Korszerű információs technológiák
|
|
|
- Gábor Vilmos Bakos
- 5 évvel ezelőtt
- Látták:
Átírás
1 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Korszerű információs technológiák Megerősítéses tanulási módszerek és alkalmazásaik Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, szeptember 21.

2 Tartalom Gépi tanulás története Gépi tanulás típusai A megerősítéses tanulás Q-learning SARSA Fuzzy logika FRIQ-learning FRIQ-learning Maze, Pong alkalmazás példák

3 A gépi tanulás története 1947-ben Arthur Lee Samuel dáma játék, ami képes legyőzni a világbajnokot motiváló okok: szimbolikus számítás hatékonyságának bemutatása szükség van PC-re az egyetemeken 20 évnyi fejlesztés gépi tanulás alappillérjeinek megalkotása
4 A gépi tanulás A gépi tanulás alapgondolata egy ágens képességeinek javítása mi az az ágens?: ágens bármi lehet, amit úgy tekinthetünk, mint ami az érzékelői segítségével érzékeli a környezetét, és beavatkozói segítségével megváltoztatja azt. az ágens viselkedését az ágensfüggvény írja le, ami az adott érzékelési sorozatot egy cselekvésre képezi le.

5 A gépi tanulás A gépi tanulás egy eljárás, amely a rendszerben változásokat hoz létre a változtatások következtében a problémát a rendszer már helyesebben oldja meg alkalmazás területei: képfeldolgozás adatbányászat hangfelismerés optika karakterfelismerés stb
, (x i,y i ): x i minta, y i osztálycímke egyosztályos, kétosztályos, regressszió Felügyelet nélküli (nem ellenőrzött, unsupervised learning nem adottak az osztálycímkék pl klaszterezés")
6 A gépi tanulás formái Felügyelt (ellenőrzött, supervised learning ) példákhoz helyes osztálycímkék a feladat a még nem ismert példákhoz a hozzájuk tartozó osztálycímke megmondása a minták alapján (x 1,y 1 ), (x i,y i ): x i minta, y i osztálycímke egyosztályos, kétosztályos, regressszió Felügyelet nélküli (nem ellenőrzött, unsupervised learning nem adottak az osztálycímkék pl klaszterezés Megerősítéses reinforcement learning
 jutalmak/büntetések (sikerek/kudarcok) cél: várható jutalmak maximalizálása (optimális stratégia keresése) Pl.")
7 A megerősítéses tanulás Egy módszer, amely megerősítési információk alapján tanul a környezetből érkező visszajelzések a megerősítések (reward) jutalmak/büntetések (sikerek/kudarcok) cél: várható jutalmak maximalizálása (optimális stratégia keresése) Pl.: egy ismeretlen játék játszása
 cél: cselekvésérték-függvény")
8 A megerősítéses tanulás típusa Passzív rögzített stratégia -> viselkedés cél: stratégia jóságának megtanulása Aktív nincs rögzített stratégia cselekvés választásának eldöntése (mohó például) cél: cselekvésérték-függvény tanulása
 értékelő függvény (value funciton) környezet modellje (model of the")
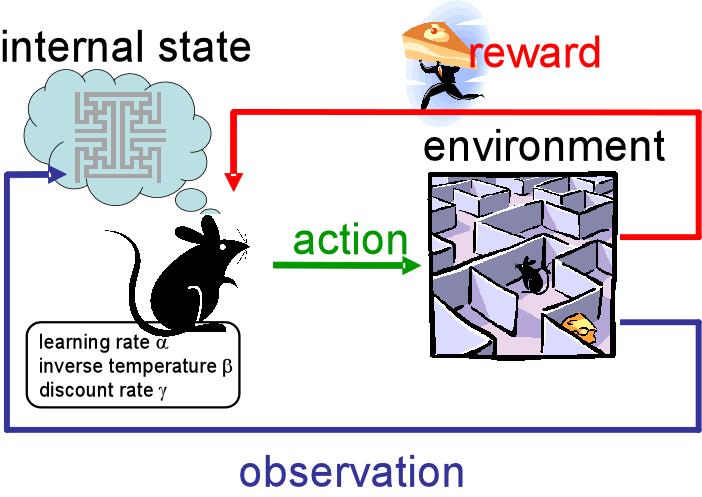
9 A megerősítéses tanulás elemei állapot (s), akció (a), jutalom (r) politika (policy) jutalom függvény (reward function) értékelő függvény (value funciton) környezet modellje (model of the environment) 9
10 Ágens-környezet modell
11 Ágens-környezet modell példa
12 Ágens-környezet modell ágens lehet bármi, ami (érzékelőivel) érzékeli a környezetét és (beavatkozóival) megváltoztatja azt környezet determinisztikus: következő állapota, csakis a jelenlegi állapotától és a végrehajtott cselekvéstől függ nem determinisztikus: következő állapotát nem határozza meg az előző állapot és a végrehajtott cselekvés
13 Ágens-környezet modell állapot (s), akció (a), jutalom (r), politika (π) állapot: az ágens megfigyelése a környezetről akció: cselekvés, ez hat a környezetre jutalom: egyetlen szám politika: állapot-akció leképezés
14 Ágens-környezet modell diszkrét idő ( t=1, 2, 3, ) minden egyes t időpillanatban az ágens megkapja a környezet ez alapján választ egy akciót a választott akció függvényeként kap egy jutalmat majd egy új állapotba kerül az ágens célja: hosszú távon maximalizálja az összegyűjtött jutalmakat epizódikusság
15 Ágens-környezet modell a t s t s t+1 r t+1 s t : állapot a t időpillanatban a t : a végrehajtott akció a t időpillanatban r t+1 : a kapott jutalom a t+1 időpillanatban s t+1 : az új állapot Π t (s, a): s-ben a lépés a t időpontban 15
16 Ágens-környezet modell Az összegyűjtött jutalmak összegét hozamnak nevezzük: ahol T, az utolsó időpillanat ha nem beszélhetünk utolsó időpillanatról akkor: gond: R t végtelen lehet megoldás: diszkontálás, a diszkontált hozam:
17 Ágens-környezet modell Összefoglalva, a hozamfüggvény a következő formában írható fel: γ a diszkontálási paraméter: a jelen állapot jövőre vetíthetőségének mértéke. mekkora súllyal vegyük figyelembe egy későbbi állapot hasznosságát értéke: [0;1]
18 Ágens-környezet modell A feladat realizálása: interakció a környezet modellje: az átmeneti valószínűségek és jutalmak cél: maximális várható jutalom, optimális stratégia megtalálása
19 A Markov-feltevés Feltesszük, hogy a múlt nem számít Markov-tulajdonság : egy folyamat jövőbeli feltételezett állapota csak a jelenlegi állapottól függ, még akkor is, ha ismerjük a korábbi történéseket nincs emlékezés az átmeneti valószínűség megadja az s állapotba kerülés valószínűségét s állapotból a akció választása mellett: a várható jutalom: azokra a feladatokra alkalmazható a megerősítéses tanulás módszere, amelyek Markov-tulajdonságúak
20 Az állapot értékelő függvény E π jelöli a π politika követése melletti várható értéket, a t tetszőleges időpillanatban. Megadjuk az s állapotban a akció választásának értékét a π politika mellett. Ezt Q π (s,a) -val jelöljük:
21 A Bellman-egyenlet Az előzőek alapján a következő egyenlet a V π -re vonatkozó Bellman-egyenlet: egy állapot hasznosságának meghatározása egy állapot hasznossága, az állapotban tartózkodás jutalmának és a következő állapot várható hasznosságának összege az állapotok hasznosságai a Bellman-egyenletek egy rendszerének egyértelmű megoldásai
22 A Bellman-egyenlet Optimális: V*(s): s-ből indulva Q*(s,a): s-ben a A Bellman-egyenlet megoldása: dinamikus programozással értékiteráció minden egyes állapot hasznosságának számítása -> optimális cselekvés választása eljárásmód-iteráció ha egy akció jobb mint a többi -> a releváns állapotok hasznosságainak nagyságát nem szükséges precízen tudni - >értékelés;javítás. Leáll ha nincs hasznosságváltozás.
