Az intraorális lenyomatvételi eljárások matematikai, informatikai háttere. Passzív- és aktív háromszögelési módszer Időmérésen alapuló módszer
|
|
|
- Elvira Pintérné
- 8 évvel ezelőtt
- Látták:
Átírás
1 Az intraorális lenyomatvételi eljárások matematikai, informatikai háttere Passzív- és aktív háromszögelési módszer Időmérésen alapuló módszer Papp Ildikó, DE-IK, 2017
2 Az intraorális lenyomatvételi eljárások matematikai, informatikai háttere 1. rész ( ) Vázlat 3D szkennelés és alkalmazásai Pontfelhő Poligonháló/Háromszögháló Felületmodell Passzív háromszögelés o Sztereo látás o epipoláris geometria Aktív háromszögelés- Struktúrált fény-alapú technika o Lézerpont vetítése o Fénycsík(ok) vetítése (Single-axis encoding) o Statikus minta vetítése(double-axis encoding) o Bináris kódolás o Színes kódolás Time of Flight AMCW

3 3D szkennelés Egy létező térbeli objektumról digitális modellt készítünk valamilyen eszközzel, amely alkalmas arra, hogy az objektum pontjainak térbeli koordinátáit kimérje, vagy szoftver segítségével kiszámolja. Széles körben alkalmazható: Digitális dokumentáció készítése Restaurálás Archiválás Reverse engineering Robotika Valós objektumok megjelenítése VR környezetben Egészségügy Sense 3D testszkenner működés közben Egy Sense szkennerrel készült modell megtekinthető a skövetkező oldalon:

4 3D szkennelés Egy 3D szkenner működése különféle fizikai, matematikai, informatikai megoldások együttesén alapul. Befolyásoló tényezők: Mekkora tárgyat kell szkennelnünk? Mennyire tudjuk megközelíteni? Kompakt eszközt szeretnénk? Van-e szükség utólagos feldolgozásra? A heti témakörök: Passzív háromszögelés Aktív háromszögelés Time of Flight technika Egy arc szkennelése:


5 A 3D szkennelés eredménye A szkennelés eredménye: több ezer pont térbeli koordinátája Ebből szükség szerint pontfelhő jeleníthető meg, vagy a feldolgozás során poligonhálóvá alakítható. Pontfelhő Poligonhláló



6 A pontfelhő egy mintavételezésből származó, térbeli pontok nem strukturált halmaza egy koordinátarendszerben. Minden pont ebben a koordinátarendszerben a az X, Y, Z koordinátákkal írható le. Megjelenítve a felület illúzióját kelti, de a pontok között nincs kapcsolat, nincs klasszikus értelemben vett felületünk. A pontfelhő közvetlenül nem kezelhető, ezért poligonhálóvá szokás alakítani. Ekkor a pontok egy részét elvetjük, és a maradék pontok között összeköttetéseket hozunk létre. Pontfelhő
 A leíró adatstruktúra: A csúcsok listája (a csúcsok koordinátákal megadva) Lapok tárolása a csúcsok és az élek felsorolásával.")
7 Poligonháló A poligonhálót jellemzően egy felület megjelenítésére használjuk. A felületi lapok (facet) élek esetében a egy csúcsban több (változó számú) poligonlap is találkozik. (A hálók nem feltétlenül jelentenek háromszöghálót.) A leíró adatstruktúra: A csúcsok listája (a csúcsok koordinátákal megadva) Lapok tárolása a csúcsok és az élek felsorolásával. MeshLab : A háromszöghálók szerkesztésére szolgáló szoftver. (köv. hét gyakorlata)



8 A 3D szkennelés eredménye A jelenet Renderelt felületmodell a háromszögháló alapján Textúrázott felületmodell

9 Passzív háromszögelési technika Sztereo kamerarendszer alkalmazása: Két különböző irányból készítünk képet a tárgyról, épületről. Egy térbeli pont helyzete kiszámítható, ha azok mindkét képen beazonosításra kerültek. A legnehezebb az azonosított pontpárok megtalálása, amely nehezen automatizálható. Passzív: a képek készítése után bárhol, és bármikor elvégezhetők a számítások, nem azonnal történik a képek feldolgozása.
10 A sztereo kamerarendszer paraméterei P A képek egymáshoz viszonyított helyzete. A kamerák egymástól mért távolsága. (O 1 és O 2 távolság) P 1 P 2 A képek középpontjai (a kamerák merőleges vetülete a képen). A kamerák képsíktól mért távolsága. O 1 O 2 + Történt-e valamilyen nagyítás, vagy kicsinyítés a kép készítése után, és ha igen, akkor annak az aránya.


11 E E 2 1 O O 1 2 P P 1 P 2 Epipólus (O 2 képe O 1 -ből vetítve) Epipoláris geometria A sztereo képekkel történő számítások alapja az epipoláris geometria. Epipoláris sík Epipoláris egyenesek Epipólus (O 1 képe O 2 -ből vetítve) Epipoláris sík: A jelenet P pontja és az O 1, O 2 vetítési középpontok feszítik fel. Epipoláris egyenesek: Az epipoláris sík és a képsíkok metszésvonalai. Epilólusok: Az O 1 és O 2 vetítési középpontok képe a másik képsíkon.
12 Epipoláris geometria A sztereo képekkel történő számítások alapja az epipoláris geometria. Tapasztalat: A P 1 pont mögötti térbeli pontok képei a jobb oldali felvételen egy egyenesre illeszkednek. (Ez az epipoláris egyenes!) P 1 O 1 O 2
13 Epipoláris geometria A vetítősugarak visszaállítása során szinte minden esetben van valamilyen mértékű számolási pontatlanság. Ennek következménye, hogy a kiszámolt sugarak elkerülik egymást. Az eredeti metszéspontot helyettesítő pont: a két egyenestől egyenlő távolságra van Az ilyen tulajdonságú pontok közül ez van legközelebb az egyenesekhez. O 1 O 2
14 Rektifikálás: a képek kiegyenesítése A számolások egyszerűsítése érdekében a képeket kiegyenesítjük : az optikai középpontok által meghatározott egyenessel párhuzamos síkra leképezzük azokat úgy, hogy az epipolárisok egyetlen vonalat alkossanak.


15 Rektifikálás: a képek kiegyenesítése Rektifikálás előtti képek Rektifikálás utáni képek


16 Gyakorlati alkalmazás Magyar fejlesztésű mobil app (Androidra) Passzív háromszögelésen alapszik. Nem felhőalapú, nem kell feltölteni a képeket, és a számolás sem a felhőben történik. A hivatalos videó: A tárgyat körbe kell fényképezni, legalább kép kell, melyek átfedőek legyenek. A direkt megvilágítás nem jó a keletkező árnyékok miatt, egy napsütéses napon a szórt fényben teljesít legjobban. Az eddig legjobb szkennem: Letölthető a Google Play-ről:

17 Aktív háromszögelési technika Fényforrás Kamera A fényforrás-kamera rendszer adatai d Bázistávolság (fényforrás-kamera távolsága). A kibocsátott fénysugár bázisvonallal bezárt szöge: A jelenet egy pontjába mutató sugár bázisvonallal bezárt szöge: Ezen adatokból számítható a vizsgált pont kamerától mért távolsága. A jelenet egy P pontja


18 Struktúrált fény alapú technika Két kamera helyett egy kamerát és egy fényforrást alkalmazunk. Egy jól ismert mintázatot (pontrácsot, vonalat, vonalrendszert) vetítünk az alakzatra, a minta deformálódik a felületen. Feladat: egy adott mintázat dekódolása.




19 Szkennelés egyetlen fénycsík vetítésével Digital Michelangelo Project Cyberware arc- és fejszkenner
20 Egyirányú / kétirányú kódolás Egyirányú kódolás esetén egy térbeli pont beazonosítása: egy egyenes és egy sík metszéspontja. Kétirányú kódolás esetén egy térbeli pont beazonosítása: két egyenes metszéspontja.


21 Bináris kódolás alapelve A kiválasztott pixel kódja 3 minta alkalmazása után: 101 További finomítással az egyre keskenyebb sávok jobban azonosítják a vetített mintázatot. Időben egymás után vetítve Minta 3 Minta 2 Minta 1


22 Bináris kódolás alapelve Nagy kontraszt könnyű szegmentálás n db vetített minta n bites kód 2 n db sáv A vetített minták számát befolyásolhatja az alakzat térbeli kiterjedése, többnyire a képen látható 32 sáv még nem eredményez elég vékony vonalazást.



