Cselekvési tervek generálása a robotikában
|
|
|
- Ágoston Farkas
- 7 évvel ezelőtt
- Látták:
Átírás
1 Cselekvési tervek generálása a robotikában Nagy Tímea, T Régeni Ágnes
2 Robotika bevezető Meghatároz rozás Osztályoz lyozás Jellemzők Robotgeneráci ciók Tartalom Cselekvési si tervek Bevezető Algoritmusok Példák k (PROLOG)
3 Robotika A megnevezés Karel Capek színdarabjából (1921), a cseh robota szóból származik, amely munkát jelent. Általában olyan eszközt, berendezést értünk rajta, amely az ember fizikai és/vagy szellemi munkájához hasonló tevékenységet végez. Rendelkezniük kell számos, sok esetben az intelligencia elemei közé tartozó, tulajdonsággal (tudás, emlékezet, tanulási képesség, döntéseken alapuló közlésicselekvési képesség stb.).
4 Jellemzői Teljes egészében ember által készített szerkezetek. A robotok egyik legfontosabb tulajdonsága a helyváltoztatási képesség, illetve annak hiánya. Tevékenységüket részben vagy teljesen önállóan irányítják.
5 Osztályozás Megkülönböztetünk mobil, statikus, illetve speciális robotokat. Mobil robotok: androidok, animatok, ember nélküli járművek, szórakoztató robotok és az általános autonóm robotok. Statikus robotok: a háztartási és ipari robotok elsősorban a robotkarok, de ez nem követelmény. Speciális robotok a nanorobotok, a fizikai és kémiai területeken fejlesztik.

6 Androidok

7 Animatok

8 Szórakoztató robotok


9 Ipari robotok


10 Nanorobotok
11 Robotgenerációk Első generációs robotok: Kizárólag kézi vezérléssel működtethetőek; nem érzékelik a környezet változásait; a számítógép programja kap főszerepet.
12 Robotgenerációk Második generációs robotok: környezetüket szenzorokkal vizsgálják; képesek kikerülni az útjukba kerülő akadályokat; a feladataikat magas szintű programozási nyelven határozzák meg.
13 Robotgenerációk Harmadik generációs robotok: jól alkalmazkodnak a környezet változásaihoz; alakokat és helyeket ismernek fel; hanggal is vezérelhetők és képesek hanggal válaszolni; önálló döntéseket is hoznak; bonyolult feladatokat oldanak meg; tanuló algoritmusokat használnak.
14 Cselekvési tervek szervezetek, csoportok vagy egyének bizonyos célok elérésére irányuló viselkedésének meghatározása az elérendő célok a cselekvőt körülvevő világhoz kötődnek
15 A célok elérése feltételezi: a világ bizonyos fokú ismeretét az előrelátó, jövőre irányuló következtetés képességét
16 A cselekvéstervezés problémáinak megközelítése: domain-independent-planning domain-dependent-planning
17 A robotika részfeladatai Robotszerkezet építése Cél-meghatározás Érzékelés, alakfelismerés (látás, hallás) Tervgenerálás (elemi műveletsorozat előállítása) Végrehajtás és javítás
 putdown(x) stack(x,y)")
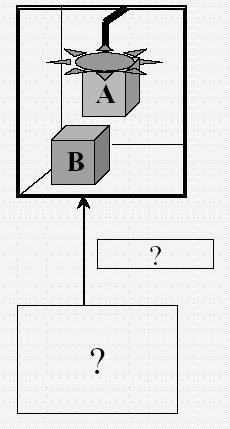
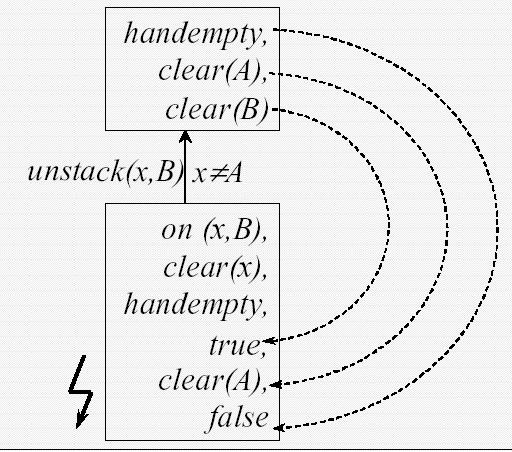
18 Kockavilág Asztalról egy kockát felemel: Asztalra lerak egy kockát: Egy kockát egy kockára rátesz: Egy kockát egy kockáról levesz: pickup(x) putdown(x) stack(x,y) unstack(x,y)
19 Állapot-leírás logikai állításokkal Elemi állítások: on(x,y) egy kocka egy másik kockán van clear(x) egy kocka teteje üres ontable(x) egy kocka az asztalon van handempty robotkar szabad holding(x) robotkar egy kockát tart
20 Szimbólumok Predikátum szimbólumok: ontable(x), on(x,y), clear(x), holding(x), handempty Függvény szimbólumok: pickup(x), putdown(x), stack(x,y), unstack(x,y)
 /\ on(c,a) /\ clear(b) /\ ontable(a) /\")
21 Példa Pozitív literálok konjunkciója: handempty /\ clear(c) /\ on(c,a) /\ clear(b) /\ ontable(a) /\ ontable(b)
22 Műveletek leírása Minden F(x) művelethez megadunk egy: Előfeltétel lista Törlési lista Bővítési lista röviden P röviden D röviden A Pl: pickup(x): P: ontable(x), clear(x), handempty D: ontable(x), clear(x), handempty A: holding(x)
, ontable(b) holding(b), clear(c), on(c,a),")
23 Példa handempty, clear(c), on(c,a), clear(b), ontable(a), ontable(b) holding(b), clear(c), on(c,a), ontable(a)
24 Példa további műveletekre putdown(x) P: holding(x) D: holding(x) A: ontable(x), clear(x), handempty stack(x,y) P: holding(x), clear(y) D: holding(x), clear(y) A: on(x,y), clear(x), handempty unstack(x,y) P: on(x,y), clear(x), handempty D: on(x,y), clear(x), handempty A: holding(x), clear(y)
25 Megoldás állapottér-reprezentációval állapotgráf megoldási út előállítása előre vagy visszafelé haladó kereséssel visszalépéses gráfkeresés heurisztika
26 Redukció a tervgenerálásban
27 Állapot redukálása Kiválasztunk egy megvalósítandó L literált. Keresünk egy olyan M = F(x)θ műveletet, amely bővítési listáján ez a literál szerepel: L Є A Kiszámoljuk a megelőző állapotot: Vesszük a művelet előfeltételeit : P Megvizsgáljuk, hogy a célállapot literáljainak milyen formában kell jelen lenni a megelőző állapotban
28 Példa
29 Regresszió Az L literálnak az M műveletre vett regressziója (elődje): R[L;M] = L ha L Є A és L Є D true ha L Є A false ha L Є D Az M műveletre tartózó redukciós művelet: B(a) = P /\ R[L;M] ( /\ L Є a)
30 Példa
31 Tervgenerálás dekompozícióval Egy összetett L¹ /\ /\ Lⁿ célt tényezőnként (célliterálonként) valósítunk meg. Egy L literál megvalósítása olyan művelettel történik, amely bővítési listáján (megfelelő változó behelyettesítés mellett) szerepel az L. Így az L literál megvalósítását visszavezetjük a művelet előfeltételének (részcél) megvalósítására. A részcélokat újra és újra dekomponáljuk, amíg olyan literálokhoz nem jutunk, amelyek teljesülnek a start-ban.

32 Tiszta dekompozició -A gráf közönséges ágait hívjuk résztervnek. -Megoldás : részterv1,..., résztervn valamilyen sorrendje
33 Dekompoziciós reprezentáció Probléma leírás : start > állapot Kiinduló probléma : start > cél Egyszerű probléma : start > L, ha L Є start Operátorok : A start > L¹ /\ /\ Lⁿ visszavezethető a start > L¹,, start > Lⁿ problémákra. A start > L visszavezethető a start > P problémákra, ahol M olyan művelet, hogy az L Є A

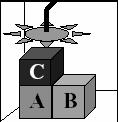
34 Megoldás : 3, 1, 4, 2 vagy 4, 2, 3, 1 Példa
35 Döntési pontok, heurisztikák Melyik cél-literált valósítsuk meg először? Melyik műveletet válasszuk? Melyik változó-helyettesítést alkalmazzuk?
