Bencsik Attila L. főiskolai tanár egyetemi docens. Óbudai Egyetem Mechatronikai és Autótechnikai Intézet
|
|
|
- Natália Magda Somogyiné
- 9 évvel ezelőtt
- Látták:
Átírás
1 Bencsik Attila L. főiskolai tanár egyetemi docens Óbudai Egyetem Mechatronikai és Autótechnikai Intézet

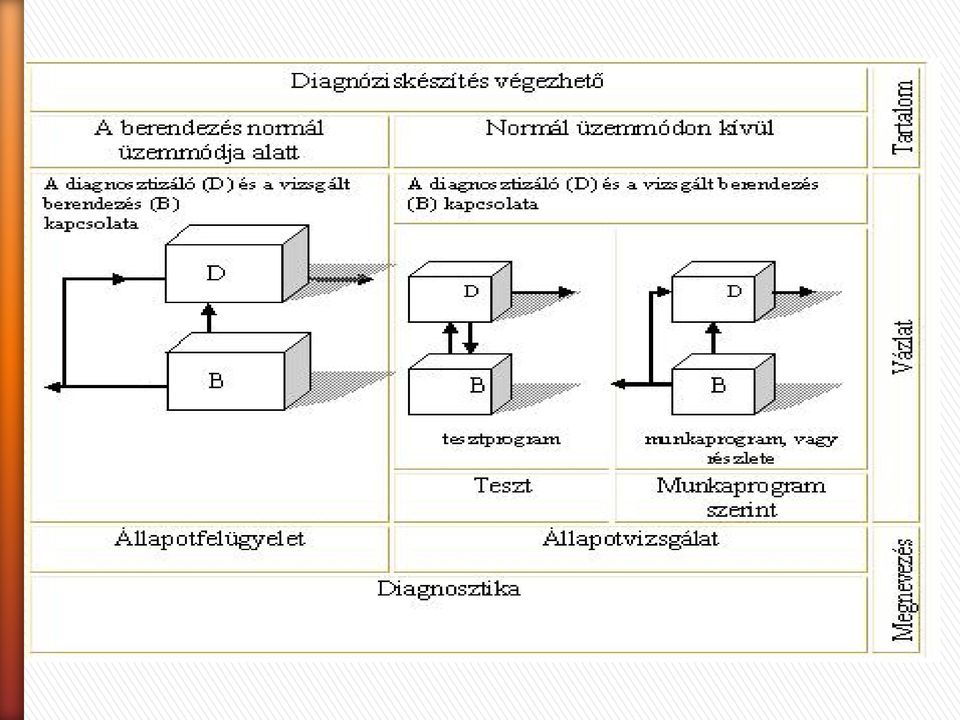
2 » A diagnosztika felosztása Állapotvizsgálat + Munkaprogram szerinti vizsgálat + Teszt vizsgálat

3
4 Pozícionálási pontosság Vissza Játszási pontosság Előírt pozíció Tanítás Tanítási pontosság Tanított pozíció Visszajátszás Elért pozíció Ismétlőképességi

5 Pozicionálási pontossági vizsgálat

6 Állapotvizsgálat: Munkaprogram szerinti vizsgálat PONTOSSÁG A GEOMETRIAI PONTOSSÁG A1 HELYZETBEÁLLÁSI PONTOSSÁG A1.1 POZÍCIONÁLÁSI PONTOSSÁG A1.2 ORIENTÁCIÓS PONTOSSÁG A2 PÁLYAMENTI PONTOSSÁG A2.1 PÁLYAKÖVETÉSI PONTOSSÁG A2.2 PÁLYAMENTI ORIENTÁCIÓS PONTOSSÁG B KINEMATIKAI PONTOSSÁG C KINETIKAI PONTOSSÁG D DINAMIKAI PONTOSSÁG

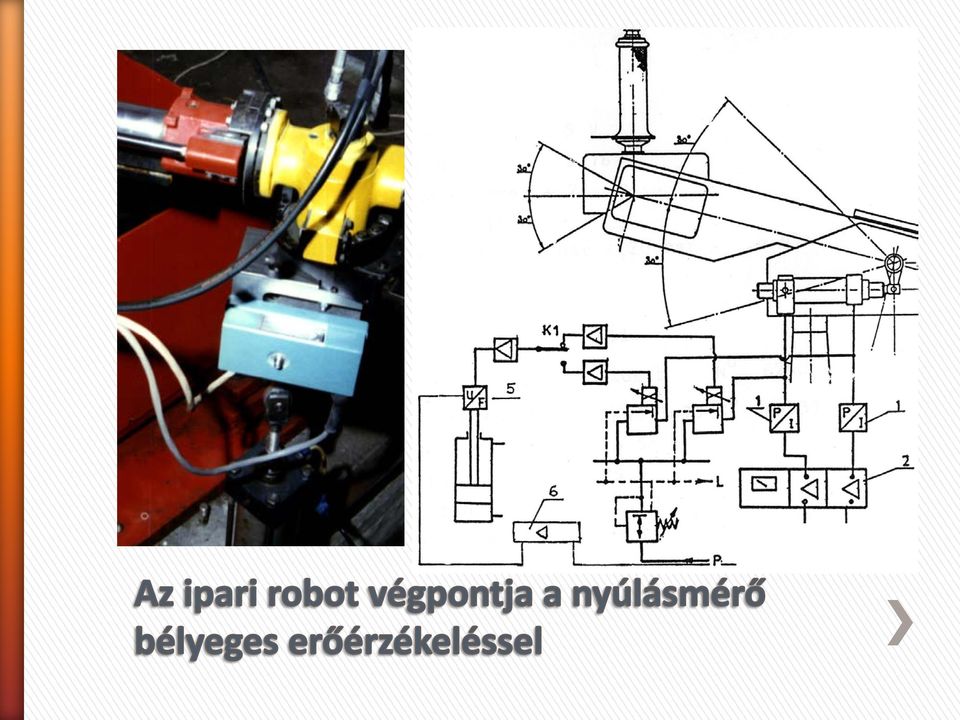
7 » Robot hajtás vizsgálat

8

9
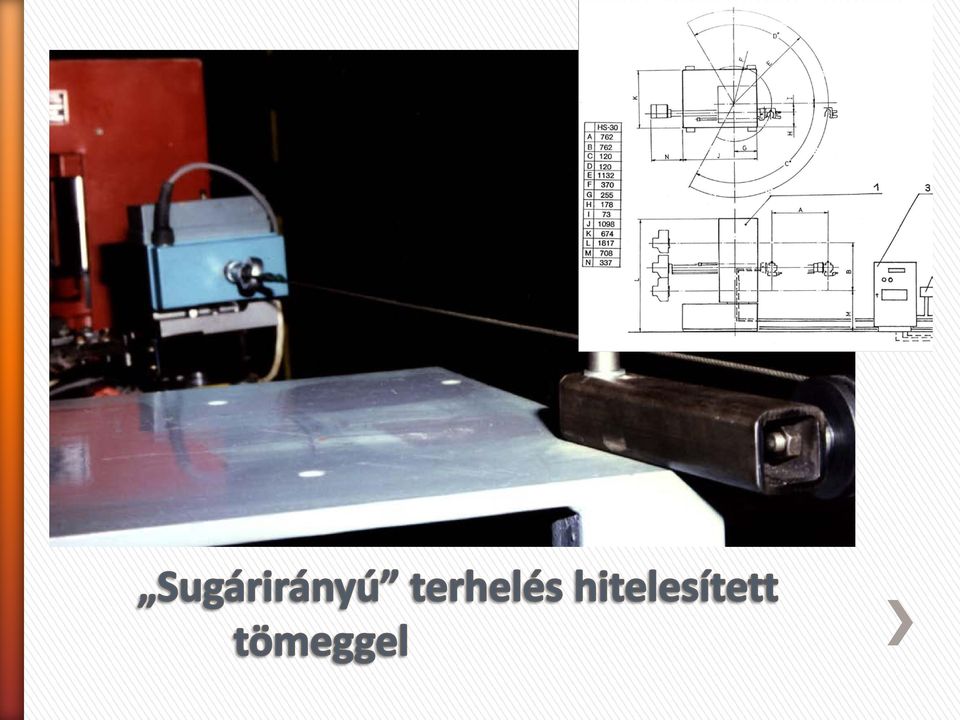
10 Az állványon került elhelyezésre a terhelést végző pneumatikus munkahenger (középen) és a súly terhelést közvetítő görgője (felül).

