Képfeldolgozás. Képi információk kinyerése Fényképek minőségének javítása
|
|
|
- Ildikó Soós
- 6 évvel ezelőtt
- Látták:
Átírás
1 Képfeldolgozás Képi információk kinyerése Fényképek minőségének javítása
2 . A Bitképek a programokban..net Bitképek a Bitmap.. A.Net... Image Class (managed C++)...Net Bitképek a Bitmap Class... Konstruktorok... Tulajdonságok...3 Metódusok...4 Bitképek módosítása a GetPixel() és SetPixel() lassú...5 Bitképek gyors módosítása...5. A bitkép adatainak rögzítése...5. A bitkép bitjeinek áttöltése a menedzselt és nem menedzselt memóriák közt Módosítás a nem menedzselt memóriában Visszatöltés a nem menedzselt memóriából a menedzselt memóriába A bitkép rögzítésének megszüntetése. Open CV Computer Vision library.. Az OpenCV telepítése... Az OpenCV a Visual Studio-ban.. Az OpenCV ablakozása..3 OpenCV Mat..3. Az OpenCV Mat osztály..3.. Konstruktorok..3.. Kifejezések (metódusok) Egyéb metódusok
3 ..4 Képek rögzítése. beolvasása, megjelenítése, kiírása..5 Video beolvasása a VideoCapture osztály..5. Konstruktorok..5. Metódusok..5.. Kamera olvasása..5.. Video file olvasása..6 Video file írása a VideoWriter osztály..6. Konstruktorok..6. Metódusok..6.3 Felvevő..7 A képtípus konvertálása..8 Színfényesség-hisztogramm..8. Színsíkok szétvágása..8. A hisztogramm(ok) számítása..8.3 A tömbök - hisztogramm(ok) normalizálása..9 Képhibák javítása..9. Konvolúció..9. Elmosás/Blur..9.3 Gauss-elmosás - GaussianBlur..9.4 Medián szűrés.. Élkeresés... A változás sebességének vizsgálata (Gradiens)... Sobel módszere... Élkeresés a változás gyorsulása alapján (Laplace)...3 Élkeresés a Canny módszerével 3
4 .. Képek élesítése... Csúszka... Élesítő konvolúció (filterd)...3 Éles kép=.5*kép-.5*blur(kép)...4 Zajcsökkentő élkiemelés.. Szegmentálás... Globális szegmentálás küszöbértékekkel ( )... Az Isodata algoritmus ( )... Otsu módszerének matematikai megfogalmazása ( )... Adaptív (lokális) szegmentálás küszöbértékekkel ( )... Küszöbérték lokális hisztogram alapján ( )...3 Részhalmazokra bontás fuzzy logikával ( )...4 Elárasztás ( )...4. Elárasztás statisztikával ( )...5 Szegmentálás tartományokkal ( )...5. Vágás és egyesítés...5. Csoportosítások Klaszterezés K-means algoritmus..3 Alakfelismerés..3. Alakfelismerés sablonillesztéssel..3. Alakfelismerés Hough transzformációval..3.. Egyenesek..3.. Körök..3.3 Előtér, háttér grabcut algoritmus 4
5 Képek információinak feldolgozása (3D). Pozíció-meghatározás síkban.. A sík-sík perspektíva bijekció. Kalibráció.3 Kontúrok keresése 3 A térlátás 3. Intrinsic paraméterek 3. Extrinsic paraméterek 3.3 Epipoláris geometria 5




,.")
 y( ) d b L( ) z( ) d λ")
6 . A Bitképek a programokban Képi adatok leírása Vektoros Raszteres Meta Színek, színmodellek CDR BMP, DIB, JPG True Type, WYSWYG, WMF, EMF -3 millió pálcika a világosság 5-7 millió csap a színes látás (érzékenyebb) A csapoknak érzékenységük szerint három csoportja van: L-, M- és S-típusú csapok (long, medium, short),. L - a fény intenzitása r L( ) x( ) d g L( ) y( ) d b L( ) z( ) d λ -Hullámhossz RedGreenBlue CyanMagentaYellow LightnessHueSaturance 6



7 Szín definíció fekete fehér (,) szürke árnyalat (..55) színes paletta index RGB RGBA HLS 7
 utal. RGB HSL.) r = R, g = G, b = B R max G max B max.")
 S = max min, egyébként + L 5.")
8 HLS-színmodell H a színárnyalatra (hue), L a fényességre (lightness), S pedig a telítettségre (saturation) utal. RGB HSL.) r = R, g = G, b = B R max G max B max.) min = min r, g, b, max = max(r, g, b) 3.) L = min+max, ha min = max, szürke kép 4.) S = max min, egyébként + L 5.) H =, ha min = max g b max min, ( + b r max min ), (4 + r g max min ), ha max = r ha max = g ha max = b 8
9 HSL RGB if (L <=.5) M = L *( + S); else M = L + S - L * S; M = * L - M; if (S == ) R = G = B = L ; // R,G,B else h = H + ; if (h > 36) h = h 36; if (h < 6) R = ( M + ( M - M ) * h / 6); // R else if (h < 8) R = M; // R else if (h < 4) R = M + ( M - M ) * ( 4 - h ) / 6; // R else R = M; // R h = H; if (h < 6) G = ( M + ( M - M ) * h / 6; // G else if (h < 8) G = M; // G else if (h < 4) G = M + ( M - M ) * ( 4 - h ) / 6; // G else G = M; // G h = H ; if (h < ) h += 36 if (h < 6) B = ( M + ( M - M ) * h / 6; // B else if (h < 8) B = M; // B else if (h < 4) B = M + ( M - M ) * ( 4 - h ) / 6; // B else B = M; // B 9
10 Képek tárolása fontosabb fájlformátumok BMP A memória formátum (DIB device independent). JPEG Veszteséges tömörítés, minőségromlás, az egyik legelterjedtebb (MPEG). GIF PNG Maximum 56 különféle színből álló kép, kihalóban (animált GIF). Egyesíti a JPEG és a GIF előnyeit. Készíthető vele GIF-szerű, kevés különböző színből álló kép, JPEG-hez hasonló akár 6 millió különböző színárnyalatot tartalmazó kép is, A kép tartalmazhat átlátszóságot biztosító ún. alfa csatornát is. RAW Nyers kép a fényképezőgépek saját az érzékelőből kiolvasott, adatokat minimálisan feldolgozott formában tartalmazó fájlformátuma.
11 . GIMP..Net Bitképek a Bitmap bitkép mérettel, formátummal Format6bppGrayScale Format4bppRgb Format3bppARgb Format64bppARgb Indexed - 6 bit per pixel árnyalat - 4(3-ből) bit per pixel nem_ használt_r_g_b - 3 bit per pixel alpha_r_g_b - 64 bit per pixel alpha_r_g_b - Színindex (paletta)
12 .. A.Net... Image Class (managed C++) Image absztrakt képtároló - ős System::Drawing::Bitmap raszteres System::Drawing::Imaging::MetaFile vektoros Tagfüggvények static int GetPixelFormatSize(PixelFormat pixfmt); return: A színmélység bitekben pixfmt: BitMap tulajdonság Gdi Alpha Format8bppIndexed GDI színkód (rgb) áttetszőség index, 8 bit/ (56) szín. static bool IsAlphaPixelFormat(PixelFormat pixfmt); áttetsző? static bool IsCanonicalPixelFormat( PixelFormat pixfmt); 3 bites? static bool IsExtendedPixelFormat(
13 ...Net Bitképek a Bitmap Class using namespace System::Drawing::Bitmap;... Konstruktorok Bitmap(String) Bitmap(String, Boolean) Az Image leszármazottja bitkép a file-ból (BMP, GIF, EXIF, JPG, PNG, TIFF lehet a kiterjesztés) bitkép a file-ból, van e színkorrekció Bitmap(Int3, Int3) bitkép mérettel Bitmap(Int3, Int3, PixelFormat) bitkép mérettel, formátummal, volt... Tulajdonságok Height - magasság HorizontalResolution- felbontás pixel/inch VerticalResolution - felbontás pixel/inch Width - szélesség PixelFormat - formátum...3 Metódusok Gdi Alpha FormatbppIndexed Format3bppRgbSpecifies a pixelekben GDI színek AlphaRGB bit per pixel és színindex 3 bit per pixel nem_ használt_r_g_b Color GetPixel(int x, int y) - pixel olvas void SetPixel(int x,int y,color Color) - pixel ír void Save(String ^, ImageFormat ) - Bmp, Emf, Exif, Gif, Guid, Icon, Jpeg, MemoryBmp, 3 Png, Tiff, Wmf
; // Set the PictureBox to display the image.")
14 private: System::Void beolvasástoolstripmenuitem_click( System::Object^ sender, System::EventArgs^ e) { try {// Az image. image = gcnew Bitmap( "C:\\Users\\Public\\Pictures\\Sample Pictures\\Desert.jpg", true); // Set the PictureBox to display the image. Szín korrekció picturebox->image = image; // A pixel format this->text = String::Format("Pixel format: {", image->pixelformat); pirostoolstripmenuitem->enabled = true; catch (ArgumentException^) { MessageBox::Show("Hiba.", "Ellenőrizd a file-t!"); 4
; int x, y; // Loop through the images pixels to reset color.")
15 ...4 Bitképek módosítása a GetPixel() és SetPixel() lassú 5 private: System::Void pirostoolstripmenuitem_click(system::object^ sender, System::EventArgs^ e) { try { // Retrieve the image. image = gcnew Bitmap( "C:\\Users\\Public\\Pictures\\Sample Pictures\\Desert.jpg", true); int x, y; // Loop through the images pixels to reset color. for (x = ; x < image->width; x++) { for (y = ; y < image->height; y++) { Color pixelcolor = image->getpixel(x, y); Color newcolor = Color::FromArgb(pixelColor.R,, ); image->setpixel(x, y, newcolor); // Set the PictureBox to display the image. picturebox->image = image; // Display the pixel format in Label. this->text = String::Format("Pixel format: {", image->pixelformat); catch (ArgumentException^) { MessageBox::Show("Hiba.", "Ellenőrizd a file-t!"); /
16 ...5 Bitképek gyors módosítása Bitkép rögzítése, adatainak kinyerése A bitkép bitjeinek áttöltése a nem menedzselt memóriába Módosítás, Visszatöltés nem menedzselt memóriából menedzselt memóriába A bitkép rögzítésének megszüntetése...5. A bitkép adatainak rögzítése BitmapData^ LockBits(Rectangle rect, ImageLockMode flags, PixelFormat format[, BitmapData^ bitmapdata]); rect - a bitkép rögzíteni kívánt része ImageLockMode - felsorolás ReadOnly, WriteOnly, ReadWrite, UserInputBuffer format - volt (Gdi,Alpha,Format8bppIndexed ) bitmapdata - adatok a BitmapData^ osztályba töltve BitmapData osztály Tulajdonságok: Height, Width, Stride Scan - a scanline szélessége, a - az első pixel címe. System::Drawing::Imaging::BitmapData^ bmpdata = image->lockbits(rect, System::Drawing::Imaging::ImageLockMode::ReadWrite, image->pixelformat); 6
17 ...5. A bitkép bitjeinek áttöltése a menedzselt és nem menedzselt memóriák közt System::Runtime::InteropServices::Marshal::Copy(ptr,Values,start,db); Nem menedzselt memóriából (ptr) a menedzselt memóriatömbbe (Values) start indextől db byte. IntPtr ptr = bmpdata->scan; int bytes = Math::Abs(bmpData->Stride) * image->height; // Memóriatömb a Bitmapnek array<byte>^values = gcnew array<byte>(bytes); // Átmásolás a memóriatömbbe System::Runtime::InteropServices::Marshal::Copy(ptr, Values,, bytes); Módosítás a menedzselt memóriatömbben (Values) Visszatöltés a menedzselt memóriából a nem menedzselt memóriába System::Runtime::InteropServices::Marshal::Copy(Values, start, ptr, db); A memória tömbből (Values) start indextől a memóriába(ptr) db byte. System::Runtime::InteropServices::Marshal::Copy(Values,, ptr, bytes); A bitkép rögzítésének megszüntetése void UnlockBits(BitmapData^ bitmapdata); 7
; // Rögzítés System::Drawing::Imaging::BitmapData^ bmpdata = image->lockbits( rect, System::Drawing::Imaging::ImageLockMode::ReadWrite, image->pixelformat);")
18 8 private: System::Void gyorstoolstripmenuitem_click(system::object^ sender, System::EventArgs^ e) { Graphics ^ g = this->creategraphics(); g->drawimage(image, Point(, )); Rectangle rect = Rectangle(,, image->width, image->height); // Rögzítés System::Drawing::Imaging::BitmapData^ bmpdata = image->lockbits( rect, System::Drawing::Imaging::ImageLockMode::ReadWrite, image->pixelformat); IntPtr ptr = bmpdata->scan; int bytes = Math::Abs(bmpData->Stride) * image->height; // Memóriatömb a Bitmapnek array<byte>^values = gcnew array<byte>(bytes); // Átmásolás a memóriatömbbe System::Runtime::InteropServices::Marshal::Copy(ptr, Values,, bytes); // Módosítás for (int counter = ; counter<values->length; counter++) { if (counter % 3!=) Values[counter] = ; // Visszamásolás a memóriatömbből System::Runtime::InteropServices::Marshal::Copy(Values,, ptr, bytes); // Felszabadítás image->unlockbits(bmpdata); g->drawimage(image, image->width, ); picturebox->image = image;
19 . Open CV Computer Vision library (Open Source Computer Vision Library) Gépi látást segítő, nyílt forráskódú függvénykönyvtár. BSD (Berkley Software Distribution) licencelt. Több, mint 5 optimalizált algoritmus képek adatainak feldolgozására, objektumok felismerésére azonosítására képeken, arc felismerésre, pirosszem eltávolításra, képek összekapcsolására a felbontás növelése céljából, 3D modellezésre, sztereo 3D látás segítésére, objektumok és a kamera mozgásának követésére, emberi gesztusok felismerésére videofelvételeken, kiterjesztett valóság modellezésére, Gépi tanulás támogatására. C++, C, Python, Java és MATLAB interfészek Windows, Linux, Android és Mac OS környezetben. MMX (multimédiás utasításkészlet), SSE (Intel továbbfejlesztés), CUDA és OpenCL grafikus 9 kártya.




20 .. Az OpenCV telepítése Pre-built libraries Libraries from source files... Az OpenCV a Visual Studio-ban View / Property Manager vagy Project / Properties A fordítónak az include állományok Függvények és struktúrák a linkernek Debug DLL - System Release
 #include \"stdafx.h\" #include <stdio.h> #include <opencv/opencv.")
21 .. Az OpenCV ablakozása void namedwindow(const string& winname, int flags=window_autosize ) WINDOW_NORMAL - átméretezhető WINDOW_AUTOSIZE - képhez igazít WINDOW_OPENGL - OpenGL támogatás. void destroywindow(const string& winname) #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { namedwindow("picture",window_normal); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; destroywindow("picture"); return ;
22 ..3 OpenCV Mat n dimenziós, többcsatornás (elemenként pl. pixelenként tárolt adatok száma) M i, i, i n i k < size[k] M egy lineáris n dimenziós tömb step[] azon bájtok száma, amelyet egy elem ugrás takar size[] a dimenziók határai addr M i, i, i n = addr M + +M. step i +M. step i + + +M. step n i n Pl: A3x3x3 byte tömb akkor step[] = 9, step[]=3, step[]= size[] = size[] = size[]=3
23 ..3. Az OpenCV Mat osztály class CV_EXPORTS Mat { public:... int dims; // dim >= int rows, cols; // (-, -) ha dimenziós uchar* data; // az adatok pointere int* refcount; // a referencia számláló;... //... Metódusok ;..3.. Konstruktorok Mat::Mat() - üres Mat::Mat(Size size, int type) - size méretű type tömb Mat::Mat(int sor, int oszl, int type) - sor*oszl- méretű D-s type tömb type - CV_<bitek száma>{u S FC{<csatornák> pl: uchar ~ CV_8UC 3-elemű float pontkoord ~ CV_3FC3 3
24 ..3.. Kifejezések (metódusok) A+B, A-B, -A, A*B A+s, A-s, s+a, s-a, A*alpha elemenkénti műveletek A.mul(B), A/B, alpha/a Transzponált A.t() Bitenkénti logikai operátorok A logicop B, A logicop s, s logicop A, ~A, ahol logicop : &,, ^ Matrix inverz különböző módszerekkel A.inv([módszer]) módszer : DECOMP_LU, DECOMP_CHOLESKY, DECOMP_SVD Elemenkénti minimum és maximum: min(a, B), min(a, alpha), max(a, B), max(a, alpha) Elemenkénti elérés: Az at<template>(koordináták) metódus a specifikált elemmel tér vissza template<typename _Tp > _Tp& cv::mat::at(int i = ) _Tp& cv::mat::at(int i, int i) _Tp& cv::mat::at(int i,int i,int i) Pl: Mat H(,,CV64F); for(int i = ; i < H.rows; i++) for(int j = ; j < H.cols; j++) H.at<double>(i,j)=./(i+j+); Egyéb metódusok void Mat::create(int sor, int oszlop, int type) void Mat::create(int ndims, const int* sizes, int type) Mat& Mat::operator=(const Mat& m) void Mat::copyTo(OutputArray m) int Mat::type() const 4
 CV_LOAD_IMAGE_GRAYSCALE Szürke árnyalat (=) void imshow(const string& winname, InputArray mat) Létrehozza az ablakot, ha nem létezik és megmutatja a paramétertömböt")
25 ..4 Képek beolvasása, megjelenítése, kiírása Mat imread(const string& filename, int flags= ) flags CV_LOAD_IMAGE_ANYDEPTH Ha az inputnak adott a mélysége, egyébként 8-bit (<). CV_LOAD_IMAGE_COLOR Színes (>) CV_LOAD_IMAGE_GRAYSCALE Szürke árnyalat (=) void imshow(const string& winname, InputArray mat) Létrehozza az ablakot, ha nem létezik és megmutatja a paramétertömböt bool imwrite(const string& filename, InputArray img, const vector<int>& params=vector<int>()) params típusfüggő tömörítési, minőségi előírások #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); imwrite("sivatag.jpg", kepbe); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; destroywindow("kep"); return ; 5
 { VideoCapture cap; cap.")