23 Megerősítéses tanulási algoritmusok Q-learning SARSA Fuzzy Q-learning FRI based Q-learning Stb.
24 Q-learning az egyik leggyakrabban alkalmazott megerősítéses tanulási módszer Q quality érték Q(s,a): s-ben a végrehajtásának jósága -> Q(s,a) párok ->Q-függvény; Q-tábla Update formula:
25 Q-learning - algoritmus
26 Q-learning - algoritmus
27 SARSA Szintén megerősítéses tanulási algoritmus State-Action-Reward-State-Action A Q-learning hasonló módszer Update formula: 27
28 SARSA - algoritmus 28
29 Q-learning vs. SARSA 29
30 Q-learning hátrány lehetséges állapotok exponenciálisan sok száma állapottér növekedése Q-tábla növekedése konvergenciája exponenciálisan lassú lehet Kb a kezelhető állapotok száma Pl. n db állapotleíró, k részre osztva: k n az állapotok száma 30


")

31 RL alkalmazások TD-Gammon (Tesauro, 1992) Robotirányítási alkalmazások inverz inga (cart-pole) mountain- car maze pong rc drift autó: video és számos egyéb... 31
32 Fuzzy logika - röviden A klasszikus halmazelmélet szerint az X tartományon definiált A halmazba egy x X elem vagy beletartozik vagy sem Leíró karakterisztikus függvény: Az emberi gondolkodás működése más! Miért? mert nincs éles elkülönítés Pl. hűvös van kijelentés. Mi számít hűvösnek? egy konkrét hőmérsékelt? 18 C vagy inkább egy tartomány? [8,11] C kicsit hűvös van kijelentéssel mi a helyzet? homokkupac paradoxon bizonytalanság

33 Fuzzy logika - röviden Hogyan lehet ezt a bizonytalanságot matematikailag kifejezni? Megoldás: Fuzzy logika Lotfi A. Zadeh
34 Fuzzy logika - röviden Az előző példában a [8,11] C hőmérséklet tartományhoz hűvös lingvisztikai változó hozzárendelése A hozzárendelés egy tagsági függvény definiálja µ hűvös : [8 C, 11 C] [0, 1] µ hűvös (t) = 1 -> t hűvös µ hűvös (t) = 0 -> t nem hűvös általánosságban: µ A (x) [0, 1], x X
35 Fuzzy logika - röviden Tagsági függvény például
36 Fuzzy logika - röviden Fuzzy irányítási rendszer
37 Fuzzy logika - röviden Szabálybázis: x X a bemeneti változó y Y a kimeneti változó vagy következtetés, X, illetve Y rendre a bemeneti, illetve kimeneti változók alaphalmaza A és B nyelvi változók. A az R szabály antecedense (előzménye), B pedig az R szabály konzekvense (következménye).
38 Fuzzy logika - röviden Illeszkedés mértékét meghatározó egység: a szabálybázis antecedens elemeit hasonlítja össze az aktuális megfigyelés függvényével vagy konkrét értékével, a tüzelő szabályoknál - tehát azon szabályoknál, ahol az antecedens rész metszete a megfigyeléssel nem üres meghatároz egy 0 és 1 közötti fuzzy illeszkedési mértéket
39 Fuzzy logika - röviden Következtető gép: lényege, hogy az illeszkedési mérték meghatározása után a kapott súlyokat valamilyen módon a fuzzy szabálybázisban található tüzelő szabályok konzekvenseivel általában egy konjunkció segítségével kombinálja.
40 Fuzzy logika - röviden Defuzzifikációs modul a következtetési algoritmus eredményül fuzzy halmazt ad gyakorlati alkalmazások esetében numerikus értékre van szükség Fuzzy halmazból ki kell választani egy konkrték értéket, amely a halmazt a legjobban jellemzi: defuzzifikálás különböző módszerek: COG, MOM, COA, COM, stb.
41 Fuzzy logika - röviden A hagyományos fuzzy következtetéssel működő fuzzy rendszerek a szabály antecedensek és a megfigyelést leíró nyelvi értékek illeszkedése alapján a szabály konzekvensek súlyozott kombinációjaként határozzák meg a következményt Fedő szabálybázis Ritka szabálybázis
42 Fuzzy logika - röviden Fedő szabálybázis: azaz bármely bemenő adat esetén léteznie kell legalább egy olyan szabálynak amelynek antecedense ε>0 mértékben fedi a megfigyelést a bemeneti tér minden dimenziójában bármely megfigyelésre kiértékelhető következtetést eredményez

43 Fuzzy logika - röviden Ritka szabálybázis: van olyan megfigyelés amelyre nincs következtetés ekkor valamely fuzzy szabály-interpolációs módszer segítség ével határozzák meg a következményt.
44 FRIQ-learning Az előzőleg bemutatott Q-learning módszer diszkrét állapot-akció térre alkalmazható fuzzy modell bevezetésével azonban kiterjeszthető folytonos állapot- és akciótérre A fuzzy szabály interpoláció alapú Q-tanulás (FRIQ-learning) az FQ-learning (fuzzy Q-learning) kiegészítése ritka szabálybázisok alkalmazhatósága
45 FRIQ-learning A diszkrét Q-learning fuzzy modell alkalmazásával kiterjeszthető folytonos állapot-akció térre Fuzzy Q-learning (FQ-learning) E.g. 0-order Takagi-Sugeno Fuzzy Inference model Probléma: a szabályszám exponenciálisan nő az állapot dimenzió (antecedens) számával Lehetséges megoldás: Fuzzy Rule Interpolation (FRI) FQ-learning + FRI FIVE: FRIQ-learning
46 FRIQ-learning példák Nézzünk működő alkalmazásokat : ) Maze Pong
47 FRIQ-learning példák - Maze 2 állapot leíró x pozíció: 0-8 y pozíció: akció: elmozdulás (fel, le, jobbra, balra)
 ütő pozíciója 1 akció: elmozdulás (fel, le,")
48 FRIQ-learning példák - Pong 4 állapot leíró labda x pozíció labda y pozíció labda iránya (6 eset) ütő pozíciója 1 akció: elmozdulás (fel, le, semerre)
49 FRIQ-learning példák Matlab bemutató : )
50 Felhasznált irodalom Richard S. Sutton and Andrew G. Barto Reinforcement Learning: An Introduction Peter Norvig, Stuart J. Russel Mesterséges intelligencia Modern megközelítésben László T. Kóczy, Domonkos Tikk - Fuzzy rendszerek 50