11 A függőleges mozgatás erő terhelését végző munkahengeren jól látható a kifolyóági fojtás

12
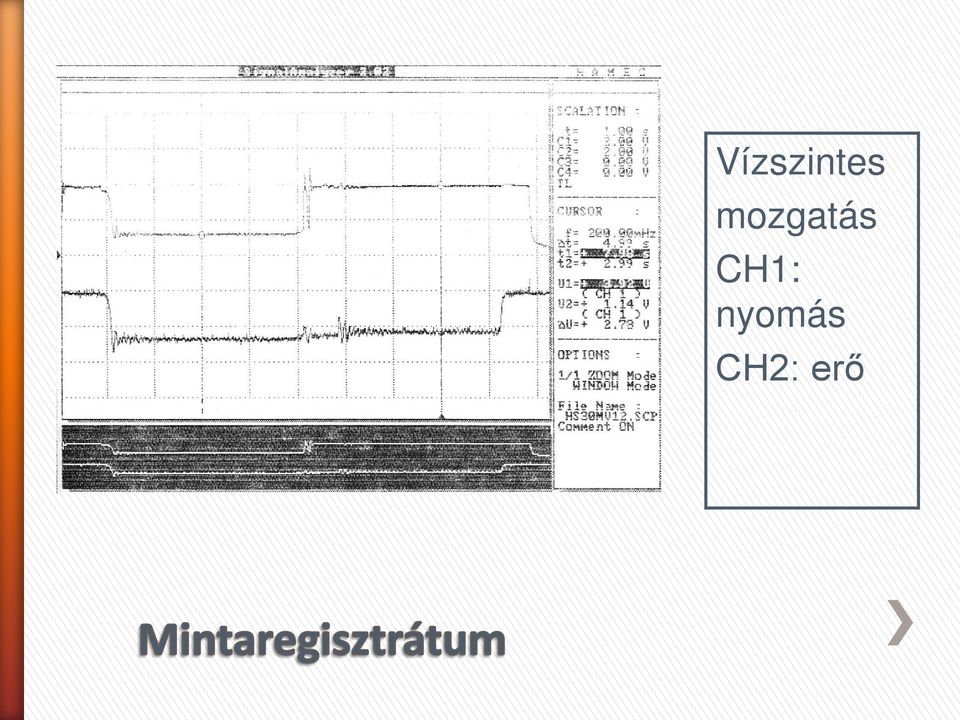
13 » Mind a függőleges, mind a vízszintes mozgatási iránynál a méréseket úgy végeztük, hogy a mesterkart kézzel mozgatva előbb az egyik, majd irányváltást követően a másik irányba mozgattuk a robot-manipulátort. Megjegyzés A regisztrátumokon jól látszanak az irányváltáskor keletkező mechanikai lengések, melyek természetesen visszahatnak a mesterkarra is. A súly terheléssel végzett mérések a teher letételével fejeződtek be. A mérési regisztrátumokon az is látszik, hogy mikor kapcsoltuk be ill. ki a mesterkar kézi megfogójának végpontján elhelyezett nyomógombbal a nyomás érzetet.

14 A regisztrátumok közvetlenül értékelhetők, hiszen» a robot-manipulátor végpontján érzékelt erő jele került rögzítésre az egyik csatornán.» A másik csatornán az erőérzet keltő hidraulikus munkahenger - mely a mesterkaron található - aktív (vagyis proporcionális szelep által vezérelt) munkaterének nyomásértékét regisztráltuk. Megjegyzés: A nem aktív (az erőérzet keltő munkahenger másik tere) munkahenger-térben ilyenkor az elektronikus egység a nyomás működési tartományának középértékén tartja a nyomást.
 munkaterének nyomásértékét regisztráltuk.")
15 Vízszintes mozgatás CH1: nyomás CH2: erő
16 Függőleges mozgatás Erőérzet be, G fel, irányváltás, G le, Erőérzet ki. (G=100N)

17 » A mellékelt minta regisztrátumokból egyértelműen kitűnik, hogy az erővisszajelzéses mesterkar közvetett erőérzet keltése jól követi a robot-manipulátor kar végpontján ébredő erőt.» Bár kismértékben megfigyelhető az elektronikus hidraulikus, rendszer holtidős tagként történő viselkedése, de ez véleményünk szerint egy ember által vezérelt teleoperációs rendszernél, ahol az ember reakció ideje nagyságrenddel nagyobb (az általánosan elfogadott 1 sec-ot figyelembevéve), ez elhanyagolható.» A vizsgálati eredményekből az is kitűnik, hogy a közepes frekvencia tartományban keletkező dinamikus gerjesztés ezen összetett elektronikus hidraulikus mechanikus rendszer némiképp csillapítja.» Ez a jelenség végeredményben kedvező, hiszen a teleoperációt végző személy számára ha nem rendelkezne a rendszer a fentebb leirt tulajdonsággal - akkor is ezt ergonómiai okok miatt szoftveresen célszerű lenne beépíteni.

18 » Statikus merevség vizsgálat» Dinamikus merevség vizsgálat

19 Statikus merevség vizsgálat c F,, = XYZ d XYZ,, N mm g = d F XYZ,, XYZ,, µ m N

20 A dinamikus merevség vizsgálat ( jω) ( jω) F C ( jω) = C( f ) = D F( f ) D( f ) összefüggéssel adható meg. Ahol: j = 1 ω = a gerjesztő erő illetve a létrejövő dinamikus deformáció körfrekvenciája, f = a gerjesztő erő illetve a létrejövő dinamikus deformáció frekvenciája, F = a gerjesztő erő, [ N ] [ Hz]

