2 Hiperbolikus tangens K( x i, x j ) = tanh(κ x i x j + c) d, ahol κ > 0 és c < 0, plusz egyéb feltételek.
40 Paraméterválasztás Az SVM teljesítménye függ a választott kernelt l, a C puhasági paramétert l, és az adott kernel-függvény paraméterekt l is. Például Gauss-kernel esetén a γ paraméter és a C legjobb kombinációját egy grid-kereséssel szokás meghatározni, exponenciálisan növ értékekkel, pl: C {2 5, 2 3,..., 2 13, 2 15 } γ {2 15, 2 13,..., 2 1, 2 3 } Minden paraméter-párt CV-val kiértékelünk, és a legjobbat kiválasztjuk. Aztán a teljes tanítóhalmazt és a választott paramétereket használva építjük fel a klasszikáló modellünket.
41 Implementációk LIBLINEAR LIBLINEAR is a linear classier for data with millions of instances and features LIBSVM LIBSVM is an integrated software for support vector classication, regression and distribution estimation SVMlight SVMlight is an implementation of Vapnik's Support Vector Machine for the problem of pattern recognition, for regression, and for learning a ranking function. WEKA Ez azért kényelmes mert sok más klasszikátor is van benne; amúgy a LIBSVM-et wrappeli.
42 Special Thanks Különleges köszönet Fekete Zsoltnak és Pálovics Robinak
43 Hivatkozások I Wikipedia, Support vector machine, :35 Wikipedia, Optimization problem, :51 Wikipedia, Mathematical optimization, :03 Lutz Hamel, Knowledge discovery with support vector machines, John Wiley & Sons, Inc., Hoboken, New Jersey, 2009 César Roberto de Souza, Science, computing and machine learning. Blog, http: //crsouza.blogspot.hu/2010/03/kernel-functions-for-machine-learning.html, :47
44 Hivatkozások II Altrichter Márta, Horváth Gábor, Pataki Béla, Strausz György, Takács Gábor, Valyon József, Mesterséges Intelligencia Elektronikus Almanach, 6. fejezet - Kernel módszerek, :32
Gépi tanulás a gyakorlatban SVM
 Gépi tanulás a gyakorlatban SVM Klasszifikáció Feladat: előre meghatározott csoportok elkülönítése egymástól Osztályokat elkülönítő felület Osztályokhoz rendelt döntési függvények Klasszifikáció Feladat:
Gépi tanulás a gyakorlatban SVM Klasszifikáció Feladat: előre meghatározott csoportok elkülönítése egymástól Osztályokat elkülönítő felület Osztályokhoz rendelt döntési függvények Klasszifikáció Feladat:
Totális Unimodularitás és LP dualitás. Tapolcai János
 Totális Unimodularitás és LP dualitás Tapolcai János tapolcai@tmit.bme.hu 1 Optimalizálási feladat kezelése NP-nehéz Hatékony megoldás vélhetően nem létezik Jó esetben hatékony algoritmussal közelíteni
Totális Unimodularitás és LP dualitás Tapolcai János tapolcai@tmit.bme.hu 1 Optimalizálási feladat kezelése NP-nehéz Hatékony megoldás vélhetően nem létezik Jó esetben hatékony algoritmussal közelíteni
Support Vector Machines
 Support Vector Machnes Ormánd Róbert MA-SZE Mest. Int. Kutatócsoport 2009. február 17. Előadás vázlata Rövd bevezetés a gép tanulásba Bevezetés az SVM tanuló módszerbe Alapötlet Nem szeparálható eset Kernel
Support Vector Machnes Ormánd Róbert MA-SZE Mest. Int. Kutatócsoport 2009. február 17. Előadás vázlata Rövd bevezetés a gép tanulásba Bevezetés az SVM tanuló módszerbe Alapötlet Nem szeparálható eset Kernel
Nem-lineáris programozási feladatok
 Nem-lineáris programozási feladatok S - lehetséges halmaz 2008.02.04 Dr.Bajalinov Erik, NyF MII 1 Elég egyszerű példa: nemlineáris célfüggvény + lineáris feltételek Lehetséges halmaz x 1 *x 2 =6.75 Gradiens
Nem-lineáris programozási feladatok S - lehetséges halmaz 2008.02.04 Dr.Bajalinov Erik, NyF MII 1 Elég egyszerű példa: nemlineáris célfüggvény + lineáris feltételek Lehetséges halmaz x 1 *x 2 =6.75 Gradiens
11. Előadás. 11. előadás Bevezetés a lineáris programozásba
 11. Előadás Gondolkodnivalók Sajátérték, Kvadratikus alak 1. Gondolkodnivaló Adjuk meg, hogy az alábbi A mátrixnak mely α értékekre lesz sajátértéke a 5. Ezen α-ák esetén határozzuk meg a 5 sajátértékhez
11. Előadás Gondolkodnivalók Sajátérték, Kvadratikus alak 1. Gondolkodnivaló Adjuk meg, hogy az alábbi A mátrixnak mely α értékekre lesz sajátértéke a 5. Ezen α-ák esetén határozzuk meg a 5 sajátértékhez
Opkut deníciók és tételek
 Opkut deníciók és tételek Készítette: Bán József Deníciók 1. Deníció (Lineáris programozási feladat). Keressük meg adott lineáris, R n értelmezési tartományú függvény, az ún. célfüggvény széls értékét
Opkut deníciók és tételek Készítette: Bán József Deníciók 1. Deníció (Lineáris programozási feladat). Keressük meg adott lineáris, R n értelmezési tartományú függvény, az ún. célfüggvény széls értékét
Kernel gépek vizsgálata
 Kernel gépek vizsgálata Lágler Krisztián 2011. május 12. FYMGQ8 Konzulens : Dr. Horváth Gábor 1 Tartalomjegyzék 1. Feladat kiírás 3 1.1. A kernelfüggvény hiperparamétereinek megválasztása..... 3 2. Bevezetés
Kernel gépek vizsgálata Lágler Krisztián 2011. május 12. FYMGQ8 Konzulens : Dr. Horváth Gábor 1 Tartalomjegyzék 1. Feladat kiírás 3 1.1. A kernelfüggvény hiperparamétereinek megválasztása..... 3 2. Bevezetés
Csima Judit április 9.