51 Köszönöm a figyelmet!
Megerősítéses tanulási módszerek és alkalmazásaik
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Megerősítéses tanulási módszerek és alkalmazásaik Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, 2017. szeptember 15. Tartalom
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Megerősítéses tanulási módszerek és alkalmazásaik Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, 2017. szeptember 15. Tartalom
Megerősítéses tanulás 2. előadás
 Megerősítéses tanulás 2. előadás 1 Technikai dolgok Email szityu@eotvoscollegium.hu Annai levlista http://nipglab04.inf.elte.hu/cgi-bin/mailman/listinfo/annai/ Olvasnivaló: Sutton, Barto: Reinforcement
Megerősítéses tanulás 2. előadás 1 Technikai dolgok Email szityu@eotvoscollegium.hu Annai levlista http://nipglab04.inf.elte.hu/cgi-bin/mailman/listinfo/annai/ Olvasnivaló: Sutton, Barto: Reinforcement
Algoritmusok Tervezése. Fuzzy rendszerek Dr. Bécsi Tamás
 Algoritmusok Tervezése Fuzzy rendszerek Dr. Bécsi Tamás Bevezetés Mese a homokkupacról és a hidegről és a hegyekről Bevezetés, Fuzzy történet Két értékű logika, Boole algebra Háromértékű logika n értékű
Algoritmusok Tervezése Fuzzy rendszerek Dr. Bécsi Tamás Bevezetés Mese a homokkupacról és a hidegről és a hegyekről Bevezetés, Fuzzy történet Két értékű logika, Boole algebra Háromértékű logika n értékű
Stratégiák tanulása az agyban
 Statisztikai tanulás az idegrendszerben, 2019. Stratégiák tanulása az agyban Bányai Mihály banyai.mihaly@wigner.mta.hu http://golab.wigner.mta.hu/people/mihaly-banyai/ Kortárs MI thispersondoesnotexist.com
Statisztikai tanulás az idegrendszerben, 2019. Stratégiák tanulása az agyban Bányai Mihály banyai.mihaly@wigner.mta.hu http://golab.wigner.mta.hu/people/mihaly-banyai/ Kortárs MI thispersondoesnotexist.com
Megerősítéses tanulás
 Megerősítéses tanulás elméleti kognitív neurális Introduction Knowledge representation Probabilistic models Bayesian behaviour Approximate inference I (computer lab) Vision I Approximate inference II:
Megerősítéses tanulás elméleti kognitív neurális Introduction Knowledge representation Probabilistic models Bayesian behaviour Approximate inference I (computer lab) Vision I Approximate inference II:
Programozási módszertan. A gépi tanulás alapmódszerei
 SZDT-12 p. 1/24 Programozási módszertan A gépi tanulás alapmódszerei Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu SZDT-12 p. 2/24 Ágensek Az új
SZDT-12 p. 1/24 Programozási módszertan A gépi tanulás alapmódszerei Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu SZDT-12 p. 2/24 Ágensek Az új
FELÜGYELT ÉS MEGERŐSÍTÉSES TANULÓ RENDSZEREK FEJLESZTÉSE
 FELÜGYELT ÉS MEGERŐSÍTÉSES TANULÓ RENDSZEREK FEJLESZTÉSE Dr. Aradi Szilárd, Fehér Árpád Mesterséges intelligencia kialakulása 1956 Dartmouth-i konferencián egy maroknyi tudós megalapította a MI területét
FELÜGYELT ÉS MEGERŐSÍTÉSES TANULÓ RENDSZEREK FEJLESZTÉSE Dr. Aradi Szilárd, Fehér Árpád Mesterséges intelligencia kialakulása 1956 Dartmouth-i konferencián egy maroknyi tudós megalapította a MI területét
Intelligens irányítások
 Intelligens irányítások Fuzzy következtető rendszerek Ballagi Áron Széchenyi István Egyetem Automatizálási Tsz. 1 Fuzzy következtető rendszer Fuzzy következtető Szabálybázis Fuzzifikáló Defuzzifikáló 2
Intelligens irányítások Fuzzy következtető rendszerek Ballagi Áron Széchenyi István Egyetem Automatizálási Tsz. 1 Fuzzy következtető rendszer Fuzzy következtető Szabálybázis Fuzzifikáló Defuzzifikáló 2
Megerősítéses tanulás 7. előadás
 Megerősítéses tanulás 7. előadás 1 Ismétlés: TD becslés s t -ben stratégia szerint lépek! a t, r t, s t+1 TD becslés: tulajdonképpen ezt mintavételezzük: 2 Akcióértékelő függvény számolása TD-vel még mindig
Megerősítéses tanulás 7. előadás 1 Ismétlés: TD becslés s t -ben stratégia szerint lépek! a t, r t, s t+1 TD becslés: tulajdonképpen ezt mintavételezzük: 2 Akcióértékelő függvény számolása TD-vel még mindig
Dunaújvárosi Főiskola Informatikai Intézet. Intelligens ágensek. Dr. Seebauer Márta. főiskolai tanár
 Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Dunaújvárosi Főiskola Informatikai Intézet Intelligens ágensek Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Ágens Ágens (agent) bármi lehet, amit úgy tekinthetünk, hogy érzékelők (sensors)
Adaptív menetrendezés ADP algoritmus alkalmazásával
 Adaptív menetrendezés ADP algoritmus alkalmazásával Alcím III. Mechwart András Ifjúsági Találkozó Mátraháza, 2013. szeptember 10. Divényi Dániel Villamos Energetika Tanszék Villamos Művek és Környezet
Adaptív menetrendezés ADP algoritmus alkalmazásával Alcím III. Mechwart András Ifjúsági Találkozó Mátraháza, 2013. szeptember 10. Divényi Dániel Villamos Energetika Tanszék Villamos Művek és Környezet
Számítási intelligencia
 Botzheim János Számítási intelligencia Budapesti Műszaki és Gazdaságtudományi Egyetem, Mechatronika, Optika és Gépészeti Informatika Tanszék Graduate School of System Design, Tokyo Metropolitan University
Botzheim János Számítási intelligencia Budapesti Műszaki és Gazdaságtudományi Egyetem, Mechatronika, Optika és Gépészeti Informatika Tanszék Graduate School of System Design, Tokyo Metropolitan University
Megerősítéses tanulás
 Gépi tanulás (Szekvenciális döntési probléma) Megerősítéses tanulás Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Az egész világot nem tudjuk modellezni,
Gépi tanulás (Szekvenciális döntési probléma) Megerősítéses tanulás Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Az egész világot nem tudjuk modellezni,
Intelligens ágensek. Mesterséges intelligencia február 28.
 Intelligens ágensek Mesterséges intelligencia 2014. február 28. Ágens = cselekvő Bevezetés Érzékelői segítségével érzékeli a környezetet Beavatkozói/akciói segítségével megváltoztatja azt Érzékelési sorozat:
Intelligens ágensek Mesterséges intelligencia 2014. február 28. Ágens = cselekvő Bevezetés Érzékelői segítségével érzékeli a környezetet Beavatkozói/akciói segítségével megváltoztatja azt Érzékelési sorozat:
TARTALOMJEGYZÉK. TARTALOMJEGYZÉK...vii ELŐSZÓ... xiii BEVEZETÉS A lágy számításról A könyv célkitűzése és felépítése...
 TARTALOMJEGYZÉK TARTALOMJEGYZÉK...vii ELŐSZÓ... xiii BEVEZETÉS...1 1. A lágy számításról...2 2. A könyv célkitűzése és felépítése...6 AZ ÖSSZETEVŐ LÁGY RENDSZEREK...9 I. BEVEZETÉS...10 3. Az összetevő
TARTALOMJEGYZÉK TARTALOMJEGYZÉK...vii ELŐSZÓ... xiii BEVEZETÉS...1 1. A lágy számításról...2 2. A könyv célkitűzése és felépítése...6 AZ ÖSSZETEVŐ LÁGY RENDSZEREK...9 I. BEVEZETÉS...10 3. Az összetevő
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Megerősítéses tanulás Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Ágens tudása: Induláskor: vagy ismeri már a környezetet
Mesterséges Intelligencia MI Megerősítéses tanulás Pataki Béla BME I.E. 414, 463-26-79 pataki@mit.bme.hu, http://www.mit.bme.hu/general/staff/pataki Ágens tudása: Induláskor: vagy ismeri már a környezetet
Dr. Vincze Dávid, Miskolci Egyetem, Informatikai Intézet: Szabálybázis redukció az FRIQ-tanulási módszerben
 Kutatási jelentés Dr. Vincze Dávid, Miskolci Egyetem, Informatikai Intézet: Szabálybázis redukció az FRIQ-tanulási módszerben A már korábbi kutatások során kifejlesztett és bemutatott fuzzy szabály interpoláció
Kutatási jelentés Dr. Vincze Dávid, Miskolci Egyetem, Informatikai Intézet: Szabálybázis redukció az FRIQ-tanulási módszerben A már korábbi kutatások során kifejlesztett és bemutatott fuzzy szabály interpoláció
Algoritmusok Tervezése. 6. Előadás Algoritmusok 101 Dr. Bécsi Tamás
 Algoritmusok Tervezése 6. Előadás Algoritmusok 101 Dr. Bécsi Tamás Mi az algoritmus? Lépések sorozata egy feladat elvégzéséhez (legáltalánosabban) Informálisan algoritmusnak nevezünk bármilyen jól definiált
Algoritmusok Tervezése 6. Előadás Algoritmusok 101 Dr. Bécsi Tamás Mi az algoritmus? Lépések sorozata egy feladat elvégzéséhez (legáltalánosabban) Informálisan algoritmusnak nevezünk bármilyen jól definiált
Fuzzy halmazok jellemzői
 A Fuzzy rendszerek, számítási intelligencia gyakorló feladatok megoldása Fuzzy halmazok jellemzői A fuzzy halmaz tartója az alaphalmaz azon elemeket tartalmazó részhalmaza, melyek tagsági értéke 0-nál
A Fuzzy rendszerek, számítási intelligencia gyakorló feladatok megoldása Fuzzy halmazok jellemzői A fuzzy halmaz tartója az alaphalmaz azon elemeket tartalmazó részhalmaza, melyek tagsági értéke 0-nál
DOKTORANDUSZ FÓRUM, 1999 Miskolc, 1999. november. Megerősítő tanulási módszerek alkalmazása az informatikában
 DOKTORANDUSZ FÓRUM, 1999 Miskolc, 1999. november Megerősítő tanulási módszerek alkalmazása az informatikában STEFÁN PÉTER Miskolci Egyetem, Alkalmazott Informatikai Tanszék 3515 Miskolc-Egyetemváros 1.
DOKTORANDUSZ FÓRUM, 1999 Miskolc, 1999. november Megerősítő tanulási módszerek alkalmazása az informatikában STEFÁN PÉTER Miskolci Egyetem, Alkalmazott Informatikai Tanszék 3515 Miskolc-Egyetemváros 1.