26 ..5 Video beolvasása a VideoCapture osztály..5. Konstruktorok VideoCapture() VideoCapture(const string& filename) VideoCapture(int device)..5. Metódusok bool open( int device) bool open( const string &filename) bool isopened() VideoCapture & operator >> (Mat & image) void release()..5.. Kamera olvasása #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { VideoCapture cap; cap.open(); // default kamera az első if (!cap.isopened()) { cerr << "Nem olvasható a video" << endl; return -; namedwindow("picture", WINDOW_NORMAL); Mat frame; for (;;) { cap >> frame; if (frame.empty()) continue; imshow("picture", frame); int c = waitkey(3); if (c == 'q' c == 'Q') break; cap.release(); v destroywindow("picture"); return ; v 6
 { namedwindow(\"picture\", WINDOW_NORMAL); VideoCapture v cap; // AVI video cap.")
27 ..5.. Video file olvasása #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { namedwindow("picture", WINDOW_NORMAL); VideoCapture v cap; // AVI video cap.open("c:\\users\\public\\videos\\samplevideos\\wildlife.wmv"); if (!cap.isopened()) { v cerr << "Nem olvasható a video" << endl; return -; Mat frame; for (;;) { try{ cap >> frame; imshow("picture", frame); //megmutatja a framet catch (...) { break; int c = waitkey(3); if (c == 'q' c == 'Q') break; cap.release(); destroywindow("picture"); return ; v v 7
28 ..6 Video file írása a VideoWriter osztály..6. Konstruktorok VideoWriter() VideoWriter(const string& filename, int fourcc, double fps, Size framesize, bool iscolor=true) CV_FOURCC('M', 'J', 'P', 'G') codec kód generátor..6. Metódusok bool open(const string& filename, int fourcc, double fps, Size framesize, bool iscolor=true) bool isopened() VideoWriter& VideoWriter::operator<<(const Mat& image)..6.3 Felvevő #include "stdafx.h" #include <opencv/opencv.hpp> #include <iostream> using namespace cv; using namespace std; int main(int, char**) { namedwindow("picture", WINDOW_NORMAL); Mat src; VideoCapture cap(); // a default kamera a forrás if (!cap.isopened()) { cerr << "Nem olvasható a video\n"; return -; cap >> src; if (src.empty()) { cerr << "Nem sikerült a felvétel\n"; return -; 8

29 bool iscolor = (src.type() == CV_8UC3); VideoWriter v writer;//videowriter int codec = CV_FOURCC('M', v'j', 'P', 'G'); // 4 karakteres codec kód MJPG double fps = 5.; // a framerate string filename = "./live.avi"; writer.open(filename, codec, v fps, src.size(), iscolor); if (!writer.isopened()) v { // ha nem sikerült cerr << "Nem lehet kiírni\n"; return -; cout << "A videofile " << filename << endl; for (;;) //--- A GRAB és kiírás { try { cap >> src; catch (...){ break; v writer << src; imshow("picture", src); int c = waitkey(3); if (c == 'q' c == 'Q') break; // Dokumentumok mappa a Powerpointból destroywindow("picture"); // a videofile automatkusan zár a VideoWriter destructorral return ; 9

30 ..7 A képtípus konvertálása void cvtcolor(inputarray src, OutputArray dst, int code, int dstcn= ) src input: 8-bit unsigned/ 6-bit unsigned ( CV_6UC... )/ single floating-point. dst output ugyanolyan méretű mint src. code konverzió CV_BGRGRAY, CV_RGBGRAY, CV_GRAYBGR, CV_GRAYRGB, CV_BGRHLS, CV_RGBHLS, CV_HLSBGR, CV_HLSRGB, CV_BGRHSV, CV_RGBHSV, CV_HSVBGR, CV_HSVRGB dstcn a csatornák száma, ha, akkor az input definiál #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { VideoCapture cap; cap.open(); // default kamera az első if (!cap.isopened()) { std::cerr << "Nem olvasható a video" << std::endl; return -; Mat frame, gray; for (;;) { cap >> frame; if (frame.empty()) continue; cvtcolor(frame, gray, COLOR_BGRGRAY); return ; v imshow("picture", frame); imshow("gray", gray); int c = waitkey(3); if (c == 'q' c == 'Q') break; 3
 A többcsatornás tömböket csatornánlkénti tömbökre vágja src - a forrás matrix mv - a síkok tömbje vector<mat> bgr_planes; // a három színsík ( B, G")
 számítása void calchist(const Mat* images, int nimages, const int* channels, InputArray mask, OutputArray hist, int dims, const int* histsize, const float** ranges, bool")
31 ..8 Színfényesség-hisztogramm Windows Dockable Dialogs Histogram / Ablakok Dokkolható párbeszédablakok Hisztogramm Colors Information Histogram / Színek Információ Hisztogramm..8. Színsíkok szétvágása void split(const Mat& src, Mat* mvbegin) A többcsatornás tömböket csatornánlkénti tömbökre vágja src - a forrás matrix mv - a síkok tömbje vector<mat> bgr_planes; // a három színsík ( B, G and R ) split(src, bgr_planes); v..8. A hisztogramm(ok) számítása void calchist(const Mat* images, int nimages, const int* channels, InputArray mask, OutputArray hist, int dims, const int* histsize, const float** ranges, bool uniform=true, bool accumulate=false ) db% L images - A képek (azonos méretű és mélységű MAT-ok, ha több); nimages - A képek száma; channels - A csatornák listája (-images[i].chanels); mask - Opcionális maszk. Ha nem üres MAT, akkor ua. méret, csak a nem elemek számítanak, hist - Az output hisztogramok; dims - Az outputok darabszáma; histsize - A hisztogram(ok) vizsz. mérete; ranges - A hisztogram(ok) függ felbontása; uniform - Minden számított hisztogram azonos range méretű-e; accumulate- Egyszerre több összegzése. 3
32 ..8.3 A tömbök - hisztogramm(ok) normalizálása void normalize(inputarray src, OutputArray dst, double alpha=, double beta=, int norm_type=norm_l, int dtype=-, InputArray mask=noarray() ) src Az input tömb; dst Az output tömb (azonos méretű). alpha A max érték amire normalizál, vagy az alsó határ (normtype=norm_minmax esetén); beta A felső határ (normtype=norm_minmax esetén); normtype A norma típusa (NORM_INF maximum n. NORM_L abs osszeg, NORM_L Euclidesi n), vagy NORM_MINMAX. dtype Ha negatív, akkor az src és a dst azonos típusú, egyébként azonos számú csatorna és CV_MAT_DEPTH mélység; mask optional operation mask. #include "stdafx.h" #include "opencv/highgui/highgui.hpp" #include "opencv/imgproc/imgproc.hpp" #include <iostream> #include <stdio.h> using namespace std; using namespace cv; int main(int argc, char** argv) { Mat src, gray, dst; src = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("sivatag", src); vector<mat> bgr_planes; // a három színsík ( B, G and R ) split(src, bgr_planes); v cvtcolor(src, gray, COLOR_BGRGRAY);// a szürkeárnyalat 3
33 int histsize = 8; float range[] = {, 56 ; const float* histrange = { range ; // A histogram mérete // A szintek // A szintek tömb Mat gray_hist, b_hist, g_hist, r_hist; /// hisztogram számítás: sík, db, csatorna, maszk, out, outdim, vizszmeret, függ meret calchist(&gray,,, Mat(), gray_hist,, &histsize, &histrange); calchist(&bgr_planes[],,, Mat(), b_hist,, &histsize, &histrange); calchist(&bgr_planes[],,, Mat(), v g_hist,, &histsize, &histrange); calchist(&bgr_planes[],,, Mat(), r_hist,, &histsize, &histrange); // Kirajzolás előkészítés int hist_w = 5; int hist_h = 4; int bin_w = cvround((double)hist_w / histsize); Mat histimage(hist_h, hist_w, CV_8UC3, Scalar(,, )); // Normalizál: in, out, alsoh, felsoh, mód, uatip, nincs maszk normalize(gray_hist, gray_hist,, histimage.rows, NORM_MINMAX, -, Mat()); normalize(b_hist, b_hist,, histimage.rows, NORM_MINMAX, -, Mat()); normalize(g_hist, g_hist,, histimage.rows, v NORM_MINMAX, -, Mat()); normalize(r_hist, r_hist,, histimage.rows, NORM_MINMAX, -, Mat()); // Kirajzolás for (int i = ; i < histsize; i++) { // Vonal : img, tól, ig, szín, vastagság, vonaltípus, eltolás line(histimage, Point(bin_w*(i - ), hist_h - cvround(gray_hist.at<float>(i - ))),Point(bin_w*(i), hist_h - cvround(gray_hist.at<float>(i))), Scalar(7, v 7, 7),, 8, ); line(histimage, Point(bin_w*(i - ), hist_h - cvround(b_hist.at<float>(i - ))), Point(bin_w*(i), hist_h - cvround(b_hist.at<float>(i))), Scalar(55, v, ),, 8, ); line(histimage, Point(bin_w*(i - ), hist_h - cvround(g_hist.at<float>(i - ))), Point(bin_w*(i), hist_h - cvround(g_hist.at<float>(i))), Scalar(, v 55, ),, 8, ); line(histimage, Point(bin_w*(i - ), hist_h - cvround(r_hist.at<float>(i - ))), Point(bin_w*(i), imshow("calchist", histimage); waitkey(); return ; hist_h - cvround(r_hist.at<float>(i))), Scalar(,, 55),, 8, ); v 33
, rendszerint páratlan számú sort és oszlopot tartalmaz void filterd(inputarray src, OutputArray dst, int ddepth, InputArray kernel, Point anchor=point(-,-),")
34 ..9 Képhibák javítása..9. Konvolúció A képpont és környezete világosságának súlyozott összege R q ( k, l) t g( k, l) t( r, s) g( k r, l s) S rrss g - a képpont eredeti világossága q - a képpont új világossága t - a súlyok (az operator), rendszerint páratlan számú sort és oszlopot tartalmaz void filterd(inputarray src, OutputArray dst, int ddepth, InputArray kernel, Point anchor=point(-,-), double delta=, int bordertype=border_default ) src Az input; dst Az output azonos méret és azonos csatorna; ddepth A kívánt output adatmélység (hány bites). Ha -, akkor az input a meghatározó; kernel A konvolúciós mátrix. anchor A célpont helye a konvolúciós mátrixban. A (-,-) a középpont; delta Opcionális hozzáadott érték a pixelekhez; bordertype Extrapoláció a határon, extrapoláció a default. Szűrők Általános Konvolúciós mátrix / Filters Generics Convolution Matrix 34
35 #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat kern = Mat::zeros(3, 3, CV_8S); kern.at<char>(, ) = -; kern.at<char>(, ) = -; kern.at<char>(, ) = -; kern.at<char>(, ) = -; kern.at<char>(, ) = 5; Mat kepki; // Konvolúció: in, out, inmélysége, konvmatrix filterd(kepbe, vkepki, -, kern); imshow("fdkep", kepki); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 35
36 ..9. Elmosás/Blur A képpont és környezete világosságának átlaga - lágyít Filters Blur Blur / Szűrők Elmosás Elmosás K = ksize. width ksize. height void blur(inputarray src,outputarray dst,size ksize,point anchor=point(-,-),int bordertype=border_default) src Az input (bárhány csatorna); dst Az output ugyanakkora, mint az src; ksize A kernel mérete; anchor A kernel kezdőpontja, a default (-,-) a középpont; bordertype A képen kívül az extrapoláció a default. #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat kepki; blur(kepbe, kepki, v Size(9,9)); imshow("blur", kepki); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 36

37 ..9.3 Gauss-elmosás / Gaussian Blur Filters Blur Gaussian Blur / Szűrők Elmosás Gauss-elmosás Minden (vagy a kiválasztott) pixel(ek) helyére beállítható méretű környezet súlyozott átlaga kerül lágyít Többször használható - Ctrl F IIR - infinite impulse response nem számítógépes ábrák, nagy környezet. RLE - run-length encoding. Számítógépes ábra nagy egyszínű részekkel.
38 A normális eloszlás haranggörbéje Két dimenzióban a magfüggvény x σ σ π e G x, y = Ke x σ y σ σ a szórás, a várható érték void GaussianBlur(InputArray src, OutputArray dst, Size ksize, double sigmax, double sigmay=, int bordertype=border_default ) src Az input (bárhány csatorna); dst Az output ugyanakkora, mint az src. ksize A méret; sigmax Az x irányú szórás; sigmay Az y irányú szórás (ha, akkor ua, mint sigmax); bordertype A képen kívül az extrapoláció. #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat kepki; GaussianBlur(kepbe, vkepki, Size(9, 9),3); imshow("gaussblur", kepki); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 38
39 ..9.4 Medián szűrés Egypontos hibákra jó, nem lineáris. void medianblur(inputarray src, OutputArray dst, int ksize) src Az input -, 3-, or 4 csatorna; dst Az output ugyanaz a méret mnt az src; ksize A méret>, páratlan. #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat kepki; medianblur(kepbe, v kepki, 9); imshow("medianblur", kepki); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 39
40 Blur GaussBlur MedianBlur 4
 Vízszintes és függőleges irányú változásokat parciális differencia képzésével")
, ( ), ( ), ( l k g l k g x g l k d ), ( ), ( ), ( l k g l k g y g l k d, r r arctg r r Gr Élkeresés differencia kereséssel")
41 4.. Élkeresés... A változás sebességének vizsgálata (Gradiens) Vízszintes és függőleges irányú változásokat parciális differencia képzésével emelhetjük ki. ), ( ), ( ), ( l k g l k g x g l k d ), ( ), ( ), ( l k g l k g y g l k d, r r arctg r r Gr Élkeresés differencia kereséssel (Differencial) r r Filters Edge Detection Edge Differential / Szűrők Élkeresés Szélek Differenciál, r r arctg r r Gr Gaussok különbsége / Different of Gaussian DoG Filters Edge Detection Different of Gaussian / Szűrők Élkeresés Gaussok különbsége
42 4 Roberts módszere A változás sebessége a jobbra lefelé és a balra lefelé szomszéd vizsgálatával. Az átlós, vékonyabb vonalakat keresi., r r 4, r r arctg r r Gr Filters Edge Detection Edge Roberts / Szűrők Élkeresés Szélek Roberts Prewit módszere A változás sebessége a vízszintes és a függőleges irányban A vízszintes és a függőleges vonalakat keresi. 6, 6 p p P P arctg, P P Gr Filters Edge Detection Edge Prewit compass/ Szűrők Élkeresés Szélek Prewit iránytű
43 43... Sobel módszere A változás sebessége a vízszintes és a függőleges irányban áltagoló differenciál operátorral. 8, 8 s s, s s arctg s s Gr Filters Edge Detection Edge Sobel/ Szűrők Élkeresés Szélek Sobel Filters Edge Detection Sobel/ Szűrők Élkeresés Sobel
44 A Sobel függvény magasabbrendű deriváltakra is kiterjeszti a számítást. void Sobel(InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize=3, double scale=, double delta=, int bordertype=border_default ) src Az input; dst Az output ugyanolyan méret és csatornaszám mint az src; ddepth Az output mélysége (hány bites), - esetén ua, mint az src; dx hanyadik derivált x irányban; dy hanyadik derivált y irányban; ksize a kiterjesztett Sobel kernel mérete, 3, 5, vagy 7; scale opcionális derivált nagyítási faktor; delta az eredmények opcionális eltolása. bordertype A határ extrapolációja (default extrapoláció). #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat gray; cvtcolor(kepbe, gray, v CV_BGRGRAY); imshow("szurke", gray); Mat kepki; return ; v Sobel(gray, kepki, CV_8U,, ); imshow("sobel", kepki); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; 44
45 ... Élkeresés a változás gyorsulása alapján (Laplace) 8, 4,, ), ( ), ( ), ( ), ( ), ( ), ( ), ( ), ( ), ( ), ( l k g l k g l k g l k g l k g l k g l k g l k d l k d d l k dd x x 45 ), ( ), ( ), ( ), ( ), ( ), ( ), ( ), ( ), ( ), ( l k g l k g l k g l k g l k g l k g l k g l k d l k d d l k dd y y Vízszintes Függőleges Vízszintes + függőleges Vízszintes+függőleges+átlós void Laplacian(InputArray src, OutputArray dst, int ddepth, int ksize=, double scale=, double delta=, int bordertype=border_default ) src Az input; dst Az output ugyanolyan méret és csatornaszám mint az src; ddepth Az output mélysége (hány bites), - esetén ua, mint az src; ksize a kiterjesztett Sobel kernel mérete páratlan, pozitív; scale opcionális derivált nagyítási faktor; delta az eredmények opcionális eltolása. bordertype A határ extrapolációja (def:extarpoláció). Filters Edge Detection Edge Laplace/ Szűrők Élkeresés Szélek Laplace
46 #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat gray; cvtcolor(kepbe, gray, v CV_BGRGRAY); imshow("szurke", gray); Mat kepki; // In, out, melység Laplacian(gray, kepki, v CV_8U); imshow("sobel", kepki); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 46
47 ...3 Élkeresés a Canny módszerével. Gauss zajszűrés. Vízszintes és függőleges gradiens komponensek Az irány kerekítve,45,9,35 fokra 3. Nem maximum eltüntetés (csak akkor és, ha kiemelkedő) 4. Gradiens küszöb G > küszöb felső él jelölt G < küszöb alsó nem éljelölt Ha G > küszöb alsó és G < küszöb felső éljelölt ha a szomszédos G > küszöb felső : vagy 3: a javasolt küszöb felső :küszöb alsó arány void Canny(InputArray image, OutputArray edges, double threshold, double threshold, int aperturesize=3, bool Lgradient=false ) image edges threshold threshold aperturesize Lgradient egy csatornás 8-bit input. output él térkép azonos méretben. alsó határ. felső határ. a Sobel() operátor mérete. pontosabb, vagy kevésbé pontos gradiens norma. 47
48 #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat gray; cvtcolor(kepbe, gray, v CV_BGRGRAY); imshow("szurke", gray); Mat edge; // In, out, tralsó, trfelső Canny(gray, edge, v 64,8); imshow("canny", edge); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 48
49 Sobel Laplace Canny 49
 void on_trackbar(int, void*) { k S Id k L")
50 .. Képek élesítése... Csúszka int createtrackbar(const string& trackbarname, const string& winname, int* value, int max, TrackbarCallbackonChange= on_trackbar, void* userdata=) void on_trackbar(int, void*) { k S Id k L 4 k 4k k Élesítő tényező (/4, /8, /6) k... Élesítő konvolúció (filterd) #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int slider = ; int slidermax = ; void on_trackbar(int, void*) { // csuszka esemeny int main(int argc, char** argv) { VideoCapture cap; cap.open(); // default kamera az első namedwindow("eleskonv", WINDOW_NORMAL); createtrackbar("eles","eleskonv", &slider, v slidermax, on_trackbar); //Csuszka Mat frame; Mat kepki; for (;;) { return ; v cap >> frame; if (frame.empty()) continue; imshow("picture", frame); Mat kern = Mat::zeros(3, 3, CV_8S); kern.at<char>(, ) = -slider; kern.at<char>(, ) = -slider; kern.at<char>(, ) = -slider; kern.at<char>(, v ) = -slider; kern.at<char>(, ) = +4*slider; filterd(frame, kepki, -, kern); // in, out, in a meghatározómélys, a mag imshow("eleskonv", kepki); int c = waitkey(3); if (c == 'q' c == 'Q') break; 5
51 ...3 Éles kép=.5*kép-.5*blur(kép) void addweighted(inputarray src, double alpha, InputArray src, double beta, double gamma OutputArray dst, int dtype=-); src az első input tömb. alpha az első input tömb súlya. src a második input tömb. beta a második input tömb súlya. gamma skalár minden szummához hozzáadva. dst az output tömb. dtype A kívánt output adatmélység (hány bites). Ha -, akkor az input a meghatározó; dst = saturate(src alpha + src beta + gamma) saturate = min(max x,, max x ) #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat image; //in, out, méret, xszórás GaussianBlur(kepbe, image, vcv::size(3, 3), 3); Mat kepki; addweighted(kepbe,.5, image, v -.5,, kepki); imshow("eles", kepki); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 5



52 ...4 Élességállítás z elteres(z) = szelesség magassag szelesseg magassag i= j= frame i, j blur(frame i, j = max 5
53 Zajcsökkentő élkiemelés Növelt területű Prewitt operátor, #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat kepbe = imread("c:\\users\\public\\pictures\\sample Pictures\\Desert.jpg"); imshow("kep", kepbe); Mat image; Mat kern = Mat(Size(7, 7), CV_8S); kern = Mat::zeros(7, 7, CV_8S); for (int i = ; i < 7; i++) for (int j = ; j < 7; j++) { if (j < 3) kern.at<char>(i, j) = -; if (j > 3) kern.at<char>(i, j) = ; filterd(kepbe, image, -, kern); //in, out, az input mélység az alap, a mag Mat kepki; kern = Mat::zeros(7, 7, CV_8S); for (int i = ; i < 7; i++) for (int j = ; j < 7; j++) { if (i < 3) kern.at<char>(i, j) = -; if (i > 3) kern.at<char>(i, j) = ; filterd(image, kepki,, kern); imshow("maxprew", kepki); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; v v v v
54 54 -k -k -k -k +4*k -k -k -k -k.5*kép-.5*blur(kép),
![...6 Intenzitás korrekció Intenzitástartomány kiemelése intenzitás float eh[4] = { 4.6977377596e-5, -.567446595573, 4.97747475967, -89.](/docs-images/88/115856589/images/55-1.jpg "6437649854 ; uchar gamma(uchar xbe){ double x = double(xbe); if (x < ) return ; else return eh[]*x*x*x + eh[]*x*x + eh[]*x +eh[3]; VideoCapture cap; // AVI video cap.")
