MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR ANYAGSZERKEZETTANI ÉS ANYAGTECHNOLÓGIAI INTÉZET Miskolc-Egyetemváros.
|
|
|
- Máté Biró
- 5 évvel ezelőtt
- Látták:
Átírás

1 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR ANYAGSZERKEZETTANI ÉS ANYAGTECHNOLÓGIAI INTÉZET 3515 Miskolc-Egyetemváros DIPLOMAMUNKA Feladat címe: Villanymotor állórész tekercselési előgyártmány alakjának optimalizálása DEFORM programrendszer segítségével Készítette: SZÉKELY BENCE MSc szintű, gépészmérnök szakos CAD/CAM szakirányos hallgató Tervezésvezető: DR. LUKÁCS ZSOLT egyetemi docens Miskolci Egyetem, Anyagszerkezettani és Anyagtechnológiai Intézet Konzulens: DR. KOVÁCS PÉTER ZOLTÁN egyetemi docens Miskolci Egyetem, Anyagszerkezettani és Anyagtechnológiai Intézet 2018/2019 tanév, 1. félév
2 MISKOLCI EGYETEM GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR Gépészmérnök mesterszak CAD-CAM szakirány Diplomatervezés A SZÉKELY BENCE Neptun kód: WNRW2F gépészmérnök jelölt részére Szám: SZG- Szerszámgépek Tanszéke 3515 Miskolc-Egyetemváros A TERVEZÉS TÁRGYKÖRE: A FELADAT CÍME: Mechanikai technológiák - Képlékenyalakítás Villanymotor állórész tekercselési előgyártmány alakjának optimalizálása DEFORM programrendszer segítségével A FELADAT RÉSZLETEZÉSE: 1. Végezzen irodalomkutatást és feldolgozást, hogy napjainkban milyen végeselemes célszoftverek segítik a szerszámtervező mérnökök munkáját a térfogatalakító technológiák tervezése területén! 2. Mutassa be részletesen a DEFORM szoftver logikai felépítését, és működésének alapjait! 3. Mutassa be a villanymotor állórész tekercselési technológiájának megvalósítási lehetőségeit! 4. Végezze el a réz előgyártmány alakjának optimalizálását a beépítési magasság minimalizálása céljából DEFORM célszoftver segítségével! TERVEZÉSVEZETŐ: Dr. Lukács Zsolt, ME KONZULENS: Dr. Kovács Péter Zoltán, ME A PROJEKTFELADAT KIADÁSÁNAK IDŐPONTJA: A PROJEKTFELADAT BEADÁSÁNAK HATÁRIDEJE: Dr. Lukács Zsolt 2
3 EREDETISÉGI NYILATKOZAT Alulírott Székely Bence Neptun-kód: WNRW2F a Miskolci Egyetem Gépészmérnöki és Informatikai Karának végzős, gépészmérnök szakos hallgatója ezennel büntetőjogi és fegyelmi felelősségem tudatában nyilatkozom és aláírásommal igazolom, hogy Villanymotor állórész tekercselési előgyártmány alakjának optimalizálása DEFORM programrendszer segítségével című diplomatervem saját, önálló munkám; az abban hivatkozott szakirodalom felhasználása a forráskezelés szabályai szerint történt. Tudomásul veszem, hogy szakdolgozat esetén plágiumnak számít: szószerinti idézet közlése idézőjel és hivatkozás megjelölése nélkül; tartalmi idézet hivatkozás megjelölése nélkül; más publikált gondolatainak saját gondolatként való feltüntetése. Alulírott kijelentem, hogy a plágium fogalmát megismertem, és tudomásul veszem, hogy plágium esetén szakdolgozatom visszautasításra kerül. Miskolc, év..hó..nap.. Hallgató 3
4 Tartalom 1. Bevezetés Térfogat alakító technológiák tervezését segítő szoftverek Térfogat alakítási folyamatok modellezéséhez használt szoftverek típusai QForm MSC.Superforge/Simufact DEFORM A DEFORM szoftver logikai felépítése és működése Villanymotor állórész tekercselési technológiáinak áttekintése Lineáris tekercselés Orsós tekercselő módszer Tűs tekercselés Behúzó tekercselés Előalakított tekercsekkel történő gyártás Folytatólagos hajtűs tekercselés Csoportunk által fejlesztett motorok A tekercselés gyártásának megtervezése VEM szoftver segítségével A külső átmérőn elhelyezkedő tekercsek szimulációi A belső átmérőn elhelyezkedő tekercsek szimulációi Összefoglalás Irodalomjegyzék
5 1. Bevezetés Napjainkban egyre nagyobb fókusz irányul a villamos motorok fejlesztésére. Ehhez nagyban hozzájárul a járműiparban egyre inkább előtérbe kerülő hibrid-, vagy teljesen elektromos hajtásláncok alkalmazása. Az elmúlt években kirobbant dízel botrányoknak köszönhetően a vásárlók körében is egyre népszerűbbek a hibrid hajtású gépjárművek. Ezt erősítik a különböző állami támogatások új, elektromos autóvásárlásnak segítésére, zöld rendszám bevezetése stb.. Emellett a versenysportok fejlesztési irányai is elősegítik, hogy a villamos motorokkal szerelt hibrid vagy elektromos gépjárművek elterjedhessenek, gondoljunk csak a Formula-1 jelenlegi hibrid hajtású autóira, vagy a Formula-E tisztán elektromos hajtású autókat versenyeztető sorozatra. Azonban a járműiparon belül is sok más módon felhasználunk villamos motorokat, például a kormányzás segítésére, ülések, tükrök, ablakok és ajtók mozgatására, vagy elektromos autók esetében fékrásegítés céljából. Ezen túlmenően nagy népszerűségnek örvendenek az elektromos robogók, rollerek, és kerékpárok is. A növekvő vásárlói igénnyel együtt a fejlesztési kényszer is növekszik, hogy a gyártók megtarthassák vagy megnövelhessék részesedésüket a villamos motorok piacán. Munkatársaimmal jelenleg is egy a csoportunk által eddig fejlesztett villamos motoroktól eltérő koncepciójú, azoknál kisebb és hatékonyabb motor kidolgozásával foglalkozunk. Jelen dolgozat keretei között, e motor állórész tekercselésének a VEM szoftver segítségével végrehajtott, geometriai optimalizálását ismertetem. 5
6 2. Térfogat alakító technológiák tervezését segítő szoftverek 1.1. Térfogat alakítási folyamatok modellezéséhez használt szoftverek típusai A végeselemes szoftverek segítségével lehetőség nyílik a megtervezett térfogatalakító technológia virtuális térben történő ellenőrzésére anélkül, hogy rengeteg pénzt és időt kellene a különböző szerszámok legyártására és kipróbálására fordítani. Manapság azok az ipari szereplők tudnak sikeresek lenni, akik a termékeikkel minél rövidebb idő alatt piacra tudnak kerülni. Ennek oka a termékek lerövidülő életciklusa, a gyorsan változó törvényi szabályzások és piaci körülmények. A mérnökök feladata tehát, hogy minél rövidebb határidők alatt is képesek legyenek elsőre jól megtervezni mind a terméket, mind a technológiát, a szigorodó műszaki és gazdaságossági követelmények ellenére is. Ennél fogva az elmúlt évek során széles körben elterjedtek a fémfeldolgozó iparban a praktikus és bevált CAD, CAM és CAE technológiák. A numerikus szimulációs módszerek fejlődése sok új lehetőséget nyitott az ipar és kutatás számára, ilyen például az alakadó folyamatok optimalizálása is. [1] A végeselemes analízis végző szoftverek két fő csoportra oszthatók fel: megkülönbözetünk általános, valamint célorientált szoftvereket. Az általános célú VEM szoftverekkel manapság már bármilyen szimulációt elvégezhetünk, viszont ezek pontos és hatékony használatához jelentős végeselemes háttérismeretek szükségesek. Ilyen szoftverek például az ABAQUS, ANSYS, MARC. Ezzel szemben a célorientált szoftvereket az adott ipari technológiával foglalkozó mérnökök számára fejlesztik, és ezek használatához nem szükséges a végeselemes módszer széles háttérismeretére van szükség, hanem a célterület megfelelő ismeretére. A célorientált szoftverek is egészen sokrétűek. Folyamatosan fejlődnek a felhasználók részéről érkező újabb és újabb igények szerint. Egyes szoftverek a magas technológiai színvonal mellett sok más kiegészítő funkcióval is bírnak, mely a szoftverek árában is megmutatkozik. Legtöbb esetben azonban ezek a szoftverek különböző modulokból állnak össze, amikre külön lehet előfizetni, hogy csak a legszükségesebb alkalmazásokért kelljen fizetni a felhasználónak. [2] E fejezetben néhány célorientált szoftverről szeretnék egy gyors áttekintést adni: QForm Deform3D MSC.Superforge 6

7 2.1. QForm A Qform egyike az alakítási folyamatok szimulációjára használt szoftvereknek. Alkalmazza közvetlenül az ipar, de kutatási problémák megoldására és oktatási célra is széles körben használják. A célrendszerekre jellemzően a szoftver használatához nincs szükségünk véges elemes háttérismeretekre, csak alakítástechnikai alapismeretekre. A szoftver által végrehajtott alakítási folyamat modellezése a felhasználó előtt, mint amolyan fekete doboz működik, és nem igényel beavatkozást a részéről. [3] A szoftvert sok különböző fém alakító folyamat kifejlesztése és optimalizálása során használják a repülőgép-, hadi-, jármű-, és energiaiparban. A program piacvezető folyatási problémák, alakadási feladatok, görgős megmunkálások és alumínium folyatás szimulációjában. [4] Eredetileg a szoftver 2D-s folyamatok szimulációjára alkalmas. Ez a gyakorlatban azt jelenti, hogy egy meghatározott sík mentén vizsgálható az anyag alakváltozása. Ilyen például a tengelyszimmetrikus alkatrészek esetén felmerülő feladatok modellezése,mint ahogy az 1. ábrán látható. Az anyagáramlás az alkatrész meridián metszetében vizsgálható meg, mivel bármelyik a szimmetriatengelyen átmenő meridián metszetben megegyezik az anyagáramlás. [3] 1. ábra - a, tengelyszimmetrikus alkatrész és b, az anyagáramlás szempontjából egyenértékű síkok [3] Az újabb verziójú QForm3D szoftver segítségével azonban már 3D-s problémák megoldásán is dolgozhatunk. Egy 3d szimuláció összeállítása látható a 2. ábrán. A QShape modul segítségével a 2D-s modellek egyszerűen konvertálhatók át 3D-s modellekké, így nincs szükség kétdimenziós keresztmetszetek definiálására. Ugyanebben a modulban lehetőség van egyszerűbb 3D-s geometriák definiálására is, vagy a beimportált elemek kisebb módosítására. [3] 7

8 A szimulációhoz elsődleges fontosságú adat a szerszám és a munkadarab geometriája. Ezeket CAD programból a QShape modulba tudjuk importálni. A szoftver STEP és IGES kiterjesztésű fájlokat tud kezelni, így elkerülhető az STL fájloknál gyakran felmerülő probléma, a geometria pontosságának romlása. Miután megtörtént a geometria importálása, a szerszám és munkadarab anyagparamétereit kell definiálni. Ehhez rendelkezésre áll a szoftver belső adatbázisa is. Ezen felül ki kell választani az alakító gépet, amellyel az alakító műveletet kívánjuk végrehajtani, vagy pedig definiálnunk kell annak technikai adatait. Ezen felül az alakítás során használt kenőanyag tulajdonságit kell még megadnunk a szoftverben. Ha minden szükséges adat a rendelkezésünkre áll, a varázsló segítségével könnyen és gyorsan megadhatjuk a szimulációhoz szükséges paramétereket, majd futtathatjuk is azt. [3] 2. ábra A 3D szimuláció összeállítása a QFORM-ban [5] A szimuláció segítségével vizsgálni kívánt alakító folyamatot először is le kell bontani technológiai alapműveletekre. A műveletek sorba rendezésével pedig előáll a technológiai lánc, melyeket a szoftver egymás után fog végrehajtani és elvégezni a szükséges számításokat. Az alapműveletek külön-külön létre kell hozni a programban, és definiálni kell a lépéshez szükséges paramétereket. Új műveletet csak akkor tudunk létrehozni, ha az aktuális lépéshez már minden szükséges adatot megadtunk. Ezek elvégzése után elvégezhető a szimuláció, ami minden további beavatkozás nélkül fut végig. Miután a szoftver minden számítást elvégzett, megjelenik a munkadarab alakítás utáni végső alakja és a szerszám esetleges alakváltozásai is. Ezt az állapotot 8
![láthatjuk a 3. ábrán. A szimuláció végeztével egyidőben a szoftver létrehoz egy.qfm kiterjesztésű fájlt, melyet megnyitva megkaphatunk minden a szimuláció során kiszámított értéket. [3] 3.](/docs-images/102/155957784/images/9-0.jpg "ábra A szimuláció során kapott feszültésgi értékek [6] A QForm tehát szinte minden fém alakító folyamatot képes szimulálni: hideg-, és meleg alakításokat, nyitott szerszámú kovácsolást, különböző")
![hengerlési módokat, profil folyatást. Továbbá alkalmas hőkezelési feladatok megoldására, így a szövetszerkezeti változásokat és fázisátalakulásokat is képes megbecsülni.[4] (4. ábra) 2.2. MSC.](/docs-images/102/155957784/images/9-1.jpg "Superforge/Simufact 4. ábra a QForm moduljai[4] Az MSC.")
9 láthatjuk a 3. ábrán. A szimuláció végeztével egyidőben a szoftver létrehoz egy.qfm kiterjesztésű fájlt, melyet megnyitva megkaphatunk minden a szimuláció során kiszámított értéket. [3] 3. ábra A szimuláció során kapott feszültésgi értékek [6] A QForm tehát szinte minden fém alakító folyamatot képes szimulálni: hideg-, és meleg alakításokat, nyitott szerszámú kovácsolást, különböző hengerlési módokat, profil folyatást. Továbbá alkalmas hőkezelési feladatok megoldására, így a szövetszerkezeti változásokat és fázisátalakulásokat is képes megbecsülni.[4] (4. ábra) 2.2. MSC.Superforge/Simufact 4. ábra a QForm moduljai[4] Az MSC.Superforge vagy Simufact (2008 óta utóbbi néven forgalmazzák) egy kifejezetten a kovácsolásra és térfogatalakító eljárások szimulálására készített szoftver ipari és kutatási felhasználásra. A program rendelkezik mind 2D-s, mind pedig 3D-s véges elemes megoldóval is. Ez volt az első olyan program, mely háló nélküli szimulációk futtatását is lehetővé tette. [7] 9
.")
10 5. ábra Simufact forming moduljai A véges elemes eljárások mellett képes véges térfogati elemes számítások elvégzésére is. Utóbbi módszert leggyakrabban folyadékok vagy gázok áramlási problémáinak a számításához használják, de ez a szoftver szilárd testes feladatok megoldásaihoz is felkínálja ezt a módszert (5. ábra). A véges térfogatok módszere egyszerre gyors és pontos, mivel az anyagáramlás számításait egy nem deformált véges térfogatú hálón kell elvégezni, és megbízható az újra hálózási technikák teljes mellőzésének köszönhetően. Ettől függetlenül a program egy véges elemes megoldót is kínál 2D-s és 3D-s esetekre is (lásd 6. ábra), ezáltal is kiszélesítve a program felhasználhatóságát, mivel számos olyan eset van, mikor a véges elemes módszerek használata célszerűbb a véges térfogatú módszernél. Ehhez az integrált tetraéderes hálógenerátor modult használhatjuk. [9] 6. ábra Több lépcsős hidegalakítás 3D szimulációja a Simufact szoftverben [10] A szimuláció összeállításához több különböző formátumból be tudja olvasni a CAD szoftverrel elkészített geometriákat: STL, DXF, Nastran, vagy VRML formátumot is tud kezelni. Következő lépésben a szerszámokat, préseket kell meghatározni, melyhez rendelkezésre áll a program belső adatbázisa. Amennyiben ezek közül nem találunk megfelelőt, definiálhatunk saját gépeket is és hozzáadhatjuk az adatbázisunkhoz. Ezen túl meg kell adni még az anyag fő jellemző paramétereit, melyhez szintén segítségül hívhatjuk a szoftver belső adatbázisát, amely tartalmazza az Egyesült Államokban, Németországban és Japánban leggyakrabban használt anyagokat. Utolsó lépésben meg kell még adni a súrlódási és hőmérsékleti viszonyokat. A munkadarab pozícionálása után, indítható is a szimuláció. [7], [8], [9] 10

11 A szoftver a számítások elvégzése után a következő eredményeke tárja a felhasználó elé, melyek közül néhány a 7. ábrán látható: Anyagáramlás Szerszámkitöltés A sorjásodó régiók feltárása Szerszámkopás és sérülés előrejelzése Szerszámterhelések és a szerszámban ébredő feszültségek Részecskék nyomon követése 7. ábra A szimulációk előkészítése és eredmények megjelenítése a Simufact szoftverben [10] Az MSC.Superforge / Simufact szoftverek tehát a véges elemes és véges térfogatos módszerek előnyeit kombinálva képesek a szimulációs feladatok gyors és pontos kiszámítására. 11