23 Színes kódolás alapelve A mintázat érzékelése a legtöbb esetben a szokásos RGB színcsatornákon történik. Így lehetőség van külön mintázatok megadására csatornánként, melyek egyfajta kombinálására lesz a vetített mintázat.



24 Aktív háromszögelési technika egyetlen fénycsík sok kép lassú nagyon pontos modell több fénycsík több kép közepesen lassú eléggé pontos modell strukturált mintázat egy kép gyors kevésbé pontos modell Digital Michelangelo Project:


25 Lehet-e olcsón szkennelni? Szkennelés árnyékkal: Lámpa a megvilágításhoz Pálca, amely az árnyékot veti majd a tárgyra Fényképezőgép Feldolgozó szoftver
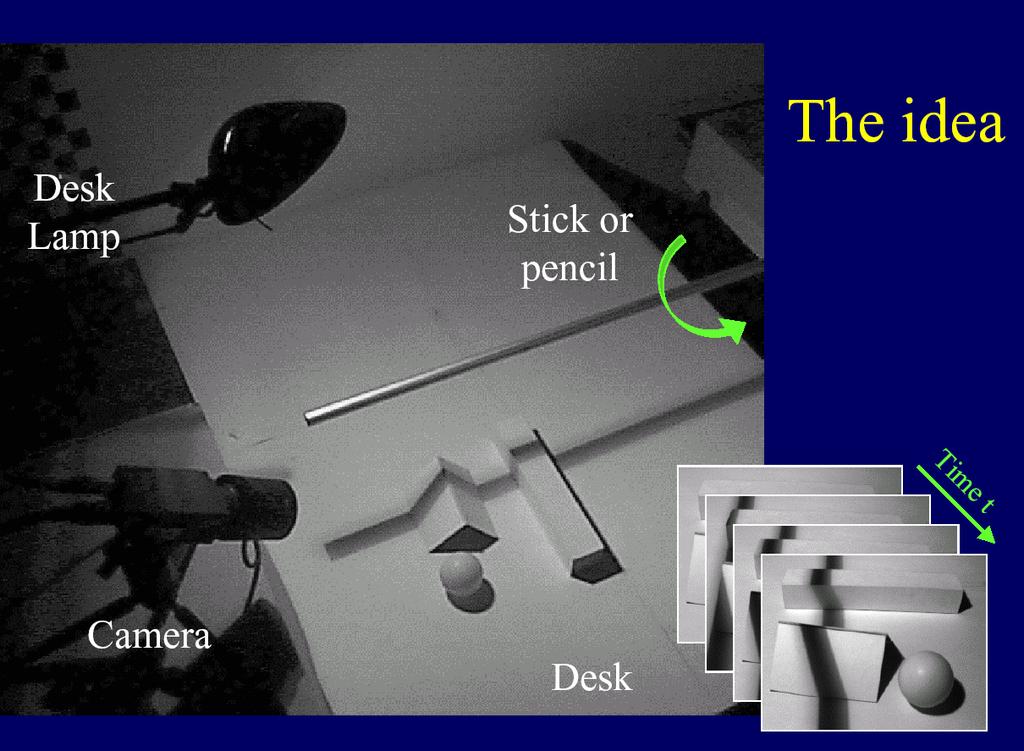
26
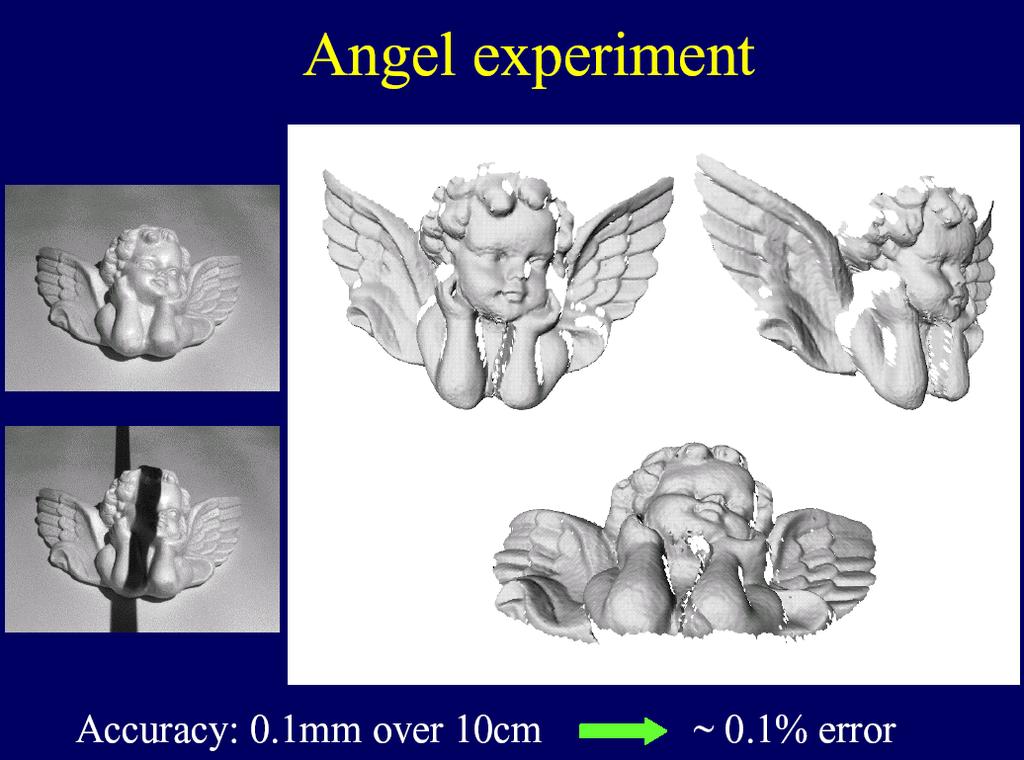
27
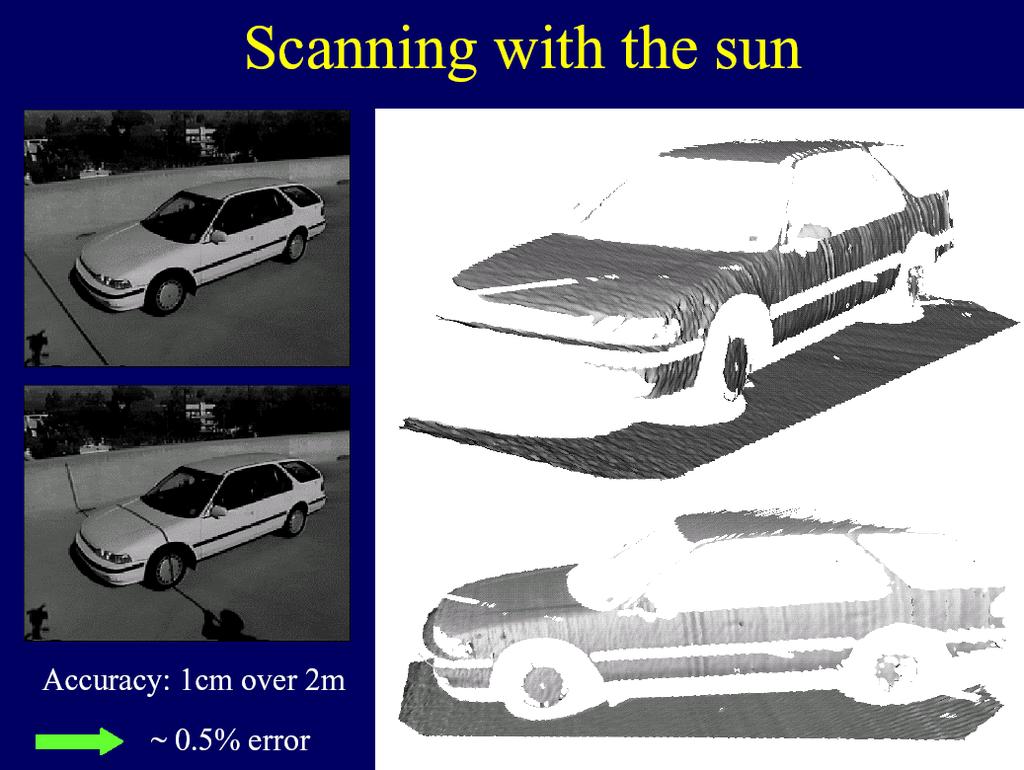
28

29 TOF Time of Flight technika Az ötlet forrás a természetben: echolokáció A denevérek (delfinek) a visszavert hang segítségével határozzák meg az előttük lévő akadályok vagy a táplálék helyét, helyzetét.
 Optika")


30 TOF Time of Flight technika Környezetből érkező fények Fényforrás Idő mérése Érzékelő Mélység A TOF kamera részei Fénykibocsátó egység (infravörös LED vagy lézerdióda) Optika feladata visszaverődő fény összegyűjtése, infravörös tartományra való szűrés, háttérzajok kiszűrése Képalkotó feladata: a megtett út kiszámítása a kép minden egyes pixelére. Vezérlő elektronika biztosítja a fénykibocsájtó és a képalkotó nagyon gyors működését.