36 Példa
37
38
39
40
41
42 I.STRIPS Egyedül az változik, amit egy akció hatásaként megadunk ez először a STRIPS (Stanford Research Institute Problem Solver) tervezőrendszerben jelent meg. PDDL (Planning Domain Definition Language) reprezentációs nyelvet használja.
43 Főbb elemei A világ bármely állapota a benne igaz elemi logikai állítások konjunkciójaként írható le; ami nem szerepel a leírásban a zárt világ számára hamis. A célt azon elemi állítások konjunkciója adja meg, amelyekről elvárjuk, hogy bármely céllálapotban igazak legyenek.
44 Az operátorokat előfeltételeik és hatásaik határozzák meg Az operátoroknak vannak változói Előfeltételek konjunktív logikai kifejezések hatásaik megadják, hogy milyen állítások válnak igazzá, ill. hamissá az operátor végrehajtását követő állapotban Az akciópéldány végrehajtása előtt a változókat le kell kötni a feltétel oldalon
45 Mi határozza meg? Egy kezdeti állapot Cél állapotok specifikációja Action-ok halmaza, amelyek mindegyikét meghatározzák az előfeltételek és az utófeltételek Lényege : operátorokba bújtatva írja le a világ összes törvényszerűségét egy operátor alkalmazásának következményei: a világ törvényeit töröljük és a világ törvényeihez hozzáadunk.
 részcélt, amit később újra megvalósítunk az aktuális állapotból")
46 Hagyjuk, hogy egy későbbi (T2) részterv elrontson egy már megvalósított (C1) részcélt, amit később újra megvalósítunk az aktuális állapotból kiindulva.
47

48 II.RSTRIPS Töröljük a védett C1 részcélt elrontó tervet. Valósítsuk C2-t a T1 részterv utolsó művelete előtt Legyen ennek a műveletnek a C2 egy újabb előfeltétele Feltéve, hogy a C2-t nem törli ez a művelet.
49 Példa
50
51
52 III.DCOMP 1. fázis: Résztervek előállítása eredeti dekompozicióval. 2. fázis: A felesleges műveletek törlése, sorrendi megkötések fellállítása a műveletekre, majd a résztervek összefésülése. 3. fázis: Ha az összefésülés eredménye egy ütközéses terv, akkor új műveletek beillesztésével az ütközéseket megszüntetjük.
53
54 Sorrendi megkötések Természetes sorrend (1. fázis résztervei) Mely műveletek nem követhetik egymást feltétel nélkül? Az i művelet után nem hajtható végre a j, ha az i törli a j előfeltétel-literáljainak egyikét. Ha i művelet után nem hajtható végre a j, akkor feltüntetjük, j mely előfeltételei sérülnek. Keresünk olyan k műveletet, amely az i után és a j előtt végrehajtva előállítja a sérült feltételt.
55 Példa A 4. művelet (unstack(c,b)) végrehajtása után: holding(c), clear(b), on(b,a), ontable(a) A részcél ami nekünk kell: on(b,a), clear(b), handempty, ontable(a) Megoldás: putdown(c)
56 IV.NONLIN Párhuzamosítjuk a DCOMP első két fázisát: Nem akarjuk a műveleteket egyetlen szálra felfűzni Amint egy művelet megjelenik, azonnal megmondjuk, hogy mely, már meglevő műveletekkel ütközhet, és ilyenkor sorrendi kötéseket teszünk, illetve jelöljük azokat az előfeltétel literálokat, amelyeket a vizsgált két művelet végrehajtása között kell megvalósítani.
57 Logikai reprezentációk Tény Kezdőállapot leírása Szabályok Cél Műveletekből származó P -> A állítások Célállapot leírása Bizonyítandó: Kezdőállapot, műveleti szabályok => célállapot
58 Példa Kezdőállapot: handempty, clear(a), clear(b), ontable(a), ontable(b) Célállapot: on(a,b)
59 Szabályok: Vx Vy (holding(x) /\ clear(y) -> on(x,y) /\ clear(x) /\ handempty) Vx Vy (on(x,y) /\ (clear(x) /\ handempty -> holding(x) /\ clear(y)) Vx (holding(x) -> ontable(x) /\ clear(x) /\ handempty) Vx (ontable(x) /\ clear(x) /\ handempty -> holding(x))
60 Tény: Visszafelé haladó szabályalapú reprezentáció handempty, clear(a), clear(b), ontable(a), ontable(b) Szabályok: Vx (ontable(x) /\ clear(x) /\ handempty -> holding(x)) Vx Vy (holding(x) /\ clear(y) -> on(x,y)) Vx Vy (holding(x) /\ clear(y) -> clear(x)) Vx Vy (holding(x) /\ clear(y) -> handempty)... Cél: on(a,b)

61 Szabályalap lyalapú következtetés

62 Majom és banán példa (PROLOG) Egy szobában van egy majom, a plafonon csüng 10 banán, a szoba sarkában van egy doboz. A majom éhes és kell neki a banán. Mi a teendő? Kell egy terv!
63 Néhány sikertelen probálkozás után a majom elmegy a dobozhoz, odanyomja a banán alá, felmászik rá, leszedi a banánt és megeszi.
, at(monkey, a), at(box, b), at(bananas, c), status(bananas,")
64 Kezdeti- és cél-állapot Kezdeti állapot: on(monkey, floor), on(box, floor), at(monkey, a), at(box, b), at(bananas, c), status(bananas, hanging).
, status(bananas, grabbed).")
65 Cél állapot: on(monkey, box), on(box, floor), at(monkey, c), at(box, c), at(bananas, c), status(bananas, grabbed). Ezeket tudva, hogyan valósítjuk ezt meg?
66 Forrásanyag pp/
TERVGENERÁLÁS. Robotika részfeladatai. Állapot-leírás logikai állításokkal. Kocka világ. Állapot-leírás tulajdonságai. Példa
 Robotika részfeladatai TERVGENERÁLÁS 1. Állapottér-reprezentáció 2. Probléma redukció 3. Probléma dekompozíció 4. Logikai reprezentáció robot-szerkezet építése cél-meghatározás érzékelés, alakfelismerés
Robotika részfeladatai TERVGENERÁLÁS 1. Állapottér-reprezentáció 2. Probléma redukció 3. Probléma dekompozíció 4. Logikai reprezentáció robot-szerkezet építése cél-meghatározás érzékelés, alakfelismerés
Cselekvési tervek generálása. Máté Annamária
 Cselekvési tervek generálása Máté Annamária Tartalom Általánosan a cselekvés tervezésről Értelmezés, megközelítés Klasszikus modellek Mint keresés Mint logikai következtetés Alapvető feltevések és fogalmak
Cselekvési tervek generálása Máté Annamária Tartalom Általánosan a cselekvés tervezésről Értelmezés, megközelítés Klasszikus modellek Mint keresés Mint logikai következtetés Alapvető feltevések és fogalmak
II. Állapottér-reprezentáció
 II. Állapottér-reprezentáció 1 Állapottér-reprezentáció elemei Állapottér: a feladat homlokterében álló adategyüttes (objektum) lehetséges értékeinek (állapotainak) halmaza lényegében egyetlen típusérték-halmaz
II. Állapottér-reprezentáció 1 Állapottér-reprezentáció elemei Állapottér: a feladat homlokterében álló adategyüttes (objektum) lehetséges értékeinek (állapotainak) halmaza lényegében egyetlen típusérték-halmaz
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 007/008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció i stratégiák Szemantikus hálók / Keretrendszerek
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 007/008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció i stratégiák Szemantikus hálók / Keretrendszerek
ROBOTIKA. Kürti. Levente
 ROBOTIKA Kürti Levente Megnevezés Robot: a cseh robota szóból származik = munka teljes egész szében ember által készk szített szerkezetek mozogni tudnak, a mozgásban több t szabadságfokkal rendelkeznek
ROBOTIKA Kürti Levente Megnevezés Robot: a cseh robota szóból származik = munka teljes egész szében ember által készk szített szerkezetek mozogni tudnak, a mozgásban több t szabadságfokkal rendelkeznek
II. Szabályalapú következtetés
 Szabályalapú következtetés lényege II. Szabályalapú következtetés Szabályalapú technikáknál az ismereteket vagy ha-akkor szerkezetű kal, vagy feltétel nélküli tényállításokkal írják le. a feladat megoldásához
Szabályalapú következtetés lényege II. Szabályalapú következtetés Szabályalapú technikáknál az ismereteket vagy ha-akkor szerkezetű kal, vagy feltétel nélküli tényállításokkal írják le. a feladat megoldásához
Logikai ágensek. Mesterséges intelligencia március 21.
