GPS/INS mérések térinformatikai elemzése
|
|
|
- Egon Fábián
- 8 évvel ezelőtt
- Látták:
Átírás
1 Budapesti Műszaki és Gazdaságtudományi Egyetem, Építőmérnöki Kar évi Tudományos Diákköri Konferencia GPS/INS mérések térinformatikai elemzése Szerző: Kertész Imre: építőmérnök hallgató Konzulens: Dr. Barsi Árpád, egyetemi docens, tanszékvezető, BME Fotogrammetria és Térinformatika Tanszék Tartalom: A kutatás célja az volt, hogy megállapítsuk a GPS+INS műszerpárosról, alkalmazhatóak-e Mobil Térképező Rendszerekben való használatra. Vizsgáltuk még, hogy egy önálló IMU műszerrel összehasonlítva a GPS+INS párost, milyen különbségeket figyelhetünk meg. Ehhez 6 mérés adatai álltak rendelkezésre. Összehasonlításra kerültek a műszerek által mért szögadatok. Vizsgáltuk azt is, hogy az IMU-val végzett fluxus mérések hogyan alakulnak az egyes útvonalakon. Imre Kertész: Geoinformatical analysis of GPS/INS measurements Abstract: The goal of the research was to evaluate the potential of GPS+INS instrument in mobile mapping systems. Furthermore the differences between a standalone IMU and a complex GPS/INS equipment were studied. 6 measurement campaigns were applied for the tests. The registered angle data were compared. The magnetic field (flux) was studied along several paths. WWW proceedings of the Scientific Student Conference, Budapest University of Technology and Economics, Faculty of Civil Engineering, 2005 (in Hungarian), Budapest, november 11.

2 GPS/INS MÉRÉSEK TÉRINFORMATIKAI ELEMZÉSE TDK DOLGOZAT Konzulens: Dr. Barsi Árpád egyetemi docens, tanszékvezető Fotogrammetria és Térinformatika Tsz. Készítette: Kertész Imre

3 TARTALOMJEGYZÉK 1. Bevezetés Felhasznált műszerek NAV420CA AHRS400CB Mérési adatok rögzítésére használt szoftverek Mérések Mért adatok elemzése Mérési eredmények Műszerek működési frekvenciájának vizsgálata EOV koordináták Interpoláció Mérési eredmények közvetlen összehasonlítása Fluxus vizsgálat Úthullámosság Konklúzió Irodalomjegyzék Melléklet Mérési útvonalak Hossz-szelvények

4 1. BEVEZETÉS Ezen TDK legfőbb feladatának azt tartottuk, hogy megvizsgáljuk milyen adatok nyerhetőek egy GPS+INS (Inertial Navigation System) műszerpárossal, valamint, hogy alkalmasak-e Mobil Térképező Rendszerbe (Mobile Mapping System) való integrálásra. Vizsgálatra került még, hogy milyen eredmények érhetőek el csak IMU (Inertial Measurement Unit: gyorsulást és szögváltozást mérő eszköz) használatával. (Az INS egy olyan IMU, amely valamilyen feldolgozó modullal van ellátva pl. Kálmán-szűrő). Fontos kihangsúlyozni, hogy az INS műszerek gyártója (lsd. a műszerek ismertetésénél) a low-end kategória képviselője (az eszközök ára $), így az eredményeket ennek tükrében kell figyelembe venni. 2. FELHASZNÁLT MŰSZEREK Az adatgyűjtés során 2 különböző műszer került alkalmazásra, melyek típusai a következők: NAV420CA-100, AHRS400CB (a műszerek részletes bemutatása a 2.1 és 2.2 fejezetekben). Mindkét műszer az amerikai Crossbow cég terméke. A mérés során egy vezérlő számítógépre is szükség volt, ezt a szerepet egy Acer laptop töltötte be. Mint később majd látható, mindkét eszköz 15 tűs csatlakozóval van ellátva, ezek segítségével soros porton keresztül tudnak kommunikálni a számítógéppel és ez keresztül történik az áramellátás is. A mérések során nehézséget okozott, hogy az alkalmazott számítógép csak egy soros portot tartalmazott, így közvetlenül csak egy műszert tudott fogadni. A másik műszer csatlakoztatásához egy soros port USB port átalakítót kellett alkalmazni, így mindkét eszköz adatait egy időben tudta feldolgozni. Az áramellátást szivargyújtóhoz csatlakozó transzformátor biztosította, amely 12 V-os feszültséget szolgáltatott mindkét műszer számára. Mivel mindkét eszköz akkor indul, mikor a transzformátort bekapcsolják, biztosított, hogy a két műszer kezdő időpontja egybeesik (mérési eredmények összehasonlításánál nagyon fontos). 2.1 ábra: Eszközök rögzítése A 2.1 ábrán látható, hogy a műszerek egy masszív rétegelt lemezre lettek lecsavarozva, így biztosítva azt, hogy egymáshoz képest teljesen mozdulatlanok legyenek
. Fontos kihangsúlyozni, hogy az INS műszerek gyártója (lsd.")
5 2.1 NAV420CA-100 A műszer méretei: 7,62*9,53*7,62 cm (2.2 ábra). Üzemi feszültsége 8-42 V-ig terjedhet. Működési frekvenciája 100 Hz, tömege 580 g. 2.2 ábra: NAV420CA-100 Az eszköz GPS antenna fogadására alkalmas (az antenna csatlakozási helye jól látható a kép bal oldalán), amit a megvásárlás során mellékelnek is hozzá. A GPS vevőről annyit lehet tudni, hogy 4 Hz-es, egyéb adatot a gyártó nem közöl. A műszer koordináta rendszere nem a geodéziában megszokott módon áll, hanem a 2.3 ábrán látható módon. A menetiránnyal párhuzamos az X-tengely, az Y-tengely pozitív oldala keleti irányba mutat, a Z-tengely pozitív oldala nadír irányba mutat. 2.3 ábra: A műszer koordináta rendszere - 3 -

6 A műszer három mérési módot ismer, ezek a következők: Scaled sensor mode, Angle mode és Nav mode. A 2.1 táblázatban látható, hogy az egyes módok során milyen mennyiségek mérésére képes az eszköz. Scaled sensor mode Angle mode Nav mode X irányú gyorsulás Roll érték Roll érték Y irányú gyorsulás Pitch érték Pitch érték Z irányú gyorsulás Yaw érték Yaw érték Roll változás Roll változás Roll változás Pitch változás Pitch változás Pitch változás Yaw változás Yaw változás Yaw változás X irányú mágneses fluxus X irányú gyorsulás X irányú sebesség Y irányú mágneses fluxus Y irányú gyorsulás Y irányú sebesség Z irányú mágneses fluxus Z irányú gyorsulás Z irányú sebesség X irányú hőmérséklet X irányú mágneses fluxus Ell. hosszúság Y irányú hőmérséklet Y irányú mágneses fluxus Ell. Szélesség Z irányú hőmérséklet Z irányú mágneses fluxus Ell. feletti magasság CPU felületi hőmérséklet Hőmérséklet 2.1 táblázat Érdemes megemlíteni, hogy csak Nav mode-ban képes pozíció adatokat rögzíteni, ezért ennél a projektnél ez a mód került használatra. A pozíció adatok rögzítésénél Kálmánszűrőt is használ a műszer, a szűrő paramétereiről azonban a gyártó sehol nem tesz említést. A mérési eredmények alapján, amint azt később látni lehet (4. fejezet), azonban okunk van kételkedni a szűrés megfelelő működésében (a pozíció adatok, főleg a magassági, hirtelen nagy változása alapján arra lehet következtetni, hogy a Kálmán-szűrés nem működik kielégítően). 2.2 AHRS400CB A műszer méretei: 7,62*9,53*10,42 cm (2.4 ábra). Üzemi feszültsége 9-30 V-ig terjedhet. Működési frekvenciája a gyártó szerint 56 Hz, tömege ~770 g. 2.4 ábra: AHRS400CB - 4 -

7 Ez az eszköz szintén három mérési módot ismer: Angle mode, Scaled sensor mode és Voltage mode. A mérési módok során mért mennyiségeket a 2.2 táblázat mutatja. Koordináta rendszere (2.3 ábra) ugyanaz, mint az előző fejezetben látott NAV420CA- 100-é. A projekt során Angle mode-ban volt használva a műszert. Angle mode Scaled sensor mode Voltage mode Roll érték Roll változás Roll érték Pitch érték Pitch változás Pitch érték Yaw érték Yaw változás Yaw érték Roll változás X irányú gyorsulás X irányú gyorsulás Pitch változás Y irányú gyorsulás Y irányú gyorsulás Yaw változás Z irányú gyorsulás Z irányú gyorsulás X irányú gyorsulás X irányú mágneses fluxus X irányú mágneses fluxus Y irányú gyorsulás Y irányú mágneses fluxus Y irányú mágneses fluxus Z irányú gyorsulás Z irányú mágneses fluxus Z irányú mágneses fluxus X irányú mágneses fluxus Hőmérséklet Hőmérséklet Y irányú mágneses fluxus Z irányú mágneses fluxus Hőmérséklet 2.2 táblázat 2.3 Mérési adatok rögzítésére használt szoftverek Mindkét műszer saját szoftverrel rendelkezett, a NAV420CA-100-as vezérlése Nav- View, az AHRS400CB vezérlése Gyro-View szoftverrel történt. A 2.5 ábrán a Navview és a Gyro-view szoftverek felhasználói felülete látható, amint egyszerre futnak. A szoftverek National Instruments Labviewban íródtak. 2.5 ábra: Nav-view és Gyro-view - 5 -

8 Mindkét program képes megjeleníteni az aktuális mérési eredményeket grafikonon és számszerűleg, valamint ezek Fourier transzformáltját. A műszerek irányítására saját fejlesztésű program is használható, mert a gyártó megadta a műszerek vezérléséhez használható parancsok listáját. A saját szoftver előnye az, hogy a két műszer egy programon belül vezérelhető, így a mérések is egyszerre indíthatóak. Készül a Fotogrammetria és Térinformatika Tanszéken is egy vezérlő szoftver, de a TDK készítésének időpontjában nem állt rendelkezésre semmilyen működő verzió. 3. MÉRÉSEK Összesen 6 mérés történt Budapest úthálózatán. 4 mérés a Szentendrei úton, valamint 2 mérés a közelben található Auchan áruház mögött. A 3.1 ábrán, 1: es méretarányú topográfiai térképen ábrázolva, láthatóak az útvonalak (a 7.1 mellékletben megtalálható az összes útvonal részletes térképe). A műszereket és a laptopot egy hétköznapi Opel Astra személygépkocsi hordozta. A mérések időpontja az esti órákra esett (21 és 23 óra közé), hogy a nagy forgalom zavaró hatásai kevésbé érvényesüljenek. 3.1 ábra: Mérési útvonalak A mérések során mind a két műszer párhuzamosan rögzített adatokat, így azok a mennyiségek, amelyeket mindkettő rögzített, később összehasonlíthatóak voltak