Tanulás az idegrendszerben. Structure Dynamics Implementation Algorithm Computation - Function
 Tanulás az idegrendszerben Structure Dynamics Implementation Algorithm Computation - Function Tanulás pszichológiai szinten Classical conditioning Hebb ötlete: "Ha az A sejt axonja elég közel van a B sejthez,
Tanulás az idegrendszerben Structure Dynamics Implementation Algorithm Computation - Function Tanulás pszichológiai szinten Classical conditioning Hebb ötlete: "Ha az A sejt axonja elég közel van a B sejthez,
BIZONYTALAN ADATOK KEZELÉSE: FUZZY SZAKÉRTŐI RENDSZEREK
 BIZONYTALAN ADATOK KEZELÉSE: FUZZY SZAKÉRTŐI RENDSZEREK Szakértői rendszerek, 14. hét, 2008 Tartalom 1 Bevezető 2 Fuzzy történelem A fuzzy logika kialakulása Alkalmazások Fuzzy logikát követ-e a világ?
BIZONYTALAN ADATOK KEZELÉSE: FUZZY SZAKÉRTŐI RENDSZEREK Szakértői rendszerek, 14. hét, 2008 Tartalom 1 Bevezető 2 Fuzzy történelem A fuzzy logika kialakulása Alkalmazások Fuzzy logikát követ-e a világ?
6. Fuzzy irányítási rendszerek
 6. Fuzzy irányítási rendszerek Gépi intelligencia I. Fodor János BMF NIK IMRI NIMGI1MIEM Tartalomjegyzék I 1 Bevezetés 2 Fuzzy irányítási rendszerek felépítése A szabálybázis Az illeszkedés mértékét meghatározó
6. Fuzzy irányítási rendszerek Gépi intelligencia I. Fodor János BMF NIK IMRI NIMGI1MIEM Tartalomjegyzék I 1 Bevezetés 2 Fuzzy irányítási rendszerek felépítése A szabálybázis Az illeszkedés mértékét meghatározó
Számítógépes képelemzés 7. előadás. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
Számítógépes képelemzés 7. előadás Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Momentumok Momentum-alapú jellemzők Tömegközéppont Irányultáság 1 2 tan 2 1 2,0 1,1 0, 2 Befoglaló
FUZZY KÖVETKEZTETÉS SŰRŰ ÉS RITKA SZABÁLYBÁZISOK ESETÉN. Johanyák Zsolt Csaba 1 Kovács Szilveszter 2
 Johanyák Zs. Cs., Kovács Sz.: Fuzzy következtetés sűrű és ritka szabálybázisok esetén, Magyar Tudomány Ünnepe, Bács-Kiskun Megyei Tudományos Fórum, Kecskemét, 2005. november.10, ISSN: 1586-846x, pp. 201-206.
Johanyák Zs. Cs., Kovács Sz.: Fuzzy következtetés sűrű és ritka szabálybázisok esetén, Magyar Tudomány Ünnepe, Bács-Kiskun Megyei Tudományos Fórum, Kecskemét, 2005. november.10, ISSN: 1586-846x, pp. 201-206.
1. gyakorlat. Mesterséges Intelligencia 2.
 1. gyakorlat Mesterséges Intelligencia. Elérhetőségek web: www.inf.u-szeged.hu/~gulyasg mail: gulyasg@inf.u-szeged.hu Követelmények (nem teljes) gyakorlat látogatása kötelező ZH írása a gyakorlaton elhangzott
1. gyakorlat Mesterséges Intelligencia. Elérhetőségek web: www.inf.u-szeged.hu/~gulyasg mail: gulyasg@inf.u-szeged.hu Követelmények (nem teljes) gyakorlat látogatása kötelező ZH írása a gyakorlaton elhangzott
Gépi tanulás a gyakorlatban. Lineáris regresszió
 Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Gépi tanulás a gyakorlatban Lineáris regresszió Lineáris Regresszió Legyen adott egy tanuló adatbázis: Rendelkezésünkre áll egy olyan előfeldolgozott adathalmaz, aminek sorai az egyes ingatlanokat írják
Optimalizálás alapfeladata Legmeredekebb lejtő Lagrange függvény Log-barrier módszer Büntetőfüggvény módszer 2017/
 Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Operációkutatás I. 2017/2018-2. Szegedi Tudományegyetem Informatikai Intézet Számítógépes Optimalizálás Tanszék 9. Előadás Az optimalizálás alapfeladata Keressük f függvény maximumát ahol f : R n R és
Számítógépes döntéstámogatás. Döntések fuzzy környezetben Közelítő következtetések
 BLSZM-09 p. 1/17 Számítógépes döntéstámogatás Döntések fuzzy környezetben Közelítő következtetések Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu
BLSZM-09 p. 1/17 Számítógépes döntéstámogatás Döntések fuzzy környezetben Közelítő következtetések Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu
Megerősítéses tanulás 9. előadás
 Megerősítéses tanulás 9. előadás 1 Backgammon (vagy Ostábla) 2 3 TD-Gammon 0.0 TD() tanulás (azaz időbeli differencia-módszer felelősségnyomokkal) függvényapproximátor: neuronháló 40 rejtett (belső) neuron
Megerősítéses tanulás 9. előadás 1 Backgammon (vagy Ostábla) 2 3 TD-Gammon 0.0 TD() tanulás (azaz időbeli differencia-módszer felelősségnyomokkal) függvényapproximátor: neuronháló 40 rejtett (belső) neuron
Neurális hálózatok bemutató
 Neurális hálózatok bemutató Füvesi Viktor Miskolci Egyetem Alkalmazott Földtudományi Kutatóintézet Miért? Vannak feladatok amelyeket az agy gyorsabban hajt végre mint a konvencionális számítógépek. Pl.:
Neurális hálózatok bemutató Füvesi Viktor Miskolci Egyetem Alkalmazott Földtudományi Kutatóintézet Miért? Vannak feladatok amelyeket az agy gyorsabban hajt végre mint a konvencionális számítógépek. Pl.:
Mit látnak a robotok? Bányai Mihály Matemorfózis, 2017.
 Mit látnak a robotok? Bányai Mihály Matemorfózis, 2017. Vizuális feldolgozórendszerek feladatai Mesterséges intelligencia és idegtudomány Mesterséges intelligencia és idegtudomány Párhuzamos problémák
Mit látnak a robotok? Bányai Mihály Matemorfózis, 2017. Vizuális feldolgozórendszerek feladatai Mesterséges intelligencia és idegtudomány Mesterséges intelligencia és idegtudomány Párhuzamos problémák
Gépi tanulás és Mintafelismerés
 Gépi tanulás és Mintafelismerés jegyzet Csató Lehel Matematika-Informatika Tanszék BabesBolyai Tudományegyetem, Kolozsvár 2007 Aug. 20 2 1. fejezet Bevezet A mesterséges intelligencia azon módszereit,
Gépi tanulás és Mintafelismerés jegyzet Csató Lehel Matematika-Informatika Tanszék BabesBolyai Tudományegyetem, Kolozsvár 2007 Aug. 20 2 1. fejezet Bevezet A mesterséges intelligencia azon módszereit,
Fourier transzformáció
 a Matematika mérnököknek II. című tárgyhoz Fourier transzformáció Fourier transzformáció, heurisztika Tekintsük egy 2L szerint periodikus függvény Fourier sorát: f (x) = a 0 2 + ( ( nπ ) ( nπ )) a n cos
a Matematika mérnököknek II. című tárgyhoz Fourier transzformáció Fourier transzformáció, heurisztika Tekintsük egy 2L szerint periodikus függvény Fourier sorát: f (x) = a 0 2 + ( ( nπ ) ( nπ )) a n cos
Keresés képi jellemzők alapján. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
Logikai ágensek. Mesterséges intelligencia március 21.