 Logikai ágensek Mesterséges intelligencia 2014. március 21. Bevezetés Eddigi példák tudásra: állapotok halmaza, lehetséges operátorok, ezek költségei, heurisztikák Feltételezés: a világ (lehetséges állapotok
Logikai ágensek Mesterséges intelligencia 2014. március 21. Bevezetés Eddigi példák tudásra: állapotok halmaza, lehetséges operátorok, ezek költségei, heurisztikák Feltételezés: a világ (lehetséges állapotok
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák Szemantikus hálók
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció Gráfkeresési stratégiák Szemantikus hálók
Modellezés Gregorics Tibor Mesterséges intelligencia
 Modellezés 1. Állapottér-reprezentáció Állapottér: a probléma leírásához szükséges adatok által felvett érték-együttesek (azaz állapotok) halmaza az állapot többnyire egy összetett szerkezetű érték gyakran
Modellezés 1. Állapottér-reprezentáció Állapottér: a probléma leírásához szükséges adatok által felvett érték-együttesek (azaz állapotok) halmaza az állapot többnyire egy összetett szerkezetű érték gyakran
III. Szabályalapú logikai következtetés
 Speciális szabályalapú következtetés III. Szabályalapú logikai következtetés Ismeretek (tények, szabályok, cél) elsőrendű logikai formulák. Ezek az állítások eredeti formájukat megőrzik, ami másodlagos
Speciális szabályalapú következtetés III. Szabályalapú logikai következtetés Ismeretek (tények, szabályok, cél) elsőrendű logikai formulák. Ezek az állítások eredeti formájukat megőrzik, ami másodlagos
Problémamegoldás kereséssel. Mesterséges intelligencia március 7.
 Problémamegoldás kereséssel Mesterséges intelligencia 2014. március 7. Bevezetés Problémamegoldó ágens Kívánt állapotba vezető cselekvéseket keres Probléma megfogalmazása Megoldás megfogalmazása Keresési
Problémamegoldás kereséssel Mesterséges intelligencia 2014. március 7. Bevezetés Problémamegoldó ágens Kívánt állapotba vezető cselekvéseket keres Probléma megfogalmazása Megoldás megfogalmazása Keresési
Mesterséges intelligencia. Gregorics Tibor people.inf.elte.hu/gt/mi
 people.inf.elte.hu/gt/mi Szakirodalom Könyvek Fekete István - - Nagy Sára: Bevezetés a mesterséges intelligenciába, LSI Kiadó, Budapest, 1990, 1999. ELTE-Eötvös Kiadó, Budapest, 2006. Russel, J. S., Norvig,
people.inf.elte.hu/gt/mi Szakirodalom Könyvek Fekete István - - Nagy Sára: Bevezetés a mesterséges intelligenciába, LSI Kiadó, Budapest, 1990, 1999. ELTE-Eötvös Kiadó, Budapest, 2006. Russel, J. S., Norvig,
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 1/363
 1/6 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 Az Előadások Témái 46/6 Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció stratégiák Szemantikus hálók
1/6 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2010/2011 Az Előadások Témái 46/6 Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció stratégiák Szemantikus hálók
Algoritmizálás, adatmodellezés tanítása 6. előadás
 Algoritmizálás, adatmodellezés tanítása 6. előadás Tesztelési módszerek statikus tesztelés kódellenőrzés szintaktikus ellenőrzés szemantikus ellenőrzés dinamikus tesztelés fekete doboz módszerek fehér
Algoritmizálás, adatmodellezés tanítása 6. előadás Tesztelési módszerek statikus tesztelés kódellenőrzés szintaktikus ellenőrzés szemantikus ellenőrzés dinamikus tesztelés fekete doboz módszerek fehér
Szoftver-modellellenőrzés absztrakciós módszerekkel
 Szoftver-modellellenőrzés absztrakciós módszerekkel Hajdu Ákos Formális módszerek 2017.03.22. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék 1 BEVEZETŐ 2
Szoftver-modellellenőrzés absztrakciós módszerekkel Hajdu Ákos Formális módszerek 2017.03.22. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék 1 BEVEZETŐ 2
Bevezetés az informatikába
 Bevezetés az informatikába 6. előadás Dr. Istenes Zoltán Eötvös Loránd Tudományegyetem Informatikai Kar Programozáselmélet és Szoftvertechnológiai Tanszék Matematikus BSc - I. félév / 2008 / Budapest Dr.
Bevezetés az informatikába 6. előadás Dr. Istenes Zoltán Eötvös Loránd Tudományegyetem Informatikai Kar Programozáselmélet és Szoftvertechnológiai Tanszék Matematikus BSc - I. félév / 2008 / Budapest Dr.
Funkcionális és logikai programozás. { Márton Gyöngyvér, 2012} { Sapientia, Erdélyi Magyar Tudományegyetem }
 Funkcionális és logikai programozás { Márton Gyöngyvér, 2012} { Sapientia, Erdélyi Magyar Tudományegyetem } http://www.ms.sapientia.ro/~mgyongyi ` 1 Jelenlét: Követelmények, osztályozás Az első 4 előadáson
Funkcionális és logikai programozás { Márton Gyöngyvér, 2012} { Sapientia, Erdélyi Magyar Tudományegyetem } http://www.ms.sapientia.ro/~mgyongyi ` 1 Jelenlét: Követelmények, osztályozás Az első 4 előadáson
Kereső algoritmusok a diszkrét optimalizálás problémájához
 Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Navigáci. stervezés. Algoritmusok és alkalmazásaik. Osváth Róbert Sorbán Sámuel
 Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
2. Visszalépéses keresés
 2. Visszalépéses keresés Visszalépéses keresés A visszalépéses keresés egy olyan KR, amely globális munkaterülete: egy út a startcsúcsból az aktuális csúcsba (az útról leágazó még ki nem próbált élekkel
2. Visszalépéses keresés Visszalépéses keresés A visszalépéses keresés egy olyan KR, amely globális munkaterülete: egy út a startcsúcsból az aktuális csúcsba (az útról leágazó még ki nem próbált élekkel
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Tervkészítés Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Utasítsuk a háztartási robotunkat:
Mesterséges Intelligencia MI Tervkészítés Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Utasítsuk a háztartási robotunkat:
9. előadás. Programozás-elmélet. Programozási tételek Elemi prog. Sorozatszámítás Eldöntés Kiválasztás Lin. keresés Megszámolás Maximum.