9 4. MÉRT ADATOK ELEMZÉSE 4.1 Mérési eredmények A mérések elindítása és leállítása a két különböző műszernél egyenként, manuálisan, történt, így nem lehetett őket egy időpontban indítani. A 4.1 ábrán jól látszik, hogy a mérések milyen átfedéssel történtek. 4.1 ábra: Mérések átfedése A fájlba kiírt adatok formátuma az AHRS400-as műszernél a 4.2 ábrán látható. A NAV420-as hasonlóan néz ki, a különbség annyi, hogy ott több oszlop van (más adatokat rögzít). A fájl egy fejléccel kezdődik, ami tartalmazza a program nevét, amivel rögzítették az adatokat, a program verzióját, a műszer típusát, firmware-ének verzióját, a műszer szériaszámát, a mérés kezdetének időpontját, valamint a mért adatok mezőneveit mértékegységgel. Ezek után következnek a mérési eredmények. 4.2 ábra: Mérési adatok - 7 -

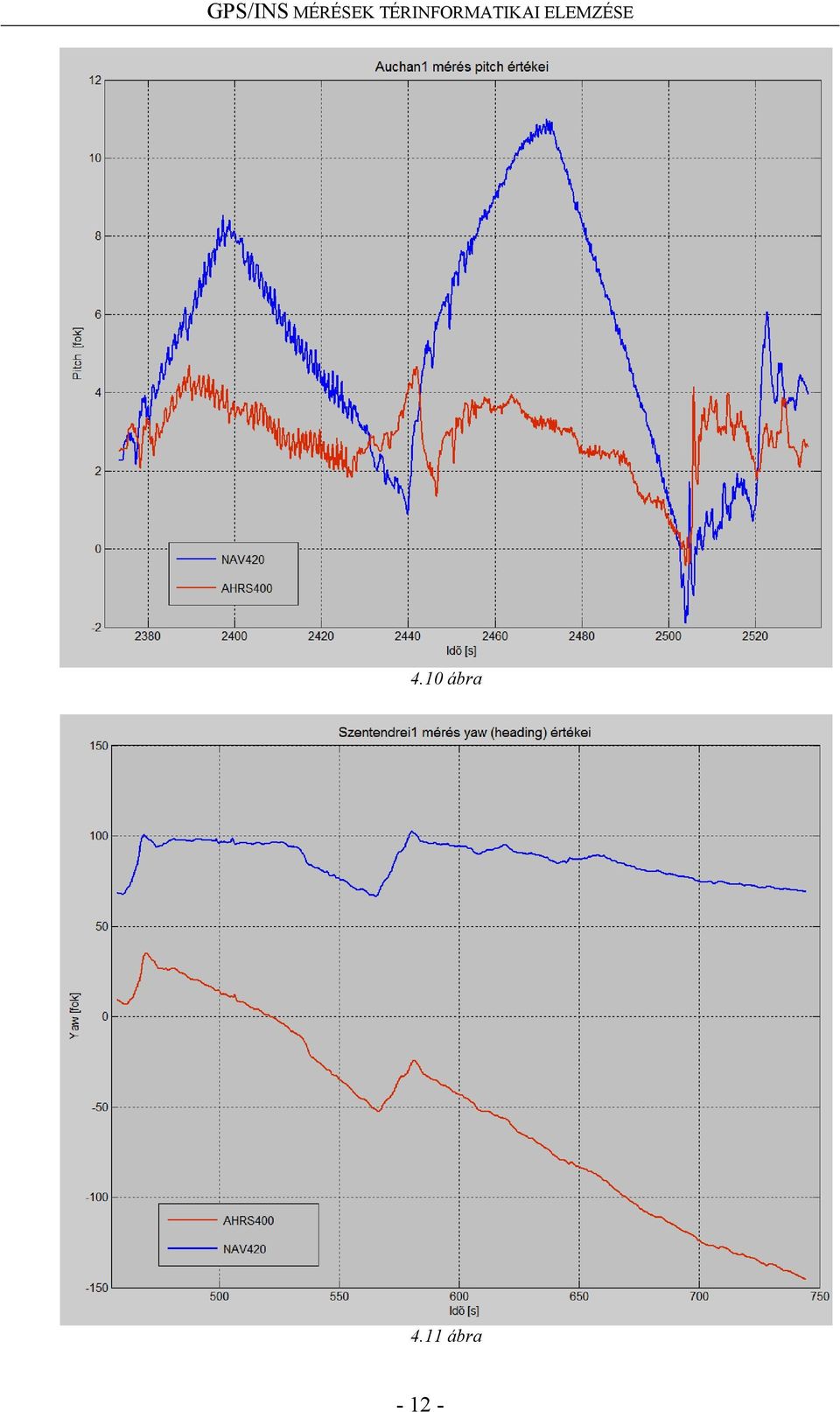
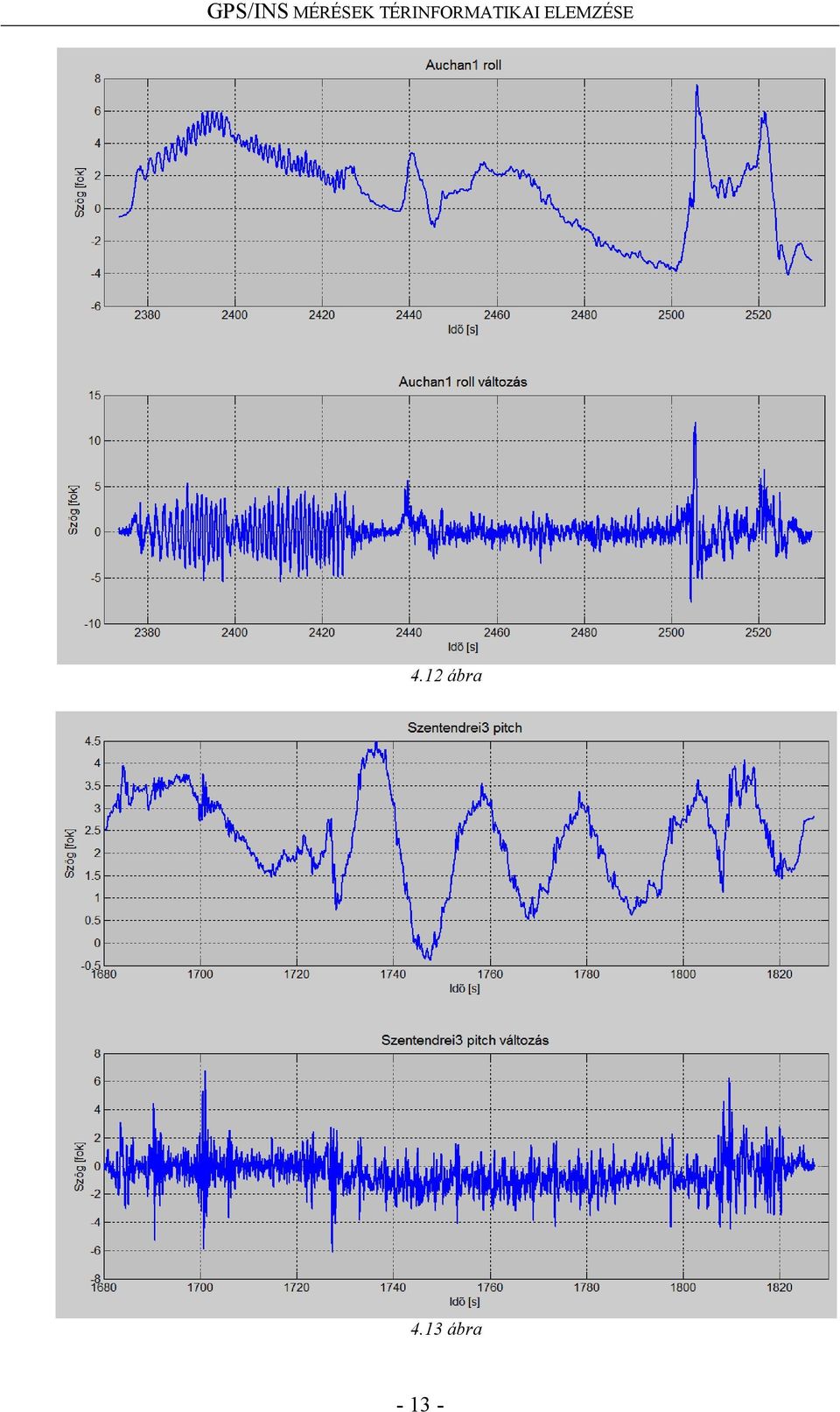
10 Az adatok feldolgozása Matlab szoftverben történt. A NAV420-as műszer hosszúság és szélesség mérési adataiból könnyedén elő lehet állítani a jármű trajektóriáját. Ezt megtehetjük az AHRS400-as műszernél is, de ott a gyorsulási adatokat kell felhasználnunk (csak a trajektória alakjának megjelenítésére jó). A 4.3 és 4.4 ábrán két mérési útvonal a NAV420 hosszúsági és szélességi, valamint az AHRS400 gyorsulási és szögadataiból számolt elmozdulások alapján megrajzolt trajektóriája látható. Mindkét ábrán látszik, hogy a gyorsulási adatokból számolt és a GPS mérésekből felrajzolt trajektória hasonlít egymásra, azonban nem egybevágóak. Az ábrázolás a többi mérésre vonatkozóan is elvégezhető, így látható a gépjármű gyorsulásából számított és valós trajektóriája. Sajnos a műszer pontatlansága miatt a gyorsulásból számított útvonalat nem lehet felhasználni semmire. A többi mérési adatot is könnyedén lehet ábrázolni az idő függvényében. A pitch értékek a gépjármű bólintását, a roll értékek a gépjármű oldalra dőlését, a yaw (heading) értékek a gépjármű elfordulását (Z tengely körül) mutatják (4.5 ábra). A mérési eredményekből látványos grafikonokat lehet előállítani, mint pl. a 4.9 ábrán látható roll grafikon, a 4.10 ábrán látható pitch grafikon és a 4.11 ábrán látható yaw (heading) grafikon. A magasságokból és koordinátákból (EOV transzformáció után) megrajzolható az útvonal magassági vonalvezetése. A 4.8 ábrán látható hossz-szelvény részleten, a jobb oldalon, a Szentendrei úton található Mozaik utcai felüljáró látható. A baloldalon látható ~35 m-es tüske a Kálmán-szűrő hibás működésére utal (a gépjármű vasúti felüljáró alatt haladt át). További hossz-szelvények a 7.2 mellékletben találhatók. A 4.6 és 4.7 ábrán a gépjármű sebesség térképe látható két különböző útvonalon. Ezeket a sebesség adatokat a GPS mérési eredményeiből számítja a program. A műszerek szögváltozás (angular rate) adatokat mérnek, így a roll, pitch és yaw értékek a mért változásokból számított adatok. A 4.12 és 4.13 ábrán a szög és a hozzá tartozó szögváltozás grafikon látható. 4.3 ábra: Szentendrei3 mérés - 8 -

11 4.4 ábra: Auchan1 mérés 4.5 ábra: Roll, pitch, yaw (heading) - 9 -

12 4.7 ábra: Sebességek, Szentendrei4 mérés 4.6 ábra: Sebességek, Szentendrei2 mérés

