VIZSGABIZTOS KÉPZÉS. 09_1. Futóművek Kerékfelfüggesztés, futómű paraméterek, konstrukciók. Kádár Lehel. Budapest,
|
|
|
- Marcell Kerekes
- 9 évvel ezelőtt
- Látták:
Átírás
1 VIZSGABIZTOS KÉPZÉS 09_1. Futóművek Kerékfelfüggesztés, futómű paraméterek, konstrukciók Kádár Lehel Budapest,

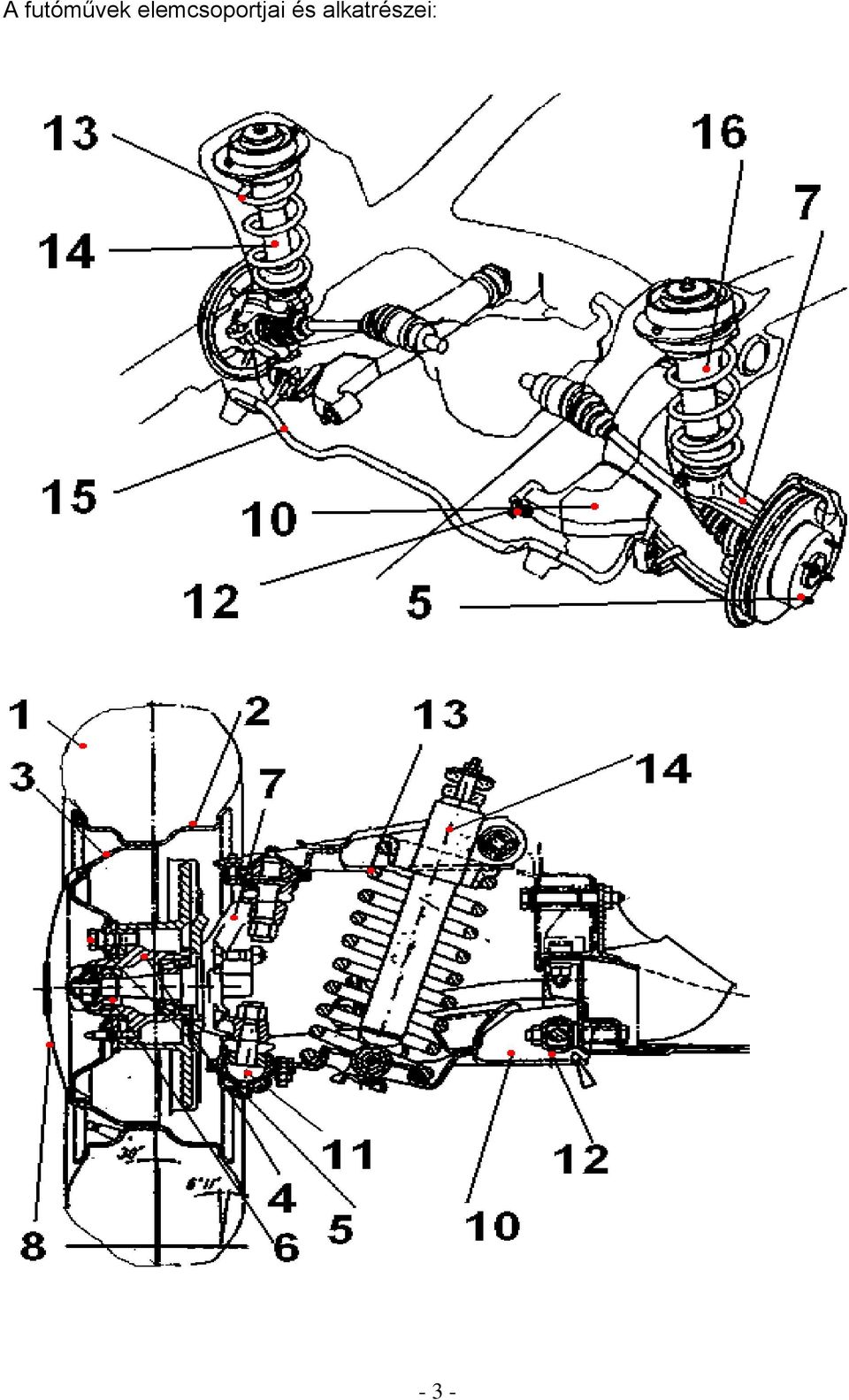
2 1) Futómű általános szerkezeti felépítése Futóművek elemcsoportjai és alkatrészei (jelölések az ábráknak megfelelően): Kerék: 1. gumiabroncs; 2. kerékpánt; 3. keréktárcsa; 4. kerékagy; 5. kerékcsavarok; 6. kerékcsapágyak; 7. tengely, tengelycsonk; 8. dísztárcsa. Kerékfelfüggesztés: 9. rudak; 10. lengőkarok; 11. csuklók; 12. gumiperselyek. Rugózás: 13. rugók; 14. lengéscsillapítók; 15. stabilizátorok; 16. mozgáshatároló rugalmas elemek


3 A futóművek elemcsoportjai és alkatrészei: - 3 -
4 2) Futóművek általános feladatai A futóműveknek az alábbi funkciókat, illetve feladatokat kell ellátni: Közvetíteni az erőhatásokat az út és a jármű között - kellő tapadási képességgel kell rendelkezni hossz - és keresztirányban - maximális dinamikus kerék - ill. tengelyterhelést kell szolgáltatni Megfelelő lengéskényelmet nyújtani az utasok, illetve az áruk számára - optimális önlengési jellemzőkkel kell rendelkezni - megfelelő lengésátviteli karakterisztikája legyen Csökkenteni a járműalkatrészek dinamikus igénybevételét Aktívan elősegíteni a jármű menetstabilitását - fékezéskor kedvezően befolyásolni a jármű irányítását - kanyarodáskor önkormányzással csökkenteni a jármű sodródását 2.1. Erőhatások az út és a jármű között: A jármű kerekeire menet közben különböző erők hatnak. Ilyenek: - a jármű tömegéből adódó súlyerő (G i ) - a járműre ható légellenállásból adódó függőleges leszorító vagy felhajtó erő (F WZ ) - a jármű lassításához, megállításához szükséges fékezőerő (F F ) - a jármű haladásához, gyorsulásához szükséges vonóerő (F) - a jármú kanyarodásakor fellépő oldalerő (F S ) Ezek az erők a gumiabroncs érintkezési felületén koncentrálódnak és a gumiabroncs és az útfelület közti tapadási viszonyoktól függően adódnak át az útra. Ha a tapadásból adódó erők nagyobbak a jelentkező aktív erőknél, akkor a jármű fékezhető, gyorsítható, kormányozható, vagyis a jármű menetstabilitása megfelelő

5 Ellenkező esetben a kerekek megcsúsznak, blokkolnak, kipörögnek, vagyis a jármű elveszti stabilitását. Tehát a gumiabroncs és az útfelület közti tapadási erők természetes korlátai a jármű dinamikus mozgásának. A tapadási erő meghatározható a kereket az útra szorító erő és a tapadási viszonyokat minősítő tényező ismeretében. F Z N φ x,y F y F x F x, y F, z x, y ahol: F z a kereket leszorító tényleges erő; F x a jármű menetirányába eső tapadási erő (itt hat F és F F ); F y a jármű oldalirányába eső tapadási erő (itt lép fel F s ); φ x a hosszirányú tapadási tényez; φ y a keresztirányú tapadási tényező; N a kerék talppontja
; F y a jármű")
6 2.2. A kerekeket leszorító erő A látszólag egyszerű egyenlet a jármű dinamikus mozgása során igen bonyolulttá válik. A kereket az út felületéhez szorító erő állandóan változik a rugózás, a felépítmény billegő, bólintó mozgása, a menet és az oldalszél következtében fellépő átterhelődések miatt: F zi = Z sti ± ΔZ R ± ΔZ W ± ΔZ 1 ±ΔZ 2 ±ΔZ 3 ± ΔZ 4, ahol F zi - az egy kerékre ható tényleges, dinamikus leszorító erő; Z sti - egy kerék statikus terhelése a jármű álló helyzetében; ΔZ R a kerék és a felépítmény rugózásaiból adódó kerékterhelés változás; ΔZ W a menet és oldalszél hatására fellépő kerékterhelés változás; ΔZ 1 a járműre ható oldalerő hatására bekövetkező kerékterhelés változás: Z 1 F y ΔZ 2 a felépítmény oldalbillenése következtében fellépő súlypont eltolódás (b) hatására fellépő kerékterhelés változás: (G k -felépítmény súlyereje) Z 2 G B k ΔZ 3 a fékezéskor vagy gyorsuláskor fellépő hosszirányú tehetetlenségi erő hatására bekövetkező kerékterhelés változás: B h b Z 3 F T ΔZ 4 a felépítmény bólintó mozgása következtében fellépő súlypont eltolódás (a) hatására jelentkező kerékterhelés változás: L h Z 4 G k L a - 6 -

7 Az átterhelődések következtében a kereket az útfelülethez szorító erő nulla és akár ötszörös értékek között változhat Tapadási tényező: A tapadási tényező a gumiabroncs és az útfelület közötti tapadás minőségét fejezi ki. Nagysága nulla és egy közötti értékek között változik. Így többek közt a gumiabroncs és az út közötti fajlagos csúszástól (slip), a gumiabroncs mintázatától, anyagától, légnyomásától, az útfelület érdességétől, hőmérsékletétől, szennyezettségétől, vizességétől függ. Járműdinamikai szempontból a slip alakulása alapvetően kihat a tapadási tényezőre. A slip a kerék és az útfelület közötti csúszás mértékére utal. Értelmezése: - fékezés esetén: S F V g k V V gk k - 7 -

8 - hajtás esetén: S H V k V V k g k ahol V gk a gépkocsi haladási sebessége, V k a kerék kerületi sebessége. A slip érték 0-1 között változik. Fékezéskor blokkolás esetén a kerék megáll, a jármű tovább halad, a slip értéke 1. Hajtáskor a kipörgő kerék esetén a slip értéke 1. A különböző blokkolás vagy kipörgésgátló rendszerek éppen ezt a fajlagos sebességkülönbséget ellenőrzik és szabályozzák. A korszerű járműdinamikai elméletek szerint a hosszirányú és a keresztirányú tapadási tényező eltérően változik a slip függvényében. A slip is tágabb értelmezést kap. Keresztirányú csúszás esetén is változik a hosszirányú tapadási tényező. Ezzel az elmélettel megmagyarázható a jármű fékezhetőségének és gyorsíthatóságának csökkenése, amennyiben a hibás futóműgeometria vagy túl nagy oldalerő miatt a jármű kereke oldalirányba megcsúszik

9 2.4. Lengéskényelem: A közúti járművek olyan úton haladnak, amelynek makroprofilja (függőleges vonalvezetése) és mikroprofilja (felületi egyenetlenségei) is véletlenszerű (sztochasztikus) függvény szerint változik. A futómű rugózási rendszerének kell gondoskodnia arról, hogy a mozgás közben az utasok és az áruk lengései megfelelő méretűek legyenek. Ennek egzakt minősítésére szolgálnak a különböző lengéskényelmi mutatók. Ezek közül a leggyakrabban használatosak: Önlengésszám: az álló és lengésbe kényszerített jármű percenkénti lengésszáma, melynek kedvező értéke 60 lengés/perc. Saját frekvencia: a másodpercenkénti lengésszám, melynek kedvező értéke: f 0 =0,75-1,45 Hz. A VDI számú ajánlás szerinti lengéskényelmi mutató: Ez a mutató már figyelembe veszi a lengés frekvenciája mellett a lengésgyorsulásokat és az emberi érzékenység különböző tartományait. A redukált mutató értéke 1-63 érték között változhat. A kényelmes érzet 1-20 értékek tartományába esik. ISO számú szabvány szerinti lengéskényelmi mutató: Ez a legkorszerűbb, legösszetettebb és a legpontosabb lengéskényelmi mutató. Kiszámításához országúti lengésvizsgálatot és számítógépes frekvencia analízist kell végezni., ki kell számítani a redukált lengésgyorsulás szórás értékét. A kényelmes jármű ISO mutatója 0,1-0,3 m/s 2 értékek közé esik