12 2.3. DEFORM A DEFORM szimulációs programrendszer a kezdetekben kifejezetten a meleg kovácsolás folyamatainak szimulálására lett kifejlesztve. Manapság a DEFORM rendszer az egyik legelterjedtebb fémalakítási célorientált szimulációs szoftver. A program fejlesztői egy sor különböző modult kínálnak a szoftverhez, hogy az adott szimulációs feladat követelményeinek maradéktalanul megfeleljen a program rendszer. A szoftver alkalmas kovácsolás, hideg fejezés, forgácsolás, hőkezelés, hengerlés, mechanikai kötések, stb. szimulálására. [11] A programcsalád fő termékei: DEFORM-3D: egy rugalmas és nyitott rendszer, amely képes a különböző alakváltozások, hőtani folyamatok és mikroszerkezeti változások vizsgálatára 3D modellek esetén (lásd 8. ábra) 8. ábra Behálózott 3D geometria a DEFORM3D szoftverben [11] DEFORM-2D: egy rugalmas és nyitott rendszer, amely képes a különböző alakváltozások, hőtani folyamatok és mikroszerkezeti változások vizsgálatára, amennyiben tengelyszimmetrikus munkadarabot (9. ábra) vagy síkbeli feladatot szeretnénk kiszámítani 12
![9. ábra Tengelyszimetrikus alkatrész vizsgáalata DEFORM 2D szoftverben [11] FORMING EXPRESS (3D): egy könnyen használható 3D modellező rendszer mely alkalmas kovácsolás, fejezés,](/docs-images/102/155957784/images/13-0.jpg "folyatás, mélyhúzás, illetve más hagyományos alakítások vizsgálatára FORMING EXPRESS (2D): egy könnyen használható 2d rendszer mely alkalmas kovácsolás, fejezés, folyatás, mélyhúzás,")
 10.")
13 9. ábra Tengelyszimetrikus alkatrész vizsgáalata DEFORM 2D szoftverben [11] FORMING EXPRESS (3D): egy könnyen használható 3D modellező rendszer mely alkalmas kovácsolás, fejezés, folyatás, mélyhúzás, illetve más hagyományos alakítások vizsgálatára FORMING EXPRESS (2D): egy könnyen használható 2d rendszer mely alkalmas kovácsolás, fejezés, folyatás, mélyhúzás, illetve más hagyományos alakítások vizsgálatára DEFORM-HT: külön programként és megvásárolható hőkezelések és szövetszerkezeti változások szimulációjára. Opcionálisan hozzáadható a DEFORM- 2D vagy DEFORM-3D licenszhez, hogy a szövetszerkezeti változások az alakváltozás során is vizsgálhatók legyenek (lásd 10. ábra) 10. ábra Hőkezelési szimuláció a DEFORM-HT szoftverben [11] 13
14 3. A DEFORM szoftver logikai felépítése és működése A szoftver minden olyan komplex kihívás megoldására lehetőséget nyújt, amelyekkel a mérnöki gyakorlatban találkozhatunk. Jelen feladat szempontjából a képlékenyalakítás a legfontosabb, de a szoftver segítségével megoldhatunk hőkezelési és forgácsolási eljárásoknál fellépő problémákat is. [13] 11. ábra - DEFORM logikai felépítése [13] Ahogy a fenti 11. ábra is szemlélteti a DEFORM lehetőséget biztosít összetett kölcsönhatások modellezésére az alakválzotások, hőmérsékletváltozás és fázisátalakulások figyelembe vételével azáltal, hogy a moduljai összekapcsolódnak egymással. A program elvi felépítésének ábrája jól szemlélteti, hogy az anyagparaméterek és ezen belül is a karbon tartalom kiemelt jelentősségel bír.[13] A szoftver adatbázisában megtalalálhatjuk a legáltalánosabban használt fémek anyagtulajdonságait, de a program lehetőséget biztosít arra is, hogy a saját méréseink alapján újabb anyagokat definiáljunk és adjunk hozzá a rendszerhez, hogy később ezeket a valós paramétereket használhassuk a szimulációnkhoz. Továbbá megtalálhatóak az adatbázisban különböző alakító szerszámok azok mozgásviszonyaival előre definiáltan, de rendelkezésre állnak anyagáramlási, kovácsóló erő, matrica kitöltési és feszültségeloszlások numerikus meghatározást lehetővé tevő összefüggések, valamint merev és képlékeny anyagmodellek, melyek segítségével nagy alakváltozások modellezhetőek. Attól függően, hogy mennyire lehetséges leegyszerűsíteni a problémát, lehetőségünk van két-, vagy háromdimenziós modelleket is szimulálni. [13] 14

15 A programot megnyitva az általános főmenü felület tölt be, mely a 12. ábrán látható. A képernyő jobb oldalán jól elkülönítve láthatjuk a véges elemes modelelzésre jellemző három fő folyamatot: A szimulációs modell összeállítására szolgáló Pre Processor modul. Ebben a modulban kell a mérnöki problémát a szoftver számára érthető nyelvre lefordítani és létrehozni a véges elemes modellt A már összeállított modell lefuttatására szolgáló Simulator modul. Itt lehetséges magát a szimulációt elindítani illetve annak állapotot felügyelni és nyomon követni Amennyiben a szimuláció gond nélkül lefutott a Post Processor modulban a vizuális megjelenítésnek köszönhetően akár lépésenként ellenőrizhetjük az eredményt. 12. ábra - DEFORM főmenü A Pre processor modul megnyitása után kiválaszthatjuk milyen műveleteket szeretnénk végrehajtani a munkadarabunkon. A Deform-ban, amennyiben a Multiple Operations nevű paranccsal indítjuk el a Pre Processort lehetőség van több egymást követő megmunkálást összefűzni és ezeket egyben szimulálni ahelyett, hogy külön-külön az egyes eredményeket újra és újra be kellene importálni és újra elindítani. Ilyenkor elsőként a műveleteket kell definiálni sorrendben, majd végigmenni mindegyiken és azokon belül beállítani a kívánt paramétereket. Esetemben most egyetlen deformációt fogok végrehajtani, ennek megfelelően a Deformation-t adom hozzá fához. Ezt a 13. ábrán látható párbeszédablakban tudom kiválasztani. 15
 szerszámok.")

16 13. ábra - Gyártási műveletek kiválasztása A műveleteken belül mindig meg kell adni, hogy hány darabból áll össze a szimuláció, és mik azok, illetve milyen tulajdonságokkal bírnak. Minden esetben kell, hogy legyen egy munkadarab, továbbá amennyiben szükséges (hevítés és hűlés szimulációjához nem feltétlen kell) szerszámok. A meghatározott objektumokat a következő öt csoport valamelyikébe kell besoroljuk: merev, elasztikus, plasztikus, porózus, elaszto-plasztikus. Az erre a célre szolgáló párbeszéd ablak látható a 14. ábrán. A szimulációs számítások felgyorsítása miatt a szerszám elemeket érdemes merevre állítani, így a program ezeket az elemeket nem hálózza be és nem számol azok esetleges alakváltozásaival és a benne ébredő feszültségekkel. 14. ábra - Objektumok definiálása Az objektum típusának megadása után, annak geometriáját kell definiálni következő lépésben. A szoftveren belül lehetőségünk van létrehozni egyszerűbb geometriákat, viszont kicsit is bonyolultabb modellek létrehozására már nem alkalmas a program. Ezt kiküszöbölendő, viszont lehetőség van CAD fájlok beimportálására. Miután definiáltam az objektumokat a 15. ábrán látható családfa áll elő a képernyő jobb oldalán. 16

17 15. ábra - Szimulációs családfa Mivel a munkadarabot plasztikusnak határoztam meg, ezért szükséges hálót definiálnom rá. A hálót egy rácsszerkezetként láthatjuk, ez reprezentálja a testet a szoftver számára. Háló nélkül a szoftver nem érzékelné a munkadarabot és nem tudná elvégezni a kívánt számításokat azon. Kétdimenziós modellek esetében a háló állhat háromszögekből, vagy négyszögekből. Háromdimenziós modellek esetén pedig a háló tetraéderekből vagy téglatestekből áll össze. Ezen elemek rácsszerkezetének érintkező pontjait hívjuk csomópontoknak. Egy elem az anyag egy bizonyos területéhez tartozik, a csomópont viszont egy diszkrét pont a térben. 16. ábra - Hálósűrűség hatása a szimulációra [12] A hálóelem geometriáján kívül be kell még állítani azok nagyságát, azaz a háló sűrűségét. Ahogy a 16. ábrán is látható, minél sűrűbbre hálózzuk a munkadarabunkat, annál pontosabban 17


18 írjuk le a geometriát a véges elemes szoftver számára, ezáltal a számítás eredménye is pontosabb lesz. Mivel ebben az esetben több csomópont lesz, aminek a helyzetét ki kell számolnia a programnak, értelemszerűen a számítási idő is drasztikusan megnő. Ebben az esetben a célom egy egyszerű, működő szimuláció összeállítása, ezért alacsony elemszámot határozok meg és között tudom a programban állítani az elemszámot, én ezt re állítom be, ahogy a 17. ábra is mutatja. 17. ábra - Háló paramétereinek meghatározása A háló elkészültével a munkadarab anyagát szükséges definiálni, melyet a 18. ábrán látható ablakban tehetünk meg. Az anyagtulajdonságok megadása, a vizsgálni kívánt folyamat függvényében az egyszerű egyenletektől a bonyolult többparaméteres egyenletekig változhat. Az alakítási folyamatok modellezéséhez az egyik legfontosabb jellemző az anyag folyásgörbéje. A program lehetőséget biztosít arra, hogy ezt különböző mechanikai-matematikai modellekkel is megadhassuk. [13] 18. ábra - Anyagmodell definiálása Ezen felül viszont lehetőségünk van a szoftverben rendelkezésünkre álló belső alapanyag könyvtárt használni, és az előre definiált anyagok valamelyikét használni, amennyiben az 18

19 megfelelő a számunkra. Ez tartalmazza az ipari alkalmazásban leggyakrabban felmerülő fémeket. Ezeket az Amerikai, Európai, Japán, Orosz, Brit, Koreai és az ISO nemzetközi szabványok szerint kategorizálták a könyebb átláthatóság érdekében. Miután az anyagjellemzőket is meghatároztam következő lépésben az összeállított modell mozgásviszonyait kell beállítanom. A programban külön definiálhatunk egyenes vonalú, illetve forgómozgásokat, illetve választhatunk előre definiált szerszámok mozgásai között is. Az erre szolgáló ablak látható a 19. ábrán Egyenes vonalú mozgásoknál megadhatjuk az objektumok mozgását annak sebességével, vagy a testet mozgató erő segítségével. Forgómozgások esetében pedig a szögsebességet, vagy a forgatónyomatékot tudjuk beállítani. Az általam összeállított szimulációban a felső szerszámnak határoztam meg 0,5 mm/sec mozgást. A szimuláció stop kritériumának a két szerszám közötti 75mm Z tengely menti távolságot állítottam be, de ez is megadható lenne eltelt idő alapján is. 19. ábra - Az objektumok mozgásviszonyainak definiálása A mozgásviszonyok definiálása után meg kell adni a szoftvernek az esetleges peremfeltételeket. Jelen esetben nem kötöm meg a munkadarab egyetlen szabadság fokát sem. Amit viszont még meg kell adnom, az az érintkező felületek súrlódási együtthatója. Erre vonatkozóan is van a szoftverben előzetesen megadva néhány érték, a szerszám anyagok és hőmérsékletek függvényében. Ez megtekinthető a 20. ábrán. Ezek közül az acél szerszámokkal történő hidegalakítási opciót kiválasztva, a súrlódási együtthatót μ=0,12 értékre állítom be. 19

20 20. ábra - Objuktomok viszonyának definiálása Ezek után még a szimuláció futását szabályozó paramétereket be kell állítani: mekkora lépésközzel számoljon a program, hány lépést vizsgáljon meg, illetve milyen feltétel teljesülésével fejezze be a számítást. A szimulációt idő alapú megoldásra állítom konstans 0.1 másodperces növekménnyel. Lehetőségünk van a programban arra is, hogy csak minden X.-ik lépést számítson ki a szoftver, ha a köztes állapotok nem fontosak a számítás során. Hidegalakítási feladatoknál érdemes minden egyes lépés kiszámolását beállítani. Elsődleges szerszámnak a külső gyűrűt állítom be, aminek a mozgását is definiáltam korábban. A szimuláció adatbázisának ellenőrzése és generálása után le is futtatható a szimuláció. Miután a szimuláció végig futott, a Post processor-t elindítva megvizsgálhatom az eredményt. A 21. ábrán látható az utolsó lépése a szimulációnak. A szerszámokat elrejtve részletesebben is megnézhetjük a munkadarabot, illetve színskálával ellenőrizhetjük különböző mérőszámok szerint, hogy milyen igénybevételek érték azt. A 21.ábrán látható például a test feszültségi állapotának ábrázolása az alakítás közben, a 22. ábrán pedig a szerszám által kifejtett erő. 20

21 21. ábra - Az alkatrész feszültségi állapota A szoftver segítségével továbbá lehetőségünk van a szerszámra ható erők meghatározására is (lásd 22. ábra). Ezek az adatok hasznos paraméterek lehetnek a szerszámtervező számára. 22. ábra - Az objektumokra ható Z irányú erő az idő függvényében A DEFORM tehát egy olyan végeselemes célszoftver, mellyel könnyen és gyorsan elvégezhetem majd a tekercs előgyártmányának geometriai optimalizálását. 21

22 4. Villanymotor állórész tekercselési technológiáinak áttekintése Az elektromos motorok gyártási folyamata már hosszú ideje változatlan és valószínűleg a fő lépések nem is fognak lényeges változáson átmenni az elkövetkező időkben. Ettől függetlenül ezek a lépések felcserélődhetnek, és egyenként tovább fejleszthetőek, hogy a kívánt költség célok és a kitűzött technológiai paraméterek elérhetőek legyenek. Alább a 23. ábrán látható a klasszikus gyártási folyamata az álló-, és forgórésznek. 23. ábra - A motor gyártásának fő lépései Egyik legfontosabb és a motor tulajdonságait leginkább befolyásoló részfolyamat a tekercselés kialakítása. Ennek megfelelően erre fordítottuk a legnagyobb figyelmet, és megvizsgáltuk milyen lehetséges módon lehet kialakítani a motor tekercselését. Kézzel végzett tekercseléseket nem vizsgálunk, mivel nagy sorozatban gyártott motorhoz szeretnénk technológiát választani, és a megfelelő gyártási ciklus idő eléréhez automata tekercselési módszerek jöhetnek csak szóba. A klasszikus tekercselési módokon kívül megvizsgáljuk még az előre formázott tekercsek és lapított drótok alkalmazásást is Lineáris tekercselés Ez egy széles körben alkalmazott technológia. Nevét a drótok elhelyezésének módja alapján kapta. A drót megvezető mozgása és a tekercselő orsó forgómozgása egymással összehangoltak, állandó sebességgel történik a tekercselés. Leginkább forgásszimmetrikus elemek tekercselésére használják. Alább a 24. ábrán látható a sematikus ábrája a tekercselésnek.[14] 24. ábra - lineáris tekercselés elve vázlata [14] 22
23 Lineáris tekercselést alkalmaznak még a szegmentált állórészeknél a különálló szegmensek megtekercseléséhez. Alkalmaznak előre formázott lapított drótot is a jobb rézkitöltési tényező elérése céljából, bár mint a hasáb alakú fog, mind pedig a drót lapítása tovább nehezítik a tekercselés kialakítását, így a tekercselési sebesség nem hasonlítható össze a kör keresztmetszetű drótéval. [14] 4.2. Orsós tekercselő módszer Ez a módszer a nevét a szintén mozgásáról kapta, mikor is a tekercselő gép a tekercselő szerszámot forgatja gyorsan a tekercselendő elem körül. A tekercseletlen alkatrészt mereven rögzíteni kell, majd a tekercselő kar a drót által vezetett forgómozgás segítségével megtekercseli az alkatrészt a kívánt séma szerint. A fő különbség a lineáris tekercseléshez képest, hogy itt nem a tekercselendő alkatrészt mozgatjuk, hanem a drótot vezetjük körbe az alkatrész körül. Ez látható a 25. ábrán is. Ezt a módszert nagytömegű alkatrészek tekercseléséhez használják leginkább, de alkalmazható kisebb méretű alkatrészekhez és szegmentált elemekhez is, illetve a behúzó tekercselés (lásd 4.4.) előtekercseléséhez is használják.[14] 25. ábra - Orsós tekercselés sémája [14] 4.3. Tűs tekercselés Az előző két módszerrel ellentétben a tűs tekercselés nem a mozgásának köszönhetően kapta az elnevezését, hanem a tekercselő szerszám geometriai kialakítása után, mely a 26. ábrán látható. A drót megvezetése ténylegesen egy tűvel történik, ami bejárja azt az egész utat, ahol a tekercs végül el fog helyezkedni a tekercselendő test körül. A tekercselés mozgásai, a tű tartó emelkedéseinek és ereszkedéseinek kombinációjából, illetve az állórész elfordulásából állnak össze. Viszonylag egyszerű berendezéssel megoldható a az egyszerű mozgásoknak köszönhetően, 23
![viszont alacsonyabb rézkitöltés érhető el vele, köszönhetően annak, hogy a tekercselő tűnek el kell férnie a két tekercs között, így ott levegő marad. Minden jól megfigyelhető a 26. ábrán is.[14]](/docs-images/102/155957784/images/24-0.jpg "4.4. Behúzó tekercselés 26. ábra - Tűs tekercselés elvi ábrája [14] Ez a módszer több lépésből tevődik össze (lásd 27. ábra).")