13 4.8 ábra: Szentendrei1 mérés hossz-szelvény részlet 4.9 ábra

14 4.10 ábra 4.11 ábra
15 4.12 ábra 4.13 ábra
16 Az előbbiek során említett adatok (a sebesség és gyorsulás kivételével), amint látható, mindkét műszernél mérésre kerültek. Ezeken kívül az AHRS400-asnál az X, Y és Z irányban mért mágneses fluxus (az erőtér egy meghatározott felületdarabján átmenő mágneses erővonalak száma) is ábrázolható (4.14 ábra), valamint ebből az eredő fluxus is számítható (4.15 ábra) ábra 4.15 ábra
 is ábrázolható (4.")
17 4.2 Műszerek működési frekvenciájának vizsgálata A két használt műszer mérési frekvenciája eltérő (AHRS400: 56 Hz, NAV420: 100 Hz), ezért fontos volt megvizsgálni, hogy a mérési időpontjaik, hogyan követik egymást, összehasonlíthatóak-e közvetlenül (vannak-e azonos időpontok), valamint, hogy a műszerek a névleges frekvencián működnek-e. A frekvencia az egymás után rögzített különböző pozíciók időkülönbségéből lett számítva. A vizsgálat során meglepő eredmény született (4.16 ábra) ábra: Hisztogramok A 4.16 ábrán jól látható, hogy az AHRS400-as műszer frekvenciája meg sem közelíti a gyártó által megadott értéket, hanem hol sűrűbben, hol ritkábban szolgáltatja az adatokat (54 és 61 Hz környékén üzemel). A NAV420 megközelítőleg a megadott, 100 Hz-es frekvencián működik ( Hz-ig). A mérések időpontja nem esik egybe a két műszernél (4.17 ábra) a különböző frekvencia miatt. Jól látható, hogy két NAV420 mérés után jön egy AHRS400 mérés, ez 3-szor ismétlődik, majd egy NAV420 mérés jön egy AHRS400 mérés után. Ez a fentebb említett okokból adódik (AHRS400 frekvencia anomália) ábra: A két műszer méréseinek sorrendje

18 A NAV420-as műszerhez GPS antenna kapcsolódott. A kérdés az, hogy a mért pozíciók milyen frekvenciával érkeznek (4 Hz-es GPS!), és mi befolyásolhatja őket. A 4.18 ábrán az összes mérési útvonalhoz tartozó frekvencia látható. Az ábrán jól látszik, hogy nagyjából a GPS vevő 4 Hz-es frekvenciájával működik a rendszer, pedig azt várnánk, hogy a Kálmán-szűrő segítségével 100 Hz-en működjön. Bizonyos helyeken a frekvencia jelentős mértékben lecsökken (a grafikonon látható nagy tüskék helyén). Példaként a 4.19 és 4.20 ábrán láthatóak, a térképen piros körrel jelölve, azok a helyek, ahol két különböző útvonalon a frekvencia lecsökkent. Ez a két mérési útvonal (Szentendrei2 és Szentendrei4) átfedi egymást, de a kiugrások helye nem egyezik meg. Bár az a képen nem látszik, de a Szentendrei2 mérésnél (felülről a második piros kör) a kiugrás helye ott van, ahol a gépjármű egy vasúti felüljáró alatt haladt át. Érdekes megemlíteni, hogy a Szentendrei1 mérés során, amikor ugyanitt haladt át a jármű, ellentétes irányban, a frekvencia ábrán az ennek megfelelő helyen semmilyen kiugrás, jelentős eltérés a 4 Hz-től, nem látható ábra: Pozíciók frekvenciája
. Példaként a 4.19 és 4.")


19 4.19 ábra: Szentendrei2 mérés 4.20 ábra: Szentendrei4 mérés 4.3 EOV koordináták A mérések során GPS segítségével WGS84 ellipszoidra vonatkozó hosszúsági, szélességi koordinátákat és ellipszoid feletti magasságokat rögzített a műszer. Ezeket a koordinátákat át kell transzformálni ahhoz, hogy a rendelkezésre álló, EOV vetületi rendszerben készült, 1: Magyarország térképen ábrázolni lehessen őket. A transzformáció egy neurális hálózaton alapuló programmal lett elvégezve. A program, a Dr. Barsi Árpád által fejlesztett, Neutra 1.1-es volt, melynek kezelő felülete a 4.21 ábrán és 4.22 ábrán látható. A program Matlab fejlesztő környezetben íródott és csak azon belül futtatható. Az indítás után a Multi Point Transformation gombra kattintva a 4.22 ábrán látható ablak fogadja a felhasználót. Itt több koordináta hármas egyszerre történő átkonvertálására van lehetőség. A felhasználó kiválasztja az input file-t, ami az átkonvertálandó középponti derékszögű koordinátákat (ellipszoidi koordinátákból számítva) tartalmazza, majd megadja az output file-t és a Transform gombra kattintva a program kiszámolja az EOV koordinátákat ábra 4.21 ábra

20 4.4 Interpoláció Amint az a 4.2 fejezetben látható volt (4.17 ábra), a két műszer mérési eredményei nem esnek azonos időpontokra, tehát közvetlenül nem hasonlíthatóak össze. Míg bizonyos időpontoknál a NAV420-nak vannak adatai, addig ugyanott az AHRS400-nak nincsenek és ez fordítva is igaz. Ahhoz, hogy az egyes időpontoknál össze lehessen hasonlítani az adatokat, interpolálni kell minden műszernél a hiányzó időpontokra. Az interpoláció legmegfelelőbb fokának és típusának meghatározása érdekében háromféle interpolációtípus került vizsgálatra. Az első egy egyszerű elsőfokú, lineáris interpoláció, a második harmadfokú polinomos, a harmadik pedig egy harmadfokú spline interpoláció. A 4.23 ábra a 4 adott és a két közbenső időpontra interpolált pontot mutatja. A 4.24 ábrán, ami a 4.23 ábrának egy kinagyított részlete, jól látható, hogy a különböző interpolációs módszerek által interpolált pontok (sárga, fekete és kék pontok) között nagyon minimális a különbség, ezért, valamint a nagy adatsűrűség miatt (másodpercenként ~100 ill. ~56 adatsor) nem érdemes lineáris interpolációnál magasabb fokút alkalmazni, így a lineáris interpoláció került alkalmazásra. Mindkét műszernél, minden mért mennyiségre, a hiányzó időpontokra, az adatok interpolálása megtörtént. Ennek segítségével lehetett például olyan adatokat is térképen ábrázolni, amit csak az AHRS400-as műszer mért (pl.: mágneses fluxus) ábra: Interpolált pontok