10 2.5. A dinamikus tényező: A járműalkatrészek igénybevétele az álló helyzetben mért statikus terhelésen túl menet közben dinamikus többlet terheléssel megnövekszik. A növekedés mértékét az ún. dinamikus tényező (d) fejezi ki. F ö F st F din F ö m g m a d F F ö st m g m m a g 1 a g ahol: a a terhelő tömeg függőleges lengésgyorsulása (m/s 2 ) F ö az összes igénybevétel (N); F st statikus terhelés (N); F din - dinamikus többletterhelés (N); m terhelő tömeg (kg); g nehézségi gyorsulás (9,81 m/s 2 )
; F st statikus terhelés (N); F din - dinamikus többletterhelés (N); m terhelő tömeg (kg); g nehézségi")
11 A dinamikus tényező értéke 2-3 között változik. Csökkenteni lehet megfelelő lengéscsillapítókkal, helyesen megválasztott gumiabroncsokkal, gumiperselyekkel (szilentblokkokkal) Futóművek aktivitása, önszabályozása A gépjárművek menetstabilitását a különböző futóműparaméterek megfelelő szabályozásával lehet növelni. A szabályozás történhet: - számítógépes külső szabályozással; - önszabályozással (pl. intelligens futóművek). A számítógépes külső szabályozós futóművek jelenleg még fejlesztés alatt állnak, szélesebb körű alkalmazásukat egyelőre műszaki, jogi és gazdasági problémák akadályozzák. Az intelligens futóműveknél a megfelelő paraméterek szabályozása történhet: - elmozdulás szabályozással; - erőszabályozással; - integrált szabályozással. Az önszabályozás megvalósítható különböző hosszirányú (R) és beépítési szögű (κ) lengő rudakkal, lengő karokkal és nagy térfogatú önbeálló gumiágyazásokkal (elasztométerekkel)

12 Az elmozdulás szabályozása: cos sin cos R z R R y R z b R y a c y z - főmozgás y - mellékmozgás

13 A főmozgás lehet például a tengelycsonkon lévő gömbcsukló függőleges elmozdulása, a mellékmozgás keresztirányú elmozdulása, amely a kerékdőlést vagy a kerékösszetartást változtatja meg. Erőszabályozás: R F S R g A tengelycsonk gömbcsuklójára ható erő deformálja a lengőrúdhoz kapcsolódó elasztómétert, a gömbcsukló elmozdul, ami a kerékdőlést vagy kerékösszetartást változtatja. Kettős elmozdulás szabályozás: A BMW gépkocsikhoz alkalmazott megoldás. A tengelycsonkhoz rögzített gömbcsukló R sugarú köríven tud elmozdulni, de a két rúdrész által bezárt szög változtatásával az R sugár is változtatható, így a gömbcsukló keresztirányú elmozdulása degresszív vagy progresszív pályán is történhet

14 tg R 1 R2 sin R cos 2 R ( R 1 R 2 cos ) 2 ( R 2 sin )
")
15 Integrált szabályozás: Első futómű A kerékösszetartás a fékerő és a kormánymechanizmus elmozdulása hatására változik a menetstabilitás igényéből meghatározott célfüggvény szerint. A korszerű első futóműveknél arra törekednek, hogy fékezéskor az összetartás ne változzék vagy kissé a széttartás felé módosuljon

16 Hátsó futómű A fékerő és a rudak elmozdulása együttesen alakítja ki a kerékösszetartás megfelelő értékét. A hátsó futóműveknél leggyakrabban a változás az összetartás irányába mutat

 -")
17 Integrált szabályozás több rudas (multilink) hátsó felfüggesztés esetén: (Honda Accord)
")
18 3. A futóművek geometriai jellemzői, paraméterei A futóművek vizsgálatakor, minősítésekor használatos geometriai jellemzők, paraméterek: A) Alap paraméterek: Kerékdőlés (γ), Kerékösszetartás (ν,α ν ), Csapterpesztés (δ), Csaphátradőlés (ε), Utánfutás (n a ), Kormánylegördülési sugár (R 0 ), Nyomtáv (B), Tengelytáv (L). B) Leszármaztatott paraméterek: Billenési momentán centrum, Momentán tengely, Bólintási centrum, Kerékdőlés változás, Összetartásváltozás, Nyomtávváltozás. Az alapparamétereket statikus paramétereknek, néha nullgeometriának is nevezik, mivel ezeket a jármű álló helyzetében lehet megmérni, beállítani. A leszármaztatott paramétereket dinamikus paraméterként is említi a szakirodalom

19 3.1. Alapparaméterek: Kerékdőlés (γ): A kerékdőlés a korszerű gépjárműveknél a legfontosabb, egyben sok vitát kiváltó paraméter. A nagyobb teljesítményű személygépkocsiknál és valamennyi versenyautónál negatív értékek jellemzőek. Más a követelmény a kerékdőléssel szemben kanyarodáskor és egyenes haladáskor. Kanyarodás közben a külső keréknek a keresztirányú álterhelődés következtében megnő a függőleges terhelése, vagyis dominánssá válik. A negatív dőlésszögű külső kerék így a nagyobb leszorító erő és a negatív dőlésszög miatt nagyobb oldalerőt képes felvenni, akár két -, háromszorost is. A belső oldali kerék is negatív szögű a kocsitesthez viszonyítva, de a kerék teteje kifelé dől a kanyarodás középpontjához viszonyítva, így az oldalerő felvétel szempontjából pozitívszögűnek minősül, ami kedvezőtlen a jármű kanyarstabilitására. A korszerű, intelligensnek nevezhető futóműveknél ezért elsődleges szabályozási cél a belső kerekek dőlésszögének változtatása a kocsitesthez viszonyítva pozitív irányba, vagyis a kerék tetejét a kanyar középpontja felé dönteni. A meghatározott célfüggvény szerinti kerékdőlés szabályozását a

20 kocsitest billenésére és az oldalerő növekedésére reagáló felfüggesztési rendszerrel lehet megvalósítani. A külső kerék által felvehető oldalerő változása a kerék dőlési szögtől. A gumiabroncs 165 R13 méretű, a kerékterhelés 400 kg. Egyenes haladáskor a döntött kerekek köríven akarnak gördülni, de a két kerék ellentétes irányba, így kénytelenek egyenesen haladni, ez a gumiabroncs deformálódásához vezet. Ezt kikényszerített ferdefutásnak nevezzük. (lásd részletes ismertetését a kormányzás kiegészítés fejezetben). Ha a gumiabroncs ezt a ferdefutást nem képes oldalrugalmasságából adódóan kiegyenlíteni, akkor gumikopás és a tapadási erő csökkenése következhet be. Mindezekből következően egyenes haladáskor a 0 kerékdőlés kedvező lenne, de a kanyarstabilitási igény ezzel ellentétes. Intelligens futómű igazodik az ellentétes követelményekhez, viszont a nem szabályozott futóműveknél már kompromisszumot köt a konstruktőr. Korszerű személygépkocsiknál az első futómű kerékdőlési szöge 0 - (-0,5 ) közötti, a hátsó futóművé (-1 ) (-2 ) közti értékű. Általános követelmény, hogy egy futóművön a két keréknek azonos legyenek a kerékdőlési szöge, már 0,1 0,2 eltérés esetén a jármű félrehúz
.")
21 Pozitív kerékdőlés: oldalerők Negatív kerékdőlés: oldalerők
22 3.1.2.Kerékösszetartás: v B 2 B 1 ( mm) v B2 B 2D 1 ( radián) v v 2D 180 ( fok ) α v = összetartási szög egy kerékre vonatkoztatva. A korszerű személygépkocsiknál a kerékösszetartás értékei nagy szórást mutatnak. Az első futóműnél általánosan 0-0,5, a hátsó futóműnél 0,5-1 a leggyakoribb érték. Az alapösszetartás ugyanis számos tényezőtől függ így többek között a
23 kerékdőléstől, a kerékdőlés elkormányzás közbeni változásától, a nyomtáv változásától, a hajtásrendszertől az összetartás menetközbeni változtatásától, az úgynevezett csapgeometriáról (ld. később). Az első futóműnél az összetartás a jármű sajátkormányzási tulajdonságát az oldalgyorsulástól függően a túlkormányzás felé változtatja, amíg a hátsó keréknél az alulkormányzás felé. Az ábra az első kerekek összetartásának hatását mutatja. Figyelembe véve a kerékterhelés kanyarodás közbeni változását, vagyis azt a szabályt, hogy kanyarodáskor a külső kerekek válnak dominánssá, jól látható, hogy a kanyarodás középpontja kifelé tolódik, vagyis a kanyarodási sugár csökken
24 Csapgeometria: A kormányzott kerekek kényszerkormányzáskor vagy önkormányzáskor a függőlegeshez közelálló tengely körül elfordulnak. Ezt a tengelyt nevezzük elkormányzási tengelynek. Ez lehet valós, mint például a merev hidas futóművek függőcsapszegének középvonala (innen ered a csapgeometria, csapterpesztés, csaphátradőlés elnevezés) vagy lehet vizuális, látszólagos. Az alsó felső gömbcsuklós tengelycsonk esetén a gömbcsuklók középpontját összekötő egyenes az elkormányzás tengelye. A McPherson futóműveknél az alsó gömbcsukló közepét és a támcsapágy deformációs középpontját összekötő egyenes körül fordul el a tengelycsonk. A dupla csuklós futóműveknél (ld. Audi 4-6-8) a tengelycsonk alsó és felső nyúlványai a lengőrudak által meghatározott pillanatnyi középpontok (momentán centrumok) körül fordulnak el. Miután a kerék ki berugózása és a rudakra ható oldalerők következtében a momentán centrumok állandóan változnak, így az elkormányzás tengelye is állandóan változik, vagyis ez a tengely virtuális és momentán. Az elkormányzási tengely dőlésszögei és a keréktalppont (N) és az elkormányzási tengelynek az útfelülettel alkotott dőléspontja (D) közti távolságok alkotják a csapgeometriát