24 viszont alacsonyabb rézkitöltés érhető el vele, köszönhetően annak, hogy a tekercselő tűnek el kell férnie a két tekercs között, így ott levegő marad. Minden jól megfigyelhető a 26. ábrán is.[14] 4.4. Behúzó tekercselés 26. ábra - Tűs tekercselés elvi ábrája [14] Ez a módszer több lépésből tevődik össze (lásd 27. ábra). Első lépésként a tekercselő szerszám a kívánt mennyiségű menetben felviszi ideiglenes megvezető elemekre a drótókat. A megveztő elemeket ezután az állórész felé poziciónálják, majd a következő lépésben pedig egy újabb szerszám segítségével megtekercselik a statort. Ehhez egy újabb szerszámra van szükség, amely lehúzza a drótokat a megvezető alkatrészről, és keresztülvezeti az állórész hornyain. Ezt a folyamatot annyiszor szükséges megismételni, ahány fázisú motorunk van. Ha minden fázis tekercse a helyére került, egy utólagos préseléssel még mindkét oldalon összerendezhető és zsugorítható az állórészből kilógó tekercsek mérete. Ezzel a módszerrel sokkal jobb ciklus idő érhető el, mint például a tűs tekercseléssel.[14] 27. ábra - Behúzó tekercselés elvi ábrája [14] 24
25 4.5. Előalakított tekercsekkel történő gyártás Számos különböző tekercselési módszert sorolnak az előalakított tekercselési eljárás fogalma alá. Ennél fogva számos névvel is illetik a különböző előalakított tekercseket a formájuk és a kialakításuk alapján. A 28. ábrán látható például egy U drótos tekercselés. Többek közt említést tesznek szimpla és dupla gyémánt tekercsről, hajlított és egyenes koncentrikus tekercsről, és úgynevezett beszúró tekercsről. Továbbá ide sorolandó a Roebel-rúd is. A beszúró-, vagy hajtűtekercs viszonylag széles körben elterjedt, mivel az előgyártmánya könnyen gyártható és jól kezelhető. Ezzel szemben, mint minden előalakított tekercs esetén, a további gyártási lépések, a sok különálló tekercs elem összekapcsolása, már jóval nehezebb feladat lehet. [14] 28. ábra - Beszúró tekercs alakítási lépései [14] 4.6. Folytatólagos hajtűs tekercselés Ez a gyártási technológia olyan tekercselési alternatívát képvisel, amely egy folyamatos négyszög vagy négyzet szelvényű dróthuzalból áll. Az effajta állórész tekercselés gyártásának a nehézsége, hogy az erős, négyszög keresztmetszetű huzal nem hajlítható olyan könnyen, mint a hagyományos drótok. Első lépésben a motor fázisainak számával megegyező számú különálló húrt kell legyártani egy speciális hajlító géppel. Ezt követően egymásba kell helyezni őket, ahogy a 29. ábrán is látható, ezáltal létrehozva a teljes tekercselést. Végül pedig az egész tekercselést a szigetelt állórészbe kell helyezni, egy szerszámmal egy köztes lépésen keresztül. A legnagyobb nehézsége ennek a technológiának a drótcsomag behelyezése az állórészbe a drótok vagy a szigetelés megsértése nélkül. Ez az eljárás kombinálja az előnyeit a klasszikus kör keresztmetszetű tekercselési technológiáknak és a beszúró tekercselésnek. [14] 25
![29. ábra - Folytatólagos hajtűs tekercs vázlata [14] 4.7. Csoportunk által fejlesztett motorok Jelenleg két szériagyártásban futó motorcsalád fejlesztésével foglalkozik a csoportunk.](/docs-images/102/155957784/images/26-0.jpg "A következőkben röviden összefoglalom ezek előnyeit és hátrányait a tekercselés kialakításának szempontjából. 4.7.1. A 18/14 topológiájú motorcsalád 30. ábra - 2.")

26 29. ábra - Folytatólagos hajtűs tekercs vázlata [14] 4.7. Csoportunk által fejlesztett motorok Jelenleg két szériagyártásban futó motorcsalád fejlesztésével foglalkozik a csoportunk. A következőkben röviden összefoglalom ezek előnyeit és hátrányait a tekercselés kialakításának szempontjából A 18/14 topológiájú motorcsalád 30. ábra - 2. generációs állandó mágneses szinkron motor A 18/14 motor platform fejlesztése 2009-ben indult. Célja egy skálázható, magas hatásfokú piacvezető termék kifejlesztése volt, 4-8 Nm névleges nyomatéktartományra. A hatásfok növelése érdekében szegmentált állórész kialakítás és lineáris tekercselési technológia alkalmazása mellett döntöttek, így növelve az állórész lehetséges rézkitöltését. A motorcsalád 26

27 elődjét, az első generációs állandó mágneses szinkron motor állórészét még behúzó tekercseléssel gyártották. Az állórész maga teljesen körbevágott lemezekből állt össze, ez látható a 30. ábrán. A szegmentált állórész gyártása a tekercselés kialakításának szempontjából könnyű feladat, viszont a tekercselt szegmenseket aztán újra össze kell építeni egy minél pontosabb hengerré. Ez a folyamat a különálló szegmensek tűrései, és a lézerhegesztéssel történő összeállítás során fellépő nagy hőterhelések deformáló hatásai miatt sem egyszerű A 12/8 topológiájú motor család 31. ábra 3. generációs állandó mágneses szinkron motor Ezt a motorcsaládot a 18/14 topológiájú motorok leváltására fejlesztették ki. A motorok mindenben különböznek egymástól. A fejlesztők visszatértek az egy darabban kivágott lemezekből épített állórészhez a szegmensek helyett (lásd 31. ábra), ezáltal kisebb hengeresség hibája van az állórésznek. Ebből fakadóan a lineáris tekercselési technológiát már nem tudták alkalmazni, ezért át kellett térni a tűs tekercselésre. A tűs tekercselés sajátossága viszont, hogy kis rézkitöltési tényező érhető el vele, ugyanis az állórész hornyaiban mindig fennmarad a réztekercseket bevezető tű helye. Ennél fogva a motor fő méretein, mind a hosszán, mind pedig az átmérőjén növelni kellett, hogy ugyanarra a teljesítményre legyen képes, mint az elődje. Célunk tehát most egy olyan motor kifejlesztése, amely kisebb méretű az eddigieknél, és az első két generáció előnyös tulajdonságait egyesíti. A 12/8 topológiájú motorcsaládból merítve megtartjuk az egy darabban kivágott lemezekből épített állórész koncepcióját. Ugyanakkor az eddigiektől eltérő tekercselési technológiát kell alkalmaznunk ahhoz, hogy a 18/14 topológiájú motor nagy rézkitöltési tényezőjét is megtartsuk. Ennél fogva a beszúró tekercseléses technológiára esett a választásunk. 27
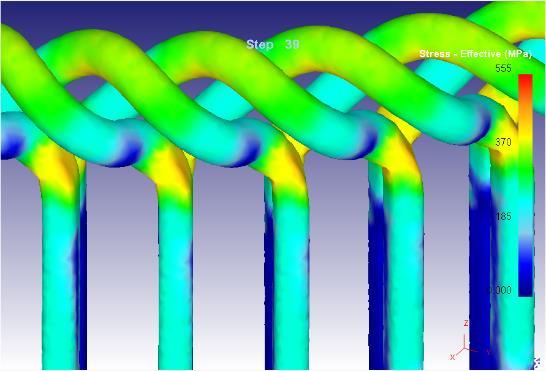
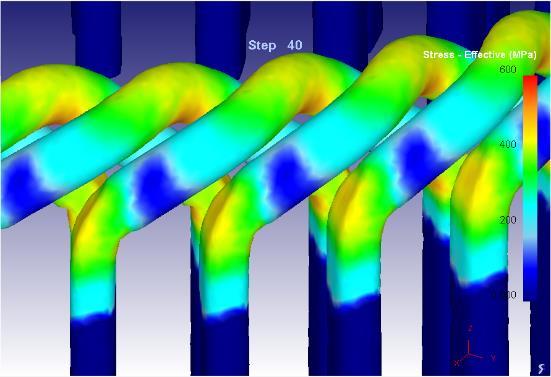
28 5. A tekercselés gyártásának megtervezése VEM szoftver segítségével A tekercselés kialakítása különböző gyártási technológiákkal megoldható. Elsősorban ciklusidőket figyelembe véve mi az úgynevezett hajtűs tekercselés irányába indultunk el a fejlesztés során. Ez a gyártástechnológia könnyedén automatizálható, ezáltal gyorsan és pontosan lehet a segítségével a szükséges drótokat előállítani. A hajtűs tekercselés elve, hogy az előkészített drótokat behelyezünk egymás mellé egy csavaró szerszámba, és amíg az egyik lábát fixen megfogjuk a drótnak, addig a másikat a kívánt pozícióba forgatjuk. Ezáltal az előgyártmány szerszámból kilógó része szabadon alakulhat, és így létrejön a 32.ábrán látható narancs színnel jelölt drótokéhoz hasonló formájú geometria. Ahhoz, hogy a csavarás során a tekercsek ne ütközzenek egymással és ne sértsék meg egymást, pontosan meg kell határozni az előgyártmány geometriai paramétereit. Ezen felül fontos, hogy a végső geometria lehetőség szerint a motor axiális hossza miatt minél alacsonyabb legyen és a lehető legkisebb legyen a drót kiterített hossza, a motor belső ellenállása és az alapanyag költségek miatt. A különböző drót előgyártmány geometriákkal való gyártás közbeni kísérletezés a projekt szempontjából több dolog miatt is megengedhetetlen. Egyrészt nagyon lassú és hosszú folyamat lenne és veszélybe kerülne a szériagyártás és a piacra kerülés tervezett határideje. Illetve ha nagyobb változtatásokra is szükség lenne a geometrián, akkor adott esetben rengeteg költséggel járhat az újabb és újabb prototípus szerszámok megterveztetése és legyártatása. Ahhoz, hogy mégis összegyűjtsük a szükséges tapasztalatokat, hogy hogyan viselkednek az egyes előgyártmányok, virtuálisan viszonylag egyszerűen és gyorsan letesztelhetőek a különböző geometriák. A szimulációk elvégzéséhez először elő kell állítsam a motor állórészének 3D modelljét. Ezt a mágnes kört tervező kollégámtól kapott 2D vázlat geometria és kapcsolási rajz alapján végeztem el az NX CAD rendszerében. Ez a 32. ábrán látható. Az állórész hornyának felületéből kiszámoltam a még megengedhető drót keresztmetszetet. Ez alapján kollégáimmal a D=1,974 mm nominális átmérőjű drótot választottuk a tekercs alapanyagaként. A kapcsolási rajz alapján elkészítettem a tekercselések egy elméleti, közelítő geometriáját. Ez azért is hasznos, mert ennek a geometriának a vezérgörbéjét megmérve megkapom az elméleti kiterített hosszát a tekercs fejének, amit a különböző előgyártmány geometriák létrehozásánál fel tudok használni. Ezeket a releváns fejezetekben, a konkrét szimulációk leírásánál ismertetem. 28

29 32. ábra - A tervezett motor állórészének 3d modellje 5.1. A külső átmérőn elhelyezkedő tekercsek szimulációi A geometria optimalizálására a szimulációkat minden esetben ugyanazokkal a paraméterekkel futtattam le. A vizsgált geometriák megkülönböztetésére a külső átmérőn lévő drótokat K, a belső átmérőn elhelyezkedő drótokat pedig B jelzéssel láttam el. A K és B jelű tekercsek különböző változatait pedig sorszámmal láttam el a könnyű azonosíthatóság érdekében. A szimuláció alapvető paramétereit az fejezetben a legelső előgyártmány geometria szimulációján keresztül ismertetem A K1 előgyártmány geometria Kiindulásnak a lehető legegyszerűbb geometriát választottam. Bár a szakirodalmak a legtöbbször P és Ω formák használatáról szólnak a beszúró tekercselési technológia esetében, illetve ez a geometria vélhetőleg a legkisebb hajlítási sugár kritériumának sem felelne meg, a forma egyszerűsége miatt úgy gondoltam érdemes ezzel kezdeni a vizsgálatot (lásd 35. ábra). Az előgyártmány, illetve a szerszámok modelljét az NX CAD rendszer segítségével állítottam elő. Ahhoz, hogy ezt a DEFORM szoftverbe felhasználhassam.stl kiterjesztésű fájlként mentettem el külön az alkatrész és szerszmámok modelljeit. Bár van lehetőségem a végeselemes szoftverben is pozícionálni a darabokat, mivel azt már a CAD programban elvégeztem a modellek az importálás során megőrzik helyzetüket a fő koordináta rendszerben. 29


30 A szimulációk egyszerűsítése miatt a két szerszámelemet merev testként határoztam meg, így a szoftver ezek alakváltozásaival és a bennük ébredő feszültségekkel nem számol. A munkadarabot plasztikus testként definiáltam, hogy ennek az alakváltozását és a feszültségi állapotát kiszámíthassam a szoftverrel. Az előgyártmány anyagának a szoftver könyvtárából választottam a legegyszerűbb réz anyagát: CuC2 Copper. A DEFORM programban különböző mechanikai-matematikai modellekkel definiálhatóak a folyásgörbék. A 33. ábra mutatja az általam választott anyag modell matematikai alakját. 33. ábra - A folyásgörbe és annak meghatározására használt matematikai modell Fontos ezen felül a rugalmas viselkedést leíró egyenletek és paraméterek megadása is, esetemben ezek is előre definiálva vannak az általam kiválasztott anyagban. A rugalmas viselekdés leírására Hooke által megfogalmazott lineárisan rugalmas anyagtörvényt használhatjuk, melynek legfontosabb paramétere a Young modulus. Ezek a paraméterek láthatók a 34. ábrán. 34. ábra - Az anyag rugalmas viselkedését leíró paraméterek 30
31 A legjobb megoldást persze akkor kapnánk, ha kísérletileg felvennénk az aktuálisan használt réz alapanyag kívánt tulajdonságait, ám a projekt jelenlegi fázisában ez még nincs véglegesen eldöntve, illetve munkahelyem sem járult hozzá a jelenlegi adatok nyilvánosságra hozatalához. A következő lépésben a hálót kell definiálnom. Mivel az alakító szerszámokra ható igénybevételekkel most nem kell számolnom így csak a munkadarabra kell hálót létrehoznom. A DEFORM szoftver ezt amutomatikusan elvégzi, nekem csak a hálóelemek alakját és a háló elemszámát kell meghatároznom. Választható tetraéderes, vagy a nagyon egyszerű geometriákhoz téglatestes hálóelem. Erre az esetre tetraéderes hálót és elemszámot határoztam meg. Ez az érték viszonylag alacsony az 1000-től ig terjedő skálán, de a 36. ábrán is jól látszik, hogy az alkatrész kis mérete miatt már ez is egészen sűrű hálónak hat. 35. ábra - A K1 geometria fejrészének semleges hajlítási szála Ezután a szerszámok és a munkadarab kinematikai viszonyait kell megadnom. Ebben az esetben a nagyobb átmérőre eső szerszám fogja a csavarómozgást végezni, és az előgyártmány külső lábát elcsavarni a kívánt pozícióba, így ezt állítom be az elsődleges szerszámként. A belső átmérőn lévő szerszám feladata, hogy fixen megfogja a munkadarab belső lábát az alakítás során. Mivel ez mozgást nem végez, ez lesz a másodlagos szerszám. Ezen felül meg kell határozni a szerszámok viszonyát a réz előgyártmánnyal szemben is. Mindkét esetben a tekercs az alakváltozás elszenvedő elem, a szerszámok pedig az alakító elemek. A súrlódási viszonyok 31
32 meghatározásában is segít a szoftver, mivel választhatunk több különböző előre definiált értékből. A szimulációimhoz az acél szerszámokkal történő hidegalakítás opciót választom, melynek köszönhetően a súrlódási együttható értéke 0,12-nek adódik. 36. ábra - A "K" jelzésű előgyártmányok szimulációjának összeállítása Következő lépésben meg kell adni, hogy pontosan milyen mozgást végezzen az elsődleges szerszám. Forgómozgás esetén nyomatékkal vagy szögsebességgel definiálhatjuk a mozgást, ami lehet konstans, vagy változhat az idő, esetleg a szög függvényében. Mivel nem tudom mekkora nyomatékra lenne szükség a drót lábának 22,5 -kal történe elcsavarásához, ezért 0,1 rad/s szögsebességet határozok meg. A szimuláció lefuttatásához már csak a lépésköz és a stop kritériuma hiányzik. Előbbihez 0,1 s értéket állítok be, illetve, hogy minden lépést számítson ki és mentsen el a program, utóbbihoz pedig ki kell számolni, hogy mennyi idő alatt éri el a szerszám a 22,5 -os végpozícióját. Ezt átszámolva radiánba: π 22,5 = 0, Ezt pedig a szögsebességgel elosztva megkapjuk, hogy 3,927 s alatt éri el a végpozícióját. A stop kritériumot így 3,9 s-re állítom be és az első szimuláció alapján eldöntöm szükséges e egy nagyságrenddel nagyobb felbontással számítani a szimulációt és pontosabb stop kritériumot megadni. Miután a szimuláció lefutott a Post processor modulban ellenőrizhetjük a végeredményt. Lehetőségünk van az eredmény mintával történő kiosztására, így például azonnal ellenőrizhető, 32

33 hogy az alakítás során történik-e ütközés a tekercsek között. Ebben az esetben nem történ ütközés, ahogy az a 37. ábrán is látható. Lehetőség van a DEFORM szoftverből is kimenteni.stl formátumban a végeredményt. Ezt az NX-be beolvasva ott könnyedén elvégezhető az elméleti modell geometriájával történő összehasonlítás, a szomszédos tekercsekkel történő ütközésvizsgálat, illetve a tekercsfej magasságát is könnyen meg lehet mérni. 37. ábra K1 előgyártmány elcsavarás után Hogy legyen viszonyítási alapom mennyit változott az elcsavarás hatásásra a geometria Z irányú magassága, ezért először az előgyártmányt mértem meg, majd az alakítást elszenvedett geometriát is. Ezen felül érdekes lehet összevetni a csavarás előtti és a csavarás utáni radiális határméreteit a tekercsnek. Ezeket az 1. táblázatba gyűjtöttem össze. Drót magassága Belső radiális határméret Külső radiális határméret K1 csavarás előtt 10,66 mm 33,31 mm 37,57 mm K1 csavarás után 8,69 mm 33,08 mm 38,15 mm 1. táblázat - A K1 geometria befoglaló méretei Bár láthatóan nem érintkeznek az egymás mellett elhelyezkedő tekercsek egymással, NXben is ellenőriztem az alkatrészek ütközését. Mivel ebben az esetbe is negatív eredményt hozott 33
34 az ütközésvizsgálat, így folytatom az optimális előgyártmány keresését a következő geometria kipróbálásával A K2 előgyártmány geometria Ahhoz, hogy a Z irányú magasságát csökkenthessem a tekercs végformáján, már az előgyártmányt is meg kell próbáljam alacsonyabbra modellezni. Mindezt úgy szeretném elérni, hogy a korábban bemodellezett teoretikus végforma kiterített hosszától ne térjek el. Az előgyártmány hajlítási sugarának Rkh1=1,144 mm növelésével Rkh2=2 mm-re, sikerült elérnem kicsivel kevesebb, mint 0,55 mm magasság csökkenést, viszont ahogy az a 38. ábrán és a 2. táblázatban is látható ez az előgyártmány kiszélesedésével járt. A szimuláció paraméterei minden másban megegyeznek a K1 geometria esetén bemutatottal. Drót magassága Belső radiális határméret Külső radiális határméret K2 csavarás előtt 10,11 mm 32,48 mm 38,40 mm K2 csavarás után 8,20 mm 32,48 mm 38,15 mm 2. táblázat - A K2 előgyártmány befoglaló méretei 38. ábra - K2 előgyártmány fejrészének semleges hajlítási szála 34