 Osztályozókról még pár dolog Csima Judit BME, VIK, Számítástudományi és Információelméleti Tanszék 2018. április 9. Csima Judit Osztályozókról még pár dolog 1 / 19 SVM (support vector machine) ez is egy
Osztályozókról még pár dolog Csima Judit BME, VIK, Számítástudományi és Információelméleti Tanszék 2018. április 9. Csima Judit Osztályozókról még pár dolog 1 / 19 SVM (support vector machine) ez is egy
Optimalizálás alapfeladata Legmeredekebb lejtő Lagrange függvény Log-barrier módszer Büntetőfüggvény módszer 2017/
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
A Markowitz modell: kvadratikus programozás
 A Markowitz modell: kvadratikus programozás Harry Markowitz 1990-ben kapott Közgazdasági Nobel díjat a portfolió optimalizálási modelljéért. Ld. http://en.wikipedia.org/wiki/harry_markowitz Ennek a legegyszer
A Markowitz modell: kvadratikus programozás Harry Markowitz 1990-ben kapott Közgazdasági Nobel díjat a portfolió optimalizálási modelljéért. Ld. http://en.wikipedia.org/wiki/harry_markowitz Ennek a legegyszer
Ütemezési modellek. Az ütemezési problémák osztályozása
 Ütemezési modellek Az ütemezési problémák osztályozása Az ütemezési problémákban adott m darab gép és n számú munka, amelyeket az 1,..., n számokkal fogunk sorszámozni. A feladat az, hogy ütemezzük az
Ütemezési modellek Az ütemezési problémák osztályozása Az ütemezési problémákban adott m darab gép és n számú munka, amelyeket az 1,..., n számokkal fogunk sorszámozni. A feladat az, hogy ütemezzük az
Gépi tanulás a gyakorlatban. Lineáris regresszió
 Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
15. LINEÁRIS EGYENLETRENDSZEREK
 15 LINEÁRIS EGYENLETRENDSZEREK 151 Lineáris egyenletrendszer, Gauss elimináció 1 Definíció Lineáris egyenletrendszernek nevezzük az (1) a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
15 LINEÁRIS EGYENLETRENDSZEREK 151 Lineáris egyenletrendszer, Gauss elimináció 1 Definíció Lineáris egyenletrendszernek nevezzük az (1) a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
rank(a) == rank([a b])
![rank(a) == rank([a b])](/thumbs/92/110554624.jpg "rank(a) == rank([a b])") Lineáris algebrai egyenletrendszerek megoldása a Matlabban Lineáris algebrai egyenletrendszerek a Matlabban igen egyszer en oldhatók meg. Legyen A az egyenletrendszer m-szer n-es együtthatómátrixa, és
Lineáris algebrai egyenletrendszerek megoldása a Matlabban Lineáris algebrai egyenletrendszerek a Matlabban igen egyszer en oldhatók meg. Legyen A az egyenletrendszer m-szer n-es együtthatómátrixa, és
Kernel módszerek. 7. fejezet
 7. fejezet Kernel módszerek Ebben a fejezetben olyan tanuló rendszerekkel foglalkozunk, amelyek a válaszokat ún. kernel függvények (vagy magfüggvények) súlyozott összegeként állítják elő. A megközelítés
7. fejezet Kernel módszerek Ebben a fejezetben olyan tanuló rendszerekkel foglalkozunk, amelyek a válaszokat ún. kernel függvények (vagy magfüggvények) súlyozott összegeként állítják elő. A megközelítés
Lineáris regressziós modellek 1
 Lineáris regressziós modellek 1 Ispány Márton és Jeszenszky Péter 2016. szeptember 19. 1 Az ábrák C.M. Bishop: Pattern Recognition and Machine Learning c. könyvéből származnak. Tartalom Bevezető példák
Lineáris regressziós modellek 1 Ispány Márton és Jeszenszky Péter 2016. szeptember 19. 1 Az ábrák C.M. Bishop: Pattern Recognition and Machine Learning c. könyvéből származnak. Tartalom Bevezető példák
Taylor-polinomok. 1. Alapfeladatok. 2015. április 11. 1. Feladat: Írjuk fel az f(x) = e 2x függvény másodfokú Maclaurinpolinomját!
 = e 2x függvény másodfokú Maclaurinpolinomját!") Taylor-polinomok 205. április.. Alapfeladatok. Feladat: Írjuk fel az fx) = e 2x függvény másodfokú Maclaurinpolinomját! Megoldás: A feladatot kétféle úton is megoldjuk. Az els megoldásban induljunk el
Taylor-polinomok 205. április.. Alapfeladatok. Feladat: Írjuk fel az fx) = e 2x függvény másodfokú Maclaurinpolinomját! Megoldás: A feladatot kétféle úton is megoldjuk. Az els megoldásban induljunk el
A lineáris programozás alapfeladata Standard alak Az LP feladat megoldása Az LP megoldása: a szimplex algoritmus 2017/
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatika Intézet Számítógépes Optimalizálás Tanszék 2. Előadás LP alapfeladat A lineáris programozás (LP) alapfeladata standard formában Max c
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatika Intézet Számítógépes Optimalizálás Tanszék 2. Előadás LP alapfeladat A lineáris programozás (LP) alapfeladata standard formában Max c
Regresszió. Csorba János. Nagyméretű adathalmazok kezelése március 31.
 Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
A lineáris programozás alapfeladata Standard alak Az LP feladat megoldása Az LP megoldása: a szimplex algoritmus 2018/
 Operációkutatás I. 2018/2019-2. Szegedi Tudományegyetem Informatika Intézet Számítógépes Optimalizálás Tanszék 2. Előadás LP alapfeladat A lineáris programozás (LP) alapfeladata standard formában Max c
Operációkutatás I. 2018/2019-2. Szegedi Tudományegyetem Informatika Intézet Számítógépes Optimalizálás Tanszék 2. Előadás LP alapfeladat A lineáris programozás (LP) alapfeladata standard formában Max c
Megoldott feladatok november 30. n+3 szigorúan monoton csökken, 5. n+3. lim a n = lim. n+3 = 2n+3 n+4 2n+1
 Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Megoldott feladatok 00. november 0.. Feladat: Vizsgáljuk az a n = n+ n+ sorozat monotonitását, korlátosságát és konvergenciáját. Konvergencia esetén számítsuk ki a határértéket! : a n = n+ n+ = n+ n+ =
Konjugált gradiens módszer
 Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Közelítő és szimbolikus számítások 12. gyakorlat Konjugált gradiens módszer Készítette: Gelle Kitti Csendes Tibor Vinkó Tamás Faragó István Horváth Róbert jegyzetei alapján 1 LINEÁRIS EGYENLETRENDSZEREK
Nemkonvex kvadratikus egyenlőtlenségrendszerek pontos dualitással
 pontos dualitással Imre McMaster University Advanced Optimization Lab ELTE TTK Operációkutatási Tanszék Folytonos optimalizálás szeminárium 2004. július 6. 1 2 3 Kvadratikus egyenlőtlenségrendszerek Primál
pontos dualitással Imre McMaster University Advanced Optimization Lab ELTE TTK Operációkutatási Tanszék Folytonos optimalizálás szeminárium 2004. július 6. 1 2 3 Kvadratikus egyenlőtlenségrendszerek Primál
Dualitás Dualitási tételek Általános LP feladat Komplementáris lazaság 2017/ Szegedi Tudományegyetem Informatikai Intézet
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 7. Előadás Árazási interpretáció Tekintsük újra az erőforrás allokációs problémát (vonat
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 7. Előadás Árazási interpretáció Tekintsük újra az erőforrás allokációs problémát (vonat
Gauss-Jordan módszer Legkisebb négyzetek módszere, egyenes LNM, polinom LNM, függvény. Lineáris algebra numerikus módszerei
 A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
A Gauss-Jordan elimináció, mátrixinvertálás Gauss-Jordan módszer Ugyanazzal a technikával, mint ahogy a k-adik oszlopban az a kk alatti elemeket kinulláztuk, a fölötte lévő elemeket is zérussá lehet tenni.