25 Merev hidas első futómű (Ikarus) elkormányozási tengelye 1 csapágyanya 11 támgyűrű 21 szabályozó tárcsa 2 zárógyűrű 12 tömítőgyűrű 22 tárcsa 3 zárótárcsa 13 fékdob 23 tengelycsonk csapágy 4 anya 14 féktartó 24 tengely 5 kerékagy sapka 15 fékbetét 25 tengelycsonk 6 tömítés 16 féktartó lemez 26 nyomtávkar, bal 7 külső csapágy 17 fékpofa 8 csavar 18 tengelycsonk persely 9 kerékagy 19 tömítés 10 belső csapágy 20 tengelycsonk csapszeg
26 Háromszög-trapéz keresztlengőkaros futómű (Lada) - elkormányozási tengelye McPherson-típusú első futómű (Audi 80) - elkormányozási tengelye
 - elkormányozási tengelye - 27")
27 Dupla csuklós mellső futómű (Audi A4) - elkormányozási tengelye
28 csapterpesztés (δ) csaphátradőlés (ε) kormánylegördülési sugár (R 0 ) (elkormányzási sugár) utánfutás (n a )
29 Csapterpesztés, kormánylegördülési sugár (elkormányzási sugár) HAGYOMÁNYOS KORSZERŰ
30 Az elkormányzási sugár hatása a jármű menetstabilitására egyenlőtlen fékerők vagy gördülési ellenállások esetén. RÁKORMÁNYZÁS ELLENKORMÁNYZÁS M F a járműre ható elfordító nyomaték, M FK az egyenlőtlen kerékerőkből adódó elkormányzási nyomaték
31 Csaphátradőlés és utánfutás: A csaphátradőlés hatására elkormányzáskor a külső kerék teteje befele, a belsőjé kifelé dől, ez javítja a kanyarstabilitást. Az utánfutás következtében a kerekek a menetirányba igyekeznek beállni. Oldalszél hatása egyenes haladáskor Visszatérítő centrifugális erő kanyarodás közben
32 3.2. Leszármaztatott paraméterek Billenési momentán centrum: φ S k S k F fy S f G f Z k Z b Az ábra jelölései: S K a kocsitest súlypontja; S f a futómű súlypontja; G k a kocsitest súlya; G f a futómű súlya; M a billenési momentán centrum; Z k a külső kerék terhelése; Z b a belső kerék terhelése; F ky a kocsiestre ható oldalerő; F fy a futóműre ható oldalerő. A kocsitestre ható oldalerő (ez lehet kanyarodás közbeni centrifugális erő, oldalszél, oldallejtő) következtében a kocsitest megbillen ψ szöggel a pillanatnyi középpont
33 (momentán centrum) körül. A billenés következtében a kocsitest súlypontja oldalra, b távolságra eltolódik. Ennek hatására megváltozik mindkét kerék függőleges terhelése, bekövetkezik a már bemutatott első és második átterhelődés: Z k Z stk F ky h B k F fy R B Gk b B Z b Z stb F ky h B k F fy R B Gk b B Az egyenletek azt mutatják, hogy amennyivel csökken a belső kerék függőleges terhelése ugyanannyival növekszik a külső kerék terhelése. A kerék függőleges terhelése és az általa felvehető oldalerő közt viszont nem lineáris, hanem degresszív az összefüggés. Például ha a külső kerék függőleges terhelése kétszeresére nő, akkor az általa felvehető oldalerő nem kétszeresére, hanem másfélszeresére növekszik. Vagyis az átterhelődés következtében oldalerő vesztesség lép fel, ami a jármű kanyarodás stabilitását csökkenti. Tehát a felépítmény oldalbillenése kedvezőtlen jelenség, azt mérsékelni kell. Az oldaldőlés csökkenthető: - rugók merevítésével (de a lengéskényelmi követelmények korlátozzák); - a rugóbázis növelésével; - a kocsitest súlypontjának csökkentésével; - a momentán centrum emelésével; - keresztstabilizátor beépítésével; - számítógépes felépítmény szabályozással (ABC, Active Body Control rendszer). A billenési momentán centrum magassága függ a futómű tipusától és a felfüggesztés geometriai kialakításától. A momentán centrum meghatározható szerkesztéssel és számítással. A szerkesztés lényege, hogy először meghatározzuk a kerék talppontjának mozgásirányát a felépítmény billenése közben, majd a mozgásirányra merőleges egyenest húzva az kimetszi a futómű függőleges szimmetria tengelyén a
34 momentán centrumot. A legjellemzőbb futóműtípusok momentán centrumainak szerkesztése: 1) McPherson futómű momentán centruma: 2) Háromszög - trapéz keresztlengőkaros futómű momentán centruma:
35 3) Ferde tengelyű hosszlengőkarú futómű momentán centruma:
36 4) Négy lengőrudas merev tengelyes futómű momentán centruma: Felülnézet Oldalnézet
37 5) Csatolt hosszlengőkaros futómű momentán centruma: Billenési momentán tengely Az első és a hátső futómű billenési momentán centrumát összekötve kapjuk a jármű billenési momentán tengelyét. A momentán tengely helyzete lehet: 1) előre lejt, az első futómű billenési merevsége kisebb, mint a hátsó; 2) hátrafelé lejt, az első futómű billenési merevsége nagyobb, mint a hátsóé; 3) vízszintes, a futóművek billenési merevsége azonos. Az első és hátsó futómű oldalbillenési merevségének aránya befolyásolja a jármű sajátkormányzási tulajdonágainak változását az oldalgyorsulás függvényében. Ha a billenési momentán tengely előre lejt, akkor a jármű sajátkormányzása az
38 alulkormányzottság felé változik, ha hátrafelé lejt a változás a túlkormányzottság felé mutat
39 s 2 V R g Mitschke-féle diagram A jármű sajátkormányzási tulajdonságának változását legszemléletesebben a Mitschke-féle diagramon lehet bemutatni. Ezt a diagramot az úgynevezett körteszt eredményei alapján lehet megszerkeszteni. A jármű 100 m átmérőjű körpályán halad, 5 km/h sebességlépcsőben növekvő, de egy lépcsőn belül körönként állandó sebességgel. Mérni kell a sebességet és a kormánykerék elfordítási szögét. A kiindulási értéket lépésben haladva (2-3km/h) kell felvenni. A diagram vízszintes tengelye a fajlagos oldalgyorsulást mutatja, a függőleges tengely a tényleges és a lépésben felvett kormánykerék elfordítási szög hányadosát. Számos teszt és országúti vizsgálat azt mutatja, hogy a legbiztonságosabb a jármű, ha alulkormányzott és ez a tulajdonsága 0,5 g fajlagos oldalgyorsulás alatt nem változik
40 Bólintási centrum: A jármű felépítménye fékezéskor vagy gyorsuláskor a tehetetlenségi erő hatására a bólintási centrum körül elfordul. Ennek következtében a felépítmény súlypontja elmozdul előre, illetve hátra, aminek következtében megváltoznak a függőleges tengelyterhelések. L a G L h F Z Z L a G L h F Z Z k t hst h k T est e
41 Ahol Z e az első tengelyterhelés; Z h a hátsó tengelyterhelés; Z est az első tengely statikus terhelése; Z hst a hátsó tengely statikus terhelése; F T tömegerő; h a súlypont magassága; L a tengelytáv; G h a kocsitest súlya (N); a a súlypont hosszirányú elmozdulása. A hosszirányú átterhelődés is káros hatású, a tapadási erő csökkenéséhez vezet, aminek következtében romlik a jármű menetstabilitása. Az átterhelődés a bólintási centrum emelésével csökkenthető. A bólintási centrum magassága a futóművek típusától, a felfüggesztés geometriájától függ. A bólintás csökkenthető a rugók merevségének növelésével természetesen a rugózási kényelem megszabta keretek közt. Az ABC szabályozó rendszer a bólintó mozgást is figyeli és akadályozza. A bólintás különösen a motorkerékpárok stabilitását befolyásolja. A különböző típusú motorkerékpár felfüggesztéseket elsősorban a bólintási centrum emelésének céljával fejlesztették. Elől teleszkópos hátul lengővillás motorkerékpár bólintási centruma
42 Elől hátul lengővillás motorkerékpár bólintási centruma BMW R 1100 motorkerékpár bólintási centruma A kerékdőlés változás: A korszerű járművek futóműveinek kerékdőlése vagy külső számítógépes szabályozással vagy önszabályozással változtatható a jármű stabilitásának megtartása vagy növelése érdekében. A szabályozás célfüggvényének kimenő paramétere azonos: a kanyar külső oldalán a kerékdőlést negatív, a belső oldalán pozitív irányba kell változtatni. Számítógépes külső szabályozáskor ezt a változtatást
43 a jármű stabilitását meghatározó több paraméter függvényében lehet megadni, mint például a jármű sebessége, a különböző irányú gyorsulásai, a tapadási tényező változásai, stb. Az önszabályozós intelligens futóműveknél a kerékdőlés leggyakoribb esetben a kerék és a felépítmény közti elmozdulás, vagyis a kerék ki-, berugózása függvényében változik. A felépítmény kanyarodás közbeni billenése következtében a külső kerék berugózik, a belső kirugózik, ennek megfelelően határozható meg az önszabályozás célfüggvénye. A kerék ki-, berugózásával szabályozott kerékdőlés változás jól megvalósítható a háromszög trapéz kerszetlengőkaros felfüggesztésű futóműveknél, viszont egyáltalán nem a merev hidas futóműveknél. A McPheson futóműveknél csak a nyomtáv változásával érhető el kedvező kerékdőlés változás Összetartás változás: Az összetartás menetközbeni szabályozása is a jármű stabilitásának megtartását, növelését szolgálja elsősorban a jármű sajátkormányzási viselkedésének ellenőrzése, befolyásolása révén. Nevezetesen a jármű túlkormányzottá válását kell megakadályozni. Ennek megfelelően a kanyarodás közben a hátsó futóműnél a külső kereket befelé, az összetartás irányába kell kormányozni. Az első futóműnél a
44 túlkormányzás elkerülése érdekében éppen fordított a korrekció iránya. Az önkormányzott intelligens futóműveknél ez a szabályozás a kerekek ki berugózásával valósítható meg
45 Az Audi A4 személygépkocsi kerékdőlés és összetartás változási karakterisztikái
46 Nyomtávváltozás: A nyomtáv az egy futómű két kerékének talppontjai közti távolság. A nyomtáv változását ebből következően a talppontok keresztirányú elmozdulása idézi elő. A nyomtáv változását egyenes irányú haladás esetén vizsgálják, miközben a felépítmény változó bólintó mozgást végez, amit a váltakozó lassítás gyorsítás idéz elő. A nyomtávváltozás általában káros jelenség, miután a keresztben elmozduló kerekek megcsúszhatnak, melynek következtében csökken a kerék tapadása, a jármű elvesztheti a stabilitását. A merev hidas futóműveknél nincs nyomtávváltozás, míg független felfüggesztési futóműveknél a kerék ki-berugózása, a kerékdőlés, az összetartás változása a nyomtáv jelentős változását idézheti elő. A már említett vizsgálati eljárás során a kerekek talppontjai sinusos pályát írhatnak le. A kerék haladási irányát minden pontban a pálya érintője adja meg, amely α szöget zár be a kerék síkjával. Ez azt jelenti, hogy a csúszásmentes gördülés érdekében a kerék síkjának ebben a változó irányába kellene fordulnia, ha viszont ezt a felfüggesztés rendszere nem teszi lehetővé, akkor a kerék ilyen szögbe ferde futást végez. Ez az úgynevezett kikényszerített ferde futás. Ha a kerék teljesen merev, akkor a ferde futás a kerék megcsúszásával jár. Ha a kerék oldalirányban rugalmas, akkor képes ezt a kikényszerített ferdefutást oldalcsúszás nélkül teljesíti. Ennek az a feltétele, hogy az adott keréknek az adott jellemzők mellett meghatározható saját ferdefutási szöge (vagyis az a szög amelynél a kerék oldalcsúszás nélkül képes a saját síkjával ferdén futni), melyet δ - val jellemezhetünk, nagyobb legyen a nyomtávváltozásra kikényszerített ferdefutási szögnél. Ilyen esetben a futóművet nyomtávváltozása korrigáltnak nevezzük. Ha viszont a kikényszeríttet ferdefutási szög nagyobb a kerék saját ferdefutási szögénél a kerék oldalra megcsúszhat. Számos vizsgálat azt mutatja, hogy személygépkocsiknál, ha a nyomtávváltozás a kerék ± 40 mm-s ki berugózási tartományában kisebb 25 mmnél, akkor a gumiabroncs rugalmassága következtében nincs oldalcsúszás
47 Menetirány A kerekek haladása ki- berugózáskor A nyomtávváltozási karakterisztikák jellemző formái
48 4. Korszerű futóművek jellemző konstrukciói A jelenleg is gyártott futóműveket konstrukciójuk alapján az alábbiak szerint lehet csoportosítani: I. Merevhidas futóművek - laprugós merevhidas futóművek; - tekercsrugós merevhidas futóművek; - légrugós merevhidas futóművek; - kombinált lap és légrugós futóművek. II. Csatolt hosszlengőkaros futóművek: - rugóstagos csatolt kerekes futóművek; - különálló tekercsrugós csatolt kerekes futóművek III. Független kerék-felfüggesztésű futóművek: - egy keresztlengőkaros futóművek, - hosszlengőkaros futóművek, - ferde tengelyű hosszlengőkaros futóművek, - háromszög-trapáz keresztlengőkaros futóművek, - Mc Pherson típusú futóművek - elosztokinematikai futóművek a) kettős csuklós elven felépülő futóművek; b) soklengőkaros (Multilink, Mehrlenker, Raumlenker) futóművek. A három főcsoportba sorolás azon alapul, hogy egy futóművön belül a két kerék egymáshoz képest milyen mozgásokat végezhet. A térben hatféle mozgást különböztetünk meg:
49 1. x tengely irányú mozgás; 2. y irányú mozgás; 3. z irányú mozgás; 4. x tengely körüli elfordulás; 5. y tengely körüli elfordulás; 6. z tengely körüli elfordulás. A kinematika meghatározása szerint a térben való mozgásnak 6 szabadságfoka van. Mozgási lehetőség Futómű típusa Tengely irányú Tengely körüli mozgás elfordulás X Y Z X Y Z Merevhidas futómű Csatolt lengőkarú futómű Független felfüggesztésű futómű A táblázat adatait szabadságfokokban kifejezve: - merev hidas futómű szabadságfok: 0; - csatolt hosszlengőkaros futómű szabadságfoka: 2; - független kerékfelfüggesztésű futómű szabadságfoka: 6. A különböző futóműtípusok esetén az ismertetett alap (statikus) és leszármaztatott (dinamikus) paraméterek jellemző módon és értékben fordulnak elő. A futóműtípusok az alábbiak szerint minősíthetőek: - kinematikai paraméterek, - konstrukció bonyolultsága, - gyárthatóság, - tömeg, - karbantartási igény, - beépítési helyszükséglet
50 A futómű vizsgálat koordináta rendszerei Az egyes kerékfelfüggesztési rendszerek kinematikai vizsgálatát a felépítmény súlypontjához kötött x-y-z koordináta rendszerben végezzük, vagyis azt elemezzük, hogy a felépítményhez képest az egyes kerék milyen fő és melléktípusokat folytat. A dinamikus paramétereket ilyen vizsgálat keretében lehet minősíteni
51 4.1. Merevhidas futóművek: A merev hidas futóműveknél a két kerék egymáshoz viszonyítva nem végezhet semmiféle mozgást, vagyis a futómű szabadságfoka nulla. A két kereket szilárdságilag merev tengelytest vagy híd kapcsol össze. A kerekek a felépítményhez a tengelytest felfüggesztésén keresztül kapcsolódnak. A kerékfelfüggesztés szabadságfokát a felépítményhez viszonyított mozgásokból vezethetjük le. A tengelytest és így a két kerék x és y irányban nem mozoghat. Ezt kényszerekkel lehet megakadályozni. A kényszer lehet: - lengőrúd, mely egyszeres kényszer; - lengőkar, mely kétirányú kényszer; - laprugó, mely mozgást és forgást is képes megakadályozni. Tehát az Ikarus 200 típusú autóbusz első merev hídjának a mozgását az egyes és a kettes számú rudakkal lehet megakadályozni. A z irányú mozgás a lengés iránya. Ezt a mozgást a rugó és lengéscsillapító által szabályozva megengedjük. A tengelytest az x tengely körül elfordulhat, de az y és a z - tengely körüli elfordulását a harmadik és a negyedik számú rudakkal megakadályozzuk. Tehát a kerékfelfüggesztés rendszere két szabadságfokú, a többi négy szabadságfokot négy elemi (koordináta tengely irányú) rudakkal megakadályozzuk. A különböző merevhidas futóműveknél a rudak, laprugók, lengőkarok variációival alakítják ki a szükséges kényszereket