55 ...6 Intenzitás korrekció Intenzitástartomány kiemelése intenzitás float eh[4] = { e-5, , , ; uchar gamma(uchar xbe){ double x = double(xbe); if (x < ) return ; else return eh[]*x*x*x + eh[]*x*x + eh[]*x +eh[3]; VideoCapture cap; // AVI video cap.open("c:\\munka\\83_teszt_ _free_.avi"); Mat frame, gframe; for (;;) { try { cap >> frame; gframe = frame.clone(); imshow("picture", frame); //megmutatja a framet for (int i = ; i < frame.cols*3; i++) for (int j = ; j < frame.rows; j++) gframe.at<uchar>(j, i) = gamma(frame.at<uchar>(j, i)); imshow("gamma", gframe); //megmutatja a framet catch (...) { break; int c = waitkey(3); if (c == 'q' c == 'Q') break; f()= f'()=4 f(55)= f'(55)= intenzitás z=; m=4; A=[x^3,x^,x,;3*x^,*x,,;3*55^,*55,,;55^3,55^,55,]; B=[,m,,z]'; xx=linsolve(a,b) figure ('Name', 'Interpoláció',... % grafikus ablak 'NumberTitle','off'); z=::55; plot(z,z,'-b',z,f(z,xx),'-r'); % függvényrajzolás shg; function y=f(x,xx) % függvény-definíció y=xx(4)+xx(3)*x+xx()*x.^+xx()*x.^3; end 55
56 .. Szegmentálás Szegmentálás, csoportosítás, rendezés érzékelés alapján (Segmentation, grouping, perceptual organization): az összetartozó jellemzők összegyűjtése, csoportosítása Szegmentálás felülről lefelé (Top-down ): közös ismert objektum hasonló pixeleinek keresése Szegmentálás lentről fölfelé (Bottom-up ): azonos jellegű pixelek összegyűjtése pixelből indítva... Globális szegmentálás küszöbértékekkel ( ) Ha a hasonló intenzitású keresett elem és a háttér között nagy a kontraszt. k(x,y)<=t (objektum) db% k(x,y)>t (háttér) T vagy k(x,y)>=t (objektum) k(x,y)<t (háttér) bináris képet készít. L intenzitás 56
57 threshold(inputarray src, OutputArray dst, double thresh, double maxval, int type) src Az input tömb ( csatorna, 8-bit vagy 3-bit floating point); dst Az output tömb azonos méret; thresh A threshold érték; maxval A használt max érték (THRESH_BINARY és THRESH_BINARY_INV esetén); type THRESH_BINARY, THRESH_BINARY_INV, TRESH_TRUNC, TRESH_TOZERO, TRESH_TOZERO_INV. #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int slider = ; int slidermax = ; void on_trackbar(int, void*) { // csuszka esemeny int main(int argc, char** argv) { VideoCapture cap;cap.open(); // default kamera az első namedwindow("picture", WINDOW_NORMAL); namedwindow("szurke", WINDOW_NORMAL); namedwindow("treshold", WINDOW_NORMAL); int slider = 7; int slidermax = 55; createtrackbar("csuszka", "Treshold", &slider, slidermax, on_trackbar); //Csuszka Mat frame, gray, trash; for (;;) { cap >> frame; if (frame.empty()) continue; imshow("picture", frame); cvtcolor(frame, gray, CV_BGRGRAY); imshow("szurke", gray); threshold(gray, trash, slider, 55, TRESH_BINARY); return ; v imshow("treshold", trash); int c = waitkey(3); if (c == 'q' c == 'Q') break; 57
58 ... Az Isodata algoritmus ( ) I. A hisztogram két részre (T ) II. A két jellemző terület intenzitás közepe m (T ) = L i <T p il i L i <T p i M (T ) = L i T p i L i L i T p i III. Az új közép T =(M +m )/ m j+ (T j ) = IV. Ameddig T j+ - T j <ε L i <T j p il i L i <T j p i M j+ (T j ) = Li Tj p i L i L i T j p i p T - db% m m T T M M L intenzitás 58
59 ... Otsu módszere ( ) Keresi azt a T küszöbértéket, melyre minimális a két rész szórásnégyzeteinek súlyozott átlaga (σ ) σ (T) = ω T σ +ω T σ Darabszámok a hisztogram két felén ω (T) = Li <T p i ω (T) = Li T p i A p i hisztogram elemekkel kifejezve a várható érték T μ (T) = L i <T p il i ω (T) μ (T) = L i T p il i ω (T) p (db) µ µ A szórásnégyzet a két félen σ T = L i <T p i μ (T) ω (T) σ T = Bizonyítható, hogy σ (T) = ω T σ +ω T σ L i T p i μ (T) ω (T) minimális ha L intenzitás Γ (T) = ω T ω T μ T μ T maximális 59
60 ... Adaptív (lokális) szegmentálás küszöbértékekkel ( ) void adaptivethreshold(inputarray src, OutputArray dst, double maxvalue, src dst maxval adaptivemethod hresholdtype blocksize C #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { VideoCapture cap; cap.open(); // default kamera az első Mat frame, gray, trash; for (;;) { cap >> frame; if (frame.empty()) continue; imshow("picture", frame); cvtcolor(frame, gray, CV_BGRGRAY); imshow("szurke", gray); return ; int adaptivemethod, int thresholdtype, int blocksize, double C) A forrás 8-bites tömb. Az output tömb azonos méret; A használt max érték (THRESH_BINARY és THRESH_BINARY_INV esetén); Az algoritmus ADAPTIVE_THRESH_MEAN_C esetén a környezet átlaga vág; ADAPTIVE_THRESH_GAUSSIAN_C esetén a környezet Gauss maggal súlyozott átlaga vág; Hogyan vág THRESH_BINARY, THRESH_BINARY_INV; A figyelembe vett négyzet oldala 3,5,7, ; Levonódik az átlagból. adaptivethreshold(gray, trash, 55, CV_ADAPTIVE_THRESH_MEAN_C, CV_THRESH_BINARY,9,); imshow("treshold", trash); int c = waitkey(3); if (c == 'q' c == 'Q') break; v 6
61 ... Küszöbérték lokális hisztogram alapján ( ) Niblack algoritmus Vágás a lokális várható érték (m) és a standard szórásnégyzet (s) alapján. T Nb = m + k s k =. Sauvola algoritmus T Nb = m + k N p N P p i m p i a pontok "színe i= N p a pontok száma T S = m + k s max(p i ) k =.5 Wolf módszer T W = k m + k min p i + k s max p i m min p i k =.5 6
62 AdaptiveTreshold Treshold 6
63 ...3 Részhalmazokra bontás fuzzy logikával ( ). A hibás pontok kiszűrése. A pontok fényessége közti különbségek minimális, átlagos és maximális értéke minimum, átlag és maximum. 3. A pontok fényessége közti különbség kicsi, közepes és nagy lehet. Annak valószínűségét, hogy a pontpár távolsága melyik csoportba tartozik, az ábra, szakaszonként lineárisan változó görbéi szerint alakul (fuzzyfüggvények) 4. Válasszuk ki a legfényesebb pontot! 3. Vizsgáljuk az összes többi pontot! Ha az éppen vizsgált pont és a legfényesebb pont fényességének különbsége legnagyobb valószínűséggel nagy, akkor a pont a nemfényes csoportba kerül 4. Egyébként a fényesek közé. valószínűség kicsi közepes nagy minimum átlag maximum pontpárok távolsága 63
64 ...4 Elárasztás ( ) Tartománymagok kijelölése (pl. egy nem sorolt pont) Tartományok növelése a homogenitási feltétellel szín, homogenitás statisztika a tartományon int floodfill(inputoutputarray image, Point seedpoint, Scalar newval, Rect* rect=, Scalar lodiff=scalar(), Scalar updiff=scalar(), int flags=4 ) int floodfill(inputoutputarray image, InputOutputArray mask, Point seedpoint, Scalar newval, Rect* rect=, Scalar lodiff=scalar(), Scalar updiff=scalar(), int flags=4 ) image (mask) seedpoint newval rect lodiff updiff flags A kitöltés OpenCV osztály (pl- Mat) I/O. 3 csatornás, 8-bitites vagy float. Módosul az első ovrload-ban, a illetve a másodikban ha a flags FLOODFILL_MASK_ONLY beállított.. Opcionális, egycsatornás 8 bites image+ oszlop + sor. Inputként a nem pixelek leállítják a kitöltést, outputként a kitöltött pixelelek értéke ; A kezdőpont;. A kifestett pixelek értéke; Opcionális output parametert a függvény állítja a legkisebb kifestett tégla; A max. alsó fényesség/szín eltérés a vizsgált és a már kifestett,szomszédos pixelek, vagy kezdőpont közt; A max. felső fényesség/szín eltérés a vizsgált és a már kifestett szomszédos pixelek, vagy kezdőpont közt. Az első 8 bit a kapcsolódást beállító érték. A default a 4 esetén csak a legközelebbi szomszédok. 8 esetén a sarkok is. A következő 8 bit a kitöltő érték (default ). A többi bitszintű OR-ral ( ) ha a FLOODFILL_FIXED_RANGE beállított akkor a maggal, egyébként a szomszéddal hasonlít, ha a FLOODFILL_MASK_ONLY akkor a mask-kal beállított helyeken a -5 bitekkel fest. src x seed, y seed lodiff src x, y src x seed, y seed + updiff Képlet szerint fényesség vagy R,G,B síkok. 64
; // default kamera az első if (!cap.isopened()) { std::cerr << \"Nem olvasható a video\" <<std::endl; return -; Mat frame, gray; for (;;) { cap >> frame; if (frame.")
65 #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { VideoCapture cap; cap.open(); // default kamera az első if (!cap.isopened()) { std::cerr << "Nem olvasható a video" <<std::endl; return -; Mat frame, gray; for (;;) { cap >> frame; if (frame.empty()) continue; cvtcolor(frame, gray, COLOR_BGRGRAY); imshow("picture", frame); // in, középpont, festőszín, mintégla, mindiff, maxdiff csak szomszéd return ; v floodfill(gray, Point(gray.cols /, gray.rows / ), 55, &Rect(,,5,5), Scalar(), Scalar()); imshow("gray", gray); int c = waitkey(3); if (c == 'q' c == 'Q') break; 65
66 ...4. Elárasztás statisztikával ( ) Tartománymagok kijelölése (pl. egy nem sorolt pont) Tartományok növelése a statisztikával Legyen P a vizsgált pont intenzitása, körülötte T tartományban N szomszédos pont! A tartományban p i a pontok intenzitása μ = N T p i az intenzitás várható értéke σ = N T μ p i az intenzitás korrigált tapasztalati szórásnégyzete τ = N P μ N+ σ τ K küszöbszám akkor szomszédos pont a régióhoz tartozik. 66
 képet A tartományoknak nincs közös pontjuk T i =")
 = igaz H R i R j = hamis ha R i")
67 ...5 Szegmentálás tartományokkal ( ) A kép tartományai legyenek T i -k! A tartományok lefedik a teljes (T) képet A tartományoknak nincs közös pontjuk T i = T T i T j = ha i j Minden tartományra megfogalmazható homogenitási kritérium (H) Szomszédos tartományok uniója nem homogén H(T i ) = igaz H R i R j = hamis ha R i és R j szomsz. 67
68 ...5. Vágás és egyesítés Legyen a homogenitási feltétel P(T) = igaz ha a T tartomány pontjai kevéssé eltérő színűek!. Vágjuk az inhomogén képet (P(T)=false) négy részre!. Ha a szomszédos területek homogének P(T i + T i+ )=igaz, akkor azokat vonjuk össze. 3. Az inhomogén területeket vágjuk újabb 4 részre! : : 3 68
69 ...5. Csoportosítások Klaszterezés Legyen adott k darab diszjunkt tartomány (klaszter)! C, C, C k! A pontok intenzitása p i Jelölje μ, μ, μ k a C i tartományokban az intenzitás-középértékeket! A tartományokban számíthatjuk a intenzitások a a tartomány intenzitás átlagától számított négyzetes eltéréseinek összegét. k LSE = p i μ j j= p i C j Az összes csoportosítás közül az lesz a legjobb, ahol a tartományok fenti négyzetes eltéréseinek összege a legkisebb. (Least Square Error) LSE = min 69
. 4. Kiszámolja az új klaszter középpontokat. 5.")
70 K-means algoritmus. Kiválasztja a klaszterek számát (k).. A felhasználó önkényesen, vagy véletlenszerűen létrehoz k számú klaszterközéppontot. 3. Minden egyes pontot abba a klaszterbe sorol, amelynek középpontjához a legközelebb helyezkedik el (RGB, xyrgb térben). 4. Kiszámolja az új klaszter középpontokat. 5. Addig ismétli az előző két lépést (iterál), amíg valamilyen konvergencia kritérium nem teljesül (általában az, hogy a besorolás nem változik). Arthur and Vassilvitskii javaslata. Két klaszterben (Y, Z) legyen X az a pont amelyik intenzitását (RGB távolságát, xyrgb távolságát) tekintve leginkább eltér (D) saját klaszterének intenzitás átlagától!. Legyen q a klaszterek átlagintenzitásai (átlag RGB távolságai, átlag xyrgb távolságai) közti átlagos különbség! 3. Ha D>q/, akkor új klaszter keletkezett az aktuális X középponttal. 7
71 double kmeans(inputarray data, int K, InputOutputArray labels, TermCriteria criteria, int attempts, int flags, OutputArray centers=noarray() ) data K labels criteria attempts flags centers A csoportosítandó adatok n dimenziós float koordinátájú ponttömbben. Pl. count elemű RGB tömb: Mat points(count, 3, CV_3F); Mat points(count, CV_3FC3); std::vector<cv::point3f> points(count); A csoportok kívánt száma; I/O egésztömb, minden ponthoz tartozik majd egy klaszterindex; A leállási feltétel, az iterációk száma és/vagy a pontosság. struct TermCriteria{ int type,//cv_termcrit_iter és/vagy CV_TERMCRIT_EPS int maxcount, double epsilon ; A kísérletek száma; A működési mód: KMEANS_RANDOM_CENTERS - minden kísérletnél véletlen kezdőpontok. KMEANS_PP_CENTERS - speciális középpont választás Arthur and Vassilvitskii javaslata; KMEANS_USE_INITIAL_LABELS - a felhasználó által definiált középpontok; A klaszter középpontok egy klaszter-adatsor minden középponthoz. A visszatérési érték a adatpontok és a hozzájuk tartozó középpontok közti eltérések négyzetösszege. i p i center pi 7
; imshow(\"image\", src); Mat samples(src.rows * src.cols, 3, CV_3F); for (int y = ; y < src.rows; y++) for (int x = ; x < src.cols; x++) for (int z = ; z < 3; z++) // áttölti vektorba samples.")