Optimumkeresés számítógépen
 C Optimumkeresés számítógépen Az optimumok megtalálása mind a gazdasági életben, mind az élet sok más területén nagy jelentőségű. A matematikában számos módszert dolgoztak ki erre a célra, például a függvények
C Optimumkeresés számítógépen Az optimumok megtalálása mind a gazdasági életben, mind az élet sok más területén nagy jelentőségű. A matematikában számos módszert dolgoztak ki erre a célra, például a függvények
Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs rendszerek Tanszék. Neurális hálók. Pataki Béla
 Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs rendszerek Tanszék Neurális hálók Előadó: Előadás anyaga: Hullám Gábor Pataki Béla Dobrowiecki Tadeusz BME I.E. 414, 463-26-79
Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs rendszerek Tanszék Neurális hálók Előadó: Előadás anyaga: Hullám Gábor Pataki Béla Dobrowiecki Tadeusz BME I.E. 414, 463-26-79
Lineáris algebra gyakorlat
 Lineáris algebra gyakorlat 7. gyakorlat Gyakorlatvezet : Bogya Norbert 2012. március 26. Ismétlés Tartalom 1 Ismétlés 2 Koordinátasor 3 Bázistranszformáció és alkalmazásai Vektorrendszer rangja Mátrix
Lineáris algebra gyakorlat 7. gyakorlat Gyakorlatvezet : Bogya Norbert 2012. március 26. Ismétlés Tartalom 1 Ismétlés 2 Koordinátasor 3 Bázistranszformáció és alkalmazásai Vektorrendszer rangja Mátrix
Vektorgeometria (2) First Prev Next Last Go Back Full Screen Close Quit
 First Prev Next Last Go Back Full Screen Close Quit") Vektorgeometria (2) First Prev Next Last Go Back Full Screen Close Quit 1. Tekintsünk a térben egy P (p 1, p 2, p 3 ) pontot és egy v = (v 1, v 2, v 3 ) = 0 vektort. Ekkor pontosan egy egyenes létezik,
Vektorgeometria (2) First Prev Next Last Go Back Full Screen Close Quit 1. Tekintsünk a térben egy P (p 1, p 2, p 3 ) pontot és egy v = (v 1, v 2, v 3 ) = 0 vektort. Ekkor pontosan egy egyenes létezik,
Nemlineáris programozás 2.
 Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
Szélsőérték-számítás
 Szélsőérték-számítás Jelölések A következő jelölések mind az f függvény x szerinti parciális deriváltját jelentik: Ugyanígy az f függvény y szerinti parciális deriváltja: f x = xf = f x f y = yf = f y
Szélsőérték-számítás Jelölések A következő jelölések mind az f függvény x szerinti parciális deriváltját jelentik: Ugyanígy az f függvény y szerinti parciális deriváltja: f x = xf = f x f y = yf = f y
11. Előadás. 1. Lineáris egyenlőség feltételek melletti minimalizálás
 Optimalizálási eljárások MSc hallgatók számára 11. Előadás Előadó: Hajnal Péter Jegyzetelő: Hajnal Péter 2011. április 27. 1. Lineáris egyenlőség feltételek melletti minimalizálás Múlt héten nem szerepeltek
Optimalizálási eljárások MSc hallgatók számára 11. Előadás Előadó: Hajnal Péter Jegyzetelő: Hajnal Péter 2011. április 27. 1. Lineáris egyenlőség feltételek melletti minimalizálás Múlt héten nem szerepeltek
EuroOffice Optimalizáló (Solver)
") 1. oldal EuroOffice Optimalizáló (Solver) Az EuroOffice Optimalizáló egy OpenOffice.org bővítmény, ami gyors algoritmusokat kínál lineáris programozási és szállítási feladatok megoldására. Szimplex módszer
1. oldal EuroOffice Optimalizáló (Solver) Az EuroOffice Optimalizáló egy OpenOffice.org bővítmény, ami gyors algoritmusokat kínál lineáris programozási és szállítási feladatok megoldására. Szimplex módszer
Panorámakép készítése
 Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
Panorámakép készítése Képregisztráció, 2009. Hantos Norbert Blaskovics Viktor Összefoglalás Panoráma (image stitching, planar mosaicing): átfedő képek összeillesztése Lépések: Előfeldolgozás (pl. intenzitáskorrekciók)
Lineáris leképezések. Wettl Ferenc március 9. Wettl Ferenc Lineáris leképezések március 9. 1 / 31
 Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
Lineáris leképezések Wettl Ferenc 2015. március 9. Wettl Ferenc Lineáris leképezések 2015. március 9. 1 / 31 Tartalom 1 Mátrixleképezés, lineáris leképezés 2 Alkalmazás: dierenciálhatóság 3 2- és 3-dimenziós
További programozási esetek Hiperbolikus, kvadratikus, integer, bináris, többcélú programozás
 További programozási esetek Hiperbolikus, kvadratikus, integer, bináris, többcélú programozás Készítette: Dr. Ábrahám István Hiperbolikus programozás Gazdasági problémák optimalizálásakor gyakori, hogy
További programozási esetek Hiperbolikus, kvadratikus, integer, bináris, többcélú programozás Készítette: Dr. Ábrahám István Hiperbolikus programozás Gazdasági problémák optimalizálásakor gyakori, hogy
A maximum likelihood becslésről
 A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
A maximum likelihood becslésről Definíció Parametrikus becsléssel foglalkozunk. Adott egy modell, mellyel elképzeléseink szerint jól leírható a meghatározni kívánt rendszer. (A modell típusának és rendszámának
Feladatok a Diffrenciálegyenletek IV témakörhöz. 1. Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel.
 Feladatok a Diffrenciálegyenletek IV témakörhöz 1 Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel (a) y 3y 4y = 3e t (b) y 3y 4y = sin t (c) y 3y 4y = 8t
Feladatok a Diffrenciálegyenletek IV témakörhöz 1 Határozzuk meg következő differenciálegyenletek általános megoldását a próba függvény módszerrel (a) y 3y 4y = 3e t (b) y 3y 4y = sin t (c) y 3y 4y = 8t
A Markowitz modell: kvadratikus programozás
 A Markowitz modell: kvadratikus programozás Losonczi László Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar Debrecen, 2011/12 tanév, II. félév Losonczi László (DE) A Markowitz modell 2011/12 tanév,
A Markowitz modell: kvadratikus programozás Losonczi László Debreceni Egyetem, Közgazdaság- és Gazdaságtudományi Kar Debrecen, 2011/12 tanév, II. félév Losonczi László (DE) A Markowitz modell 2011/12 tanév,
Tanulás az idegrendszerben. Structure Dynamics Implementation Algorithm Computation - Function
 Tanulás az idegrendszerben Structure Dynamics Implementation Algorithm Computation - Function Tanulás pszichológiai szinten Classical conditioning Hebb ötlete: "Ha az A sejt axonja elég közel van a B sejthez,
Tanulás az idegrendszerben Structure Dynamics Implementation Algorithm Computation - Function Tanulás pszichológiai szinten Classical conditioning Hebb ötlete: "Ha az A sejt axonja elég közel van a B sejthez,
KOVÁCS BÉLA, MATEMATIKA I.
 KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
KOVÁCS BÉLA MATEmATIkA I 6 VI KOmPLEX SZÁmOk 1 A komplex SZÁmOk HALmAZA A komplex számok olyan halmazt alkotnak amelyekben elvégezhető az összeadás és a szorzás azaz két komplex szám összege és szorzata
Lineáris különböz ségek
 Ivanyos Gábor MTA SZTAKI 2010 december 13 A feladat Titok: u = (µ 1,..., µ n ) n dimenziós vektor Z n 3 -b l Z 3 = az egész számok modulo 3 Gombnyomásra kapunk: véletlen v i = (a i1,..., a in ) vektorokat,
Ivanyos Gábor MTA SZTAKI 2010 december 13 A feladat Titok: u = (µ 1,..., µ n ) n dimenziós vektor Z n 3 -b l Z 3 = az egész számok modulo 3 Gombnyomásra kapunk: véletlen v i = (a i1,..., a in ) vektorokat,
1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás)
") Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
Matematika A2c gyakorlat Vegyészmérnöki, Biomérnöki, Környezetmérnöki szakok, 2017/18 ősz 1. feladatsor: Vektorterek, lineáris kombináció, mátrixok, determináns (megoldás) 1. Valós vektorterek-e a következő
A lineáris programozás alapjai
 A lineáris programozás alapjai A konvex analízis alapjai: konvexitás, konvex kombináció, hipersíkok, félterek, extrém pontok, Poliéderek, a Minkowski-Weyl tétel (a poliéderek reprezentációs tétele) Lineáris
A lineáris programozás alapjai A konvex analízis alapjai: konvexitás, konvex kombináció, hipersíkok, félterek, extrém pontok, Poliéderek, a Minkowski-Weyl tétel (a poliéderek reprezentációs tétele) Lineáris
10. Előadás. 1. Feltétel nélküli optimalizálás: Az eljárás alapjai
 Optimalizálási eljárások MSc hallgatók számára 10. Előadás Előadó: Hajnal Péter Jegyzetelő: T. Szabó Tamás 2011. április 20. 1. Feltétel nélküli optimalizálás: Az eljárás alapjai A feltétel nélküli optimalizálásnál
Optimalizálási eljárások MSc hallgatók számára 10. Előadás Előadó: Hajnal Péter Jegyzetelő: T. Szabó Tamás 2011. április 20. 1. Feltétel nélküli optimalizálás: Az eljárás alapjai A feltétel nélküli optimalizálásnál
Fodor Gábor március 17. Fodor Gábor Osztályozás március / 39
 Osztályozás Fodor Gábor 2010. március 17. Fodor Gábor (fodgabor@math.bme.hu) Osztályozás 2010. március 17. 1 / 39 Bevezetés 1 Bevezetés 2 Döntési szabályok 3 Döntési fák 4 Bayes-hálók 5 Lineáris szeparálás
Osztályozás Fodor Gábor 2010. március 17. Fodor Gábor (fodgabor@math.bme.hu) Osztályozás 2010. március 17. 1 / 39 Bevezetés 1 Bevezetés 2 Döntési szabályok 3 Döntési fák 4 Bayes-hálók 5 Lineáris szeparálás
Nem teljesen kitöltött páros összehasonlítás mátrixok sajátérték optimalizálása Newton-módszerrel p. 1/29. Ábele-Nagy Kristóf BCE, ELTE
 Nem teljesen kitöltött páros összehasonlítás mátrixok sajátérték optimalizálása Newton-módszerrel Ábele-Nagy Kristóf BCE, ELTE Bozóki Sándor BCE, MTA SZTAKI 2010. november 4. Nem teljesen kitöltött páros
Nem teljesen kitöltött páros összehasonlítás mátrixok sajátérték optimalizálása Newton-módszerrel Ábele-Nagy Kristóf BCE, ELTE Bozóki Sándor BCE, MTA SZTAKI 2010. november 4. Nem teljesen kitöltött páros
Gibbs-jelenség viselkedésének vizsgálata egyszer négyszögjel esetén
 Matematikai modellek, I. kisprojekt Gibbs-jelenség viselkedésének vizsgálata egyszer négyszögjel esetén Unger amás István B.Sc. szakos matematikus hallgató ungert@maxwell.sze.hu, http://maxwell.sze.hu/~ungert
Matematikai modellek, I. kisprojekt Gibbs-jelenség viselkedésének vizsgálata egyszer négyszögjel esetén Unger amás István B.Sc. szakos matematikus hallgató ungert@maxwell.sze.hu, http://maxwell.sze.hu/~ungert
5. házi feladat. AB, CD kitér élpárra történ tükrözések: Az ered transzformáció: mivel az origó xpont, így nincs szükség homogénkoordinátás
 5. házi feladat 1.feladat A csúcsok: A = (0, 1, 1) T, B = (0, 1, 1) T, C = (1, 0, 0) T, D = ( 1, 0, 0) T AB, CD kitér élpárra történ tükrözések: 1 0 0 T AB = 0 1 0, elotlási rész:(i T AB )A = (0, 0, )
5. házi feladat 1.feladat A csúcsok: A = (0, 1, 1) T, B = (0, 1, 1) T, C = (1, 0, 0) T, D = ( 1, 0, 0) T AB, CD kitér élpárra történ tükrözések: 1 0 0 T AB = 0 1 0, elotlási rész:(i T AB )A = (0, 0, )
Mátrixjátékok tiszta nyeregponttal
 1 Mátrixjátékok tiszta nyeregponttal 1. Példa. Két játékos Aladár és Bendegúz rendelkeznek egy-egy tetraéderrel, melyek lapjaira rendre az 1, 2, 3, 4 számokat írták. Egy megadott jelre egyszerre felmutatják
1 Mátrixjátékok tiszta nyeregponttal 1. Példa. Két játékos Aladár és Bendegúz rendelkeznek egy-egy tetraéderrel, melyek lapjaira rendre az 1, 2, 3, 4 számokat írták. Egy megadott jelre egyszerre felmutatják
Érzékenységvizsgálat
 Érzékenységvizsgálat Alkalmazott operációkutatás 5. elıadás 008/009. tanév 008. október 0. Érzékenységvizsgálat x 0 A x b z= c T x max Kapacitások, együtthatók, célfüggvény együtthatók változnak => optimális
Érzékenységvizsgálat Alkalmazott operációkutatás 5. elıadás 008/009. tanév 008. október 0. Érzékenységvizsgálat x 0 A x b z= c T x max Kapacitások, együtthatók, célfüggvény együtthatók változnak => optimális
Végeselem modellezés alapjai 1. óra
 Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Végeselem modellezés alapjai. óra Gyenge alak, Tesztfüggvény, Lagrange-féle alakfüggvény, Stiness mátrix Kivonat Az óra célja, hogy megismertesse a végeselem módszer (FEM) alkalmazását egy egyszer probléma,
Matematika III előadás
 Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
Matematika III. - 2. előadás Vinczéné Varga Adrienn Debreceni Egyetem Műszaki Kar, Műszaki Alaptárgyi Tanszék Előadáskövető fóliák Vinczéné Varga Adrienn (DE-MK) Matematika III. 2016/2017/I 1 / 23 paramétervonalak,
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