21 4.24 ábra 4.5 Mérési eredmények közvetlen összehasonlítása Az interpolációt követően lehetőségünk van mindenegyes mérési időpontban összehasonlítani az egyes mérési eredményeket. Így meg lehet állapítani, hogy a két műszer között milyen különbségek vannak. A 4.25 és 4.26 ábrákon a két műszer által mért roll és pitch értékek különbsége látható, minden mérésnél. Jól látszik, hogy nagy különbségek vannak a két eszköz között. A különbségek előjele változó és a görbék alakja sem egyezik meg a különböző mérések között, így nem becsülhető egyik műszer mérési eredményeiből sem a másik mérési eredménye. A különbségek nem egyenes arányban változnak az idővel. A yaw (heading) értékeknél a várható eredmény az lett volna, hogy az AHRS400-as mérési eredményei folyamatosan távolodnak az idő múlásával a NAV420-as mérési eredményeitől, hiszen a NAV420-as mérési eredményeit, a GPS által mért adatokkal, a Kálmán-szűrés javítja. Bizonyos méréseknél valóban nőtt a különbség, az idő múlásával szinte egyenes arányban (ilyen a Szentendrei1 mérés, 4.27 ábra), de volt olyan mérés, ahol csökkent a különbség (Szentendrei4 mérés, 4.28 ábra.). A két ábra azt bizonyítja, hogy a műszerek nem előrebecsülhetően működnek. A vízszintes pozíciókról elmondható, hogy az eddigi vizsgálatok alapján mobil térképező rendszerben használhatók, a magassági adatok azonban nem kellően megbízhatók. A melléklet (7. fejezet) tartalmazza az összes útvonalat, térképen ábrázolva
22 4.25 ábra: Roll különbségek 4.26 ábra: Pitch különbségek
23 4.27 ábra: Yaw különbségek, Szentendrei ábra: Yaw különbségek, Szentendrei4-21 -
24 4.6 Fluxus vizsgálat Az összes mérési útvonalon történt fluxus mérés (X, Y és Z irányú), ezeknek az eredője látható a 4.29 ábrán ábra A mágneses fluxus értékéről elmondható, hogy a mérések során 0,2 és 0,4 gauss körül mozogtak. Megfigyelhető volt az, hogy ha a gépjármű déli irányból északi irányba mozgott a fluxus értékek ~0,4-0,5 gauss értékűek voltak, míg ellenkező irányú mozgás esetén ennek az értéknek a fele ~0,2 gauss értékeket mért a műszer. Jelen pillanatban nincs magyarázata erre a jelenségre a TDK készítőjének. A mérések során két nagy kiugrás volt a fluxus értékekben, amelyek a Szentendrei1 és Szentendrei2 méréseknél figyelhetők meg. A 4.30 ábrán látható, hogy mindkét mérési útvonalon ugyanazon a helyen, a Rómaifürdő buszmegállónál nőtt meg hirtelen a fluxus. Érdekes lehet még megvizsgálni a Szentendrei3 mérés fluxus ábráját. Ezen az útvonalon a gépjármű többször keresztül hajtott egy körforgalmon. A fluxus ábrán (4.29 ábra, Szentendrei3 mérés), ahol a fluxus hullámzik,ott a gépjármű a körforgalmon hajtott keresztül. A 4.31 ábrán tematikusan is ábrázolva vannak ennek a mérésnek a fluxus értékei. Megfigyelhető, hogy a körforgalom két átellenes részén van az ingadozás két szélső értéke (hullámhegy, hullámvölgy)
25 4.30 ábra: Hirtelen megváltozott fluxus helye 4.31 ábra: Fluxus térkép
26 4.7 Úthullámosság Az Auchan1 és Auchan2 mérésnél az útburkolat hullámos volt, a szabályos közönként beépített esővíz elvezető lefolyók miatt. Mivel az utazás komfortját érezhetően negatív irányba befolyásoló volt a hullámosság, ezért valószínű volt, hogy a mérési eredményekben is jelentkezni fog. A 4.32 ábrán az Auchan1 roll mérés (roll görbe és a normált roll görbe) azon részlete látható, ami akkor készült, amikor a gépjármű a hullámos útburkolaton hajtott keresztül. Jól látszik, hogy a görbe hullámos, ez azt valószínűsíti, hogy a mérési eredmények az útburkolatról is adnak visszajelzést ábra Az úthullámosság elemzésének első lépéseként a hullámhegyek távolságának meghatározása történt meg. Ennek eredményét a 4.33 ábra mutatja. Az ábrán látszik, hogy a hullámhegyek nem egyenlő távolságra vannak egymástól, pedig a helyszínen úgy tűnt, hogy a lefolyók távolsága megegyezik. Második lépésként a normált görbe Fourier transzformáltja készült el (4.34 ábra), aminek alkalmazása bevett szokás a jelfeldolgozásban. Ennek segítségével a tetszőleges periodicitású jel (jelen esetben a roll görbe) hullámösszetevőkre bontható szét és meghatározhatóak azok a frekvenciák, amelyek jelentősen befolyásolják a görbe jellegét. A 4.34 ábrán látható a Fourier elemzés eredménye, azért csak a fele látható a teljes eredménynek, mivel az ábra teljesen szimmetrikus, így csak a baloldala lett ábrázolva. Sajnos további elemzésre lenne szükség ahhoz, hogy meg lehessen határozni ezekből, az eredményekből a hullámosságot okozó jelfrekvenciákat. Az idő rövidsége miatt erre nem került sor, de a későbbiekben egy másik projekt keretében meg fog történni
27 4.33 ábra: Hullámhegyek távolsága 4.34 ábra: Fourier transzformáció eredménye
28 5. KONKLÚZIÓ ÉS KITEKINTÉS Az általunk vizsgált Crossbow INS-műszerek az olcsóbb kategóriába tartoznak. Tapasztalataink szerint a NAV420-as műszerbe beépített Kálmán-szűrő igen leegyszerűsített, a GPS-mérések kiugró értékeit (pl. magasság) nem csillapítja, az inerciális méréssel meghatározott paraméterekkel csak nagyon kis mértékben befolyásolja a helymeghatározást. A szögek meghatározásában viszont a GPS ellenőrző hatása érvényesül, ahogy a yaw-ábrákon összehasonlítottuk. A pozíció számításának tapasztalati frekvenciája (~4 Hz) is csak a GPS-mérés frekvenciájával egyezik. A műszerekkel mért mágneses fluxusban érdekes megfigyeléseket tettünk, amely tapasztalatainkat további terepi méréssel fogjuk ellenőrizni: É-D-i szabályosság fedezhető fel az eddig elvégzett mérésekben. Tervezzük, hogy teljesen más helyszínen, más időpontban, más mérési körülmények között tovább vizsgáljuk e jelenséget. Az INS berendezéssel az útburkolat hullámosságára lehet objektív mérést végezni; ezt igazoltuk a roll adatokból levezetett hullámosság vizsgálatakor. Az úttervező és -építő szakmában elterjedt mérőszámokat tervezzük meghatározni az INS-sel végzett mérésekből, továbbá teljeskörű Fourier jelelemzést szeretnénk végrehajtani. A tesztelt AHRS berendezés mérsékelten tűnik mobil térképező rendszerbe építhetőnek, a NAV420-as külön írt Kálmán-szűrővel talán integrálható
29 6. IRODALOMJEGYZÉK [1] Crossbow: AHRS400 Series Users Manual [2] Crossbow: NAV420_Series_Manual_ _B [3] The Mathworks Inc.: Matlab Help [4] Kraus, K.: Photogrammetrie Band 1, Walter de Gruyter, Berlin, 2004 [5] Bronstein, I.N. Szemengyajev, K.A. Musiol, G. Mühlig, H.: Matematikai kézikönyv, Typotex, Budapest, 2000 [6] Farrel, J.A. Barth, M.: The Global Positioning System & Inertial Navigation, McGraw Hill, New York, 1999 [7] McGlone, J.C. (Ed.): Manual of Photogrammetry, ASPRS,
30 7. MELLÉKLET 7.1 Mérési útvonalak GPS/INS MÉRÉSEK TÉRINFORMATIKAI ELEMZÉSE M1: Szentendrei1 mérési útvonal
31 M2: Szentendrei2 mérési útvonal
32 M3: Szentendrei3 mérési útvonal
33 M4: Szentendrei4 mérési útvonal
34 M5: Auchan1 mérési útvonal
35 M6:Auchan2 mérési útvonal
36 7.2 Hossz-szelvények GPS/INS MÉRÉSEK TÉRINFORMATIKAI ELEMZÉSE H1: Szentendrei1 hossz-szelvény H2: Szentendrei2 hossz-szelvény
37 H3: Szentendrei3 hossz-szelvény H4: Szentendrei4 hossz-szelvény
38 H5: Auchan1 hossz-szelvény H6: Auchan2 hossz-szelvény
RTCM alapú VITEL transzformáció felhasználó oldali beállítása Trimble Survey Controller szoftver használata esetén
 RTCM alapú VITEL transzformáció felhasználó oldali beállítása Trimble Survey Controller szoftver használata esetén A http://www.gnssnet.hu/valos_trafo.php weboldalról letöltött RTCM VITEL.dc nevű Trimble
RTCM alapú VITEL transzformáció felhasználó oldali beállítása Trimble Survey Controller szoftver használata esetén A http://www.gnssnet.hu/valos_trafo.php weboldalról letöltött RTCM VITEL.dc nevű Trimble
A Föld alakja TRANSZFORMÁCIÓ. Magyarországon még használatban lévő vetületi rendszerek. Miért kell transzformálni? Főbb transzformációs lehetőségek
 TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
TRANSZFORMÁCIÓ A Föld alakja -A föld alakja: geoid (az a felület, amelyen a nehézségi gyorsulás értéke állandó) szabálytalan alak, kezelése nehéz -A geoidot ellipszoiddal közelítjük -A földfelszíni pontokat
Grafikonok automatikus elemzése
 Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Grafikonok automatikus elemzése MIT BSc önálló laboratórium konzulens: Orosz György 2016.05.18. A feladat elsődleges célkitűzései o eszközök adatlapján található grafikonok feldolgozása, digitalizálása
Mozgásmodellezés. Lukovszki Csaba. Navigációs és helyalapú szolgáltatások és alkalmazások (VITMMA07)
") TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
TÁVKÖZLÉSI ÉS MÉDIAINFORMATIKAI TANSZÉK () BUDAPESTI MŰSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM (BME) Mozgásmodellezés Lukovszki Csaba Áttekintés» Probléma felvázolása» Szabadsági fokok» Diszkretizált» Hibát
ÚTÁLLAPOT FELMÉRÉS INTEGRÁLT MÉRŐRENDSZERREL
 ÚTÁLLAPOT FELMÉRÉS INTEGRÁLT MÉRŐRENDSZERREL PhD értekezés tézisei KERTÉSZ IMRE Fotogrammetria és Térinformatika Tanszék Budapest, 2011 1 A kutatás előzményei A mobil térképezés gyorsan fejlődő terület;
ÚTÁLLAPOT FELMÉRÉS INTEGRÁLT MÉRŐRENDSZERREL PhD értekezés tézisei KERTÉSZ IMRE Fotogrammetria és Térinformatika Tanszék Budapest, 2011 1 A kutatás előzményei A mobil térképezés gyorsan fejlődő terület;
A fűrészmozgás kinetikai vizsgálata
 A fűrészmozgás kinetikai vizsgálata Az alábbi dolgozat az 1988 - ban Sopronban, a kandidátusi fokozat elnyerése céljából írt értekezésem alapján készült, melynek címe: Balesetvédelmi és környezetkímélő
A fűrészmozgás kinetikai vizsgálata Az alábbi dolgozat az 1988 - ban Sopronban, a kandidátusi fokozat elnyerése céljából írt értekezésem alapján készült, melynek címe: Balesetvédelmi és környezetkímélő
GPS mérési jegyz könyv
 GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
GPS mérési jegyz könyv Mérést végezte: Csutak Balázs, Laczkó Hunor Mérés helye: ITK 320. terem és az egyetem környéke Mérés ideje: 2016.03.16 A mérés célja: Ismerkedés a globális helymeghatározó rendszerrel,
Matematika 11 Koordináta geometria. matematika és fizika szakos középiskolai tanár. > o < szeptember 27.
 Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Matematika 11 Koordináta geometria Juhász László matematika és fizika szakos középiskolai tanár > o < 2015. szeptember 27. copyright: c Juhász László Ennek a könyvnek a használatát szerzői jog védi. A