 Programozási tételek Programozási feladatok megoldásakor a top-down (strukturált) programtervezés esetén három vezérlési szerkezetet használunk: - szekvencia - elágazás - ciklus Eddig megismertük az alábbi
Programozási tételek Programozási feladatok megoldásakor a top-down (strukturált) programtervezés esetén három vezérlési szerkezetet használunk: - szekvencia - elágazás - ciklus Eddig megismertük az alábbi
MYCIN. Szakértői rendszer
 MYCIN Szakértői rendszer Általában mycin: gombafajból nyert antibiotikum (görög) Pl: kanamycin, tobramycin, streptomycin, stb Általában szakértői rendszer vér fertőzéseinek, gyógykezeléseknek meghatározását
MYCIN Szakértői rendszer Általában mycin: gombafajból nyert antibiotikum (görög) Pl: kanamycin, tobramycin, streptomycin, stb Általában szakértői rendszer vér fertőzéseinek, gyógykezeléseknek meghatározását
GONDOLKODÁS ÉS NYELV
 GONDOLKODÁS ÉS NYELV GONDOLKODÁS A. Propozicionális B. Képzeleti Propozicionális gondolkodás Propozíció kijelentés, amely egy tényállásra vonatkozik, meghatározott viszonyban összekombinált fogalmakból
GONDOLKODÁS ÉS NYELV GONDOLKODÁS A. Propozicionális B. Képzeleti Propozicionális gondolkodás Propozíció kijelentés, amely egy tényállásra vonatkozik, meghatározott viszonyban összekombinált fogalmakból
Struktúra nélküli adatszerkezetek
 Struktúra nélküli adatszerkezetek Homogén adatszerkezetek (minden adatelem azonos típusú) osztályozása Struktúra nélküli (Nincs kapcsolat az adatelemek között.) Halmaz Multihalmaz Asszociatív 20:24 1 A
Struktúra nélküli adatszerkezetek Homogén adatszerkezetek (minden adatelem azonos típusú) osztályozása Struktúra nélküli (Nincs kapcsolat az adatelemek között.) Halmaz Multihalmaz Asszociatív 20:24 1 A
A félév során előkerülő témakörök
 A félév során előkerülő témakörök rekurzív algoritmusok rendező algoritmusok alapvető adattípusok, adatszerkezetek, és kapcsolódó algoritmusok dinamikus programozás mohó algoritmusok gráf algoritmusok
A félév során előkerülő témakörök rekurzív algoritmusok rendező algoritmusok alapvető adattípusok, adatszerkezetek, és kapcsolódó algoritmusok dinamikus programozás mohó algoritmusok gráf algoritmusok
Kereső algoritmusok a diszkrét optimalizálás problémájához
 Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
Kereső algoritmusok a diszkrét optimalizálás problémájához A. Grama, A. Gupta, G. Karypis és V. Kumar: Introduction to Parallel Computing, Addison Wesley, 2003. könyv anyaga alapján A kereső eljárások
ÍTÉLETKALKULUS (NULLADRENDŰ LOGIKA)
") ÍTÉLETKALKULUS SZINTAXIS ÍTÉLETKALKULUS (NULLADRENDŰ LOGIKA) jelkészlet elválasztó jelek: ( ) logikai műveleti jelek: ítéletváltozók (logikai változók): p, q, r,... ítéletkonstansok: T, F szintaxis szabályai
ÍTÉLETKALKULUS SZINTAXIS ÍTÉLETKALKULUS (NULLADRENDŰ LOGIKA) jelkészlet elválasztó jelek: ( ) logikai műveleti jelek: ítéletváltozók (logikai változók): p, q, r,... ítéletkonstansok: T, F szintaxis szabályai
Számítógép és programozás 2
 Számítógép és programozás 2 6. Előadás Problémaosztályok http://digitus.itk.ppke.hu/~flugi/ Emlékeztető A specifikáció egy előfeltételből és utófeltételből álló leírása a feladatnak Léteznek olyan feladatok,
Számítógép és programozás 2 6. Előadás Problémaosztályok http://digitus.itk.ppke.hu/~flugi/ Emlékeztető A specifikáció egy előfeltételből és utófeltételből álló leírása a feladatnak Léteznek olyan feladatok,
Gráfok 2. Legrövidebb utak, feszítőfák. Szoftvertervezés és -fejlesztés II. előadás. Szénási Sándor
 Gráfok 2. Legrövidebb utak, feszítőfák előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor Óbudai Egyetem,Neumann János Informatikai Kar Legrövidebb utak keresése Minimális feszítőfa keresése Gráfok 2
Gráfok 2. Legrövidebb utak, feszítőfák előadás http://nik.uni-obuda.hu/sztf2 Szénási Sándor Óbudai Egyetem,Neumann János Informatikai Kar Legrövidebb utak keresése Minimális feszítőfa keresése Gráfok 2
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Problémamegoldás kereséssel ha sötétben tapogatózunk Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Mesterséges Intelligencia MI Problémamegoldás kereséssel ha sötétben tapogatózunk Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade
Jason platform. Intelligens Elosztott Rendszerek BME-MIT, 2018
 Jason platform BDI ágensek programozási nyelvei AgentSpeak(L) Ágens viselkedése: hiedelmi állapot saját modellje, környezet modellje, más ágensek modellje kívánalmak kívánatos hiedelmi állapotok szándékok
Jason platform BDI ágensek programozási nyelvei AgentSpeak(L) Ágens viselkedése: hiedelmi állapot saját modellje, környezet modellje, más ágensek modellje kívánalmak kívánatos hiedelmi állapotok szándékok
Intelligens Rendszerek Elmélete IRE 4/32/1
 Intelligens Rendszerek Elmélete 4 IRE 4/32/1 Problémamegoldás kereséssel http://nik.uni-obuda.hu/mobil IRE 4/32/2 Egyszerű lények intelligenciája? http://www.youtube.com/watch?v=tlo2n3ymcxw&nr=1 IRE 4/32/3
Intelligens Rendszerek Elmélete 4 IRE 4/32/1 Problémamegoldás kereséssel http://nik.uni-obuda.hu/mobil IRE 4/32/2 Egyszerű lények intelligenciája? http://www.youtube.com/watch?v=tlo2n3ymcxw&nr=1 IRE 4/32/3
Adatszerkezetek Adatszerkezet fogalma. Az értékhalmaz struktúrája
 Adatszerkezetek Összetett adattípus Meghatározói: A felvehető értékek halmaza Az értékhalmaz struktúrája Az ábrázolás módja Műveletei Adatszerkezet fogalma Direkt szorzat Minden eleme a T i halmazokból
Adatszerkezetek Összetett adattípus Meghatározói: A felvehető értékek halmaza Az értékhalmaz struktúrája Az ábrázolás módja Műveletei Adatszerkezet fogalma Direkt szorzat Minden eleme a T i halmazokból
ALGEBRAI KIFEJEZÉSEK, EGYENLETEK
 ALGEBRAI KIFEJEZÉSEK, EGYENLETEK AZ ALGEBRAI KIFEJEZÉS FOGALMÁNAK KIALAKÍTÁSA (7-9. OSZTÁLY) Racionális algebrai kifejezés (betűs kifejezés): betűket és számokat a négy alapművelet véges sokszori alkalmazásával
ALGEBRAI KIFEJEZÉSEK, EGYENLETEK AZ ALGEBRAI KIFEJEZÉS FOGALMÁNAK KIALAKÍTÁSA (7-9. OSZTÁLY) Racionális algebrai kifejezés (betűs kifejezés): betűket és számokat a négy alapművelet véges sokszori alkalmazásával
Gyakorló feladatok: Formális modellek, temporális logikák, modellellenőrzés. Majzik István BME Méréstechnika és Információs Rendszerek Tanszék
 Gyakorló feladatok: Formális modellek, temporális logikák, modellellenőrzés Majzik István BME Méréstechnika és Információs Rendszerek Tanszék Formális modellek használata és értelmezése Formális modellek
Gyakorló feladatok: Formális modellek, temporális logikák, modellellenőrzés Majzik István BME Méréstechnika és Információs Rendszerek Tanszék Formális modellek használata és értelmezése Formális modellek
Emlékeztető: LR(0) elemzés. LR elemzések (SLR(1) és LR(1) elemzések)
 elemzés. LR elemzések (SLR(1) és LR(1) elemzések)") Emlékeztető Emlékeztető: LR(0) elemzés A lexikális által előállított szimbólumsorozatot balról jobbra olvassuk, a szimbólumokat az vermébe tesszük. LR elemzések (SLR() és LR() elemzések) Fordítóprogramok
Emlékeztető Emlékeztető: LR(0) elemzés A lexikális által előállított szimbólumsorozatot balról jobbra olvassuk, a szimbólumokat az vermébe tesszük. LR elemzések (SLR() és LR() elemzések) Fordítóprogramok
Hasonlósági keresés molekulagráfokon: legnagyobb közös részgráf keresése
 Hasonlósági keresés molekulagráfokon: legnagyobb közös részgráf keresése Kovács Péter ChemAxon Kft., ELTE IK kpeter@inf.elte.hu Budapest, 2018.11.06. Bevezetés Feladat: két molekulagráf legnagyobb közös
Hasonlósági keresés molekulagráfokon: legnagyobb közös részgráf keresése Kovács Péter ChemAxon Kft., ELTE IK kpeter@inf.elte.hu Budapest, 2018.11.06. Bevezetés Feladat: két molekulagráf legnagyobb közös
Logikai programozás ADMINISZTRATÍV KÉRDÉSEK KÖVETELMÉNYRENDSZER FŐBB PONTOK NÉHÁNY BIZTATÓ SZÓ
 Logikai programozás ADMINISZTRATÍV KÉRDÉSEK Bármilyen kérdéssel (akár tananyag, akár nem), örömmel, bánattal: achs.agnes@gmail.com (Ha két napon belül nem válaszolok, akkor kérek egy figyelmeztető levelet.
Logikai programozás ADMINISZTRATÍV KÉRDÉSEK Bármilyen kérdéssel (akár tananyag, akár nem), örömmel, bánattal: achs.agnes@gmail.com (Ha két napon belül nem válaszolok, akkor kérek egy figyelmeztető levelet.
Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel. Az objektumok áthaladnak a többi objektumon
 Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Formális szemantika. Kifejezések szemantikája. Horpácsi Dániel ELTE Informatikai Kar
 Formális szemantika Kifejezések szemantikája Horpácsi Dániel ELTE Informatikai Kar 2016-2017-2 Az előadás témája Egyszerű kifejezések formális szemantikája Az első lépés a programozási nyelvek szemantikájának
Formális szemantika Kifejezések szemantikája Horpácsi Dániel ELTE Informatikai Kar 2016-2017-2 Az előadás témája Egyszerű kifejezések formális szemantikája Az első lépés a programozási nyelvek szemantikájának
2. Visszalépéses stratégia
 2. Visszalépéses stratégia A visszalépéses keres rendszer olyan KR, amely globális munkaterülete: út a startcsúcsból az aktuális csúcsba (ezen kívül a még ki nem próbált élek nyilvántartása) keresés szabályai:
2. Visszalépéses stratégia A visszalépéses keres rendszer olyan KR, amely globális munkaterülete: út a startcsúcsból az aktuális csúcsba (ezen kívül a még ki nem próbált élek nyilvántartása) keresés szabályai:
ADATBÁZIS-KEZELÉS. Relációalgebra, 5NF
 ADATBÁZIS-KEZELÉS Relációalgebra, 5NF ABSZTRAKT LEKÉRDEZŐ NYELVEK relációalgebra relációkalkulus rekord alapú tartomány alapú Relációalgebra a matematikai halmazelméleten alapuló lekérdező nyelv a lekérdezés
ADATBÁZIS-KEZELÉS Relációalgebra, 5NF ABSZTRAKT LEKÉRDEZŐ NYELVEK relációalgebra relációkalkulus rekord alapú tartomány alapú Relációalgebra a matematikai halmazelméleten alapuló lekérdező nyelv a lekérdezés
Előfeltétel: legalább elégséges jegy Diszkrét matematika II. (GEMAK122B) tárgyból
 tárgyból") ÜTEMTERV Programozás-elmélet c. tárgyhoz (GEMAK233B, GEMAK233-B) BSc gazdaságinformatikus, programtervező informatikus alapszakok számára Óraszám: heti 2+0, (aláírás+kollokvium, 3 kredit) 2019/20-es tanév
ÜTEMTERV Programozás-elmélet c. tárgyhoz (GEMAK233B, GEMAK233-B) BSc gazdaságinformatikus, programtervező informatikus alapszakok számára Óraszám: heti 2+0, (aláírás+kollokvium, 3 kredit) 2019/20-es tanév
S0-02 Típusmodellek (Programozás elmélet)
") S0-02 Típusmodellek (Programozás elmélet) Tartalom 1. Absztrakt adattípus 2. Adattípus specifikációja 3. Adattípus osztály 4. Paraméterátadás 5. Reprezentációs függvény 6. Öröklődés és polimorfizmus 7.
S0-02 Típusmodellek (Programozás elmélet) Tartalom 1. Absztrakt adattípus 2. Adattípus specifikációja 3. Adattípus osztály 4. Paraméterátadás 5. Reprezentációs függvény 6. Öröklődés és polimorfizmus 7.
Amortizációs költségelemzés
 Amortizációs költségelemzés Amennyiben műveleteknek egy M 1,...,M m sorozatának a futási idejét akarjuk meghatározni, akkor egy lehetőség, hogy külön-külön minden egyes művelet futási idejét kifejezzük
Amortizációs költségelemzés Amennyiben műveleteknek egy M 1,...,M m sorozatának a futási idejét akarjuk meghatározni, akkor egy lehetőség, hogy külön-külön minden egyes művelet futási idejét kifejezzük
5. Hét Sorrendi hálózatok
 5. Hét Sorrendi hálózatok Digitális technika 2015/2016 Bevezető példák Példa 1: Italautomata Legyen az általunk vizsgált rendszer egy italautomata, amelyről az alábbi dolgokat tudjuk: 150 Ft egy üdítő
5. Hét Sorrendi hálózatok Digitális technika 2015/2016 Bevezető példák Példa 1: Italautomata Legyen az általunk vizsgált rendszer egy italautomata, amelyről az alábbi dolgokat tudjuk: 150 Ft egy üdítő
Mesterséges intelligencia 1 előadások
 VÁRTERÉSZ MAGDA Mesterséges intelligencia 1 előadások 2006/07-es tanév Tartalomjegyzék 1. A problémareprezentáció 4 1.1. Az állapottér-reprezentáció.................................................. 5
VÁRTERÉSZ MAGDA Mesterséges intelligencia 1 előadások 2006/07-es tanév Tartalomjegyzék 1. A problémareprezentáció 4 1.1. Az állapottér-reprezentáció.................................................. 5
Dunaújvárosi Főiskola Informatikai Intézet. Intelligens ágensek. Dr. Seebauer Márta. főiskolai tanár
 Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Bánsághi Anna 2014 Bánsághi Anna 1 of 68
 IMPERATÍV PROGRAMOZÁS Bánsághi Anna anna.bansaghi@mamikon.net 3. ELŐADÁS - PROGRAMOZÁSI TÉTELEK 2014 Bánsághi Anna 1 of 68 TEMATIKA I. ALAPFOGALMAK, TUDOMÁNYTÖRTÉNET II. IMPERATÍV PROGRAMOZÁS Imperatív
IMPERATÍV PROGRAMOZÁS Bánsághi Anna anna.bansaghi@mamikon.net 3. ELŐADÁS - PROGRAMOZÁSI TÉTELEK 2014 Bánsághi Anna 1 of 68 TEMATIKA I. ALAPFOGALMAK, TUDOMÁNYTÖRTÉNET II. IMPERATÍV PROGRAMOZÁS Imperatív
ködös határ (félreértés, hiba)
") probléma formálisan specifikált: valós világ (domain) (hibás eredmény) ködös határ (félreértés, hiba) formális világ (megoldás) A szoftver fejlesztőnek meg kell értenie a felhasználó problémáját. A specifikáció
probléma formálisan specifikált: valós világ (domain) (hibás eredmény) ködös határ (félreértés, hiba) formális világ (megoldás) A szoftver fejlesztőnek meg kell értenie a felhasználó problémáját. A specifikáció
Logika es sz am ıt aselm elet I. r esz Logika 1/36
 1/36 Logika és számításelmélet I. rész Logika 2/36 Elérhetőségek Tejfel Máté Déli épület, 2.606 matej@inf.elte.hu http://matej.web.elte.hu Tankönyv 3/36 Tartalom 4/36 Bevezető fogalmak Ítéletlogika Ítéletlogika
1/36 Logika és számításelmélet I. rész Logika 2/36 Elérhetőségek Tejfel Máté Déli épület, 2.606 matej@inf.elte.hu http://matej.web.elte.hu Tankönyv 3/36 Tartalom 4/36 Bevezető fogalmak Ítéletlogika Ítéletlogika
FUNKCIONÁLIS PROGRAMOZÁS
 FUNKCIONÁLIS PROGRAMOZÁS A funkcionális programozás néhány jellemzője Funkcionális programozás 1-2 Funkcionális, más néven applikatív programozás Funkcionális = függvényalapú, függvényközpontú Applikatív
FUNKCIONÁLIS PROGRAMOZÁS A funkcionális programozás néhány jellemzője Funkcionális programozás 1-2 Funkcionális, más néven applikatív programozás Funkcionális = függvényalapú, függvényközpontú Applikatív
Adatszerkezetek I. 7. előadás. (Horváth Gyula anyagai felhasználásával)
") Adatszerkezetek I. 7. előadás (Horváth Gyula anyagai felhasználásával) Bináris fa A fa (bináris fa) rekurzív adatszerkezet: BinFa:= Fa := ÜresFa Rekord(Elem,BinFa,BinFa) ÜresFa Rekord(Elem,Fák) 2/37 Bináris
Adatszerkezetek I. 7. előadás (Horváth Gyula anyagai felhasználásával) Bináris fa A fa (bináris fa) rekurzív adatszerkezet: BinFa:= Fa := ÜresFa Rekord(Elem,BinFa,BinFa) ÜresFa Rekord(Elem,Fák) 2/37 Bináris
5. SOR. Üres: S Sorba: S E S Sorból: S S E Első: S E