21 » A dinamikus deformáció mérése általában csak közvetve lehetséges, a könnyen mérhető gyorsulásjel kétszeres integrációjával. A torzítások elkerüléséért sokszor elhagyják az integrálást és az ún. dinamikus inertanciát mérik; ( jω) ( jω) a I ( jω) = I( f ) = F a F ( f ) ( f ) a» ahol: a gerjesztés hatására létrejövő gyorsulás
22 1 robotkarvég 2 terhelésközvetítő készülék 3 piezo erőmérő cella 4 előfeszítő betét 5 ütő kalapács 6 ütőbetét 7 integráló töltéserősítő 8 töltéserősítő erőmérő cellához 9 mérőmagnetofon 10 FFT analizátor 11 Számítógép 12 nyomtató
23
24 » - A gerjesztő erőjelet lehetőleg minél jobban a Dirac impulzus jelalakra kell hozni. A visszapattanások és lecsengések kiszűrésére az erőjelnél un. (flat) négyszögablakot kell használni. A válaszjelet viszont exponenciális szűrésnek kell alávetni, hogy a lecsengés utáni jelek a Fourier-transzformációnál ne okozzanak torzítást.» Az erőjel természetesen nem elégítheti ki a Dirac impulzus feltételeit és így csak meghatározott frekvenciáig jelent a spektrumban egyenletes gerjesztést. Az ütésjel frekvenciaspektrumát képezve megállapítottuk, hogy a legfontosabb Hz-es sávban a gerjesztő erő spektruma egyenletesnek fogadható el, mivel 122 Hz-nél is még kisebb volt a szintesés mint 3 db. (3. ábra)
25 » Mivel az erőjel spektruma igen egyenletes, ezért a gyorsulásválasz és a dinamikai inertancia függvénye szinte teljesen megegyezett. (4. ábra)
26
27 » A mérés megbízhatóságát az igen jónak nevezhető koherencia-függvény is jelezte.» A gyorsulás és inertancia jelekből kétszeres integrálással képeztük a kitérés válaszspektrumot és a dinamikai gyengeség függvényeit. A magasabb frekvenciákon egyértelműen megfigyelhető volt az amplitúdó-vágás. Mivel ez már a robot működésének szempontjából fontos, alacsony frekvenciákon is elég jelentős, ezért a későbbiekben a kritikus sajátfrekvenciákat elsősorban a dinamikai inertancia függvényekből célszerű kiolvasni.» A a gumi és a danamid ütőbetéttel végzett gerjesztés eredményeit hasonlítva egyértelműen megállapítható volt, hogy a danamid-betét az alacsonyabb frekvenciás csúcsokat elmossa, azonosíthatatlanná teszi.» Mivel a robot működése szempontjából ez az igazán érdekes frekvenciatartomány, a robotvizsgálatoknál a gumi betétet használtunk.
28 » Ipari robot kar és a rázóasztal» Mérési összeállítás» Rázóasztal"
29 1. Az iparban elterjedt robotokkal» a feladatok széles skálája megoldható,» egyszerűsítő megkötések tehetők,» Az általános ipari gyakorlatban nem merül fel az emberi készségekkel összevethető szintű intelligencia igénye
30 2. Ipari technológiai feladatainkban» látás-izommozgás-erőkifejtés koordinációs képességeit teljesen automatizálni nehéz,» mesterkarral vezérelt manipulátorok alkalmazásánál a szolga manipulátor nagy fizikai ereje ötvözhető» az irányítási feladatra sokkal alkalmasabb emberi készségekkel» olcsóbban lehet eredményt elérni, mint a tisztán gépi intelligenciával
31 A technológiailag igényelt ún. erő-pozíció kontrol azon a felismerésen alapul, amely szerint egy munkadarab felületével érintkező szerszám pozíciója nem írható elő pontosan, csupán annak a felület érintősíkjában elhelyezkedő komponensei. Hasonló módon, a felületre ható erőnek az érintősík normálisával párhuzamos komponense írható elő tetszőlegesen. Nyomatékszabályozású vezérlés esetén e két egymásra ortogonális komponens elválasztható egymástól (ún. feladatspecifikációs mátrix technika).
32 Míg a normális irányú erőkomponens értékét a technológiai előírás szerint megadják,» a pozícióbeállításhoz egy rúgóállandó,» egy sebességeltéréssel arányos csillapítás és» egy inerciajellegű mátrix megadásával oszcillációmentes aszimptotikus beállást eredményező erőket/nyomatékokat írnak elő a maradék pozíciókomponensek beállítására, ahol is a pontos beállásnál a többlet nyomatékok/erők zérus értékűek (ún. Impedance Control, amelyben nem szükséges lokális erőszenzorok alkalmazása.
33 Összefoglalva a feladat ilyen megközelítése a következő gyakorlati nehézségekkel jár:» pontosan ismerni kell a munkadarab felületének és a robot által fogott szerszám végpontjának elhelyezkedését, és ezeket matematikailag vagy kiegészítő képfelismerő rendszer alkalmazásával le kell írni a vezérlés számára;» ha ez előre nem ismert, a kontakt erők ugyan mérhetők szenzorokkal, azonban a súrlódás miatt ebből az erőből nem állapítható meg a felület normálisa (ún. Active Compliance Control ) ;» a súrlódás okozta megcsúszás jelensége és az ezzel ugrásszerűen változó súrlódási együttható nehezen kezelhető a vezérlés által;
34 » a gravitációs járulék csak akkor lenne leválasztható a kontakt erőkről, ha a mozgatott munkadarab/szerszám tömege elhanyagolható lenne a szolga manipulátor kar tömege illetve inerciaadatai mellett; ez azt jelenti, olyan vezérlést kellene megvalósítani, amely adaptív a munkadarabra ható gravitációs és kontakt erők szétválasztásában;» a mester-szolga rendszernek gyakorta változó struktúráltságú környezetben (pl. daru vezérlése különböző építési helyszíneken, stb.) kell működnie; e környezet felismerése és a benne való tájékozódás olyan adaptív intelligencia meglétét tételezi fel, amelyekkel már az egyszerűbb élőlények is rendelkeznek, míg gépi megvalósításuk roppant bonyolult, és költséges.
35 Érzékelés» az emberi kar, mint szenzor az izomfeszültség, valamint a kar törzshöz viszonyított mozgásának érzékelésére Hz tartományig» taktilis érzékelés esetén 320 Hz értékig (vibrációk, nyomófeszültségek) képes kielégítő érzékelésre
36 Feladat» a külső kontakt erők hiányát könnyű biztosítani úgy, hogy a megfigyelő szemmel ellenőrzi: hozzáér-e a manipulátorral mozgatott szerszám a környezetéhez; (ilyenkor maradó gravitációs erők/nyomatékok alapján ugyanúgy megtanulható a rendszer önsúlyának hatása, mint ahogy egy élőlény megtanul állni vagy bizonyos tárgyakat jól megfogva egyensúlyban tartani)» a vezérlésnek több szempontból is adaptívnak kell lennie:» a hordott munkadarab súlyától is függ a gravitációs rész;
37 Végrehajtás» a kontakt F erők és M nyomatékok mindig az adott feladattól függnek és szoros csatolás is kialakulhat köztük (pl. aszimmetrikusan megfogott gerenda két végén akad; az egyensúly ekkor különböző nagyságú kontakt erők mellett is fenntartható a velük arányosan növelt forgatónyomaték mellett stb.);» az emberi karizmoknak egy eredő transzlációs, rotációs és gravitációs mátrixokkal jellemezhető dinamikai rendszert kell megtanulniuk kezelni;» az adott dinamikai rendszerhez egy eredő r(u), O(u) kinematikai rendszer tartozik, amely a szolga rendszer mozgását közvetlenül figyelve hasonlóan megtanulható, mint például az autóvezetés
38 Előnyök» bár a rendszer kezelésének megtanulási folyamatát gyorsíthatja, ha a mester kar geometriai értelemben azonos vagy hasonló a szolga karhoz, lehetséges, hogy egy adott geometriai szerkezetű mesterkarral attól jelentősen különböző szerkezetű szolga manipulátor irányítása is megoldható;» az irányítást végző személynek csak egyszer kell megtanulnia egy adott mester - szolga rendszer eredő jellemzőit;
39 Előnyök (folytatás) (Ez a tudás automatikusan alkalmazható ugyanúgy, ahogy egy biológiai rendszer a saját jellemzőinek ismeretében különböző súlyú és méretű tárgyak biztonságos manipulálására is alkalmas.)» az adott mester-szolga rendszer kezelésének megtanulása és alkalmazása lényegesen egyszerűbb, mint a hagyományos, csak bizonyos szabadságfokok adott sebességű mozgását vagy megállítását lehetővé tevő közönséges kapcsolókból álló elektromos vagy hidraulikus rendszerek irányításának elsajátítása.
40 A mesterkar behatárolható kvalitatív jellemzői: 1. Megfelelően intuitív irányíthatóság a felhasználó részéről» az adott manipulátorral megegyező szabadságfokok megléte;» a mesterkarhoz kötött vonatkoztatási rendszer könnyen legyen úgy beállítható, hogy a szolga munkatere és a végrehajtó személy testéhez kötött vonatkoztatási rendszer a megszokott kezelési pozícióba legyen állítható egymáshoz képest;» a mester-szolga együttes legyen olyan, hogy a mesterkar szabadságfokainak mozgatásával a szolga manipulátor térbeli mozgása viszonylag könnyen áttekinthetővé váljon;
41 2. Nagy megbízhatóságú erővisszajelzés» Kis időkésleltetéssel és egyértelműen generált erő illetve nyomaték visszajelzés minimális súrlódás okozta zavarokkal;» minimális saját tehetetlenséggel terhelt kezelés; 3. Megfelelő mechanikai konstrukció» megfelelő mechanikai szilárdság amely kellő frekvenciatartománybeli sávszélességet biztosít az operátor által kiadott parancsok átvitelére;