Sokkia gyártmányú RTK GPS rendszer
 Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
Sokkia gyártmányú RTK GPS rendszer A leírást készítette: Deákvári József, intézeti mérnök Az FVM Mezőgazdasági Gépesítési Intézet 2005-ben újabb műszerekkel gyarapodott. Beszerzésre került egy Sokkia gyártmányú
JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ
 Fizika középszint ÉRETTSÉGI VIZSGA 2005. november 5. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI MINISZTÉRIUM A dolgozatokat az útmutató utasításai szerint, jól követhetően
Fizika középszint ÉRETTSÉGI VIZSGA 2005. november 5. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI MINISZTÉRIUM A dolgozatokat az útmutató utasításai szerint, jól követhetően
TÉRINFORMATIKA II. Dr. Kulcsár Balázs főiskolai docens. Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék
 TÉRINFORMATIKA II. Dr. Kulcsár Balázs főiskolai docens Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék TÁJÉKOZTATÁS TANTÁRGYI TEMATIKA 1 Előadás 1. GPS műszerek és kapcsolódó szoftvereik bemutatása
TÉRINFORMATIKA II. Dr. Kulcsár Balázs főiskolai docens Debreceni Egyetem Műszaki Kar Műszaki Alaptárgyi Tanszék TÁJÉKOZTATÁS TANTÁRGYI TEMATIKA 1 Előadás 1. GPS műszerek és kapcsolódó szoftvereik bemutatása
Egyszerű számítási módszer bolygók és kisbolygók oályáj ának meghatározására
 Egyszerű számítási módszer bolygók és kisbolygók oályáj ának meghatározására A bolygók és kisbolygók pályájának analitikus meghatározása rendszerint több éves egyetemi előtanulmányokat igényel. Ennek oka
Egyszerű számítási módszer bolygók és kisbolygók oályáj ának meghatározására A bolygók és kisbolygók pályájának analitikus meghatározása rendszerint több éves egyetemi előtanulmányokat igényel. Ennek oka
Transzformátor rezgés mérés. A BME Villamos Energetika Tanszéken
 Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
Transzformátor rezgés mérés A BME Villamos Energetika Tanszéken A valóság egyszerűsítése, modellezés. A mérés tervszerűen végrehajtott tevékenység, ezért a bonyolult valóságos rendszert először egyszerűsítik.
(Forrás:
 Döntő 2017. február 18. Feladat: Okos autó Ma már sok autóba helyezhető olyan speciális eszköz létezik, amely "a gépjármű szabványos diagnosztikai portjára csatlakozik, majd egy felhő alapú informatikai
Döntő 2017. február 18. Feladat: Okos autó Ma már sok autóba helyezhető olyan speciális eszköz létezik, amely "a gépjármű szabványos diagnosztikai portjára csatlakozik, majd egy felhő alapú informatikai
Straight Edge Compact
 Straight Edge Compact Bevezetés Egyenességmérő készülék A különböző acélszerkezetek gyártásánál és szerelésénél az egységek összekapcsolását biztosító csavaros és hegesztett kötések gyakran vezethetnek
Straight Edge Compact Bevezetés Egyenességmérő készülék A különböző acélszerkezetek gyártásánál és szerelésénél az egységek összekapcsolását biztosító csavaros és hegesztett kötések gyakran vezethetnek
Takács Bence: Geodéziai Műszaki Ellenőrzés. Fővárosi és Pest Megyei Földmérő Nap és Továbbképzés március 22.
 Takács Bence: Geodéziai Műszaki Ellenőrzés Fővárosi és Pest Megyei Földmérő Nap és Továbbképzés 2018. március 22. VÁZLAT Mit jelent a geodéziai műszaki ellenőrzés? Példák: Ki? Mit? Miért ellenőriz? résfal
Takács Bence: Geodéziai Műszaki Ellenőrzés Fővárosi és Pest Megyei Földmérő Nap és Továbbképzés 2018. március 22. VÁZLAT Mit jelent a geodéziai műszaki ellenőrzés? Példák: Ki? Mit? Miért ellenőriz? résfal
Regresszió számítás. Tartalomjegyzék: GeoEasy V2.05+ Geodéziai Kommunikációs Program
 Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Regresszió számítás GeoEasy V2.05+ Geodéziai Kommunikációs Program DigiKom Kft. 2006-2010 Tartalomjegyzék: Egyenes x változik Egyenes y változik Egyenes y és x változik Kör Sík z változik Sík y, x és z
Navigációs GPS adatok kezelése QGIS programmal (1.4 verzió) Összeállította dr. Siki Zoltán
 Összeállította dr. Siki Zoltán") Navigációs GPS adatok kezelése QGIS programmal (1.4 verzió) Összeállította dr. Siki Zoltán A QGIS program GPS eszközök modulja segítségével kétirányú kommunikációt folytathatunk a navigációs GPS vevőnkkel.
Navigációs GPS adatok kezelése QGIS programmal (1.4 verzió) Összeállította dr. Siki Zoltán A QGIS program GPS eszközök modulja segítségével kétirányú kommunikációt folytathatunk a navigációs GPS vevőnkkel.
Multifunkcionális, multimédia elemeket tartalmazó mobil elérésű távoktatási tananyag összeállítása és tesztelése
 Multifunkcionális, multimédia elemeket tartalmazó mobil elérésű távoktatási tananyag összeállítása és tesztelése Busznyák János bjs@georgikon.hu Veszprémi Egyetem, Georgikon, Mezőgazdaságtudományi Kar,
Multifunkcionális, multimédia elemeket tartalmazó mobil elérésű távoktatási tananyag összeállítása és tesztelése Busznyák János bjs@georgikon.hu Veszprémi Egyetem, Georgikon, Mezőgazdaságtudományi Kar,
Esri Arcpad 7.0.1. Utó- feldolgozás. Oktatási anyag - utókorrekció
 Esri Arcpad 7.0.1 & MobileMapper CE Utó- feldolgozás Oktatási anyag - utókorrekció Tartalomjegyzék GPS- MÉRÉSEK UTÓ- FELDOLGOZÁSA... 3 1.1 MŰHOLD ADATOK GYŰJTÉSÉNEK ELINDÍTÁSA, A ESRI ArcPad PROGRAMMAL
Esri Arcpad 7.0.1 & MobileMapper CE Utó- feldolgozás Oktatási anyag - utókorrekció Tartalomjegyzék GPS- MÉRÉSEK UTÓ- FELDOLGOZÁSA... 3 1.1 MŰHOLD ADATOK GYŰJTÉSÉNEK ELINDÍTÁSA, A ESRI ArcPad PROGRAMMAL
Keresztmetszet másodrendű nyomatékainak meghatározása
 BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
BUDAPEST MŰSZAK ÉS GAZDASÁGTUDOMÁNY EGYETEM Keresztmetszet másodrendű nyomatékainak meghatározása Segédlet a Szilárdságtan c tárgy házi feladatához Készítette: Lehotzky Dávid Budapest, 205 február 28 ábra
Vizuális adatelemzés - Gyakorlat. Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék
 Vizuális adatelemzés - Gyakorlat Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Adatelemzés szerepe a rendszermodellezésben Lényeges paraméterek meghatározása
Vizuális adatelemzés - Gyakorlat Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék Adatelemzés szerepe a rendszermodellezésben Lényeges paraméterek meghatározása
RTCM alapú VITEL transzformáció felhasználó oldali beállítása Spectra Precision Survey Pro Recon szoftver használata esetén
 RTCM alapú VITEL transzformáció felhasználó oldali beállítása Spectra Precision Survey Pro Recon szoftver használata esetén A http://www.gnssnet.hu/valos_trafo.php weboldalon található, Spectra Precision
RTCM alapú VITEL transzformáció felhasználó oldali beállítása Spectra Precision Survey Pro Recon szoftver használata esetén A http://www.gnssnet.hu/valos_trafo.php weboldalon található, Spectra Precision
BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM
 BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes Modellezés Házi Feladat Készítete: Magyar Bálint Dátum: 2008. 01. 01. A feladat kiírása A számítógépes modellezés c. tárgy házi feladataként
BUDAPESTI MŐSZAKI ÉS GAZDASÁGTUDOMÁNYI EGYETEM Számítógépes Modellezés Házi Feladat Készítete: Magyar Bálint Dátum: 2008. 01. 01. A feladat kiírása A számítógépes modellezés c. tárgy házi feladataként
TestLine - nummulites_gnss Minta feladatsor
 1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
1.* Egy műholdas helymeghatározás lehet egyszerre abszolút és kinematikus. 2.* műholdak pillanatnyi helyzetéből és a megmért távolságokból számítható a vevő pozíciója. 3.* 0:55 Nehéz kinai BEIDOU, az amerikai
Matematikai geodéziai számítások 10.
 Matematikai geodéziai számítások 10. Hibaellipszis, talpponti görbe és közepes ponthiba Dr. Bácsatyai, László Matematikai geodéziai számítások 10.: Hibaellipszis, talpponti görbe és Dr. Bácsatyai, László
Matematikai geodéziai számítások 10. Hibaellipszis, talpponti görbe és közepes ponthiba Dr. Bácsatyai, László Matematikai geodéziai számítások 10.: Hibaellipszis, talpponti görbe és Dr. Bácsatyai, László
A PPP. a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján
 GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
GISopen konferencia, Székesfehérvár, 2017. 04. 11-13. A PPP a vonatkoztatási rendszer, az elmélet és gyakorlat összefüggése egy Fehérvár környéki kísérleti GNSS-mérés tapasztalatai alapján Busics György
Forogj! Az [ 1 ] munkában találtunk egy feladatot, ami beindította a HD - készítési folyamatokat. Eredményei alább olvashatók. 1.
![Forogj! Az [ 1 ] munkában találtunk egy feladatot, ami beindította a HD - készítési folyamatokat. Eredményei alább olvashatók. 1.](/thumbs/27/12197964.jpg "Forogj! Az [ 1 ] munkában találtunk egy feladatot, ami beindította a HD - készítési folyamatokat. Eredményei alább olvashatók. 1.") 1 Forogj! Az [ 1 ] munkában találtunk egy feladatot, ami beindította a HD - készítési folyamatokat. Eredményei alább olvashatók. 1. Feladat Egy G gépkocsi állandó v 0 nagyságú sebességgel egyenes úton
1 Forogj! Az [ 1 ] munkában találtunk egy feladatot, ami beindította a HD - készítési folyamatokat. Eredményei alább olvashatók. 1. Feladat Egy G gépkocsi állandó v 0 nagyságú sebességgel egyenes úton
Teljesítményprognosztizáló program FELHASZNÁLÓI KÉZIKÖNYV
 Teljesítményprognosztizáló FELHASZNÁLÓI KÉZIKÖNYV Tartalomjegyzék 1. A szoftver feladata...3 2. Rendszerigény...3 3. A szoftver telepítése...3 4. A szoftver használata...3 4.1. Beállítások...3 4.1.1. Elszámolási
Teljesítményprognosztizáló FELHASZNÁLÓI KÉZIKÖNYV Tartalomjegyzék 1. A szoftver feladata...3 2. Rendszerigény...3 3. A szoftver telepítése...3 4. A szoftver használata...3 4.1. Beállítások...3 4.1.1. Elszámolási
A II. kategória Fizika OKTV mérési feladatainak megoldása
 Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Nyomaték (x 0 Nm) O k t a t á si Hivatal A II. kategória Fizika OKTV mérési feladatainak megoldása./ A mágnes-gyűrűket a feladatban meghatározott sorrendbe és helyre rögzítve az alábbi táblázatban feltüntetett
Méréselmélet és mérőrendszerek 2. ELŐADÁS (1. RÉSZ)
") Méréselmélet és mérőrendszerek 2. ELŐADÁS (1. RÉSZ) KÉSZÍTETTE: DR. FÜVESI VIKTOR 2016. 10. Mai témáink o A hiba fogalma o Méréshatár és mérési tartomány M é r é s i h i b a o A hiba megadása o A hiba