 Logikai ágensek Mesterséges intelligencia 2014. március 21. Bevezetés Eddigi példák tudásra: állapotok halmaza, lehetséges operátorok, ezek költségei, heurisztikák Feltételezés: a világ (lehetséges állapotok
Logikai ágensek Mesterséges intelligencia 2014. március 21. Bevezetés Eddigi példák tudásra: állapotok halmaza, lehetséges operátorok, ezek költségei, heurisztikák Feltételezés: a világ (lehetséges állapotok
Gépi tanulás a gyakorlatban. Bevezetés
 Gépi tanulás a gyakorlatban Bevezetés Motiváció Nagyon gyakran találkozunk gépi tanuló alkalmazásokkal Spam detekció Karakter felismerés Fotó címkézés Szociális háló elemzés Piaci szegmentáció analízis
Gépi tanulás a gyakorlatban Bevezetés Motiváció Nagyon gyakran találkozunk gépi tanuló alkalmazásokkal Spam detekció Karakter felismerés Fotó címkézés Szociális háló elemzés Piaci szegmentáció analízis
DIFFERENCIAEGYENLETEK
 DIFFERENCIAEGYENLETEK Példa: elsőrendű állandó e.h. lineáris differenciaegyenlet Ennek megoldása: Kezdeti feltétellel: Kezdeti feltétel nélkül ha 1 és a végtelen összeg (abszolút) konvergens: / 1 Minden
DIFFERENCIAEGYENLETEK Példa: elsőrendű állandó e.h. lineáris differenciaegyenlet Ennek megoldása: Kezdeti feltétellel: Kezdeti feltétel nélkül ha 1 és a végtelen összeg (abszolút) konvergens: / 1 Minden
Intelligens irányítások
 Intelligens irányítások Fuzzy halmazok Ballagi Áron Széchenyi István Egyetem Automatizálási Tsz. Arisztotelészi szi logika 2 Taichi Yin-Yang Yang logika 3 Hagyományos és Fuzzy halmaz Egy hagyományos halmaz
Intelligens irányítások Fuzzy halmazok Ballagi Áron Széchenyi István Egyetem Automatizálási Tsz. Arisztotelészi szi logika 2 Taichi Yin-Yang Yang logika 3 Hagyományos és Fuzzy halmaz Egy hagyományos halmaz
12. előadás - Markov-láncok I.
 12. előadás - Markov-láncok I. 2016. november 21. 12. előadás 1 / 15 Markov-lánc - definíció Az X n, n N valószínűségi változók sorozatát diszkrét idejű sztochasztikus folyamatnak nevezzük. Legyen S R
12. előadás - Markov-láncok I. 2016. november 21. 12. előadás 1 / 15 Markov-lánc - definíció Az X n, n N valószínűségi változók sorozatát diszkrét idejű sztochasztikus folyamatnak nevezzük. Legyen S R
KÖZELÍTŐ INFERENCIA II.
 STATISZTIKAI TANULÁS AZ IDEGRENDSZERBEN KÖZELÍTŐ INFERENCIA II. MONTE CARLO MÓDSZEREK ISMÉTLÉS Egy valószínűségi modellben a következtetéseinket a látensek vagy a paraméterek fölötti poszterior írja le.
STATISZTIKAI TANULÁS AZ IDEGRENDSZERBEN KÖZELÍTŐ INFERENCIA II. MONTE CARLO MÓDSZEREK ISMÉTLÉS Egy valószínűségi modellben a következtetéseinket a látensek vagy a paraméterek fölötti poszterior írja le.
KÖZELÍTŐ INFERENCIA II.
 STATISZTIKAI TANULÁS AZ IDEGRENDSZERBEN KÖZELÍTŐ INFERENCIA II. MONTE CARLO MÓDSZEREK ISMÉTLÉS Egy valószínűségi modellben a következtetéseinket a látensek vagy a paraméterek fölötti poszterior írja le.
STATISZTIKAI TANULÁS AZ IDEGRENDSZERBEN KÖZELÍTŐ INFERENCIA II. MONTE CARLO MÓDSZEREK ISMÉTLÉS Egy valószínűségi modellben a következtetéseinket a látensek vagy a paraméterek fölötti poszterior írja le.
Problémamegoldás kereséssel. Mesterséges intelligencia március 7.
 Problémamegoldás kereséssel Mesterséges intelligencia 2014. március 7. Bevezetés Problémamegoldó ágens Kívánt állapotba vezető cselekvéseket keres Probléma megfogalmazása Megoldás megfogalmazása Keresési
Problémamegoldás kereséssel Mesterséges intelligencia 2014. március 7. Bevezetés Problémamegoldó ágens Kívánt állapotba vezető cselekvéseket keres Probléma megfogalmazása Megoldás megfogalmazása Keresési
FUZZY RENDSZER GENERÁLÁSA SZABÁLYBÁZIS BŐVÍTÉSSEL FUZZY SYSTEM GENERATION BY RULE BASE EXTENSION
 FUZZY RENDSZER GENERÁLÁSA SZABÁLYBÁZIS BŐVÍTÉSSEL FUZZY SYSTEM GENERATION BY RULE BASE EXTENSION Johanyák Zsolt Csaba, Kovács Szilveszter 2 Kecskeméti Főiskola, GAMF Kar, Kalmár Sándor Informatikai Intézet,
FUZZY RENDSZER GENERÁLÁSA SZABÁLYBÁZIS BŐVÍTÉSSEL FUZZY SYSTEM GENERATION BY RULE BASE EXTENSION Johanyák Zsolt Csaba, Kovács Szilveszter 2 Kecskeméti Főiskola, GAMF Kar, Kalmár Sándor Informatikai Intézet,
Ambiens szabályozás problémája Kontroll és tanulás-1
 Ambiens szabályozás problémája Kontroll és tanulás-1 Ambiens (fizikai) tér Ambiens Intelligencia szenzorok beavatkozók Ágens szervezet AmI - megfigyelés, elemzés - tervezés, megtanulás AmI - statikus -
Ambiens szabályozás problémája Kontroll és tanulás-1 Ambiens (fizikai) tér Ambiens Intelligencia szenzorok beavatkozók Ágens szervezet AmI - megfigyelés, elemzés - tervezés, megtanulás AmI - statikus -
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI
 FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
FEGYVERNEKI SÁNDOR, Valószínűség-sZÁMÍTÁs És MATEMATIKAI statisztika 10 X. SZIMULÁCIÓ 1. VÉLETLEN számok A véletlen számok fontos szerepet játszanak a véletlen helyzetek generálásában (pénzérme, dobókocka,
Új típusú döntési fa építés és annak alkalmazása többtényezős döntés területén
 Új típusú döntési fa építés és annak alkalmazása többtényezős döntés területén Dombi József Szegedi Tudományegyetem Bevezetés - ID3 (Iterative Dichotomiser 3) Az ID algoritmusok egy elemhalmaz felhasználásával
Új típusú döntési fa építés és annak alkalmazása többtényezős döntés területén Dombi József Szegedi Tudományegyetem Bevezetés - ID3 (Iterative Dichotomiser 3) Az ID algoritmusok egy elemhalmaz felhasználásával
Navigáci. stervezés. Algoritmusok és alkalmazásaik. Osváth Róbert Sorbán Sámuel
 Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Navigáci ció és s mozgástervez stervezés Algoritmusok és alkalmazásaik Osváth Róbert Sorbán Sámuel Feladat Adottak: pálya (C), játékos, játékos ismerethalmaza, kezdőpont, célpont. Pálya szerkezete: akadályokkal
Gépi tanulás Gregorics Tibor Mesterséges intelligencia
 Gépi tanulás Tanulás fogalma Egy algoritmus akkor tanul, ha egy feladat megoldása során olyan változások következnek be a működésében, hogy később ugyanazt a feladatot vagy ahhoz hasonló más feladatokat
Gépi tanulás Tanulás fogalma Egy algoritmus akkor tanul, ha egy feladat megoldása során olyan változások következnek be a működésében, hogy később ugyanazt a feladatot vagy ahhoz hasonló más feladatokat
Diszkrét matematika 2.C szakirány
 Diszkrét matematika 2.C szakirány 2017. tavasz 1. Diszkrét matematika 2.C szakirány 3. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2017.
Diszkrét matematika 2.C szakirány 2017. tavasz 1. Diszkrét matematika 2.C szakirány 3. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2017.
x, x R, x rögzített esetén esemény. : ( ) x Valószínűségi Változó: Feltételes valószínűség: Teljes valószínűség Tétele: Bayes Tétel:
 x Valószínűségi Változó: Feltételes valószínűség: Teljes valószínűség Tétele: Bayes Tétel:") Feltételes valószínűség: Teljes valószínűség Tétele: Bayes Tétel: Valószínűségi változó általános fogalma: A : R leképezést valószínűségi változónak nevezzük, ha : ( ) x, x R, x rögzített esetén esemény.
Feltételes valószínűség: Teljes valószínűség Tétele: Bayes Tétel: Valószínűségi változó általános fogalma: A : R leképezést valószínűségi változónak nevezzük, ha : ( ) x, x R, x rögzített esetén esemény.