42 3. Megfelelő mechanikai konstrukció» lehetőleg egymással csatolatlan szabadsági fokok mellet egyszerű kinematikai struktúra megléte;» az operátort a lehető legkisebb, emberileg kellemesen érzékelhető, még nem kimerítő erőhatások terheljék;» a mester kar részéről az emberi kéz lehetőségeihez illeszkedő méretű és alakú munkatér megléte;» a kar megfelelő mechanikai kiegyensúlyozása;» megfelelő erő-, nyomaték- és pozíciófelbontás.
43 » a durva szabad mozgásszakasz működtetésére a gyakorlatban különféle hidraulikus szelepek is beváltak a különböző eszközök kézi vezérlésében,» a speciális geometriai leképezés hiánya áthidalható a vezérlő személy intelligenciája és vizuális készségei által.» célszerű a mesterkaroknál fenntartani egy geometriai leképezésre nem nagyon érzékeny joystick típusú funkciót ellátó üzemmódot.» Szervovezérléseknél érdemes mester szolga rendszert alkalmazni» Kényesebb technológiai feladatoknál erővisszajelzéses teleoperációs rendszert célszerű választani
44
45
46 » a mesterkar munkahengereit direkt csővezetékek köthetik össze a hidraulikus "slave" manipulátor megfelelő munkahengereivel vagy motorjaival, alkalmas nyomáscsillapító rendszer felhasználásával;» a slave kar csuklónyomatékait elektromos úton vezetjük, csatolhatjuk be mesterkar vezérlésébe a külső elektromos jellel arányos nyomást biztosító szelepek segítségével.
47
48
49
50
51 Az ábrán az un. indirekt erővisszajelzési módszer megoldásának rajzát láthatjuk két szabadságfok erőérzetének megvalósítására. Az M jelű szelepek az erőérzetet keltő kettős működésű hidraulikus hengerek lezárását illetve az A és B ág összekapcsolásával az erőérzet megszüntetését végzik.
52
53
Pneumatika az ipari alkalmazásokban
 Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Pneumatika az ipari alkalmazásokban Manipulátorok Balanszer technika Pneumatikus pozícionálás Anyagmozgatási és Logisztikai Rendszerek Tanszék Manipulátorok - Mechanikai struktúra vagy manipulátor, amely
Infobionika ROBOTIKA. X. Előadás. Robot manipulátorok II. Direkt és inverz kinematika. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
Infobionika ROBOTIKA X. Előadás Robot manipulátorok II. Direkt és inverz kinematika Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Direkt kinematikai probléma Denavit-Hartenberg konvenció
IPARI ROBOTOK. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
IPARI ROBOTOK, munkatértípusok 2. előadás Dr. Pintér József Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően meghatározza munkaterének alakját, a mozgási sebességét,
Tervezés katalógusokkal kisfeladat
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes tervezés, méretezés és gyártás (BME KOJHM401) Tervezés katalógusokkal kisfeladat Járműelemek és Járműszerkezetanalízis Tanszék Ssz.:...... Név:.........................................
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes tervezés, méretezés és gyártás (BME KOJHM401) Tervezés katalógusokkal kisfeladat Járműelemek és Járműszerkezetanalízis Tanszék Ssz.:...... Név:.........................................
TERVEZÉS KATALÓGUSOKKAL KISFELADAT
 Dr. Nyitrai János Dr. Nyolcas Mihály TERVEZÉS KATALÓGUSOKKAL KISFELADAT Segédlet a Jármű- és hajtáselemek III. tantárgyhoz Kézirat 2012 TERVEZÉS KATALÓGUSOKKAL KISFELADAT "A" típusú feladat: Pneumatikus
Dr. Nyitrai János Dr. Nyolcas Mihály TERVEZÉS KATALÓGUSOKKAL KISFELADAT Segédlet a Jármű- és hajtáselemek III. tantárgyhoz Kézirat 2012 TERVEZÉS KATALÓGUSOKKAL KISFELADAT "A" típusú feladat: Pneumatikus
Hibadetektáló rendszer légtechnikai berendezések számára
 Hibadetektáló rendszer légtechnikai berendezések számára Tudományos Diákköri Konferencia A feladatunk Légtechnikai berendezések Monitorozás Hibadetektálás Újrataníthatóság A megvalósítás Mozgásérzékelő
Hibadetektáló rendszer légtechnikai berendezések számára Tudományos Diákköri Konferencia A feladatunk Légtechnikai berendezések Monitorozás Hibadetektálás Újrataníthatóság A megvalósítás Mozgásérzékelő
ROBOTTECHNIKA. Kinematikai strukturák, munkatértípusok. 2. előadás. Dr. Pintér József
 ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
ROBOTTECHNIKA 2. előadás Kinematikai strukturák, munkatértípusok Dr. Pintér József Kinematikai strukturák Az ipari robotok kinematikai felépítése igen sokféle lehet. A kinematikai felépítés alapvetően
Szenzorcsatolt robot: A szenzorcsatolás lépései:
 1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
1. Mi a szenzorcsatolt robot, hogyan épül fel? Ismertesse a szenzorcsatolás lépéseit röviden az Egységes szenzorplatform architektúra segítségével. Mikor beszélünk szenzorfúzióról? Milyen módszereket használhatunk?
Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1
![Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1](/thumbs/45/23262384.jpg "Méréstechnika. Rezgésmérés. Készítette: Ángyán Béla. Iszak Gábor. Seidl Áron. Veszprém. [Ide írhatja a szöveget] oldal 1") Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Méréstechnika Rezgésmérés Készítette: Ángyán Béla Iszak Gábor Seidl Áron Veszprém 2014 [Ide írhatja a szöveget] oldal 1 A rezgésekkel kapcsolatos alapfogalmak A rezgés a Magyar Értelmező Szótár megfogalmazása
Rezgőmozgás. A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele
 Rezgőmozgás A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele A rezgés fogalma Minden olyan változás, amely az időben valamilyen ismétlődést mutat rezgésnek nevezünk. A rezgések fajtái:
Rezgőmozgás A mechanikai rezgések vizsgálata, jellemzői és dinamikai feltétele A rezgés fogalma Minden olyan változás, amely az időben valamilyen ismétlődést mutat rezgésnek nevezünk. A rezgések fajtái:
Mechanikai rezgések Ismétlő kérdések és feladatok Kérdések
 Mechanikai rezgések Ismétlő kérdések és feladatok Kérdések 1. Melyek a rezgőmozgást jellemző fizikai mennyiségek?. Egy rezgés során mely helyzetekben maximális a sebesség, és mikor a gyorsulás? 3. Milyen
Mechanikai rezgések Ismétlő kérdések és feladatok Kérdések 1. Melyek a rezgőmozgást jellemző fizikai mennyiségek?. Egy rezgés során mely helyzetekben maximális a sebesség, és mikor a gyorsulás? 3. Milyen
7. Koordináta méréstechnika
 7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
Hangfrekvenciás mechanikai rezgések vizsgálata
 Hangfrekvenciás mechanikai rezgések vizsgálata (Mérési jegyzőkönyv) Hagymási Imre 2007. május 7. (hétfő délelőtti csoport) 1. Bevezetés Ebben a mérésben a szilárdtestek rugalmas tulajdonságait vizsgáljuk
Hangfrekvenciás mechanikai rezgések vizsgálata (Mérési jegyzőkönyv) Hagymási Imre 2007. május 7. (hétfő délelőtti csoport) 1. Bevezetés Ebben a mérésben a szilárdtestek rugalmas tulajdonságait vizsgáljuk
Felső végükön egymásra támaszkodó szarugerendák egyensúlya
 1 Felső végükön egymásra támaszkodó szarugerendák egyensúlya Az [ 1 ] példatárban találtunk egy érdekes feladatot, melynek egy változatát vizsgáljuk meg itt. A feladat Ehhez tekintsük az 1. ábrát! 1. ábra
1 Felső végükön egymásra támaszkodó szarugerendák egyensúlya Az [ 1 ] példatárban találtunk egy érdekes feladatot, melynek egy változatát vizsgáljuk meg itt. A feladat Ehhez tekintsük az 1. ábrát! 1. ábra
Infobionika ROBOTIKA. IX. Előadás. Robot manipulátorok I. Alapfogalmak. Készült a HEFOP P /1.0 projekt keretében
 Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Infobionika ROBOTIKA IX. Előadás Robot manipulátorok I. Alapfogalmak Készült a HEFOP-3.3.1-P.-2004-06-0018/1.0 projekt keretében Tartalom Robot manipulátorok definíciója és alkalmazásai Manipulátorok szerkezete
Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések
 Záróvizsga orientáló kérdések") Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések 2015-2016. tanév 1. félévtől Összeállította: Dr. Németh István, Tóth András, Püspöki János Az orientáló kérdések célja
Szerszámgépek és ipari robotok (BMEGEGTMG02; 4 kr.) Záróvizsga orientáló kérdések 2015-2016. tanév 1. félévtől Összeállította: Dr. Németh István, Tóth András, Püspöki János Az orientáló kérdések célja
Erőművi turbina-generátor gépcsoportok rezgésdiagnosztikája
 Erőművi turbina-generátor gépcsoportok rezgésdiagnosztikája Kiss Attila 1. Bevezetés A rezgésdiagnosztika a forgógép karbantartás olyan ágazata, amely nagyon sokrétűen és dinamikusan fejlődik. A gyors
Erőművi turbina-generátor gépcsoportok rezgésdiagnosztikája Kiss Attila 1. Bevezetés A rezgésdiagnosztika a forgógép karbantartás olyan ágazata, amely nagyon sokrétűen és dinamikusan fejlődik. A gyors
2. E L Ő A D Á S D R. H U S I G É Z A
 Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