 5. SOR A sor adatszerkezet is ismerős a mindennapokból, például a várakozási sornak számos előfordulásával van dolgunk, akár emberekről akár tárgyakról (pl. munkadarabokról) legyen szó. A sor adattípus
5. SOR A sor adatszerkezet is ismerős a mindennapokból, például a várakozási sornak számos előfordulásával van dolgunk, akár emberekről akár tárgyakról (pl. munkadarabokról) legyen szó. A sor adattípus
Ellenőrző kérdések. 36. Ha t szintű indexet használunk, mennyi a keresési költség blokkműveletek számában mérve? (1 pont) log 2 (B(I (t) )) + t
 log 2 (B(I (t) )) + t") Ellenőrző kérdések 2. Kis dolgozat kérdései 36. Ha t szintű indexet használunk, mennyi a keresési költség blokkműveletek számában mérve? (1 pont) log 2 (B(I (t) )) + t 37. Ha t szintű indexet használunk,
Ellenőrző kérdések 2. Kis dolgozat kérdései 36. Ha t szintű indexet használunk, mennyi a keresési költség blokkműveletek számában mérve? (1 pont) log 2 (B(I (t) )) + t 37. Ha t szintű indexet használunk,
Számítógép és programozás 2
 Számítógép és programozás 2 11. Előadás Halmazkeresések, dinamikus programozás http://digitus.itk.ppke.hu/~flugi/ A keresési feladat megoldása Legyen a lehetséges megoldások halmaza M ciklus { X legyen
Számítógép és programozás 2 11. Előadás Halmazkeresések, dinamikus programozás http://digitus.itk.ppke.hu/~flugi/ A keresési feladat megoldása Legyen a lehetséges megoldások halmaza M ciklus { X legyen
V. Kétszemélyes játékok
 Teljes információjú, véges, zéró összegű kétszemélyes játékok V. Kétszemélyes játékok Két játékos lép felváltva adott szabályok szerint. Mindkét játékos ismeri a maga és az ellenfele összes választási
Teljes információjú, véges, zéró összegű kétszemélyes játékok V. Kétszemélyes játékok Két játékos lép felváltva adott szabályok szerint. Mindkét játékos ismeri a maga és az ellenfele összes választási
Java programozási nyelv
 Java programozási nyelv 2. rész Vezérlő szerkezetek Nyugat-Magyarországi Egyetem Faipari Mérnöki Kar Informatikai Intézet Soós Sándor 2005. szeptember A Java programozási nyelv Soós Sándor 1/23 Tartalomjegyzék
Java programozási nyelv 2. rész Vezérlő szerkezetek Nyugat-Magyarországi Egyetem Faipari Mérnöki Kar Informatikai Intézet Soós Sándor 2005. szeptember A Java programozási nyelv Soós Sándor 1/23 Tartalomjegyzék
... fi. ... fk. 6. Fabejáró algoritmusok Rekurzív preorder bejárás (elsőfiú-testvér ábrázolásra)
") 6. Fabejáró algoritmusok Fa bejárásán olyan algoritmust értünk, amelynek bemenete egy F fa és egy M művelet, és az algoritmus adott sorrendben pontosan egyszer végrehajtja az M műveletet a fa pontjaiban
6. Fabejáró algoritmusok Fa bejárásán olyan algoritmust értünk, amelynek bemenete egy F fa és egy M művelet, és az algoritmus adott sorrendben pontosan egyszer végrehajtja az M műveletet a fa pontjaiban
Knoch László: Információelmélet LOGIKA
 Mi az ítélet? Az ítélet olyan mondat, amely vagy igaz, vagy hamis. Azt, hogy az adott ítélet igaz vagy hamis, az ítélet logikai értékének nevezzük. Jelölése: i igaz h hamis A 2 páros és prím. Logikai értéke
Mi az ítélet? Az ítélet olyan mondat, amely vagy igaz, vagy hamis. Azt, hogy az adott ítélet igaz vagy hamis, az ítélet logikai értékének nevezzük. Jelölése: i igaz h hamis A 2 páros és prím. Logikai értéke
Programok értelmezése
 Programok értelmezése Kód visszafejtés. Izsó Tamás 2016. szeptember 22. Izsó Tamás Programok értelmezése/ 1 Section 1 Programok értelmezése Izsó Tamás Programok értelmezése/ 2 programok szemantika értelmezése
Programok értelmezése Kód visszafejtés. Izsó Tamás 2016. szeptember 22. Izsó Tamás Programok értelmezése/ 1 Section 1 Programok értelmezése Izsó Tamás Programok értelmezése/ 2 programok szemantika értelmezése
Algoritmusok. Hogyan csináljam?
 Algoritmusok Hogyan csináljam? 1 Az algoritmus fogalma Algoritmusnak olyan pontos előírást nevezünk, amely megmondja, hogy bizonyos feladat megoldásakor milyen műveleteket milyen meghatározott sorrendben
Algoritmusok Hogyan csináljam? 1 Az algoritmus fogalma Algoritmusnak olyan pontos előírást nevezünk, amely megmondja, hogy bizonyos feladat megoldásakor milyen műveleteket milyen meghatározott sorrendben
bármely másikra el lehessen jutni. A vállalat tudja, hogy tetszőlegesen adott
 . Minimális súlyú feszítő fa keresése Képzeljük el, hogy egy útépítő vállalat azt a megbízást kapja, hogy építsen ki egy úthálózatot néhány település között (a települések között jelenleg nincs út). feltétel
. Minimális súlyú feszítő fa keresése Képzeljük el, hogy egy útépítő vállalat azt a megbízást kapja, hogy építsen ki egy úthálózatot néhány település között (a települések között jelenleg nincs út). feltétel
Adatszerkezetek II. 1. előadás
 Adatszerkezetek II. 1. előadás Gráfok A gráf fogalma: Gráf(P,E): P pontok (csúcsok) és E P P élek halmaza Fogalmak: Irányított gráf : (p 1,p 2 ) E-ből nem következik, hogy (p 2,p 1 ) E Irányítatlan gráf
Adatszerkezetek II. 1. előadás Gráfok A gráf fogalma: Gráf(P,E): P pontok (csúcsok) és E P P élek halmaza Fogalmak: Irányított gráf : (p 1,p 2 ) E-ből nem következik, hogy (p 2,p 1 ) E Irányítatlan gráf
Készítette: Nagy Tibor István
 Készítette: Nagy Tibor István Operátorok Műveletek Egy (vagy több) műveleti jellel írhatók le A műveletet operandusaikkal végzik Operátorok fajtái operandusok száma szerint: egyoperandusú operátorok (pl.:
Készítette: Nagy Tibor István Operátorok Műveletek Egy (vagy több) műveleti jellel írhatók le A műveletet operandusaikkal végzik Operátorok fajtái operandusok száma szerint: egyoperandusú operátorok (pl.:
Programozási nyelvek 6. előadás
 Programozási nyelvek 6. előadás Szempontok Programozási nyelvek osztályozása Felhasználói kör (amatőr, professzionális) Emberközelség (gépi nyelvektől a természetes nyelvekig) Számítási modell (hogyan
Programozási nyelvek 6. előadás Szempontok Programozási nyelvek osztályozása Felhasználói kör (amatőr, professzionális) Emberközelség (gépi nyelvektől a természetes nyelvekig) Számítási modell (hogyan
Az optimális megoldást adó algoritmusok
 Az optimális megoldást adó algoritmusok shop ütemezés esetén Ebben a fejezetben olyan modellekkel foglalkozunk, amelyekben a munkák több műveletből állnak. Speciálisan shop ütemezési problémákat vizsgálunk.
Az optimális megoldást adó algoritmusok shop ütemezés esetén Ebben a fejezetben olyan modellekkel foglalkozunk, amelyekben a munkák több műveletből állnak. Speciálisan shop ütemezési problémákat vizsgálunk.
Branch-and-Bound. 1. Az egészértéketű programozás. a korlátozás és szétválasztás módszere Bevezető Definíció. 11.