Számításelmélet. Második előadás
 Számításelmélet Második előadás Többszalagos Turing-gép Turing-gép k (konstans) számú szalaggal A szalagok mindegyike rendelkezik egy független író / olvasó fejjel A bemenet az első szalagra kerül, a többi
Számításelmélet Második előadás Többszalagos Turing-gép Turing-gép k (konstans) számú szalaggal A szalagok mindegyike rendelkezik egy független író / olvasó fejjel A bemenet az első szalagra kerül, a többi
Név KP Blokk neve KP. Logisztika I. 6 LOG 12 Dr. Kovács Zoltán Logisztika II. 6 Logisztika Dr. Kovács Zoltán
 Név KP Blokk neve KP Felelıs vizsgáztató Kombinatorikus módszerek és algoritmusok 5 MAT 10 Dr. Tuza Zsolt Diszkrét és folytonos dinamikai rendszerek matematikai alapjai 5 Matematika Dr. Hartung Ferenc
Név KP Blokk neve KP Felelıs vizsgáztató Kombinatorikus módszerek és algoritmusok 5 MAT 10 Dr. Tuza Zsolt Diszkrét és folytonos dinamikai rendszerek matematikai alapjai 5 Matematika Dr. Hartung Ferenc
Mesterséges Intelligencia MI
 Mesterséges Intelligencia MI Keresés ellenséges környezetben Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Ellenség
Mesterséges Intelligencia MI Keresés ellenséges környezetben Dobrowiecki Tadeusz Eredics Péter, és mások BME I.E. 437, 463-28-99 dobrowiecki@mit.bme.hu, http://www.mit.bme.hu/general/staff/tade Ellenség
Komponensek keresése a megerősítéses tanulásban
 Eötvös Loránd Tudományegyetem Informatikai Kar Komponensek keresése a megerősítéses tanulásban Doktori értekezés Takács Bálint témavezető: Dr. habil. Lőrincz András tudományos főmunkatárs ELTE Információs
Eötvös Loránd Tudományegyetem Informatikai Kar Komponensek keresése a megerősítéses tanulásban Doktori értekezés Takács Bálint témavezető: Dr. habil. Lőrincz András tudományos főmunkatárs ELTE Információs
Diszkrét matematika 2. estis képzés
 Diszkrét matematika 2. estis képzés 2018. tavasz 1. Diszkrét matematika 2. estis képzés 10. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Diszkrét matematika 2. estis képzés 2018. tavasz 1. Diszkrét matematika 2. estis képzés 10. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék
Markov-láncok stacionárius eloszlása
 Markov-láncok stacionárius eloszlása Adatbányászat és Keresés Csoport, MTA SZTAKI dms.sztaki.hu Kiss Tamás 2013. április 11. Tartalom Markov láncok definíciója, jellemzése Visszatérési idők Stacionárius
Markov-láncok stacionárius eloszlása Adatbányászat és Keresés Csoport, MTA SZTAKI dms.sztaki.hu Kiss Tamás 2013. április 11. Tartalom Markov láncok definíciója, jellemzése Visszatérési idők Stacionárius
XII. LABOR - Fuzzy logika
 XII. LABOR - Fuzzy logika XII. LABOR - Fuzzy logika A gyakorlat célja elsajátítani a fuzzy logikával kapcsolatos elemeket: fuzzy tagsági függvények, fuzzy halmazmveletek, fuzzy következtet rendszerek felépítése,
XII. LABOR - Fuzzy logika XII. LABOR - Fuzzy logika A gyakorlat célja elsajátítani a fuzzy logikával kapcsolatos elemeket: fuzzy tagsági függvények, fuzzy halmazmveletek, fuzzy következtet rendszerek felépítése,
Numerikus matematika
 Numerikus matematika Baran Ágnes Gyakorlat Nemlineáris egyenletek Baran Ágnes Numerikus matematika 9.10. Gyakorlat 1 / 14 Feladatok (1) Mutassa meg, hogy az 3x 3 12x + 4 = 0 egyenletnek van gyöke a [0,
Numerikus matematika Baran Ágnes Gyakorlat Nemlineáris egyenletek Baran Ágnes Numerikus matematika 9.10. Gyakorlat 1 / 14 Feladatok (1) Mutassa meg, hogy az 3x 3 12x + 4 = 0 egyenletnek van gyöke a [0,
GDF Fuzzy Robot Műhely
 GDF Fuzzy Robot Műhely Kovács János, Vári Kakas István 2, Gábor Dénes Főiskola,2 Alap- és Műszaki Tudományi Intézet, Budapest, Hungary 2. nov. 8. GDF-FRM Kezdeti lépések: A Gábor Dénes Főiskolán (GDF)
GDF Fuzzy Robot Műhely Kovács János, Vári Kakas István 2, Gábor Dénes Főiskola,2 Alap- és Műszaki Tudományi Intézet, Budapest, Hungary 2. nov. 8. GDF-FRM Kezdeti lépések: A Gábor Dénes Főiskolán (GDF)
Bevezetés az informatikába
 Bevezetés az informatikába 6. előadás Dr. Istenes Zoltán Eötvös Loránd Tudományegyetem Informatikai Kar Programozáselmélet és Szoftvertechnológiai Tanszék Matematikus BSc - I. félév / 2008 / Budapest Dr.
Bevezetés az informatikába 6. előadás Dr. Istenes Zoltán Eötvös Loránd Tudományegyetem Informatikai Kar Programozáselmélet és Szoftvertechnológiai Tanszék Matematikus BSc - I. félév / 2008 / Budapest Dr.
Diszkrét matematika 2.C szakirány
 Diszkrét matematika 2.C szakirány 2015. ősz 1. Diszkrét matematika 2.C szakirány 3. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2015.
Diszkrét matematika 2.C szakirány 2015. ősz 1. Diszkrét matematika 2.C szakirány 3. előadás Nagy Gábor nagygabr@gmail.com nagy@compalg.inf.elte.hu compalg.inf.elte.hu/ nagy Komputeralgebra Tanszék 2015.
4. Lokalizáció Magyar Attila
 4. Lokalizáció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 23. 4. Lokalizáció 2 4. Tartalom
4. Lokalizáció Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék magyar.attila@virt.uni-pannon.hu 2011. szeptember 23. 4. Lokalizáció 2 4. Tartalom
A Föld középpontja felé szabadon eső test sebessége növekszik, azaz, a
 a Matematika mérnököknek I. című tárgyhoz Függvények. Függvények A Föld középpontja felé szabadon eső test sebessége növekszik, azaz, a szabadon eső test sebessége az idő függvénye. Konstans hőmérsékleten
a Matematika mérnököknek I. című tárgyhoz Függvények. Függvények A Föld középpontja felé szabadon eső test sebessége növekszik, azaz, a szabadon eső test sebessége az idő függvénye. Konstans hőmérsékleten
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Korszerű információs technológiák Klaszteranalízis Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, 2018. október 20. Tartalom
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Korszerű információs technológiák Klaszteranalízis Tompa Tamás tanársegéd Általános Informatikai Intézeti Tanszék Miskolc, 2018. október 20. Tartalom
Tanulás az idegrendszerben. Structure Dynamics Implementation Algorithm Computation - Function
 Tanulás az idegrendszerben Structure Dynamics Implementation Algorithm Computation - Function Tanulás pszichológiai szinten Classical conditioning Hebb ötlete: "Ha az A sejt axonja elég közel van a B sejthez,
Tanulás az idegrendszerben Structure Dynamics Implementation Algorithm Computation - Function Tanulás pszichológiai szinten Classical conditioning Hebb ötlete: "Ha az A sejt axonja elég közel van a B sejthez,
Mérés és modellezés 1
 Mérés és modellezés 1 Mérés és modellezés A mérnöki tevékenység alapeleme a mérés. A mérés célja valamely jelenség megismerése, vizsgálata. A mérés tervszerűen végzett tevékenység: azaz rögzíteni kell
Mérés és modellezés 1 Mérés és modellezés A mérnöki tevékenység alapeleme a mérés. A mérés célja valamely jelenség megismerése, vizsgálata. A mérés tervszerűen végzett tevékenység: azaz rögzíteni kell
Bonyolult jelenség, aminek nincs jó modellje, sok empirikus adat, intelligens (ember)ágens képessége, hogy ilyen problémákkal mégis megbirkozzék.