35 A szimuláció lefutása után első körben itt is a post processor modulban tudom ellenőrizni a végeredményben kialakuló geometriát. Ez esetben is jól látszik a 39. ábrán, hogy a drótok kényelmesen elférnek egymás mellett, nem áll fenn annak a veszélye, hogy a csavarás közben összeütközzenek, vagy letesteljenek egymással. Megfigyelhető még, hogy a tekercsfej legmagasabb része kiszélesedett a K1 geometriához képest nagyjából ugyanakkora mértékben, mint, amennyivel az előgyártmányt is szélesebbre hagytam, illetve a külső láb a tekercs fejénél hasonló mértékben mozdult el radiális irányban, mint a K1 előgyártmány is. 39. ábra - K2 geometria az elcsavarás után Annak ellenére, hogy az előgyártmány 0,54 mm-rel lett alacsonyabb, mint a K1 geometria esetében, az alakítás után kialakult geometriák különbsége már csak 0,49 mm a Z tengely menti állórészből kilógó tekercsmagasságot tekintve. Mivel még rengeteg hely van a tekercsek között, így próbálok még lejjebb menni az előgyártmány magasságával A K3 előgyártmány geometria A K3 geometria esetében szintén megtartottam a tekercs kiterített hosszát és csak a magasságán csökkentettem (3. táblázat). Ezt a K2 előgyártmány esetében alkalmazott hajlítási sugár növelésével értem el. A K3 esetében az Rkh3=2,5 mm. A tekercs fejrészének a semleges szála továbbra is tükörszimmetrikus (lásd 40. ábra). A szimuláció során továbbra sem módosítottam a K1 esetében leírt paramétereken. 35
36 Drót magassága Belső radiális határméret Külső radiális határméret K3 csavarás előtt 9,71 mm 32,01 mm 38,93 mm K3 csavarás után 7,80 mm 31,92 mm 38,42 mm 3. táblázat - A K3 előgyártmány befoglaló méretei 40. ábra - K3 előgyártmány fejrészének semleges hajlítási szála A szimuláció végeredményét ellenőrizve továbbra is az látszik, hogy a drótok még igen távol helyezkednek el egymástól az alakítás után (lásd 41. ábra). A K2 geometriához képest mind az előgyártmány, mind pedig a végforma 0,4 mm-rel lett alacsonyabb. Továbbá elmondható, hogy a belső láb radiális helyzete az alakítás során továbbra sem változik számottevően, a külső láb pedig az első két változathoz hasonló mértékben mozdul el a középpont irányába. 36
37 41. ábra - A K3 geometria az elcsavarás után A K4 előgyártmány geometria A K4 geometriájának kialakítását szintén az előző két változatnál használt elvek szerint végeztem. A tekercs fejmagasságának a csökkentését, a hajlítási sugár újabb növelésével értem el, ami ebben az esetben Rkh4=3,098 mm (lásd 42. ábra). A drót kiterített hossza továbbra is változatlan és továbbra is tükörszimmetrikus a geometria vezérgörbéje. A szimuláció paraméterei megegyeznek a korábbiakkal. A geometria befoglaló méretei a 4. táblázatban olvashatóak. 42. ábra - K4 előgyártmány semleges hajlítási szála 37

38 Drót magassága Belső radiális határméret Külső radiális határméret K4 csavarás előtt 8,98 mm 31,42 mm 39,51 mm K4 csavarás után 7,34 mm 31,47 mm 38,99 mm 4. táblázat - A K4 előgyártmány befoglaló méretei 43. ábra - A K4 geometria az alakítás után az NX rendszerben a belső drótsor mellett A K4 szimulációja során alkalmazott geometriára a szakirodalmak klasszikusan Ω formaként hivatkoznak. Egyszerűsége miatt ez egy nagyon elterjedt geometria, viszont esetünkben nem, vagy csak nehezen lenne alkalmazható, mivel a tekercs feje az elcsavarás után, már jelentősen fölé lóg a belső sor drót külső lábának pozíciója fölé. Elképzelhető, hogy belső átmérőn elhelyezkedő tekercsek kialakíthatók lennének úgy, hogy elférjenek a fölé lógás ellenére is, viszont az állórész külső átmérőjének irányába még több hely van. A 43. ábrán jól látszik, hogy az előzetesen megalkotott elméleti belső geometriát is megérinti már a K4 tekercs. Viszont amennyiben a belső sor drót is Ω formájú előgyártmányból készülne már biztonsan nem férnének el egymástól. A továbbiakban ezért meghatároztam peremfeltételnek, hogy a két sor egymás mellett lévő lábai, azaz a külső drót belső lába, és a belső drót külső lába a Z tengellyel párhuzamosak legyenek. Az így felszabadulú anyagmennyiséget a külső drót esetében radiális irányban kifelé, a belső drót esetén pedig a középpont felé tolom majd el. 38
39 A K5 előgyártmány geometria A K5 előgyártmány geometriáját tehát a K4 Ω formájú tekercs szimulációja eredménye után hozott peremfeltétel figyelembe vételével készítettem el. A 44. ábrán látható, hogy a drót belső lábát függőlegesen hagytam, hogy zavartalanul elférhessen majd egymás mellett a külső és a belső sor drót. A tekercs kiterített hossza továbbra is megegyezik az eddigikkel. A fő célom ugyan a tekercs magasságának minimalizálása, ebben a lépésben most nem csökkentek az előgyártmány magasságán, csak eltolom a tekercsből felszabadult hosszt a külső átmérő felé. Az így kapott formára a szakirodalmak P formaként hivatkoznak. Ezt a fajta geometriát is gyakran alkalmazzák, mivel ez is könynen előállítható, illetve akkor is alkalmazható, ha több sorban el kell helyeznünk tekercseket az állórészben. Az előgyártmány méreteit az 5. táblázat tartalmazza. 44. ábra - K5 semleges hajlítási szála Drót magassága Belső radiális határméret Külső radiális határméret K5 csavarás előtt 9,02 mm 33,31 mm 40,85 mm K5 csavarás után 7,14 mm 32,96 mm 39,81 mm 5. táblázat - A K5 előgyártmány befoglaló méretei 39

40 A szimulációt továbbra is ugyanazokkal a beállításokkal futtattam le. A K5 elcsavarás utáni befoglaló méreteit megvizsgálva felfedezhető egy érdekesség. Ugyan a K4 előgyártmánya alacsonyabb volt, mégis a K5 geometriából kialakult tekercs feje lett alacsonyabb. Mivel a szimulációs paraméterek megegyeznek, és a két geometria előgyártmányai között, mindössze 0,04 mm magasságkülönbség volt, illetve a kiterített hosszuk is megegyezik, így kijelenthető, hogy jelen peremfeltételek mellett (drót átmérő, a drótlábak radiális helyzete, illetve az elcsavarás mértéke) a P formájú előgyártmányok alacsonyabb tekercsfejet fognak eredményezni. 45. ábra - K4 és K5 legmagasabb pontjának 'Z' tengely menti követése A 45. ábrán látható, a két geometria összehasonlítása a magasság változásának függvényében. Mindkét esetben az előgyártmány legmagasabb pontját választottam ki a követendőnek, ezek süllyedésének a lefutása látható a két grafikonon. A két görbe lefutása nagyon hasonló, a különbség abban mutatkozik, hogy hamarabb kezd el a K5 geometrián felvett pont süllyedni. 40

41 46. ábra - K4 és K5 geometriák alakítás közbeni összehasonlítása A 46. ábrán jól látszik, hogy 1,2 s eltelte után a K4 geometria fix lába még szinte teljesen függőleges helyzetben áll, míg a K5 esetében mindkét láb elkezdett dőlni. Az alakítás során történő elmozdulások alapján azt lehet megállapítani, hogy a belső fixen megfogott lábat a külső elcsavart láb radiális irányban kis mértékben húzza kifelé. Mivel a K4 geometriának a belső lábán is van egy hajlított ív, az a húzás hatására ki tud egyenesedni, míg a K5 előgyártmány egyenes belső lábának nincs ilyen tartaléka, az hamarabb kezd dőlni A K6 előgyártmány geometria Mivel a K5 geometria végformái közt még mindig viszonylag sok hely maradt, ezért tovább próbálom csökkenteni az előgyártmány és a végső forma magasságát. A szimuláció paramétereit továbbra is az fejezetben ismertettek szerint állítom be. A tekercs kiterített hosszán sem változtatok továbbra sem, így a magasság csökkentését a P forma hasának növelésével értem el, ahogy az a 47. ábrán is látható. Drót magassága Belső radiális határméret Külső radiális határméret K6 csavarás előtt 8,07 mm 33,31 mm 41,62 mm K6 csavarás után 6,66 mm 32,90 mm 40,44 mm 6. táblázat - A K6 előgyártmány befoglaló méretei 41
42 47. ábra - K6 előgyártmány fejrészének semleges hajlítási szála A szimuláció végeredményét visszaimportálva az NX CAD rendszerbe a következőre lettem figyelmes. Ahogy a 6. táblázat adataiból is jól látszik a tekercs fejének külső radiális mérete megnőtt, és így közel került az állórész külső átmérőjéhez. A tekercs geometriájának megtervezésekor azt az irányelvet szoktuk követni, hogy az állórész külső átmérőjétől legalább 1-1,5 mm távolságot kell tartani, ezzel biztosítva, hogy a ház, vagy a fedél nem tudja a drót szigetelését megsérteni. Ennél fogva ez a tekercs geometria nem használható, mert 0,51 mm távolságot eredményez az állórész külső palástjához képest. 48. ábra - A K6 geometria elcsavarás után 42
43 A 48. ábrán jól látszik, hogy az alakítás után még mindig lehetne alacsonyabb a tekercsek fejének magassága. A jelenlegi kiterített hossz megtartásával azonban nem lehetséges lejjebb menni, mivel sem a belső átmérő irányába, sem a külső átmérő irányába nem tudom a tekercs fejét a korábbi lépéseknél, vagy előzetesen meghatározott peremfeltételek miatt. A 45. ábrán megfigyelhető, hogy a tekercs két lábánál a Z irányú elmozdulás vektorok ellentétes irányúak a tekercs legmagasabb pontjának elmozdulásával. Tehát az alakítás során az eddig állandónak feltételezett kiterített hossz folyamatosan növekszik. Ezen túlmenően az általam elérni kívánt elméleti geometria, amit az NX rendszerben modelleztem, tartalmazhat magában tartalékokat A K7 előgyártmány geometria A K7 előgyártmány geometriáját az előző lépés eredménye alapján tehát a következőképpen alakítottam ki. A P forma magasságán nem csökkentettem, a K6-hoz képest, csupán a kiterített hosszát módosítottam 2mm-rel rövidebbre, 18,61 mm-re. Ezt a P hasának csökkentésével értem el úgy, hogy az egy körív mentén fusson végig, és távolabb kerüljön az állórész külső átmérőjétől. Ez a 49. ábrán is jól látható, illetve a 7. táblázatban feltüntetett méretekben is látható. 49. ábra - K7 előgyártmány semleges hajlítási szála Drót magassága Belső radiális határméret Külső radiális határméret K7 csavarás előtt 8,09 mm 33,31 mm 40,58 mm K7 csavarás után 6,04 mm 32,97 mm 39,49 mm 7. táblázat - A K7 előgyártmány befoglaló méretei 43
44 A végeredményből jól látszik, hogy bár az előgyártmány magasságán nem csökkentettem, csupán a kiterített hosszának változtatásával sikerült elérni 0,6 mm magasság csökkenést az alakítás utáni állapotban. A tekercsek kiosztása után viszont az is látszik, hogy még mindig van hely a tekercsek között (lásd 50. ábra). 50. ábra - K7 előgyártmány elcsavarás után A K8 előgyártmány geometria Mivel a K7 geometriával sem sikerült elérnem, hogy az alakított drótok szorosan egymás mellett fussanak, ezért a K8 előgyártmány geometriájának kialakítása során egyszerre két paramétert is megváltoztattam a K7-hez képest. Először is a magasságot csökkentettem 0,42 mmrel, illetve a korábbiakkal ellentétben nem tartottam meg az K7 kiterített hosszát, hanem azon is csökkentettem 18,61 mm-ről 16,61 mm-re. Egyrészt a magasság csökkentése is elvesz a kiterített hosszból, de ahogy az az 51. ábrán is látható, ezen túl még a P forma hasán is csökkentettem, hogy az előgyártmány külső radiális mérete is csökkenjen (lásd 8. táblázat). A szimuláció paraméterei változatlanok. 44
45 51. ábra - K8 előgyártmány semleges hajlítási szála Drót magassága Belső radiális határméret Külső radiális határméret K8 csavarás előtt 7,67 mm 33,31 mm 39,76 mm K8 csavarás után 5,38 mm 33,01 mm 38,68 mm 8. táblázat - A K8 előgyártmány befoglaló méretei Végeredményben ismét sikerült csökkenteni az alakítás utáni magasságon. Az 52. ábrán megfigyelhető, hogy a tekercs fejek közti hézag már jelentősen lecsökkent, de még mindig lehet közelíteni a drótokat egymáshoz. 45
 53.")
46 52. ábra - A K8 geometria elcsavarás után A K9 előgyártmány geometria A K9 geometria létrehozása során ugyanazt a módszert alkalmaztam, mint a K8 esetében. Csökkentettem az előgyártmány magasságát, külső radiális méretét, és ezáltal a kiterített hosszát is 16,62 mm-ről 14,20 mm-re redukáltam. (53. ábra) 53. ábra - A K9 előgyártmány semleges hajlítási szála 46

47 Drót magassága Belső radiális határméret Külső radiális határméret K9 csavarás előtt 6,87 mm 33,31 mm 39,13 mm K9 csavarás után 4,18 mm 33,00 mm 37,80 mm 9. táblázat - A K9 előgyártmány befoglaló méretei A 9. táblázatban szereplő értékeket megvizsgálva az látható, hogy ismét sikerült jelentősen csökkenteni a drótok fejmagasságán. A végeredményt viszont a post processor modulban kiosztva már látható, hogy az alakítás utána a drótok metszik egymást. Hogy pontosabb képet kapjak az ütközés mértékéről és helyzetéről az NX rendszerbe importálva az eredményt, a geometria metszeteit is vizsgálhatom. Az 54. ábrán egy a csavaró szerszám (illetve jelen képen az állórész) felett 2,8 mm magasságban készített metszeti képe látható a geometriának. A darabok egymásba való metszését a szoftver piros színnel emeli ki, így jól látható, hogy kis mértékben ugyan, de mindkét drótláb összeér a szomszédos tekercsekkel. A valóságban ilyen geometria nem alakulhat ki, mert már az alakítás vége előtt összeütköznek, és egymást fogják deformálni. Eközben felsérthetik egymáson a szigetelő réteget és rövidzárt is okozhatnak egymás közt, mert a tekercsfejek közé már nincs további szigetelés tervezve. 54. ábra - A K9 geometria elcsavarás után az állórész felső síklapjával párhuzamosan elmetszve 47
48 A K10 előgyártmány geometria Az eddigiekkel ellentétben a K10 geometria méreteit most nem csökkentettem a K9-hez képest, hanem ahogy az 55. ábrán és a 10. táblázatban látható, kicsit növeltem rajta. A K9 túl alacsony lett és az alakított geometrián mindkét drótláb összeütközött a szomszédos tekerccsel. Ahhoz, hogy ezt megakadályozzam megnöveltem az előgyártmány magasságát és a külső radiális méretét is. 55. ábra - A K10 előgyártmány semleges hajlítási szála Drót magassága Belső radiális határméret Külső radiális határméret K10 csavarás előtt 6,94 mm 33,31 mm 39,15 mm K10 csavarás után 4,27 mm 33,04 mm 37,96 mm 10. táblázat - A K10 előgyártmány befoglaló méretei Mivel tényleg csak minimális mértékben növeltem meg a geometria méreteit, így a szimuláció végeredménye sem különbözik sokban a K9 esetétől, mely az 54. ábrán látható. Hasonló mértékben metszenek egymásba a szomszédos drótlábak, szinte ugyanabban a 48
49 magasságban. A következő lépésben ezért egy nagyságrenddel nagyobb mértékben növelem meg majd a geometria méreteit A K11 előgyártmány geometria Az előző K10 geometria esetén csak néhány század mm-t növeltem a tekercs befoglaló méretein, és ez nem vezetett megfelelő eredményre. A K11 előgyártmány kialakításánál szintén nem nagy, de már tized mm-es nagyságrendű módosítással hoztam létre. (lásd 56. ábra) 56. ábra - A K11 előgyártmány semleges hajlítási szála Drót magassága Belső radiális határméret Külső radiális határméret K11 csavarás előtt 7,11 mm 33,31 mm 39,20 mm K11 csavarás után 4,52 mm 33,02 mm 38,08 mm 11. táblázat - A K11 előgyártmány befoglaló méretei 49