Mechatronika alapjai 2. E L Ő A D Á S D R. H U S I G É Z A elmozdulás erő nyomaték elmozdulás erő nyomaték Mechanizmusok Mechanizmus: általánosságban: A gép mechanikus elven működő részei Definíció: A
Ejtési teszt modellezése a tervezés fázisában
 Antal Dániel, doktorandusz, Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szabó Tamás, egyetemi docens, Ph.D., Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szilágyi Attila, egyetemi adjunktus,
Antal Dániel, doktorandusz, Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szabó Tamás, egyetemi docens, Ph.D., Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szilágyi Attila, egyetemi adjunktus,
6. MECHANIKA-STATIKA GYAKORLAT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya, Culmann-szerkesztés, Ritter-számítás
 ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
ZÉHENYI ITVÁN EGYETE GÉPZERKEZETTN É EHNIK TNZÉK 6. EHNIK-TTIK GYKORLT Kidolgozta: Triesz Péter egy. ts. Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa Egy létrát egy verembe letámasztunk
Mit nevezünk nehézségi erőnek?
 Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Mit nevezünk nehézségi erőnek? Azt az erőt, amelynek hatására a szabadon eső testek g (gravitációs) gyorsulással esnek a vonzó test centruma felé, nevezzük nehézségi erőnek. F neh = m g Mi a súly? Azt
Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros
 Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
Aktuátorok Az ábrán a mechatronikát alkotó tudományos területek egymás közötti viszonya látható. A szenzorok és aktuátorok a mechanika és elektrotechnika szoros kapcsolatára utalnak. mért nagyság A fizikai
1. Mozgás Magyar Attila
 1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
1. Mozgás Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 5. Bevezető 2 Kurzus célja 1. Mozgás
Ipari robotok megfogó szerkezetei
 IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó
IPARI ROBOTOK Ipari robotok megfogó szerkezetei 6. előadás Dr. Pintér József Tananyag vázlata Ipari robotok megfogó szerkezetei 1. Effektor fogalma 2. Megfogó szerkezetek csoportosítása 3. Mechanikus megfogó
Tartalom. 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció)
") Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Tartalom 1. Állapotegyenletek megoldása 2. Állapot visszacsatolás (pólusallokáció) 2015 1 Állapotgyenletek megoldása Tekintsük az ẋ(t) = ax(t), x(0) = 1 differenciálegyenletet. Ismert, hogy a megoldás
Útváltók. Fenyvesi D. Dr. Harkay G. OE-BGK
 Útváltók Fenyvesi D. Dr. Harkay G. OE-BGK Irányítóelemek Irányítóelemek A hidraulikus rendszer alapvető irányítási feladatait, a működtetett rendszer igényei határozzák meg, mint pl. Mozgásirány: útváltók.
Útváltók Fenyvesi D. Dr. Harkay G. OE-BGK Irányítóelemek Irányítóelemek A hidraulikus rendszer alapvető irányítási feladatait, a működtetett rendszer igényei határozzák meg, mint pl. Mozgásirány: útváltók.
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS-
 A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
A K É T V É G É N A L Á T Á M A S Z T O T T T A R T Ó S T A T I K A I V IZS- Forgatónyomaték meghatározása G Á L A T A Egy erő forgatónyomatékkal hat egy pontra, ha az az erővel össze van kötve. Például
Röntgen-gamma spektrometria
 Röntgen-gamma spektrométer fejlesztése radioaktív anyagok elemi összetétele és izotópszelektív radioaktivitása egyidejű meghatározására Szalóki Imre, Gerényi Anita, Radócz Gábor Nukleáris Technikai Intézet
Röntgen-gamma spektrométer fejlesztése radioaktív anyagok elemi összetétele és izotópszelektív radioaktivitása egyidejű meghatározására Szalóki Imre, Gerényi Anita, Radócz Gábor Nukleáris Technikai Intézet
Elektropneumatika. 3. előadás
 3. előadás Tartalom: Az elektropneumatikus vezérlés Az elektropneumatikus a rendszer elemei: hálózati tápegység, elektromechanikus kapcsoló elemek: relék, szelepek, szenzorok. Automatizálástechnika EP
3. előadás Tartalom: Az elektropneumatikus vezérlés Az elektropneumatikus a rendszer elemei: hálózati tápegység, elektromechanikus kapcsoló elemek: relék, szelepek, szenzorok. Automatizálástechnika EP
Versenyző kódja: 35 27/2012. (VIII. 27.) NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny ELŐDÖNTŐ
 NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny ELŐDÖNTŐ") 54 523 04-2016 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny ELŐDÖNTŐ ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII.27.) NGM rendelet : Mechatronikai
54 523 04-2016 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny ELŐDÖNTŐ ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII.27.) NGM rendelet : Mechatronikai
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS!
 Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
Figyelem! Csak belső és saját használatra! Terjesztése és másolása TILOS! 1. példa Vasúti kocsinak a 6. ábrán látható ütközőjébe épített tekercsrugóban 44,5 kn előfeszítő erő ébred. A rugó állandója 0,18
3. Az alábbi adatsor egy rugó hosszát ábrázolja a rá ható húzóerő függvényében:
 1. A mellékelt táblázat a Naphoz legközelebbi 4 bolygó keringési időit és pályagörbéik félnagytengelyeinek hosszát (a) mutatja. (A félnagytengelyek Nap- Föld távolságegységben vannak megadva.) a) Ábrázolja
1. A mellékelt táblázat a Naphoz legközelebbi 4 bolygó keringési időit és pályagörbéik félnagytengelyeinek hosszát (a) mutatja. (A félnagytengelyek Nap- Föld távolságegységben vannak megadva.) a) Ábrázolja
Nyomásirányító készülékek. Fenyvesi D. Dr. Harkay G. OE BGK
 Nyomásirányító készülékek Fenyvesi D. Dr. Harkay G. OE BGK Nyomáshatároló szelep Közvetlen vezérlésű rugóerőből: p r p r Beállított nagyobb nyomás esetén nyitás, azaz p 1 > p r. Nyomáshatároló szelep
Nyomásirányító készülékek Fenyvesi D. Dr. Harkay G. OE BGK Nyomáshatároló szelep Közvetlen vezérlésű rugóerőből: p r p r Beállított nagyobb nyomás esetén nyitás, azaz p 1 > p r. Nyomáshatároló szelep
Munka, energia Munkatétel, a mechanikai energia megmaradása
 Munka, energia Munkatétel, a mechanikai energia megmaradása Munkavégzés történik ha: felemelek egy könyvet kihúzom az expandert A munka Fizikai értelemben munkavégzésről akkor beszélünk, ha egy test erő
Munka, energia Munkatétel, a mechanikai energia megmaradása Munkavégzés történik ha: felemelek egy könyvet kihúzom az expandert A munka Fizikai értelemben munkavégzésről akkor beszélünk, ha egy test erő
VisualNastran4D. kinematikai vizsgálata, szimuláció
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
Projektfeladatok 2014, tavaszi félév
 Projektfeladatok 2014, tavaszi félév Gyakorlatok Félév menete: 1. gyakorlat: feladat kiválasztása 2-12. gyakorlat: konzultációs rendszeres beszámoló a munka aktuális állásáról (kötelező) 13-14. gyakorlat:
Projektfeladatok 2014, tavaszi félév Gyakorlatok Félév menete: 1. gyakorlat: feladat kiválasztása 2-12. gyakorlat: konzultációs rendszeres beszámoló a munka aktuális állásáról (kötelező) 13-14. gyakorlat:
9. SZERSZÁMOK POZÍCIONÁLÁSA
 9. SZERSZÁMOK POZÍCIONÁLÁSA Meghatározás A szerszámok pozícionálásakor, nagy gondot kell fordítani a potenciálisan fennálló ütközések elkerülésére, valamint biztosítanunk kell, hogy a szerszámgép forgatási
9. SZERSZÁMOK POZÍCIONÁLÁSA Meghatározás A szerszámok pozícionálásakor, nagy gondot kell fordítani a potenciálisan fennálló ütközések elkerülésére, valamint biztosítanunk kell, hogy a szerszámgép forgatási
Osztályozó, javító vizsga 9. évfolyam gimnázium. Írásbeli vizsgarész ELSŐ RÉSZ
 Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Írásbeli vizsgarész ELSŐ RÉSZ 1. Egy téglalap alakú háztömb egyik sarkából elindulva 80 m, 150 m, 80 m utat tettünk meg az egyes házoldalak mentén, míg a szomszédos sarokig értünk. Mekkora az elmozdulásunk?
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7.
 7.") Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
Számítógépvezérelt irányítás és szabályozás elmélete (Bevezetés a rendszer- és irányításelméletbe, Computer Controlled Systems) 7. előadás Szederkényi Gábor Pázmány Péter Katolikus Egyetem Információs
11.3. Az Achilles- ín egy olyan rugónak tekinthető, amelynek rugóállandója 3 10 5 N/m. Mekkora erő szükséges az ín 2 mm- rel történő megnyújtásához?
 Fényemisszió 2.45. Az elektromágneses spektrum látható tartománya a 400 és 800 nm- es hullámhosszak között található. Mely energiatartomány (ev- ban) felel meg ennek a hullámhossztartománynak? 2.56. A
Fényemisszió 2.45. Az elektromágneses spektrum látható tartománya a 400 és 800 nm- es hullámhosszak között található. Mely energiatartomány (ev- ban) felel meg ennek a hullámhossztartománynak? 2.56. A