72 #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat src = imread("gyumolcs.jpg"); imshow("image", src); Mat samples(src.rows * src.cols, 3, CV_3F); for (int y = ; y < src.rows; y++) for (int x = ; x < src.cols; x++) for (int z = ; z < 3; z++) // áttölti vektorba samples.at<float>(y + x*src.rows, z) = src.at<vec3b>(y, x)[z]; int clustercount = 5; Mat labels; int attempts = 5; Mat centers; //BGRkép, klaszterdb, klindex, iter, kísérletek, spec javaslat,középpontokszínei kmeans(samples, clustercount, labels, TermCriteria(CV_TERMCRIT_ITER CV_TERMCRIT_EPS,,.), attempts, KMEANS_PP_CENTERS, centers); v Mat new_image(src.size(), src.type()); for (int y = ; y < src.rows; y++) for (int x = ; x < src.cols; x++) { int cluster_idx = labels.at<int>(y + x*src.rows, ); //a pont csoportja new_image.at<vec3b>(y, x)[] = centers.at<float>(cluster_idx, ); new_image.at<vec3b>(y, x)[] = centers.at<float>(cluster_idx, ); new_image.at<vec3b>(y, x)[] = centers.at<float>(cluster_idx, ); // csoportszínezés imshow("clustered image", new_image); for (;;) { char key = (char)waitkey(); if (key == 7 key == 'q' key == 'Q') break; return ; 7
73 ..3 Alakfelismerés..3. Alakfelismerés sablonillesztéssel r n i n i ( sz ( sz i i sz sz ) ) ( sz n i i ( sz sz i ) sz A korrelációs (a várható értéktől való eltérések szorzata covariancia osztva a szórások szorzatával) együttható két tetszőleges elemhalmaz közötti lineáris kapcsolat nagyságát és irányát jellemzi A minta (sz ) korrelációja a kép részleteivel (sz ) A legjobb illeszkedést az a képrészlet adja, amelyre a korrelációs együttható a legnagyobb...3. D korreláció konvolúcióval Y M N m,n X S i j S( i, j ) X( m i,n j ) S a a keresendő minta, X a kép Y az a hely mennyire hasonlít a mintára célszerű elvégezni valamilyen élkiemelő szűrést ) 73
74 ..3. Alakfelismerés Hough transzformációval..3.. Egyenesek Azon (x,y) síkbeli pontok, melyekre a normálegyenlet teljesül (Hesse-féle normálegyenlet) r = (x, y) (cosθ,sinθ) r Θ n(cosθ,sin Θ) (x,y) Egyetlen térbeli pont egy egyenes-sereggel modellezhető, melynek adatai az origóból húzott merőleges hossza (r) és ennek szöge Θ r Hough tér r r Θ A pontot jellemző egyenesek a képtérben A paramétertér sin(θ) jellegű görbéjének minden egyes pontjához a képtér egy pontot definiáló egyenese tartozik π π Az egyenesek paraméterei a paramétertérben Θ 74
75 y r x Ha a képtér minden egyes pontját transzformáljuk egymást metsző görbéket kapunk. Θ π π A görbék metszéspontja a képpontok egyeneséhez tartozik. Ennek origótól mért távolsága r és Θ szöge mérhető Keressük tehát a metszéspontokat (a Hough tér pixeleinek lokális maximuma) amelyek a képtér egyeneseit jelentik. 75
 image 8-bit,")
 adatokkal jellemezve.")
76 void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=, double stn= ) image 8-bit, egycsatornás bináris kép. lines A vonalak vektora (r,θ) adatokkal jellemezve. rho Távolság érzékenység. theta Szög bontás (radián). threshold Hough köszöb. 76
; Mat vonalak; cvtcolor(vonalbe, vonalak, COLOR_BGRGRAY); vector<vecf> lines; //in, vonalak tömbje, távérz, szögbontás, threshold HoughLines(vonalak, lines, v, CV_PI / 6, ); Mat vonalak =")
; i++) { float rho = lines[i][], theta = lines[i][]; Point pt, pt; double a = cos(theta), b = sin(theta); double x = a*rho, y = b*rho; pt.x = cvround(x + * (-b)); pt.y = cvround(y + * (a)); pt.")
77 #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat vonalbe = imread("vonalak.bmp"); Mat vonalak; cvtcolor(vonalbe, vonalak, COLOR_BGRGRAY); vector<vecf> lines; //in, vonalak tömbje, távérz, szögbontás, threshold HoughLines(vonalak, lines, v, CV_PI / 6, ); Mat vonalak = Mat::zeros(vonalak.rows, vonalak.cols, CV_8UC); for (size_t i = ; i < lines.size(); i++) { float rho = lines[i][], theta = lines[i][]; Point pt, pt; double a = cos(theta), b = sin(theta); double x = a*rho, y = b*rho; pt.x = cvround(x + * (-b)); pt.y = cvround(y + * (a)); pt.x = cvround(x - * (-b)); pt.y = cvround(y - * (a)); line(vonalak, pt, vpt, 55, 3, CV_AA); // kép, kezdpt, vegpt, szín, vastagság, antialiasedvonal char ki[]; sprintf_s(ki, "%i", lines.size()); string s = ki; imshow("alap", vonalbe); imshow("hough" + s, vonalak); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 77
 a centrum az ismert sugarú körön van (jobb ábra). A körök metszéspontja lesz középpont.")
78 ..3.. Körök Egy kör egyenlete D-ben (x a) + (y b) = r (a,b) a középpont és r a sugár. Két lépésben fix sugarú körök középpontját keressük, és aztán keressük az optimális sugarat. D-ben minden egyes körponthoz (bal ábra) a centrum az ismert sugarú körön van (jobb ábra). A körök metszéspontja lesz középpont. For each pixel(x,y) For each radius r = to r = 6 // a lehetséges sugarak For each theta t = to 36 // a lehetséges szögek -36 a = x r * cos(t * PI / 8); // a középpont a koord b = y r * sin(t * PI / 8); // a középpont b koord A[a,b,r] +=; // szavazás end end end Ha nem ismerjük a rádiuszt, akkor a 3D helyett iterálunk.. Létrehozunk egy akkumulátor mátrixot A[a,b,r]=,. GaussBlur után szürkeárnyalatos képet készítünk, 3. A lehetséges sugarakon végigmenve számláljuk a köröket. Minden pixelen keresünk rmin és rmax között t=-36 fokig polár koordinátás köröket és ha elég sok metszéspont van a körön, akkor A[a,b,r] +=. 4. A lokális maximumok a lehetséges körök a Hough síkon. 5. A maximum a keresett kör. 78
; method A módszer csak CV_HOUGH_GRADIENT ; dp A kép és a kör-akkumulátor felbontásának inverz viszonya, dp= ugyanaz a felbontás.")
79 void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double mindist, double param=, double param=, int minradius=, int maxradius= ) image 8-bites, egycsatornás input; circles A körök output vektora (Vec3f); method A módszer csak CV_HOUGH_GRADIENT ; dp A kép és a kör-akkumulátor felbontásának inverz viszonya, dp= ugyanaz a felbontás. mindist Minimum távolság a körök között. param Parameter, CV_HOUGH_GRADIENT esetén Canny küszöb, a magasabb, az alacsonyabb a fele. param Parameter, CV_HOUGH_GRADIENT esetén a küszöb a középpontok keresésénél; minradius Minimum sugár; maxradius Maximum sugár. #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { Mat korbe = imread("korok.jpg"); Mat korgray; cvtcolor(korbe, korgray, COLOR_BGRGRAY); vector<vec3f> korok; HoughCircles(korgray, korok, CV_HOUGH_GRADIENT,, v korgray.rows /,,,, korgray.rows / ); for (size_t i = ; i < korok.size(); i++) { Point center(cvround(korok[i][]), cvround(korok[i][])); int radius = cvround(korok[i][]); circle(korbe, center, 3, Scalar(, v 55, ), -, 8, ); circle(korbe, center, radius, v Scalar(,, 55), 3, 8, ); // kép, közpt, sugár, szín, vonalvast, vonaltip, tizedesek száma char ki[]; sprintf_s(ki, "%i", korok.size()); string s = ki; imshow("alap" + s, korbe); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 79
80 ..3.3 Előtér, háttér grabcut algoritmus A különböző színek előfordulási valószínűségét és szomszédos pixelek hasonlóságát leíró energiafüggvény optimálásán alapuló módszer void grabcut(inputarray img, InputOutputArray mask, Rect rect, InputOutputArray bgdmodel, InputOutputArray fgdmodel, int itercount, int mode=gc_eval ) img mask rect bgdmodel fgdmodel itercount mode Input 8 bites 3 csatornás kép; I/O 8 bites egycsatornás maszk. Ha a mode GC_INIT_WITH_RECT, akkor a függvény inicializál az alábbi elemekkel: GC_BGD - nyilvánvaló előtér pixel, GC_FGD - nyilvánvaló háttér pixel, GC_PR_BGD - lehetséges háttér pixel, GC_PR_FGD - lehetséges előtér pixel; A szegmentálandó objektumot befoglaló téglalap ha a mode= GC_INIT_WITH_RECT; Átmeneti előtér tömb. Átmeneti háttér tömb. Az iterációk száma. Újra indítható a mode=gc_init_with_mask vagy mode=gc_eval paraméterekkel;. a számítás módja: GC_INIT_WITH_RECT - téglalapban (rect) dolgozik a függvény,. GC_INIT_WITH_MASK - megadott maszkkal dolgozik a függvény a GC_INIT_WITH_RECT és GC_INIT_WITH_MASK kombinálható, ilyenkor a téglalapon kívülháttér van (GC_BGD). GC_EVAL - folytatni lehet egy megszakított számítást. void compare(inputarray src, InputArray src, OutputArray dst, int cmpop) Összehasonlít két tömböt, vagy egy tömböt és egy előteret/hátteret elemenként src Az első egycsatornás tömb; src A második egycsatornás tömb, vagy egy konstans ami egy szám (jelölhet jelleget GC_BGD, GC_FGD, GC_PR_BGD, GC_PR_FGD); dst Az output tömb; cmpop Az összehasonlítás jellege (CMP_EQ, CMP_GT, CMP_GE, CMP_LT, CMP_LE, CMP_NE) 8
 { Mat image = cv::imread(\"lena.jpg\"); Mat image = image.")
;// határoló rectangle Mat result; Mat bgmodel, fgmodel; //kép, eredm, rect, temp, temp, iterdb, initmód grabcut(image, result, rect,")
, CV_8UC3, Scalar(,, )); image.")
81 #include "stdafx.h" #include <opencv/opencv.hpp> #include <iostream> using namespace cv; using namespace std; int main() { Mat image = cv::imread("lena.jpg"); Mat image = image.clone(); Rect rect(4, 4, image.cols -, image.rows - 7);// határoló rectangle Mat result; Mat bgmodel, fgmodel; //kép, eredm, rect, temp, temp, iterdb, initmód grabcut(image, result, rect, bgmodel, v fgmodel,, cv::gc_init_with_rect); compare(result, GC_PR_FGD, v result, CMP_EQ); //in, előteret keres, eredmény, = az előtérrel Mat foreground(image.size(), CV_8UC3, Scalar(,, )); image.copyto(foreground, vv result); //result to foreground Mat background = image - foreground; rectangle(image, rect, cv::scalar(55, v 55, 55), ); // kép, tégla, szín, vonalvastagság imshow("lena", image); imshow("hatter", background); imshow("eloter", foreground); for (;;) { int c = waitkey(3); if (c == 'q' c == 'Q') break; return ; 8
82 ..4 Diszkrét Fourier transzformáció Legyen f periodikus valós függvény periódussal. A függvény értékei az f Δx=π/(n+) π x k = πk n + pontokban f(x k ) [, π) k =,,. n Egyértelműen meghatározható a Az x k pontokra n f x = c j e ijx = c j (cos(jx) + i sin(jx)) i = j= j= n f (x k ) = c j e ijx k k =,, n i = j= n 8
83 Jelölje π i w = e n+ az n+. komplex egységgyököt! Ekkor e ix k = e ikπ f (x k ) = n j= f (x k ) = n j= c j e ijx k = c j e ijx k k =,, n i = n j= c j (w k ) j n+ = w k k =,,, n Egyenletrendszer c j komplex ismeretlenekre együttható mátrixa Vandermonde n Létezik pontosan egy megoldás. Legyen a komplex n+ dimenziós vektorok skaláris szorzata x, y = n k= x k y k 83 π n + így bármely f=[f(x ), f(x ), f(x n )] és g=[g(x ), g(x ), g(x n )] vektorok esetére f, g = w w n w w n w n n k= w n n f(x k ) g(x k ) Φ n x = det(h) = w k= c k x k f Δx=π/(n +) x x x x n n x n x n n π
84 ..4. Diszkrét Fourier transzformáció számítása Bármely f=[f(x ), f(x ), f(x n )] és g=[g(x ), g(x ), g(x n )] vektorok esetére e ilx = [e ilx, e ilx, e ilx n] és e ijx =[e ijx, e ijx, e ijx n] vektorokra (i =-) e ilx, e ijx = n k= e ilx merőleges e ijx e i(l j)x k = n k= (w l j ) k = ha l j Ortogonális bázis n + ha l = j ha l j Hiszen mértani sor összege (l j) és w l-j egységgyök w n+ = Az x k pontokra a diszkrét trigonometrikus interpoláció f (x k ) = w l j n+ w l j Az f=[f(x ), f(x ), f(x n )] vektort szorozzuk e -ilx = [e -ilx, e -ilx, e -ilx n] vektorral! n k= n j= f(x k )e ilx k = c j e ijx k k =,, n i = n n k= j= c j e ijx ke ilx k = c l = (f, eilx ) n + = (f, ei(n++l)x ) n + n j= c j n k= e ix k(j l) = (n + )c l e ni e i = c n++l periodikusak n + re f(c,, C n ) 84
85 ..4. FFT Legyen n= m -! Számítsuk ki a összeget! Φ j = n k= a k w kj j =,, n Ha ismertek az f(x k )-k, a c j -ket határozzuk meg (analízis), akkor a k = f(x k) Ha ismertek a c j -k, az f(x k )-kat határozzuk meg (szintézis), akkor a k = c k Ο(n ) művelet - n együttható n művelettel. Bontsuk k-t páros (l) és páratlan (l+) tagokra! jelölje n = m- -! n+ n a lw lj + n a l+w l+ j = n a l(w ) lj +w j n a l+(w ) lj Φ j = l= l= l= l= Φ j = Ψ j + w j Χ j j =,, n Ψ(j)-t és Χ(j)-t csak fele annyi indexre kell kiszámítani j=,, n mert (w ) j+n + = (w ) j+n+ = (w ) j És így tovább Q m = * Q m- + m két szumma + m szorzás 85
86 A műveletek száma Q m = m m Q m = * Q m- + m két szumma + m szorzás Bizonyítás teljes indukcióval Q =, Ha Q m- =(m-) m-, akkor Q m =(m-) m- + m =m m Mivel m =n+; /log () m * log ()=log (n+) m= log (n+) a műveletek száma tehát (n+) * log (n+) O(n * log (n)) matematikai művelet < O(n ) Ha nem hatvány, akkor n+=3 * m, 5 * m, 86
87 ..4.3 Fourier sor/transzformáció értelmezés Vektorok az R 3 -ben 3 a, b = a i b i skaláris szorzat i= a, b = a b z f z R 3 f (x f, y f, z f ) a = a, a norma f = x f i + y f j + z f k k x f = f, i ; y f = f, j ; z f = f, k ; L-periodikus függvények I L N általánosan I L L a, b = abdx skaláris szorzat L i j y f x f y x I z L f (C,, C j,, C ) a, b = a b a = a, a norma N f = C j e jxi f C k e kxi j= k= N e i e i e ji C j = f, e jxi ; j (, ) i = I z L f (C,, C j,, C ) C k = f, e kxi ; k ( N, N) i = e i e Ni e i e ki e Ni f(c N,, C j,, C N ) 87
; % a jel hossza X = exp(-*t.^); % a jel impulzus f=figure('name',.")