50 A szimuláció végeztével a DEFORM post processor moduljában nyitottam meg az adatbázist, hogy ellenőrizzem a számítás eredményét. A tekercs körkörös kiosztása után az 57. ábrán látható, hogy sikerült elérnem a kíván célt. A drótok érintkezés nélkül elférnek egymás mellett, ugyanakkor minimális hézag van csak közöttük. A tekercsfej pedig 4,52 mm magas lett (lásd 11. táblázat), így kijelenthető, hogy a beépítési magasság szempontjából a K11 geometria az optimális választás. 57. ábra - K11 geometria az elcsavarás után A K geometriák szimulációinak összefoglalása Tehát összesen 11 különböző geometriát vizsgáltam meg végeselemes szimulációs módszerrel. A vizsgálat célja a beépítési magasság minimalizálása volt. A szimuláció kinematikai modellje, az anyagmodell és az alakító szerszámok geometriája minden szimulációban azonosak voltak, csak és kizárólag a tekercs előgyártmány geometriáján változtattam, hogy az eredmények összevethetők legyenek egymással. Végeredményben a K11 geometriát találtam optimálisnak, a tekercsfej magassága szempontjából. Továbbá felhasználhatónak ítélem a K8 és K7 geometriákat, melyek magasabbak ugyan, de adott esetben elférhetnek a beépítési környezetben. Minden további általam vizsgált előgyártmány gyártási felhasználását elvetem, a tekercsfejek egymással való érintkezése, a belső sor tekercseivel való érintkezésnek a veszélye, a motor házával való érintkezés 50




51 lehetősége vagy a túl magas beépítési magasság miatt. A 12. táblázatban összefoglalva megtalálható mind a 11 geometria alakítás előtti és alakítás utáni állapota az alakítás során ébredő feszültségekkel ábrázolva, illetve a csavaráshoz szükséges nyomaték időbeli lefutásának grafikonja. Alakítás előtt Alakítás utáni feszültségi állapot Szükséges forgatónyomaték az alakításhoz K 1 σ'max=534 Mpa σ'min=0 Mpa K 2 σ'max=540 Mpa σ'min=0 Mpa K 3 σ'max=477 Mpa σ'min=0 Mpa 51



52 K 4 σ'max=539 Mpa σ'min=0 Mpa K 5 σ'max=492 Mpa σ'min=0 Mpa K 6 σ'max=472 Mpa σ'min=0 Mpa K 7 σ'max=555 Mpa σ'min=0 Mpa 52





53 K 8 σ'max=513 Mpa σ'min=0 Mpa K 9 σ'max=582 Mpa σ'min=0 Mpa K 1 0 σ'max=600 Mpa σ'min=0 Mpa K 1 1 σ'max=621 Mpa σ'min=0 Mpa 12. táblázat - A "K" geometriák szimulációinak összefoglaló táblázata 53
54 5.2. A belső átmérőn elhelyezkedő tekercsek szimulációi A geometria optimalizálására, mint a külső átmérőn elhelyezkedő tekercsek szimulációjának esetében is, ugyanazokkal a fő paraméterekkel futtattam le a szimulációkat. Az előgyártmány geometiáján kívül ebben az esetben sem változtattam semmilyen paraméteren. A szimuláció logikai felépítése szinte teljesen megegyezik a külső átmérőn ehelyezkedő drótok esetén már ismertetett szimulációkkal, így elsősorban csak a különbségeket fogom bemutatni a két szimuláció között. Mivel a belső tekercs lábainak a szögpozíciója, illetve az elcsavarásának mértéke megegyezik a külső tekercsével, ezért a kinematikai viszonyok, illetve a szimuláció lépésköze és stop kritériuma megegyezik a külső tekercs szimulációja során használtakkal (lásd ). A különbség az, hogy a szerszámok ebben az esetben kisebb sugáron helyezkednek el, és most a belső szerszámot fogom elcsavarni, a külsőt pedig fixnek hagyni (lásd 58. ábra). Tehát a belső szerszám lesz az elsődleges alakító szerszám. Minden más paraméter, a súrlódási viszonyok, anyagjellemzők stb. megegyeznek a külső drótok szimulációinak beállításaival. 58. ábra - A belső drótok szimulációjának összeállítása Mivel a B jelzésű tekercsek szimulációi nagyon hasonlóak a K drótokéhoz, ezért a B előgyártmány geometriák kialakítását a K előgyártmányok szimulációi során szerzett tapasztalatok alapján végeztem el. Ezek alapján pedig a B előgyártmányán alakoknál, csak a P formákat vizsgáltam, mivel a K4 szimulációja során kapott eredményekből azt a megállapítást 54
55 hoztam, hogy az Ω formák esetén fennál az elcsavart külső és belső tekercsek összeütközésének veszélye. Az ütközés elkerülésének érdekében, az előgyártmány külső lába vagy párhuzamos kell legyen a Z tengellyel, vagy csak a szerszám belső része felé dőlhet. A P forma hasának ebben az esetbe a szerszámba befelé kell néznie, és úgy kell megválasztani a méretét, hogy az elcsavarás utáni forma ne lógjon be az állórész belső átmérőjén belülre. Ellenkező esetben a forgórészt nem lehetne a forgórészt biztonságosan összeszerelni az állórésszel. Ezen felül a K5 geometria alacsonyabb fejmagasságot is eredményezett, mint az ugyanolyan kiterített hosszal rendelkező, és ugyanolyan magasságú előgyártmányú K A B1 előgyártmány geometria A K1 szimulációjához hasonlóan, ebben az esetben is az általam NX-ben létrehozott teoretikusan legalacsonyabb drótmodell kiterített hosszából indultam ki, a geometria méretei a 13. táblázatban és az 59. ábrán láthatóak. A korábbi K szimulációk során, a drótok lábainak kicsúszása, illetve az előzetes számításokat nélkülöző modellezéssel készített geometria tökéletlensége miatt jelentősen le tudtam csökkenteni az előgyártmány kiterített hosszát. Ettől függetlenül első lépésben még nem csökkentem az előgyártmány kiterített hosszát az elméleti modellemhez képest, mert ez alapján tudom megbecsülni milyen méret tartományokba essenek az első előgyártmányok geometriái. 59. ábra - A B1 előgyártmányának a semleges hajlítási szála 55

56 Drót magassága Belső radiális határméret Külső radiális határméret B1 csavarás előtt 8,93 mm 26,18 mm 33,00 mm B1 csavarás után 7,60 mm 26,35 mm 32,85 mm 13. táblázat - A B1 előgyártmány befoglaló méretei A szimuláció végeredményét megvizsgálva az 60.ábrán látható, hogy az alakítás után a tekercs fejrésze belóg az állórész belső átmérőjén belülre, így ez a geometria nem használható fel semmiképpen sem. 60. ábra - A B1 geometria elcsavarás utána az állórészbe illesztve A B2 előgyártmány geometria A B2 előgyártmány kialakításakor nem csak a magasságán csökkentettem az előgyártmánynak, hanem a P forma hasát is keskenyebbre vettem, hogy ne lógjon be az állórész belső átmérője fölé. A geometria méretei megfigyelhetők a 61. ábrán és a 14. táblázatban. Ezen változtatásoknak köszönhetően sikerült a fej geometria kiterített hosszát lerövidítenem 19,56 mmről, 16,76 mm-re. Drót magassága Belső radiális határméret Külső radiális határméret B2 csavarás előtt 7,86 mm 26,81 mm 33,00 mm B2 csavarás után 6,29 mm 27,01 mm 32,85 mm 14. táblázat - A B2 előgyártmány befoglaló méretei 56

57 61. ábra - B2 előgyártmányának a semleges hajlítási szála A szimuláció eredménye alapján ez a geometria már használható lenne a gyártáshoz, ugyanis a P forma elcsavarása után a tekercs belső radiális mérete 27,01 mm, azaz már nem lóg be az állórész belső átmérőjén belülre. Viszont a drótok kiosztását követően az is jól látszik, hogy még viszonylag nagy hézag található a tekercsfejek között (lásd 62. ábra), így tovább keresem még a magasság szempontjából optimális előgyártmány geometriát. 62. ábra - A B2 geometria elcsavarás után 57
58 A B3 előgyártmány geometria A B3 geometria megtervezésekor hasonlóan jártam el, mint a B2 esetében. Csökkentettem az előgyártmány magasságán, a P forma hasának méretén és ezáltal pedig a tekercs fej kiterített hosszán is (lásd 63. ábra). Az előgyártmány méretei megfigyelhetők a 15. táblázatban. 63. ábra - A B3 előgyártmány semleges hajlítási szála Drót magassága Belső radiális határméret Külső radiális határméret B3 csavarás előtt 6,86 mm 27,30 mm 33,00 mm B3 csavarás után 5,06 mm 27,53 mm 32,85 mm 15. táblázat A B3 előgyártmány befoglaló méretei A szimuláció végeredményét megvizsgálva azt láthatjuk (64. ábra), hogy egyenlőre sikerül a fej magasságát csökkenteni anélkül, hogy a szomszédos drótok összeütközésével kellene számolni. Mivel lehet még a magasságon csökkenteni egy keveset, ezért folytatom az előgyártmányokkal való kísérletezést az optimális eredmény megtalálásának érdekében. 58
, és ezáltal az előgyártmány fejforma kiterített hosszán is. (lásd 65.")
59 64. ábra - A B3 előgyártmány geometria az elcsavarás után A B4 előgyártmány geometria A B4 geometria kialakítása során szintén az eddig használt módszer segítségével változtattam a tekercsfej előgyártmányának alakján. Csökkentettem a drót magasságán, a P forma radiális irányú befoglaló méreteinek különbségén (lásd 16. táblázat), és ezáltal az előgyártmány fejforma kiterített hosszán is. (lásd 65. ábra) Drót magassága Belső radiális határméret Külső radiális határméret B4 csavarás előtt 6,74 mm 27,57 mm 33,00 mm B4 csavarás után 4,85 mm 27,80 mm 32,85 mm 16. táblázat - A B4 előgyártmány befoglaló méretei A 66. ábrán jól látszik, hogy már nincs túl sok hely a tekercsek között, de mivel még nem értem el továbbra sem azt a magasságot, ahol a tekercsek már összeütköznének, ezért folytatom tovább a P forma csökkentését, hogy még alacsonyabb fejmagasságot érhessek el. 59

60 65. ábra - A B4 előgyártmány semleges hajlítási szála 66. ábra - A B4 geometria az elcsavarás után 60
61 A B5 előgyártmány geometria A B5 esetében is az eddigiekkel megegyező módon próbáltam csökkenteni a tekercs méretein (67. ábra). Tovább csökkentettem a geometria fejmagasságát, a P forma hasának radiális irányú kiterjedését és ezáltal a drót kiterített hosszát is 13,66 mm-ről, 12,94 mm-re redukáltam. 67. ábra - A B5 előgyártmány semleges hajlítási szála Drót magassága Belső radiális határméret Külső radiális határméret B5 csavarás előtt 6,44 mm 27,73 mm 33,00 mm B5 csavarás után 4,38 mm 27,90 mm 32,85 mm 17. táblázat - A B5 előgyártmány befoglaló méretei A 17. táblázat adataiból jól látszik, hogy ismét sikerült egy jelentős 0,47 mm fejmagasság csökkenést elérni az előző előgyártmány végeredményéhez képest. Azonban a tekercseket körbe kiosztva látható, hogy ezek már nem férnek el egymás mellet, hanem összeütköznek. A 61

62 szomszédos tekercsek érintkezése a belső átmérőn lévő drótoknál sem megengedett, mivel a csavarás közben egymást deformálva nem tudna ez az alak kialakulni, ami a szimuláció során a tekercset egymagában alakítva kijött eredményül. A szomszédos drótok egymásba való metszésének mértéke 3 mm-rel a szerszám és állórész felső síkja fölött megfigyelhető pirossal jelölve a 68. ábrán. A B5 geometria ezért elvetendő és a gyártás során nem alkalmazható. 68. ábra - A B5 tekercsek metsződése az alakítás után A B6 előgyártmány geometria A B5 elvetése után a következő lépésben a B6 geometria kialakítása során a célom az volt, hogy az előgyártmány méreteit minimális mértékben megnövelve (lásd 18. táblázat), olyan tekercs geometriát kapjak végeredményül, amelyek már éppen nem érnek össze a szomszédos drótokkal. Mivel a szomszédos tekercsek közötti átfedés nem nagy, így tized milliméteres nagyságrendű változtatásokkal próbáltam meg a kívánt eredményt elérni, ez látható a 69. ábrán. A befoglaló méretek növelése, a kiterített hossz 12,93 mm-ről, 13,25 mm-re való növekedésével járt. 62
63 69. ábra - A B6 előgyártmány semleges hajlítási szála Drót magassága Belső radiális határméret Külső radiális határméret B6 csavarás előtt 6,54 mm 27,63 mm 33,00 mm B6 csavarás után 4,48 mm 27,85 mm 32,85 mm 18. táblázat - A B6 előgyártmány geometria befoglaló méretei A szimuláció elvégzése után a modellt ellenőrizve még mindig tapasztaltam kismértékű átfedést a szomszédos tekercsek között. Ez a 70. ábrán látható piros színnel jelölve. A módosítások tehát elvárásaim szerint befolyásolták a szimuláció végeredményét, viszont nem szüntette meg teljesen az átfedést, amit el szerettem volna kerülni. Emiatt a B6 előgyártmányt is el kell vessem, és tovább kell növeljek az előgyártmány geometrián, hogy a végső, optimális geometriát megtaláljam a tekercsfej magassága szempontjából. 63

64 70. ábra - A B6 tekercsek egymása metszésének mértéke az alakítás után A B7 előgyártmány geometria Mivel az előző B6 geometria megalkotása során alkalmazott geometriai változtatások már kis híján eredményre vezettek, ezért ugyanekkora mértékkel növelem meg a tekercsfej befoglaló méreteit, melyek a 19. táblázatban és a 71. ábrán láthatóak. Ennek köszönhetően a fejrész kiterített hossza is megnövekedett 13,47 mm-re. 71. ábra - A B7 előgyártmány semleges hajlítási szála 64

65 Drót magassága Belső radiális határméret Külső radiális határméret B7 csavarás előtt 6,64 mm 27,59 mm 33,00 mm B7 csavarás után 4,64 mm 27,80 mm 32,85 mm 19. táblázat - A B7 előgyártmány befoglaló méretei 72. ábra - A B7 előgyártmány elcsavarás után A 72. ábrán jól látszik, hogy a B7 geometria elcsavarás után már nem metsződnek egymásba a szomszédos tekercsek, és egészen minimális a hézag a drótok között. Ezek alapján kijelenthető, hogy a beépítési magasság szempontjából a B7 az optimális geometria A B geometriák szimulációinak összefoglalása Tehát összesen 7 különböző geometriát vizsgáltam meg végeselemes szimulációs módszerrel. A vizsgálat célja ebben az esetben is a beépítési magasság minimalizálása volt. A szimulációk során ebben az esetben is csak az előgyártmány geometriákon módosítottam. Végeredményben a B7 geometriát találtam optimálisnak, a tekercsfej beépítési magassága szempontjából. Továbbá felhasználhatónak ítélem a B3 és B4 geometriákat, melyek magasabbak ugyan, de adott esetben elférhetnek a beépítési környezetben. Minden további általam vizsgált 65



66 előgyártmány gyártási felhasználását elvetem, a tekercsfejek egymással való érintkezése, a forgórész beszerelésének ellehetetlenítése, vagy a túl magas beépítési magasság miatt. Az alábbi 20. táblázatban megtalálható mind a 7 geometria alakítás előtti és alakítás utáni állapota az alakítás során ébredő feszültségekkel ábrázolva, illetve a csavaráshoz szükséges nyomaték időbeli lefutásának grafikonja. Alakítás előtt Alakítás utáni feszültségi állapot Szükséges forgatónyomaték az alakításhoz B 1 σ'max=466 Mpa σ'min=0 Mpa B 2 σ'max=491 Mpa σ'min=0 Mpa B 3 σ'max=533 Mpa σ'min=0 Mpa 66