Méréselmélet és mérőrendszerek 2. ELŐADÁS (1. RÉSZ) KÉSZÍTETTE: DR. FÜVESI VIKTOR 2016. 10. Mai témáink o A hiba fogalma o Méréshatár és mérési tartomány M é r é s i h i b a o A hiba megadása o A hiba
Az ErdaGIS térinformatikai keretrendszer
 Az ErdaGIS térinformatikai keretrendszer Két évtized tapasztalatát sűrítettük ErdaGIS térinformatikai keretrendszerünkbe, mely moduláris felépítésével széleskörű felhasználói réteget céloz, és felépítését
Az ErdaGIS térinformatikai keretrendszer Két évtized tapasztalatát sűrítettük ErdaGIS térinformatikai keretrendszerünkbe, mely moduláris felépítésével széleskörű felhasználói réteget céloz, és felépítését
DIGITÁLIS TEREPMODELL A TÁJRENDEZÉSBEN
 DIGITÁLIS TEREPMODELL A TÁJRENDEZÉSBEN DR. GIMESI LÁSZLÓ Bevezetés Pécsett és környékén végzett bányászati tevékenység felszámolása kapcsán szükségessé vált az e tevékenység során keletkezett meddők, zagytározók,
DIGITÁLIS TEREPMODELL A TÁJRENDEZÉSBEN DR. GIMESI LÁSZLÓ Bevezetés Pécsett és környékén végzett bányászati tevékenység felszámolása kapcsán szükségessé vált az e tevékenység során keletkezett meddők, zagytározók,
Szá molá si feládáttí pusok á Ko zgázdásá gtán I. (BMEGT30A003) tá rgy zá rthelyi dolgozátá hoz
 tá rgy zá rthelyi dolgozátá hoz") Szá molá si feládáttí pusok á Ko zgázdásá gtán I. (BMEGT30A003) tá rgy zá rthelyi dolgozátá hoz 1. feladattípus a megadott adatok alapján lineáris keresleti, vagy kínálati függvény meghatározása 1.1. feladat
Szá molá si feládáttí pusok á Ko zgázdásá gtán I. (BMEGT30A003) tá rgy zá rthelyi dolgozátá hoz 1. feladattípus a megadott adatok alapján lineáris keresleti, vagy kínálati függvény meghatározása 1.1. feladat
Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv
 Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv Lódi Péter(D1WBA1) Módli Hunor(HHW6Q9) 2015 Április 15. Mérés helye: Mérés ideje: Mérés tárgya: Mérés eszköze: PPKE-ITK 3. emeleti 321-es Mérőlabor,
Bevezetés a méréstechinkába, és jelfeldologzásba jegyzőkönyv Lódi Péter(D1WBA1) Módli Hunor(HHW6Q9) 2015 Április 15. Mérés helye: Mérés ideje: Mérés tárgya: Mérés eszköze: PPKE-ITK 3. emeleti 321-es Mérőlabor,
A 2017/2018. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA II. KATEGÓRIA JAVÍTÁSI ÚTMUTATÓ. Pohár rezonanciája
 Oktatási Hivatal A 017/018. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA II. KATEGÓRIA JAVÍTÁSI ÚTMUTATÓ Pohár rezonanciája A mérőberendezés leírása: A mérőberendezés egy változtatható
Oktatási Hivatal A 017/018. tanévi Országos Középiskolai Tanulmányi Verseny döntő forduló FIZIKA II. KATEGÓRIA JAVÍTÁSI ÚTMUTATÓ Pohár rezonanciája A mérőberendezés leírása: A mérőberendezés egy változtatható
FIZIKA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ
 Fizika középszint 1413 ÉRETTSÉGI VIZSGA 014. május 19. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ EMBERI ERŐFORRÁSOK MINISZTÉRIUMA A dolgozatokat az útmutató utasításai szerint,
Fizika középszint 1413 ÉRETTSÉGI VIZSGA 014. május 19. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ EMBERI ERŐFORRÁSOK MINISZTÉRIUMA A dolgozatokat az útmutató utasításai szerint,
Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással
 Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel.: 06-27-200-930 Mobil: 06-30-867-2570
Mobil térinformatikai feladatmegoldások támogatása GNSS szolgáltatással Horváth Tamás FÖMI Kozmikus Geodéziai Obszervatórium horvath@gnssnet.hu www.gnssnet.hu Tel.: 06-27-200-930 Mobil: 06-30-867-2570
1. ábra Modell tér I.
 1 Veres György Átbocsátó képesség vizsgálata számítógépes modell segítségével A kiürítés szimuláló számítógépes modellek egyes apró, de igen fontos részletek vizsgálatára is felhasználhatóak. Az átbocsátóképesség
1 Veres György Átbocsátó képesség vizsgálata számítógépes modell segítségével A kiürítés szimuláló számítógépes modellek egyes apró, de igen fontos részletek vizsgálatára is felhasználhatóak. Az átbocsátóképesség
Al-Mg-Si háromalkotós egyensúlyi fázisdiagram közelítő számítása
 l--si háromalkotós egyensúlyi fázisdiagram közelítő számítása evezetés Farkas János 1, Dr. Roósz ndrás 1 doktorandusz, tanszékvezető egyetemi tanár Miskolci Egyetem nyag- és Kohómérnöki Kar Fémtani Tanszék
l--si háromalkotós egyensúlyi fázisdiagram közelítő számítása evezetés Farkas János 1, Dr. Roósz ndrás 1 doktorandusz, tanszékvezető egyetemi tanár Miskolci Egyetem nyag- és Kohómérnöki Kar Fémtani Tanszék
ANC-S SD-NAVI HIBAELHÁRÍTÁSI ELJÁRÁSA (1.00 verzió) Áttekintés és lábkiosztás A FŐKAPCSOLÓ EGYÁLTALÁN NEM MŰKÖDIK (nincs hang és nincs kijelzés)
 Áttekintés és lábkiosztás A FŐKAPCSOLÓ EGYÁLTALÁN NEM MŰKÖDIK (nincs hang és nincs kijelzés)") 1. TARTALOM Ügyfél panasza Áttekintés és lábkiosztás A FŐKAPCSOLÓ EGYÁLTALÁN NEM MŰKÖDIK (nincs hang és nincs kijelzés) NINCS HANG (kijelző OK) NINCS KIJELZŐ (hang OK) GPS probléma Bluetooth USB lejátszás
1. TARTALOM Ügyfél panasza Áttekintés és lábkiosztás A FŐKAPCSOLÓ EGYÁLTALÁN NEM MŰKÖDIK (nincs hang és nincs kijelzés) NINCS HANG (kijelző OK) NINCS KIJELZŐ (hang OK) GPS probléma Bluetooth USB lejátszás
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk
 Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Haladó mozgások A hely és a mozgás viszonylagos. A testek helyét, mozgását valamilyen vonatkoztatási ponthoz, vonatkoztatási rendszerhez képest adjuk meg, ahhoz viszonyítjuk. pl. A vonatban utazó ember
Az egyenes ellipszishenger ferde síkmetszeteiről
 1 Az egyenes ellipszishenger ferde síkmetszeteiről Vegyünk egy a és b féltengelyekkel bíró ellipszist a vezérgörbét, majd az ellipszis O centrumában állítsunk merőlegest az ellipszis síkjára. Ez a merőleges
1 Az egyenes ellipszishenger ferde síkmetszeteiről Vegyünk egy a és b féltengelyekkel bíró ellipszist a vezérgörbét, majd az ellipszis O centrumában állítsunk merőlegest az ellipszis síkjára. Ez a merőleges
Utak és környezetük tervezése
 Dr. Fi István Utak és környezetük tervezése 3A előadás: Vonalvezetési elvek Vonalvezetési elvek Vonalvezetés az útvonalat alkotó egyenesek és ívek elrendezése. A vonalvezetés ismérve az ívesség (I) (lásd
Dr. Fi István Utak és környezetük tervezése 3A előadás: Vonalvezetési elvek Vonalvezetési elvek Vonalvezetés az útvonalat alkotó egyenesek és ívek elrendezése. A vonalvezetés ismérve az ívesség (I) (lásd
Szélermvek termelésének eljelzése
 Mérési útmutató Energetikai informatika II. Szélermvek termelésének eljelzése A mérést tervezte, összeállította: Dr. Kádár Péter A mérésért felels: Dr. Kádár Péter A mérési útmutatót összeállította: Dr.
Mérési útmutató Energetikai informatika II. Szélermvek termelésének eljelzése A mérést tervezte, összeállította: Dr. Kádár Péter A mérésért felels: Dr. Kádár Péter A mérési útmutatót összeállította: Dr.
EGY ABLAK - GEOMETRIAI PROBLÉMA
 EGY ABLAK - GEOMETRIAI PROBLÉMA Írta: Hajdu Endre A számítógépemhez tartozó két hangfal egy-egy négyzet keresztmetszetű hasáb hely - szűke miatt az ablakpárkányon van elhelyezve (. ábra).. ábra Hogy az
EGY ABLAK - GEOMETRIAI PROBLÉMA Írta: Hajdu Endre A számítógépemhez tartozó két hangfal egy-egy négyzet keresztmetszetű hasáb hely - szűke miatt az ablakpárkányon van elhelyezve (. ábra).. ábra Hogy az
Befordulás sarkon bútorral
 Befordulás sarkon bútorral Bizonyára volt már olyan élményed, hogy bútort kellett cipelned, és nem voltál biztos benne, hogy be tudjátok - e vinni a szobába. Erről jutott eszembe az alábbi feladat. Adott
Befordulás sarkon bútorral Bizonyára volt már olyan élményed, hogy bútort kellett cipelned, és nem voltál biztos benne, hogy be tudjátok - e vinni a szobába. Erről jutott eszembe az alábbi feladat. Adott
A tanulók gyűjtsenek saját tapasztalatot az adott szenzorral mérhető tartomány határairól.
 A távolságszenzorral kapcsolatos kísérlet, megfigyelés és mérések célkitűzése: A diákok ismerjék meg az ultrahangos távolságérzékelő használatát. Szerezzenek jártasságot a kezelőszoftver használatában,
A távolságszenzorral kapcsolatos kísérlet, megfigyelés és mérések célkitűzése: A diákok ismerjék meg az ultrahangos távolságérzékelő használatát. Szerezzenek jártasságot a kezelőszoftver használatában,
A szabályos sokszögek közelítő szerkesztéséhez
 1 A szabályos sokszögek közelítő szerkesztéséhez A síkmértani szerkesztések között van egy kedvencünk: a szabályos n - szög közelítő szerkesztése. Azért vívta ki nálunk ezt az előkelő helyet, mert nagyon
1 A szabályos sokszögek közelítő szerkesztéséhez A síkmértani szerkesztések között van egy kedvencünk: a szabályos n - szög közelítő szerkesztése. Azért vívta ki nálunk ezt az előkelő helyet, mert nagyon
Méréselmélet és mérőrendszerek
 Méréselmélet és mérőrendszerek 6. ELŐADÁS KÉSZÍTETTE: DR. FÜVESI VIKTOR 2016. 10. Mai témáink o A hiba fogalma o Méréshatár és mérési tartomány M é r é s i h i b a o A hiba megadása o A hiba eredete o
Méréselmélet és mérőrendszerek 6. ELŐADÁS KÉSZÍTETTE: DR. FÜVESI VIKTOR 2016. 10. Mai témáink o A hiba fogalma o Méréshatár és mérési tartomány M é r é s i h i b a o A hiba megadása o A hiba eredete o
Egy újabb látószög - feladat
 1 Egy újabb látószög - feladat A feladat Adott az O középpontú, R sugarú körön az α szöggel jellemzett P pont. Határozzuk meg, hogy mekkora ϑ szög alatt látszik a P pontból a vízszintes átmérő - egyenes
1 Egy újabb látószög - feladat A feladat Adott az O középpontú, R sugarú körön az α szöggel jellemzett P pont. Határozzuk meg, hogy mekkora ϑ szög alatt látszik a P pontból a vízszintes átmérő - egyenes
PISA2000. Nyilvánosságra hozott feladatok matematikából
 PISA2000 Nyilvánosságra hozott feladatok matematikából Tartalom Tartalom 3 Almafák 8 Földrész területe 12 Háromszögek 14 Házak 16 Versenyautó sebessége Almafák M136 ALMAFÁK Egy gazda kertjében négyzetrács
PISA2000 Nyilvánosságra hozott feladatok matematikából Tartalom Tartalom 3 Almafák 8 Földrész területe 12 Háromszögek 14 Házak 16 Versenyautó sebessége Almafák M136 ALMAFÁK Egy gazda kertjében négyzetrács
Mio Technology Limited www.mio-tech.be C510, C710. Gyors használati utasítás a Mio Map v3 programhoz. Magyar
 Mio Technology Limited www.mio-tech.be C510, C710 Gyors használati utasítás a Mio Map v3 programhoz Magyar 2 A Fő menü Amikor a Mio Map elindul, a fő menü jelenik meg. Innen lehet elérni a Mio Map minden