016.03.1. BSC MATEMATIKA II. ELSŐ ÉS MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC AZ ELSŐRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLET FOGALMA Az elsőrendű közönséges differenciálegyenletet
Gazdasági matematika II. tanmenet
 Gazdasági matematika II. tanmenet Mádi-Nagy Gergely A hivatkozásokban az alábbi tankönyvekre utalunk: T: Tóth Irén (szerk.): Operációkutatás I., Nemzeti Tankönyvkiadó 1987. Cs: Csernyák László (szerk.):
Gazdasági matematika II. tanmenet Mádi-Nagy Gergely A hivatkozásokban az alábbi tankönyvekre utalunk: T: Tóth Irén (szerk.): Operációkutatás I., Nemzeti Tankönyvkiadó 1987. Cs: Csernyák László (szerk.):
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 8 VIII. REGREssZIÓ 1. A REGREssZIÓs EGYENEs Két valószínűségi változó kapcsolatának leírására az eddigiek alapján vagy egy numerikus
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 8 VIII. REGREssZIÓ 1. A REGREssZIÓs EGYENEs Két valószínűségi változó kapcsolatának leírására az eddigiek alapján vagy egy numerikus
Lineáris egyenletrendszerek
 Lineáris egyenletrendszerek 1 Alapfogalmak 1 Deníció Egy m egyenletb l álló, n-ismeretlenes lineáris egyenletrendszer általános alakja: a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
Lineáris egyenletrendszerek 1 Alapfogalmak 1 Deníció Egy m egyenletb l álló, n-ismeretlenes lineáris egyenletrendszer általános alakja: a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a
A KroneckerCapelli-tételb l következik, hogy egy Bx = 0 homogén lineáris egyenletrendszernek
 10. gyakorlat Mátrixok sajátértékei és sajátvektorai Azt mondjuk, hogy az A M n mátrixnak a λ IR szám a sajátértéke, ha létezik olyan x IR n, x 0 vektor, amelyre Ax = λx. Ekkor az x vektort az A mátrix
10. gyakorlat Mátrixok sajátértékei és sajátvektorai Azt mondjuk, hogy az A M n mátrixnak a λ IR szám a sajátértéke, ha létezik olyan x IR n, x 0 vektor, amelyre Ax = λx. Ekkor az x vektort az A mátrix
Alap-ötlet: Karl Friedrich Gauss ( ) valószínűségszámítási háttér: Andrej Markov ( )
 valószínűségszámítási háttér: Andrej Markov ( )") Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80 Fa: 463-30-9 http://www.vizgep.bme.hu Alap-ötlet:
Gauss elimináció, LU felbontás
 Közelítő és szimbolikus számítások 3. gyakorlat Gauss elimináció, LU felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 EGYENLETRENDSZEREK 1. Egyenletrendszerek
Közelítő és szimbolikus számítások 3. gyakorlat Gauss elimináció, LU felbontás Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor London András Deák Gábor jegyzetei alapján 1 EGYENLETRENDSZEREK 1. Egyenletrendszerek
1. Parciális függvény, parciális derivált (ismétlés)
") Operációkutatás NYME Gazdaságinformatikus mesterképzés El adó: Kalmár János (kalmar[kukac]inf.nyme.hu) Többváltozós széls érték számítás Parciális függvény, parciális derivált Széls érték korlátos zárt
Operációkutatás NYME Gazdaságinformatikus mesterképzés El adó: Kalmár János (kalmar[kukac]inf.nyme.hu) Többváltozós széls érték számítás Parciális függvény, parciális derivált Széls érték korlátos zárt
A szimplex algoritmus
 A szimplex algoritmus Ismétlés: reprezentációs tétel, az optimális megoldás és az extrém pontok kapcsolata Alapfogalmak: bázisok, bázismegoldások, megengedett bázismegoldások, degenerált bázismegoldás
A szimplex algoritmus Ismétlés: reprezentációs tétel, az optimális megoldás és az extrém pontok kapcsolata Alapfogalmak: bázisok, bázismegoldások, megengedett bázismegoldások, degenerált bázismegoldás
2. SZÉLSŽÉRTÉKSZÁMÍTÁS. 2.1 A széls érték fogalma, létezése
 2 SZÉLSŽÉRTÉKSZÁMÍTÁS DEFINÍCIÓ 21 A széls érték fogalma, létezése Azt mondjuk, hogy az f : D R k R függvénynek lokális (helyi) maximuma (minimuma) van az x 0 D pontban, ha van olyan ε > 0 hogy f(x 0 )
2 SZÉLSŽÉRTÉKSZÁMÍTÁS DEFINÍCIÓ 21 A széls érték fogalma, létezése Azt mondjuk, hogy az f : D R k R függvénynek lokális (helyi) maximuma (minimuma) van az x 0 D pontban, ha van olyan ε > 0 hogy f(x 0 )
Babeş Bolyai Tudományegyetem, Kolozsvár Matematika és Informatika Kar Magyar Matematika és Informatika Intézet
 / Babeş Bolyai Tudományegyetem, Kolozsvár Matematika és Informatika Kar Magyar Matematika és Informatika Intézet / Tartalom 3/ kernelek segítségével Felügyelt és félig-felügyelt tanulás felügyelt: D =
/ Babeş Bolyai Tudományegyetem, Kolozsvár Matematika és Informatika Kar Magyar Matematika és Informatika Intézet / Tartalom 3/ kernelek segítségével Felügyelt és félig-felügyelt tanulás felügyelt: D =
Gyártórendszerek modellezése: MILP modell PNS feladatokhoz
 Gyártórendszerek modellezése MILP modell PNS feladatokhoz 1 Pannon Egyetem M szaki Informatikai Kar Számítástudomány Alkalmazása Tanszék Utolsó frissítés: 2008. november 16. 1 hegyhati@dcs.uni-pannon.hu
Gyártórendszerek modellezése MILP modell PNS feladatokhoz 1 Pannon Egyetem M szaki Informatikai Kar Számítástudomány Alkalmazása Tanszék Utolsó frissítés: 2008. november 16. 1 hegyhati@dcs.uni-pannon.hu
Differenciálegyenletek megoldása próbafüggvény-módszerrel
 Differenciálegyenletek megoldása próbafüggvény-módszerrel Ez még nem a végleges változat, utoljára módosítva: 2012. április 9.19:38. Elsőrendű egyenletek Legyen adott egy elsőrendű lineáris állandó együtthatós
Differenciálegyenletek megoldása próbafüggvény-módszerrel Ez még nem a végleges változat, utoljára módosítva: 2012. április 9.19:38. Elsőrendű egyenletek Legyen adott egy elsőrendű lineáris állandó együtthatós
Vektorok, mátrixok, lineáris egyenletrendszerek
 a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
a Matematika mérnököknek I. című tárgyhoz Vektorok, mátrixok, lineáris egyenletrendszerek Vektorok A rendezett valós számpárokat kétdimenziós valós vektoroknak nevezzük. Jelölésükre latin kisbetűket használunk.