ágens képessége, hogy ilyen problémákkal mégis megbirkozzék.") Vizsga, 2015. dec. 22. B cs. B1. Hogyan jellemezhetők a tanulást igénylő feladatok? (vendégelőadás) Bonyolult jelenség, aminek nincs jó modellje, sok empirikus adat, intelligens (ember)ágens képessége,
Vizsga, 2015. dec. 22. B cs. B1. Hogyan jellemezhetők a tanulást igénylő feladatok? (vendégelőadás) Bonyolult jelenség, aminek nincs jó modellje, sok empirikus adat, intelligens (ember)ágens képessége,
e (t µ) 2 f (t) = 1 F (t) = 1 Normális eloszlás negyedik centrális momentuma:
 2 f (t) = 1 F (t) = 1 Normális eloszlás negyedik centrális momentuma:") Normális eloszlás ξ valószínűségi változó normális eloszlású. ξ N ( µ, σ 2) Paraméterei: µ: várható érték, σ 2 : szórásnégyzet (µ tetszőleges, σ 2 tetszőleges pozitív valós szám) Normális eloszlás sűrűségfüggvénye:
Normális eloszlás ξ valószínűségi változó normális eloszlású. ξ N ( µ, σ 2) Paraméterei: µ: várható érték, σ 2 : szórásnégyzet (µ tetszőleges, σ 2 tetszőleges pozitív valós szám) Normális eloszlás sűrűségfüggvénye:
E.4 Markov-láncok E.4 Markov-láncok. Sok sorbanállási hálózat viselkedése leírható "folytonos idejű Markovláncok " segítségével.
 E.4 Markov-láncok Sok sorbanállási hálózat viselkedése leírható "folytonos idejű Markovláncok " segítségével. Egy Markov-láncot (MC) meghatároznak az alapját adó sorbanállási hálózat állapotai és az ezek
E.4 Markov-láncok Sok sorbanállási hálózat viselkedése leírható "folytonos idejű Markovláncok " segítségével. Egy Markov-láncot (MC) meghatároznak az alapját adó sorbanállási hálózat állapotai és az ezek
Irányításelmélet és technika II.
 Irányításelmélet és technika II. Legkisebb négyzetek módszere Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 200 november
Irányításelmélet és technika II. Legkisebb négyzetek módszere Magyar Attila Pannon Egyetem Műszaki Informatikai Kar Villamosmérnöki és Információs Rendszerek Tanszék amagyar@almos.vein.hu 200 november
Dr. Kalló Noémi. Termelés- és szolgáltatásmenedzsment. egyetemi adjunktus Menedzsment és Vállalatgazdaságtan Tanszék. Dr.
 Termelés- és szolgáltatásmenedzsment egyetemi adjunktus Menedzsment és Vállalatgazdaságtan Tanszék Termelés- és szolgáltatásmenedzsment 13. Ismertesse a legfontosabb előrejelzési módszereket és azok gyakorlati
Termelés- és szolgáltatásmenedzsment egyetemi adjunktus Menedzsment és Vállalatgazdaságtan Tanszék Termelés- és szolgáltatásmenedzsment 13. Ismertesse a legfontosabb előrejelzési módszereket és azok gyakorlati
GROVER-algoritmus. Sinkovicz Péter. ELTE, MSc II dec.15.
 ELTE, MSc II. 2011.dec.15. Áttekintés Feladat Algoritmus Kvantum keresési algoritmus áttekintése Input: N = 2 n elemű tömb, Ψ 1 = 0 1 kezdőállapot, f x0 (x) orákulum függvény. Output: x 0 keresett elem
ELTE, MSc II. 2011.dec.15. Áttekintés Feladat Algoritmus Kvantum keresési algoritmus áttekintése Input: N = 2 n elemű tömb, Ψ 1 = 0 1 kezdőállapot, f x0 (x) orákulum függvény. Output: x 0 keresett elem
Mérés és modellezés Méréstechnika VM, GM, MM 1
 Mérés és modellezés 2008.02.04. 1 Mérés és modellezés A mérnöki tevékenység alapeleme a mérés. A mérés célja valamely jelenség megismerése, vizsgálata. A mérés tervszerűen végzett tevékenység: azaz rögzíteni
Mérés és modellezés 2008.02.04. 1 Mérés és modellezés A mérnöki tevékenység alapeleme a mérés. A mérés célja valamely jelenség megismerése, vizsgálata. A mérés tervszerűen végzett tevékenység: azaz rögzíteni
Modellkiválasztás és struktúrák tanulása
 Modellkiválasztás és struktúrák tanulása Szervezőelvek keresése Az unsupervised learning egyik fő célja Optimális reprezentációk Magyarázatok Predikciók Az emberi tanulás alapja Általános strukturális
Modellkiválasztás és struktúrák tanulása Szervezőelvek keresése Az unsupervised learning egyik fő célja Optimális reprezentációk Magyarázatok Predikciók Az emberi tanulás alapja Általános strukturális
Bizonytalanság. Mesterséges intelligencia április 4.
 Bizonytalanság Mesterséges intelligencia 2014. április 4. Bevezetés Eddig: logika, igaz/hamis Ha nem teljes a tudás A világ nem figyelhető meg közvetlenül Részleges tudás nem reprezentálható logikai eszközökkel
Bizonytalanság Mesterséges intelligencia 2014. április 4. Bevezetés Eddig: logika, igaz/hamis Ha nem teljes a tudás A világ nem figyelhető meg közvetlenül Részleges tudás nem reprezentálható logikai eszközökkel
Regresszió. Csorba János. Nagyméretű adathalmazok kezelése március 31.
 Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Fuzzy elmélet a menedzsmentben
 Budapesti Műszaki és Gazdaságtudományi Egyetem Gazdaság- és Társadalomtudományi Kar Üzleti Tudományok Intézet Menedzsment és Vállalatgazdaságtan Tanszék Jónás Tamás Fuzzy elmélet a menedzsmentben Oktatási
Budapesti Műszaki és Gazdaságtudományi Egyetem Gazdaság- és Társadalomtudományi Kar Üzleti Tudományok Intézet Menedzsment és Vállalatgazdaságtan Tanszék Jónás Tamás Fuzzy elmélet a menedzsmentben Oktatási
Méréselmélet MI BSc 1
 Mérés és s modellezés 2008.02.15. 1 Méréselmélet - bevezetés a mérnöki problémamegoldás menete 1. A probléma kitűzése 2. A hipotézis felállítása 3. Kísérlettervezés 4. Megfigyelések elvégzése 5. Adatok
Mérés és s modellezés 2008.02.15. 1 Méréselmélet - bevezetés a mérnöki problémamegoldás menete 1. A probléma kitűzése 2. A hipotézis felállítása 3. Kísérlettervezés 4. Megfigyelések elvégzése 5. Adatok
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék
 Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék 2016/17 2. félév 8. Előadás Dr. Kulcsár Gyula egyetemi docens Kereső algoritmusok alkalmazása
Miskolci Egyetem Gépészmérnöki és Informatikai Kar Informatikai Intézet Alkalmazott Informatikai Intézeti Tanszék 2016/17 2. félév 8. Előadás Dr. Kulcsár Gyula egyetemi docens Kereső algoritmusok alkalmazása
Tanulás elosztott rendszerekben/3
 Tanulás elosztott rendszerekben/3 MARL Multi Agent Reinforcement Learning Többágenses megerősítéses tanulás Kezdjük egy ágenssel. Legyenek a környezeti állapotai s-ek, cselekvései a-k, az ágens cselekvéseit
Tanulás elosztott rendszerekben/3 MARL Multi Agent Reinforcement Learning Többágenses megerősítéses tanulás Kezdjük egy ágenssel. Legyenek a környezeti állapotai s-ek, cselekvései a-k, az ágens cselekvéseit
Valószínűségi modellellenőrzés Markov döntési folyamatokkal
 Valószínűségi modellellenőrzés Markov döntési folyamatokkal Hajdu Ákos Szoftver verifikáció és validáció 2015.12.09. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek
Valószínűségi modellellenőrzés Markov döntési folyamatokkal Hajdu Ákos Szoftver verifikáció és validáció 2015.12.09. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek
Jelek és rendszerek 1. 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék
 Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Forgalmi modellezés BMEKOKUM209
 BME Közlekedésüzemi és Közlekedésgazdasági Tanszék Forgalmi modellezés BMEKOKUM209 Szimulációs modellezés Dr. Juhász János A forgalmi modellezés célja A közlekedési igények bővülése és a motorizáció növekedése