PÉLDÁK ERŐTÖRVÉNYEKRE
 PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
PÉLÁ ERŐTÖRVÉNYERE Szabad erők: erőtörvénnyel megadhatók, általában nem függenek a test mozgásállapotától (sebességtől, gyorsulástól) Példák: nehézségi erő, súrlódási erők, rugalmas erők, felhajtóerők,
Pro/ENGINEER Advanced Mechanica
 Pro/ENGINEER Advanced Mechanica 2009. június 25. Ott István www.snt.hu/cad Nagy alakváltozások Lineáris megoldás Analízis a nagy deformációk tartományában Jellemzı alkalmazási területek: Bepattanó rögzítı
Pro/ENGINEER Advanced Mechanica 2009. június 25. Ott István www.snt.hu/cad Nagy alakváltozások Lineáris megoldás Analízis a nagy deformációk tartományában Jellemzı alkalmazási területek: Bepattanó rögzítı
Mérések állítható hajlásszögű lejtőn
 A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
Nyomás a dugattyúerők meghatározásához 6,3 bar. Nyersanyag:
 Dugattyúrúd nélküli hengerek Siklóhenger 16-80 mm Csatlakozások: M7 - G 3/8 Kettős működésű mágneses dugattyúval Integrált 1 Üzemi nyomás min/max 2 bar / 8 bar Környezeti hőmérséklet min./max. -10 C /
Dugattyúrúd nélküli hengerek Siklóhenger 16-80 mm Csatlakozások: M7 - G 3/8 Kettős működésű mágneses dugattyúval Integrált 1 Üzemi nyomás min/max 2 bar / 8 bar Környezeti hőmérséklet min./max. -10 C /
670 milliszekundumos csomagolási ciklusidő
 670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
670 milliszekundumos csomagolási ciklusidő A nagy sebességű T portál és a Tripod nagy dinamikát nyújt kedvező ár/érték aránnyal A Festo nagy sebességű T portálja és a Tripod 30 százalékkal gyorsabb, mint
Gépjárművek erőátvitele II.
 Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Gépjárművek erőátvitele II. Készítette: Kovács Balázs DJQ4YX 2016/2017/I. félév Oktató: Vass Sándor Bárdos Ádám Budapest,
Budapesti Műszaki és Gazdaságtudományi Egyetem Közlekedésmérnöki és Járműmérnöki Kar Gépjárművek erőátvitele II. Készítette: Kovács Balázs DJQ4YX 2016/2017/I. félév Oktató: Vass Sándor Bárdos Ádám Budapest,
MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc
 MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc BME Elektronikus Eszközök Tanszéke Smart Systems Integration EMMC+ Az EU által támogatott 2 éves mesterképzési
MEMS eszközök redukált rendű modellezése a Smart Systems Integration mesterképzésben Dr. Ender Ferenc BME Elektronikus Eszközök Tanszéke Smart Systems Integration EMMC+ Az EU által támogatott 2 éves mesterképzési
MUNKAANYAG. Bellák György László. Mechatronikai elemek. A követelménymodul megnevezése: Mechatronikai elemek gyártása, üzemeltetése, karbantartása
 Bellák György László Mechatronikai elemek A követelménymodul megnevezése: Mechatronikai elemek gyártása, üzemeltetése, karbantartása A követelménymodul száma: 0944-06 A tartalomelem azonosító száma és
Bellák György László Mechatronikai elemek A követelménymodul megnevezése: Mechatronikai elemek gyártása, üzemeltetése, karbantartása A követelménymodul száma: 0944-06 A tartalomelem azonosító száma és
Polimerek fizikai, mechanikai, termikus tulajdonságai
 SZÉCHENYI ISTVÁN EGYETEM ANYAGISMERETI ÉS JÁRMŰGYÁRTÁSI TANSZÉK POLIMERTECHNIKA NGB_AJ050_1 Polimerek fizikai, mechanikai, termikus tulajdonságai DR Hargitai Hajnalka 2011.10.05. BURGERS FÉLE NÉGYPARAMÉTERES
SZÉCHENYI ISTVÁN EGYETEM ANYAGISMERETI ÉS JÁRMŰGYÁRTÁSI TANSZÉK POLIMERTECHNIKA NGB_AJ050_1 Polimerek fizikai, mechanikai, termikus tulajdonságai DR Hargitai Hajnalka 2011.10.05. BURGERS FÉLE NÉGYPARAMÉTERES
A.2. Acélszerkezetek határállapotai
 A.. Acélszerkezetek határállapotai A... A teherbírási határállapotok első osztálya: a szilárdsági határállapotok A szilárdsági határállapotok (melyek között a fáradt és rideg törést e helyütt nem tárgyaljuk)
A.. Acélszerkezetek határállapotai A... A teherbírási határállapotok első osztálya: a szilárdsági határállapotok A szilárdsági határállapotok (melyek között a fáradt és rideg törést e helyütt nem tárgyaljuk)
Versenyző kódja: 38 27/2012. (VIII. 27.) NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.
 NGM rendelet MAGYAR KERESKEDELMI ÉS IPARKAMARA. Országos Szakmai Tanulmányi Verseny.") 54 523 04-2015 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
54 523 04-2015 MAGYAR KERESKEDELMI ÉS IPARKAMARA Országos Szakmai Tanulmányi Verseny Elődöntő ÍRÁSBELI FELADAT Szakképesítés: 54 523 04 SZVK rendelet száma: 27/2012. (VIII. 27.) NGM rendelet : Mechatronikai
 MECHANIKA I. /Statika/ 1. előadás SZIE-YMM 1. Bevezetés épületek, építmények fizikai hatások, köztük erőhatások részleges vagy teljes tönkremenetel használhatatlanná válás anyagi kár, emberáldozat 1 Cél:
MECHANIKA I. /Statika/ 1. előadás SZIE-YMM 1. Bevezetés épületek, építmények fizikai hatások, köztük erőhatások részleges vagy teljes tönkremenetel használhatatlanná válás anyagi kár, emberáldozat 1 Cél:
Belsőégésű motor hengerfej geometriai érzékenység-vizsgálata Geometriai építőelemek változtatásának hatása a hengerfej szilárdsági viselkedésére
 Belsőégésű motor hengerfej geometriai érzékenység-vizsgálata Geometriai építőelemek változtatásának hatása a hengerfej szilárdsági viselkedésére Néhány példa a C3D Műszaki Tanácsadó Kft. korábbi munkáiból
Belsőégésű motor hengerfej geometriai érzékenység-vizsgálata Geometriai építőelemek változtatásának hatása a hengerfej szilárdsági viselkedésére Néhány példa a C3D Műszaki Tanácsadó Kft. korábbi munkáiból
Hangfrekvenciás mechanikai rezgések vizsgálata
 KLASSZIKUS FIZIKA LABORATÓRIUM 3. MÉRÉS Hangfrekvenciás mechanikai rezgések vizsgálata Mérést végezte: Enyingi Vera Atala ENVSAAT.ELTE Mérés időpontja: 2011. november 23. Szerda délelőtti csoport 1. A
KLASSZIKUS FIZIKA LABORATÓRIUM 3. MÉRÉS Hangfrekvenciás mechanikai rezgések vizsgálata Mérést végezte: Enyingi Vera Atala ENVSAAT.ELTE Mérés időpontja: 2011. november 23. Szerda délelőtti csoport 1. A
Rezgőmozgás, lengőmozgás
 Rezgőmozgás, lengőmozgás A rezgőmozgás időben ismétlődő, periodikus mozgás. A rezgő test áthalad azon a helyen, ahol egyensúlyban volt a kitérítés előtt, és két szélső helyzet között periodikus mozgást
Rezgőmozgás, lengőmozgás A rezgőmozgás időben ismétlődő, periodikus mozgás. A rezgő test áthalad azon a helyen, ahol egyensúlyban volt a kitérítés előtt, és két szélső helyzet között periodikus mozgást
Modern alkalmazások. Rendszerbe illesztés. Modern alkalmazások. Aktuátorok. Aktuátor (Munkahenger) Master KRC. Szelepek (Út-váltó, folytóvisszacsapó
 Master KRC. Szelepek (Út-váltó, folytóvisszacsapó") Modern alkalmazások Aktuátorok Rendszerbe illesztés Modern alkalmazások Aktuátor (Munkahenger) Master KRC Servo Szelepegység Fő munkahenger Vezérlő egység Kiegyenlítő henger Kommunikációs kábelek Master
Modern alkalmazások Aktuátorok Rendszerbe illesztés Modern alkalmazások Aktuátor (Munkahenger) Master KRC Servo Szelepegység Fő munkahenger Vezérlő egység Kiegyenlítő henger Kommunikációs kábelek Master
A végeselem módszer alapjai. 2. Alapvető elemtípusok
 A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
CNC technika. segédlet a CNC tantárgy oktatásához. Készítette: Paróczai János 2005.12.08
 CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
CNC technika segédlet a CNC tantárgy oktatásához Készítette: Paróczai János 2005.12.08 3. A CNC technika és a szerszámgép 3.1. Bevezetés A különböző gépi megmunkálási technológiák szüntelen továbbfejlődésén
Szivattyú-csővezeték rendszer rezgésfelügyelete. Dr. Hegedűs Ferenc
 Szivattyú-csővezeték rendszer rezgésfelügyelete Dr. Hegedűs Ferenc (fhegedus@hds.bme.hu) 1. Feladat ismertetése Rezgésfelügyeleti módszer kidolgozása szivattyúk nyomásjelére alapozva Mérési környezetben
Szivattyú-csővezeték rendszer rezgésfelügyelete Dr. Hegedűs Ferenc (fhegedus@hds.bme.hu) 1. Feladat ismertetése Rezgésfelügyeleti módszer kidolgozása szivattyúk nyomásjelére alapozva Mérési környezetben
Értékelés Összesen: 100 pont 100% = 100 pont A VIZSGAFELADAT MEGOLDÁSÁRA JAVASOLT %-OS EREDMÉNY: EBBEN A VIZSGARÉSZBEN A VIZSGAFELADAT ARÁNYA 35%.
 Az Országos Képzési Jegyzékről és az Országos Képzési Jegyzék módosításának eljárásrendjéről szóló 133/2010. (IV. 22.) Korm. rendelet alapján: Szakképesítés, szakképesítés-elágazás, rész-szakképesítés,
Az Országos Képzési Jegyzékről és az Országos Képzési Jegyzék módosításának eljárásrendjéről szóló 133/2010. (IV. 22.) Korm. rendelet alapján: Szakképesítés, szakképesítés-elágazás, rész-szakképesítés,
AIRPOL PRM frekvenciaváltós csavarkompresszorok. Airpol PRM frekvenciaváltós csavarkompresszorok