31 AMCW - Amplitude Modulated Continuous Wave Moduláló jel Vivő jel Amplitúdó modulálás Az üzenet az amplitúdóba van kódolva. A vivő jel frekvenciája nagyobb, mint a moduláló jelé. Amplitúdó modulált jel Fényforrás Érzékelő Fáziseltolódás mérése Mélység
 A szkennelés")



32 Mélységi térkép (Depth map) A szkennelés eredményeként mért mélységi információk egy kétdimenziós tömbben tárolódnak. A mélységi térkép megjeleníthető egy szürkeárnyalatos képként.
5. 3D rekonstrukció. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 5. 3D rekonstrukció Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 PASSZÍV SZTEREÓ 3 Passzív sztereó 3D rekonstrukció egy sztereó kamera
5. 3D rekonstrukció Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 PASSZÍV SZTEREÓ 3 Passzív sztereó 3D rekonstrukció egy sztereó kamera
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D számítógépes geometria és alakzatrekonstrukció 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás 15. Digitális Alakzatrekonstrukció Méréstechnológia, Ponthalmazok regisztrációja http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav54
(Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.
 Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.") Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
3D számítógépes geometria és alakzatrekonstrukció
 3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
3D számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
A tér lineáris leképezései síkra
 A tér lineáris leképezései síkra Az ábrázoló geometria célja: A háromdimenziós térben elhelyezkedő alakzatok helyzeti és metrikus viszonyainak egyértelmű és egyértelműen rekonstruálható módon történő ábrázolása
A tér lineáris leképezései síkra Az ábrázoló geometria célja: A háromdimenziós térben elhelyezkedő alakzatok helyzeti és metrikus viszonyainak egyértelmű és egyértelműen rekonstruálható módon történő ábrázolása
3D-s számítógépes geometria és alakzatrekonstrukció
 3D-s számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás,
3D-s számítógépes geometria és alakzatrekonstrukció 14. Digitális Alakzatrekonstrukció - Bevezetés http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiiav08 Dr. Várady Tamás,
Fotogrammetriai munkaállomások szoftvermoduljainak tervezése. Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar
 Fotogrammetriai munkaállomások szoftvermoduljainak tervezése Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar Témakörök DPW szoftvermodulok Szoftverek funkciói Pár példa Mi hiányzik gyakran?
Fotogrammetriai munkaállomások szoftvermoduljainak tervezése Dr. habil. Jancsó Tamás Óbudai Egyetem, Alba Regia Műszaki Kar Témakörök DPW szoftvermodulok Szoftverek funkciói Pár példa Mi hiányzik gyakran?
Láthatósági kérdések
 Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Láthatósági kérdések Láthatósági algoritmusok Adott térbeli objektum és adott nézőpont esetén el kell döntenünk, hogy mi látható az adott alakzatból a nézőpontból, vagy irányából nézve. Az algoritmusok
Számítógépes Grafika SZIE YMÉK
 Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Számítógépes Grafika SZIE YMÉK Analóg - digitális Analóg: a jel értelmezési tartománya (idő), és az értékkészletes is folytonos (pl. hang, fény) Diszkrét idejű: az értelmezési tartomány diszkrét (pl. a
Számítógépes látás alapjai
 Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 23 Rekonstrukció speciális hardverekkel
Számítógépes látás alapjai Csetverikov Dmitrij, Hajder Levente Eötvös Lóránd Egyetem, Informatikai Kar Csetverikov, Hajder (ELTE Informatikai Kar) Számítógépes látás 1 / 23 Rekonstrukció speciális hardverekkel
Képfeldolgozás Szegmentálás Osztályozás Képfelismerés Térbeli rekonstrukció
 Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs mátrixa 3D-ben?
 . Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
. Mi az (x, y) koordinátákkal megadott pont elforgatás uténi két koordinátája, ha α szöggel forgatunk az origó körül? x = cos αx sin αy y = sin αx + cos αy 2. Mi a X/Y/Z tengely körüli forgatás transzformációs
Tárgy. Forgóasztal. Lézer. Kamera 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL
 3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
3D REKONSTRUKCIÓ LÉZERES LETAPOGATÁSSAL. Bevezetés A lézeres letapogatás a ma elérhet legpontosabb 3D-s rekonstrukciót teszi lehet vé. Alapelve roppant egyszer : egy lézeres csíkkal megvilágítjuk a tárgyat.
Papp Ferenc Barlangkutató Csoport. Barlangtérképezés. Fotómodellezés. Holl Balázs 2014. negyedik változat hatodik kiegészítés 4.6
 Papp Ferenc Barlangkutató Csoport Barlangtérképezés Fotómodellezés Holl Balázs 2014 negyedik változat hatodik kiegészítés 4.6 (első változat 2011) A felszíni térképezés már egy évszázada a légifotókon
Papp Ferenc Barlangkutató Csoport Barlangtérképezés Fotómodellezés Holl Balázs 2014 negyedik változat hatodik kiegészítés 4.6 (első változat 2011) A felszíni térképezés már egy évszázada a légifotókon
3. tétel Térelemek távolsága és szöge. Nevezetes ponthalmazok a síkon és a térben.
 3. tétel Térelemek távolsága és szöge. Nevezetes ponthalmazok a síkon és a térben. TÁVOLSÁG Általános definíció: két alakzat távolsága a két alakzat pontjai között húzható legrövidebb szakasz hosszaa távolság
3. tétel Térelemek távolsága és szöge. Nevezetes ponthalmazok a síkon és a térben. TÁVOLSÁG Általános definíció: két alakzat távolsága a két alakzat pontjai között húzható legrövidebb szakasz hosszaa távolság
Regresszió számítás. Tartalomjegyzék: GeoEasy V2.05+ Geodéziai Kommunikációs Program
 Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Termék modell. Definíció:
 Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Koordináta-geometria feladatgyűjtemény
 Koordináta-geometria feladatgyűjtemény A feladatok megoldásai a dokumentum végén találhatók Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két csúcs
Koordináta-geometria feladatgyűjtemény A feladatok megoldásai a dokumentum végén találhatók Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két csúcs
Koordináta-geometria feladatok (emelt szint)
") Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Koordináta-geometria feladatok (emelt szint) 1. (ESZÉV Minta (2) 2004.05/7) Egy ABC háromszögben CAB = 30, az ACB = 45. A háromszög két csúcsának koordinátái: A(2; 2) és C(4; 2). Határozza meg a harmadik
Tartalomjegyzék LED hátterek 3 LED gyűrűvilágítók LED sötét látóterű (árnyék) megvilágítók 5 LED mátrix reflektor megvilágítók
 megvilágítók 5 LED mátrix reflektor megvilágítók") 1 Tartalomjegyzék LED hátterek 3 LED gyűrűvilágítók 4 LED sötét látóterű (árnyék) megvilágítók 5 LED mátrix reflektor megvilágítók 6 HEAD LUXEON LED vezérelhető reflektorok 7 LUXEON LED 1W-os, 3W-os, 5W-os
1 Tartalomjegyzék LED hátterek 3 LED gyűrűvilágítók 4 LED sötét látóterű (árnyék) megvilágítók 5 LED mátrix reflektor megvilágítók 6 HEAD LUXEON LED vezérelhető reflektorok 7 LUXEON LED 1W-os, 3W-os, 5W-os