67 B 4 σ'max=567 Mpa σ'min=0 Mpa B 5 σ'max=591 Mpa σ'min=0 Mpa B 6 σ'max=562 Mpa σ'min=0 Mpa B 7 σ'max=600 Mpa σ'min=0 Mpa 20. táblázat - A "B" geometriák szimulációinak összefoglaló táblázata 67
TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI. 1. Bevezetés
 TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI Dr. Goda Tibor egyetemi docens Gép- és Terméktervezés Tanszék 1. Bevezetés 1.1. A végeselem módszer alapjai - diszkretizáció, - szerkezet felbontása kicsi szabályos elemekre
TERMÉKTERVEZÉS NUMERIKUS MÓDSZEREI Dr. Goda Tibor egyetemi docens Gép- és Terméktervezés Tanszék 1. Bevezetés 1.1. A végeselem módszer alapjai - diszkretizáció, - szerkezet felbontása kicsi szabályos elemekre
Ejtési teszt modellezése a tervezés fázisában
 Antal Dániel, doktorandusz, Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szabó Tamás, egyetemi docens, Ph.D., Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szilágyi Attila, egyetemi adjunktus,
Antal Dániel, doktorandusz, Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szabó Tamás, egyetemi docens, Ph.D., Miskolci Egyetem Robert Bosch Mechatronikai Tanszék Szilágyi Attila, egyetemi adjunktus,
KÉPLÉKENY ALAKÍTÁSI FOLYAMATOK SZÁMÍTÓGÉPES SZIMULÁCIÓJA
 FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA Kolozsvár, 2001. március 23-24. KÉPLÉKENY ALAKÍTÁSI FOLYAMATOK SZÁMÍTÓGÉPES SZIMULÁCIÓJA Computer simulation of plastic forming processes Horosz Gergő, Dr. Horváth
FIATAL MŰSZAKIAK TUDOMÁNYOS ÜLÉSSZAKA Kolozsvár, 2001. március 23-24. KÉPLÉKENY ALAKÍTÁSI FOLYAMATOK SZÁMÍTÓGÉPES SZIMULÁCIÓJA Computer simulation of plastic forming processes Horosz Gergő, Dr. Horváth
A SZAKMAI GYAKORLAT KÖVETELMÉNYEI
 A SZAKMAI GYAKORLAT KÖVETELMÉNYEI FELSŐFOKÚ RENDSZERGAZDA MÉRNÖKINFORMATIKUS-ASSZISZTENS FELSŐOKTATÁSI SZAKKÉPZÉSI SZAK Az akkreditált tanterv alapján a szakmai gyakorlat kredit- és időtartama: 30 kredit,
A SZAKMAI GYAKORLAT KÖVETELMÉNYEI FELSŐFOKÚ RENDSZERGAZDA MÉRNÖKINFORMATIKUS-ASSZISZTENS FELSŐOKTATÁSI SZAKKÉPZÉSI SZAK Az akkreditált tanterv alapján a szakmai gyakorlat kredit- és időtartama: 30 kredit,
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL
 SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
SZIMULÁCIÓ ÉS MODELLEZÉS AZ ANSYS ALKALMAZÁSÁVAL MAGYAR TUDOMÁNY NAPJA KONFERENCIA 2010 GÁBOR DÉNES FŐISKOLA CSUKA ANTAL TARTALOM A KÍSÉRLET ÉS MÉRÉS JELENTŐSÉGE A MÉRNÖKI GYAKORLATBAN, MECHANIKAI FESZÜLTSÉG
CAD-CAM-CAE Példatár
 CAD-CAM-CAE Példatár A példa megnevezése: A példa száma: A példa szintje: CAx rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: VEM Rúdszerkezet sajátfrekvenciája ÓE-A05 alap közepes haladó
CAD-CAM-CAE Példatár A példa megnevezése: A példa száma: A példa szintje: CAx rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: VEM Rúdszerkezet sajátfrekvenciája ÓE-A05 alap közepes haladó
Andó Mátyás Felületi érdesség matyi.misi.eu. Felületi érdesség. 1. ábra. Felületi érdességi jelek
 1. Felületi érdesség használata Felületi érdesség A műszaki rajzokon a geometria méretek tűrése mellett a felületeket is jellemzik. A felületek jellemzésére leginkább a felületi érdességet használják.
1. Felületi érdesség használata Felületi érdesség A műszaki rajzokon a geometria méretek tűrése mellett a felületeket is jellemzik. A felületek jellemzésére leginkább a felületi érdességet használják.
A végeselem módszer alapjai. 2. Alapvető elemtípusok
 A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
A végeselem módszer alapjai Előadás jegyzet Dr. Goda Tibor 2. Alapvető elemtípusok - A 3D-s szerkezeteket vagy szerkezeti elemeket gyakran egyszerűsített formában modellezzük rúd, gerenda, 2D-s elemek,
Fémtechnológiák Fémek képlékeny alakítása 1. Mechanikai alapfogalmak, anyagszerkezeti változások
 Miskolci Egyetem Műszaki Anyagtudományi Kar Anyagtudományi Intézet Fémtechnológiák Fémek képlékeny alakítása 1. Mechanikai alapfogalmak, anyagszerkezeti változások Dr.Krállics György krallics@eik.bme.hu
Miskolci Egyetem Műszaki Anyagtudományi Kar Anyagtudományi Intézet Fémtechnológiák Fémek képlékeny alakítása 1. Mechanikai alapfogalmak, anyagszerkezeti változások Dr.Krállics György krallics@eik.bme.hu
Lemezalkatrész modellezés. SolidEdge. alkatrészen
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A5 alap közepes - haladó SolidEdge CAD 3D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A5 alap közepes - haladó SolidEdge CAD 3D
CONSTEEL 8 ÚJDONSÁGOK
 CONSTEEL 8 ÚJDONSÁGOK Verzió 8.0 2013.11.20 www.consteelsoftware.com Tartalomjegyzék 1. Szerkezet modellezés... 2 1.1 Új szelvénykatalógusok... 2 1.2 Diafragma elem... 2 1.3 Merev test... 2 1.4 Rúdelemek
CONSTEEL 8 ÚJDONSÁGOK Verzió 8.0 2013.11.20 www.consteelsoftware.com Tartalomjegyzék 1. Szerkezet modellezés... 2 1.1 Új szelvénykatalógusok... 2 1.2 Diafragma elem... 2 1.3 Merev test... 2 1.4 Rúdelemek
FOGLALKOZÁSI TERV. A gyakorlati jegy megszerzésének feltétele: min. 51 pont elérése. Készítette: Ellenőrizte: Jóváhagyta:
 FOGLALKOZÁSI TERV NYÍREGYHÁZI FŐISKOLA MŰSZAKI ALAPOZÓ ÉS GÉPGYÁRTTECHN. TANSZÉK Szakirányú gyakorlat I. tantárgy 2010/2011. tanév, I. félév GM1B. III. évfolyam Gyak.jegy, kredit: 2 Tanítási hetek száma:
FOGLALKOZÁSI TERV NYÍREGYHÁZI FŐISKOLA MŰSZAKI ALAPOZÓ ÉS GÉPGYÁRTTECHN. TANSZÉK Szakirányú gyakorlat I. tantárgy 2010/2011. tanév, I. félév GM1B. III. évfolyam Gyak.jegy, kredit: 2 Tanítási hetek száma:
Az alakítással bevitt energia hatása az ausztenit átalakulási hőmérsékletére
 Az alakítással bevitt energia hatása az ausztenit átalakulási hőmérsékletére Csepeli Zsolt Bereczki Péter Kardos Ibolya Verő Balázs Workshop Miskolc, 2013.09.06. Előadás vázlata Bevezetés Vizsgálat célja,
Az alakítással bevitt energia hatása az ausztenit átalakulási hőmérsékletére Csepeli Zsolt Bereczki Péter Kardos Ibolya Verő Balázs Workshop Miskolc, 2013.09.06. Előadás vázlata Bevezetés Vizsgálat célja,
CAD-CAM-CAE Példatár
 CAD-CAM-CAE Példatár A példa megnevezése: A példa száma: A példa szintje: CAx rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: VEM befogott tartó ÓE-A15 alap közepes haladó CATIA V5 CAD,
CAD-CAM-CAE Példatár A példa megnevezése: A példa száma: A példa szintje: CAx rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: VEM befogott tartó ÓE-A15 alap közepes haladó CATIA V5 CAD,
Lemezalkatrész modellezés. SolidEdge. alkatrészen
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A2 alap közepes - haladó SolidEdge CAD 3D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A2 alap közepes - haladó SolidEdge CAD 3D
FÉLMEREV KAPCSOLATOK NUMERIKUS SZIMULÁCIÓJA
 FÉLMEREV KAPCSOLATOK NUMERIKUS SZIMULÁCIÓJA Vértes Katalin * - Iványi Miklós ** RÖVID KIVONAT Acélszerkezeti kapcsolatok jellemzőinek (szilárdság, merevség, elfordulási képesség) meghatározása lehetséges
FÉLMEREV KAPCSOLATOK NUMERIKUS SZIMULÁCIÓJA Vértes Katalin * - Iványi Miklós ** RÖVID KIVONAT Acélszerkezeti kapcsolatok jellemzőinek (szilárdság, merevség, elfordulási képesség) meghatározása lehetséges
Dr. Mikó Balázs
 Gyártórendszerek mechatronikája Termelési folyamatok II. 03 CAM rendszerek Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu miko.balazs@bgk.uni-obuda.hu 1 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai
Gyártórendszerek mechatronikája Termelési folyamatok II. 03 CAM rendszerek Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu miko.balazs@bgk.uni-obuda.hu 1 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai
ALAKÍTÓ TECHNOLÓGIÁK ELMÉLETE. Házi Feladat. Süllyesztékes kovácsolás
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM ANYAGTUDOMÁNY ÉS TECHNOLÓGIA TANSZÉK ALAKÍTÓ TECHNOLÓGIÁK ELMÉLETE Házi Feladat Süllyesztékes kovácsolás Teszt Tomi NEPTUN 2014. május 21. Licskó tanár úrnál
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM ANYAGTUDOMÁNY ÉS TECHNOLÓGIA TANSZÉK ALAKÍTÓ TECHNOLÓGIÁK ELMÉLETE Házi Feladat Süllyesztékes kovácsolás Teszt Tomi NEPTUN 2014. május 21. Licskó tanár úrnál
Diplomamunka, Szakdolgozat, Projekt munka, Komplex tervezés felépítésének tartalmi és formai követelményei
 Diplomamunka, Szakdolgozat, Projekt munka, Komplex tervezés felépítésének tartalmi és formai követelményei 1. Kötelezően leadandó Az Automatizálási és Infokommunikációs Intézet honlapján található tervezési
Diplomamunka, Szakdolgozat, Projekt munka, Komplex tervezés felépítésének tartalmi és formai követelményei 1. Kötelezően leadandó Az Automatizálási és Infokommunikációs Intézet honlapján található tervezési
(Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.
 Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja.") Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
Testmodellezés Testmodellezés (Solid modeling, Geometric modeling) Testmodell: egy létező vagy elképzelt objektum digitális reprezentációja. A tervezés (modellezés) során megadjuk a objektum geometria
Innocity Kft. terméktervezés, szerszámtervezés öntészeti szimuláció készítés + 3 6 / 7 0 / 4 2 1 8-407. w w w. i n n o c i t y.
 terméktervezés, szerszámtervezés öntészeti szimuláció készítés I n n o c i t y K u t a t á s i é s I n n o v á c i ó s T a n á c s a d ó K f t 2 6 0 0 V á c, P e t ő f i S á n d o r u. 5 5 / A + 3 6 /
terméktervezés, szerszámtervezés öntészeti szimuláció készítés I n n o c i t y K u t a t á s i é s I n n o v á c i ó s T a n á c s a d ó K f t 2 6 0 0 V á c, P e t ő f i S á n d o r u. 5 5 / A + 3 6 /
3 Technology Ltd Budapest, XI. Hengermalom 14 3/24 1117. Végeselem alkalmazások a tűzvédelmi tervezésben
 1117 Végeselem alkalmazások a tűzvédelmi tervezésben 1117 NASTRAN végeselem rendszer Általános végeselemes szoftver, ami azt jelenti, hogy nem specializálták, nincsenek kimondottam valamely terület számára
1117 Végeselem alkalmazások a tűzvédelmi tervezésben 1117 NASTRAN végeselem rendszer Általános végeselemes szoftver, ami azt jelenti, hogy nem specializálták, nincsenek kimondottam valamely terület számára
Lakóház tervezés ADT 3.3-al. Segédlet
 Lakóház tervezés ADT 3.3-al Segédlet A lakóház tervezési gyakorlathoz főleg a Tervezés és a Dokumentáció menüket fogjuk használni az AutoDesk Architectural Desktop programból. A program centiméterben dolgozik!!!
Lakóház tervezés ADT 3.3-al Segédlet A lakóház tervezési gyakorlathoz főleg a Tervezés és a Dokumentáció menüket fogjuk használni az AutoDesk Architectural Desktop programból. A program centiméterben dolgozik!!!
Lemezalkatrész modellezés. SolidEdge. alkatrészen
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A4 alap közepes - haladó SolidEdge CAD 3D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Lemezalkatrész modellezés SZIE-A4 alap közepes - haladó SolidEdge CAD 3D
XVII. econ Konferencia és ANSYS Felhasználói Találkozó
 XVII. econ Konferencia és ANSYS Felhasználói Találkozó Hazay Máté, Bakos Bernadett, Bojtár Imre hazay.mate@epito.bme.hu PhD hallgató Budapesti Műszaki és Gazdaságtudományi Egyetem Tartószerkezetek Mechanikája
XVII. econ Konferencia és ANSYS Felhasználói Találkozó Hazay Máté, Bakos Bernadett, Bojtár Imre hazay.mate@epito.bme.hu PhD hallgató Budapesti Műszaki és Gazdaságtudományi Egyetem Tartószerkezetek Mechanikája
Technikai áttekintés SimDay 2013. H. Tóth Zsolt FEA üzletág igazgató
 Technikai áttekintés SimDay 2013 H. Tóth Zsolt FEA üzletág igazgató Next Limit Technologies Alapítva 1998, Madrid Számítógépes grafika Tudományos- és mérnöki szimulációk Mottó: Innováció 2 Kihívás Technikai
Technikai áttekintés SimDay 2013 H. Tóth Zsolt FEA üzletág igazgató Next Limit Technologies Alapítva 1998, Madrid Számítógépes grafika Tudományos- és mérnöki szimulációk Mottó: Innováció 2 Kihívás Technikai
FRÖCCSÖNTÉS SZIMULÁCIÓ A SZERKEZETI ANALÍZIS SZOLGÁLATÁBAN
 Moldex3D I2 FRÖCCSÖNTÉS SZIMULÁCIÓ A SZERKEZETI ANALÍZIS SZOLGÁLATÁBAN Készítette: Polyvás Péter peter.polyvas@econengineering.com econengineering Kft. www.econengineering.com 2010.04.28. Moldex3D Vezető
Moldex3D I2 FRÖCCSÖNTÉS SZIMULÁCIÓ A SZERKEZETI ANALÍZIS SZOLGÁLATÁBAN Készítette: Polyvás Péter peter.polyvas@econengineering.com econengineering Kft. www.econengineering.com 2010.04.28. Moldex3D Vezető
KÉPLÉKENYALAKÍTÁS ELMÉLETI ALAPJAI
 KÉPLÉKENYALAKÍTÁS ELMÉLETI ALAPJAI ANYAGMÉRNÖK ALAPKÉPZÉS KÉPLÉKENYALAKÍTÁSI SZAKIRÁNY TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI ANYAGTUDOMÁNYI KAR FÉMTANI, KÉPLÉKENYALAKÍTÁSI ÉS NANOTECHNOLÓGIA
KÉPLÉKENYALAKÍTÁS ELMÉLETI ALAPJAI ANYAGMÉRNÖK ALAPKÉPZÉS KÉPLÉKENYALAKÍTÁSI SZAKIRÁNY TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI ANYAGTUDOMÁNYI KAR FÉMTANI, KÉPLÉKENYALAKÍTÁSI ÉS NANOTECHNOLÓGIA
KÉPLÉKENY HIDEGALAKÍTÁS
 KÉPLÉKENY HIDEGALAKÍTÁS ANYAGMÉRNÖK ALAPKÉPZÉS KÉPLÉKENYALAKÍTÁSI SZAKIRÁNY TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI ANYAGTUDOMÁNYI KAR ANYAGTUDOMÁNYI INTÉZET Miskolc, 2014. 1. TANTÁRGYLEÍRÁS
KÉPLÉKENY HIDEGALAKÍTÁS ANYAGMÉRNÖK ALAPKÉPZÉS KÉPLÉKENYALAKÍTÁSI SZAKIRÁNY TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI ANYAGTUDOMÁNYI KAR ANYAGTUDOMÁNYI INTÉZET Miskolc, 2014. 1. TANTÁRGYLEÍRÁS
CAD technikák Mérnöki módszerek gépészeti alkalmazása
 Mérnöki módszerek gépészeti alkalmazása XI. előadás 2008. április 28. MI A FEM/FEA? Véges elemeken alapuló elemzési modellezés (FEM - Finite Element Modeling) és elemzés (FEA - Finite Element Analysis).
Mérnöki módszerek gépészeti alkalmazása XI. előadás 2008. április 28. MI A FEM/FEA? Véges elemeken alapuló elemzési modellezés (FEM - Finite Element Modeling) és elemzés (FEA - Finite Element Analysis).
Hangfrekvenciás mechanikai rezgések vizsgálata
 KLASSZIKUS FIZIKA LABORATÓRIUM 3. MÉRÉS Hangfrekvenciás mechanikai rezgések vizsgálata Mérést végezte: Enyingi Vera Atala ENVSAAT.ELTE Mérés időpontja: 2011. november 23. Szerda délelőtti csoport 1. A
KLASSZIKUS FIZIKA LABORATÓRIUM 3. MÉRÉS Hangfrekvenciás mechanikai rezgések vizsgálata Mérést végezte: Enyingi Vera Atala ENVSAAT.ELTE Mérés időpontja: 2011. november 23. Szerda délelőtti csoport 1. A
KARAKTERFELISMERÉS AZ EVASYS-BEN
 KARAKTERFELISMERÉS AZ EVASYS-BEN HOL HASZNÁLHATÓ, KI HASZNÁLHATJA A Miskolci Egyetem megvásárolta a kézírásfelismerés (ICR) modult az Evasys legutóbbi licencével együtt. Ezzel lehetőség nyílt a papír alapú
KARAKTERFELISMERÉS AZ EVASYS-BEN HOL HASZNÁLHATÓ, KI HASZNÁLHATJA A Miskolci Egyetem megvásárolta a kézírásfelismerés (ICR) modult az Evasys legutóbbi licencével együtt. Ezzel lehetőség nyílt a papír alapú
ÁRAMKÖRÖK SZIMULÁCIÓJA
 ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
ÁRAMKÖRÖK SZIMULÁCIÓJA Az áramkörök szimulációja révén betekintést nyerünk azok működésébe. Meg tudjuk határozni az áramkörök válaszát különböző gerjesztésekre, különböző üzemmódokra. Végezhetők analóg