 Airpol PRM frekvenciaváltós csavarkompresszorok Az Airpol PRM frekvenciaváltós csavarkompresszorok változtatható sebességű meghajtással rendelkeznek 50-100%-ig. Ha a sűrített levegő fogyasztás kevesebb,
Airpol PRM frekvenciaváltós csavarkompresszorok Az Airpol PRM frekvenciaváltós csavarkompresszorok változtatható sebességű meghajtással rendelkeznek 50-100%-ig. Ha a sűrített levegő fogyasztás kevesebb,
Rákóczi híd próbaterhelése
 Rákóczi híd próbaterhelése Dr. Kövesdi Balázs egyetemi docens, BME Dr. Dunai László egyetemi tanár, BME Próbaterhelés célja - programja Cél: Villamos forgalom elindítása előtti teherbírás ellenőrzése helyszíni
Rákóczi híd próbaterhelése Dr. Kövesdi Balázs egyetemi docens, BME Dr. Dunai László egyetemi tanár, BME Próbaterhelés célja - programja Cél: Villamos forgalom elindítása előtti teherbírás ellenőrzése helyszíni
DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK SPM BEARINGCHECKER KÉZI CSAPÁGYMÉRŐ HASZNÁLATA /OKTATÁSI SEGÉDLET DIAGNOSZTIKA TANTÁRGYHOZ/
 DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK SPM BEARINGCHECKER KÉZI CSAPÁGYMÉRŐ HASZNÁLATA /OKTATÁSI SEGÉDLET DIAGNOSZTIKA TANTÁRGYHOZ/ ÖSSZEÁLLÍTOTTA: DEÁK KRISZTIÁN 2013 Az SPM BearingChecker
DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK SPM BEARINGCHECKER KÉZI CSAPÁGYMÉRŐ HASZNÁLATA /OKTATÁSI SEGÉDLET DIAGNOSZTIKA TANTÁRGYHOZ/ ÖSSZEÁLLÍTOTTA: DEÁK KRISZTIÁN 2013 Az SPM BearingChecker
A pneumatika építőelemei 1.
 A pneumatika építőelemei 1. A pneumatikában alkalmazott építőelemek és működésük végrehajtó elemek (munkahengerek) PTE PMMFK 1 PTE PMMFK 2 PTE PMMFK 3 Egyszeres működésű henger rugós visszatérítéssel Egyszeres
A pneumatika építőelemei 1. A pneumatikában alkalmazott építőelemek és működésük végrehajtó elemek (munkahengerek) PTE PMMFK 1 PTE PMMFK 2 PTE PMMFK 3 Egyszeres működésű henger rugós visszatérítéssel Egyszeres
Rakományrögzítés. Ezek lehetnek: A súrlódási tényező növelése, Kitámasztás, Kikötés, lekötés. 1. A súrlódási tényező növelése
 Rakományrögzítés A szállító járműre felrakott áruk, termékek a szállítás során fellépő hatások (rázkódás, gyorsulás, fékezés, kanyarodás, stb.) miatt elmozdulhatnak, elcsúszhatnak, felborulhatnak. Ennek
Rakományrögzítés A szállító járműre felrakott áruk, termékek a szállítás során fellépő hatások (rázkódás, gyorsulás, fékezés, kanyarodás, stb.) miatt elmozdulhatnak, elcsúszhatnak, felborulhatnak. Ennek
+ Egyszeres muködésu szögletes henger: +Tömlohenger: (17. ábra) Jellemzok
 Jellemzok") 19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
19 +Tömlohenger: (17. ábra) Jellemzok - kis beépítési méret - elvi lökethossz 80%-a'ha,sználható, külso lökethossz-határoló szükséges - szöget bezáró felilletek,között is használható - ero a lökethossz
Első sajátfrekvencia meghatározása vasúti fékpaneleknél XIV. ANSYS Konferencia Budaörs, 2015.04.23
 Első sajátfrekvencia meghatározása vasúti fékpaneleknél XIV. ANSYS Konferencia Budaörs, 2015.04.23 Knorr-Bremse Group Tartalom 1. Vasúti fékpanel 2. Rezonancia mérés 2.1 Impulzuskalapács mérés 3. Végeselemes
Első sajátfrekvencia meghatározása vasúti fékpaneleknél XIV. ANSYS Konferencia Budaörs, 2015.04.23 Knorr-Bremse Group Tartalom 1. Vasúti fékpanel 2. Rezonancia mérés 2.1 Impulzuskalapács mérés 3. Végeselemes
TB6600 V1 Léptetőmotor vezérlő
 TB6600 V1 Léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/4, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-4,5A között állítható motoráram Tápellátás: 12-45V közötti feszültséget igényel
TB6600 V1 Léptetőmotor vezérlő Mikrolépés lehetősége: 1, 1/2, 1/4, 1/8, 1/16. A vezérlő egy motor meghajtására képes 0,5-4,5A között állítható motoráram Tápellátás: 12-45V közötti feszültséget igényel
REZGÉSDIAGNOSZTIKA ALAPJAI
 TÁMOP-4.1.1.F-14/1/KONV-2015-0006 SZTE Mérnöki Kar Műszaki Intézet, Duális és moduláris képzésfejlesztés alprogram (1a) A rezgésdiagnosztika gyakorlati alkalmazása REZGÉSDIAGNOSZTIKA ALAPJAI Forgács Endre
TÁMOP-4.1.1.F-14/1/KONV-2015-0006 SZTE Mérnöki Kar Műszaki Intézet, Duális és moduláris képzésfejlesztés alprogram (1a) A rezgésdiagnosztika gyakorlati alkalmazása REZGÉSDIAGNOSZTIKA ALAPJAI Forgács Endre
Felvételi, 2018 szeptember - Alapképzés, fizika vizsga -
 Sapientia Erdélyi Magyar Tudományegyetem Marosvásárhelyi Kar Felvételi, 2018 szeptember - Alapképzés, fizika vizsga - Minden tétel kötelező Hivatalból 10 pont jár Munkaidő 3 óra I Az alábbi kérdésekre
Sapientia Erdélyi Magyar Tudományegyetem Marosvásárhelyi Kar Felvételi, 2018 szeptember - Alapképzés, fizika vizsga - Minden tétel kötelező Hivatalból 10 pont jár Munkaidő 3 óra I Az alábbi kérdésekre
1. Feladatok a dinamika tárgyköréből
 1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
1. Feladatok a dinamika tárgyköréből Newton három törvénye 1.1. Feladat: Három azonos m tömegű gyöngyszemet fonálra fűzünk, egymástól kis távolságokban a fonálhoz rögzítünk, és az elhanyagolható tömegű
Épületek gázellátása 3. A nyomásszabályozó állomások kialakítása
 Épületek gázellátása 3. A nyomásszabályozó állomások kialakítása Épületgépészeti rendszerek 2014. március 10. Nyomásszabályozó az elosztóvezetéken 2 A nyomásszabályozó állomások feladata A nyomásszabályozó
Épületek gázellátása 3. A nyomásszabályozó állomások kialakítása Épületgépészeti rendszerek 2014. március 10. Nyomásszabályozó az elosztóvezetéken 2 A nyomásszabályozó állomások feladata A nyomásszabályozó
Jegyzőkönyv. hangfrekvenciás mechanikai rezgések vizsgálatáról (3)
") Jegyzőkönyv a hangfrekvenciás mechanikai rezgések vizsgálatáról () Készítette: Tüzes Dániel Mérés ideje: 2008-11-19, szerda 14-18 óra Jegyzőkönyv elkészülte: 2008-11-26 A mérés célja A feladat két anyag
Jegyzőkönyv a hangfrekvenciás mechanikai rezgések vizsgálatáról () Készítette: Tüzes Dániel Mérés ideje: 2008-11-19, szerda 14-18 óra Jegyzőkönyv elkészülte: 2008-11-26 A mérés célja A feladat két anyag
Hercules tolókapu motor szerelési leírás
 Hercules tolókapu motor szerelési leírás 1 2 Figyelem! Ezen kézikönyvben lévő telepítést csak szakképzett műszaki személy végezheti és nem a végfelhasználó. A telepítést végző szerepe, hogy tájékoztassa
Hercules tolókapu motor szerelési leírás 1 2 Figyelem! Ezen kézikönyvben lévő telepítést csak szakképzett műszaki személy végezheti és nem a végfelhasználó. A telepítést végző szerepe, hogy tájékoztassa
Dr. habil. Czupy Imre
 AZ ERDŐ- ÉS VADGAZDÁLKODÁSBAN ELŐFORDULÓ ERGONÓMIAI KOCKÁZATOK ÉS AZ ÁLTALUK OKOZOTT MOZGÁSSZERVI MEGBETEGEDÉSEK Dr. habil. Czupy Imre SOPRONI EGYETEM intézetigazgató egyetemi docens SZABADBAN VÉGZETT
AZ ERDŐ- ÉS VADGAZDÁLKODÁSBAN ELŐFORDULÓ ERGONÓMIAI KOCKÁZATOK ÉS AZ ÁLTALUK OKOZOTT MOZGÁSSZERVI MEGBETEGEDÉSEK Dr. habil. Czupy Imre SOPRONI EGYETEM intézetigazgató egyetemi docens SZABADBAN VÉGZETT
Piri Dávid. Mérőállomás célkövető üzemmódjának pontossági vizsgálata
 Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
Piri Dávid Mérőállomás célkövető üzemmódjának pontossági vizsgálata Feladat ismertetése Mozgásvizsgálat robot mérőállomásokkal Automatikus irányzás Célkövetés Pozíció folyamatos rögzítése Célkövető üzemmód
6. MECHANIKA-STATIKA GYAKORLAT (kidolgozta: Triesz Péter, egy. ts.; Tarnai Gábor, mérnöktanár)
") SZÉHNYI ISTVÁN GYT LKLZOTT HNIK TNSZÉK 6. HNIK-STTIK GYKORLT (kidolgozta: Triesz Péter egy. ts.; Tarnai Gábor mérnöktanár) Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa gy létrát egy
SZÉHNYI ISTVÁN GYT LKLZOTT HNIK TNSZÉK 6. HNIK-STTIK GYKORLT (kidolgozta: Triesz Péter egy. ts.; Tarnai Gábor mérnöktanár) Négy erő egyensúlya ulmann-szerkesztés Ritter-számítás 6.. Példa gy létrát egy
UFS Mark-1 olajszûrô berendezés
 ULTRA FINOM SZÛRÔ UFS Mark-1 olajszûrô berendezés Alkalmas: hidraulika, és egyéb ipari olajok off line ultra finom háttérszûrésére. Az olajat a NAS olajtisztasági szabvány szerinti 7-9-es, az ISO szabvány
ULTRA FINOM SZÛRÔ UFS Mark-1 olajszûrô berendezés Alkalmas: hidraulika, és egyéb ipari olajok off line ultra finom háttérszûrésére. Az olajat a NAS olajtisztasági szabvány szerinti 7-9-es, az ISO szabvány
Elektrokémiai fémleválasztás. Az elektrokémiai fémleválasztás speciális fogalmai és laboratóriumi kísérleti módszerei Galvántechnikai alapok
 Elektrokémiai fémleválasztás Az elektrokémiai fémleválasztás speciális fogalmai és laboratóriumi kísérleti módszerei Galvántechnikai alapok Péter László Elektrokémiai fémleválasztás Fémleválasztás speciális
Elektrokémiai fémleválasztás Az elektrokémiai fémleválasztás speciális fogalmai és laboratóriumi kísérleti módszerei Galvántechnikai alapok Péter László Elektrokémiai fémleválasztás Fémleválasztás speciális
TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI. 1. Bevezetés
 TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI Dr. Goda Tibor egyetemi docens Gép- és Terméktervezés Tanszék 1. Bevezetés 1.1. A végeselem módszer alapjai - diszkretizáció, - szerkezet felbontása kicsi szabályos elemekre
TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI Dr. Goda Tibor egyetemi docens Gép- és Terméktervezés Tanszék 1. Bevezetés 1.1. A végeselem módszer alapjai - diszkretizáció, - szerkezet felbontása kicsi szabályos elemekre
Wigner Jenő Műszaki, Informatikai Középiskola és Kollégium -/-/031617 OKJ: 54 523 04 1000 00 00. Automatikai technikus szakképesítés.
 Informatikai, munkaszervezési és tervezési, technológiai alaptevékenységek végzése 1 rész 090011 090011/1gy nap nap nap 4. nap 5. nap 6. nap tevékenység 20105.14 20106.18 Internetről szakmai dokumentumok
Informatikai, munkaszervezési és tervezési, technológiai alaptevékenységek végzése 1 rész 090011 090011/1gy nap nap nap 4. nap 5. nap 6. nap tevékenység 20105.14 20106.18 Internetről szakmai dokumentumok
ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat)
") ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat) Erővel záró nyomatékkötések Hatáselve: a kapcsolódó felületre merőleges rugalmas szorítás hatására a felület érintőjének irányába ható terheléssel ellentétes irányban ébredő
ERŐVEL ZÁRÓ KÖTÉSEK (Vázlat) Erővel záró nyomatékkötések Hatáselve: a kapcsolódó felületre merőleges rugalmas szorítás hatására a felület érintőjének irányába ható terheléssel ellentétes irányban ébredő
CNC programozás. Alap ismeretek. Készített: Hatos István
 CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
CNC programozás Alap ismeretek Készített: Hatos István Mit jelent a CNC? A számjegyvezérlés (Numerical Control), a vezérlés a parancsokat az alkatrészprogramból ismeri. Az alkatrészprogram alfanumerikus
Intelligens gépek elemei Bevezetés
 Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Intelligens gépek elemei Bevezetés A gépészet fejlődése, a mechatronika kialakulása Mi jellemezte az 1900 előtti időket? Tisztán mechanikus rendszerek Gőzgép (1769) Dinamók, egyenáramú motor (1870) Forgó
Műszertechnikai és Automatizálási Intézet MÉRÉSTECHNIKA LABORATÓRIUMI MÉRÉSEK ÚTMUTATÓ
 Óbudai Egyetem Kandó Kálmán Villamosmérnöki Kar Műszertechnikai és Automatizálási Intézet MÉRÉSTECHNIKA LABORATÓRIUMI MÉRÉSEK ÚTMUTATÓ 20/7. sz. mérés HAMEG HM-5005 típusú spektrumanalizátor vizsgálata
Óbudai Egyetem Kandó Kálmán Villamosmérnöki Kar Műszertechnikai és Automatizálási Intézet MÉRÉSTECHNIKA LABORATÓRIUMI MÉRÉSEK ÚTMUTATÓ 20/7. sz. mérés HAMEG HM-5005 típusú spektrumanalizátor vizsgálata
Oktatási Hivatal FIZIKA I. KATEGÓRIA. A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FELADATOK
 Oktatási Hivatal A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA I. KATEGÓRIA FELADATOK Bimetal motor tulajdonságainak vizsgálata A mérőberendezés leírása: A vizsgálandó
Oktatási Hivatal A 2016/2017. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA I. KATEGÓRIA FELADATOK Bimetal motor tulajdonságainak vizsgálata A mérőberendezés leírása: A vizsgálandó
2.3 Newton törvények, mozgás lejtőn, pontrendszerek
 Keresés (http://wwwtankonyvtarhu/hu) NVDA (http://wwwnvda-projectorg/) W3C (http://wwww3org/wai/intro/people-use-web/) A- (#) A (#) A+ (#) (#) English (/en/tartalom/tamop425/0027_fiz2/ch01s03html) Kapcsolat
Keresés (http://wwwtankonyvtarhu/hu) NVDA (http://wwwnvda-projectorg/) W3C (http://wwww3org/wai/intro/people-use-web/) A- (#) A (#) A+ (#) (#) English (/en/tartalom/tamop425/0027_fiz2/ch01s03html) Kapcsolat
EGYSZERŰ GÉPEK. Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét.
 EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
EGYSZERŰ GÉPEK Azok az eszközök, amelyekkel kedvezőbbé lehet tenni az erőhatás nagyságát, irányát, támadáspontjának helyét. Az egyszerű gépekkel munkát nem takaríthatunk meg, de ugyanazt a munkát kisebb
Pneumatikus kompatibilitás
 Pneumatikus kompatibilitás Farkas József, Kőfalusi Pál, Dr. Varga Ferenc Gépjárművek üzeme I. laboratóriumi gyakorlat 1 Lektorálta és szerkesztette Dr. Varga Ferenc és Dr. Emőd István Tartalomjegyzék:
Pneumatikus kompatibilitás Farkas József, Kőfalusi Pál, Dr. Varga Ferenc Gépjárművek üzeme I. laboratóriumi gyakorlat 1 Lektorálta és szerkesztette Dr. Varga Ferenc és Dr. Emőd István Tartalomjegyzék:
XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA
 XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA Kolozsvár, 2010. március 25-26. ÍVHEGESZTŐ ROBOT ALKALMAZÁSTECHNIKAI JELLEMZŐI BAGYINSZKI Gyula, BITAY Enikő Abstract The arc welding is the important joining
XV. FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA Kolozsvár, 2010. március 25-26. ÍVHEGESZTŐ ROBOT ALKALMAZÁSTECHNIKAI JELLEMZŐI BAGYINSZKI Gyula, BITAY Enikő Abstract The arc welding is the important joining
GÖRGŐS LÁNCHAJTÁS tervezése
 MISKOLCI EGYETEM GÉPELEMEK TANSZÉKE OKTATÁSI SEGÉDLET a GÉPELEMEK II. c. tantárgyhoz GÖRGŐS LÁNCHAJTÁS tervezése Összeállította: Dr. Szente József egyetemi docens Miskolc, 008. A lánchajtás tervezése során
MISKOLCI EGYETEM GÉPELEMEK TANSZÉKE OKTATÁSI SEGÉDLET a GÉPELEMEK II. c. tantárgyhoz GÖRGŐS LÁNCHAJTÁS tervezése Összeállította: Dr. Szente József egyetemi docens Miskolc, 008. A lánchajtás tervezése során
FELVONÓ- ÉS MOZGÓLÉPCSŐ-ELLENŐR SZAKKÉPESÍTÉS SZAKMAI ÉS VIZSGAKÖVETELMÉNYEI
 FELVONÓ- ÉS MOZGÓLÉPSŐ-ELLENŐR SZKKÉPESÍTÉS SZKMI ÉS VIZSGKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ DTOK 1. szakképesítés azonosító száma: 61 521 01 2. szakképesítés megnevezése: Felvonó- és
FELVONÓ- ÉS MOZGÓLÉPSŐ-ELLENŐR SZKKÉPESÍTÉS SZKMI ÉS VIZSGKÖVETELMÉNYEI I. ORSZÁGOS KÉPZÉSI JEGYZÉKEN SZEREPLŐ DTOK 1. szakképesítés azonosító száma: 61 521 01 2. szakképesítés megnevezése: Felvonó- és
NGB_AJ008_1 IPARI ROBOTOK
 Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
Gyárt rtástechnológia NGB_AJ008_1 IPARI ROBOTOK Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és okai, a hazai
1. ábra. 24B-19 feladat
 . gyakorlat.. Feladat: (HN 4B-9) A +Q töltés egy hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld.. ábra.). Számítsuk ki az E elektromos térerősséget a vonal. ábra. 4B-9 feladat irányában lévő,
. gyakorlat.. Feladat: (HN 4B-9) A +Q töltés egy hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld.. ábra.). Számítsuk ki az E elektromos térerősséget a vonal. ábra. 4B-9 feladat irányában lévő,
Elektronikus közelítéskapcsolók
 Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
Elektronikus közelítéskapcsolók A Mechatronikában az érzékelők (szenzorok) szinte minden fajtáját alkalmazzák A közelítéskapcsolók csoportosítása a működési alapelvük szerint: 1. mágneses közelítéskapcsolók;
HELYI TANTERV. Mechanika
 HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
ROBOTTECHNIKA ALKALMAZÁSOK, ROBOT FOGALMA. Dr. Pintér József
 ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
ROBOTTECHNIKA FEJLŐDÉST STÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA Dr. Pintér József Tananyag vázlatav IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás" és
A hang mint mechanikai hullám
 A hang mint mechanikai hullám I. Célkitűzés Hullámok alapvető jellemzőinek megismerése. A hanghullám fizikai tulajdonságai és a hangérzet közötti összefüggések bemutatása. Fourier-transzformáció alapjainak
A hang mint mechanikai hullám I. Célkitűzés Hullámok alapvető jellemzőinek megismerése. A hanghullám fizikai tulajdonságai és a hangérzet közötti összefüggések bemutatása. Fourier-transzformáció alapjainak
IPARI ROBOTOK VIZSGÁLATI, ÁLLAPOT-FELÜGYELETI ÉS IRÁNYÍTÁSI RENDSZEREINEK FEJLESZTÉSE
 Bencsik Attila IPARI ROBOTOK VIZSGÁLATI, ÁLLAPOT-FELÜGYELETI ÉS IRÁNYÍTÁSI RENDSZEREINEK FEJLESZTÉSE Pannon Egyetem Informatikai Tudományok Doktori Iskola DOKTORI (PhD) ÉRTEKEZÉS Témavezető: Piglerné dr.
Bencsik Attila IPARI ROBOTOK VIZSGÁLATI, ÁLLAPOT-FELÜGYELETI ÉS IRÁNYÍTÁSI RENDSZEREINEK FEJLESZTÉSE Pannon Egyetem Informatikai Tudományok Doktori Iskola DOKTORI (PhD) ÉRTEKEZÉS Témavezető: Piglerné dr.
DENER Plazmavágók. Típus: Mitsubishi DNR-I 1530 CNC. Dener plazmavágás. Dener plazmavágók. http://www.dener.com/sayfa/89/plasma-cutting.
 DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk
DENER Plazmavágók Dener plazmavágás Dener plazmavágók http://www.dener.com/sayfa/89/plasma-cutting.html Típus: Mitsubishi DNR-I 1530 CNC A képek illusztrációk A képek illusztrációk A képek illusztrációk