Koordináta-geometria alapozó feladatok
 Koordináta-geometria alapozó feladatok 1. Határozd meg az AB szakasz felezőpontját! (1,5 ; 3,5) (0,5 ; ) (6,5 ; 8,5) (4,5 ; ) (0,5 ; 1,5) (0 ; 0) (0 ; 8,5) (1 ; 1) ( 1,5 ; ) (3,5 ; 3) (0 ; 3) ( 1 ; 1,5).
Koordináta-geometria alapozó feladatok 1. Határozd meg az AB szakasz felezőpontját! (1,5 ; 3,5) (0,5 ; ) (6,5 ; 8,5) (4,5 ; ) (0,5 ; 1,5) (0 ; 0) (0 ; 8,5) (1 ; 1) ( 1,5 ; ) (3,5 ; 3) (0 ; 3) ( 1 ; 1,5).
Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel. Az objektumok áthaladnak a többi objektumon
 Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Koordinátageometriai gyakorló feladatok I ( vektorok )
") Koordinátageometriai gyakorló feladatok I ( vektorok./ Határozd meg az AB szakasznak azt a pontját, amely a szakaszt : ha A ( ; és a B ( ; 8!./ Adott az A ( 3 ; 5 és a ( ; 6 B pont. Számítsd ki az AB vektor
Koordinátageometriai gyakorló feladatok I ( vektorok./ Határozd meg az AB szakasznak azt a pontját, amely a szakaszt : ha A ( ; és a B ( ; 8!./ Adott az A ( 3 ; 5 és a ( ; 6 B pont. Számítsd ki az AB vektor
Jegyzetelési segédlet 7.
 Jegyzetelési segédlet 7. Informatikai rendszerelemek tárgyhoz 2009 Szerkesztett változat Géczy László Projektor az igazi multimédiás (periféria) eszköz Projektor és kapcsolatai Monitor Számítógép HIFI
Jegyzetelési segédlet 7. Informatikai rendszerelemek tárgyhoz 2009 Szerkesztett változat Géczy László Projektor az igazi multimédiás (periféria) eszköz Projektor és kapcsolatai Monitor Számítógép HIFI
Koordináta-geometria feladatgyűjtemény (A feladatok megoldásai a dokumentum végén találhatók)
") Koordináta-geometria feladatgyűjtemény (A feladatok megoldásai a dokumentum végén találhatók) Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két
Koordináta-geometria feladatgyűjtemény (A feladatok megoldásai a dokumentum végén találhatók) Vektorok 1. Egy négyzet két szemközti csúcsának koordinátái: A( ; 7) és C(4 ; 1). Határozd meg a másik két
Koordináta-geometria feladatok (középszint)
") Koordináta-geometria feladatok (középszint) 1. (KSZÉV Minta (1) 2004.05/I/4) Adott az A(2; 5) és B(1; 3) pont. Adja meg az AB szakasz felezőpontjának koordinátáit! 2. (KSZÉV Minta (2) 2004.05/I/7) Egy
Koordináta-geometria feladatok (középszint) 1. (KSZÉV Minta (1) 2004.05/I/4) Adott az A(2; 5) és B(1; 3) pont. Adja meg az AB szakasz felezőpontjának koordinátáit! 2. (KSZÉV Minta (2) 2004.05/I/7) Egy
Képszerkesztés elméleti feladatainak kérdései és válaszai
 Képszerkesztés elméleti feladatainak kérdései és válaszai 1. A... egyedi alkotóelemek, amelyek együttesen formálnak egy képet. Helyettesítse be a pixelek paletták grafikák gammák Helyes válasz: pixelek
Képszerkesztés elméleti feladatainak kérdései és válaszai 1. A... egyedi alkotóelemek, amelyek együttesen formálnak egy képet. Helyettesítse be a pixelek paletták grafikák gammák Helyes válasz: pixelek
Géprajz - gépelemek. AXO OMETRIKUS ábrázolás
 Géprajz - gépelemek AXO OMETRIKUS ábrázolás Előadó: Németh Szabolcs mérnöktanár Belső használatú jegyzet http://gepesz-learning.shp.hu 1 Egyszerű testek látszati képe Ábrázolási módok: 1. Vetületi 2. Perspektivikus
Géprajz - gépelemek AXO OMETRIKUS ábrázolás Előadó: Németh Szabolcs mérnöktanár Belső használatú jegyzet http://gepesz-learning.shp.hu 1 Egyszerű testek látszati képe Ábrázolási módok: 1. Vetületi 2. Perspektivikus
1. ábra Egy terület DTM-je (balra) és ugyanazon terület DSM-je (jobbra)
 és ugyanazon terület DSM-je (jobbra)") Bevezetés A digitális terepmodell (DTM) a Föld felszínének digitális, 3D-ós reprezentációja. Az automatikus DTM előállítás folyamata jelenti egyrészt távérzékelt felvételekből a magassági adatok kinyerését,
Bevezetés A digitális terepmodell (DTM) a Föld felszínének digitális, 3D-ós reprezentációja. Az automatikus DTM előállítás folyamata jelenti egyrészt távérzékelt felvételekből a magassági adatok kinyerését,
Képszerkesztés elméleti kérdések
 Képszerkesztés elméleti kérdések 1. A... egyedi alkotó elemek, amelyek együttesen formálnak egy képet.(pixelek) a. Pixelek b. Paletták c. Grafikák d. Gammák 2. Az alábbiak közül melyik nem színmodell?
Képszerkesztés elméleti kérdések 1. A... egyedi alkotó elemek, amelyek együttesen formálnak egy képet.(pixelek) a. Pixelek b. Paletták c. Grafikák d. Gammák 2. Az alábbiak közül melyik nem színmodell?
Előszó. International Young Physicists' Tournament (IYPT) Karcolt hologram #5 IYPT felirat karcolása D'Intino Eugenio
 Karcolt hologram #5 IYPT felirat karcolása D'Intino Eugenio") Előszó International Young Physicists' Tournament (IYPT) Karcolt hologram #5 IYPT felirat karcolása Karcolt hologramok Hologram: A hullámfrontok rekonstrukciójával létrehozott és megörökítő lemezen rögzített
Előszó International Young Physicists' Tournament (IYPT) Karcolt hologram #5 IYPT felirat karcolása Karcolt hologramok Hologram: A hullámfrontok rekonstrukciójával létrehozott és megörökítő lemezen rögzített
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
MOBIL TÉRKÉPEZŐ RENDSZER PROJEKT TAPASZTALATOK
 MOBIL TÉRKÉPEZŐ RENDSZER PROJEKT TAPASZTALATOK GISopen 2011 2011. március 16-18. Konasoft Project Tanácsadó Kft. Maros Olivér - projektvezető MIÉRT MOBIL TÉRKÉPEZÉS? A mobil térképezés egyetlen rendszerben
MOBIL TÉRKÉPEZŐ RENDSZER PROJEKT TAPASZTALATOK GISopen 2011 2011. március 16-18. Konasoft Project Tanácsadó Kft. Maros Olivér - projektvezető MIÉRT MOBIL TÉRKÉPEZÉS? A mobil térképezés egyetlen rendszerben
A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők?
 A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők? Vagyis mely képjellemzőket érdemes a vetületképekből kihámozni? Az attól függ Térbeli viszonyok egyenes méret párh. / szög alak síkok helyzete
A 3D-2D leképezés alatt melyek maradnak robusztus képjellemzők? Vagyis mely képjellemzőket érdemes a vetületképekből kihámozni? Az attól függ Térbeli viszonyok egyenes méret párh. / szög alak síkok helyzete
Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu
 Gyártórendszerek mechatronikája Termelési folyamatok II. 07 3D szkennelés Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu miko.balazs@bgk.uni-obuda.hu 1 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai
Gyártórendszerek mechatronikája Termelési folyamatok II. 07 3D szkennelés Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu miko.balazs@bgk.uni-obuda.hu 1 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai
2. ELŐADÁS. Transzformációk Egyszerű alakzatok
 2. ELŐADÁS Transzformációk Egyszerű alakzatok Eltolás A tér bármely P és P pontpárjához pontosan egy olyan eltolás létezik, amely P-t P -be viszi. Bármely eltolás tetszőleges egyenest vele párhuzamos egyenesbe
2. ELŐADÁS Transzformációk Egyszerű alakzatok Eltolás A tér bármely P és P pontpárjához pontosan egy olyan eltolás létezik, amely P-t P -be viszi. Bármely eltolás tetszőleges egyenest vele párhuzamos egyenesbe