 11. gyakorlat Branch-and-Bound a korlátozás és szétválasztás módszere 1. Az egészértéketű programozás 1.1. Bevezető Bizonyos feladatok modellezése kapcsán előfordulhat olyan eset, hogy a megoldás során
11. gyakorlat Branch-and-Bound a korlátozás és szétválasztás módszere 1. Az egészértéketű programozás 1.1. Bevezető Bizonyos feladatok modellezése kapcsán előfordulhat olyan eset, hogy a megoldás során
A C# programozási nyelv alapjai
 A C# programozási nyelv alapjai Tisztán objektum-orientált Kis- és nagybetűket megkülönbözteti Ötvözi a C++, Delphi, Java programozási nyelvek pozitívumait.net futtatókörnyezet Visual Studio fejlesztőkörnyezet
A C# programozási nyelv alapjai Tisztán objektum-orientált Kis- és nagybetűket megkülönbözteti Ötvözi a C++, Delphi, Java programozási nyelvek pozitívumait.net futtatókörnyezet Visual Studio fejlesztőkörnyezet
1. Alapfogalmak Algoritmus Számítási probléma Specifikáció Algoritmusok futási ideje
 1. Alapfogalmak 1.1. Algoritmus Az algoritmus olyan elemi műveletekből kompozíciós szabályok szerint felépített összetett művelet, amelyet megadott feltételt teljesítő bemeneti adatra végrehajtva, a megkívánt
1. Alapfogalmak 1.1. Algoritmus Az algoritmus olyan elemi műveletekből kompozíciós szabályok szerint felépített összetett művelet, amelyet megadott feltételt teljesítő bemeneti adatra végrehajtva, a megkívánt
Mesterséges intelligencia 2. laborgyakorlat
 Mesterséges intelligencia 2. laborgyakorlat Keresési módszerek A legtöbb feladatot meg lehet határozni keresési feladatként: egy ún. állapottérben, amely tartalmazza az összes lehetséges állapotot fogjuk
Mesterséges intelligencia 2. laborgyakorlat Keresési módszerek A legtöbb feladatot meg lehet határozni keresési feladatként: egy ún. állapottérben, amely tartalmazza az összes lehetséges állapotot fogjuk
Bánsághi Anna 2014 Bánsághi Anna 1 of 33
 IMPERATÍV PROGRAMOZÁS Bánsághi Anna anna.bansaghi@mamikon.net 7. ELŐADÁS - ABSZTRAKT ADATTÍPUS 2014 Bánsághi Anna 1 of 33 TEMATIKA I. ALAPFOGALMAK, TUDOMÁNYTÖRTÉNET II. IMPERATÍV PROGRAMOZÁS Imperatív
IMPERATÍV PROGRAMOZÁS Bánsághi Anna anna.bansaghi@mamikon.net 7. ELŐADÁS - ABSZTRAKT ADATTÍPUS 2014 Bánsághi Anna 1 of 33 TEMATIKA I. ALAPFOGALMAK, TUDOMÁNYTÖRTÉNET II. IMPERATÍV PROGRAMOZÁS Imperatív
Osztott rendszer. Osztott rendszer informális definíciója
 Osztott rendszer Osztott rendszer informális definíciója Egymástól elkülönülten létező program-komponensek egy halmaza. A komponensek egymástól függetlenül dolgoznak saját erőforrásukkal. A komponensek
Osztott rendszer Osztott rendszer informális definíciója Egymástól elkülönülten létező program-komponensek egy halmaza. A komponensek egymástól függetlenül dolgoznak saját erőforrásukkal. A komponensek
Mesterséges Intelligencia Cselekvéstervezés
 Mesterséges Intelligencia Cselekvéstervezés Kovács András MTA SZTAKI, akovacs@sztaki.hu 2018.10.11. Cselekvéstervezési feladatok Logisztikai hálózatok Küldeményeket juttatnánk el feladási helyükről célállomásukra
Mesterséges Intelligencia Cselekvéstervezés Kovács András MTA SZTAKI, akovacs@sztaki.hu 2018.10.11. Cselekvéstervezési feladatok Logisztikai hálózatok Küldeményeket juttatnánk el feladási helyükről célállomásukra
ELEMI PROGRAMOZÁSI TÉTELEK
 ELEMI PROGRAMOZÁSI TÉTELEK 1. FELADATMEGOLDÁS PROGRAMOZÁSI TÉTELEKKEL 1.1 A programozási tétel fogalma A programozási tételek típusalgoritmusok, amelyek alkalmazásával garantáltan helyes megoldást adhatunk
ELEMI PROGRAMOZÁSI TÉTELEK 1. FELADATMEGOLDÁS PROGRAMOZÁSI TÉTELEKKEL 1.1 A programozási tétel fogalma A programozási tételek típusalgoritmusok, amelyek alkalmazásával garantáltan helyes megoldást adhatunk
2018, Diszkrét matematika
 Diszkrét matematika 12. előadás mgyongyi@ms.sapientia.ro Sapientia Egyetem, Matematika-Informatika Tanszék Marosvásárhely, ománia 2018, őszi félév Miről volt szó az elmúlt előadáson? a diszkrét logaritmus,
Diszkrét matematika 12. előadás mgyongyi@ms.sapientia.ro Sapientia Egyetem, Matematika-Informatika Tanszék Marosvásárhely, ománia 2018, őszi félév Miről volt szó az elmúlt előadáson? a diszkrét logaritmus,
Információk. Ismétlés II. Ismétlés. Ismétlés III. A PROGRAMOZÁS ALAPJAI 2. Készítette: Vénné Meskó Katalin. Algoritmus. Algoritmus ábrázolása
 1 Információk 2 A PROGRAMOZÁS ALAPJAI 2. Készítette: Vénné Meskó Katalin Elérhetőség mesko.katalin@tfk.kefo.hu Fogadóóra: szerda 9:50-10:35 Számonkérés időpontok Április 25. 9 00 Május 17. 9 00 Június
1 Információk 2 A PROGRAMOZÁS ALAPJAI 2. Készítette: Vénné Meskó Katalin Elérhetőség mesko.katalin@tfk.kefo.hu Fogadóóra: szerda 9:50-10:35 Számonkérés időpontok Április 25. 9 00 Május 17. 9 00 Június
Robotok inverz geometriája
 Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Robotok inverz geometriája. A gyakorlat célja Inverz geometriai feladatot megvalósító függvények implementálása. A megvalósított függvénycsomag tesztelése egy kétszabadságfokú kar előírt végberendezés
Az alállomási kezelést támogató szakértői funkciók
 Az alállomási kezelést támogató szakértői funkciók dr. Kovács Attila Szakértői rendszerek Emberi szakértő kompetenciájával, tudásával rendelkező rendszer Jellemzői: Számítási műveletek helyett logikai
Az alállomási kezelést támogató szakértői funkciók dr. Kovács Attila Szakértői rendszerek Emberi szakértő kompetenciájával, tudásával rendelkező rendszer Jellemzői: Számítási műveletek helyett logikai
NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő
 SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
SZÉCHENYI ISTVÁN EGYETEM Műszaki Tudományi Kar Informatika Tanszék BSC FOKOZATÚ MÉRNÖK INFORMATIKUS SZAK NGB_IN040_1 SZIMULÁCIÓS TECHNIKÁK dr. Pozna Claudio Radu, Horváth Ernő Fejlesztői dokumentáció GROUP#6
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA. 1. előadás. Dr. Pintér József. Robottechnika
 ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
ROBOTTECHNIKA FEJLŐDÉSTÖRTÉNET, ALKALMAZÁSOK, ROBOT FOGALMA 1. előadás Dr. Pintér József 1 Tananyag vázlata IPARI ROBOTOK fejlődésének áttekintése A robot szó eredete, alkalmazási területek, a "kiábrándulás"
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék
 Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék 06/7. félév 7. Előadás Dr. Kulcsár Gyula egyetemi docens Tartalom. A projektütemezés alapjai..
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék 06/7. félév 7. Előadás Dr. Kulcsár Gyula egyetemi docens Tartalom. A projektütemezés alapjai..
Gépi tanulás a gyakorlatban. Lineáris regresszió
 Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
GROVER-algoritmus. Sinkovicz Péter. ELTE, MSc II dec.15.