A SVM OSZTÁLYOZÁSI ELJÁRÁS ALKALMAZÁSÁNAK Az SVM osztályozási GYAKORLATI eljárás alkalmazásának TAPASZTALATAI gyakorlati tapasztalatai
 A SVM OSZTÁLYOZÁSI ELJÁRÁS ALKALMAZÁSÁNAK Az SVM osztályozási GYAKORLATI eljárás alkalmazásának TAPASZTALATAI gyakorlati tapasztalatai Dr. Kozma-Bognár Veronika 1 - Szilágyi Judit 2 - Kőrösy Péter Ernő
A SVM OSZTÁLYOZÁSI ELJÁRÁS ALKALMAZÁSÁNAK Az SVM osztályozási GYAKORLATI eljárás alkalmazásának TAPASZTALATAI gyakorlati tapasztalatai Dr. Kozma-Bognár Veronika 1 - Szilágyi Judit 2 - Kőrösy Péter Ernő
I. LABOR -Mesterséges neuron
 I. LABOR -Mesterséges neuron A GYAKORLAT CÉLJA: A mesterséges neuron struktúrájának az ismertetése, neuronhálókkal kapcsolatos elemek, alapfogalmak bemutatása, aktivációs függvénytípusok szemléltetése,
I. LABOR -Mesterséges neuron A GYAKORLAT CÉLJA: A mesterséges neuron struktúrájának az ismertetése, neuronhálókkal kapcsolatos elemek, alapfogalmak bemutatása, aktivációs függvénytípusok szemléltetése,
1. Homogén lineáris egyenletrendszer megoldástere
 X HOMOGÉN LINEÁRIS EGYENLET- RENDSZEREK 1 Homogén lineáris egyenletrendszer megoldástere Homogén lineáris egyenletrendszer definíciója már szerepelt Olyan lineáris egyenletrendszert nevezünk homogénnek,
X HOMOGÉN LINEÁRIS EGYENLET- RENDSZEREK 1 Homogén lineáris egyenletrendszer megoldástere Homogén lineáris egyenletrendszer definíciója már szerepelt Olyan lineáris egyenletrendszert nevezünk homogénnek,
Matematika. 4. konzultáció: Kétváltozós függvények szélsőértéke. Parciális függvény, parciális derivált
 Matematika 1 NYME KTK, Egyetemi kiegészítő alapképzés 2004/2005. tanév, I. évf. I.félév Budapest Előadó: Dr. Takách Géza NyME FMK Informatikai Intézet 9400 Sopron, Bajcsy Zs. u. 9. GT fszt. 3. (99) 518
Matematika 1 NYME KTK, Egyetemi kiegészítő alapképzés 2004/2005. tanév, I. évf. I.félév Budapest Előadó: Dr. Takách Géza NyME FMK Informatikai Intézet 9400 Sopron, Bajcsy Zs. u. 9. GT fszt. 3. (99) 518
DIFFERENCIAEGYENLETEK
 DIFFERENCIAEGYENLETEK Példa: elsőrendű állandó e.h. lineáris differenciaegyenlet Ennek megoldása: Kezdeti feltétellel: Kezdeti feltétel nélkül ha 1 és a végtelen összeg (abszolút) konvergens: / 1 Minden
DIFFERENCIAEGYENLETEK Példa: elsőrendű állandó e.h. lineáris differenciaegyenlet Ennek megoldása: Kezdeti feltétellel: Kezdeti feltétel nélkül ha 1 és a végtelen összeg (abszolút) konvergens: / 1 Minden
Least Squares becslés
 Least Squares becslés A négyzetes hibafüggvény: i d i ( ) φx i A négyzetes hibafüggvény mellett a minimumot biztosító megoldás W=( d LS becslés A gradiens számítása és nullává tétele eredményeképp A megoldás
Least Squares becslés A négyzetes hibafüggvény: i d i ( ) φx i A négyzetes hibafüggvény mellett a minimumot biztosító megoldás W=( d LS becslés A gradiens számítása és nullává tétele eredményeképp A megoldás
2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve trigonometrikus alakban vannak megadva?
 = komolyabb bizonyítás (jeleshez) Ellenőrző kérdések 2006 ősz 1. Definiálja a komplex szám és műveleteinek fogalmát! 2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve
= komolyabb bizonyítás (jeleshez) Ellenőrző kérdések 2006 ősz 1. Definiálja a komplex szám és műveleteinek fogalmát! 2. Hogyan számíthatjuk ki két komplex szám szorzatát, ha azok a+bi alakban, illetve
12. Mikor nevezünk egy részhalmazt nyíltnak, illetve zártnak a valós számok körében?
 Ellenörző Kérdések 1. Mit jelent az, hogy egy f : A B függvény injektív, szürjektív, illetve bijektív? 2. Mikor nevezünk egy függvényt invertálhatónak? 3. Definiálja a komplex szám és műveleteinek fogalmát!
Ellenörző Kérdések 1. Mit jelent az, hogy egy f : A B függvény injektív, szürjektív, illetve bijektív? 2. Mikor nevezünk egy függvényt invertálhatónak? 3. Definiálja a komplex szám és műveleteinek fogalmát!