Érettségi feladatok Koordinátageometria_rendszerezve / 5
 Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
Érettségi feladatok Koordinátageometria_rendszerezve 2005-2013 1/ 5 Vektorok 2005. május 28./12. Adottak az a (4; 3) és b ( 2; 1) vektorok. a) Adja meg az a hosszát! b) Számítsa ki az a + b koordinátáit!
A SatAlarm AVA alkalmazás használata
 A SatAlarm AVA alkalmazás használata A SatAlarm alkalmazása célja, hogy lehetővé tegye az iqalarm rendszerek központi egységeinek mobil telefonról történő távoli elérését és vezérlését. A riasztórendszer
A SatAlarm AVA alkalmazás használata A SatAlarm alkalmazása célja, hogy lehetővé tegye az iqalarm rendszerek központi egységeinek mobil telefonról történő távoli elérését és vezérlését. A riasztórendszer
Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás
 leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás") Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Videóanalitikát mindenhova! Princz Adorján Miről lesz szó? Videó tartalom elemzés (VCA) leegyszerűsített működése Kültéri védelem Közúthálózat megfigyelés Emberszámlálás VCA alapú detektorok Videótartalom
Skaláris szorzat: a b cos, ahol α a két vektor által bezárt szög.
 1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
1 Összeadás: Legyen a (7; 3) és b (- 2; 4), akkor az összegük a + b (7 + (-2); 3 + 4) = (5; 7) Kivonás: Legyen a (7; 3) és b (- 2; 4), akkor a különbségük a b (7 - (-2); 3-4)=(9; - 1) Valós számmal való
Irodából a terepre: a mobil informatika (alkalmazás bemutató)
") Irodából a terepre: a mobil informatika (alkalmazás bemutató) Készítette: Dátum: Fűr Attila 2014.10.30. Bevezetés A mobilitás szerepe átértékelődik Gazdasági környezet változik: Válság, megszorítások kevesebb
Irodából a terepre: a mobil informatika (alkalmazás bemutató) Készítette: Dátum: Fűr Attila 2014.10.30. Bevezetés A mobilitás szerepe átértékelődik Gazdasági környezet változik: Válság, megszorítások kevesebb
CabMap hálózat-dokumentáló rendszer
 CabMap hálózat-dokumentáló rendszer A CabMap hálózat-dokumentáló rendszer elsősorban passzív optikai hálózatok elektronikus dokumentálására szolgál. A rendszer hatékony és rugalmas hozzáférést biztosít
CabMap hálózat-dokumentáló rendszer A CabMap hálózat-dokumentáló rendszer elsősorban passzív optikai hálózatok elektronikus dokumentálására szolgál. A rendszer hatékony és rugalmas hozzáférést biztosít
Bevezetés. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Bevezetés Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Digitális képfeldolgozás digitális képfeldolgozás számítógépes grafika digitális
Tanmenetjavaslat. Téma Óraszám Tananyag Fogalmak Összefüggések Eszközök Kitekintés. Helyi érték, alaki érték. Számegyenes.
 Heti 4 óra esetén, 37 tanítási hétre összesen 148 óra áll rendelkezésre. A tanmenet 132 óra beosztását tartalmazza. Heti 5 óra esetén összesen 37-tel több órában dolgozhatunk. Ez összesen 185 óra. Itt
Heti 4 óra esetén, 37 tanítási hétre összesen 148 óra áll rendelkezésre. A tanmenet 132 óra beosztását tartalmazza. Heti 5 óra esetén összesen 37-tel több órában dolgozhatunk. Ez összesen 185 óra. Itt
Pontfelhő létrehozás és használat Regard3D és CloudCompare nyílt forráskódú szoftverekkel. dr. Siki Zoltán
 Pontfelhő létrehozás és használat Regard3D és CloudCompare nyílt forráskódú szoftverekkel dr. Siki Zoltán siki.zoltan@epito.bme.hu Regard3D Nyílt forráskódú SfM (Structure from Motion) Fényképekből 3D
Pontfelhő létrehozás és használat Regard3D és CloudCompare nyílt forráskódú szoftverekkel dr. Siki Zoltán siki.zoltan@epito.bme.hu Regard3D Nyílt forráskódú SfM (Structure from Motion) Fényképekből 3D
CARE. Biztonságos. otthonok idős embereknek CARE. Biztonságos otthonok idős embereknek 2010-09-02. Dr. Vajda Ferenc Egyetemi docens
 CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
CARE Biztonságos CARE Biztonságos otthonok idős embereknek otthonok idős embereknek 2010-09-02 Dr. Vajda Ferenc Egyetemi docens 3D Érzékelés és Mobilrobotika kutatócsoport Budapesti Műszaki és Gazdaságtudományi
Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 2007/2008. tavaszi félév
 Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 007/008. tavaszi félév Józsa Csongor Konzulens: Dr. Vajda Ferenc 1/1 1. A probléma ismertetése Mobilis robotok ismeretlen
Sztereó képfeldolgozás mobilrobot platform tájékozódásához Önálló laboratórium 007/008. tavaszi félév Józsa Csongor Konzulens: Dr. Vajda Ferenc 1/1 1. A probléma ismertetése Mobilis robotok ismeretlen
Az egyenes és a sík analitikus geometriája
 Az egyenes és a sík analitikus geometriája Az egyenes a kétdimenziós koordinátarendszerben A kétdimenziós koordinátarendszerben az egyenest egy n(a, B) normálvektorával és egy r 0 helyvektorú P(x 0,y 0
Az egyenes és a sík analitikus geometriája Az egyenes a kétdimenziós koordinátarendszerben A kétdimenziós koordinátarendszerben az egyenest egy n(a, B) normálvektorával és egy r 0 helyvektorú P(x 0,y 0
CÉLKOORDINÁTOROK alkalmazástechnikája CÉLKOORDINÁTOROK FELÉPÍTÉSI ELVE
 Géczi József Dr. Szabó László CÉLKOORDINÁTOROK alkalmazástechnikája A rádiótechnikai célkoordinátorok (RCK) feladata azon szögkoordináták mérése, amelyek a távolságvektor koordinátor hossztengelyéhez viszonyított
Géczi József Dr. Szabó László CÉLKOORDINÁTOROK alkalmazástechnikája A rádiótechnikai célkoordinátorok (RCK) feladata azon szögkoordináták mérése, amelyek a távolságvektor koordinátor hossztengelyéhez viszonyított
Mozgásvizsgálatok. Mérnökgeodézia II. Ágfalvi Mihály - Tóth Zoltán
 Mérnökgeodézia II. Ágfalvi Mihály - Tóth Zoltán Célja: Várható elmozdulások előrejelzése (erőhatások alatt, Siógemenci árvízkapu) Már bekövetkezett mozgások okainak vizsgálata (Pl. kulcsi löszpart) Laboratóriumi
Mérnökgeodézia II. Ágfalvi Mihály - Tóth Zoltán Célja: Várható elmozdulások előrejelzése (erőhatások alatt, Siógemenci árvízkapu) Már bekövetkezett mozgások okainak vizsgálata (Pl. kulcsi löszpart) Laboratóriumi
Érettségi feladatok: Koordináta-geometria 1/5
 Érettségi feladatok: Koordináta-geometria 1/5 2003. Próba/ 13. Adott egy háromszög három csúcspontja a koordinátáival: A( 4; 4), B(4; 4) és C( 4; 8). Számítsa ki a C csúcsból induló súlyvonal és az A csúcsból
Érettségi feladatok: Koordináta-geometria 1/5 2003. Próba/ 13. Adott egy háromszög három csúcspontja a koordinátáival: A( 4; 4), B(4; 4) és C( 4; 8). Számítsa ki a C csúcsból induló súlyvonal és az A csúcsból
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK EMELT SZINT Koordinátageometria
 1) MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK EMELT SZINT Koordinátageometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett feladatrészek
1) MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK EMELT SZINT Koordinátageometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett feladatrészek