Mio Technology Limited www.mio-tech.be C510, C710 Gyors használati utasítás a Mio Map v3 programhoz Magyar 2 A Fő menü Amikor a Mio Map elindul, a fő menü jelenik meg. Innen lehet elérni a Mio Map minden
INGATLANVAGYON-KATASZTER SZAKRENDSZER
 INGATLANVAGYON-KATASZTER SZAKRENDSZER 59 Az Ingatlanvagyon-kataszter szakrendszer (továbbiakban: IVK rendszer) a Keretrendszerrel és a Gazdálkodási szakrendszerrel működik integráltan. A tájékoztató célja,
INGATLANVAGYON-KATASZTER SZAKRENDSZER 59 Az Ingatlanvagyon-kataszter szakrendszer (továbbiakban: IVK rendszer) a Keretrendszerrel és a Gazdálkodási szakrendszerrel működik integráltan. A tájékoztató célja,
Fázisátalakulások vizsgálata
 KLASSZIKUS FIZIKA LABORATÓRIUM 6. MÉRÉS Fázisátalakulások vizsgálata Mérést végezte: Enyingi Vera Atala ENVSAAT.ELTE Mérés időpontja: 2011. szeptember 28. Szerda délelőtti csoport 1. A mérés célja A mérés
KLASSZIKUS FIZIKA LABORATÓRIUM 6. MÉRÉS Fázisátalakulások vizsgálata Mérést végezte: Enyingi Vera Atala ENVSAAT.ELTE Mérés időpontja: 2011. szeptember 28. Szerda délelőtti csoport 1. A mérés célja A mérés
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 10. GPS, GPRS (mobilkommunikációs) ismeretek Helymeghatározás GPS rendszer alapelve GNSS rendszerek
GD Dollies Műszaki leírás
 GD Dollies Műszaki leírás A szállítóeszköz elektromos működtetésű, rádiós távvezérlésű két kocsiból álló egység, mely páros és szóló üzemmódban egyaránt használható. Elsősorban beltéri ill. üzemi területen
GD Dollies Műszaki leírás A szállítóeszköz elektromos működtetésű, rádiós távvezérlésű két kocsiból álló egység, mely páros és szóló üzemmódban egyaránt használható. Elsősorban beltéri ill. üzemi területen
TELE-OPERATOR UTS v.14 Field IPTV műszer. Adatlap
 TELE-OPERATOR UTS v.14 Field IPTV műszer Adatlap COMPU-CONSULT Kft. 2009. augusztus 3. Dokumentáció Tárgy: TELE-OPERATOR UTS v.14 Field IPTV műszer Adatlap (6. kiadás) Kiadta: CONSULT-CONSULT Kft. Dátum:
TELE-OPERATOR UTS v.14 Field IPTV műszer Adatlap COMPU-CONSULT Kft. 2009. augusztus 3. Dokumentáció Tárgy: TELE-OPERATOR UTS v.14 Field IPTV műszer Adatlap (6. kiadás) Kiadta: CONSULT-CONSULT Kft. Dátum:
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar. Villamos Energetika Tanszék. Világítástechnika (BME VIVEM 355)
") Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Villamos Energetika Tanszék Világítástechnika (BME VIVEM 355) Beltéri mérés Világítástechnikai felülvizsgálati jegyzőkönyv
Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kar Villamos Energetika Tanszék Világítástechnika (BME VIVEM 355) Beltéri mérés Világítástechnikai felülvizsgálati jegyzőkönyv
Matematikai geodéziai számítások 1.
 Matematikai geodéziai számítások 1 Ellipszoidi számítások, ellipszoid, geoid és terep metszete Dr Bácsatyai, László Created by XMLmind XSL-FO Converter Matematikai geodéziai számítások 1: Ellipszoidi számítások,
Matematikai geodéziai számítások 1 Ellipszoidi számítások, ellipszoid, geoid és terep metszete Dr Bácsatyai, László Created by XMLmind XSL-FO Converter Matematikai geodéziai számítások 1: Ellipszoidi számítások,
Kísérlettervezés alapfogalmak
 Kísérlettervezés alapfogalmak Rendszermodellezés Budapest University of Technology and Economics Fault Tolerant Systems Research Group Budapest University of Technology and Economics Department of Measurement
Kísérlettervezés alapfogalmak Rendszermodellezés Budapest University of Technology and Economics Fault Tolerant Systems Research Group Budapest University of Technology and Economics Department of Measurement
A mérés célkitűzései: A matematikai inga lengésidejének kísérleti vizsgálata, a nehézségi gyorsulás meghatározása.
 A mérés célkitűzései: A matematikai inga lengésidejének kísérleti vizsgálata, a nehézségi gyorsulás meghatározása. Eszközszükséglet: Bunsen állvány lombik fogóval 50 g-os vasból készült súlyok fonál mérőszalag,
A mérés célkitűzései: A matematikai inga lengésidejének kísérleti vizsgálata, a nehézségi gyorsulás meghatározása. Eszközszükséglet: Bunsen állvány lombik fogóval 50 g-os vasból készült súlyok fonál mérőszalag,
_INVHU000_WriteReadParameter.cxf Frekvenciaváltók
 INV-HU-000 A FB feladata A dokumentáció tartalma Szimbólum A CP1H vagy a CP1L PLC és frekvenciaváltó(k) automatikus kommunikációja: _INVHU000_WriteReadParameter A frekvenciaváltó üzemi paramétereinek írása,
INV-HU-000 A FB feladata A dokumentáció tartalma Szimbólum A CP1H vagy a CP1L PLC és frekvenciaváltó(k) automatikus kommunikációja: _INVHU000_WriteReadParameter A frekvenciaváltó üzemi paramétereinek írása,
Nehézségi gyorsulás mérése megfordítható ingával
 Nehézségi gyorsulás mérése megfordítható ingával (Mérési jegyzőkönyv) Hagymási Imre 2007. április 21. (hétfő délelőtti csoport) 1. A mérés elmélete A nehézségi gyorsulás mérésének egy klasszikus módja
Nehézségi gyorsulás mérése megfordítható ingával (Mérési jegyzőkönyv) Hagymási Imre 2007. április 21. (hétfő délelőtti csoport) 1. A mérés elmélete A nehézségi gyorsulás mérésének egy klasszikus módja
FIZIKA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ
 Fizika középszint 051 ÉRETTSÉGI VIZSGA 007. május 14. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI ÉS KULTURÁLIS MINISZTÉRIUM A dolgozatokat az útmutató utasításai
Fizika középszint 051 ÉRETTSÉGI VIZSGA 007. május 14. FIZIKA KÖZÉPSZINTŰ ÍRÁSBELI ÉRETTSÉGI VIZSGA JAVÍTÁSI-ÉRTÉKELÉSI ÚTMUTATÓ OKTATÁSI ÉS KULTURÁLIS MINISZTÉRIUM A dolgozatokat az útmutató utasításai
SSL VPN KAPCSOLAT TELEPÍTÉSI ÚTMUTATÓ
 SSL VPN KAPCSOLAT TELEPÍTÉSI ÚTMUTATÓ GIRODIRECT SZOLGÁLTATÁST IGÉNYBEVEVŐ ÜGYFELEKENEK Verzió: v1.04 Dátum: 2018. január 5. Készítette: A jelen dokumentum tartalma szerzői jogi védelem alatt áll, a mű
SSL VPN KAPCSOLAT TELEPÍTÉSI ÚTMUTATÓ GIRODIRECT SZOLGÁLTATÁST IGÉNYBEVEVŐ ÜGYFELEKENEK Verzió: v1.04 Dátum: 2018. január 5. Készítette: A jelen dokumentum tartalma szerzői jogi védelem alatt áll, a mű
Robotika. Relatív helymeghatározás Odometria
 Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Robotika Relatív helymeghatározás Odometria Differenciális hajtás c m =πd n /nc e c m D n C e n = hány mm-t tesz meg a robot egy jeladó impulzusra = névleges kerék átmérő = jeladó fölbontása (impulzus/ford.)
Túl szűk vagy éppen túl tágas terek 3D-szkennelése a Geodézia Zrt.-nél Stenzel Sándor - Geodézia Zrt. MFTTT 31. Vándorgyűlés, Szekszárd
 Túl szűk vagy éppen túl tágas terek 3D-szkennelése a Geodézia Zrt.-nél Stenzel Sándor - Geodézia Zrt. MFTTT 31. Vándorgyűlés, Szekszárd 3D-szkennelés könnyedén Conti-kápolna (Bp. X.) Megyaszói Ref. Templom
Túl szűk vagy éppen túl tágas terek 3D-szkennelése a Geodézia Zrt.-nél Stenzel Sándor - Geodézia Zrt. MFTTT 31. Vándorgyűlés, Szekszárd 3D-szkennelés könnyedén Conti-kápolna (Bp. X.) Megyaszói Ref. Templom
A loxodrómáról. Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra.
 1 A loxodrómáról Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra. 1. ábra forrása: [ 1 ] Ezen a térképen a szélességi
1 A loxodrómáról Előző írásunkban melynek címe: A Gudermann - függvényről szó esett a Mercator - vetületről,illetve az ezen alapuló térképről 1. ábra. 1. ábra forrása: [ 1 ] Ezen a térképen a szélességi
Radioaktív anyag felezési idejének mérése
 A pályázótársam által ismertetett mérési módszer alkalmazásához Labview szoftverrel készítettem egy mérőműszert, ami lehetőséget nyújt radioaktív anyag felezési idejének meghatározására. 1. ábra: Felhasználói
A pályázótársam által ismertetett mérési módszer alkalmazásához Labview szoftverrel készítettem egy mérőműszert, ami lehetőséget nyújt radioaktív anyag felezési idejének meghatározására. 1. ábra: Felhasználói
Modern Fizika Labor. Fizika BSc. Értékelés: A mérés dátuma: A mérés száma és címe: 12. mérés: Infravörös spektroszkópia. 2008. május 6.
 Modern Fizika Labor Fizika BSc A mérés dátuma: A mérés száma és címe: 12. mérés: Infravörös spektroszkópia Értékelés: A beadás dátuma: 28. május 13. A mérést végezte: 1/5 A mérés célja A mérés célja az
Modern Fizika Labor Fizika BSc A mérés dátuma: A mérés száma és címe: 12. mérés: Infravörös spektroszkópia Értékelés: A beadás dátuma: 28. május 13. A mérést végezte: 1/5 A mérés célja A mérés célja az
Diszkréten mintavételezett függvények
 Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Diszkréten mintavételezett függvények A függvény (jel) értéke csak rögzített pontokban ismert, de köztes pontokban is meg akarjuk becsülni időben mintavételezett jel pixelekből álló műholdkép rácson futtatott
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW
 Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
Quadkopter szimulációja LabVIEW környezetben Simulation of a Quadcopter with LabVIEW T. KISS 1 P. T. SZEMES 2 1University of Debrecen, kiss.tamas93@gmail.com 2University of Debrecen, szemespeter@eng.unideb.hu
BT-R820 Használati utasítás BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1
 BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
BT-R820 Wireless GPS Egység Használati utasítás Dátum: Szeptember, 2006 Verzió: 1.1 1. oldal TARTALOMJEGYZÉK 0. Gyors telepítés...3 1. Bevezetés...4 1.1 Áttekintés...4 1.2 Fő jellemzők...4 1.3 Alkalmazási
Vízszintes kitűzések. 1-3. gyakorlat: Vízszintes kitűzések
 Vízszintes kitűzések A vízszintes kitűzések végrehajtása során általában nem találkozunk bonyolult számítási feladatokkal. A kitűzési munka nehézségeit elsősorban a kedvezőtlen munkakörülmények okozzák,
Vízszintes kitűzések A vízszintes kitűzések végrehajtása során általában nem találkozunk bonyolult számítási feladatokkal. A kitűzési munka nehézségeit elsősorban a kedvezőtlen munkakörülmények okozzák,
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 7. Digitális térképezés, georeferálás, vektorizálás Digitális térkép Fogalma Jellemzői Georeferálás
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 7. Digitális térképezés, georeferálás, vektorizálás Digitális térkép Fogalma Jellemzői Georeferálás
Trimble gépvezérlések
 Trimble gépvezérlések Az amerikai Trimble Navigations műholdvevő rendszerével számos gépvezérlési rendszer üzemeltethető. A vételi pontatlanságokból adódóan műholdas vezérléssel dózert, nyesőládát és kotrógépet