Csatlakozás a végeselem modulhoz SolidWorks-ben
 Csatlakozás a végeselem modulhoz SolidWorks-ben Meglévő alkatrész vagy összeállítás modellt ellenőrizhetünk különböző terhelési esetekben a CAD rendszer végeselem moduljával ( SolidWorks Simulation ).
Csatlakozás a végeselem modulhoz SolidWorks-ben Meglévő alkatrész vagy összeállítás modellt ellenőrizhetünk különböző terhelési esetekben a CAD rendszer végeselem moduljával ( SolidWorks Simulation ).
MÉRÉSI JEGYZŐKÖNYV. A mérés megnevezése: Potenciométerek, huzalellenállások és ellenállás-hőmérők felépítésének és működésének gyakorlati vizsgálata
 MÉRÉSI JEGYZŐKÖNYV A mérés megnevezése: Potenciométerek, huzalellenállások és ellenállás-hőmérők felépítésének és működésének gyakorlati vizsgálata A mérés helye: Irinyi János Szakközépiskola és Kollégium
MÉRÉSI JEGYZŐKÖNYV A mérés megnevezése: Potenciométerek, huzalellenállások és ellenállás-hőmérők felépítésének és működésének gyakorlati vizsgálata A mérés helye: Irinyi János Szakközépiskola és Kollégium
Termék modell. Definíció:
 Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
Definíció: Termék modell Összetett, többfunkciós, integrált modell (számítógépes reprezentáció) amely leír egy műszaki objektumot annak különböző életfázis szakaszaiban: tervezés, gyártás, szerelés, szervízelés,
KÖSZÖNTJÜK HALLGATÓINKAT!
 2010. november 10. KÖSZÖNTJÜK HALLGATÓINKAT! Önök Dr. Horváth Zoltán Módszerek, amelyek megváltoztatják a világot A számítógépes szimuláció és optimalizáció jelentősége c. előadását hallhatják! 1 Módszerek,
2010. november 10. KÖSZÖNTJÜK HALLGATÓINKAT! Önök Dr. Horváth Zoltán Módszerek, amelyek megváltoztatják a világot A számítógépes szimuláció és optimalizáció jelentősége c. előadását hallhatják! 1 Módszerek,
Példa: Tartó lehajlásfüggvényének meghatározása a Rayleigh Ritz-féle módszer segítségével
 Példa: Tartó lehajlásfüggvényének meghatározása a Rayleigh Ritz-féle módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 2013. szeptember 23. Javítva: 2013.10.09.
Példa: Tartó lehajlásfüggvényének meghatározása a Rayleigh Ritz-féle módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 2013. szeptember 23. Javítva: 2013.10.09.
SZAKDOLGOZAT VIRÁG DÁVID
 SZAKDOLGOZAT VIRÁG DÁVID 2010 Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Áramlástan Tanszék SZÁRNY KÖRÜLI TURBULENS ÁRAMLÁS NUMERIKUS SZIMULÁCIÓJA NYÍLT FORRÁSKÓDÚ SZOFTVERREL VIRÁG
SZAKDOLGOZAT VIRÁG DÁVID 2010 Budapesti Műszaki és Gazdaságtudományi Egyetem Gépészmérnöki Kar Áramlástan Tanszék SZÁRNY KÖRÜLI TURBULENS ÁRAMLÁS NUMERIKUS SZIMULÁCIÓJA NYÍLT FORRÁSKÓDÚ SZOFTVERREL VIRÁG
Szilárd testek rugalmassága
 Fizika villamosmérnököknek Szilárd testek rugalmassága Dr. Giczi Ferenc Széchenyi István Egyetem, Fizika és Kémia Tanszék Győr, Egyetem tér 1. 1 Deformálható testek (A merev test idealizált határeset.)
Fizika villamosmérnököknek Szilárd testek rugalmassága Dr. Giczi Ferenc Széchenyi István Egyetem, Fizika és Kémia Tanszék Győr, Egyetem tér 1. 1 Deformálható testek (A merev test idealizált határeset.)
Segédlet a Hengeres nyomó csavarrugó feladat kidolgozásához
 Segédlet a Hengeres nyomó csavarrugó feladat kidolgozásához A rugók olyan gépelemek, amelyek mechanikai energia felvételére, tárolására alkalmasak. A tárolt energiát, erő vagy nyomaték formájában képesek
Segédlet a Hengeres nyomó csavarrugó feladat kidolgozásához A rugók olyan gépelemek, amelyek mechanikai energia felvételére, tárolására alkalmasak. A tárolt energiát, erő vagy nyomaték formájában képesek
Kiválósági ösztöndíjjal támogatott kutatások az Építőmérnöki Karon c. előadóülés
 Kiválósági ösztöndíjjal támogatott kutatások az Építőmérnöki Karon c. előadóülés Hazay Máté hazay.mate@epito.bme.hu PhD hallgató Budapesti Műszaki és Gazdaságtudományi Egyetem Tartószerkezetek Mechanikája
Kiválósági ösztöndíjjal támogatott kutatások az Építőmérnöki Karon c. előadóülés Hazay Máté hazay.mate@epito.bme.hu PhD hallgató Budapesti Műszaki és Gazdaságtudományi Egyetem Tartószerkezetek Mechanikája
4. feladat Géprajz-Gépelemek (GEGET224B) c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára
 c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára") 4. feladat Géprajz-Gépelemek (GEGET4B) c. tárgyból a űszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára TOKOS TENGELYKAPCSOLÓ méretezése és szerkesztése útmutató segítségével 1. Villamos motorról
4. feladat Géprajz-Gépelemek (GEGET4B) c. tárgyból a űszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára TOKOS TENGELYKAPCSOLÓ méretezése és szerkesztése útmutató segítségével 1. Villamos motorról
Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével
 Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 213. október 8. Javítva: 213.1.13. Határozzuk
Példa: Tartó lehajlásfüggvényének meghatározása végeselemes módszer segítségével Készítette: Dr. Kossa Attila (kossa@mm.bme.hu) BME, Műszaki Mechanikai Tanszék 213. október 8. Javítva: 213.1.13. Határozzuk
Gyakorlati segédlet a tervezési feladathoz
 Nyugat-magyarországi Egyetem Faipari Mérnöki Kar Terméktervezési és Gyártástechnológiai Intézet Gyakorlati segédlet a tervezési feladathoz Mechanikai megmunkálás (OFM, FM BSC) és Ipari Technológiák II.
Nyugat-magyarországi Egyetem Faipari Mérnöki Kar Terméktervezési és Gyártástechnológiai Intézet Gyakorlati segédlet a tervezési feladathoz Mechanikai megmunkálás (OFM, FM BSC) és Ipari Technológiák II.
Összeállította Horváth László egyetemi tanár
 Óbudai Egyetem Neumann János Informatikai Kar Intelligens Mérnöki Rendszerek Intézet Intelligens Mérnöki Rendszerek Szakirány a Mérnök informatikus alapszakon Összeállította Horváth László Budapest, 2011
Óbudai Egyetem Neumann János Informatikai Kar Intelligens Mérnöki Rendszerek Intézet Intelligens Mérnöki Rendszerek Szakirány a Mérnök informatikus alapszakon Összeállította Horváth László Budapest, 2011
HELYI TANTERV. Mechanika
 HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
HELYI TANTERV Mechanika Bevezető A mechanika tantárgy tanításának célja, hogy fejlessze a tanulók logikai készségét, alapozza meg a szakmai tantárgyak feldolgozását. A tanulók tanulási folyamata fejlessze
FANUC Robotics Roboguide
 FANUC Robotics Roboguide 2010. február 9. Mi Mi az az a ROBOGUIDE Robot rendszer animációs eszköz ROBOGUIDE is an off-line eszköz a robot rendszer beállításához és karbantartásához ROBOGUIDE is an on-line
FANUC Robotics Roboguide 2010. február 9. Mi Mi az az a ROBOGUIDE Robot rendszer animációs eszköz ROBOGUIDE is an off-line eszköz a robot rendszer beállításához és karbantartásához ROBOGUIDE is an on-line
Projektfeladatok 2014, tavaszi félév
 Projektfeladatok 2014, tavaszi félév Gyakorlatok Félév menete: 1. gyakorlat: feladat kiválasztása 2-12. gyakorlat: konzultációs rendszeres beszámoló a munka aktuális állásáról (kötelező) 13-14. gyakorlat:
Projektfeladatok 2014, tavaszi félév Gyakorlatok Félév menete: 1. gyakorlat: feladat kiválasztása 2-12. gyakorlat: konzultációs rendszeres beszámoló a munka aktuális állásáról (kötelező) 13-14. gyakorlat:
A forgácsolás alapjai
 A forgácsolás alapjai Dr. Igaz Jenő: Forgácsoló megmunkálás II/1 1-43. oldal és 73-98. oldal FONTOS! KÉREM, NE FELEDJÉK, HOGY A PowerPoint ELŐADÁS VÁZLAT NEM HELYETTESÍTI, CSAK ÖSSZEFOGLALJA, HELYENKÉNT
A forgácsolás alapjai Dr. Igaz Jenő: Forgácsoló megmunkálás II/1 1-43. oldal és 73-98. oldal FONTOS! KÉREM, NE FELEDJÉK, HOGY A PowerPoint ELŐADÁS VÁZLAT NEM HELYETTESÍTI, CSAK ÖSSZEFOGLALJA, HELYENKÉNT
Cölöp függőleges teherbírásának és süllyedésének CPT alapú számítása
 15. számú mérnöki kézikönyv Frissítve: 2017. március Cölöp függőleges teherbírásának és süllyedésének CPT alapú számítása Program: Cölöp CPT Fájl: Demo_manual_15.gpn Ennek a mérnöki kézikönyvnek célja,
15. számú mérnöki kézikönyv Frissítve: 2017. március Cölöp függőleges teherbírásának és süllyedésének CPT alapú számítása Program: Cölöp CPT Fájl: Demo_manual_15.gpn Ennek a mérnöki kézikönyvnek célja,
2. Szimulációs Workshop
 Szoftvereszközök, legújabb fejlesztések a fém alakítástechnológia tervezés folyamatában 2. Szimulációs Workshop 2009. június 11. H. Tóth Zsolt FEA üzlatág igazgató VARINEX Informatikai Zrt. Szimuláció
Szoftvereszközök, legújabb fejlesztések a fém alakítástechnológia tervezés folyamatában 2. Szimulációs Workshop 2009. június 11. H. Tóth Zsolt FEA üzlatág igazgató VARINEX Informatikai Zrt. Szimuláció
Belsőégésű motor hengerfej geometriai érzékenység-vizsgálata Geometriai építőelemek változtatásának hatása a hengerfej szilárdsági viselkedésére
 Belsőégésű motor hengerfej geometriai érzékenység-vizsgálata Geometriai építőelemek változtatásának hatása a hengerfej szilárdsági viselkedésére Néhány példa a C3D Műszaki Tanácsadó Kft. korábbi munkáiból
Belsőégésű motor hengerfej geometriai érzékenység-vizsgálata Geometriai építőelemek változtatásának hatása a hengerfej szilárdsági viselkedésére Néhány példa a C3D Műszaki Tanácsadó Kft. korábbi munkáiból
Alumínium ötvözetek aszimmetrikus hengerlése
 A Miskolci Egyetemen működő tudományos képzési műhelyek összehangolt minőségi fejlesztése TÁMOP-4.2.2/B-10/1-2010-0008 Tehetségeket gondozunk! Alumínium ötvözetek aszimmetrikus hengerlése 2011. November
A Miskolci Egyetemen működő tudományos képzési műhelyek összehangolt minőségi fejlesztése TÁMOP-4.2.2/B-10/1-2010-0008 Tehetségeket gondozunk! Alumínium ötvözetek aszimmetrikus hengerlése 2011. November
CAD-CAM-CAE Példatár
 CAD-CAM-CAE Példatár A példa megnevezése: B07 NC program készítése A példa száma: ÓE-B07 A példa szintje: alap közepes haladó CAx rendszer: MTS TOPCAM Kapcsolódó TÁMOP tananyag rész: CAM A feladat rövid
CAD-CAM-CAE Példatár A példa megnevezése: B07 NC program készítése A példa száma: ÓE-B07 A példa szintje: alap közepes haladó CAx rendszer: MTS TOPCAM Kapcsolódó TÁMOP tananyag rész: CAM A feladat rövid
Geometria megadása DXF fájl importálásából
 30. sz. Mérnöki kézikönyv Frissítve: 2016. március Geometria megadása DXF fájl importálásából Program: GEO5 FEM GEO5 Fájl: Demo_manual_30.gmk DXF Fájlok: - model201.dxf eredeti fájl, amit bonyolultsága
30. sz. Mérnöki kézikönyv Frissítve: 2016. március Geometria megadása DXF fájl importálásából Program: GEO5 FEM GEO5 Fájl: Demo_manual_30.gmk DXF Fájlok: - model201.dxf eredeti fájl, amit bonyolultsága
Méretlánc átrendezés elmélete
 1. Méretlánc átrendezés elmélete Méretlánc átrendezés elmélete Egyes esetekben szükség lehet, hogy arra, hogy a méretláncot átrendezzük. Ezeknek legtöbbször az az oka, hogy a rajzon feltüntetett méretet
1. Méretlánc átrendezés elmélete Méretlánc átrendezés elmélete Egyes esetekben szükség lehet, hogy arra, hogy a méretláncot átrendezzük. Ezeknek legtöbbször az az oka, hogy a rajzon feltüntetett méretet
A DIPLOMAMUNKA FORMAI KÖVETELMÉNYEI JAVASLAT
 A DIPLOMAMUNKA FORMAI KÖVETELMÉNYEI JAVASLAT A diplomamunka kötelező részei (bekötési sorrendben) 1. Fedőlap - Bal felső sarokban a kiíró tanszék megnevezése (ha két tanszékkel együttműködve dolgozzuk
A DIPLOMAMUNKA FORMAI KÖVETELMÉNYEI JAVASLAT A diplomamunka kötelező részei (bekötési sorrendben) 1. Fedőlap - Bal felső sarokban a kiíró tanszék megnevezése (ha két tanszékkel együttműködve dolgozzuk
Hangfrekvenciás mechanikai rezgések vizsgálata
 Hangfrekvenciás mechanikai rezgések vizsgálata (Mérési jegyzőkönyv) Hagymási Imre 2007. május 7. (hétfő délelőtti csoport) 1. Bevezetés Ebben a mérésben a szilárdtestek rugalmas tulajdonságait vizsgáljuk
Hangfrekvenciás mechanikai rezgések vizsgálata (Mérési jegyzőkönyv) Hagymási Imre 2007. május 7. (hétfő délelőtti csoport) 1. Bevezetés Ebben a mérésben a szilárdtestek rugalmas tulajdonságait vizsgáljuk
3. feladat Géprajz-Gépelemek (GEGET224B) c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára
 c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára") 3. feladat Géprajz-Gépelemek (GEGET224B) c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára TENGELYVÉG CSAPÁGYAZÁSA, útmutató segítségével d. A táblázatban szereplő adatok alapján
3. feladat Géprajz-Gépelemek (GEGET224B) c. tárgyból a Műszaki Anyagtudományi Kar, nappali tagozatos hallgatói számára TENGELYVÉG CSAPÁGYAZÁSA, útmutató segítségével d. A táblázatban szereplő adatok alapján
Szabványok és számítási beállítások használata
 1. Számú mérnöki kézikönyv Frissítve: 2016. Február Szabványok és számítási beállítások használata Program: Súlytámfal Fájl: Demo_manual_01.gtz Ez a fejezet a Beállítás kezelő helyes használatát mutatja
1. Számú mérnöki kézikönyv Frissítve: 2016. Február Szabványok és számítási beállítások használata Program: Súlytámfal Fájl: Demo_manual_01.gtz Ez a fejezet a Beállítás kezelő helyes használatát mutatja
Regresszió számítás. Tartalomjegyzék: GeoEasy V2.05+ Geodéziai Kommunikációs Program
 Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
A forgácsolás alapjai
 NGB_AJ012_1 Forgácsoló megmunkálás (Forgácsolás és szerszámai) A forgácsolás alapjai Dr. Pintér József 2017. FONTOS! KÉREM, NE FELEDJÉK, HOGY A PowerPoint ELŐADÁS VÁZLAT NEM HELYETTESÍTI, CSAK ÖSSZEFOGLALJA,
NGB_AJ012_1 Forgácsoló megmunkálás (Forgácsolás és szerszámai) A forgácsolás alapjai Dr. Pintér József 2017. FONTOS! KÉREM, NE FELEDJÉK, HOGY A PowerPoint ELŐADÁS VÁZLAT NEM HELYETTESÍTI, CSAK ÖSSZEFOGLALJA,
CAD Rendszerek I. Sajátosság alapú tervezés - Szinkron modellezés
 CAD Rendszerek I. Sajátosság alapú tervezés - Szinkron modellezés Farkas Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék 1/ 14 Tartalom -Sajátosság alapú tervezés:
CAD Rendszerek I. Sajátosság alapú tervezés - Szinkron modellezés Farkas Zsolt Budapesti Műszaki és Gazdaságtudományi Egyetem, Gép- és Terméktervezés Tanszék 1/ 14 Tartalom -Sajátosság alapú tervezés:
MUNKAGÖDÖR TERVEZÉSE
 MUNKAGÖDÖR TERVEZÉSE Munkagödör tervezése Munkatérhatárolás szerkezetei Munkagödör méretezés Plaxis programmal Munkagödör méretezés Geo 5 programmal Tartalom Bevezetés VEM - geotechnikai alkalmazási területek
MUNKAGÖDÖR TERVEZÉSE Munkagödör tervezése Munkatérhatárolás szerkezetei Munkagödör méretezés Plaxis programmal Munkagödör méretezés Geo 5 programmal Tartalom Bevezetés VEM - geotechnikai alkalmazási területek
Rugalmas állandók mérése
 KLASSZIKUS FIZIKA LABORATÓRIUM 2. MÉRÉS Rugalmas állandók mérése Mérést végezte: Enyingi Vera Atala ENVSAAT.ELTE Mérés időpontja: 2011. november 16. Szerda délelőtti csoport 1. A mérés rövid leírása Mérésem
KLASSZIKUS FIZIKA LABORATÓRIUM 2. MÉRÉS Rugalmas állandók mérése Mérést végezte: Enyingi Vera Atala ENVSAAT.ELTE Mérés időpontja: 2011. november 16. Szerda délelőtti csoport 1. A mérés rövid leírása Mérésem