Koordinátageometria. , azaz ( ) a B halmazt pontosan azok a pontok alkotják, amelynek koordinátáira:
 a B halmazt pontosan azok a pontok alkotják, amelynek koordinátáira:") 005-0XX Emelt szint Koordinátageometria 1) a) Egy derékszögű háromszög egyik oldalegyenese valamelyik koordinátatengely, egy másik oldalegyenesének egyenlete x + y = 10, egyik csúcsa az origó. Hány ilyen
005-0XX Emelt szint Koordinátageometria 1) a) Egy derékszögű háromszög egyik oldalegyenese valamelyik koordinátatengely, egy másik oldalegyenesének egyenlete x + y = 10, egyik csúcsa az origó. Hány ilyen
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT Koordináta-geometria
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT Koordináta-geometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT Koordináta-geometria A szürkített hátterű feladatrészek nem tartoznak az érintett témakörhöz, azonban szolgálhatnak fontos információval az érintett
A távérzékelés és fizikai alapjai 4. Technikai alapok
 A távérzékelés és fizikai alapjai 4. Technikai alapok Csornai Gábor László István Budapest Főváros Kormányhivatala Mezőgazdasági Távérzékelési és Helyszíni Ellenőrzési Osztály Az előadás 2011-es átdolgozott
A távérzékelés és fizikai alapjai 4. Technikai alapok Csornai Gábor László István Budapest Főváros Kormányhivatala Mezőgazdasági Távérzékelési és Helyszíni Ellenőrzési Osztály Az előadás 2011-es átdolgozott
I. Vektorok. Adott A (2; 5) és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:
 és B ( - 3; 4) pontok. (ld. ábra) A két pont által meghatározott vektor:") I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
I. Vektorok 1. Vektorok összege Általánosan: Az ábra alapján Adott: a(4; 1) és b(; 3) a + b (4 + ; 1 + 3) = (6; ) a(a 1 ; a ) és b(b 1 ; b ) a + b(a 1 + b 1 ; a + b ). Vektorok különbsége Általánosan:
Brósch Zoltán (Debreceni Egyetem Kossuth Lajos Gyakorló Gimnáziuma) Geometria III.
 Geometria III.") Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Geometria III. DEFINÍCIÓ: (Vektor) Az egyenlő hosszúságú és egyirányú irányított szakaszoknak a halmazát vektornak nevezzük. Jele: v. DEFINÍCIÓ: (Geometriai transzformáció) Geometriai transzformációnak
Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D
 Vetítések Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D Vetítések fajtái - 1 perspektívikus A párhuzamos A A' B A' B A vetítés középpontja B' Vetítési
Vetítések Transzformációk, amelyek n-dimenziós objektumokat kisebb dimenziós terekbe visznek át. Pl. 3D 2D Vetítések fajtái - 1 perspektívikus A párhuzamos A A' B A' B A vetítés középpontja B' Vetítési
 Távérzékelés Analóg felvételek feldolgozása (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Távérzékelés Analóg felvételek feldolgozása (EENAFOTOTV, ETNATAVERV) Erdőmérnöki szak, Környezettudós szak Király Géza NyME, Erdőmérnöki Kar Geomatikai, Erdőfeltárási és Vízgazdálkodási Intézet Földmérési
Intelligens Rendszerek
 Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Intelligens Rendszerek Robotok http://mobil.nik.uni-obuda.hu http://mobil.nik.uni-obuda.hu/tantargyak/irg/segedanyagok/ B Biology Biológiai mintára készített, E Electronics elektronikusan működtetett,
Térbeli transzformációk, a tér leképezése síkra
 Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Térbeli transzformációk, a tér leképezése síkra Homogén koordináták bevezetése térben A tér minden P pontjához kölcsönösen egyértelműen egy valós (x, y, z) számhármast rendeltünk hozzá. (Descartes-féle
Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága
 Földrajzi koordináták Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága Topo-Karto-2 1 Földrajzi koordináták pólus egyenlítő
Földrajzi koordináták Egy pont földfelszíni helyzetét meghatározzák: a pont alapfelületi földrajzi koordinátái a pont tengerszint feletti magassága Topo-Karto-2 1 Földrajzi koordináták pólus egyenlítő
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás ek - 2019. április 2. http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME,
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás ek - 2019. április 2. http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr. Salvi Péter BME,
Összeállította Horváth László egyetemi tanár
 Óbudai Egyetem Neumann János Informatikai Kar Intelligens Mérnöki Rendszerek Intézet Intelligens Mérnöki Rendszerek Szakirány a Mérnök informatikus alapszakon Összeállította Horváth László Budapest, 2011
Óbudai Egyetem Neumann János Informatikai Kar Intelligens Mérnöki Rendszerek Intézet Intelligens Mérnöki Rendszerek Szakirány a Mérnök informatikus alapszakon Összeállította Horváth László Budapest, 2011
Számítógépes Grafika mintafeladatok
 Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
Számítógépes Grafika mintafeladatok Feladat: Forgassunk a 3D-s pontokat 45 fokkal a X tengely körül, majd nyújtsuk az eredményt minden koordinátájában kétszeresére az origóhoz képest, utána forgassunk
MATEMATIKA HETI 5 ÓRA
 EURÓPAI ÉRETTSÉGI 2008 MATEMATIKA HETI 5 ÓRA IDŐPONT : 2008. június 5 (reggel) A VIZSGA IDŐTARTAMA: 4 óra (240 perc) MEGENGEDETT ESZKÖZÖK: Európai képletgyűjtemény Nem programozható, nem grafikus számológép
EURÓPAI ÉRETTSÉGI 2008 MATEMATIKA HETI 5 ÓRA IDŐPONT : 2008. június 5 (reggel) A VIZSGA IDŐTARTAMA: 4 óra (240 perc) MEGENGEDETT ESZKÖZÖK: Európai képletgyűjtemény Nem programozható, nem grafikus számológép
A geometriai optika. Fizika május 25. Rezgések és hullámok. Fizika 11. (Rezgések és hullámok) A geometriai optika május 25.
 A geometriai optika május 25.") A geometriai optika Fizika 11. Rezgések és hullámok 2019. május 25. Fizika 11. (Rezgések és hullámok) A geometriai optika 2019. május 25. 1 / 22 Tartalomjegyzék 1 A fénysebesség meghatározása Olaf Römer
A geometriai optika Fizika 11. Rezgések és hullámok 2019. május 25. Fizika 11. (Rezgések és hullámok) A geometriai optika 2019. május 25. 1 / 22 Tartalomjegyzék 1 A fénysebesség meghatározása Olaf Römer
OPTIKA. Geometriai optika. Snellius Descartes-törvény. www.baranyi.hu 2010. szeptember 19. FIZIKA TÁVOKTATÁS
 OPTIKA Geometriai optika Snellius Descartes-törvény A fényhullám a geometriai optika szempontjából párhuzamos fénysugarakból áll. A vákuumban haladó fénysugár a geometriai egyenes fizikai megfelelője.
OPTIKA Geometriai optika Snellius Descartes-törvény A fényhullám a geometriai optika szempontjából párhuzamos fénysugarakból áll. A vákuumban haladó fénysugár a geometriai egyenes fizikai megfelelője.
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás
 3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás Önálló projektek - 2017. április 7. http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
3D - geometriai modellezés, alakzatrekonstrukció, nyomtatás Önálló projektek - 2017. április 7. http://cg.iit.bme.hu/portal/node/312 https://www.vik.bme.hu/kepzes/targyak/viiima01 Dr. Várady Tamás, Dr.