88 ..4.4 Diszkrét Fourier transzformáció (FFT algoritmussal) Y = fft(x) - X jel diszkrét FFT transzformáltja X = ifft(y) - Y jel diszkrét inverz FFT transzformáltja Fs = 7; % minta frekvencia t = -.5:/Fs:.5; % az idõvektor L = length(t); % a jel hossza X = exp(-*t.^); % a jel impulzus f=figure('name',... % grafikus ablak 'A jel idõtartományban', 'NumberTitle','off'); plot(t,x) shg n = ^nextpow(l); % a legközelebbi hatvány Y = fft(x,n); % FFT n pontra f = Fs*(:(n/))/n; % a kirajzolt frekvenciák P = abs(y/(n/)); % a Fourier transzformált valós értékekkel f=figure ('Name',... % grafikus ablak 'Fourier transzfomált', 'NumberTitle','off'); plot(f,p(:n/+)) f3=figure ('Name',... % grafikus ablak 'A vissza-transzfomált jel', 'NumberTitle','off'); ix = ifft(y) % inverz FFT transzformáció plot(t,ix) shg 88
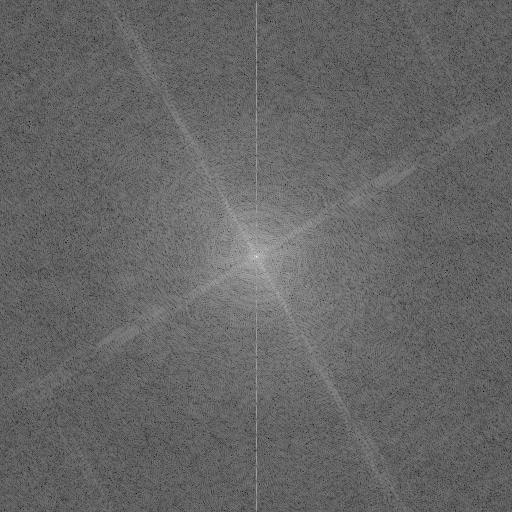
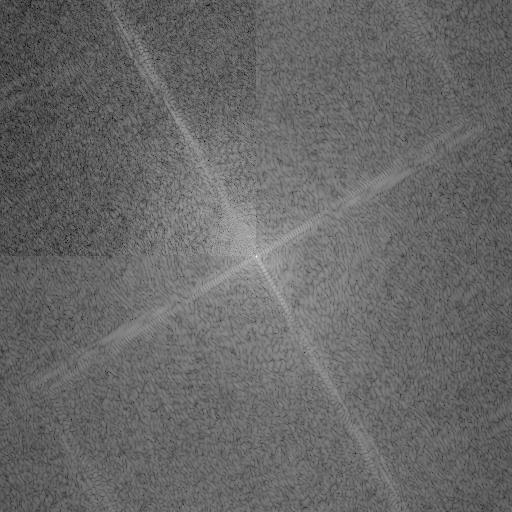
89 ..4.5 D-s diszkrét Fourier-transzformáció fk, l k M, l N f k,l k m +, l n + D n,m N M N M k l f k,l e mk i M e nl i N f k,l M N m n D n,m e ikm M e i ln N A Fourier transzformált abszolút értéke logaritmikus léptékben képként. Az (,) indexű tag tartalmazza az átlagos világosságot. D n,m értékek periodikusak N-re, M-re D n+n,m =D n,m, D n,m+m =D n.m D, és D N/,M/ valósak N/*M/ adat egyértelműen meghatározza A (k,l), a (k,n-l), az (M-k,l) és az (M-k,N-l) tagok azonosak 89


90 ,,,,M/-,M/,,,, N/-, N/-,M/- N/-,M/ N/-, N/, N/,M/- N/,M/ N/, N/-,,,M/-,M/, N/,M/ N/, N/, N/,M/- N/-,,M/,,,M/-,M/,,,,,M/-,,, N/-,M/ N/-, N/-, N/-,M/- 9
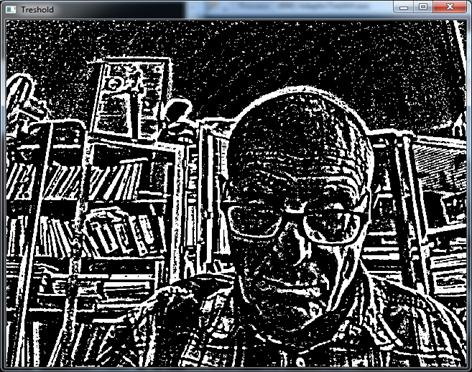
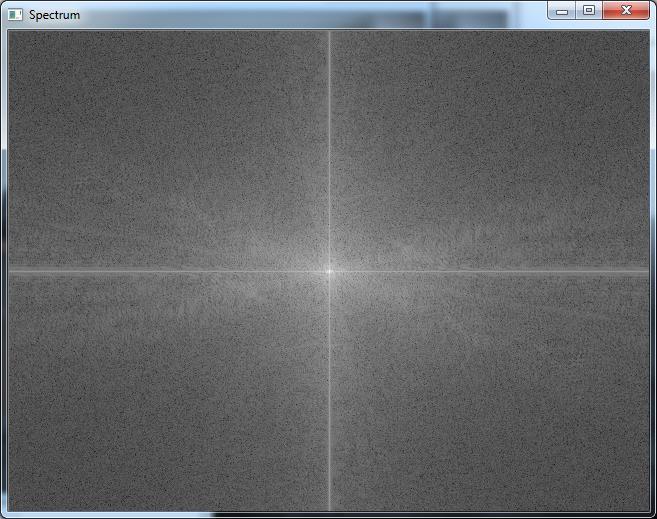
91 ..4.6 Képkezelés frekvencia-tartományban. Meghatározzuk a kép Fourier transzformáltját.. A Fourier transzformált szűrésével egyes komponenseket erősítünk, illetve csillapítunk. 3. Inverz Fourier transzformációval előállítjuk a módosított képet. Aluláteresztő szűrés zajcsökkentés, lágyítás Felüláteresztő szűrés A kis síkfrekvenciák kiszűrésével élkeresés, Nagy síkfrekvenciák erősítésével élesítés void dft(inputarray src, OutputArray dst, int flags=, int nonzerorows=) src input tömb valós vagy komplex. dst output tömb - a flagtől függő méret. flags DFT_INVERSE inverz D, D transzformáció a deafult transzformáció helyett. DFT_SCALE az eredmény skálázva (a tömbelemek számával osztva) DFT_INVERSE. DFT_ROWS transzformáció soronként (több transzformáció egyszerre) DFT_COMPLEX_OUTPUT D vagy D valós mátrix transzformáció komplex eredménnyel. DFT_REAL_OUTPUT D vagy D complex mátrix inverz transzformáció valós eredménnyel. nonzerorows ha nem nulla, akkor csak ez első nonzerorows eltérően kezelve. 9
92 #include "stdafx.h" #include <stdio.h> #include <opencv/opencv.hpp> using namespace cv; using namespace std; int main(int argc, char** argv) { VideoCapture cap; cap.open(); // default kamera az első Mat frame,gray,padded, magi, complexi, tmp, complexii; for (;;) { cap >> frame; if (frame.empty()) continue; imshow("picture", frame); if (frame.empty()) continue; cvtcolor(frame, gray, COLOR_BGRGRAY); imshow("gray", gray); int m = getoptimaldftsize(gray.rows); int n = getoptimaldftsize(gray.cols); // a határokra //az optimális méret copymakeborder(gray, padded,, m - gray.rows,, n - gray.cols, BORDER_CONSTANT, Scalar::all()); Mat planes[] = { Mat_<float>(padded), Mat::zeros(padded.size(), CV_3F) ; merge(planes,, complexi); // complex sík dft(complexi, complexi); // DFT logaritmikus skálában log( + sqrt(re(dft(i))^ + Im(DFT(I))^)) split(complexi, planes); // planes[] = Re(DFT(I), planes[] = Im(DFT(I)) magnitude(planes[], planes[], planes[]);// planes[] = magnitude magi = planes[]; magi += Scalar::all(); // a logaritmikus skála log(magi, magi); magi = magi(rect(,, magi.cols & -, magi.rows & -)); int cx = magi.cols / ; int cy = magi.rows / ; 9
93 return ; Mat q(magi, Rect(,, cx, cy)); // Átrendezés Mat q(magi, Rect(cx,, cx, cy)); Mat q(magi, Rect(, cy, cx, cy)); Mat q3(magi, Rect(cx, cy, cx, cy)); tmp; q.copyto(tmp); q3.copyto(q); tmp.copyto(q3); q.copyto(tmp); q.copyto(q); tmp.copyto(q); normalize(magi, magi,,, CV_MINMAX); imshow("spectrum", magi); Mat sz = Mat::zeros(complexI.rows, complexi.cols, CV_3FC); for (int i = ; i < complexi.rows; i++) for (int j = ; j < complexi.cols; j++) { if (i<.35*complexi.cols i>.65*complexi.cols j<.35*complexi.rows i <.65* complexi.rows) sz.at<float>(i, j) = ; else sz.at<float>(i, j) = ; complexi = complexi.mul(sz); dft(complexi, complexii, DFT_INVERSE + DFT_COMPLEX_OUTPUT); split(complexii, planes); magi = planes[]; normalize(magi, magi,,, CV_MINMAX); imshow("fftifft", magi); int c = waitkey(3); if (c == 'q' c == 'Q') break; 93


94 94
 DFT( Pozíció) DFT( Háttér ) DFT( M int a ) DFT( Pozíció) DFT( Kép ) DFT( M int a ) háttérzaj Pozíció DFT ( DFT( Kép ) DFT( M int a )")
95 4.3.3 Alakfelismerés frekvenciasíkban Kép M int a Pozíció Háttér DFT ( Kép ) DFT ( M int a ) DFT ( Pozíció ) DFT ( Háttér ) DFT( Kép ) DFT( M int a ) DFT( Pozíció) DFT( Háttér ) DFT( M int a ) DFT( Pozíció) DFT( Kép ) DFT( M int a ) háttérzaj Pozíció DFT ( DFT( Kép ) DFT( M int a ) )

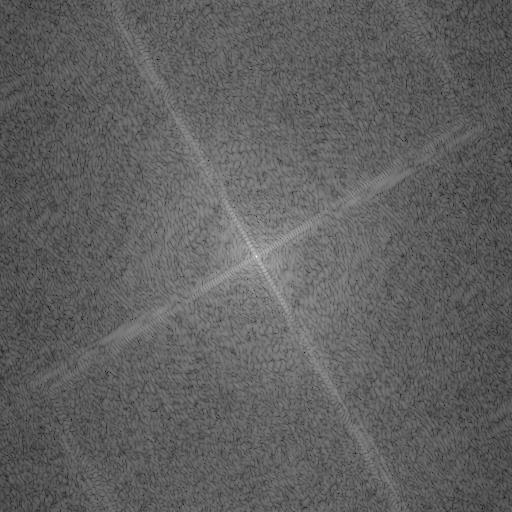
96 DFT(kép) DFT(minta) DFT(kép) DFT(Minta)



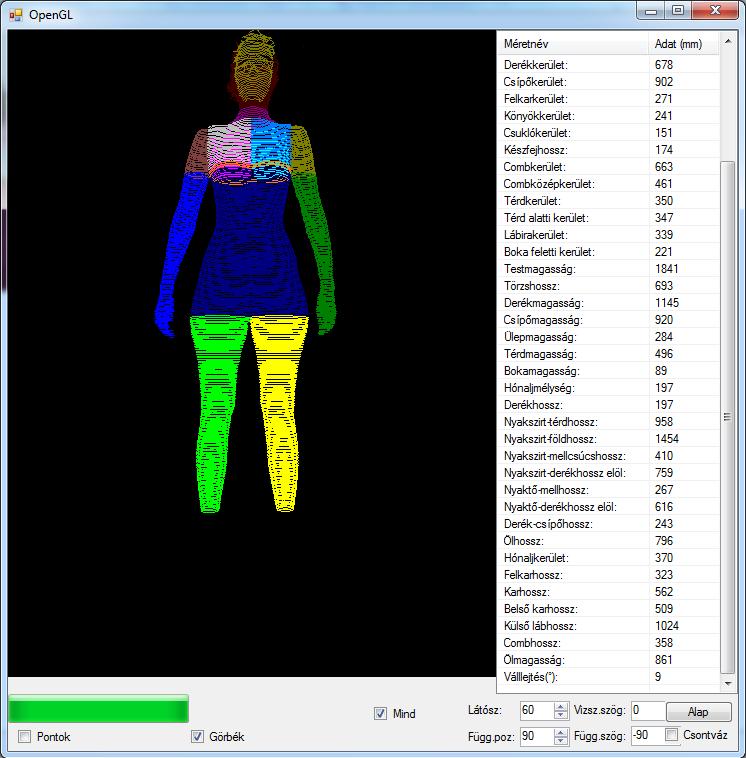
97 Képek információinak feldolgozása (3D) Példa : Az emberi test adatainak mérése 3D letapogatóval A mérési elv 97
98 98

99 . Pozíció-meghatározás síkban.. A sík-sík perspektíva bijekció Iteráció y O O x D A O η ζ O A C P C B 99
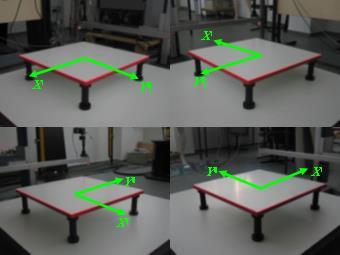
100 . Kalibráció


 ( N k k n i i k n i i k i")
101 A piros kiszűrése után statisztikai osztályozás + súlypontok Regressziós Fourier-görbék a súlyponti koordinátarendszerben (Fourier-transzformált) i b i a a R n i i n i i sin cos ) ( N k k n i i k n i i k i b i a a R min sin cos.3 Kontúrok keresése
102 3
103 3 A térlátás Pinhole (tűlyuk) kamera modell Intrinsic: A kamera belső felépítését leíró paraméterek. Extrinsic: A kamera világbeli helyzetét leíró paraméterek. 3. Intrinsic paraméterek Fókusztávolság: fx, fy (nem négyzet pixel) Optikai középpont (principle point): c x, c y Lencsetorzítás: Radiális: k, k, k 3 (paraméterek - hordó, vagy párna torzítást. ) Tangenciális: p, p a lencse nem lesz teljesen párhuzamos a képsíkkal 4
104 / / Z Y Z X c f c f y y x x y y x x f c y ŷ f c x xˆ A leképezés: A pixel koordináták: y x r r k r k r k ŷ dr r k r k r k xˆ dr y x Radiális torzítás: Tangenciális torzítás: y x p y r p dp x r p xy p dp y x ˆˆ ˆ ˆ ˆˆ y y x x dp dr y y dp dr x x ˆ ~ ˆ ~ A koordináták: ξ η x y z P P k C P x P y P xy O Π x Π y s f OC 5
 z z z y y y x x x w v u w v u w v u R z y x t t t t Pozíció: t a")
105 3. Extrinsic paraméterek Orientáció: R a kamera világbeli nézeti iránya. (bázistranszformációval) z z z y y y x x x w v u w v u w v u R z y x t t t t Pozíció: t a kamera világbeli pozíciója 6
 ) A kamera-paraméterek becslése.")