52 Ikarus 200 típusú autóbusz merevhidas első futóműve Ikarus 200 típusú autóbusz merevhidas első futóműve
53 VW laprugós merevhidas futómű 5 4 Mitsubishi Pajero tekercsrugós merevhidas futómű ) hídtest; 2) hosszlengőkar; 3) gumipersely; 4) Panhard-rúd; 5) Kerszetstabilizátor
54 4.2. Csatolt hosszlengőkaros futóművek: Opel Astra hátsó futóműve A csatolt hosszlengőkaros futóműveket félig független futóműveknek is nevezik, miután az egy futómű két kereke egymáshoz viszonyítva két szabadságfokú mozgást végezhet: elmozdulhat z tengely irányába és a tengelycsonkok elfordulhatnak részlegesen az y - tengely körül. Egy kerék felfüggesztése viszont csak egy szabadságfokú: az x - irányú mozgást és az y - tengely körüli elfordulást a hosszirányú lengőkar megakadályozza, az y - irányú mozgást és az x - és a z tengelyek körli elfordulást a csatló rúd meggátolja. A csatlórúd keresztmetszete nyílt, T,U, V alakú, ezáltal hajlításra, nyomásra merev, de csavarásra lágy, rugalmasan deformálodik. A csatolt hosszlengőkaros futóművek dinamikus paraméterei általában kedvezőtlenek, a kerékdőlés változásuk, az összetartás változásuk csekély, momentán centrumuk alacsony, viszont nyomtávváltozásuk kedvező. Ezek a futóművek igen széles körben elterjedtek a kis és közepes kategóriájú autóknál, szerkezetük egyszerű, kis tömegűek, könnyen gyárthatóak, karbantartást szinte nem igényelnek, kicsi a helyszükségletük, ami nagyobb csomagteret, rakfelületet eredményez. Nagyobb kategóriájú dinamikus járműveknél, versenyautóknál nem alkalmazzák
55 4.3. Független kerékfelfüggesztésű futóművek: A független kerékfelfüggesztésű futóműveknél az egy futóművön lévő két kerék egymástól függetlenül mozoghat, vagyis a futómű szabadságfoka hat. Viszont egy keréknek a felépítményhez képest csak egy szabadságfoka van, csak z irányba., a lengés irányába mozoghat, de a rugók, lengéscsillapítók korlátozása mellett. Az ilyen futóművek kerekének tengelycsonkján általában három kapcsolópontot alakítanak ki. Ennyi elegendő a tengelycsonk határozott megfogásához. A speciális, önszabályozott, elasztókinematikus futóműveken négy öt kapcsolópontot is találunk. Ha a kerékfelfüggesztést csak lengőrudak alkotják, akkor kerekenként ötre van szükség. Ilyenek a multilink futóművek (pl. Mercedes, Honda Accord stb). A független felfüggesztésű futóművekben a lengőkarok, lengőrudak különböző variációkban fordulnak elő. A lengőkarok, lengőrudak hosszainak, bekötési szögeinek célszerű megválasztásával, rugalmas, önbeálló csuklókkal (úgynevezett elasztométerekkel) különféle önszabályozó konstrukciókat lehet kialakítani
56 Hosszlengőkaros futóművek: Renault Megane hosszlengőkaros futóműve A hosszlengőkaros futóművek lengési tengelye merőleges a jármű hosszirányú szimmetria síkjára. Ebből adódóan a momentán centruma a talajon van, kerékdőlés változásra nem képes, viszont nincs nyomtávváltozása. Dinamikusabb járműveken
57 igényesebb keresztstabilizálással és rugózással együtt alkalmazzák (pl. Renault, Citroen stb) Ferde tengelyű hosszlengőkaros futóművek A hosszirányú lengőkar tengelye szöget zár be a jármű hossz és kerszt tengelyével egyaránt. Kedvező a momentán centruma, a kerékdőlés változása, kedvezőtlen az összetartás változása és a nyomtávváltozása. Előnye az egyszerű szerkezet, könnyű gyárthatóság, kis karbantartási igény, nagy szilárdság. Évtizedekig a közepes és nagy kategóriájú gépkocsik jellemző futóműve volt. Ma már alig alkalmazzák. Subaru E12 hátsó futómű
58 Háromszög trapéz keresztlengőkaros futóművek: Háromszög trapéz keresztlengőkaros futóműveknél a tengelycsonkon három csukló található. Az alsó és felső csuklóhoz kapcsolódnak a hárompontos keresztirányú felfüggesztő elemek, míg a középső csuklóhoz első futóműnél a nyomtávrúd, hátsó futóműveknél az önkormányzást szabályozó rúd vagy az összkerékkormányzású rendszer esetén a hátsó nyomtávrúd. A korszerű típusoknál a tengelycsonk felső nyúlványa egészen a gumiabroncs fölé emelkedik. A leggyakrabban alkalmazott futóműtípus. A kis és közepes kategóriájú autóknál a McPherson típusú futómű versenytársa, a nagyobb kategóriájú gépkocsiknál, versenyautóknál, autóbuszoknál egyre szélesebb körben alkalmazzák. A felfüggesztés geometriai méreteinek helyes megválasztásával szinte valamennyi dinamikus paraméter kedvezően alakítható. Alfa Romeo 147. első futóműve

59 Van Hool T9 típusú autóbusz első futóműve Az autóbuszoknál a tengelycsonk kettős kialakítású, a keresztlengőkarok az álló tengelycsonk részhez kapcsolódnak. Az itt alkalmazott csuklók csak egy szabadságfokúak, aminek a következtében nem azok alkotják az elkormányzás tengelyét, hanem a két tengelycsonk részt összekapcsoló függőcsapszeg
60 McPherson típusú futóművek: Az első generációs, úgynevezett koncentrikus McPherson futómű. Peugeot első futómű A McPherson típusú futóművek fél évszázada a kis és közepes autók egyik leggyakoribb futóműve. A kerék tengelycsonkját alul gömbcsuklós hárompontos keresztirányú felfüggesztés, a tengelycsonk felső részét pedig a teleszkópos lengéscsillapító vezeti meg. A lengéscsillapító akkor tölti be ezt a szerepét, ha a csillapító hengere mereven kapcsolódik a tengelycsonkhoz (pl. két csavarral rögzítve vagy besajtolva) és a csillapító rúdját a támcsapágy révén a felépítményhez rögzítik. A McPherson típusú futóművek paraméterei ma már egyre kevésbé felelnek meg a korszerű követelményeknek. A kerékdölés változás az első futóműnél a nagyobb csaphátradőléssel és nyomtávváltoztatással valósítható meg, hátul csak nagyobb nyomtávváltoztatás árán. Nagyarányú elterjedésének az oka egyszerű szerkezete,
61 kis helyfoglalása, mely elsősorban az elöl keresztben elhelyezett motorok számára előnyös. A korszerű McPherson futóművek excentrikus kialakításúak, ezeknél az alsó gömbcsukló nem a lengéscsillapító középvonalába esik, ezáltal az elkormányzási tengely terpesztése is lehet, ami az R 0 elkormányzási sugár negatív értékét eredményezi. Ez javítja a jármű iránytartását. Ford Focus C-MAX első futóműve
.")
62 Dupla csuklós futóművek: A korszerű intelligens futóművek elmozdulás és erő hatására egyaránt változtatják a jármű stabilitására leginkább kiható paramétereket. Az erőszabályozást elasztóméterek végzik, ezek általában nagytérfogató önbeálló gumiágyazások, de már megjelentek az acélrugóval kombinált elasztóméterek (ld. Ford Focus C-MAX hátsó futómű). Az elasztókinematikus önszabályozó futóművek egyik tipikusa a duplacsuklós elven (dual gelen prinzip, DGP) felépülő konstrukciók. Ilyen futómű elsőként a BMW 5. szériájánál jelent meg 1984-ben. BMW DGP első futóműve 1) stabilizátor kapcsoló rúd; 2) hátsó kereszt lengőrúd; 3) stabilizátor; 4) kormánygép; 5) rugós tag; 6) futómű test; 7) középső összekötő rúd; 8) első kereszt lengőrúd
 futóművek: Mercedes 124 hátsó futóműve A Mercedes soklengőrudas (multilink, mehlenker, raumlenker) Zomotor Ádám magyar mérnök tervezte 1983 ban.")
63 A duplacsuklós konstrukciót az első futóműveknél alkalmazzák az elkormányzási tengely paramétereinek dinamikus változása céljából Soklengőrudas (multilink) futóművek: Mercedes 124 hátsó futóműve A Mercedes soklengőrudas (multilink, mehlenker, raumlenker) Zomotor Ádám magyar mérnök tervezte 1983 ban. A hátsó futómű tengelycsonkján a szokásos három helyett öt tengelycsonk nyúlvány található, a hozzájuk csatlakozó lengőrudak nagytérfogatú gumiszilentblokkok révén kapcsolódnak a jármű hátsó segédvázához. Az öt lengőrúd alaphelyzetben a tengelycsonk öt szabadságfokával szemben kényszert képez, de a kerékre ható erők és a kerék ki-, berugózása következtében különbözőképpen elmozdul és a futómű paraméterek változását idézi elő. Dinamikusan változik a kerékdőlés, a kerékösszetartás, az elkormányzási tengely pozíciója, miközben a futómű nyomtávja alig változik. A felépítmény billenési