Koordináta geometria III.
 Koordináta geometria III. TÉTEL: A P (x; y) pont akkor és csak akkor illeszkedik a K (u; v) középpontú r sugarú körre (körvonalra), ha (x u) 2 + (y v) 2 = r 2. Ez az összefüggés a K (u; v) középpontú r
Koordináta geometria III. TÉTEL: A P (x; y) pont akkor és csak akkor illeszkedik a K (u; v) középpontú r sugarú körre (körvonalra), ha (x u) 2 + (y v) 2 = r 2. Ez az összefüggés a K (u; v) középpontú r
Informatikai eszközök fizikai alapjai Lovász Béla
 Informatikai eszközök fizikai alapjai Lovász Béla Kódolás Moduláció Morzekód Mágneses tárolás merevlemezeken Modulációs eljárások típusai Kódolás A kód megállapodás szerinti jelek vagy szimbólumok rendszere,
Informatikai eszközök fizikai alapjai Lovász Béla Kódolás Moduláció Morzekód Mágneses tárolás merevlemezeken Modulációs eljárások típusai Kódolás A kód megállapodás szerinti jelek vagy szimbólumok rendszere,
Alter Róbert Báró Csaba Sensor Technologies Kft
 Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Közúti forgalomelemzés kamerával e_traffic Alter Róbert Báró Csaba Sensor Technologies Kft Előadás témái Cégbemutató Videó analitikai eljárások Forgalomszámláló eszközök összehasonlítása e_traffic forgalomelemző
Transzformációk. Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform
 Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Transzformációk Grafikus játékok fejlesztése Szécsi László 2013.02.26. t05-transform Koordinátarendszerek: modelltér Koordinátarendszerek: világtér Koordinátarendszerek: kameratér up right z eye ahead
Geometria 1 összefoglalás o konvex szögek
 Geometria 1 összefoglalás Alapfogalmak: a pont, az egyenes és a sík Axiómák: 1. Bármely 2 pontra illeszkedik egy és csak egy egyenes. 2. Három nem egy egyenesre eső pontra illeszkedik egy és csak egy sík.
Geometria 1 összefoglalás Alapfogalmak: a pont, az egyenes és a sík Axiómák: 1. Bármely 2 pontra illeszkedik egy és csak egy egyenes. 2. Három nem egy egyenesre eső pontra illeszkedik egy és csak egy sík.
Milyen simaságú legyen a minta felülete jó minőségű EBSD mérésekhez
 1 Milyen simaságú legyen a minta felülete jó minőségű EBSD mérésekhez Havancsák Károly Dankházi Zoltán Ratter Kitti Varga Gábor Visegrád 2012. január Elektron diffrakció 2 Diffrakció - kinematikus elmélet
1 Milyen simaságú legyen a minta felülete jó minőségű EBSD mérésekhez Havancsák Károly Dankházi Zoltán Ratter Kitti Varga Gábor Visegrád 2012. január Elektron diffrakció 2 Diffrakció - kinematikus elmélet
Síkbeli egyenesek. 2. Egy egyenes az x = 1 4t, y = 2 + t parméteres egyenletekkel adott. Határozzuk meg
 Analitikus mértan 3. FELADATLAP Síkbeli egyenesek 1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az origón
Analitikus mértan 3. FELADATLAP Síkbeli egyenesek 1. Írjuk fel annak az egyenesnek a paraméteres egyenleteit, amely (i) áthalad az M 0 (1, 2) ponton és párhuzamos a a(3, 1) vektorral; (ii) áthalad az origón
SZE, Doktori Iskola. Számítógépes grafikai algoritmusok. Összeállította: Dr. Gáspár Csaba. Felületmegjelenítés
 Felületmegjelenítés Megjelenítés paramétervonalakkal Drótvázas megjelenítés Megjelenítés takarással Triviális hátsólap eldobás A z-puffer algoritmus Megvilágítás és árnyalás Megjelenítés paramétervonalakkal
Felületmegjelenítés Megjelenítés paramétervonalakkal Drótvázas megjelenítés Megjelenítés takarással Triviális hátsólap eldobás A z-puffer algoritmus Megvilágítás és árnyalás Megjelenítés paramétervonalakkal
VEKTOROK. 1. B Legyen a( 3; 2; 4), b( 2; 1; 2), c(3; 4; 5), d(8; 5; 7). (a) 2a 4c + 6d [(30; 10; 30)]
![VEKTOROK. 1. B Legyen a( 3; 2; 4), b( 2; 1; 2), c(3; 4; 5), d(8; 5; 7). (a) 2a 4c + 6d [(30; 10; 30)]](/thumbs/88/117769211.jpg "VEKTOROK. 1. B Legyen a( 3; 2; 4), b( 2; 1; 2), c(3; 4; 5), d(8; 5; 7). (a) 2a 4c + 6d [(30; 10; 30)]") Bodó Beáta 1 VEKTOROK 1. B Legyen a( ; 2; 4), b( 2; 1; 2), c(; 4; 5), d(8; 5; 7). (a) 2a 4c + 6d [(0; 10; 0)] (b) c + b 7a [(18; 15; 29)] (c) 2d c + b [ (5; ; ) = 6, 56] (d) 4a + 8b 7c [ ( 49; 44; 5) =
Bodó Beáta 1 VEKTOROK 1. B Legyen a( ; 2; 4), b( 2; 1; 2), c(; 4; 5), d(8; 5; 7). (a) 2a 4c + 6d [(0; 10; 0)] (b) c + b 7a [(18; 15; 29)] (c) 2d c + b [ (5; ; ) = 6, 56] (d) 4a + 8b 7c [ ( 49; 44; 5) =
Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések
 www.geodezia.hu Geodézia Zrt. 31. Vándorgyűlés Szekszárd, 2017. július 6-8. Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések Csörgits Péter Miről lesz szó? VONALAS
www.geodezia.hu Geodézia Zrt. 31. Vándorgyűlés Szekszárd, 2017. július 6-8. Vonalas közlekedési létesítmények mobil térképezésével kapcsolatos saját fejlesztések Csörgits Péter Miről lesz szó? VONALAS
PTE PMMF Közmű- Geodéziai Tanszék
 digitális állományok átvétele, meglévő térképek digitalizálása, meglévő térképek, légifelvételek, illetve speciális műszaki rajzi dokumentációk szkennelése és transzformálása. A leggyorsabb, legolcsóbb
digitális állományok átvétele, meglévő térképek digitalizálása, meglévő térképek, légifelvételek, illetve speciális műszaki rajzi dokumentációk szkennelése és transzformálása. A leggyorsabb, legolcsóbb
Kulcsár Attila. A második szint GeoCalc GIS 2. GISopen 2012 konfrencia. www.geocalc.hu
 Kulcsár Attila A második szint GISopen 2012 konfrencia 1 GeoCalc GIS története 2006 Alapverzió (csak adatbázisokkal együtt Temető nyilvántartás) 2008 GeoCalc GIS 1.0 2011 GeoCalc GIS 1.5 (hierarchia, földtömegszámítás,
Kulcsár Attila A második szint GISopen 2012 konfrencia 1 GeoCalc GIS története 2006 Alapverzió (csak adatbázisokkal együtt Temető nyilvántartás) 2008 GeoCalc GIS 1.0 2011 GeoCalc GIS 1.5 (hierarchia, földtömegszámítás,
Koordináta-geometria. Fogalom. Jelölés. Tulajdonságok, definíciók
 Koordináta-geometria Fogalom Ezen a helyen találkozik össze a számtan és a mértan. Körök, egyenesek, háromszögek és más egyéb alakzatok, de nem szerkesztenünk kell, vagy méricskélni, hanem számolni, viszont
Koordináta-geometria Fogalom Ezen a helyen találkozik össze a számtan és a mértan. Körök, egyenesek, háromszögek és más egyéb alakzatok, de nem szerkesztenünk kell, vagy méricskélni, hanem számolni, viszont
= Y y 0. = Z z 0. u 1. = Z z 1 z 2 z 1. = Y y 1 y 2 y 1
 Egyenes és sík a térben Elméleti áttekintés Az egyenes paraméteres egyenlete: X = u 1 λ + x 0 Y = u λ + y 0, Z = u λ + z 0 ahol a λ egy valós paraméter Az u = (u 1, u, u ) az egyenes irányvektora és P
Egyenes és sík a térben Elméleti áttekintés Az egyenes paraméteres egyenlete: X = u 1 λ + x 0 Y = u λ + y 0, Z = u λ + z 0 ahol a λ egy valós paraméter Az u = (u 1, u, u ) az egyenes irányvektora és P
2014/2015. tavaszi félév
 Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Hajder L. és Valasek G. hajder.levente@sztaki.mta.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2014/2015. tavaszi félév Tartalom Geometria modellezés 1 Geometria modellezés 2 Geometria modellezés