 ELTE, MSc II. 2011.dec.15. Áttekintés Feladat Algoritmus Kvantum keresési algoritmus áttekintése Input: N = 2 n elemű tömb, Ψ 1 = 0 1 kezdőállapot, f x0 (x) orákulum függvény. Output: x 0 keresett elem
ELTE, MSc II. 2011.dec.15. Áttekintés Feladat Algoritmus Kvantum keresési algoritmus áttekintése Input: N = 2 n elemű tömb, Ψ 1 = 0 1 kezdőállapot, f x0 (x) orákulum függvény. Output: x 0 keresett elem
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Kényszerkielégítési problémák (Constraint Satisfaction Problem, CSP) http://mialmanach.mit.bme.hu/aima/ch05 Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki
Mesterséges Intelligencia MI Kényszerkielégítési problémák (Constraint Satisfaction Problem, CSP) http://mialmanach.mit.bme.hu/aima/ch05 Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki
Automatikus következtetés
 Automatikus következtetés 1. Rezolúció Feladat: A 1 : Ha süt a nap, akkor Péter strandra megy. A 2 : Ha Péter strandra megy, akkor úszik. A 3 : Péternek nincs lehetősége otthon úszni. Lássuk be, hogy ezekből
Automatikus következtetés 1. Rezolúció Feladat: A 1 : Ha süt a nap, akkor Péter strandra megy. A 2 : Ha Péter strandra megy, akkor úszik. A 3 : Péternek nincs lehetősége otthon úszni. Lássuk be, hogy ezekből
ALAPFOGALMAK 1. A reláció az program programfüggvénye, ha. Azt mondjuk, hogy az feladat szigorúbb, mint az feladat, ha
 ALAPFOGALMAK 1 Á l l a p o t t é r Legyen I egy véges halmaz és legyenek A i, i I tetszőleges véges vagy megszámlálható, nem üres halmazok Ekkor az A= A i halmazt állapottérnek, az A i halmazokat pedig
ALAPFOGALMAK 1 Á l l a p o t t é r Legyen I egy véges halmaz és legyenek A i, i I tetszőleges véges vagy megszámlálható, nem üres halmazok Ekkor az A= A i halmazt állapottérnek, az A i halmazokat pedig
Webprogramozás szakkör
 Webprogramozás szakkör Előadás 5 (2012.04.09) Programozás alapok Eddig amit láttunk: Programozás lépései o Feladat leírása (specifikáció) o Algoritmizálás, tervezés (folyamatábra, pszeudokód) o Programozás
Webprogramozás szakkör Előadás 5 (2012.04.09) Programozás alapok Eddig amit láttunk: Programozás lépései o Feladat leírása (specifikáció) o Algoritmizálás, tervezés (folyamatábra, pszeudokód) o Programozás
Programozás nyelvek a közoktatásban 1. előadás
 Programozás nyelvek a közoktatásban 1. előadás Alapelve Prolog Programozás a matematikai logika segítségével Egy logikai program logikai állítások halmaza Egy logikai program futása egy következtetési
Programozás nyelvek a közoktatásban 1. előadás Alapelve Prolog Programozás a matematikai logika segítségével Egy logikai program logikai állítások halmaza Egy logikai program futása egy következtetési
Modellellenőrzés. dr. Majzik István BME Méréstechnika és Információs Rendszerek Tanszék
 Modellellenőrzés dr. Majzik István BME Méréstechnika és Információs Rendszerek Tanszék 1 Mit szeretnénk elérni? Informális vagy félformális tervek Informális követelmények Formális modell: KS, LTS, TA
Modellellenőrzés dr. Majzik István BME Méréstechnika és Információs Rendszerek Tanszék 1 Mit szeretnénk elérni? Informális vagy félformális tervek Informális követelmények Formális modell: KS, LTS, TA
Elsőrendű logika. Mesterséges intelligencia március 28.
 Elsőrendű logika Mesterséges intelligencia 2014. március 28. Bevezetés Ítéletkalkulus: deklaratív nyelv (mondatok és lehetséges világok közti igazságrelációk) Részinformációkat is kezel (diszjunkció, negáció)
Elsőrendű logika Mesterséges intelligencia 2014. március 28. Bevezetés Ítéletkalkulus: deklaratív nyelv (mondatok és lehetséges világok közti igazságrelációk) Részinformációkat is kezel (diszjunkció, negáció)
Algoritmusok és adatszerkezetek I. 1. előadás
 Algoritmusok és adatszerkezetek I 1 előadás Típusok osztályozása Összetettség (strukturáltság) szempontjából: elemi (vagy skalár, vagy strukturálatlan) összetett (más szóval strukturált) Strukturálási
Algoritmusok és adatszerkezetek I 1 előadás Típusok osztályozása Összetettség (strukturáltság) szempontjából: elemi (vagy skalár, vagy strukturálatlan) összetett (más szóval strukturált) Strukturálási
Logika és informatikai alkalmazásai
 Logika és informatikai alkalmazásai 4. gyakorlat Németh L. Zoltán http://www.inf.u-szeged.hu/~zlnemeth SZTE, Informatikai Tanszékcsoport 2011 tavasz Irodalom Szükséges elmélet a mai gyakorlathoz Előadás
Logika és informatikai alkalmazásai 4. gyakorlat Németh L. Zoltán http://www.inf.u-szeged.hu/~zlnemeth SZTE, Informatikai Tanszékcsoport 2011 tavasz Irodalom Szükséges elmélet a mai gyakorlathoz Előadás
Mesterséges intelligencia
 Mesterséges intelligencia Problémák és az útkeresések kapcsolata Az MI problémái, hogy a megoldandó feladatai nehezek, hatalmas a lehetséges válaszok tere (problématér), a helyes válaszok megtalálása intuíciót,
Mesterséges intelligencia Problémák és az útkeresések kapcsolata Az MI problémái, hogy a megoldandó feladatai nehezek, hatalmas a lehetséges válaszok tere (problématér), a helyes válaszok megtalálása intuíciót,
1. Milyen hatással van a heurisztika általában a keresõ rendszerek mûködésére?
 2012. 06. 20. 1. Milyen hatással van a heurisztika általában a keresõ rendszerek mûködésére? A heurisztika olyan, a feladathoz kapcsolódó ötlet, amelyet közvetlenül építünk be egy algoritmusba, azért,
2012. 06. 20. 1. Milyen hatással van a heurisztika általában a keresõ rendszerek mûködésére? A heurisztika olyan, a feladathoz kapcsolódó ötlet, amelyet közvetlenül építünk be egy algoritmusba, azért,
Excel 2010 függvények
 Molnár Mátyás Excel 2010 függvények Csak a lényeg érthetően! Tartalomjegyzék FÜGGVÉNYHASZNÁLAT ALAPJAI 1 FÜGGVÉNYEK BEVITELE 1 HIBAÉRTÉKEK KEZELÉSE 4 A VARÁZSLATOS AUTOSZUM GOMB 6 SZÁMÍTÁSOK A REJTETT
Molnár Mátyás Excel 2010 függvények Csak a lényeg érthetően! Tartalomjegyzék FÜGGVÉNYHASZNÁLAT ALAPJAI 1 FÜGGVÉNYEK BEVITELE 1 HIBAÉRTÉKEK KEZELÉSE 4 A VARÁZSLATOS AUTOSZUM GOMB 6 SZÁMÍTÁSOK A REJTETT
van neve lehetnek bemeneti paraméterei (argumentumai) lehet visszatérési értéke a függvényt úgy használjuk, hogy meghívjuk
 lehet visszatérési értéke a függvényt úgy használjuk, hogy meghívjuk") függvények ismétlése lista fogalma, használata Game of Life program (listák használatának gyakorlása) listák másolása (alap szintű, teljes körű) Reversi 2 Emlékeztető a függvények lényegében mini-programok,
függvények ismétlése lista fogalma, használata Game of Life program (listák használatának gyakorlása) listák másolása (alap szintű, teljes körű) Reversi 2 Emlékeztető a függvények lényegében mini-programok,
30. ERŐSEN ÜSSZEFÜGGŐ KOMPONENSEK
 30. ERŐSEN ÜSSZEFÜGGŐ KOMPONENSEK A gráfos alkalmazások között is találkozunk olyan problémákkal, amelyeket megoldását a részekre bontott gráfon határozzuk meg, majd ezeket alkalmas módon teljes megoldássá
30. ERŐSEN ÜSSZEFÜGGŐ KOMPONENSEK A gráfos alkalmazások között is találkozunk olyan problémákkal, amelyeket megoldását a részekre bontott gráfon határozzuk meg, majd ezeket alkalmas módon teljes megoldássá
A modellellenőrzés érdekes alkalmazása: Tesztgenerálás modellellenőrzővel
 A modellellenőrzés érdekes alkalmazása: Tesztgenerálás modellellenőrzővel Majzik István Micskei Zoltán BME Méréstechnika és Információs Rendszerek Tanszék 1 Modell alapú fejlesztési folyamat (részlet)
A modellellenőrzés érdekes alkalmazása: Tesztgenerálás modellellenőrzővel Majzik István Micskei Zoltán BME Méréstechnika és Információs Rendszerek Tanszék 1 Modell alapú fejlesztési folyamat (részlet)