Vektorterek. Wettl Ferenc február 17. Wettl Ferenc Vektorterek február / 27
 Vektorterek Wettl Ferenc 2015. február 17. Wettl Ferenc Vektorterek 2015. február 17. 1 / 27 Tartalom 1 Egyenletrendszerek 2 Algebrai struktúrák 3 Vektortér 4 Bázis, dimenzió 5 Valós mátrixok és egyenletrendszerek
Vektorterek Wettl Ferenc 2015. február 17. Wettl Ferenc Vektorterek 2015. február 17. 1 / 27 Tartalom 1 Egyenletrendszerek 2 Algebrai struktúrák 3 Vektortér 4 Bázis, dimenzió 5 Valós mátrixok és egyenletrendszerek
LINEÁRIS PROGRAMOZÁSI FELADATOK MEGOLDÁSA SZIMPLEX MÓDSZERREL
 LINEÁRIS PROGRAMOZÁSI FELADATOK MEGOLDÁSA SZIMPLEX MÓDSZERREL x 1-2x 2 6 -x 1-3x 3 = -7 x 1 - x 2-3x 3-2 3x 1-2x 2-2x 3 4 4x 1-2x 2 + x 3 max Alapfogalmak: feltételrendszer (narancs színnel jelölve), célfüggvény
LINEÁRIS PROGRAMOZÁSI FELADATOK MEGOLDÁSA SZIMPLEX MÓDSZERREL x 1-2x 2 6 -x 1-3x 3 = -7 x 1 - x 2-3x 3-2 3x 1-2x 2-2x 3 4 4x 1-2x 2 + x 3 max Alapfogalmak: feltételrendszer (narancs színnel jelölve), célfüggvény
Legkisebb négyzetek módszere, Spline interpoláció
 Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
Közelítő és szimbolikus számítások 10. gyakorlat Legkisebb négyzetek módszere, Spline interpoláció Készítette: Gelle Kitti Csendes Tibor Somogyi Viktor Vinkó Tamás London András Deák Gábor jegyzetei alapján
A KLT (Kanade Lucas Tomasi) Feature Tracker Működése (jellegzetes pontok választása és követése)
 Feature Tracker Működése (jellegzetes pontok választása és követése)") A KL (Kanade Lucas omasi) Feature racker Működése (jellegzetes pontok választása és követése) Készítette: Hajder Levente 008.11.18. 1. Feladat A rendelkezésre álló videó egy adott képkockájából minél több
A KL (Kanade Lucas omasi) Feature racker Működése (jellegzetes pontok választása és követése) Készítette: Hajder Levente 008.11.18. 1. Feladat A rendelkezésre álló videó egy adott képkockájából minél több
Matematikai geodéziai számítások 5.
 Matematikai geodéziai számítások 5 Hibaterjedési feladatok Dr Bácsatyai László Matematikai geodéziai számítások 5: Hibaterjedési feladatok Dr Bácsatyai László Lektor: Dr Benedek Judit Ez a modul a TÁMOP
Matematikai geodéziai számítások 5 Hibaterjedési feladatok Dr Bácsatyai László Matematikai geodéziai számítások 5: Hibaterjedési feladatok Dr Bácsatyai László Lektor: Dr Benedek Judit Ez a modul a TÁMOP
HORNUNG TAMÁS * Diszkrét egyenletes közelítés: a lineáris programozás egy alkalmazása
 Bevezetés HORNUNG TAMÁS * Diszkrét egyenletes közelítés: a lineáris programozás egy alkalmazása Discrete smooth approximation: an application of linear programming The best discrete approximation can be
Bevezetés HORNUNG TAMÁS * Diszkrét egyenletes közelítés: a lineáris programozás egy alkalmazása Discrete smooth approximation: an application of linear programming The best discrete approximation can be
Név KP Blokk neve KP. Logisztika I. 6 LOG 12 Dr. Kovács Zoltán Logisztika II. 6 Logisztika Dr. Kovács Zoltán
 Név KP Blokk neve KP Felelıs vizsgáztató Kombinatorikus módszerek és algoritmusok 5 MAT 10 Dr. Tuza Zsolt Diszkrét és folytonos dinamikai rendszerek matematikai alapjai 5 Matematika Dr. Hartung Ferenc
Név KP Blokk neve KP Felelıs vizsgáztató Kombinatorikus módszerek és algoritmusok 5 MAT 10 Dr. Tuza Zsolt Diszkrét és folytonos dinamikai rendszerek matematikai alapjai 5 Matematika Dr. Hartung Ferenc
Pletykaalapú gépi tanulás teljesen elosztott környezetben
 Pletykaalapú gépi tanulás teljesen elosztott környezetben Hegedűs István Jelasity Márk témavezető Szegedi Tudományegyetem MTA-SZTE Mesterséges Intelligencia Kutatócsopot Motiváció Az adat adatközpontokban
Pletykaalapú gépi tanulás teljesen elosztott környezetben Hegedűs István Jelasity Márk témavezető Szegedi Tudományegyetem MTA-SZTE Mesterséges Intelligencia Kutatócsopot Motiváció Az adat adatközpontokban
Lineáris algebra és a rang fogalma (el adásvázlat, szeptember 29.) Maróti Miklós
 Maróti Miklós") Lineáris algebra és a rang fogalma (el adásvázlat, 2010. szeptember 29.) Maróti Miklós Ennek az el adásnak a megértéséhez a következ fogalmakat kell tudni: (1) A mátrixalgebrával kapcsolatban: számtest
Lineáris algebra és a rang fogalma (el adásvázlat, 2010. szeptember 29.) Maróti Miklós Ennek az el adásnak a megértéséhez a következ fogalmakat kell tudni: (1) A mátrixalgebrával kapcsolatban: számtest
Sapientia - Erdélyi Magyar TudományEgyetem (EMTE) Csíkszereda IRT- 4. kurzus. 3. Előadás: A mohó algoritmus
 Csíkszereda IRT- 4. kurzus. 3. Előadás: A mohó algoritmus") Csíkszereda IRT-. kurzus 3. Előadás: A mohó algoritmus 1 Csíkszereda IRT. kurzus Bevezetés Az eddig tanult algoritmus tipúsok nem alkalmazhatók: A valós problémák nem tiszta klasszikus problémák A problémák
Csíkszereda IRT-. kurzus 3. Előadás: A mohó algoritmus 1 Csíkszereda IRT. kurzus Bevezetés Az eddig tanult algoritmus tipúsok nem alkalmazhatók: A valós problémák nem tiszta klasszikus problémák A problémák
Érdekes informatika feladatok
 A keres,kkel és adatbázissal ellátott lengyel honlap számos díjat kapott: Spirit of Delphi '98, Delphi Community Award, Poland on the Internet, Golden Bagel Award stb. Az itt megtalálható komponenseket
A keres,kkel és adatbázissal ellátott lengyel honlap számos díjat kapott: Spirit of Delphi '98, Delphi Community Award, Poland on the Internet, Golden Bagel Award stb. Az itt megtalálható komponenseket
Követelmények Motiváció Matematikai modellezés: példák A lineáris programozás alapfeladata 2017/ Szegedi Tudományegyetem Informatikai Intézet
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 1. Előadás Követelmények, teljesítés feltételei Vizsga anyaga Előadásokhoz tartozó diasor
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 1. Előadás Követelmények, teljesítés feltételei Vizsga anyaga Előadásokhoz tartozó diasor