64 momentum centruma magasan helyezkedik el. Ez a futómű indokoltan nevezhető interaktívan szabályozott rendszerűnek (IDS). BMW 5. széria integrált hátsó futómű A multilink futómű továbbfejlesztett típusa a BMW 5. széria integrált hátsó futóműve. Ezen két új elem is megjelent: a szabad csuklós kétrészes lengőrúd és az elasztikus szabályozó rúd. Ezek hatására a futómű már kis oldal és hosszirányú erők és kis oldalbillenés esetén is önszabályozással változtatja a paramétereket. Ez különösen előnyös az aktív felépítmény szabályozó rendszerrel (ABC) felszerelt járműveknél, amelyeknél a felépítmény szinte nem végez billenő és bólintó mozgást
65 Weissach-típusú futóművek: A Weissach-típusú futómű a csatolt hosszlengőkaros futómű továbbfejlesztett változata. Elmarad a két lengőkart összekötő csatoló rúd, a kerekek felfüggesztése független, a hosszlengőkart két vagy három keresztrúd vezeti meg. A kerék ki-, berugózása vezérli a kerékdőlés és a kerékösszertás változását. Ennek a típusú futóműnek az önvezérlési tartománya kisebb, mint a multilink vagy az integrált futóműveknek. Elsősorban a közepes kategóriájú, dinamikus autókhoz alkalmazzák, ilyen hátsó futóműve van például a 3. szériájú BMW-nek, a Ford Focusnak, VW Golfnak, a Volvo 40 nek. Ford Focusnak C-MAX hátsó futóműve
JKL rendszerek. Közúti járművek szerkezeti felépítése. Szabó Bálint
 JKL rendszerek Közúti járművek szerkezeti felépítése Szabó Bálint 1 Közúti járművek szerkezeti felépítése Tartalom Bevezetés Járműdinamika Gépjárművek hajtásrendszerei Gépjármű fékrendszerek 2 2 Bevezetés
JKL rendszerek Közúti járművek szerkezeti felépítése Szabó Bálint 1 Közúti járművek szerkezeti felépítése Tartalom Bevezetés Járműdinamika Gépjárművek hajtásrendszerei Gépjármű fékrendszerek 2 2 Bevezetés
Mit nevezünk nehézségi erőnek?
 Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
JÁRMŰRENDSZEREK TERVEZÉSE (Tervezési útmutató) Oktatási segédlet
 Oktatási segédlet") JÁRMŰRENDSZEREK TERVEZÉSE (Tervezési útmutató) Oktatási segédlet 1 Tengelykapcsoló 1. Konstrukciós főméretek, befoglaló méretek 2. A nyomatékfelesleg tényező felvétele 3. A tárcsaszám, súrlódási tényező
JÁRMŰRENDSZEREK TERVEZÉSE (Tervezési útmutató) Oktatási segédlet 1 Tengelykapcsoló 1. Konstrukciós főméretek, befoglaló méretek 2. A nyomatékfelesleg tényező felvétele 3. A tárcsaszám, súrlódási tényező
Közúti járműrendszerek
 Közúti járműrendszerek 1 Alapfogalmak 1.1 Közúti jármű definíciója Közúton közlekedő szállító, vagy vontató eszköz, továbbá önjáró munkagép vagy vontatott munkagép. A közúti járművek fajtái Gépjármű: Közúti
Közúti járműrendszerek 1 Alapfogalmak 1.1 Közúti jármű definíciója Közúton közlekedő szállító, vagy vontató eszköz, továbbá önjáró munkagép vagy vontatott munkagép. A közúti járművek fajtái Gépjármű: Közúti
Gépjárművek és mobilgépek I.
 Gépjárművek és mobilgépek I. II. Előadás Hajtási módok, kanyarodás, fékek Összeállította: Dr. Sarka Ferenc Hajtási módok Elsőkerék-hajtás Hátsókerék-hajtás Összkerékhajtás Hátsókerék-hajtás Orrmotoros
Gépjárművek és mobilgépek I. II. Előadás Hajtási módok, kanyarodás, fékek Összeállította: Dr. Sarka Ferenc Hajtási módok Elsőkerék-hajtás Hátsókerék-hajtás Összkerékhajtás Hátsókerék-hajtás Orrmotoros
Versenyautó futóművek. Járműdinamikai érdekességek a versenyautók világából
 Versenyutó futóművek Járműdinmiki érdekességek versenyutók világából Trtlom Bevezetés Alpfoglmk A gumibroncs Futómű geometri Átterhelődések Futómű kinemtik 2 Trtlom 2 Bevezetés Bevezetés Alpfoglmk A gumibroncs
Versenyutó futóművek Járműdinmiki érdekességek versenyutók világából Trtlom Bevezetés Alpfoglmk A gumibroncs Futómű geometri Átterhelődések Futómű kinemtik 2 Trtlom 2 Bevezetés Bevezetés Alpfoglmk A gumibroncs
MUNKAANYAG. Dr. Lakatos István. 3500 kilogramm alatti összgördülő súlyú járművek futóművei és rugózása. A követelménymodul megnevezése:
 Dr. Lakatos István 3500 kilogramm alatti összgördülő súlyú járművek futóművei és rugózása A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06 A tartalomelem azonosító száma
Dr. Lakatos István 3500 kilogramm alatti összgördülő súlyú járművek futóművei és rugózása A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06 A tartalomelem azonosító száma
Osvald Ferenc. A súlypont szerepe - gépjármű közlekedés kicsit másként
 Osvald Ferenc A súlypont szerepe - gépjármű közlekedés kicsit másként Több tűzoltó gépjármű baleset után heves érzelmi reakcióktól mentesen - érdemes megvizsgálni miben más ezek vezetése? Igazságügyi szakértőt
Osvald Ferenc A súlypont szerepe - gépjármű közlekedés kicsit másként Több tűzoltó gépjármű baleset után heves érzelmi reakcióktól mentesen - érdemes megvizsgálni miben más ezek vezetése? Igazságügyi szakértőt
VIZSGABIZTOS KÉPZÉS. 2-M.3. Haszonjárművek futóművei. Budapest, 2010. Kádár Lehel. Kiegészítő képzés
 VIZSGABIZTOS KÉPZÉS Kiegészítő képzés 2-M.3. Haszonjárművek futóművei Kádár Lehel Budapest, 2010. 1 Haszonjármű futóművek Ebben a kurzusban a 3,5 tonnánál nagyobb össztömegű haszonjárművek (teherautók,
VIZSGABIZTOS KÉPZÉS Kiegészítő képzés 2-M.3. Haszonjárművek futóművei Kádár Lehel Budapest, 2010. 1 Haszonjármű futóművek Ebben a kurzusban a 3,5 tonnánál nagyobb össztömegű haszonjárművek (teherautók,
Járműmechanikamechanika Dr Emőd István
 Járműmechanikamechanika Dr Emőd István 3/1 Hosszdinamika Teljesítmény- és energiaigény a legyőzendő menetellenállások határozzák meg. Ezek: állandósult állapotban: a gördülési ellenállás a légellenállás
Járműmechanikamechanika Dr Emőd István 3/1 Hosszdinamika Teljesítmény- és energiaigény a legyőzendő menetellenállások határozzák meg. Ezek: állandósult állapotban: a gördülési ellenállás a légellenállás
A Horváth Mérnökiroda, A Budapesti Műszaki Egyetem Gépjárművek Tanszéke. A Schwarzmüller Járműgyártó és Kereskedelmi Kft
 A járóképes alvázakra épített különböző felépítményekkel kialakítható tehergépkocsik forgalombahelyezésének hatósági eljárásához A Horváth Mérnökiroda, A Budapesti Műszaki Egyetem Gépjárművek Tanszéke
A járóképes alvázakra épített különböző felépítményekkel kialakítható tehergépkocsik forgalombahelyezésének hatósági eljárásához A Horváth Mérnökiroda, A Budapesti Műszaki Egyetem Gépjárművek Tanszéke
VIZSGABIZTOS KÉPZÉS. 09_3. Intelligens futóművek. Kádár Lehel. Budapest,
 VIZSGABIZTOS KÉPZÉS 09_3. Intelligens futóművek Kádár Lehel Budapest, 2012. - 1 - 1. Alapfogalmak Ebben a fejezetben a futóművek fogalmát és tartalmát tágabban értelmezzük az alaptanfolyam tananyagához
VIZSGABIZTOS KÉPZÉS 09_3. Intelligens futóművek Kádár Lehel Budapest, 2012. - 1 - 1. Alapfogalmak Ebben a fejezetben a futóművek fogalmát és tartalmát tágabban értelmezzük az alaptanfolyam tananyagához
1. Feladatok a dinamika tárgyköréből
 1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
VIZSGABIZTOS KÉPZÉS. 09_2. Kormányzás. Kádár Lehel. Budapest, 2012. - 1 -
 VIZSGABIZTOS KÉPZÉS 09_2. Kormányzás Kádár ehel Budapest, 2012. - 1 - 1.) A közúti járművek kormányzásával szembeni általános követelmények A közúti járművek kormányzásának az alábbi általános követelményeknek
VIZSGABIZTOS KÉPZÉS 09_2. Kormányzás Kádár ehel Budapest, 2012. - 1 - 1.) A közúti járművek kormányzásával szembeni általános követelmények A közúti járművek kormányzásának az alábbi általános követelményeknek
6. MECHANIKA-STATIKA GYAKORLAT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya, Culmann-szerkesztés, Ritter-számítás
 ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
Formula Student versenyautó futóművének tervezése
 Gépészmérnöki és Informatikai Kar Gép- és Terméktervezési Intézet SZAKDOLGOZAT Formula Student versenyautó futóművének tervezése KÉSZÍTETTE: Zabos Tamás Géptervező hallgató GE8UJY KONZULENS: Dr. Bihari
Gépészmérnöki és Informatikai Kar Gép- és Terméktervezési Intézet SZAKDOLGOZAT Formula Student versenyautó futóművének tervezése KÉSZÍTETTE: Zabos Tamás Géptervező hallgató GE8UJY KONZULENS: Dr. Bihari
EGYSZERŰ GÉPEK. Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét.
 EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
6. MECHANIKA-STATIKA GYAKORLAT (kidolgozta: Triesz Péter, egy. ts.; Tarnai Gábor, mérnöktanár)
") SZÉHNYI ISTVÁN GYT LKLZOTT HNIK TNSZÉK 6. HNIK-STTIK GYKORLT (kidolgozta: Triesz Péter egy. ts.; Tarnai Gábor mérnöktanár) Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa gy létrát egy
SZÉHNYI ISTVÁN GYT LKLZOTT HNIK TNSZÉK 6. HNIK-STTIK GYKORLT (kidolgozta: Triesz Péter egy. ts.; Tarnai Gábor mérnöktanár) Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa gy létrát egy
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS-
 A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
A végeselem módszer alapjai. 2. Alapvető elemtípusok
 A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
Járművek lengései. Gépjármű Futóművek II. Szabó Bálint
 Járművek lengései Gépjármű Futóművek II. Szabó Bálint 1 Bevezetés 2 2 Bevezetés Koordináta-rendszerek Gyakran alkalmazott koordináta rendszer 3 SAE koordináta rendszer 3 Bevezetés Dinamikai irányok felbontása
Járművek lengései Gépjármű Futóművek II. Szabó Bálint 1 Bevezetés 2 2 Bevezetés Koordináta-rendszerek Gyakran alkalmazott koordináta rendszer 3 SAE koordináta rendszer 3 Bevezetés Dinamikai irányok felbontása
Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja
 bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel
bmemotion Kerékagymotoros Formula Student versenyautó menetdinamikai szimulációja Csortán-Szilágyi György Dorogi János Nagy Ádám Célunk Fő célunk: Villamos hajtású versenyautó tervezése és építése - részvétel
Tömegpontok mozgása egyenes mentén, hajítások
 2. gyakorlat 1. Feladatok a kinematika tárgyköréből Tömegpontok mozgása egyenes mentén, hajítások 1.1. Feladat: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel
2. gyakorlat 1. Feladatok a kinematika tárgyköréből Tömegpontok mozgása egyenes mentén, hajítások 1.1. Feladat: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel
Rezgőmozgás, lengőmozgás
 Rezgőmozgás, lengőmozgás A rezgőmozgás időben ismétlődő, periodikus mozgás. A rezgő test áthalad azon a helyen, ahol egyensúlyban volt a kitérítés előtt, és két szélső helyzet között periodikus mozgást
Rezgőmozgás, lengőmozgás A rezgőmozgás időben ismétlődő, periodikus mozgás. A rezgő test áthalad azon a helyen, ahol egyensúlyban volt a kitérítés előtt, és két szélső helyzet között periodikus mozgást
KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS
 KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS 1 EGYENLETES KÖRMOZGÁS Pálya kör Út ív Definíció: Test körpályán azonos irányban haladva azonos időközönként egyenlő íveket tesz meg. Periodikus mozgás 2 PERIODICITÁS
KÖRMOZGÁS, REZGŐMOZGÁS, FORGÓMOZGÁS 1 EGYENLETES KÖRMOZGÁS Pálya kör Út ív Definíció: Test körpályán azonos irányban haladva azonos időközönként egyenlő íveket tesz meg. Periodikus mozgás 2 PERIODICITÁS
MUNKAANYAG. Macher Zoltán. 3500 kilogramm alatti összgördülő súlyú. járművek kormányberendezéseinek. diagnosztikája, javítása, beállítása
 Macher Zoltán 3500 kilogramm alatti összgördülő súlyú járművek kormányberendezéseinek diagnosztikája, javítása, beállítása A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06
Macher Zoltán 3500 kilogramm alatti összgördülő súlyú járművek kormányberendezéseinek diagnosztikája, javítása, beállítása A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06
Felső végükön egymásra támaszkodó szarugerendák egyensúlya
 1 Felső végükön egymásra támaszkodó szarugerendák egyensúlya Az [ 1 ] példatárban találtunk egy érdekes feladatot, melynek egy változatát vizsgáljuk meg itt. A feladat Ehhez tekintsük az 1. ábrát! 1. ábra
1 Felső végükön egymásra támaszkodó szarugerendák egyensúlya Az [ 1 ] példatárban találtunk egy érdekes feladatot, melynek egy változatát vizsgáljuk meg itt. A feladat Ehhez tekintsük az 1. ábrát! 1. ábra
Fizika alapok. Az előadás témája
 Az előadás témája Körmozgás jellemzőinek értelmezése Általános megoldási módszer egyenletes körmozgásnál egy feladaton keresztül Testek mozgásának vizsgálata nem inerciarendszerhez képest Centripetális
Az előadás témája Körmozgás jellemzőinek értelmezése Általános megoldási módszer egyenletes körmozgásnál egy feladaton keresztül Testek mozgásának vizsgálata nem inerciarendszerhez képest Centripetális
Tervezés katalógusokkal kisfeladat
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes tervezés, méretezés és gyártás (BME KOJHM401) Tervezés katalógusokkal kisfeladat Járműelemek és Járműszerkezetanalízis Tanszék Ssz.:...... Név:.........................................
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes tervezés, méretezés és gyártás (BME KOJHM401) Tervezés katalógusokkal kisfeladat Járműelemek és Járműszerkezetanalízis Tanszék Ssz.:...... Név:.........................................
A járművek menetdinamikája. Készítette: Szűcs Tamás
 A járművek menetdinamikája Készítette: Szűcs Tamás 2016 Tartalomjegyzék II. Menetdinamika: 1. Kicsúszási határsebesség 2. Kiborulási határsebesség 3. Komplex feladatok III. Motorjellemzők: 4. Lökettérfogat,
A járművek menetdinamikája Készítette: Szűcs Tamás 2016 Tartalomjegyzék II. Menetdinamika: 1. Kicsúszási határsebesség 2. Kiborulási határsebesség 3. Komplex feladatok III. Motorjellemzők: 4. Lökettérfogat,
SCM 012-130 motor. Típus
 SCM 012-130 motor HU ISO A Sunfab SCM robusztus axiáldugattyús motorcsalád, amely különösen alkalmas mobil hidraulikus rendszerekhez. A Sunfab SCM könyökös tengelyes, gömbdugattyús típus. A kialakítás
SCM 012-130 motor HU ISO A Sunfab SCM robusztus axiáldugattyús motorcsalád, amely különösen alkalmas mobil hidraulikus rendszerekhez. A Sunfab SCM könyökös tengelyes, gömbdugattyús típus. A kialakítás
(11) Lajstromszám: E (13) T2 EURÓPAI SZABADALOM SZÖVEGÉNEK FORDÍTÁSA
 Lajstromszám: E (13) T2 EURÓPAI SZABADALOM SZÖVEGÉNEK FORDÍTÁSA") !HU000004581T2! (19) HU (11) Lajstromszám: E 004 581 (13) T2 MAGYAR KÖZTÁRSASÁG Magyar Szabadalmi Hivatal EURÓPAI SZABADALOM SZÖVEGÉNEK FORDÍTÁSA (21) Magyar ügyszám: E 04 728604 (22) A bejelentés napja:
!HU000004581T2! (19) HU (11) Lajstromszám: E 004 581 (13) T2 MAGYAR KÖZTÁRSASÁG Magyar Szabadalmi Hivatal EURÓPAI SZABADALOM SZÖVEGÉNEK FORDÍTÁSA (21) Magyar ügyszám: E 04 728604 (22) A bejelentés napja:
MECHANIKA I. rész: Szilárd testek mechanikája
 Egészségügyi mérnökképzés MECHNIK I. rész: Szilárd testek mechanikája készítette: Németh Róbert Igénybevételek térben I. z alapelv ugyanaz, mint síkban: a keresztmetszet egyik oldalán levő szerkezetrészre
Egészségügyi mérnökképzés MECHNIK I. rész: Szilárd testek mechanikája készítette: Németh Róbert Igénybevételek térben I. z alapelv ugyanaz, mint síkban: a keresztmetszet egyik oldalán levő szerkezetrészre
Hidrosztatika. Folyadékok fizikai tulajdonságai
 Hidrosztatika A Hidrosztatika a nyugalomban lévő folyadékoknak a szilárd testekre, felületekre gyakorolt hatásával foglalkozik. Tárgyalja a nyugalomban lévő folyadékok nyomásviszonyait, vizsgálja a folyadékba
Hidrosztatika A Hidrosztatika a nyugalomban lévő folyadékoknak a szilárd testekre, felületekre gyakorolt hatásával foglalkozik. Tárgyalja a nyugalomban lévő folyadékok nyomásviszonyait, vizsgálja a folyadékba
BEMUTATÓ FELADATOK (2) ÁLTALÁNOS GÉPTAN tárgyból
 ÁLTALÁNOS GÉPTAN tárgyból") BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
BEMUTATÓ FELADATOK () 1/() Egy mozdony vízszintes 600 m-es pályaszakaszon 150 kn állandó húzóer t fejt ki. A vonat sebessége 36 km/h-ról 54 km/h-ra növekszik. A vonat tömege 1000 Mg. a.) Mekkora a mozgási
HELYI TANTERV. Mechanika
 HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Munka, energia Munkatétel, a mechanikai energia megmaradása
 Munka, energia Munkatétel, a mechanikai energia megmaradása Munkavégzés történik ha: felemelek egy könyvet kihúzom az expandert A munka Fizikai értelemben munkavégzésről akkor beszélünk, ha egy test erő
Munka, energia Munkatétel, a mechanikai energia megmaradása Munkavégzés történik ha: felemelek egy könyvet kihúzom az expandert A munka Fizikai értelemben munkavégzésről akkor beszélünk, ha egy test erő
CAD-CAM-CAE Példatár
 CAD-CAM-CAE Példatár A példa megnevezése: A példa száma: A példa szintje: CAx rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: VEM Rúdszerkezet sajátfrekvenciája ÓE-A05 alap közepes haladó
CAD-CAM-CAE Példatár A példa megnevezése: A példa száma: A példa szintje: CAx rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: VEM Rúdszerkezet sajátfrekvenciája ÓE-A05 alap közepes haladó
W = F s A munka származtatott, előjeles skalármennyiség.
 Ha az erő és az elmozdulás egymásra merőleges, akkor fizikai értelemben nem történik munkavégzés. Pl.: ha egy táskát függőlegesen tartunk, és úgy sétálunk, akkor sem a tartóerő, sem a nehézségi erő nem
Ha az erő és az elmozdulás egymásra merőleges, akkor fizikai értelemben nem történik munkavégzés. Pl.: ha egy táskát függőlegesen tartunk, és úgy sétálunk, akkor sem a tartóerő, sem a nehézségi erő nem
Pere Balázs október 20.
 Végeselem anaĺızis 1. előadás Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2014. október 20. Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)?
Végeselem anaĺızis 1. előadás Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2014. október 20. Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)? Mi az a VégesElem Anaĺızis (VEA)?
Mechanika. Kinematika
 Mechanika Kinematika Alapfogalmak Anyagi pont Vonatkoztatási és koordináta rendszer Pálya, út, elmozdulás, Vektormennyiségek: elmozdulásvektor Helyvektor fogalma Sebesség Mozgások csoportosítása A mozgásokat
Mechanika Kinematika Alapfogalmak Anyagi pont Vonatkoztatási és koordináta rendszer Pálya, út, elmozdulás, Vektormennyiségek: elmozdulásvektor Helyvektor fogalma Sebesség Mozgások csoportosítása A mozgásokat
Rakományrögzítés. Ezek lehetnek: A súrlódási tényező növelése, Kitámasztás, Kikötés, lekötés. 1. A súrlódási tényező növelése
 Rakományrögzítés A szállító járműre felrakott áruk, termékek a szállítás során fellépő hatások (rázkódás, gyorsulás, fékezés, kanyarodás, stb.) miatt elmozdulhatnak, elcsúszhatnak, felborulhatnak. Ennek
Rakományrögzítés A szállító járműre felrakott áruk, termékek a szállítás során fellépő hatások (rázkódás, gyorsulás, fékezés, kanyarodás, stb.) miatt elmozdulhatnak, elcsúszhatnak, felborulhatnak. Ennek
PÉLDÁK ERŐTÖRVÉNYEKRE
 PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
DINAMIKA ALAPJAI. Tömeg és az erő
 DINAMIKA ALAPJAI Tömeg és az erő NEWTON ÉS A TEHETETLENSÉG Tehetetlenség: A testek maguktól nem képesek megváltoztatni a mozgásállapotukat Newton I. törvénye (tehetetlenség törvénye): Minden test nyugalomban
DINAMIKA ALAPJAI Tömeg és az erő NEWTON ÉS A TEHETETLENSÉG Tehetetlenség: A testek maguktól nem képesek megváltoztatni a mozgásállapotukat Newton I. törvénye (tehetetlenség törvénye): Minden test nyugalomban
Oktatási Hivatal FIZIKA I. KATEGÓRIA. A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FELADATOK
 Oktatási Hivatal A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA I. KATEGÓRIA FELADATOK Bimetal motor tulajdonságainak vizsgálata A mérőberendezés leírása: A vizsgálandó
Oktatási Hivatal A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA I. KATEGÓRIA FELADATOK Bimetal motor tulajdonságainak vizsgálata A mérőberendezés leírása: A vizsgálandó
MUNKAANYAG. Dr. Lakatos István. Futóművek diagnosztikája és javítása 3500 kilogramm feletti összgördülő súlyú járműveken
 Dr. Lakatos István Futóművek diagnosztikája és javítása 3500 kilogramm feletti összgördülő súlyú járműveken A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06 A tartalomelem
Dr. Lakatos István Futóművek diagnosztikája és javítása 3500 kilogramm feletti összgördülő súlyú járműveken A követelménymodul megnevezése: Gépjárműjavítás I. A követelménymodul száma: 0675-06 A tartalomelem
Mechanika - Versenyfeladatok
 Mechanika - Versenyfeladatok 1. A mellékelt ábrán látható egy jobbmenetű csavar és egy villáskulcs. A kulcsra ható F erővektor nyomatékot fejt ki a csavar forgatása céljából. Az erő támadópontja és az
Mechanika - Versenyfeladatok 1. A mellékelt ábrán látható egy jobbmenetű csavar és egy villáskulcs. A kulcsra ható F erővektor nyomatékot fejt ki a csavar forgatása céljából. Az erő támadópontja és az
Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára. Ütemterv
 1 éves, járműmérnöki BSc szakos hallgatók számára. Ütemterv") Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára Ütemterv Tanulmányi Előadás Gyakorlat hét 1 Feltételek ismertetése. Gépkocsi története. Járműtípusok Számpéldák
Gépjárművek és mobilgépek I. (GEGET702-B) 1 éves, járműmérnöki BSc szakos hallgatók számára Ütemterv Tanulmányi Előadás Gyakorlat hét 1 Feltételek ismertetése. Gépkocsi története. Járműtípusok Számpéldák
CITROËN JUMPER Tehergépkocsi
 CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2013. február Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998
CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2013. február Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998
Cölöpcsoport elmozdulásai és méretezése