BME Közlekedésüzemi és Közlekedésgazdasági Tanszék Forgalmi modellezés BMEKOKUM209 Szimulációs modellezés Dr. Juhász János A forgalmi modellezés célja A közlekedési igények bővülése és a motorizáció növekedése
Gyakorló feladatok. Agbeko Kwami Nutefe és Nagy Noémi
 Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
Gyakorló feladatok Agbeko Kwami Nutefe és Nagy Noémi 25 Tartalomjegyzék. Klasszikus hibaszámítás 3 2. Lineáris egyenletrendszerek 3 3. Interpoláció 4 4. Sajátérték, sajátvektor 6 5. Lineáris és nemlineáris
előadás Diszkrét idejű tömegkiszolgálási modellek Poisson-folyamat Folytonos idejű Markov-láncok Folytonos idejű sorbanállás
 13-14. előadás Diszkrét idejű tömegkiszolgálási modellek Poisson-folyamat Folytonos idejű Markov-láncok Folytonos idejű sorbanállás 2016. november 28. és december 5. 13-14. előadás 1 / 35 Bevezetés A diszkrét
13-14. előadás Diszkrét idejű tömegkiszolgálási modellek Poisson-folyamat Folytonos idejű Markov-láncok Folytonos idejű sorbanállás 2016. november 28. és december 5. 13-14. előadás 1 / 35 Bevezetés A diszkrét
További forgalomirányítási és szervezési játékok. 1. Nematomi forgalomirányítási játék
 További forgalomirányítási és szervezési játékok 1. Nematomi forgalomirányítási játék A forgalomirányítási játékban adott egy hálózat, ami egy irányított G = (V, E) gráf. A gráfban megengedjük, hogy két
További forgalomirányítási és szervezési játékok 1. Nematomi forgalomirányítási játék A forgalomirányítási játékban adott egy hálózat, ami egy irányított G = (V, E) gráf. A gráfban megengedjük, hogy két
JAVASLAT A TOP-K ELEMCSERÉK KERESÉSÉRE NAGY ONLINE KÖZÖSSÉGEKBEN
 JAVASLAT A TOP-K ELEMCSERÉK KERESÉSÉRE NAGY ONLINE KÖZÖSSÉGEKBEN Supporting Top-k item exchange recommendations in large online communities Barabás Gábor Nagy Dávid Nemes Tamás Probléma Cserekereskedelem
JAVASLAT A TOP-K ELEMCSERÉK KERESÉSÉRE NAGY ONLINE KÖZÖSSÉGEKBEN Supporting Top-k item exchange recommendations in large online communities Barabás Gábor Nagy Dávid Nemes Tamás Probléma Cserekereskedelem
Fuzzy szabály-interpolációs módszerek és mintaadatok alapján történő automatikus rendszergenerálás PHD ÉRTEKEZÉS TÉZISEI JOHANYÁK ZSOLT CSABA
 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Fuzzy szabály-interpolációs módszerek és mintaadatok alapján történő automatikus rendszergenerálás PHD ÉRTEKEZÉS TÉZISEI Készítette: JOHANYÁK ZSOLT CSABA
MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Fuzzy szabály-interpolációs módszerek és mintaadatok alapján történő automatikus rendszergenerálás PHD ÉRTEKEZÉS TÉZISEI Készítette: JOHANYÁK ZSOLT CSABA
Pontműveletek. Sergyán Szabolcs Óbudai Egyetem Neumann János Informatikai Kar február 20.
 Pontműveletek Sergyán Szabolcs sergyan.szabolcs@nik.uni-obuda.hu Óbudai Egyetem Neumann János Informatikai Kar 2012. február 20. Sergyán (OE NIK) Pontműveletek 2012. február 20. 1 / 40 Felhasznált irodalom
Pontműveletek Sergyán Szabolcs sergyan.szabolcs@nik.uni-obuda.hu Óbudai Egyetem Neumann János Informatikai Kar 2012. február 20. Sergyán (OE NIK) Pontműveletek 2012. február 20. 1 / 40 Felhasznált irodalom
Programozási módszertan. Mohó algoritmusok
 PM-08 p. 1/17 Programozási módszertan Mohó algoritmusok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu PM-08 p. 2/17 Bevezetés Dinamikus programozás
PM-08 p. 1/17 Programozási módszertan Mohó algoritmusok Werner Ágnes Villamosmérnöki és Információs Rendszerek Tanszék e-mail: werner.agnes@virt.uni-pannon.hu PM-08 p. 2/17 Bevezetés Dinamikus programozás
Nemlineáris programozás 2.
 Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
Optimumszámítás Nemlineáris programozás 2. Többváltozós optimalizálás feltételek mellett. Lagrange-feladatok. Nemlineáris programozás. A Kuhn-Tucker feltételek. Konvex programozás. Sydsaeter-Hammond: 18.1-5,
Online algoritmusok. Algoritmusok és bonyolultságuk. Horváth Bálint március 30. Horváth Bálint Online algoritmusok március 30.
 Online algoritmusok Algoritmusok és bonyolultságuk Horváth Bálint 2018. március 30. Horváth Bálint Online algoritmusok 2018. március 30. 1 / 28 Motiváció Gyakran el fordul, hogy a bemenetet csak részenként
Online algoritmusok Algoritmusok és bonyolultságuk Horváth Bálint 2018. március 30. Horváth Bálint Online algoritmusok 2018. március 30. 1 / 28 Motiváció Gyakran el fordul, hogy a bemenetet csak részenként
2014. szeptember 24. és 26. Dr. Vincze Szilvia
 2014. szeptember 24. és 26. Dr. Vincze Szilvia Mind a hétköznapi, mind a tudományos életben gyakran előfordul, hogy bizonyos halmazok elemei között kapcsolat figyelhető meg. A kapcsolat fogalmának matematikai
2014. szeptember 24. és 26. Dr. Vincze Szilvia Mind a hétköznapi, mind a tudományos életben gyakran előfordul, hogy bizonyos halmazok elemei között kapcsolat figyelhető meg. A kapcsolat fogalmának matematikai
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc. Debrecen,
 MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
MINTA Írásbeli Záróvizsga Mechatronikai mérnök MSc Debrecen, 2017. 01. 03. Név: Neptun kód: Megjegyzések: A feladatok megoldásánál használja a géprajz szabályait, valamint a szabványos áramköri elemeket.
Előfeltétel: legalább elégséges jegy Diszkrét matematika II. (GEMAK122B) tárgyból
 tárgyból") ÜTEMTERV Programozás-elmélet c. tárgyhoz (GEMAK233B, GEMAK233-B) BSc gazdaságinformatikus, programtervező informatikus alapszakok számára Óraszám: heti 2+0, (aláírás+kollokvium, 3 kredit) 2019/20-es tanév
ÜTEMTERV Programozás-elmélet c. tárgyhoz (GEMAK233B, GEMAK233-B) BSc gazdaságinformatikus, programtervező informatikus alapszakok számára Óraszám: heti 2+0, (aláírás+kollokvium, 3 kredit) 2019/20-es tanév
Dinamikus modellek szerkezete, SDG modellek
 Diagnosztika - 3. p. 1/2 Modell Alapú Diagnosztika Diszkrét Módszerekkel Dinamikus modellek szerkezete, SDG modellek Hangos Katalin PE Villamosmérnöki és Információs Rendszerek Tanszék Diagnosztika - 3.
Diagnosztika - 3. p. 1/2 Modell Alapú Diagnosztika Diszkrét Módszerekkel Dinamikus modellek szerkezete, SDG modellek Hangos Katalin PE Villamosmérnöki és Információs Rendszerek Tanszék Diagnosztika - 3.
Közösség detektálás gráfokban
 Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Dunaújvárosi Főiskola Informatikai Intézet
 Dunaújvárosi Főiskola Informatikai Intézet Bizonytalanságkezelés Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Bizonytalan tudás forrása A klasszikus logikában a kijelentések vagy igazak
Dunaújvárosi Főiskola Informatikai Intézet Bizonytalanságkezelés Dr. Seebauer Márta főiskolai tanár seebauer.marta@szgti.bmf.hu Bizonytalan tudás forrása A klasszikus logikában a kijelentések vagy igazak
Mesterséges Intelligencia. Csató Lehel. Csató Lehel. Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 2007/2008
 Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 007/008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció i stratégiák Szemantikus hálók / Keretrendszerek
Matematika-Informatika Tanszék Babeş Bolyai Tudományegyetem, Kolozsvár 007/008 Az Előadások Témái Bevezető: mi a mesterséges intelligencia... Tudás reprezentáció i stratégiák Szemantikus hálók / Keretrendszerek