DIFFERENCIÁLEGYENLETEK. BSc. Matematika II. BGRMA2HNND, BGRMA2HNNC
 BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
BSC MATEMATIKA II. MÁSODRENDŰ LINEÁRIS DIFFERENCIÁLEGYENLETEK BSc. Matematika II. BGRMAHNND, BGRMAHNNC MÁSODRENDŰ DIFFERENCIÁLEGYENLETEK Egy explicit közönséges másodrendű differenciálegyenlet általános
Tanulási cél Szorzatfüggvényekre vonatkozó integrálási technikák megismerése és különböző típusokra való alkalmazása. 5), akkor
, akkor") Integrálszámítás Integrálási szabályok Tanulási cél Szorzatfüggvényekre vonatkozó integrálási technikák megismerése és különböző típusokra való alkalmazása Motivációs feladat Valószínűség-számításnál találkozhatunk
Integrálszámítás Integrálási szabályok Tanulási cél Szorzatfüggvényekre vonatkozó integrálási technikák megismerése és különböző típusokra való alkalmazása Motivációs feladat Valószínűség-számításnál találkozhatunk
1. Számsorok, hatványsorok, Taylor-sor, Fourier-sor
 . Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következ végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle bels konvergenciakritérium) A a n végtelen sor akkor és csakis
. Számsorok, hatványsorok, Taylor-sor, Fourier-sor Vizsgálja meg a következ végtelen sorokat konvergencia szempontjából. Tétel. (Cauchy-féle bels konvergenciakritérium) A a n végtelen sor akkor és csakis
Követelmények Motiváció Matematikai modellezés: példák A lineáris programozás alapfeladata 2017/ Szegedi Tudományegyetem Informatikai Intézet
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 1. Előadás Követelmények, teljesítés feltételei Vizsga anyaga Előadásokhoz tartozó diasor
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 1. Előadás Követelmények, teljesítés feltételei Vizsga anyaga Előadásokhoz tartozó diasor
6. Előadás. Megyesi László: Lineáris algebra, oldal. 6. előadás Bázis, dimenzió
 6. Előadás Megyesi László: Lineáris algebra, 37. 41. oldal. Gondolkodnivalók Lineáris függetlenség 1. Gondolkodnivaló Legyen V valós számtest feletti vektortér. Igazolja, hogy ha a v 1, v 2,..., v n V
6. Előadás Megyesi László: Lineáris algebra, 37. 41. oldal. Gondolkodnivalók Lineáris függetlenség 1. Gondolkodnivaló Legyen V valós számtest feletti vektortér. Igazolja, hogy ha a v 1, v 2,..., v n V
MÉSZÁROS JÓZSEFNÉ, NUMERIKUS MÓDSZEREK
 MÉSZÁROS JÓZSEFNÉ, NUmERIKUS módszerek 9 FÜGGVÉNYKÖZELÍTÉSEK IX. SPLINE INTERPOLÁCIÓ 1. SPLINE FÜGGVÉNYEK A Lagrange interpolációnál említettük, hogy az ún. globális interpoláció helyett gyakran célszerű
MÉSZÁROS JÓZSEFNÉ, NUmERIKUS módszerek 9 FÜGGVÉNYKÖZELÍTÉSEK IX. SPLINE INTERPOLÁCIÓ 1. SPLINE FÜGGVÉNYEK A Lagrange interpolációnál említettük, hogy az ún. globális interpoláció helyett gyakran célszerű
Branch-and-Bound. 1. Az egészértéketű programozás. a korlátozás és szétválasztás módszere Bevezető Definíció. 11.
 11. gyakorlat Branch-and-Bound a korlátozás és szétválasztás módszere 1. Az egészértéketű programozás 1.1. Bevezető Bizonyos feladatok modellezése kapcsán előfordulhat olyan eset, hogy a megoldás során
11. gyakorlat Branch-and-Bound a korlátozás és szétválasztás módszere 1. Az egészértéketű programozás 1.1. Bevezető Bizonyos feladatok modellezése kapcsán előfordulhat olyan eset, hogy a megoldás során
Lineáris egyenletrendszerek
 Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
Lineáris egyenletrendszerek Lineáris egyenletrendszernek nevezzük az a 11 x 1 + a 12 x 2 +... +a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... +a 2n x n = b 2.. a k1 x 1 + a k2 x 2 +... +a kn x n = b k n ismeretlenes,
3. Lineáris differenciálegyenletek
 3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
3. Lineáris differenciálegyenletek A közönséges differenciálegyenletek két nagy csoportba oszthatók lineáris és nemlineáris egyenletek csoportjába. Ez a felbontás kicsit önkényesnek tűnhet, a megoldásra
Megoldás: Mindkét állítás hamis! Indoklás: a) Azonos alapú hatványokat úgy szorzunk, hogy a kitevőket összeadjuk. Tehát: a 3 * a 4 = a 3+4 = a 7
 Azonos alapú hatványokat úgy szorzunk, hogy a kitevőket összeadjuk. Tehát: a 3 * a 4 = a 3+4 = a 7") A = {1; 3; 5; 7; 9} A B = {3; 5; 7} A/B = {1; 9} Mindkét állítás hamis! Indoklás: a) Azonos alapú hatványokat úgy szorzunk, hogy a kitevőket összeadjuk. Tehát: a 3 * a 4 = a 3+4 = a 7 Azonos alapú hatványokat
A = {1; 3; 5; 7; 9} A B = {3; 5; 7} A/B = {1; 9} Mindkét állítás hamis! Indoklás: a) Azonos alapú hatványokat úgy szorzunk, hogy a kitevőket összeadjuk. Tehát: a 3 * a 4 = a 3+4 = a 7 Azonos alapú hatványokat
Saj at ert ek-probl em ak febru ar 26.
 Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Sajátérték-problémák 2018. február 26. Az alapfeladat Adott a következő egyenlet: Av = λv, (1) ahol A egy ismert mátrix v ismeretlen, nem zérus vektor λ ismeretlen szám Azok a v, λ kombinációk, amikre
Operációkutatás. Vaik Zsuzsanna. Budapest október 10. First Prev Next Last Go Back Full Screen Close Quit
 Operációkutatás Vaik Zsuzsanna Vaik.Zsuzsanna@ymmfk.szie.hu Budapest 200. október 10. Mit tanulunk ma? Szállítási feladat Megoldása Adott: Egy árucikk, T 1, T 2, T,..., T m termelőhely, melyekben rendre
Operációkutatás Vaik Zsuzsanna Vaik.Zsuzsanna@ymmfk.szie.hu Budapest 200. október 10. Mit tanulunk ma? Szállítási feladat Megoldása Adott: Egy árucikk, T 1, T 2, T,..., T m termelőhely, melyekben rendre
Szemidenit optimalizálás és az S-lemma
 Szemidenit optimalizálás és az S-lemma Pólik Imre SAS Institute, USA BME Optimalizálás szeminárium 2011. október 6. Outline 1 Egyenl tlenségrendszerek megoldhatósága 2 Az S-lemma 3 Szemidenit kapcsolatok
Szemidenit optimalizálás és az S-lemma Pólik Imre SAS Institute, USA BME Optimalizálás szeminárium 2011. október 6. Outline 1 Egyenl tlenségrendszerek megoldhatósága 2 Az S-lemma 3 Szemidenit kapcsolatok