 18. számú mérnöki kézikönyv Frissítve: 2016. április Cölöpcsoport elmozdulásai és méretezése Program: Fájl: Cölöpcsoport Demo_manual_18.gsp A fejezet célja egy cölöpcsoport fejtömbjének elfordulásának,
18. számú mérnöki kézikönyv Frissítve: 2016. április Cölöpcsoport elmozdulásai és méretezése Program: Fájl: Cölöpcsoport Demo_manual_18.gsp A fejezet célja egy cölöpcsoport fejtömbjének elfordulásának,
Szilárd testek rugalmassága
 Fizika villamosmérnököknek Szilárd testek rugalmassága Dr. Giczi Ferenc Széchenyi István Egyetem, Fizika és Kémia Tanszék Győr, Egyetem tér 1. 1 Deformálható testek (A merev test idealizált határeset.)
Fizika villamosmérnököknek Szilárd testek rugalmassága Dr. Giczi Ferenc Széchenyi István Egyetem, Fizika és Kémia Tanszék Győr, Egyetem tér 1. 1 Deformálható testek (A merev test idealizált határeset.)
1. Előzmények A korábbi fejlesztések, majd az Ikarus 435 típ. autóbuszokban alkalmazott HB 93 típus gyártása és évtizedeken keresztül történő javítás
 1. Előzmények A korábbi fejlesztések, majd az Ikarus 35 típ. autóbuszokban alkalmazott HB 93 típus gyártása és évtizedeken keresztül történő javítás során értékes tapasztalatok halmozódtak fel, amelyek
1. Előzmények A korábbi fejlesztések, majd az Ikarus 35 típ. autóbuszokban alkalmazott HB 93 típus gyártása és évtizedeken keresztül történő javítás során értékes tapasztalatok halmozódtak fel, amelyek
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS!
 Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
ÚJ CITROËN JUMPER Tehergépkocsi
 ÚJ CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2014 új Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998 max.
ÚJ CITROËN JUMPER Tehergépkocsi Műszaki jellemzők 2014 új Jumper általános műszaki jellemzők Motor HDi 110 HDi 130 HDi 150 HDi 180 hengerek száma 4 4 4 4 hengerűrtartalom (cm 3 ) 2198 2198 2198 2998 max.
Pneumatikus kompatibilitás
 Pneumatikus kompatibilitás Farkas József, Kőfalusi Pál, Dr. Varga Ferenc Gépjárművek üzeme I. laboratóriumi gyakorlat 1 Lektorálta és szerkesztette Dr. Varga Ferenc és Dr. Emőd István Tartalomjegyzék:
Pneumatikus kompatibilitás Farkas József, Kőfalusi Pál, Dr. Varga Ferenc Gépjárművek üzeme I. laboratóriumi gyakorlat 1 Lektorálta és szerkesztette Dr. Varga Ferenc és Dr. Emőd István Tartalomjegyzék:
SCM 012-130 motor. Típus
 SCM 012-130 motor HU SAE A Sunfab SCM robusztus axiáldugattyús motorcsalád, amely különösen alkalmas mobil hidraulikus rendszerekhez. A Sunfab SCM könyökös tengelyes, gömbdugattyús típus. A kialakítás
SCM 012-130 motor HU SAE A Sunfab SCM robusztus axiáldugattyús motorcsalád, amely különösen alkalmas mobil hidraulikus rendszerekhez. A Sunfab SCM könyökös tengelyes, gömbdugattyús típus. A kialakítás
TERVEZÉS KATALÓGUSOKKAL KISFELADAT
 Dr. Nyitrai János Dr. Nyolcas Mihály TERVEZÉS KATALÓGUSOKKAL KISFELADAT Segédlet a Jármű- és hajtáselemek III. tantárgyhoz Kézirat 2012 TERVEZÉS KATALÓGUSOKKAL KISFELADAT "A" típusú feladat: Pneumatikus
Dr. Nyitrai János Dr. Nyolcas Mihály TERVEZÉS KATALÓGUSOKKAL KISFELADAT Segédlet a Jármű- és hajtáselemek III. tantárgyhoz Kézirat 2012 TERVEZÉS KATALÓGUSOKKAL KISFELADAT "A" típusú feladat: Pneumatikus
SZÁMÍTÁSI FELADATOK I.
 SZÁMÍTÁSI FELADATOK I. A feladatokat figyelmesen olvassa el! A válaszokat a feladatban előírt módon adja meg! A számítást igénylő feladatoknál minden esetben először írja fel a megfelelő összefüggést (képletet),
SZÁMÍTÁSI FELADATOK I. A feladatokat figyelmesen olvassa el! A válaszokat a feladatban előírt módon adja meg! A számítást igénylő feladatoknál minden esetben először írja fel a megfelelő összefüggést (képletet),
1. Mozgás Magyar Attila
 1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
Gépjárművek és mobilgépek I.
 Gépjárművek és mobilgépek I. V. Előadás Kerékfelfüggesztés Összeállította: Dr. Sarka Ferenc A kerékfelfüggesztés feladata Az úttest felülete nem tökéletesen sima, ennek eredményeként rezgések adódnak át
Gépjárművek és mobilgépek I. V. Előadás Kerékfelfüggesztés Összeállította: Dr. Sarka Ferenc A kerékfelfüggesztés feladata Az úttest felülete nem tökéletesen sima, ennek eredményeként rezgések adódnak át
Kiöntött síncsatornás felépítmény kialakításának egyes elméleti kérdései
 Kiöntött síncsatornás felépítmény kialakításának egyes elméleti kérdései VII. Városi Villamos Vasúti Pálya Napra Budapest, 2014. április 17. Major Zoltán egyetemi tanársegéd Széchenyi István Egyetem, Győr
Kiöntött síncsatornás felépítmény kialakításának egyes elméleti kérdései VII. Városi Villamos Vasúti Pálya Napra Budapest, 2014. április 17. Major Zoltán egyetemi tanársegéd Széchenyi István Egyetem, Győr
Szakmai nap 2013. február r 7. Zrt. Magyar Államvasutak. Szolgáltat. stabilitása sa. a pálya-jármű kölcsönhatás kérdéskörének tükrében
 213. február r 7. Magyar Államvasutak Zrt. Vasúti MérnM Vasúti jármj rművek keresztfutás-stabilit stabilitása sa a pályap lya-jármű kölcsönhatás kérdéskörének tükrt krében Kemény Dániel D György fejlesztőmérn
213. február r 7. Magyar Államvasutak Zrt. Vasúti MérnM Vasúti jármj rművek keresztfutás-stabilit stabilitása sa a pályap lya-jármű kölcsönhatás kérdéskörének tükrt krében Kemény Dániel D György fejlesztőmérn
3. feladat Géprajz-Gépelemek (GEGET224B) c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára
 c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára") 3. feladat Géprajz-Gépelemek (GEGET224B) c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára TENGELYVÉG CSAPÁGYAZÁSA, útmutató segítségével d. A táblázatban szereplő adatok alapján
3. feladat Géprajz-Gépelemek (GEGET224B) c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára TENGELYVÉG CSAPÁGYAZÁSA, útmutató segítségével d. A táblázatban szereplő adatok alapján
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
GÉPÉSZETI ALAPISMERETEK TÉMAKÖRÖK
 GÉPÉSZETI ALAPISMERETEK KÖZÉPSZINTŰ ÉRETTSÉGI TÉMAKÖRÖK Preisz Csaba mérnök-tanár Műszaki mechanika Statikai alapfogalmak - Erőrendszer fogalma - Vektorokkal végezhető alapműveleteket (erők felbontása,
GÉPÉSZETI ALAPISMERETEK KÖZÉPSZINTŰ ÉRETTSÉGI TÉMAKÖRÖK Preisz Csaba mérnök-tanár Műszaki mechanika Statikai alapfogalmak - Erőrendszer fogalma - Vektorokkal végezhető alapműveleteket (erők felbontása,
A gumiabroncsok szerepe a közlekedésbiztonságban
 A gumiabroncsok szerepe a közlekedésbiztonságban A MICHELIN Csoport A kezdetek 1889: Michelin cég alapítása 1891: leszerelhető kerékpár abroncs 1895: először szerel a Michelin levegővel fújt gumiabroncsot
A gumiabroncsok szerepe a közlekedésbiztonságban A MICHELIN Csoport A kezdetek 1889: Michelin cég alapítása 1891: leszerelhető kerékpár abroncs 1895: először szerel a Michelin levegővel fújt gumiabroncsot
Kinematika szeptember Vonatkoztatási rendszerek, koordinátarendszerek
 Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Kinematika 2014. szeptember 28. 1. Vonatkoztatási rendszerek, koordinátarendszerek 1.1. Vonatkoztatási rendszerek A test mozgásának leírása kezdetén ki kell választani azt a viszonyítási rendszert, amelyből
Végeselem analízis. 1. el adás
 Végeselem analízis 1. el adás Pere Balázs Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2016. szeptember 7. Mi az a VégesElem Analízis (VEA)? Parciális dierenciálegyenletek (egyenletrendszerek)
Végeselem analízis 1. el adás Pere Balázs Széchenyi István Egyetem, Alkalmazott Mechanika Tanszék 2016. szeptember 7. Mi az a VégesElem Analízis (VEA)? Parciális dierenciálegyenletek (egyenletrendszerek)
3. A szárnyas hajók stabilitása. a) A stabilitásról általában
 A stabilitásról általában") Jereb Gábor Szárnyas Hajók Új technika sorozat 3. A szárnyas hajók stabilitása a) A stabilitásról általában A hajó stabilitása alatt azt az ellenállást értjük, amelyet az egyensúlyi helyzet valamilyen
Jereb Gábor Szárnyas Hajók Új technika sorozat 3. A szárnyas hajók stabilitása a) A stabilitásról általában A hajó stabilitása alatt azt az ellenállást értjük, amelyet az egyensúlyi helyzet valamilyen
Tipikus fa kapcsolatok
 Tipikus fa kapcsolatok Dr. Koris Kálmán, Dr. Bódi István BME Hidak és Szerkezetek Tanszék 1 Gerenda fal kapcsolatok Gerenda feltámaszkodás 1 Vízszintes és (lefelé vagy fölfelé irányuló) függőleges terhek
Tipikus fa kapcsolatok Dr. Koris Kálmán, Dr. Bódi István BME Hidak és Szerkezetek Tanszék 1 Gerenda fal kapcsolatok Gerenda feltámaszkodás 1 Vízszintes és (lefelé vagy fölfelé irányuló) függőleges terhek
Milyen el?nyt jelenthet a Lotus E21 nagyobb tengelytávja Spában?
 Milyen el?nyt jelenthet a Lotus E21 nagyobb tengelytávja Spában? by Papp István - hétf?, augusztus 19, 2013 http://www.formula1tech.hu/milyen-elonyt-jelenthet-a-lotus-e21-nagyobb-tengelytavja-spaban/ E21-es
Milyen el?nyt jelenthet a Lotus E21 nagyobb tengelytávja Spában? by Papp István - hétf?, augusztus 19, 2013 http://www.formula1tech.hu/milyen-elonyt-jelenthet-a-lotus-e21-nagyobb-tengelytavja-spaban/ E21-es
205 00 00 00 Mûszertan
 1. oldal 1. 100710 205 00 00 00 Mûszertan A sebességmérõ olyan szelencés mûszer, mely nyitott Vidi szelence segítségével méri a repülõgép levegõhöz viszonyított sebességét olyan szelencés mûszer, mely
1. oldal 1. 100710 205 00 00 00 Mûszertan A sebességmérõ olyan szelencés mûszer, mely nyitott Vidi szelence segítségével méri a repülõgép levegõhöz viszonyított sebességét olyan szelencés mûszer, mely
Fizika feladatok - 2. gyakorlat
 Fizika feladatok - 2. gyakorlat 2014. szeptember 18. 0.1. Feladat: Órai kidolgozásra: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel s 1 utat, második szakaszában
Fizika feladatok - 2. gyakorlat 2014. szeptember 18. 0.1. Feladat: Órai kidolgozásra: Mekkora az átlagsebessége annak pontnak, amely mozgásának első szakaszában v 1 sebességgel s 1 utat, második szakaszában
EGON VON RUVILLE GmbH Billbrookdeich Hamburg Germany Tel.: +49 (0) Fax: +49 (0)
 Fax: +49 (0)") EGON VON RUVILLE GmbH Billbrookdeich 112 22113 Hamburg Germany Tel.: +49 (0)40 73344-0 Fax: +49 (0)40 73344-199 info@ruville.de www.ruville.de 75/053 R338/1.0/10.2009/MA-HUN MOTOR FUTÓMŰ SZERVIZ KOMPETENCIA
EGON VON RUVILLE GmbH Billbrookdeich 112 22113 Hamburg Germany Tel.: +49 (0)40 73344-0 Fax: +49 (0)40 73344-199 info@ruville.de www.ruville.de 75/053 R338/1.0/10.2009/MA-HUN MOTOR FUTÓMŰ SZERVIZ KOMPETENCIA
A dinamikus geometriai rendszerek használatának egy lehetséges területe
 Fejezetek a matematika tanításából A dinamikus geometriai rendszerek használatának egy lehetséges területe Készítette: Harsányi Sándor V. matematika-informatika szakos hallgató Porcsalma, 2004. december