Trimble gépvezérlések Az amerikai Trimble Navigations műholdvevő rendszerével számos gépvezérlési rendszer üzemeltethető. A vételi pontatlanságokból adódóan műholdas vezérléssel dózert, nyesőládát és kotrógépet
INFORMATIKA ÁGAZATI ALKALMAZÁSAI. Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP /1/A
 INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 14. GIS feldolgozás, méréselőkészítés Desktop méréselőkészítés Méréselőkészítés a kontrolleren
INFORMATIKA ÁGAZATI ALKALMAZÁSAI Az Agrármérnöki MSc szak tananyagfejlesztése TÁMOP-4.1.2-08/1/A-2009-0010 14. GIS feldolgozás, méréselőkészítés Desktop méréselőkészítés Méréselőkészítés a kontrolleren
Megyei tervezést támogató alkalmazás
 TeIR (Területfejlesztési és Területrendezési Információs Rendszer) Megyei tervezést támogató alkalmazás Felhasználói útmutató 2015. május Tartalomjegyzék 1. BEVEZETŐ... 3 2. AZ ALKALMAZÁS BEMUTATÁSA...
TeIR (Területfejlesztési és Területrendezési Információs Rendszer) Megyei tervezést támogató alkalmazás Felhasználói útmutató 2015. május Tartalomjegyzék 1. BEVEZETŐ... 3 2. AZ ALKALMAZÁS BEMUTATÁSA...
Síklapokból álló üvegoszlopok laboratóriumi. vizsgálata. Jakab András, doktorandusz. BME, Építőanyagok és Magasépítés Tanszék
 Síklapokból álló üvegoszlopok laboratóriumi vizsgálata Előadó: Jakab András, doktorandusz BME, Építőanyagok és Magasépítés Tanszék Nehme Kinga, Nehme Salem Georges Szilikátipari Tudományos Egyesület Üvegipari
Síklapokból álló üvegoszlopok laboratóriumi vizsgálata Előadó: Jakab András, doktorandusz BME, Építőanyagok és Magasépítés Tanszék Nehme Kinga, Nehme Salem Georges Szilikátipari Tudományos Egyesület Üvegipari
Automatizált frekvenciaátviteli mérőrendszer
 Rendszertechnikai átviteli karakterisztika számítógépes mérése Automatizált frekvenciaátviteli mérőrendszer Samu Krisztián, BME-FOT megvalósítása Labview fejlesztőkörnyezetben Gyakori műszaki feladat,
Rendszertechnikai átviteli karakterisztika számítógépes mérése Automatizált frekvenciaátviteli mérőrendszer Samu Krisztián, BME-FOT megvalósítása Labview fejlesztőkörnyezetben Gyakori műszaki feladat,
Mechanika Kinematika. - Kinematikára: a testek mozgását tanulmányozza anélkül, hogy figyelembe venné a kiváltó
 Mechanika Kinematika A mechanika a fizika része mely a testek mozgásával és egyensúlyával foglalkozik. A klasszikus mechanika, mely a fénysebességnél sokkal kisebb sebességű testekre vonatkozik, feloszlik:
Mechanika Kinematika A mechanika a fizika része mely a testek mozgásával és egyensúlyával foglalkozik. A klasszikus mechanika, mely a fénysebességnél sokkal kisebb sebességű testekre vonatkozik, feloszlik:
4. A kézfogások száma pont Összesen: 2 pont
 I. 1. A páros számokat tartalmazó részhalmazok: 6 ; 8 ; 6 ; 8. { } { } { }. 5 ( a ) 17 Összesen: t = = a a Összesen: ot kaphat a vizsgázó, ha csak két helyes részhalmazt ír fel. Szintén jár, ha a helyes
I. 1. A páros számokat tartalmazó részhalmazok: 6 ; 8 ; 6 ; 8. { } { } { }. 5 ( a ) 17 Összesen: t = = a a Összesen: ot kaphat a vizsgázó, ha csak két helyes részhalmazt ír fel. Szintén jár, ha a helyes
A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK
 A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK - két féle adatra van szükségünk: térbeli és leíró adatra - a térbeli adat előállítása a bonyolultabb. - a költségek nagyjából 80%-a - munkaigényes,
A DIGITÁLIS TÉRKÉP ADATAINAK ELŐÁLLÍTÁSA, ADATNYERÉSI ELJÁRÁSOK - két féle adatra van szükségünk: térbeli és leíró adatra - a térbeli adat előállítása a bonyolultabb. - a költségek nagyjából 80%-a - munkaigényes,
MaxiCont. MOM690 Mikroohm mérő
 MOM690 Mikroohm mérő A nagyfeszültségű megszakítók és szakaszolók karbantartásának fontos része az ellenállás mérése. A nagy áramú kontaktusok és egyéb átviteli elemek ellenállásának mérésére szolgáló
MOM690 Mikroohm mérő A nagyfeszültségű megszakítók és szakaszolók karbantartásának fontos része az ellenállás mérése. A nagy áramú kontaktusok és egyéb átviteli elemek ellenállásának mérésére szolgáló
Beszerelési és kezelési útmutató
 Beszerelési és kezelési útmutató A101 DGPS-vevő Állapot: V3.20150602 3030246900-02-HU Figyelmesen olvassa el és őrizze meg a kezelési útmutatót. A kezelési útmutatót őrizze meg. Impresszum Dokumentum Copyright
Beszerelési és kezelési útmutató A101 DGPS-vevő Állapot: V3.20150602 3030246900-02-HU Figyelmesen olvassa el és őrizze meg a kezelési útmutatót. A kezelési útmutatót őrizze meg. Impresszum Dokumentum Copyright
Maple: Deriváltak és a függvény nevezetes pontjai
 Maple: Deriváltak és a függvény nevezetes pontjai Bevezető Tudjuk, hogy a Maple könnyűszerrel képes végrehajtani a szimbólikus matematikai számításokat, ezért a Maple egy ideális program differenciál-
Maple: Deriváltak és a függvény nevezetes pontjai Bevezető Tudjuk, hogy a Maple könnyűszerrel képes végrehajtani a szimbólikus matematikai számításokat, ezért a Maple egy ideális program differenciál-
MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY
 FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
FVM VIDÉKFEJLESZTÉSI, KÉPZÉSI ÉS SZAKTANÁCSADÁSI INTÉZET NYUGAT MAGYARORSZÁGI EGYETEM GEOINFORMATIKAI KAR MIKOVINY SÁMUEL TÉRINFORMATIKAI EMLÉKVERSENY 2008/2009. TANÉV Az I. FORDULÓ FELADATAI NÉV:... Tudnivalók
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN
 LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
LOKÁLIS IONOSZFÉRA MODELLEZÉS ÉS ALKALMAZÁSA A GNSS HELYMEGHATÁROZÁSBAN Juni Ildikó Budapesti Műszaki és Gazdaságtudományi Egyetem BSc IV. évfolyam Konzulens: Dr. Rózsa Szabolcs MFTT 29. Vándorgyűlés,
Útjelzések, akadályok felismerése valós időben
 Útjelzések, akadályok felismerése valós időben Dr. Hidvégi Timót Széchenyi István Egyetem Győr, 9026, Egyetem tér 1. hidvegi@sze.hu 1. Bevezető Sajnos a közúton a balesetek egy része abból adódik, hogy
Útjelzések, akadályok felismerése valós időben Dr. Hidvégi Timót Széchenyi István Egyetem Győr, 9026, Egyetem tér 1. hidvegi@sze.hu 1. Bevezető Sajnos a közúton a balesetek egy része abból adódik, hogy
A DIPLOMAMUNKA FORMAI KÖVETELMÉNYEI JAVASLAT
 A DIPLOMAMUNKA FORMAI KÖVETELMÉNYEI JAVASLAT A diplomamunka kötelező részei (bekötési sorrendben) 1. Fedőlap - Bal felső sarokban a kiíró tanszék megnevezése (ha két tanszékkel együttműködve dolgozzuk
A DIPLOMAMUNKA FORMAI KÖVETELMÉNYEI JAVASLAT A diplomamunka kötelező részei (bekötési sorrendben) 1. Fedőlap - Bal felső sarokban a kiíró tanszék megnevezése (ha két tanszékkel együttműködve dolgozzuk
Rácsvonalak parancsot. Válasszuk az Elsődleges függőleges rácsvonalak parancs Segédrácsok parancsát!
 Konduktometriás titrálás kiértékelése Excel program segítségével (Office 2007) Alapszint 1. A mérési adatokat írjuk be a táblázat egymás melletti oszlopaiba. Az első oszlopba kerül a fogyás, a másodikba
Konduktometriás titrálás kiértékelése Excel program segítségével (Office 2007) Alapszint 1. A mérési adatokat írjuk be a táblázat egymás melletti oszlopaiba. Az első oszlopba kerül a fogyás, a másodikba
Modellkísérlet szivattyús tározós erőmű hatásfokának meghatározására
 Budapesti Műszaki és Gazdaságtudományi Egyetem Nukleáris Technikai Intézet Hallgatói laboratóriumi gyakorlat Modellkísérlet szivattyús tározós erőmű hatásfokának meghatározására Mintajegyzőkönyv Készítette:
Budapesti Műszaki és Gazdaságtudományi Egyetem Nukleáris Technikai Intézet Hallgatói laboratóriumi gyakorlat Modellkísérlet szivattyús tározós erőmű hatásfokának meghatározására Mintajegyzőkönyv Készítette:
Közlekedési áramlatok Külső mérés ismertetése II. Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék
 Közlekedési áramlatok Külső mérés ismertetése II. Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék A csomópontok és útvonalak minősítésének szükségessége A csomópontok
Közlekedési áramlatok Külső mérés ismertetése II. Közlekedésmérnöki és Járműmérnöki Kar Közlekedésüzemi és Közlekedésgazdasági Tanszék A csomópontok és útvonalak minősítésének szükségessége A csomópontok
Mechanika I-II. Példatár
 Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanika Tanszék Mechanika I-II. Példatár 2012. május 24. Előszó A példatár célja, hogy támogassa a mechanika I. és mechanika II. tárgy oktatását
Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanika Tanszék Mechanika I-II. Példatár 2012. május 24. Előszó A példatár célja, hogy támogassa a mechanika I. és mechanika II. tárgy oktatását
Szabó József CadMap Kft. 29. Vándorgyűlés július Sopron
 Szabó József CadMap Kft. 29. Vándorgyűlés 2013. július 11-13. Sopron TEREP-JÁRÓ 29. Vándorgyűlés 2013. július 11-13. Sopron Szoftver úttalan utakra! Helymeghatározás, adatgyűjtés erdőn-mezőn, hegyen-völgyön
Szabó József CadMap Kft. 29. Vándorgyűlés 2013. július 11-13. Sopron TEREP-JÁRÓ 29. Vándorgyűlés 2013. július 11-13. Sopron Szoftver úttalan utakra! Helymeghatározás, adatgyűjtés erdőn-mezőn, hegyen-völgyön
Jelek és rendszerek 1. 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék
 Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Jelek és rendszerek 1 10/9/2011 Dr. Buchman Attila Informatikai Rendszerek és Hálózatok Tanszék 1 Ajánlott irodalom: FODOR GYÖRGY : JELEK ÉS RENDSZEREK EGYETEMI TANKÖNYV Műegyetemi Kiadó, Budapest, 2006
Gyalogos elütések szimulációs vizsgálata
 Gyalogos elütések szimulációs vizsgálata A Virtual Crash program validációja Dr. Melegh Gábor BME Gépjárművek tanszék Budapest, Magyarország Vida Gábor BME Gépjárművek tanszék Budapest, Magyarország Ing.
Gyalogos elütések szimulációs vizsgálata A Virtual Crash program validációja Dr. Melegh Gábor BME Gépjárművek tanszék Budapest, Magyarország Vida Gábor BME Gépjárművek tanszék Budapest, Magyarország Ing.
DKÜ ZRT. A Portál rendszer felületének általános bemutatása. Felhasználói útmutató. Támogatott böngészők. Felületek felépítése. Információs kártyák
 A Portál rendszer felületének általános bemutatása Felhasználói útmutató Támogatott böngészők Internet Explorer 9+ Firefox (legújabb verzió) Chrome (legújabb verzió) Felületek felépítése Információs kártyák
A Portál rendszer felületének általános bemutatása Felhasználói útmutató Támogatott böngészők Internet Explorer 9+ Firefox (legújabb verzió) Chrome (legújabb verzió) Felületek felépítése Információs kártyák