FORGÁCSNÉLKÜLI ALAKÍTÓ MŰVELETEK
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ MŰVELETEK ÁTTEKINTÉS Forgácsnélküli alakító műveletek csoportosítása Lemezalakító eljárások Anyagszétválasztó műveletek Lemez
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) FORGÁCSNÉLKÜLI ALAKÍTÓ MŰVELETEK ÁTTEKINTÉS Forgácsnélküli alakító műveletek csoportosítása Lemezalakító eljárások Anyagszétválasztó műveletek Lemez
VisualNastran4D. kinematikai vizsgálata, szimuláció
 A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
A példa megnevezése: A példa száma: A példa szintje: Modellezõ rendszer: Kapcsolódó TÁMOP tananyag rész: A feladat rövid leírása: Kardáncsukló mûködésének modellezése SZIE-K1 alap közepes - haladó VisualNastran4D
International GTE Conference MANUFACTURING 2012. 14-16 November, 2012 Budapest, Hungary. Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
 International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
International GTE Conference MANUFACTURING 2012 14-16 November, 2012 Budapest, Hungary MÉRŐGÉP FEJLESZTÉSE HENGERES MUNKADARABOK MÉRETELLENŐRZÉSÉRE Ákos György*, Bogár István**, Bánki Zsolt*, Báthor Miklós*,
Alkatrész modellezés SolidWorks-szel - ismétlés
 Alkatrész modellezés SolidWorks-szel - ismétlés Feladat: Készítse el az ábrán látható szenzorház geometriai modelljét a megadott lépések segítségével! (1. ábra) 1. ábra 1. Feladat 1. Vázlat készítés Készítsen
Alkatrész modellezés SolidWorks-szel - ismétlés Feladat: Készítse el az ábrán látható szenzorház geometriai modelljét a megadott lépések segítségével! (1. ábra) 1. ábra 1. Feladat 1. Vázlat készítés Készítsen
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép, ceruza, körző, vonalzó.
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 521 10 Szerszámkészítő Tájékoztató
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 521 10 Szerszámkészítő Tájékoztató
Akusztikai tervezés a geometriai akusztika módszereivel
 Akusztikai tervezés a geometriai akusztika módszereivel Fürjes Andor Tamás BME Híradástechnikai Tanszék Kép- és Hangtechnikai Laborcsoport, Rezgésakusztika Laboratórium 1 Tartalom A geometriai akusztika
Akusztikai tervezés a geometriai akusztika módszereivel Fürjes Andor Tamás BME Híradástechnikai Tanszék Kép- és Hangtechnikai Laborcsoport, Rezgésakusztika Laboratórium 1 Tartalom A geometriai akusztika
Legnagyobb anyagterjedelem feltétele
 Legnagyobb anyagterjedelem feltétele 1. Legnagyobb anyagterjedelem feltétele A legnagyobb anyagterjedelem feltétele (szabványban ilyen néven szerepel) vagy más néven a legnagyobb anyagterjedelem elve illesztett
Legnagyobb anyagterjedelem feltétele 1. Legnagyobb anyagterjedelem feltétele A legnagyobb anyagterjedelem feltétele (szabványban ilyen néven szerepel) vagy más néven a legnagyobb anyagterjedelem elve illesztett
Modern Fizika Labor. 2. Elemi töltés meghatározása
 Modern Fizika Labor Fizika BSC A mérés dátuma: 2011.09.27. A mérés száma és címe: 2. Elemi töltés meghatározása Értékelés: A beadás dátuma: 2011.10.11. A mérést végezte: Kalas György Benjámin Németh Gergely
Modern Fizika Labor Fizika BSC A mérés dátuma: 2011.09.27. A mérés száma és címe: 2. Elemi töltés meghatározása Értékelés: A beadás dátuma: 2011.10.11. A mérést végezte: Kalas György Benjámin Németh Gergely
Tevékenység: Tanulmányozza a ábrát és a levezetést! Tanulja meg a fajlagos nyúlás mértékének meghatározásának módját hajlításnál!
 Tanulmányozza a.3.6. ábrát és a levezetést! Tanulja meg a fajlagos nyúlás mértékének meghatározásának módját hajlításnál! Az alakváltozás mértéke hajlításnál Hajlításnál az alakváltozást mérnöki alakváltozási
Tanulmányozza a.3.6. ábrát és a levezetést! Tanulja meg a fajlagos nyúlás mértékének meghatározásának módját hajlításnál! Az alakváltozás mértéke hajlításnál Hajlításnál az alakváltozást mérnöki alakváltozási
DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK MŰSZAKI MECHANIKA II. HÁZIFELADAT
 DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK MŰSZAKI MECHANIKA II. HÁZIFELADAT 2013 Feladat: Adott az ábrán látható kéttámaszú tartó, amely melegen hengerelt I idomacélokból és melegen hengerelt
DEBRECENI EGYETEM MŰSZAKI KAR GÉPÉSZMÉRNÖKI TANSZÉK MŰSZAKI MECHANIKA II. HÁZIFELADAT 2013 Feladat: Adott az ábrán látható kéttámaszú tartó, amely melegen hengerelt I idomacélokból és melegen hengerelt
A MISKOLCI EGYETEM SZERVEZETI ÉS MŰKÖDÉSI SZABÁLYZAT III
 A MISKOLCI EGYETEM SZERVEZETI ÉS MŰKÖDÉSI SZABÁLYZAT III. KÖTET HALLGATÓI KÖVETELMÉNYRENDSZER A GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR HALLGATÓI KÖVETELMÉNYRENDSZERE SZABÁLYZAT A SZAKDOLGOZAT/DIPLOMATERV KÉSZÍTÉSÉRŐL
A MISKOLCI EGYETEM SZERVEZETI ÉS MŰKÖDÉSI SZABÁLYZAT III. KÖTET HALLGATÓI KÖVETELMÉNYRENDSZER A GÉPÉSZMÉRNÖKI ÉS INFORMATIKAI KAR HALLGATÓI KÖVETELMÉNYRENDSZERE SZABÁLYZAT A SZAKDOLGOZAT/DIPLOMATERV KÉSZÍTÉSÉRŐL
Autodesk Inventor Suite
 1 / 5 Autodesk Inventor Suite 2 / 5 Autodesk Inventor Suite Az Autodesk Inventor Suite egy olyan parametrikus tervező - modellező szoftver, melynek segítségével hatékonyan hozhatjuk létre alkatrészeink
1 / 5 Autodesk Inventor Suite 2 / 5 Autodesk Inventor Suite Az Autodesk Inventor Suite egy olyan parametrikus tervező - modellező szoftver, melynek segítségével hatékonyan hozhatjuk létre alkatrészeink
Gyors prototípus gyártás (Rapid Prototyping, RPT) 2009.11.09.
 2009.11.09.") Gyors prototípus gyártás (Rapid Prototyping, RPT) 2009.11.09. Konkurens (szimultán) tervezés: Alapötlet Részletterv Vázlat Prototípus Előzetes prototípus Bevizsgálás A prototípus készítés indoka: - formai
Gyors prototípus gyártás (Rapid Prototyping, RPT) 2009.11.09. Konkurens (szimultán) tervezés: Alapötlet Részletterv Vázlat Prototípus Előzetes prototípus Bevizsgálás A prototípus készítés indoka: - formai
Tervezés katalógusokkal kisfeladat
 BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes tervezés, méretezés és gyártás (BME KOJHM401) Tervezés katalógusokkal kisfeladat Járműelemek és Járműszerkezetanalízis Tanszék Ssz.:...... Név:.........................................
BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes tervezés, méretezés és gyártás (BME KOJHM401) Tervezés katalógusokkal kisfeladat Járműelemek és Járműszerkezetanalízis Tanszék Ssz.:...... Név:.........................................
CAD-ART Kft. 1117 Budapest, Fehérvári út 35.
 CAD-ART Kft. 1117 Budapest, Fehérvári út 35. Tel./fax: (36 1) 361-3540 email : cad-art@cad-art.hu http://www.cad-art.hu PEPS CNC Programozó Rendszer Oktatási Segédlet Laser megmunkálás PEPS 4 laser megmunkálási
CAD-ART Kft. 1117 Budapest, Fehérvári út 35. Tel./fax: (36 1) 361-3540 email : cad-art@cad-art.hu http://www.cad-art.hu PEPS CNC Programozó Rendszer Oktatási Segédlet Laser megmunkálás PEPS 4 laser megmunkálási
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
7. Koordináta méréstechnika
 7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
7. Koordináta méréstechnika Coordinate Measuring Machine: CMM, 3D-s mérőgép Egyiptomi piramis kövek mérése i.e. 1440 Egyiptomi mérővonalzó, Amenphotep fáraó (i.e. 1550) alkarjának hossza: 524mm A koordináta
Használható segédeszköz: szabványok, táblázatok, gépkönyvek, számológép, ceruza, körző, vonalzó.
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 521 10 Szerszámkészítő Tájékoztató
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 34 521 10 Szerszámkészítő Tájékoztató
Melegalakítás labor Melegalakítás labor. fajlagosan nagyobb szép felület,
 Melegalakítás labor 1. Az alakítási technológiák felosztása fémfizikai alapokon Hidegalakítás: Pl.: lemezalakítási technológiák (mélyhúzás, hajlítás ), redukálás, húzás, előre- v. hátrafolyatás, zömítés
Melegalakítás labor 1. Az alakítási technológiák felosztása fémfizikai alapokon Hidegalakítás: Pl.: lemezalakítási technológiák (mélyhúzás, hajlítás ), redukálás, húzás, előre- v. hátrafolyatás, zömítés
06A Furatok megmunkálása
 Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Gyártástechnológia II. BAGGT23NND/NLD 06A Furatok megmunkálása Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu
Óbudai Egyetem Bánki Donát Gépész és Biztonságtechnikai Mérnöki Kar Anyagtudományi és Gyártástechnológiai Intézet Gyártástechnológia II. BAGGT23NND/NLD 06A Furatok megmunkálása Dr. Mikó Balázs miko.balazs@bgk.uni-obuda.hu
Mágnesszelep analízise. IX. ANSYS felhasználói konferencia 2010 Előadja: Gráf Márton
 Mágnesszelep analízise MaxwellbenésSimplorerben IX. ANSYS felhasználói konferencia 2010 Előadja: Gráf Márton Diesel hidegindítás A hidegindítási rendszerek szerepe A dízelmotorokban az égés öngyulladás
Mágnesszelep analízise MaxwellbenésSimplorerben IX. ANSYS felhasználói konferencia 2010 Előadja: Gráf Márton Diesel hidegindítás A hidegindítási rendszerek szerepe A dízelmotorokban az égés öngyulladás
Végeselem módszer 7. gyakorlat
 SZÉCHENYI ISTVÁN EGYETEM ALKALMAZOTT MECHANIKA TANSZÉK Végeselem módszer 7. gyakorlat (kidolgozta: Szüle Veronika egyetemi ts.) Feladat: harang sajátrezgéseinek meghatározása 500 100 500 1000 250 250 1.
SZÉCHENYI ISTVÁN EGYETEM ALKALMAZOTT MECHANIKA TANSZÉK Végeselem módszer 7. gyakorlat (kidolgozta: Szüle Veronika egyetemi ts.) Feladat: harang sajátrezgéseinek meghatározása 500 100 500 1000 250 250 1.
Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel. Az objektumok áthaladnak a többi objektumon
 Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Bevezetés Ütközés detektálás Elengedhetetlen a játékokban, mozi produkciós eszközökben Nélküle kvantum hatás lép fel Az objektumok áthaladnak a többi objektumon A valósághű megjelenítés része Nem tisztán
Az elliptikus hengerre írt csavarvonalról
 1 Az elliptikus hengerre írt csavarvonalról Erről viszonylag ritkán olvashatunk, ezért most erről lesz szó. Az [ 1 ] munkában találtuk az alábbi részt 1. ábra. 1. ábra Itt a ( c ) feladat és annak megoldása
1 Az elliptikus hengerre írt csavarvonalról Erről viszonylag ritkán olvashatunk, ezért most erről lesz szó. Az [ 1 ] munkában találtuk az alábbi részt 1. ábra. 1. ábra Itt a ( c ) feladat és annak megoldása
2. Hangfrekvenciás mechanikai rezgések vizsgálata jegyzőkönyv. Zsigmond Anna Fizika Bsc II. Mérés dátuma: Leadás dátuma:
 2. Hangfrekvenciás mechanikai rezgések vizsgálata jegyzőkönyv Zsigmond Anna Fizika Bsc II. Mérés dátuma: 2008. 09. 24. Leadás dátuma: 2008. 10. 01. 1 1. Mérések ismertetése Az 1. ábrán látható összeállításban
2. Hangfrekvenciás mechanikai rezgések vizsgálata jegyzőkönyv Zsigmond Anna Fizika Bsc II. Mérés dátuma: 2008. 09. 24. Leadás dátuma: 2008. 10. 01. 1 1. Mérések ismertetése Az 1. ábrán látható összeállításban
HÍDTARTÓK ELLENÁLLÁSTÉNYEZŐJE
 HÍDTARTÓK ELLENÁLLÁSTÉNYEZŐJE Csécs Ákos * - Dr. Lajos Tamás ** RÖVID KIVONAT A Budapesti Műszaki és Gazdaságtudományi Egyetem Hidak és Szerkezetek Tanszéke megbízta a BME Áramlástan Tanszékét az M8-as
HÍDTARTÓK ELLENÁLLÁSTÉNYEZŐJE Csécs Ákos * - Dr. Lajos Tamás ** RÖVID KIVONAT A Budapesti Műszaki és Gazdaságtudományi Egyetem Hidak és Szerkezetek Tanszéke megbízta a BME Áramlástan Tanszékét az M8-as
A hatékony mérnöki tervezés eszközei és módszerei a gyakorlatban
 A hatékony mérnöki tervezés eszközei és módszerei a gyakorlatban Korszerű mérnöki technológiák (CAD, szimuláció, stb.) alkalmazásának bemutatása a készülékfejlesztés kapcsán Előadó: Szarka Zsolt H-TEC
A hatékony mérnöki tervezés eszközei és módszerei a gyakorlatban Korszerű mérnöki technológiák (CAD, szimuláció, stb.) alkalmazásának bemutatása a készülékfejlesztés kapcsán Előadó: Szarka Zsolt H-TEC
Használható segédeszköz: Függvénytáblázat, szöveges adatok tárolására és megjelenítésére nem alkalmas zsebszámológép
 A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus
A 27/2012 (VIII. 27.) NGM rendelet (12/2013 (III.28) NGM rendelet által módosított) szakmai és vizsgakövetelménye alapján. Szakképesítés, azonosító száma és megnevezése 54 523 04 Mechatronikai technikus
Áramlástechnikai rendszerek Stacionárius csőhálózat számítási feladatok szeptember BME Hidrodinamikai Rendszerek Tanszék
 Áramlástechnikai rendszerek Stacionárius csőhálózat számítási feladatok 2013. szeptember BME Hidrodinamikai Rendszerek Tanszék A hálózatszámítási feladat lépései: 1. A hálózat geometriájának és topológiájának
Áramlástechnikai rendszerek Stacionárius csőhálózat számítási feladatok 2013. szeptember BME Hidrodinamikai Rendszerek Tanszék A hálózatszámítási feladat lépései: 1. A hálózat geometriájának és topológiájának
Mérések állítható hajlásszögű lejtőn
 A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
A mérés célkitűzései: A lejtőn lévő testek egyensúlyának vizsgálata, erők komponensekre bontása. Eszközszükséglet: állítható hajlásszögű lejtő különböző fahasábok kiskocsi erőmérő 20 g-os súlyok 1. ábra
Végeselemes analízisen alapuló méretezési elvek az Eurocode 3 alapján. Dr. Dunai László egyetemi tanár BME, Hidak és Szerkezetek Tanszéke
 Végeselemes analízisen alapuló méretezési elvek az Eurocode 3 alapján Dr. Dunai László egyetemi tanár BME, Hidak és Szerkezetek Tanszéke 1 Tartalom Méretezési alapelvek Numerikus modellezés Analízis és
Végeselemes analízisen alapuló méretezési elvek az Eurocode 3 alapján Dr. Dunai László egyetemi tanár BME, Hidak és Szerkezetek Tanszéke 1 Tartalom Méretezési alapelvek Numerikus modellezés Analízis és
KÉPLÉKENYALAKÍTÁS ELMÉLET
 KÉPLÉKENYALAKÍTÁS ELMÉLET KOHÓMÉRNÖK MESTERKÉPZÉS KÉPLÉKENYALAKÍTÁSI SZAKIRÁNY TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI ANYAGTUDOMÁNYI KAR ANYAGTUDOMÁNYI INTÉZET Miskolc, 2008. 1. TANTÁRGYLEÍRÁS
KÉPLÉKENYALAKÍTÁS ELMÉLET KOHÓMÉRNÖK MESTERKÉPZÉS KÉPLÉKENYALAKÍTÁSI SZAKIRÁNY TANTÁRGYI KOMMUNIKÁCIÓS DOSSZIÉ MISKOLCI EGYETEM MŰSZAKI ANYAGTUDOMÁNYI KAR ANYAGTUDOMÁNYI INTÉZET Miskolc, 2008. 1. TANTÁRGYLEÍRÁS
A gyártási rendszerek áttekintése
 SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
SZÉCHENYI ISTVÁN EGYETEM GYŐR Gyártócellák (NGB_AJ018_1) A gyártási rendszerek áttekintése Bevezetés A tantárgy célja A gyártócellák c. tárgy átfogóan foglalkozik a gyártás automatizálás eszközeivel, ezen
Tevékenység: Olvassa el a bekezdést! Gyűjtse ki és tanulja meg a lemezalakító technológiák jellemzőit!
 Olvassa el a bekezdést! Gyűjtse ki és tanulja meg a lemezalakító technológiák jellemzőit! 2.1. Lemezalakító technológiák A lemezalakító technológiák az alkatrészgyártás nagyon jelentős területét képviselik
Olvassa el a bekezdést! Gyűjtse ki és tanulja meg a lemezalakító technológiák jellemzőit! 2.1. Lemezalakító technológiák A lemezalakító technológiák az alkatrészgyártás nagyon jelentős területét képviselik