Fejezetek a matematika tanításából A dinamikus geometriai rendszerek használatának egy lehetséges területe Készítette: Harsányi Sándor V. matematika-informatika szakos hallgató Porcsalma, 2004. december
Rezgőmozgás. A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele
 Rezgőmozgás A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele A rezgés fogalma Minden olyan változás, amely az időben valamilyen ismétlődést mutat rezgésnek nevezünk. A rezgések fajtái:
Rezgőmozgás A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele A rezgés fogalma Minden olyan változás, amely az időben valamilyen ismétlődést mutat rezgésnek nevezünk. A rezgések fajtái:
Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja. Készítette: Vidovics Lajos
 Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja Készítette: Vidovics Lajos Hajtáslánc építés fázisai irodalomkutatás, hajtáslánc koncepciók képzése, pneumatikus elemek kiválasztása,
Pneumatikus hajtású jármű hajtásláncának megtervezése és optimalizációja Készítette: Vidovics Lajos Hajtáslánc építés fázisai irodalomkutatás, hajtáslánc koncepciók képzése, pneumatikus elemek kiválasztása,
Statikai egyensúlyi egyenletek síkon: Szinusztétel az CB pontok távolságának meghatározására: rcb
 MECHNIK-STTIK (ehér Lajos) 1.1. Példa: Tehergépkocsi a c b S C y x G d képen látható tehergépkocsi az adott pozícióban tartja a rakományt. dott: 3, 7, a 3 mm, b mm, c 8 mm, d 5 mm, G 1 j kn eladat: a)
MECHNIK-STTIK (ehér Lajos) 1.1. Példa: Tehergépkocsi a c b S C y x G d képen látható tehergépkocsi az adott pozícióban tartja a rakományt. dott: 3, 7, a 3 mm, b mm, c 8 mm, d 5 mm, G 1 j kn eladat: a)
Gyakorlati útmutató a Tartók statikája I. tárgyhoz. Fekete Ferenc. 5. gyakorlat. Széchenyi István Egyetem, 2015.
 Gyakorlati útmutató a tárgyhoz Fekete Ferenc 5. gyakorlat Széchenyi István Egyetem, 015. 1. ásodrendű hatások közelítő számítása A következőkben egy, a statikai vizsgálatoknál másodrendű hatások közelítő
Gyakorlati útmutató a tárgyhoz Fekete Ferenc 5. gyakorlat Széchenyi István Egyetem, 015. 1. ásodrendű hatások közelítő számítása A következőkben egy, a statikai vizsgálatoknál másodrendű hatások közelítő
A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN
 A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN Egy testre ható erő, a más testekkel való kölcsönhatás mértékére jellemző fizikai mennyiség. A légkörben ható erők Külső erők: A Föld tömegéből következő
A LÉGKÖRBEN HATÓ ERŐK, EGYENSÚLYI MOZGÁSOK A LÉGKÖRBEN Egy testre ható erő, a más testekkel való kölcsönhatás mértékére jellemző fizikai mennyiség. A légkörben ható erők Külső erők: A Föld tömegéből következő
A sok jelzőtábla zavaró. Dr. Debreczeni Gábor előadása
 A sok jelzőtábla zavaró A jelzőtáblák mérete 4/2001. (I.31.) KöVim rendelet A jellemző méret 450 mm 600 mm 750 mm 900 mm 1000 mm A közlekedő személy segítése A pálya legyen egyszerű, egységes, akadálymentes,
A sok jelzőtábla zavaró A jelzőtáblák mérete 4/2001. (I.31.) KöVim rendelet A jellemző méret 450 mm 600 mm 750 mm 900 mm 1000 mm A közlekedő személy segítése A pálya legyen egyszerű, egységes, akadálymentes,
EGY ABLAK - GEOMETRIAI PROBLÉMA
 EGY ABLAK - GEOMETRIAI PROBLÉMA Írta: Hajdu Endre A számítógépemhez tartozó két hangfal egy-egy négyzet keresztmetszetű hasáb hely - szűke miatt az ablakpárkányon van elhelyezve (. ábra).. ábra Hogy az
EGY ABLAK - GEOMETRIAI PROBLÉMA Írta: Hajdu Endre A számítógépemhez tartozó két hangfal egy-egy négyzet keresztmetszetű hasáb hely - szűke miatt az ablakpárkányon van elhelyezve (. ábra).. ábra Hogy az
28. Nagy László Fizikaverseny Szalézi Szent Ferenc Gimnázium, Kazincbarcika február 28. március osztály
 1. feladat a) A négyzet alakú vetítővászon egy oldalának hossza 1,2 m. Ahhoz, hogy a legnagyobb nagyításban is ráférjen a diafilm-kocka képe a vászonra, és teljes egészében látható legyen, ahhoz a 36 milliméteres
1. feladat a) A négyzet alakú vetítővászon egy oldalának hossza 1,2 m. Ahhoz, hogy a legnagyobb nagyításban is ráférjen a diafilm-kocka képe a vászonra, és teljes egészében látható legyen, ahhoz a 36 milliméteres
Mérnöki alapok 4. előadás
 Mérnöki alapok 4. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80
Mérnöki alapok 4. előadás Készítette: dr. Váradi Sándor Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Hidrodinamikai Rendszerek Tanszék, Budapest, Műegyetem rkp. 3. D ép. 334. Tel: 463-6-80
203 00 00 00 Szerkezettan
 1. oldal 1. 100870 203 00 00 00 Szerkezettan A faanyagokat környezeti hatások nem károsítják, nem igényelnek kezelést. 2. 100871 203 00 00 00 Szerkezettan A szálerõsítésû mûanyagok nagy szilárdságú szálakból
1. oldal 1. 100870 203 00 00 00 Szerkezettan A faanyagokat környezeti hatások nem károsítják, nem igényelnek kezelést. 2. 100871 203 00 00 00 Szerkezettan A szálerõsítésû mûanyagok nagy szilárdságú szálakból
2. Rugalmas állandók mérése
 2. Rugalmas állandók mérése Klasszikus fizika laboratórium Mérési jegyzőkönyv Mérést végezte: Vitkóczi Fanni Jegyzőkönyv leadásának időpontja: 2012. 12. 15. I. A mérés célja: Két anyag Young-modulusának
2. Rugalmas állandók mérése Klasszikus fizika laboratórium Mérési jegyzőkönyv Mérést végezte: Vitkóczi Fanni Jegyzőkönyv leadásának időpontja: 2012. 12. 15. I. A mérés célja: Két anyag Young-modulusának
A nagyobb tömegű Peti 1,5 m-re ült a forgástengelytől. Összesen: 9p
 Jedlik 9-10. o. reg feladat és megoldás 1) Egy 5 m hosszú libikókán hintázik Évi és Peti. A gyerekek tömege 30 kg és 50 kg. Egyikük a hinta végére ült. Milyen messze ült a másik gyerek a forgástengelytől,
Jedlik 9-10. o. reg feladat és megoldás 1) Egy 5 m hosszú libikókán hintázik Évi és Peti. A gyerekek tömege 30 kg és 50 kg. Egyikük a hinta végére ült. Milyen messze ült a másik gyerek a forgástengelytől,
Ábragyűjtemény levelező hallgatók számára
 Ábragyűjtemény levelező hallgatók számára Ez a bemutató a tanszéki Fizika jegyzet kiegészítése Mechanika I. félév 1 Stabilitás Az úszás stabilitása indifferens a stabil, b labilis S súlypont Sf a kiszorított
Ábragyűjtemény levelező hallgatók számára Ez a bemutató a tanszéki Fizika jegyzet kiegészítése Mechanika I. félév 1 Stabilitás Az úszás stabilitása indifferens a stabil, b labilis S súlypont Sf a kiszorított
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
ÁGAZATI SZAKMAI ÉRETTSÉGI VIZSGA KÖZLEKEDÉSÉPÍTŐ ISMERETEK KÖZÉPSZINTŰ ÍRÁSBELI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ A MINTAFELADATOKHOZ
 KÖZLEKEDÉSÉPÍTŐ SMERETEK KÖZÉPSZNTŰ ÍRÁSBEL VZSGA JAVÍTÁS-ÉRTÉKELÉS ÚTMUTATÓ A MNTAFELADATOKHOZ Rövid választ igénylő feladatok 1. feladat 2 pont Az alábbi igaz vagy hamis állítások közül válassza ki a
KÖZLEKEDÉSÉPÍTŐ SMERETEK KÖZÉPSZNTŰ ÍRÁSBEL VZSGA JAVÍTÁS-ÉRTÉKELÉS ÚTMUTATÓ A MNTAFELADATOKHOZ Rövid választ igénylő feladatok 1. feladat 2 pont Az alábbi igaz vagy hamis állítások közül válassza ki a
2. A gépkocsi vezetése
 2. A gépkocsi vezetése 1. Általában balról jobbra milyen sorrendben találjuk a gépkocsiban a gáz-, fékés a tengelykapcsoló pedálokat? a) Gáz fék tengelykapcsoló. b) Tengelykapcsoló fék gáz. c) Fék gáz
2. A gépkocsi vezetése 1. Általában balról jobbra milyen sorrendben találjuk a gépkocsiban a gáz-, fékés a tengelykapcsoló pedálokat? a) Gáz fék tengelykapcsoló. b) Tengelykapcsoló fék gáz. c) Fék gáz
H01 TEHERAUTÓ ÉS BUSZMODELL SZÉLCSATORNA VIZSGÁLATA
 H01 TEHERAUTÓ ÉS BUSZMODELL SZÉLCSATORNA VIZSGÁLATA 1. A mérés célja A mérési feladat moduláris felépítésű járműmodellen a c D ellenállástényező meghatározása különböző kialakítások esetén, szélcsatornában.
H01 TEHERAUTÓ ÉS BUSZMODELL SZÉLCSATORNA VIZSGÁLATA 1. A mérés célja A mérési feladat moduláris felépítésű járműmodellen a c D ellenállástényező meghatározása különböző kialakítások esetén, szélcsatornában.
Gépjármű Diagnosztika. Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet
 Gépjármű Diagnosztika Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet 8. Előadás Futómű diagnosztika Miért fontos, mi a jelentősége? A futómű-diagnosztika közlekedésbiztonsági
Gépjármű Diagnosztika Szabó József Zoltán Főiskolai adjunktus BMF Mechatronika és Autótechnika Intézet 8. Előadás Futómű diagnosztika Miért fontos, mi a jelentősége? A futómű-diagnosztika közlekedésbiztonsági
Mérések állítható hajlásszögű lejtőn
 A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
A bifiláris felfüggesztésű rúd mozgásáról
 1 A bifiláris felfüggesztésű rúd mozgásáról A végein fonállal felfüggesztett egyenes rúd részleges erőtani vizsgálatát mutattuk be egy korábbi dolgozatunkban, melynek címe: Forgatónyomaték mérése - I.
1 A bifiláris felfüggesztésű rúd mozgásáról A végein fonállal felfüggesztett egyenes rúd részleges erőtani vizsgálatát mutattuk be egy korábbi dolgozatunkban, melynek címe: Forgatónyomaték mérése - I.
Járműelemek. Rugók. 1 / 27 Fólia
 Rugók 1 / 27 Fólia 1. Rugók funkciója A rugók a gépeknek és szerkezeteknek olyan különleges elemei, amelyek nagy (ill. korlátozott) alakváltozás létrehozására alkalmasak. Az alakváltozás, szemben más szerkezeti
Rugók 1 / 27 Fólia 1. Rugók funkciója A rugók a gépeknek és szerkezeteknek olyan különleges elemei, amelyek nagy (ill. korlátozott) alakváltozás létrehozására alkalmasak. Az alakváltozás, szemben más szerkezeti
Komplex természettudomány 3.
 Komplex természettudomány 3. 1 A lendület és megmaradása Lendület (impulzus): A test tömegének és sebességének a szorzata. Jele: I. Képlete: II = mm vv mértékegysége: kkkk mm ss A lendület származtatott
Komplex természettudomány 3. 1 A lendület és megmaradása Lendület (impulzus): A test tömegének és sebességének a szorzata. Jele: I. Képlete: II = mm vv mértékegysége: kkkk mm ss A lendület származtatott
A forgalomsűrűség és a követési távolság kapcsolata
 1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
1 A forgalomsűrűség és a követési távolság kapcsolata 6 Az áramlatsűrűség (forgalomsűrűség) a követési távolsággal ad egyértelmű összefüggést: a sűrűség reciprok értéke a(z) (átlagos) követési távolság.
A fényvisszaverő kontúrjelölés magyarországi bevezetéséről a július 10. után először forgalomba helyezett (új) járművek esetében
 járművek esetében") A fényvisszaverő kontúrjelölés magyarországi bevezetéséről a 2011. július 10. után először forgalomba helyezett (új) járművek esetében (Tájékoztató jogszabálykivonat) Az A. Függelék A/20. számú melléklete
A fényvisszaverő kontúrjelölés magyarországi bevezetéséről a 2011. július 10. után először forgalomba helyezett (új) járművek esetében (Tájékoztató jogszabálykivonat) Az A. Függelék A/20. számú melléklete