 Lehetséges kamera karakterisztikák bool findchessboardcorners(inputarray image, Size patternsize, OutputArray corners, int flags=calib_cb_adaptive_thresh + CALIB_CB_NORMALIZE_IMAGE ) A")
106 3.3 Epipoláris geometria double calibratecamera(inputarrayofarrays objectpoints, InputArrayOfArrays imagepoints, Size imagesize, InputOutputArray cameramatrix, InputOutputArray distcoeffs, OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs, int flags=, TermCriteria criteria=termcriteria( TermCriteria::COUNT+TermCriteria::EPS, 3, DBL_EPSILON) ) A kamera-paraméterek becslése. void calibrationmatrixvalues(inputarray cameramatrix, Size imagesize, double aperturewidth, double apertureheight, double& fovx, double& fovy, double& focallength, Pointd& principalpoint, double& aspectratio) Lehetséges kamera karakterisztikák bool findchessboardcorners(inputarray image, Size patternsize, OutputArray corners, int flags=calib_cb_adaptive_thresh + CALIB_CB_NORMALIZE_IMAGE ) A sakktábla sarkok void cornersubpix(inputarray image, InputOutputArray corners, Size winsize, Size zerozone, TermCriteria criteria) A sakktábla sarkok pontosítása void computecorrespondepilines(inputarray points, int whichimage, InputArray F, OutputArray lines) Epipoláris egyenes 7
Egy (k) küszöb esetén [0, 1] intenzitástartományt feltételezve (v 2 v 2 ):
![Egy (k) küszöb esetén [0, 1] intenzitástartományt feltételezve (v 2 v 2 ):](/thumbs/91/107527414.jpg "Egy (k) küszöb esetén [0, 1] intenzitástartományt feltételezve (v 2 v 2 ):") A kép (I) intenzitástartományt folytonos tartományokra osztjuk. Az eredményképen minden egyes tartományhoz egyetlen (egyedi) értéket rendelünk. Egy (k) küszöb esetén [0, 1] intenzitástartományt feltételezve
A kép (I) intenzitástartományt folytonos tartományokra osztjuk. Az eredményképen minden egyes tartományhoz egyetlen (egyedi) értéket rendelünk. Egy (k) küszöb esetén [0, 1] intenzitástartományt feltételezve
Él: a képfüggvény hirtelen változása. Típusai. Felvételeken zajos formában jelennek meg. Lépcsős
 Él: a képfüggvény hirtelen változása Típusai Lépcsős Rámpaszerű Tetőszerű Vonalszerű él Felvételeken zajos formában jelennek meg Adott pontbeli x ill. y irányú változás jellemezhető egy f folytonos képfüggvény
Él: a képfüggvény hirtelen változása Típusai Lépcsős Rámpaszerű Tetőszerű Vonalszerű él Felvételeken zajos formában jelennek meg Adott pontbeli x ill. y irányú változás jellemezhető egy f folytonos képfüggvény
7. Régió alapú szegmentálás
 Digitális képek szegmentálása 7. Régió alapú szegmentálás Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Szegmentálási kritériumok Particionáljuk a képet az alábbi kritériumokat kielégítő régiókba
Digitális képek szegmentálása 7. Régió alapú szegmentálás Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Szegmentálási kritériumok Particionáljuk a képet az alábbi kritériumokat kielégítő régiókba
Számítástechnika II. BMEKOKAA Előadás. Dr. Bécsi Tamás
 Számítástechnika II. BMEKOKAA153 4. Előadás Dr. Bécsi Tamás A RadioButton komponens Tulajdonságok: bool Checked Állapotjelző két állapot esetén: (true: bejelölve,false: nem bejelölve) Események: Esemény
Számítástechnika II. BMEKOKAA153 4. Előadás Dr. Bécsi Tamás A RadioButton komponens Tulajdonságok: bool Checked Állapotjelző két állapot esetén: (true: bejelölve,false: nem bejelölve) Események: Esemény
Az objektum leírására szolgálnak. Mire jók? Sokszor maga a jellemző az érdekes: Tömörítés. Objektumok csoportosítására
 Az objektum leírására szolgálnak Mire jók? Sokszor maga a jellemző az érdekes: pl.: átlagosan mekkora egy szitakötő szárnyfesztávolsága? Tömörítés pl.: ha körszerű objektumokat tartalmaz a kép, elegendő
Az objektum leírására szolgálnak Mire jók? Sokszor maga a jellemző az érdekes: pl.: átlagosan mekkora egy szitakötő szárnyfesztávolsága? Tömörítés pl.: ha körszerű objektumokat tartalmaz a kép, elegendő
Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján. Típusok: felügyelt és felügyelet nélküli tanuló eljárások
 Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján Típusok: felügyelt és felügyelet nélküli tanuló eljárások Különbség: előbbinél szükséges egy olyan tanulóhalmaz, ahol ismert a minták
Minták automatikus osztályba sorolása a mintát leíró jellemzők alapján Típusok: felügyelt és felügyelet nélküli tanuló eljárások Különbség: előbbinél szükséges egy olyan tanulóhalmaz, ahol ismert a minták
GPU Lab. 14. fejezet. OpenCL textúra használat. Grafikus Processzorok Tudományos Célú Programozása. Berényi Dániel Nagy-Egri Máté Ferenc
 14. fejezet OpenCL textúra használat Grafikus Processzorok Tudományos Célú Programozása Textúrák A textúrák 1, 2, vagy 3D-s tömbök kifejezetten szín információk tárolására Főbb különbségek a bufferekhez
14. fejezet OpenCL textúra használat Grafikus Processzorok Tudományos Célú Programozása Textúrák A textúrák 1, 2, vagy 3D-s tömbök kifejezetten szín információk tárolására Főbb különbségek a bufferekhez
Szürke árnyalat: R=G=B. OPENCV: BGR Mátrix típus: CV_8UC3 Pont típus: img.at<vec3b>(i, j) Tartomány: R, G, B [0, 255]
![Szürke árnyalat: R=G=B. OPENCV: BGR Mátrix típus: CV_8UC3 Pont típus: img.at<vec3b>(i, j) Tartomány: R, G, B [0, 255]](/thumbs/92/108587263.jpg "Szürke árnyalat: R=G=B. OPENCV: BGR Mátrix típus: CV_8UC3 Pont típus: img.at<vec3b>(i, j) Tartomány: R, G, B [0, 255]") Additív színmodell: piros, zöld, kék keverése RGB hullámhossz:700nm, 546nm, 435nm Elektronikai eszközök alkalmazzák: kijelzők, kamerák 16 millió szín kódolható Szürke árnyalat: R=G=B OPENCV: BGR Mátrix
Additív színmodell: piros, zöld, kék keverése RGB hullámhossz:700nm, 546nm, 435nm Elektronikai eszközök alkalmazzák: kijelzők, kamerák 16 millió szín kódolható Szürke árnyalat: R=G=B OPENCV: BGR Mátrix
Szürke árnyalat: R=G=B. OPENCV: BGR Mátrix típus: CV_8UC3 Pont típus: img.at<vec3b>(i, j) Tartomány: R, G, B [0, 255]
![Szürke árnyalat: R=G=B. OPENCV: BGR Mátrix típus: CV_8UC3 Pont típus: img.at<vec3b>(i, j) Tartomány: R, G, B [0, 255]](/thumbs/92/108290996.jpg "Szürke árnyalat: R=G=B. OPENCV: BGR Mátrix típus: CV_8UC3 Pont típus: img.at<vec3b>(i, j) Tartomány: R, G, B [0, 255]") Additív színmodell: piros, zöld, kék keverése RGB hullámhossz:700nm, 546nm, 435nm Elektronikai eszközök alkalmazzák: kijelzők, kamerák 16 millió szín kódolható Szürke árnyalat: R=G=B OPENCV: BGR Mátrix
Additív színmodell: piros, zöld, kék keverése RGB hullámhossz:700nm, 546nm, 435nm Elektronikai eszközök alkalmazzák: kijelzők, kamerák 16 millió szín kódolható Szürke árnyalat: R=G=B OPENCV: BGR Mátrix
Képfeldolgozás jól párhuzamosítható
 Képfeldolgozás jól párhuzamosítható B. Wilkinson, M. Allen: Parallel Programming, Pearson Education Prentice Hall, 2nd ed., 2005. könyv 12. fejezete alapján Vázlat A képfeldolgozás olyan alkalmazási terület,
Képfeldolgozás jól párhuzamosítható B. Wilkinson, M. Allen: Parallel Programming, Pearson Education Prentice Hall, 2nd ed., 2005. könyv 12. fejezete alapján Vázlat A képfeldolgozás olyan alkalmazási terület,
Lényege: valamilyen szempont szerint homogén csoportok képzése a pixelekből. Amit már ismerünk:
 Lényege: valamilyen szempont szerint homogén csoportok képzése a pixelekből. Amit már ismerünk: Küszöbölés, vágás, sávkijelölés hátránya: az azonos csoportba sorolt pixelek nem feltétlenül alkotnak összefüggő
Lényege: valamilyen szempont szerint homogén csoportok képzése a pixelekből. Amit már ismerünk: Küszöbölés, vágás, sávkijelölés hátránya: az azonos csoportba sorolt pixelek nem feltétlenül alkotnak összefüggő
3. Szűrés képtérben. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 3. Szűrés képtérben Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Kép transzformációk típusai Kép értékkészletének radiometriai információ
3. Szűrés képtérben Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE http://www.inf.u-szeged.hu/~kato/teaching/ 2 Kép transzformációk típusai Kép értékkészletének radiometriai információ
Programozás II. 2. Dr. Iványi Péter
 Programozás II. 2. Dr. Iványi Péter 1 C++ Bjarne Stroustrup, Bell Laboratórium Első implementáció, 1983 Kezdetben csak precompiler volt C++ konstrukciót C-re fordította A kiterjesztés alapján ismerte fel:.cpp.cc.c
Programozás II. 2. Dr. Iványi Péter 1 C++ Bjarne Stroustrup, Bell Laboratórium Első implementáció, 1983 Kezdetben csak precompiler volt C++ konstrukciót C-re fordította A kiterjesztés alapján ismerte fel:.cpp.cc.c
Sergyán Szabolcs szeptember 21.
 Éldetektálás Sergyán Szabolcs Budapesti Műszaki Főiskola Neumann János Informatikai Kar 2009. szeptember 21. Sergyán Sz. (BMF NIK) Éldetektálás 2009. szeptember 21. 1 / 28 Mit nevezünk élnek? Intuitív
Éldetektálás Sergyán Szabolcs Budapesti Műszaki Főiskola Neumann János Informatikai Kar 2009. szeptember 21. Sergyán Sz. (BMF NIK) Éldetektálás 2009. szeptember 21. 1 / 28 Mit nevezünk élnek? Intuitív
Programozás II. 4. Dr. Iványi Péter
 Programozás II. 4. Dr. Iványi Péter 1 inline függvények Bizonyos függvények annyira rövidek, hogy nem biztos hogy a fordító függvényhívást fordít, hanem inkább az adott sorba beilleszti a kódot. #include
Programozás II. 4. Dr. Iványi Péter 1 inline függvények Bizonyos függvények annyira rövidek, hogy nem biztos hogy a fordító függvényhívást fordít, hanem inkább az adott sorba beilleszti a kódot. #include
Képszerkesztés elméleti kérdések
 Képszerkesztés elméleti kérdések 1. A... egyedi alkotó elemek, amelyek együttesen formálnak egy képet.(pixelek) a. Pixelek b. Paletták c. Grafikák d. Gammák 2. Az alábbiak közül melyik nem színmodell?
Képszerkesztés elméleti kérdések 1. A... egyedi alkotó elemek, amelyek együttesen formálnak egy képet.(pixelek) a. Pixelek b. Paletták c. Grafikák d. Gammák 2. Az alábbiak közül melyik nem színmodell?
117. AA Megoldó Alfréd AA 117.
 Programozás alapjai 2. (inf.) pót-pótzárthelyi 2011.05.26. gyak. hiányzás: kzhpont: MEG123 IB.028/117. NZH:0 PZH:n Minden beadandó megoldását a feladatlapra, a feladat után írja! A megoldások során feltételezheti,
Programozás alapjai 2. (inf.) pót-pótzárthelyi 2011.05.26. gyak. hiányzás: kzhpont: MEG123 IB.028/117. NZH:0 PZH:n Minden beadandó megoldását a feladatlapra, a feladat után írja! A megoldások során feltételezheti,
Példák jellemzőkre: - minden pixelérték egy jellemző pl. neurális hálózat esetében csak kis képekre, nem invariáns sem a megvilágításra, sem a geom.
 Lépések 1. tanító és teszt halmaz összeállítása / megszerzése 2. jellemzők kinyerése 3. tanító eljárás választása Sok vagy kevés adat áll-e rendelkezésünkre? Mennyi tanítási idő/memória áll rendelkezésre?
Lépések 1. tanító és teszt halmaz összeállítása / megszerzése 2. jellemzők kinyerése 3. tanító eljárás választása Sok vagy kevés adat áll-e rendelkezésünkre? Mennyi tanítási idő/memória áll rendelkezésre?
Informatika terméktervezőknek
 Informatika terméktervezőknek C# alapok Névterület (namespace) using Osztály (class) és Obejtumok Metódus (function, procedure, method) main() static void string[] arg Szintaxis // /* */ \n \t Névadások
Informatika terméktervezőknek C# alapok Névterület (namespace) using Osztály (class) és Obejtumok Metódus (function, procedure, method) main() static void string[] arg Szintaxis // /* */ \n \t Névadások
Digitális képek szegmentálása. 5. Textúra. Kató Zoltán.
 Digitális képek szegmentálása 5. Textúra Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Textúra fogalma Sklansky: Egy képen egy területnek állandó textúrája van ha a lokális statisztikák vagy
Digitális képek szegmentálása 5. Textúra Kató Zoltán http://www.cab.u-szeged.hu/~kato/segmentation/ Textúra fogalma Sklansky: Egy képen egy területnek állandó textúrája van ha a lokális statisztikák vagy
1. Alapok. Programozás II
 1. Alapok Programozás II Elérhetőség Név: Smidla József Elérhetőség: smidla dcs.uni-pannon.hu Szoba: I916 2 Irodalom Bjarne Stroustrup: A C++ programozási nyelv 3 Irodalom Erich Gamma, Richard Helm, Ralph
1. Alapok Programozás II Elérhetőség Név: Smidla József Elérhetőség: smidla dcs.uni-pannon.hu Szoba: I916 2 Irodalom Bjarne Stroustrup: A C++ programozási nyelv 3 Irodalom Erich Gamma, Richard Helm, Ralph
Képszerkesztés elméleti feladatainak kérdései és válaszai
 Képszerkesztés elméleti feladatainak kérdései és válaszai 1. A... egyedi alkotóelemek, amelyek együttesen formálnak egy képet. Helyettesítse be a pixelek paletták grafikák gammák Helyes válasz: pixelek
Képszerkesztés elméleti feladatainak kérdései és válaszai 1. A... egyedi alkotóelemek, amelyek együttesen formálnak egy képet. Helyettesítse be a pixelek paletták grafikák gammák Helyes válasz: pixelek
Képfeldolgozás jól párhuzamosítható
 Képeldolgozás jól párhuzamosítható B. Wilkinson, M. Allen: Parallel Programming, Pearson Education Prentice Hall, nd ed., 005. könyv. ejezete alapján Vázlat A képeldolgozás olyan alkalmazási terület, amely
Képeldolgozás jól párhuzamosítható B. Wilkinson, M. Allen: Parallel Programming, Pearson Education Prentice Hall, nd ed., 005. könyv. ejezete alapján Vázlat A képeldolgozás olyan alkalmazási terület, amely
Számítástechnika II. BMEKOKAA Előadás. Dr. Bécsi Tamás
 Számítástechnika II. BMEKOKAA153 2. Előadás Dr. Bécsi Tamás Tömbök (Arrays) Definíció: típus[] név; (pld. int[] szamok; ) Inicializálás: int[] szamok = new int[4]; int[] szamok = 1,2,4,3,5}; int[] szamok
Számítástechnika II. BMEKOKAA153 2. Előadás Dr. Bécsi Tamás Tömbök (Arrays) Definíció: típus[] név; (pld. int[] szamok; ) Inicializálás: int[] szamok = new int[4]; int[] szamok = 1,2,4,3,5}; int[] szamok
9. Szegmentálás. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 9. Szegmentálás Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Szegmentálás célja Partícionáljuk a képet koherens objektumokra Nincs egzakt
9. Szegmentálás Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Szegmentálás célja Partícionáljuk a képet koherens objektumokra Nincs egzakt
Információ megjelenítés Számítógépes ábrázolás. Dr. Iványi Péter
 Információ megjelenítés Számítógépes ábrázolás Dr. Iványi Péter Raszterizáció OpenGL Mely pixelek vannak a primitíven belül fragment generálása minden ilyen pixelre Attribútumok (pl., szín) hozzárendelése
Információ megjelenítés Számítógépes ábrázolás Dr. Iványi Péter Raszterizáció OpenGL Mely pixelek vannak a primitíven belül fragment generálása minden ilyen pixelre Attribútumok (pl., szín) hozzárendelése
BME MOGI Gépészeti informatika 6.
 BME MOGI Gépészeti informatika 6. 1. feladat Készítsen Windows Forms alkalmazást véletlen adatokkal létrehozott körök kölcsönös helyzetének vizsgálatára! Hozza létre a következő struktúrákat, melynek elemei
BME MOGI Gépészeti informatika 6. 1. feladat Készítsen Windows Forms alkalmazást véletlen adatokkal létrehozott körök kölcsönös helyzetének vizsgálatára! Hozza létre a következő struktúrákat, melynek elemei
C# nyelv alapjai. Krizsán Zoltán 1. Objektumorientált programozás C# alapokon tananyag. Általános Informatikai Tanszék Miskolci Egyetem
 C# nyelv alapjai Krizsán Zoltán 1 Általános Informatikai Tanszék Miskolci Egyetem Objektumorientált programozás C# alapokon tananyag Tartalom Bevezetés Lokális változó Utasítások Szójáték Why do all real
C# nyelv alapjai Krizsán Zoltán 1 Általános Informatikai Tanszék Miskolci Egyetem Objektumorientált programozás C# alapokon tananyag Tartalom Bevezetés Lokális változó Utasítások Szójáték Why do all real
Maximum kiválasztás tömbben
 ELEMI ALKALMAZÁSOK FEJLESZTÉSE I. Maximum kiválasztás tömbben Készítette: Szabóné Nacsa Rozália Gregorics Tibor tömb létrehozási módozatok maximum kiválasztás kódolása for ciklus adatellenőrzés do-while
ELEMI ALKALMAZÁSOK FEJLESZTÉSE I. Maximum kiválasztás tömbben Készítette: Szabóné Nacsa Rozália Gregorics Tibor tömb létrehozási módozatok maximum kiválasztás kódolása for ciklus adatellenőrzés do-while
Tartalomjegyzék. Általános Információ! 2. Felhasználói dokumentáció! 3. Feladat! 3. Környezet! 3. Használat! 3. Bemenet! 3. Példa!
 Tartalomjegyzék Általános Információ! 2 Felhasználói dokumentáció! 3 Feladat! 3 Környezet! 3 Használat! 3 Bemenet! 3 Példa! 3 A program eredménye! 3 Példa! 3 Hibalehetőségek! 3 Példa! 3 Fejlesztői dokumentáció!
Tartalomjegyzék Általános Információ! 2 Felhasználói dokumentáció! 3 Feladat! 3 Környezet! 3 Használat! 3 Bemenet! 3 Példa! 3 A program eredménye! 3 Példa! 3 Hibalehetőségek! 3 Példa! 3 Fejlesztői dokumentáció!
Képszegmentáló eljárások. Orvosi képdiagnosztika 2018 ősz
 Képszegmentáló eljárások Orvosi képdiagnosztika 2018 ősz Képszegmentálás Anatómiai részek elkülönítés: pl. csontok, szív, erek, szürkefehér állomány, stb Vizsgálandó terület körbehatárolása: pl. tüdőterület
Képszegmentáló eljárások Orvosi képdiagnosztika 2018 ősz Képszegmentálás Anatómiai részek elkülönítés: pl. csontok, szív, erek, szürkefehér állomány, stb Vizsgálandó terület körbehatárolása: pl. tüdőterület
Képszerkesztés. Letölthető mintafeladatok gyakorláshoz: Minta teszt 1 Minta teszt 2. A modul célja
 Képszerkesztés Letölthető mintafeladatok gyakorláshoz: Minta teszt 1 Minta teszt 2 A modul célja Az ECDL Képszerkesztés alapfokú követelményrendszerben (Syllabus 1.0) a vizsgázónak értenie kell a digitális
Képszerkesztés Letölthető mintafeladatok gyakorláshoz: Minta teszt 1 Minta teszt 2 A modul célja Az ECDL Képszerkesztés alapfokú követelményrendszerben (Syllabus 1.0) a vizsgázónak értenie kell a digitális
Közösség detektálás gráfokban
 Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Közösség detektálás gráfokban Önszervező rendszerek Hegedűs István Célkitűzés: valamilyen objektumok halmaza felett minták, csoportok detektálása csakis az egyedek közötti kapcsolatok struktúrájának a
Mechatronika és mikroszámítógépek 2017/2018 I. félév. Bevezetés a C nyelvbe
 Mechatronika és mikroszámítógépek 2017/2018 I. félév Bevezetés a C nyelvbe A C programozási nyelv A C egy általános célú programozási nyelv, melyet Dennis Ritchie fejlesztett ki Ken Thompson segítségével
Mechatronika és mikroszámítógépek 2017/2018 I. félév Bevezetés a C nyelvbe A C programozási nyelv A C egy általános célú programozási nyelv, melyet Dennis Ritchie fejlesztett ki Ken Thompson segítségével
A C programozási nyelv I. Bevezetés
 A C programozási nyelv I. Bevezetés Miskolci Egyetem Általános Informatikai Tanszék A C programozási nyelv I. (bevezetés) CBEV1 / 1 A C nyelv története Dennis M. Ritchie AT&T Lab., 1972 rendszerprogramozás,
A C programozási nyelv I. Bevezetés Miskolci Egyetem Általános Informatikai Tanszék A C programozási nyelv I. (bevezetés) CBEV1 / 1 A C nyelv története Dennis M. Ritchie AT&T Lab., 1972 rendszerprogramozás,
OPENCV TELEPÍTÉSE SZÁMÍTÓGÉPES LÁTÁS ÉS KÉPFELDOLGOZÁS. Tanács Attila Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem
 OPENCV TELEPÍTÉSE SZÁMÍTÓGÉPES LÁTÁS ÉS KÉPFELDOLGOZÁS Tanács Attila Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem OpenCV Nyílt forráskódú szoftver (BSD licensz) Számítógépes látás,
OPENCV TELEPÍTÉSE SZÁMÍTÓGÉPES LÁTÁS ÉS KÉPFELDOLGOZÁS Tanács Attila Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem OpenCV Nyílt forráskódú szoftver (BSD licensz) Számítógépes látás,
Adatbányászati szemelvények MapReduce környezetben
 Adatbányászati szemelvények MapReduce környezetben Salánki Ágnes salanki@mit.bme.hu 2014.11.10. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Felügyelt
Adatbányászati szemelvények MapReduce környezetben Salánki Ágnes salanki@mit.bme.hu 2014.11.10. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Felügyelt
Számítógépes grafika. Készítette: Farkas Ildikó 2006.Január 12.