Ferde kúp ellipszis metszete
 Ferde kúp ellipszis metszete A ferde kúp az első képsíkon lévő vezérkörével és az M csúcsponttal van megadva. Ha a kúpból ellipszist szeretnénk metszeni, akkor a metsző síknak minden alkotót végesben kell
Ferde kúp ellipszis metszete A ferde kúp az első képsíkon lévő vezérkörével és az M csúcsponttal van megadva. Ha a kúpból ellipszist szeretnénk metszeni, akkor a metsző síknak minden alkotót végesben kell
Elektronika Előadás. Modulátorok, demodulátorok, lock-in erősítők
 Elektronika 2 10. Előadás Modulátorok, demodulátorok, lock-in erősítők Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
Elektronika 2 10. Előadás Modulátorok, demodulátorok, lock-in erősítők Irodalom - Megyeri János: Analóg elektronika, Tankönyvkiadó, 1990 - U. Tiecze, Ch. Schenk: Analóg és digitális áramkörök, Műszaki
A digitális képfeldolgozás alapjai
 A digitális képfeldolgozás alapjai Digitális képfeldolgozás A digit szó jelentése szám. A digitális jelentése, számszerű. A digitális információ számokká alakított információt jelent. A számítógép a képi
A digitális képfeldolgozás alapjai Digitális képfeldolgozás A digit szó jelentése szám. A digitális jelentése, számszerű. A digitális információ számokká alakított információt jelent. A számítógép a képi
11. Egy Y alakú gumikötél egyik ága 20 cm, másik ága 50 cm. A két ág végeit azonos, f = 4 Hz
 Hullámok tesztek 1. Melyik állítás nem igaz a mechanikai hullámok körében? a) Transzverzális hullám esetén a részecskék rezgésének iránya merőleges a hullámterjedés irányára. b) Csak a transzverzális hullám
Hullámok tesztek 1. Melyik állítás nem igaz a mechanikai hullámok körében? a) Transzverzális hullám esetén a részecskék rezgésének iránya merőleges a hullámterjedés irányára. b) Csak a transzverzális hullám
i5000 sorozatú szkennerek
 i5000 sorozatú szkennerek Vezérlő kód információk _hu Vezérlőkód információk Tartalomjegyzék Vezérlő minta részletek... 4 Vezérlő minta tájolás... 5 Vonalkód részletek... 7 Vezérlő pozícionálása... 9 Papír
i5000 sorozatú szkennerek Vezérlő kód információk _hu Vezérlőkód információk Tartalomjegyzék Vezérlő minta részletek... 4 Vezérlő minta tájolás... 5 Vonalkód részletek... 7 Vezérlő pozícionálása... 9 Papír
Hajder Levente 2017/2018. II. félév
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 A fény elektromágneses hullám Az anyagokat olyan színűnek látjuk, amilyen színű fényt visszavernek
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév Tartalom 1 A fény elektromágneses hullám Az anyagokat olyan színűnek látjuk, amilyen színű fényt visszavernek
Tartalom. Tartalom. Anyagok Fényforrás modellek. Hajder Levente Fényvisszaverési modellek. Színmodellek. 2017/2018. II.
 Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév 1 A fény elektromágneses hullám Az anyagokat olyan színűnek látjuk, amilyen színű fényt visszavernek
Hajder Levente hajder@inf.elte.hu Eötvös Loránd Tudományegyetem Informatikai Kar 2017/2018. II. félév 1 A fény elektromágneses hullám Az anyagokat olyan színűnek látjuk, amilyen színű fényt visszavernek
OPTIKA. Vékony lencsék képalkotása. Dr. Seres István
 OPTIKA Vékony lencsék képalkotása Dr. Seres István Vékonylencse fókusztávolsága D 1 f (n 1) 1 R 1 1 R 2 Ha f > 0, gyűjtőlencse R > 0, ha domború felület R < 0, ha homorú felület n a relatív törésmutató
OPTIKA Vékony lencsék képalkotása Dr. Seres István Vékonylencse fókusztávolsága D 1 f (n 1) 1 R 1 1 R 2 Ha f > 0, gyűjtőlencse R > 0, ha domború felület R < 0, ha homorú felület n a relatív törésmutató
MATEMATIKA HETI 5 ÓRA. IDŐPONT: 2010. Június 4.
 EURÓPAI ÉRETTSÉGI 2010 MATEMATIKA HETI 5 ÓRA IDŐPONT: 2010. Június 4. A VIZSGA IDŐTARTAMA: 4 óra (240 perc) ENGEDÉLYEZETT SEGÉDESZKÖZÖK : Európai képletgyűjtemény Nem programozható, nem grafikus kalkulátor
EURÓPAI ÉRETTSÉGI 2010 MATEMATIKA HETI 5 ÓRA IDŐPONT: 2010. Június 4. A VIZSGA IDŐTARTAMA: 4 óra (240 perc) ENGEDÉLYEZETT SEGÉDESZKÖZÖK : Európai képletgyűjtemény Nem programozható, nem grafikus kalkulátor
2016/2017. Matematika 9.Kny
 2016/2017. Matematika 9.Kny Gondolkodási módszerek 1. Számhalmazok: N, Z, Q, Q*, R a számhalmazok kapcsolata, halmazábra 2. Ponthalmazok: o 5. oldal K I. fejezet: 172-178., 180-185., 191. feladat távolsággal
2016/2017. Matematika 9.Kny Gondolkodási módszerek 1. Számhalmazok: N, Z, Q, Q*, R a számhalmazok kapcsolata, halmazábra 2. Ponthalmazok: o 5. oldal K I. fejezet: 172-178., 180-185., 191. feladat távolsággal
Vízszintes kitűzések. 1-3. gyakorlat: Vízszintes kitűzések
 Vízszintes kitűzések A vízszintes kitűzések végrehajtása során általában nem találkozunk bonyolult számítási feladatokkal. A kitűzési munka nehézségeit elsősorban a kedvezőtlen munkakörülmények okozzák,
Vízszintes kitűzések A vízszintes kitűzések végrehajtása során általában nem találkozunk bonyolult számítási feladatokkal. A kitűzési munka nehézségeit elsősorban a kedvezőtlen munkakörülmények okozzák,
Távérzékelés, a jöv ígéretes eszköze
 Távérzékelés, a jöv ígéretes eszköze Ritvayné Szomolányi Mária Frombach Gabriella VITUKI CONSULT Zrt. A távérzékelés segítségével: különböz6 magasságból, tetsz6leges id6ben és a kívánt hullámhossz tartományokban
Távérzékelés, a jöv ígéretes eszköze Ritvayné Szomolányi Mária Frombach Gabriella VITUKI CONSULT Zrt. A távérzékelés segítségével: különböz6 magasságból, tetsz6leges id6ben és a kívánt hullámhossz tartományokban
2016/2017. Matematika 9.Kny
 2016/2017. Matematika 9.Kny Gondolkodási módszerek 1. Számhalmazok: N, Z, Q, Q*, R a számhalmazok kapcsolata, halmazábra 2. Ponthalmazok: o 4. oldal K I. fejezet: 172-178., 180-185., 191. feladat távolsággal
2016/2017. Matematika 9.Kny Gondolkodási módszerek 1. Számhalmazok: N, Z, Q, Q*, R a számhalmazok kapcsolata, halmazábra 2. Ponthalmazok: o 4. oldal K I. fejezet: 172-178., 180-185., 191. feladat távolsággal
3. Vertikális napóra szerkesztése (2009. September 11., Friday) - Szerzõ: Ponori Thewrewk Aurél
 - Szerzõ: Ponori Thewrewk Aurél") 3. Vertikális napóra szerkesztése (2009. September 11., Friday) - Szerzõ: Ponori Thewrewk Aurél A cikk két olyan eljárást mutat be, amely a függõleges napórák elkészítésében nyújt segítséget. A fal tájolásának
3. Vertikális napóra szerkesztése (2009. September 11., Friday) - Szerzõ: Ponori Thewrewk Aurél A cikk két olyan eljárást mutat be, amely a függõleges napórák elkészítésében nyújt segítséget. A fal tájolásának
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT. Koordináta-geometria
 MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT 1) Adott két pont: A 4; 1 felezőpontjának koordinátáit! AB felezőpontja legyen F. Koordináta-geometria és B 3 1; Írja fel az AB szakasz 1 3 4
MATEMATIKA ÉRETTSÉGI TÍPUSFELADATOK MEGOLDÁSAI KÖZÉP SZINT 1) Adott két pont: A 4; 1 felezőpontjának koordinátáit! AB felezőpontja legyen F. Koordináta-geometria és B 3 1; Írja fel az AB szakasz 1 3 4