 Számítógépes grafika Készítette: Farkas Ildikó 2006.Január 12. Az emberi látás Jellegzetességei: az emberi látás térlátás A multimédia alkalmazások az emberi érzékszervek összetett használatára építenek.
Számítógépes grafika Készítette: Farkas Ildikó 2006.Január 12. Az emberi látás Jellegzetességei: az emberi látás térlátás A multimédia alkalmazások az emberi érzékszervek összetett használatára építenek.
Algoritmizálás + kódolás C++ nyelven és Pascalban
 Algoritmizálás + kódolás nyelven és ban Motiváció A Programozási alapismeretek tárgyban az algoritmizáláshoz struktogramot, a kódoláshoz nyelvet használunk, a Közismereti informatikában (a közoktatásban
Algoritmizálás + kódolás nyelven és ban Motiváció A Programozási alapismeretek tárgyban az algoritmizáláshoz struktogramot, a kódoláshoz nyelvet használunk, a Közismereti informatikában (a közoktatásban
Színes képek feldolgozása
 Palágyi Kálmán Az oktató: SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék 6720 Szeged Árpád tér 2. 214-es szoba (tetıtér) (62) 546 197 palagyi@inf.u-szeged.hu www.inf.u-szeged.hu/~palagyi Kurzusanyagok
Palágyi Kálmán Az oktató: SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék 6720 Szeged Árpád tér 2. 214-es szoba (tetıtér) (62) 546 197 palagyi@inf.u-szeged.hu www.inf.u-szeged.hu/~palagyi Kurzusanyagok
Programozás BMEKOKAA146. Dr. Bécsi Tamás 8. előadás
 Programozás BMEKOKAA146 Dr. Bécsi Tamás 8. előadás Visszatekintés A Windows Console alkalmazások egy karakteres képernyőt biztosítottak, ahol a kimenet a kiírt szöveg, míg a bemenet a billentyűzet volt.
Programozás BMEKOKAA146 Dr. Bécsi Tamás 8. előadás Visszatekintés A Windows Console alkalmazások egy karakteres képernyőt biztosítottak, ahol a kimenet a kiírt szöveg, míg a bemenet a billentyűzet volt.
Pénzügyi algoritmusok
 Pénzügyi algoritmusok A C++ programozás alapjai Folyamok kezelése Fájlok írása/olvasása Folyamok kezelése Szabvány folyamok Eddig Kiírás a szöveges konzolra:
Pénzügyi algoritmusok A C++ programozás alapjai Folyamok kezelése Fájlok írása/olvasása Folyamok kezelése Szabvány folyamok Eddig Kiírás a szöveges konzolra:
C++ programozási nyelv Konstruktorok-destruktorok
 C++ programozási nyelv Konstruktorok-destruktorok Nyugat-Magyarországi Egyetem Faipari Mérnöki Kar Informatikai Intézet Soós Sándor 2004. szeptember A C++ programozási nyelv Soós Sándor 1/20 Tartalomjegyzék
C++ programozási nyelv Konstruktorok-destruktorok Nyugat-Magyarországi Egyetem Faipari Mérnöki Kar Informatikai Intézet Soós Sándor 2004. szeptember A C++ programozási nyelv Soós Sándor 1/20 Tartalomjegyzék
Access adatbázis elérése OLE DB-n keresztül
 Access adatbázis elérése OLE DB-n keresztül Készítsünk egy grafikus felülető alkalmazást, ami lehetıvé teszi egy Access adatbázisban tárolt hallgatói adatok (EHA, Név, e-mail cím) lekérdezését (összes
Access adatbázis elérése OLE DB-n keresztül Készítsünk egy grafikus felülető alkalmazást, ami lehetıvé teszi egy Access adatbázisban tárolt hallgatói adatok (EHA, Név, e-mail cím) lekérdezését (összes
Programozás II gyakorlat. 8. Operátor túlterhelés
 Programozás II gyakorlat 8. Operátor túlterhelés Kezdő feladat Írjunk egy Vector osztályt, amely n db double értéket tárol. A konstruktor kapja meg az elemek számát. Írj egy set(int idx, double v) függvényt,
Programozás II gyakorlat 8. Operátor túlterhelés Kezdő feladat Írjunk egy Vector osztályt, amely n db double értéket tárol. A konstruktor kapja meg az elemek számát. Írj egy set(int idx, double v) függvényt,
Képfeldolgozó eljárások áttekintés. Orvosi képdiagnosztika
 Képfeldolgozó eljárások áttekintés Orvosi képdiagnosztika Tartalomjegyzék Képmanipulációs eljárások Képjavítás (kontraszt módosítás, intenzitásviszonyok módosításahisztogram módosítás, zajszűrés) Képelemzés
Képfeldolgozó eljárások áttekintés Orvosi képdiagnosztika Tartalomjegyzék Képmanipulációs eljárások Képjavítás (kontraszt módosítás, intenzitásviszonyok módosításahisztogram módosítás, zajszűrés) Képelemzés
Számítástechnika II. BMEKOKAA Előadás. Dr. Bécsi Tamás
 Számítástechnika II. BMEKOKAA153 1. Előadás Dr. Bécsi Tamás Bemutatkozás Előadó: Dr. Bécsi Tamás St.106, (1)463-1044, becsi.tamas@mail.bme.hu Közlekedés-, és Járműirányítási Tanszék www.kjit.bme.hu A tantárgyi
Számítástechnika II. BMEKOKAA153 1. Előadás Dr. Bécsi Tamás Bemutatkozás Előadó: Dr. Bécsi Tamás St.106, (1)463-1044, becsi.tamas@mail.bme.hu Közlekedés-, és Járműirányítási Tanszék www.kjit.bme.hu A tantárgyi
A C programozási nyelv I. Bevezetés
 A C programozási nyelv I. Bevezetés Miskolci Egyetem Általános Informatikai Tanszék A C programozási nyelv I. (bevezetés) CBEV1 / 1 A C nyelv története Dennis M. Ritchie AT&T Lab., 1972 rendszerprogramozás,
A C programozási nyelv I. Bevezetés Miskolci Egyetem Általános Informatikai Tanszék A C programozási nyelv I. (bevezetés) CBEV1 / 1 A C nyelv története Dennis M. Ritchie AT&T Lab., 1972 rendszerprogramozás,
Programozás C nyelven (3. ELŐADÁS) Sapientia EMTE
 Sapientia EMTE") Programozás C nyelven (3. ELŐADÁS) Sapientia EMTE 2015-16 Classic Empire - A turn Based Wargame Classic Empire is a real time, multiplayer, Internet-based game, featuring military, diplomatic, and economic
Programozás C nyelven (3. ELŐADÁS) Sapientia EMTE 2015-16 Classic Empire - A turn Based Wargame Classic Empire is a real time, multiplayer, Internet-based game, featuring military, diplomatic, and economic
Területi primitívek: Zárt görbék által határolt területek (pl. kör, ellipszis, poligon) b) Minden belső pont kirajzolásával (kitöltött)
 b) Minden belső pont kirajzolásával (kitöltött)") Grafikus primitívek kitöltése Téglalap kitöltése Poligon kitöltése Kör, ellipszis kitöltése Kitöltés mintával Grafikus primitívek kitöltése Területi primitívek: Zárt görbék által határolt területek (pl.
Grafikus primitívek kitöltése Téglalap kitöltése Poligon kitöltése Kör, ellipszis kitöltése Kitöltés mintával Grafikus primitívek kitöltése Területi primitívek: Zárt görbék által határolt területek (pl.
INFORMATIKA tétel 2018
 INFORMATIKA tétel 2018 ELIGAZÍTÁS: 1 pont hivatalból; Az 1-4 feladatokban (a pszeudokód programrészletekben): (1) a kiír \n utasítás újsorba ugratja a képernyőn a kurzort; (2) a minden i = n,1,-1 végezd
INFORMATIKA tétel 2018 ELIGAZÍTÁS: 1 pont hivatalból; Az 1-4 feladatokban (a pszeudokód programrészletekben): (1) a kiír \n utasítás újsorba ugratja a képernyőn a kurzort; (2) a minden i = n,1,-1 végezd
Eseményvezérelt alkalmazások fejlesztése II 3. előadás. Windows Forms dinamikus felhasználói felület, elemi grafika
 Eötvös Loránd Tudományegyetem Informatikai Kar Eseményvezérelt alkalmazások fejlesztése II 3. előadás Windows Forms dinamikus felhasználói felület, elemi grafika 2015 Giachetta Roberto groberto@inf.elte.hu
Eötvös Loránd Tudományegyetem Informatikai Kar Eseményvezérelt alkalmazások fejlesztése II 3. előadás Windows Forms dinamikus felhasználói felület, elemi grafika 2015 Giachetta Roberto groberto@inf.elte.hu
Képrekonstrukció 3. előadás
 Képrekonstrukció 3. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Computed Tomography (CT) Elv: Röntgen-sugarak áthatolása 3D objektum 3D térfogati kép Mérések
Képrekonstrukció 3. előadás Balázs Péter Képfeldolgozás és Számítógépes Grafika Tanszék Szegedi Tudományegyetem Computed Tomography (CT) Elv: Röntgen-sugarak áthatolása 3D objektum 3D térfogati kép Mérések
Szövegek C++ -ban, a string osztály
 Szövegek C++ -ban, a string osztály A string osztály a Szabványos C++ könyvtár (Standard Template Library) része és bár az objektum-orientált programozásról, az osztályokról, csak később esik szó, a string
Szövegek C++ -ban, a string osztály A string osztály a Szabványos C++ könyvtár (Standard Template Library) része és bár az objektum-orientált programozásról, az osztályokról, csak később esik szó, a string
Algoritmusok raszteres grafikához
 Algoritmusok raszteres grafikához Egyenes rajzolása Kör rajzolása Ellipszis rajzolása Algoritmusok raszteres grafikához Feladat: Grafikai primitíveket (pl. vonalat, síkidomot) ábrázolni kép-mátrixszal,
Algoritmusok raszteres grafikához Egyenes rajzolása Kör rajzolása Ellipszis rajzolása Algoritmusok raszteres grafikához Feladat: Grafikai primitíveket (pl. vonalat, síkidomot) ábrázolni kép-mátrixszal,
Programozás 6. Dr. Iványi Péter
 Programozás 6. Dr. Iványi Péter 1 Előfeldolgozás része Makrók A forrás kódban elvégzi a helyettesítéseket a fordító Csak egyszer végez helyettesítést Nem olyan makrók, mint a LISP vagy Scheme esetén Csak
Programozás 6. Dr. Iványi Péter 1 Előfeldolgozás része Makrók A forrás kódban elvégzi a helyettesítéseket a fordító Csak egyszer végez helyettesítést Nem olyan makrók, mint a LISP vagy Scheme esetén Csak
Pontműveletek. Sergyán Szabolcs Óbudai Egyetem Neumann János Informatikai Kar február 20.
 Pontműveletek Sergyán Szabolcs sergyan.szabolcs@nik.uni-obuda.hu Óbudai Egyetem Neumann János Informatikai Kar 2012. február 20. Sergyán (OE NIK) Pontműveletek 2012. február 20. 1 / 40 Felhasznált irodalom
Pontműveletek Sergyán Szabolcs sergyan.szabolcs@nik.uni-obuda.hu Óbudai Egyetem Neumann János Informatikai Kar 2012. február 20. Sergyán (OE NIK) Pontműveletek 2012. február 20. 1 / 40 Felhasznált irodalom
C# osztályok. Krizsán Zoltán
 C# osztályok Krizsán Zoltán Fogalma Önálló hatáskőrrel rendelkező, absztrakt adattípus, amely több, különböző elemet tartalmazhat. Minden esetben a heap-en jön létre! A programozó hozza létre, de a GC
C# osztályok Krizsán Zoltán Fogalma Önálló hatáskőrrel rendelkező, absztrakt adattípus, amely több, különböző elemet tartalmazhat. Minden esetben a heap-en jön létre! A programozó hozza létre, de a GC
1. ábra. 24B-19 feladat
 . gyakorlat.. Feladat: (HN 4B-9) A +Q töltés egy hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld.. ábra.). Számítsuk ki az E elektromos térerősséget a vonal. ábra. 4B-9 feladat irányában lévő,
. gyakorlat.. Feladat: (HN 4B-9) A +Q töltés egy hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld.. ábra.). Számítsuk ki az E elektromos térerősséget a vonal. ábra. 4B-9 feladat irányában lévő,
Kivételkezelés a C++ nyelvben Bevezetés
 Kivételkezelés a C++ nyelvben Bevezetés Miskolci Egyetem Általános Informatikai Tanszék Kivételkezelés a C++ nyelvben CPP9 / 1 Hagyományos hibakezelés Függvény visszatérési értéke (paramétere) hátrányai:
Kivételkezelés a C++ nyelvben Bevezetés Miskolci Egyetem Általános Informatikai Tanszék Kivételkezelés a C++ nyelvben CPP9 / 1 Hagyományos hibakezelés Függvény visszatérési értéke (paramétere) hátrányai:
Programozási nyelvek I. 5. előadás (Gregorics Tibor anyagának felhasználásával)
") Programozási nyelvek I. 5. előadás (Gregorics Tibor anyagának felhasználásával) I. A nyelv története C++ C (ős: B???) 1972 Ritchie AT&T Bell laboratórium UNIX 1978 Kernighan & Ritchie az első tankönyv,
Programozási nyelvek I. 5. előadás (Gregorics Tibor anyagának felhasználásával) I. A nyelv története C++ C (ős: B???) 1972 Ritchie AT&T Bell laboratórium UNIX 1978 Kernighan & Ritchie az első tankönyv,
Bevezetés a programozásba Előadás: Objektumszintű és osztályszintű elemek, hibakezelés
 Bevezetés a programozásba 2 7. Előadás: Objektumszű és osztályszű elemek, hibakezelés ISMÉTLÉS Osztály class Particle { public: Particle( X, X, Y); virtual void mozog( ); ); virtual void rajzol( ) const;
Bevezetés a programozásba 2 7. Előadás: Objektumszű és osztályszű elemek, hibakezelés ISMÉTLÉS Osztály class Particle { public: Particle( X, X, Y); virtual void mozog( ); ); virtual void rajzol( ) const;
A keretrendszer. A linuxos keretrendszer az eredeti alapján készült (nagyrészt C++-ban), ezért nagyjából azzal azonos funkcionalitásokkal rendelkezik.
, ezért nagyjából azzal azonos funkcionalitásokkal rendelkezik.") A keretrendszer A linuxos keretrendszer az eredeti alapján készült (nagyrészt C++-ban), ezért nagyjából azzal azonos funkcionalitásokkal rendelkezik. Fordítás és futtatás A futtatáshoz elengedhetetlen,
A keretrendszer A linuxos keretrendszer az eredeti alapján készült (nagyrészt C++-ban), ezért nagyjából azzal azonos funkcionalitásokkal rendelkezik. Fordítás és futtatás A futtatáshoz elengedhetetlen,
Bevezetés a programozásba I 10. gyakorlat. C++: alprogramok deklarációja és paraméterátadása
 Pázmány Péter Katolikus Egyetem Információs Technológiai Kar Bevezetés a programozásba I 10. gyakorlat C++: alprogramok deklarációja és paraméterátadása 2011.11.22. Giachetta Roberto groberto@inf.elte.hu
Pázmány Péter Katolikus Egyetem Információs Technológiai Kar Bevezetés a programozásba I 10. gyakorlat C++: alprogramok deklarációja és paraméterátadása 2011.11.22. Giachetta Roberto groberto@inf.elte.hu
Pénzügyi algoritmusok
 Pénzügyi algoritmusok A C++ programozás alapjai Az Integrált Fejlesztői Környezet C++ alapok Az Integrált Fejlesztői Környezet Visual Studio 2013 Community Edition Kitekintés: fordítás Preprocesszor Fordító
Pénzügyi algoritmusok A C++ programozás alapjai Az Integrált Fejlesztői Környezet C++ alapok Az Integrált Fejlesztői Környezet Visual Studio 2013 Community Edition Kitekintés: fordítás Preprocesszor Fordító
Képfeldolgozás haladóknak Lovag Tamás Novák Gábor 2011
 Dokumentáció Küszöbölés A küszöbölés során végighaladunk a képen és minden egyes képpont intenzitásáról eldöntjük, hogy teljesül-e rá az a küszöbölési feltétel. A teljes képre vonatkozó küszöbölés esetében
Dokumentáció Küszöbölés A küszöbölés során végighaladunk a képen és minden egyes képpont intenzitásáról eldöntjük, hogy teljesül-e rá az a küszöbölési feltétel. A teljes képre vonatkozó küszöbölés esetében
Programozás BMEKOKAA146. Dr. Bécsi Tamás 1. Előadás
 Programozás BMEKOKAA146 Dr. Bécsi Tamás 1. Előadás Bemutatkozás Előadó: Dr. Bécsi Tamás St.106, (1)463-1044, becsi.tamas@mail.bme.hu Közlekedés-, és Járműirányítási Tanszék www.kjit.bme.hu Programozás
Programozás BMEKOKAA146 Dr. Bécsi Tamás 1. Előadás Bemutatkozás Előadó: Dr. Bécsi Tamás St.106, (1)463-1044, becsi.tamas@mail.bme.hu Közlekedés-, és Járműirányítási Tanszék www.kjit.bme.hu Programozás
Programozás C++ -ban 2007/4
 Programozás C++ -ban 2007/4 1. Az adatokhoz való hozzáférés ellenőrzése Egy C programban a struktúrák minden része mindig elérhető. Ugyanakkor ez nem a legkedvezőbb helyzet. Több szempontból is hasznos
Programozás C++ -ban 2007/4 1. Az adatokhoz való hozzáférés ellenőrzése Egy C programban a struktúrák minden része mindig elérhető. Ugyanakkor ez nem a legkedvezőbb helyzet. Több szempontból is hasznos
Bevezetés Kiíratás Beolvasás Formázás Fájlkezelés Gyakorló feladatok C++ I/O. Bevezetés. Izsó Tamás február 20. Izsó Tamás C++ I/O / 1
 C++ I/O Bevezetés Izsó Tamás 2014. február 20. Izsó Tamás C++ I/O / 1 Section 1 Bevezetés Izsó Tamás C++ I/O / 2 Irodalom Izsó Tamás C++ I/O / 3 Paraméter illesztés függvénynév túlterhelés esetén 1 Pontos
C++ I/O Bevezetés Izsó Tamás 2014. február 20. Izsó Tamás C++ I/O / 1 Section 1 Bevezetés Izsó Tamás C++ I/O / 2 Irodalom Izsó Tamás C++ I/O / 3 Paraméter illesztés függvénynév túlterhelés esetén 1 Pontos
Képfeldolgozás és párhuzamosíthatóság
 Többszálú, többmagos architektúrák és programozásuk Óbudai Egyetem, Neumann János Informatikai Kar Képfeldolgozás és párhuzamosíthatóság A képfeldolgozás olyan alkalmazási terület, amely számos lehetőséget
Többszálú, többmagos architektúrák és programozásuk Óbudai Egyetem, Neumann János Informatikai Kar Képfeldolgozás és párhuzamosíthatóság A képfeldolgozás olyan alkalmazási terület, amely számos lehetőséget
A +Q töltés egy L hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld ábra ábra
 . Gyakorlat 4B-9 A +Q töltés egy L hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld. 4-6 ábra.). Számítsuk ki az E elektromos térerősséget a vonal irányában lévő, annak.. ábra. 4-6 ábra végpontjától
. Gyakorlat 4B-9 A +Q töltés egy L hosszúságú egyenes szakasz mentén oszlik el egyenletesen (ld. 4-6 ábra.). Számítsuk ki az E elektromos térerősséget a vonal irányában lévő, annak.. ábra. 4-6 ábra végpontjától
Bevezetés a programozásba. 8. Előadás: Függvények 2.
 Bevezetés a programozásba 8. Előadás: Függvények 2. ISMÉTLÉS Helló #include using namespace std; int main() cout
Bevezetés a programozásba 8. Előadás: Függvények 2. ISMÉTLÉS Helló #include using namespace std; int main() cout
2. Pont operációk. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 2. Pont operációk Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Kép transzformációk típusai Kép értékkészletének (radiometriai információ)
2. Pont operációk Kató Zoltán Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/) 2 Kép transzformációk típusai Kép értékkészletének (radiometriai információ)
C#, OOP. Osztályok tervezése C#-ban
 C#, OOP Osztályok tervezése C#-ban OOP Létrehozás (creating) Megszüntetés (destroying) Túlterhelés (overlading) Felsorolás típus (enumerated types) 2 Hajó osztály Sailboat class using System; class Sailboat
C#, OOP Osztályok tervezése C#-ban OOP Létrehozás (creating) Megszüntetés (destroying) Túlterhelés (overlading) Felsorolás típus (enumerated types) 2 Hajó osztály Sailboat class using System; class Sailboat
Regresszió. Csorba János. Nagyméretű adathalmazok kezelése március 31.
 Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Regresszió Csorba János Nagyméretű adathalmazok kezelése 2010. március 31. A feladat X magyarázó attribútumok halmaza Y magyarázandó attribútumok) Kérdés: f : X -> Y a kapcsolat pár tanítópontban ismert
Információs Technológia
 Információs Technológia A C programozási nyelv (Típusok és operátorok) Fodor Attila Pannon Egyetem Műszaki Informatika Kar Villamosmérnöki és Információs Rendszerek Tanszék foa@almos.vein.hu 2010 szeptember
Információs Technológia A C programozási nyelv (Típusok és operátorok) Fodor Attila Pannon Egyetem Műszaki Informatika Kar Villamosmérnöki és Információs Rendszerek Tanszék foa@almos.vein.hu 2010 szeptember
C programozás. 6 óra Függvények, függvényszerű makrók, globális és
 C programozás 6 óra Függvények, függvényszerű makrók, globális és lokális változók 1.Azonosítók A program bizonyos összetevőire névvel (azonosító) hivatkozunk Első karakter: _ vagy betű (csak ez lehet,
C programozás 6 óra Függvények, függvényszerű makrók, globális és lokális változók 1.Azonosítók A program bizonyos összetevőire névvel (azonosító) hivatkozunk Első karakter: _ vagy betű (csak ez lehet,
5. Gyakorlat. struct diak {
 Rövid elméleti összefoglaló 5. Gyakorlat Felhasználó által definiált adattípusok: A typedef egy speciális tárolási osztály, mellyel érvényes típusokhoz szinonim nevet rendelhetünk. typedef létező_típus
Rövid elméleti összefoglaló 5. Gyakorlat Felhasználó által definiált adattípusok: A typedef egy speciális tárolási osztály, mellyel érvényes típusokhoz szinonim nevet rendelhetünk. typedef létező_típus
Keresés képi jellemzők alapján. Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék
 Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
Keresés képi jellemzők alapján Dr. Balázs Péter SZTE, Képfeldolgozás és Számítógépes Grafika Tanszék Lusta gépi tanulási algoritmusok Osztályozás: k=1: piros k=5: kék k-legközelebbi szomszéd (k=1,3,5,7)
Programozás C- és Matlab nyelven C programozás kurzus BMEKOKAM603 Függvények. Dr. Bécsi Tamás 6. Előadás
 Programozás C- és Matlab nyelven C programozás kurzus BMEKOKAM603 Függvények Dr. Bécsi Tamás 6. Előadás Bevezetés Egy idő után az egyetlen main(){ függvénnyel megírt programunk túl nagy méretű lesz. Vannak
Programozás C- és Matlab nyelven C programozás kurzus BMEKOKAM603 Függvények Dr. Bécsi Tamás 6. Előadás Bevezetés Egy idő után az egyetlen main(){ függvénnyel megírt programunk túl nagy méretű lesz. Vannak
Objektumorientált programozás C# nyelven
 Objektumorientált programozás C# nyelven 1. rész Osztályok és objektumok Mezık és metódusok Konstruktor és destruktor Névterek és hatókörök Láthatósági szintek Osztály szintő tagok Beágyazott osztályok
Objektumorientált programozás C# nyelven 1. rész Osztályok és objektumok Mezık és metódusok Konstruktor és destruktor Névterek és hatókörök Láthatósági szintek Osztály szintő tagok Beágyazott osztályok
INFORMATIKA javítókulcs 2016
 INFORMATIKA javítókulcs 2016 ELMÉLETI TÉTEL: Járd körbe a tömb fogalmát (Pascal vagy C/C++): definíció, egy-, két-, több-dimenziós tömbök, kezdőértékadás definíciókor, tömb típusú paraméterek átadása alprogramoknak.
INFORMATIKA javítókulcs 2016 ELMÉLETI TÉTEL: Járd körbe a tömb fogalmát (Pascal vagy C/C++): definíció, egy-, két-, több-dimenziós tömbök, kezdőértékadás definíciókor, tömb típusú paraméterek átadása alprogramoknak.
KÉPFELDOLGOZÁS. 10. gyakorlat: Morfológiai műveletek, alakjellemzők
 KÉPFELDOLGOZÁS 10. gyakorlat: Morfológiai műveletek, alakjellemzők Min-max szűrők MATLAB-ban SE = strel(alak, paraméter(ek)); szerkesztőelem generálása strel( square, w): négyzet alakú, w méretű strel(
KÉPFELDOLGOZÁS 10. gyakorlat: Morfológiai műveletek, alakjellemzők Min-max szűrők MATLAB-ban SE = strel(alak, paraméter(ek)); szerkesztőelem generálása strel( square, w): négyzet alakú, w méretű strel(
Pénzügyi algoritmusok
 Pénzügyi algoritmusok A C++ programozás alapjai Tömbök (3. rész) Konstansok Kivételkezelés Tömbök 3. Többdimenziós tömbök Többdimenziós tömbök int a; Többdimenziós tömbök int a[5]; Többdimenziós tömbök
Pénzügyi algoritmusok A C++ programozás alapjai Tömbök (3. rész) Konstansok Kivételkezelés Tömbök 3. Többdimenziós tömbök Többdimenziós tömbök int a; Többdimenziós tömbök int a[5]; Többdimenziós tömbök
Dinamikus csatolású függvénykönyvtár készítése és használata Plugin-szerű betöltés Egyszeű C++ osztályok készítése
 FEJLETT PROGRAMOZÁSI NYELVEK, 2009 2. GYAKORLAT - Linux alatti C/C++ programozás Cél: Dinamikus csatolású függvénykönyvtár készítése és használata Plugin-szerű betöltés Egyszeű C++ osztályok készítése
FEJLETT PROGRAMOZÁSI NYELVEK, 2009 2. GYAKORLAT - Linux alatti C/C++ programozás Cél: Dinamikus csatolású függvénykönyvtár készítése és használata Plugin-szerű betöltés Egyszeű C++ osztályok készítése
Grafikus csővezeték és az OpenGL függvénykönyvtár
 Grafikus csővezeték és az OpenGL függvénykönyvtár 1 / 32 A grafikus csővezeték 3D-s színtér objektumainak leírása primitívekkel: pontok, élek, poligonok. Primitívek szögpontjait vertexeknek nevezzük Adott
Grafikus csővezeték és az OpenGL függvénykönyvtár 1 / 32 A grafikus csővezeték 3D-s színtér objektumainak leírása primitívekkel: pontok, élek, poligonok. Primitívek szögpontjait vertexeknek nevezzük Adott
3D Grafika+képszintézis
 D Grafikaképsintéis P . Computer Integrated Manufacturing (Beveetés ea. CAD ADATOK CAQ CAPP CAP CAM CAE Computer Aided Design Computer Aided Manufacturing Computer Aided Engineering Computer Aided Processing
D Grafikaképsintéis P . Computer Integrated Manufacturing (Beveetés ea. CAD ADATOK CAQ CAPP CAP CAM CAE Computer Aided Design Computer Aided Manufacturing Computer Aided Engineering Computer Aided Processing
Képfeldolgozás Szegmentálás Osztályozás Képfelismerés Térbeli rekonstrukció
 Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
Mesterséges látás Miről lesz szó? objektumok Bevezetés objektumok A mesterséges látás jelenlegi, technikai eszközökön alapuló világunkban gyakorlatilag azonos a számítógépes képfeldolgozással. Számítógépes
Bevezetés a programozásba I.
 Bevezetés a programozásba I. 9. gyakorlat Intelligens tömbök, mátrixok, függvények Surányi Márton PPKE-ITK 2010.11.09. C++-ban van lehetőség (statikus) tömbök használatára ezeknek a méretét fordítási időben
Bevezetés a programozásba I. 9. gyakorlat Intelligens tömbök, mátrixok, függvények Surányi Márton PPKE-ITK 2010.11.09. C++-ban van lehetőség (statikus) tömbök használatára ezeknek a méretét fordítási időben
Programozás I. 3. gyakorlat. Szegedi Tudományegyetem Természettudományi és Informatikai Kar
 Programozás I. 3. gyakorlat Szegedi Tudományegyetem Természettudományi és Informatikai Kar Antal Gábor 1 Primitív típusok Típus neve Érték Alap érték Foglalt tár Intervallum byte Előjeles egész 0 8 bit
Programozás I. 3. gyakorlat Szegedi Tudományegyetem Természettudományi és Informatikai Kar Antal Gábor 1 Primitív típusok Típus neve Érték Alap érték Foglalt tár Intervallum byte Előjeles egész 0 8 bit
Csoportosítás. Térinformatikai műveletek, elemzések. Csoportosítás. Csoportosítás
 Csoportosítás Térinformatikai műveletek, elemzések Leíró (attribútum) adatokra vonatkozó kérdések, műveletek, elemzések, csoportosítások,... Térbeli (geometriai) adatokra vonatkozó kérdések, műveletek
Csoportosítás Térinformatikai műveletek, elemzések Leíró (attribútum) adatokra vonatkozó kérdések, műveletek, elemzések, csoportosítások,... Térbeli (geometriai) adatokra vonatkozó kérdések, műveletek
Bevezetés a programozásba. 9. Előadás: Rekordok
 Bevezetés a programozásba 9. Előadás: Rekordok ISMÉTLÉS Függvényhívás #include #include #include #include using using namespace namespace std; std; double double terulet(double
Bevezetés a programozásba 9. Előadás: Rekordok ISMÉTLÉS Függvényhívás #include #include #include #include using using namespace namespace std; std; double double terulet(double
BME MOGI Gépészeti informatika 1.
 BME MOGI Gépészeti informatika 1. 1. feladat Végezze el a következő feladatokat! Olvassa be a nevét és írjon üdvözlő szöveget a képernyőre! Generáljon két 1-100 közötti egész számot, és írassa ki a hányadosukat
BME MOGI Gépészeti informatika 1. 1. feladat Végezze el a következő feladatokat! Olvassa be a nevét és írjon üdvözlő szöveget a képernyőre! Generáljon két 1-100 közötti egész számot, és írassa ki a hányadosukat
BME MOGI Gépészeti informatika 5.
 BME MOGI Gépészeti informatika 5. 1. feladat Készítsen alkalmazást, mely feltölt egy egydimenziós tömböt adott tartományba eső, véletlenszerűen generált egész értékekkel! Határozza meg a legkisebb és a
BME MOGI Gépészeti informatika 5. 1. feladat Készítsen alkalmazást, mely feltölt egy egydimenziós tömböt adott tartományba eső, véletlenszerűen generált egész értékekkel! Határozza meg a legkisebb és a
3. Határozza meg és írja ki a minta szerint, hogy a forrásállományban hány kémiai elem felfedezési adatai
 Kémiai elemek felfedezése A kémiai elemek kémiailag tovább már nem bontható, egyszerű anyagok. Jelenleg 118 különböző kémiai elemet ismerünk, közüliik a Földön 94 található meg a természetben, ezeket természetes
Kémiai elemek felfedezése A kémiai elemek kémiailag tovább már nem bontható, egyszerű anyagok. Jelenleg 118 különböző kémiai elemet ismerünk, közüliik a Földön 94 található meg a természetben, ezeket természetes
Johanyák Zsolt Csaba: Ugráló gomb oktatási segédlet Copyright 2008 Johanyák Zsolt Csaba
 Ugráló gomb Készítsünk egy egyszerű játékprogramot, ami egy mozgó nyomógombot tartalmaz. A nyomógomb beállított ideig marad egy helyben, majd az ablakon számára elhatárolt terület (panel) egy véletlenszerűen
Ugráló gomb Készítsünk egy egyszerű játékprogramot, ami egy mozgó nyomógombot tartalmaz. A nyomógomb beállított ideig marad egy helyben, majd az ablakon számára elhatárolt terület (panel) egy véletlenszerűen
Bevezetés a programozásba II. 5. Előadás: Másoló konstruktor, túlterhelés, operátorok
 Bevezetés a programozásba II 5. Előadás: Másoló konstruktor, túlterhelés, operátorok Emlékeztető struct Vektor { int meret, *mut; Vektor(int meret); int szamlal(int mit); }; int Vektor::szamlal(int mit)
Bevezetés a programozásba II 5. Előadás: Másoló konstruktor, túlterhelés, operátorok Emlékeztető struct Vektor { int meret, *mut; Vektor(int meret); int szamlal(int mit); }; int Vektor::szamlal(int mit)
6. Éldetektálás. Kató Zoltán. Képfeldolgozás és Számítógépes Grafika tanszék SZTE (http://www.inf.u-szeged.hu/~kato/teaching/)
") 6. Éldetektálás Kató Zoltán Képeldolgozás és Számítógépes Graika tanszék SZTE (http://www.in.u-szeged.hu/~kato/teaching/) 2 Élek A képen ott található él, ahol a kép-üggvény hirtelen változik. A kép egy
6. Éldetektálás Kató Zoltán Képeldolgozás és Számítógépes Graika tanszék SZTE (http://www.in.u-szeged.hu/~kato/teaching/) 2 Élek A képen ott található él, ahol a kép-üggvény hirtelen változik. A kép egy
Mérési adatgyűjtés és adatfeldolgozás 2. előadás
 Mérési adatgyűjtés és adatfeldolgozás 2. előadás BME TTK Fizika Tanszék 2011/2012 tavaszi félév Copyright 2008-2009 Geresdi Attila, Halbritter András Számítógépes mérésvezérlés Az előző rész tartalmából
Mérési adatgyűjtés és adatfeldolgozás 2. előadás BME TTK Fizika Tanszék 2011/2012 tavaszi félév Copyright 2008-2009 Geresdi Attila, Halbritter András Számítógépes mérésvezérlés Az előző rész tartalmából
Programozási alapismeretek :: beadandó feladat. Felhasználói dokumentáció. Molnár Tamás MOTIABT.ELTE motiabt@inf.elte.
 Programozási alapismeretek :: beadandó feladat Készítő adatai Név: Molnár Tamás EHA: MOTIABT.ELTE E-mail cím: motiabt@inf.elte.hu Gyakorlatvezető: Horváth László Feladat sorszáma: 23. Felhasználói dokumentáció
Programozási alapismeretek :: beadandó feladat Készítő adatai Név: Molnár Tamás EHA: MOTIABT.ELTE E-mail cím: motiabt@inf.elte.hu Gyakorlatvezető: Horváth László Feladat sorszáma: 23. Felhasználói dokumentáció